abstract deep mapping of teuthivorous whales...
TRANSCRIPT

ABSTRACT DEEP MAPPING OF TEUTHIVOROUS WHALES AND THEIR PREY FIELDS
BACKGROUND In the last decade, great progress has been made in understanding the behavior and biology of deep diving whales. Much of this progress has resulted from the development of new technologies such as tagging. While studies of the physical habitat of these whales have been able to keep pace with these advancements, understanding of the available prey, a key component in the biological habitat of these animals, has not. This lag has been driven by the difficulties in studying squid, the primary prey of deep-diving animals like sperm and beaked whales, due to the rapid speed, relatively large size, and depth of these prey animals. Recent advances in acoustic measurements now allow us to use this powerful remote sensing tool to assess squid behavior and distribution in water depths up to 600 m. However, teuthivores or cephalopod feeding whales, like sperm and beaked whales typically feed at depths of 1000 m. The development of a new remote sensing to carry the acoustic instruments needed to assess squid will bridge this gap, providing powerful information on squid to depths of 1200 m. Application of this tool will result in great progress in understanding whale behavior and habitat use and improvements in predictive capabilities of these factors. This advancement is essential for effective estimation and mitigation of noise effects, including those from military sonar systems, on these deep diving marine mammals.
OBJECTIVE Our goal is to develop an effective, easily deployed, adaptable tool for measuring the prey field and sperm and beaked whales to depths of at least 1200 m and utilize this tool as part of the marine mammal sound-exposure experiments funded by the US Office of Naval Research and N45 to understand how prey affects the behavior of deep-diving whales and how this behavior may affect sound exposure risk.
SUMMARY OF SCIENCE AND TECHNOLOGY We propose to:
Modify and integrate a 38 and 120 kHz echosounder into an existing REMUS 600 UUV Develop on board acoustical data processing capabilities within the integrated echosounder
module Conduct initial testing of integrated system in a shallow (< 200m) coastal location Demonstrate capabilities in deep water off the US West Coast Deploy the Echosounder-UUV along with ship-based sampling in partnership with the marine
mammal Behavioral Response Study taking place in southern California in 2013 and 2014 to provide information on squid prey resources and whales simultaneously in areas where the behavior and habitat use of individual deep-diving marine mammals is being measured in detail both during normal conditions and during the use of simulated and operational military sonars
Quantify how prey resources affect the behavior of deep-diving whales
BENEFITS This project will result in an effective tool for measuring the prey field deep-diving teuthivorous whales that have posed significant problems for Navy sonars. The data collected as part of the Behavioral Response Study will describe the distribution of squid in the exposure area and the behavioral responses of whales both during controls and while under exposure conditions, making it possible to determine if prey conditions affect the observed behavioral responses. It is predicted that high squid availability in the exposure area could reduce the responsiveness of whales to even strong stimuli.
TRANSITION PLAN The data from this project are directly applicable to our understanding of the behavioral processes and biological habitat variables that affect sound exposure in marine mammals, an important problem for the operational Navy. Once we determine how characteristics of the habitat affect the behavior of deep-diving whales and if these behavioral responses can affect their exposure risk, we will determine which features need to be measured and at what resolution to predict behavior and if simpler proxy measures can provide adequate information for defining potential exposure risk characteristics that are important for mitigation measures.

1
TECHNICAL SECTION
SERDP RELEVANCE In the last decade, great progress has been made in understanding the behavior and biology of deep diving whales. Much of this progress has resulted from the development of new technologies such as tagging which were supported, in part, by various branches of the Department of Defense. While studies of the physical habitat of these whales have been able to keep pace with these advancements, understanding of the available prey, a key component in the biological habitat of these animals, has not. This lag has been driven by the difficulties in studying squid, the primary prey of deep-diving animals like sperm and beaked whales, due to the rapid speed, relatively large size, and depth of these prey animals. Recent advances in acoustic measurements now allow us to use this powerful remote sensing tool to assess squid behavior and distribution in water depths up to 600 m. However, teuthivores or cephalopod feeding whales, like sperm and beaked whales typically feed at depths of 1000 m. The development of a new remote sensing to carry the acoustic instruments needed to assess squid will bridge this gap, providing powerful information on squid to depths of 1200 m. Application of this tool will result in great progress in understanding whale behavior and habitat use and improvements in predictive capabilities of these factors. This advancement is essential for effective estimation and mitigation of noise effects, including those from military sonar systems, on these deep diving marine mammals.
TECHNICAL OBJECTIVE Our goal is to develop an effective, easily deployed, adaptable tool for measuring the prey field and sperm and beaked whales to depths of at least 1200 m and utilize this tool as part of the baseline behavioral studies to be conducted as part of the marine mammal sound-exposure experiments funded by the US Office of Naval Research and N45 to understand how prey affects the behavior of deep-diving whales and how this behavior may affect sound exposure risk. Specifically we propose to:
Modify and integrate a 38 and 120 kHz echosounder into an existing REMUS 600 UUV Develop on board acoustical data processing capabilities within the integrated echosounder
module Conduct initial testing of integrated system in a shallow (< 200m) coastal location Demonstrate capabilities in deep water off the US West Coast Deploy the Echosounder-UUV along with ship-based sampling in partnership with the marine
mammal Behavioral Response Study taking place in southern California in 2013 and 2014 to provide baseline information on squid prey resources and whales simultaneously in areas where the behavior and habitat use of individual deep-diving marine mammals is being measured in detail during normal conditions
Quantify how prey resources affect the behavior of deep-diving whales
TECHNICAL APPROACH BACKGROUND Sperm whales (Physeter macrocephalus) and beaked whales (spp. from the family Ziphiidae) are deep divers that feed on cephalopods (squid and octopus) (Best 1979, Santos et al. 2001) and regularly attain depths of over 1200 m with average foraging dive depths near 1000 m (Kawakami 1980, Tyack et al. 2006). While little is directly known, there is indication that these species (and particularly beaked whales) may be particularly sensitive to operational military sonars and other anthropogenic sound sources (Richardson et al. 1995, Frantzis 1998, Balcomb III & Claridge 2001). This may be because these animals use active acoustic signals that overlap in frequency spectra with some of the most powerful Navy operational signals in order to locate their prey (Johnson et al. 2004, Watwood et al. 2006), or because they may perceive these sonar signals as predator in nature (Tyack 2009). It also appears that the deep-diving behavior of these species may make them more susceptible to man-made noise.

