a klinogonális axonometria alapösszefüggéseiről és azok ... klinogonalis axonometria... · a...
TRANSCRIPT
A klinogonális axonometria alapösszefüggéseiről és azok alkalmazásáról Bevezetés Előző dolgozatunkban – címe: Az orthogonális axonometria alapösszefüggéseiről, illetve azok alkalmazásáról, jele ( ED ) – bemutattuk az egyik speciális ábrázolási módot, elméleti és gyakorlati nézőpontokból is, a magunk sajátos módján. Most ugyanezt tesszük a ferde(szögű) / klinogonális axonometrikus ábrázolási móddal is. A már több mint két évtizede felírt egyenleteink nem láthatók más szerzőknél, kivéve a rövidülések négyzetösszegére vonatkozó „tételünket”. Ezt a szép és könnyen igazol-ható tételt azelőtt is, azután is felfedezték már mások is. Így van ez. E dolgozat terjedelme meglepő lehet; úgy láttuk, hogy fényűzés lenne lemondani az egyes részek összefüggéseinek megvilágításáról, a terjedelem korlátozása okán. Ugyanis elmondhatjuk, hogy szinte minden ábrázolással foglalkozó tanulónak, szakembernek vannak használható ismeretei az axonometriáról, azonban az is tény, hogy csak kevesen lépnek túl egy ismert recept alkalmazásán. Meglepő, ha egy – máskülönben képzett – műszaki szakember problémája ábrázolási részéhez látva az axonometriát egy, a tanul-mányai során megismert speciális tengelykereszttel azonosítja. Láttunk ilyet. Úgy véljük, hogy az ízlésben az analitikus kifejtés - módhoz közelebb álló műszakiak számára nem lesznek teljesen érdektelenek az alábbiak. Ejtsünk itt néhány szót a számítógépesítés hatásairól is. Az elmúlt két évtizedben tapasztalt ez irányú fejlődés egyik mellékhatása, hogy a felhasználók jórészt leszoktak az elméleti eredmények „gyalogos” alkalmazásáról, így jelentősen eltávolodtak az alkal-mazott módszerek elméletétől is. Nem véletlen, hogy még mindig nem dobták sutba az Ábrázoló Geometriát, mint tantárgyat, ám tény, hogy a nagyon sok programfejlesztői munkaórát tartalmazó, elterjedtségük miatt viszonylag olcsó szoftverek megléte – paradox módon – többnyire nem támogatja az elméleti alapok megértetésén fáradozó tanár munkáját. Gondoljunk bele: ha a „tanulónak” van egy mindentudó szoftvere, akkor rábízza magát a szoftver alkotóinak tudására: megbízik bennük. Ez az ára, hogy nem kell magának is elsajátítania azt a rengeteg ismeretet. Hát nem megéri ez, a hülyének is?!? Egy másik zavaró körülmény: a szakirodalom állapota. Korábban talán már céloztunk rá, hogy van egy bizonyos értelemben vett kirekesztés: az elutasító érveket persze nem nehéz szakmainak láttatni. Nyilván nem véletlen, hogy e dolgozat a szerzője honlapján jelenik meg. A mondandónk kifejtése hasonlít az ( ED ) - belihez: igyekszünk rávenni az Olvasót, hogy kövessen minket a felfedezésben; cserébe a részletszámításokat is jórészt elvé-gezzük helyette. Ezt az írást, akárcsak az előzőt is, inkább a haladó Olvasónak ajánljuk. Bár az alkal-mazott matematika nem túl magas színvonalú, de biztos kezelését inkább csak tőlük várhatjuk el. Szóval főként mérnökök és tanárok érdeklődésére tarthat számot. A téma kifejtése sok ábra rajzolását igényli. Bár ez időrabló, sokszor nehézkes munka, mégis bíztatjuk az Olvasót, hogy az alábbiak mellé / helyett készítse el a saját megfelelő ábráit! Hasonlóképpen ajánlott a levezetések egyéni újraszámítása is!
2
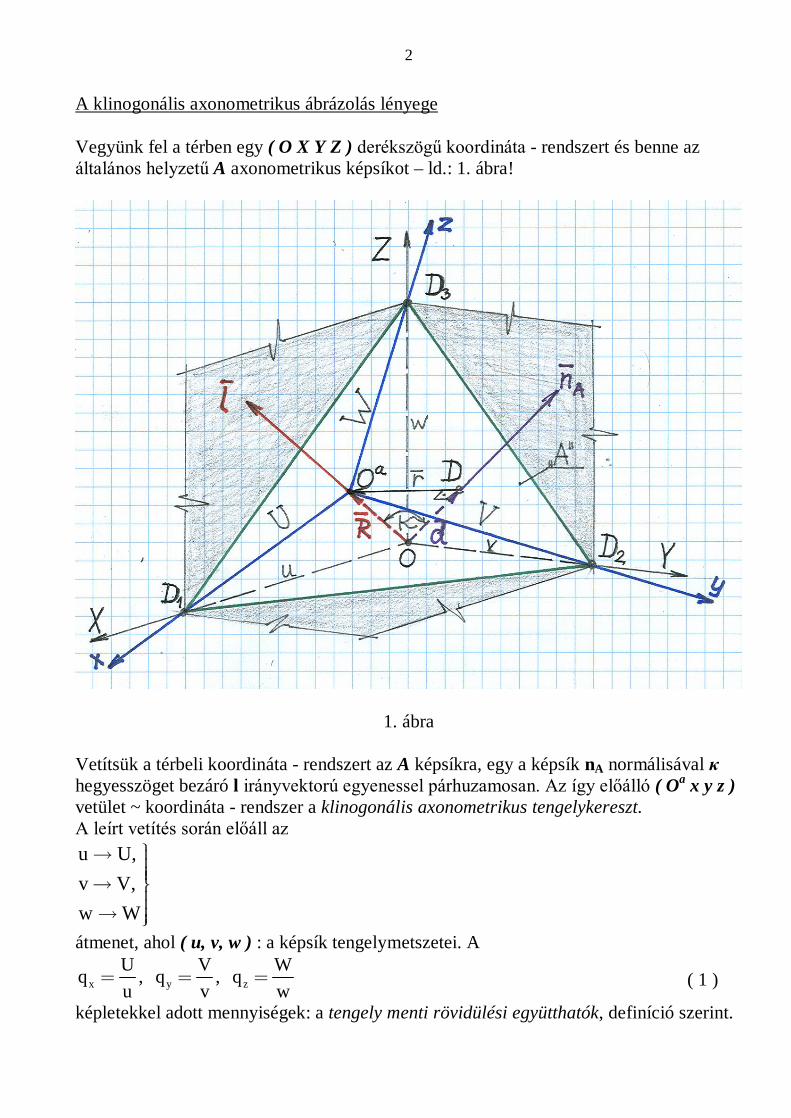
A klinogonális axonometrikus ábrázolás lényege Vegyünk fel a térben egy ( O X Y Z ) derékszögű koordináta - rendszert és benne az általános helyzetű A axonometrikus képsíkot – ld.: 1. ábra!
1. ábra Vetítsük a térbeli koordináta - rendszert az A képsíkra, egy a képsík nA normálisával κ hegyesszöget bezáró l irányvektorú egyenessel párhuzamosan. Az így előálló ( Oa x y z ) vetület ~ koordináta - rendszer a klinogonális axonometrikus tengelykereszt. A leírt vetítés során előáll az u U,v V,w W
átmenet, ahol ( u, v, w ) : a képsík tengelymetszetei. A
x y zU V Wq , q , qu v w
( 1 )
képletekkel adott mennyiségek: a tengely menti rövidülési együtthatók, definíció szerint.

