a survey of socially interactive robots - rugfeldbrug/cogrobot/a survey of socially...
TRANSCRIPT

A SURVEY OF SOCIALLY INTERACTIVE
ROBOTS
Terrence Fong, Illah Nourbakhsh, Terrence Fong, Illah Nourbakhsh,
Kerstin Dautenhahn
Presented By:
Mehwish Alam
INTRODUCTION

� History of Social Robots
� Social Robots
� Socially Interactive Robots
� Why Socially Interactive Robots?

HISTORY OF SOCIAL ROBOTS
� task performance
through collective
actions
� Individual Society
(birds, human etc.)
� Individual matters
Group Oriented Social Robots
Individual Social Robots
� Insect Society
Inspiration
� Individual do not matter
� Examples: Ant- like
robot, distributed
robotic group etc.
� Individuals live in group
� form relationship and
social networks
� Take into account social
norms and conventions

SOCIAL ROBOTS
� Definition:
� Recognize each other
� Engage in social interaction
� Posses history (interpret world from their own
experience)
AIBO AIBO –– Robot Robot –– Robot InteractionRobot Interaction
experience)
� Communicate and learn from each other
� Possible Interactions:
� Robot – robot Interaction
� Robot – human Interaction
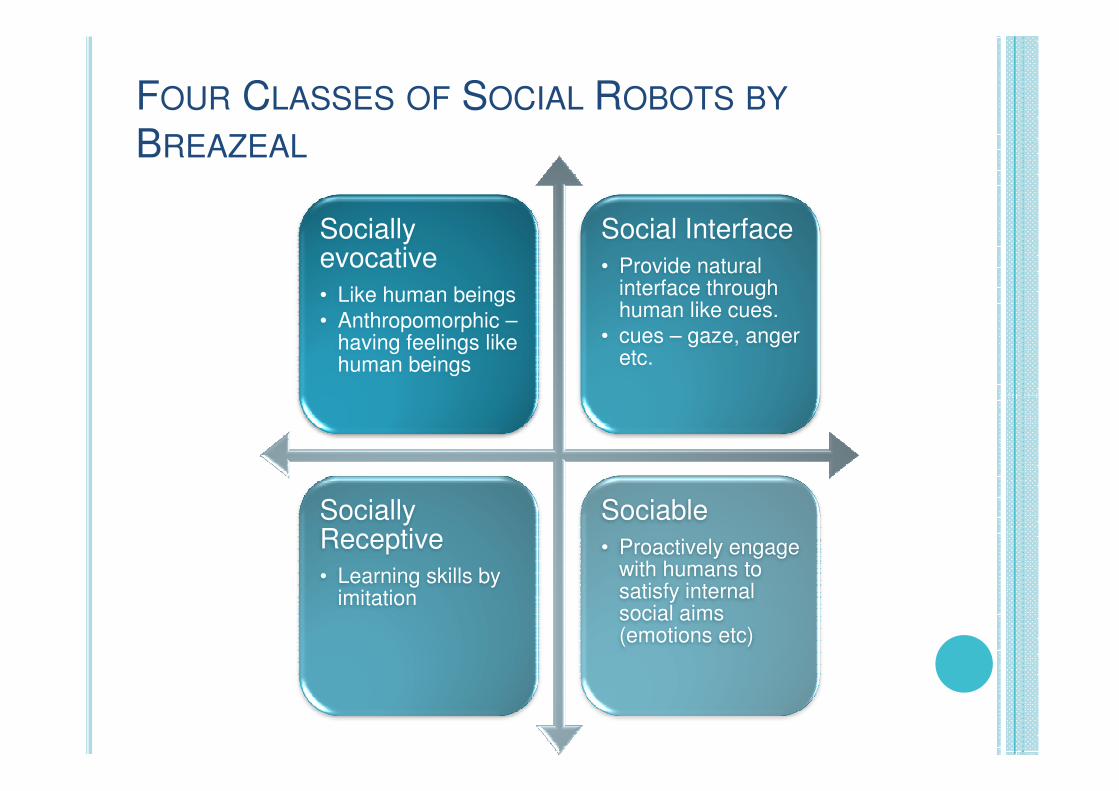
FOUR CLASSES OF SOCIAL ROBOTS BY
BREAZEAL
Socially evocative
• Like human beings
• Anthropomorphic –having feelings like human beings
Social Interface
• Provide natural interface through human like cues.
• cues – gaze, anger etc.
Socially Receptive
• Learning skills by imitation
Sociable
• Proactively engage with humans to satisfy internal social aims (emotions etc)
SOCIAL ROBOTS (CONT..)
� Three added classes
� Socially situated
� Distinguish between other social agents and other objects in
environment
� Socially Embedded
� Structurally Coupled with social environment
� Partially aware of human interactional structure
� Socially Intelligent
� Aspects of human style social intelligence
R2R2--D2 and CD2 and C--3PO from Star Wars3PO from Star Wars

