a corrected lagrange multiplier testapplication to stock market returns dissertation ... economics...
TRANSCRIPT

A CORRECTED LAGRANGE MULTIPLIER TEST WITH APPLICATION TO STOCK MARKET RETURNS
DISSERTATION
Presented in Partial Fulfillment of the Requirements for
The Degree Doctor of Philosophy in the Graduate
School of The Ohio State University
By
Edward Richard Percy, Jr., B.S., M.S., M.B.A.,C.P.A.,M.A.
* * * * *
The Ohio State University 2005
Dissertation Committee: Approved by Professor J. Huston McCulloch, Adviser Professor Paul Evans
___________________________ Professor Stephen R. Cosslett Adviser Economics Graduate Program

ii
ABSTRACT
This paper introduces a Lagrange Multiplier goodness-of-fit test that is not
biased by the presence of unknown model parameters even in finite samples. Many
well-known goodness-of-fit tests rely on the empirical distribution of residuals being
arbitrarily close to the “true” underlying error distribution; or, equivalently, that model
parameter estimates are actually equal to the parameter’s “true,” typically unknown
values. While this assumption may be approximately correct as for a very large sample
size, such tests are biased towards acceptance with finite sample sizes.
The test statistic of the proposed procedure is asymptotically chi-squared. Exact
finite sample sizes are calculated employing Monte Carlo simulations. Powers of the
test are shown under assumptions of various underlying data generating processes. For
samples of as few as 30 observations, size distortion is quite low.
Any unknown model parameters can be estimated by the maximum likelihood
principle without asymptotically biasing the test. Furthermore, the test is an
asymptotically, locally most powerful test in the class of unbiased tests against a general
set of alternatives.
The methods suggested are a necessary complement to classical procedures,
which often assume a normal error distribution, and nonparametric procedures that do

iii
not rely on a particular error distribution but do require that the unknown distribution
have a finite variance.
Linear, quadratic, and cubic splines are used to search for the best possible
alternative to an error distribution to be tested. These classes of alternative hypotheses
are shown to be members of a set which includes a variation of the classical Neyman
smooth tests and the Pearson chi-squared tests. Comparisons of size and power with
such tests are given.
An empirical example using stock return data is presented comparing symmetric
stable error distributions with generalized student-t distributions.

iv
Dedicated to my parents Marie K. and Edward R. Percy, Sr., my soul mate Georgia Ward, and my stepsons, Matt and Zach

v
ACKNOWLEDGMENTS
I want to express my deep appreciation and significantly acknowledge the vast
amount of input, inspiration and number of original ideas from my dissertation
supervisor, Professor J. Huston McCulloch. I wish to call especial attention to his vast
knowledge of leptokurtic distributions, my use of his excellent bibliography, and his
work, “A Spline Rao (LM) Test for Goodness of Fit: A Proposal,” (1999), which I have
used extensively as seed and, in some cases, the substance of ideas recorded herein.
I also want to thank the other members of my Dissertation Committee,
Professors Paul Evans and Stephen R. Cosslett for substantial counsel and comments,
both written and verbal during my work preceding this dissertation. Additionally, I
want to thank Professor Pok-Sang Lam for his ideas at the proposal stage and for giving
advice while on my Advisory Committee. Professor Nelson Mark may not remember,
but the germination of my interest in error distributions of financial series came from a
meeting with him. I asked him to suggest a research topic for me in his international
finance class and he suggested error distributions on forward premium foreign exchange
rates.
I want to thank the members of the Midwest Econometrics Group for their input
when preliminary ideas from this dissertation were presented, with special thanks to

vi
Professor Anil Bera, who reviewed some preliminary work, offered helpful comments,
and was kind enough to be an outside-the-university reference to recommend that my
work receive support through a university fellowship.
For the stock market return application, I want to thank Professor G. Andrew
Karolyi for providing information and location of the financial series on Kenneth
French’s website,
http://mba.tuck.dartmouth.edu/pages/faculty/ken.french/data_library.html.
I will close by repetitiously thanking Professor J. Huston McCulloch again; it
was through his contact that I met Dr. Bera and that I learned so much about leptokurtic
distributions. I cannot begin to list all the ideas that he has had in helping me;
additionally, I cannot imagine having a better adviser for this project.
vii
VITA
August 31, 1953……………………………. Born – Lockbourne AFB, Columbus, Ohio June, 1975…………………………………...B.S., Statistics (Major -35 hours) and
Mathematics (45 hours), The Ohio State University
March, 1977………………………………... M.S., Applied Statistics, The Ohio State
University November, 1977 – May 1978……………….Society of Actuary Examinations, 1, 2, & 3 July 1986…………………………………… M.B.A., Business Administration, Dayton
University November 1990…………………………….. Certified Public Accountant December 1998……………………………...M.A., Economics, The Ohio State
University 1975-1977…………………………………...Graduate Teaching Associate, Department
of Statistics, The Ohio State University 1978-1996…………………………………...Vice President, Actuarial and Group
Administration (most notable position among many), Central Benefits Mutual Insurance Company (formerly Blue Cross of Central Ohio)
1997-2002………………………………….. Graduate Teaching and Research
Associate, Department of Economics, The Ohio State University
2003-2004………………………………….. Assistant Professor, Finance and
Economics, Capital University

viii
2005…………………………………………Adjunct Professor, Economics, The Pontifical College Josephinum
2006………………………………………....Instructor, Economics, The Ohio State
University, Marion Campus, Delaware Branch
PUBLICATIONS
The Journal of Labor Economics, “The Long and Short of It: Maternity Leave Coverage and Women's Labor Market Outcomes” (Joint work with Masanori Hashimoto, Teresa Schoellner, and Bruce Weinberg) – (Submitted July 2004; status: revise and resubmit February 2005). “Cash Flow Analysis and Capital Asset Pricing Model”, developed for Keck Undergraduate Computational Science Education Consortium, supported by W.M. Keck Foundation, http://www.capital.edu/acad/as/csac/Keck/modules.html, August 2004. “Option Pricing”, developed for Keck Undergraduate Computational Science Education Consortium, supported by W.M. Keck Foundation, http://www.capital.edu/acad/as/csac/Keck/modules.html, February 2005.
FIELDS OF STUDY
Major Field: Economics Subfields: Econometrics Finance

ix
LIST OF FIGURES
Figure Page Figure 1.1. Two sample densities compared with the uniform distribution. 9 Figure 1.2. Corresponding CDFs to densities in Figure 1.1. 10
Figure 1.3. Comparison of standard normal density to a contrived density that the Pearson test with 10 bins will be unable to detect. 13
Figure 1.4. Additional densities that the Pearson test will be unable to detect. 14
Figure 2.1. Simple cubic spline basis vectors for m=7 28
Figure 2.2. Cubic B-Spline basis vectors for m=7 32
Figure 2.3. Determinants of Fisher information matrices from first 12 simple polynomial bases 37
Figure 2.4. Neyman-Legendre basis with m = 7 39
Figure 3.1. Size distortion of Pearson test; difference between chi-square distribution and empirical distribution 43 Figure 3.2. Size distortion of Pearson test in tail of distribution 45
Figure 3.3. Size distortion of Neyman-Legendre test; difference between chi- square distribution and empirical distribution 46 Figure 3.4. Size distortion of Neyman-Legendre test in tail of distribution 47
x
Figure Page Figure 3.5. Size distortion of Cubic Spline test; difference between chi-square distribution and empirical distribution 48 Figure 3.6. Size distortion of Cubic Spline test in tail of distribution (m=6) 49 Figure 3.7. Size distortion of Cubic Spline test in tail of distribution (m=12) 50
Figure 3.8. Maximum likelihood estimates under assumption of Gaussian errors. 54 Figure 3.9. LM Test Statistics and p-values for Gaussian null hypothesis. 55 Figure 3.10. Maximum likelihood estimates under assumption of symmetric stable errors. 58 Figure 3.11. LM Test Statistics and p-values for stable null hypothesis. 59
Figure 3.12. Maximum likelihood estimates under assumption of generalized Student-t errors. 60 Figure 3.13. LM Test Statistics and p-values for Student-t null hypothesis. 61
Figure 3.14. Comparison of inverse distribution functions of Student-t and symmetrical stable error distributions at MLE. 62 Figure 3.15. Comparison of upper tail of inverse distribution functions of Student-t and symmetrical stable error distributions at MLE. 63 Figure 3.16. Ratio of of Student-t and symmetrical stable densities at MLE evaluated at the inverse stable distribution function. 64 Figure 3.17. Tests of a null of symmetric stable distribution with an underlying Student-t distribution, sample size 480. 66 Figure 3.18. Tests of a second null of symmetric stable distribution with an underlying Student-t distribution, sample size 480. 67 Figure 3.19. Tests of a null of symmetric stable distribution with an underlying Student-t distribution, sample size 10,000. 68 Figure 4.1. Comparison of results of 90 tests where the null hypothesis and the underlying distributions were both symmetric stable distributions. 71
xi
Figure Page Figure 4.2. Comparison of summary results of 90 tests where the null
hypothesis and the underlying distributions were both symmetric stable distributions by type of test. 72
Figure 4.3 Empirical Distribution Functions of CRSP data. 74
Figure 6.1. Estimated density using an underlying Gaussian and a perturbation function dependent on a basis of four cubic B-splines. 96 Figure 6.2. Estimated density using an underlying uniform density and a perturbation function dependent on a basis of four cubic B-splines. 98 Figure 7.1. Effect of first four basis vectors on Gaussian density. 102 Figure 7.2. Effect of basis vectors five through eight on Gaussian density. 103
Figure 8.1. Conditional densities of σt given that σt-1 is at the 1st, 25th, and 50th percentiles of the unconditional distribution. 113 Figure 8.2. Conditional densities of σt given that σt-1 is at the 75th and 99th percentiles of the unconditional distribution. 114 Figure 8.3. Sum of 99 conditional densities to approximate the unconditional density. 115 Figure 8.4. Sum of 99 conditional cdfs to approximate the unconditional cdf. 116 Figure 8.5. Unconditional density derived from unconditional cdf. 117 Figure 8.6. Comparison of smoothness using 10,000 points rather than 99 points. 118 Figure 8.7. Upper tail of unconditional distribution of σ . 119 Figure 9.1. Empirical size of 0.10 tests using the naïve and corrected Cubic Spline and Neyman GFTs using numerical quadrature. 131 Figure 9.2. Power of tests to detect a GED with a stable null with 316 observations. 132

xii
Figure Page Figure 9.3. Power of tests to detect a GED with a stable null with 1000 observations. 133 Figure A.1. Various GED densities. The letter “a” represents the exponent “α.” 146 Figure D.1. Degrees of Freedom vs. Ratio of Moments in a Student-t Distribution 160 Figure D.2. Power vs. Ratio of Moments in a GED distribution 163
Figure F.1. Examples of quasi-random numbers and pseudo-random numbers over the unit square. 173 Figure G.1. Systematic portion of error function of 25th Neyman-Legendre basis vector 182

xiii
TABLE OF CONTENTS
Page Abstract………………………………………………………………………………….ii Dedication………………………………………………………………………………iv Acknowledgments……………………………………………………………………….v Vita……………………………………………………………………………………..vii List of figures…………………………………………………………………………...ix Chapters: 1. Introduction……………………………………………………………………… 1 1.1 What is the Error Distribution in Financial Series?........................................ 6 1.2 An “Ideal” Goodness-of-Fit Test…………………………………………….7 1.3 Some Well-Known Goodness-of-Fit Tests..................................................... 8 1.4 Presence of Estimated Model Parameters…................................................. 14 2. Preliminaries in the Development of an Appropriate Lagrange Multiplier Test. 18 2.1 Lagrange Multiplier (LM) Test for a Uniform Distribution………………. 18 2.2 Technical Considerations………………………………………………….. 22 2.3 Spline Lagrange Multiplier Test for a Uniform Distribution……………... 24 2.4 B-Spline Basis……………………………………………………………... 27 2.5 Neyman’s Smooth Test……………………………………………………. 33 2.6 Simple Polynomial Basis………………………………………………….. 36 2.7 Orthogonal Polynomial Basis……………………………………………... 38 3. The Lagrange Multiplier Test………………………………………………… 41 3.1 Lagrange Multiplier Test for a General Completely Specified Distribution 41 3.2 Finite Sample Properties with a Completely Specified Distribution…….... 42 3.3 LM Test for a General Distribution with Estimated Model Parameters....... 51

xiv
Page 3.4 First Test with Model Parameters…………………………………………. 53 3.5 Investigation of Sensitivity………………………………………………... 61 4. Results of Other GFTs…………………………………………………………. 70
4.1 Residual Tests……………………………………………………………... 70 4.2 Empirical Distribution Function Tests…………………………………….. 72
5. Improvement in Results Due to Numerical Quadrature of Fisher Information Matrix………………………………………………………………………...… 76
5.1 Derivation of Fisher Information Matrix…………………………...………76 5.2 Numerical Two-Sided Differentiation………………………………...……82 5.3 Numerical One-Sided Differentiation……………………………………... 88 5.4 Romberg Integration………………………………………………………. 91
6. In the Event of Multiple Rejections or Non-Rejections………………………... 95 6.1 Multiple Rejections………………………………………………………... 95 6.2 Multiple Non-Rejections……………………………………………...…… 99 7. Meaning of Basis Vectors of Perturbation Functions……………………….... 101 8. Time Dependent Errors……………………………………………………….. 105 8.1 Examples Using Time Series Models………………………………….… 105 8.2 Estimation of σ1.......................................................................................... 109 9. Test Recommendations for Financial Data…………………………………… 126 9.1 Size Distortion…………………………………………………………….128 9.2 Power……………………………………………………………………...129 9.3 With a Stable Null………………………………………………………... 130 9.4 With a Student-t Null...…………………………………………………... 133 9.5 With a GED Null….....…………………………………………………... 134 9.6 With a Mixture Null.....…………………………………………………... 134 9.7 Basis Size vs. Sample Size………………………………………..……… 134 10. Conclusion……………………………………………………………………..140 Appendices: A. Densities and Distributions…………………………………………………….142

xv
Page A.1 Stable Distributions……………………………………………………… 142 A.2 Pareto Distributions………………………………………………………143 A.3 Generalized Error Distributions (G.E.D.)……………………………….. 145 A.4 Student-t Distributions………………………………………………...… 147 A.5 Mixture of Two Gaussians………………………………………………. 148 A.6 Cauchy Distribution and Its Use in Integration Over the Infinite Real Line……………………………………………………………………….150 B. 1-1 Correspondence between a General Distribution and a Uniform over [0,1]151 C. Pseudo-Random Number Generator and Monte Carlo Methods……………... 152 C.1 Random Number Generator………………………………………….….. 152 C.2 Calculation of Empirical Quantiles…………………………………….... 154 C.3 Addition of 2-33 to Pseudo-Random Numbers…………………………… 155 D. Starting Values for Iterative Maximum Likelihood Estimation……………… 157 D.1 Initial Estimates for Parameters For Use In Maximum Likelihood Estimation………………………………………………….……………. 157 E. Invariance of LM Statistic with Respect to Linear Transformations or Exponentiation………………………………………………………………... 166 F. Unconditional Calculation of σ2…………………………………………….. 171 F.1 Quasi-Random Numbers……………………………………………….... 171 F.2 Rule of Thumb for Maximal “Reasonable” Values of σ2……………..… 177 G. Rounding Concerns…………………………………………………………... 179 G.1 Rounding Errors in Polynomials……………………………………….... 179 G.2 Rounding with GAUSS Software……………………………………….. 182 G.3 Evaluation of Polynomials by Horner’s Rule………………………...…. 185 H. Neyman and Spline Bases…………………………………………………..… 187 I. Size and Power with Various Null Hypotheses………………………………. 215 I.1 Stable Size………………………………………………………………... 215 I.2 Student-t Size…………………………………………………………….. 218 I.3 GED Size………………………………………………………………..... 220 I.4 Mixture Size…………………………………………………………….... 223 I.5 Stable Power……………………………………………………………... 225
xvi
Page I.6 Student-t Power………………………………………………………….. 230 I.7 GED Power……………………………………………………………..... 234 I.8 Mixture Power………………………………………………………….... 238 Bibliography……………………………………………………………………….... 243

xvii
THE LAGRANGE MULTIPLIER TEST
3.1 LAGRANGE MULTIPLIER TEST FOR A GENERAL COMPLETELY
SPECIFIED DISTRIBUTION
APPENDICES APPENDIX A…………………………………………………..…………………………….. who knows # APPENDIX B…………………………………………………..…………………………….. who knows # Bibliography……………………………………………………………………………………………. Big#
xviii
LIST OF FIGURES
Figure Page 2.1 blalahsldfkjl;skjdf………………………………………………………… 3 2.2 lkasjdfl;kjasdf…………………………………………………………… 4

1
CHAPTER 1
INTRODUCTION
Adler, Feldman and Taqqu (1998) preface their collection of papers with the
observation that ever since information has been gathered, it has either been categorized
as “good data” (translation: the investigator knew how to choose and perform the
appropriate statistical tests) or “bad data” (that is, the observations did not conform to
well-known and well-understood distributions, often having too many outliers or
outliers that were too far from what was expected). This may lead to some studies not
being completed at all, while others may interpret the data without taking advantage of
the totality of information present.
Proper distributional assumptions in econometric and financial models are of
critical importance. If the distribution of error terms is inconsistent with the assumed
model, then the assumed model is misspecified. If a set of assumptions concerning
error terms exists and is not used, then estimates of a model’s parameters are needlessly
inefficient.
Though there is a critical need in financial and economic models to match the
right tool to the right distribution, the tests suggested herein are not restricted to those
disciplines. This question is just as important in many other fields. Frequently, “bad

2
data” may simply be “misunderstood data.” With better tools, more studies can be
completed and better conclusions can be drawn.
Many often-used modeling techniques, such as Ordinary Least Squares (OLS)
and the Generalized Method of Moments (GMM), do not require the specification of the
distribution of the error terms. Appealing to different versions of the law of large
numbers, estimators of parameters using these techniques can be shown to be
consistent. In addition, estimators can be shown to be consistent under certain moment
conditions. Since some laws of large numbers depend only on the first moment,
specification of a finite variance is not even required. However, Maximum Likelihood
(ML) Estimators that exploit the properties of a particular distribution are not only
consistent but also asymptotically efficient.
In some cases the investigator may be satisfied with a lesser level of relative
efficiency in estimating the expected value of a random variable if the burden of
searching for a more efficient estimation method is too difficult. However, consider the
example of risk-averse agents making inferences concerning future values of a financial
time series. With risk-neutral agents, it may be enough to estimate expected values of
returns. However, with risk-averse agents it is well known that second and higher
moments of distributions matter in the selection of an optimal investment portfolio. In
addition, it is often desirable to place confidence limits on estimates of expected values,
to calculate variances and, perhaps, measures of skewness and kurtosis. To accomplish
these goals, one should not use the classical methodologies, such as least squares for
calculating means and variances conditional upon exogenous variables by using an
assumption that all error terms are from a random sample independently drawn from
3
normal distributions with an identical yet unknown mean and variance, unless the
assumptions of the model selected are at least approximately satisfied.
There are many tests that have been offered in the literature for determining
whether an observed sample is likely to have been drawn from a normal distribution.
There are also more robust, distribution-free or nonparametric tests that can be used.
However, in many cases taking advantage of additional distributional information may
lead to more efficient inferences and, for that reason, is to be preferred over the
automatic use of nonparametric methods.
With some models previous work by others suggest distributions to be
hypothesized. It is well known in financial literature that error terms of returns of many
assets are leptokurtic, having an unusually high number of observations several standard
deviations from the mean. This phenomenon suggests that it is inappropriate to make
an assumption of normality in dealing with estimates arising from the use of such
samples drawn from real world data. In addition it may be helpful to estimate
parameters by something other than minimizing a quadratic form. As is well known,
using least squares estimators is equivalent to using maximum likelihood estimators
when the underlying error distribution is Gaussian. With other distributional
assumptions, this relationship disappears.
Some applied practitioners show parameter estimates calculated both with and
without observations that have residuals more than a given number of standard errors
from zero. This disposing of data (or, in some cases, reducing some observations’
distances from the median or reducing their impact on the model) without just cause
should make theoreticians cringe. However, if the calculation methods are least-squares
4
based and the error terms are distributed with a distribution that has an infinite variance,
it may be that a truncated or “Winsorized”1 estimator actually has a greater probability
of lying within a given distance from the true parameter than the least squares estimator.
With financial time series, several non-Gaussian distributions have been
suggested with the hope that one of these may be more appropriate in making
inferences. Among these are stable distributions (also called stable Pareto-Lévy or
stable Paretian distributions), which include the normal distribution as a special case.
Other distributions that are considered as substitutes are mixtures of more than one
normal distribution, generalized Student-t distributions and distributions that are
mixtures of continuous distributions and discrete distributions which are used to
account for sudden increases or decreases in a sample. Since the early 1980s
Autoregressive Conditionally Heteroskedastic (ARCH) and Generalized Autoregressive
Conditionally Heteroskedastic (GARCH) models have also been used to try to explain
distributions of error terms that are not independent and identically distributed (IID).
Two additional reasons for attempting to determine the distribution of error
terms follow. First, if a particular distribution is determined not to be the underlying
distribution of the error terms, then, by implication, at least one of the necessary
assumptions for that distribution must be false. This may lead to a new understanding
of the observations and possibly a new theoretical model. Second, if a particular
distribution does have a reasonable possibility of being the underlying distribution of
the error terms, one can extrapolate to possible values that are not apparent in the 1 Perhaps coined by John Tukey in honor of the biostatistician, Charles P. Winsor, who supposedly adopted the practice of replacing outliers with values closer to the median of the residual distribution, so that such outliers would have less impact on a model’s parameters.

5
sample but could occur in the future. That is, with a theoretical distribution, tail
probabilities that are more remote than could be observed with the limited data can be
estimated.
This paper proceeds as follows. The remainder of the introduction outlines the
distributional conclusions and assumptions of previous studies on financial series,
offers a brief outline of a selected list of better-known influential goodness-of-fit tests
(GFTs), and discusses the special problems that exist with goodness-of-fit tests when
model parameters need to be estimated.
Chapter 2 introduces some preliminary work necessary to design the Lagrange
multiplier (LM) goodness-of-fit tests (GFTs). Chapter 3 introduces a completely
general LM GFT which has desirable size and power properties and presents and
analyzes an empirical example. Chapter 4 discusses the results of other conventional
GFTs. Chapter 5 introduces the need for more precise calculation of the Fisher
Information matrix and some numerical techniques to accomplish that, while Chapter 6
discusses what to do in the face of either multiple rejected or non-rejected hypotheses.
Chapter 7 gives the user insight into the meaning of various perturbing elements in the
alternative hypothesis. Chapters 8 expands the scope of the tests by showing how they
can work with time series, while 9 gives specific recommendations on how to use the
tests with financial data. Chapter 10 concludes.
There are several appendices some of which are highly recommended.
Appendix A gives various details of the densities and distributions that are used as null
hypotheses and also some that are used to aid in some of the numerical methods.
Appendix B justifies extending any GFT from a uniform distribution to a more general
6
distribution. Appendix C discusses how pseudo-random number generation is used and
a couple idiosyncratic procedures that I employ in its use. Appendix D shows some
method-of-moments and quantile estimators that are used for starting values for
maximum likelihood estimation of the more exotic distributions. Appendix E is
included to answer questions of using other sets of functions as bases for our alternative
hypotheses, particularly linear or exponential transforms. Appendix F goes hand-in-
hand with Chapter 8 and shows how one can use quasi-random numbers to obtain
unconditional maximum likelihood estimates of early variance terms in time series.
Appendix G identifies and addresses the many rounding concerns that are prevalent in
some of the methods herein. Appendix H provides a catalog of and some examples of
the many basis functions used in the GFTs. Appendix I shows much more in pictures
than Chapter 9 can in words to guide others in making choices as to proper GFTs to test
their assumptions.
1.1 WHAT IS THE ERROR DISTRIBUTION IN FINANCIAL SERIES?
There is a wide variety of opinion of the correct error distribution in many
financial series. Most researchers rule out Gaussian distributions after any testing of
skewness and kurtosis, although throughout the history of analysis, many have used
them; for example, Fama (1976) has suggested normal distributions for monthly returns
after previously (1965) being in the leptokurtic camp. Mandelbrot (1963),
Samorodnitsky and Taqqu (1995), and McCulloch (1996) have suggested the use of
stable distributions. A search for finite-variance leptokurtic distributions has included
Blattberg and Gonedes (1974), Hagerman (1978), Perry (1983), and Boothe and
Glassman (1987) investigating alternatives such as Student-t distributions. Praetz

7
(1972) and Clark (1973) explored the possibility of a mixture of normal distributions.
Among models with changing volatility, Campbell, Lo, and MacKinley (1997) report
the following studies which model for conditional leptokurtosis: Bollerslev (1987)
suggested the use of a Student-t distribution, Nelson (1991) tried a Generalized Error
Distribution, whereas Engle and Gonzalez-Rivera (1991), tried a non-parametric
approach.
With this literature and appropriate goodness-of-fit tests (GFTs), there would
seem to be a rich array of parametric distributions to choose from before one must
resort to nonparametric procedures. A challenge that this paper is aimed at is choosing
appropriate GFTs that can work well with all the above distributions.
1.2 AN “IDEAL” GOODNESS-OF-FIT TEST
In this section, I want to motivate a GFT by illustrating to the reader what we
would like to see if (1) we knew the specified model, (2) the true values of all its
parameters, (3) the true form of its error distribution function F(ε), and (4) an infinite
sample size. If we were able plot a histogram of the infinite number of values of the
form F(ε1), F(ε2), …, it would look like a uniform distribution over the unit interval.
One would expect any subinterval of the unit interval of length λ to contain a proportion
λ of the functional values.
Of course we will not have an infinite sample size, so we can expect some
variation in the heights of the bars in any histogram regardless of its partition of
intervals. Since we also do not know the error function but might like to test whether a
hypothesized error function is reasonable, we can imagine a test that specifies how far
from the uniform distribution one might expect the empirical function to deviate under

8
the assumption that we have chosen the correct error function. Additionally, instead of
constructing a histogram with a partition of intervals, we might try to fit the empirical
errors to some functional form defined over the unit interval and see how far such a
functional form is from a uniform distribution.
The presence of unknown model parameters will require that we make estimates
of the model parameters, so we will have to content ourselves with residuals which are
estimates of the error terms rather than the error terms themselves. Alas, the last
assumption, that we have correctly specified the model, is not investigated in this study,
but we will see that the complication of not knowing the values of model parameters,
which is one of the normal conditions of most studies, will be challenging enough to
stimulate a considerable body of work.
1.3 SOME WELL-KNOWN GOODNESS-OF-FIT TESTS
The Kolmogorov-Smirnoff (KS) statistic is the largest distance between the
empirical distribution function and a 45° line on the unit interval. KS is independent of
the hypothesized distribution and critical values are dependent on n, however it requires
knowledge of the true values of the parameters in a distribution. While this test statistic
is sensitive to the single data value that is “farthest” away from the population
cumulative distribution function (CDF), it does not directly take into account the
relative deviations of the other observations.
An Anderson-Darling type test statistic is a refinement of Kolmogorov-Smirnoff
that takes into account the smaller sampling variance of the values that are farther from
the median; however, it is still based on the single most extreme value, adjusted for
expected sampling variance. Andrews (1997) has offered a conditional K-S test that

9
accounts for the parameter estimation effects. Still, this test is based on a single point of
the empirical distribution.
The Cramér-von Mises test uses all the observations and is based on the
integrated squared distance between the empirical CDF and a 45° line. Since it is based
on a distribution function and not the density function directly, some densities may tend
to “fool” it. Consider the following example, adapted from McCulloch (1999), and
pictured below in Figure 1.1, along with a uniform density on the unit interval:
Let h1(z) =[ ]( ]
5 24 55 26 5
0,,1
0 otherwise
zz
⎧ ∈⎪ ∈⎨⎪⎩
and h2(z) = (5 24 57 46 7
0,
,1
0 otherwise
z
z
⎧ ⎡ ⎤∈ ⎣ ⎦⎪⎪ ⎤∈⎨ ⎦⎪⎪⎩
Sample Density 1
-0.5
0
0.5
1
1.5
0 0.2 0.4 0.6 0.8 1
z
Den
sity
h1(z) Uniform
Sample Density 2
-0.5
0
0.5
1
1.5
0 0.2 0.4 0.6 0.8 1
z
Den
sity
Uniform h2(z)
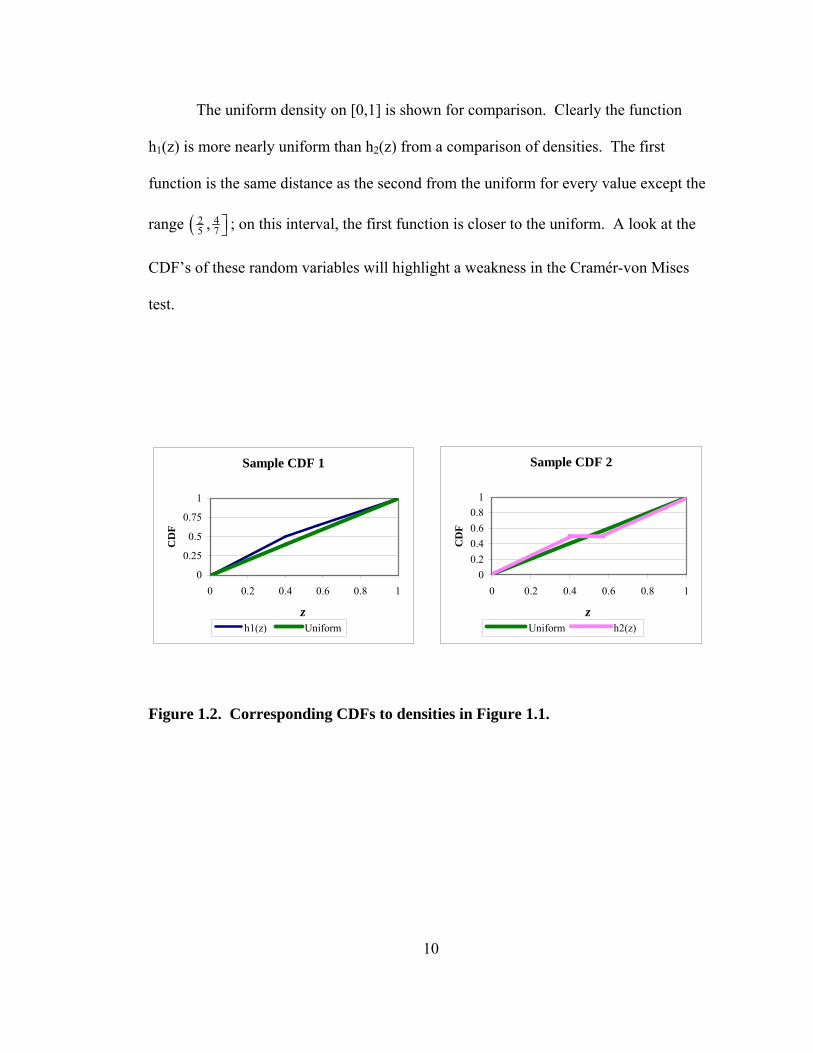
Figure 1.1. Two sample densities compared with the uniform distribution.
10
The uniform density on [0,1] is shown for comparison. Clearly the function
h1(z) is more nearly uniform than h2(z) from a comparison of densities. The first
function is the same distance as the second from the uniform for every value except the
range ( 2 45 7, ⎤⎦ ; on this interval, the first function is closer to the uniform. A look at the
CDF’s of these random variables will highlight a weakness in the Cramér-von Mises
test.
Sample CDF 1
0
0.25
0.5
0.75
1
0 0.2 0.4 0.6 0.8 1
z
CD
F
h1(z) Uniform
Sample CDF 2
00.20.40.60.8
1
0 0.2 0.4 0.6 0.8 1
z
CD
F
Uniform h2(z)
Figure 1.2. Corresponding CDFs to densities in Figure 1.1.

11
The CDF of h2(z) is the same distance from the 45° degree line as is h1(z)
everywhere except the interval ( 2 45 7, ⎤⎦ ; on this interval, its distance from the uniform is
smaller that the distance of h1(z). Thus, the integrated squared distance is smaller for
h2(z) than for h1(z). Therefore, the Cramér-von Mises test would be less likely to reject
h2(z) than h1(z) even though h2(z) departs more from the uniform. Since the
investigator is not likely to know the type of departure from the hypothesized
distribution a priori, it seems that a reasonable property for a GFT is to be more
sensitive to greater departures.
The best-known GFT is the Pearson χ2 test. It is safe to say that it appears in
more texts than any other GFT (See for example Hogg & Craig (1970)). For a
multinomial distribution with n observations the test is:
H0: pj = pj0 , j = 1, …, m+1 vs. H1: Not H0
The Pearson statistic is Qm = ( )2
1 0
01
m j j
jij
Obs np
np
+
=
⎡ ⎤−⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
∑ where Obsj is the number of
observations in the sample with the jth value.2 Any known distribution can be
transformed to a multinomial distribution with parameters {pj} by segmenting the
support of the distribution into m+1 sub-supports or “bins” and calculating the
population probability for each sub-support. It is not required that the pj be equal. This
statistic is easy to calculate, known to be asymptotically distributed as a χ2 statistic with
m degrees of freedom and can be used in a wide variety of situations. Its power is
dependent both on the choice of m and the choice of {pj}. It is intuitive that some 2 Here m+1 is used to facilitate future comparison with other tests. There are only m probability parameters being set since one of the parameters is constrained to be one minus the sum of the others.

12
power will be lost due to the reduction of information by grouping the data to test
continuous distributions. This grouping has the effect of assigning an equal density to
all possible values within each bin and also, perhaps, assigning nearby values that
happen to be in different bins very different density values. The following example will
highlight possible problems with this type of test.
Consider a test to determine whether n observations are from a standard normal
distribution with m + 1 = 10. For equiprobable bins, one would need 9 breakpoints
1
10j− ⎛ ⎞Φ ⎜ ⎟
⎝ ⎠, j = 1, …, 9, where Φ is the standard normal distribution. Below is a graph
of a standard normal density and also a contrived density (Figure 1.3) that integrates to
½ on either side of zero; it also integrates to very close to 0.1 between consecutive
standard normal deciles. Consequently, a Pearson χ2 test could not tell the difference
between a normal distribution and the pictured alternative.
13
0
0.1
0.2
0.3
0.4
0.5
0.6
-3 -1 1 3
Std. Nrml. Alt. 1
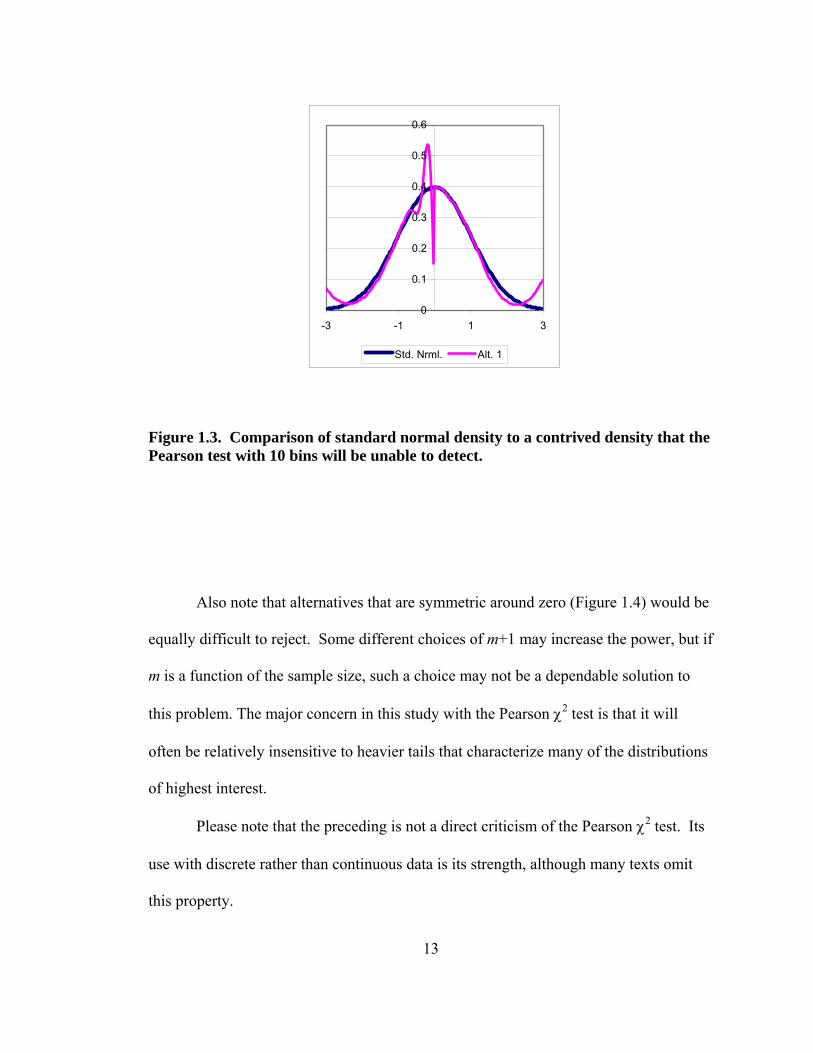
Figure 1.3. Comparison of standard normal density to a contrived density that the Pearson test with 10 bins will be unable to detect.
Also note that alternatives that are symmetric around zero (Figure 1.4) would be
equally difficult to reject. Some different choices of m+1 may increase the power, but if
m is a function of the sample size, such a choice may not be a dependable solution to
this problem. The major concern in this study with the Pearson χ2 test is that it will
often be relatively insensitive to heavier tails that characterize many of the distributions
of highest interest.
Please note that the preceding is not a direct criticism of the Pearson χ2 test. Its
use with discrete rather than continuous data is its strength, although many texts omit
this property.

14
0
0.1
0.2
0.3
0.4
0.5
0.6
-3 -1 1 3
Std. Nrml. Alt. 2
0
0.1
0.2
0.3
0.4
0.5
0.6
-3 -1 1 3
Std. Nrml. Alt. 3
Figure 1.4. Additional densities that the Pearson test will be unable to detect.
1.4 PRESENCE OF ESTIMATED MODEL PARAMETERS
In most models the residuals are estimates of the unknown underlying errors.
Roughly speaking, one can visually assess and infer a distribution of error terms from a
histogram of residuals. However, a visual assessment should be reduced to a
mathematical assessment since histograms will necessarily differ from underlying
distributions and what is desired is a determination of whether or not the histogram in
question is statistically significantly different from the hypothesized theoretical
distribution. For this task, GFTs must be designed to meet the varying needs of each
situation.
15
In general, the error random variables to be tested are unobservable. With a
standard regression model:
yi = h(Xi;β )+ ε i (Eq. 1.3.1)
is assumed to be true with i = 1 , …, n, where yi is the ith observed dependent variable,
Xi is a row vector (with dimension k) of known constants (or is uncorrelated with the
vector of ε’s),3 β is a k-vector of unknown coefficients, and εi is an unobservable
random variable with some distribution, with E(εi) = 0 (or possibly the median of εi’s
distribution is zero), Pr(εi < z) = F(z;γ), γ ∈ Γ, and εi is independent of εj if i ≠ j. The
function h(Xi;β ) could be linear or non-linear.
Under these assumptions we would like to test whether the vector
ε = 1 nε ε′
⎡ ⎤⎣ ⎦L is distributed according to the given function or if it has some other
distribution. Typically, one must estimate β and γ, after which one can find a vector of
residuals (e) that is an estimate of ε, rather than ε itself. McCulloch (1999) reports the
fact that if parameters are to be estimated from the data, standard tests are biased
towards acceptance of the null hypothesis, citing Mood, Graybill & Boes (1974), Bera
and McKenzie (1986), and Bai (1997). He continues to convey that such tests “may
even be asymptotically invalid.” DeGroot (1986) reports that Chernoff and Lehmann
(1954) established that the use of maximum likelihood estimates, when testing whether
a given distribution is normal, changes the asymptotic distribution of the test statistic
under the null hypothesis in such a way as to result in smaller values. Given that larger
values are necessary to reject the null hypothesis, this results in a greater than desired
3 As usual, it is further assumed that the matrix composed of rows of the Xi’s is of rank k.

16
level of acceptance. Work completed in this dissertation provides empirical evidence to
support this for the application of stock market returns.
Intuitively, any “good” estimators of the parameters seek to fit the model as
closely as possible. For example, with a classical linear regression and leptokurtic
errors, the sum of the squared true errors will almost surely be greater than4 the sum of
the squared residuals. This will tend to conceal the large errors that a test for
leptokurtosis would be seeking.
Rayner and Best suggest a solution to the problem of testing for normality using
residuals of Eq. 1.3.1 for a classical linear model, with the error terms assumed to be
IID with the CDF given as N(0,σ2). First, start with your favorite goodness-of-fit
statistic (GFS), using the residuals. By taking advantage of the familiar result from
linear regression:
e = Mε , where M = I – X(X′X)-1X′ (Eq. 1.3.2)
it is possible to simulate several new sets of pseudo-residuals by generating random
variables from a standard normal distribution and multiplying these normal random
variates by M. Conveniently, the matrix M must be calculated only once for a given
model. It is unnecessary to estimate σ2 for most purposes unless the statistic chosen is
not invariant with respect to σ2. For each set of pseudo-residuals, calculate a GFS.
Thus, under an assumption of normality, you can form a Monte Carlo distribution for
the goodness-of-fit statistic. Use the distribution to determine a p-value for the original
GFS.
4 With a continuous error distribution, the probability is zero that the maximum likelihood estimates will, in fact, equal the true parameter values, so equality of the sums of squares has probability zero.

17
This method should be reasonable in many cases for its purpose, but some
difficulties exist. If the random errors are not independent and a variance matrix Ω is
known, M can be modified in the familiar way for generalized least squares. However,
generally Ω must be estimated complicating any interpretation between the ε vector and
the residuals. M has dimensions n × n and may be troublesome for especially large
databases. This procedure may not be able to be extended in a straightforward manner
to accommodate other situations that may arise such as non-linear regression or non-
Gaussian error terms. So, the search remains for suitable alternate tests.
18
CHAPTER 2
PRELIMINARIES IN THE DEVELOPMENT OF AN APPROPRIATE LAGRANGE MULTIPLIER TEST
2.1 LAGRANGE MULTIPLIER (LM) TEST5 FOR A UNIFORM DISTRIBUTION
Consider a random sample x = (x1, …, xn)′ from an unknown distribution F(X).
One would like to test:
H0: X ~ U(0,1) vs. H1: Not H0
One could parameterize the alternative hypothesis in the following way:
H1: X ~ G(z) where G(z) = ( )0
1
0 0
1 0 1
1 1
mzj j
j
z
v dv z
z
α φ=
<⎧⎪
⎡ ⎤⎪ + ≤ ≤⎢ ⎥⎨⎢ ⎥⎪ ⎣ ⎦
⎪ >⎩
∑∫ .
To assure that G(1) = 1, {φ j; j = 1, …,m} is chosen so each element, φ j, integrates to
zero on the unit interval. For the set of alternative hypotheses not to contain redundant
representations, {φ j; j = 1, …, m} must contain linearly independent elements.6 It will
also be convenient to require that φ j is bounded on the unit interval. With no additional
definition, the density associated with G can be written as: 5 Such tests are also called “efficient score” tests, just “score” tests, or sometimes “Rao score” tests in honor of the first to suggest this type of test. 6 As will be discussed later, any set of linearly independent functions that integrate to zero may be chosen which will be sensitive to possibly different departures with different power.

19
g(z) = G′(z) = ( )
11 0 1
0 otherwise
m
j jj
z zα φ=
⎧+ ≤ ≤⎪
⎨⎪⎩
∑ (Eq. 2.1.1)
Also, Pr(xi < z) = G(z) for each i ∈ {1, …, n}. It can also be seen that H0 is nested in H1
if one allows for α j = 0, j = 1, …, m. This nesting is what allows the use of a Lagrange
multiplier statistic, since the parameter space of the null hypothesis is a subset of that of
the alternate hypothesis.
Consider α = (α1, …, α m)′ ≠ (0, …, 0). Then for any choice of nonzero basis
functions {φ j}, g(z) is a function different than the uniform density on the unit interval.7
For α near the origin in ℜm, g(z) can be seen as a perturbation of the uniform density,8
using perturbation functions, {φ j; j = 1, …, m}. So, that ( )1
01g z dz =∫ , it is helpful to
choose {φ j; j = 1, …, m} such that ( )1
0 j v dvφ∫ = 0.
The likelihood function of interest is:
L(α;x) = 1
( ; )n
ii
g x α=
∏ ⇒ Λ(α;x) = ( )1
log ;n
ii
g x α=∑ = ( )
1 1log 1
n m
j j ii j
xα φ= =
⎛ ⎞+⎜ ⎟⎜ ⎟
⎝ ⎠∑ ∑ ,
where Λ is the logarithm of the likelihood function. The jth first derivative, evaluated at
α = 0, is:
7 This is guaranteed by the linear independence of the elements of {φ j; j = 1,…,m}. 8Many features, methods of calculation, and inferences of the Pearson χ2 test, the Neyman Ψ2 test (to be discussed at the end of this section), and the proposed spline test are parallel. The differences in the tests are centered on the choice of a basis of perturbation functions.

20
( )
( )( )
1 10
1 0
log
1
n nj i
j imj i i
k k ik
xL xxα
α
φφ
αα φ= ==
= =
∂= =
∂+
∑ ∑∑
,
so the transpose of the “score” vector of first derivatives, evaluated at α = 0, for the LM
Statistic is:
( ) ( ) ( )11 1
0 , ,n n
i m ii i
s x xφ φ= =
⎛ ⎞′ = ⎜ ⎟
⎝ ⎠∑ ∑K
A typical element of the Hessian matrix is:
( ) ( )
( )
2
21
11
n j i j i
mij jk k i
k
x x
x
φ φα α
α φ
′
=′
=
−∂ Λ∂ ∂ ⎡ ⎤
⎢ ⎥⎣ ⎦
= ∑+∑
,
so a typical element of the Fisher information matrix, evaluated at the null hypothesis,
for the LM statistic is:
( ) ( ) ( )
( )( ) ( )
2
0 0 021 1
1
log0
1
n nj i j i
j j j i j imj j i i
k k ik
x xLI E E E x x
xα α α
φ φφ φ
α αα φ
′′ ′= = =
′ = =
=
⎧ ⎫⎪ ⎪
⎛ ⎞ − ⎡ ⎤⎪ ⎪∂= − = − =⎜ ⎟ ⎨ ⎬ ⎢ ⎥⎜ ⎟∂ ∂ ⎡ ⎤ ⎣ ⎦⎪ ⎪⎝ ⎠ +⎢ ⎥⎪ ⎪
⎣ ⎦⎩ ⎭
∑ ∑∑
= ( ) ( ) ( ) ( ) ( ) ( ) ( )1 1
0 00 01 1
;n n
j i j i j i j i i i j ji i
E x x x x g x dx n z z dzα αφ φ φ φ α φ φ′ ′ ′= =
= =
⎡ ⎤ = =⎣ ⎦∑ ∑∫ ∫
The LM statistic is s′(0)I(0)-1s(0). Since the null hypothesis is a point of
dimension zero in ℜm, this statistic is asymptotically distributed as a χ2(m) as n
increases to infinity. The test rejects the null hypothesis in favor of the unspecified
alternative if the LM statistic is greater than a pre-specified percentile of χ2(m).

21
The finite sample distribution for various values of n and m can be tabulated by
Monte Carlo simulation. For a given n, as m is increased, the power of the test relative
to specific alternative distributions was thought to increase, at least to a point. It was
anticipated that m should be an increasing function of n. McCulloch (1971, 1975)
suggests m ≈ n , whereas Li (1997) suggests m = an2/5. Simulations suggested that
different m were more appropriate for particular alternate hypotheses rather than
increasing with some power of n.
Two common estimators of the Fisher information matrix9 are the local
information matrix (the negative of the empirical Hessian of the log likelihood function)
and the Outer Product of the Gradient Estimator (OPG). Both estimators are consistent
estimators for the Fisher information matrix. A typical element of the local information
matrix is, evaluated at the null hypothesis is:
( ) ( )2
10
log n
j i j iij j
L x xα
φ φα α ′
=′ =
∂−
∂ ∂= ∑
The OPG estimator is also an empirical estimator. It is based on the
contributions to the gradient matrix, a typical element of which is:
( ) ( )0
log , ij i
j
L xx
α
αφ
α=
∂=
∂.
The typical element of the OPG matrix is:
( ) ( ) ( ) ( )1 10
log , log ,n ni i
j i j ij ji i
L x L xx x
α
α αφ φ
α α ′′= ==
∂ ∂=
∂ ∂∑ ∑ .
9 See for example Davidson and MacKinnon (1993) or McCulloch (1999)

22
Although in this case the estimators turn out to have the same form, that is not
always the case. In general, since the Hessian and the OPG depend on the sample rather
than the expectation, there is additional error included that inherently makes inferences
poorer than if the Fisher information matrix can be computed.
2.2 TECHNICAL CONSIDERATIONS
There are two technical points to discuss. The first of these is a requirement that
the parameter space for the null hypothesis is not on the boundary of the parameter
space for the alternative hypothesis (with the parameter space being defined as those
α that allow g to be a legitimate density).10 Intuitively, α = 0 is an interior point of the
parameter space, since at α = 0, g(z;α) = 1, for all values of z on the unit interval; and,
evidently, under the null hypothesis, there is a limiting local maximum at α = 0 as the
sample size increases to infinity. A more formal proof of the origin being an interior
point follows:
Proof. Since φ j integrate to zero, g(z;α) will integrate to one regardless of the choice of α. So it is sufficient to show that a neighborhood exists around α = 0 such that g(z;α) ≥ 0, for all z. Since each φ j is bounded on the unit interval, let
max ,j j jM U L⎡ ⎤= −⎣ ⎦ where Uj is the upper bound of φ j and Lj is the lower
bound. Further define { }max jjM M= . Now define a neighborhood around zero
by {α = (α1, …, αm) : { }1 , 1, ...,j j mmM
α ≤ ∀ ∈ }. Then, g(z;α) = 1 + α′ϕ(z)
where ϕ(z) = (φ1(z), …, φm(z))′, which is always nonnegative based on the inequality below:
( ) ( )1 1
1; 1 1 1 1 0m m
j jj j
g z z M M MmmM
α α ϕ α α= =
′= + ≥ − ≥ − ≥ − =∑ ∑
10 See Rayner and Best (1989), p. 34.
23
So, all elements of 1: jAmM
α α⎧ ⎫= ≤⎨ ⎬⎩ ⎭
% produce valid densities and the origin is an
interior point of that set.
Certainly there are values of Aα ∉ % that also produce densities. Next, it will be
shown that all values of α that allow g to remain nonnegative everywhere on the unit
interval are in a convex set in ℜm. So, the null hypothesis will be shown to be an
interior point of a convex parameter space.
As has been stated, g(z;α), is not a probability density function for some choices
of α. Although care was taken in the construction of g so that it would integrate to one
over the unit interval, some choices of α could cause g to be negative over some portion
of that interval. Were we constructing a likelihood ratio statistic, this would be more
troublesome, since the maximum likelihood estimate of α would have to be constrained
to choices that allowed g to be a legitimate density function. It is expected that for most
problems, an unconstrained11 maximum likelihood estimator may not even exist.12
However, the Lagrange multiplier statistic does not require calculation of the
unconstrained maximum likelihood statistic. It merely requires a comparison of the
gradient (roughly, slope) relative to the Hessian (roughly, curvature), evaluated at the
null hypothesis. If the judgment is that the gradient is near enough to zero, then the null
is not rejected. Nearby α’s to the α = 0 point of the null hypothesis will be densities as
11 Since g is constructed to integrate to 1 over the unit interval, choices of α that allow g to be negative over regions of the unit interval that do not contain data allow the “likelihood” function to increase, possibly without limit, over regions that do contain data, which would cause the function to be unbounded. It should also be noted that some non-density g’s will cause the “likelihood” function to take negative values, if an odd number of observations occur in the region on which g is negative. 12 A constrained likelihood may exist depending on the choice of basis functions.

24
will be shown more formally relative to the previous technical point addressed. In fact,
all the g(z;α) that are legal densities are near one another in the sense that the values of
α that allow g to remain nonnegative are in a convex set in ℜm.
Proof. Let α = (α1, …, αm)′ ∈ ℜm, ϕ(z) = (φ1(z), …, φm(z))′. Assume the contrary: at least one of the densities is not in a common convex region of ℜm. Then there must be at least one function g(z;ω) that becomes negative at some point z0 ∈ [0,1], such that ω is a convex combination13 of ξ and ζ, where g(z;ξ) and g(z;ζ) are nonnegative everywhere on the unit interval.14
So, g(z0; tξ + (1-t)ζ) = 1 + ( tξ + (1-t)ζ)′ϕ(z0) < 0 ⇒ tξ′ϕ(z0) + (1-t)ζ′ϕ(z0) < -1 Since g(z0;ξ) = 1 + ξ′ϕ(z0) ≥ 0 and g(z0;ζ) = 1 + ζ′ϕ(z0) ≥ 0, tξ′ϕ(z0) + (1-t)ζ′ϕ(z0) ≥ -t – (1-t) = -1, which is a contradiction.
So, the assumption that g(z;ω) becomes negative at some point z0 ∈ [0,1] is impossible
and, thus, the densities are in a convex region of ℜm.
2.3 SPLINE LAGRANGE MULTIPLIER TEST FOR A UNIFORM
DISTRIBUTION
It is required that ( )1
0 j v dvφ∫ = 0; one way of assuring this is to choose any set
of functions {ψj} that are integrable over [0,1] and with ψ j(z) = Ψj′(z), and define
φ j(z)= ψ j(z) - ( )1
0 j v dvψ∫ , since ( )1 1
0 0( )j jv u du dvψ ψ⎡ ⎤−⎢ ⎥⎣ ⎦∫ ∫ =
( ) ( ){ } 11
0 0
vuj j u v
v v u==
= =⎡ ⎤Ψ − Ψ⎣ ⎦ = Ψj(1) − [Ψj(1) − Ψj(0)] − Ψj(0) = 0 .
If we wanted to define a cubic spline, we could, for example, define
13 ω = tξ + (1-t)ζ for some t ∈ [0,1] 14 ω,ξ, and ζ are all choices of α ∈ ℜm

25
( ) 3
1, 2
3max , 0 3, 4, ,2
j
j
z j
z jz j mm
ψ
⎧ =⎪⎪ ⎧ ⎫= ⎨ −⎪ ⎪⎛ ⎞− =⎨ ⎬⎜ ⎟⎪ −⎝ ⎠⎪ ⎪⎪ ⎩ ⎭⎩
K.
The bottom functional form can be visualized as translating the function z3+, such that
its origin is at each of the set of points {0, (m-2)-1, 2(m-2)-1, …, (m-3) (m-2)-1}, where
33 0
0 0z zz
z+ ⎧ ≥⎪= ⎨
<⎪⎩, the positive portion of z3.
The value, first derivative and second derivative of the ψ j’s are zero at 23
−−
mj , where
the positive portion of the function begins; so, the addition of a multiple of ψ j to a
cubic function (or to a different cubic spline) results in a cubic spline. Thus, this set of
ψ j’s form a basis for cubic splines with equidistant knots on [0,1].15
It appears that, using the cubic spline basis, the Fisher information matrix can be
calculated directly, so reliance on estimates in this case is unnecessary. The φ’s that are
in the integrand of the typical element of this Fisher information matrix are cubic
polynomials over part of their range and constant functions over the other part. So, it is
only necessary to integrate zero-degree, cubic and sextic polynomials. Thus, we must
evaluate linear, quartic and septemic polynomials at zero, one, and all knotpoints.
Some benefits and concerns of this type of basis will be presented in the next chapter.
There is nothing a priori to compel the selection of cubic splines instead of
quadratic or linear splines. In fact even an exponentiated spline, using expressions of 15 A spline is a function of a given number m of piecewise polynomials (or some other general function) of a given degree n, each defined on a subset of a range, connected at m-1 points in the range, called nodes or knots, such that the values and derivatives up to degree m-1 of consecutive polynomials are identical at the nodes. Thus, cubic splines require values and first and second derivatives of consecutive cubic polynomials to be equal at the knots.

