a single-camera method for three-dimensional video imaging
TRANSCRIPT

A single-camera method for three-dimensional video imaging
J. Eian a,b,*, R.E. Poppele a
a Department of Neuroscience, 321 Church Street, SE, University of Minnesota, Minneapolis, MN 55455, USAb Graduate Program in Biomedical Engineering, University of Minnesota, Minneapolis, MN 55455, USA
Received 22 March 2001; received in revised form 27 June 2002; accepted 28 June 2002
Abstract
We describe a novel method for recovering the three-dimensional (3D) point geometry of an object from images acquired with a
single-camera. Typically, multiple cameras are used to record 3D geometry. Occasionally, however, there is a need to record 3D
geometry when the use of multiple cameras is either too costly or impractical. The algorithm described here uses single-camera
images and requires in addition that each marker on the object be linked to at least one other marker by a known distance. The
linkage distances are used to recover information about the third dimension that would otherwise be lost in single-camera two-
dimensional images. The utilities of the method are its low-cost, simplicity, and ease of calibration and implementation. We were
able to estimate 3D distances and positions as accurately as with a commercially available multi-camera 3D system. This method
may be useful in pilot studies to determine whether 3D imaging systems are required, or, it can serve as a low-cost alternative to
multi-camera systems. # 2002 Elsevier Science B.V. All rights reserved.
Keywords: Reconstruction; Three-dimension; Video; Kinematics; Biomechanics; Gait
1. Introduction
Video imaging is often used to record the three-
dimensional (3D) geometry of objects in space. A
number of different methods exist, and most make use
of images acquired with multiple cameras (see Shapiro,
1980 for a review). The direct linear transformation
method (Abdel-Aziz and Karara, 1971) is a widely used
technique because it is accurate and relatively simple to
implement (Yu et al., 1993). It requires images from at
least two cameras for 3D reconstruction.
Occasionally, however, the use of multiple cameras is
either impractical or too costly. A number of single-
camera methods exist, but most record just two-dimen-
sional (2D) geometry (Smith and Fewster, 1995). Only a
handful of single-camera methods for 3D data collection
have been described, and each imposes the need for
something in addition to the camera images. Berstein
(1930) (see also Shapiro, 1980) described a single-camera
3D application that used a mirror to provide a second
view of the object so multi-image techniques could be
applied to a single split image. Positioning the mirror is
an evident drawback of this approach.
Miller et al. (1980) described another single-camera
3D method that does not require multiple views of the
object. It is an extension of a multi-camera 3D
cinematographic method that applies to objects coupled
by joints with known characteristics; knowledge of the
joint characteristics allows 3D information to be ex-
tracted from 2D images. We propose here a somewhat
similar single-camera 3D approach that also makes use
of specific knowledge about object geometry.
Indeed, it is impossible to determine the 3D position
of a lone marker in space from 2D images acquired with
one stationary camera, and the method proposed here
cannot be used for such a task. It can, however, be used
to determine the positions of multiple markers in space
when each marker is linked to at least one other marker
by a known distance. The linkage distances are used to
recover information about the third dimension that
would otherwise be acquired with a second camera.
Numerous objects possess the geometry required for this
approach; for example, joint markers on a limb suffice
because the lengths of the bones that span the joints
provide the required linkage distances.
* Corresponding author. Tel.: �/1-612-625-4412; fax: �/1-612-626-
5009
E-mail address: [email protected] (J. Eian).
Journal of Neuroscience Methods 120 (2002) 65�/83
www.elsevier.com/locate/jneumeth
0165-0270/02/$ - see front matter # 2002 Elsevier Science B.V. All rights reserved.
PII: S 0 1 6 5 - 0 2 7 0 ( 0 2 ) 0 0 1 9 1 - 7

The utility of the method is its relative simplicity and
low-cost. The only required equipment is one camera
and a system capable of locating image points in a 2D
plane. No measurements of camera position or orienta-tion are needed, and the required calibration is simple: it
amounts to recording still images of a marker grid
moved incrementally through the depth of the object
workspace.
Reconstruction accuracy depends primarily on the
care taken in performing the calibration and the
accuracy of the imaging system. In the study described
here we were able to estimate 3D lengths and positionsas accurately as with a commercially available multi-
camera 3D system*/with a marked reduction in system
complexity and cost. This method seems well suited for
pilot studies to determine whether a standard single-
camera 2D system or a more expensive multi-camera 3D
system is needed. It may also serve as a simple low-cost
alternative when the imaged objects meet the linkage
requirement.
2. Theoretical overview
2.1. Example
In order to see how distance information can be used
to reconstruct 3D geometry from a single 2D image, we
begin by discussing a two-point example. Consider apoint O arbitrarily positioned in space, and a second
point, P , linked to O by a known distance, D. We can
determine the position of P relative to O using D and an
image of this geometry. The image contains two points,
call them o and p , generated by O and P , respectively
(Fig. 1). The location of p in the image specifies the
camera line of sight that must contain P . The problem
of locating P in 3D space amounts to determining whereP lies along this line of sight. We can narrow this down
to two possible positions by visualizing a spherical shell
with radius D centered O . The shell represents all
possible positions of P relative to O . The line of sight
specified by p can intersect this shell at most twice (P1
and P2), and these two intersections are the only
possible positions of P relative to O given the image
data. We can remove the final ambiguity by consideringeither known characteristics of the geometry (for
example, of an object represented by the points), or,
more generally, a third point linked to P . In the latter
case, the distance from P to the third point will usually
be satisfied by only one of positions P1 and P2 (we
explain this further below and the appendices).
We have devised a tractable mathematical algorithm
to determine 3D information in a manner analogous tothis example. The algorithm requires a calibration that
allows us to assign a camera line of sight to each
location in the image. Each line of sight is the ray that
contains all points in space that appear at a particular
location in the image. The use of rays allows us to
express all three unknown coordinates of an image
producing point in terms of a single unknown coordi-
nate. The specification is provided by equations derived
from the calibration.
The way we use this coordinate reducing property of
the rays in the algorithm can be illustrated with our
example. Analogous to the shell about O , we use a 3D
Euclidean distance formula to express the distance
between O and P in terms of their three unknown
coordinates. Next we turn to the image. It contains
points o and p , and their locations specify rays that
contain points O and P , respectively. Using equations
that model these rays, we express all three unknown
coordinates of O and P in terms of one unknown
coordinate for each point. By substituting these equa-
tions into the distance formula we reduce it to an
equation with only two unknowns: one coordinate for O
and one coordinate for P . If we know the coordinate for
one point, O for example, we can solve for the
coordinate of the other.
Thus the algorithm requires, in addition to the known
distances between markers, one spatial coordinate of a
seeding marker. We can work iteratively and determine
the 3D positions of all the markers linked to the seeding
marker through chains of known distances. There are at
least two ways to determine a coordinate for a seeding
marker. The first is to know one coordinate of a marker
beforehand. For example, we moved objects with a
robot, so from knowledge of the robot path we knew a
Fig. 1. Algorithm geometry: Given two points in space, O and P , and
the distance between them, D, all possible positions of P relative to O
are represented by an invisible spherical shell centered at O with radius
D. A focused image of the points eliminates all but two possible
positions for P . The image contains two points, o and p , generated by
O and P , respectively. Point p in the image specifies the line of sight
that must contain P in space, and this line of sight can intersect the
shell about O at no more than two points, P1 and P2. These are the
only possible positions of P relative to O given the image. This is the
basis of the reconstruction algorithm. We develop a mathematical
model of this geometry in the text.
J. Eian, R.E. Poppele / Journal of Neuroscience Methods 120 (2002) 65�/8366

coordinate for a marker affixed to the robot. Given the
known coordinate, the equations for the ray that
contains the marker specify the other two coordinates.
There is also a second way that can be used if nocoordinate of any marker is known. It requires a triangle
of distances between three markers and an image of the
markers. We describe it in Appendix C.
2.2. Preliminary description and definitions
Here we define the terminology used in the mathe-
matical derivations that follow. We call what we are
imaging the object or subject . We select a finite set ofpoints on the object to describe its geometry, and we call
these points markers . When the distance between two
markers on the object is known we say the markers are
linked . We use markers and their images to represent the
geometry of the object in three domains (to be defined):
3D space, the 2D image plane, and the 2D video frame.
3D space , or simply space , is the field of view of the
camera. We assume that the object is always in 3Dspace. We allow any three orthogonal directions, X , Y ,
and Z , to be selected as a basis for 3D space, but in the
descriptions that follow we assumed X�horizontal,
Y�vertical, and Z�depth, where in this case � means
‘is most nearly parallel to’ and depth is along the optical
axis of the camera. The units of length in space are (cm).
We denote O to be the origin in 3D space and the
position of a point P in terms of the {O ; X , Y , Z}coordinate system by (XP , YP , ZP). Note that although
the orientation of the spatial coordinate directions is
selectable, the position of O is not; its position is
determined from the calibration (Appendix A).
The camera focuses 3D space onto the 2D image
plane (Fig. 2). We denote the camera’s focal point by F ,
and we define for each point p in the image plane the ray
Rp that originates at F and contains point p . We call aray such as RP a (camera) line of sight . It contains all the
points in space that could have produced an image at p ;
it is the inverse image of p . For simplicity, we ignore any
bending of the rays by the lens and we assume that the
image is not flipped (Fig. 2 and Fig. A2 and Fig. A3 in
Appendix B). This does not change the analysis because
we associate a unique camera line of sight outside the
camera with each point in the image plane. We denotethe origin in the image plane by o and the coordinate
directions by u and v . The calibration results are used to
locate o and determine the orientations of u and v . The
location of a point p in the image plane under the {o ; u ,
v} coordinate system is denoted by (up , vp). Unless
otherwise stated image locations are always given using
the {o ; u , v} coordinate system.
The camera provides 2D video frames , or frames , forviewing. A video frame is just a scaled version of the
image plane at a fixed instant in time, and because of
this we use the same labels for corresponding entities in
a video frame or the image plane. The important
difference between the two is that in practice we must
determine image plane locations from video frames, and
consequently, we start out with locations given in a
coordinate system specific to the video frame. Those
locations are transformed into the {o ; u , v} coordinate
system of the image plane for 3D reconstruction(Appendix A). We use the units of length from the
video frame for the {o ; u , v} coordinate system, but
since the units are specific to the video equipment we
express them as dimensionless quantities.
Throughout the text we differentiate between 3D
space and 2D images by using upper case text for space
(X , Y , Z ) and lower case text for images (u , v).
Furthermore, we designate that entities are positioned
in space, whereas their images are located in the image
plane or a video frame.
2.3. 3D Reconstruction in general
The reconstruction is based on the premise that wecan determine the 3D position of a point in space given
its 2D image coordinates (u , v ) and its Z position in
space.
Fig. 2. Definitions and dilation mapping: Point O is the origin in 3D
space and is contained by camera line of sight RO . Point P in 3D space
has position (XP , YP , ZP ) and is contained by line of sight RP . RO and
RP appear in the image plane as points o and p , respectively. Point o is
the image plane origin and p is located at (up , vp ) . The camera
provides 2D video frames for viewing, which are scaled versions of the
image plane at fixed instances in time. The dilation mapping (sec. 2.3)
provides (X , Y ) in space given Z in space and (u , v ) in the image
plane: the location of the image of a point P , (up , vp ), specifies line of
sight RP that must contain P , and then ZP specifies (XP , YP ) along
RP .
J. Eian, R.E. Poppele / Journal of Neuroscience Methods 120 (2002) 65�/83 67

