a boundary condition-enforced immersed boundary method for
TRANSCRIPT

A Sharp-Interface Immersed Boundary Method forSimulating High-Speed Compressible InviscidFlowsJunjie Wang
Nanjing University of Aeronautics and AstronauticsXiangyu Gu
China Academy of Launch Vehicle TechnologyJie Wu ( [email protected] )
Nanjing University of Aeronautics and Astronautics
Research
Keywords: immersed boundary method, inviscid compressible �ows, sharp interface, shock waves,OpenFOAM
Posted Date: September 17th, 2020
DOI: https://doi.org/10.21203/rs.3.rs-47580/v2
License: This work is licensed under a Creative Commons Attribution 4.0 International License. Read Full License
Version of Record: A version of this preprint was published on October 20th, 2020. See the publishedversion at https://doi.org/10.1186/s42774-020-00049-4.

1
A Sharp-Interface Immersed Boundary Method for
Simulating High-Speed Compressible Inviscid Flows
Junjie Wang1, Xiangyu Gu2, Jie Wu1, 3*
1. Department of Aerodynamics, Nanjing University of Aeronautics and Astronautics,
Yudao Street 29, Nanjing, Jiangsu 210016, China
2. China Academy of Launch Vehicle Technology,
Nandahongmen Street 1, Beijing 100076, China
3. Key Laboratory of Unsteady Aerodynamics and Flow Control, Ministry of Industry
and Information Technology, Nanjing University of Aeronautics and Astronautics,
Yudao Street 29, Nanjing, Jiangsu 210016, China
Abstract
This paper presents a robust sharp-interface immersed boundary method for
simulating inviscid compressible flows over stationary and moving bodies. The flow
field is governed by Euler equations, which are solved by using the open source
library OpenFOAM. Discontinuities such as those introduced by shock waves are
captured by using Kurganov and Tadmor divergence scheme. Wall-slip boundary
conditions are enforced at the boundary of body through reconstructing flow variables
at some ghost points. Their values are obtained indirectly by interpolating from their
mirror points. A bilinear interpolation is employed to determine the variables at the
mirror points from boundary conditions and flow conditions around the boundary. To
* Corresponding author; Email: [email protected].

2
validate the efficiency and accuracy of this method for simulation of high-speed
inviscid compressible flows, four cases have been simulated as follows: supersonic
flow over a 15° angle wedge, transonic flow past a stationary airfoil, a piston moving
with supersonic velocity in a shock tube and a rigid circular cylinder lift-off from a
flat surface triggered by a shock wave. Compared to the exact analytical solutions or
the results in literature, good agreement can be achieved.
Keywords: immersed boundary method; inviscid compressible flows; sharp
interface; shock waves; OpenFOAM;
1. Introduction
Inviscid flows are usually used as flow field conditions for fast transient
problems, such as the impact of shock waves onto a structure [1-4] and the internal
flow field arising within a solid rocket motor [5]. To treat such problems, the
conventional body-conformal grid methods [6, 7] can be utilized. Although it is direct
to enforce boundary conditions on the fluid-structure interface with a body-conformal
grid method, the complex-shaped structure increases too much work on the grid
generation process. Moreover, a re-meshing algorithm is required to adapt a moving
solid boundary which consumes more computing time and increases the algorithmic
complexity of these body-conformal grid methods. For using a non-conforming
Cartesian grid, on the other hand, the immersed boundary method (IBM) has gained
attention as an appropriate method for tackling flows with complex-shaped stationary
or moving boundaries during last two decades. Applying the advantage of Cartesian
grid, in particular, some high-order algorithms for complicated moving problems have

3
been developed [8, 9].
It is well known that the IBM was firstly proposed by Peskin [10] to simulate the
blood flow in the heart. Following the pioneer work of Peskin, numerous scientists
have contributed to improve the accuracy and efficiency of the IBM. Huang et al. [11]
introduced the variety of IBM fundamentals and assessed the latest progresses
especially the strategies to address the challenges and the applications of the IBM.
According to the work of Cui et al. [12], the IBM can be classified into two categories,
namely diffused-interface methods and sharp-interface methods based on the
representation of the fluid-structure interface. The diffused-interface IBM can be
regarded as a continuous forcing approach. The boundary is smeared by distributing a
forcing term [11, 13] and a source term [14] to the surrounding Cartesian grid points
via a delta function [15]. After that, these two terms are added to the momentum
equation and energy equation, respectively. Our previous work [16] developed an
implicit diffused-interface IBM based on variable correction for simulating
compressible viscous flows over stationary and moving bodies. Furthermore, Wang et
al. [17] applied a diffused-interfaced IBM to simulate compressible multiphase flows.
The significant advantage of diffused-interface IBM is that it is formulated
independent of the spatial discretization, and it simplifies the implementation into an
existing fluid solver, just like [13, 14]. However, Sotiropoulos and Yang [18]
indicated that the classic diffused-interface IBM is difficult to simulate fluid-structure
interaction problems, because the inherent stiffness of the forcing term may induce
numerical instabilities and spurious oscillations.