2
Prey resources are likely to be a critical factor driving the distribution and behavior of whales and thus must be incorporated in any mitigation measures for the species. Estimating the distribution of highly mobile prey over the 1000-meter depth range of regular sperm and beaked whale dives, however, has proven a difficult task. As a result, little is known about the behavior, vertical and horizontal migrations, response to environmental forcing, and feeding ecology of squid or the responses of deep-diving teuthivores to these prey features. The acoustic characteristics of squid have recently been measured, creating a new, reliable technique for locating squid and quantifying their abundance in the field (Benoit-Bird et al. 2008). These same acoustic tools have also proven to be effective in detecting diving marine mammals, elucidating their foraging behavior and habitat use (Jochens et al. 2008, Benoit-Bird et al. 2009). However, these techniques are limited to approximately the upper 600 m of the water column when utilized from the surface using a standard research vessel. Our goal is to develop an effective, easily deployed, adaptable tool capable of measuring sperm and beaked whales and their prey field simultaneously to depths of 1200 m and utilize this tool as part of the marine mammal sound-exposure experiments funded by the US Office of Naval Research and N45.
METHODS Echosounders Recent work charactering squid with active acoustics has shown that squid can be identified and sized using two frequencies of split beam echosounders as long as one of the frequencies is 38 kHz and one frequency is at least 70 kHz (Figure 1, Benoit-Bird et al. 2008). This frequency response has been confirmed with a variety of squid species of various sizes (Lee et al. 2009, Benoit-Bird, unpublished data), allowing squid to be separated from other targets within the habitat, the primary goal here, as shown in Figure 2. The collection of direct samples of squid via nets and jigging will provide size classifications necessary to do more than separate squid from other targets and estimate their density from single target developments, facilitating further developments in target discrimination and classification for future work.
We have selected Simrad EK60 echosounders at 38 and 120 kHz as a balance between size, power consumption, effective range, and squid identification capabilities. Together, these instruments will be capable of detecting squid at a range of 400 m with the 38 kHz system having an even greater effective range of over 600 m. Given the REMUS platform’s effective diving depth of 600 m, this improves our current detection depth for squid from 600 m to over 1200 m, covering the typical dive depth of both sperm and beaked whales (Figure 3).
These echosounders have already been used in an autonomous mode in moorings (Demer, personal communication), proving the concept and shortening our development time for this aspect of the project. We will control the echosounders with a single board computer system capable of communication via ethernet and a wireless connection. The echosounder computers are typically controlled via ethernet, allowing us to easily interface with the single board computer. The wireless connection will allow instrument set up and control through the single board computer inside a sealed pressure housing prior to and following deployments, increasing our potential battery life by allowing the echosounders to remain turned off until just prior to deployment despite the need for physical set up of the instruments. The echosounders operate at 12 v at 50 W. The single board computer with ethernet operates at 5 v at 5 W.
Figure 1. The frequency response of scattering from individual squid is highly distinctive with very strong scattering evident at 38 kHz. Mean in situ measurements of target strength (●) collected between 23:45 and 00:00 local time on 23 March 2007. Fishing efforts during this same time period resulted in the capture of 20 squid with a mean length of 46.4 cm. Using regressions for target strength vs length from the controlled measurements, a predicted target strength for each frequency was calculated for this size squid (○). From Benoit-Bird et al. (2008).
3
Physical Integration of Sensors into REMUS 600 There are generally two classes of UUVs: gliders and propeller-driven UUVs. While glider systems have endurance, they are slow with significant restrictions on the sensor payloads. Propeller-driven systems, generally have the opposite characteristics with significantly reduced endurance, but are quick and have adequate power for sensors. The REMUS-600 begins to bridge this gap and offers range and endurance capabilities unlike other commercially available systems (>3 days; > 400km). This endurance reduces the time and space aliasing relative to other UUV systems presently in use and has potential to significantly impact regional scale processes. The basic design of the REMUS 600 is largely based on the successful REMUS 100 system (Moline et al. 2005). Cal Poly recently received a REMUS 600 supported by a DOD DURIP grant in 2008. The configuration is well and 38kHz. The REMUS-600 is designed as a series of hull sections that may be easily separated for maintenance, reconfiguration, or shipping. The vehicle sections, including the echosounders, mechanically mate using a common clamping ring assembly, which was derived from the well-proven MK-46 torpedo hull connection joint (Figure 4). Electrically, the vehicle has with two large battery
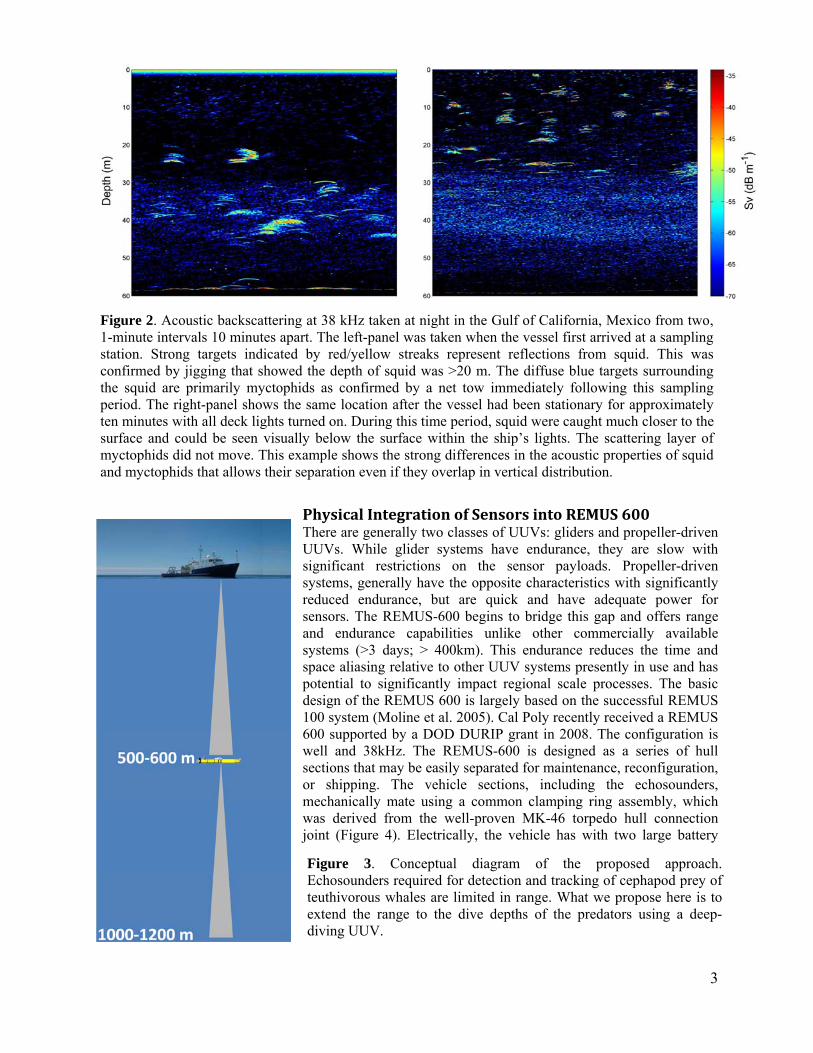
Figure 2. Acoustic backscattering at 38 kHz taken at night in the Gulf of California, Mexico from two, 1-minute intervals 10 minutes apart. The left-panel was taken when the vessel first arrived at a sampling station. Strong targets indicated by red/yellow streaks represent reflections from squid. This was confirmed by jigging that showed the depth of squid was >20 m. The diffuse blue targets surrounding the squid are primarily myctophids as confirmed by a net tow immediately following this sampling period. The right-panel shows the same location after the vessel had been stationary for approximately ten minutes with all deck lights turned on. During this time period, squid were caught much closer to the surface and could be seen visually below the surface within the ship’s lights. The scattering layer of myctophids did not move. This example shows the strong differences in the acoustic properties of squid and myctophids that allows their separation even if they overlap in vertical distribution.
Figure 3. Conceptual diagram of the proposed approach. Echosounders required for detection and tracking of cephapod prey of teuthivorous whales are limited in range. What we propose here is to extend the range to the dive depths of the predators using a deep-diving UUV.