Consider an arbitrary point O in 3D space that
generates an image o in the image plane (Fig. 2). Given
the depth of O in space, ZO , we can determine the
remaining coordinates of O because camera line of sightRo contains only one point with Z coordinate ZO . We
can represent this idea in general with a mapping:
D : (u; v;Z) 0 (X ;Y ):
We call D the dilation mapping . Here u and v are the
image plane coordinates of an image point. They specify
the camera line of sight containing all points in space
that could have generated an image at that location. The
Z coordinate makes the point that produced the image
unique within the line of sight; its remaining spatialcoordinates are X and Y . We can express the dilation
mapping in terms of its scalar components for X and Y:
DX : (u; v;Z) 0 X
DY : (u; v;Z) 0 Y :
The realizations of these mappings are determined
from the calibration results as described in Appendix A.For now, we denote them with the general functions that
we call the dilation formulas :
X �DX (u; v;Z)
Y �DY (u; v;Z): (1)
The dilation formulas model the camera optics andare the essence of the reconstruction algorithm. They
provide (X , Y ) positions as a function of Z given a
camera line of sight specified by an image location (u ,
v ). They allow us to combine linkage distances with 2D
images so 3D information can be recovered. For
example, we can determine the Z coordinate of a point
P at unknown position (XP , YP , ZP) given three pieces
of information: (1) the position of a point O in space,(XO , YO , ZO ); (2) the linkage distance between O and
P , DOP ; and (3) the location of the image of P in the
image plane, (uP , vP ). We solve the 3D Euclidean
distance formula relating O to P (Eq. (2) below) for
ZP after eliminating unknowns XP and YP . We
eliminate XP and YP by replacing them with their
respective dilation formulas, XP �/DX (uP , vP , ZP ) and
YP �/DY(uP , vP , ZP ). This is detailed in full next.Let O and P have unknown spatial positions, (XO ,
YO , ZO) and (XP , YP , ZP ), respectively, and let O and
P be linked by a known distance DOP (measured prior to
imaging or known some other way). Let the images of O
and P be o and p , respectively, with image plane
locations (uO , vO) and (uP , vP ) determined from a video
frame (Appendix A).From the 3D Euclidean distance formula we have:
DOP�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi(XO�XP)2�(YO�YP)2�(ZO�ZP)2
q: (2)
Now, suppose that ZO is known, making O the
‘seeding marker’. We can use Eq. (1) to determine XO
and YO given ZO and the location of the image of O ,
(uO , vO ). Next we can re-write Eq. (2) with XP and YP
replaced with their respective dilation formula compo-
nents from Eq. (1):
In Eq. (3) ZP is the only unknown. Indeed, ZO isassumed for the moment; XO and YO are determined
from uO , vO and ZO using Eq. (1); DOP is the known
linkage distance; and uP and vP are the image plane
coordinates for p . We solve Eq. (3) for ZP (for a
solution see Eq. (A7), Appendix B), and then use ZP , uP
and vP in Eq. (1) to determine XP and YP . With the 3D
coordinates of P determined, we can use the procedure
just described to compute the 3D coordinates of anypoint linked to P , and so on.
We describe how to implement this general solution in
the appendices. In Appendix A we describe calibration.
It provides the data used to establish the image plane
coordinate system, {o ; u , v}, and the data to realize the
dilation formulas (Eq. (1)). Although these formulas
may be determined from the calibration data alone, they
can also be derived by considering the geometry of thecamera set-up, and in Appendix B we derive parameter-
ized dilation formulas for a widely applicable camera
geometry. Then, we incorporate these parameterized
dilation formulas into Eq. (3) and solve for the unknown
depth (i.e. for ZP above). In that case the calibration
data is used to determine the parameters. In Appendix C
we describe methods for determining a spatial coordi-
nate for a seeding marker.
3. Methods
We acquired images of objects moved through cyclic
paths by a small robot (Microbot† alpha II�/). We
identified linked points on the objects, i.e. pointsseparated by known fixed distances, and attached flat
circular reflective markers to each of these points (3M
reflective tape, 6 mm diameter). We used our algorithm
DOP�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi[XO�DX (uP; vP;ZP)]2� [YO�DY (uP; vP;ZP)]2� [ZO�ZP]2
q: (3)
J. Eian, R.E. Poppele / Journal of Neuroscience Methods 120 (2002) 65�/8368

to reconstruct the 3D positions of the markers from
images of the markers and the distances between them
on the object.
We tested the algorithm under two conditions. The
first, case A, involved a rigid object whose point
geometry was designated by four markers, A, B, C,
and D (Fig. 3A). We measured various geometric
aspects of the object designated by the markers (angles,
lengths and relative positions) and compared them with
analogous aspects reconstructed from images recorded
while the object was moved.
The robot moved the object through a nearly elliptical
path, with major and minor axis of 18.2 and 2.4 cm
along the horizontal and vertical, respectively (Fig. 3B).
There was also a slight curvature in the path that caused
the robot to deviate outside the vertical plane defined by
the major and minor axes. At the endpoints of the major
axis the robot endpoint was approximately 0.2 cm
outside the plane and closer to the camera, whereas
midway along the major axis the robot was approxi-
mately 0.2 cm further from the camera. The robot also
rotated the object �/58 about a vertical axis passing
through the robot endpoint. The object was affixed to
the robot endpoint at marker D, so this rotation caused
markers A, B and C to move in all three dimensions,
while D moved only along the ellipse of the endpoint
path. We exploited the fact that the path of D was
nearly planar to make D the ‘seeding’ marker forreconstruction (see below).
In case A we collected images with a commercially
available multi-camera 3D system (MotionAnalysisTM
Corp., Santa Rosa, CA). Two cameras (Cohu 4915, 60
frames/s) were placed within 2 m of the object and their
optical axes were 428 apart. Barrel distortions were
avoided by positioning the cameras so the object did not
appear near the edges of the video frames. The opticalaxis of camera 1 was aligned by eye so it was parallel to
a Z direction defined below. Although unnecessary in
general, we did this so we could use the simplified
reconstruction formulas derived in Appendix B (Eqs.
(A5), (A6) and (A7)).
We compared the 3D reconstruction obtained using
the two-camera commercial system with that obtained
using our algorithm and camera 1 alone. We alsoverified that 3D reconstruction was necessary by com-
paring the results with a 2D reconstruction obtained
using camera 1. In all three reconstructions we used the
same set of images recorded with camera 1. We
compared three geometric aspects designated by the
markers, length AD, angle BAD, and angle CDB (Fig.
3A), which were determined from 3D reconstructions of
the marker positions in the 3D reconstructions andstraight from the images in the 2D reconstruction. We
compared geometric aspects rather than positions be-
cause comparisons among dynamic positions could not
reveal which, if any, of the methods was more accurate.
The fixed geometry of the object, on the other hand,
provided a known reference.
We calibrated both cameras for use with the com-
mercial reconstruction software by acquiring images of acalibration cube of markers. The orientation of the cube
defined a 3D coordinate system in the object workspace.
The system software (MotionAnalysisTM Eva 6.0) used
images from both cameras to reconstruct the 3D
positions of the markers for each image frame (60
frames/s).
For reconstruction with our algorithm we defined a
3D coordinate system based on the robot path. Since therobot endpoint moved in an elliptical path that was
nearly contained in a vertical plane (9/0.2 cm, see
above), we defined our Z direction normal to this plane
and Z�/0 in this plane. Then, since D was affixed to the
robot endpoint, we assumed that D was positioned at
Z�/0 throughout the path. Thus D served as the seeding
marker for the reconstructions (Section 2.3 and Appen-
dix C). We defined the X and Y directions as thehorizontal and vertical directions in the Z�/0 plane,
respectively.
We calibrated camera 1 for reconstruction with our
algorithm by following the protocol in Appendix A.
Fig. 3. Test object and subject: (A) Rigid object used for testing. (B)
Test scenario, object was moved in elliptical path by robot. (C) Cat
hindlimb application, a robot attached to the toe moved the limb
through a simulated step cycle in a fashion similar to what is shown in
B. (D) Hindlimb joint angles, the knee joint was fixed to within 9/2.58with a plastic bar (dashed lines).
J. Eian, R.E. Poppele / Journal of Neuroscience Methods 120 (2002) 65�/83 69