26
the form “ ( )exp j jα φ ” in the alternative hypothesis, may be a reasonable basis for a
test.16 Quadratic and cubic splines are more aesthetic than linear splines in constructing
likely alternative densities in that their knots are not discernible since the first
derivatives of contiguous polynomials are equal. Cubic splines perhaps are to be
preferred to quadratic splines since they are allowed to bend twice in a subinterval so
they may be better at imitating the tails of some alternative distributions, but that
characteristic may be at the expense of some other desired feature.
At this point, it can be noted that the Pearson χ2 test is equivalent to a zero-
degree spline GFT for a continuous distribution. Recall the structure of the hypotheses:
H0: pj = pj0 , j = 1, …, m+1 vs. H1: Not H0
If each of the pj0 is set to a constant p, then H0 becomes the uniform discrete
distribution. So a random sample, x = (x1, …, xn)′ from an unknown distribution F(X)
can be tested using:
H0: X ~ U(0,1) vs. H1: X ~ G(z)
where g(z) can be of the form of equation Eq. 2.1.1, H1:17
16 Please see Appendix E for a proof that the proposed LM statistic is invariant to linear combinations and exponentiation of basis functions, regardless of whether the basis functions are polynomials, splines, or some other bounded function. 17 There are alternative representations as well, with one being:
g(z) = ( )1
1m
k kk
zα φ=
+ ∑ , where, ( ) [ ]1
11
,, 1, ,
10 0,1
otherwise
k km m
k
m
k mz
z zφ
−
−
⎧ ⎡ ⎤⎣ ⎦⎪=⎨
⎪⎩
∈= ∉
−K

27
g(z) = ( )1
1m
k kk
zα φ=
+ ∑ , where, ( ))1
1 1
1
1 ,
1 ,1 , 1, ,
0 otherwise
k km m
mk m
z
z z k mφ
−+ +
+
⎧ ⎡∈ ⎣⎪⎪ ⎡ ⎤= − ∈ =⎨ ⎣ ⎦⎪⎪⎩
K .
This zero-degree spline Lagrange multiplier test statistic (ZSLM) would be formed in
the same way as that of the cubic spline Lagrange multiplier test statistic (CSLM), by
using the score vector and Fisher information matrix indicated by the log likelihood
function.
The score evaluated at the null hypothesis is:
( ) ( ) ( )11 1
0 , ,n n
i m ii i
s x xφ φ= =
⎛ ⎞′ = ⎜ ⎟
⎝ ⎠∑ ∑K ,
a typical element of which would be (nj - nm+1), where nj is the number of observations
in the jth bin, or in the interval [ 11 1,j j
m m−+ + ) and nm+1 is the number of observations in the
last bin, or in the interval [ 1 ,1mm+ ].
A typical element of the Fisher information matrix is
( ) ( ) ( )1
00j j j jI n z z dzφ φ′ ′= ∫ ,
so diagonal elements are 21
nm+ and off-diagonal elements are 1
nm+ . Such a matrix is easy
to invert, with the inverse’s diagonal elements being mn and the off-diagonal elements
equal to 1n− .
2.4 B-SPLINE BASIS
Although the theoretical choice of a basis allows for any set of linearly
independent bounded functions, there are numerical considerations in choosing a basis

28
so that reasonable results can be obtained. The simple cubic spline basis pictured below
with seven members has a Fisher information matrix that is poorly conditioned for
inversion for large m. The seventh member is barely visible ranging from a minimum
value of -0.0004 to a maximum of 0.0076 which would necessitate that its coefficient
might be 2 to 3 orders of magnitude greater than a coefficient from one of the first few
basis members. The difference in magnitude increases greatly as m increases.
-0.5
-0.25
0
0.25
0.5
0.75
0 0.2 0.4 0.6 0.8 1
Figure 2.1. Simple cubic spline basis vectors for m=7

29
Another basis for splines, typically called B-splines,18 and the one that is used in
the new Lagrange multiplier test, is presented below; it is visually shown in Figure 2.2.
It has the advantage that all the basis members are of the same order of magnitude and
the Fisher information matrix will be dominated by a strong diagonal and be nearly
sparse. Using B-splines, the linear spline matrix will be nearly tridiagonal, the
quadratic spline matrix will have larger values on the main diagonal plus the four
diagonals nearest the main diagonal, while the cubic spline matrix will have its largest
values on the seven main diagonals. As such, this choice of bases is much better
conditioned for inversion of Fisher information matrices and for accumulating the
corresponding scores.
In general, B-splines of order k (k=1 corresponding to linear splines, k=2
corresponding to quadratic splines, k=3 corresponding to cubic splines, and so on)
require k+1 basis functions for the first segment, with the requirement of adding one
basis function for each additional segment. However, the splines that we are interested
in have a requirement of integrating to zero over the unit interval. Consequently, we
can construct the splines with one fewer basis function.
Linear B-spline functions look like “tent” functions increasing linearly from
zero to a maximum from one knot point to the next, then decreasing from that
maximum back to zero. Since this application requires the functions to integrate to zero
on [0,1], these “tents” will be translated downward so that some of their range will be
negative.
18 See Judd, p. 227

30
The functional form for the linear spline basis with m equal segments (and m+1
knots) is shown below. Superscripts of “1” will distinguish these basis functions from
the quadratic spline basis functions, which have a superscript of “2” and the cubic
spline basis functions which have a superscript of “3”:
( ) ( )1 1 1, 0,1, , 1i i ix x c i mφ ψ= − = −K , where
( )1
1 2 1 2
ifif
0 otherwise
i i im m m
i i ii m m m
x xx x xψ
+
+ + +
⎧ − ≤ ≤⎪= − ≤ ≤⎨⎪⎩
and{ }2
2
11
12
if 0,1, , 2
if 1m
im
i mc
i m
⎧ ∈ −⎪= ⎨= −⎪⎩
K.
It must be understood that the functions need not be defined outside the unit interval.
For ease of exposition, that contingency is ignored. For example, the second segment
of ψm-11 by the above definition is defined on the interval [1, (m+1)/m] but is
unnecessary for this application.
If the segments are unequal in length, one can substitute {x0 , x1 , …, xm} for
{ }0,1, ,im i m= K as boundaries for the various domain segments in the above formula,
where x0 and xm substitute for zero and one, respectively, while x1, x2, …, xm-1 are the
desired knot points.
The formula for quadratic splines is a bit more complicated with three non-
trivial expressions defining each basis function. In addition, there must be one more
function than in the basis for the linear spline to produce the same number of
polynomial segments in the quadratic spline; so with m basis functions, one can
describe only m-1 quadratic segments and m-2 knots.
( ) ( )2 2 2 , 1, 0,1, , 2i i ix x c i mφ ψ= − = − −K , where

31
( )
( )( ) ( ) ( ) ( )
( )
2 11 1 1
2 3 1 1 21 1 1 1 1 12
23 2 31 1 1
if
if
if
0 otherwise
i i im m m
i i i i i im m m m m m
ii i im m m
x x
x x x x xx
x xψ
+− − −
+ + + + +− − − − − −
+ + +− − −
⎧ − ≤ ≤⎪⎪ − − + − − ≤ ≤⎪= ⎨⎪ − ≤ ≤⎪⎪⎩
and
( )
( ){ }
( ){ } { }
( )
( )
3
3
3
3
3
43 1
53 1
623 1
53 1
13 1
if 1& 1 1
if 1& 1 2,3,
if 0,1, , 4 & 1 3, 4,
if 0 & 3
if 2
m
m
i m
m
m
i m
i m
i m mc
i i m
i m
−
−
−
−
−
⎧ = − − =⎪⎪ = − − ∈⎪⎪ ∈ − − ∈= ⎨⎪
≥ = −⎪⎪
= −⎪⎩
K
K K .
The formula for cubic splines has four non-trivial expressions defining each
basis function. The m basis functions describe m-2 cubic segments and the
corresponding m-3 knots.
( ) ( )3 3 3, 2, 1, 0,1, , 3i i ix x c i mφ ψ= − = − − −K , where
( )
( )( ) ( ) ( )( )( ) ( )( )( )( ) ( )( )( ) ( ) ( )
( )
3
3 12 2 2
2 22 3 1 4 1 1 22 2 2 2 2 2 2 2 2
2 23 4 1 3 4 2 2 32 2 2 2 2 2 2 2 2
34 3 42 2
if
if
if
if
i
i i im m m
i i i i i i i i im m m m m m m m m
i i i i i i i i im m m m m m m m m
i i im m m
x
x x
x x x x x x x x
x x x x x x x x
x x
ψ
+− − −
+ + + + + + +− − − − − − − − −
+ + + + + + + +− − − − − − − − −
+ + +− − −
=
− ≤ ≤
− − + − − − + − − ≤ ≤
− − + − − − + − − ≤ ≤
− ≤ ≤ 2
0 otherwise
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
32
and
( ){ }
( ){ }
( )
( ){ }
( ){ } { }
( )
( )
( )
4
4
4
4
4
4
4
4
114 2
124 2
224 2
234 22
244 2
234 2
124 2
14 2
if 2, 1 & 2 1
if 2 & 2 2,3,
if 1& 2 2
if 1& 2 3, 4,
if 0,1, , 6 & 2 4,5,
if 0 & 5
if 0 & 4
if 3
m
m
m
mi
m
m
m
m
i m
i m
i m
i mc
i m m
i i m
i i m
i m
−
−
−
−
−
−
−
−
⎧ ∈ − − − =⎪⎪ = − − ∈⎪⎪ = − − =⎪⎪ = − − ∈⎪⎪= ⎨
∈ − − ∈⎪⎪
≥ = −⎪⎪⎪ ≥ = −⎪⎪ = −⎪⎩
K
K
K K.
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
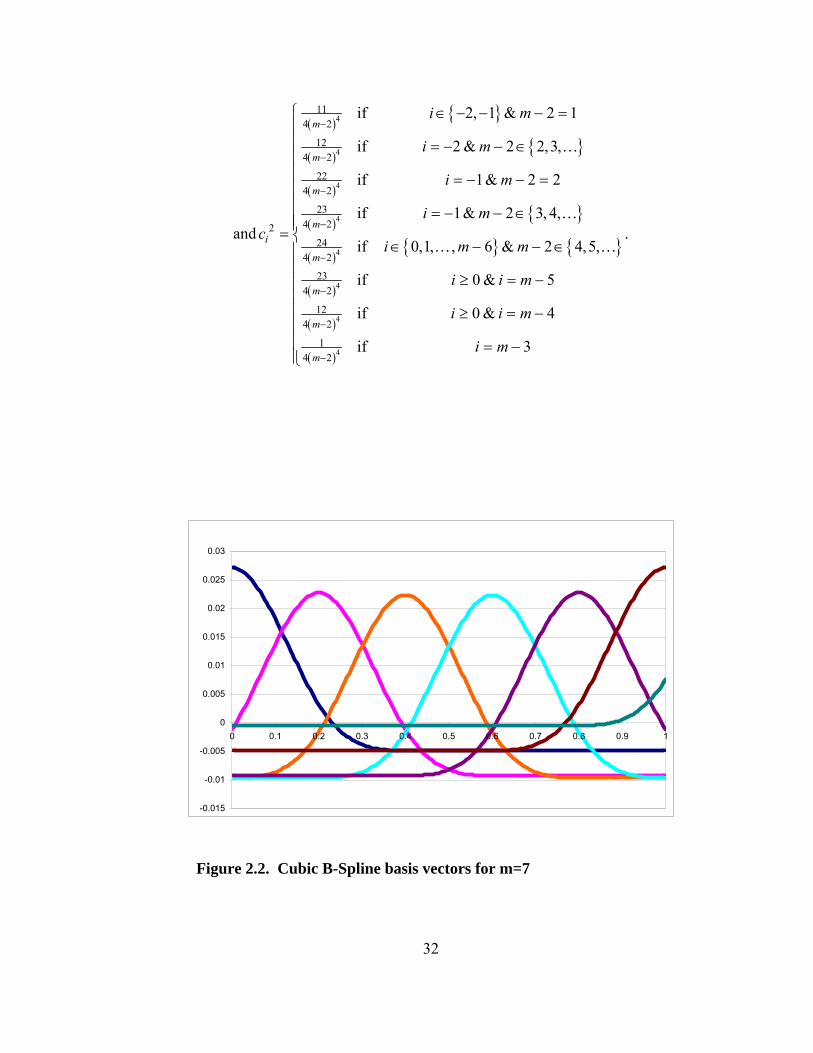
Figure 2.2. Cubic B-Spline basis vectors for m=7

33
Figure 2.2 is an illustration of a seven-function basis for cubic B-splines. Note
that there are 3 pairs of mirror-image functions and a function that is a bit below zero on
[0,0.8] and rising cubically on [0.8,1].
Starting from the left, the first and sixth basis functions contain only two cubic
segments (not including the constant segment). The second and fifth functions contain
three cubic segments, the third and fourth functions are the only ones that contain all
four cubic segments, while the seventh function contains only one cubic segment.
2.5 NEYMAN’S SMOOTH TEST
A GFT to which the CSLM is also closely related would be Neyman’s smooth
test.19 Smooth tests were so named because the alternative distributions varied
“smoothly” away from the null hypothesized distribution. Neyman called this test a Ψ2
test (which can be contrasted with Pearson’s χ2 test). Neyman constructed an
alternative hypothesis of order m (to a null of a uniform random variable on [0,1] ) to be
( ) ( ) ( )1
; expm
m j jj
g z K zα α α π=
⎧ ⎫⎪ ⎪= ⎨ ⎬⎪ ⎪⎩ ⎭∑ , 0 ≤ z ≤ 1, m = 1,2,…
where K(α) is the constant necessary for gm to be a density, and the πj are orthonormal
polynomials of degree j that integrate to zero on the unit interval. As in the general
case, the null hypothesis is that α = 0. With the exponentiation, there is no problem
with gm(z;α) taking negative values. We can reparameterize Neyman’s alternative as
19 See Rayner and Best (1989), p.7 and p.46-48. The choices of indices, variable and parameter names have been changed to show the parallel with the CSLM and ZSLM.

34
gm(z;α) = ( )
( )
1
1
01
exp 1
exp 1
m
j jj
m
j jj
z
z dz
α π
α π
=
=
⎧ ⎫⎪ ⎪+⎨ ⎬⎪ ⎪⎩ ⎭⎧ ⎫⎪ ⎪+⎨ ⎬⎪ ⎪⎩ ⎭
∑
∑∫, 0 ≤ z ≤ 1, m = 1,2,…
With this parameterization, the integral in the denominator is a constant depending on
the α vector of which can be represented by C(α) = ( )e
K α . Neyman’s test statistic is
Ψ2m=
( )2
1 1where
m nj i
j jj i
yU U
n
π
= =
=∑ ∑ . This test statistic is asymptotically χ2(m) .
Neyman expected that values of m of 4 or 5 would be sufficient to test a large enough
class of alternatives. Ψ2m was a likelihood ratio test statistic rather than a Lagrange
multiplier statistic. Since Neyman thought an m of 4 or 5 would be sufficient, it was not
necessary in practice to compute K(α) for larger values of m. To change this to a
Lagrange multiplier test with possibly larger values of m, which is concerned with
perturbations only in the neighborhood of the null hypothesis, it will be convenient to
simplify calculations by substituting a regular polynomial form in place of Neyman’s
exponentiated polynomial.
Using this structure, one definition could be:
g(z) = ( )1
1m
j jj
zα φ=
+ ∑ , where, ( ) [ ]11 0,1
0 otherwise
jj
jz z
zφ +⎧ − ∈⎪= ⎨⎪⎩
.
The corresponding LM test statistic, which is identical to an LM test statistic based on
an exponentiation, is formed in the same way as shown in Chapter 2.1, by using the
score vector and Fisher information matrix indicated by the log likelihood function:

35
Score: ( ) ( ) ( )11 1
0 , ,n n
i m ii i
s x xφ φ= =
⎛ ⎞′ = ⎜ ⎟
⎝ ⎠∑ ∑K , a typical element of which would be
1 1
nj
ii
nxj=
−+∑ . A typical element of the Fisher information matrix is
( ) ( ) ( )1
00j j j jI n z z dzφ φ′ ′= ∫ , or
1 1 11 10
( )( )( 1)( 1)( 1)
j jj j
njjn z z dzj j j j
′′+ +
′− − =
′ ′+ + + +∫ .
One difference between the CSLM test and Neyman’s test is that the CSLM is
more sensitive to differences that are local to a specific part of the unit interval.
Because Neyman’s exponentiated polynomials were defined over the entire interval,
each polynomial affected the likelihood of every data point. For this reason,
polynomials have to make compromises since, in order to fit one point better, it may be
necessary to fit other points that are not nearby more poorly. Splines are more pliable
and better able to fit points in a particular interval without affecting more distant
intervals as much. Additionally, higher-powered polynomials are computationally more
troublesome because of significant rounding errors when adding together terms with
greatly varying orders of magnitude between their coefficients.
“Experience with polynomials derived by truncating [Taylor]20 series[, especially in their use with estimating transcendental functions,] may mislead one into thinking that the use of high order polynomials does not lead to computational difficulties. However it must be appreciated that truncated [Taylor] series are not typical of polynomials in general. [Truncated Taylor series] have the special feature that the terms decrease rapidly in size for values of x in the range for which they are appropriate. A tendency to underestimate the difficulties involved in working with general polynomials is perhaps a consequence of one’s experience in classical analysis. There it is natural to regard a polynomial as a very desirable function since it is bounded in any finite region and has derivatives of all orders. In numerical work, however, polynomials having
20 Text uses the term “power” instead of Taylor
36
coefficients which are more or less arbitrary are tiresome to deal with by entirely automatic procedures.”21
Although there is more initial work to calculating and understanding splines,
they have some numerical properties that are more desirable than polynomials while the
tradeoff in the other properties is not severe. Splines retain the polynomial properties of
being bounded in any finite region and have derivatives of all orders at all points
excluding the relatively small finite number of knotpoints. Other concerns about
rounding are contained in Appendix G.
The Pearson, Neyman, and spline tests are all meet the criteria of the Neyman-
Pearson lemma against simple alternatives. So, it is expected that each test will work
better for alternatives that are of the form determined by their respective perturbing
functions. Tests with other bases of perturbing functions should be better for still other
distributions.
2.6 SIMPLE POLYNOMIAL BASIS
For practical computations with most software using double precision with 32-
bit processors, a basis of simple restricted polynomials, {xm – (m + 1)-1}, m = 1,2, …,
will likely be difficult to work with as m increases since the rows of the Fisher
information matrix are nearly linearly dependent.
It is very easy to compute the cells of such matrices. Each cell is
( ) ( ) ( )1 1 1ij
i j i j+ + + + where i is the row index and j is the column index. However,
21 Wilkinson, J. H., Rounding Errors in Algebraic Processes, p.38
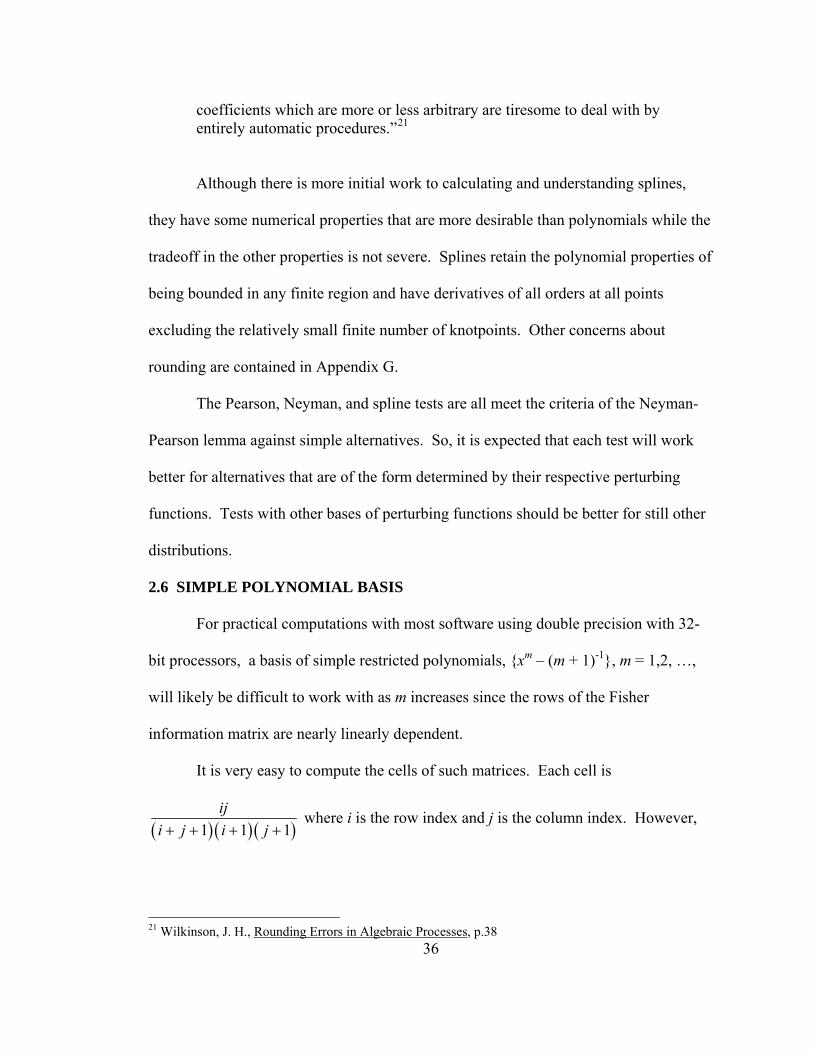
37
the determinants of the first 12 such matrices show that ill-conditioning occurs quite
rapidly and accelerates even faster:
M 1 2 3 4 5 6 Det 8.33e-02 4.63e-04 1.65e-07 3.75e-12 5.37e-18 4.84e-25
M 7 8 9 10 11 12
Det 2.73e-33 9.72e-43 2.16e-53 3.02e-65 2.64e-78 1.44e-92
Figure 2.3. Determinants of Fisher information matrices from first 12 simple polynomial bases
The first and third rows indicate the number of columns (and rows) in the
matrices and the second and fourth rows show the determinants. The determinant is
getting ever smaller at a faster and faster rate. So, the hope of obtaining meaningful
numerical inverses with conventional precision beyond the first few matrices is bleak.
A closer look at the 8 × 8 matrix shows two characteristics of these matrices: a
non-dominant main diagonal and rows that are nearly multiples of one another.

38
0.0833 0.0833 0.0750 0.0667 0.0595 0.0536 0.0486 0.04440.0833 0.0889 0.0833 0.0762 0.0694 0.0635 0.0583 0.05390.0750 0.0833 0.0804 0.0750 0.0694 0.0643 0.0597 0.05560.0667 0.0762 0.0750 0.0711 0.0667 0.0623 0.0583 0.05470.0595 0.0694 0.0694 0.0667 0.0631 0.0595 0.0561 0.05290.0536 0.0635 0.0643 0.0623 0.0595 0.0565 0.0536 0.05080.0486 0.0583 0.0597 0.0583 0.0561 0.0536 0.0510 0.04860.0444 0.0539 0.0556 0.0547 0.0529 0.0508 0.0486 0.0465
⎡ ⎤⎢ ⎥⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣ ⎦
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
This suggests the topic of the next section: If a simple basis does not work, why not try
an orthogonal one?
2.7 ORTHOGONAL POLYNOMIAL BASIS
Alternatively, one can search for orthogonal polynomials so that the Fisher
information matrix is diagonal with an uncomplicated inverse. A recursive formula for
Legendre-type polynomials is shown below. The Legendre polynomials are typically
defined on the range [-1,1], so a change of variable is necessary so that the resultant
polynomials are orthogonal on our range of interest, [0,1].
Let p0(x) = 1 and p1(x) = 2x – 1. Then a recursive formula which will generate
as many orthogonal polynomials as necessary on [0,1] is:
pm+1 = [(2m + 1)(2x – 1) pm(x) – m pm-1(x)] / (m + 1), m = 1,2, …,
with ( )21
0
12 1mp x dx
m⎡ ⎤ =⎣ ⎦ +∫ , while, as designed, ( ) ( )1
00, if .m kp x p x dx m k⎡ ⎤ ⎡ ⎤ = ≠⎣ ⎦ ⎣ ⎦∫
The first few such polynomials are:
p0(x) = 1
p1(x) = 2x – 1
p2(x) = 6x2 - 6x + 1
39
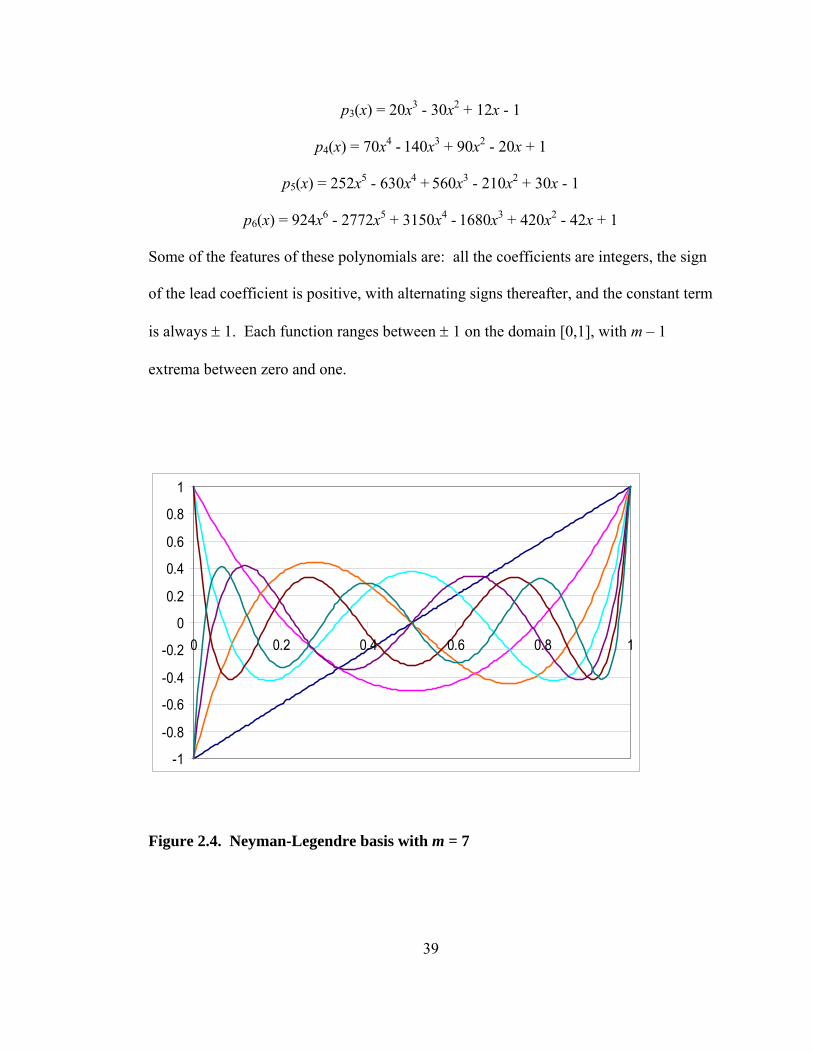
p3(x) = 20x3 - 30x2 + 12x - 1
p4(x) = 70x4 - 140x3 + 90x2 - 20x + 1
p5(x) = 252x5 - 630x4 + 560x3 - 210x2 + 30x - 1
p6(x) = 924x6 - 2772x5 + 3150x4 - 1680x3 + 420x2 - 42x + 1
Some of the features of these polynomials are: all the coefficients are integers, the sign
of the lead coefficient is positive, with alternating signs thereafter, and the constant term
is always ± 1. Each function ranges between ± 1 on the domain [0,1], with m – 1
extrema between zero and one.
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Figure 2.4. Neyman-Legendre basis with m = 7

40
The illustration above shows the first seven members of the Neyman-Legendre
type basis. Although now the Fisher information matrix is easy to compute, the other
component of the Lagrange multiplier statistic, the score, can become problematic
numerically as m increases because the relative magnitudes of the coefficients of the
polynomials grows very rapidly. As an example, for m = 24, the coefficients of the 13th
through 21st powers of x are on the order of 1016, whereas the constant term still has a
coefficient on the order of 100. Since most software carries only 16 significant digits in
its calculations, even with the use of Horner’s rule of polynomial evaluation,22 the
score, which is the sum of a number (equal to the sample size) of such polynomial
evaluations can be expected to pick up some significant errors for large m.
However, one can still obtain reasonable numerical results for values of m
beyond that which are obtainable with the simple polynomial basis.
22The evaluation of a standard polynomial, pm(x) = cmxm + … + c1x + c0 by successive multiplications instead of exponentiation: ((…(cmx + cm-1) x + cm-2) x + … + c1) x + c0
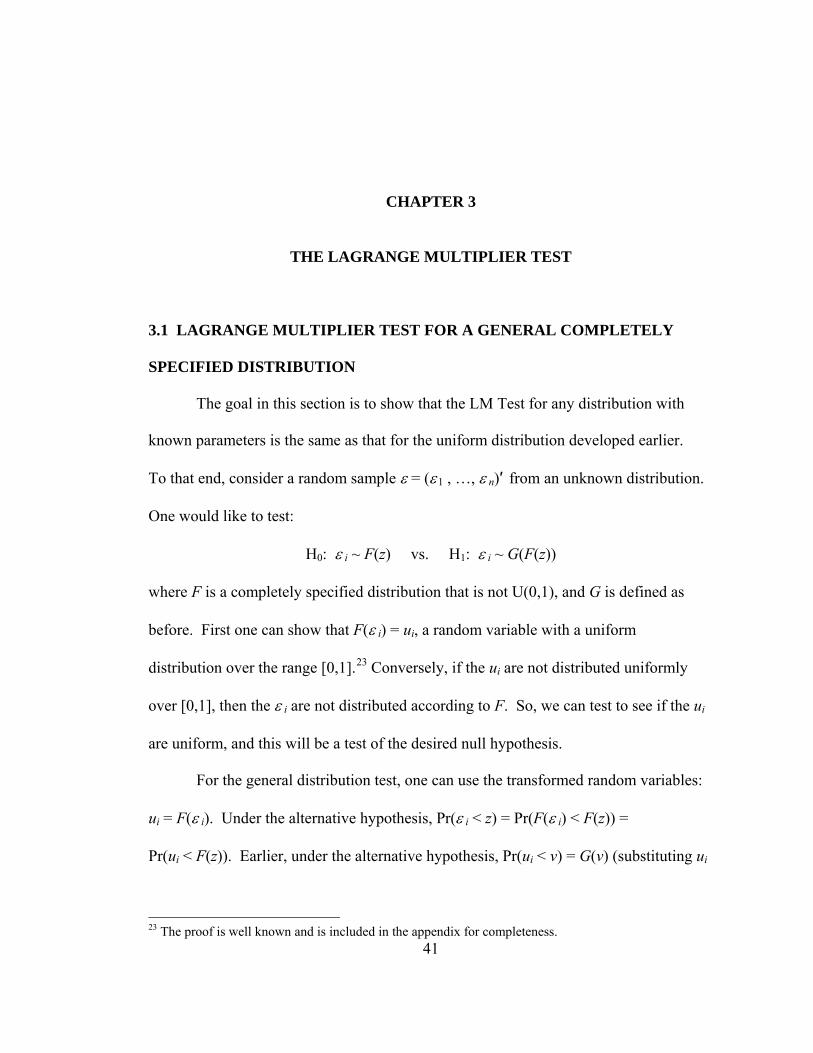
41
CHAPTER 3
THE LAGRANGE MULTIPLIER TEST
3.1 LAGRANGE MULTIPLIER TEST FOR A GENERAL COMPLETELY
SPECIFIED DISTRIBUTION
The goal in this section is to show that the LM Test for any distribution with
known parameters is the same as that for the uniform distribution developed earlier.
To that end, consider a random sample ε = (ε 1 , …, ε n)′ from an unknown distribution.
One would like to test:
H0: ε i ~ F(z) vs. H1: ε i ~ G(F(z))
where F is a completely specified distribution that is not U(0,1), and G is defined as
before. First one can show that F(ε i) = ui, a random variable with a uniform
distribution over the range [0,1].23 Conversely, if the ui are not distributed uniformly
over [0,1], then the ε i are not distributed according to F. So, we can test to see if the ui
are uniform, and this will be a test of the desired null hypothesis.
For the general distribution test, one can use the transformed random variables:
ui = F(ε i). Under the alternative hypothesis, Pr(ε i < z) = Pr(F(ε i) < F(z)) =
Pr(ui < F(z)). Earlier, under the alternative hypothesis, Pr(ui < v) = G(v) (substituting ui
23 The proof is well known and is included in the appendix for completeness.

42
for xi and v for z), where G is the same G as defined in Chapter 2.1. So, Pr(ε i < z) =
Pr(ui < F(z)) = G(F(z)).
The density associated with G(F(z)) is g(F(z))f(z), by the chain rule, where
g(z) = ( )1
1m
j jj
zα φ=
+ ∑ and f = F′. The likelihood and log-likelihood functions are:
L(α;ε) = ( )1
( ; )n
i ii
g u fα ε=
∏ ⇒ Λ(α;ε) = ( ) ( )1
log ;n
i ii
g u fα ε=∑
= ( ) ( )1 1
log ; logn n
i ii i
g u fα ε= =
+∑ ∑ .
Since the second summation is constant relative to α, the first and second
derivatives necessary to calculate the LM statistic are identical to those of the test for
the uniform distribution. Thus, one can simply use the transformed observations, F(ε i),
with the test for the uniform distribution. All tables and critical values that are suitable
for the test of uniformity are also suitable for a general distribution.
3.2 FINITE SAMPLE PROPERTIES WITH A COMPLETELY SPECIFIED
DISTRIBUTION
The Lagrange multiplier statistic has a limiting asymptotic distribution that is
chi-squared with degrees of freedom equal to m, the number of perturbation parameters.
Preliminary simulations suggested that for n ≥ 30 (sample size), m ≥ 5, and level of
significance = 0.05, the convergence to the limiting distribution is quite rapid. At the
alluded values of m, n, and test size, the 95th percentile of the simulated distributions
could not be distinguished from the 95th percentile of a chi-squared random variable. If

43
a lower level of significance is required, a higher sample size will be needed to use the
chi-square approximation.
Pearson Size Distortion (m=6)
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1Cumulative Probability
Diff
eren
ce
n=30 n=100 n=300 n=1000 Upper Lower
`
Figure 3.1. Size distortion of Pearson test; difference between chi-square distribution and empirical distribution

44
Figure 3.1 shows some results from a simulation with 9999 repetitions.24 There
is not much size distortion even for relatively small sample sizes and virtually
undetectable distortion for n ≥ 300. The dashed line that appears ellipse-like indicates
95% upper and lower confidence limits of where a cumulative empirical distribution of
random draws from the chi-square distribution would be expected to lie. Since there
were 9999 repetitions, the equation for the confidence limits is:
Upper and Lower( )1
Confidence Limits = 1.969999
p p−± .
Differences for sample sizes of 30 and 100 appear jagged and non-distortion
free. In large part this is due to the empirical Pearson statistic having a discrete
distribution, which is being compared to the continuous chi-square distribution. When
n ≥ 300, even the discreteness of the Pearson statistic is not enough to cause differences
from the chi-square distribution that are significantly different than zero.
A nice feature shown in Figure 3.2 is that the size distortion is even lower in the
tail of the distribution, which is the focus of hypothesis testing.
24 In this study the number of simulation repetitions is consistently chosen to be 10h-1 where h is an integer, rather than 10h, so that the size (Type I error) of the tests that use the simulated results will be more accurate. Then for a given size (ξ), assuming that 10h(1- ξ) is an integer, the order statistic with the index 10h(1-ξ) can be used as the critical value. We could use 10h instead and interpolate between the integers immediately above and below (10h+1)(1-ξ) to get to the mixed number (10h+1)(1-ξ). However, this involves one more calculation. It also involves an assumption that the c.d.f., which may be unknown, is linear, at least near where the critical order statistics are expected to be. Although the difference from linearity may be slight if the number of simulations is great enough, it is not necessary to make such an assumption with the proper selection of the number of repetitions.
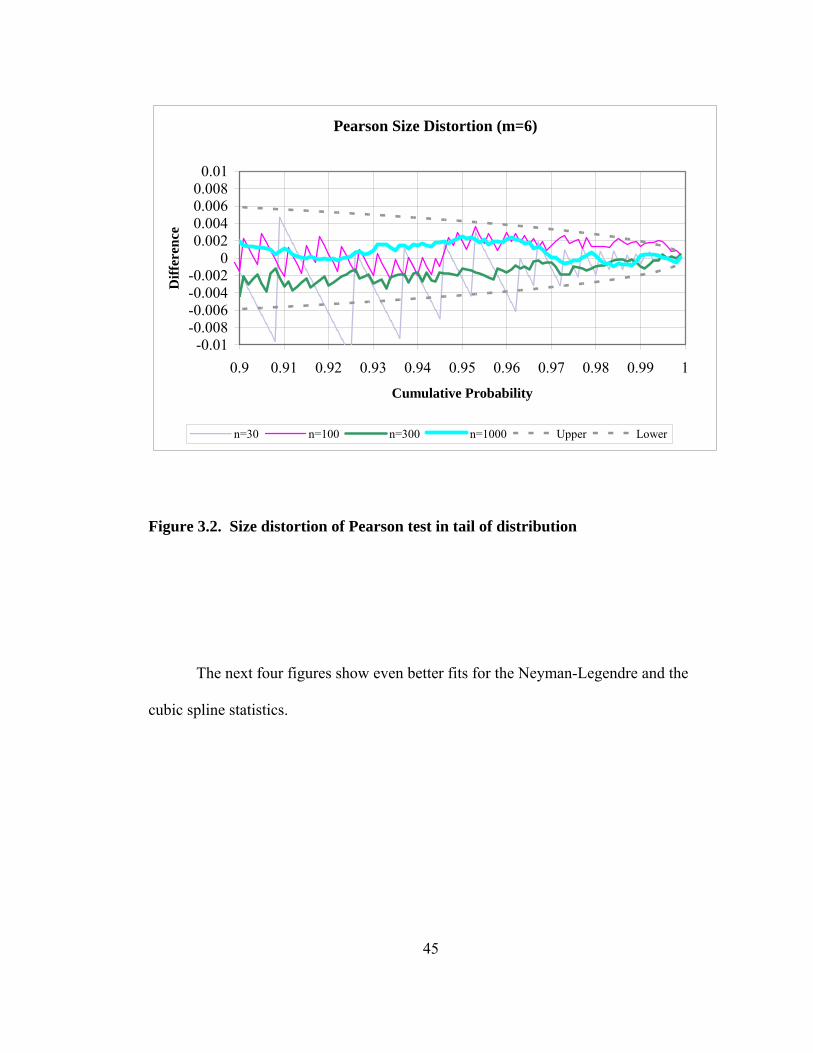
45
Pearson Size Distortion (m=6)
-0.01-0.008-0.006-0.004-0.002
00.0020.0040.0060.0080.01
0.9 0.91 0.92 0.93 0.94 0.95 0.96 0.97 0.98 0.99 1
Cumulative Probability
Diff
eren
ce
n=30 n=100 n=300 n=1000 Upper Lower
Figure 3.2. Size distortion of Pearson test in tail of distribution
The next four figures show even better fits for the Neyman-Legendre and the
cubic spline statistics.
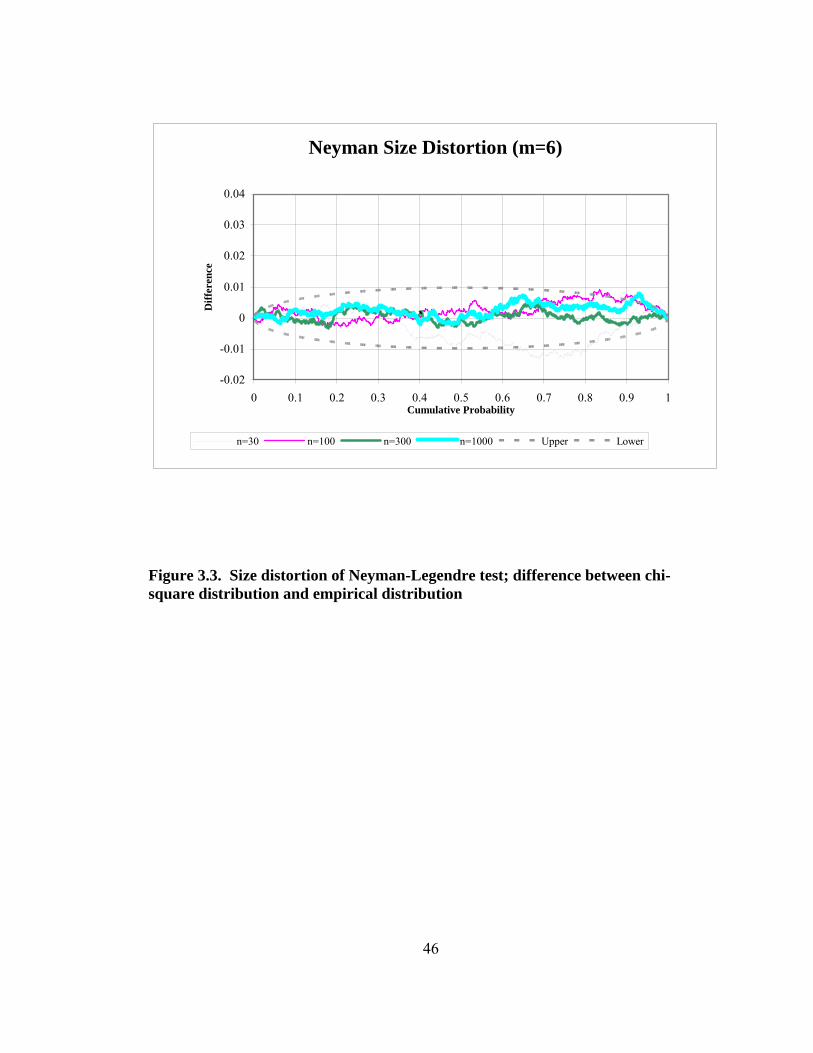
46
Neyman Size Distortion (m=6)
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1Cumulative Probability
Diff
eren
ce
n=30 n=100 n=300 n=1000 Upper Lower
`
Figure 3.3. Size distortion of Neyman-Legendre test; difference between chi-square distribution and empirical distribution

47
Neyman Size Distortion (m=6)
-0.01-0.008-0.006-0.004-0.002
00.0020.0040.0060.0080.01
0.9 0.91 0.92 0.93 0.94 0.95 0.96 0.97 0.98 0.99 1Cumulative Probability
Diff
eren
ce
n=30 n=100 n=300 n=1000 Upper Lower
Figure 3.4. Size distortion of Neyman-Legendre test in tail of distribution

48
Cubic Spline Size Distortion (m=6)
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1Cumulative Probability
Diff
eren
ce
n=30 n=100 n=300 n=1000 Upper Lower
`
Figure 3.5. Size distortion of Cubic Spline test; difference between chi-square distribution and empirical distribution
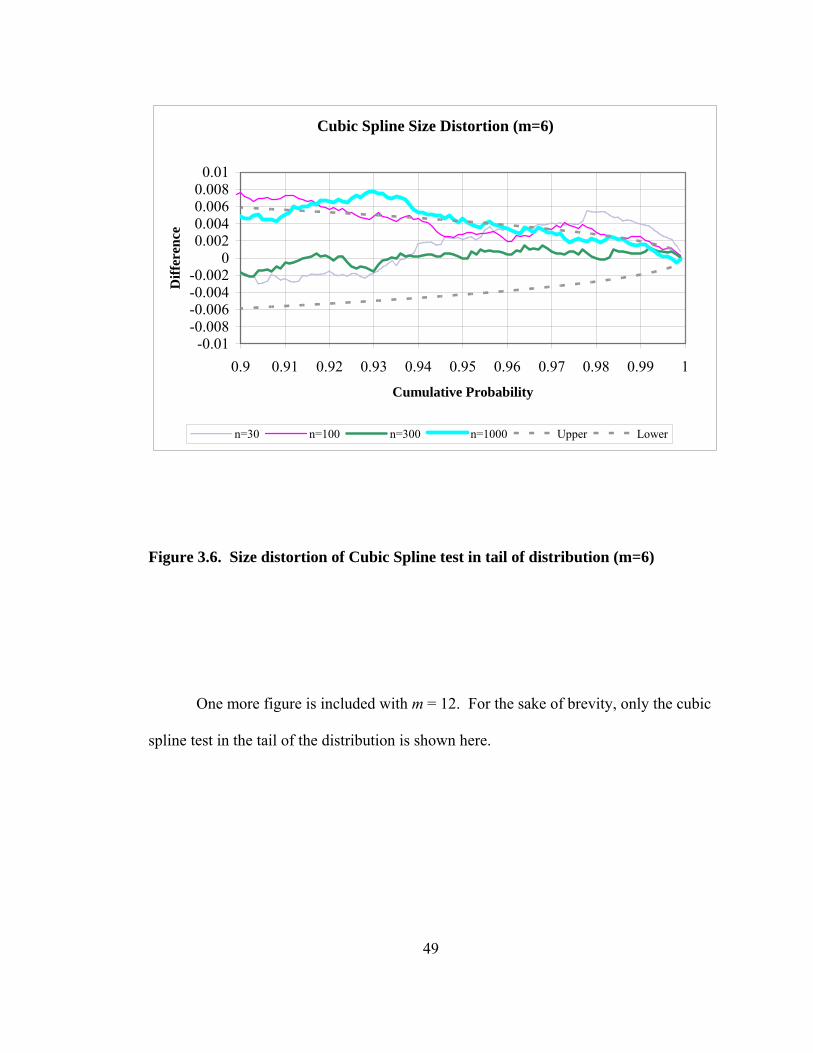
49
Cubic Spline Size Distortion (m=6)
-0.01-0.008-0.006-0.004-0.002
00.0020.0040.0060.0080.01
0.9 0.91 0.92 0.93 0.94 0.95 0.96 0.97 0.98 0.99 1
Cumulative Probability
Diff
eren
ce
n=30 n=100 n=300 n=1000 Upper Lower
Figure 3.6. Size distortion of Cubic Spline test in tail of distribution (m=6)
One more figure is included with m = 12. For the sake of brevity, only the cubic
spline test in the tail of the distribution is shown here.
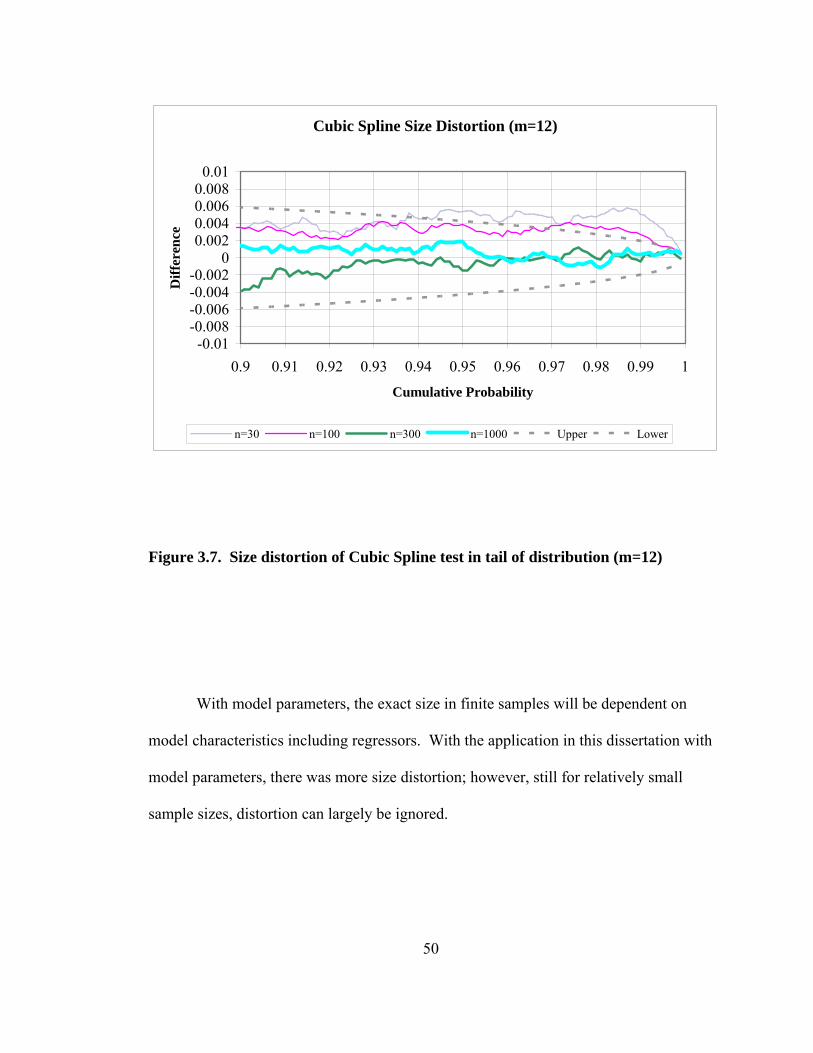
50
Cubic Spline Size Distortion (m=12)
-0.01-0.008-0.006-0.004-0.002
00.0020.0040.0060.0080.01
0.9 0.91 0.92 0.93 0.94 0.95 0.96 0.97 0.98 0.99 1
Cumulative Probability
Diff
eren
ce
n=30 n=100 n=300 n=1000 Upper Lower
Figure 3.7. Size distortion of Cubic Spline test in tail of distribution (m=12)
With model parameters, the exact size in finite samples will be dependent on
model characteristics including regressors. With the application in this dissertation with
model parameters, there was more size distortion; however, still for relatively small
sample sizes, distortion can largely be ignored.

51
3.3 LM TEST FOR A GENERAL DISTRIBUTION WITH ESTIMATED
MODEL PARAMETERS
In this section, we seek to expand the scope of possible uses for the LM test to
the most usual situation. We still wish to consider a random sample ε = (ε 1 , …, ε n)′
from an unknown distribution. Again, we would like to test:
H0: ε i ~ F(z) vs. H1: Not H0.
However, now we do not know the full specification of F; i.e., F = F(z;γ), so
Pr(ε i < z) = F(z;γ), where γ is a vector of parameters describing the error distribution.
For a Gaussian distribution, γ = (μ,σ2); for a stable distribution, γ = (a,b,c,d)25; for a
generalized error distribution, γ would be a vector including a scale parameter and an
exponent; and for the Student-t distribution, γ could be the scale and degrees of
freedom, to name four examples.26
To complicate matters just a bit more, we would like to explore the case in
which our random sample, ε = (ε 1 , …, ε n)′, is a set of unobserved variables defined by
a possibly non-linear regression form:
yi = h(Xi;β) + ε i , i = 1, …, n
where yi is the ith observed dependent variable, Xi is a row vector of known constants
(or is uncorrelated with the vector of ε’s), β is a vector of unknown coefficients, with
function h(Xi;β ) being possibly non-linear. 25 More often, the stable parameters are known as (α,β,γ,δ) or (α,β,c,δ) but unused symbols are becoming scarcer, so the Latin letters are used here in this introduction to avoid notational abuse. Later in the study, when less attention is given to the α’s from the perturbation functions, the more familiar alpha notation for stable distributions is employed. 26 The use of a likelihood function that contained conditional densities could allow the estimation of conditionally dependent error distributions such as ARIMA, ARCH, or GARCH distributions.

52
One could estimate θ = (β′,γ′)′ by maximum likelihood and form estimates of the
ε i for testing as in the earlier tests with completely specified distributions. However,
this would involve using residuals, without taking into consideration possible changes
in the model parameters.
Instead, one could resort once again to a LM approach; but, this time, one will
have to estimate all the parameters in θ simultaneously and evaluate the LM statistic at
the null hypothesis, α = 0, based on the selected parameterized distribution, F(z;γ). If θ
has dimension K and α still has dimension m, the LM statistic will indicate whether the
m-dimensional gradient is significantly different than zero relative to the
(K+m) × (K+m) dimensional Hessian. The potential improvement in the log likelihood
function from its value at the null hypothesis is composed of the improvement due to
the change in the error distribution measured by the change in α and the improvement
due to the change in θ. For example, using a θ̂ that is best suited to F1 to test whether
F1 or F2 is the better error distribution will bias a test towards F1, whereas using
matched sets of ( 1θ̂ ,F1) and ( 2θ̂ ,F2) to determine which set better describes the data
allows for a fairer test.
The score vector for the LM statistic is of dimension K + m, with the first K
elements being zero, since these will measure the partial derivatives at the maximum
likelihood estimates of θ. The Fisher information matrix will be of dimension
(K+m) × (K+m), and may for some models be quite difficult to compute. For this
endeavor, one may choose to estimate this by an alternate method, with consistent
estimators based on the empirical Hessian or the OPG estimator.

53
Since the difference in dimension of the null and alternative hypotheses is m,
once again, the LM test statistic will be asymptotically χ2(m). The finite sample critical
values will be dependent on the model and the specific regressors, but can be computed
if need be by Monte Carlo simulations.
3.4 FIRST TEST WITH MODEL PARAMETERS
To illustrate the test, monthly returns on the CRSP value-weighted index,
including dividends, were used for the period 1/53-12/92, as described in McCulloch,
1997.27 Using Ordinary Least Squares (OLS), the following model is estimated.
yi = μ + εi , ( )2~ 0,iid
iε σΦ
27 Later in the work, I expand on the range of these observations, extending the ending date some ten years to December 2002. The data that is thus employed is the log of real excess returns during a 50 year period. This was the first test that was econometric test that was performed with this theory and I wanted to preserve it. It is also instructive to note that the methodology of the test can be improved upon greatly. The test spurred greater attention to more precise numerical methods of generating LM statistics, which improved power. Less precise calculation reduces the power of the test which prevents the identification of densities that are too similar to the null hypothesized density. It may also mask or exaggerate the need to size adjust tests. Certainly another issue is the high degree of autocorrelation present in the data, though monthly data on equity returns generally has much less autocorrelation than daily data. Nevertheless, this concern spurred the work in Chapter 8 that suggests the validity of tests with highly autocorrelated data.

54
Gaussian ML Estimates
σ = 4.272 se 0.138 log L = -1378.07 μ = 0.5554 se 0.0195 n = 480 observations
Figure 3.8. Maximum likelihood estimates under assumption of Gaussian errors.
Later in the study, we will investigate suggested rules for selecting an appropriate
number of parameters and appropriate selection of basis vectors.28 For now, we
arbitrarily select m = 1 - 12 parameters and equidistant knots.
H0: εi ~ N(0,σ2) vs. H1: εi ~ G(N(0,σ2)), where the density associated with G is
( )( ) ( ) ( )( ) ( )2 2 2 2
10, 0, 1 0, 0, , 1, ,12
m
j jj
g N n N n mσ σ α φ σ σ=
⎛ ⎞= + =⎜ ⎟⎜ ⎟
⎝ ⎠∑ K ,
where N(0,σ2) represents the distribution function form a normal random variable with
mean zero and variance σ2. The Lagrange multiplier test statistics for this hypothesis
test follow:
28 Depending on the most likely alternatives to be tested against, it may also be appropriate to adopt unequal distance between knots with the spline tests to give more attention to the tails of the distributions. The analysis of results with non-equidistant knots awaits future work. However, I might recommend one promising set of points, which are well-defined for any number m: modified Chebyshev knots
represented by 1 1 2 1
cos , 1, ,2 2 2k
ky k n
nπ
−= − =⎛ ⎞
⎜ ⎟⎝ ⎠
K . For example, with n = 10, we would have
knots, symmetric on the unit interval, of approximately 0.0062, 0.0545, 0.1464, 0.2730, 0.4218, 0.5782, 0.7270, 0.8536, 0.9455, and 0.9938.

55
Lagrange Multiplier Test Statistics
M Pearson Neyman- Legendre
Linear Spline
Quadratic Spline
Cubic Spline
1 3.88 10.51 10.51 2 4.63 31.75 21.80 31.75 3 13.80 31.80 28.93 31.78 31.80 4 20.47 52.50 39.40 47.45 49.81 5 21.10 53.44 44.82 50.78 52.91 6 37.83 57.99 47.56 52.38 55.51 7 38.86 69.68 49.96 55.11 61.62 8 34.59 74.90 49.83 60.08 69.18 9 32.37 90.06 51.96 67.93 79.50 10 31.55 100.98 58.56 75.55 86.55 11 34.42 103.93 61.32 77.75 88.84 12 37.31 108.61 68.33 82.20 93.03
Complement of chi square inverse of test statistic
M Pearson Neyman- Legendre
Linear Spline
Quadratic Spline
Cubic Spline
1 0.0490 0.0012 0.0012 2 0.0987 0.0000 0.0000 0.0000 3 0.0032 0.0000 0.0000 0.0000 0.0000 4 0.0004 0.0000 0.0000 0.0000 0.0000 5 0.0008 0.0000 0.0000 0.0000 0.0000 6 0.0000 0.0000 0.0000 0.0000 0.0000 7 0.0000 0.0000 0.0000 0.0000 0.0000 8 0.0000 0.0000 0.0000 0.0000 0.0000 9 0.0002 0.0000 0.0000 0.0000 0.0000 10 0.0005 0.0000 0.0000 0.0000 0.0000 11 0.0003 0.0000 0.0000 0.0000 0.0000 12 0.0002 0.0000 0.0000 0.0000 0.0000
Figure 3.9. LM Test Statistics and p-values for Gaussian null hypothesis.

56
The Jarque-Bera statistic to test whether the residuals are Gaussian is 189.1787 based
on a calculation in EViews. The complement of chi square distribution of this statistic
with the appropriate 2 degrees of freedom is 10-41, based on calculations completed with
Scientific Workplace with a Maple engine. Many of the above chi square probabilities
are zero to 8 places (which was the precision calculated by the goodness-of-fit
program), but none of them are quite as significant as that shown by the Jarque-Bera
stastistic. It is expected that each statistic will be more sensitive depending on how the
error distribution differs from the Gaussian. Jarque-Bera is sensitive to departures
relative to skewness and kurtosis and is the best test to use for departures from
normality due solely to those moments. The Lagrange multiplier statistics will be
sensitive to other departures from normality, depending on the number and type of basis
vectors, and could detect distributions that were not Gaussian even if they had zero
skewness and kurtosis equal to three.
Drawing attention to the Pearson statistics momentarily, one can see that the
Pearson statistics with low parameter numbers is not particularly adept at identifying the
non-Gaussian nature of this set of errors. For m = 1, the significance level is 0.0490 and
for m = 2, the significance level is 0.0987. Especially with the last figure, one could not
reject a null hypothesis of Gaussian errors. Exploring that a bit more suggests that the
error distribution is similar to the Gaussian in the following way: the proportion of
residuals in each one-third of the distribution is not too dissimilar to what we would
expect if the errors were truly Gaussian. Put another way, if we were to place residuals
into the 3 bins
(1) et < - 0.4307σ, (2) - 0.4307σ < et < + 0.4307σ, and (3) et > + 0.4307σ,
57
we would expect about 1/3 to fall in each bin. In fact, the distribution of the 480
residuals with this sample was 148, 168, 164, respectively. Since Pearson can never be
sensitive to where a residual resides within the bin, with continuous distributions, it will
often not be too sensitive to departures from the posited distribution, as suggested early
in this discourse.
When checking the same calculations for an assumption of symmetric stable
errors, we will not be able to reject the null hypothesis. Additionally, we do not have a
Jarque-Bera like statistic to guide us, since all even moments ≥ 2 are infinite with non-
Gaussian symmetric stable distributions.
Now, we estimate:
yi = μ + εi , ( )~ , 0, , 0iid
i S a cε
where S is the stable cumulative distribution function, a is a shape parameter and c is a
scale parameter of a symmetric stable random variable. In the special case where a = 2,
this random variable is Gaussian with mean zero and variance 2c.29 Please note that μ
is a location parameter but not always a mean, since the first moment of a non-Gaussian
stable distribution does not exist if a ≤ 1.30 With the symmetric stable distribution, this
parameter is always the median (and single mode) of the distribution, regardless of the
value of a.31
29 See Appendix A, McCulloch (1996), or Samorodnitsky and Taqqu (1994) for more information about stable non-Gaussian random variables. 30 In the cases of stock market returns, a is generally greater than 1, so μ will in fact be a mean. 31 In most literature, the shape parameter for stable distributions is designated as α, but since I am already using that Greek letter for the coefficient of the basis vectors, I have substituted the Latin correlate here.

58
Fitting the above model by maximum likelihood yields the following results:
Symmetric Stable ML Estimates32
a = 1.845 se 0.059 c = 2.711 log c = 0.9974 se 0.0399 log L = -1364.74 μ = 0.6729 se 0.0182 n = 480 observations
Figure 3.10. Maximum likelihood estimates under assumption of symmetric stable errors. Arbitrarily selecting m = 12,
H0: f(εi) ~ s(α,0,c,0) vs. H1: f(εi) ~ G(S(a,0,c,0);α),
where the density associated with G is
( )( ) ( ) ( )( ) ( )12
1, 0, , 0 ; , 0, , 0 1 , 0, , 0 , 0, , 0j j
jg S a c s a c S a c s a cα α φ
=
⎛ ⎞= +⎜ ⎟⎜ ⎟
⎝ ⎠∑
where s(a,0,c,0) is the probability density function that corresponds to S(a,0,c,0).
32 The application actually fit the natural logarithm of c, rather than c, so standard errors are applicable to log c rather than c itself.

59
The results of such tests yield:
Statistic 1-χ212(stat)
Pearson 12.61 0.6321
Neyman-Legendre polynomial 17.23 0.3051
Linear Spline 17.39 0.2963
Quadratic Spline 18.26 0.2493
Cubic Spline 17.12 0.3119 Figure 3.11. LM Test Statistics and p-values for stable null hypothesis.
With conventional levels of significance, one cannot reject the null hypothesis,
that the errors are independent and identically distributed as a symmetric stable
distribution. Note that this is not the same thing as accepting the null hypothesis. It
may be that other well-known parametric distributions can fit the data as well, or that

60
480 observations are not sufficient to generate the power to reject the hypothesis of
symmetric stable errors.
If we would consider the same test with another leptokurtic distribution, such as
the generalized Student-t distribution,33 we can get maximum likelihood estimates as
follows:
Generalized Student-t ML Estimates34
1/df = 0.1552 se 0.0413 df = 6.443
c = 3.531 log c = 1.262 se 0.052 log L = -1363.72 μ = 0.7164 se 0.1836
n = 480 observations
Figure 3.12. Maximum likelihood estimates under assumption of generalized Student-t errors.
33 The following Student-t distribution is generalized so that it has a scale parameter, c:
( )( )
11 2 22
22
( ) 1
rr
x
r
tf x dtrcc rπ
+−+
−∞
Γ ⎛ ⎞= +⎜ ⎟
Γ ⎝ ⎠∫ The number of degrees of freedom is r; in general, it does not
necessarily have to be an integer. ( ) 10
a xa x e dx∞ − −Γ = ∫ ; a recursion relation exists, Γ(a) = (a-1)Γ(a-1),
Γ(n) = (n-1)!, for any positive integer n, and Γ(½) = π . Consistent with the degrees of freedom, the argument for Γ need not be an integer nor a multiple of ½. 34 The application actually fit the reciprocal of the degrees of freedom, so standard errors are applicable to the reciprocal rather than the estimated value of the degrees of freedom.
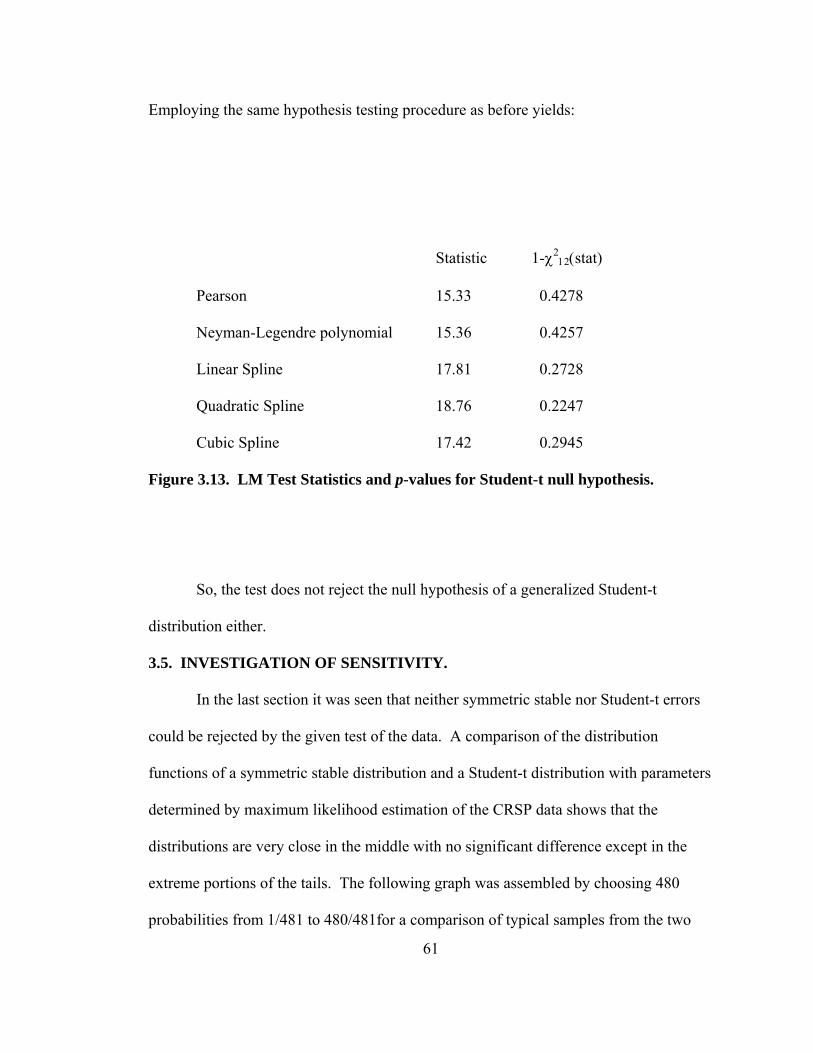
61
Employing the same hypothesis testing procedure as before yields:
Statistic 1-χ212(stat)
Pearson 15.33 0.4278
Neyman-Legendre polynomial 15.36 0.4257
Linear Spline 17.81 0.2728
Quadratic Spline 18.76 0.2247
Cubic Spline 17.42 0.2945
Figure 3.13. LM Test Statistics and p-values for Student-t null hypothesis.
So, the test does not reject the null hypothesis of a generalized Student-t
distribution either.
3.5. INVESTIGATION OF SENSITIVITY.
In the last section it was seen that neither symmetric stable nor Student-t errors
could be rejected by the given test of the data. A comparison of the distribution
functions of a symmetric stable distribution and a Student-t distribution with parameters
determined by maximum likelihood estimation of the CRSP data shows that the
distributions are very close in the middle with no significant difference except in the
extreme portions of the tails. The following graph was assembled by choosing 480
probabilities from 1/481 to 480/481for a comparison of typical samples from the two

62
distributions of the same sample size as the data. The ordinates were determined by
applying the respective inverse distribution functions to the vector of probabilities.
t(6.4434,3.5310) vs. ss(1.8824,2.7414)
-20
-15
-10
-5
0
5
10
15
20
0 0.2 0.4 0.6 0.8 1t
ss
Figure 3.14. Comparison of inverse distribution functions of Student-t and symmetrical stable error distributions at MLE.
An expanded view of the tail region (48 points) allows the slight differences between
the distributions to be discerned:

63
t(6.4434,3.5310) vs. ss(1.8824,2.7414)
0
2
4
6
8
10
12
14
16
18
20
0.9 0.92 0.94 0.96 0.98 1
tss
Figure 3.15. Comparison of upper tail of inverse distribution functions of Student-t and symmetrical stable error distributions at MLE.
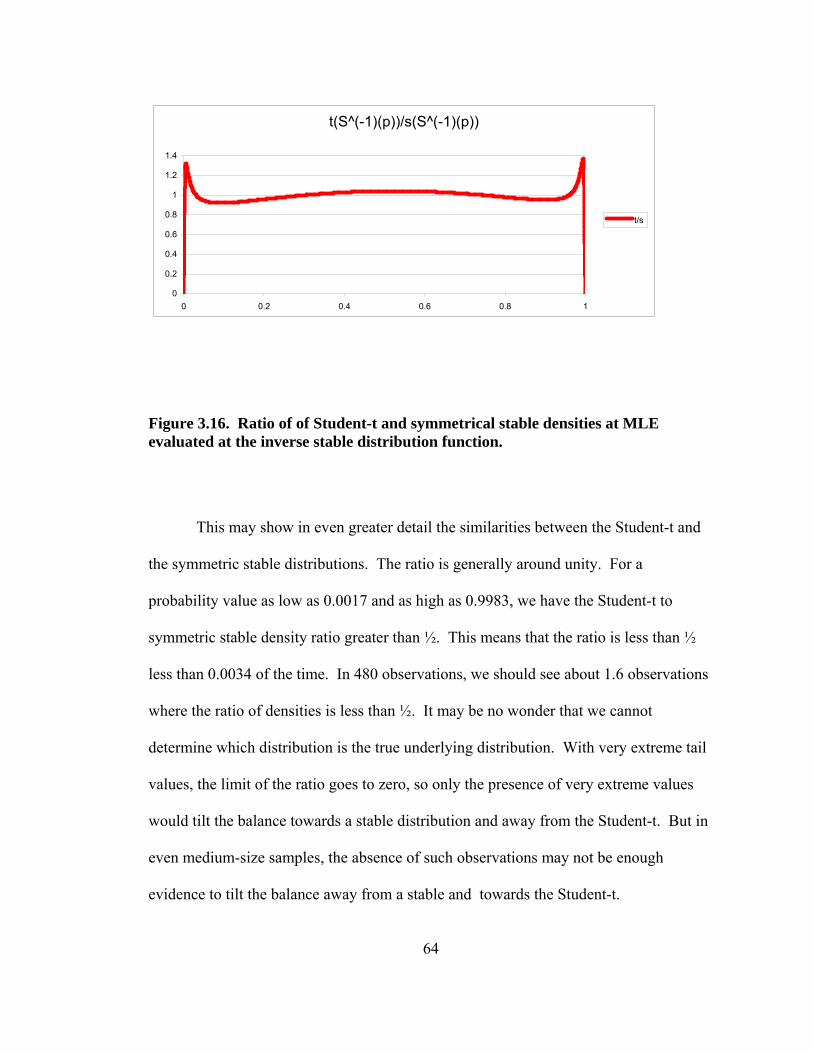
64
t(S^(-1)(p))/s(S^(-1)(p))
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 0.2 0.4 0.6 0.8 1
t/s
Figure 3.16. Ratio of of Student-t and symmetrical stable densities at MLE evaluated at the inverse stable distribution function.
This may show in even greater detail the similarities between the Student-t and
the symmetric stable distributions. The ratio is generally around unity. For a
probability value as low as 0.0017 and as high as 0.9983, we have the Student-t to
symmetric stable density ratio greater than ½. This means that the ratio is less than ½
less than 0.0034 of the time. In 480 observations, we should see about 1.6 observations
where the ratio of densities is less than ½. It may be no wonder that we cannot
determine which distribution is the true underlying distribution. With very extreme tail
values, the limit of the ratio goes to zero, so only the presence of very extreme values
would tilt the balance towards a stable distribution and away from the Student-t. But in
even medium-size samples, the absence of such observations may not be enough
evidence to tilt the balance away from a stable and towards the Student-t.