4
sections for a total of 11.4 kW-Hrs of re-chargeable Lithium-Ion batteries, and is configured to hold a third battery pack. Although the power requirements of the echosounders are high, this battery capacity will still ensure mission durations of approximately 50 hrs at 3.0 knots. Power configurations of the vehicle are compatible with the echosounders requirements detailed above. The vehicle was specifically configured for oceanographic missions rather than bottom mapping. The vehicle will have 4 modes of communications; Iridium telemetry, acoustic modem with 4 km range, a distance ranger with 4 km range, and WiFi for surface communications in close proximity. The mission approach will be for the vehicle will follow a well documented approach (Moline et al. 2005, Moline et al. 2008) of scheduled surfacing for GPS to reduce position error. The vehicle will have a Neal Brown CT, which has performed well in recent missions (Figure X Sos.pdf) and two Wetlabs ECO triplets for measures of optical scattering and fluorescence (Chl a, CDOM, phycoerythrin, and dyes). These sensors are depth rated to the maximum vehicle depth of 600m and will help characterize additional parameters within this depth range (i.e. speed of sound, Figure 5).
The integration of the Echosounder with the UUV will be conducted in three phases. In the initial integration, the echosounder is proposed as a stand-alone unit, with only power and a leak/ground fault protection loop integrated with the vehicle (Figure 4). Data from the vehicle will be merged based on synchronized time clocks. This is the most straightforward approach to test power utilization, data quality, potential noise issues, and vehicle stability and control. The Echosounder UUV will be tested in this configuration in shallow water off California and the resulting mission and acoustic data analyzed before the next step in integration. The second step will be integration of the echosounder with the VIP and vehicle response to data queues, “smart sampling” whereby the vehicle changes from a standard survey to more intense efforts in response to the detection of squid targets by the echosounder. Called the RECON package, a separate CPU from the vehicle will interface with both the REMUS main computer for control and with the processed output from the echosounders to adaptively respond to individual/group targets (Figure 4). Again, this mode will be tested in shallow water with analysis of all mission and acoustic data before the vehicle is deployed in deep-water as part of the third phase of the project
Figure 4. Two configurations of the REMUS 600 proposed for this project. (upper) The smaller vehicle integrates the 120kHz and 38kHz echosounders along with the control and data processing electronics can in a wet module section. This configuration will be used for the initial shallow and deep water testing phases. (lower) The larger vehicle has an added module (see figure 6) to house the RECON package used for control feedback from the echosounders. This configuration will also be shallow and deep water tested and will be the configuration proposed for use in the Behavioral Response Study.