Briefly, we recorded 12 still images of a planar grid of
markers (Fig. 4C and D). The grid was oriented normal
to the Z direction and positioned along Z in 1 cm
increments throughout the object workspace, and one
image was recorded at Z�/0 (defined by the robot path).
These data allowed us to determine the location of the
image plane origin, o (Fig. 4D), and to determine the
reconstruction formulas described in the results.We used the algorithm to reconstruct the 3D positions
of the markers from four known distances, DC, CB, BA,
and AD, and the image data from each video frame (60
frames/s). First, we used the commercial system to
determine the locations of the marker centroids in
each frame. The system provided locations in terms of
coordinates referenced from the lower left corner of the
frame, and we coverted these locations into the image
plane {o ; u , v} coordinate system for our algorithm as
described in Appendix A, calibration step 2. With the
marker image locations expressed in {o ; u , v} coordi-
nates, we carried out 3D reconstruction for the indivi-
dual images as described in Section 2.3, except that in
place of Eq. (1) we used its realizations, namely Eq. (4)
and Eq. (5) from the Section 4, and in place of Eq. (3) we
used its solution, namely Eq. (6) from the Section 4.
In each image we started by reconstructing the 3D
position of D because D was the ‘seeding’ marker with
the known Z position, ZD�/ 0. We computed the X and
Y positions of D, (XD, YD), using Eq. (4) and Eq. (5)
given ZD and the location of D in the image in {o ; u , v}
coordinates, (uD, vD). With (XD, YD, ZD) determined we
used Eq. (6) to compute the Z position of C, ZC, given
its image location, (uC, vC), the 3D position of D, (XD,
YD, ZD), and the distance between D and C on the
object, DDC. Then we used Eq. (4) and Eq. (5) to
Fig. 4. Calibration and dilation formulas: (A) (case A) and (B) (case B): Actual (X , Y ) positions of grid markers in space (�/) superimposed on those
predicted by the dilation formulas (m). The dilation formulas were applied to the image data superimposed in C (case A) and D (case B). C and D
show 12 images of a grid of markers that were recorded with the grid at various Z positions (depths). The (X , Y ) positions of the markers in space
were held constant for all 12 images, but their u�/v locations in the images changed (C and D) because the Z position of the grid changed. (C) (case A)
and (D) (case B): Superimposed calibration grid images (Appendix A). The marker images converge to a point as the calibration grid is moved away
from the camera along the Z direction. This point is defined as the image plane origin, o . The larger points in D are from the calibration grid image
acquired with the grid nearest to the camera.
J. Eian, R.E. Poppele / Journal of Neuroscience Methods 120 (2002) 65�/8370

determine the XC and YC. We worked from C to B in a
similar manner, and so on along the chain of markers
D�/C�/B�/A�/D. We compared the initial 3D position of
D to that determined by iterating around the chain D�/
C�/B�/A�/D to examine the error introduced by the
iterative nature of the reconstruction algorithm.
We also determined the geometric aspects designated
by the markers after reconstructing along the chain D�/
C�/B�/A. For example, in examining the angle formed
by markers BAD, we used the 3D position of A
determined by iterating along the chain D�/C�/B�/A
and the 3D position of B from iterating along D�/C�/B.We could have determined the position of A directly
from the position of D and distance DA, and likewise
the position of B directly from D and DB. However, in
most circumstances the object in question will not be
completely rigid, and reconstructing along the chain D�/
C�/B�/A better simulated a typical application. (Note
also that in reconstructing length AD we used the
position of A determined by iterating along D�/C�/B�/
A and compared it with D.)
In the 2D reconstruction we scaled the video frames
so relative locations of markers positioned in the Z�/0
plane were separated by correct distances. (The relative
locations of markers positioned outside the Z�/0 plane
were distorted.)
The second test for our algorithm, case B, involved
reconstructing the 3D geometry of a cat hindlimb. Thiscase presented an object with a changing geometry that
consisted of a set of linked rigid segments. We used
video data generated by Bosco et al. (2000) for the
reconstruction. They used the same robot to move the
animal’s foot through 2D paths that simulated the
locomotion step cycle of a cat (Bosco and Poppele,
1999). In their experiment the toe was affixed to the
robot endpoint with a Velcro strip glued to the toe pad,and the pelvis was held in place with pins at the iliac
crests. Markers were placed on the toe (T), ankle (A),
knee (K) and hip (H) to describe limb geometry (Fig.
3C). In the experimental condition we analyzed the knee
joint angle was fixed by a rigid constraint that confined
knee angle motion to a few degrees (Fig. 3D). The
constraint was a Plexiglas strip attached to bone pins in
the femur and tibia (Bosco et al., 2000). The distancesbetween adjacent markers (i.e. T�/A, A�/K, and K�/H)
were measured prior to imaging and were available for
3D reconstruction. As in case A, we defined the Z
direction normal to a vertical pane defined by the robot
path, Z�/0, and the X and Y directions as the
horizontal and vertical directions in this plane, respec-
tively. The toe was affixed to the robot and served as the
seeding marker at Z�/0 for reconstruction.In this case image data was acquired with a single
CCD TV camera (Javelin NewchipTM
model 7242, 60
frames/s), and marker centroids were located in 2D
video frames using a MotionAnalysisTM
model V100
system operating in a 2D mode. The camera was
positioned in a manner similar to that described in
case A. Barrel distortion was avoided by ensuring object
images did not appear near the edges of the video frameand the optical axis of the camera was parallel to the Z
direction (aligned by eye). Therefore, we performed 3D
reconstruction with our algorithm in this case exactly as
described in case A.
Some of the variability in the reconstructions was due
to variability in determining locations of marker cen-
troids in the video frames. We estimated this variability
as an RMS error for the two systems we used. We didthis by acquiring 30 images of a grid of markers, and
computing the square root of the mean of the differences
between the average locations and those in each frame.
4. Results
4.1. Reconstruction formulas
We used the algorithm for 3D reconstruction with
two different imaging systems (case A and B, Section 3).
In both cases, we followed the five step calibration
protocol in Appendix A to determine realizations for the
general reconstruction formulas (Eq. (1) and Eq. (3),
Section 2.3), and also to determine the image plane
coordinate system ({o ; u , v}, Section 2.2).We acquired the calibration images superimposed in
Fig. 4C for case A and Fig. 4D for case B (Appendix A,
calibration step 1). The �/ in each of these figures
denotes the location of the image plane origin, o , for the
{o ; u , v} coordinate system used by the algorithm
(Appendix A, calibration step 2). In both cases the u and
v directions in the image plane were the horizontal and
vertical, respectively, because we selected the X and Y
directions in space as the horizontal and vertical,
respectively (Appendix A, calibration step 2).
We determined realizations of Eq. (1), the ‘dilation
formulas’, to model the optics of the camera, i.e. to
model the camera lines of sight (Section 2.3). They
provided the (X , Y ) position of a marker in space given
its (u , v) location in an image and its Z position in
space. The (u , v ) location specified a line of sight, andthe Z position specified X and Y within this line of sight
(Eqs. (4) and (5) below). In both cases A and B the
optical axis of the camera was parallel to the Z direction
(Section 3), so we were able to use the parameterized
dilation formulas derived for that alignment in Appen-
dix B, Eqs. (A5) and (A6) (Appendix A, calibration step
4). There were two parameters*/a and b*/ that we
determined from the calibration data (Appendix A,calibration steps 3 and 5). In both cases a�/0.01 and
b�/0.99 cm. Thus the realizations were:
X �u(0:01Z�0:99) (4)
J. Eian, R.E. Poppele / Journal of Neuroscience Methods 120 (2002) 65�/83 71