65
Next we see what happens if we actually know the underlying distribution.
What can we expect? This test uses a generated series of 480 observations from a
Student-t distribution with 6.4434 degrees of freedom, a scale factor 3.5310, with a
location parameter of 0.7164. Not surprisingly, at this number of observations, similar
tests to those previously employed do not allow summary rejection of a null hypothesis
of an underlying symmetric stable series. The maximum likelihood estimates of the
earlier symmetric stable fitting of the CRSP data is included below for comparison.

66
Series: Random Student-t Series: CRSP data
Random Seed 04579384 (hex)
Symmetric Stable ML Estimates Symmetric Stable ML Estimates
a = 1.7814 se 0.0781 a = 1.8450 se 0.0658 c = 2.7441 c = 2.7113
log c = 1.0094 se 0.0479 log c = 0.9974 se 0.0433 log L = -1384.4738 log L = -1364.7445
μ = 0.6325 se 0.1875 μ = 0.6729 se 0.1840 n = 480 observations n = 480 observations
Statistic 1-χ2
12(stat)
Pearson 11.84 0.6911 Neyman-Legendre polynomial 6.32 0.9738 Linear Spline 20.16 0.1657 Quadratic Spline 32.94 0.0048 Cubic Spline 42.41 0.0002
Figure 3.17. Tests of a null of symmetric stable distribution with an underlying Student-t distribution, sample size 480.
Prior to commenting on the above statistics, it may be instructive to view
another simulation:
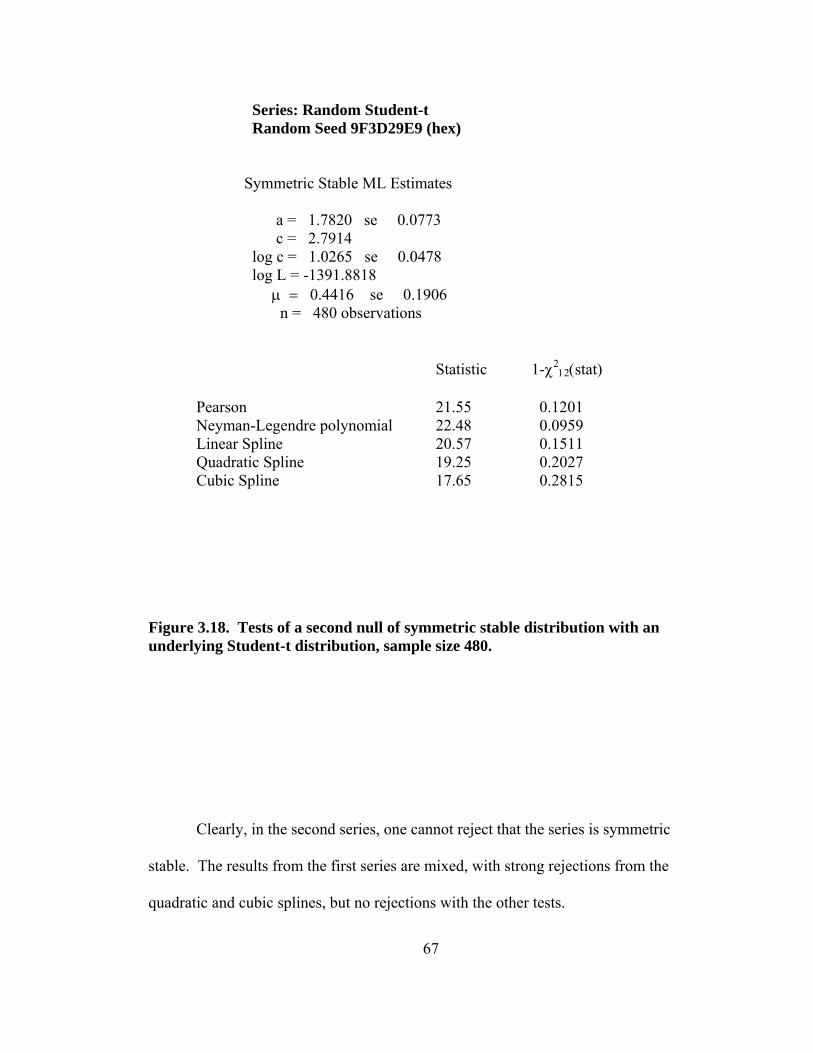
67
Series: Random Student-t Random Seed 9F3D29E9 (hex)
Symmetric Stable ML Estimates
a = 1.7820 se 0.0773 c = 2.7914
log c = 1.0265 se 0.0478 log L = -1391.8818
μ = 0.4416 se 0.1906 n = 480 observations
Statistic 1-χ212(stat)
Pearson 21.55 0.1201
Neyman-Legendre polynomial 22.48 0.0959 Linear Spline 20.57 0.1511 Quadratic Spline 19.25 0.2027 Cubic Spline 17.65 0.2815
Figure 3.18. Tests of a second null of symmetric stable distribution with an underlying Student-t distribution, sample size 480.
Clearly, in the second series, one cannot reject that the series is symmetric
stable. The results from the first series are mixed, with strong rejections from the
quadratic and cubic splines, but no rejections with the other tests.
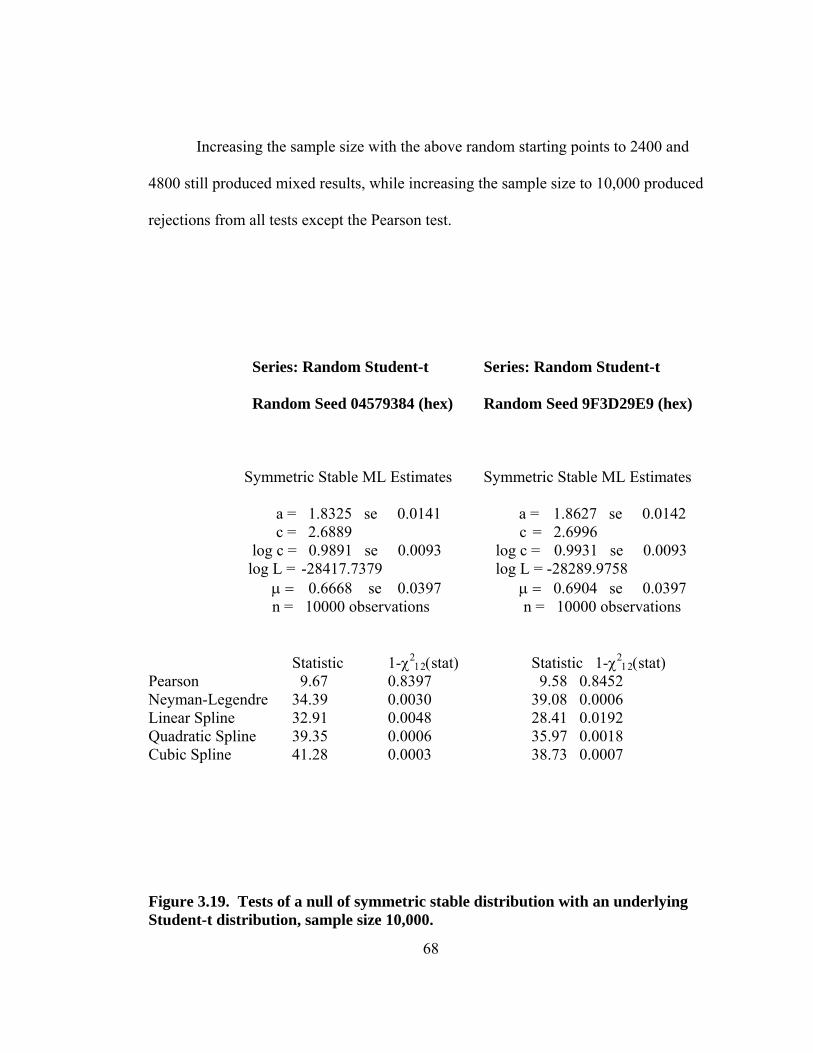
68
Increasing the sample size with the above random starting points to 2400 and
4800 still produced mixed results, while increasing the sample size to 10,000 produced
rejections from all tests except the Pearson test.
Series: Random Student-t Series: Random Student-t
Random Seed 04579384 (hex) Random Seed 9F3D29E9 (hex)
Symmetric Stable ML Estimates Symmetric Stable ML Estimates
a = 1.8325 se 0.0141 a = 1.8627 se 0.0142 c = 2.6889 c = 2.6996
log c = 0.9891 se 0.0093 log c = 0.9931 se 0.0093 log L = -28417.7379 log L = -28289.9758
μ = 0.6668 se 0.0397 μ = 0.6904 se 0.0397 n = 10000 observations n = 10000 observations
Statistic 1-χ212(stat) Statistic 1-χ2
12(stat)
Pearson 9.67 0.8397 9.58 0.8452 Neyman-Legendre 34.39 0.0030 39.08 0.0006 Linear Spline 32.91 0.0048 28.41 0.0192 Quadratic Spline 39.35 0.0006 35.97 0.0018 Cubic Spline 41.28 0.0003 38.73 0.0007
Figure 3.19. Tests of a null of symmetric stable distribution with an underlying Student-t distribution, sample size 10,000.

69
The bad news is that with limited data, densities that are similar over much of
their support cannot be distinguished from each other very easily. This does not allow
one to make very strong statements about the tail probabilities where the densities differ
considerably. Although this data set has only 480 monthly returns, 50 years of daily
returns would yield about 12,500 observations, so it is not unrealistic that one could
observe sample sizes of 10,000 or even larger. When daily data is used the returns
become less independent and less identically distributed since there is more apparent
volatility clustering, day-of-the-week effects in both mean and scale, holiday effects,
end-of-year effects, among other complications. However, the method shown here of
maximum likelihood estimation allows these extra considerations to be estimated
without biasing the results.
Some studies use tick-by-tick Foreign Exchange rate data. At that frequency,
transaction costs start to become a major consideration, so the returns are difficult to
analyze, but now more than ever samples might have 100,000 or even 1,000,000
observations. So 10,000 may in some senses still be a “small” sample.

70
CHAPTER 4
RESULTS OF OTHER GFTS
4.1 RESIDUAL TESTS.
Many goodness-of-fit tests implicitly rely on residuals being distributed
identically to the typically unknown error terms. Unless the model parameter terms are
known with certainty, most parameters must be estimated. During that estimation
parameters are chosen to fit the residuals as nearly as possible to the assumed error
distribution. The result is that residual tests will tend to be biased towards acceptance
of the null hypothesis.
The symmetric stable case presented before can serve as an illustration. The
first table below shows, in the left column, relative levels of significance when the
hypothesis tests take into consideration possible model improvement by considering
changes the model parameters as well as changes in the error distribution. The right
column shows levels of significance when the estimated model parameters are taken as
fixed and only changes in the error distribution are considered. The 90 tests are five
tests each (Pearson, Neyman, and the three Spline tests) using from 3 to 20 free
parameters to test the symmetric stable distribution.

71
Frequency of Tests by Level of Significance
Level of Significance Corrected Test Naïve Test
≤ 0.05 3 1 0.05-0.10 1 0 0.10-0.15 0 1 0.15-0.20 9 1 0.20-0.30 24 8 0.30-0.40 32 30 0.40-0.50 8 28 0.50-0.60 4 14 0.60-0.70 3 1 0.70-0.80 4 3 0.80-0.90 0 1 0.90-1.00 1 2
N/A 135 0
Figure 4.1. Comparison of results of 90 tests where the null hypothesis and the underlying distributions were both symmetric stable distributions.
35 A Pearson statistic that was negative was eliminated since no Complement of the Inverse Chi-Squared Distribution statistic is available. The procedure employed uses an estimate of the Fisher information matrix which is not guaranteed to be positive definite. Some test-statistics can be negative. The next section will elucidate this matter.
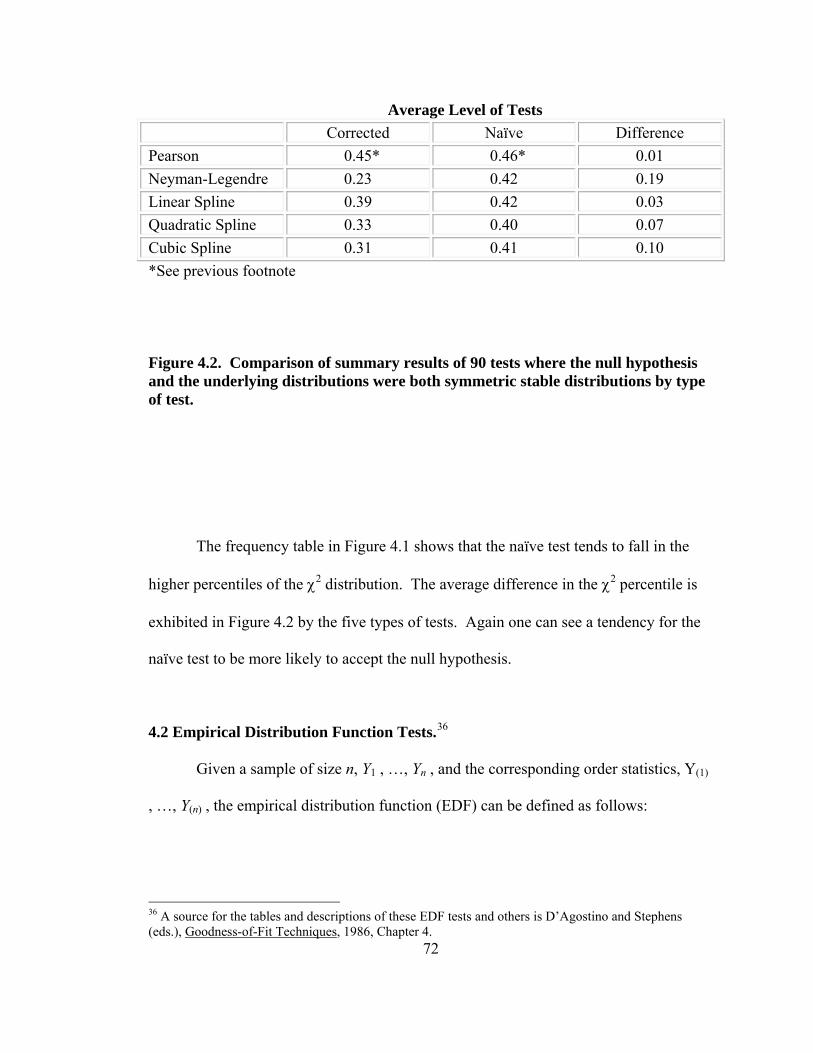
72
Average Level of Tests Corrected Naïve Difference Pearson 0.45* 0.46* 0.01 Neyman-Legendre 0.23 0.42 0.19 Linear Spline 0.39 0.42 0.03 Quadratic Spline 0.33 0.40 0.07 Cubic Spline 0.31 0.41 0.10 *See previous footnote
Figure 4.2. Comparison of summary results of 90 tests where the null hypothesis and the underlying distributions were both symmetric stable distributions by type of test.
The frequency table in Figure 4.1 shows that the naïve test tends to fall in the
higher percentiles of the χ2 distribution. The average difference in the χ2 percentile is
exhibited in Figure 4.2 by the five types of tests. Again one can see a tendency for the
naïve test to be more likely to accept the null hypothesis.
4.2 Empirical Distribution Function Tests.36
Given a sample of size n, Y1 , …, Yn , and the corresponding order statistics, Y(1)
, …, Y(n) , the empirical distribution function (EDF) can be defined as follows:
36 A source for the tables and descriptions of these EDF tests and others is D’Agostino and Stephens (eds.), Goodness-of-Fit Techniques, 1986, Chapter 4.

73
(1)
( ) ( 1)
( )
0
( )
1
ii in
n
y Y
EDF y Y y Y
Y y+
⎧ −∞ < <⎪
= < <⎨⎪ < < ∞⎩
, i = 1 , 2 , …, n - 1
Many EDF tests have been around for half a century or more. It seems natural
to compare the previous results to these tests. These tests have an assumption of a
completely specified distribution. When the parameters have been determined by some
optimization method such as maximum likelihood, as discussed in the previous section,
inferences are less accurate.
The most common empirical distribution goodness-of-fit test is based on the
Kolmogorov-Smirnoff (KS) statistic. It seeks to look at the largest single difference
between the assumed distribution, F(y) and the EDF, so it can be described as:
( ) ( )supy
KS EDF y F y= −
Two other common EDF tests are the Cramér-von Mises (CvM) statistic and an
Anderson-Darling (AD) modification of CvM. The CvM statistic is the integrated
squared difference between the EDF and the assumed distribution. The AD
modification is based on the premise that one should examine the difference in the tails
of the distributions more closely than the center of the distribution, which is
accomplished by dividing by a function that takes its maximum value at the median of
the distribution.

74
( ) ( )
( ) ( )( ) ( )
2*
2*
* *1
CvM n EDF y F y dy
EDF y F yAD n dy
F y F y
∞
−∞
∞
−∞
⎡ ⎤= −⎣ ⎦
⎡ ⎤−⎣ ⎦=⎡ ⎤−⎣ ⎦
∫
∫
In the expressions above ( ) ( )*F y U F y= ⎡ ⎤⎣ ⎦ where U(y) is the distribution
function for a uniform random variable on the unit interval. By using this
transformation and sample size adjustment factors for KS and CvM, standard tables of
critical values can be employed.
The results for the CRSP data follow:
Kolmogorov-Smirnov Stable Student Gaussian Base Statistic 0.039 0.039 0.053
Modified 0.855 0.870 1.167 Significance >0.250 >0.250 0.129
Cramér-von Mises Base Statistic 0.099 0.097 0.305
Modified 0.098 0.096 0.305 Significance >0.250 >0.250 0.129
Anderson-Darling Statistic 0.793 0.813 2.046
Significance >0.250 >0.250 0.083
Figure 4.3 Empirical Distribution Functions of CRSP data.
75
At conventional significance levels none of these tests would reject any of the
posited distributions; however, the Gaussian tests appear to be in the weaker range of
statistics indicating non-rejection.

76
CHAPTER 5
IMPROVEMENTS IN RESULTS DUE TO NUMERICAL QUADRATURE OF FISHER INFORMATION MATRIX
5.1 DERIVATION OF FISHER INFORMATION MATRIX
The application of Lagrange multiplier tests in this research has relied on using
consistent estimators for the Fisher information matrix. Especially with distributions
such as the symmetric stable with no closed form for even its corresponding density
function, numerical estimation of many of the components of the test statistic is
necessary. When the Fisher information matrix is unavailable, consistent estimators
such as the negative of empirical Hessian or the outer-product-of-the-gradient (OPG)
estimator become likely candidates for substitution. When computing the Fisher
information matrix the only stochastic aspect is the vector of maximum likelihood
estimates. The use of the empirical Hessian or the OPG estimators inherently imparts
more noise to the tests. And, per Davidson and McKinnon, the OPG estimator “often
seems to be particularly poor.”37
In the example above, use was made of a hybrid matrix, with some of its entries
actually being entries from the Fisher information matrix, some being entries from the
negative of the empirical Hessian, and some being entries from the OPG estimator.
37 Davidson and MacKinnon, Estimation and Inference in Econometrics, p. 266.

77
Since a consistent matrix estimator consistently estimates each entry in the matrix, such
a hybrid must also be a consistent matrix estimator.
Let’s examine the makeup of typical hybrid estimator.
( ) ( ) ( )
( ) ( ) ( )
2
1 1
21
0 ˆ1 10
ln ln ln
;ln ln ln
n ni i i
k k k ji i
n ni i i
ij k j ji i
L y L y L y
L y L y L yn dy
θ θα
θ θ θ α
α θ α α
′= =
′= = ==
⎡ ⎤∂ ∂ ∂−⎢ ⎥
∂ ∂ ∂⎢ ⎥⎢ ⎥⎡ ⎤∂ ∂ ∂⎢ ⎥−⎢ ⎥⎢ ⎥∂ ∂ ∂⎢ ⎥⎣ ⎦⎣ ⎦
∑ ∑
∑ ∑∫
, 1, 2, , ; , 1, ,j j m k k K′ ′= =K K
The upper left portion of the matrix measures the curvature of the log likelihood
with respect to the model parameters. For the stable and Student-t tests, a numerical
estimate of empirical Hessian was used; for the Gaussian test, the actual Fisher
information matrix was used.
The lower right portion of the matrix shows the curvature with respect to the
perturbation parameters in the density of the alternate hypothesis. Given the basis
functions chosen, exact analytical calculation of the Fisher information matrix was
straightforward.
The off diagonal elements are estimated via OPG estimation, which perhaps is
the noisiest of the three methods.
In addition to the noise, another inconvenient feature of this hybrid matrix is that
it is not guaranteed to be positive definite. Even though the test statistics are
asymptotically chi-squared, they can be negative in finite samples.

78
After the employment of these tests, we have determined that we may be able
always to determine the empirical Hessian and perhaps always to numerically estimate
the Fisher information matrix which has led to more accurate finite sample results.
Following are the details of the recent calculations:
Given the nested hypotheses test,
H0: yi ~ F(y;θ) vs. H1: yi ~ G[F(y;θ)],
with the density for the alternative hypothesis being
g[F(y;θ)] f(y;θ), where ( ) ( )1
1m
j jj
g z zα φ=
= + ∑ ,
the likelihood and log likelihood functions are:
( ) ( )1
( , ; ) ; ; ;n
i ii
L y g F f yα θ ε θ α θ=
⎡ ⎤= ⎣ ⎦∏ and
( ) ( )1 1
log ( , ; ) log ; ; log ;n n
i ii i
L y g F y f yα θ θ α θ= =
⎡ ⎤= +⎣ ⎦∑ ∑
The first derivatives of the log likelihood are:
( )( ) ( )
( )( )( )( )
1 1 1
1
1
log ( , ; ) log 1 ; log ;
;
1 ;
n m n
j j i ij j i j i
nj i
mi
j j ij
L y F y f y
F y
F y
α θ α φ θ θα α
φ θ
α φ θ
= = =
=
=
⎛ ⎞⎛ ⎞∂ ∂⎜ ⎟= + +⎜ ⎟⎜ ⎟⎜ ⎟∂ ∂ ⎝ ⎠⎝ ⎠
=+
∑ ∑ ∑
∑∑
and
( )( ) ( )1 1 1
log ( , ; ) log 1 ; log ;n m n
j j i ik k i j i
L y F y f yα θ α φ θ θθ θ = = =
⎛ ⎞⎛ ⎞∂ ∂⎜ ⎟= + + =⎜ ⎟⎜ ⎟⎜ ⎟∂ ∂ ⎝ ⎠⎝ ⎠∑ ∑ ∑

79
( )( ) ( )
( )( )
( )
( )1
1 1
1
; ; ;
;1 ;
m
j j i i in nkj k
mii i
j j ij
F fF y y y
f yF y
α φ θ θ θθ θθ
α φ θ
=
= =
=
∂ ∂′∂ ∂
++
∑∑ ∑
∑
Evaluation at the maximum log likelihood of the restricted model, θθα ˆ,0 == , yields:
( )( )0 1ˆ
log ( , ; ) ˆ;n
j ij i
L y F yαθ θ
α θ φ θα = =
=
∂=
∂ ∑ and ( )
( )0 1ˆ
ˆ;log ( , ; )
ˆ;
ink
k i i
f yL y
f yαθ θ
θθα θ
θ θ= ==
∂∂∂
=∂ ∑
The second derivatives of the log likelihood are:
( )( )( )( )
( )( ) ( )( )
( )( )
2
21 1
1 1
; ; ;log ( , ; )
1 ; 1 ;
n nj i j i j i
m mj j j i ih h i h h i
h h
F y F y F yL y
F y F y
φ θ φ θ φ θα θα α α
α φ θ α φ θ
′
′ ′ = =
= =
⎛ ⎞⎜ ⎟ −∂ ∂ ⎜ ⎟= =⎜ ⎟∂ ∂ ∂ ⎡ ⎤+⎜ ⎟ +⎢ ⎥⎝ ⎠ ⎣ ⎦
∑ ∑∑ ∑
,
( )( ) ( )
( )( )
( )
( )2
1
1 1
1
; ; ;log ( , ; )
;1 ;
m
j j i i in nkj k
mk k k ii i
j j ij
F fF y y yL y
f yF y
α φ θ θ θθ θα θθ θ θ θ
α φ θ
=
′ ′ = =
=
⎛ ⎞∂ ∂′⎜ ⎟∂ ∂∂ ∂ ⎜ ⎟= + =⎜ ⎟∂ ∂ ∂+⎜ ⎟⎜ ⎟
⎝ ⎠
∑∑ ∑
∑
( )( ) ( )( ) ( ) ( ) ( )( ) ( )
( )( )
2
1 12
1
1
1 ; ; ; ; ; ;
1 ;
m m
j j i j j i i i j i in j j k k k k
mi
j j ij
F F FF y F y y y F y y
F y
α φ θ α φ θ θ θ φ θ θθ θ θ θ
α φ θ
′ ′= =
=
=
⎡ ⎤ ⎡ ⎤⎛ ⎞∂ ∂ ∂′′ ′+ +⎢ ⎥ ⎢ ⎥⎜ ⎟∂ ∂ ∂ ∂⎢ ⎥ ⎢ ⎥⎝ ⎠⎣ ⎦ ⎣ ⎦
⎡ ⎤+⎢ ⎥
⎢ ⎥⎣ ⎦
∑ ∑∑
∑
( )( ) ( ) ( )( ) ( )
( )( )
1 12
1
1
; ; ; ;
1 ;
m m
j j i i j j i in k kj j
mi
j j ij
F FF y y F y y
F y
α φ θ θ α φ θ θθ θ
α φ θ
′= =
=
=
⎡ ⎤ ⎡ ⎤∂ ∂′ ′⎢ ⎥ ⎢ ⎥∂ ∂⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦−⎡ ⎤
+⎢ ⎥⎢ ⎥⎣ ⎦
∑ ∑∑
∑
( ) ( ) ( ) ( )
( )
2
21
; ; ; ;
;
i i i ink k k k
i i
f f ff y y y y
f y
θ θ θ θθ θ θ θ
θ′ ′
= ⎡ ⎤⎣ ⎦
∂ ∂ ∂−∂ ∂ ∂ ∂
+∑

80
and, first differentiating with respect to αj, and then differentiating with respect to θk
(for ease of calculation),
( )( )( )( )
2
1
1
;log ( , ; )
1 ;
nj i
mk j k i
j j ij
F yL y
F y
φ θα θθ α θ
α φ θ=
=
⎛ ⎞⎜ ⎟
∂ ∂ ⎜ ⎟= =⎜ ⎟∂ ∂ ∂+⎜ ⎟⎜ ⎟
⎝ ⎠
∑∑
( )( ) ( )( ) ( ) ( )( ) ( )( ) ( )
( )( )
1 12
1
1
1 ; ; ; ; ; ;
1 ;
m m
j j i j i i j i j j i in k kj j
mi
j j ij
F FF y F y y F y F y y
F y
α φ θ φ θ θ φ θ α φ θ θθ γ
α φ θ
= =
=
=
⎡ ⎤ ∂ ∂′ ′+ −⎢ ⎥∂ ∂⎢ ⎥⎣ ⎦
⎡ ⎤+⎢ ⎥
⎢ ⎥⎣ ⎦
∑ ∑∑
∑
These expressions simplify greatly at the maximized log likelihood of the restricted
model, θθα ˆ,0 == :
( )( ) ( )( )2
0 1ˆ
log ( , ; ) ˆ ˆ; ;n
j i j ij j i
L y F y F yαθ θ
α θ φ θ φ θα α ′
=′ ==
∂= −
∂ ∂ ∑
( ) ( ) ( ) ( )( )
2
2
20 1ˆ
ˆ ˆ ˆ ˆ; ; ; ;log ( , ; )
ˆ;
i i i ink k k k
k k ii
f f ff y y y yL y
f yαθ θ
θ θ θ θθ θ θ θα θ
θ θ θ
′ ′
=′ ==
∂ ∂ ∂−
∂ ∂ ∂ ∂∂=
∂ ∂ ⎡ ⎤⎣ ⎦
∑
( )( ) ( )2
0 1ˆ
log ( , ; ) ˆ ˆ; ;n
j i ik j ki
L y FF y yαθ θ
α θ φ θ θθ α θ= =
=
∂ ∂′=∂ ∂ ∂∑
It is possible to perform the expectation integration for some distribution
functions to get the Fisher information matrix directly. But, in any case it is always
reasonable to get an empirical Hessian, by substituting residuals from the restricted
estimate for the unknown error terms. All that is necessary to determine the mixed
second derivatives is to (1) differentiate the chosen basis functions, (2) numerically
evaluate the chosen distribution, using maximum likelihood estimates for parameters, at

81
each residual, and (3) numerically differentiate the distribution function at each
residual.
To get the full Fisher information matrix directly, we need to solve:
( )( ) ( )( ) ( ); ; ;j jn F y F y f y dyφ θ φ θ θ∞
′−∞∫ for the lower right entries,
( ) ( )
( )
; ;
;k k
f fy yn dy
f y
θ θθ θ
θ∞ ′−∞
∂ ∂∂ ∂
⎡ ⎤⎣ ⎦∫ for the upper left entries, and
( )( ) ( ) ( ); ; ;jk
Fn F y y f y dyφ θ θ θθ
∞
−∞
∂′−∂∫ for the off diagonal entries.
Numerical quadrature can be employed with a transformation to a finite interval.
Another form for the last integral is ( )( ) ( );;j
k
f yn F y dy
θφ θ
θ∞
−∞
∂∂∫ , which is
derived from the expected value of the OPG. These two expressions can be shown to
be equal by the method of integration by parts:
( )( ) ( );;j
k
f yF y dy
θφ θ
θ∞
−∞
∂=
∂∫
( )( ) ( ) ( )( ) ( ) ( ); ;; ; ;
y
j jk ky
F y F yF y F y f y dy
θ θφ θ φ θ θ
θ θ
=∞∞
−∞=−∞
∂ ∂⎤ ′− =⎥∂ ∂⎦∫
( )( ) ( ) ( )( ) ( )
( )( ) ( ) ( )
; ;lim ; lim ;
;; ;
j jy yk k
jk
F y F yF y F y
F yF y f y dy
θ θφ θ φ θ
θ θ
θφ θ θ
θ
→∞ →−∞
∞
−∞
∂ ∂⎡ ⎤ ⎡ ⎤−⎢ ⎥ ⎢ ⎥∂ ∂⎣ ⎦ ⎣ ⎦
∂′− =∂∫

82
( ) ( ) ( ) ( ) ( )( ) ( ) ( )
( )( ) ( ) ( )
0
;1 0 0 0 ; ;
;; ;
j j jk
jk
F yF y f y dy
F yF y f y dy
θφ φ φ θ θ
θ
θφ θ θ
θ
∞
−∞=
∞
−∞
∂′− − =∂
∂′−∂
∫
∫
144424443, since
( ) ( )lim ; 1 lim ; 0y y
F y and F yθ θ→∞ →−∞
= =⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦ , which are both constants, so the limit of
the derivative must be zero.
5.2 NUMERICAL TWO-SIDED DIFFERENTIATION38
Attempting direct integration of the elements of the Fisher information matrix
becomes quite a numerical challenge to produce estimates that are accurate enough for
matrix inversion and to produce accurate Lagrange multiplier statistics. A method called
Richardson extrapolation, of which a Romberg integration technique is a special case, is
employed to obtain more accurate evaluations of derivatives and integrals than is
possible with the same effort by using less complicated but more direct numerical
methods.
It is desirable to use two-sided numerical differences to approximate derivatives
when possible because, as will be shown, it is more accurate than its one-sided
counterpart. This is because second order terms are automatically eliminated with the
two-sided approach.
Unfortunately, in some situations, such as determining the derivatives of stable
distributions when the shape parameter is near 2, one can only perform one-sided
38 Significant inspiration for some of the methodologies described in the next several sections was derived from Fundamentals of Numerical Analysis, Stephen G. Kellison, Richard D. Irwin, Inc., 1975 and A First Course in Numerical Analysis, Anthony Ralston and Philip Rabinowitz, Dover Publications, Inc., 1978.

83
numerical differencing since the derivatives (and the functions) exist only one side of
the desired quantity.
Using a Taylor series, one finds
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
2 3
2 32 3!
2 3!
h hf x h f x hf x f x f x
h hf x h f x hf x f x f x
′ ′′ ′′′+ = + + + +
′ ′′ ′′′− = − + − +
L
L
Subtraction of these two equations and solving for f '(x) yields
( ) ( ) ( ) ( ) ( )( )
( ) ( )2 12
01lim
2 2 1 ! 2
ii
hi
f x h f x h f x f x h f x hf x h
h i h
+∞
→=
+ − − + − −′ = + =
+∑ ,
so the usual approach is to choose a small positive value of h with the hope that the
second and higher order terms will not have too much of an effect and the resulting ratio
is not too different from the derivative.
A problem with this approach using a digital computer with finite precision is
that as h is chosen smaller and smaller, the difference, ( ) ( )f x h f x h+ − − , becomes
smaller and the subtraction eliminates more and more significant digits and thus
increases the error to a point that there is a limit to how close the ratio can be to the
derivative. Worse, at some point, smaller h actually increases the error between the
ratio and the derivative. So errors will be many orders of magnitude larger than the
actual precision that is available with any given computer.
However, by noticing that the error term can be written in the form
2
1
ii
iError a h
∞
=
= ∑ , where the ai are constants that depend on the function f and the value
of x but not on h, one can use different values of h to eliminate the first few indexed

84
constants with the result that the remaining error is a function of h raised to a large
exponent. With this approach, although one can eliminate as many terms as desired, the
resulting accuracy will still be dependent on new unknown constants that are functions
of the unknown but constant ai’s.
Choices of the sequence of hj’s used in this study for numerical integration are
of the form such that the integration interval in question is divided into 3(2K) sub-
intervals for some integer K.39 Round-off error also appears to be controlled better by
particular sets of choices of hj’s for numerical differentiation as well as for numerical
integration. For numerical differentiation, a sequence of hj’s,
{ } 1, , , , , , , , ,2 4 3 6 122 3 2j K Kc c c c c c ch c c −
⎧ ⎫ ⎧ ⎫= ∪⎨ ⎬ ⎨ ⎬⋅⎩ ⎭ ⎩ ⎭
L L ,
are used, for some small integer K, where c is a constant that is easily divisible by 3(2K).
Some additional round-off error can be avoided by choosing the smallest value in the
set to be 2-q for some q>0. Other schemes that worked well utilized sets had 3/2 or 5/4
instead of 3 in the right-hand set of the union above.
First consider differentiation and the sequence, using K = 4, and c = .000024,
{ hj } = {.000024, .000016, .000012, .000008, .000006, .000004, .000003, .000002,
.000001}. With this sequence, we can eliminate the first 8 terms in the infinite sum that
determines the error.
39 This is based on a recommendation contained in Ralston and Rabinowitz (1978) in a section illustrating Romberg integration, quoting Oliver, J. (1971), The Efficiency of Extrapolation Methods for Numerical Integration: Numer. Math., vol. 17, pp. 17-32. Oliver recommended that such a choice, given a fixed amount of computation, gave the highest precision with the least amount of round-off error.

85
First we calculate interim estimates of the derivative, D0j, j = 1,2,…,9, using each of
hj’s. If we call the actual value of the derivative, D, then, we can have for example,
with h2 < h1 :
1 20 1
1
2 20 2
1
ii
i
ii
i
D D a h
D D a h
∞
=∞
=
= +
= +
∑
∑⇒
2 1 22 0 1
1
2 2 21 0 2
1
ii
i
ii
i
h D D a h
h D D a h
∞
=
∞
=
⎛ ⎞= +⎜ ⎟
⎝ ⎠⎛ ⎞
= +⎜ ⎟⎝ ⎠
∑
∑ ⇒ (by subtraction)
( )2 2 2 22 2 2 1 2 1 1 21 0 2 02 2 2 2
11 2 1 2
i i
ii
h h h hh D h DD ah h h h
∞
=
−−= +
− −∑ , where we can call the first term,
denoted as D11, a new estimate. The second term is a new error term in which a1 has
been eliminated since it is multiplied by zero.
Isolating the infinite sum that is the new error term, it can be shown that the
denominator h12-h2
2 evenly divides each numerator and the ith term can be written as
( )1
2 12 2 2( 1)1 2 2 1
1
iji j
ij
h h a h h−
−− −
=
− ∑ . Then, the sum can be expressed as either a function in h1
or h2. Selecting h1 and collecting terms in the infinite sum yields
- h12 ( h2
2a2 + h24a3 + h2
6a4 + …) - h14 ( h2
2a3 + h24a4 + h2
6a5 + …) - h16 ( h2
2a4 + h24a5 +
h26a6 + …) - … ; so, we can write 1 2 2
1 1 21 1
,i ji i j i
i jD D b h b a h
∞ ∞
+= =
= + = −∑ ∑ . Each bi is
O(h22), so the entire new error is O(h1
2h22), with the result that D1
1 is a more precise
estimate than either D01 or D0
2.
Similarly, the error term for D12 can be expressed by collecting terms in h3 to
obtain another first-order improved estimate: 2 2 21 3 2
1 1,i j
i i j ii j
D D b h b a h∞ ∞
+= =
= + = −∑ ∑ .
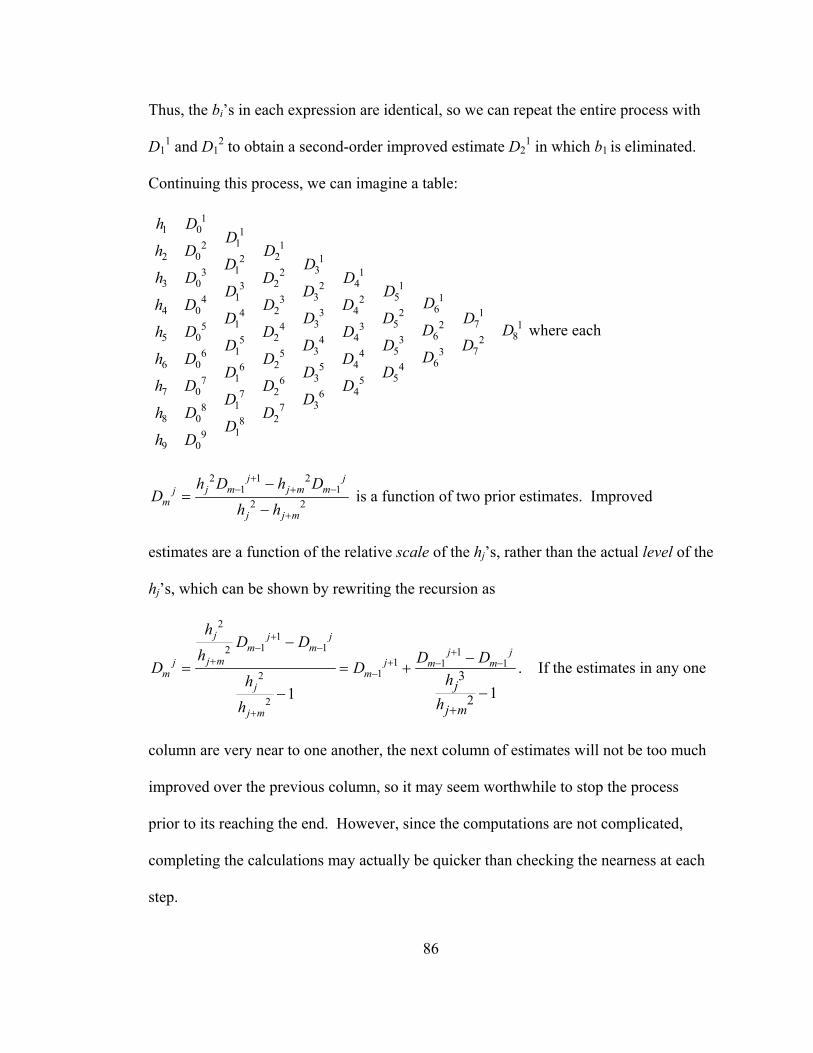
86
Thus, the bi’s in each expression are identical, so we can repeat the entire process with
D11 and D1
2 to obtain a second-order improved estimate D21 in which b1 is eliminated.
Continuing this process, we can imagine a table:
11 0 1
12 12 0 2 12
313 2 13 0 2 42 13
3 51 14 3 264 0 2 43 2 14
3 5 71 2 15 4 36 85 0 2 44 3 25
3 5 71 36 5 466 0 2 45 46
3 517 6 57 0 2 467
318 78 0 28
199 0
h DD
h D DDD
h D D DD DD
Dh D D DD D DD
D Dh D D DD D DD
Dh D D DD DD
h D D DDD
h D DD
h D
where each
2 1 21 1
2 2
j jj m j m mj
mj j m
h D h DD
h h
+− + −
+
−=
− is a function of two prior estimates. Improved
estimates are a function of the relative scale of the hj’s, rather than the actual level of the
hj’s, which can be shown by rewriting the recursion as
21
1 12 11 1 1
12
2
3
2 11
j j jm m j j
j mj j m mm m
j
j m
j
j m
hD D
h D DD Dh
h
hh
+− − +
+ + − −−
+ +
−−
= = +
−−
. If the estimates in any one
column are very near to one another, the next column of estimates will not be too much
improved over the previous column, so it may seem worthwhile to stop the process
prior to its reaching the end. However, since the computations are not complicated,
completing the calculations may actually be quicker than checking the nearness at each
step.

87
Additionally, with a consistent, repetitive choice of hj’s, one can save time by
solving the recursion directly in terms of the original estimates. After calculating the
original estimates, we can use the following linear combination. Approximate values
for K = 4, and c = .000024, shown to 4 significant digits, are:
1.693 D09 - 1.010 D0
8 + 0.3983 D07 – 0.08464 D0
6 + 0.003603 D05 – 0.0002004 D0
4 +
0.000001353 D03 – 0.00000001909 D0
2 + 0.00000000001226 D01
The above is shown to illustrate the relative size of the impact of the various
estimates. Of course, using only 4 significant digits would defeat the original purpose
of reducing error in the approximation.
The exact formula, using the original estimates, is:
* 1 2 3 40 0 0 0
5 6 7 80 0 0 0
90
1 27 32 2781587756250 1414538125 23648625 134750
32768 2592 536870912 8847369095625 30625 1347971625 875875144955146248561678125
D D D D D
D D D D
D
≈ − + −
+ − + −
+
Since many two-sided differentiations are required in some simulations,
considerable computational efficiency can be gained by calculating the end coefficients
a single time initially. This effectively reduces the calculations described over the
previous five pages to a GAUSS “proc” with roughly 15 lines of code in its body.
Often a relatively large value of the constant c allows for smaller absolute errors.
This is despite the fact that each of the initial estimates with the larger values of c
contains (absolutely) more error than it would with smaller values of c. Also, some
values using initial estimates may have small error unpredictably, based on the
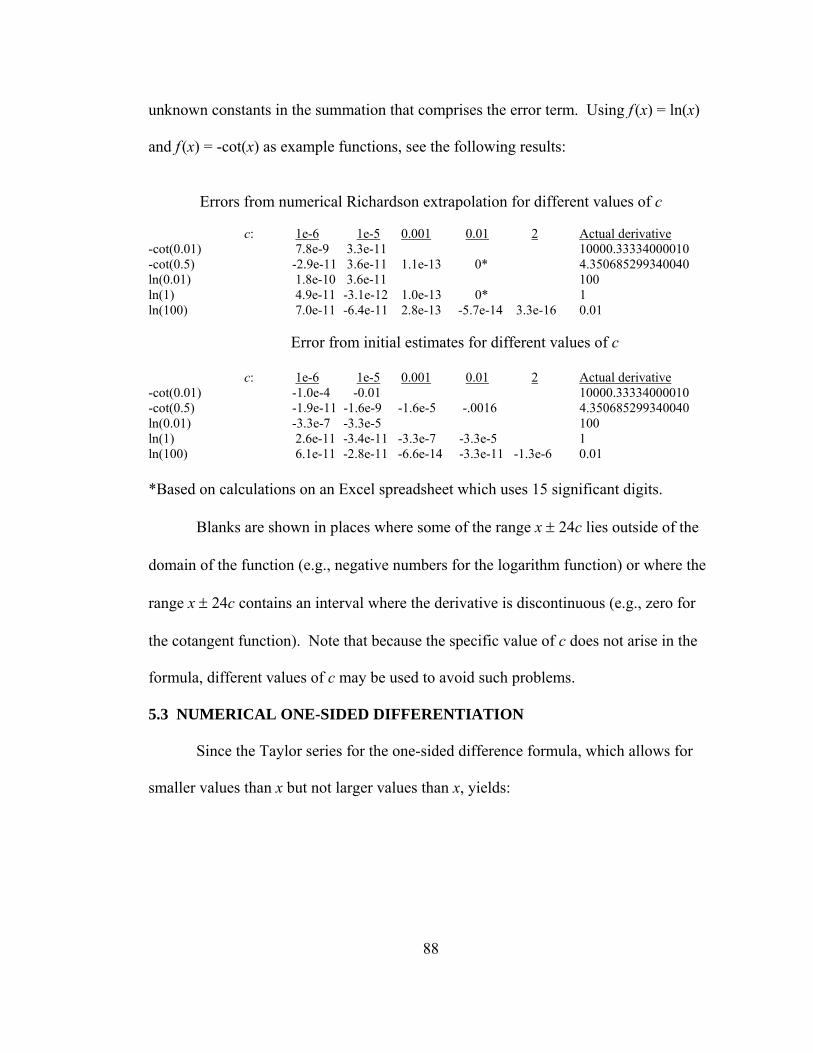
88
unknown constants in the summation that comprises the error term. Using f (x) = ln(x)
and f (x) = -cot(x) as example functions, see the following results:
Errors from numerical Richardson extrapolation for different values of c
c: 1e-6 1e-5 0.001 0.01 2 Actual derivative -cot(0.01) 7.8e-9 3.3e-11 10000.33334000010 -cot(0.5) -2.9e-11 3.6e-11 1.1e-13 0* 4.350685299340040 ln(0.01) 1.8e-10 3.6e-11 100 ln(1) 4.9e-11 -3.1e-12 1.0e-13 0* 1 ln(100) 7.0e-11 -6.4e-11 2.8e-13 -5.7e-14 3.3e-16 0.01
Error from initial estimates for different values of c
c: 1e-6 1e-5 0.001 0.01 2 Actual derivative -cot(0.01) -1.0e-4 -0.01 10000.33334000010 -cot(0.5) -1.9e-11 -1.6e-9 -1.6e-5 -.0016 4.350685299340040 ln(0.01) -3.3e-7 -3.3e-5 100 ln(1) 2.6e-11 -3.4e-11 -3.3e-7 -3.3e-5 1 ln(100) 6.1e-11 -2.8e-11 -6.6e-14 -3.3e-11 -1.3e-6 0.01 *Based on calculations on an Excel spreadsheet which uses 15 significant digits.
Blanks are shown in places where some of the range x ± 24c lies outside of the
domain of the function (e.g., negative numbers for the logarithm function) or where the
range x ± 24c contains an interval where the derivative is discontinuous (e.g., zero for
the cotangent function). Note that because the specific value of c does not arise in the
formula, different values of c may be used to avoid such problems.
5.3 NUMERICAL ONE-SIDED DIFFERENTIATION
Since the Taylor series for the one-sided difference formula, which allows for
smaller values than x but not larger values than x, yields:

89
( ) ( ) ( ) ( )( ) ( )
( )( ) ( )1
1
011 lim
1 !
ii i
hi
f x f x h f x f x h f xf x h
h i h+
+∞+
→=
− − + −′ = + − =
+∑ , the
formula corresponding to what was developed in the preceding section is:
11 1 1
11j
j m
j jj j m m
m m hh
D DD D+
++ − −
−−
= +−
, where the only difference is that the ratio of the hj’s
is not squared. This is a direct result of first order errors remaining in the formula.
Again, considerable efficiency of calculation is acquired here by choosing a
consistent set of hj’s. We can choose a different set of hj’s than was used for two-sided
differentiation. We can also choose to use a set with more values of hj.
Below is experimentation using values of h such that hj+1 = ρhj with ρ < 1 and
constant. With a goal of approaching the same order of precision as obtained from the
2-sided calculations, the belief was the need to eliminate twice as many terms in the
error formula, so evaluations were made at eighteen initial values. (Note that this is no
more work than in the two-sided example, since there are two evaluations needed for
each of the nine initial two-sided estimates.) This choice of ρ = 5/6 was not totally
arbitrary. With this choice, the ratio of the largest h to the smallest h is (6/5)17 ≈ 22.19
which is comparable to the ratio of 24 in the two-sided case. As the ratio gets larger,
the coefficient of the term with the largest h becomes insignificantly small quite rapidly.
By allowing a constant value of ρ, we can determine an analytic conversion
formula directly in terms of the initial estimates. It is convenient to define a linear
backshift operator, B, such that Bk(D0j) = D0
j-k where the superscript for B is an
exponent and the superscript for D0 is an index corresponding to the subscript index of
the hj used to determine the initial estimate D0j.

90
With these definitions, ( )( )
( )180
17
156
56
117
1D
BD
jj
j
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−
−= ∏
=
. This formula can be determined
by directly calculating the first few levels of improved estimates in terms of the initial
estimates, noticing the pattern, and using mathematical induction. The exact expression
is too unwieldy for it to be shown here. However, the final estimate, using 16-digit
precision, is:
180
170
160
150
140
130
120
110
100
90
80
70
60
50
40
30
20
10
*
83396394032.1115483383178526.532504136115633.11448
91496263209.1470552310190188.12630740771846626.7693
652257856211.3439572024763516.11526767784648398.292
68427424279458.56308233875507512.83504189403826679.0
37624190790099139.0767446650048722589.05612097420002130718.0
6527032307384884.67845120886267136.110786915639967163.8
DDD
DDD
DDD
DDD
DDD
DeDeDeD
+−+
−+−
+−+
−+−
+−+
−−−+−−≈
Again, with proper coding, including the ability to vary the exponent of h (1 in
the case of one-sided differentiation, since its error terms are a function of h1; 2 in the
case of two-sided differentiation, since its error terms are a function of h2), these
coefficients can be calculated a single time, using floating-point arithmetic, by the same
GAUSS “proc” with the same fifteen lines of code.
Even with 18 terms, the errors are several orders of magnitude larger than what
was seen with the 2-sided calculations:
Errors from numerical Richardson extrapolation for different values of c
c: 1e-6 1e-5 0.001 0.01 2 Actual derivative -cot(0.01) 2.8e-5 4.9e-7 10000.33334000010 -cot(0.5) 5.2e-7 2.7e-7 -8.6e-10 -9.9e-11 4.350685299340040 ln(0.01) -5.2e-6 -3.1e-7 100 ln(1) -2.7e-7 7.5e-8 -5.9e-10 -6.4e-11 1 ln(100) -7.7e-7 -2.5e-7 7.5e-9 -1.3e-10 2.6e-12 0.01

91
5.4 ROMBERG INTEGRATION.
If we can show that the trapezoid method of numerical integration yields an
error term can be written in the form: ∑∞
=
=1
2
i
iihaError , we can use the same formula to
produce improved estimates as was used in the calculation of two-sided numerical
differentiation. If so, this integration technique will turn out to be a special case of
Richardson extrapolation.
In order to do this, it is helpful to investigate the relationships between several
linear operators: Δ, A,D,Σ, 1, and ∫ which are the difference operator, a forward shifting
operator, the differentiation operator, the summing operator, the identity operator and
the integration operator.
Δ f (x) ≡ f (x+1) - f (x) and A f (x) ≡ f (x+1) ⇒ Δ f (x) = A f (x) - f (x) or, in terms
of operators, Δ ≡ A – 1. Note that Am f (x) = f (x + m).
D (∫ f (x) dx ) = f (x), for many functions, suggesting that D -1 = ∫ .
Define F(x) to be an antidifference function such that Δ F(x) = f (x). So, f (x0) =
F (x0+1)- F(x0). Like antiderivatives, if F(x) is an antidifference function, then so is
F(x) plus an arbitrary constant. Then we have ( ) ( ) ( )1 10 0 0
nn nx xf x F x F x− −
= == Δ =∑ ∑ , so
the application of Σ to the application of Δ to F(x) yields back F(x) for the suitable
summation limits. Then, subject to evaluation at the limits, in terms of operators,
Σ = Δ-1.
The Maclaurin series expansion for f (x) is
( ) ( ) ( ) ( ) ( )2 3
0 0 0 02 3!x xf x f xf f f′ ′′ ′′′= + + + +L , or in terms of operators on f (0):

92
( ) ( ) ( )2 3
2 30 1 0 02 3!
xDx xxA f xD D D f e f⎛ ⎞
= + + + + =⎜ ⎟⎝ ⎠
L . Evaluation at x = 1 yields,
in terms of operators, A = eD, and since Δ ≡ A – 1, then Δ = eD- 1.
So, applying the above, some algebra with operators yields
Σ f (x) = Δ-1 f (x) = (eD- 1)-1 f (x) = (D + D2/2 + D3/3! + D4/4! + …)-1 f (x).
The inversion of this last operator can be accomplished by performing infinite
polynomial long division into a dividend of one, and yields:
( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )
1 3 5 7
12 1
1 1
1 1 1 1 112 12 720 30240 1209600
1 1 1,2 2 1 ! 2 2 ! 2 2 1 !
iji
i ii j
f x D D D D D f x
Tf x dx f x T f x T
i i i j
−
∞ −−
= =
⎛ ⎞= − + − + − + =⎜ ⎟⎝ ⎠
−− + = − + +
+ − +
∑
∑ ∑∫
L
Evaluation of the sum from 0 to n – 1, adding f (n) to both sides, and rearranging
the equation show one form of the trapezoid rule for numerical integration including
error terms.
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )
12 1
0 1 01
2 1 2 10
0 1
2 1 2 10
0 1
1( )2
1( ) 0 02
1( ) 0 02
x nni
ix i xn n i i
ix i
nn i ii
x i
f x f x dx f x T f x
f x f x dx f n f T f n f
f x dx f x f n f T f n f
=− ∞−
= = =− ∞
− −
= =∞
− −
= =
⎡ ⎤= − + ⇒⎢ ⎥
⎣ ⎦
⎡ ⎤= − − + − ⇒⎡ ⎤⎣ ⎦ ⎣ ⎦
⎡ ⎤= − + − −⎡ ⎤⎣ ⎦ ⎣ ⎦
∑ ∑∫
∑ ∑∫
∑ ∑∫
A change of variable to allow for integration on a general range [a,b] with n
subintervals of width h will complete the analysis.
Let g(y) = f (x), y = hx + a, h = (b – a)/n which results in x = (y – a)/h and dy =
h dx. Then ( ) ( ) ( ) 1, ,
y a y ag y f x f g y f
h h h− −′ ′= = =⎛ ⎞ ⎛ ⎞
⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
and

93
( ) ( ) ( )1m mm
y ag y f
hh−
= ⎛ ⎞⎜ ⎟⎝ ⎠
. So, we can obtain
( ) ( ) ( )( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( ) ( )
2 1 2 1 2 1
1
2 1 2 1 2
1
1 1 2 2 ( 2 ) 2 12
0
2 2 ( 2 ) 2 12
0
b
a
i i ii
i
b
a
i i ii
i
y af dy g a g a h g a h g a n h g bh h
T f n f h
hg y dy g a g a h g a h g a n h g b
T f n f h
∞− − −
=
∞− −
=
−⎛ ⎞ ⎡ ⎤= + + + + + + + − +⎜ ⎟ ⎣ ⎦⎝ ⎠
⎡ ⎤− −⎣ ⎦
⎡ ⎤⇒ = + + + + + + + − +⎣ ⎦
⎡ ⎤− −⎣ ⎦
∫
∑
∫
∑
L
L
in which 2
1
ii
iError a h
∞
=
= ∑ and the ai do not depend upon h. So the formula developed
for two-sided differentiation will work to improve initial estimates.
In this case, the algorithm is to select 48k equally spaced sub-intervals on [a,b],
for some integer k, and calculate nine initial estimates, D01 through D0
9, using the
trapezoid method using the following numbers of intervals: {2k, 3k, 4k, 6k, 8k, 12k,
16k, 24k, 48k}. Then, plug the estimates into the formula below to determine the
improved estimate.
* 1 2 3 40 0 0 0
5 6 7 80 0 0 0
90
1 27 32 2781587756250 1414538125 23648625 134750
32768 2592 536870912 8847369095625 30625 1347971625 875875144955146248561678125
D D D D D
D D D D
D
≈ − + −
+ − + −
+
Increasing the value of k can be an additional source of error reduction in the overall
calculation with a concomitant increase in computation time. However, the 48k + 1
functional values necessary for the last trapezoidal estimate with the finest mesh of
intervals can be used for all the coarser trapezoidal estimates as well. Thus, improved

94
estimates can be gained without much more computation than what is necessary for a
single trapezoidal integration.
95
CHAPTER 6
IN THE EVENT OF MULTIPLE REJECTIONS OR MULTIPLE NON-REJECTIONS
6.1 MULTIPLE REJECTIONS
In the event that you cannot determine a suitable distribution of errors for your
data, there are some ways, consistent with this study to estimate a density. Using
splines as basis vectors allows for tractable constrained maximum likelihood estimation,
maximizing over both the model parameters and the coefficients of the basis vectors.
One can form a density that maximizes ( ) ( )1
log ;n
i ii
g u fα ε=∑ , the sum of the logs of
the products of the density in the null hypothesis multiplied by perturbation function
formed by the basis vectors subject to the constraints that ( ); 0, 1,...,ig u i nα ≥ ∀ = .
With splines (at least linear, quadratic and cubic splines), it is relatively easy to
maintain a positive density in all places. As long as the perturbation function is positive
at all knots and all local extrema, it will be positive at other points as well. And
extrema for linear, quadratic and cubic splines are straightforward to determine.
Although I will share some misgivings about this estimate later, I provide an
example for a small set of data, a basis of four cubic splines and a hypothesized
underlying Gaussian error density.