5
Shallow Water Field Tests Shallow water field tests of the integrated UUV platform are proposed for the Central Coast of California. Specifically, the integrated REMUS 600 will be launched and recovered from Cal Poly’s pier facility in San Luis Obispo Bay (Figure 6). This location affords a number of advantages for these preliminary tests including a calm location for launch and recovery (Figure 6), a gradual sloping bathymetry on a relatively broad shelf, proximity to Cal Poly, and an abundance of cephalopod targets east of the Santa Lucia Banks. In this location in the second year, the integrated platform will go through a series of performance tests which will assess vehicle flight characteristics, integrity of the power and leak detector cables, and the quality of the data with side-by-side measurements from a surface vessel. Care will be taken those there is no cross-talk between the surface vessel and the UUV. Drs. Benoit-Bird and Moline have conducted similar combined missions with successful outcomes (Benoit-Bird et al. 2010, Moline et al. 2010).These initial tests will be done near surface, with successively deeper and deeper runs. Given the distance offshore of deep waters of 1200m, these initial tests will be conducted on the east side of Santa Lucia Bank. The vehicle will be deployed and recovered from the Cal Poly pier facility with control by first wireless communication, second by acoustic communications, and finally but Iridium communications. During the initial runs, a zodiac will follow underwater activity with an acoustic ranger with modem, which will receive the real-time information on vehicle health and location. The shallow missions will then successively move further offshore to evaluate a larger range and set of conditions for the vehicle and data conditions for the echosounders. Figure 7 illustrates a number of these potential scenarios. Given the duration limitations of the vehicle, there will be trade-offs with respect to the area covered and/or the number of repeat visits in any particular mission. This effort is estimated at 1-2 weeks and approximately 10 missions. At the end of Year 1, an interim report will be filed and a go/no-go decision made based on the success of the shallow water testing. Criteria will be based on the ability to control the vehicles flight (e.g., can it accomplish the programmed mission?), control of the echosounder (e.g., does it turn on and off when it is supposed to) as well as if the quality of the echosounder data is sufficient for squid discrimination. Specifically, the echosounder must have a dynamic range of at least 70 dB, a signal/noise ratio greater than 10 dB at 100 m minimal electronic noise or interference, and a battery life of the vehicle and instrument of at least 30 hours.
Deep Water Field Tests After these initial tests off San Luis Obispo Bay, we propose bringing the vehicle to Monterey Bay, CA for deep water testing. Again, there are a number of advantages to Monterey for these advanced tests including the close proximity of deep water (in excess of 1200m), documented abundance of cephalopod targets, and logistic support from the Monterey Bay Aquarium Research Institution (both Drs. Benoit-Bird and Moline have a long history of collaborative efforts with MBARI). The REMUS 600 will be
Figure 5. An example depth and distance trace of speed of sound derived from pressure and CT measurements made from the Cal Poly REMUS 600 mission off San Luis Obispo Bay, CA in November, 2009. The mission demonstrates the endurance of the vehicle (only 15% of the battery power was used in this mission), level flight capability at 5, 10, 20, and 30 m, and the deep diving capability of the vehicle, here limited to 250m because water depth. Repeated surfacings were for GPS fixes during the mission.

6
Figure 7. Offshore location of the proposed shallow water field tests along the Central Coast of California. Depth in meters is shown moving offshore and illustrates the relatively broad shelf and gradual slope in this region, ideal for these initial tests. The two depth contours indicate the operational depth limit of the vehicle with the bottom in range and the depth limit of the proposed echsounders if the vehicle was navigating at its maximum depth limit of 600m. In white, originating from the Cal Poly pier facility (Figure 6), are three 200km mission plans for the shallow water experiment; (dotted) a grid survey pattern, (dashed) an offshore transect that would be repeated to target any daily changes in prey distribution, and (solid) a broad survey. Also included (yellow) is the REMUS 600 mission shown in the speed of sound Figure 5. Mission durations of 200km shown here would be expected to take on the order of 40 hours.
Figure 6. (top) Cal Poly’s pier facility in San Luis Obispo Bay, CA. The facility extends 1 km offshore and has been ideal for launching and recovering UUVs without the need of a boat. (below and left to right) Example deployment and recovery sequence of the REMUS 600 proposed for the shallow water testing. The PI readies the REMUS 600 for deployment using an attached crane. After lowering the vehicle in the water, detaching the load straps, and orienting the vehicle offshore, the operator controls the vehicle via wireless to a deployment point approximately 200m off the end of the pier. The vehicle is then sent the mission start command via wireless or an acoustic transponder, and dives for the mission. On the recovery, the reverse sequence occurs. The vehicle is within acoustic range within 4 km of the pier and therefore can home in on the position within wireless range to guide the vehicle to the lift point for extraction.