Y �v(0:01Z�0:99): (5)
We tested Eq. (4) and Eq. (5) by comparing (X , Y )
positions they predicted with actual positions. The
predicted positions (dots) are superimposed on actualpositions (crosses) in Fig. 4A for case A and Fig. 4B for
case B. In each case the predictions were generated from
12 calibration images, which are shown in Fig. 4C and D
for cases A and B, respectively. The images were of a
planar grid of markers acquired with the grid at a
different Z position in space (1 cm increments along Z ,
Section 3). Although the Z position was changed, the
X �/Y position of the grid was held fixed (to within �/9/
0.2 cm), so in both cases the (X , Y ) position of each
marker was essentially the same in all 12 images.
Therefore the same set of actual (X , Y ) positions applied
for all 12 images. (Note that there are 12 dots*/one for
each Z position of the grid*/associated with each cross
in the figures).
The RMS radial error between the actual (X , Y )
marker positions and those predicted by Eq. (4) and Eq.(5) from all 12 images was 0.09 cm (0.2 cm maximum) in
case A and 0.13 cm (0.3 cm maximum) in case B.
Approximately half of this error was due to variability
of the system used to determine marker centroid
locations in the images. The system introduced a RMS
variability of 0.061 cm in case A and 0.05 cm in case B
(Section 3). We assumed that the remaining half of the
estimation error, �/0.05 cm RMS, was due to smallerrors in the X �/Y position of the grid when its Z
position was changed. Given that we designated (X , Y )
positions with 0.6 cm diameter flat markers separated by
E/4.0 cm, the �/0.1 cm errors we encountered in
estimating these positions suggested that Eq. (4) and
Eq. (5) effectively modeled the camera lines of sight.
The final reconstruction formula realized was Eq. (3)
and its solution. Eq. (3) was a modified 3D Euclideandistance formula that accounted for the camera optics
by replacing the X and Y coordinates with their dilation
formula analogues. In Appendix B, we substitute the
parameterized dilation formulas used here, Eq. (A4) and
Eq. (A5), for the generalized dilation formulas appear-
ing in Eq. (3), and solve the resulting equation for the
unknown, Z2 in this case. The parameterized solution is
Eq. (A7) in Appendix B. It contained the same para-meters as Eq. (A4) and Eq. (A5), so with a�/0.01 and
b�/0.99 cm, the solution for the realization of Eq. (3)
was
Z2�Z1 � a9
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi(a� Z1)2 � b(x� D2
1;2 � Z21)
qb
; (6)
where
a� [0:01](X1u2� [0:99]u22�Y1v2� [0:99]v2
2)
b�1� [0:01]2(u22�v2
2)
x�X 21 �2[0:99]X1u2�Y 2
1 �2[0:99]Y1v2� [0:99]2
� (u22�v2
2):
Eq. (6) was the backbone of the 3D reconstruction
algorithm. We used it to compute the Z coordinate of a
second marker, Z2, given the image location of the
second marker, (u2, v2), the position in space of a linked
marker, (X1, Y1, Z1), and the linkage distance between
the two markers, D1,2. Once we computed Z2 we used
Eq. (4) and Eq. (5) along with (u2, v2) to compute (X2,
Y2).
4.2. 3D Reconstruction
The reconstruction in case A involved a rigid object
that was moved in space so its geometry in the images
changed. In case B, a cat hindlimb was moved, and in
this case the geometry of the limb also changed as it was
moved. The first case allowed us to assess the accuracyof the reconstruction algorithm against a known and
fixed geometry, while the second presented a more
general reconstruction application.
4.2.1. Rigid object
We placed markers on the rigid object as depicted in
Fig. 3A at positions A, B, C and D. The object was
affixed to the robot at marker D and was moved
through a 2D elliptic path that was nearly containedin a vertical plane (Fig. 3B, Section 3). We selected the Z
direction normal to this plane and set Z�/0 in this
plane, which made the Z coordinate of D essentially
constant throughout the path, ZD�/0, so we used D as
the ‘seeding’ marker for our 3D reconstruction (Sections
3 and 2.3).
Since our algorithm requires the 3D position of one
marker to reconstruct the 3D position of the next(Section 2.3), we examined whether cumulative errors
became significant by comparing the 3D position of the
seeding marker, D, with that reconstructed by iterating
back to D around the chain of markers D�/C�/B�/A�/D
(Fig. 3A). We did this for 810 video frames (60 frames/
s), or approximately 2/12
cycles around the path. The
RMS error between the two positions was 0.17 cm(average error 0.16 cm, S.D. 0.071 cm, maximum single
frame error 0.41 cm), compared to the 0.1 cm RMS
error obtained for static positions. This demonstrated
that, at least in this case, iteration did not result in
significant magnification of errors.
We compared our 3D reconstruction algorithm with
two other methods by collecting images of the moving
object with a commercially available multi-camera 3Dsystem (Section 3). We made comparisons of two angles,
BAD and CDB, and one length, AD, over 810 video
frames. The comparisons are summarized in Table 1.
J. Eian, R.E. Poppele / Journal of Neuroscience Methods 120 (2002) 65�/8372
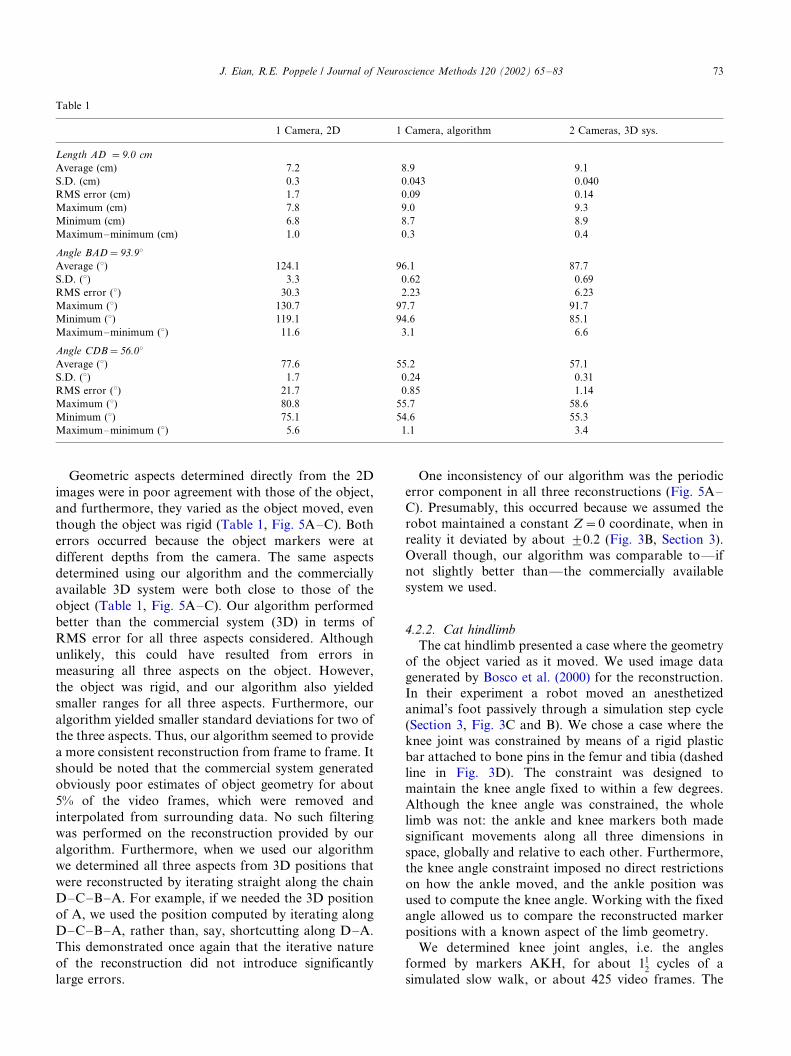
Geometric aspects determined directly from the 2D
images were in poor agreement with those of the object,
and furthermore, they varied as the object moved, even
though the object was rigid (Table 1, Fig. 5A�/C). Both
errors occurred because the object markers were at
different depths from the camera. The same aspects
determined using our algorithm and the commercially
available 3D system were both close to those of the
object (Table 1, Fig. 5A�/C). Our algorithm performed
better than the commercial system (3D) in terms of
RMS error for all three aspects considered. Although
unlikely, this could have resulted from errors in
measuring all three aspects on the object. However,
the object was rigid, and our algorithm also yielded
smaller ranges for all three aspects. Furthermore, our
algorithm yielded smaller standard deviations for two of
the three aspects. Thus, our algorithm seemed to provide
a more consistent reconstruction from frame to frame. It
should be noted that the commercial system generated
obviously poor estimates of object geometry for about
5% of the video frames, which were removed and
interpolated from surrounding data. No such filtering
was performed on the reconstruction provided by our
algorithm. Furthermore, when we used our algorithm
we determined all three aspects from 3D positions that
were reconstructed by iterating straight along the chain
D�/C�/B�/A. For example, if we needed the 3D position
of A, we used the position computed by iterating along
D�/C�/B�/A, rather than, say, shortcutting along D�/A.
This demonstrated once again that the iterative nature
of the reconstruction did not introduce significantly
large errors.
One inconsistency of our algorithm was the periodic
error component in all three reconstructions (Fig. 5A�/
C). Presumably, this occurred because we assumed the
robot maintained a constant Z�/0 coordinate, when in
reality it deviated by about 9/0.2 (Fig. 3B, Section 3).
Overall though, our algorithm was comparable to*/if
not slightly better than*/the commercially available
system we used.
4.2.2. Cat hindlimb
The cat hindlimb presented a case where the geometry
of the object varied as it moved. We used image data
generated by Bosco et al. (2000) for the reconstruction.In their experiment a robot moved an anesthetized
animal’s foot passively through a simulation step cycle
(Section 3, Fig. 3C and B). We chose a case where the
knee joint was constrained by means of a rigid plastic
bar attached to bone pins in the femur and tibia (dashed
line in Fig. 3D). The constraint was designed to
maintain the knee angle fixed to within a few degrees.
Although the knee angle was constrained, the wholelimb was not: the ankle and knee markers both made
significant movements along all three dimensions in
space, globally and relative to each other. Furthermore,
the knee angle constraint imposed no direct restrictions
on how the ankle moved, and the ankle position was
used to compute the knee angle. Working with the fixed
angle allowed us to compare the reconstructed marker
positions with a known aspect of the limb geometry.We determined knee joint angles, i.e. the angles
formed by markers AKH, for about 1/12
cycles of a
simulated slow walk, or about 425 video frames. The
Table 1
1 Camera, 2D 1 Camera, algorithm 2 Cameras, 3D sys.
Length AD �9.0 cm
Average (cm) 7.2 8.9 9.1
S.D. (cm) 0.3 0.043 0.040
RMS error (cm) 1.7 0.09 0.14
Maximum (cm) 7.8 9.0 9.3
Minimum (cm) 6.8 8.7 8.9
Maximum�/minimum (cm) 1.0 0.3 0.4
Angle BAD�93.98Average (8) 124.1 96.1 87.7
S.D. (8) 3.3 0.62 0.69
RMS error (8) 30.3 2.23 6.23
Maximum (8) 130.7 97.7 91.7
Minimum (8) 119.1 94.6 85.1
Maximum�/minimum (8) 11.6 3.1 6.6
Angle CDB�56.08Average (8) 77.6 55.2 57.1
S.D. (8) 1.7 0.24 0.31
RMS error (8) 21.7 0.85 1.14
Maximum (8) 80.8 55.7 58.6
Minimum (8) 75.1 54.6 55.3
Maximum�/minimum (8) 5.6 1.1 3.4
J. Eian, R.E. Poppele / Journal of Neuroscience Methods 120 (2002) 65�/83 73

knee angle in the 2D video ranged from 110 to 1408 (Fig.5D) and never matched the actual angle, which was
about 1008. When we computed the knee angle after first
reconstructing the 3D positions of the markers, it
remained within 9/2.48 of 99.68 (Fig. 5D).
4.3. Effects of errors
We used the rigid object data to examine the effects of
two possible sources of error on reconstruction accu-
racy: linkage distance measurement errors and seeding
marker Z position errors. We tested these because they
are sources of error that are not present in most multi-
camera methods. We checked their effects on recon-
structed lengths, angles and positions.
We found that errors in the Z position of the seedingmarker had little effect on reconstruction accuracy. Of
course, shifting the seeding Z position caused a shift in
the Z positions of all the other markers, but their
relative positions changed little. One of the worst cases
we encountered involved object angle CDB (Fig. 3A). It
measured 568 on the object and after reconstruction was
55.28 average, S.D. 0.248. Introducing a 9/1 cm error in
the seeding marker Z position, which was about 10�/
20% of a linkage distance, resulted in only an additional
9/18 error.
On the other hand, we found that the method was
sensitive to linkage distance measurements. For exam-
ple, introducing an 11% error in length CB (9/1 cm for a
9 cm linkage) resulted in a 9/58 error in reconstructing
angle CBD. The error caused the position of C to
change little along the X and Y directions (B/0.5 cm
typically), but along the Z direction (depth) the position
of C changed by more than 10% of the linkage distance
(�/9/1 cm) in many of the images. The distance between
C and D was off by 10% on average (0.6 cm average
error in a 5.8 cm linkage). Introducing errors in other
linkage distances had similar effects.
Fig. 5. 3D reconstruction: (A�/C): Rigid object. Three reconstruction methods (see text) were compared by estimating various geometric aspects of a
rigid object. In the plots, the straight line is the actual value of the estimated aspect. Along the ordinates length units are (cm) and angle units are (8).The abscissa denotes the video frame number (60/s). (D): cat hindlimb. The knee angle was constrained to within about 9/2.58 of play (Fig. 3D). The
knee angles were computed directly from the 2D video and after 3D reconstruction using our algorithm. Ordinate is (8), abscissa is video frame
number (60/s).
J. Eian, R.E. Poppele / Journal of Neuroscience Methods 120 (2002) 65�/8374