96
0
0.05
0.1
0.15
0.2
0.25
0.3
-8 -6 -4 -2 0 2 4 6 8 10
DataCube SolnCube BaseMLE no dev
Figure 6.1. Estimated density using an underlying Gaussian and a perturbation function dependent on a basis of four cubic B-splines.
For this illustration, I have used 15 data points, the monthly yields from the
CRSP data from December 1957 to February 1959. They are graphed along the x-axis
as triangles. Under the assumption of Gaussian returns, the thickest solid line
represents a Gaussian density with mean and standard deviation equal to the sample
mean and sample population standard deviation. The dashed line is a Gaussian density
with constrained MLE as its parameters, which I will call the base distribution. The
thinner solid line is a density derived by multiplying the base distribution by the
perturbation function. This product density does have a minimum of zero at a point

97
midway between the bulk of the data and the two left-hand outliers. Certainly with
more data, it is not certain that the constraints will be binding and it may be possible to
estimate densities that are everywhere positive. The point of this illustration is to show
that it is possible to perform a constrained maximum and get a result.
Pagan and Ullah report that Gallant and others in three different works40 suggest
the density estimate of φ(x)(1 + b1x + … + bR xR)2, where φ(x) is the standard normal
distribution and (1 + b1x + … + bR xR) is just an R-degree polynomial. They maximize
the log likelihood with respect to b1, … , bR, the coefficients of the polynomial, subject
to the constraints of non-negativity and integration to unity. This method is evidently
called the seminonparametric method of density estimation (emphasis added).
It seems obvious that such an expression is positive for real values of b1, … , bR
since they square the value of the polynomial. This methodology should be easier than
what was illustrated with splines, though it is not clear that it is as flexible.
However, everyone seems to fail to mention that there is a large assumption by
using the Gaussian kernel just as I made. Here I offer another illustration and a large
caveat. Suppose I decided to use a uniform kernel and attempt to find maximum
likelihood estimates. See the next diagram which shows this as a possibility for the
same data as before.
40 Gallant and Tauchen (1989), “Semiparametric Estimation of Conditionally Constrained Heterogenous Processes: Asset Pricing Applications, “ Econometrica, 57, 1091-1120; Gallant, Hsieh, and Tauchen (1991), “On Fitting a Recalcitrant Series: The Pound/Dolalr Exchange Rate, 1974-83,” in Barnett, Powell, and Tachen (eds.), Nonparametric and semiparametric Methods in Econometrics and Statistics, Cambridge University Press, 199-240; and Gallant and Tauchen (1992), “A Nonparametric Approach to Nonlinear Tiem Series Analysis: Estimation and Simulation,” in Brillinger, Caines, Geweke, Parzer, Rosenblatt, and Taqqu (eds.), New Direction in Time Series Analysis, Springer-Verlag, 71-91.
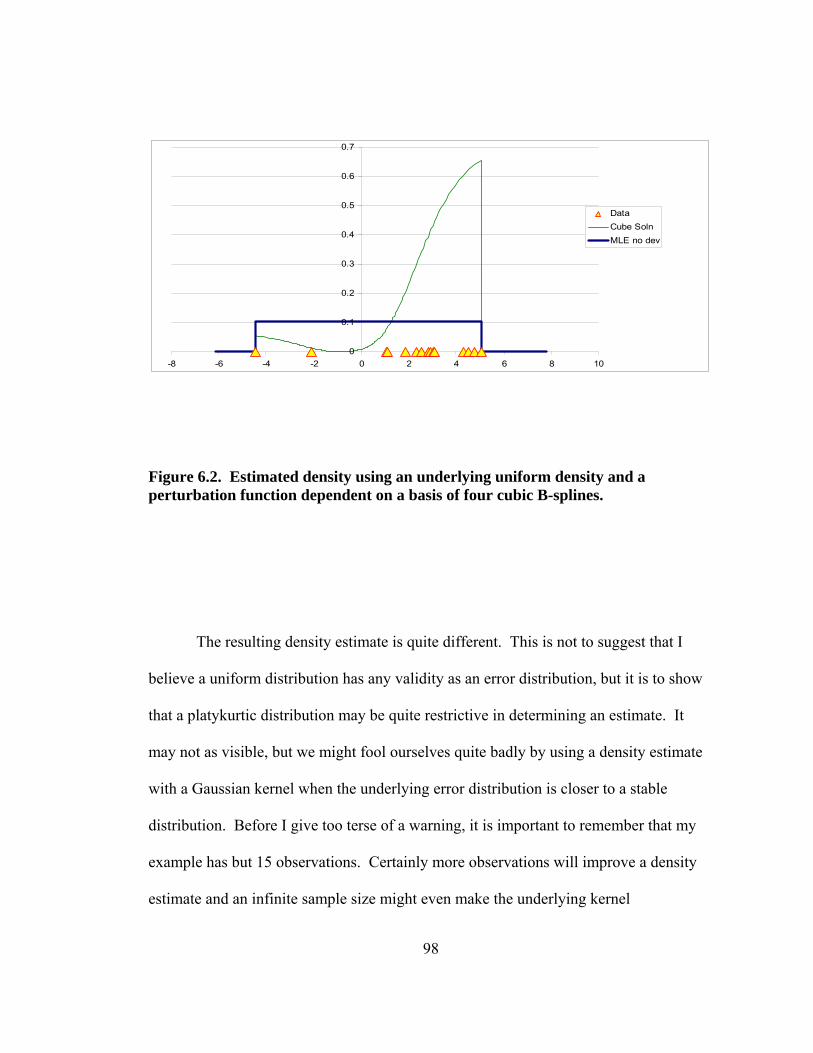
98
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
-8 -6 -4 -2 0 2 4 6 8 10
DataCube SolnMLE no dev
Figure 6.2. Estimated density using an underlying uniform density and a perturbation function dependent on a basis of four cubic B-splines.
The resulting density estimate is quite different. This is not to suggest that I
believe a uniform distribution has any validity as an error distribution, but it is to show
that a platykurtic distribution may be quite restrictive in determining an estimate. It
may not as visible, but we might fool ourselves quite badly by using a density estimate
with a Gaussian kernel when the underlying error distribution is closer to a stable
distribution. Before I give too terse of a warning, it is important to remember that my
example has but 15 observations. Certainly more observations will improve a density
estimate and an infinite sample size might even make the underlying kernel

99
insignificant, as would a prior distribution of beliefs be seriously less significant to a
Bayesian in view of overwhelming subsequent empirical evidence against those beliefs.
Then what should we do? My advice is to be wary, fit the density to multiple
kernels and carefully assess the risk involved in making any inferences. A stable is not
automatically the answer as it will increase tail probabilities based just as a Gaussian (or
a uniform) will decrease them. At this point I do not have enough evidence to refute
using a Gaussian kernel as Gallant et al. do, but I do think it would be judicious to be
quite cautious with conclusions derived from it, especially those dependent on tail
probabilities. Additionally, analogous to the major premise of this work with regards to
model parameters, any such density estimate will likely fit the data too well, better than
the data fits the true underlying distribution.
6.2 MULTIPLE NON-REJECTIONS
The Lagrange Multiplier tests studied herein are designed to be used with model
parameters and correct for the over-acceptance of any null hypothesis that one finds
with the more naïve GFTs. The tests are not designed to, for example, select between
two or a few competing distributions. If you “know” or wish to choose between two
distributions, it will be better to simply use maximum likelihood as a criteria between
the two with any necessary adjustment if one model has the advantage of more
parameters. If you remain troubled between two or a few distributions, a Bayesian
approach with some weighted average of the competitors might even be reasonable.
It may be better to choose based on some appealing aspects of one distribution
based on theory, economic or probabilistic, or even to employ the most parsimonious

100
model in line with Box and Jenkins original advice on time series or the much earlier
advice in the spirit of Occam’s razor.
Above all, my recommendation would be similar to what was given in the
previous section. Absent compelling statistical or economically theoretical data to the
contrary, be very cautious. Do sensitivity analysis with multiple models to see what
difference the different distributions might make. Although you may have to adjust
critical points if you are employing multiple statistical tests, you do not want your name
on a study that suggests it is not economically efficient to build higher levees around
New Orleans based on a Gaussian kernel without even employing some leptokurtic
alternatives.
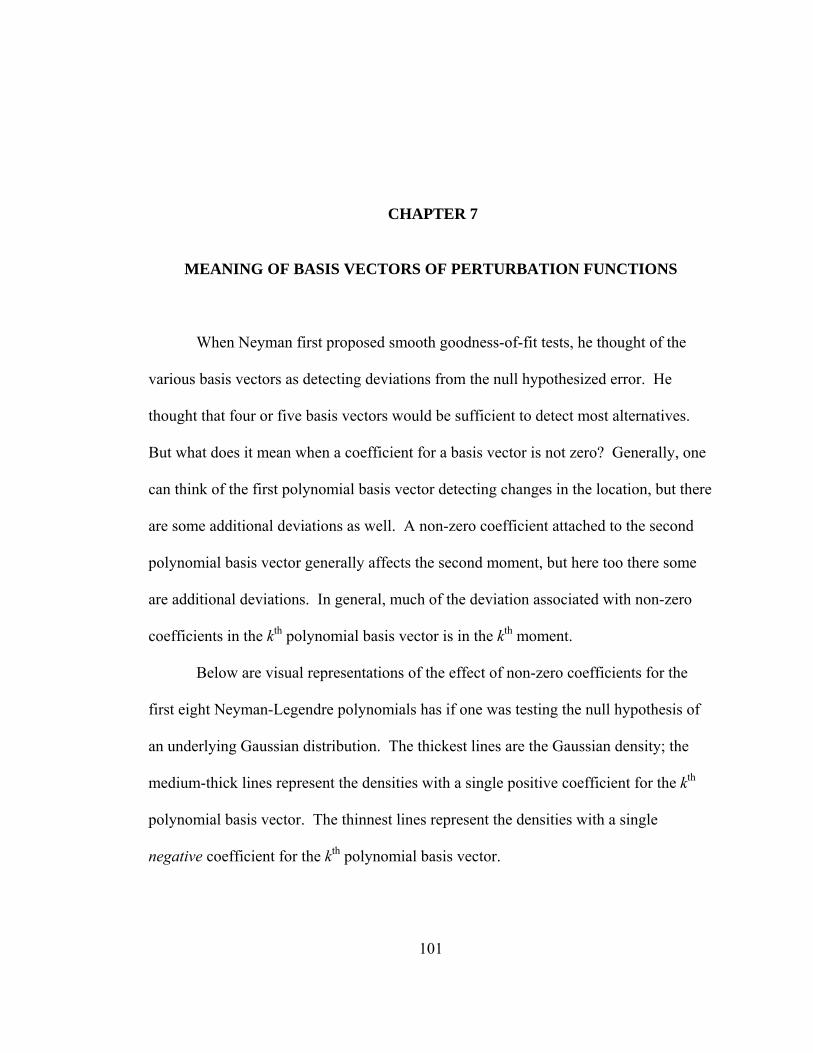
101
CHAPTER 7
MEANING OF BASIS VECTORS OF PERTURBATION FUNCTIONS
When Neyman first proposed smooth goodness-of-fit tests, he thought of the
various basis vectors as detecting deviations from the null hypothesized error. He
thought that four or five basis vectors would be sufficient to detect most alternatives.
But what does it mean when a coefficient for a basis vector is not zero? Generally, one
can think of the first polynomial basis vector detecting changes in the location, but there
are some additional deviations as well. A non-zero coefficient attached to the second
polynomial basis vector generally affects the second moment, but here too there some
are additional deviations. In general, much of the deviation associated with non-zero
coefficients in the kth polynomial basis vector is in the kth moment.
Below are visual representations of the effect of non-zero coefficients for the
first eight Neyman-Legendre polynomials has if one was testing the null hypothesis of
an underlying Gaussian distribution. The thickest lines are the Gaussian density; the
medium-thick lines represent the densities with a single positive coefficient for the kth
polynomial basis vector. The thinnest lines represent the densities with a single
negative coefficient for the kth polynomial basis vector.
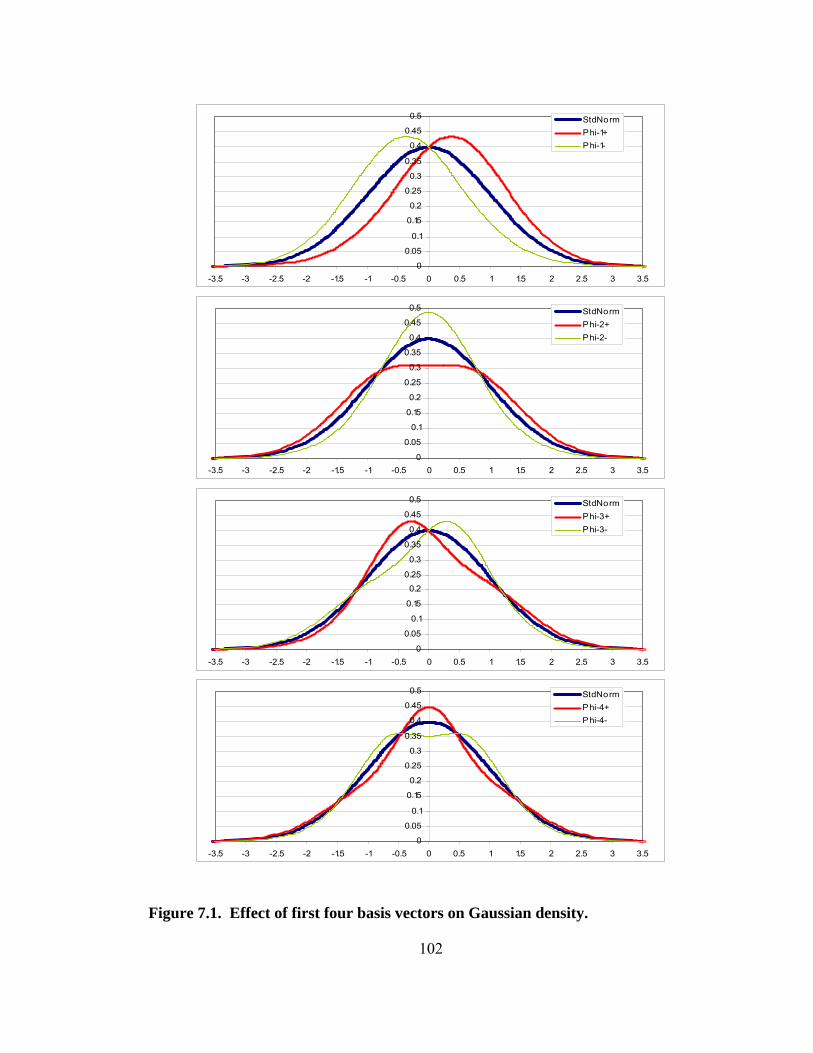
102
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5
StdNormPhi-1+Phi-1-
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5
StdNormPhi-2+Phi-2-
0
0.05
0.1
0.15
0.20.25
0.3
0.35
0.4
0.45
0.5
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5
StdNormPhi-3+Phi-3-
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5
StdNormPhi-4+Phi-4-
Figure 7.1. Effect of first four basis vectors on Gaussian density.

103
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5
StdNormPhi-5+Phi-5-
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5
StdNormPhi-6+Phi-6-
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5
StdNormPhi-7+Phi-7-
0
0.05
0.1
0.15
0.20.25
0.3
0.35
0.4
0.45
0.5
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5
StdNormPhi-8+Phi-8-
Figure 7.2. Effect of basis vectors five through eight on Gaussian density.
104
One can observe from the density affected by the first basis vector that there is
more than a simple shift in location as the maximum height of the density increases,
whether the coefficient is positive or negative. Similarly, in perusing the second graph,
we can see some change in kurtosis rather than just a change in variance. The third and
fourth graphs do exhibit changes in skewness and kurtosis, but something more.
There is a bit of a problem in describing the density changes in the remaining
graphs because we have no standard words for what changes when the 5th through 8th
moments change. The 5th and 7th describe changes that are obviously odd functions; I
suppose we could call these (after skewness) 5-ness and 7-ness or, perhaps, quintness
and septness. The 6th graph is particularly striking, showing waves and four relative
modes for a positive coefficient with three for a negative coefficient. Both the 6th and
8th graphs are even functions so candidate names might be (after kurtosis) 6-tosis and 8-
osis or sextosis and octosis. Certainly, a better linguist might come up with better
names; however, it is helpful to visualize just what types of deviations the different
basis vectors can cause. Of course, linear combinations of them might cause some other
striking densities.

105
CHAPTER 8
TIME DEPENDENT ERRORS Can these types of GFT tests be used with dependent errors with ARMA, ARCH,
GARCH type models?
The short answer is yes, given that maximum likelihood estimation of the model
in question is possible and that the model can be transformed to one with independently,
identically distributed random variables. It is not my intention to prove this, but to give
enough detail to convince the reader of the likely success of proceeding in this
direction, should the situation suggest a time-dependent model.
8.1 EXAMPLES USING TIME SERIES MODELS
Consider a general GARCH(p,q) model:
yt = h(Xt;β) + ηt , t = 1,…,T
where yt is the observed dependent variable at time t, Xt is a row vector of known
constants at time t (and is uncorrelated with ηt ), β is a vector of unknown coefficients,
with function h(Xt;β ) being possibly non-linear;
σ2t = ω + A(L,ξ)η2
t + B(L,ζ )σ2t
where σ2t is the time-varying variance of the innovations, ω > 0, A(L,ξ ) and B(L,ζ) are
lag polynomials with the vectors: ξ and ζ, respectively, having p and q coordinates. For
shorthand in what follows, let λ = (ω, ξ , ζ). Thus, a GARCH(1,1) model would have
σ2t = ω + ξ1η2
t - 1 + ζ1 σ2t – 1.

106
With any GARCH model, ηt = σtεt , with εt ~ IID, mean zero, scale 1, and,
although, it is commonly assumed that εt ~ N(0,1), we can have:
H0: ε t ~ F(z;γ) vs. H1: ε t ~ G(F(z;γ)), independent of t
where G(u) is defined by its density function: g(u) = G'(u) = ( )∑=
+m
jjj u
11 φα .
Presume that one can estimate θ = (β', λ', γ')' of the restricted model indicated by
the null hypothesis by maximum likelihood and form estimates of the ε t for testing.
Depending on the simplicity of the strategy for estimating GARCH models, one can
estimate θ = (β', λ', γ')' of the restricted model indicated by the null hypothesis by
maximum likelihood as follows:
We have estimates of ηt rather than εt, so we need use a change-of-variable
transformation to find the density of the ηt’s. We have
( ) ( ) ( ) ( ) ( )βλσγ
βλση
θηβλση
εβλσ
ηε
,1;
,;~
,1,
, tt
tt
tt
t
t
tt ff
dd
⎟⎟⎠
⎞⎜⎜⎝
⎛=⇒== .
Note: In computing maximum likelihood, not only is σ2t a function of λ = (ω, ξ , ζ), but
it also depends on past values of ηt = yt - h(Xt;β), so it has the parameter β.
So, ( ) ( ) ( ) ( ) ( )βλσγβλσ
ηβλσγ
βλση
η ,ln21;
,ln,ln;
,ln~ln 2
tt
tt
t
tt fff −⎟⎟
⎠
⎞⎜⎜⎝
⎛=−⎟⎟
⎠
⎞⎜⎜⎝
⎛= . Then
the log likelihood function to maximize would be:
( ) ( )( ) ( )∑
=⎥⎦
⎤⎢⎣
⎡−⎟⎟
⎠
⎞⎜⎜⎝
⎛ −=
T
tt
t
tt XhyfXyl
1
2 ,ln21;
,;
ln,; βλσγβλσ
βθ .

107
To proceed further, it may more instructive to use a specific example. With a
GARCH(1,1) and f a standard Gaussian, we have:
( ) ( )( )( ) ( )∑ ∑
= =
−−
−=T
t
T
tt
t
tt XhyCXyl
1 1
22
2
,ln21
,;
21,; βλσ
βλσβ
θ
It remains to solve for σ2t = ω + ξ1η2
t - 1 + ζ1 σ2t – 1, in terms of the data.
(1 - ζ1L)σ2t = ω + ξ1( yt - h(Xt;β))2
“Dividing” by (1 - ζ1L) yields:
( )( ) ( )( ) ( )( )2 2 22 21 1 1 1 2 2 1 3 3
1
; ; ;1t t t t t t ty h X y h X y h X
ωσ ξ β ζ β ζ β
ζ − − − − − −= + − + − + − +−
⎡ ⎤⎣ ⎦L .
Depending on your software and your patience, you could maximize this function by
substituting zeros for the terms prior to the sample. More accurately, you could perhaps
substitute the unconditional expectation of the terms. Taking the unconditional
expectation of both sides of the equation yields:
11
2
11
121
0
21
1
2
1111
1 ζξωσ
ζω
ζξ
σζσξζ
ωσ−−
=⇒−
=⎟⎟⎠
⎞⎜⎜⎝
⎛−
−⇒+−
= ∑∞
=
i
i
.
More accurately still, under the assumption of Gaussian errors, you could backcast
many simulated pre-samples based on initial estimates of the parameters and re-estimate
the parameters until you were satisfied that you (or your hardware) were too tired to do
any more estimation.
With an appeal to asymptotic behavior, perhaps the specific method is of lesser
concern. Nevertheless, one of these ways, we get estimates of εt, as functions of our
estimates of ηt and σt2. Since the εt’s are iid, we can test whether the εt were generated

108
by our hypothesized distribution, F, or a more general distribution G ° F, by the same
procedures as outlined earlier.
As additional examples, consider an AR(1) model and an MA(1) model:
AR(1): yt = h(Xt;β) + ηt , t = 1,…,T
ηt = ρηt-1 + εt εt iid ~ F
⇒ εt = yt - h(Xt;β) - ρ[ yt-1 - h(Xt-1;β) ]
So you can plug this formula into any likelihood in place of εt and proceed with the
hypothesis test.
MA(1): yt = h(Xt;β) + ηt , t = 1,…,T
ηt = εt -νεt-1 εt iid ~ F
⇒ ( ) ( )( ) ( )( ) L−−−−−−= −−−− βνβνβε ;;; 222
11 ttttttt XhyXhyXhy
So, similar to the GARCH example already shown, a choice must be made about what
to do to estimate data prior to the sample. This simplest assumption, which is not as
bad as in the GARCH example is to assume prior εt = 0, although there are better ways
especially if the estimate of η1 is large in absolute value.
In conclusion, the Lagrange multiplier tests should be applicable in any situation
in which we can isolate independent, identically distributed random variables and we
can make maximum likelihood estimates of the restricted model.
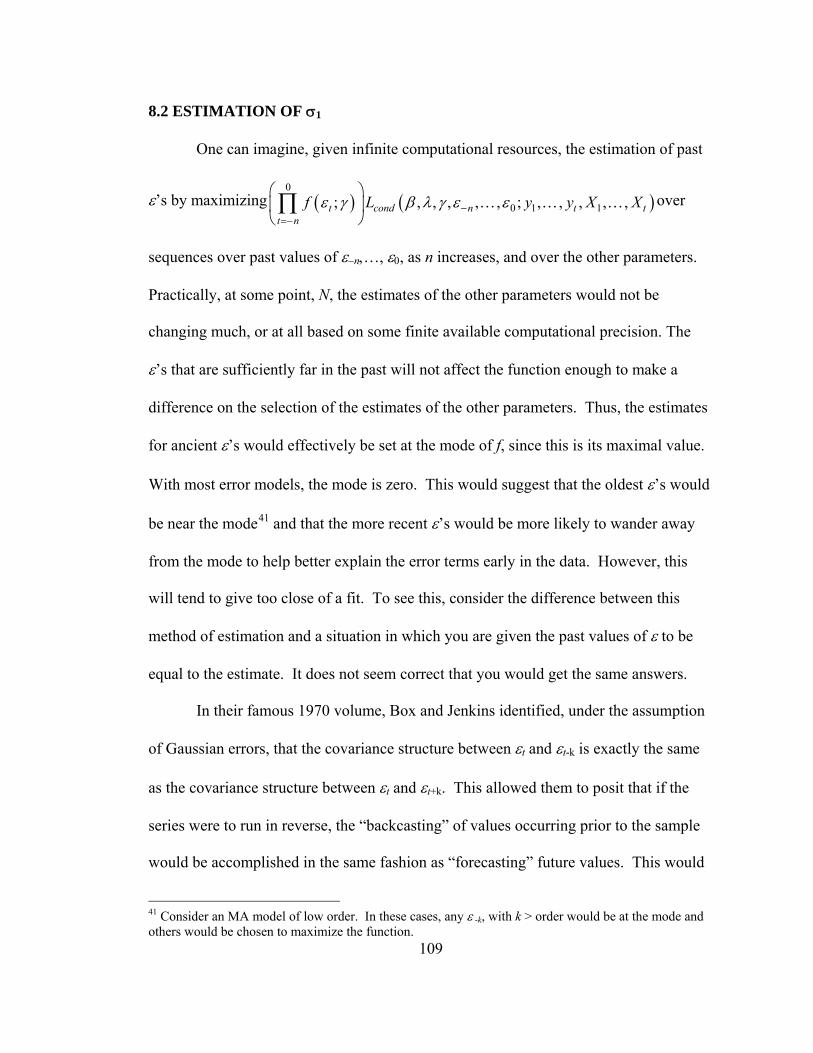
109
8.2 ESTIMATION OF σ1
One can imagine, given infinite computational resources, the estimation of past
ε’s by maximizing ( ) ( )0
0 1 1; , , , , , ; , , , , ,t cond n t tt n
f L y y X Xε γ β λ γ ε ε−=−
⎛ ⎞⎜ ⎟⎝ ⎠∏ K K K over
sequences over past values of ε−n,…, ε0, as n increases, and over the other parameters.
Practically, at some point, N, the estimates of the other parameters would not be
changing much, or at all based on some finite available computational precision. The
ε’s that are sufficiently far in the past will not affect the function enough to make a
difference on the selection of the estimates of the other parameters. Thus, the estimates
for ancient ε’s would effectively be set at the mode of f, since this is its maximal value.
With most error models, the mode is zero. This would suggest that the oldest ε’s would
be near the mode41 and that the more recent ε’s would be more likely to wander away
from the mode to help better explain the error terms early in the data. However, this
will tend to give too close of a fit. To see this, consider the difference between this
method of estimation and a situation in which you are given the past values of ε to be
equal to the estimate. It does not seem correct that you would get the same answers.
In their famous 1970 volume, Box and Jenkins identified, under the assumption
of Gaussian errors, that the covariance structure between εt and εt-k is exactly the same
as the covariance structure between εt and εt+k. This allowed them to posit that if the
series were to run in reverse, the “backcasting” of values occurring prior to the sample
would be accomplished in the same fashion as “forecasting” future values. This would
41 Consider an MA model of low order. In these cases, any ε -k, with k > order would be at the mode and others would be chosen to maximize the function.

110
have the effect of using the mean of the ε−t’s in place of the actual value. Box and
Jenkins did not discuss the effect of this on the estimates.
Following is a method to estimate the unconditional distribution of σ12 from the
data rather than be satisfied with a standard conditional distribution of σ2|σ1.42 Instead
of using a simulation to calculate sample σ2’s after initial estimates have been made of
the parameters, estimate the σ2’s that you have from an applicable formula. For
example, the one below is applicable to a GARCH(1,1) model43:
( )( ) ( )( ) ( )( )2 2 22 21 1 1 1 2 2 1 3 3
1
; ; ;1t t t t t t ty h X y h X y h X
ωσ ξ β ζ β ζ β
ζ − − − − − −= + − + − + − +−
⎡ ⎤⎣ ⎦L .
Generally, these estimates of σ2’s likely are a by-product of the initial estimation of
parameters. One immediately notices the infinite series and the fact that some of the
terms must be pre-sample. It may be uncomfortable filling in estimates for data points
that are pre-sample with something like an expectation, but something like this has been
done already to get the initial parameter estimates (or some initial data has been not
fully used), so the parameter estimates are intrinsically not better than whatever the
routine did about estimating the σ2’s. Also, the later terms are multiplied by constants
that are dying out exponentially, so the estimate may not be too bad; appealing to 42 The following was inspired by a conversation with my dissertation supervisor J. Huston McCulloch during a meeting on the primary portion of the dissertation. 43 yt = h(Xt;β) + ηt , t = 1,…,T where yt is the observed dependent variable at time t, Xt is a row vector of known constants at time t (and is uncorrelated with ηt ), β is a vector of unknown coefficients, with function h(Xt;β ) being possibly non-linear;
σ2t = ω + ξ1η2
t - 1 + ζ1 σ2t – 1
where σ2
t is the time-varying variance of the innovations, ω > 0, ξ1, ζ1 > 0.
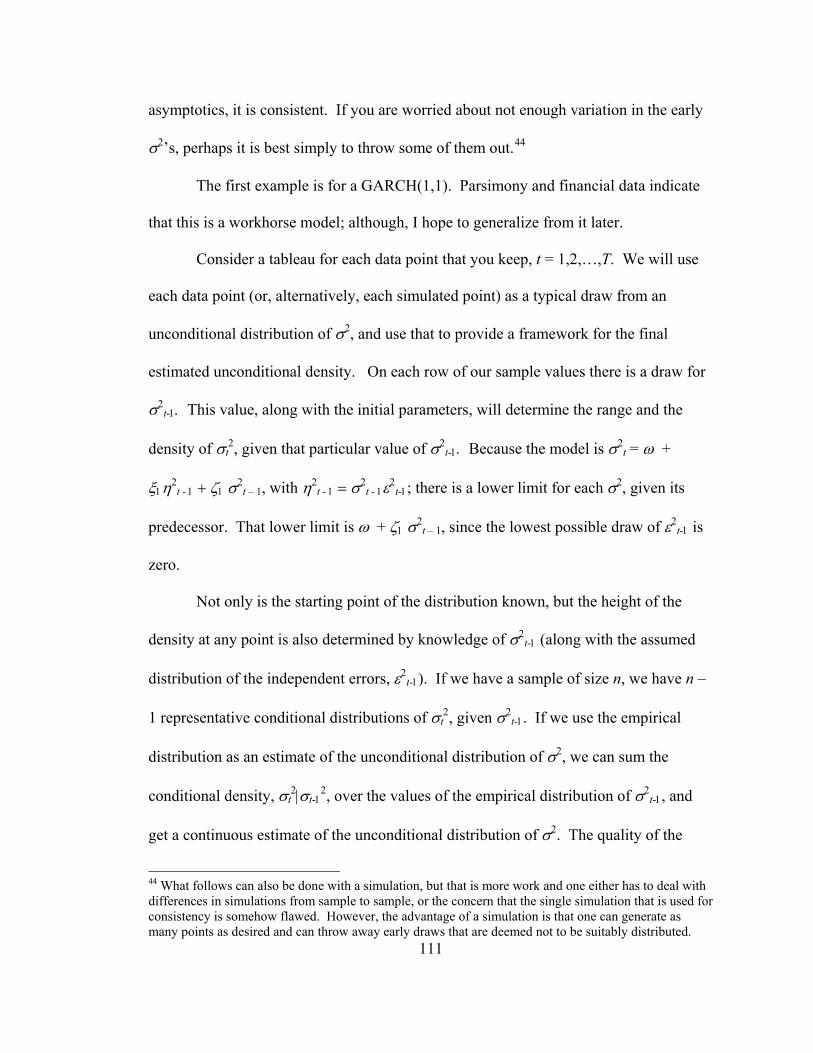
111
asymptotics, it is consistent. If you are worried about not enough variation in the early
σ2’s, perhaps it is best simply to throw some of them out.44
The first example is for a GARCH(1,1). Parsimony and financial data indicate
that this is a workhorse model; although, I hope to generalize from it later.
Consider a tableau for each data point that you keep, t = 1,2,…,T. We will use
each data point (or, alternatively, each simulated point) as a typical draw from an
unconditional distribution of σ2, and use that to provide a framework for the final
estimated unconditional density. On each row of our sample values there is a draw for
σ2t-1. This value, along with the initial parameters, will determine the range and the
density of σt2, given that particular value of σ2
t-1. Because the model is σ2t = ω +
ξ1η2t - 1 + ζ1 σ2
t – 1, with η2t - 1 = σ2
t - 1ε2t-1; there is a lower limit for each σ2, given its
predecessor. That lower limit is ω + ζ1 σ2t – 1, since the lowest possible draw of ε2
t-1 is
zero.
Not only is the starting point of the distribution known, but the height of the
density at any point is also determined by knowledge of σ2t-1 (along with the assumed
distribution of the independent errors, ε2t-1). If we have a sample of size n, we have n –
1 representative conditional distributions of σt2, given σ2
t-1. If we use the empirical
distribution as an estimate of the unconditional distribution of σ2, we can sum the
conditional density, σt2|σt-1
2, over the values of the empirical distribution of σ2t-1, and
get a continuous estimate of the unconditional distribution of σ2. The quality of the
44 What follows can also be done with a simulation, but that is more work and one either has to deal with differences in simulations from sample to sample, or the concern that the single simulation that is used for consistency is somehow flawed. However, the advantage of a simulation is that one can generate as many points as desired and can throw away early draws that are deemed not to be suitably distributed.

112
continuous estimate will be dependent on the quality of the empirical estimate, since the
conditional distributions will be exact (or numerically very close); however, the
continuous estimate will look more like the actual distribution since it will be defined
on an infinite continuous support, the positive real line.
Shown below are pictorial representations of what the individual contributions
to the overall estimate look like for ω = 1, ξ1 = 0.4, ζ1 = 0.2, assuming Gaussian errors.
I have selected densities from the 1st, 25th, 50th, 75th, and 99th percentiles from a sample
of 10,000.
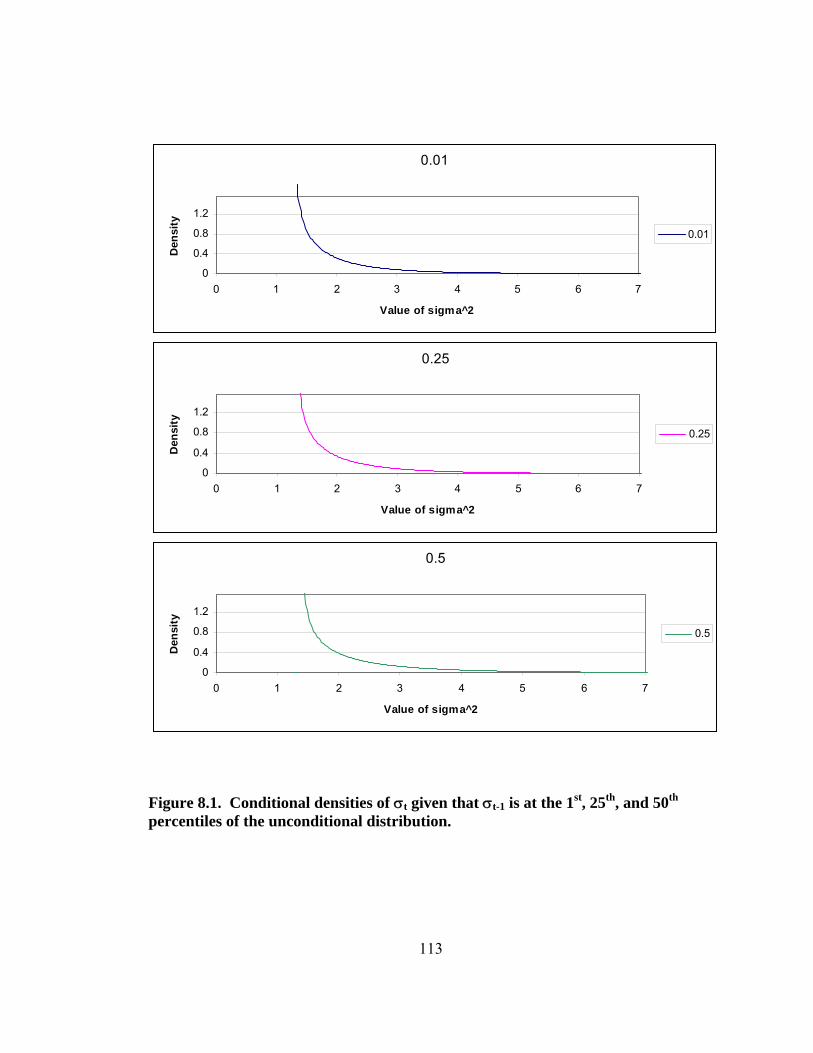
113
0.01
0
0.4
0.8
1.2
0 1 2 3 4 5 6 7
Value of sigma^2
Den
sity
0.01
0.25
0
0.4
0.8
1.2
0 1 2 3 4 5 6 7
Value of sigma^2
Den
sity
0.25
0.5
0
0.4
0.8
1.2
0 1 2 3 4 5 6 7
Value of sigma^2
Den
sity
0.5
Figure 8.1. Conditional densities of σt given that σt-1 is at the 1st, 25th, and 50th percentiles of the unconditional distribution.
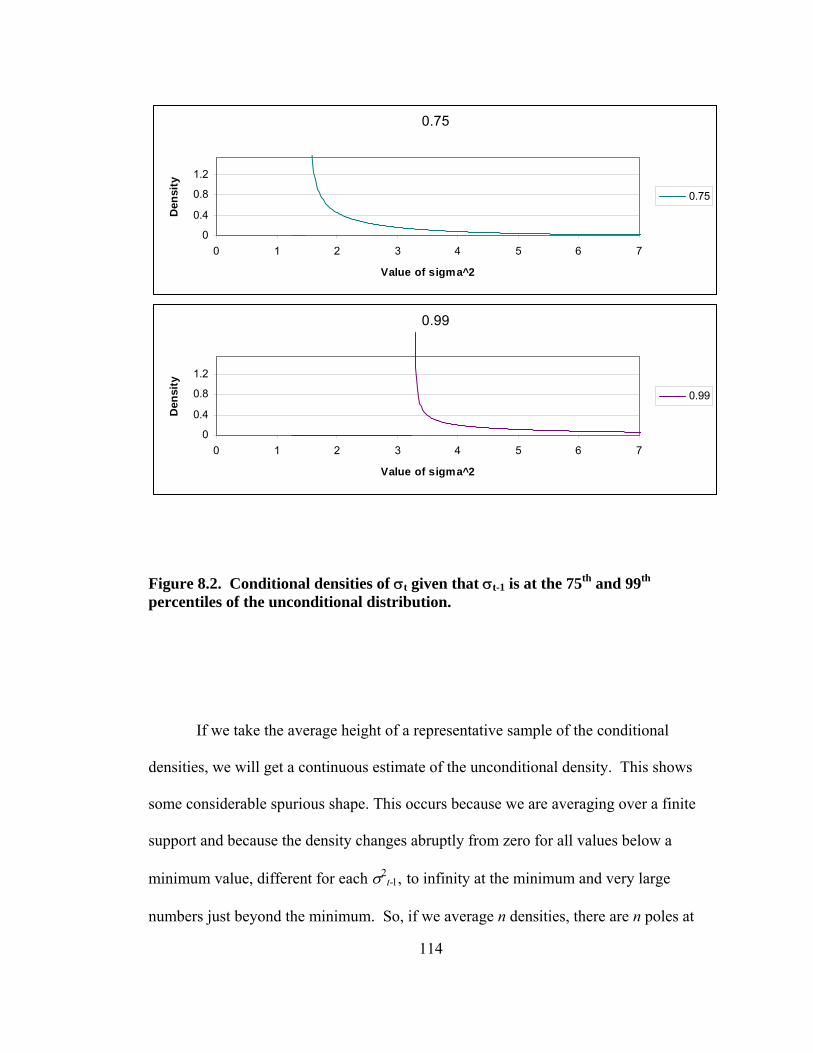
114
0.75
0
0.4
0.8
1.2
0 1 2 3 4 5 6 7
Value of sigma^2
Den
sity
0.75
0.99
0
0.4
0.8
1.2
0 1 2 3 4 5 6 7
Value of sigma^2
Den
sity
0.99
Figure 8.2. Conditional densities of σt given that σt-1 is at the 75th and 99th percentiles of the unconditional distribution.
If we take the average height of a representative sample of the conditional
densities, we will get a continuous estimate of the unconditional density. This shows
some considerable spurious shape. This occurs because we are averaging over a finite
support and because the density changes abruptly from zero for all values below a
minimum value, different for each σ2t-1, to infinity at the minimum and very large
numbers just beyond the minimum. So, if we average n densities, there are n poles at

115
the n minima. Because of that, both smoothing and scaling techniques may be
necessary to make the distribution look differentiable and integrate to unity.
Shown below is what could be called the Density Method, so called since it is
the result of the average of the densities, in this case of the 99 percentiles. So, this is the
result of using 99 out of a possible 10,000 sample σ2t-1’s.
Average - Density Method
0
0.4
0.8
1.2
0 1 2 3 4 5 6 7
Value of sigma^2
Den
sity
Average
Figure 8.3. Sum of 99 conditional densities to approximate the unconditional density.
This can be improved upon greatly by using a Distribution Method, with the
same sample points, but averaging the cdf rather than the pdf. This is because the

116
distribution is continuous, although its derivative fails to exist at the n poles of the
density. Then the density, using the Distribution Method, is calculated by taking central
differences at each point of evaluation.
Average - Distribution Method
0
0.4
0.8
1.2
0 1 2 3 4 5 6 7
Value of sigma^2
Dis
trib
utio
n
Average
Figure 8.4. Sum of 99 conditional cdfs to approximate the unconditional cdf.
It is still the case that the density does not exist at the poles, but since I am
taking central differences around each pole, I am getting a fairly poor numerical
estimate of the derivative, which happens to be closer to the density for values outside
the immediate neighborhood of the poles. In this case, two wrongs make it look right.
However, the smooth parts of the graph are slightly too low to be the unconditional

117
density, whereas the volatile spikes upward are too high when compared with the
unconditional density.
Average - Distribution Method
0
0.4
0.8
1.2
0 1 2 3 4 5 6 7
Value of sigma^2
Den
sity
Average
Figure 8.5. Unconditional density derived from unconditional cdf.
Because of the special selection of points, it would be unrealistic to get such a
good representation if the sample size is only 99; however, the estimate is still fairly
accurate as is shown by the chart below which uses the last 99 points of the sample of
10,000. The chart is bigger, because the differences would be less detectable on a
smaller scale.
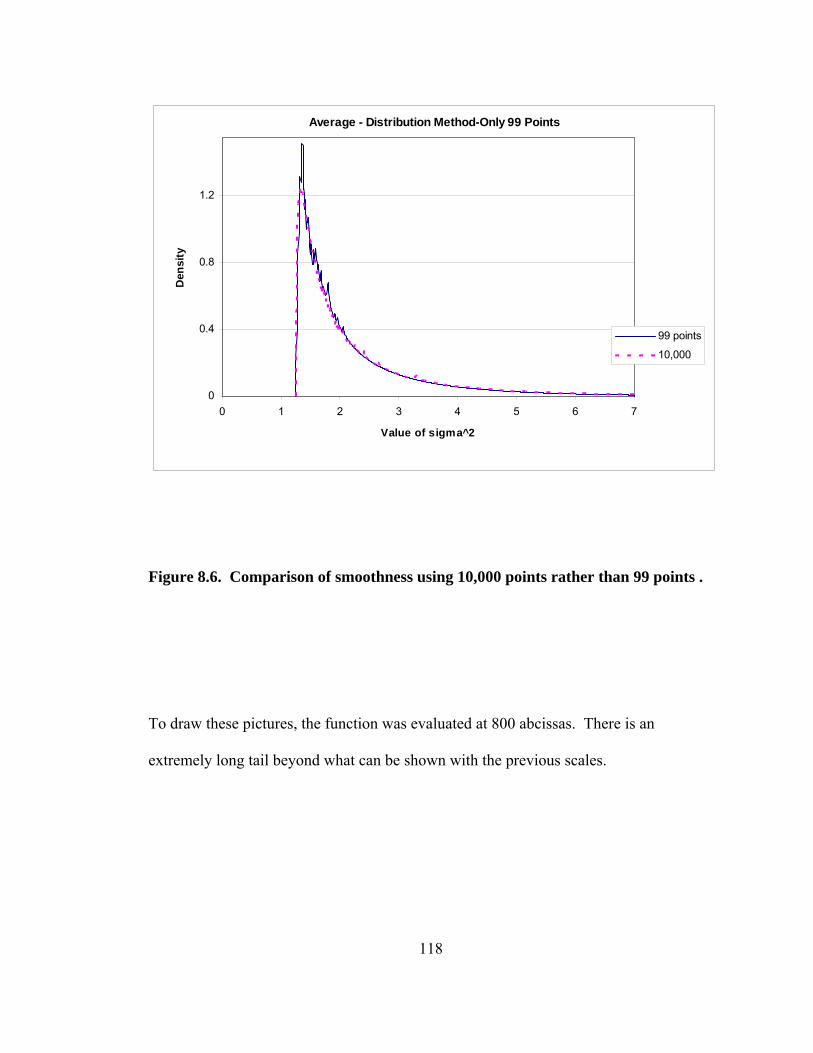
118
Average - Distribution Method-Only 99 Points
0
0.4
0.8
1.2
0 1 2 3 4 5 6 7
Value of sigma^2
Den
sity
99 points
10,000
Figure 8.6. Comparison of smoothness using 10,000 points rather than 99 points .
To draw these pictures, the function was evaluated at 800 abcissas. There is an
extremely long tail beyond what can be shown with the previous scales.

119
Tail - Distribution Method
0
0.0020.004
0.0060.008
0.01
7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
Value of sigma^2
Den
sity
Average
Figure 8.7. Upper tail of unconditional distribution of σ .
With either method, the unconditional density of σ2 can be determined at as
many or as few points as desired by the practitioner by the use of a formula. Shown
below is the formula for the density:
( )( ) 1
2
1 12
1
1
12
20
1,
~
1ζ
ωσζωσξ
ξζωσ
σ−
>−−
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −−
= ∑=
n
i ii
i
i
uu
uu
f
nh , where
( ) ( )⎩⎨⎧ −<
=otherwiseuf
zf i
0~ 2
1 ωσζε and ui is the ith realization from the sample of σ2 standing
in for the values of σ2t-1. If you deem the sample to be too small to suitably estimate the
unconditional density, one could select n1 equally spaced quantiles from h0, and

120
substitute them into the formula above as values of u (using n1 instead of n), to get a
perhaps smoother estimate h1(σ2).
Where does this formula come from and can it be generalized to GARCH(p,q)
and ARCH(p) models? The answer to the latter question is “yes” and its explanation
will be deferred. For the answer to the former, proceed.
The model for GARCH(1,1) is σ2t = ω + ξ1η2
t - 1 + ζ1 σ2t – 1, with
η2t - 1 = σ2
t -1ε2t-1. To proceed with a formula, there must be an assumption that the
distribution of εt-1 ~ f (0,1) for some function where, WLOG, the location and scale
parameters can be set to zero and one, respectively, by the presence of a location
parameter in the model and by scaling of σ2t-1. Since the ε ’s are independent, the time
subscript can be dropped in the expressions that presently follow.
The conditional distribution of σ2t | σ2
t-1 is the constant ω + ζ1 σ2t – 1 plus the
random variable, ε2, scaled by ξ1σ2t – 1. Whenever we know the density of ε2, which
we will know if we know the density of ε , we will know the conditional density of σ2t
| σ2t-1.
With the common assumption of Gaussian errors, we know that ε2 ~ χ2(1). If
we assume ε ~ f (0,1) with support (-∞,∞), then, through transformation of variables, we
know the density, g, of ε2 is ( ) ( ) ( )[ ]22
2
2
21 εεε
ε ffg +−= on (0,∞). If f is
symmetric, then, simply, ( ) ( )2
22
ε
εε fg = on (0,∞). If we let u be a particular value of
σ2t-1, then with one more transformation, ε2 = (σ2
t - ω − ζ1 u) / ξ1u, dε2/dσ2t = 1 / ξ1u,

121
we get the conditional density ( )( ) ⎟⎟
⎠
⎞⎜⎜⎝
⎛∞
−∈
−−
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −−
= ,1
,|1
2
12
1
1
12
2
ζωσ
ζωσξ
ξζωσ
σuu
uuf
uh . Up
to this point, the density is exact; there has been no estimation. The estimation appears
when we substitute the empirical distribution of σ2 for the unconditional distribution for
u (= σ2t-1 ). Summing over the n points and multiplying by the probability of each
point, 1/n in the empirical distribution, we get the formula indicated earlier.
This formula is perfectly general. We can eliminate one of the transformations
if we know the distribution of ε2 in addition to knowing the distribution of ε. In the
examples that follow, let y = ε2 for ease of notation:
If ε is Cauchy, ( )( ) yy
yg+
=1
1π
; if ε is Student-t, ( ) ( )( ) ( ) 2
1
2
21
1+
+
+Γ
Γ= r
ryr
r
yryg
π; if ε is
G.E.D., ( ) ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛−
Γ=
−22
1
1exp
2
α
α
α yyyg . Even if we cannot write down the density as in
the case of the symmetric stable distribution, if we can numerically determine the
density, we can numerically determine the density of the random variable that is the
square: ( ) ( )yyf
yg = for symmetric densities and ( ) ( ) ( )[ ]yfyfy
yg +−=2
1 for
non-symmetric. In all the foregoing cases, the support for y is (0,∞).
So, this formula works for many error functions. How can we generalize to
other GARCH models? It turns out that the generalization for more “GARCH”
(variance) terms is easier than the generalization for more “ARCH” (innovation) terms,

122
so I will start with the “GARCH” generalization. To begin with, what if there are zero
variance terms and 1 ARCH term?
The formula just reduces to:
( )( )
ωσωσξ
ξωσ
σ >−
⎟⎟⎠
⎞⎜⎜⎝
⎛ −
= ∑=
2
12
1
1
2
20 ,
~
1 n
i i
i
u
uf
nh
With q GARCH terms and 1 ARCH term, the formula becomes:
( ) ( ) ∑∑
∑
∑
=
+−
=
=
=
−>
⎟⎟⎠
⎞⎜⎜⎝
⎛−−
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛−−
−−= q
kk
qn
i q
kikki
q
kikk
uu
u
uf
qnh
1
21
1
1
211
11
1
2
20
1,
~
11
ζ
ωσ
ζωσξ
ξ
ζωσ
σ , where uik =
σ2i,t-k and ( ) ( )
⎪⎩
⎪⎨⎧
−<= ∑=
otherwise
ufzfq
kkk
0
~ 2
1ωσζε . This expansion is accomplished essentially
by placing the sum of all the GARCH terms where the first term was in the previous
formula.
In this case, we are first finding an exact representation of the conditional
distribution of σ2t | σ2
t-1, σ2t-2, …, σ2
t-q and then using the n – (q - 1) sequences of {σ2t-1,
σ2t-2, …, σ2
t-q} that we have in the sample:
{σ2q, σ2
q-1, …, σ22, σ2
1}, {σ2q+1, σ2
q, …, σ23, σ2
2},…{σ2n, σ2
n-1, …, σ2n-q+1}, so
as to preserve the potential relationships between consecutive σ2’s, and serve as an
empirical estimate of the distribution of the q-tuple, (σ2t-1, σ2
t-2, …, σ2t-q).
123
It is more difficult to deterministically update h0 to h1, since you need a q-tuple from the
multivariate distribution. There are iso-percentile q-1 dimensional surfaces and it is not
as clear which points from these surfaces would be representative. Monte Carlo
simulation may be a way to go, if you are unhappy with the first pass estimate.45 In
order to acquire the multivariate distribution that you need, there will be q-1
integrations necessary. In the following example with q = 2, let x=σ2t, y = σ2
t-1,
z = σ2t-2.
The idea is then hxy(x,y) = h(y) hx|y(x| y) with hx|y(x| y) = ∫ hx|y,z(x| y,z) h(z) dz.
Since we have hx|y(x| y) and h(x), which equals h(y) and h(z), we have:
( ) ( )( )
( )dzzhzyxy
yzyxf
yhyxhzy
xy ∫∞
−− −−−
⎟⎟⎠
⎞⎜⎜⎝
⎛ −−−
=211 211
1
21~
,ζζ
ωζζωξ
ξζζω
Additional ARCH terms make the formula more difficult in that there are p-1
integrations involved. Of course, zero ARCH terms would not be too interesting as the
variance would converge to a long-term variance deterministically.
Consider a GARCH(2,1) model: σ2t = ω + ξ1η2
t - 1 + ξ2η2t - 2 + ζ1 σ2
t-1
The key difference is that the random variable to be added to the deterministic part is
the sum of two random variables that we know the distribution to.
45 See appendix for using quasi-random number generation rather than the more common pseudo-random number generation methods.

124
Given f as the pdf of ε, we have the pdf of z1 = ξ1η2t - 1, with u1 = σ2
t-1, to be
( )111
11
1
11 zu
uzf
zgξ
ξ ⎟⎟⎠
⎞⎜⎜⎝
⎛
= and the pdf of z2 = ξ2η2t - 2, with u2 = σ2
t-2, to be
( )222
22
2
22 zu
uz
fzg
ξ
ξ ⎟⎟⎠
⎞⎜⎜⎝
⎛
= , both on the support (0,∞). The density of the sum is obtained
along with a nuisance random variable by a two-dimensional bijective transformation,
11011
22
211
22
211 =−
=⇒⎭⎬⎫
=−=
⇒⎭⎬⎫
=+=
Jyz
yyzzy
zzy
We get ( ) ( ) ( ) ∞<<<−= 12222112112 0,, yyygyygyyφ . To get the distribution
that we are interested in, we must integrate out y2, so
( )( )∫
⎟⎟⎠
⎞⎜⎜⎝
⎛
−
⎟⎟⎠
⎞⎜⎜⎝
⎛ −
= 1
0 2222
22
2
2111
11
21
11
ydy
yu
uy
f
yyu
uyy
fy
ξ
ξ
ξ
ξφ
One more transformation from y1 to σ2 yields a formula for GARCH(2,1).
( )( )
21 1
21 1 2 2
1 1 1 2 20 220 21 2 2 21 1 1 1 2
2
1
1 ,1
1
i
i
n iu i
i ii i
u y yf fu uh dy
n u yu u y
σ ω ζ
σ ω ζξ ξ
σξξ σ ω ζ
ωσζ
− − −
=
⎡ ⎤⎛ ⎞− − − ⎛ ⎞⎢ ⎥⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥⎝ ⎠ ⎝ ⎠= ⎢ ⎥− ⎢ ⎥− − −
⎢ ⎥⎢ ⎥⎣ ⎦
>−
∑ ∫
%
where ( ) ( )⎩⎨⎧ −<
=otherwiseuf
zf0
~ 211 ωσζε
. The integral in general must be evaluated
numerically.

125
The generalization to GARCH(p,q), then involves replications of what has
already been discussed, first finding a joint distribution involving the sum of p random
variables, then integrating out p – 1 of them.
( ) ∑ ∫ ∫ ∫+−
=
−
−− −−− −−−
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∑ ∑ ∑∑
+−=
= = ==1
1
integrals 1
0 0 0
201
22
1
2
21
2
11 rn
i
p
u yu yuq
kikk
q
kikk
p
jj
q
kikk
rnh
4444444 84444444 76
L
ζωσ ζωσ ζωσ
σ
2
1 2
1 1
1 222
1 11 2
2
1
,
1
q p
k ik jk j
i j
p j ijp p
q p j j ij ji k ik j
k j
q
kk
u yf
u yf
udy dy dy
u yu u y
σ ω ζ
ξξ
ξξ σ ω ζ
ωσζ
= =
−=
= =
=
⎤⎛ ⎞⎥⎜ ⎟− − −⎥⎜ ⎟⎥⎜ ⎟ ⎛ ⎞ ⎥⎜ ⎟ ⎜ ⎟ ⎥⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎥⎥⎛ ⎞⎥− − −⎜ ⎟⎜ ⎟ ⎥⎝ ⎠⎥⎥⎥⎦
>−
∑ ∑
∏∑ ∑
∑
%
L
where r = max [p,q] and ( ) ( )⎪⎩
⎪⎨⎧
−<= ∑=
otherwise
ufzfq
kkk
0
~ 2
1ωσζε
Since, in practice, p and q are 0, 1, or 2, the general formula usually simplifies to
something less foreboding.

126
CHAPTER 9
TEST RECOMMENDATIONS FOR FINANCIAL DATA
This paper introduces a wide range of goodness-of-fit tests. One of the
reasonable questions that can be raised is, “Which one of these tests should be used in a
particular study?” Criteria that might be selected for determining the best test to use are
size distortion and power against likely prescribed alternatives.
As an example, we have tested the proposed econometric goodness-of-fit tests
on the residuals of monthly stock market returns with empirically determined
parameters. Different practitioners have proposed stable, Student-t, GED, and a
mixture of normal distributions to fit the leptokurtosis that prevents the Gaussian
distribution from adequately explaining the residuals. Those past presumptions fueled
the choices of distributions selected.
The empirically determined parameters for the four distributions, using
maximum likelihood estimation, in looking at log excess real monthly returns January,
1953, through December, 2002, were as follows46:
Symmetric stable: α = 1.8622, ln scale = 1.0239, δ = 0.5846
46 These estimates were determined by an adapted Broyden-Fletcher-Goldfarb-Shanno method which was a constrained search over the parameter spaces. Special attention must be given to preventing a routine to go beyond 2 in its search for alpha in a stable distribution or beyond 0 and 1 in its search for p in a mixture of two Gaussians. In addition special routines had to be developed to obtain fast accurate densities for the GED, generalized Student-t, and mixture of two Gaussians. McCulloch’s SYMSTB software, described in "Numerical Approximation of the Symmetric Stable Distribution and Density," in Adler et al. was employed to obtain densities for the symmetric stable case.

127
Generalized student: degrees of freedom = 6.8640, ln scale = 1.2931, mean = 0.6410
Generalized error distribution (GED): power = 1.4187, ln scale = 1.5679, mean =
0.6700
Mixture of Two Gaussians: probability of first standard deviation = 0.9059,
ln(first st. dev.) = 1.3084, ln(second st. dev.) = 2.1247, mean = 0.5935
These were the values used in some simulations for either null hypotheses or
simple alternative hypotheses. It is important to note that the conclusions to be drawn
from this U.S. equities market example may not be applicable in other arenas, although
this example is certainly represented by a broad expanse of literature.
The size distortion and power against the other distributions have been tested for
each of the four leptokurtic distributions.
All sizes and powers are based on simulations using 1000 draws from the Kiss
monster random number generator, described in more detail in the Appendix. All data
is generated based on the empirical market parameters under the assumptions that the
log excess returns were generated by one of the four hypothesized distributions. There
are two test sizes investigated for each scenario, 0.10 and 0.05. There are from 1 to 20
basis parameters tested, 3 to 20 for the Cubic Splines.
Six sample sizes were tested, 31, 100, 316, 1000, and 3162 and 10,000 (10k, k =
3/2 , 2, 5/2 , 3, 7/2 , 4). We tested the size distortion for each Model-Parameter-sensitive
(referred to as “corrected”) goodness-of-fit test and did the same using conventional
(referred to as “naïve”) tests.
There are 18 power tests per null hypothesis, based on 6 possible sample sizes
with 3 possible alternative hypotheses. For each category there is a size-adjusted power

128
for the corrected tests and non-adjusted powers for both the corrected tests and the naïve
tests.
Two types of bases were used to determine goodness-of-fit parameters: the
Cubic Spline basis and the Neyman-Legendre basis. Based on previous samples, the
conclusion was reached that the Neyman-Legendre polynomial basis and the Cubic
Spline basis generally outperformed the other bases investigated (Pearson, the
Quadratic Spline and the Linear Spline). So, in the interest of spending more time on
additional repetitions in the simulations rather than more time on bases that will not be
recommended, only the former two bases are investigated here.
9.1 SIZE DISTORTION
There is tremendous size distortion with the naïve tests in every instance for
every level of parameters. This distortion does not go away as the sample size increases
from 32 to 10,000. It diminishes somewhat as the number of basis parameters goes up,
but this is still not very helpful. The distortion is in the direction of over-acceptance.
For the corrected tests, there is initial size distortion, generally much smaller
than the naïve tests. The size distortion vanishes, within sampling error, for moderate
sample sizes. For some of the largest samples of 10,000, calculation error seems to
have crept in, magnified as the number of basis parameters increases, first with the
Neyman-Legendre basis then with Cubic Spline basis. This was not entirely
unexpected with the Neyman-Legendre basis as rounding errors had been identified
earlier. It is our belief that calculation of the test statistics by quadrupling the number
of intervals for numeric integration would mitigate these errors although that is
unknown at this time due to the tremendous amount of time that each simulation takes.