7
transported in an existing custom 8m trailer and launched out of either Moss Landing Harbor or Santa Cruz Harbor, both of which we have significant experience operating from. Tests will most likely occur along the northern edge of the canyon in the lee of large swell and wind waves. Here we will launch using two methods; the first from shore, towing the vehicle out with the zodiac, which we have done in San Luis Obispo Bay without operational difficulty. The second mode will be by a larger vessel, which is the normal mode of deployment of the REMUS 600, in preparation of participation in the Behavioral Response Study. Patterns of each mission will be similar to the shallow water tests, only deeper to the depth limit of the UUV. Implementation of Smart Sampling Implementing “smart sampling” is an important goal of this proposal, as we are assessing behavior of heterogeneously distributed targets. While under a predefined mission, the RECON software allows interruption of that mission. In this case, interruption will be based on the processed information from the echosounders. Squid and marine mammal targets can be detected using the array capabilities of split-beam transducers as individual targets whenever they are spaced further apart than a single sampling volume of the instrument, defined by an angle of 7⁰ by 10 cm. The intensity and frequency response of these individual detections can be rapidly determined by the native data collection software of the sonar. These individual echoes can also be connected to each other to describe the swimming path or track of an individual squid as shown in Figure 8 or whale as shown in Figure 12. The detection of a number of targets consistent with the intensity, frequency response, and path characteristics typical of squid and/or marine mammal targets will trigger changes in the mission of the REMUS. Even in extraordinarily dense aggregations, some squid near the edges of these schools are at densities low enough to be detected and classified using this approach (Figure 8, lower panel).The echosounder input into RECON will provide an estimated location of an area of interests. A number of finer resolution search scenarios that will be selected depending on the location of the targets of interest. These search patterns are efficient and derived from developed code for the REMUS to reacquire bottom targets. Examples include mow-the- lawn patterns and star patterns. Once a smaller grid search pattern has been completed, the vehicle will again start with a larger search pattern, and if targets of interest are found in sufficient density, acquire and then reduce the scope once again. This sequence of events will help ensure detailed examination of areas of high squid and whale abundance and will be critical for assessing the behavior of both predator and prey.
Figure 8. Echograms of squid in the Gulf of California, Mexico collected at 120 kHz for two, 1.5 min intervals on 23 March 2007. The seafloor depth was ~74 m. Top: Low squid density. Bottom: High squid density. From Benoit-Bird et al. (2008). In both cases, using split-beam transducers, individual squid can be observed swimming over a range of depths to create distinctive echo tracks.

8
After the completion of the deep-water testing and the implementation of smart sampling at the end of the second project year, an interim report will be filed and a go/no-go decision made before moving to the field experiment. In addition to meeting the same metrics used for go/no-go decision 1, the vehicle must also be capable of controlled flight to a depth of 600 m, the echosounder must have an effective range greater than 500 m, and the smart sampling should correctly identify squid more than 80% of the time with false alarms for squid in less than 15% of detections.
Field Deployment Partnership with SOCAL Marine Mammal Behavioral Response Study (BRS) At successful completion of the first three phases of this project, we will have an operational tool for the simultaneous assessment of squid and sperm and beaked whales. During the final stage of this project we will work in close coordination and partnership with a separate research program aimed at understanding the behavior of marine mammals both under natural conditions and in response to naval sonar signals off Southern California. The U.S. Navy (through the Chief of Naval Operations, Environmental Readiness division and the Office of Naval Research) is supporting a five-year, interdisciplinary behavioral response study (or BRS) in areas off southern California from 2010-2014; this study is notionally being referred to as SOCAL BRS, with the first phase this summer being SOCAL-10.
This study follows on related BRS efforts in the Bahamas and Mediterranean Sea to obtain direct empirical data on how marine mammals behave and vocalize in the absence and presence of different human sounds, including simulated tactical military sonar. While there have been some documented negative reactions of marine mammals to sounds associated with military training exercises in some conditions, there is essentially no direct evidence on the chain of events were leading to stranding or near-stranding events and little information on the natural behavior of these animals in the areas where training exercises occur. Likely, there is a behavioral component to these events whereby animals react in a way that places them indirectly at risk of stranding or injury, rather than the sounds directly injuring the animals. However, very few direct measurements of the natural behavior of deep-diving marine mammals area available and there have been no simultaneous studies of prey during behavioral studies. Our goal in this proposal is to provide ecological information on teuthivorous marine mammals that are being tagged as part of the baseline behavioral work being conducted as part of the BRS as well as predicting the impact of prey availability in mitigation measures. Integration of these two efforts will be facilitated by PI Brandon Southall, Chief Scientist for the BRS study. During the BRS study, acoustic archival tags will be attached to free-ranging marine mammals, including both odontocete and mysticete cetaceans and (by 2011) pinnipeds as well. These tags (several types will be used) will record diving behavior using 3-D accelerometers, as well as sounds produced and received by tagged animals. By obtaining these measurements before, during, and after controlled sound exposures, baseline behavior and how it changes during and following controlled sound exposures can be measured.
With these data, including information such as the production of orienting echolocation clicks and concentrated buzzes associated with prey capture attempts, the tags provide information on the areas animals are exploiting and some proxies for foraging as shown in Figure 9. However, they do not provide any direct information regarding the distribution and/or behavior of marine mammal prey items on which subjects are presumably feeding. The Echosounder-REMUS will be deployed in conjunction with the ongoing studies of beaked whales carrying these tags. Currently, BRS efforts are aimed describing the diving behavior of the whales, their use of echolocation, and their behavior following exposure to various sounds. The addition of the Echosounder-REMUS will provide information on the distribution and patchiness of squid, their behavior, and the size of squid available for whales. For example, we anticipate being able to measure the horizontal and vertical habitat use of squid around foraging whales as shown in Figures 10 and 11. Combining the focal studies of whales under natural conditions with studies of squid distributions at the same time and geographical area will allow measurement of the importance of prey in driving whale habitat use, the potential foraging selectivity of beaked whales, the behavior of squid in response to whale predation, and, if other goals are successfully met, the acoustic exposure whales will tolerate as a function of food resources being targeted.