3
Megjegyzések: M1. A „rövidülési” együttható elnevezés ferde axonometriában néha megtévesztő lehet, amikor is egy szakasz vetülete nem rövidebb a vetített szakasznál. Ennek ellenére mara-dunk a bevett szóhasználatnál. M2. Lényeges, hogy a fent megnevezett κ szögre fennáll, hogy 0 < < 90 . ( κ ) Ellenkező esetekben: a.) κ = 0: az orth. ax. tengelykereszt állt elő; b.) κ = 90°: a vetítősugarak egyenesei egy a képsíkkal párhuzamos síkban fekszenek, így nem képződik a kívánt vetület. A ( κ ) reláció világítja meg a „ferde” axonometria elne-vezés eredetét: tudniillik a vetítő egyenesek a képsíkhoz, illetve annak normálisához képest ferde irányúak. Egy tetszőleges P ( X, Y, Z ) térbeli pont ferde axonometrikus képe ezek után úgy állítható elő, hogy e pontot l - lel párhuzamos vetítősugárral A - ra vetítjük. Az így kapott pont: a K képpont; v.ö.: ( ED / 2. ábra )! Az axonometrikus ábrázolás szabadsági fokairól A kérdést úgy világítjuk meg, hogy megvizsgáljuk: hány darab független adatot kell megadnunk / felvennünk, hogy létrehozhassuk a fentebb leírt vetületképzési módot. Első lépésként felvettük az A axonometrikus képsíkot, melyet nA normálvektorával jellemzünk – ld.: 2 / a ábra!
2. ábra A sík normálvektorának iránykoszinuszai között fennáll az ismert

4
2 2 2X Y Zcos cos cos 1 ( δ )
összefüggés. Ebből látható, hogy csak két irányszög – pl.: X Y( , ) − vehető fel szabadon. Második lépésként felvettük a vetítő egyenesek l irányvektorát – ld.: 2 / b ábra! Ennek irányszögei között fennáll a
2 2 2X Y Zcos cos cos 1 ( ω )
összefüggés, tehát két irányszög – pl.: X Y( , ) − megadásával jellemezhető a vetítő egyenesek térbeli helyzete. Most gondoljuk végig, hogy milyen hatással van az axonometrikus tengelykereszt állására a d OD távolság! Az eredmény: semmi! Ugyanis a 2 / a ábra szerinti nA normálvektor állandósága esetén a különböző d képsík - távolságok mellett előálló ( Oa x y z ) axonometrikus tengelykeresztek párhuzamosak egymással, így feladatunk szempontjából nem tudunk különbséget tenni közöttük. A d képsík - távolság lényegtelen adat mivoltából következően úgy is fogalmazhatunk, hogy a D1D2D3 nyomháromszög valamelyik oldalának hosszát tetszőlegesen felvehetjük. Ezek után kimondhatjuk, hogy: a ferde axonometria 4 - paraméteres ábrázolási mód. Ezek a paraméterek lehetnek pl. a fenti X Y X Y, , , térbeli szög - adatok is, de lehetnek az axonometrikus képsíkon fellehető adatok is. A következőkben élni fogunk a paraméter - választás ezen a szabadságával. Megjegyezzük, hogy merőleges axonometria esetén a képsík helyzetének megadásával ( 2 adat! ) egyúttal a vetítés irányát – a képsík normálisának irányát – is megadtuk, így ott marad a 2 db szabad paraméter, vagyis: a merőleges axonometria 2 - paraméteres ábrázolási mód. Három tétel az axononometriáról Értelmezés: Az axonometrikus képsík általános helyzetű, ha tengelymetszeteire fennáll, hogy
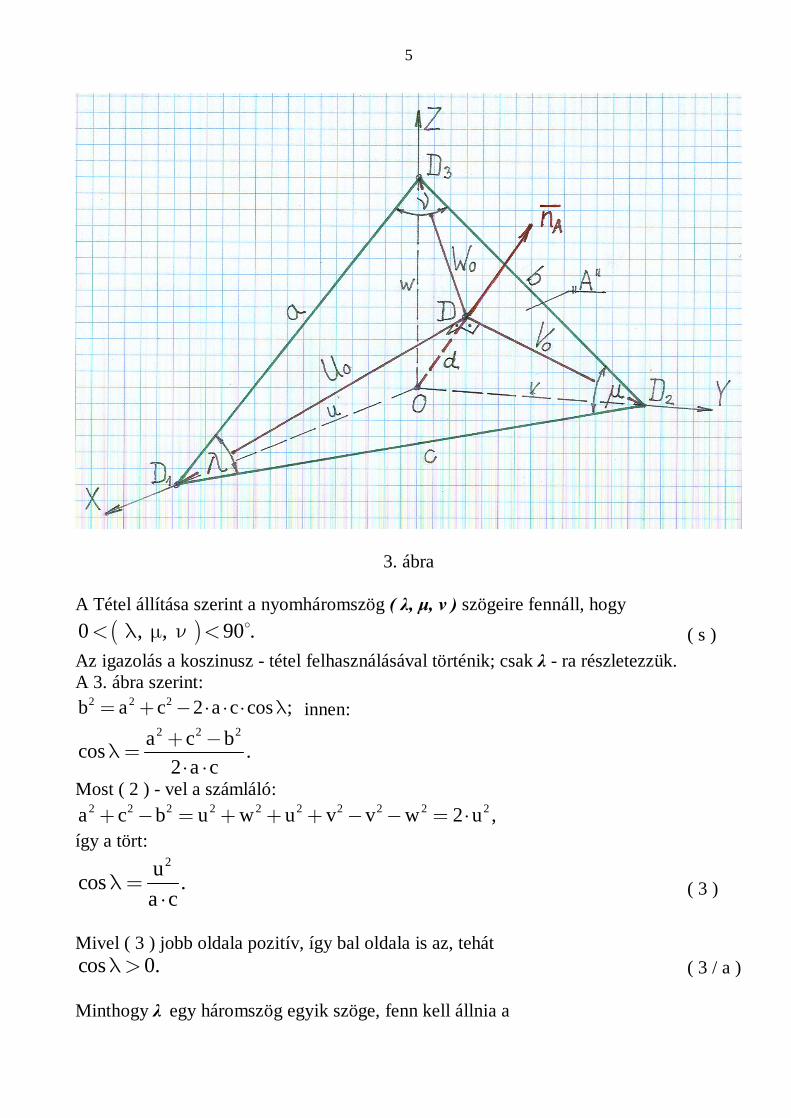
0 u, v, w . ( t ) 1. Tétel: Az általános helyzetű axonometrikus képsíkhoz tartozó nyomháromszög: hegyesszögű. Most tekintsük a 3. ábrát! Az ábra egy általános képsík - felvételi esetet mutat. Az ( u, v, w ) tengelymetszetek A - ra vett merőleges vetületei: ( U0 , V0 , W0 ). A D1D2D3 nyomháromszög létezik – azaz nem elfajuló –, tekintettel az
2 2 2 2 2 2 2 2 2a u w , b v w , c u v ( 2 ) és ( t ) kapcsolatokra.
5
3. ábra A Tétel állítása szerint a nyomháromszög ( λ, μ, ν ) szögeire fennáll, hogy
0 , , 90 . ( s )
Az igazolás a koszinusz - tétel felhasználásával történik; csak λ - ra részletezzük. A 3. ábra szerint:
2 2 2b a c 2 a c cos ; innen: 2 2 2a c bcos .
2 a c
Most ( 2 ) - vel a számláló: 2 2 2 2 2 2 2 2 2 2a c b u w u v v w 2 u ,
így a tört: 2ucos .
a c
( 3 )
Mivel ( 3 ) jobb oldala pozitív, így bal oldala is az, tehát cos 0. ( 3 / a ) Minthogy λ egy háromszög egyik szöge, fenn kell állnia a
6
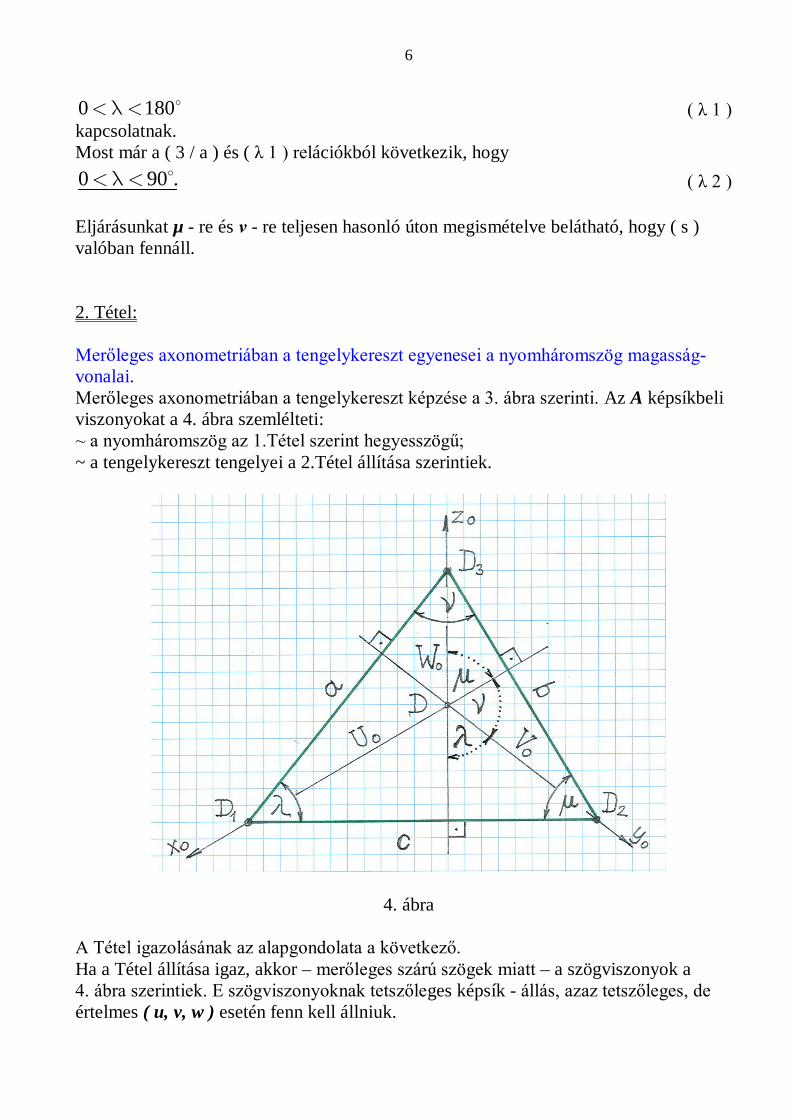
0 180 ( λ 1 ) kapcsolatnak. Most már a ( 3 / a ) és ( λ 1 ) relációkból következik, hogy 0 90 . ( λ 2 ) Eljárásunkat µ - re és ν - re teljesen hasonló úton megismételve belátható, hogy ( s ) valóban fennáll. 2. Tétel: Merőleges axonometriában a tengelykereszt egyenesei a nyomháromszög magasság-vonalai. Merőleges axonometriában a tengelykereszt képzése a 3. ábra szerinti. Az A képsíkbeli viszonyokat a 4. ábra szemlélteti: ~ a nyomháromszög az 1.Tétel szerint hegyesszögű; ~ a tengelykereszt tengelyei a 2.Tétel állítása szerintiek.
4. ábra A Tétel igazolásának az alapgondolata a következő. Ha a Tétel állítása igaz, akkor – merőleges szárú szögek miatt – a szögviszonyok a 4. ábra szerintiek. E szögviszonyoknak tetszőleges képsík - állás, azaz tetszőleges, de értelmes ( u, v, w ) esetén fenn kell állniuk.