129
If this presumption is correct, the tests would continue to work well for small number of
parameters and very large sample sizes. The test itself can easily quadruple or increase
by 16-fold the number of intervals when a single calculation is performed; however, the
multiplicity required by all the simulation possibilities makes each new check quite
formidable in terms of time.
For the mixture and as little as 100 observations, with up to 6 basis variables, the
size distortion is undetectable. For 316 observations and the level 0.10 test, most all the
basis parameters are just barely in the low end of the confidence interval. For 1000 and
more observations, there is no discernible distortion.
Distortion gradually disappears for the stable null from 316 to 1000 as well,
although it is small for smaller sample sizes with small numbers of basis parameters as
well. For Student nulls, distortion dies out at only 100 observations. GED nulls require
around 316 observations.
9.2 POWER
The over-acceptance caused by the size distortion in the naïve tests contributes
to poor power against the chosen nulls. With the naïve tests, fitting the model
parameters biases against rejecting any false hypotheses. Hence, practitioners may all
too often mistakenly conclude that, since their test does not reject an alternative
hypothesis, they are justified in accepting the validity of the assumptions in their study.
The naïve tests have power even less than the test size for sample sizes that are quite
high!
The corrected tests do have more power than the naïve tests. However, for small
sample sizes, even with the corrected tests, it is quite difficult to tell these leptokurtic

130
distributions from one another. The positive thing about this is that when the sample
size is high enough for there to be reasonable levels of power (4 to 5 times the test size),
there is negligible size distortion. This means that, in the cases investigated, a user of
this test would not have to go through the trouble of size-adjustment, which means no
lengthy simulations are necessary!
Recommendations can be made based on the null hypothesis chosen, since the
null will be known by the user. There are significant power gains to be made by giving
different recommendations for different nulls, so that is what is done below.
9.3 WITH A STABLE NULL
A GED distribution can start to be detected with as little as 316 observations.
By this time, it is also clear that a pattern which has a power peak at only 2 model
parameters (3 for the Spline). This power peak also works well for “seeing” a Student.
The mixture, with its extra parameter, is quite difficult to identify requiring more than
3000 observations, even to get modest 30% power levels. At 10,000 observations the
most power comes from a large number of parameters. But at 10,000 observations, any
number of parameters (more than 2) will have the same (100%) power levels for the
less leptokurtic random variables. At this number, it is recommended to use the Cubic
Spline, perhaps with 15 parameters, because it has fewer numerical difficulties than the
Neyman as the number of parameters increases.
Included are three of many possible graphs to make that illustration. Others are
included in Appendix I. These graphs represent sample sizes of 316 (105/2) observations
with a stable null hypothesis, at a test size of α = 0.10, using the values for parameters
equal to what was stated at the beginning. The first graph shows that there is negligible

131
size distortion for the corrected test, using 1000 simulations. This is determined
because the corrected test statistics, shown by dark blue diamonds and pink squares, lie
mostly in a 95% confidence interval around 0.10 ( )( )⎟⎟⎠
⎞⎜⎜⎝
⎛±
10009.01.096.110.0 . The 95%
confidence interval is shown by dashed gray lines that are just slightly higher than 0.08
and lower than 0.12.
Actual Size and 95% Conf Limits around 0.10Stable, 316 observations, 0.10 test
0
0.020.040.060.08
0.10.12
0.14
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Figure 9.1. Empirical size of 0.10 tests using the naïve and corrected Cubic Spline and Neyman GFTs using numerical quadrature.
This low size distortion of the corrected tests can be contrasted with the
significant size distortion of the naïve tests, shown by the green and orange “×’s.”
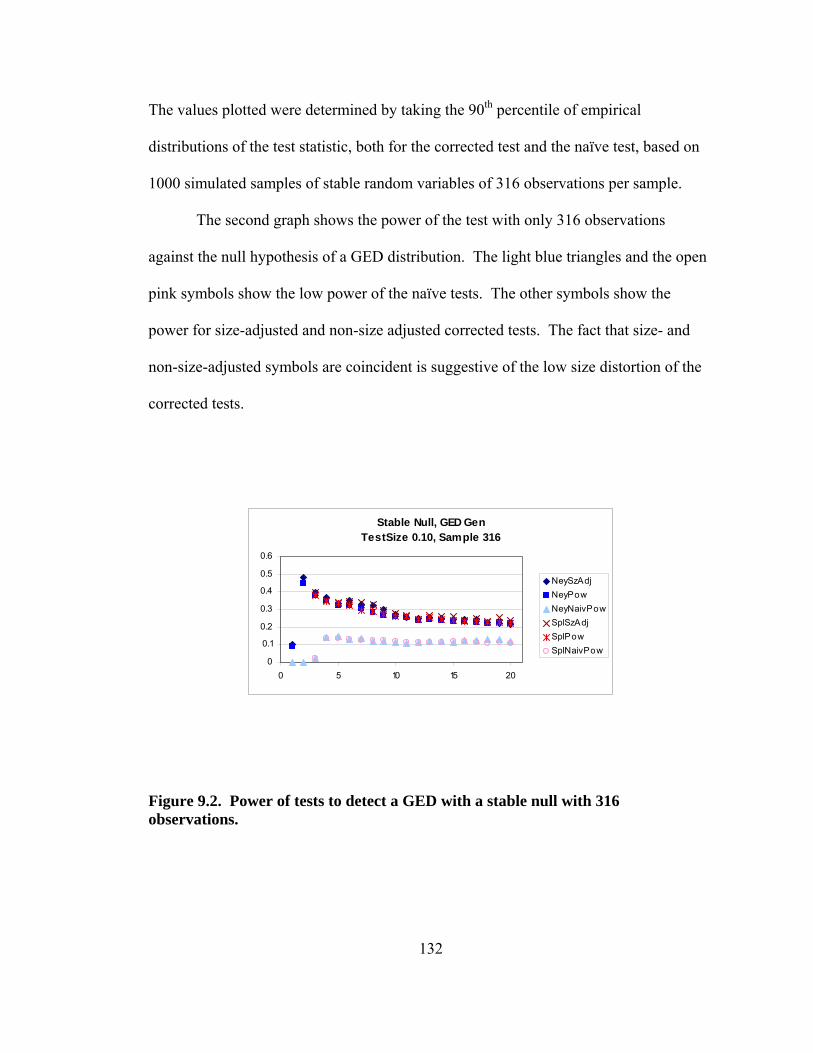
132
The values plotted were determined by taking the 90th percentile of empirical
distributions of the test statistic, both for the corrected test and the naïve test, based on
1000 simulated samples of stable random variables of 316 observations per sample.
The second graph shows the power of the test with only 316 observations
against the null hypothesis of a GED distribution. The light blue triangles and the open
pink symbols show the low power of the naïve tests. The other symbols show the
power for size-adjusted and non-size adjusted corrected tests. The fact that size- and
non-size-adjusted symbols are coincident is suggestive of the low size distortion of the
corrected tests.
Stable Null, GED GenTestSize 0.10, Sample 316
0
0.1
0.2
0.3
0.4
0.5
0.6
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Figure 9.2. Power of tests to detect a GED with a stable null with 316 observations.

133
The next graph shows the power gains when the sample size is increased from
316 observations to 1000 observations.
Stable Null, GED GenTestSize 0.10, Sample 1000
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Figure 9.3. Power of tests to detect a GED with a stable null with 1000 observations.
For the rest of the null hypotheses, recommendations about number of basis
parameters are given.
9.4 WITH A STUDENT-T NULL
A stable distribution can be seen almost half the time with 316 observations.
Just about any number of parameters (greater than 2) will work equally effective. GED
and mixtures are still concealed for the most part at this observation level, but a test
with 2 or 3 parameters has the best chance of finding them. So, if a Student is your null,
go with 2 or 3 parameters, regardless of sample size.

134
9.5 WITH A GED NULL
GED’s magic number is 4 parameters. The smallest 3 bases have really bad
power; then, there is a tremendous increase at 4, with ever so little decreases after that.
9.6 WITH A MIXTURE NULL
Unless you have at least 2000 observations, there is no reason to try to test
against the other three possibilities. The mixture pattern seems to be a bit different in
that higher numbers of parameters seem to yield more power. For this reason, the
Cubic Spline is recommended here to avoid numerical inaccuracy, with about 15
parameters. At 10,000, even with the possible inaccuracies, the test with 8 parameters
seems to have fairly low distortion levels, so it would be safe to use against the chosen
alternatives.
9.7 BASIS SIZE VS. SAMPLE SIZE
The original thought was that, in searching for a test with maximal power, one
might find some relationship between the number of basis vectors, m, and the sample
size, n, such as m ∝ n1/2 or m ∝ n2/5. Whereas, it is still the belief that m can increase
with n, I now believe this increase in m will either terminate or plateau and then proceed
quite slowly until n achieves a level high enough to allow for identification of a nonzero
α for the next-highest basis vector. This relationship is highly dependent on the
relationship between a particular null hypothesis and the underlying error distribution.
For a particular underlying error distribution and null hypothesis, the test as
proposed determines the gradient at α=0 towards a vector α∗ = (α1, α2, … , αm),

135
different than a zero vector, which, along with the choice of basis functions, in a sense
identifies the best alternative density in the set of alternative hypotheses.
With some sets of basis vectors and a given sample size, it may be the case that
a test with a subset of the basis vectors is more powerful than the entire set of basis
vectors. Let me illustrate that. The typical test is equally sensitive in each of the m
dimensions, so it will reject the null hypothesis in the event that (a12 + a2
2 + … + am2)1/2
> λm, where the ai’s are estimates for the αi’s. If, for example, it was known that αm = 0,
then the (m – 1)-order test which would reject in the event that (a12 + a2
2 + … + am-12)1/2
> λm-1. Since λm-1 < λm, the (m - 1)-order test would then be more sensitive to
deviations from zero of the remaining α’s, (α1, α2, … , αm-1). Note that if αm is not near
zero then it is possible that the larger set of basis vectors will provide the more powerful
test.
Given a particular underlying distribution (with the data already transformed
based on a particular null hypothesis) and a particular set of basis functions Φ, one
could imagine an infinite α−vector such that α'Φ was equal to the function that is the
correct alternative to the uniform distribution. If for example, the basis functions were
orthogonal polynomials and the underlying density was a polynomial of degree r
transformation of the null density, the length of the α−vector could be shortened to r,
with all ordinates greater than r being zero.
My supposition is that if the alternate density can be exactly represented by a
finite set of the basis functions, r, then regardless of how large n gets, there should not
be additional power gained by increasing the level of m beyond r.

136
If one could then imagine a sample of size n being drawn from this alternate
density, to the extent that n is small, sample error could mask the identity of the true
underlying density. As n gets larger, the sample will get closer and closer to mirroring
the true density.
Allow me to draw an admittedly imperfect analogy. In a footnote, I will note
some of the imperfections with some solutions, but the analogy is clearer without these
complications. Presume a simple polynomial basis with a sample size of n independent
draws from an alternative density. There should be some analogy to the rejection of the
null hypothesis in favor of the alternative hypothesis and the identification of a nonzero
coefficient in a related regression.
If the sample was drawn from the null hypothesis density, the expected values of
the order statistics would be i/n+1, , i = 1,2, …, n. Hence, one could reasonably write
y(i) = i/n+1 + εi.47
So one could test the null hypothesis by performing a regression, using the
ordered transformed sample, y(1) , y(2) , … , y(n) as regressands and the series 1/n+1, 2/n+1,
… , n/n+1 as the related regressors, xi, i = 1,2, …, n, in a model such as:
y(i) = β0xi + β1xi2 + β2xi
3 + …+ βmxim+1 + εi
with the goal to identify nonzero β’s (or a β0 ≠ 1). If n is too small, even if all of the β’s
with positive indices are nonzero, we may not be able to identify all of them (or perhaps
47 One of the imperfections with this analogy is that the εi’s are not independent and are heteroskedastic. One can remove the independence problem by imagining n draws each from n independent samples, then selecting y(i) from the ith sample, i = 1,2, …, n. The y(i)’s will still have different variances, however, these differences can be accommodated by a properly weighted regression technique. In fact a single sample can be used by noting and adjusting for the covariances between these order statistics.

137
any of them) as being more than a couple standard deviations from zero. This would be
analogous to finding α’s different than zero in the primary problem.
With some samples one might identify a β as properly being nonzero, while in
other ones this will go unnoticed. As n increases, depending on the size of β, there will
be a greater and greater chance of it being identified as nonzero, but this indicates an
increase in power as n increases for a fixed level of m, not an indication that m should
increase in proportionally to some fractional power of n.
If the density could be represented by the sum of r products (α1φ1 + α2φ2 + … +
αrφr) with r < m, the test that one of the m β’s would be nonzero would be less powerful
than fitting an r-degree polynomial and testing whether one of the first r β’s were zero.
For smaller sample sizes, even if it takes r basis vectors to exactly fit the
alternate density, a basis with fewer than r elements may be appropriate, if the nonzero
β’s with degree less than r, can be shown to be non-zero more easily by a lower-order
test.
If the alternate density could not be fit exactly by a combination of any finite
number of basis vectors, then m could grow without bounds, but it might grow quite
slowly if some of the later α’s are quite close to zero. In the regression case, we might
even be able to identify the proportion of times that a βj would be identified as non-
zero, based on the value of its standard deviation, the jth diagonal element in a σ2( X 'X) -1
matrix with known X ' = (1/n+1, 2/n+1, … , n/n+1) (or a suitable estimate of the variance-
covariance matrix given a weighting matrix).

138
Although the regression tests may not be equivalent to the goodness-of-fit tests,
they are more familiar to most, and it seems difficult to imagine that if one would not be
justified in going to ever higher powers, m, as the sample size increases in some cases,
there should not be a similar termination in the level of m for the goodness-of-fit test
with a particular alternate hypothesis.
If one is willing to consider only symmetric densities, one might raise the power
of tests only by considering even functions. This can be seen perhaps more easily with
a polynomial basis noting that only even-powered polynomial terms are necessary to fit
other even functions.
Of course, in general, we often do not know what alternatives that we would like
to guard against, which is the general rationale for an omnibus test. If there are a few
alternatives, one could assign a prior belief of potential alternatives. For example, one
might want to test a null of a Student-t distribution when you have a 65% concern that
the alternative might be symmetric stable, a 20% concern that the alternative might be
from a generalized error distribution, and a 10% concern that the distribution might be a
symmetric leptokurtic mixture of two normal distributions. The remaining 5% might be
spread over other possibilities. While not much might be able to be calculated for the
non-specified 5% likely distributions, one might be able to identify, given n, some ex
ante estimates of power for different levels of m for the different specified alternatives
and find the m that gives the highest weighted average power value.
The prior distribution of beliefs is perhaps outside the realm of mathematics,
statistics, or econometrics and idiosyncratic to the researcher, although it might be
influenced by previous works and experience. However, it should still be possible

139
given a set of beliefs to identify a particular test prior to applying it and, thus, not
prejudice the conclusions of the test.

140
CHAPTER 10
CONCLUSION
General purpose Lagrange multiplier goodness-of-fit tests can be used with
economic and financial data to probe the distribution underlying the generation of the
data. Some parsimonious parametric distributions may be found that will aid inferences
about levels of and relationships between economic variables. Thus, asymptotically
consistent estimates of parameters are possible without either presuming normality of
error terms or using solely nonparametric techniques. In that regard, these new
procedures can offer new answers to old questions.
Unlike many goodness-of-fit tests, unknown model parameters can be estimated
with the tests presented herein without prejudicing the tests. Since these tests rely on
maximum likelihood techniques, they asymptotically meet the conditions of the
Neyman-Pearson lemma against any simple alternative hypothesis in its parameter
space. Tests with one-sided alternatives that meet these criteria qualify as Uniformly
Most Powerful (UMP) tests for arbitrary significance levels.48
Spline models are more tractable than polynomial models with existing double
precision software, and it does not appear that that this tractability is obtained at the cost
of lower power in tests of interest.
48 Uniformly Most Powerful (UMP) tests generally do not exist for two-sided alternatives or nested null hypotheses, though tests based on selecting portions of critical regions from UMP tests are often cited as quite desirable.

141
An illustration with model parameters was presented for illustration of test
properties and contrasted with some common goodness-of-fit tests. Rejection of the
hypothesis of normal error terms was accomplished with the new tests but not with the
old tests.
Further study is necessary to determine advantageous strategies in increasing
power of the tests against particular alternatives. Uneven knot points and better
estimation of Fisher information matrices are two such areas.
An argument that is often used in favor of OLS even without any presumption of
Gaussian errors is consistency; however, since practitioners’ samples always have a
finite number of observations, without small sample studies, an argument that
essentially says the estimates would be unbiased if we had an infinite sample size may
be specious.
Another argument is the assumption of finite variance; somehow many believe
that is less restricting than using some parametric error distribution based on some
theoretical rationale. Certainly the samples always have finite empirical variance, but
that is not much support for this assumption.
We will likely never know the truth with certainty about any distribution in our
lifetime. There simply will never be enough observations in any sample, especially
without the model changing; however, it might be that we can get a bit closer by having
estimates that just might possibly be more efficient. At a minimum, it could not hurt to
look at things both ways: nonparametrically and through the prism of likely parametric
errors.

142
APPENDIX A
DENSITIES AND DISTRIBUTIONS Throughout this study, some non-standard distributions are used. In this
appendix, some of the less well-known and understood distributions are described.
A.1. STABLE DISTRIBUTIONS
Stable distributions are those that have the property of being stable under
addition. The distribution of the sum of any number of independent random variables
that are from stable distributions will itself be stable. The logarithm of the
characteristic function of each stable random variable shares the same form.49
Specifying the four-vector of parameters, (α,β,γ,δ), can identify a particular stable
distribution. Delta (δ) is a location parameter and can, in a crude sense, be compared to
some measure of average (mean, median, or mode), but formally is not any one of these
measures; it can take on any real number as its value. Gamma (γ) is a scale parameter,
and can be likened somewhat to a variance, standard deviation, or range; it can take on
any non-negative number with a γ of zero indicating a degenerate distribution. Beta (β)
is a skewness index and can take on values between plus or minus one, inclusively;
when β > 0 (< 0), the distribution is skewed to the right (left); when β = 0, the
distribution is symmetric. In the empirical examples in this study, we consider 49 See McCulloch (1996)

143
symmetric stable distributions for ease of calculation, but with faster, accessible
estimates of non-symmetric distributions, this restriction need not apply. Alpha (α) is
called the exponent and can take on values on the range (0,2]. When α = 2, this is the
special case of the normal distribution, the only stable distribution which has a finite
second moment. In such cases, the two parameters of the normal distribution equate to
the stable parameters as follows: μ = δ and σ2 = 2γ2. The parameter β has no effect on
the distribution when α = 2. When α ∈ (1,2), the mean of the distribution is δ; when α
∈ (0,1], the mean of the distribution does not exist. The Cauchy distribution is a special
case of the stable class of distributions and has β = 0 and α = 1. The density of stable
distributions is not known to have a closed form except in the case of the Normal,
Cauchy, and Lévy50, so the use of these distributions requires numerical applications
such as are present at http://economics.sbs.ohio-state.edu/jhm/jhm.html, and
http://academic2.american.edu/~jpnolan the home pages of J. Huston McCulloch and
John P. Nolan, respectively.
A.2. PARETO DISTRIBUTIONS
This distribution is named after Vilfredo Pareto who, among other things,
studied income distributions. The density for a Pareto random variable is
( )( )1 10 1
ppy yg yy
− +⎧ ≥⎪= ⎨<⎪⎩
where p is a positive parameter. This is a decaying function
which decays slower as its parameter p increases. To shift the function so that it has
50 Stable parameters of (½,1,1,0), ( )( ) ( )3 2
1exp ,
2 2f x x
xx
γ γδ
π δδ= − >
−−
⎡ ⎤⎢ ⎥⎣ ⎦
and 0 otherwise.

144
positive density from zero to infinity, employ a change of variable with x = y – 1, or
equivalently y = x + 1. Then we can have a “shifted Pareto” density
( ) ( ) ( )11 00 0
pp x xf xx
− +⎧⎪ + ≥= ⎨<⎪⎩
. The associated distribution function is
( ) ( )1 1 00 0
px xF xx
−⎧⎪ − + ≥= ⎨<⎪⎩
. The Pareto distribution function is of use in this study as
a “squashing” function in numerical quadrature in mapping the infinite real line into a
unit interval. Employing a change of variable technique, we can define zx = z(x) = F(x).
Then, at the endpoints of the positive half-infinite interval, the transformations become
z0 = F (0) = 0 and z∞ = F (+∞) = 1. Since we generally wish to integrate over the
interval from -∞ to ∞, when we are dealing with symmetrical functions, we can simply
double the results of any integration with this shifted Pareto “squashing” function,
rather than being concerned with the details in a change of variable to the negative half-
infinite interval and reducing the constant coefficient by ½ ,
However, if f (x) is not symmetric, then we can use the double shifted Pareto
density:
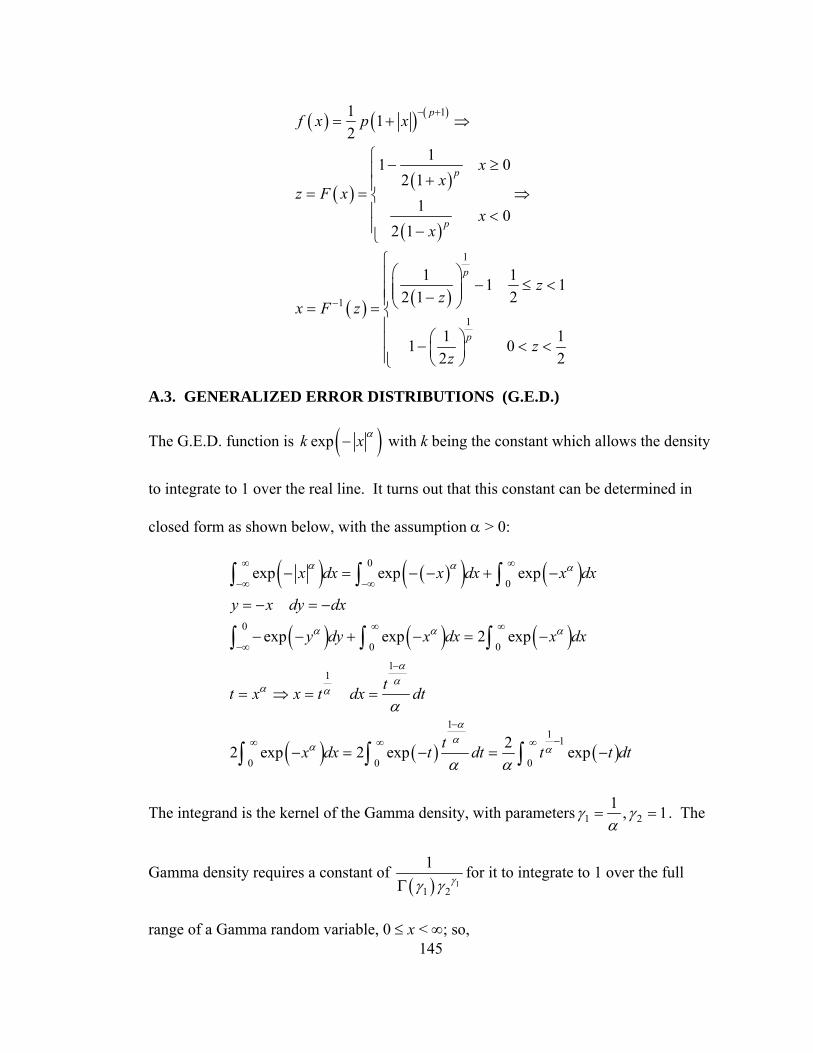
145
( ) ( ) ( )
( )( )
( )
( ) ( )
1
1
1
1
1 12
11 02 1
1 02 1
1 11 12 1 2
1 11 02 2
p
p
p
p
p
f x p x
xx
z F xx
x
zz
x F z
zz
− +
−
= + ⇒
⎧ − ≥⎪ +⎪= = ⇒⎨⎪ <⎪ −⎩
⎧⎛ ⎞⎪ − ≤ <⎜ ⎟⎪⎜ ⎟−⎪⎝ ⎠= = ⎨
⎪⎛ ⎞⎪ − < <⎜ ⎟⎪ ⎝ ⎠⎩
A.3. GENERALIZED ERROR DISTRIBUTIONS (G.E.D.)
The G.E.D. function is ( )expk x α− with k being the constant which allows the density
to integrate to 1 over the real line. It turns out that this constant can be determined in
closed form as shown below, with the assumption α > 0:
( ) ( )( ) ( )
( ) ( ) ( )
( ) ( ) ( )
0
0
0
0 0
11
11 1
0 0 0
exp exp exp
exp exp 2 exp
22 exp 2 exp exp
x dx x dx x dx
y x dy dx
y dy x dx x dx
tt x x t dx dt
tx dx t dt t t dt
α α α
α α α
αα
α α
αα
α α
α
α α
∞ ∞
−∞ −∞
∞ ∞
−∞
−
−
−∞ ∞ ∞
− = − − + −
= − = −
− − + − = −
= ⇒ = =
− = − = −
∫ ∫ ∫
∫ ∫ ∫
∫ ∫ ∫
The integrand is the kernel of the Gamma density, with parameters 1 21 , 1γ γα
= = . The
Gamma density requires a constant of ( ) 1
1 2
1γγ γΓ
for it to integrate to 1 over the full
range of a Gamma random variable, 0 ≤ x < ∞; so,

146
( )1 11
0
2 2 1exp 1t t dtα αα α α
−∞ ⎛ ⎞− = Γ ⎜ ⎟⎝ ⎠∫ . Thus, using the reciprocal of this constant, we get
the G.E.D. density of ( )exp12
x αα
α
−⎛ ⎞Γ ⎜ ⎟⎝ ⎠
. For the Gaussian distribution, α = 2 and σ2
= ½, the constant reduces to the familiar 1π
. For the double exponential, with σ = 1,
the constant is ½. Exponents (α’s) that are less than 2 produce leptokurtic densities.
Exponents greater than 2 generate platykurtic densities. In the limit as α→∞, the
G.E.D. approaches a uniform distribution over [-1,1].
Various GED densities
0
0.1
0.2
0.3
0.4
0.5
0.6
-4 -3 -2 -1 0 1 2 3 4
Value of Variable
Den
sity
a = 500a = 6a = 3a = 2a = 1.5a = 1a = .5
Figure A.1. Various GED densities. The letter “a” represents the exponent “α.”

147
We can introduce a scale factor for the G.E.D. by dividing the density and
argument of the function by some c > 0 to produce exp12
xcc
αα
α
⎛ ⎞−⎜ ⎟⎜ ⎟⎛ ⎞ ⎝ ⎠Γ ⎜ ⎟
⎝ ⎠
.
A.4. STUDENT-T DISTRIBUTIONS51
These distributions are well-known but it comes as a surprise to many that there
are two ways to generalize the distribution taught in many elementary statistics classes:
(1) a scale parameter can be introduced by dividing the density and argument by some
c > 0 just as we did above in the G.E.D., and (2) that the parameter r below which
represents the degrees of freedom can take on any non-integer positive value while the
function retains its properties as a density. Thus we have a generalized Student-t
distribution: ( )1
2 2
2
12 1 , 0, 0,
2
r
h t
rt r c t
r rcc rπ
+−⎛ ⎞⎜ ⎟ ⎛ ⎞⎝ ⎠= ⎜ ⎟⎜ ⎟⎛ ⎞ ⎝ ⎠⎜ ⎟
⎝ ⎠
+Γ+ > > − ∞ < < ∞
Γ. In
general, the kth moment of a Student-t distribution does not exist if r ≤ k. When r = 1,
we have a special case in which the Student-t distribution is the Cauchy distribution
( ) ( )211 ,h t
tt
π=
+− ∞ < < ∞ , and also is a stable distribution with α = 1.
51 Since William Sealy Gossett published under a pseudonym, “Student” is a proper noun and thus is capitalized throughout this document. Gossett worked for the Guinness Brewing Company of Dublin, Ireland. Company policy forbade its employees from publication due to a master brewer previously publishing part of a brewing process that was a Guinness company secret.

148
A.5. MIXTURE OF TWO GAUSSIANS. The density for a random variable from a
mixture of k normal densities is:
( )2
22
21 1with 1.
2
j
j
zk k
jj
j jj
pe p
μ
σ
πσ
−−
= =
⎡ ⎤⎢ ⎥
=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
∑ ∑ The mixture of
normals distribution is difficult to work with; it can have different values of k and
requires estimation of many variables with several constraints to assure identification.
Deriving maximum likelihood estimates in closed form is a tedious venture since the
standard method of first taking logarithms is more challenging due to the summation
within the product. For a mixture of two normals, and a random sample of size n, the
first order conditions follow:
Define
( )2
22
2
1
2
i j
j
z
ijj
e
μ
σφπσ
−−
≡ and let 2
1i j ij
jpψ φ
=
≡ ∑ .
Then, the first order necessary conditions are:
1 2
1
ln 0n set
i i
ii
Lp
φ φψ=
−∂= =
∂ ∑ ;( )
21
ln 0n setj i j ij
j i j i
p zL μ φ
μ σ ψ=
−∂= =
∂ ∑ ;
( )
02
1ln
12
2
2
2
setn
i ij
j
jiijj
j
zp
L=
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −−−
=∂∂ ∑
= ψσ
σμ
φ
σ.
In making inferences concerning the mixture of two normals distribution, it is helpful to
know its overall mean and variance. By analyzing its density, given earlier, and
substituting p for p1 and (1 – p) for p2 it can be seen that the mixture’s moment
generating function (MGF) can be derived directly from its parent distribution’s MGF:

149
( )2 21 2
1 22 2( ) 1t tt ttZE e p e p eσ σμ μ+ +
= + − .
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 211222
2111 101 μμσμσμ ppMetpetptM −+=⇒+−++= •••
( ) ( )[ ] ( ) ( ) ( )[ ] ( ) ⇒++−+++= ••• etpetptM 2222
22
2211
212 1 σμσσμσ
( ) [ ] ( )[ ]22
22
21
212 10 μσμσ +−++= ppM .
Var(Z) = M2(0) – [M1(0)]2 = pσ12 + (1-p)σ2
2 + p(1-p) (μ1 - μ2)2
The single dots in the exponential indicate the first exponent in the first line with
the parameters μ1 and σ12, while the double dots indicate the second exponent in the
first line with the parameters μ2 and σ22.
The mean is not surprising and could certainly have been inferred without
MGF’s. The determination of the variance is a little more opaque, but has the desired
result that it is positively correlated with the absolute difference in the means and gets
larger as p approaches ½.
Careful attention is required for identification of parameters. As p approaches
zero or one, either (μ1,σ12) or (μ2,σ2
2) ceases to have impact and ceases to be identified.
To help in the identification process, it is necessary to specify some set of
conditions like {p ≤ ½; if p = 0, (μ1,σ12) = (0,1); 52 if p = ½, then σ1
2 ≤ σ22; if p = ½
and σ12 = σ2
2, then μ1 < μ2}.
A symmetric mixture of two normals can result from μ1 = μ2, or from p = ½ and
σ12 = σ2
2. In this study, since we are dealing with symmetric errors, we set μ1 = μ2 = 0.
52 Since this will be a normal distribution and (μ1,σ12) will have no impact.

150
A.6. CAUCHY DISTRIBUTION AND ITS USE IN INTEGRATION OVER THE INFINITE REAL LINE. The Cauchy distribution and density functions are
( )( )
2
1
1( ) arctan .5
1( )1
tan cot2
C x x
c xx
C z z z
π
π
ππ π−
= +
=+
⎛ ⎞= − = −⎜ ⎟⎝ ⎠
In this study when we wish to numerically integrate some function on the real line, we
can use the Cauchy function or a shifted Pareto function, depending on the tail size
required, as a “squashing” function to concentrate the area under the curve on the unit
interval. Thus, for some function f(x), we can evaluate ( )I f x dx∞
−∞= ∫ via a
transformation of variables. For example, using the Cauchy function, we can transform
x to z as follows:
( ) ( )( ) ( )
( ) ( )( )
( )( )
( )( )( )( )( )
1
1
1
11
10
: 0; 11 1 1
z C x x C z
Note C Cdxdz dz dx c x c C z
dzdxc C z
f C zf x dx dz
c C z
−
−
−
−∞
−−∞
= ⇒ =
−∞ = ∞ =
= = = ⇒
= ⇒
=∫ ∫
151
APPENDIX B
1-1 CORRESPONDENCE BETWEEN A GENERAL DISTRIBUTION AND A UNIFORM OVER [0,1]
For any ε i drawn from the distribution, there exists a u ∈ [0,1] such that ε i =
F-1(u). 53 Let u be distributed according to some unknown function Ξ. (Note for later
use that F-1(u) is not defined for values outside [0,1].)
Pr(ε i ≤ z) = F(z) (*)
Pr(ε i ≤ z) = Pr(F-1(u) ≤ z) = Pr[F(F-1(u)) ≤ F(z)]54 = Pr (u ≤ F(z))
Pr (u ≤ F(z)) = Ξ(F(z)), by definition.
This implies Ξ(F(z)) = F(z), from (*).
Substituting v for F(z), we have Ξ(v) = v. So, ξ(v) = Ξ′(v) = 1. Thus, ξ is a
uniform density over [0,1] and Ξ is the uniform distribution function over the same
range.
53This is a bit informal, since not all distribution functions are strictly invertible. F is non-decreasing so it is invertible except in regions where the density is zero. However, in such regions, there will be no ε i for which we will require F-1. 54 Since F is a non-decreasing function.
152
APPENDIX C
PSEUDO-RANDOM NUMBER GENERATOR AND MONTE CARLO METHODS
C.1. RANDOM NUMBER GENERATOR. For Monte Carlo simulations in this
study, the Kiss+Monster algorithm, developed by George Marsaglia in 2000, was used
exclusively. It produces random integers between 0 and 4,294,967,295 (232-1) and has
a period of 108859. It is a fast recur-with-carry generator of dimension 920. According
to Aptech, the distributors of GAUSS programming language, it seems to pass all of the
Diehard tests for random number generators for “small” samples of billions of random
numbers from its sequence. Recur-with-carry generators often have poor performance
on some of these tests, but since any practical application of using this generator will
use essentially 0% of the sequence, these problems are masked (or at least not yet found
to occur) in samples.
Recur-with-carry generators determine their next value as a function of a linear
combination of a predetermined previous number of values.
1
1int mod
k
i n iki
n i n ii
a xx a x b
b
−=
−=
⎡ ⎤⎛ ⎞⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟= +⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟
⎝ ⎠⎣ ⎦
∑∑

153
“Recur” refers to the dependence of a new number in the sequence on the
previous k values; “carry” relates to the second term in the brackets, the number of
times that a multiple of b would be “carried” to the next digit if we were evaluating the
sum in base b arithmetic. For the KISS + Monster, k, the dimension, is 920, though in
GAUSS, the state variable has dimension of 500.
This type of generator is to be contrasted with a linear congruent random
number generator of the form [ ]1 modn nx ax c b−= + . Linear congruent RNGs suffer
from having a period of at most b – 1 before repeating. Since the largest integer
representation is often 232 without manipulation, simple linear congruent RNGs can
generate at most 4,294,967,295 values without beginning to recycle.
It appears that KISS + Monster is more than satisfactory to avoid any repetition
for this and most other studies. To give an extreme example of how impossible it is to
describe the size of its period, imagine packing the present-day universe completely full
with super computers the size of atoms and having them generate random numbers at
incredible speeds of a trillion times a trillion numbers per second. Since there is quite a
bit of space in the universe which is not full of atoms, this means there would be many
more computers in this example than there are atoms in the universe. Ignoring the
coordination problem (and just about any other practical matter!), if these computers
had been running non-stop since the beginning of time, they would have generated
about 10152 random numbers (using the diameter of an atom as 1 Angstrom, the
diameter of the universe as 100 billion light years, the age of the universe as 13.7 billion
years, and pretending that both the atoms and the universe were spherical).

154
With the period of the Kiss+Monster random number generator being 108859, it
is fairly difficult to come up with a thought experiment that would allow one to make a
complete cycle through all of the generator's random numbers. This gives a different
meaning to the idea of infinity and, at least based on cycle length, suggests the
Kiss+Monster algorithm seems to be sufficient for random number generation.
C.2. CALCULATION OF EMPIRICAL QUANTILES
Most texts and methodologies suggest using empirical percentiles of
distributions derived by Monte Carlo simulation as estimates of theoretical
distributions. For example, if you wish to form a symmetric 90% confidence interval
from 1000 simulations, perform the repetitions, order the statistics and use the 50th
smallest statistic as the lower confidence bound. Symmetry would suggest the 50th
largest statistic x[50] as the upper confidence bound. This introduces a bit of an
inconsistency. If we wish to estimate the theoretical pth percentile, we use p/100 × S,
where S is the number of simulations. So, to approximate the theoretical 5th percentile
we find 0.05 × S, where S is the number of simulations. If we want to estimate the
theoretical 95th percentile and take 0.95 × S, we get the 51st largest order statistic x[950],
not the 50th largest x[951]. If we do use x[951], we are using 0.951 × S, which seems
inconsistent with the formula for the index of the lower confidence bound.
The problem here is using percentiles of the empirical distribution as estimators
for the percentiles of the underlying theoretical distribution. The percentile of an
empirical distribution is rarely an unbiased estimate for the percentile of theoretical
distribution. If one has a sample of 10 from a uniform distribution, u1,…, u10 and forms
order statistics, y1,…, y10, then E(y1) = 1/11, not 1/10. A direct consequence of this is

155
that if one wishes to find an unbiased estimate of the theoretical upper 5% cutoff of a
non-uniform unknown distribution with 1000 replications, one should use a weighted
average of y950 and y951. If the density is uniform in the area of this cutoff, then linear
interpolation would allow the use of .05 y950+.95 y951. Without the uniform density
presumption, it is not possible to determine whether linear interpolation is appropriate.
However, if one used 999 replications, one could confidently simply use y950 as an
unbiased estimate of the theoretical upper 5% cutoff of the non-uniform unknown
distribution, with no interpolation needed. Applications in the programs that produced
Monte Carlo simulations use a different percentile procedure than what is generally
available in GAUSS. Since the proc55 name "percentile" is already taken for the
methodology that is most often employed, the new proc that is used is immodestly
named "percyntile." Hence, percentiles used in this study are based on p% × (S+1),
rather than p% × S.
C.3. ADDITION OF 2-33 TO PSEUDO-RANDOM NUMBERS
Many random number generators have an algorithm to generate random integers
between 0 and 2k - 1, inclusively, for some integer value of k. Then, if random fractions
distributed uniformly on the unit interval are desired, the chosen random integers are
divided by 2k, which allows for random numbers between 0 and 1 – 2-k. With GAUSS
software, k = 32, so I will use that number in the foregoing.
It is a simple task to determine that the expected value of the pseudo-random
numbers generated throughout a complete cycle through the pseudo-random numbers:
k/2 × (0 + 1 – 2-k) / k = ½ - 2-(k – 1). In addition to being slightly biased, the pseudo- 55 “proc” is a term used in GAUSS for a series of statements that can be called by the main program frequently. Synonyms for this may be “macro” or “subroutine.”

156
uniform random variable has an expectation that is about 1.16415 × 10-10 too low, the
use of inverse distribution functions has trouble with zero as an argument. Since this
condition must be avoided in a program and the addition actually makes the “uniform”
numbers unbiased, it seems prudent to simply add 2-33 to each generated pseudo-random
number up front.
157
APPENDIX D
STARTING VALUES FOR ITERATIVE MAXIMUM LIKELIHOOD ESTIMATION
D.1. INITIAL ESTIMATES FOR PARAMETERS FOR USE IN MAXIMUM
LIKELIHOOD ESTIMATION. With non-Gaussian error terms, ordinary least
squares regressions are still consistent but no longer efficient methods of estimating
coefficients. So, non-standard methods can be employed under the assumption of
stable, generalized Student-t, generalized error (GED), or normal-mixture distributions.
This study focuses on the symmetric sub-class of such distributions.
With symmetric stable errors, SMSTRG, a symmetric stable regression program
(McCulloch, 1998) can be used to calculate maximum likelihood errors. For each of the
classes of errors, additional programs, similar in nature to SMSTRG, have been
developed based on the derivations shown below.
For each class of errors, initial estimates of model parameters are determined by
using trimmed least squares using the interquartile range of observations as follows.
First, residuals are determined using OLS and ordered. Then, observations with
residuals that are in the first and fourth quartiles are temporarily thrown out, and a
second set of OLS “trimmed” estimators of parameters is calculated using only the
158
observations with second and third quartile residuals. Finally, new residuals are
calculated for all observations using the trimmed model parameter estimates.
With leptokurtic errors, observations with extreme errors should be given
considerably less weight than is implicitly credited to them with OLS. The idea with
using trimmed estimates as starting values is not to have the most efficient weights but
to have easily-calculated starting values for the model parameters to use in the
maximum likelihood search.
In addition to having initial estimates for the model parameters, it is necessary to
estimate initial error distribution parameters. One way, which is employed for the
generalized Student-t and GED errors, is to use method-of-moments estimators for
initial values. With the generalized Student-t distribution, with r (not necessarily
integer) degrees of freedom, and scale parameter c,
12 2
2
12 1 , 0, 0,
2
rrt r c t
r rcc rπ
+−⎛ ⎞⎜ ⎟ ⎛ ⎞⎝ ⎠ ⎜ ⎟⎜ ⎟⎛ ⎞ ⎝ ⎠⎜ ⎟
⎝ ⎠
+Γ+ > > − ∞ < < ∞
Γ ,
( ) ( ) ( )
22
22
122
1, and 21 2
r rc rc rE t r E t r
r rπ
− ⎛ ⎞⎛ ⎞⎜ ⎟⎜ ⎟
⎝ ⎠⎝ ⎠
−Γ= > = >
Γ − −
With r ≤ 1, the first moment does not exist and, with r ≤ 2, the second moment
does not exist. Sample moments always exist, so equating sample moments with
population moments will necessarily require that the initial estimate for r will be greater
than 2. However, parameters under the maximum likelihood estimation search will not
have this constraint so smaller values of r can still be estimated.

159
If sample moments are denoted as M1 and M2, we can eliminate c by equating
the sample and population ratios of the first moment with the square root of the second
moment: ( )
22
1
2
12 22
1
r r rM
rM π
− ⎛ ⎞⎛ ⎞⎜ ⎟⎜ ⎟
⎝ ⎠⎝ ⎠
−Γ −=
Γ −. This is a monotonically increasing
function of r with r > 2, illustrated below, which approaches the limit 2π
≈
0.7978845608 as r → ∞. So, there is an inverse function of the moment ratio which
will allow for an initial estimate for r. The function is relatively flat for r > 6. If the
moment ratio is by chance greater than the limiting value some high starting value such
as r̂ =100 can be chosen.

160
Initial Estimate of Degrees of Freedom
0
0.25
0.5
0.75
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Degrees of Freedom
Rat
io o
f Mom
ents
Ratio
Asymp.
Figure D.1. Degrees of Freedom vs. Ratio of Moments in a Student-t distribution Apparent kinks in the above graph are related to the precision of the addressing of
pixels in the graphing software and not due to the function itself.
Once an estimate for r is determined, we can estimate c by equating the 2nd
population moment with the 2nd sample moment: ( )2 ˆ 2
ˆˆ
M rc
r−
= .
Some may find it improper to use a method-of-moments estimator for a
distribution which may not have moments. Although, requiring an initial starting value
for degrees of freedom greater than 2 does not prevent future maximum likelihood
iteration estimates to be greater than 2, it happened that if one started with an initial

161
estimate for degrees of freedom that is too high, the starting scale parameter was often
many orders of magnitude too high so as to compensate for the degrees of freedom
parameter.
So, alternatively, a quantile estimator can be used, following the approach of
McCulloch for stable distributions. For the Student cdf, Td(x), with d degrees of
freedom, one can calculate the function ( ))75(.)95(.
)25(.)75(.)05(.)95(.
1
1
11
11
−
−
−−
−−
=−
−=
d
d
dd
dd
TT
TTTT
df . The
ratio is invariant with respect to the scale parameter. The quantile estimator of d is
⎟⎟⎠
⎞⎜⎜⎝
⎛−−
= −
25.75.
05.95.1ˆxxxx
fd , where xp is the (100 × p) percentile of the sample distribution.
Subsequently, an estimate for the scale parameter can be determined from a function of
d̂ : ( )
.75 .25ˆˆ
x xcg d
−= with ( ) )75(.2)25(.)75(. 111 −−− =−= ddd TTTdg .
The recommendation adopted for this study was to use the quantile estimator
whenever the moment estimator suggested degrees of freedom under 3. Some limited
simulation studies show that the moment estimator has a lower mean squared error for
degrees of freedom higher than 3, but much higher for degrees of freedom less than 3.
An alternate methodology which has not been explored is to recognize that the method-
of-moments estimators are biased and to map the moment estimator to a different scale
based on sample size; for example, if the scale suggested 2.1 degrees of freedom with
100 observations, one might reasonably conclude that the starting degrees of freedom
could be some lower number like 1. However, it is important to remember to keep this
methodology as simple as possible, since these are only starting values and that more

162
efficient parameter estimates will be obtained through the subsequent maximum
likelihood estimation.
Using a similar approach, GED errors are distributed according to:
exp , 0, 0,12
x c xcc
αα α
α
⎛ ⎞⎜ ⎟⎜ ⎟⎛ ⎞ ⎝ ⎠⎜ ⎟
⎝ ⎠
− > > − ∞ < < ∞Γ
Then, ( ) ( )2
2
2 3
and1 1
c cE x E xα α
α α
⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
Γ Γ= =
Γ Γ. Employing the same equating of
sample and population ratios as with the Student-t problem, we again eliminate c:
1
2
2
3 1MM
α
α α
⎛ ⎞⎜ ⎟⎝ ⎠
⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
Γ=
Γ Γ, which is a monotonic function increasing in α, illustrated
below, which approaches the limit 32
≈ 0.8660254038 as α → ∞. So, there is an
inverse function of the moment ratio which will allow for an initial estimate for α. The
function is relatively flat for α > 6. If the moment ratio is by chance greater than the
limiting value some high starting value such as α̂ =20 can be chosen:

163
Initial Estimate of Alpha
0
0.25
0.5
0.75
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Alpha
Rat
io o
f Mom
ents
Ratio
Asymp.
Figure D.2. Power vs. Ratio of Moments in a GED distribution
We can then use one of the two moment equations to estimate c; e.g., 1
1ˆˆ2ˆ
c M α
α
⎛ ⎞⎜ ⎟⎝ ⎠⎛ ⎞⎜ ⎟⎝ ⎠
Γ=
Γ.
With a mixture of two normals, there are three parameters to be estimated rather
than two; consequently, three sample moments are necessary. It would seem that using
a method similar to that developed for the other error distributions would be quite a bit
more complicated. Amazingly, after some not-too-apparent algebraic manipulation,
there is actually a closed-form solution which does not even require any exotic
functional estimation!
The error distribution is according to:

164
2 2
2 22 21 21 2
1exp exp 0 1,2 22 2
p x p x p xσ σπσ πσ
⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
−− + − ≤ ≤ − ∞ < < ∞
Equating the first 3 population absolute56 moments to sample moments yields:
( )
( )
( )
1 1 2
2 22 1 2
3 33 1 2
2 1
1
8 1
M p p
M p p
M p p
σ σπσ σ
σ σπ
⎡ ⎤⎣ ⎦
⎡ ⎤⎣ ⎦
= + −
= + −
= + −
One can eliminate p by using the first 2 equations: 21 2
2 22 2
1 2 1 2
2M Mp
π σ σσ σ σ σ
− −= =− −
With no obvious insight, the following functions of moments allow for p(1 - p) to be
isolated from functions of the sigmas in 2 equations:
( ) ( )
( ) ( ) ( )
222 1 2 1
23 1 2 2 1 2 1
12
18 2
M M p p
M M M p p
π σ σ
π π σ σ σ σ
− = − −
− = − + −⇒
( )1 2 32 12
1 2
22 2
M M MM M
π σ σπ
− = +−
This last expression can be solved for σ1 in terms of σ2 and used in the equation
above representing dual expressions for p to obtain a quadratic equation in terms of σ2.
The two solutions represent the interchangeability of σ1 with σ2 which depends on
whether p is chosen to be less than or greater than ½.
56 The first and third theoretical moments are zero, so we alternatively equate E[|x|] and E[|x3|] with M1 and M3.

165
Explicit estimates for the parameters follow (if 1 2ˆ ˆσ σ≠ ):
( ) ( ) ( ) ( )2 2 21 2 3 1 2 3 2 1 3 1 2
2 21 2
1 2 31 22
1 2
1 2
1 2
2 2 2 4 22 2ˆ
2 42ˆ ˆ
2 2
ˆ2ˆ
ˆ ˆ
M M M M M M M M M M M
M MM M MM M
Mp
π π π πσ
ππσ σ
ππ σ
σ σ
− ± − − − −=
−
−= −−
−=
−
The knife-edge case ( 1 2ˆ ˆσ σ= ) is a case equivalent to a Gaussian distribution (a
single normal distribution rather than a mixture of two) and can be thought of either
as p̂ being indeterminate between 0 and 1, exclusively, or p̂ being 1, 1σ̂ being
estimated by 2M and 2σ̂ being indeterminately nonnegative (or p̂ being 0, 2σ̂ being
estimated by 2M and 1σ̂ being indeterminately nonnegative).57
If the equations above do not yield legitimate values for the parameters, I would
choose starting values as follows:
2 21 2
31ˆ ˆ ˆ, ,2 2 2
M Mp σ σ= = =
57 To identify the estimate, one can impose the requirement that one of the following three sets of conditions hold: (1) 1 2ˆ ˆσ σ< , (2) 1 2ˆ 1, ˆ ˆ1, 1p σ σ= < = , or (3) 1 2ˆ 0, ˆ ˆ1, 1p σ σ= = > .

166
APPENDIX E
INVARIANCE OF LM STATISTIC WITH RESPECT TO LINEAR TRANSFORMATIONS OR EXPONENTIATION
The Lagrange multiplier statistic is invariant with respect to a linear change of
basis functions. In addition, the statistic is also invariant with respect to an
exponentiation of the basis functions.
First consider the ordinary alternative hypothesis:
( ) ( ) ( ) ( )1
01
1 1 , 0m
j j jj
g z z z z dzφ α φ α φ φ=
′= + = + =∑ ∫ ,
where the non-indexed α and φ are vectors. ( )zφ is a basis that spans a space of smooth
functions. We will restrict ourselves to a basis with orthonormal functions. Forα ∈ Α ,
where A is a convex subspace of ℜm that includes the origin as an interior point, we
have ( ) 0,g z zφ ≥ ∀ . So ( )g zφ is a density whenα ∈ Α .
The likelihood function of interest is:
Lφ(α;x) = 1
( ; )n
ii
g xφ α=
∏ ⇒ Λφ (α;x) = ( )1
log ;n
ii
g xφ α=∑ = ( )
1 1log 1
n m
j j ii j
xα φ= =
⎛ ⎞+⎜ ⎟⎜ ⎟
⎝ ⎠∑ ∑ ,
where Λφ is the logarithm of the likelihood function. The jth first derivative, evaluated
at α = 0, is:

167
( )
( )( )
1 10
1 0
log
1
n nj i
j imj i i
k k ik
xLx
x
φ
α
α
φφ
αα φ= ==
= =
∂= =
∂+
∑ ∑∑
,
so the transpose of the “score” vector of first derivatives, evaluated at α = 0, for the LM
Statistic is:
( ) ( ) ( )11 1
0 , ,n n
i m ii i
s x xφ φ φ= =
⎛ ⎞′ = ⎜ ⎟
⎝ ⎠∑ ∑K
A typical element of the Hessian matrix is:
( ) ( )
( )
2
21
11
n j i j i
mij jk k i
k
x x
x
φ φ φα α
α φ
′
=′
=
−∂ Λ
∂ ∂ ⎡ ⎤⎢ ⎥⎣ ⎦
= ∑+∑
,
so a typical element of the Fisher information matrix, evaluated at the null hypothesis,
for the LM statistic is:
( ) ( ) ( )
( )( ) ( )
2
, 0 0 021 1
1
log0
1
n nj i j i
j j j i j imj j i i
k k ik
x xLI E E E x x
x
φφ α α α
φ φφ φ
α αα φ
′′ ′= = =
′ = =
=
⎧ ⎫⎪ ⎪
⎛ ⎞ −∂ ⎡ ⎤⎪ ⎪= − = − =⎜ ⎟ ⎨ ⎬ ⎢ ⎥⎜ ⎟∂ ∂ ⎡ ⎤ ⎣ ⎦⎪ ⎪⎝ ⎠ +⎢ ⎥⎪ ⎪
⎣ ⎦⎩ ⎭
∑ ∑∑
= ( ) ( ) ( ) ( ) ( ) ( ) ( )1 1
0 00 01 1
;n n
j i j i j i j i i i j ji i
E x x x x g x dx n z z dzα αφ φ φ φ α φ φ′ ′ ′= =
= =
⎡ ⎤ = =⎣ ⎦∑ ∑∫ ∫
The Lagrange multiplier statistic is LMφ = sφ′(0)Iφ (0)-1sφ (0). Since ( )zφ is
orthonormal, I is the identity matrix multiplied by the scalar n; so, the LM statistic
reduces to 1/n sφ′(0)sφ (0).

168
Selecting an alternative basis, ( ) ( )* z M zφ φ= where M is nonsingular and
deterministic, we get ( ) ( )** *
11 1
, ,n n
i m ii i
s x xφ φ φ= =
⎛ ⎞′ = ⎜ ⎟
⎝ ⎠∑ ∑K or *s Msφφ = .
The information matrix with respect to the alternative basis:
( ) ( )
( ) ( )
*
*
1 * *0
1
01 1 1 1
I n z z dz
n M z z M dz MI M
I M I M
φ
φ
φφ
φ φ
φ φ− − − −
′=
′ ′ ′= =
′=
∫
∫
The Lagrange multiplier statistic with respect to the alternative basis is
( ) ( ) ( )* * * *1 1 1 1 1LM LMs I s s M M I M Ms s I sφ φ φ φ φ φ φφ φ φ φ
− − − − −′ ′ ′ ′ ′= = = =
Now, let us turn our attention to an exponentiated form for our alternative
density:
( )( )
( )
( )
( )
1
1 1 10 0
g z z
e g z z
e eg ze dz e dz
φ
φ
α φ
α φ
′+
′+= =
∫ ∫
The denominator is a constant necessary for the density to integrate to unity, which we
can call Cφ (α). The attractiveness of this choice of function is that ge is a density for all
α ∈ ℜm, rather than just a subset of ℜm.
The likelihood function of interest is:
Le(α;x) = 1
( ; )n
e ii
g x α=
∏ ⇒ Λe (α;x) =
( )1
log ;n
e ii
g x α=∑ = ( ) ( )
1 11 log
n m
j j ii j
x n Cα φ α= =
⎛ ⎞+ −⎜ ⎟⎜ ⎟
⎝ ⎠∑ ∑ ,
Thus, a typical element of the score is:

169
( ) ( ) ( )( )
( )
( )
1
1
11
0
11 1 1 1
0
1 log
m
j jj
m
j jj
zn m n j
j j i j izj i j i
z e dzx n C x n
e dz
α φ
α φ
φα φ α φ
α
=
=
+
+= = =
∑⎡ ⎤⎛ ⎞∂
+ − = −⎢ ⎥⎜ ⎟⎜ ⎟∂ ⎢ ⎥ ∑⎝ ⎠⎣ ⎦
∫∑ ∑ ∑∫
Evaluated at α = 0, this becomes:
( )( )
( )1
0
1 1
n njj i j i
i i
e z dzx n x
e
φφ φ
= =
− =∫∑ ∑ ,
since the integral of each basis function over the unit interval is zero. A typical element
of the Hessian is:
( ) ( ) ( )( )
( )
( )
1
1
11
0
11 1 1 1
0
1 log
m
j jj
m
j jj
zn m n j
j j i j izj j ji j i
z e dzx n C x n
e dz
α φ
α φ
φα φ α φ
α α α
=
=
+
+′ ′= = =
⎡ ⎤∑⎢ ⎥⎡ ⎤⎛ ⎞∂ ∂ ⎢ ⎥+ − = −⎢ ⎥⎜ ⎟ ⎢ ⎥⎜ ⎟∂ ∂ ∂⎢ ⎥ ∑⎝ ⎠⎣ ⎦ ⎢ ⎥⎢ ⎥⎣ ⎦
∫∑ ∑ ∑∫
( ) ( ) ( )( )
( )( )
( )( )
( )
1 1 11 1 11 1 1
0 0 0
2
m m m
j j j j j jj j j
z z z
j j j jC z z e dz z e dz z e dz
nC
α φ α φ α φ
α φ φ φ φ
α
= = =+ + +
′ ′
⎡ ⎤⎛ ⎞ ⎛ ⎞∑ ∑ ∑⎢ ⎥⎜ ⎟ ⎜ ⎟−⎢ ⎥⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥⎝ ⎠ ⎝ ⎠= − ⎢ ⎥⎡ ⎤⎢ ⎥⎣ ⎦
⎢ ⎥⎢ ⎥⎣ ⎦
∫ ∫ ∫
The information matrix is the expected value of the Hessian. Here we evaluate the
Information matrix at α = 0.
( ) ( )1
11
, 0 0
0
;
m
j jj
e jjeI H z dzC
α φ
α
α
αα
=+
′ =
=
⎡ ⎤∑⎢ ⎥⎢ ⎥⎡ ⎤ = −⎣ ⎦ ⎢ ⎥⎢ ⎥⎣ ⎦
∫

170
( ) ( ) ( )( ) ( )( )( ) ( )
1 1 12 210 0 0
2 0
j j j j
j j
e z z dz e z dz z dzn n z z dz
e
φ φ φ φφ φ
′ ′
′
⎡ ⎤−⎢ ⎥= =⎢ ⎥
⎢ ⎥⎣ ⎦
∫ ∫ ∫∫
So, the information and score evaluated at the null hypothesis and, hence, also the
Lagrange multiplier statistic, are equivalent whether or not the basis is exponentiated.
LMe = LMφ
This suggests that the convex subset of ℜm on which the vector α and a regular
basis forms legitimate densities is an isomorphism of the entire space ℜm, the set on
which α and an exponentiated basis forms densities. In this isomorphism, α = 0, which
is an interior point for regular bases corresponds to α = 0, the center of ℜm, for
exponentiated bases. Thus, in one sense, the null hypothesis can be thought to be in a
“central region” of the space of alternative hypotheses, with alternatives available in
any direction.

171
APPENDIX F
UNCONDITIONAL CALCULATION OF σ2
Rather than use pseudo-random numbers for Monte Carlo simulation, for some
purposes it is better to use a different scheme of deterministic numbers to draw from the
joint distribution of p-tuples of σ2’s. So-called quasi-random numbers are better suited
for the purpose of estimating σ1 in Chapter 8, because they are ex-post more equally
distributed throughout the domain over which we will be integrating. Because of that,
an average of the summation of n properly-chosen evaluations of a function will
converge to the expected value of the function asymptotically at a quicker rate than
Monte Carlo simulation.58
F.1. QUASI-RANDOM NUMBERS
Figure F.1 shows comparisons of quasi-random numbers with pseudo-random
numbers. Each set has 150 members. The pseudo-random numbers were generated by
Excel’s random number generator, whereas the quasi-random numbers are functions 58 In some literature, Monte Carlo methods of multi-dimensional integration are claimed to have convergence rates that are superior to deterministic methods by appealing to stochastic properties and independence of successive draws. One actually can verify empirically that Monte Carlo methods often work better than some deterministic methods. However, when one realizes that Monte Carlo methods that use computer algorithms as random number generators are themselves actually deterministic rather than truly random, one must reason that something besides randomness is causing the improved convergence rates. Since a string of Monte Carlo random numbers are not independent, many laws of large numbers or central limit theorems that are appealed to do not strictly apply to these sequences. Thus, if pseudo-random numbers help to produce improved convergence rates, it is reasonable to widen our search to other deterministic methodologies.

172
that fill in a unit square59 evenly by “remembering” where it has and has not already
been (the functions could also be used to populate a d-dimensional unit hyper-interval
though I would have a difficult time showing examples in a dissertation that is on a
collection of essentially 2-dimensional planes). All the examples of quasi-random
number sequences, which are not random at all, take advantage of the infinite non-
repeating representation of the fractional parts of irrational numbers.
59 The functions could also be used to populate a d-dimensional unit hyper-interval though I would have a difficult time showing examples in a dissertation that is on a collection of essentially 2-dimensional planes!

173
Sample A
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Sample B
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Sample C
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Sample D
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Sample E
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Sample F
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Sample G
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Sample H
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Figure F.1. Examples of quasi-random numbers and pseudo-random numbers over the unit square.
It is easy to see that Samples B, E, and H have a more deterministic pattern and
are thus different than typical pseudo-random numbers. These come from quasi-
random number formulae. As it turns out, Sample C is also quasi-random, but perhaps

174
has less desirable properties for integrating over the unit square. Samples A, D, F, and
G are sets of Excel pseudo-random numbers.
We define the function {kα} to be the fractional part of the number kα, or in
other words the part of the decimal expansion of kα that follows the decimal point,
including the decimal point. Then we can define the sets of numbers illustrated in
Figure F.1 to be, in (x,y) coordinates (in all cases, k = 1, 2, …, 150):
Sample B: { } { }( )5,3 kk Weyl sequence
Sample C: ( ){ } ( ){ }( )7,3 21
21 ++ kkkk Haber sequence
Sample E: { } { }( )3 23 2,2 kk Niederreiter sequence
Sample F: { } { }( )7/511/3 , keke Baker sequence
To generalize these to multiple dimensions: with Weyl, all the terms are
{kpi1/2}, where the pi, are distinct prime numbers; with Haber, again all the terms have
factors which are distinct prime numbers; with Niederreiter, the general term is
{k2j/d+1}, where j = 1, 2, …, d and d is the number of dimensions; in the Baker
sequence, the exponents of e are distinct rational numbers.
In Numerical Methods in Economics (1998), Judd states that these methods
“have not been extensively used in economic analysis or econometrics. They have,
however, received substantial attention in the financial literature, even the financial
press …”
175
These are not necessarily the best sequences to use; however, they are among
the simplest to implement. Numerical Recipes has a program that produces the so-
called Sobol sequences and there are some Fourier analytic methods that can produce
sequences that have lower integration error but involve more computation cost.
The advantage of quasi-random sequences is that they are more evenly
distributed through a unit hyper-interval than are pseudo-random sequences. This
equidistribution is an ex post property with quasi-random sequences, not simply an ex
ante expected property as it is with pseudo-random sequences. Because of this, the
convergence rate of the average of a function evaluated at a finite number of points
compared to its expected value, attainable through integration, is close to the order of
n-1, rather than the n-1/2 that would occur if pseudo-random numbers were truly random.
One function that measures the disparity between a sum and its corresponding integral
is called star-discrepancy. Consider the unit hyper-interval. In words, for our purposes,
star-discrepancy is the maximum difference between the actual and expected number of
points in any hyper-rectangle in the unit hyper-interval that has one of its vertices at the
origin. With that said, the formula is, for X = {x1, …, xn}, in d dimensions:
[ ) [ )( )[ ] ∏
=≤≤−
∩××=
d
jj
d
ttn t
NXttcard
XDd 1
1
1,,0
* ,0,0sup)(1
L
K
, where card means
“cardinality” and is the number of points in a set. The first term is the actual number of
points in the hyper-rectangle and the second is the hyper-volume of the hyper-rectangle.
So, to calculate the star-discrepancy, one must identify the single hyper-rectangle with
one vertex at the origin that has the most over- or under-representation within its hyper-
volume.