9
The deployment of the Echosounder-REMUS during the Behavioral Response Study will be part of a comprehensive sampling plan to describe the habitat and behavior of deep-diving whales. In addition to the UUV which will sample the physical habitat with onboard CTD and optics and the distribution of squid at depths from 600-1200 m, ship-based sampling will provide additional information on squid in shallower water (Figure 3), provide calibration information for the acoustic sampling, help characterize the physical habitat, and provide population level sub-surface surveys of marine mammal species. To provide further details on the physical habitat, CTD profiles with optical sensors for phytoplankton will be carried out at regular intervals. To calibrate the acoustic estimates of squid biomass, trawls with a 25m2 opening net towed at speeds of up to 8 knots at depths of up to 1000 m will be used to sample acoustically identified features. This net has been shown to be effective at capturing squid up to 70 cm in length (Seibel, unpublished data). Squid captured in net tows will be identified to species, measured, and preserved for additional analysis. A four-frequency echosounder system that overlaps with the two
Figure 9. From Johnson et al. (2004). Echolocation of prey by a tagged Mesoplodon densirostris. (a) Alignment of successive clicks made by the tagged whale at the appropriate time on the x-axis. The y-axis indicates the time elapsed between the outgoing click and the returning echo expressed as distance to the target assuming a sound speed of 1500 m s_1. The colour scale indicates the energy of the signal from blue indicating intense to yellow indicating faint. (b) The envelope of the recorded signal on the logarithmic scale from which (a) was calculated. The high-level clicks produced before -4 s are regular clicks. The clicks in the buzz from -3.4 to 0 s are so rapid that they appear continuous in (b). (c) The magnitude of the dynamic acceleration of the tagged whale. The peak at the end of the buzz probably indicates movements associated with prey capture.

10
frequencies used on the UUV will be deployed from the ship to provide information on the distribution of squid from the surface to 600 m. In addition, this system as well as the echosounders on the UUV will provide additional information on diving whales. Previous work has shown that marine mammals are strong sonar targets (Edwards & Livingstone 1960, Au 1996) and that echosounders are an effective tool to studying the depth behavior of these animals as well as their overlap with their prey (Benoit-Bird & Au 2003, Jochens et al. 2008, Benoit-Bird et al. 2009). An example of the kind of information that an echosounder survey can provide on deep-diving marine mammals, in this case a sperm whale, and squid simultaneously is shown in Figure 12. This approach complements that of tagging. Instead of providing detailed behavior on an individual animal, it provides synoptic predator-prey information on relatively large scales with high sample sizes (Jochens et al. 2008). Echosounder survey data will also be used to identify areas of high use by marine mammals as well as dense squid aggregations that will be communicated to the BRS study team to facilitate tagging efforts.
Figure 10. Squid density as a function of location during two repeated surveys near the squid fishing port of Santa Rosalia, Mexico showing temporal variation in the horizontal distribution of squid. A. Survey in early evening. B. Survey several hours later after dark. Survey tracts are indicated by solid gray lines.
Figure 11. The vertical distribution of squid as a function of time of day. These data summarize tens of thousands of squid detections collected over a one month period and clearly show the vertical migration behavior of jumbo squid in the Gulf of California.