4
On the other hand, the sharp-interface IBM can be regard as a discrete forcing
approach, in which the boundary is precisely tracked. It includes cut-cell method [19,
20], Cartesian IB method [12, 21], and ghost-cell method [8, 9]. Among these
methods, the cut-cell method can obtain the clearest interface. The reason is that the
boundary divides grid cells into two sub-cells for the solid phase and fluid phase,
respectively. Therefore, the conservation of mass, momentum and energy can be
strictly enforced into the fluid phase. However, the complicated cell reshaping
procedure causes difficulties in simulating complex moving body problems. In the
Cartesian IB method, the fluid points with at least one neighboring point inside the
solid body are called IB points or forcing points. Reconstructing the flow variables at
these points and enforcing the boundary conditions can ensure the accuracy of the
flow field. The ghost-cell method is similar to the Cartesian IB method. The solid
points with at least one neighboring point inside the fluid domain are called ghost
points. The reconstruction procedure is done at these ghost points. Tran and Plourde
[5] used both the Cartesian IB method and the ghost-cell method to solve internal
flows. Although the Cartesian IB method and the ghost-cell method are less accurate
than the cut-cell method because of their implicit representation of the solid boundary,
point recognition procedure is easier than the cut-cell procedure, and the flux
calculation around the immersed boundary is also not necessary. Mittal et al. [22]
have shown the large potential of ghost-cell method for simulation of highly complex
moving body problems.
In the ghost-cell method, the flow variables at the ghost points cannot be

5
interpolated from the fluid field or the boundary conditions directly. Thus, an image
point can be considered, which is the mirror of ghost point along the normal direction
to the boundary and is always in the fluid domain. A body intercept point is the
midway point between ghost point and image point, which must be on the boundary.
Therefore, boundary conditions can be enforced on body intercept points directly. The
flow variables at ghost points are interpolated from corresponding image points and
body intercept points [5, 8, 9, 22]. A significant issue of ghost-cell method is the
accuracy of the interpolation procedure at image points from corresponding body
intercept points and fluid points. Shuvayan et al. [21] used an inverse distance
weighting interpolation method to reconstruct the flow variables. This scheme
preserves the local maxima and minima, which leads to a smooth reconstruction and
is more stable than a polynomial reconstruction. A linear interpolation method was
used in [5, 12] to reconstruct the values at IB points. Khalili et al. [9] used a bilinear
interpolation for two-dimensional problems, and Mittal et al. [22] used a trilinear
interpolation for three-dimensional problems similarly. Higher-order polynomials are
required for more accurate results, but they often lead to numerical instabilities, and
more information is needed to determine the polynomials. Qu et al. [8] listed four
polynomials for the interpolation: a linear, an incomplete quadratic (bilinear), a
complete quadratic and a cubic. They found that higher-order polynomials (e.g., a
cubic polynomial) required more interpolation points and the computational time may
significantly increase. Furthermore, they revealed that the complete quadratic
polynomial does not significantly improve the accuracy of their method but requires