5. Discussion
The single-camera method we described here per-
formed as well as a commercially available 3D recon-struction system with 2 fixed cameras. Since our
algorithm uses knowledge of linkage distances to
determine information that is typically provided by a
second camera, it is less general than multi-camera
methods. Nevertheless it has a number of advantages
including lower cost and reduced complexity. Also, set-
up for this method is simple because neither camera
position nor optical alignment need conform to anyspecifications. Thus the method may be useful in
situations where environmental constraints limit the
space available for clear camera views of the object.
The accuracy of our method is comparable with that
of a number of other methods. Miller et al. (1980) tested
their single-camera method with a moving rigid object in
a fashion similar to case A above (Section 4.2). In the
better of two tests, they reported RMS errors of 0.533cm when estimating positions. The positional RMS
error encountered using our algorithm when comparing
the initial position of D with its position determined by
iterating around a marker chain was 0.17 cm. We
encountered slightly larger RMS errors in estimating
angles (0.85 and 2.238, Section 4.2) than the 1.0, 0.8, and
0.698 reported by Miller et al.
Marzan and Karara (1975) used their multi-cameraDLT method to estimate the position of static points
and reported a standard deviation of 0.07 mm (Shapiro,
1980). In comparison, we achieved a standard deviation
of 0.9 mm in estimating the (X , Y ) coordinates of static
points, and the commercial 3D system we used exhibited
a standard deviation of 0.6 mm in estimating the same
positions (Section 4.1).
The main advantage of the multi-camera DLTmethod over single-camera methods is the DLT method
requires nothing in addition to the images for 3D
reconstruction. The 3D position of a lone marker is
determined by combining information from images
acquired from different vantage points. Also, imple-
menting the DLT method is simple because calibration
amounts to acquiring images of at least six fixed points
at known positions in space. A computer program (firstproposed by Marzan and Karara, 1975) is used to
calculate parameters that eliminate the need for addi-
tional measurements by accounting for the position and
orientation of the cameras, while also providing linear
corrections for lens distortions. Thus, given the overall
quality of the DLT method, multiple cameras are often
employed to record 3D geometry. Nevertheless, our
method can serve as a comparable substitute when costor environmental factors impose constraints.
Our method does have two possible sources of error
that are not present in standard multi-camera 3D
methods, however. These can arise from errors in
measuring distances between linked markers or from
errors in determining the Z position of the seeding
marker. In our case, the reconstruction algorithm was
robust with respect to the latter. The worst-case wefound (Section 4.3) was an additional 9/18 error in
reconstructing angle CDB (Fig. 3A) from a 9/1 cm error
in the Z position of the seeding marker, which was 10�/
20% of the object size. In this case the imaging region
was 30�/30 cm2 along X and Y at a distance of 1.5 m
from the camera along Z . Consequently, all the camera
lines of sight were nearly normal to the X �/Y planes,
and relatively large changes in Z position were requiredto induce significant changes in image locations. The
predominant effect of the seeding marker Z error was a
shift in the reconstructed Z positions of all markers by
the error.
Although the camera lines of sight were near normal
to the X �/Y planes, this did not mean the optics of the
camera could be ignored. For example, if we ignored
optics by assuming all lines of sight were normal to theimaging plane (and therefore parallel to each other),
then in Eqs. (4) and (5) parameter a would be zero so Z
position and image location would be unrelated. In such
a case, the calibration images shown in Fig. 4C and D
would be scaled versions of the predicted (X , Y )
positions of the grid markers, which we know is wrong
since their actual (X , Y ) positions were constant
throughout the calibration (Section 4.1).We examined this issue further by reconstructing 3D
object geometry while ignoring camera optics. The
assumption was the camera lines of sight were parallel
to one another and normal to the X �/Y planes. We
derived the reconstruction equations for this assumption
in Appendix C, which is the limiting case as the camera
is positioned infinitely far from the object. Those
equations are equivalent to the ones we used exceptwith parameter a , which accounts for optics, set to zero
(Section 4.1). We pursued the issue because in our case
parameter a�/0.01 was small relative to parameter b�/
0.99 (cm), and Z varied only within 9/6 cm of Z�/0
(cm), so the aZ term that accounted for optics in Eq. (4),
X�/u (aZ�/b ), was always small relative to the scaling
parameter, b . The situation was similar for related
reconstruction Eq. (5) and Eq. (6) (Section 4). Whenwe performed 3D reconstructions without accounting
for optics, i.e. with parameter a�/0, accuracy was
compromised. For example, length AD and angle
BAD were fixed on the object (Fig. 3A), and in our
3D reconstruction they varied by 0.26 cm and 3.08,respectively (Section 4.2 case A). When we ignored
optics, the values varied by 0.37 cm and 4.58, respec-
tively, a 50% increase in error. Thus, although the opticsparameter was relatively small, it was nonetheless
important for an accurate reconstruction.
The second possible source of error is the measure-
ment of linkage distances. For example, an 11% error in
J. Eian, R.E. Poppele / Journal of Neuroscience Methods 120 (2002) 65�/83 75

length CB (9/1 cm for a 9 cm linkage), resulted in a 9/58error in the computed value of angle CDB and caused
the Z position of marker C to change by over 11%
(more than 1 cm for a 9 cm linkage) in many frames.
The large change in Z occurred because the linkage
distance error is absorbed by changing the reconstructed
position of marker C along the camera line of sight
specified by the image of C, RC (Fig. 2 and Section 2.3),
and in this case all lines of sight were nearly parallel to
the Z direction. Since in the case we examined the
linkage between C and B was nearly orthogonal to RC,
the position of C had to change along RC by a distance
that was often larger than the error in distance CB. We
expect that the method will always be sensitive to
linkage distance errors because positions are recon-
structed by finding the point along a given line of sight
that matches the linkage distance from a previously
reconstructed point.
One caveat of the method is the quadratic form of Eq.
(3). It yields for each reconstructed marker position two
Z solutions and consequently, two possible 3D posi-
tions. There is no mathematical way around this in our
algorithm. Usually though, comparison of the two
positions with the next linked marker will prove one
position degenerate, because the distance to the next
marker will be wrong for one of the two positions. A
rough knowledge of the configuration of the object may
also resolve the ambiguity. Of course, it is possible to
contrive scenarios where both positions for a marker are
viable (an example is given in Appendix B). However, in
such cases it may not be necessary to remove the
ambiguity. For example, if the marker is needed only
to build toward another marker whose position is
critical, then either position can be used. A worst-case
solution would be to use a second camera just to record
a rough estimate of the depth(s) (i.e. in front or behind)
of the ambiguous markers(s)*/but without fully inte-
grating the second camera with the imaging system.
Presumably though, in most cases a simpler more cost
effective solution would exist if the problem arose.
A motivation for using 3D imaging instead of 2D is
that subtle, yet important aspects of object geometry can
be lost when 2D images are used*/even when 3D
reconstruction appears unnecessary. For example,
Gard et al. (1996) described how out of plane rotations
of the human hip may result in errant conclusions about
gait when 2D imaging is employed. Use of this
algorithm could help resolve such issues without the
need for additional equipment.
Another potential use for the algorithm is in machine
vision guided robots. Given the linkage distances of a
robot arm, this algorithm could be used in conjunction
with a single-camera to provide and accurate estimate of
the arm position*/without the burden of multiple views
of the arm.
Acknowledgements
The authors thank G. Bosco and A. Rankin for
critical reviews of the manuscript. R. Bartosch helpedwith the figures. Also thanked are the Eian family, T.R.
Crunkinstein and W. Moch for developmental sugges-
tions, and Squantak 57 for additional help with the
figures. The work was supported by National Institute
of Neurological Disorders and Stroke grant NS-211436.
Implementation appendices
In the appendices that follow we detail the algorithm
implementation. Here, we provide an overview of the
process in the form of a recipe. Note that we use the
technical terms defined in Section 2.2 throughout the
appendices.
First acquire the calibration data as described in
Appendix A. This amounts to defining a 3D coordinate
system in the object workspace, and recording stillimages of a grid of markers moved incrementally
throughout the depth of the workspace. These images
are used to determine the image plane origin, o , as
illustrated in Fig. 4D and described Appendix A,
calibration step 2. They are also used to ascertain
realizations for the general reconstruction formulas
derived in Section 2.3 (Eq. (1) and Eq. (3)). We
derivative some parameterized realizations based ongeometric considerations in Appendix B.
Next, carry out 3D reconstruction by first determin-
ing the Z position in space of a ‘seeding marker’ on the
object. This can be done a number of ways, all of which
are described in Appendix C. Next, the (X , Y ) coordi-
nates of the seeding marker are computed given its Z
coordinate and the location of its image relative to o in
the image plane, (u , v ); realizations of Eq. (1)*/forexample, Eq. (A5) and Eq. (A6)*/are used for this
(Section 2.3). Then, the solution for Eq. (3) (for
example, Eq. (A7)) is used to compute the Z position(s)
of any marker(s) linked to the seeding marker. With the
Z position(s) of the linked marker(s) computed, the
process is repeated for the next linked marker(s).
Appendix A: Calibration and dilation formula realizations
Calibration provides the data used to determine the
image plane coordinate system ({o ; u , v}, Section 2.2)
and the realizations of the reconstruction equations
(realizations for Eq. (1) and Eq. (3), Section 2.3).
But before calibration can be performed, the spatial
directions*/X , Y , and Z */must be selected. In generaltheir orientation may be arbitrary. However, they can
often be oriented so the determination of ‘seeding’
marker is simple, and we describe this in Appendix C.
J. Eian, R.E. Poppele / Journal of Neuroscience Methods 120 (2002) 65�/8376