7
Más szavakkal: a térbeli koordináta - tengelyek A - ra vett merőleges vetületei tetszőleges képsík - állás esetén is a nyomháromszög magasságvonalaiként adódnak. Az analitikus igazolás például az alábbi módon történhet. A 4. ábra D3DD2 háromszögéből koszinusz - tétellel – itt használjuk ki a 2. Tételből következő szögviszonyokat – :
2 2 20 0 0 0b V W 2 V W cos ; ( b 1 )
mivel 180 és cos 180 cos , így ( b 1 ) a 2 2 2
0 0 0 0b V W 2 V W cos ( b 2 ) alakot ölti. A 3. ábrából következően:
2 2 2 2 2 20 0V v d , W w d , így ezekkel ( b 2 ) így alakul:
2 2 2 2 2 2 2 2 2b v d w d 2 v d w d cos . ( b 3 )
Most ( b 3 ) - mal és ( 2 ) második egyenletével:
2 2 2 2 2 2 2 2 2 2v w v d w d 2 v d w d cos .
Rendezés után:
2 2 2 2 2d v d w d cos . ( b 4 )
Majd ( 3 ) és ( b 4 ) - gyel:
2
2 2 2 2 2 ud v d w d .a c
( b 5 )
Ezután ( b 5 ) és ( 2 ) - vel, egyszerű átalakítások után a 2 2 2 2v w v w1 1 1 1
u u d d
( b )
egyenletre jutunk. Utóbbinál az azonosságjel arra figyelmeztet, hogy ha a 2. Tétel igaz, akkor ( b ) - nek tetszőleges ( u, v, w ) esetén fenn kell állnia, tehát azonosságnak kell lennie. Most ( E D / 2 – 7) - tel:
2 2 2 2
1 1 1 1 .d u v w
( d )
Majd helyettesítsük ( b ) jobb oldalába ( d ) - t: 2 2 2 2 2 2 2 2v v w w v w v wJ(b) 1.
u w u v u u u u
Most fejtsük ki ( b ) bal oldalát: 2 2 2 2 2 2v w v w v wB(b) 1 1 1 .
u u u u u u

8
Megállapíthatjuk, hogy B(b) = J(b), tehát a ( b ) egyenlet valóban azonosság. Ebből következik, hogy a szögviszonyok valóban a 4. ábra szerintiek, vagyis a 2. Tétel igaz. 3. Tétel: Klinogonális axonometriában a qx, qy, qz rövidülési együtthatókra fennáll, hogy qx
2 + qy2 + qz
2 = 2 + tg2κ. ( Q ) Az igazoláshoz tekintsük az 1. ábrát is! Koszinusz - tétellel az OOaD1 háromszögből:
2 2 2U u R 2 u R cos u,R .
Azonban RR cos u,R X , így ezzel is 2 2 2
RU u 2 u X R . Teljesen hasonló módon adódik a másik két egyenlet is, melyekkel együtt:
2 2 2R
2 2 2R
2 2 2R
U u 2 u X R ,
V v 2 v Y R ,
W w 2 w Z R .
( F 1 )
Osszuk végig ( F 1 ) egyenleteit rendre 2 2 2u , v , w - tel , és alkalmazzuk ( 1 ) - et! 2 2
2 Rx 2 2
2 22 Ry 2 2
2 22 Rz 2 2
XU Rq 1 2 ,u u u
YV Rq 1 2 ,v v v
ZW Rq 1 2 .w w w
( F 2 )
Adjuk össze ( F 2 ) egyenleteit!
2 2 2 2R R Rx y z 2 2 2
X Y Z 1 1 1q q q 3 2 R .u v w u v w
( F 3 )
( F 3 ) első zárójeles kifejezése – a sík tengelymetszetes egyenletének megfelelően – : R R RX Y Z 1;
u v w
( F 3 ) második zárójeles kifejezése a ( d ) egyenlet szerint:
2 2 2 2
1 1 1 1 ,u v w d
így ( F 3 ) más alakban:

9
22 2 2x y z 2
Rq q q 1 .d
( F 4 )
Ám az 1. ábrára is tekintettel: 2 2 2
22 2 2
R 1 sin cos 1 tg ,d cos cos
( F 5 )
így ( F 4 ) és ( F 5 ) szerint: 2 2 2 2 2x y zq q q 1 1 tg 2 tg ,
vagyis a 3. Tétel állítása: ( Q ) adódik. Következmény: A ( Q ) egyenletben κ = 0 - t véve kapjuk a merőleges axonometriában érvényes
2 2 2x,0 y,0 z,0q q q 2 ( Q0 )
eredményt – v.ö.: ( E D / 6 – 9 )! Megjegyzések: M1. Az ( F 2 ) képletekkel tudjuk előállítani a rövidülési együtthatók értékét az ún. elfajuló esetekben; pl.: u esetén:
22 2 Rx x,u 2u u
X Rlim q q lim 1 2 1,u u
innen x,uq 1, ( qx,u )
hiszen R és így XR is véges. M2. Már korábban megjegyeztük, hogy ferde axonometriában a „rövidülési” együttható kifejezés megtévesztő lehet. Ezt a ( Q ) kifejezés alapján rögtön megvilágítjuk.
a.) Ha pl.: x y zq q q 1 − ez esetben κ = 45° – akkor az axonometrikus tengelykereszt tengelyei mentén a „valódi” méreteket hordjuk fel, az axonometrikus kép előállításakor. Vagyis ekkor nincs – szó szerinti értelemben vett – rövidülés.
b.) Ha pl.: x yq q 1, akkor zq tg , 45 esetén zq 1, így a vele való szorzás nem „rövidülést”, hanem „hosszabbulást” valósít meg. Ilyen értelemben lehet félrevezető az említett szóhasználat.
M3. Látjuk, hogy a ferde axonometria esetében a rövidülések négyzetösszegének van véges alsó, de nincs felső korlátja – v. ö.: ( κ )! M4. Az 1. és 2. Tételt ( ED ) - ben a szakirodalomra hivatkozva alkalmaztuk.
10
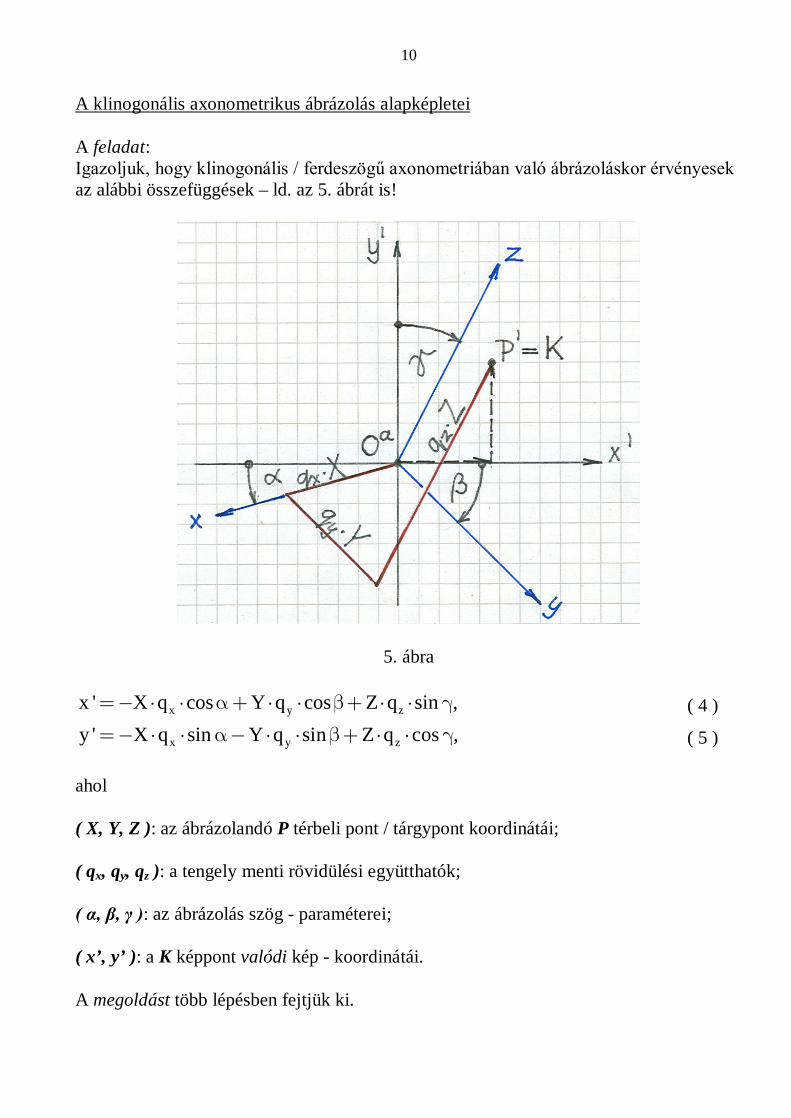
A klinogonális axonometrikus ábrázolás alapképletei A feladat: Igazoljuk, hogy klinogonális / ferdeszögű axonometriában való ábrázoláskor érvényesek az alábbi összefüggések – ld. az 5. ábrát is!
5. ábra
x y zx ' X q cos Y q cos Z q sin , ( 4 )
x y zy ' X q sin Y q sin Z q cos , ( 5 ) ahol ( X, Y, Z ): az ábrázolandó P térbeli pont / tárgypont koordinátái; ( qx, qy, qz ): a tengely menti rövidülési együtthatók; ( α, β, γ ): az ábrázolás szög - paraméterei; ( x’, y’ ): a K képpont valódi kép - koordinátái. A megoldást több lépésben fejtjük ki.