176
In the examples pictured earlier, the star discrepancies, calculated by a GAUSS
program60, are:
Pseudo-sequences Quasi-sequences
Sample A: 0.079568 Sample B: 0.026347
Sample D: 0.133363 Sample C: 0.117259
Sample F: 0.116767 Sample E: 0.033468
Sample G: 0.088959 Sample H: 0.049044
So, your eyes did not lie to you. Even though Sample C is quasi-random, its
coverage is less uniform ex post than the other quasi-random sequences, at least with
150 points.
So, how can we practically use one of these or another quasi-random sequence
in our problem?
In two dimensions, we need to transform the domain to the unit square, which
could be done via estimated distribution functions. The first one of these could be an
initial estimate of the unconditional distribution of σ2 with the second being an estimate
of the conditional distribution of σ2t | σ2
t-1. With more than 2 dimensions, we would
also need the conditional distributions of σ2t | σ2
t-1, σ2t-2, etc.
60 The program runs through (n+1) × (n+1) rectangles, with the vertex diagonal from the origin being defined by the cross product of the x-coordinates of the n points (plus the value “1”) with the y-coordinates of the n points (plus the value “1”). For each of these rectangles, it determines the proportion of points in the interior of the rectangle and also the proportion of points in the interior of an “outer rectangle”, which is calculated by multiplying the coordinates by 1 + machine epsilon or 1+ 2.220446049250313 × 10-16. Then a comparison is made between the proportions and the area of the rectangle. The absolute difference that is the largest of all those 2 × (n+1) × (n+1) comparisons is the star discrepancy. (If by chance, any x- or y-coordinates are zero, they will be counted in the proportion.)

177
For completeness, the quasi-random sequence that minimizes star-discrepancy
in one dimension, is simply {k/(n+1)}, k = 1, 2, …, n, which is the sequence which is
often the procedure used in the event of iteration being necessary in one dimension.
F.2. RULE OF THUMB FOR MAXIMAL “REASONABLE” VALUES OF σ2
Of course, the support of σ2 runs to +∞. However, if you want to have some
idea what large reasonable values are so you know over what interval you may need to
numerically compute the unconditional density in Chapter 8, first pick a small
probability, say, p = 10-6. Following, I will show an example of how to pick a number
that is on the order of the inverse distribution function at p. For my example, I will use
Gaussian errors with a GARCH(1,1) model. I will use the same notation as in the
footnote on the first page: σ2t = ω + ξ1η2
t - 1 + ζ1 σ2t – 1.
With Gaussian errors, we can use the χ2(1) function; with other errors, we will
have to use the square of the error function. In this case anyway, we know that
[χ2(1)]-1(1 – p) = [Φ-1(1 – p/2)]2.
Consider the one-in-a-million situation we are interested in. A 0.000001 event
could happen in many ways, but since we are looking for an estimate rather than an
exact value, let us consider two. For both of these let us assume that we are at a state
with the mean level of σ2; although, the values will not be much different if we are a bit
larger or smaller than the average. Now, we could get that 0.000001 event right away.
Or, it could happen that we get 2 consecutive one-in-a-thousand draws.
The first circumstance will result in the next variance being calculated as:

178
( ) ( )[ ] ( )( )11
1
1111
122
1193.231
11,1
ξζξω
ξζωζξχωσ
−−−+
=−−
+−+=− p
The second example will result in a variance being calculated, in two steps:
( ) ( )[ ] ( )( )
( ) ( )[ ] ( )( )
( ) ( )( )11
111
11
111
122
11
1
1111
122
1183.10183.10
1183.101
1,1)2(
1183.101
11,1)1(
ξζξζξω
ξζξω
ζξχωσ
ξζξω
ξζωζξχωσ
−−−++
=−−
−++−+=
−−−+
=−−
+−+=
−
−
p
pinitial
Depending on the values of the parameters, either one of these final values could be
higher than the other. I would conjecture that there is a good chance that the maximum
of the two will be higher than the cutoff value sought and certainly be near to the order
of the value at the cutoff probability, p.

179
APPENDIX G
ROUNDING CONCERNS
G.1. ROUNDING ERRORS IN POLYNOMIALS
There are two types of error of concern in the evaluation of polynomials. This
first is an error in the representation of the coefficients of the polynomial. If the
polynomial is truly p(x), let us call the computational representation of the polynomial
p*(x). If the coefficients of p*(x) are near but not exactly equal to the coefficients of
p(x), there would be coefficient representation error, even if there were no further
rounding error in evaluating the polynomial at a particular value of x. For many
polynomials, the coefficient representation error is large and pervasive for relatively
large values of x above 0.9. Additionally, unlike some other types of rounding errors,
this error is large and in the same direction for all relatively large values of x.
The polynomial evaluation error, the rounding error that occurs in the
evaluation of p(x), where p(x) = p*(x) exactly with no coefficient representation error
will also have an effect. While this error is more random, since we are interested in
calculating critical values, one can expect that these too will have some undesirable
effect on the calculation of simulated critical values.

180
For any polynomial in x, one can imagine an error function as a function of x,
based on the rounding that occurs at each calculation. This function will be somewhat
periodic if one assumes that x itself also contributes to the error. For example, if x can
only be represented to 13 hexadecimal digits, there will be a tiny period of 16-13 where
the error introduced by x peaks and falls.
However, there is a more significant event happening in the calculation of the
Neyman basis. It was assumed that one could calculate as many basis functions as one
would like; however, since the number of digits in some of the coefficients grow rather
quickly while other coefficients remain equal to 1, we will see some significant
calculation errors when we go about using the polynomials in rounded form unless all
the coefficients are such that they can be represented in 16-digit hexadecimal form.
The recursion formula is ( ) ( ) ( ) ( ) ( )11
2 1 2 11n n
nn y f y nf y
f yn
−+
+ − −=
+with
f0(y) = 1 and f1(y) = 2y – 1.
As it turns out many of the coefficients that have only 17-digits can actually be
represented with zero rounding error. This is not immediately clear from the recursion
formula but a look at the coefficients shows that they are evenly divisible by several
numbers. If some of these numbers are powers of two, exact representation is possible
even with a large degree of digits. In base 10, 1,000,000 can be represented exactly
with two significant digits but 301 cannot.
However, if we look at the 25th basis function, we will see that it contains,
among others, the following terms:

181
-34117964696719800 y22 + 87835611240491400y21-168415237204594380 y20
+249504055117917600y19-292438194472624200 y18+275435973863750700y17-
210584646684190350 y16+131486998905250560y15-67237669894730400 y14
All these terms have from 17 to 18 digits and not all of them can be represented
with no rounding error in double precision hexadecimal floating point notation.
The actual representation of the coefficients is:
-34117964696719799 y22 + 87835611240491396y21-168415237204594380 y20
+249504055117917600y19-292438194472624192 y18+275435973863750719y17-
210584646684190350 y16+131486998905250560y15-67237669894730398 y14
This leaves a systematic difference of: y22 - 4y21 + 8y18 + 19y17+ 2y14.
This function takes on a maximum value of 26 at one and is pictured on the next
page. In the calculation of the LM statistic, this systematic error function will hit an
element of the inverse of the Fisher information matrix which equals 2m + 1, or, in this
case, 51, before again being multiplied by the error function.
What is worse is that the calculation of the 26th basis function is based on the
rounded coefficients of the 25th, so the errors will multiply quite quickly.
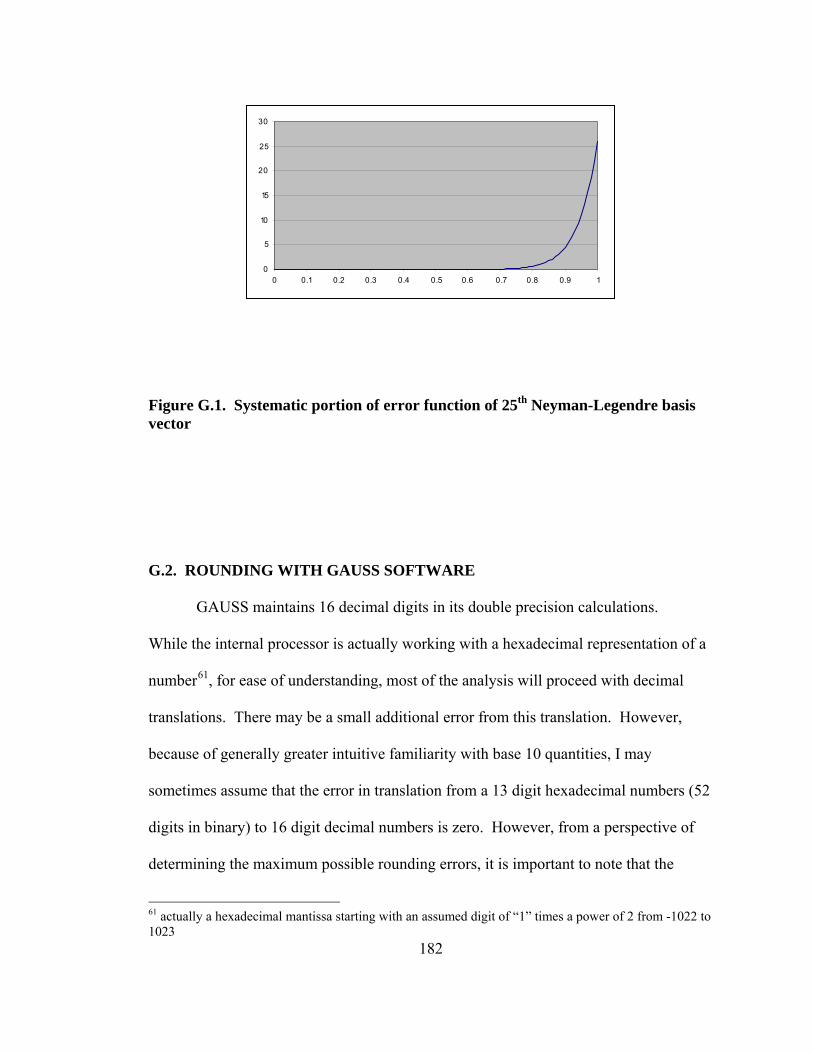
182
0
5
10
15
20
25
30
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Figure G.1. Systematic portion of error function of 25th Neyman-Legendre basis vector
G.2. ROUNDING WITH GAUSS SOFTWARE
GAUSS maintains 16 decimal digits in its double precision calculations.
While the internal processor is actually working with a hexadecimal representation of a
number61, for ease of understanding, most of the analysis will proceed with decimal
translations. There may be a small additional error from this translation. However,
because of generally greater intuitive familiarity with base 10 quantities, I may
sometimes assume that the error in translation from a 13 digit hexadecimal numbers (52
digits in binary) to 16 digit decimal numbers is zero. However, from a perspective of
determining the maximum possible rounding errors, it is important to note that the
61 actually a hexadecimal mantissa starting with an assumed digit of “1” times a power of 2 from -1022 to 1023
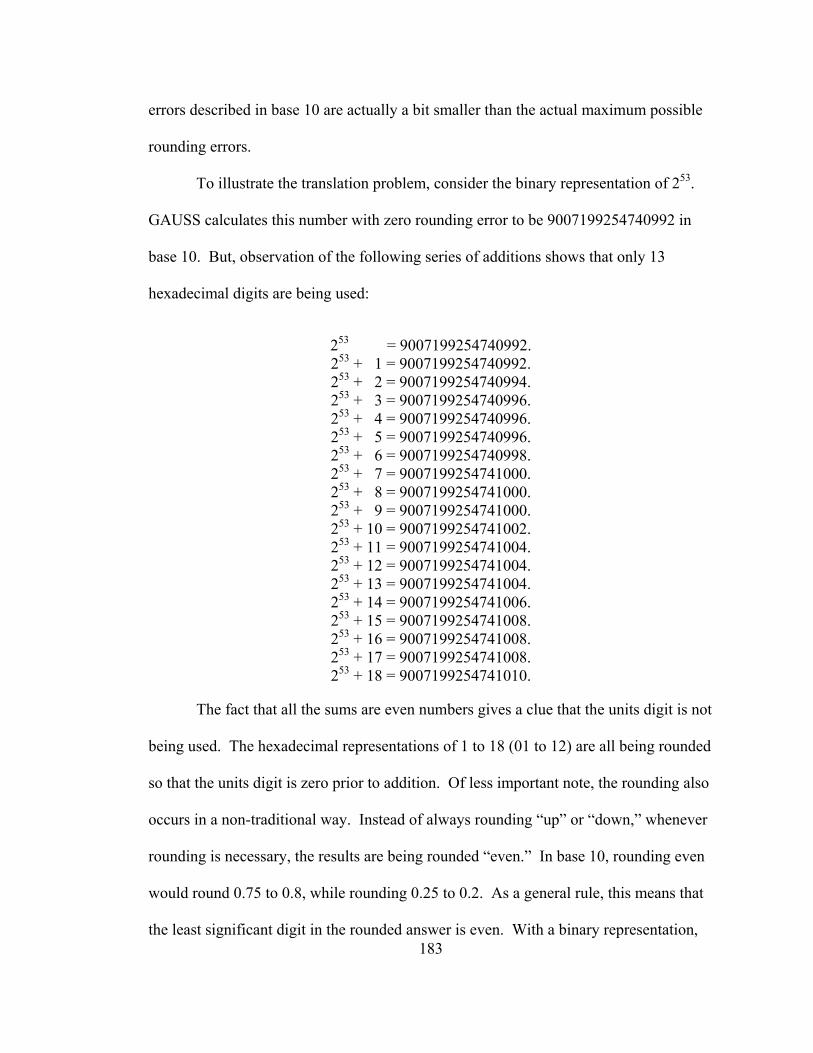
183
errors described in base 10 are actually a bit smaller than the actual maximum possible
rounding errors.
To illustrate the translation problem, consider the binary representation of 253.
GAUSS calculates this number with zero rounding error to be 9007199254740992 in
base 10. But, observation of the following series of additions shows that only 13
hexadecimal digits are being used:
253 = 9007199254740992. 253 + 1 = 9007199254740992. 253 + 2 = 9007199254740994. 253 + 3 = 9007199254740996. 253 + 4 = 9007199254740996. 253 + 5 = 9007199254740996. 253 + 6 = 9007199254740998. 253 + 7 = 9007199254741000. 253 + 8 = 9007199254741000. 253 + 9 = 9007199254741000. 253 + 10 = 9007199254741002. 253 + 11 = 9007199254741004. 253 + 12 = 9007199254741004. 253 + 13 = 9007199254741004. 253 + 14 = 9007199254741006. 253 + 15 = 9007199254741008. 253 + 16 = 9007199254741008. 253 + 17 = 9007199254741008. 253 + 18 = 9007199254741010.
The fact that all the sums are even numbers gives a clue that the units digit is not
being used. The hexadecimal representations of 1 to 18 (01 to 12) are all being rounded
so that the units digit is zero prior to addition. Of less important note, the rounding also
occurs in a non-traditional way. Instead of always rounding “up” or “down,” whenever
rounding is necessary, the results are being rounded “even.” In base 10, rounding even
would round 0.75 to 0.8, while rounding 0.25 to 0.2. As a general rule, this means that
the least significant digit in the rounded answer is even. With a binary representation,

184
“rounding even” amounts to always finding the closest representation such that the least
significant digit is zero, since the only even digit in base 2 is zero, or rounding to the
nearest multiple of four. In hexadecimal, rounding even means rounding the least
significant digit to 2, 4, 6, 8, A, C, or E.
The number 253 (a one followed by 53 zeros in binary, a two followed by 13
zeros in hexadecimal) can be represented exactly correctly in hexadecimal floating
point with only 13 hexadecimal digits in the mantissa since it can be represented as a 1,
which is always assumed, followed by 13 hexadecimal digits (after the “decimal” point)
times 2 raised to the 53rd power (using an exponent of 53). An exponent of 53 signifies
that the mantissa is to be multiplied by 253.
However, the number 253+1 cannot be represented exactly correctly as a 13-digit
hexadecimal floating point number; it would be 1.00000000000008 × 253. Focusing on
the last digit, we see that this represents 8 × 16-14 × 253 = 1. However, the last digit, “8,”
is in the 14th place so it must be dropped. The choices are for 253+1 to be represented
either as 1.0000000000000 × 253 or 1.0000000000001 × 253, so the answer can be
represented as 253 plus either 0 × 16-13 × 253 = 0 or 1 × 16-13 × 253 = 2.
Note that there is no corresponding problem with subtraction at this level. For
example, 253 – 1 can be represented with 13 hexadecimal digits as 1.fffffffffffff × 252.
One can see that this hexadecimal representation is 1 × 16-13 × 252 (= 1) less than
2 × 252 (= 253), so it is 253 - 1, with no rounding error.

185
253 - 1 = 9007199254740991. 253 - 2 = 9007199254740990. 253 - 3 = 9007199254740989. 253 - 4 = 9007199254740988. 253 - 5 = 9007199254740987. 253 - 6 = 9007199254740986.
So, whereas one would normally assume that with 16 decimal digit
representations of numbers between zero and one, maximum rounding errors in the
mantissa would normally be ± 5 × 10-17, the previous illustration shows several
instances in which the maximum error is twice as large or ± 1 × 10-16, due to the binary
consideration. Since 2-53 ≈ 1.110223 × 10-16, the maximum error can actually be a bit
(no pun intended) larger. It is actually approximately 2.220446 times larger; for exact
calculations, this factor is 516/236.
G.3. EVALUATION OF POLYNOMIALS BY HORNER’S RULE
To reduce error in the evaluation of polynomials, Horner’s rule is employed.
However, using p(x) = ((…(anx + an-1)x + an-2)x + … a1)x + a0 with rounded coefficients
still involves a significant number of opportunities for rounding error. Unfortunately,
when a number of additions are involved there is no convenient bound on the relative
error of the computed sum from the algebraic sum as some examples will illustrate.
With orthogonal polynomials even employing integer arithmetic, the number of digits in
the coefficients grows quite rapidly leading to unsystematic errors. In calculating LM
statistics, we must sum many of these values containing errors. Since they tend to
offset, if the errors are uniform we can expect the error to grow only at ( )errorN E or

186
( )max error2
N E. However, since we are trying to calculate empirical percentiles of
LM statistics, we will be looking at the 95th or 99th percentiles which will generally
contain the calculations with the highest errors if rounding error is significant relative to
the size of the statistic.
Note: the critical value of the chi-square statistic that we are interested in is
often on the order of 101 to 102. For the Neyman polynomials, when some of the
coefficients reach the order of 1016, it is easy to have several different instances of
errors of 1 (100) for just a single calculation in a single polynomial because, with double
precision, the difference 1016 – 100 is often determined by the software to be equal to
1016, which is different from the actual answer by 1. Higher order Neyman polynomials
are characterized by large differences in magnitude between the coefficients as can be
seen in Appendix H. If some of the coefficients reach even higher orders of 10, the
errors will increase by that higher order. Of course in calculation of the statistic, a
quadratic form, such errors will be magnified even more by squaring them. We will
also have such errors with the spline calculations, but, as can be seen in Appendix H,
there is not as great a difference in magnitude between the coefficients so the rounding
errors will be much less apparent until much higher order bases are encountered.

187
APPENDIX H
NEYMAN AND SPLINE BASES
In this appendix are evaluations of the basis vectors for the Neyman-Legendre
polynomials and the three splines: Linear, Quadratic and Cubic. The polynomials are
presented first followed by the splines, which are ordered by degree, first linear, then
quadratic, then cubic. The key to reading them follows:
Neyman-Legendre bases are listed for the first 24 polynomials. The first
number is the polynomial number. This is followed by the coefficients of the
polynomial. For example, the fifth basis polynomial is:
252 x5 – 630 x4 + 560 x3 – 210 x2 + 30 x – 1
These polynomials are characterized by alternating signs and always end in a
constant of ±1. Each of the lower order polynomials are contained in higher level bases.
The basis with 5 polynomials the 5th polynomial plus each of the first four listed
polynomials.
Linear spline bases are represented by m sets of five coefficients, one set for
each basis vector. The five coefficients for each vector can be divided into groups of
two, two, and one. The first two are the coefficients of a line over a segment of the unit
interval. The next two are the coefficients of another line that is over a segment of the

188
unit that is just to the right of the first segment. The last coefficient is a negative
number, which is a constant function defined over the remainder of the unit interval.
The two linear equations and the constant are designed to be continuous and to integrate
to zero over the unit interval. One other convention is that the basis vectors are only
defined on the unit interval (or could be thought of as equal to zero outside the unit
interval).
For example the third linear spline basis is characterized by Linear basis 3.000
1.000 -0.1111 -1.000 0.5556 -0.1111 1.000 -0.4444 -1.000 0.8889 -0.1111 1.000 -0.7222 -1.000 1.278 -0.05556
This is translated as these three linear splines:
( )0
1 10
9 35 1 29 3 3
1otherwise
9
x x
x x xφ
− ≤ ≤
= − + ≤ ≤
−
⎧⎪⎪⎪⎨⎪⎪⎪⎩
, ( )1
4 1 29 3 38 2
19 3
1otherwise
9
x x
x x xφ
− ≤ ≤
= − + ≤ ≤
−
⎧⎪⎪⎪⎨⎪⎪⎪⎩
, ( )2
otherwise
13 2 118 31
18
xx
xφ
−=
−
⎧ ≤ ≤⎪⎪⎨⎪⎪⎩
Note that each spline is continuous so the double definition at the knots do not
pose a problem. The indices of φ run from 0 to 2 rather than 1 to 3 due to the definition
in Chapter 2. The first segment of each linear spline begins at the ith segment; thus φ0
begins at x = 0, φ1 begins at x = 1/3, and φ2 begins at x = 2/3. With more basis vectors
the unit interval is divided into more sections. The second linear segment in the last
basis vector, which represents 23 4 is over the range 118 3
x x− + ≤ ≤ , which is outside the

189
unit interval and is thus ignorable. It is represented above by lighter color type; the last
row of each linear spline basis has an ignorable linear equation.
Quadratic and cubic splines are similarly represented. Each quadratic spline is
made up of 3 piecewise quadratic equations, defined over three segments of the unit
interval with each quadratic equation determined by 3 coefficients. There is also a
trailing constant function which is defined over the remainder of the unit interval.
Quadratic basis 2.000 1.000 1.000 0.04167 -2.000 1.000 0.04167 1.000 -2.000 0.7917 -0.2083 1.000 0.0000 -0.2083 -2.000 3.000 -0.9583 1.000 -3.000 2.042 -0.2083 1.000 -1.000 0.2083 -2.000 5.000 -2.792 1.000 -4.000 3.958 -0.04167 There are more ignorable coefficients in the quadratic spline representations as
discussed in Chapter 2. The basis above represents three quadratic splines as follows:
( )2
12
1 12 024 2
19 12 124 2
x x xx
x x xφ−
⎧− + + ≤ ≤⎪⎪= ⎨⎪ − + ≤ ≤⎪⎩
, ( )2
02
5 1024 2
23 12 3 124 2
x xx
x x xφ
⎧ − ≤ ≤⎪⎪= ⎨⎪− + − ≤ ≤⎪⎩
, and
( )12
1 1024 2
5 1 124 2
xx
x x xφ
⎧ − ≤ ≤⎪⎪= ⎨⎪ − + ≤ ≤⎪⎩
φ-1 begins at x = -1/2, which is why the first quadratic in the first line is ignorable, φ0
begins at x = 0, φ1 begins at x = 1/2, which is why the last two quadratics in the third
row are ignorable.
Rather than repeat this logic for the cubic spline representation, the reader is
referred to the general definition given in Chapter 2.
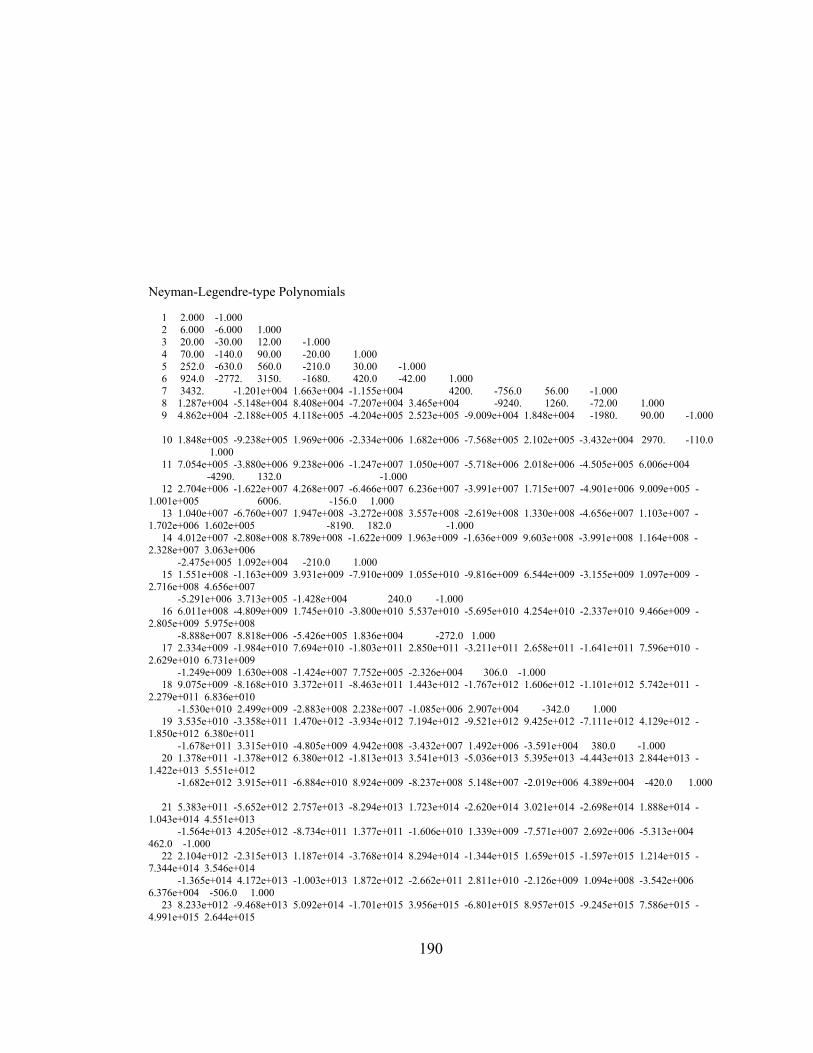
190
Neyman-Legendre-type Polynomials 1 2.000 -1.000 2 6.000 -6.000 1.000 3 20.00 -30.00 12.00 -1.000 4 70.00 -140.0 90.00 -20.00 1.000 5 252.0 -630.0 560.0 -210.0 30.00 -1.000 6 924.0 -2772. 3150. -1680. 420.0 -42.00 1.000 7 3432. -1.201e+004 1.663e+004 -1.155e+004 4200. -756.0 56.00 -1.000 8 1.287e+004 -5.148e+004 8.408e+004 -7.207e+004 3.465e+004 -9240. 1260. -72.00 1.000 9 4.862e+004 -2.188e+005 4.118e+005 -4.204e+005 2.523e+005 -9.009e+004 1.848e+004 -1980. 90.00 -1.000 10 1.848e+005 -9.238e+005 1.969e+006 -2.334e+006 1.682e+006 -7.568e+005 2.102e+005 -3.432e+004 2970. -110.0 1.000 11 7.054e+005 -3.880e+006 9.238e+006 -1.247e+007 1.050e+007 -5.718e+006 2.018e+006 -4.505e+005 6.006e+004 -4290. 132.0 -1.000 12 2.704e+006 -1.622e+007 4.268e+007 -6.466e+007 6.236e+007 -3.991e+007 1.715e+007 -4.901e+006 9.009e+005 -1.001e+005 6006. -156.0 1.000 13 1.040e+007 -6.760e+007 1.947e+008 -3.272e+008 3.557e+008 -2.619e+008 1.330e+008 -4.656e+007 1.103e+007 -1.702e+006 1.602e+005 -8190. 182.0 -1.000 14 4.012e+007 -2.808e+008 8.789e+008 -1.622e+009 1.963e+009 -1.636e+009 9.603e+008 -3.991e+008 1.164e+008 -2.328e+007 3.063e+006 -2.475e+005 1.092e+004 -210.0 1.000 15 1.551e+008 -1.163e+009 3.931e+009 -7.910e+009 1.055e+010 -9.816e+009 6.544e+009 -3.155e+009 1.097e+009 -2.716e+008 4.656e+007 -5.291e+006 3.713e+005 -1.428e+004 240.0 -1.000 16 6.011e+008 -4.809e+009 1.745e+010 -3.800e+010 5.537e+010 -5.695e+010 4.254e+010 -2.337e+010 9.466e+009 -2.805e+009 5.975e+008 -8.888e+007 8.818e+006 -5.426e+005 1.836e+004 -272.0 1.000 17 2.334e+009 -1.984e+010 7.694e+010 -1.803e+011 2.850e+011 -3.211e+011 2.658e+011 -1.641e+011 7.596e+010 -2.629e+010 6.731e+009 -1.249e+009 1.630e+008 -1.424e+007 7.752e+005 -2.326e+004 306.0 -1.000 18 9.075e+009 -8.168e+010 3.372e+011 -8.463e+011 1.443e+012 -1.767e+012 1.606e+012 -1.101e+012 5.742e+011 -2.279e+011 6.836e+010 -1.530e+010 2.499e+009 -2.883e+008 2.238e+007 -1.085e+006 2.907e+004 -342.0 1.000 19 3.535e+010 -3.358e+011 1.470e+012 -3.934e+012 7.194e+012 -9.521e+012 9.425e+012 -7.111e+012 4.129e+012 -1.850e+012 6.380e+011 -1.678e+011 3.315e+010 -4.805e+009 4.942e+008 -3.432e+007 1.492e+006 -3.591e+004 380.0 -1.000 20 1.378e+011 -1.378e+012 6.380e+012 -1.813e+013 3.541e+013 -5.036e+013 5.395e+013 -4.443e+013 2.844e+013 -1.422e+013 5.551e+012 -1.682e+012 3.915e+011 -6.884e+010 8.924e+009 -8.237e+008 5.148e+007 -2.019e+006 4.389e+004 -420.0 1.000 21 5.383e+011 -5.652e+012 2.757e+013 -8.294e+013 1.723e+014 -2.620e+014 3.021e+014 -2.698e+014 1.888e+014 -1.043e+014 4.551e+013 -1.564e+013 4.205e+012 -8.734e+011 1.377e+011 -1.606e+010 1.339e+009 -7.571e+007 2.692e+006 -5.313e+004 462.0 -1.000 22 2.104e+012 -2.315e+013 1.187e+014 -3.768e+014 8.294e+014 -1.344e+015 1.659e+015 -1.597e+015 1.214e+015 -7.344e+014 3.546e+014 -1.365e+014 4.172e+013 -1.003e+013 1.872e+012 -2.662e+011 2.811e+010 -2.126e+009 1.094e+008 -3.542e+006 6.376e+004 -506.0 1.000 23 8.233e+012 -9.468e+013 5.092e+014 -1.701e+015 3.956e+015 -6.801e+015 8.957e+015 -9.245e+015 7.586e+015 -4.991e+015 2.644e+015
191
-1.128e+015 3.868e+014 -1.059e+014 2.292e+013 -3.868e+012 4.991e+011 -4.795e+010 3.307e+009 -1.554e+008 4.605e+006 -7.590e+004 552.0 -1.000 24 3.225e+013 -3.870e+014 2.178e+015 -7.638e+015 1.871e+016 -3.402e+016 4.761e+016 -5.246e+016 4.623e+016 -3.287e+016 1.896e+016 -8.892e+015 3.385e+015 -1.041e+015 2.572e+014 -5.043e+013 7.736e+012 -9.101e+011 7.992e+010 -5.048e+009 2.176e+008 -5.920e+006 8.970e+004 -600.0 1.000 Splines: Linear basis 1.000 1.000 -0.5000 -1.000 1.500 -0.5000 Linear basis 2.000 1.000 -0.2500 -1.000 0.7500 -0.2500 1.000 -0.6250 -1.000 1.375 -0.1250 Linear basis 3.000 1.000 -0.1111 -1.000 0.5556 -0.1111 1.000 -0.4444 -1.000 0.8889 -0.1111 1.000 -0.7222 -1.000 1.278 -0.05556 Linear basis 4.000 1.000 -0.06250 -1.000 0.4375 -0.06250 1.000 -0.3125 -1.000 0.6875 -0.06250 1.000 -0.5625 -1.000 0.9375 -0.06250 1.000 -0.7813 -1.000 1.219 -0.03125 Linear basis 5.000 1.000 -0.04000 -1.000 0.3600 -0.04000 1.000 -0.2400 -1.000 0.5600 -0.04000 1.000 -0.4400 -1.000 0.7600 -0.04000 1.000 -0.6400 -1.000 0.9600 -0.04000 1.000 -0.8200 -1.000 1.180 -0.02000 Linear basis 6.000 1.000 -0.02778 -1.000 0.3056 -0.02778 1.000 -0.1944 -1.000 0.4722 -0.02778 1.000 -0.3611 -1.000 0.6389 -0.02778 1.000 -0.5278 -1.000 0.8056 -0.02778 1.000 -0.6944 -1.000 0.9722 -0.02778 1.000 -0.8472 -1.000 1.153 -0.01389 Linear basis 7.000 1.000 -0.02041 -1.000 0.2653 -0.02041 1.000 -0.1633 -1.000 0.4082 -0.02041 1.000 -0.3061 -1.000 0.5510 -0.02041 1.000 -0.4490 -1.000 0.6939 -0.02041 1.000 -0.5918 -1.000 0.8367 -0.02041 1.000 -0.7347 -1.000 0.9796 -0.02041 1.000 -0.8673 -1.000 1.133 -0.01020 Linear basis 8.000 1.000 -0.01563 -1.000 0.2344 -0.01563 1.000 -0.1406 -1.000 0.3594 -0.01563 1.000 -0.2656 -1.000 0.4844 -0.01563 1.000 -0.3906 -1.000 0.6094 -0.01563 1.000 -0.5156 -1.000 0.7344 -0.01563 1.000 -0.6406 -1.000 0.8594 -0.01563

192
1.000 -0.7656 -1.000 0.9844 -0.01563 1.000 -0.8828 -1.000 1.117 -0.007813 Linear basis 9.000 1.000 -0.01235 -1.000 0.2099 -0.01235 1.000 -0.1235 -1.000 0.3210 -0.01235 1.000 -0.2346 -1.000 0.4321 -0.01235 1.000 -0.3457 -1.000 0.5432 -0.01235 1.000 -0.4568 -1.000 0.6543 -0.01235 1.000 -0.5679 -1.000 0.7654 -0.01235 1.000 -0.6790 -1.000 0.8765 -0.01235 1.000 -0.7901 -1.000 0.9877 -0.01235 1.000 -0.8951 -1.000 1.105 -0.006173 Linear basis 10.00 1.000 -0.01000 -1.000 0.1900 -0.01000 1.000 -0.1100 -1.000 0.2900 -0.01000 1.000 -0.2100 -1.000 0.3900 -0.01000 1.000 -0.3100 -1.000 0.4900 -0.01000 1.000 -0.4100 -1.000 0.5900 -0.01000 1.000 -0.5100 -1.000 0.6900 -0.01000 1.000 -0.6100 -1.000 0.7900 -0.01000 1.000 -0.7100 -1.000 0.8900 -0.01000 1.000 -0.8100 -1.000 0.9900 -0.01000 1.000 -0.9050 -1.000 1.095 -0.005000 Linear basis 11.00 1.000 -0.008264 -1.000 0.1736 -0.008264 1.000 -0.09917 -1.000 0.2645 -0.008264 1.000 -0.1901 -1.000 0.3554 -0.008264 1.000 -0.2810 -1.000 0.4463 -0.008264 1.000 -0.3719 -1.000 0.5372 -0.008264 1.000 -0.4628 -1.000 0.6281 -0.008264 1.000 -0.5537 -1.000 0.7190 -0.008264 1.000 -0.6446 -1.000 0.8099 -0.008264 1.000 -0.7355 -1.000 0.9008 -0.008264 1.000 -0.8264 -1.000 0.9917 -0.008264 1.000 -0.9132 -1.000 1.087 -0.004132 Linear basis 12.00 1.000 -0.006944 -1.000 0.1597 -0.006944 1.000 -0.09028 -1.000 0.2431 -0.006944 1.000 -0.1736 -1.000 0.3264 -0.006944 1.000 -0.2569 -1.000 0.4097 -0.006944 1.000 -0.3403 -1.000 0.4931 -0.006944 1.000 -0.4236 -1.000 0.5764 -0.006944 1.000 -0.5069 -1.000 0.6597 -0.006944 1.000 -0.5903 -1.000 0.7431 -0.006944 1.000 -0.6736 -1.000 0.8264 -0.006944 1.000 -0.7569 -1.000 0.9097 -0.006944 1.000 -0.8403 -1.000 0.9931 -0.006944 1.000 -0.9201 -1.000 1.080 -0.003472 Linear basis 13.00 1.000 -0.005917 -1.000 0.1479 -0.005917 1.000 -0.08284 -1.000 0.2249 -0.005917 1.000 -0.1598 -1.000 0.3018 -0.005917 1.000 -0.2367 -1.000 0.3787 -0.005917 1.000 -0.3136 -1.000 0.4556 -0.005917 1.000 -0.3905 -1.000 0.5325 -0.005917 1.000 -0.4675 -1.000 0.6095 -0.005917 1.000 -0.5444 -1.000 0.6864 -0.005917 1.000 -0.6213 -1.000 0.7633 -0.005917

193
1.000 -0.6982 -1.000 0.8402 -0.005917 1.000 -0.7751 -1.000 0.9172 -0.005917 1.000 -0.8521 -1.000 0.9941 -0.005917 1.000 -0.9260 -1.000 1.074 -0.002959 Linear basis 14.00 1.000 -0.005102 -1.000 0.1378 -0.005102 1.000 -0.07653 -1.000 0.2092 -0.005102 1.000 -0.1480 -1.000 0.2806 -0.005102 1.000 -0.2194 -1.000 0.3520 -0.005102 1.000 -0.2908 -1.000 0.4235 -0.005102 1.000 -0.3622 -1.000 0.4949 -0.005102 1.000 -0.4337 -1.000 0.5663 -0.005102 1.000 -0.5051 -1.000 0.6378 -0.005102 1.000 -0.5765 -1.000 0.7092 -0.005102 1.000 -0.6480 -1.000 0.7806 -0.005102 1.000 -0.7194 -1.000 0.8520 -0.005102 1.000 -0.7908 -1.000 0.9235 -0.005102 1.000 -0.8622 -1.000 0.9949 -0.005102 1.000 -0.9311 -1.000 1.069 -0.002551 Linear basis 15.00 1.000 -0.004444 -1.000 0.1289 -0.004444 1.000 -0.07111 -1.000 0.1956 -0.004444 1.000 -0.1378 -1.000 0.2622 -0.004444 1.000 -0.2044 -1.000 0.3289 -0.004444 1.000 -0.2711 -1.000 0.3956 -0.004444 1.000 -0.3378 -1.000 0.4622 -0.004444 1.000 -0.4044 -1.000 0.5289 -0.004444 1.000 -0.4711 -1.000 0.5956 -0.004444 1.000 -0.5378 -1.000 0.6622 -0.004444 1.000 -0.6044 -1.000 0.7289 -0.004444 1.000 -0.6711 -1.000 0.7956 -0.004444 1.000 -0.7378 -1.000 0.8622 -0.004444 1.000 -0.8044 -1.000 0.9289 -0.004444 1.000 -0.8711 -1.000 0.9956 -0.004444 1.000 -0.9356 -1.000 1.064 -0.002222 Linear basis 16.00 1.000 -0.003906 -1.000 0.1211 -0.003906 1.000 -0.06641 -1.000 0.1836 -0.003906 1.000 -0.1289 -1.000 0.2461 -0.003906 1.000 -0.1914 -1.000 0.3086 -0.003906 1.000 -0.2539 -1.000 0.3711 -0.003906 1.000 -0.3164 -1.000 0.4336 -0.003906 1.000 -0.3789 -1.000 0.4961 -0.003906 1.000 -0.4414 -1.000 0.5586 -0.003906 1.000 -0.5039 -1.000 0.6211 -0.003906 1.000 -0.5664 -1.000 0.6836 -0.003906 1.000 -0.6289 -1.000 0.7461 -0.003906 1.000 -0.6914 -1.000 0.8086 -0.003906 1.000 -0.7539 -1.000 0.8711 -0.003906 1.000 -0.8164 -1.000 0.9336 -0.003906 1.000 -0.8789 -1.000 0.9961 -0.003906 1.000 -0.9395 -1.000 1.061 -0.001953 Linear basis 17.00 1.000 -0.003460 -1.000 0.1142 -0.003460 1.000 -0.06228 -1.000 0.1730 -0.003460 1.000 -0.1211 -1.000 0.2318 -0.003460 1.000 -0.1799 -1.000 0.2907 -0.003460 1.000 -0.2388 -1.000 0.3495 -0.003460 1.000 -0.2976 -1.000 0.4083 -0.003460 1.000 -0.3564 -1.000 0.4671 -0.003460

194
1.000 -0.4152 -1.000 0.5260 -0.003460 1.000 -0.4740 -1.000 0.5848 -0.003460 1.000 -0.5329 -1.000 0.6436 -0.003460 1.000 -0.5917 -1.000 0.7024 -0.003460 1.000 -0.6505 -1.000 0.7612 -0.003460 1.000 -0.7093 -1.000 0.8201 -0.003460 1.000 -0.7682 -1.000 0.8789 -0.003460 1.000 -0.8270 -1.000 0.9377 -0.003460 1.000 -0.8858 -1.000 0.9965 -0.003460 1.000 -0.9429 -1.000 1.057 -0.001730 Linear basis 18.00 1.000 -0.003086 -1.000 0.1080 -0.003086 1.000 -0.05864 -1.000 0.1636 -0.003086 1.000 -0.1142 -1.000 0.2191 -0.003086 1.000 -0.1698 -1.000 0.2747 -0.003086 1.000 -0.2253 -1.000 0.3302 -0.003086 1.000 -0.2809 -1.000 0.3858 -0.003086 1.000 -0.3364 -1.000 0.4414 -0.003086 1.000 -0.3920 -1.000 0.4969 -0.003086 1.000 -0.4475 -1.000 0.5525 -0.003086 1.000 -0.5031 -1.000 0.6080 -0.003086 1.000 -0.5586 -1.000 0.6636 -0.003086 1.000 -0.6142 -1.000 0.7191 -0.003086 1.000 -0.6698 -1.000 0.7747 -0.003086 1.000 -0.7253 -1.000 0.8302 -0.003086 1.000 -0.7809 -1.000 0.8858 -0.003086 1.000 -0.8364 -1.000 0.9414 -0.003086 1.000 -0.8920 -1.000 0.9969 -0.003086 1.000 -0.9460 -1.000 1.054 -0.001543 Linear basis 19.00 1.000 -0.002770 -1.000 0.1025 -0.002770 1.000 -0.05540 -1.000 0.1551 -0.002770 1.000 -0.1080 -1.000 0.2078 -0.002770 1.000 -0.1607 -1.000 0.2604 -0.002770 1.000 -0.2133 -1.000 0.3130 -0.002770 1.000 -0.2659 -1.000 0.3657 -0.002770 1.000 -0.3186 -1.000 0.4183 -0.002770 1.000 -0.3712 -1.000 0.4709 -0.002770 1.000 -0.4238 -1.000 0.5235 -0.002770 1.000 -0.4765 -1.000 0.5762 -0.002770 1.000 -0.5291 -1.000 0.6288 -0.002770 1.000 -0.5817 -1.000 0.6814 -0.002770 1.000 -0.6343 -1.000 0.7341 -0.002770 1.000 -0.6870 -1.000 0.7867 -0.002770 1.000 -0.7396 -1.000 0.8393 -0.002770 1.000 -0.7922 -1.000 0.8920 -0.002770 1.000 -0.8449 -1.000 0.9446 -0.002770 1.000 -0.8975 -1.000 0.9972 -0.002770 1.000 -0.9488 -1.000 1.051 -0.001385 Linear basis 20.00 1.000 -0.002500 -1.000 0.09750 -0.002500 1.000 -0.05250 -1.000 0.1475 -0.002500 1.000 -0.1025 -1.000 0.1975 -0.002500 1.000 -0.1525 -1.000 0.2475 -0.002500 1.000 -0.2025 -1.000 0.2975 -0.002500 1.000 -0.2525 -1.000 0.3475 -0.002500 1.000 -0.3025 -1.000 0.3975 -0.002500 1.000 -0.3525 -1.000 0.4475 -0.002500 1.000 -0.4025 -1.000 0.4975 -0.002500 1.000 -0.4525 -1.000 0.5475 -0.002500 1.000 -0.5025 -1.000 0.5975 -0.002500 1.000 -0.5525 -1.000 0.6475 -0.002500
195
1.000 -0.6025 -1.000 0.6975 -0.002500 1.000 -0.6525 -1.000 0.7475 -0.002500 1.000 -0.7025 -1.000 0.7975 -0.002500 1.000 -0.7525 -1.000 0.8475 -0.002500 1.000 -0.8025 -1.000 0.8975 -0.002500 1.000 -0.8525 -1.000 0.9475 -0.002500 1.000 -0.9025 -1.000 0.9975 -0.002500 1.000 -0.9512 -1.000 1.049 -0.001250 Linear basis 21.00 1.000 -0.002268 -1.000 0.09297 -0.002268 1.000 -0.04989 -1.000 0.1406 -0.002268 1.000 -0.09751 -1.000 0.1882 -0.002268 1.000 -0.1451 -1.000 0.2358 -0.002268 1.000 -0.1927 -1.000 0.2834 -0.002268 1.000 -0.2404 -1.000 0.3311 -0.002268 1.000 -0.2880 -1.000 0.3787 -0.002268 1.000 -0.3356 -1.000 0.4263 -0.002268 1.000 -0.3832 -1.000 0.4739 -0.002268 1.000 -0.4308 -1.000 0.5215 -0.002268 1.000 -0.4785 -1.000 0.5692 -0.002268 1.000 -0.5261 -1.000 0.6168 -0.002268 1.000 -0.5737 -1.000 0.6644 -0.002268 1.000 -0.6213 -1.000 0.7120 -0.002268 1.000 -0.6689 -1.000 0.7596 -0.002268 1.000 -0.7166 -1.000 0.8073 -0.002268 1.000 -0.7642 -1.000 0.8549 -0.002268 1.000 -0.8118 -1.000 0.9025 -0.002268 1.000 -0.8594 -1.000 0.9501 -0.002268 1.000 -0.9070 -1.000 0.9977 -0.002268 1.000 -0.9535 -1.000 1.046 -0.001134 Linear basis 22.00 1.000 -0.002066 -1.000 0.08884 -0.002066 1.000 -0.04752 -1.000 0.1343 -0.002066 1.000 -0.09298 -1.000 0.1798 -0.002066 1.000 -0.1384 -1.000 0.2252 -0.002066 1.000 -0.1839 -1.000 0.2707 -0.002066 1.000 -0.2293 -1.000 0.3161 -0.002066 1.000 -0.2748 -1.000 0.3616 -0.002066 1.000 -0.3202 -1.000 0.4070 -0.002066 1.000 -0.3657 -1.000 0.4525 -0.002066 1.000 -0.4112 -1.000 0.4979 -0.002066 1.000 -0.4566 -1.000 0.5434 -0.002066 1.000 -0.5021 -1.000 0.5888 -0.002066 1.000 -0.5475 -1.000 0.6343 -0.002066 1.000 -0.5930 -1.000 0.6798 -0.002066 1.000 -0.6384 -1.000 0.7252 -0.002066 1.000 -0.6839 -1.000 0.7707 -0.002066 1.000 -0.7293 -1.000 0.8161 -0.002066 1.000 -0.7748 -1.000 0.8616 -0.002066 1.000 -0.8202 -1.000 0.9070 -0.002066 1.000 -0.8657 -1.000 0.9525 -0.002066 1.000 -0.9112 -1.000 0.9979 -0.002066 1.000 -0.9556 -1.000 1.044 -0.001033 Linear basis 23.00 1.000 -0.001890 -1.000 0.08507 -0.001890 1.000 -0.04537 -1.000 0.1285 -0.001890 1.000 -0.08885 -1.000 0.1720 -0.001890 1.000 -0.1323 -1.000 0.2155 -0.001890 1.000 -0.1758 -1.000 0.2590 -0.001890 1.000 -0.2193 -1.000 0.3025 -0.001890 1.000 -0.2628 -1.000 0.3459 -0.001890 1.000 -0.3062 -1.000 0.3894 -0.001890
196
1.000 -0.3497 -1.000 0.4329 -0.001890 1.000 -0.3932 -1.000 0.4764 -0.001890 1.000 -0.4367 -1.000 0.5198 -0.001890 1.000 -0.4802 -1.000 0.5633 -0.001890 1.000 -0.5236 -1.000 0.6068 -0.001890 1.000 -0.5671 -1.000 0.6503 -0.001890 1.000 -0.6106 -1.000 0.6938 -0.001890 1.000 -0.6541 -1.000 0.7372 -0.001890 1.000 -0.6975 -1.000 0.7807 -0.001890 1.000 -0.7410 -1.000 0.8242 -0.001890 1.000 -0.7845 -1.000 0.8677 -0.001890 1.000 -0.8280 -1.000 0.9112 -0.001890 1.000 -0.8715 -1.000 0.9546 -0.001890 1.000 -0.9149 -1.000 0.9981 -0.001890 1.000 -0.9575 -1.000 1.043 -0.0009452 Linear basis 24.00 1.000 -0.001736 -1.000 0.08160 -0.001736 1.000 -0.04340 -1.000 0.1233 -0.001736 1.000 -0.08507 -1.000 0.1649 -0.001736 1.000 -0.1267 -1.000 0.2066 -0.001736 1.000 -0.1684 -1.000 0.2483 -0.001736 1.000 -0.2101 -1.000 0.2899 -0.001736 1.000 -0.2517 -1.000 0.3316 -0.001736 1.000 -0.2934 -1.000 0.3733 -0.001736 1.000 -0.3351 -1.000 0.4149 -0.001736 1.000 -0.3767 -1.000 0.4566 -0.001736 1.000 -0.4184 -1.000 0.4983 -0.001736 1.000 -0.4601 -1.000 0.5399 -0.001736 1.000 -0.5017 -1.000 0.5816 -0.001736 1.000 -0.5434 -1.000 0.6233 -0.001736 1.000 -0.5851 -1.000 0.6649 -0.001736 1.000 -0.6267 -1.000 0.7066 -0.001736 1.000 -0.6684 -1.000 0.7483 -0.001736 1.000 -0.7101 -1.000 0.7899 -0.001736 1.000 -0.7517 -1.000 0.8316 -0.001736 1.000 -0.7934 -1.000 0.8733 -0.001736 1.000 -0.8351 -1.000 0.9149 -0.001736 1.000 -0.8767 -1.000 0.9566 -0.001736 1.000 -0.9184 -1.000 0.9983 -0.001736 1.000 -0.9592 -1.000 1.041 -0.0008681 Quadratic basis 1.000 1.000 2.000 -0.3333 -2.000 2.000 -0.3333 1.000 -4.000 2.667 -1.333 1.000 0.0000 -0.3333 -2.000 6.000 -3.333 1.000 -6.000 8.667 -0.3333 Quadratic basis 2.000 1.000 1.000 0.04167 -2.000 1.000 0.04167 1.000 -2.000 0.7917 -0.2083 1.000 0.0000 -0.2083 -2.000 3.000 -0.9583 1.000 -3.000 2.042 -0.2083 1.000 -1.000 0.2083 -2.000 5.000 -2.792 1.000 -4.000 3.958 -0.04167 Quadratic basis 3.000 1.000 0.6667 0.04938 -2.000 0.6667 0.04938 1.000 -1.333 0.3827 -0.06173 1.000 0.0000 -0.07407 -2.000 2.000 -0.4074 1.000 -2.000 0.9259 -0.07407 1.000 -0.6667 0.04938 -2.000 3.333 -1.284 1.000 -2.667 1.716 -0.06173 1.000 -1.333 0.4321 -2.000 4.667 -2.568 1.000 -3.333 2.765 -0.01235 Quadratic basis 4.000 1.000 0.5000 0.03646 -2.000 0.5000 0.03646 1.000 -1.000 0.2240 -0.02604 1.000 0.0000 -0.03125 -2.000 1.500 -0.2188 1.000 -1.500 0.5313 -0.03125 1.000 -0.5000 0.03125 -2.000 2.500 -0.7188 1.000 -2.000 0.9688 -0.03125 1.000 -1.000 0.2240 -2.000 3.500 -1.464 1.000 -2.500 1.536 -0.02604 1.000 -1.500 0.5573 -2.000 4.500 -2.443 1.000 -3.000 2.245 -0.005208

197
Quadratic basis 5.000 1.000 0.4000 0.02667 -2.000 0.4000 0.02667 1.000 -0.8000 0.1467 -0.01333 1.000 0.0000 -0.01600 -2.000 1.200 -0.1360 1.000 -1.200 0.3440 -0.01600 1.000 -0.4000 0.02400 -2.000 2.000 -0.4560 1.000 -1.600 0.6240 -0.01600 1.000 -0.8000 0.1440 -2.000 2.800 -0.9360 1.000 -2.000 0.9840 -0.01600 1.000 -1.200 0.3467 -2.000 3.600 -1.573 1.000 -2.400 1.427 -0.01333 1.000 -1.600 0.6373 -2.000 4.400 -2.363 1.000 -2.800 1.957 -0.002667 Quadratic basis 6.000 1.000 0.3333 0.02006 -2.000 0.3333 0.02006 1.000 -0.6667 0.1034 -0.007716 1.000 0.0000 -0.009259 -2.000 1.000 -0.09259 1.000 -1.000 0.2407 -0.009259 1.000 -0.3333 0.01852 -2.000 1.667 -0.3148 1.000 -1.333 0.4352 -0.009259 1.000 -0.6667 0.1019 -2.000 2.333 -0.6481 1.000 -1.667 0.6852 -0.009259 1.000 -1.000 0.2407 -2.000 3.000 -1.093 1.000 -2.000 0.9907 -0.009259 1.000 -1.333 0.4367 -2.000 3.667 -1.647 1.000 -2.333 1.353 -0.007716 1.000 -1.667 0.6929 -2.000 4.333 -2.307 1.000 -2.667 1.776 -0.001543 Quadratic basis 7.000 1.000 0.2857 0.01555 -2.000 0.2857 0.01555 1.000 -0.5714 0.07677 -0.004859 1.000 0.0000 -0.005831 -2.000 0.8571 -0.06706 1.000 -0.8571 0.1778 -0.005831 1.000 -0.2857 0.01458 -2.000 1.429 -0.2303 1.000 -1.143 0.3207 -0.005831 1.000 -0.5714 0.07580 -2.000 2.000 -0.4752 1.000 -1.429 0.5044 -0.005831 1.000 -0.8571 0.1778 -2.000 2.571 -0.8017 1.000 -1.714 0.7289 -0.005831 1.000 -1.143 0.3207 -2.000 3.143 -1.210 1.000 -2.000 0.9942 -0.005831 1.000 -1.429 0.5053 -2.000 3.714 -1.699 1.000 -2.286 1.301 -0.004859 1.000 -1.714 0.7337 -2.000 4.286 -2.266 1.000 -2.571 1.652 -0.0009718 Quadratic basis 8.000 1.000 0.2500 0.01237 -2.000 0.2500 0.01237 1.000 -0.5000 0.05924 -0.003255 1.000 0.0000 -0.003906 -2.000 0.7500 -0.05078 1.000 -0.7500 0.1367 -0.003906 1.000 -0.2500 0.01172 -2.000 1.250 -0.1758 1.000 -1.000 0.2461 -0.003906 1.000 -0.5000 0.05859 -2.000 1.750 -0.3633 1.000 -1.250 0.3867 -0.003906 1.000 -0.7500 0.1367 -2.000 2.250 -0.6133 1.000 -1.500 0.5586 -0.003906 1.000 -1.000 0.2461 -2.000 2.750 -0.9258 1.000 -1.750 0.7617 -0.003906 1.000 -1.250 0.3867 -2.000 3.250 -1.301 1.000 -2.000 0.9961 -0.003906 1.000 -1.500 0.5592 -2.000 3.750 -1.738 1.000 -2.250 1.262 -0.003255 1.000 -1.750 0.7650 -2.000 4.250 -2.235 1.000 -2.500 1.562 -0.0006510 Quadratic basis 9.000 1.000 0.2222 0.01006 -2.000 0.2222 0.01006 1.000 -0.4444 0.04710 -0.002286 1.000 0.0000 -0.002743 -2.000 0.6667 -0.03978 1.000 -0.6667 0.1084 -0.002743 1.000 -0.2222 0.009602 -2.000 1.111 -0.1385 1.000 -0.8889 0.1948 -0.002743 1.000 -0.4444 0.04664 -2.000 1.556 -0.2867 1.000 -1.111 0.3059 -0.002743 1.000 -0.6667 0.1084 -2.000 2.000 -0.4842 1.000 -1.333 0.4417 -0.002743 1.000 -0.8889 0.1948 -2.000 2.444 -0.7311 1.000 -1.556 0.6022 -0.002743 1.000 -1.111 0.3059 -2.000 2.889 -1.027 1.000 -1.778 0.7874 -0.002743 1.000 -1.333 0.4417 -2.000 3.333 -1.373 1.000 -2.000 0.9973 -0.002743 1.000 -1.556 0.6027 -2.000 3.778 -1.768 1.000 -2.222 1.232 -0.002286 1.000 -1.778 0.7897 -2.000 4.222 -2.210 1.000 -2.444 1.493 -0.0004572 Quadratic basis 10.00 1.000 0.2000 0.008333 -2.000 0.2000 0.008333 1.000 -0.4000 0.03833 -0.001667 1.000 0.0000 -0.002000 -2.000 0.6000 -0.03200 1.000 -0.6000 0.08800 -0.002000 1.000 -0.2000 0.008000 -2.000 1.000 -0.1120 1.000 -0.8000 0.1580 -0.002000 1.000 -0.4000 0.03800 -2.000 1.400 -0.2320 1.000 -1.000 0.2480 -0.002000 1.000 -0.6000 0.08800 -2.000 1.800 -0.3920 1.000 -1.200 0.3580 -0.002000 1.000 -0.8000 0.1580 -2.000 2.200 -0.5920 1.000 -1.400 0.4880 -0.002000 1.000 -1.000 0.2480 -2.000 2.600 -0.8320 1.000 -1.600 0.6380 -0.002000 1.000 -1.200 0.3580 -2.000 3.000 -1.112 1.000 -1.800 0.8080 -0.002000 1.000 -1.400 0.4880 -2.000 3.400 -1.432 1.000 -2.000 0.9980 -0.002000 1.000 -1.600 0.6383 -2.000 3.800 -1.792 1.000 -2.200 1.208 -0.001667