For now, we assume the spatial directions have been
selected, and we also assume the Z direction is the
coordinate direction most nearly parallel to the optical
axis of the camera. Note that the spatial origin, O , is notdefined beforehand; instead, it is determined from the
calibration. This allows us to avoid additional transfor-
mations that would otherwise complicate the recon-
struction formulas.
Calibration consists of five steps: (1) acquiring the
data; (2) determining the image plane coordinate system
{o ; u , v} and relating it to the spatial coordinates; (3)
determining the (X , Y ) position of the ‘calibration grid’(see below); (4) deriving parameterized reconstruction
formulas; and (5) determining the reconstruction equa-
tion parameters.
Step 1 is to acquire the calibration data. First, a
planar grid of markers, the calibration grid , is con-
structed (for example, see large points in Fig. 4D). The
grid should span the X �/Y portion of the object work-
space and should contain enough markers for statisticalestimation of the dilation formulas. Still images of the
grid are acquired as it is moved incrementally along the
Z direction throughout the depth of the object work-
space. The incremental distances are measured and
recorded. It is critical that the grid is oriented normal
to the Z direction. Also, the grid must be moved only
along the Z direction without changing its (X , Y )
position. However, small deviations are acceptablebecause they can be averaged out later (we achieved
satisfactory results with eyeball alignments).
Step 2 is to determine the image plane coordinate
system, {o ; u , v} (Section 2.2), and to connect it with the
spatial coordinate directions. We define the image plane
origin, o , as the image of the camera line of sight parallel
to the Z direction in space. In other words, o is the
image plane location that specifies the camera line ofsight parallel to the Z direction. We denote this line of
sight by Ro . Since Ro parallels the Z direction it has
constant X and Y coordinates, and we define X�/0 and
Y�/0 along Ro (the coordinate directions in 3D space
are selectable, but their 0 coordinates are defined based
on the calibration). Since X�/Y�/0 along Ro it contains
the origin in 3D space, O . Thus the image plane origin,
o , is the image of the spatial origin, O , and thisrelationship allows us to conveniently convert locations
in the images to positions in 3D space. We define the
Z�/0 coordinate for O by assigning one of the calibra-
tion images as acquired with the grid at Z�/0. The u
and v directions are defined as the images of the X�/0
and Y�/0 planes in space, respectively, (it follows from
the fact that o is the image of O that u and v will always
be straight lines).We locate o in the image plane using the calibration
grid images as illustrated in Fig. 4D, which shows 12
images superimposed. The point images of the markers
are grouped so all points in a group correspond to the
same marker in the grid. It may be seen that the points
in each group fall on a line, and that the lines intersect at
the point to which the images converge (Fig. 4D and B).
Since the grid is moved only along the Z direction, this
convergence point is the image of the camera line of
sight parallel to the Z direction. This point is by
definition the location of the origin, o, for the {o ; u ,
v} coordinate system.
The process of locating o is carried out statistically by
digitizing the calibration grid images. This yields the
locations of the markers in terms of the digitizer
coordinate system. A straight line is fit to each group
of points, and the digitizer coordinates of o are given by
the location that best estimates the intersection of all
these lines. All this is done in a least-squares sense.
The digitizer coordinates of o are needed to express
locations in the images in terms of the {o ; u , v}
coordinate system. The digitizer provides locations in
the video frames in terms of digitizer coordinates, and
we re-express these locations relative to o by subtracting
from them the digitizer coordinates of o . Then, if
necessary the digitizer coordinate directions are rotated
so they parallel the u and v directions from {o ; u , v}.
We use the lengths provided by the digitizer for lengths
in the {o ; u , v} coordinate system. In this way we
convert video frame locations into the {o ; u , v}
coordinate system for use with the 3D reconstruction
algorithm.
Step 3 is to determine what the 3D positions (relative
to the spatial origin, O ) of the markers in the calibration
grid were when their images were recorded. These
positions are not measured during calibration. Instead,
they are determined as follows. First, one of the grid
images is assigned as acquired at Z�/0. For example, in
our case we acquired one of the grid images with the grid
in the plane defined by the robot paths (Section 3), and
we assigned that image as acquired with the grid at Z�/
0. In this way we connected the Z�/0 position of the
‘seeding’ marker with the calibration data. The incre-
mental distances the grid was moved define the other Z
positions of the grid. This is why the grid must be
oriented normal to the Z direction: so the Z positions of
all the markers in each image are the same; this also
keeps the (X ,Y ) positions constant. We determine the
(X , Y ) positions of the markers using the ‘proportional’
locations of the marker images relative to the image
plane origin, o , and the distances between adjacent
markers in the grid. Suppose, for example, o is located 14
of the way along the u direction between two images of
markers separated by 4 cm along the X direction in the
calibration grid. Then when the grid image was
acquired, the two markers were positioned at X�/�/1
cm and �/3 cm in space, respectively. To see why,
consider Fig. A1 and these three facts: (1) by construc-
tion, Ro parallels the Z direction and has constant (X ,
J. Eian, R.E. Poppele / Journal of Neuroscience Methods 120 (2002) 65�/83 77

Y ) coordinates (0, 0) in space; (2) o is the image of Ro
and (3) the calibration grid is always oriented normal to
the Z direction. Therefore, the grid images scale radially
about o as the Z position of the grid changes, and it
follows that the ‘proportionate’ locations of the marker
images relative to o are independent of the Z position of
the grid. We approach the Y coordinate in a similar
fashion, and use the distances between adjacent markers
in the calibration grid (measured on the grid) to work
outward from o and determine the (X , Y ) positions of
all the markers in the grid. Only one grid image is
required for this since the (X , Y ) position of the grid is
held constant as it is imaged at various Z positions.
Results from multiple images can be averaged to
improve accuracy.Step 4 is to determine candidate dilation formulas.
First, the (u , v , Z ) triplets for the dilation formula
arguments (Eq. (1), Section 2.3) are formed from the
calibration data. The location of each marker image (in
terms of the {o ; u , v} coordinate system) is coupled with
the Z position of the calibration grid when its image was
acquired. The (u , v , Z ) triplets are paired with the (X ,
Y ) position in of the marker that produced the image
(see step 3). The geometry of the camera set-up and/or
the characteristics of the (u , v , Z )�/(X , Y ) pairs are used
to ascertain candidate parameterized dilation formulas.
We derive parameterized dilation formulas based on
geometric considerations in Appendix B.
Step 5 is to estimate the candidate formula para-
meters using the (u , v , Z )�/(X , Y ) pairs (for example,
minimizing over all triplets (u , v , Z ) the sum of the
squared errors between the actual (X , Y ) position ofeach grid marker and those predicted by the candidate
dilation formula). Steps 4 and 5 can be repeated until the
simplest dilation formulas with a satisfactory fit to the
(u , v , Z )�/(X , Y ) data are achieved.
Appendix B: Derivations of parameterized dilation
formulas
Here we use geometric considerations to derive
parameterized realizations for the dilation formulas
(Eq. (1), Section 2.3). This is done first for the casewhen the optical axis of the camera is parallel to the Z
direction in space. We call this the aligned camera
scenario. Presumably, it will often be possible to align
the camera, so the corresponding dilation formulas will
be widely applicable. Note that this alignment need not
be exact to achieve acceptable results. We aligned our
camera with the Z direction by eye. We consider
arbitrary alignment below.As discussed in Section 2.3, the dilation formulas we
will derive provide (X , Y ) given (u , v , Z ), where (X , Y ,
Z ) is a position in space that appears at location (u , v ) in
the image plane. We start out by considering an
arbitrary point in the image plane, p . The location of
p , (up , vp ), specifies camera line of sight Rp that must
contain P in space that generated p in the image (Fig.
A2). Given Rp , we model how X and Y vary within Rp
as functions of Z . To do this we rely heavily on the fact
that by definition the image plan origin, o , specifies the
camera line of sight with (X , Y ) coordinates (X , Y )�/
(0, 0) (Appendix A, calibration step 2). We derive the X
and Y components of the dilation formulas by using the
slopes relative to Ro of the projections of Rp into the
X�/0 and Y�/0 planes (Fig. A2). We’ll work in the Y�/
0 plane to determine X . The determination of Y in X�/0is identical because of the radial symmetry. In Fig. A2
ray R/Y�0p is the projection of Rp into the Y�/0 plane.
We’ll denote the slope of R/Y�0p relative to Ro by MX .
For appropriately selected u* and z* we have
MX �arctanuX �u�
z�: (A1)
Since we want MX in terms of the image data, we see
from Fig. A2 that the u coordinate of the location of p ,
up in the image plane, must serve as the numerator
(u*�/up) in Eq. (A1). This forces the denominator z* to
be the distance between the camera focal point F and
the image plane origin o . If we denote this distance by 1/a , then z*�/ 1/a and from Eq. (A1) we have
MX �aup: (A2)
Fig. A1. Determining grid marker (X , Y ) positions from calibration
images: In the example depicted in the figure the image plane origin
(�/) lies 14
of the way from the left along the u direction between the two
circled marker images. If we suppose in 3D space the two circled grid
markers are separated by 4 cm along the X direction, it follows that
they must have X positions of �/1 cm and �/3 cm relative to the spatial
origin, O . See text for details. Note that this figure depicts the general
calibration case where the optical axis of the camera is not parallel to
the Z direction (i.e. not parallel with ray RO ). For the case depicted,
this causes the markers to be closer together on the left side of the
image.
J. Eian, R.E. Poppele / Journal of Neuroscience Methods 120 (2002) 65�/8378