11
1.) A ( 4 ) és ( 5 ) ábrázolási képletek értelmezése, belátása a szemlélet alapján Az 5. ábrán két koordináta - rendszerben is felírtuk a P tárgypont ferde - párhuzamos vetítése során előállt K képpontot: ~ az ( Oa x y z ) axonometrikus tengelykereszt ferdeszögű koordináta - rendszerében: P’ = P’ ( qx X , qy Y , qz Z ) ; ~ az ( Oa x’ y’ ) derékszögű ábrázolási kép ~ koordináta - rendszerben: K = K ( x’, y’ ). A ( 4 ) képlet a piros töröttvonal x’ tengelyre vett merőleges vetületének az előjeles hosz-szát adja meg; az ( 5 ) képlet a piros töröttvonal y’ tengelyre vett merőleges vetületének az előjeles hosszát adja meg. Ez nem igényel további magyarázatot. Amikor hagyomá-nyos módon / kézzel rajzolunk, akkor az axonometrikus tengelyek mentén felhordjuk a ( qx X , qy Y , qz Z ) szakaszokat: Oa - ból P’ - be jutunk. Amikor számítjuk a képkoordi-nátákat, akkor ennek eredményét a fekete szaggatott vonal mentén hordjuk fel: O a - ból K - ba jutunk. Tudjuk – pl. rajzi előtanulmányokból, az ( ED ) - vel való analógiából –, hogy az axonometrikus képpont előállításának feladatát ( 4 ) és ( 5 ) formulázzák meg.
Ezek az egyenletek az 5. ábra alapján írhatók fel, melynek létrejötte a 6. ábrán követhető.
6. ábra
12
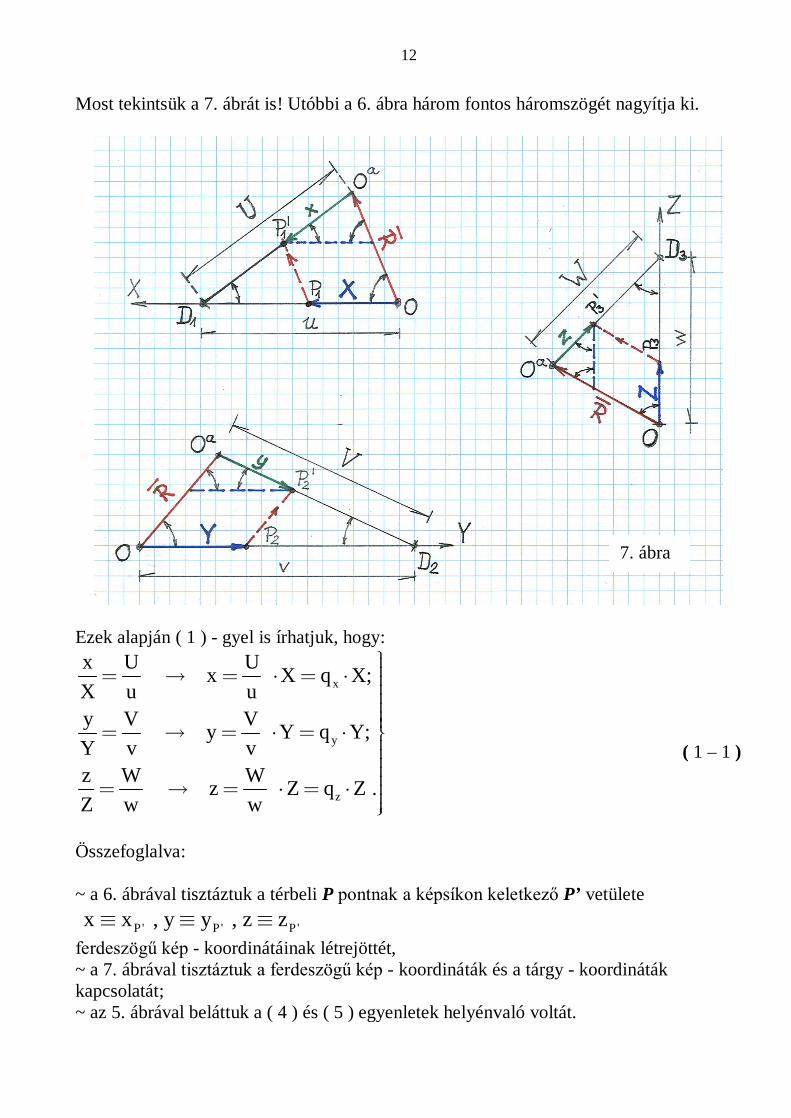
Most tekintsük a 7. ábrát is! Utóbbi a 6. ábra három fontos háromszögét nagyítja ki.
Ezek alapján ( 1 ) - gyel is írhatjuk, hogy:
x
y
z
x U U x X q X;X u uy V V y Y q Y;Y v vz W W z Z q Z .Z w w
( 1 – 1 )
Összefoglalva: ~ a 6. ábrával tisztáztuk a térbeli P pontnak a képsíkon keletkező P’ vetülete P' P ' P 'x x , y y , z z ferdeszögű kép - koordinátáinak létrejöttét, ~ a 7. ábrával tisztáztuk a ferdeszögű kép - koordináták és a tárgy - koordináták kapcsolatát; ~ az 5. ábrával beláttuk a ( 4 ) és ( 5 ) egyenletek helyénvaló voltát.
7. ábra

13
2.) A térbeli vetítési összefüggések felírása, az egyenletek kifejtése Az ( ED / 1 – 7, 8 ) képletek szerint:
2x ' ,
0
1 2
r r u ×uu u ×u ( 2 – 1 )
1
2 1
y ' .
0r r u ×uu u ×u ( 2 – 2 )
Most megváltoztatjuk a szakirodalomból vett jelöléseket, a saját jelölésekre:
1 2; ; ; ; . 00 x' y'r p r R u e u e u l ( v )
Most ( 2 – 1 ), ( 2 – 2 ) és ( v ) - vel:
x ' ,
0y'
0x' y'
p R e ×l
l e ×e ( 2 – 3 )
y ' .
0x'
0y' x'
p R e ×l
l e ×e ( 2 – 4 )
Felhasználva, hogy
, 0x' y' y' x'e ×e e ×e n ( 2 – 5 )
( 2 – 3 ), ( 2 – 4 ), ( 2 – 5 ) - tel kapjuk, hogy
x ' ,
0y'
0 0
p R e ×ll n ( 2 – 6 )
y ' .
0x'
0 0
p R e ×ll n ( 2 – 7 )
Az 1. ábra szerint:
R , 0R l ( 2 – 8 ) így fennállnak az
0,
0
0y'
0x'
R e ×l
R e ×l ( 2 – 9 )
összefüggések. Most ( 2 – 6 ), ( 2 – 7 ), ( 2 – 9 ) - cel:

14
x ' ,
0y'
0 0
p e × ll n ( 2 – 10 )
y ' .
0x'
0 0
p e ×ll n ( 2 – 11 )
Megjegyezzük, hogy utóbbi képletek nevezőjében – ld.: az 1. ábrát is! – :
cos . 0 0l n ( 2 – 12 ) A „régi” egységvektorok ( ED / 2 – 5, 12, 14 ) szerint:
d d d ,u v w
0n i j k ( 2 – 13 )
x ' 2 2 2 2
u v ,u v u v
e i j ( 2 – 14 )
y' 2 2
d v u u v . w w v uu v
e i j k ( 2 – 15 )
A vetítő egyenesek „új” egységvektora – ld. a 2 / b ábrát is! – :
X Y Zcos cos cos . 0l i j k ( 2 – 16 ) Először részletezzük ( 2 – 12 ) - t! ( 2 – 12 ), ( 2 – 13 ), ( 2 – 16 ) - tal:
X Y Z
X Y Z
d d dcos cos cosu v w
d d d cos cos cos ,u v w
0 0l n i j k i j k
tehát:
X Y Zd d dcos cos cos .u v w
0 0l n ( 2 – 17 )
Most az 1. ábráról:
dcos ,R
( 2 – 18 )
így ( 2 – 12 ), ( 2 – 17 ) és ( 2 – 18 ) - cal:

15
X Y Zd d d dcos cos cos ,u v w R ( 2 – 19 )
innen:
X Y Z
1R .cos cos cosu v w
( 2 – 20 )
Ezután ( 2 – 10 ) - hez, ( 2 – 15 ) és ( 2 – 16 ) - tal:
X Y Z2 2
d v u u v cos cos cos ;w w v uu v
0y'e × l i j k × i j k
a kijelölt műveletek elvégzése után:
Z Y Z X
2 2
X Y
u u v v u vcos cos cos cosw v u w v ud .u vu v cos cosw w
0y'
i je × l
k
( 2 – 21 ) Most tekintettel a
X Y Z p i j k ( 2 – 22 ) kifejezésre, ( 2 – 10 ) számlálója így alakul:
Z Y
Z X2 2
X Y
u u vX cos cosw v u
d v u vY cos cos ;w v uu vu vZ cos cosw w
0y'p e ×l
( 2 – 23 )
majd a ( 2 – 10 ), ( 2 – 12 ), ( 2 – 18 ), ( 2 – 23 ) képletekkel:

16
Z Y
Z X2 2
X Y
u u vX cos cosw v u
R d v u vx ' Y cos cosd w v uu v
u vZ cos cosw w
0y'
0 0
p e ×ll n
Z Y
Z X2 2
X Y
u u vX R cos R cosw v u
1 v u v Y R cos R cos .w v uu vu vZ R cos R cosw w
( 2 – 24 ) Mivelhogy R vetületei a térbeli koordináta - tengelyekre:
R X
R Y
R Z
X R cos ,Y R cos ,Z R cos ,
, ( 2 – 25 )
így ( 1 – 24 ) és ( 1 – 25 ) - tel:
R R
R R2 2
R R
u u vX Z Yw v u
1 v u vx ' Y Z X .w v uu vu vZ X Yw w
( 2 – 26 )
Most ( 2 – 11 ) - hez:

17
X Y Z2 2
1 u v cos cos cos ;u v
0x'e × l i j × i j k
részletszámítások után:
Z Z Y X2 2
1 v cos u cos u cos v cos .u v
0
x'e ×l i j k
( 2 – 27 ) majd ( 2 – 22 ) és ( 2 – 27 ) - tel:
Z Z Y X2 2
Z Z Y X2 2
1X Y Z v cos u cos u cos v cosu v
1 X v cos Y u cos Z u cos v cos .u v
0x'p e × l
i j k i j k
( 2 – 28 ) Ezután a ( 2 – 11 ), ( 2 – 12 ), ( 2 – 18 ), ( 2 – 25 ), (2– 28 ) képletekkel:
Z Z Y X2 2
Z Z Y X2 2
R R R R2 2
1 Ry ' X v cos Y u cos Z u cos v cosdu v
1 1 X v R cos Y u R cos Z u R cos v R cosdu v
1 1 X v Z Y u Z Z u Y v X ,du v
tehát:
R R R R2 2
1 1y ' X v Z Y u Z Z u Y v X .du v
( 2 – 29 )
3.) A ( 2 – 26 ), ( 2 – 29 ), valamint a ( 4 ), ( 5 ) egyenletek azonosságának kimutatása Foglaljuk össze az eddigi eredmények és a belőlük fakadó teendők lényegét! ~ Rendelkezésünkre állnak a szemlélet alapján levezetett ( 4 ) és ( 5 ) egyenletek; utóbbiak átszámozva:
x y zx ' X q cos Y q cos Z q sin , ( 3 – 1 )
x y zy ' X q sin Y q sin Z q cos . ( 3 – 2 )

18
~ Rendelkezésünkre állnak a térbeli vetítési feladat vektoralgebrai megoldásának egyen-letei, ( 2 – 26 ) és ( 2 – 29 ); utóbbiak átszámozva:
R R
R R2 2
R R
u u vX Z Yw v u
1 v u vx ' Y Z X .w v uu vu vZ X Yw w
( 3 – 3 )
R R R R2 2
1 1y ' X v Z Y u Z Z u Y v X .du v
( 3 – 4 )
~ Ha jól dolgoztunk, akkor a ( 3 – 1 ) és ( 3 – 3 ), valamint a ( 3 – 2 ) és ( 3 – 4 ) képletek azonos jelentéssel bírnak: ugyanazt fejezik ki, más alakban. Ennek belátásához ki kell mutatni az egyenletekben szereplő megfelelő tagok azonosságát. Ezt az alábbiak szerint tesszük. A 8. ábrán összefoglaltuk a könnyebb megértés és áttekintés végett a hamarosan külön-váló részeket. Először ( 3 – 1 ) és ( 3 – 3 ) összehasonlítását végezzük el. Alakítsuk át ( 3 – 3 ) - at!
R RR
R RR2 2
R R
Z Y vX u u Yw v uZ X1 ux ' Y v v X .w u vu v
u vZ X Yw w
( 3 – 5 )
Minthogy az R nyilának hegye rajta van a képsíkon, így a sík tengelymetszetes egyen-letének megfelelően:
R R RX Y Z 1;u v w
( 3 – 6 )
most ( 3 – 6 ) - tal:

19
8. ábra
R R RR
R R RR
Z Y Xu u u 1 u X ,w v uZ X Yv v v 1 v Y ,w u v
( 3 – 7 )
majd ( 3 – 5 ) és ( 3 – 7 ) - tel:
R R
R R2 2
R R
vX u X Yu
1 ux ' Y v Y X .vu v
u vZ X Yw w
( 3 – 8 )
20
a.) R R x2 2
1 vu X Y q cos ?uu v
Tegyük fel, hogy a feltett kérdésre a válasz: igen. Ekkor ( 1 ), ( 2 ) - vel is:
R R1 v Uu X Y cos ;c u u
R Ru vu X Y U cos ;c u
R Ru vu X Y U cos .c c ( 3 – 9 )
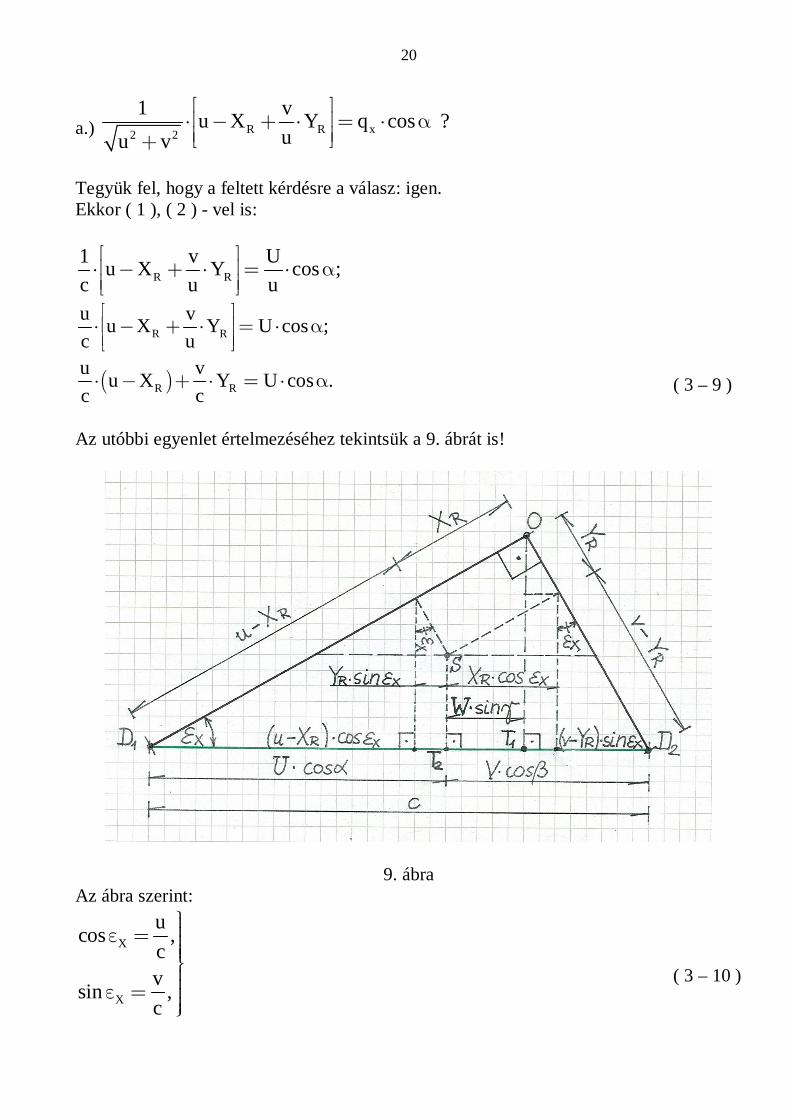
Az utóbbi egyenlet értelmezéséhez tekintsük a 9. ábrát is!
9. ábra Az ábra szerint:
X
X
ucos ,cvsin ,c
( 3 – 10 )