11
Data Integration Data from the ship and UUV will be combined (Figure 3) to provide information on the distribution and behavior of squid and population level habitat use and behavior of marine mammals with full coverage of the depth range of most deep-diving cetaceans. We will verify squid species and sizes with net tows and collect supplementary data on the physical and biological habitat will using both the UUV and ship-based instruments. Numerous measurements of the speed of sound in the area will supplement efforts to estimate sound propagation during the study period. This combined approach will provide information on the ecological processes driving the behavior of teuthivorous marine mammals under both natural conditions. It will also allow us to take a larger view of habitat utilization and the ecological processes driving marine mammal behavior than is possible through tagging efforts which necessarily focus on a limited portion of the population. We will examine the relative importance of squid density, depth, aggregation scales, and behavior along with environmental variability to habitat use as a function of horizontal space, vertical space, and time of day by teuthivorous marine mammals on and around the Southern California Navy Range (SCORE). This will permit improved prediction of whale abundances within the area and an understanding of what conditions may lead to specific behaviors may be found to place diving marine mammals at risk of exposure to sound sources and at risk of negative outcomes to these exposures.
Figure 12. Echogram (38 kHz) of a 10 min period in an area where sperm whales were visually spotted in the Gulf of California. The echosounder data captures features of the mid-water ecosystem as well as real-time interactions between sperm whales and squid in relation to scattering layers that serve as prey for the squid.

12
Collaboration with investigators in the BRS, facilitated by PI Southall will allow us to look at individual level foraging of tagged marine mammals in the context of prey availability, distribution, and behavior. The location and depth of individually tagged whales will be compared to the horizontal and vertical distribution of squid in the same area as well as measures of the physical and biological habitat. We will combine our measurements of target strength of squid in the habitat with measurements of backscatter from whale echolocation clicks recorded on the tags. By comparing the target strength distribution measured in the area of the whale with the distribution measured on the whale, we will examine prey selectivity by foraging whales. This approach of examining individual behaviors of tagged whales in relation to different prey conditions will permit mechanisms of interactions between teuthivorous predators and their prey to be examined. As there is likely a behavioral component to marine mammal stranding events following sound exposure rather direct injury from the sounds, an understanding of the factors driving the behavior of these animals is critical to the interpretation of controlled exposure studies as well as the prediction of conditions that could lead to future stranding events. Synergies with BRS The BRS studies are seeking to measure natural behavior as well as changes to behavior in response to anthropoenic sound, which are clearly driven for foraging animals by the presence and characteristics of their prey and thus the BRS data on baseline diving would be significantly enhanced with detailed characterizations of prey distribution and density in similar areas and times. We will use great care to avoid impacting the BRS results by the intentional introduction of active acoustics for purposes of measuring prey fields by carefully coordinating our efforts and working in nearby areas on other groups of individuals and by conducting prey mapping studies either on nearby foraging marine mammal groups on focal BRS groups just after those data were collected. Each program will benefit from this partnership. BRS will have the significant benefit of having in situ measures of prey distribution and density.. Efforts to characterize prey fields will benefit from BRS studies in terms of knowing where marine mammal predators are feeding and how they are exploiting the prey patches being measured. SOCAL BRS and squid-mapping efforts will be carefully designed and communicated to maximize the benefits of partnerships, while minimizing potential conflicts for either project. The efforts will be operated from entirely different platforms, and thus will not have any possible on-water conflicts associated with ship resources or personnel time. The prey mapping team will be clearly aware of the schedules and objectives of BRS efforts through the partnership with Dr. Southall and protocols will be developed to ensure sufficient stand-off ranges from tagged marine mammals being used in controlled exposure studies and active acoustic prey characterizations. On-water efforts will be thus coordinated to occur in similar time/space to maximize the extent to which each data set informs the other, but with sufficient time/space separation to avoid complicating/contaminating the BRS results with prey mapping active acoustics or contamination of baseline behavioral studies conducted as part of this work with anthropogenic sound. If all objectives of this work are completed, the option to include active acoustic studies of whales and their prey in a controlled exposure context with tagged marine mammals to in the final year of the project would be clearly discussed and communicated with members of both teams, as well as all research sponsors.
MILESTONES
This project is proposed for four years with the development and testing of the integrated system in the first 2 years and full integration into the planned SOCAL Marine Mammal Behavioral Response Study in the 3rd and 4th years. A timeline with important milestones is shown.

13
Activity/Milestone MJ J A S O N D J F MA MJ J A S O N D J F MA MJ J A S O N D J F MA MJ J A S O N D J F MA
Purchase instrumentation
Final acoustic design
Integrate acoustics & vehicles
Shallow water field tests
'Smart sampling'
Deep‐water test
Analyze field test results
Go/No‐Go decision/interim report
Vessel contracting
Acquire field supplies
Field studies
Analysis of field data
Integration of data
Presentation of results
Publication in scientific literature
2011 2012 2013 2014 2015
Year 1 Year 2 Year 3 Year 4
Outcomes and Deliverables In addition to interim reports at the go/no-go decision points at the end of years 1 and 2 and a final report, this project will result in an effective tool for measuring the prey field deep-diving teuthivorous whales that have posed significant problems for Navy sonars. The data collected in the context of the baseline behavior as part of the BRS study will describe the distribution of squid in the SCORE range and the behavioral responses of whales during controls, making it possible to determine how prey conditions affect the observed behavior. It is predicted that high squid availability in the exposure area could reduce the responsiveness of whales to even strong stimuli. These data along with the technical details of the new instrument and platform will result in presentations at scientific meetings and a number of peer-reviewed publications.
RESEARCH TEAM Dr. Kelly Benoit-Bird, Oregon State University, is an expert in bio-acoustical oceanography whose research focuses on the ecology of predator-prey interactions. She has led a number of large, interdisciplinary research programs with total budgets of over $9 million (over $4 million directly to Oregon State), resulting in more than 30 peer-reviewed publications. She has received numerous awards including the PECASE, Young Investigator Award (ONR), the American Geophysical Union’s Ocean Sciences Early Career Award, the Acoustical Society of America’s R. Bruce Lindsay Award for her work in marine ecological acoustics. Dr. Benoit-Bird has developed several new, high-frequency sonars for the study of biological processes. She has conducted controlled acoustic backscatter measurements on live squid and is utilizing acoustic approaches to study the behavior and foraging ecology of squid as part of an NSF funded effort in the Gulf of California and has studied the foraging behavior and ecology of a number of marine mammal species including spinner and dusky dolphins, fur seals, and sperm whales. She will coordinate this project’s efforts, develop the acoustic instrument, work with Dr. Mark Moline to integrate the instrument into the autonomous underwater vehicle, and will analyze the acoustic data. To facilitate these efforts, Dr. Benoit-Bird requests support for 3 person months in each year. To support these efforts, support for 5 person months per year of effort is requested for technician Chad Waluk. Mr. Waluk has been instrumental in the development and construction of a multi-frequency zooplankton sonar integrated into a Remotely Operated Vehicle as well as the at-sea deployment and data analysis from this new instrument. He will bring a range of valuable skills to the project and will assist in all phases of development and data collection proposed here.