The distance 1/a is used to model the optics of the
camera and is not known or measured directly. It is one
of the dilation formula parameters determined from the
calibration data (Appendix A, calibration step 5).We see from Fig. A2 that we can use MX and the
distance along Ro between F and P to determine the
distance along the X direction between P and Ro . Since
by construction (1) Ro parallels the Z direction and (2)
X�/0 along Ro , the latter distance is just the X -
coordinate of P , XP , and the former distance is along
the Z direction, so we’ll denote it by DZP,F (DZP,F not
shown in Fig. A2). We have
XP�MX (DZP;F );
and after combining this with Eq. (A2)
Xp�aup(DZP;F ): (A3)
In Eq. (A3) we need to express DZP,F in terms of ZP ,
the depth of P relative to the origin O . If we let b be a
second parameter such that b /a is the distance betweenF and O , then
DZP;F �ZP�b
a: (A4)
As with parameter a , parameter b is determined from
the calibration data (and consequently, the actual
position of O in space need not be measured). Combin-
ing Eq. (A3) and Eq. (A4) yields
Xp��
Zp�b
a
�aup:
Moving parameter a inside the parenthesis and
dropping the subscripts yields the final form of the X
component of the dilation formulas:
X �u(aZ�b)�DX (u; v;Z): (A5)
The Y component of the dilation formula is derived
similarly, and we have
Y �v(aZ�b)�DY (u; v;Z): (A6)
Both components share the same parameters a and b
because of the radial symmetry that exists when the
camera is aligned with the Z direction.
Incorporating Eq. (A5) and Eq. (A6) into the 3D
Euclidean distance formula (Eq. (2) from Section 2.3)
yields
D1;2�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi[X1�u2(aZ2�b)]2� [Y1�v2(aZ2�b)]2� [Z1�Z2]2
q;
which is Eq. (3) from Section 2.3 except with the dilation
mappings (Eq. (1)) replaced with their parameterized
realizations for the aligned scenario (Eq. (A5) and Eq.
(A6)). The solution for Z2 is
By letting
a�a(X1u2�bu22�Y1v2�bv2
2)
b�1�a2(u22�v2
2)
Fig. A2. Parameterized dilation formulas for the aligned camera
scenario: The smaller figure in the upper left shows the 3D scenario.
In this case the camera is aligned with the Z direction so Ro is normal
to the image plane. The larger figure on the right is a downward view
of the Y�/0 plane in space, which is defined by rays Ro and R/Y�0P :
Point P in 3D is space is positioned at (XP , YP , ZP ). Point P? is the
projection of P into the Y�/0 plane and has position (XP , 0, ZP ).
Point p is the image of P in the image plane and has location (up , vp ).
The X position of both P and P? in space is XP and is given by XP �/
auP (ZP�/b /a ), where a and b are parameters determined from the
calibration data and aup �/tan� 1(uP ), i.e. aup is the slope of R/Y�0p
relative to Ro . YP is derived similarly. See text for details.
Z2�Z1 � a(X1u2 � bu2
2 � Y1v2 � bv22) 9
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffifa(X1u2 � bu2
2 � Y1v2 � bv22) � Z1g
2 � f1 � a2(u22 � v2
2)gfX 21 � 2bX1u2 � Y 2
1 � 2bY1v2 � b2(u22 � v2
2) � D21;2 � Z2
1gq
1 � a2(u22 � v2
2):
J. Eian, R.E. Poppele / Journal of Neuroscience Methods 120 (2002) 65�/83 79
x�X 21 �2bX1u2�Y 2
1 �2bY1v2�b2(u22�v2
2)
Eq. (A7) is
Z2�Z1 � a9
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi(a� Z1)2 � b(x� D2
1;2 � Z21)
qb
: (A7)
Eq. (A5), Eq. (A6) and Eq. (A7) are the realizations of
Eq. (1) and Eq. (3) for the aligned camera scenario. They
are used to reconstruct 3D positions just as described for
the general setting in Section 2.3, but with Eq. (1)
replaced by Eq. (A5) and Eq. (A6), and with Eq. (A7) asthe solution to Eq. (3).
One problem with Eq. (A7) is that it provides two
possible Z solutions (the 9/�). We suggest two ways to
eliminate the ambiguity. The first is to know beforehand
the relative Z position of the marker in question so the
extraneous solution can be eliminated. If this is not
possible, then both solutions can be kept until one is
proven degenerate. For example, suppose there are twoZ solutions, Z2 and Z2’ , for some P2. Then after using
the dilation formulas (Eq. (A5) and Eq. (A6), or in
general Eq. (1)) there will be two possible positions for
P2: (X2, Y2, Z2) and (X’2, Y’2, Z’2). Both (X2, Y2, Z2 )
and (X’2, Y’2, Z’2 ) can be used in Eq. (A7) (or in general
Eq. (3)) to compute Z3 for another linked point P3, and
typically the incorrect position for P2 will either (1) lead
to an imaginary square root because P2 and P3 would beseparated by a distance larger than D1,2, or (2) result in a
depth position for P3 that is obviously out of range.
It is possible to contrive scenarios where both
solutions from Eq. (A7) are non-degenerate. (Consider
the circle defined by one vertex of a triangle that is
rotated about the axis defined by its other two vertices.
Now, orient the triangle so the circle projects into a line
in the image plane. Each interior point of the linerepresents two viable solutions.) In these instances, if it
is critical that the correct position of the point in
question is known, an additional observation is re-
quired.
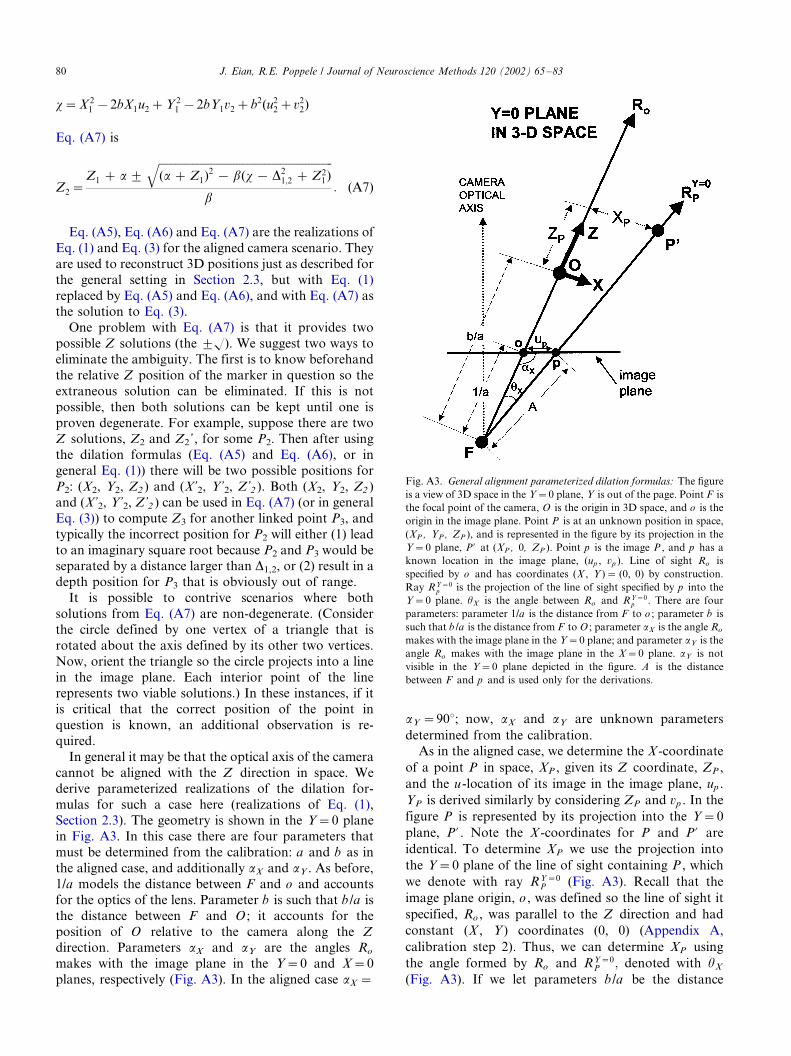
In general it may be that the optical axis of the camera
cannot be aligned with the Z direction in space. We
derive parameterized realizations of the dilation for-
mulas for such a case here (realizations of Eq. (1),Section 2.3). The geometry is shown in the Y�/0 plane
in Fig. A3. In this case there are four parameters that
must be determined from the calibration: a and b as in
the aligned case, and additionally aX and aY . As before,
1/a models the distance between F and o and accounts
for the optics of the lens. Parameter b is such that b /a is
the distance between F and O ; it accounts for the
position of O relative to the camera along the Z
direction. Parameters aX and aY are the angles Ro
makes with the image plane in the Y�/0 and X�/0
planes, respectively (Fig. A3). In the aligned case aX �/
aY �/908; now, aX and aY are unknown parameters
determined from the calibration.As in the aligned case, we determine the X -coordinate
of a point P in space, XP , given its Z coordinate, ZP ,
and the u -location of its image in the image plane, up .
YP is derived similarly by considering ZP and vp . In the
figure P is represented by its projection into the Y�/0
plane, P? . Note the X -coordinates for P and P? are
identical. To determine XP we use the projection into
the Y�/0 plane of the line of sight containing P , which
we denote with ray R/Y�0P (Fig. A3). Recall that the
image plane origin, o , was defined so the line of sight it
specified, Ro , was parallel to the Z direction and had
constant (X , Y ) coordinates (0, 0) (Appendix A,
calibration step 2). Thus, we can determine XP using
the angle formed by Ro and R/Y�0P ; denoted with uX
(Fig. A3). If we let parameters b /a be the distance
Fig. A3. General alignment parameterized dilation formulas: The figure
is a view of 3D space in the Y�/0 plane, Y is out of the page. Point F is
the focal point of the camera, O is the origin in 3D space, and o is the
origin in the image plane. Point P is at an unknown position in space,
(XP , YP , ZP ), and is represented in the figure by its projection in the
Y�/0 plane, P? at (XP , 0, ZP ). Point p is the image P , and p has a
known location in the image plane, (up , vp ). Line of sight Ro is
specified by o and has coordinates (X , Y )�/ (0, 0) by construction.
Ray R/Y�0p is the projection of the line of sight specified by p into the
Y�/0 plane. uX is the angle between Ro and R/Y�0p : There are four
parameters: parameter 1/a is the distance from F to o ; parameter b is
such that b /a is the distance from F to O ; parameter aX is the angle Ro
makes with the image plane in the Y�/0 plane; and parameter aY is the
angle Ro makes with the image plane in the X�/0 plane. aY is not
visible in the Y�/0 plane depicted in the figure. A is the distance
between F and p and is used only for the derivations.
J. Eian, R.E. Poppele / Journal of Neuroscience Methods 120 (2002) 65�/8380
between F and the spatial origin, O , then given ZP and
uX we have
XP��
b
a�ZP
�tan(uX ): (A8)
Since uX is not directly available, we determine it
using parameter aX and the location of P in the image,
up .
From the cosine law we have
A2�u2p�
�1
a
�2
�2up
1
acos(aX ); (A9)
and also
u2p�
�1
a
�2
�A2�21
aAcos(uX ): (A10)
Solving for uX in Eq. (A10) yields
uX �arccos
�u2
p ��
1
a
�2
� A2
�2
�1
a
�A
�: (A11)
Substituting Eq. (A9) for A2 in Eq. (A11) yields
uX �arccos
�1
a� 2upcos(aX )
A
�: (A12)
Eq. (A12) tells us that relative to angle uX in a righttriangle, the adjacent leg is 1/a�/ 2upcos(aX) and the
hypotenuse is A . Therefore the opposite leg is {A2�/[1/
a�/2up cos(aX)]2}1/2, and from Eq. (A12) we have
tan(uX )�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiA2 �
�1
a� 2upcos(aX )
�2s
1
a� 2upcos(aX )
: (A13)
Substituting Eq. (A9) for A2 in Eq. (A13) and
simplifying yields
tan(uX )�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiu2
p � 2u2p
1
acos(aX ) � 4u2
pcos2(aX )
s
1
a� 2upcos(aX )
: (A14)
Finally, substituting Eq. (A14) for tan(uX) in Eq. (A8)
yields
XP��
b
a�ZP
�
�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiu2
p � 2up
1
acos(aX ) � 4u2
pcos2(aX )
s
1
a� 2upcos(aX )
: (A15)
Eq. (A15) provides XP given ZP and up ; a , b , and aX
are the parameters determined from the calibration.
However, referring to Fig. A3 we see aX applies only
when p is to the right of o , which would typicallycorrespond to positive values of up . When p is to the left
of o , corresponding to negative values in up , the
derivation of XP of the same, except we must replace
aX by its complement, 180�/aX . Using cos(180�/aX)�/
�/cos(aX), and considering the sign of up for the two
cases, we have from Eq. (A15)
XP�sign(up)
�b
a�ZP
�
�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiu2
p � 2up
1
acos(aX ) � 4u2
pcos2(aX )
s
1
a� 2upcos(aX )
; (A16)
which holds for both positive and negative values of up .
We derive YP similarly by considering the geometry in
the X�/0 plane. Note that although we must replace
parameter aX with aY when considering YP , parameters
a and b do not change because they run along Ro , whichis contained in both planes Y�/0 and X�/0 and
therefore is unaffected by either projection. The result
for YP is
YP�sign(vp)
�b
a�ZP
�
�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiv2
p � 2vp
1
acos(aY ) � 4v2
pcos2(aY )
s
1
a� 2vpcos(aY )
: (A17)
Eq. (A16) and Eq. (A17) are the parameterizedrealizations of the general dilation formulas described
in Section 2.3 (Eq. (1)). Their parameters are determined
from the calibration data as described in Appendix A,
calibration step 5. Once this is done the realizations are
used in place of Eq. (1) from Section 2.3, and
reconstruction is carried out as described in Section 2.3.
Note that when parameters aX �/aY �/908 as in the
aligned case, the cosine terms in Eq. (A16) and Eq.(A17) are zero, and Eq. (A16) and Eq. (A17) reduce to
the dilation formulas derived for the aligned case, Eq.
(A5) and Eq. (A6), respectively.
J. Eian, R.E. Poppele / Journal of Neuroscience Methods 120 (2002) 65�/83 81