SOCIALLY INTERACTIVE ROBOTS
� Peer-to-peer Human-Robot Interaction (not like
teleoperation)
� “Human Social” characteristics in robots:
� Express and perceive emotion
� Communicate with high level dialogue� Communicate with high level dialogue
� Establish/maintain social relationships
� Use natural cues (gaze, gestures etc.)
� Purposes of socially interactive robots:
� Pets, assistants, educational tools.

WHY SOCIALLY INTERACTIVE ROBOTS?
� Solving specific tasks
� Socially interact with people
� To change the behavior, feelings or
attribute of humans (autism therapy)
Robot as “Avatar” – robot functions � Robot as “Avatar” – robot functions
as representative for human.
Serving Robot Seoul Serving Robot Seoul ObiquitousObiquitous
RoombaRoomba –– vacuum cleanervacuum cleaner
XboxXbox--NXENXE--AvatarAvatar

METHODOLOGY
METHDOLOGY
� Design Approaches
� Design Issues
� Embodiment
� Emotion
� Dialogue
� Personality
1. DESIGN APPROACHES
Design
Anthropomorphic
Zoomorphic
Human Social Expectation
Functionality
Faces, Speech Recognition, Lip reading
Expectation
Enjoyable, feeling empowered, competent

DESIGN APPROACHES (CONT..)
(a) Biologically Inspired
� Create robots that mimic the social behaviour and
intelligence found in living creatures
� Theories
� Ethology� Ethology
� Structure of Interaction
� Theory of Mind
� Developmental Psychology

DESIGN APPROACHES (CONT..)
� Ethology
� Observational study of animals in
natural setting
� Play, comfort seeking etc.
� Structure of Social Interaction� Structure of Social Interaction
� Analysis of interactional structure
� Focus:
� Design of perception
� Cognition Systems by identifying key interaction patterns
DESIGN APPROACHES (CONT..)
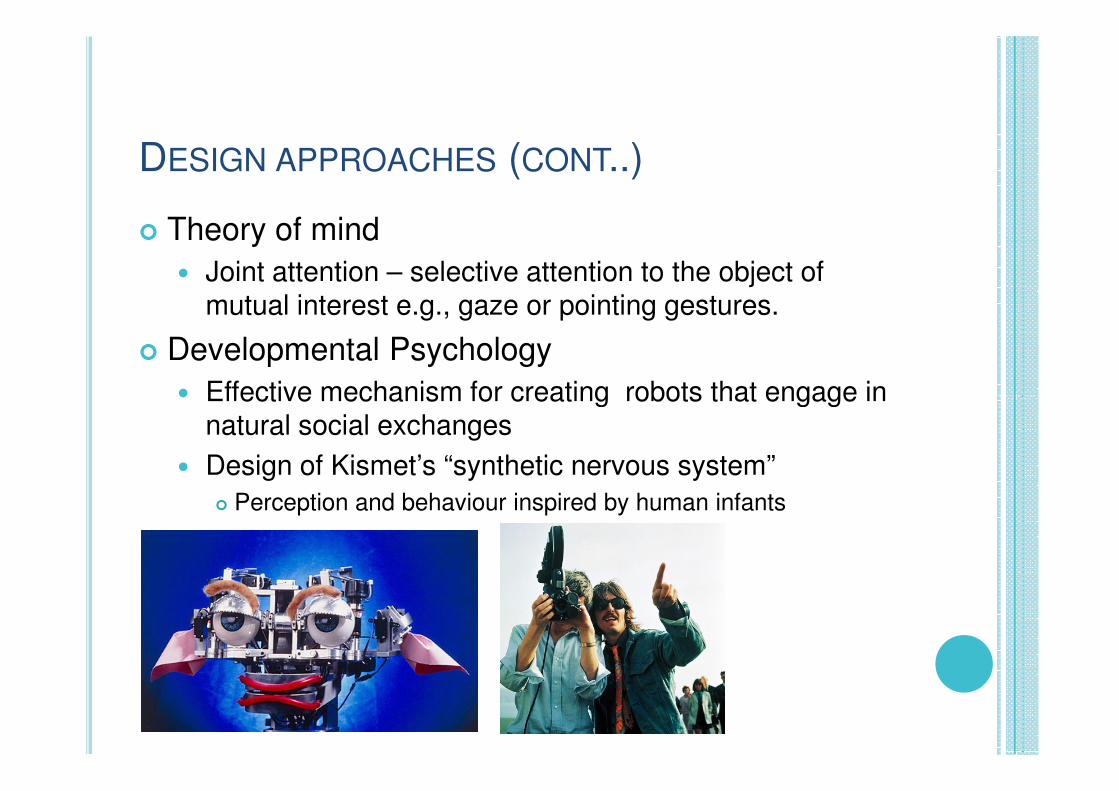
� Theory of mind
� Joint attention – selective attention to the object of
mutual interest e.g., gaze or pointing gestures.
� Developmental Psychology
� Effective mechanism for creating robots that engage in � Effective mechanism for creating robots that engage in
natural social exchanges
� Design of Kismet’s “synthetic nervous system”
� Perception and behaviour inspired by human infants