198
1.000 -1.800 0.8097 -2.000 4.200 -2.190 1.000 -2.400 1.440 -0.0003333 Quadratic basis 11.00 1.000 0.1818 0.007012 -2.000 0.1818 0.007012 1.000 -0.3636 0.03181 -0.001252 1.000 0.0000 -0.001503 -2.000 0.5455 -0.02630 1.000 -0.5455 0.07288 -0.001503 1.000 -0.1818 0.006762 -2.000 0.9091 -0.09241 1.000 -0.7273 0.1307 -0.001503 1.000 -0.3636 0.03156 -2.000 1.273 -0.1916 1.000 -0.9091 0.2051 -0.001503 1.000 -0.5455 0.07288 -2.000 1.636 -0.3238 1.000 -1.091 0.2960 -0.001503 1.000 -0.7273 0.1307 -2.000 2.000 -0.4891 1.000 -1.273 0.4035 -0.001503 1.000 -0.9091 0.2051 -2.000 2.364 -0.6875 1.000 -1.455 0.5274 -0.001503 1.000 -1.091 0.2960 -2.000 2.727 -0.9189 1.000 -1.636 0.6679 -0.001503 1.000 -1.273 0.4035 -2.000 3.091 -1.183 1.000 -1.818 0.8249 -0.001503 1.000 -1.455 0.5274 -2.000 3.455 -1.481 1.000 -2.000 0.9985 -0.001503 1.000 -1.636 0.6682 -2.000 3.818 -1.811 1.000 -2.182 1.189 -0.001252 1.000 -1.818 0.8262 -2.000 4.182 -2.174 1.000 -2.364 1.396 -0.0002504 Quadratic basis 12.00 1.000 0.1667 0.005980 -2.000 0.1667 0.005980 1.000 -0.3333 0.02681 -0.0009645 1.000 0.0000 -0.001157 -2.000 0.5000 -0.02199 1.000 -0.5000 0.06134 -0.001157 1.000 -0.1667 0.005787 -2.000 0.8333 -0.07755 1.000 -0.6667 0.1100 -0.001157 1.000 -0.3333 0.02662 -2.000 1.167 -0.1609 1.000 -0.8333 0.1725 -0.001157 1.000 -0.5000 0.06134 -2.000 1.500 -0.2720 1.000 -1.000 0.2488 -0.001157 1.000 -0.6667 0.1100 -2.000 1.833 -0.4109 1.000 -1.167 0.3391 -0.001157 1.000 -0.8333 0.1725 -2.000 2.167 -0.5775 1.000 -1.333 0.4433 -0.001157 1.000 -1.000 0.2488 -2.000 2.500 -0.7720 1.000 -1.500 0.5613 -0.001157 1.000 -1.167 0.3391 -2.000 2.833 -0.9942 1.000 -1.667 0.6933 -0.001157 1.000 -1.333 0.4433 -2.000 3.167 -1.244 1.000 -1.833 0.8391 -0.001157 1.000 -1.500 0.5613 -2.000 3.500 -1.522 1.000 -2.000 0.9988 -0.001157 1.000 -1.667 0.6935 -2.000 3.833 -1.827 1.000 -2.167 1.173 -0.0009645 1.000 -1.833 0.8401 -2.000 4.167 -2.160 1.000 -2.333 1.361 -0.0001929 Quadratic basis 13.00 1.000 0.1538 0.005159 -2.000 0.1538 0.005159 1.000 -0.3077 0.02291 -0.0007586 1.000 0.0000 -0.0009103 -2.000 0.4615 -0.01866 1.000 -0.4615 0.05234 -0.0009103 1.000 -0.1538 0.005007 -2.000 0.7692 -0.06600 1.000 -0.6154 0.09376 -0.0009103 1.000 -0.3077 0.02276 -2.000 1.077 -0.1370 1.000 -0.7692 0.1470 -0.0009103 1.000 -0.4615 0.05234 -2.000 1.385 -0.2317 1.000 -0.9231 0.2121 -0.0009103 1.000 -0.6154 0.09376 -2.000 1.692 -0.3500 1.000 -1.077 0.2890 -0.0009103 1.000 -0.7692 0.1470 -2.000 2.000 -0.4920 1.000 -1.231 0.3778 -0.0009103 1.000 -0.9231 0.2121 -2.000 2.308 -0.6577 1.000 -1.385 0.4784 -0.0009103 1.000 -1.077 0.2890 -2.000 2.615 -0.8471 1.000 -1.538 0.5908 -0.0009103 1.000 -1.231 0.3778 -2.000 2.923 -1.060 1.000 -1.692 0.7151 -0.0009103 1.000 -1.385 0.4784 -2.000 3.231 -1.297 1.000 -1.846 0.8512 -0.0009103 1.000 -1.538 0.5908 -2.000 3.538 -1.557 1.000 -2.000 0.9991 -0.0009103 1.000 -1.692 0.7152 -2.000 3.846 -1.841 1.000 -2.154 1.159 -0.0007586 1.000 -1.846 0.8519 -2.000 4.154 -2.148 1.000 -2.308 1.331 -0.0001517 Quadratic basis 14.00 1.000 0.1429 0.004495 -2.000 0.1429 0.004495 1.000 -0.2857 0.01980 -0.0006074 1.000 0.0000 -0.0007289 -2.000 0.4286 -0.01603 1.000 -0.4286 0.04519 -0.0007289 1.000 -0.1429 0.004373 -2.000 0.7143 -0.05685 1.000 -0.5714 0.08090 -0.0007289 1.000 -0.2857 0.01968 -2.000 1.000 -0.1181 1.000 -0.7143 0.1268 -0.0007289 1.000 -0.4286 0.04519 -2.000 1.286 -0.1997 1.000 -0.8571 0.1829 -0.0007289 1.000 -0.5714 0.08090 -2.000 1.571 -0.3017 1.000 -1.000 0.2493 -0.0007289 1.000 -0.7143 0.1268 -2.000 1.857 -0.4242 1.000 -1.143 0.3258 -0.0007289 1.000 -0.8571 0.1829 -2.000 2.143 -0.5671 1.000 -1.286 0.4125 -0.0007289 1.000 -1.000 0.2493 -2.000 2.429 -0.7303 1.000 -1.429 0.5095 -0.0007289 1.000 -1.143 0.3258 -2.000 2.714 -0.9140 1.000 -1.571 0.6166 -0.0007289 1.000 -1.286 0.4125 -2.000 3.000 -1.118 1.000 -1.714 0.7340 -0.0007289 1.000 -1.429 0.5095 -2.000 3.286 -1.343 1.000 -1.857 0.8615 -0.0007289 1.000 -1.571 0.6166 -2.000 3.571 -1.587 1.000 -2.000 0.9993 -0.0007289 1.000 -1.714 0.7341 -2.000 3.857 -1.853 1.000 -2.143 1.147 -0.0006074 1.000 -1.857 0.8621 -2.000 4.143 -2.138 1.000 -2.286 1.306 -0.0001215

199
Quadratic basis 15.00 1.000 0.1333 0.003951 -2.000 0.1333 0.003951 1.000 -0.2667 0.01728 -0.0004938 1.000 0.0000 -0.0005926 -2.000 0.4000 -0.01393 1.000 -0.4000 0.03941 -0.0005926 1.000 -0.1333 0.003852 -2.000 0.6667 -0.04948 1.000 -0.5333 0.07052 -0.0005926 1.000 -0.2667 0.01719 -2.000 0.9333 -0.1028 1.000 -0.6667 0.1105 -0.0005926 1.000 -0.4000 0.03941 -2.000 1.200 -0.1739 1.000 -0.8000 0.1594 -0.0005926 1.000 -0.5333 0.07052 -2.000 1.467 -0.2628 1.000 -0.9333 0.2172 -0.0005926 1.000 -0.6667 0.1105 -2.000 1.733 -0.3695 1.000 -1.067 0.2839 -0.0005926 1.000 -0.8000 0.1594 -2.000 2.000 -0.4939 1.000 -1.200 0.3594 -0.0005926 1.000 -0.9333 0.2172 -2.000 2.267 -0.6361 1.000 -1.333 0.4439 -0.0005926 1.000 -1.067 0.2839 -2.000 2.533 -0.7961 1.000 -1.467 0.5372 -0.0005926 1.000 -1.200 0.3594 -2.000 2.800 -0.9739 1.000 -1.600 0.6394 -0.0005926 1.000 -1.333 0.4439 -2.000 3.067 -1.169 1.000 -1.733 0.7505 -0.0005926 1.000 -1.467 0.5372 -2.000 3.333 -1.383 1.000 -1.867 0.8705 -0.0005926 1.000 -1.600 0.6394 -2.000 3.600 -1.614 1.000 -2.000 0.9994 -0.0005926 1.000 -1.733 0.7506 -2.000 3.867 -1.863 1.000 -2.133 1.137 -0.0004938 1.000 -1.867 0.8710 -2.000 4.133 -2.129 1.000 -2.267 1.284 -9.877e-005 Quadratic basis 16.00 1.000 0.1250 0.003499 -2.000 0.1250 0.003499 1.000 -0.2500 0.01522 -0.0004069 1.000 0.0000 -0.0004883 -2.000 0.3750 -0.01221 1.000 -0.3750 0.03467 -0.0004883 1.000 -0.1250 0.003418 -2.000 0.6250 -0.04346 1.000 -0.5000 0.06201 -0.0004883 1.000 -0.2500 0.01514 -2.000 0.8750 -0.09033 1.000 -0.6250 0.09717 -0.0004883 1.000 -0.3750 0.03467 -2.000 1.125 -0.1528 1.000 -0.7500 0.1401 -0.0004883 1.000 -0.5000 0.06201 -2.000 1.375 -0.2310 1.000 -0.8750 0.1909 -0.0004883 1.000 -0.6250 0.09717 -2.000 1.625 -0.3247 1.000 -1.000 0.2495 -0.0004883 1.000 -0.7500 0.1401 -2.000 1.875 -0.4341 1.000 -1.125 0.3159 -0.0004883 1.000 -0.8750 0.1909 -2.000 2.125 -0.5591 1.000 -1.250 0.3901 -0.0004883 1.000 -1.000 0.2495 -2.000 2.375 -0.6997 1.000 -1.375 0.4722 -0.0004883 1.000 -1.125 0.3159 -2.000 2.625 -0.8560 1.000 -1.500 0.5620 -0.0004883 1.000 -1.250 0.3901 -2.000 2.875 -1.028 1.000 -1.625 0.6597 -0.0004883 1.000 -1.375 0.4722 -2.000 3.125 -1.215 1.000 -1.750 0.7651 -0.0004883 1.000 -1.500 0.5620 -2.000 3.375 -1.418 1.000 -1.875 0.8784 -0.0004883 1.000 -1.625 0.6597 -2.000 3.625 -1.637 1.000 -2.000 0.9995 -0.0004883 1.000 -1.750 0.7652 -2.000 3.875 -1.872 1.000 -2.125 1.128 -0.0004069 1.000 -1.875 0.8788 -2.000 4.125 -2.121 1.000 -2.250 1.266 -8.138e-005 Quadratic basis 17.00 1.000 0.1176 0.003121 -2.000 0.1176 0.003121 1.000 -0.2353 0.01350 -0.0003392 1.000 0.0000 -0.0004071 -2.000 0.3529 -0.01079 1.000 -0.3529 0.03073 -0.0004071 1.000 -0.1176 0.003053 -2.000 0.5882 -0.03847 1.000 -0.4706 0.05496 -0.0004071 1.000 -0.2353 0.01343 -2.000 0.8235 -0.07999 1.000 -0.5882 0.08610 -0.0004071 1.000 -0.3529 0.03073 -2.000 1.059 -0.1354 1.000 -0.7059 0.1242 -0.0004071 1.000 -0.4706 0.05496 -2.000 1.294 -0.2046 1.000 -0.8235 0.1691 -0.0004071 1.000 -0.5882 0.08610 -2.000 1.529 -0.2876 1.000 -0.9412 0.2210 -0.0004071 1.000 -0.7059 0.1242 -2.000 1.765 -0.3845 1.000 -1.059 0.2799 -0.0004071 1.000 -0.8235 0.1691 -2.000 2.000 -0.4952 1.000 -1.176 0.3456 -0.0004071 1.000 -0.9412 0.2210 -2.000 2.235 -0.6198 1.000 -1.294 0.4183 -0.0004071 1.000 -1.059 0.2799 -2.000 2.471 -0.7582 1.000 -1.412 0.4979 -0.0004071 1.000 -1.176 0.3456 -2.000 2.706 -0.9104 1.000 -1.529 0.5844 -0.0004071 1.000 -1.294 0.4183 -2.000 2.941 -1.077 1.000 -1.647 0.6778 -0.0004071 1.000 -1.412 0.4979 -2.000 3.176 -1.256 1.000 -1.765 0.7781 -0.0004071 1.000 -1.529 0.5844 -2.000 3.412 -1.450 1.000 -1.882 0.8854 -0.0004071 1.000 -1.647 0.6778 -2.000 3.647 -1.658 1.000 -2.000 0.9996 -0.0004071 1.000 -1.765 0.7782 -2.000 3.882 -1.879 1.000 -2.118 1.121 -0.0003392 1.000 -1.882 0.8857 -2.000 4.118 -2.114 1.000 -2.235 1.249 -6.785e-005 Quadratic basis 18.00 1.000 0.1111 0.002801 -2.000 0.1111 0.002801 1.000 -0.2222 0.01206 -0.0002858 1.000 0.0000 -0.0003429 -2.000 0.3333 -0.009602 1.000 -0.3333 0.02743 -0.0003429 1.000 -0.1111 0.002743 -2.000 0.5556 -0.03429 1.000 -0.4444 0.04904 -0.0003429 1.000 -0.2222 0.01200 -2.000 0.7778 -0.07133 1.000 -0.5556 0.07682 -0.0003429 1.000 -0.3333 0.02743 -2.000 1.000 -0.1207 1.000 -0.6667 0.1108 -0.0003429 1.000 -0.4444 0.04904 -2.000 1.222 -0.1824 1.000 -0.7778 0.1509 -0.0003429

200
1.000 -0.5556 0.07682 -2.000 1.444 -0.2565 1.000 -0.8889 0.1972 -0.0003429 1.000 -0.6667 0.1108 -2.000 1.667 -0.3429 1.000 -1.000 0.2497 -0.0003429 1.000 -0.7778 0.1509 -2.000 1.889 -0.4417 1.000 -1.111 0.3083 -0.0003429 1.000 -0.8889 0.1972 -2.000 2.111 -0.5528 1.000 -1.222 0.3731 -0.0003429 1.000 -1.000 0.2497 -2.000 2.333 -0.6763 1.000 -1.333 0.4441 -0.0003429 1.000 -1.111 0.3083 -2.000 2.556 -0.8121 1.000 -1.444 0.5213 -0.0003429 1.000 -1.222 0.3731 -2.000 2.778 -0.9602 1.000 -1.556 0.6046 -0.0003429 1.000 -1.333 0.4441 -2.000 3.000 -1.121 1.000 -1.667 0.6941 -0.0003429 1.000 -1.444 0.5213 -2.000 3.222 -1.294 1.000 -1.778 0.7898 -0.0003429 1.000 -1.556 0.6046 -2.000 3.444 -1.479 1.000 -1.889 0.8916 -0.0003429 1.000 -1.667 0.6941 -2.000 3.667 -1.676 1.000 -2.000 0.9997 -0.0003429 1.000 -1.778 0.7898 -2.000 3.889 -1.886 1.000 -2.111 1.114 -0.0002858 1.000 -1.889 0.8919 -2.000 4.111 -2.108 1.000 -2.222 1.235 -5.716e-005 Quadratic basis 19.00 1.000 0.1053 0.002527 -2.000 0.1053 0.002527 1.000 -0.2105 0.01084 -0.0002430 1.000 0.0000 -0.0002916 -2.000 0.3158 -0.008602 1.000 -0.3158 0.02464 -0.0002916 1.000 -0.1053 0.002478 -2.000 0.5263 -0.03076 1.000 -0.4211 0.04403 -0.0002916 1.000 -0.2105 0.01079 -2.000 0.7368 -0.06400 1.000 -0.5263 0.06896 -0.0002916 1.000 -0.3158 0.02464 -2.000 0.9474 -0.1083 1.000 -0.6316 0.09943 -0.0002916 1.000 -0.4211 0.04403 -2.000 1.158 -0.1637 1.000 -0.7368 0.1354 -0.0002916 1.000 -0.5263 0.06896 -2.000 1.368 -0.2302 1.000 -0.8421 0.1770 -0.0002916 1.000 -0.6316 0.09943 -2.000 1.579 -0.3078 1.000 -0.9474 0.2241 -0.0002916 1.000 -0.7368 0.1354 -2.000 1.789 -0.3964 1.000 -1.053 0.2767 -0.0002916 1.000 -0.8421 0.1770 -2.000 2.000 -0.4961 1.000 -1.158 0.3349 -0.0002916 1.000 -0.9474 0.2241 -2.000 2.211 -0.6069 1.000 -1.263 0.3986 -0.0002916 1.000 -1.053 0.2767 -2.000 2.421 -0.7288 1.000 -1.368 0.4679 -0.0002916 1.000 -1.158 0.3349 -2.000 2.632 -0.8618 1.000 -1.474 0.5426 -0.0002916 1.000 -1.263 0.3986 -2.000 2.842 -1.006 1.000 -1.579 0.6230 -0.0002916 1.000 -1.368 0.4679 -2.000 3.053 -1.161 1.000 -1.684 0.7088 -0.0002916 1.000 -1.474 0.5426 -2.000 3.263 -1.327 1.000 -1.789 0.8003 -0.0002916 1.000 -1.579 0.6230 -2.000 3.474 -1.504 1.000 -1.895 0.8972 -0.0002916 1.000 -1.684 0.7088 -2.000 3.684 -1.693 1.000 -2.000 0.9997 -0.0002916 1.000 -1.789 0.8003 -2.000 3.895 -1.892 1.000 -2.105 1.108 -0.0002430 1.000 -1.895 0.8975 -2.000 4.105 -2.103 1.000 -2.211 1.222 -4.860e-005 Quadratic basis 20.00 1.000 0.1000 0.002292 -2.000 0.1000 0.002292 1.000 -0.2000 0.009792 -0.0002083 1.000 0.0000 -0.0002500 -2.000 0.3000 -0.007750 1.000 -0.3000 0.02225 -0.0002500 1.000 -0.1000 0.002250 -2.000 0.5000 -0.02775 1.000 -0.4000 0.03975 -0.0002500 1.000 -0.2000 0.009750 -2.000 0.7000 -0.05775 1.000 -0.5000 0.06225 -0.0002500 1.000 -0.3000 0.02225 -2.000 0.9000 -0.09775 1.000 -0.6000 0.08975 -0.0002500 1.000 -0.4000 0.03975 -2.000 1.100 -0.1477 1.000 -0.7000 0.1223 -0.0002500 1.000 -0.5000 0.06225 -2.000 1.300 -0.2077 1.000 -0.8000 0.1598 -0.0002500 1.000 -0.6000 0.08975 -2.000 1.500 -0.2778 1.000 -0.9000 0.2023 -0.0002500 1.000 -0.7000 0.1223 -2.000 1.700 -0.3577 1.000 -1.000 0.2498 -0.0002500 1.000 -0.8000 0.1598 -2.000 1.900 -0.4477 1.000 -1.100 0.3023 -0.0002500 1.000 -0.9000 0.2023 -2.000 2.100 -0.5477 1.000 -1.200 0.3598 -0.0002500 1.000 -1.000 0.2498 -2.000 2.300 -0.6577 1.000 -1.300 0.4223 -0.0002500 1.000 -1.100 0.3023 -2.000 2.500 -0.7777 1.000 -1.400 0.4898 -0.0002500 1.000 -1.200 0.3598 -2.000 2.700 -0.9077 1.000 -1.500 0.5623 -0.0002500 1.000 -1.300 0.4223 -2.000 2.900 -1.048 1.000 -1.600 0.6398 -0.0002500 1.000 -1.400 0.4898 -2.000 3.100 -1.198 1.000 -1.700 0.7223 -0.0002500 1.000 -1.500 0.5623 -2.000 3.300 -1.358 1.000 -1.800 0.8098 -0.0002500 1.000 -1.600 0.6398 -2.000 3.500 -1.528 1.000 -1.900 0.9023 -0.0002500 1.000 -1.700 0.7223 -2.000 3.700 -1.708 1.000 -2.000 0.9998 -0.0002500 1.000 -1.800 0.8098 -2.000 3.900 -1.898 1.000 -2.100 1.102 -0.0002083 1.000 -1.900 0.9025 -2.000 4.100 -2.098 1.000 -2.200 1.210 -4.167e-005 Quadratic basis 21.00 1.000 0.09524 0.002088 -2.000 0.09524 0.002088 1.000 -0.1905 0.008890 -0.0001800 1.000 0.0000 -0.0002160 -2.000 0.2857 -0.007019 1.000 -0.2857 0.02019 -0.0002160 1.000 -0.09524 0.002052 -2.000 0.4762 -0.02516 1.000 -0.3810 0.03607 -0.0002160 1.000 -0.1905 0.008854 -2.000 0.6667 -0.05237 1.000 -0.4762 0.05647 -0.0002160 1.000 -0.2857 0.02019 -2.000 0.8571 -0.08865 1.000 -0.5714 0.08142 -0.0002160

201
1.000 -0.3810 0.03607 -2.000 1.048 -0.1340 1.000 -0.6667 0.1109 -0.0002160 1.000 -0.4762 0.05647 -2.000 1.238 -0.1884 1.000 -0.7619 0.1449 -0.0002160 1.000 -0.5714 0.08142 -2.000 1.429 -0.2519 1.000 -0.8571 0.1835 -0.0002160 1.000 -0.6667 0.1109 -2.000 1.619 -0.3245 1.000 -0.9524 0.2265 -0.0002160 1.000 -0.7619 0.1449 -2.000 1.810 -0.4061 1.000 -1.048 0.2742 -0.0002160 1.000 -0.8571 0.1835 -2.000 2.000 -0.4968 1.000 -1.143 0.3263 -0.0002160 1.000 -0.9524 0.2265 -2.000 2.190 -0.5966 1.000 -1.238 0.3830 -0.0002160 1.000 -1.048 0.2742 -2.000 2.381 -0.7054 1.000 -1.333 0.4442 -0.0002160 1.000 -1.143 0.3263 -2.000 2.571 -0.8233 1.000 -1.429 0.5100 -0.0002160 1.000 -1.238 0.3830 -2.000 2.762 -0.9503 1.000 -1.524 0.5803 -0.0002160 1.000 -1.333 0.4442 -2.000 2.952 -1.086 1.000 -1.619 0.6551 -0.0002160 1.000 -1.429 0.5100 -2.000 3.143 -1.232 1.000 -1.714 0.7345 -0.0002160 1.000 -1.524 0.5803 -2.000 3.333 -1.386 1.000 -1.810 0.8184 -0.0002160 1.000 -1.619 0.6551 -2.000 3.524 -1.549 1.000 -1.905 0.9068 -0.0002160 1.000 -1.714 0.7345 -2.000 3.714 -1.721 1.000 -2.000 0.9998 -0.0002160 1.000 -1.810 0.8184 -2.000 3.905 -1.903 1.000 -2.095 1.097 -0.0001800 1.000 -1.905 0.9070 -2.000 4.095 -2.093 1.000 -2.190 1.200 -3.599e-005 Quadratic basis 22.00 1.000 0.09091 0.001910 -2.000 0.09091 0.001910 1.000 -0.1818 0.008108 -0.0001565 1.000 0.0000 -0.0001878 -2.000 0.2727 -0.006386 1.000 -0.2727 0.01841 -0.0001878 1.000 -0.09091 0.001878 -2.000 0.4545 -0.02292 1.000 -0.3636 0.03287 -0.0001878 1.000 -0.1818 0.008077 -2.000 0.6364 -0.04771 1.000 -0.4545 0.05147 -0.0001878 1.000 -0.2727 0.01841 -2.000 0.8182 -0.08077 1.000 -0.5455 0.07419 -0.0001878 1.000 -0.3636 0.03287 -2.000 1.000 -0.1221 1.000 -0.6364 0.1011 -0.0001878 1.000 -0.4545 0.05147 -2.000 1.182 -0.1717 1.000 -0.7273 0.1320 -0.0001878 1.000 -0.5455 0.07419 -2.000 1.364 -0.2295 1.000 -0.8182 0.1672 -0.0001878 1.000 -0.6364 0.1011 -2.000 1.545 -0.2956 1.000 -0.9091 0.2064 -0.0001878 1.000 -0.7273 0.1320 -2.000 1.727 -0.3700 1.000 -1.000 0.2498 -0.0001878 1.000 -0.8182 0.1672 -2.000 1.909 -0.4527 1.000 -1.091 0.2973 -0.0001878 1.000 -0.9091 0.2064 -2.000 2.091 -0.5436 1.000 -1.182 0.3490 -0.0001878 1.000 -1.000 0.2498 -2.000 2.273 -0.6427 1.000 -1.273 0.4048 -0.0001878 1.000 -1.091 0.2973 -2.000 2.455 -0.7502 1.000 -1.364 0.4647 -0.0001878 1.000 -1.182 0.3490 -2.000 2.636 -0.8659 1.000 -1.455 0.5287 -0.0001878 1.000 -1.273 0.4048 -2.000 2.818 -0.9899 1.000 -1.545 0.5969 -0.0001878 1.000 -1.364 0.4647 -2.000 3.000 -1.122 1.000 -1.636 0.6692 -0.0001878 1.000 -1.455 0.5287 -2.000 3.182 -1.263 1.000 -1.727 0.7457 -0.0001878 1.000 -1.545 0.5969 -2.000 3.364 -1.411 1.000 -1.818 0.8263 -0.0001878 1.000 -1.636 0.6692 -2.000 3.545 -1.568 1.000 -1.909 0.9110 -0.0001878 1.000 -1.727 0.7457 -2.000 3.727 -1.734 1.000 -2.000 0.9998 -0.0001878 1.000 -1.818 0.8263 -2.000 3.909 -1.907 1.000 -2.091 1.093 -0.0001565 1.000 -1.909 0.9111 -2.000 4.091 -2.089 1.000 -2.182 1.190 -3.130e-005 Quadratic basis 23.00 1.000 0.08696 0.001753 -2.000 0.08696 0.001753 1.000 -0.1739 0.007424 -0.0001370 1.000 0.0000 -0.0001644 -2.000 0.2609 -0.005835 1.000 -0.2609 0.01685 -0.0001644 1.000 -0.08696 0.001726 -2.000 0.4348 -0.02096 1.000 -0.3478 0.03008 -0.0001644 1.000 -0.1739 0.007397 -2.000 0.6087 -0.04364 1.000 -0.4348 0.04709 -0.0001644 1.000 -0.2609 0.01685 -2.000 0.7826 -0.07389 1.000 -0.5217 0.06789 -0.0001644 1.000 -0.3478 0.03008 -2.000 0.9565 -0.1117 1.000 -0.6087 0.09246 -0.0001644 1.000 -0.4348 0.04709 -2.000 1.130 -0.1571 1.000 -0.6957 0.1208 -0.0001644 1.000 -0.5217 0.06789 -2.000 1.304 -0.2100 1.000 -0.7826 0.1530 -0.0001644 1.000 -0.6087 0.09246 -2.000 1.478 -0.2705 1.000 -0.8696 0.1889 -0.0001644 1.000 -0.6957 0.1208 -2.000 1.652 -0.3385 1.000 -0.9565 0.2286 -0.0001644 1.000 -0.7826 0.1530 -2.000 1.826 -0.4142 1.000 -1.043 0.2720 -0.0001644 1.000 -0.8696 0.1889 -2.000 2.000 -0.4973 1.000 -1.130 0.3193 -0.0001644 1.000 -0.9565 0.2286 -2.000 2.174 -0.5881 1.000 -1.217 0.3703 -0.0001644 1.000 -1.043 0.2720 -2.000 2.348 -0.6864 1.000 -1.304 0.4252 -0.0001644 1.000 -1.130 0.3193 -2.000 2.522 -0.7922 1.000 -1.391 0.4838 -0.0001644 1.000 -1.217 0.3703 -2.000 2.696 -0.9056 1.000 -1.478 0.5461 -0.0001644 1.000 -1.304 0.4252 -2.000 2.870 -1.027 1.000 -1.565 0.6123 -0.0001644 1.000 -1.391 0.4838 -2.000 3.043 -1.155 1.000 -1.652 0.6823 -0.0001644 1.000 -1.478 0.5461 -2.000 3.217 -1.291 1.000 -1.739 0.7560 -0.0001644 1.000 -1.565 0.6123 -2.000 3.391 -1.435 1.000 -1.826 0.8335 -0.0001644 1.000 -1.652 0.6823 -2.000 3.565 -1.586 1.000 -1.913 0.9148 -0.0001644 1.000 -1.739 0.7560 -2.000 3.739 -1.745 1.000 -2.000 0.9998 -0.0001644

202
1.000 -1.826 0.8335 -2.000 3.913 -1.911 1.000 -2.087 1.089 -0.0001370 1.000 -1.913 0.9149 -2.000 4.087 -2.085 1.000 -2.174 1.181 -2.740e-005 Cubic basis 1.000 1.000 6.000 12.00 5.250 -3.000 -6.000 0.0000 1.250 3.000 -6.000 0.0000 1.250 -1.000 6.000 -12.00 5.250 -2.750 1.000 3.000 3.000 -1.750 -3.000 3.000 3.000 -1.750 3.000 -15.00 21.00 -7.750 -1.000 9.000 -27.00 24.25 -2.750 1.000 0.0000 0.0000 -0.2500 -3.000 12.00 -12.00 3.750 3.000 -24.00 60.00 -44.25 -1.000 12.00 -48.00 63.75 -0.2500 Cubic basis 2.000 1.000 3.000 3.000 0.8125 -3.000 -3.000 0.0000 0.3125 3.000 -3.000 0.0000 0.3125 -1.000 3.000 -3.000 0.8125 -0.1875 1.000 1.500 0.7500 -0.2188 -3.000 1.500 0.7500 -0.2188 3.000 -7.500 5.250 -0.9688 -1.000 4.500 -6.750 3.031 -0.3438 1.000 0.0000 0.0000 -0.1875 -3.000 6.000 -3.000 0.3125 3.000 -12.00 15.00 -5.688 -1.000 6.000 -12.00 7.813 -0.1875 1.000 -1.500 0.7500 -0.1406 -3.000 10.50 -11.25 3.859 3.000 -16.50 29.25 -16.39 -1.000 7.500 -18.75 15.61 -0.01563 Cubic basis 3.000 1.000 2.000 1.333 0.2593 -3.000 -2.000 0.0000 0.1111 3.000 -2.000 0.0000 0.1111 -1.000 2.000 -1.333 0.2593 -0.03704 1.000 1.000 0.3333 -0.03395 -3.000 1.000 0.3333 -0.03395 3.000 -5.000 2.333 -0.2562 -1.000 3.000 -3.000 0.9290 -0.07099 1.000 0.0000 0.0000 -0.07099 -3.000 4.000 -1.333 0.07716 3.000 -8.000 6.667 -1.701 -1.000 4.000 -5.333 2.299 -0.07099 1.000 -1.000 0.3333 -0.07407 -3.000 7.000 -5.000 1.111 3.000 -11.00 13.00 -4.889 -1.000 5.000 -8.333 4.593 -0.03704 1.000 -2.000 1.333 -0.2994 -3.000 10.00 -10.67 3.701 3.000 -14.00 21.33 -10.52 -1.000 6.000 -12.00 7.997 -0.003086 Cubic basis 4.000 1.000 1.500 0.7500 0.1133 -3.000 -1.500 0.0000 0.05078 3.000 -1.500 0.0000 0.05078 -1.000 1.500 -0.7500 0.1133 -0.01172 1.000 0.7500 0.1875 -0.006836 -3.000 0.7500 0.1875 -0.006836 3.000 -3.750 1.313 -0.1006 -1.000 2.250 -1.688 0.3994 -0.02246 1.000 0.0000 0.0000 -0.02344 -3.000 3.000 -0.7500 0.03906 3.000 -6.000 3.750 -0.7109 -1.000 3.000 -3.000 0.9766 -0.02344 1.000 -0.7500 0.1875 -0.03809 -3.000 5.250 -2.813 0.4619 3.000 -8.250 7.313 -2.069 -1.000 3.750 -4.688 1.931 -0.02246 1.000 -1.500 0.7500 -0.1367 -3.000 7.500 -6.000 1.551 3.000 -10.50 12.00 -4.449 -1.000 4.500 -6.750 3.363 -0.01172 1.000 -2.250 1.688 -0.4229 -3.000 9.750 -10.31 3.577 3.000 -12.75 17.81 -8.142 -1.000 5.250 -9.188 5.358 -0.0009766
203
Cubic basis 5.000 1.000 1.200 0.4800 0.05920 -3.000 -1.200 0.0000 0.02720 3.000 -1.200 0.0000 0.02720 -1.000 1.200 -0.4800 0.05920 -0.004800 1.000 0.6000 0.1200 -0.001200 -3.000 0.6000 0.1200 -0.001200 3.000 -3.000 0.8400 -0.04920 -1.000 1.800 -1.080 0.2068 -0.009200 1.000 0.0000 0.0000 -0.009600 -3.000 2.400 -0.4800 0.02240 3.000 -4.800 2.400 -0.3616 -1.000 2.400 -1.920 0.5024 -0.009600 1.000 -0.6000 0.1200 -0.01760 -3.000 4.200 -1.800 0.2384 3.000 -6.600 4.680 -1.058 -1.000 3.000 -3.000 0.9904 -0.009600 1.000 -1.200 0.4800 -0.07320 -3.000 6.000 -3.840 0.7908 3.000 -8.400 7.680 -2.281 -1.000 3.600 -4.320 1.719 -0.009200 1.000 -1.800 1.080 -0.2208 -3.000 7.800 -6.600 1.827 3.000 -10.20 11.40 -4.173 -1.000 4.200 -5.880 2.739 -0.004800 1.000 -2.400 1.920 -0.5124 -3.000 9.600 -10.08 3.488 3.000 -12.00 15.84 -6.880 -1.000 4.800 -7.680 4.096 -0.0004000 Cubic basis 6.000 1.000 1.000 0.3333 0.03472 -3.000 -1.000 0.0000 0.01620 3.000 -1.000 0.0000 0.01620 -1.000 1.000 -0.3333 0.03472 -0.002315 1.000 0.5000 0.08333 0.0001929 -3.000 0.5000 0.08333 0.0001929 3.000 -2.500 0.5833 -0.02758 -1.000 1.500 -0.7500 0.1206 -0.004437 1.000 0.0000 0.0000 -0.004630 -3.000 2.000 -0.3333 0.01389 3.000 -4.000 1.667 -0.2083 -1.000 2.000 -1.333 0.2917 -0.004630 1.000 -0.5000 0.08333 -0.009259 -3.000 3.500 -1.250 0.1389 3.000 -5.500 3.250 -0.6111 -1.000 2.500 -2.083 0.5741 -0.004630 1.000 -1.000 0.3333 -0.04167 -3.000 5.000 -2.667 0.4583 3.000 -7.000 5.333 -1.319 -1.000 3.000 -3.000 0.9954 -0.004630 1.000 -1.500 0.7500 -0.1294 -3.000 6.500 -4.583 1.056 3.000 -8.500 7.917 -2.416 -1.000 3.500 -4.083 1.584 -0.004437 1.000 -2.000 1.333 -0.2986 -3.000 8.000 -7.000 2.016 3.000 -10.00 11.00 -3.984 -1.000 4.000 -5.333 2.368 -0.002315 1.000 -2.500 2.083 -0.5789 -3.000 9.500 -9.917 3.421 3.000 -11.50 14.58 -6.107 -1.000 4.500 -6.750 3.375 -0.0001929 Cubic basis 7.000 1.000 0.8571 0.2449 0.02207 -3.000 -0.8571 0.0000 0.01041 3.000 -0.8571 0.0000 0.01041 -1.000 0.8571 -0.2449 0.02207 -0.001249 1.000 0.4286 0.06122 0.0005206 -3.000 0.4286 0.06122 0.0005206 3.000 -2.143 0.4286 -0.01697 -1.000 1.286 -0.5510 0.07632 -0.002395 1.000 0.0000 0.0000 -0.002499 -3.000 1.714 -0.2449 0.009163 3.000 -3.429 1.224 -0.1308 -1.000 1.714 -0.9796 0.1841 -0.002499 1.000 -0.4286 0.06122 -0.005414 -3.000 3.000 -0.9184 0.08788 3.000 -4.714 2.388 -0.3844 -1.000 2.143 -1.531 0.3619 -0.002499 1.000 -0.8571 0.2449 -0.02582 -3.000 4.286 -1.959 0.2890 3.000 -6.000 3.918 -0.8305 -1.000 2.571
204
-2.204 0.6272 -0.002499 1.000 -1.286 0.5510 -0.08122 -3.000 5.571 -3.367 0.6651 3.000 -7.286 5.816 -1.521 -1.000 3.000 -3.000 0.9975 -0.002499 1.000 -1.714 0.9796 -0.1890 -3.000 6.857 -5.143 1.269 3.000 -8.571 8.082 -2.510 -1.000 3.429 -3.918 1.490 -0.002395 1.000 -2.143 1.531 -0.3657 -3.000 8.143 -7.286 2.153 3.000 -9.857 10.71 -3.847 -1.000 3.857 -4.959 2.124 -0.001249 1.000 -2.571 2.204 -0.6298 -3.000 9.429 -9.796 3.370 3.000 -11.14 13.71 -5.586 -1.000 4.286 -6.122 2.915 -0.0001041 Cubic basis 8.000 1.000 0.7500 0.1875 0.01489 -3.000 -0.7500 0.0000 0.007080 3.000 -0.7500 0.0000 0.007080 -1.000 0.7500 -0.1875 0.01489 -0.0007324 1.000 0.3750 0.04688 0.0005493 -3.000 0.3750 0.04688 0.0005493 3.000 -1.875 0.3281 -0.01117 -1.000 1.125 -0.4219 0.05133 -0.001404 1.000 0.0000 0.0000 -0.001465 -3.000 1.500 -0.1875 0.006348 3.000 -3.000 0.9375 -0.08740 -1.000 1.500 -0.7500 0.1235 -0.001465 1.000 -0.3750 0.04688 -0.003418 -3.000 2.625 -0.7031 0.05908 3.000 -4.125 1.828 -0.2573 -1.000 1.875 -1.172 0.2427 -0.001465 1.000 -0.7500 0.1875 -0.01709 -3.000 3.750 -1.500 0.1938 3.000 -5.250 3.000 -0.5562 -1.000 2.250 -1.688 0.4204 -0.001465 1.000 -1.125 0.4219 -0.05420 -3.000 4.875 -2.578 0.4458 3.000 -6.375 4.453 -1.019 -1.000 2.625 -2.297 0.6685 -0.001465 1.000 -1.500 0.7500 -0.1265 -3.000 6.000 -3.938 0.8501 3.000 -7.500 6.188 -1.681 -1.000 3.000 -3.000 0.9985 -0.001465 1.000 -1.875 1.172 -0.2455 -3.000 7.125 -5.578 1.442 3.000 -8.625 8.203 -2.578 -1.000 3.375 -3.797 1.422 -0.001404 1.000 -2.250 1.688 -0.4226 -3.000 8.250 -7.500 2.257 3.000 -9.750 10.50 -3.743 -1.000 3.750 -4.688 1.952 -0.0007324 1.000 -2.625 2.297 -0.6700 -3.000 9.375 -9.703 3.330 3.000 -10.88 13.08 -5.213 -1.000 4.125 -5.672 2.600 -6.104e-005 Cubic basis 9.000 1.000 0.6667 0.1481 0.01052 -3.000 -0.6667 0.0000 0.005030 3.000 -0.6667 0.0000 0.005030 -1.000 0.6667 -0.1481 0.01052 -0.0004572 1.000 0.3333 0.03704 0.0004954 -3.000 0.3333 0.03704 0.0004954 3.000 -1.667 0.2593 -0.007735 -1.000 1.000 -0.3333 0.03616 -0.0008764 1.000 0.0000 0.0000 -0.0009145 -3.000 1.333 -0.1481 0.004572 3.000 -2.667 0.7407 -0.06127 -1.000 1.333 -0.5926 0.08688 -0.0009145 1.000 -0.3333 0.03704 -0.002286 -3.000 2.333 -0.5556 0.04161 3.000 -3.667 1.444 -0.1806 -1.000 1.667 -0.9259 0.1706 -0.0009145 1.000 -0.6667 0.1481 -0.01189 -3.000 3.333 -1.185 0.1363 3.000 -4.667 2.370 -0.3905 -1.000 2.000 -1.333 0.2954 -0.0009145 1.000 -1.000 0.3333 -0.03795 -3.000 4.333 -2.037 0.3132 3.000 -5.667 3.519 -0.7156 -1.000 2.333 -1.815 0.4696 -0.0009145
205
1.000 -1.333 0.5926 -0.08871 -3.000 5.333 -3.111 0.5972 3.000 -6.667 4.889 -1.181 -1.000 2.667 -2.370 0.7014 -0.0009145 1.000 -1.667 0.9259 -0.1724 -3.000 6.333 -4.407 1.013 3.000 -7.667 6.481 -1.810 -1.000 3.000 -3.000 0.9991 -0.0009145 1.000 -2.000 1.333 -0.2972 -3.000 7.333 -5.926 1.585 3.000 -8.667 8.296 -2.629 -1.000 3.333 -3.704 1.371 -0.0008764 1.000 -2.333 1.815 -0.4710 -3.000 8.333 -7.667 2.338 3.000 -9.667 10.33 -3.662 -1.000 3.667 -4.481 1.825 -0.0004572 1.000 -2.667 2.370 -0.7024 -3.000 9.333 -9.630 3.298 3.000 -10.67 12.59 -4.933 -1.000 4.000 -5.333 2.370 -3.810e-005 Cubic basis 10.00 1.000 0.6000 0.1200 0.007700 -3.000 -0.6000 0.0000 0.003700 3.000 -0.6000 0.0000 0.003700 -1.000 0.6000 -0.1200 0.007700 -0.0003000 1.000 0.3000 0.03000 0.0004250 -3.000 0.3000 0.03000 0.0004250 3.000 -1.500 0.2100 -0.005575 -1.000 0.9000 -0.2700 0.02643 -0.0005750 1.000 0.0000 0.0000 -0.0006000 -3.000 1.200 -0.1200 0.003400 3.000 -2.400 0.6000 -0.04460 -1.000 1.200 -0.4800 0.06340 -0.0006000 1.000 -0.3000 0.03000 -0.001600 -3.000 2.100 -0.4500 0.03040 3.000 -3.300 1.170 -0.1316 -1.000 1.500 -0.7500 0.1244 -0.0006000 1.000 -0.6000 0.1200 -0.008600 -3.000 3.000 -0.9600 0.09940 3.000 -4.200 1.920 -0.2846 -1.000 1.800 -1.080 0.2154 -0.0006000 1.000 -0.9000 0.2700 -0.02760 -3.000 3.900 -1.650 0.2284 3.000 -5.100 2.850 -0.5216 -1.000 2.100 -1.470 0.3424 -0.0006000 1.000 -1.200 0.4800 -0.06460 -3.000 4.800 -2.520 0.4354 3.000 -6.000 3.960 -0.8606 -1.000 2.400 -1.920 0.5114 -0.0006000 1.000 -1.500 0.7500 -0.1256 -3.000 5.700 -3.570 0.7384 3.000 -6.900 5.250 -1.320 -1.000 2.700 -2.430 0.7284 -0.0006000 1.000 -1.800 1.080 -0.2166 -3.000 6.600 -4.800 1.155 3.000 -7.800 6.720 -1.917 -1.000 3.000 -3.000 0.9994 -0.0006000 1.000 -2.100 1.470 -0.3436 -3.000 7.500 -6.210 1.704 3.000 -8.700 8.370 -2.670 -1.000 3.300 -3.630 1.330 -0.0005750 1.000 -2.400 1.920 -0.5123 -3.000 8.400 -7.800 2.404 3.000 -9.600 10.20 -3.596 -1.000 3.600 -4.320 1.728 -0.0003000 1.000 -2.700 2.430 -0.7290 -3.000 9.300 -9.570 3.271 3.000 -10.50 12.21 -4.715 -1.000 3.900 -5.070 2.197 -2.500e-005 Cubic basis 11.00 1.000 0.5455 0.09917 0.005806 -3.000 -0.5455 0.0000 0.002800 3.000 -0.5455 0.0000 0.002800 -1.000 0.5455 -0.09917 0.005806 -0.0002049 1.000 0.2727 0.02479 0.0003586 -3.000 0.2727 0.02479 0.0003586 3.000 -1.364 0.1736 -0.004149 -1.000 0.8182 -0.2231 0.01989 -0.0003927 1.000 0.0000 0.0000 -0.0004098 -3.000 1.091 -0.09917 0.002595 3.000 -2.182 0.4959 -0.03347 -1.000 1.091 -0.3967 0.04767 -0.0004098 1.000 -0.2727 0.02479 -0.001161 -3.000 1.909 -0.3719 0.02288 3.000 -3.000 0.9669 -0.09883 -1.000 1.364 -0.6198 0.09350 -0.0004098 1.000 -0.5455 0.09917 -0.006420 -3.000 2.727 -0.7934 0.07472 3.000 -3.818 1.587 -0.2138 -1.000 1.636 -0.8926 0.1619 -0.0004098 1.000 -0.8182 0.2231 -0.02070 -3.000 3.545 -1.364 0.1716 3.000 -4.636 2.355 -0.3918 -1.000 1.909 -1.215 0.2573 -0.0004098 1.000 -1.091 0.3967 -0.04849 -3.000 4.364 -2.083 0.3272 3.000 -5.455 3.273 -0.6465 -1.000 2.182 -1.587 0.3843 -0.0004098 1.000 -1.364 0.6198 -0.09432 -3.000 5.182 -2.950 0.5548 3.000 -6.273 4.339 -0.9914 -1.000 2.455 -2.008 0.5473 -0.0004098 1.000 -1.636 0.8926 -0.1627 -3.000 6.000 -3.967 0.8681 3.000 -7.091 5.554 -1.440 -1.000 2.727 -2.479 0.7509 -0.0004098

206
1.000 -1.909 1.215 -0.2581 -3.000 6.818 -5.132 1.281 3.000 -7.909 6.917 -2.006 -1.000 3.000 -3.000 0.9996 -0.0004098 1.000 -2.182 1.587 -0.3851 -3.000 7.636 -6.446 1.806 3.000 -8.727 8.430 -2.702 -1.000 3.273 -3.570 1.298 -0.0003927 1.000 -2.455 2.008 -0.5479 -3.000 8.455 -7.909 2.457 3.000 -9.545 10.09 -3.543 -1.000 3.545 -4.190 1.650 -0.0002049 1.000 -2.727 2.479 -0.7513 -3.000 9.273 -9.521 3.249 3.000 -10.36 11.90 -4.541 -1.000 3.818 -4.860 2.062 -1.708e-005 Cubic basis 12.00 1.000 0.5000 0.08333 0.004485 -3.000 -0.5000 0.0000 0.002170 3.000 -0.5000 0.0000 0.002170 -1.000 0.5000 -0.08333 0.004485 -0.0001447 1.000 0.2500 0.02083 0.0003014 -3.000 0.2500 0.02083 0.0003014 3.000 -1.250 0.1458 -0.003171 -1.000 0.7500 -0.1875 0.01535 -0.0002773 1.000 0.0000 0.0000 -0.0002894 -3.000 1.000 -0.08333 0.002025 3.000 -2.000 0.4167 -0.02575 -1.000 1.000 -0.3333 0.03675 -0.0002894 1.000 -0.2500 0.02083 -0.0008681 -3.000 1.750 -0.3125 0.01765 3.000 -2.750 0.8125 -0.07610 -1.000 1.250 -0.5208 0.07205 -0.0002894 1.000 -0.5000 0.08333 -0.004919 -3.000 2.500 -0.6667 0.05758 3.000 -3.500 1.333 -0.1646 -1.000 1.500 -0.7500 0.1247 -0.0002894 1.000 -0.7500 0.1875 -0.01591 -3.000 3.250 -1.146 0.1322 3.000 -4.250 1.979 -0.3018 -1.000 1.750 -1.021 0.1982 -0.0002894 1.000 -1.000 0.3333 -0.03733 -3.000 4.000 -1.750 0.2520 3.000 -5.000 2.750 -0.4980 -1.000 2.000 -1.333 0.2960 -0.0002894 1.000 -1.250 0.5208 -0.07263 -3.000 4.750 -2.479 0.4274 3.000 -5.750 3.646 -0.7636 -1.000 2.250 -1.688 0.4216 -0.0002894 1.000 -1.500 0.7500 -0.1253 -3.000 5.500 -3.333 0.6687 3.000 -6.500 4.667 -1.109 -1.000 2.500 -2.083 0.5784 -0.0002894 1.000 -1.750 1.021 -0.1988 -3.000 6.250 -4.313 0.9864 3.000 -7.250 5.813 -1.545 -1.000 2.750 -2.521 0.7700 -0.0002894 1.000 -2.000 1.333 -0.2966 -3.000 7.000 -5.417 1.391 3.000 -8.000 7.083 -2.081 -1.000 3.000 -3.000 0.9997 -0.0002894 1.000 -2.250 1.688 -0.4222 -3.000 7.750 -6.646 1.893 3.000 -8.750 8.479 -2.729 -1.000 3.250 -3.521 1.271 -0.0002773 1.000 -2.500 2.083 -0.5788 -3.000 8.500 -8.000 2.502 3.000 -9.500 10.00 -3.498 -1.000 3.500 -4.083 1.588 -0.0001447 1.000 -2.750 2.521 -0.7703 -3.000 9.250 -9.479 3.230 3.000 -10.25 11.65 -4.399 -1.000 3.750 -4.688 1.953 -1.206e-005 Cubic basis 13.00 1.000 0.4615 0.07101 0.003536 -3.000 -0.4615 0.0000 0.001716 3.000 -0.4615 0.0000 0.001716 -1.000 0.4615 -0.07101 0.003536 -0.0001050 1.000 0.2308 0.01775 0.0002538 -3.000 0.2308 0.01775 0.0002538 3.000 -1.154 0.1243 -0.002477 -1.000 0.6923 -0.1598 0.01209 -0.0002013 1.000 0.0000 0.0000 -0.0002101 -3.000 0.9231 -0.07101 0.001611 3.000 -1.846 0.3550 -0.02024 -1.000 0.9231 -0.2840 0.02892 -0.0002101 1.000 -0.2308 0.01775 -0.0006652 -3.000 1.615 -0.2663 0.01390 3.000 -2.538 0.6923 -0.05984 -1.000 1.154 -0.4438 0.05669 -0.0002101 1.000 -0.4615 0.07101 -0.003851 -3.000 2.308 -0.5680 0.04531 3.000 -3.231 1.136 -0.1295 -1.000 1.385 -0.6391 0.09811 -0.0002101 1.000 -0.6923 0.1598 -0.01250 -3.000 3.000 -0.9763 0.1040 3.000 -3.923 1.686 -0.2374 -1.000 1.615 -0.8698 0.1559 -0.0002101 1.000 -0.9231 0.2840 -0.02934 -3.000 3.692 -1.491 0.1982 3.000 -4.615 2.343 -0.3917 -1.000 1.846 -1.136 0.2328 -0.0002101 1.000 -1.154 0.4438 -0.05711 -3.000 4.385 -2.112 0.3362 3.000 -5.308 3.107 -0.6006 -1.000 2.077 -1.438 0.3316 -0.0002101 1.000 -1.385 0.6391 -0.09853 -3.000 5.077 -2.840 0.5260 3.000 -6.000 3.976 -0.8723 -1.000 2.308 -1.775 0.4550 -0.0002101 1.000 -1.615 0.8698 -0.1563 -3.000 5.769 -3.675 0.7758 3.000 -6.692 4.953 -1.215 -1.000 2.538 -2.148 0.6056 -0.0002101 1.000 -1.846 1.136 -0.2333 -3.000 6.462 -4.615 1.094 3.000 -7.385 6.036 -1.637 -1.000 2.769 -2.556 0.7863 -0.0002101 1.000 -2.077 1.438 -0.3320 -3.000 7.154 -5.663 1.489 3.000 -8.077 7.225 -2.146 -1.000 3.000 -3.000 0.9998 -0.0002101

207
1.000 -2.308 1.775 -0.4554 -3.000 7.846 -6.817 1.968 3.000 -8.769 8.521 -2.751 -1.000 3.231 -3.479 1.249 -0.0002013 1.000 -2.538 2.148 -0.6059 -3.000 8.538 -8.077 2.540 3.000 -9.462 9.923 -3.460 -1.000 3.462 -3.994 1.536 -0.0001050 1.000 -2.769 2.556 -0.7865 -3.000 9.231 -9.444 3.213 3.000 -10.15 11.43 -4.280 -1.000 3.692 -4.544 1.864 -8.753e-006 Cubic basis 14.00 1.000 0.4286 0.06122 0.002837 -3.000 -0.4286 0.0000 0.001380 3.000 -0.4286 0.0000 0.001380 -1.000 0.4286 -0.06122 0.002837 -7.809e-005 1.000 0.2143 0.01531 0.0002148 -3.000 0.2143 0.01531 0.0002148 3.000 -1.071 0.1071 -0.001972 -1.000 0.6429 -0.1378 0.009690 -0.0001497 1.000 0.0000 0.0000 -0.0001562 -3.000 0.8571 -0.06122 0.001302 3.000 -1.714 0.3061 -0.01619 -1.000 0.8571 -0.2449 0.02317 -0.0001562 1.000 -0.2143 0.01531 -0.0005206 -3.000 1.500 -0.2296 0.01114 3.000 -2.357 0.5969 -0.04790 -1.000 1.071 -0.3827 0.04540 -0.0001562 1.000 -0.4286 0.06122 -0.003072 -3.000 2.143 -0.4898 0.03629 3.000 -3.000 0.9796 -0.1037 -1.000 1.286 -0.5510 0.07856 -0.0001562 1.000 -0.6429 0.1378 -0.009996 -3.000 2.786 -0.8418 0.08330 3.000 -3.643 1.454 -0.1900 -1.000 1.500 -0.7500 0.1248 -0.0001562 1.000 -0.8571 0.2449 -0.02348 -3.000 3.429 -1.286 0.1587 3.000 -4.286 2.020 -0.3136 -1.000 1.714 -0.9796 0.1864 -0.0001562 1.000 -1.071 0.3827 -0.04571 -3.000 4.071 -1.821 0.2692 3.000 -4.929 2.679 -0.4808 -1.000 1.929 -1.240 0.2655 -0.0001562 1.000 -1.286 0.5510 -0.07887 -3.000 4.714 -2.449 0.4211 3.000 -5.571 3.429 -0.6984 -1.000 2.143 -1.531 0.3643 -0.0001562 1.000 -1.500 0.7500 -0.1252 -3.000 5.357 -3.168 0.6212 3.000 -6.214 4.270 -0.9728 -1.000 2.357 -1.852 0.4849 -0.0001562 1.000 -1.714 0.9796 -0.1867 -3.000 6.000 -3.980 0.8759 3.000 -6.857 5.204 -1.311 -1.000 2.571 -2.204 0.6296 -0.0001562 1.000 -1.929 1.240 -0.2658 -3.000 6.643 -4.883 1.192 3.000 -7.500 6.230 -1.718 -1.000 2.786 -2.587 0.8005 -0.0001562 1.000 -2.143 1.531 -0.3646 -3.000 7.286 -5.878 1.576 3.000 -8.143 7.347 -2.203 -1.000 3.000 -3.000 0.9998 -0.0001562 1.000 -2.357 1.852 -0.4852 -3.000 7.929 -6.964 2.034 3.000 -8.786 8.556 -2.770 -1.000 3.214 -3.444 1.230 -0.0001497 1.000 -2.571 2.204 -0.6298 -3.000 8.571 -8.143 2.573 3.000 -9.429 9.857 -3.427 -1.000 3.429 -3.918 1.493 -7.809e-005 1.000 -2.786 2.587 -0.8007 -3.000 9.214 -9.413 3.199 3.000 -10.07 11.25 -4.180 -1.000 3.643 -4.423 1.790 -6.508e-006 Cubic basis 15.00 1.000 0.4000 0.05333 0.002311 -3.000 -0.4000 0.0000 0.001126 3.000 -0.4000 0.0000 0.001126 -1.000 0.4000 -0.05333 0.002311 -5.926e-005 1.000 0.2000 0.01333 0.0001827 -3.000 0.2000 0.01333 0.0001827 3.000 -1.000 0.09333 -0.001595 -1.000 0.6000 -0.1200 0.007886 -0.0001136 1.000 0.0000 0.0000 -0.0001185 -3.000 0.8000 -0.05333 0.001067 3.000 -1.600 0.2667 -0.01316 -1.000 0.8000 -0.2133 0.01884 -0.0001185 1.000 -0.2000 0.01333 -0.0004148 -3.000 1.400 -0.2000 0.009067 3.000 -2.200 0.5200 -0.03893 -1.000 1.000 -0.3333 0.03692 -0.0001185 1.000 -0.4000 0.05333 -0.002489 -3.000 2.000 -0.4267 0.02951 3.000 -2.800 0.8533 -0.08427 -1.000 1.200 -0.4800 0.06388 -0.0001185 1.000 -0.6000 0.1200 -0.008119 -3.000 2.600 -0.7333 0.06773 3.000 -3.400 1.267 -0.1545 -1.000 1.400 -0.6533 0.1015 -0.0001185 1.000 -0.8000 0.2133 -0.01908 -3.000 3.200 -1.120 0.1291 3.000 -4.000 1.760 -0.2549 -1.000 1.600 -0.8533 0.1516 -0.0001185 1.000 -1.000 0.3333 -0.03716 -3.000 3.800 -1.587 0.2188 3.000 -4.600 2.333 -0.3909 -1.000 1.800 -1.080 0.2159 -0.0001185 1.000 -1.200 0.4800 -0.06412 -3.000 4.400 -2.133 0.3424 3.000 -5.200 2.987 -0.5678 -1.000 2.000 -1.333 0.2962 -0.0001185 1.000 -1.400 0.6533 -0.1017 -3.000 5.000 -2.760 0.5051 3.000 -5.800 3.720 -0.7909 -1.000 2.200 -1.613 0.3943 -0.0001185 1.000 -1.600 0.8533 -0.1518 -3.000 5.600 -3.467 0.7122 3.000 -6.400 4.533 -1.066 -1.000 2.400 -1.920 0.5119 -0.0001185

208
1.000 -1.800 1.080 -0.2161 -3.000 6.200 -4.253 0.9691 3.000 -7.000 5.427 -1.397 -1.000 2.600 -2.253 0.6508 -0.0001185 1.000 -2.000 1.333 -0.2964 -3.000 6.800 -5.120 1.281 3.000 -7.600 6.400 -1.791 -1.000 2.800 -2.613 0.8129 -0.0001185 1.000 -2.200 1.613 -0.3945 -3.000 7.400 -6.067 1.654 3.000 -8.200 7.453 -2.252 -1.000 3.000 -3.000 0.9999 -0.0001185 1.000 -2.400 1.920 -0.5121 -3.000 8.000 -7.093 2.092 3.000 -8.800 8.587 -2.786 -1.000 3.200 -3.413 1.214 -0.0001136 1.000 -2.600 2.253 -0.6510 -3.000 8.600 -8.200 2.601 3.000 -9.400 9.800 -3.399 -1.000 3.400 -3.853 1.456 -5.926e-005 1.000 -2.800 2.613 -0.8130 -3.000 9.200 -9.387 3.187 3.000 -10.00 11.09 -4.095 -1.000 3.600 -4.320 1.728 -4.938e-006 Cubic basis 16.00 1.000 0.3750 0.04688 0.001907 -3.000 -0.3750 0.0000 0.0009308 3.000 -0.3750 0.0000 0.0009308 -1.000 0.3750 -0.04688 0.001907 -4.578e-005 1.000 0.1875 0.01172 0.0001564 -3.000 0.1875 0.01172 0.0001564 3.000 -0.9375 0.08203 -0.001308 -1.000 0.5625 -0.1055 0.006504 -8.774e-005 1.000 0.0000 0.0000 -9.155e-005 -3.000 0.7500 -0.04688 0.0008850 3.000 -1.500 0.2344 -0.01083 -1.000 0.7500 -0.1875 0.01553 -9.155e-005 1.000 -0.1875 0.01172 -0.0003357 -3.000 1.313 -0.1758 0.007477 3.000 -2.063 0.4570 -0.03207 -1.000 0.9375 -0.2930 0.03043 -9.155e-005 1.000 -0.3750 0.04688 -0.002045 -3.000 1.875 -0.3750 0.02432 3.000 -2.625 0.7500 -0.06943 -1.000 1.125 -0.4219 0.05264 -9.155e-005 1.000 -0.5625 0.1055 -0.006683 -3.000 2.438 -0.6445 0.05582 3.000 -3.188 1.113 -0.1273 -1.000 1.313 -0.5742 0.08365 -9.155e-005 1.000 -0.7500 0.1875 -0.01572 -3.000 3.000 -0.9844 0.1064 3.000 -3.750 1.547 -0.2101 -1.000 1.500 -0.7500 0.1249 -9.155e-005 1.000 -0.9375 0.2930 -0.03061 -3.000 3.563 -1.395 0.1803 3.000 -4.313 2.051 -0.3221 -1.000 1.688 -0.9492 0.1779 -9.155e-005 1.000 -1.125 0.4219 -0.05283 -3.000 4.125 -1.875 0.2821 3.000 -4.875 2.625 -0.4679 -1.000 1.875 -1.172 0.2440 -9.155e-005 1.000 -1.313 0.5742 -0.08383 -3.000 4.688 -2.426 0.4162 3.000 -5.438 3.270 -0.6517 -1.000 2.063 -1.418 0.3249 -9.155e-005 1.000 -1.500 0.7500 -0.1251 -3.000 5.250 -3.047 0.5868 3.000 -6.000 3.984 -0.8780 -1.000 2.250 -1.688 0.4218 -9.155e-005 1.000 -1.688 0.9492 -0.1781 -3.000 5.813 -3.738 0.7985 3.000 -6.563 4.770 -1.151 -1.000 2.438 -1.980 0.5363 -9.155e-005 1.000 -1.875 1.172 -0.2442 -3.000 6.375 -4.500 1.056 3.000 -7.125 5.625 -1.476 -1.000 2.625 -2.297 0.6698 -9.155e-005 1.000 -2.063 1.418 -0.3250 -3.000 6.938 -5.332 1.362 3.000 -7.688 6.551 -1.856 -1.000 2.813 -2.637 0.8239 -9.155e-005 1.000 -2.250 1.688 -0.4220 -3.000 7.500 -6.234 1.724 3.000 -8.250 7.547 -2.296 -1.000 3.000 -3.000 0.9999 -9.155e-005 1.000 -2.438 1.980 -0.5365 -3.000 8.063 -7.207 2.143 3.000 -8.813 8.613 -2.801 -1.000 3.188 -3.387 1.199 -8.774e-005 1.000 -2.625 2.297 -0.6700 -3.000 8.625 -8.250 2.626 3.000 -9.375 9.750 -3.374 -1.000 3.375 -3.797 1.424 -4.578e-005 1.000 -2.813 2.637 -0.8240 -3.000 9.188 -9.363 3.176 3.000 -9.938 10.96 -4.021 -1.000 3.563 -4.230 1.675 -3.815e-006 Cubic basis 17.00 1.000 0.3529 0.04152 0.001592 -3.000 -0.3529 0.0000 0.0007782 3.000 -0.3529 0.0000 0.0007782 -1.000 0.3529 -0.04152 0.001592 -3.592e-005 1.000 0.1765 0.01038 0.0001347 -3.000 0.1765 0.01038 0.0001347 3.000 -0.8824 0.07266 -0.001087 -1.000 0.5294 -0.09343 0.005427 -6.884e-005 1.000 0.0000 0.0000 -7.184e-005 -3.000 0.7059 -0.04152 0.0007423 3.000 -1.412 0.2076 -0.009028 -1.000 0.7059 -0.1661 0.01295 -7.184e-005 1.000 -0.1765 0.01038 -0.0002754 -3.000 1.235 -0.1557 0.006238 3.000 -1.941 0.4048 -0.02674 -1.000 0.8824 -0.2595 0.02537 -7.184e-005 1.000 -0.3529 0.04152 -0.001700 -3.000 1.765 -0.3322 0.02028 3.000 -2.471 0.6644 -0.05788 -1.000 1.059 -0.3737 0.04389 -7.184e-005