Appendix C: Seeding marker Z position
We described 3D reconstruction under the assump-
tion that the Z position of a seeding marker was known
in every image. Here we describe two methods for
determining that Z position*/and also a scenario where
the seeding marker is not even required.
The first method is to orient the spatial coordinate
system so the Z coordinate of one marker is known.
This marker is the seeding marker. For example, when a
marker remains within a plane or is affixed to an
external device, it may be possible to orient the Z
direction so the marker either maintains a constant Z
position or moves along the Z direction in a known
fashion. To determine the Z position it is necessary to
know the distance along Z between one of the calibra-
tion grid positions and the marker during imaging.
Then, if we define the aforementioned grid position as
acquired with the grid at Z�/0, the Z position of the
marker is just its Z distance from the Z�/0 grid
position. A fixed point in space, with respect to which
the Z position of the marker during imaging is known,
can be used to link the Z positions of the marker and the
calibration grid (see Section 3 for an example).In general it may be that rather than the Z coordi-
nate, the X or Y coordinate of a marker is known. Such
a marker can still serve as the seeding marker, but there
are added complications. Its Z coordinate can be
determined from the triplet (u , v , X ) or (u , v , Y ), where
u and v are its location in the images, and X or Y is
known in space. To determine Z , the discussion of the
dilation formulas (Section 2.3) is applied with Z
replaced by either X or Y , whichever is the known
coordinate. In this case one is computing (Y , Z ) from
(u , v , X ), or (X , Z ) from (u , v , Y) , rather than (X , Y )
from (u , v , Z ). Note that when the X (Y ) coordinate is
the known coordinate, the Z coordinate cannot be
computed whenever the seeding marker is in the X�/0
(Y�/0) plane because X�/0 (Y�/0) does not uniquely
define Z (consider Fig. 2).The second method for determining a seeding Z
position uses only object images and distances between
linked markers. In contrast to the first method, connec-
tions between the seeding marker Z positions and
calibration grid Z positions are not required. Any of
the calibration grid images may be assigned as acquired
with the grid at Z�/0 (Appendix A), and the Z position
of the seeding marker can still be determined from the
images alone. In this case the Z direction should be
aligned with the camera’s optical axis if possible so the
dilation formula realizations in Eq. (A5) and Eq. (A6)
apply (Appendix B).
Three markers that form a triangle of known linkage
distances are required. That is, for markers P1, P2, and
P3, the distances between P1 and P2, D1,2, P2 and P3, D2,3
and P3 and P1, D3,1, must be known (i.e. measured prior
to imaging). We use Eq. (2) three times, once for each of
the three linkages. We substitute Eq. (A5) for all Xj and
Eq. (A6) for all Yj , 10/j 0/3, to arrive at a system of
three equations and three unknowns. The unknowns are
the Zj :
The uj and vj are the coordinates of the images of the
Pj , and here a and b are the dilation formula parameters
determined from the calibration (Appendix A). From
Eq. (A7) we have the solution for Z1 in the first equation
in terms of Z2. Similarly, Eq. (A7) also provides the
solution for Z3 in the second equation in terms of Z2.
The solutions for Z1 and Z3 are substituted in the third
equation, which can then be solved numerically for the
single unknown, Z2. If multiple solutions exist, the
extraneous depths could be eliminated by repeating the
procedure with additional triplets of markers that have
only the marker in question in common. Miller et al.
(1980) described another method for determining the 3D
position of three points from a single 2D image. They
also provide suggestions for numerical solution meth-
ods.
Finally, we describe a scenario where there is no need
to know a seeding marker Z position. This occurs when
the distance between the camera and the object is large
relative to the depth of the object-imaging region. In this
case, the location of the image of a marker does not
change as its Z position varies. In essence, the camera
lines of sight are parallel within the object-imaging
region and the need for the dilation formulas is
eliminated. The 3D reconstruction problem reduces to
D1;2�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi[u1(aZ1�b)�u2(aZ2�b)]2� [v1(aZ1�b)�v2(aZ2�b)]2� [Z1�Z2]2
qD2;3�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi[u2(aZ2�b)�u3(aZ3�b)]2� [v2(aZ2�b)�v3(aZ3�b)]2� [Z2�Z3]2
qD3;1�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi[u3(aZ3�b)�u1(aZ1�b)]2� [v3(aZ3�b)�v1(aZ1�b)]2� [Z3�Z1]2
q:
J. Eian, R.E. Poppele / Journal of Neuroscience Methods 120 (2002) 65�/8382

a non-perspective 3D distance problem. The X and Y
components of the dilation formulas become X�/DX (u ,
v , Z )�/cu and Y�/DY(u , v , Z )�/cv , where c is a
constant (determined from the calibration data) thatconverts video frame lengths into spatial lengths,
independent of Z (depth).
In this case, both a seeding marker, call it P1, and its
Z coordinate, Z1, can be selected arbitrarily. The Z
positions of all the reconstructed markers are given with
respect to Z1. Using the location of the seeding marker
in the image plane, (u1, v1), we have X1�/cu1 and Y1�/
cv1, therefore the 3D coordinates of the seeding markerare (X1, Y1, Z1)�/ (cu1, cv1, Z1). For any marker linked
to P1 by a known distance, D1,2, we use its image
location, (u2, v2), to replace X2 and Y2 in Eq. (2) with
X2�/cu2 and Y2�/cv2:
D1;2�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi(X1�cu2)2�(Y1�cv2)2�(Z1�Z2)2
q:
Above, Z2 is the only unknown. The solution for Z2 is
Z2�Z19ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiD2
1;2�X 21 �2cX1u2�c2u2
2�Y 21 �2cY1v2�c2v2
2:q
(A18)
The coordinates of the linked marker are (X2, Y2,Z2)�/ (cu2, cv2, Z2). Note that Eq. (A18) is Eq. (A7)
from Appendix B with parameter a set to 0 (i.e. camera
optic ignored) and parameter b replaced by c .
References
Abdel-Aziz YI, Karara HM. Direct linear transformation from
comparator coordinates into object space coordinates in close-
range photogrammetry. Proceedings of the ASP Symposium on
Close-Range Photogrammetry 1971;1�/19.
Berstein N. Untersuching der Korperbewegungen and Korperstellun-
gen im Raum mittens Spugelaufnahmen. Arbeitsphysiologie
1930;3:3�/30.
Bosco G, Poppele RE, Eian J. Reference frames for spinal propriocep-
tion: limb endpoint based or joint-level based? J Neurophysiol
2000;83:2931�/5.
Bosco G, Poppele RE. Low sensitivity of dorsal spinocerebellar
neurons to limb movement speed. Exp Brain Res 1999;125:313�/22.
Gard SA, Knox EH, Childress DS. Two-dimensional representation of
three-dimensional pelvic motion during human walking: an exam-
ple of how projections can be misleading. J Biomech
1996;29(10):1387�/91.
Marzan GT, Karara HM. A computer program for direct linear
transformation solution of the colinearity condition and some
applications of it. Proceedings of the Symposium on Close-Range
Photogrammetric Systems 1975;420�/76.
Miller NR, Shapiro R, McLaughlin TM. A technique for obtaining
spatial kinematic parameters of segments of biomechanical systems
from cinematographic data. J Biomech 1980;13:535�/47.
Shapiro R. An overview of techniques for three-dimensional cinema-
tography. Proceedings of the Biomechanic Symposium Indiana
University October 26�/28 1980;62�/77.
Smith GA, Fewster JB. Two-dimensional panning algorithm for wide
field planar motion. Paper presented at the XVth Congress of the
International Society of Biomechanics. Finland: Jyvaskyla; July
1995.
Yu B, Koh TJ, Hay JG. A panning DLT procedure for three-
dimensional videography. J Biomech 1993;26(6):741�/51.
J. Eian, R.E. Poppele / Journal of Neuroscience Methods 120 (2002) 65�/83 83