DESIGN APPROACHES (CONT..)
(b) Functionally Inspired
� To create the impression of an artificial social agent
driven by beliefs and desires, we do not necessarily
need to understand how the mind really works.
� Techniques:� Techniques:
� Human Computer Interaction (HCI)
� System Engineering
� Iterative Design
DESIGN APPROACHES (CONT..)
� Human Computer Interaction
� Robots are being developed using HCI
� Cognitive Modelling, heuristic evaluation, empirical user
testing
� System Engineering� System Engineering
� Development of functional requirements
� Iterative Design
� The process of revising a design through a series of test
and redesign cycles.

2. DESIGN ISSUES
� Design Problems:
� Cognition – Planning and Decision making
� Perception – navigation and environment sensing
� Action – mobility and manipulation
� Human robot interaction – user interface, input devices, � Human robot interaction – user interface, input devices,
feedback display
� Architecture – control electromechanical system
DESIGN ISSUES -
SOCIAL INTERACTION ISSUES
� Human Oriented Perception
� Detecting and organizing gestures
� Monitoring and classifying activity
� Natural HRI
� Believable behavior � Believable behavior
� Keep up with social norms
DESIGN ISSUES -
SOCIAL INTERACTION ISSUES
� Readable Social Cues
� Useful for expression and easy interaction
� Social cues should be easy to understand
� Expression, gestures or voice could be adopted
� Real Time Performance� Real Time Performance
� Should operate at human interaction rate

3. EMBODIMENT
� The more the robot perturbs the environment and
be perturbed by it, the more it is embodied. (AIBO
vs KHEPERA)
� Morphology
� Anthropomorphic� Anthropomorphic
� Zoomorphic
� Functional

EMBODIMENT (CONT..)
� Morphology
� Form and expectations are important because it
establishes social expectations
� Forexample: dog like robot would be treated differently.
� Anthropomorphic� Anthropomorphic
� It is the tendency to attribute human characteristics to
objects.
� Zoomorphic
� Toy robots designed to imitate living creatures.
� Functionality� Embodiment should reflect the task to be performed
� Health care robots will have handles and carriage space

AnthorpomorphicAnthorpomorphic
Design Tells functionalityDesign Tells functionality
AnthorpomorphicAnthorpomorphic
RoboScienceRoboScience RoboDogRoboDog

EMBODIMENT – DESIGN CONSIDERATIONS
(CONT..)
UNCANNY VALLEY
� People are heading towards designing human like
robots.
� Failure to achieve the target, increases dislikeness
among the people for the robot

4. EMOTION
� Artificial Emotion
� Emotions as Control Mechanism
� Speech
� Facial Expression
� Body Language
5. DIALOGUE
� What is a dialogue?
� Sharing of information with other party
� Types of dialogue:
� Low level
� Robot learn simple words – name of objects, body parts, � Robot learn simple words – name of objects, body parts,
behaviours
� Non verbal
� Body positioning, gesturing, physical action
� Natural Language
� High level dialogue
� Nowadays limited query response

6. PERSONALITY
� What is personality?
� Set of distinctive qualities that distinguish individuals.
� Personality in Social Robots
� Tool like
� Pet� Pet
� Cartoon
� Artificial Being
� Human Like
CONCLUSION
� In near future the robots could be sent to the space
for achieving different tasks.
� It is not necessary to build robots for specific task,
rather they must also be able to interact with human
beings.beings.
� They must be able to understand the cues and
feelings of human beings not just do there own
work.
THANK YOU
ANY QUESTIONS ?