14
Dr. Mark Moline serves as the Director of the Center for Coastal Marine Sciences at California Polytechnic University. His expertise is in biological oceanography with an emphasis on the interplay between physics and planktonic communities. For the past 8 years, he has developed an expertise in operating and adapting underwater vehicles (UUVs) with new sensor suites to quantify food web interactions, scales in aquatic ecosystems, ecosystem dynamics, and basic physical forcing. He owns and operates 3 UUVs, including the REMUS 600 identified for this study, and has almost 800 hrs of underwater time with these systems for a distance of ~5,000 km. He has over 60 peer-reviewed publications, received grants in excess of $15 million, and numerous of awards including the PECASE, YIP (ONR), and NIP (NASA).He will be responsible for integrating the acoustic sensors provided by Dr. Kelly Benoit-Bird into the REMUS 600.He will also conduct the underwater missions of this project, including the shallow water tests, deep water tests and the missions as part of the Behavioral Response Study. To provide the time for these efforts, Dr. Moline requests 2 months of time each year. Two months of time are also requested for Cal Poly technician Ian Robbins for assistance in the sensor integration and field efforts. Mr. Robbins has been working with the autonomous vehicles for 5 years and is fully versed in their operations. Dr. Brandon Southall, Southall Environmental Associates, served as the Director of NOAA's Ocean Acoustics Program until last year. He is an expert on acoustics and marine mammals and was instrumental in the development of acoustic exposure criteria for marine mammals. Currently, Dr. Southall is serving as the Chief Scientist of the ONR and N45 funded Southern California marine mammal Behavioral Response Study. As part of the proposed effort, Dr. Southall will coordinate collaborations between our research team and the tem involved in the Behavioral Response Study. Our efforts require successful integration of the squid measurements we propose to make with the studies of marine mammals being carried out by the BRS team, including active coordination while at sea. Dr. Southall will provide this critical link. Support for his inclusion in this effort is requested for 200 hours in each of the first two years of the project and 320 hours in the last two years to participate in project planning, field efforts, and data synthesis.
COOPERATIVE DEVELOPMENT This project will significantly benefit from and leverage the ongoing ONR/N45 funded multi-million dollar Marine Mammal Behavioral Response Study in southern California to effectively reduce investment while achieving the proposal’s goals and simultaneously adding an important data set to the SoCal BRS program. In addition to the direct benefit to this project of integration in the BRS, it is also important to highlight the leveraging of the existing UUV platform. There has been a significant investment made by ONR in the development and acquisition of UUV platforms, including the REMUS 600 in this proposed work. The integration of UUVs into Navy missions to expand capabilities is a stated goal of the Navy (OPNAV N77 2004) Here, there is an opportunity to use this investment to expand the DOD-relevant capabilities of the platform.
TRANSITION PLAN The work proposed here is a novel approach to extending the range of multi-frequency sonar. There are three general areas of activity that will be implemented in this program that have the potential for transition into further research and development. This will be the first time to integrate multi-frequency echosounders on a UUV. Lessons learned from this approach will be applicable to many ongoing investigations into whale behavior, interactions with prey, and the influence of human sounds. The proposed real time processing of acoustic signals and use in UUV mission adaptability will be novel and has significant potential for transition. The addition of the hydrophone on the UUV will also provide new information on ambient (environmental/human) sounds. Current research is examining UUV-UUV communication and response. The ability to respond in real time to small external acoustic targets (whales and squid) and the approaches for maintaining contact with those targets would be directly applicable to

15
ISR, ASW, MCM, TCS and NSW. The data from this project will be directly applicable to our understanding of the behavioral processes and biological habitat variables that affect sound exposure in marine mammals. Once we determine how characteristics of the habitat affect the behavior of deep-diving whales and if these behavioral responses can affect their exposure risk, we will determine which features need to be measured and at what resolution to predict behavior and if simpler proxy measures can provide adequate information for defining potential exposure risk characteristics that are important for mitigation measures. We will work with SERDP to provide these details in the best format for use by the US Navy.