209
1.000 -0.5294 0.09343 -0.005567 -3.000 2.294 -0.5709 0.04654 3.000 -3.000 0.9862 -0.1061 -1.000 1.235 -0.5087 0.06974 -7.184e-005 1.000 -0.7059 0.1661 -0.01310 -3.000 2.824 -0.8720 0.08867 3.000 -3.529 1.370 -0.1751 -1.000 1.412 -0.6644 0.1041 -7.184e-005 1.000 -0.8824 0.2595 -0.02551 -3.000 3.353 -1.235 0.1503 3.000 -4.059 1.817 -0.2685 -1.000 1.588 -0.8408 0.1483 -7.184e-005 1.000 -1.059 0.3737 -0.04404 -3.000 3.882 -1.661 0.2352 3.000 -4.588 2.325 -0.3901 -1.000 1.765 -1.038 0.2035 -7.184e-005 1.000 -1.235 0.5087 -0.06989 -3.000 4.412 -2.149 0.3470 3.000 -5.118 2.896 -0.5433 -1.000 1.941 -1.256 0.2708 -7.184e-005 1.000 -1.412 0.6644 -0.1043 -3.000 4.941 -2.699 0.4892 3.000 -5.647 3.529 -0.7320 -1.000 2.118 -1.495 0.3516 -7.184e-005 1.000 -1.588 0.8408 -0.1485 -3.000 5.471 -3.311 0.6657 3.000 -6.176 4.225 -0.9598 -1.000 2.294 -1.754 0.4471 -7.184e-005 1.000 -1.765 1.038 -0.2036 -3.000 6.000 -3.986 0.8800 3.000 -6.706 4.983 -1.230 -1.000 2.471 -2.035 0.5584 -7.184e-005 1.000 -1.941 1.256 -0.2710 -3.000 6.529 -4.723 1.136 3.000 -7.235 5.803 -1.547 -1.000 2.647 -2.336 0.6869 -7.184e-005 1.000 -2.118 1.495 -0.3518 -3.000 7.059 -5.522 1.437 3.000 -7.765 6.685 -1.914 -1.000 2.824 -2.657 0.8336 -7.184e-005 1.000 -2.294 1.754 -0.4473 -3.000 7.588 -6.384 1.787 3.000 -8.294 7.630 -2.335 -1.000 3.000 -3.000 0.9999 -7.184e-005 1.000 -2.471 2.035 -0.5586 -3.000 8.118 -7.308 2.189 3.000 -8.824 8.637 -2.813 -1.000 3.176 -3.363 1.187 -6.884e-005 1.000 -2.647 2.336 -0.6870 -3.000 8.647 -8.294 2.648 3.000 -9.353 9.706 -3.352 -1.000 3.353 -3.747 1.396 -3.592e-005 1.000 -2.824 2.657 -0.8337 -3.000 9.176 -9.343 3.166 3.000 -9.882 10.84 -3.956 -1.000 3.529 -4.152 1.628 -2.993e-006 Cubic basis 18.00 1.000 0.3333 0.03704 0.001343 -3.000 -0.3333 0.0000 0.0006573 3.000 -0.3333 0.0000 0.0006573 -1.000 0.3333 -0.03704 0.001343 -2.858e-005 1.000 0.1667 0.009259 0.0001167 -3.000 0.1667 0.009259 0.0001167 3.000 -0.8333 0.06481 -0.0009121 -1.000 0.5000 -0.08333 0.004575 -5.477e-005 1.000 0.0000 0.0000 -5.716e-005 -3.000 0.6667 -0.03704 0.0006287 3.000 -1.333 0.1852 -0.007602 -1.000 0.6667 -0.1481 0.01092 -5.716e-005 1.000 -0.1667 0.009259 -0.0002286 -3.000 1.167 -0.1389 0.005258 3.000 -1.833 0.3611 -0.02252 -1.000 0.8333 -0.2315 0.02138 -5.716e-005 1.000 -0.3333 0.03704 -0.001429 -3.000 1.667 -0.2963 0.01709 3.000 -2.333 0.5926 -0.04875 -1.000 1.000 -0.3333 0.03698 -5.716e-005 1.000 -0.5000 0.08333 -0.004687 -3.000 2.167 -0.5093 0.03921 3.000 -2.833 0.8796 -0.08939 -1.000 1.167 -0.4537 0.05876 -5.716e-005 1.000 -0.6667 0.1481 -0.01103 -3.000 2.667 -0.7778 0.07470 3.000 -3.333 1.222 -0.1475 -1.000 1.333 -0.5926 0.08773 -5.716e-005 1.000 -0.8333 0.2315 -0.02149 -3.000 3.167 -1.102 0.1267 3.000 -3.833 1.620 -0.2262 -1.000 1.500 -0.7500 0.1249 -5.716e-005 1.000 -1.000 0.3333 -0.03709 -3.000 3.667 -1.481 0.1982 3.000 -4.333 2.074 -0.3286 -1.000 1.667 -0.9259 0.1714 -5.716e-005 1.000 -1.167 0.4537 -0.05887 -3.000 4.167 -1.917 0.2923 3.000 -4.833 2.583 -0.4577 -1.000 1.833 -1.120 0.2282 -5.716e-005 1.000 -1.333 0.5926 -0.08785 -3.000 4.667 -2.407 0.4122 3.000 -5.333 3.148 -0.6167 -1.000 2.000 -1.333 0.2962 -5.716e-005 1.000 -1.500 0.7500 -0.1251 -3.000 5.167 -2.954 0.5608 3.000 -5.833 3.769 -0.8085 -1.000 2.167 -1.565 0.3767 -5.716e-005 1.000 -1.667 0.9259 -0.1715 -3.000 5.667 -3.556 0.7414 3.000 -6.333 4.444 -1.036 -1.000 2.333 -1.815 0.4705 -5.716e-005 1.000 -1.833 1.120 -0.2283 -3.000 6.167 -4.213 0.9569 3.000 -6.833 5.176 -1.303 -1.000 2.500 -2.083 0.5786 -5.716e-005 1.000 -2.000 1.333 -0.2964 -3.000 6.667 -4.926 1.211 3.000 -7.333 5.963 -1.613 -1.000 2.667 -2.370 0.7023 -5.716e-005 1.000 -2.167 1.565 -0.3768 -3.000 7.167 -5.694 1.505 3.000 -7.833 6.806 -1.967 -1.000 2.833 -2.676 0.8424 -5.716e-005 1.000 -2.333 1.815 -0.4706 -3.000 7.667 -6.519 1.844 3.000 -8.333 7.704 -2.370 -1.000 3.000 -3.000 0.9999 -5.716e-005

210
1.000 -2.500 2.083 -0.5788 -3.000 8.167 -7.398 2.231 3.000 -8.833 8.657 -2.824 -1.000 3.167 -3.343 1.176 -5.477e-005 1.000 -2.667 2.370 -0.7024 -3.000 8.667 -8.333 2.667 3.000 -9.333 9.667 -3.333 -1.000 3.333 -3.704 1.372 -2.858e-005 1.000 -2.833 2.676 -0.8424 -3.000 9.167 -9.324 3.158 3.000 -9.833 10.73 -3.899 -1.000 3.500 -4.083 1.588 -2.381e-006 Cubic basis 19.00 1.000 0.3158 0.03324 0.001143 -3.000 -0.3158 0.0000 0.0005602 3.000 -0.3158 0.0000 0.0005602 -1.000 0.3158 -0.03324 0.001143 -2.302e-005 1.000 0.1579 0.008310 0.0001017 -3.000 0.1579 0.008310 0.0001017 3.000 -0.7895 0.05817 -0.0007731 -1.000 0.4737 -0.07479 0.003892 -4.412e-005 1.000 0.0000 0.0000 -4.604e-005 -3.000 0.6316 -0.03324 0.0005371 3.000 -1.263 0.1662 -0.006461 -1.000 0.6316 -0.1330 0.009285 -4.604e-005 1.000 -0.1579 0.008310 -0.0001918 -3.000 1.105 -0.1247 0.004474 3.000 -1.737 0.3241 -0.01915 -1.000 0.7895 -0.2078 0.01818 -4.604e-005 1.000 -0.3158 0.03324 -0.001212 -3.000 1.579 -0.2659 0.01453 3.000 -2.211 0.5319 -0.04145 -1.000 0.9474 -0.2992 0.03145 -4.604e-005 1.000 -0.4737 0.07479 -0.003982 -3.000 2.053 -0.4571 0.03334 3.000 -2.684 0.7895 -0.07600 -1.000 1.105 -0.4072 0.04996 -4.604e-005 1.000 -0.6316 0.1330 -0.009377 -3.000 2.526 -0.6981 0.06352 3.000 -3.158 1.097 -0.1254 -1.000 1.263 -0.5319 0.07460 -4.604e-005 1.000 -0.7895 0.2078 -0.01827 -3.000 3.000 -0.9889 0.1077 3.000 -3.632 1.454 -0.1923 -1.000 1.421 -0.6731 0.1062 -4.604e-005 1.000 -0.9474 0.2992 -0.03154 -3.000 3.474 -1.330 0.1685 3.000 -4.105 1.861 -0.2794 -1.000 1.579 -0.8310 0.1457 -4.604e-005 1.000 -1.105 0.4072 -0.05005 -3.000 3.947 -1.720 0.2485 3.000 -4.579 2.319 -0.3892 -1.000 1.737 -1.006 0.1940 -4.604e-005 1.000 -1.263 0.5319 -0.07469 -3.000 4.421 -2.161 0.3504 3.000 -5.053 2.825 -0.5243 -1.000 1.895 -1.197 0.2519 -4.604e-005 1.000 -1.421 0.6731 -0.1063 -3.000 4.895 -2.651 0.4768 3.000 -5.526 3.382 -0.6875 -1.000 2.053 -1.404 0.3203 -4.604e-005 1.000 -1.579 0.8310 -0.1458 -3.000 5.368 -3.191 0.6304 3.000 -6.000 3.989 -0.8812 -1.000 2.211 -1.629 0.4000 -4.604e-005 1.000 -1.737 1.006 -0.1941 -3.000 5.842 -3.781 0.8136 3.000 -6.474 4.645 -1.108 -1.000 2.368 -1.870 0.4920 -4.604e-005 1.000 -1.895 1.197 -0.2520 -3.000 6.316 -4.421 1.029 3.000 -6.947 5.352 -1.371 -1.000 2.526 -2.127 0.5971 -4.604e-005 1.000 -2.053 1.404 -0.3204 -3.000 6.789 -5.111 1.280 3.000 -7.421 6.108 -1.672 -1.000 2.684 -2.402 0.7162 -4.604e-005 1.000 -2.211 1.629 -0.4001 -3.000 7.263 -5.850 1.568 3.000 -7.895 6.914 -2.015 -1.000 2.842 -2.693 0.8502 -4.604e-005 1.000 -2.368 1.870 -0.4921 -3.000 7.737 -6.640 1.897 3.000 -8.368 7.770 -2.401 -1.000 3.000 -3.000 1.000 -4.604e-005 1.000 -2.526 2.127 -0.5972 -3.000 8.211 -7.479 2.268 3.000 -8.842 8.676 -2.834 -1.000 3.158 -3.324 1.166 -4.412e-005 1.000 -2.684 2.402 -0.7163 -3.000 8.684 -8.368 2.685 3.000 -9.316 9.632 -3.315 -1.000 3.316 -3.665 1.350 -2.302e-005 1.000 -2.842 2.693 -0.8503 -3.000 9.158 -9.307 3.150 3.000 -9.789 10.64 -3.848 -1.000 3.474 -4.022 1.552 -1.918e-006 Cubic basis 20.00 1.000 0.3000 0.03000 0.0009812 -3.000 -0.3000 0.0000 0.0004813 3.000 -0.3000 0.0000 0.0004813 -1.000 0.3000 -0.03000 0.0009812 -1.875e-005 1.000 0.1500 0.007500 8.906e-005 -3.000 0.1500 0.007500 8.906e-005 3.000 -0.7500 0.05250 -0.0006609 -1.000 0.4500 -0.06750 0.003339 -3.594e-005 1.000 0.0000 0.0000 -3.750e-005 -3.000 0.6000 -0.03000 0.0004625 3.000 -1.200 0.1500 -0.005537 -1.000 0.6000 -0.1200 0.007963 -3.750e-005 1.000 -0.1500 0.007500 -0.0001625 -3.000 1.050 -0.1125 0.003837 3.000 -1.650 0.2925 -0.01641 -1.000 0.7500 -0.1875 0.01559 -3.750e-005 1.000 -0.3000 0.03000 -0.001038 -3.000 1.500 -0.2400 0.01246 3.000 -2.100 0.4800 -0.03554 -1.000 0.9000 -0.2700 0.02696 -3.750e-005

211
1.000 -0.4500 0.06750 -0.003413 -3.000 1.950 -0.4125 0.02859 3.000 -2.550 0.7125 -0.06516 -1.000 1.050 -0.3675 0.04284 -3.750e-005 1.000 -0.6000 0.1200 -0.008037 -3.000 2.400 -0.6300 0.05446 3.000 -3.000 0.9900 -0.1075 -1.000 1.200 -0.4800 0.06396 -3.750e-005 1.000 -0.7500 0.1875 -0.01566 -3.000 2.850 -0.8925 0.09234 3.000 -3.450 1.313 -0.1649 -1.000 1.350 -0.6075 0.09109 -3.750e-005 1.000 -0.9000 0.2700 -0.02704 -3.000 3.300 -1.200 0.1445 3.000 -3.900 1.680 -0.2395 -1.000 1.500 -0.7500 0.1250 -3.750e-005 1.000 -1.050 0.3675 -0.04291 -3.000 3.750 -1.553 0.2131 3.000 -4.350 2.092 -0.3337 -1.000 1.650 -0.9075 0.1663 -3.750e-005 1.000 -1.200 0.4800 -0.06404 -3.000 4.200 -1.950 0.3005 3.000 -4.800 2.550 -0.4495 -1.000 1.800 -1.080 0.2160 -3.750e-005 1.000 -1.350 0.6075 -0.09116 -3.000 4.650 -2.393 0.4088 3.000 -5.250 3.053 -0.5894 -1.000 1.950 -1.268 0.2746 -3.750e-005 1.000 -1.500 0.7500 -0.1250 -3.000 5.100 -2.880 0.5405 3.000 -5.700 3.600 -0.7555 -1.000 2.100 -1.470 0.3430 -3.750e-005 1.000 -1.650 0.9075 -0.1664 -3.000 5.550 -3.413 0.6976 3.000 -6.150 4.192 -0.9502 -1.000 2.250 -1.688 0.4218 -3.750e-005 1.000 -1.800 1.080 -0.2160 -3.000 6.000 -3.990 0.8825 3.000 -6.600 4.830 -1.176 -1.000 2.400 -1.920 0.5120 -3.750e-005 1.000 -1.950 1.268 -0.2747 -3.000 6.450 -4.612 1.097 3.000 -7.050 5.513 -1.434 -1.000 2.550 -2.168 0.6141 -3.750e-005 1.000 -2.100 1.470 -0.3430 -3.000 6.900 -5.280 1.344 3.000 -7.500 6.240 -1.728 -1.000 2.700 -2.430 0.7290 -3.750e-005 1.000 -2.250 1.688 -0.4219 -3.000 7.350 -5.992 1.626 3.000 -7.950 7.013 -2.059 -1.000 2.850 -2.708 0.8573 -3.750e-005 1.000 -2.400 1.920 -0.5120 -3.000 7.800 -6.750 1.944 3.000 -8.400 7.830 -2.430 -1.000 3.000 -3.000 1.000 -3.750e-005 1.000 -2.550 2.168 -0.6142 -3.000 8.250 -7.553 2.302 3.000 -8.850 8.693 -2.842 -1.000 3.150 -3.308 1.158 -3.594e-005 1.000 -2.700 2.430 -0.7290 -3.000 8.700 -8.400 2.700 3.000 -9.300 9.600 -3.300 -1.000 3.300 -3.630 1.331 -1.875e-005 1.000 -2.850 2.708 -0.8574 -3.000 9.150 -9.293 3.143 3.000 -9.750 10.55 -3.803 -1.000 3.450 -3.967 1.521 -1.563e-006 Cubic basis 21.00 1.000 0.2857 0.02721 0.0008484 -3.000 -0.2857 0.0000 0.0004165 3.000 -0.2857 0.0000 0.0004165 -1.000 0.2857 -0.02721 0.0008484 -1.543e-005 1.000 0.1429 0.006803 7.841e-005 -3.000 0.1429 0.006803 7.841e-005 3.000 -0.7143 0.04762 -0.0005695 -1.000 0.4286 -0.06122 0.002886 -2.957e-005 1.000 0.0000 0.0000 -3.085e-005 -3.000 0.5714 -0.02721 0.0004011 3.000 -1.143 0.1361 -0.004782 -1.000 0.5714 -0.1088 0.006880 -3.085e-005 1.000 -0.1429 0.006803 -0.0001388 -3.000 1.000 -0.1020 0.003317 3.000 -1.571 0.2653 -0.01418 -1.000 0.7143 -0.1701 0.01347 -3.085e-005 1.000 -0.2857 0.02721 -0.0008947 -3.000 1.429 -0.2177 0.01077 3.000 -2.000 0.4354 -0.03070 -1.000 0.8571 -0.2449 0.02329 -3.085e-005 1.000 -0.4286 0.06122 -0.002946 -3.000 1.857 -0.3741 0.02470 3.000 -2.429 0.6463 -0.05629 -1.000 1.000 -0.3333 0.03701 -3.085e-005 1.000 -0.5714 0.1088 -0.006942 -3.000 2.286 -0.5714 0.04705 3.000 -2.857 0.8980 -0.09289 -1.000 1.143 -0.4354 0.05525 -3.085e-005 1.000 -0.7143 0.1701 -0.01353 -3.000 2.714 -0.8095 0.07977 3.000 -3.286 1.190 -0.1425 -1.000 1.286 -0.5510 0.07869 -3.085e-005 1.000 -0.8571 0.2449 -0.02335 -3.000 3.143 -1.088 0.1248 3.000 -3.714 1.524 -0.2069 -1.000 1.429 -0.6803 0.1079 -3.085e-005 1.000 -1.000 0.3333 -0.03707 -3.000 3.571 -1.408 0.1841 3.000 -4.143 1.898 -0.2882 -1.000 1.571 -0.8231 0.1437 -3.085e-005 1.000 -1.143 0.4354 -0.05532 -3.000 4.000 -1.769 0.2596 3.000 -4.571 2.313 -0.3883 -1.000 1.714 -0.9796 0.1866 -3.085e-005 1.000 -1.286 0.5510 -0.07875 -3.000 4.429 -2.170 0.3532 3.000 -5.000 2.769 -0.5092 -1.000 1.857 -1.150 0.2372 -3.085e-005 1.000 -1.429 0.6803 -0.1080 -3.000 4.857 -2.612 0.4669 3.000 -5.429 3.265 -0.6527 -1.000 2.000 -1.333 0.2963 -3.085e-005 1.000 -1.571 0.8231 -0.1438 -3.000 5.286 -3.095 0.6026 3.000 -5.857 3.803 -0.8208 -1.000 2.143 -1.531 0.3644 -3.085e-005

212
1.000 -1.714 0.9796 -0.1866 -3.000 5.714 -3.619 0.7623 3.000 -6.286 4.381 -1.015 -1.000 2.286 -1.741 0.4423 -3.085e-005 1.000 -1.857 1.150 -0.2373 -3.000 6.143 -4.184 0.9479 3.000 -6.714 5.000 -1.239 -1.000 2.429 -1.966 0.5305 -3.085e-005 1.000 -2.000 1.333 -0.2963 -3.000 6.571 -4.789 1.161 3.000 -7.143 5.660 -1.492 -1.000 2.571 -2.204 0.6297 -3.085e-005 1.000 -2.143 1.531 -0.3645 -3.000 7.000 -5.435 1.405 3.000 -7.571 6.361 -1.778 -1.000 2.714 -2.456 0.7406 -3.085e-005 1.000 -2.286 1.741 -0.4423 -3.000 7.429 -6.122 1.680 3.000 -8.000 7.102 -2.099 -1.000 2.857 -2.721 0.8638 -3.085e-005 1.000 -2.429 1.966 -0.5305 -3.000 7.857 -6.850 1.988 3.000 -8.429 7.884 -2.455 -1.000 3.000 -3.000 1.000 -3.085e-005 1.000 -2.571 2.204 -0.6298 -3.000 8.286 -7.619 2.333 3.000 -8.857 8.707 -2.850 -1.000 3.143 -3.293 1.150 -2.957e-005 1.000 -2.714 2.456 -0.7406 -3.000 8.714 -8.429 2.715 3.000 -9.286 9.571 -3.285 -1.000 3.286 -3.599 1.314 -1.543e-005 1.000 -2.857 2.721 -0.8638 -3.000 9.143 -9.279 3.136 3.000 -9.714 10.48 -3.762 -1.000 3.429 -3.918 1.493 -1.285e-006 Cubic basis 22.00 1.000 0.2727 0.02479 0.0007385 -3.000 -0.2727 0.0000 0.0003629 3.000 -0.2727 0.0000 0.0003629 -1.000 0.2727 -0.02479 0.0007385 -1.281e-005 1.000 0.1364 0.006198 6.937e-005 -3.000 0.1364 0.006198 6.937e-005 3.000 -0.6818 0.04339 -0.0004941 -1.000 0.4091 -0.05579 0.002511 -2.455e-005 1.000 0.0000 0.0000 -2.561e-005 -3.000 0.5455 -0.02479 0.0003500 3.000 -1.091 0.1240 -0.004158 -1.000 0.5455 -0.09917 0.005985 -2.561e-005 1.000 -0.1364 0.006198 -0.0001195 -3.000 0.9545 -0.09298 0.002886 3.000 -1.500 0.2417 -0.01233 -1.000 0.6818 -0.1550 0.01171 -2.561e-005 1.000 -0.2727 0.02479 -0.0007769 -3.000 1.364 -0.1983 0.009366 3.000 -1.909 0.3967 -0.02670 -1.000 0.8182 -0.2231 0.02026 -2.561e-005 1.000 -0.4091 0.05579 -0.002561 -3.000 1.773 -0.3409 0.02148 3.000 -2.318 0.5888 -0.04895 -1.000 0.9545 -0.3037 0.03219 -2.561e-005 1.000 -0.5455 0.09917 -0.006036 -3.000 2.182 -0.5207 0.04092 3.000 -2.727 0.8182 -0.08079 -1.000 1.091 -0.3967 0.04806 -2.561e-005 1.000 -0.6818 0.1550 -0.01176 -3.000 2.591 -0.7376 0.06938 3.000 -3.136 1.085 -0.1239 -1.000 1.227 -0.5021 0.06844 -2.561e-005 1.000 -0.8182 0.2231 -0.02031 -3.000 3.000 -0.9917 0.1085 3.000 -3.545 1.388 -0.1800 -1.000 1.364 -0.6198 0.09389 -2.561e-005 1.000 -0.9545 0.3037 -0.03224 -3.000 3.409 -1.283 0.1601 3.000 -3.955 1.729 -0.2507 -1.000 1.500 -0.7500 0.1250 -2.561e-005 1.000 -1.091 0.3967 -0.04811 -3.000 3.818 -1.612 0.2257 3.000 -4.364 2.107 -0.3377 -1.000 1.636 -0.8926 0.1623 -2.561e-005 1.000 -1.227 0.5021 -0.06849 -3.000 4.227 -1.977 0.3072 3.000 -4.773 2.523 -0.4428 -1.000 1.773 -1.048 0.2063 -2.561e-005 1.000 -1.364 0.6198 -0.09394 -3.000 4.636 -2.380 0.4061 3.000 -5.182 2.975 -0.5676 -1.000 1.909 -1.215 0.2577 -2.561e-005 1.000 -1.500 0.7500 -0.1250 -3.000 5.045 -2.820 0.5241 3.000 -5.591 3.465 -0.7139 -1.000 2.045 -1.395 0.3169 -2.561e-005 1.000 -1.636 0.8926 -0.1623 -3.000 5.455 -3.298 0.6630 3.000 -6.000 3.992 -0.8832 -1.000 2.182 -1.587 0.3846 -2.561e-005 1.000 -1.773 1.048 -0.2064 -3.000 5.864 -3.812 0.8244 3.000 -6.409 4.556 -1.077 -1.000 2.318 -1.791 0.4614 -2.561e-005 1.000 -1.909 1.215 -0.2577 -3.000 6.273 -4.364 1.010 3.000 -6.818 5.157 -1.298 -1.000 2.455 -2.008 0.5477 -2.561e-005 1.000 -2.045 1.395 -0.3170 -3.000 6.682 -4.952 1.222 3.000 -7.227 5.795 -1.547 -1.000 2.591 -2.238 0.6441 -2.561e-005 1.000 -2.182 1.587 -0.3847 -3.000 7.091 -5.579 1.461 3.000 -7.636 6.471 -1.825 -1.000 2.727 -2.479 0.7513 -2.561e-005 1.000 -2.318 1.791 -0.4614 -3.000 7.500 -6.242 1.729 3.000 -8.045 7.184 -2.136 -1.000 2.864 -2.733 0.8697 -2.561e-005 1.000 -2.455 2.008 -0.5477 -3.000 7.909 -6.942 2.029 3.000 -8.455 7.934 -2.479 -1.000 3.000 -3.000 1.000 -2.561e-005 1.000 -2.591 2.238 -0.6442 -3.000 8.318 -7.680 2.361 3.000 -8.864 8.721 -2.857 -1.000 3.136 -3.279 1.143 -2.455e-005

213
1.000 -2.727 2.479 -0.7513 -3.000 8.727 -8.455 2.728 3.000 -9.273 9.545 -3.272 -1.000 3.273 -3.570 1.298 -1.281e-005 1.000 -2.864 2.733 -0.8697 -3.000 9.136 -9.267 3.130 3.000 -9.682 10.41 -3.726
-1.000 3.409 -3.874 1.467 -1.067e-006
214

215
APPENDIX I
SIZE AND POWER WITH VARIOUS NULL HYPOTHESES
I.1. STABLE SIZE Actual Size and 95% Conf Limits around 0.10
Stable, 32 observations, 0.10 test
0
0.020.040.060.08
0.10.12
0.14
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.05
Stable, 32 observations, 0.05 test
00.010.020.03
0.040.05
0.060.07
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline

216
Actual Size and 95% Conf Limits around 0.10Stable, 100 observations, 0.10 test
0
0.020.040.060.08
0.10.12
0.14
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.05
Stable, 100 observations, 0.05 test
00.01
0.020.030.040.05
0.060.07
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.10
Stable, 316 observations, 0.10 test
0
0.020.040.060.08
0.10.12
0.14
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.05
Stable, 316 observations, 0.05 test
00.01
0.020.030.040.05
0.060.07
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline

217
Actual Size and 95% Conf Limits around 0.10Stable, 1000 observations, 0.10 test
0
0.020.040.060.08
0.10.12
0.14
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.05
Stable, 1000 observations, 0.05 test
00.010.020.030.040.050.060.070.08
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.10
Stable, 3162 observations, 0.10 test
0
0.020.040.060.08
0.10.12
0.14
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.05
Stable, 3162 observations, 0.05 test
00.01
0.020.030.040.05
0.060.07
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
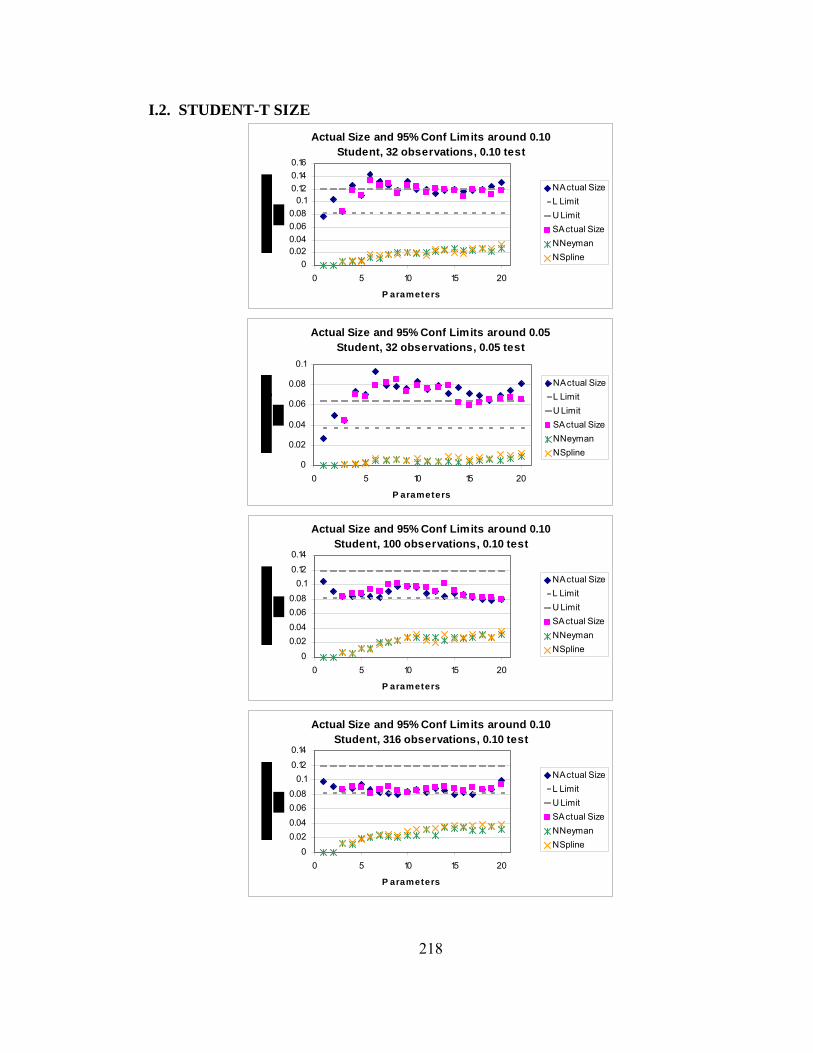
218
I.2. STUDENT-T SIZE Actual Size and 95% Conf Limits around 0.10
Student, 32 observations, 0.10 test
00.020.040.060.08
0.10.120.140.16
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.05
Student, 32 observations, 0.05 test
0
0.02
0.04
0.06
0.08
0.1
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.10
Student, 100 observations, 0.10 test
0
0.020.040.060.08
0.10.12
0.14
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.10
Student, 316 observations, 0.10 test
0
0.020.040.060.08
0.10.12
0.14
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
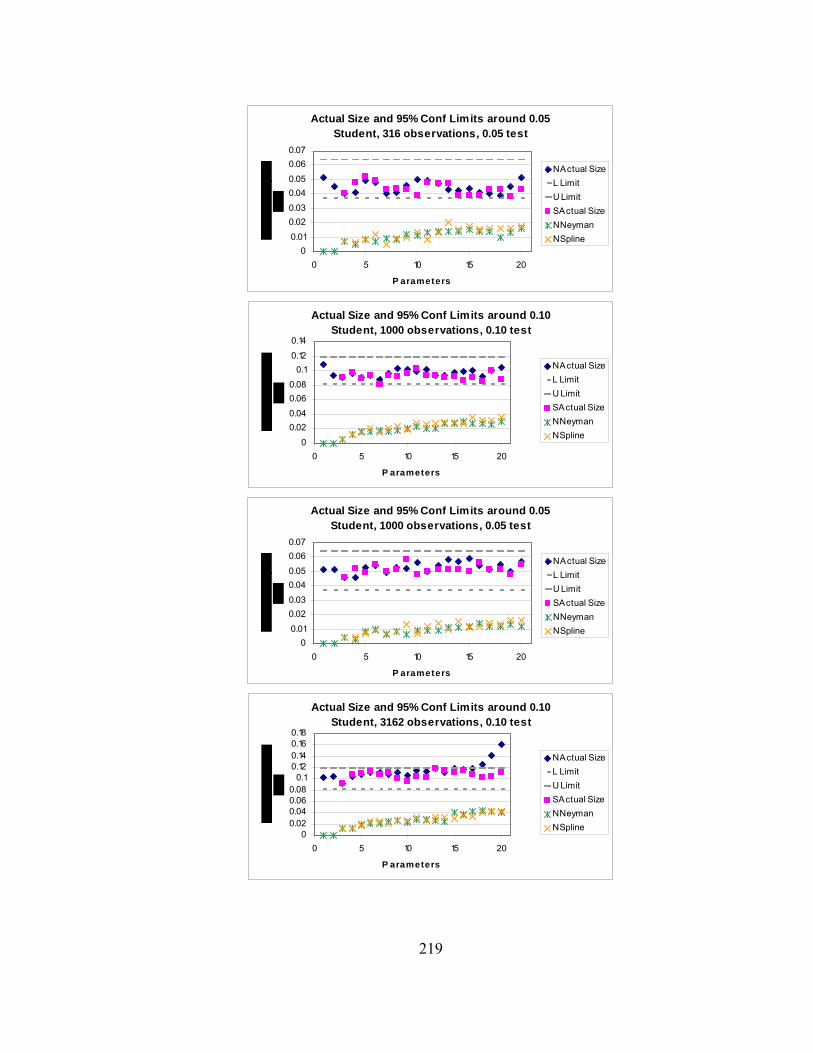
219
Actual Size and 95% Conf Limits around 0.05Student, 316 observations, 0.05 test
00.01
0.020.030.040.05
0.060.07
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.10
Student, 1000 observations, 0.10 test
0
0.020.040.060.08
0.10.12
0.14
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.05
Student, 1000 observations, 0.05 test
00.01
0.020.030.040.05
0.060.07
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.10
Student, 3162 observations, 0.10 test
00.020.040.060.08
0.10.120.140.160.18
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
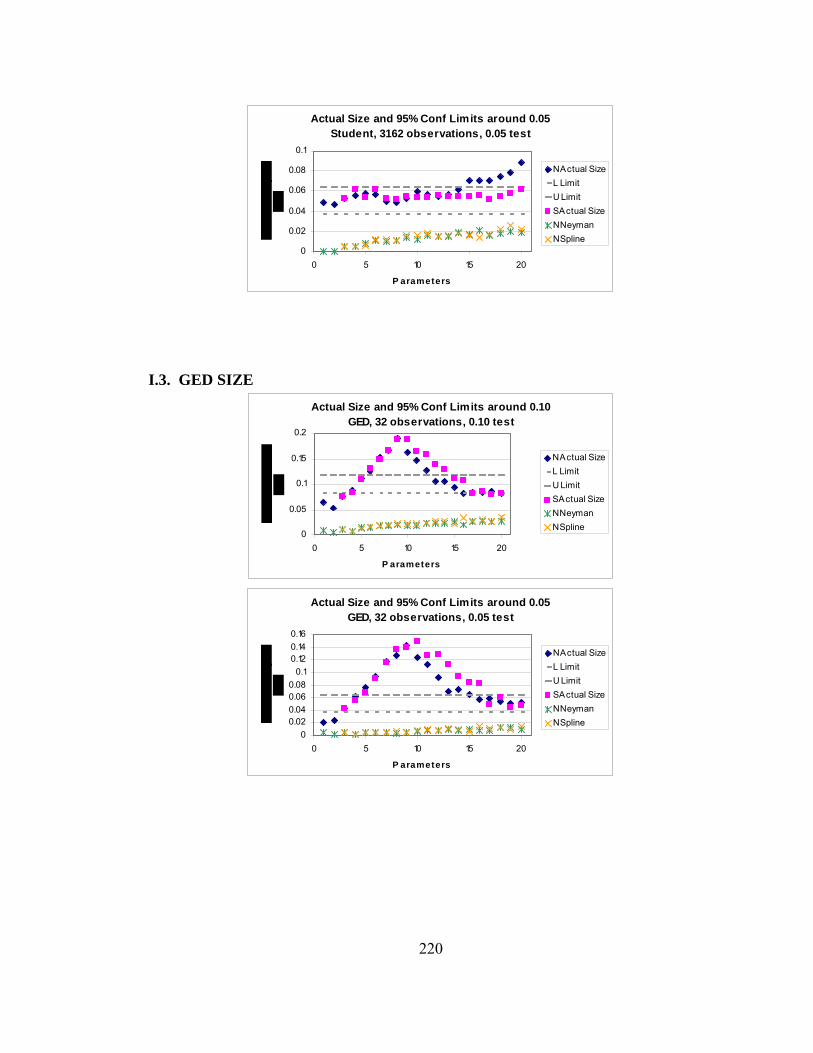
220
Actual Size and 95% Conf Limits around 0.05Student, 3162 observations, 0.05 test
0
0.02
0.04
0.06
0.08
0.1
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
I.3. GED SIZE
Actual Size and 95% Conf Limits around 0.10GED, 32 observations, 0.10 test
0
0.05
0.1
0.15
0.2
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.05
GED, 32 observations, 0.05 test
00.020.040.060.08
0.10.120.140.16
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline

221
Actual Size and 95% Conf Limits around 0.10GED, 100 observations, 0.10 test
00.020.040.060.08
0.10.120.140.160.18
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.05
GED, 100 observations, 0.05 test
0
0.02
0.04
0.06
0.08
0.1
0.12
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.10
GED, 316 observations, 0.10 test
0
0.020.040.060.08
0.10.12
0.14
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.05
GED, 316 observations, 0.05 test
00.01
0.020.030.040.05
0.060.07
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline

222
Actual Size and 95% Conf Limits around 0.10GED, 1000 observations, 0.10 test
0
0.020.040.060.08
0.10.12
0.14
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.05GED, 1000 observations, 0.05 test
00.01
0.020.030.040.05
0.060.07
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.10
GED, 3162 observations, 0.10 test
0
0.020.040.060.08
0.10.12
0.14
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.05
GED, 3162 observations, 0.05 test
00.010.020.030.040.050.060.070.08
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline

223
I.4. MIXTURE SIZE Actual Size and 95% Conf Limits around 0.10
Mixture, 32 observations, 0.10 test
0
0.020.040.060.08
0.10.12
0.14
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.05
Mixture, 32 observations, 0.05 test
00.010.020.03
0.040.05
0.060.07
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.10
Mixture, 100 observations, 0.10 test
0
0.020.040.060.08
0.10.12
0.14
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.05
Mixture, 100 observations, 0.05 test
00.01
0.020.030.040.05
0.060.07
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline

224
Actual Size and 95% Conf Limits around 0.10Mixture, 316 observations, 0.10 test
0
0.020.040.060.08
0.10.12
0.14
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.05
Mixture, 316 observations, 0.05 test
00.01
0.020.030.040.05
0.060.07
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.10
Mixture, 1000 observations, 0.10 test
0
0.020.040.060.08
0.10.12
0.14
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.05
Mixture, 1000 observations, 0.05 test
00.01
0.020.030.040.05
0.060.07
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
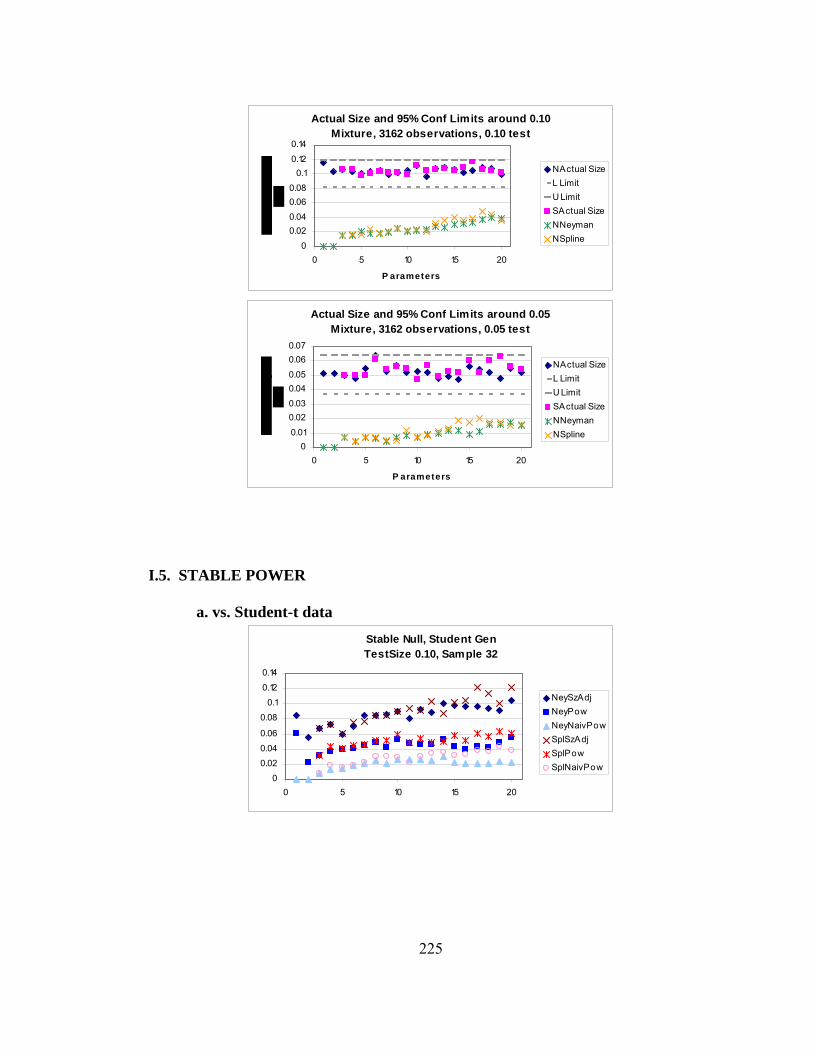
225
Actual Size and 95% Conf Limits around 0.10Mixture, 3162 observations, 0.10 test
0
0.020.040.060.08
0.10.12
0.14
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
Actual Size and 95% Conf Limits around 0.05
Mixture, 3162 observations, 0.05 test
00.01
0.020.030.040.05
0.060.07
0 5 10 15 20
P arameters
NActual SizeL LimitU LimitSActual SizeNNeymanNSpline
I.5. STABLE POWER
a. vs. Student-t data Stable Null, Student GenTestSize 0.10, Sample 32
0
0.020.04
0.06
0.08
0.10.12
0.14
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow

226
Stable Null, Student GenTestSize 0.10, Sample 100
0
0.020.04
0.06
0.08
0.10.12
0.14
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Stable Null, Student GenTestSize 0.10, Sample 316
0
0.05
0.1
0.15
0.2
0.25
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Stable Null, Student GenTestSize 0.10, Sample 1000
0
0.1
0.2
0.3
0.4
0.5
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Stable Null, Student Gen
TestSize 0.10, Sample 3162
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
b. vs. GED data
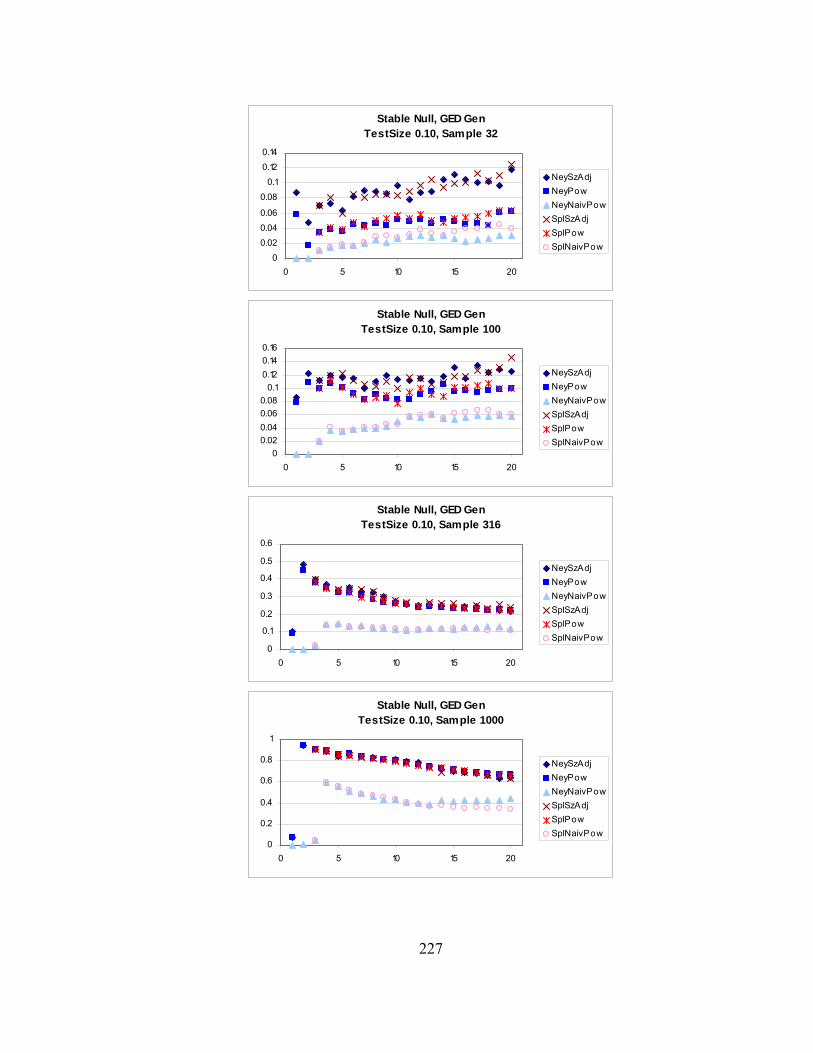
227
Stable Null, GED GenTestSize 0.10, Sample 32
0
0.020.04
0.06
0.08
0.10.12
0.14
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Stable Null, GED Gen
TestSize 0.10, Sample 100
00.020.040.060.08
0.10.120.140.16
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Stable Null, GED Gen
TestSize 0.10, Sample 316
0
0.1
0.2
0.3
0.4
0.5
0.6
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Stable Null, GED Gen
TestSize 0.10, Sample 1000
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
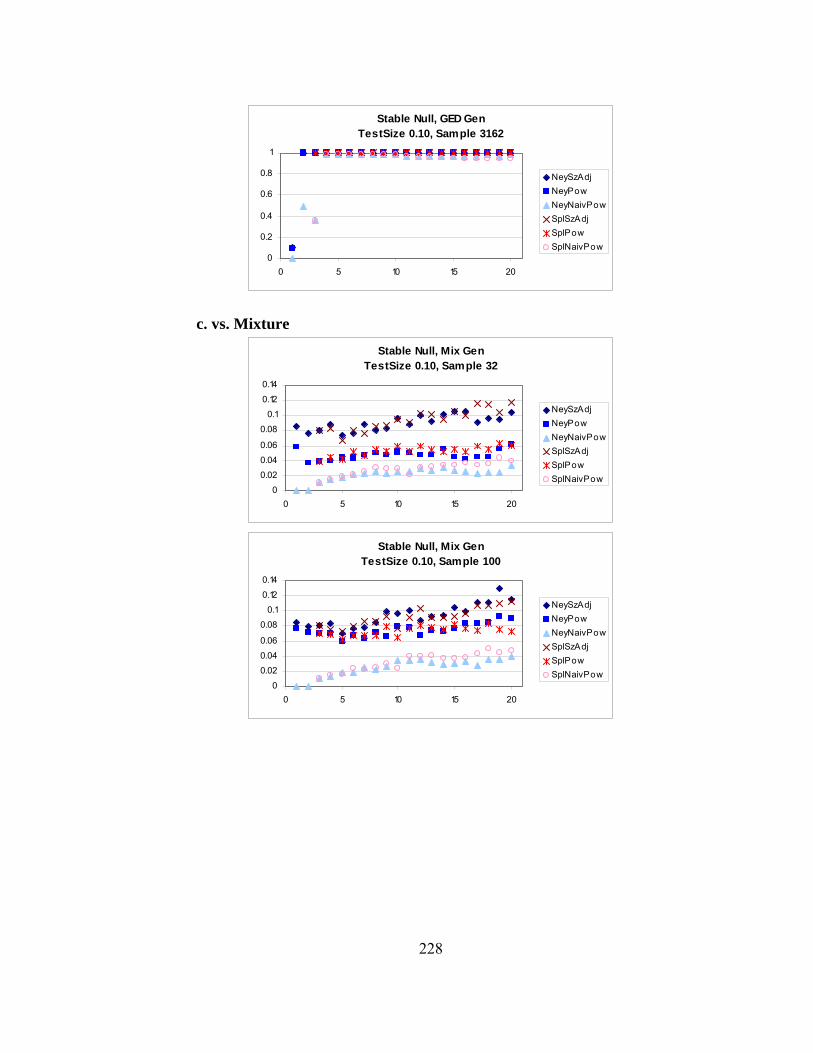
228
Stable Null, GED GenTestSize 0.10, Sample 3162
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
c. vs. Mixture
Stable Null, Mix GenTestSize 0.10, Sample 32
0
0.020.04
0.06
0.08
0.10.12
0.14
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Stable Null, Mix Gen
TestSize 0.10, Sample 100
0
0.020.04
0.06
0.08
0.10.12
0.14
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow

229
Stable Null, Mix GenTestSize 0.10, Sample 316
0
0.02
0.04
0.06
0.08
0.1
0.12
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Stable Null, Mix Gen
TestSize 0.10, Sample 1000
00.020.040.060.08
0.10.120.140.16
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Stable Null, Mix Gen
TestSize 0.10, Sample 3162
00.05
0.10.150.2
0.250.3
0.350.4
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow

230
I.6. STUDENT-T POWER a. vs. Stable
Student Null, Stable GenTestSize 0.10, Sample 32
0
0.05
0.1
0.15
0.2
0.25
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Student Null, Stable Gen
TestSize 0.10, Sample 100
0
0.05
0.1
0.15
0.2
0.25
0.3
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Student Null, Stable Gen
TestSize 0.10, Sample 316
0
0.1
0.2
0.3
0.4
0.5
0.6
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow

231
Student Null, Stable GenTestSize 0.10, Sample 1000
00.10.20.30.40.50.60.70.80.9
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Student Null, Stable Gen
TestSize 0.10, Sample 3162
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
b. vs. GED

232
Student Null, GED GenTestSize 0.10, Sample 32
0
0.020.04
0.06
0.08
0.10.12
0.14
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Student Null, GED Gen
TestSize 0.10, Sample 100
0
0.020.04
0.06
0.08
0.10.12
0.14
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Student Null, GED Gen
TestSize 0.10, Sample 316
0
0.05
0.1
0.15
0.2
0.25
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Student Null, GED Gen
TestSize 0.10, Sample 1000
0
0.1
0.2
0.3
0.4
0.5
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow

233
Student Null, GED GenTestSize 0.05, Sample 3162
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
c. vs. Mixture Student Null, Mix Gen
TestSize 0.10, Sample 32
0
0.05
0.1
0.15
0.2
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Student Null, Mix Gen
TestSize 0.10, Sample 100
00.020.040.060.08
0.10.120.140.16
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Student Null, Mix Gen
TestSize 0.10, Sample 316
0
0.05
0.1
0.15
0.2
0.25
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow

234
Student Null, Mix GenTestSize 0.10, Sample 1000
00.05
0.10.150.2
0.250.3
0.350.4
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Student Null, Mix Gen
TestSize 0.10, Sample 3162
00.10.20.30.40.50.60.70.8
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
I.7. GED POWER a. vs. Stable
GED Null, Stable GenTestSize 0.10, Sample 32
0
0.05
0.1
0.15
0.2
0.25
0.3
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow

235
GED Null, Stable GenTestSize 0.10, Sample 100
00.05
0.10.150.2
0.250.3
0.350.4
0.45
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
GED Null, Stable Gen
TestSize 0.10, Sample 316
00.10.20.30.40.50.60.70.80.9
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
GED Null, Stable Gen
TestSize 0.10, Sample 1000
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
GED Null, Stable Gen
TestSize 0.10, Sample 3162
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow

236
b. vs. Student-t
GED Null, Student GenTestSize 0.10, Sample 32
0
0.05
0.1
0.15
0.2
0.25
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
GED Null, Student Gen
TestSize 0.10, Sample 100
0
0.05
0.1
0.15
0.2
0.25
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
GED Null, Student Gen
TestSize 0.10, Sample 316
0
0.05
0.1
0.15
0.2
0.25
0.3
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
GED Null, Student Gen
TestSize 0.10, Sample 1000
0
0.10.2
0.3
0.4
0.50.6
0.7
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow

237
GED Null, Student GenTestSize 0.10, Sample 3162
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
c. vs. Mixture GED Null, Mix Gen
TestSize 0.10, Sample 32
0
0.05
0.1
0.15
0.2
0.25
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
GED Null, Mix Gen
TestSize 0.10, Sample 100
0
0.050.1
0.15
0.2
0.250.3
0.35
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
GED Null, Mix Gen
TestSize 0.10, Sample 316
0
0.1
0.2
0.3
0.4
0.5
0.6
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow

238
GED Null, Mix GenTestSize 0.10, Sample 1000
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
GED Null, Mix Gen
TestSize 0.10, Sample 3162
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
I.8. MIXTURE POWER a. vs. Stable
Mixture Null, Stable GenTestSize 0.10, Sample 32
0
0.020.04
0.06
0.08
0.10.12
0.14
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow

239
Mixture Null, Stable GenTestSize 0.10, Sample 100
0
0.020.04
0.06
0.08
0.10.12
0.14
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Mixture Null, Stable Gen
TestSize 0.10, Sample 316
00.020.040.060.08
0.10.120.140.160.18
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Mixture Null, Stable Gen
TestSize 0.05, Sample 1000
0
0.05
0.1
0.15
0.2
0.25
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Mixture Null, Stable Gen
TestSize 0.10, Sample 3162
00.10.20.30.40.50.60.70.80.9
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow

240
b. vs. Student-t
Mixture Null, Student GenTestSize 0.10, Sample 32
0
0.02
0.04
0.06
0.08
0.1
0.12
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Mixture Null, Student GenTestSize 0.10, Sample 100
0
0.02
0.04
0.06
0.08
0.1
0.12
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Mixture Null, Student GenTestSize 0.10, Sample 316
0
0.020.04
0.06
0.08
0.10.12
0.14
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Mixture Null, Student Gen
TestSize 0.10, Sample 1000
0
0.05
0.1
0.15
0.2
0.25
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow

241
Mixture Null, Student GenTestSize 0.10, Sample 3162
0
0.1
0.2
0.3
0.4
0.5
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
c. vs. GED Mixture Null, GED Gen
TestSize 0.10, Sample 32
0
0.02
0.04
0.06
0.08
0.1
0.12
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Mixture Null, GED Gen
TestSize 0.10, Sample 100
0
0.02
0.04
0.06
0.08
0.1
0.12
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Mixture Null, GED Gen
TestSize 0.10, Sample 316
0
0.020.04
0.06
0.08
0.10.12
0.14
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow

242
Mixture Null, GED GenTestSize 0.10, Sample 1000
0
0.05
0.1
0.15
0.2
0.25
0.3
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow
Mixture Null, GED Gen
TestSize 0.10, Sample 3162
0
0.10.2
0.3
0.4
0.50.6
0.7
0 5 10 15 20
NeySzAdjNeyPowNeyNaivPowSplSzAdjSplPowSplNaivPow

243
BIBLIOGRAPHY
Adler, Robert J., Raisa E. Feldman, and Murad S. Taqqu, Editors, A Practical Guide to Heavy Tails, Birkhäuser, 1998.
Andrews, Donald W.K., “A Conditional Kolmogorov Test,” Econometrica, 65, 1097-1128, 1997.
Bai, Jushan, “Testing Parametric Conditional Distributions of Dynamic Models,” MIT Department of Economics, 1997.
Bera, Anil K. and Colin R. McKenzie, “Tests for Normal with Stable Alternatives,” Journal of Statistical Computation and Simulation, 25, 37-52, 1986.
Blattberg, R. and N. Gonedes, 1974, "A Comparison of the Stable and Student Distributions as Statistical Models for Stock Prices," Journal of Business 47, 244-280.
Bollerslev, T., “A Conditional Heteroskedastic Time Series Model for Speculative Prices and Rates of Return,” Review of Economics and Statistics, 69, 542-547, 1987. Boothe, Paul, and Debra Glassman, “The Statistical Distribution of Exchange Rates,” Journal of International Economics, 22, 297-319, 1987. Borak, Szymon, Wolgang Härdle, Rafal Waron, “Stable Distributions,” SFB Discussion Paper 2005-008. Borowski, E.J., and Borwein, J.M., The HarperCollins Dictionary of Mathematics, HarperPerennial, 1991. Box, George E.P. and Gwilym M Jenkins, Time Series Analysis: Forecasting and Control, Holden-Day, 1970. Campbell, JohnY., AndrewW. Lo, and A.Craig MacKinlay, The Econometrics of Financial Markets, Princeton University Press, 1997. Chernoff, H. and E.L. Lehmann, “The Use of Maximum Likelihood Estiamtes in χ2 Tests for Goodness of Fit,” Ann. Math. Statist., 25, 579-586, 1954. Clark, Peter K., “A Subordinated Stochastic Process Model with Finite Variance for Speculative Prices,” Econometrica, 41, 135-155, 1973.

244
Davidson, Russell, and James G. MacKinnon, Estimation and Inference in Econometrics, Oxford University Press, 1993. DeGroot, Morris, Probability and Statistics, Second Edition, Addison-Wesley, 1986. Engle, R., and G. Gonzalez-Rivera, 1991, “Semiparametric ARCH Models,” Journal of Business and Economic Statistics, 9, 345-359, 1991.
Fama, E., 1965, "The Behavior of Stock Prices," Journal of Business 38, 34-105.
Fama, E., 1976, Foundations of Finance. New York: Basic Books.
Fama, Eugene F., and Kenneth R. French, “Dividend Yields and Expected Stock Returns,” Journal of Financial Economics, 22, 3-25, 1988. Fama, Eugene F., and Kenneth R. French, “Business Conditions and Expected Returns on Stocks and Bonds,” Journal of Financial Economics, 25, 23-49, 1989. French, Kenneth R., http://mba.tuck.dartmouth.edu/pages/faculty/ken.french/data_library.html, October 2003 Hagerman, Robert L., “More Evidence on the Distribution of Security Returns,” Journal of Finance, 33, pp. 1213-1221, 1978. Hogg, Robert V., and Allen T. Craig, Introduction to Mathematical Statistics, Third Edition, MacMillan Publishing Company, 1970. Judd, Kenneth L., Numerical Methods in Economics, The MIT Press, 1999. Kellison, Stephen G., Fundamentals of Numerical Analysis, Richard D. Irwin, Inc., 1975 Li, Qi, “Semiparametric Estimation and Testing of Econometric Models,” Department of Economics, University of Guelph (Canada), 1997. Mandelbrot, Benoit, “ The Variation of Certain Speculative Prices,” Journal of Business, 36, 394-419, 1963. Marsaglia, G. (2000) “The Monster, A Random Number Generator with Period over 102857 Times as Long as the Previously Touted Longest-period One,” noted at http://www.aptech.com/random McCulloch, J. Huston, “Simple Consistent Estimators of Stable Distribution Parameters,” Communications in Statistics—Simulation, 15, 1109-1136.

245
McCulloch, J. Huston, "Numerical Approximation of the Symmetric Stable Distribution and Density," OSU Econ Dept., Oct. 1994. McCulloch, J. Huston, “Measuring the Term Structure of Interest Rates,” Journal of Business, 44, 19-31, 1971. McCulloch, J. Huston, “The Tax-Adjusted Yield Curve,” Journal of Finance, 20, 811-30, 1975. McCulloch, J. Huston, “Financial Applications of Stable Distributions,” Statistical Methods in Finance (Handbook of Statistics 14), G.S. Maddala and C.R.Rao, eds., Elsevier Science, Amsterdam, 1996. McCulloch, J. Huston, “Measuring Tail Thickness to Estimate the Stable Index α: A Critique,” Journal of Business & Economic Statistics, Vol. 15, No. 1, 74-81, January 1997. McCulloch, J. Huston, "Linear Regression with Stable Disturbances," in R. Adler, R. Feldman, and M.S. Taqqu, eds., A Practical Guide to Heavy Tails, Birkhaeuser, Boston, 1998. McCulloch, J. Huston, “A Spline Rao Score (LM) Test for Goodness of Fit: A Proposal,” 1999. Mood, Alexander M., Franklin A. Graybill, and Duane C. Boes, Introduction to the Theory of Statistics, Third Edition, McGraw-Hill, 1974. Nelson, D., “Conditional Heteroskedasticity in Asset Returns: A New Approach,” Econometrica, 59, 347-370, 1991. Pagan, Adrian, and Aman Ullah, Nonparametric Econometrics, Cambridge University Press, 1999. Perry, Philip R., “More Evidence on the Nature of the Distribution of Security Returns,” Journal of Financial and Quantitative Analysis, 18, 211-221, 1983. Praetz, Peter D., “The Distribution of Share Price Changes,” Journal of Business, 45, 49-55, 1972. Press, William H., Saul A. Teukolsky, William T. Vetterling, Brian P. Flannery, Numerical Recipes in Fortran 77: The Art of Scientific Computing, Second Edition, Cambridge University Press, 1992.

246
Ralston, Anthony and Philip Rabinowitz, A First Course in Numerical Analysis, Dover Publications, Inc., 1978 Rayner, J.C.W., and D.J. Best, Smooth Tests of Goodness of Fit, Oxford University Press, 1989. Salsburg, David, The Lady Tasting Tea: How Statistics Revolutionized Science in the Twentieth Century, Henry Holt and Company, 2001. Samorodnitsky, Gennady, and Murad S. Taqqu, Stable Non-Gaussian Random Processes: Stochastic Processes with Infinite Variance,” Chapman and Hall, New York, 1994. Taylor, S., Modeling Financial Time Series, London: John Wiley & Sons, 1986. Wilkinson, J. H., Rounding Errors in Algebraic Processes, Prentice-Hall, Inc., 1963.