21
így ( 3 – 9 ) és ( 3 – 10 ) - zel: R X R Xu X cos Y sin U cos . ( 3 – 11 ) A 9. ábráról leolvasható, hogy ( 3 – 11 ) fennáll, így a.) teljesül. ☻
b.) R R y2 2
1 uv Y X q cos ?vu v
Tegyük fel, hogy a feltett kérdésre a válasz: igen. Ekkor ( 1 ) és ( 2 ) - vel is:
R R1 u Vv Y X cos ;c v v
R Rv uv Y X V cos ;c v
R Rv uv Y X V cos .c c ( 3 – 12 )
Most ( 3 – 10 ) és ( 3 – 12 ) - vel: R X R Xv Y sin X cos V cos . ( 3 – 13 ) A 9. ábráról leolvasható, hogy ( 3 – 13 ) fennáll, így b.) teljesül. ☻
c.) R R z2 2
1 u vX Y q sin ?w wu v
Tegyük fel, hogy a feltett kérdésre a válasz: igen. Ekkor ( 1 ) és ( 2 ) - vel:
R R1 u v WX Y sin ;c w w w
R Rw u vX Y W sin ;c w w
R Ru vX Y W sin .c c ( 3 – 14 )

22
Most ( 3 – 10 ) és ( 3 – 14 ) - gyel:
R X R XX cos Y sin W sin . ( 3 – 15 ) A 9. ábráról leolvasható, hogy ( 3 – 15 ) fennáll, így c.) teljesül. ☻ Ezzel ( 3 – 1 ) és ( 3 – 3 ) azonosságát kimutattuk. ☺
d.) R x2 2
1 1 v Z q sin ?du v
Tegyük fel, hogy a feltett kérdésre a válasz: igen. Ekkor ( 1 ), ( 2 ) és ( 3 – 10 ) - zel is:
Rv UZ sin ;
cd u
Ru v Z U sin ;c d
XR
v cos Z U sin .d
( 3 – 16 )
Most nézzük a 10. ábrát, amely a 8. és 9. ábra alapján készült!
10. ábra

23
Eszerint:
dX
d cos ',v cos
( 3 – 17 )
majd a ( 3 – 16 ) és ( 3 – 17 ) képletekkel:
R
d
Z U sin .cos '
( 3 – 18 )
A 10. ábráról leolvasható, hogy ( 3 – 18 ) fennáll, így d.) teljesül. ☻
e.) R y2 2
1 1 u Z q sin ?du v
Tegyük fel, hogy a feltett kérdésre a válasz: igen. Ekkor ( 1 ), ( 2 ) és ( 3 – 10 ) - zel is:
Ru 1 VZ sin ;c d v
Ru v Z V sin ;c d
XR
v cos Z V sin ;d
( 3 – 19 )
majd ( 3 – 17 ) és ( 3 – 19 ) - cel:
R
d
Z V sin .cos '
( 3 – 20 )
A 10. ábráról leolvasható, hogy ( 3 – 20 ) fennáll, így e.) teljesül. ☻
f.) R R z2 2
1 1 u Y v X q cos ?du v
Ekkor ( 1 ), ( 2 ) és ( 3 – 10 ) - zel is:
R Ru 1 v 1 WY X cos ;c d c d w

24
R Rw u vY X W cos ;d c c
R X R Xw Y cos X sin W cos .d ( 3 – 21 )
A 10 ábra szerint:
dd sin ',w
( 3 – 22 )
majd ( 3 – 21 ) és ( 3 – 22 ) - vel:
R X R X
d
Y cos X sin W cos .sin
( 3 – 23 )
A 10. ábráról leolvasható, hogy ( 3 – 23 ) fennáll, így f.) teljesül. ☻ Ezzel ( 3 – 2 ) és ( 3 – 4 ) azonosságát is kimutattuk. ☺ Ez azt is jelenti, hogy a térbeli adatokkal dolgozó ( 3 – 3 ), ( 3 – 4 ) - ről áttérhetünk a képsíkbeli adatokkal dolgozó ( 3 – 1 ), ( 3 – 2 ) - re. Ehhez célszerű lehet a rövidülési együtthatókat is képsíkbeli adatokkal kifejezni. 4.) A rövidülési együtthatók számítása
Ehhez tekintsük a 11. ábrát is! Itt egy O x y
segéd ~ koordináta - rendszert is
feltüntettünk, a számítások könnyebb áttekinthetősége végett. a.) xq ? A 11. ábra alapján, szinusz - tétellel:
sinU c ;
sin
( 4 – 1 )
most ( 1 ), ( 2 ) és ( 4 – 1 ) - gyel:
2
xU v sinq 1 ;u u sin
( 4 – 2 )
most az ( ED / 4 – 19 ) képlettel is: 2v tg ,
u tg ( 4 – 3 )

25
11. ábra
így ( 4 – 2 ) és ( 4 – 3 ) - mal:
xtg sinq 1 .tg sin
( 4 – 4 )
b.) yq ? Hasonlóan:
sinV c ;
sin
( 4 – 5 )
2
yV u sinq 1 ;v v sin
( 4 – 6 )
2u tg ,v tg
( 4 – 7 )
végül ( 4 – 6) és ( 4 – 7 ) - tel:
ytg sinq 1 .tg sin
( 4 – 8 )

26
c.) zq ? A 11. ábra alapján, koszinusz - tétellel:
2 2 2W a U 2 a U cos . ( 4 – 9 ) ( 1 ), ( 4 – 1 ) és ( 4 – 9 ) - cel:
2 22 2 2z 2 2 2
W 1 sin sinq a c 2 a c cos .w w sin sin
( 4 – 10 )
Most felhasználjuk, hogy ( 2 ) szerint: 2 2 2
2 2 2
a u w , c u v ,
( 4 – 11 )
így ( 4 – 10 ) és ( 4 – 11 ) - gyel:
2 2 2 22z 2 2 2 2 2
u u v sin a c sinq 1 2 cos ;w w w sin w sin
( 4 – 12 )
majd ( 3 ) - ból: 2
2 2
a c u 1 ,w w cos
( 4 – 13 )
így ( 4 – 12 ) és ( 4 – 13 ) - mal:
2 2 2 2 22z 2 2 2 2 2
2 2 2 2 2 2
2 2 2 2 2 2
22
2
cosu u v sin u sinq 1 2w w w sin w cos sin
cosu u w v sin u sin 1 1 2w w u w sin w cos sin
u v si 1 1 1w u
2
2
cosn sin2 ;sin cos sin
( 4 – 14 ) most felhasználjuk az ( ED / 4 – 19 ) szerinti
2
2
v tg ,u tg
u tgw tg
( 4 – 15 )
képleteket, így ( 4 – 14 ) - ből:

27
22z 2
costg tg sin sinq 1 1 1 2 ;tg tg sin cos sin
( 4 – 16 )
majd tekintettel a tg tg 180 tg tg
( 4 – 17 ) összefüggésre is, ( 4 – 16 ) így alakul:
22z 2
tg cos sin tg sinq 1 1 2 1 ,tg cos sin tg sin
( 4 – 18 ) innen pedig
2
z 2
tg cos sin tg sinq 1 1 2 1 .tg cos sin tg sin
( 4 – 19 ) Megjegyezzük, hogy ha ismert κ, akkor qz számítható ( Q ) - ból is:
2 2 2z x yq 2 tg q q . ( 4 – 21 )
5.) A γ szög meghatározása Megfigyelhető, hogy
i iq q , ; , , ( i = x, y, z ); ( 5 – 1 ) vagyis a rövidülési együtthatókat sikerült 4 darab képsíkbeli adattal kifejezni. Most emlékezzünk vissza arra a korábbi kijelentésünkre, miszerint a klinogonális axonometrikus ábrázolás szabadsági foka: 4. A kép - koordináták ( 4 ), ( 5 ) képleteiben a fenti 4 paraméteren kívül még γ is szerepel. Azt várjuk, hogy γ már nem független adat. Ez a tény a 11. ábrából is látható: adott nyomháromszög – adott c, λ, μ – és adott ( α, β ) esetén γ a szerkesztés szerint is kiadódó mennyiség. A γ szög számításos meghatározásához tekintsük a 11. ábrát! Innen:
a3
a3
D O
D O
x xtg ;y y
( 5 – 2 )
szintén az ábra szerint:

28
3Dsin cos 1x a cos c c .tgsin 1
tg
( 5 – 3 )
Ezzel:
33DD
tgy x tg c .tg1tg
( 5 – 4 )
Hasonlóképpen, ( 4 – 1 ) - et is felhasználva:
aO
sin cos 1x U cos c c ;tgsin 1tg
( 5 – 5 )
ezzel:
aa OOtgy x tg c .tg1
tg
( 5 – 6 )
Most az ( 5 – 3 ), ( 5 – 4 ), ( 5 – 5 ), ( 5 – 6 ) kifejezéseket ( 5 – 2 ) - be helyettesítve:
a3
a3
D O
D O
1 1 1 1c ctg tg tg tg1 1 1 1x x tg tg tg tgtg ,tg tg tg tgy y c ctg tg tg tg1 1 1 1
tg tg tg tg
tehát:
1 1tg tg1 1tg tgtg ,tg tgtg tg1 1tg tg
( 5 – 7 )
illetve

29
1 1tg tg1 1tg tgarctg .tg tgtg tg1 1tg tg
( 5 – 8 )
Az ( 5 – 7 ), ( 5 – 8 ) képletekből kiolvasható, hogy
tg tg0, ha .tg tg
( 5 – 9 )
Ekkor ugyanis ( 5 – 7 ) számlálója zérus, nevezője pedig általában
tg tg 0 miatt véges. Az ( 5 – 8 ) képlet szerint is:
, ; , . ( 5 – 10 ) Ezzel a feladatot megoldottuk. Alkalmazások Az alábbiakban két fontos és érdekes speciális esetre alkalmazzuk az általános eset képleteit: a merőleges axonometriára és a madárvetületre. 1.) Az orthogonális axonometria, mint a klinogonális axonometria speciális esete Tekintsük a 12. ábrát! Itt együtt tüntetjük fel a klinogonális és az orthogonális tengelykereszteket, adott nyomháromszög esetére. ( A „0” lábindex egyidejűleg utal a κ = 0 esetre, ill. az orthogonális jelzőre.) A klin. ax. orth. ax. átmenet az
0
0
0
, , 0
( p0 )
paraméter - átmenetekkel írható le.

30
12. ábra
A 12. ábráról leolvashatók a már ismert ( ED / 4 – 5, 6, 7 ) szögösszefüggések:
0
0
0 0
90 ;
90 ;.
( A 1 )
Ezekkel és a rövidülési együtthatók képleteivel:
0 0
x x,00 0 0
tg sintg sinq 1 q 1 ,tg sin tg sin
ahol az
( ED / 4 – 21 ) képlet - alak állt elő;
0 0
y y,00 0 0
tg sintg sinq 1 q 1 ,tg sin tg sin
ahol az
( ED / 4 – 23 ) képlet - alak állt elő;
31
a qz rövidülési együttható átmenetéhez felhasználjuk, hogy
0 0 0
0 00
0 00 0 0
0
0 0 0 0
00
tg 90 ctg tgtgtg ctg tgtg 90
tg 180tgtg tg ,
tg tg 90
cos 90cos sin;
cos sincos 90
( A 2 )
ezekkel is:
2
z 2
20 0 0 0 0
z,0 0 0 0 20 0 0 0 0 0
0 0
tg cos sin tg sinq 1 1 2 1tg cos sin tg sin
sin sin tg sinq 1 tg tg 1 2 1sin sin tg sin
1 tg
20 0
0 20 0 0
tg sintg 1 1 ;tg sin
részletszámítások:
0 0 0 0 0 0 00
0 0 0
00
0
sin sin cos cos sin sin cossin sin tg
tg cos 1 ;tg
ezzel:
02
0 0 022
20 0 0 02 000
00
20
0
0
tg1tg sin tg 11tg sin tgtg cos 1cos 1 tgtg
1 tg ;tg1tg

32
ezzel:
2 002 2
0 0 0 02
0 00 0 0
0 0
00 0 0 0
0 00 0 0 0 0
0
tg1 tg 1tg sin 1 tg tg1 1 1tg tgtg sin 1 1
tg tg1tg
tg tg tg 1 tgtg tg ;tg tg tg tg1tg
ezzel:
20 0
0 0 0 20 0 0
00 0 0 0 0
0 0
tg sin1 tg tg 1 1tg sin
tg1 tg tg 1 tg tg ,tg
tehát:
20 0
z,0 0 0 0 0 020 0 0
tg sinq 1 tg tg 1 1 1 tg tg ,tg sin
azaz:
z,0 0 0q 1 tg tg , egyezésben ( ED / 4 – 31 ) - gyel. Azt kaptuk, hogy a ( p0 ) képletek első kettőjével a rövidülési együtthatók átmenete megvalósult. Még nézzük meg ( p0 ) harmadik sorának teljesülését is! Ez ( 5 – 9 ) és ( A 2 ) első egyenlete alapján rögtön adódik. 2.) A madárvetület, mint a klinogonális axonometria egy speciális esete A ferde axonometria általános képleteinek egy további alkalmazása gyanánt nézzük meg a madárvetület – ld.: [ 1 ]! – elnevezésű axonometria - fajtát, melynek tengelykeresztje a 13. ábra szerinti. Ekkor az axonometrikus képsík az ( X Y ) síkkal párhuzamos, esetleg azzal egybeeső – ld. a 14. ábrát! A nyomháromszög elfajul, ebből csak az X és Y koordináta - tengelyekkel párhuzamos, D3 - ból induló, végtelenbe tartó két félegyenes maradt. Megjegyezzük, hogy a szakirodalomban néhol katonaperspektívának nevezik ezt az axonometria - fajtát – ld.: [ 2 ]!

33
13. ábra
14. ábra A rövidülési együtthatók, ( q x,u ) - val is:
x,u
y,u
z
q 1,q 1,
Wq tg .w
( A 3 )

34
A 13. ábrán is közölt feltételek: 90 ,0.
( A 4 )
Most ( 4 ), ( 5 ), ( A 3 ), (A 4 ) szerint a rajzi kép - koordináták:
x ' L X cos Y sin ,
y ' L X sin Y cos Z tg .
( A 5 )
Látjuk, hogy a 2 darab ábrázolási feltétel miatt a feladat szabad paramétereinek száma: 2. Az ( α , κ ) adatok tetszőlegesen választhatók, a ( κ ) relációra is ügyelve. Megjegyezzük, hogy [ 1 ] szerint a κ = 45° - hoz tartozó speciális esetben katonavetület- ről beszélünk, amikor is minden rövidülési együttható egységnyi. Mintapélda: Ábrázoljuk az 1,00 m oldalhosszúságú kockát madárvetületben, ha az adatok: α = 45°, κ = 30°, a léptéktényező L = 1 : 50! Megoldás: A kocka testátlója P végpontjának térbeli koordinátái: XP = YP = ZP = 1,00 m = 100 cm. Ezzel és ( A 5 ) - tel a P pont rajzi képkoordinátái:
P1x ' 100 cm cos 45 100 cm sin 45 0 cm;50
tehát:
Px ' 0 cm.
P1y ' 100 cm sin 45 100 cm cos 45 100 cm tg30
50 1,6737 cm 1,7 cm,
tehát
Py ' 1,7 cm. A végeredményt a 15. ábrán szemléltetjük. Látjuk, hogy egy felülnézetes képet kaptunk. Ezzel a mintapéldát megoldottuk.

35
15. ábra Irodalom: [ 1 ] – Lőrincz Pál ~ Petrich Géza: Ábrázoló geometria 3. kiadás, Tankönyvkiadó, Budapest, 1985. [ 2 ] – Pelle Béla: Geometria Tankönyvkiadó, Budapest, 1979. Összeállította: Galgóczi Gyula mérnöktanár Sződliget, 2009. szeptember 10.