6
more interpolation points than the incomplete quadratic polynomial. It is shown that
bilinear interpolation may be an expected scheme to reconstruct the flow variables.
In this work, we present a robust IBM to simulate high-speed compressible
inviscid flows over stationary and moving bodies. The Euler equations are discretized
on a Cartesian grid and solved by a segregated density-based solver, namely
rhoCentralFoam with Kurganov and Tadmor divergence scheme in the open source
library OpenFOAM. The sharp-interface IBM is adopted, which is a significant issue
in this work, because the exact location of shock waves has to be predicted. Khalili et
al. [9] developed a ghost-cell IBM to simulate viscous compressible flows, and a
bilinear interpolation was utilized to reconstruct the flow variables. However, it is
noted that only low Mach number flows were considered in their study and the
obtained conclusions were similar to that of incompressible flows. In this study, the
similar ghost-cell IBM is adopted for enforcing the boundary conditions in simulating
high-speed compressible inviscid flows. For a moving rigid object, moreover, the
Newton’s second law of motion is utilized to solve strong coupling between fluid and
structural within each time step. Because of inviscid flows, there is no viscous stress
or torque on solid surface and the rotational motion is not involved. To validate the
proposed method combined with OpenFOAM, two stationary cases are simulated:
supersonic flow over a 15° angle wedge and transonic flow past a stationary airfoil.
Then a moving piston and a lifting-off circular cylinder are simulated to validate the
current method for handling moving body problems. All the results are compared well
with the exact analytical solutions or the results in literature.

7
This paper is organized as follows. In Section 2, governing equations for fluid
flows and motions of rigid bodies are described. In Section 3, numerical methods are
presented, i.e., the governing equations in OpenFOAM and the ghost-cell IBM. In
Section 4, four cases are simulated to validate the efficiency and accuracy of this
method. In Section 5, conclusions are summarized.
2. Governing Equations
For flows over a stationary body, only the flow field should be resolved. But for
flows over a moving body, both the flow field and the motion of body should be
resolved. Moreover, the fluid is strongly affected by the existence of body, and the
body motions are coupled with the fluid flows.
2.1 Governing equations for fluid flows
For inviscid compressible flows, the Euler equations are solved, which can be
written as follows:
( ) 0t
+ =
u (1)
( ) ( ) 0pt
+ + =
u
uu (2)
( ) ( ) 0t
t
ee p
t
+ + =
u u (3)
where is the fluid density, u is the fluid velocity, and p is the pressure. In
addition, te is the total energy that includes kinetic energy and internal energy:
1 1
2 2t v
e e C T = + = + u u u u (4)
where e is the internal energy, vC is the heat capacity at constant volume, and T

8
is the fluid temperature. As the perfect gas is considered here, the equation of state
p RT= is adopted, where R is the specific gas constant.
The Mach number Ma is defined as U
MaRT
= , where U is the
freestream velocity, T is the freestream temperature, and is the specific heat
ratio, which is kept constant at 1.4 in present work. The pressure coefficient is defined
as ( ) 21/ 2
Bp
p pC
U
−= , where B
p is the pressure on the boundary of body, p is the
freestream pressure, and is the freestream density.
2.2 Governing equations for a passively moving rigid body
For a moving rigid body, only the velocity and the position vector of the mass
center ( cU , c
X ) are considered in this work. Due to the inviscid flows, the rotational
motion of the body is not involved since there is no existence of viscous stress or
torque. According to the Newton’s second law, the translational motion of a passively
moving rigid body can be solved by the following equations:
cc
d
dt=
XU (5)
cf
dm
dt= F
U (6)
where m is the mass of the body, and fF is the resultant force imparted by the
fluid to the body, which can be given by:
f fdS p dS
= = − f nF (7)
where ff represents the force per unit area on the boundary of body by the fluid,
which only includes the pressure interpolated from the flow fields, and represents
the boundary of body. ( ), tn = n X is the unit normal vector from the boundary into

9
the flow field, where X represents the position of the point on the boundary.
3. Numerical Methods
3.1 Basic solver in OpenFOAM
As mentioned in Introduction, an open source code, i.e. OpenFOAM, is used to
solve the governing equations of flow field. The codes in OpenFOAM are based on
cell-centered finite-volume method. High-speed compressible flows can be simulated
by the solver rhoCentralFoam, which is a semi-implicit segregated density-based
solver with the Kurganov-Tadmor divergence scheme [23]. More details about the
algorithmic structure of rhoCentralFoam solver can be found in Ref. [14]. In our
recent work [16], this solver has been combined with a diffused-interface IBM to
simulate viscous compressible flows. To extend this solver to deal with inviscid
compressible flows, only the viscous terms of the governing equations are ignored.
3.2 Boundary conditions
Classical boundary conditions including subsonic or supersonic inlet, subsonic or
supersonic outlet and walls are applied at the external boundaries of the computational
domain. For the inviscid flows, no boundary layer should develop in the vicinity of
the boundary of body. When a stationary body is considered, the traditional slip
boundary condition can be used on the boundary of body [5]. But when a moving
body is considered, the no-penetration boundary condition should be used. The
velocity vector ( ), tu X on the boundary is decomposed into the normal and
tangential velocity components:

10
( ) ( ) ( ), , ,t t t = n
u X u X n X (8)
( ) ( ) ( ), , ,t t t = u X u X X (9)
where ( ), tX is the unit tangential vector at X , which is perpendicular to the
unit normal vector. Considering the no-penetration boundary condition, these
components are then written as:
( ) ( ) ( ), ,ct t t = n
u X n XU (10)
( ),0
t
n
=
u X (11)
where the velocity of the body mass center ( )c tU has been introduced in the
previous section and it is independent of X for a rigid body.
For a stationary body, the pressure boundary condition / 0p n = can be
applied on the boundary. But it should be reformulated for a moving body. Following
the work of Udaykumar et al. [24], the pressure gradient normal to the boundary is
obtained by projecting the momentum equation into the boundary normal direction,
which results in:
( ) ( ) ( ),, ,
p t Dt t
n Dtt
= − = −
+
u u
nu n XuX
X (12)
where /D Dt is the material derivative. /D Dtu can be approximated directly
from the known boundary velocities and this obviates the approximation of the
convective term [8, 24].
In addition, an adiabatic boundary condition is applied at the boundary. The
temperature gradient normal to the surface is written as:
( ),0
T t
n
=
X
(13)

11
The boundary conditions above can be classified into two categories, Dirichlet
boundary condition (Eq. (10)) and Neumann boundary conditions (Eqs. (11-13)). In
our previous work [16], a variable correction-based IBM is developed to correct the
variables with the Dirichlet boundary condition, including the no-slip boundary
condition and the isothermal boundary condition. But it is difficult to handle the
Neumann boundary conditions. In this work, both two boundary conditions need to be
enforced into the proposed method.
3.3 Sharp-interface immersed boundary method
As one of sharp-interface immersed boundary methods, the ghost-cell IBM is
employed to impose the boundary conditions on the boundary of body in this work.
According to the location of boundary, the computational grid nodes lying inside the
body are identified as the solid points, and the nodes lying outside the body are
identified as the fluid points. Considering the rhoCentralFoam solver employed, one
layer of solid points adjacent to the immersed boundary are called ghost points (GPs),
as illustrated in Fig. 1. The interpolation procedure cannot be conducted on these GPs
directly. Thus, an image point (IP) is required, which is the mirror of GP along the
normal direction to the boundary. Thus, a boundary intercept (BI) point is defined as
the midway point between GP and IP. The unit normal vector n is also marked on
the BI point in Fig.1.
12
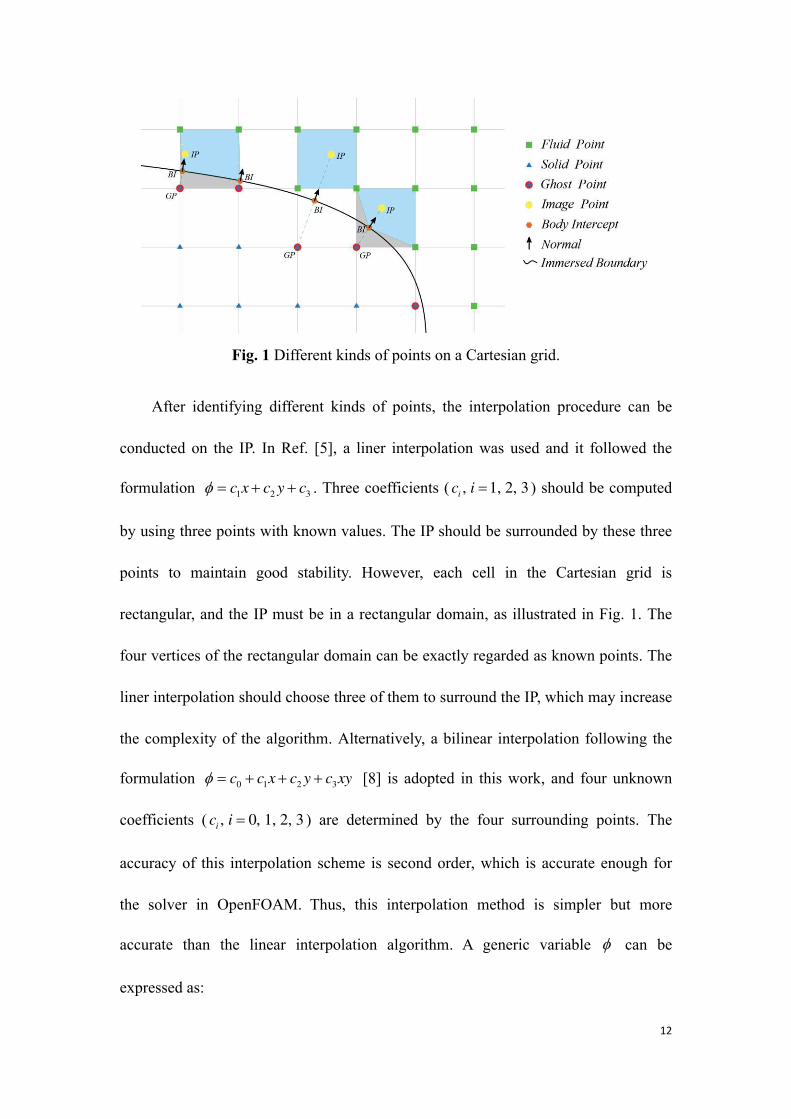
Fig. 1 Different kinds of points on a Cartesian grid.
After identifying different kinds of points, the interpolation procedure can be
conducted on the IP. In Ref. [5], a liner interpolation was used and it followed the
formulation 1 2 3c x c y c = + + . Three coefficients ( , 1, 2, 3i
c i = ) should be computed
by using three points with known values. The IP should be surrounded by these three
points to maintain good stability. However, each cell in the Cartesian grid is
rectangular, and the IP must be in a rectangular domain, as illustrated in Fig. 1. The
four vertices of the rectangular domain can be exactly regarded as known points. The
liner interpolation should choose three of them to surround the IP, which may increase
the complexity of the algorithm. Alternatively, a bilinear interpolation following the
formulation 0 1 2 3c c x c y c xy = + + + [8] is adopted in this work, and four unknown
coefficients ( , 0, 1, 2, 3i
c i = ) are determined by the four surrounding points. The
accuracy of this interpolation scheme is second order, which is accurate enough for
the solver in OpenFOAM. Thus, this interpolation method is simpler but more
accurate than the linear interpolation algorithm. A generic variable can be
expressed as:

13
TC = (14)
where 0 1 2 3, , ,T
C c c c c= is a coefficient vector, and 1, , ,T
x y xy = is
a coordinate vector that only depends on a local coordinate system ( ), x y . As
mentioned above, the coefficient vector C should be determined by four
surrounding points. However, if the surrounding point is just one GP, its
corresponding BI would be used. Then the interpolation domain changes from a
rectangle to the blue area in Fig. 1. The four surrounding points are marked as
, 0, 1, 2, 3i
P i = , which can be a fluid point or a BI point. Due to the particularity of
the BI point, Khalili et al. [9] considered multiple situations for interpolation
according to the number of the BI points in the interpolation domain. In the current
method, however, such complicated procedure is discarded, and only a judgment step
is required to determine the information type of a surrounding point. The flow
variables on the fluid point can be obtained from the flow field, while the values
on the BI point can be obtained by using the boundary conditions. The Dirichlet-type
boundary condition (Eq. (10)) is enforced on the BI point just like the fluid point. But
for the Neumann-type boundary conditions (Eqs. (11-13)), some modification is
required:
( )
( ) ( )1 3 2 3
0 1 2 3
, ,
, ,
0 ( )
x y
BI
x y
x y y x
n nn x y
c c y c c x n n
c n c n c xn yn c
=
= + +
= + + + +
(15)
where ( ), x y is the BI point coordinate, and ( ), x yn nn = is the unit normal vector
at the BI point.

14
The unknown coefficients C can be computed from the four surrounding points
with their flow information:
AC = (16)
1C A
−= (17)
where 0 1 2 3, , ,T
A = is a 4 4 matrix depending on the coordinate
information of the four surrounding points, and 0 1 2 3, , ,T = is a
generic variable vector. i and i
( 0, 1, 2, 3i = ) can be obtained by a judgment
step, based on the information type of i
P :
( )
( )
0, , ,
1, , ,
T
xi yi i yi i xi
iT
i i i i
Neumann boundary condn n x n y n itionat BI with
x y x y others
+ =
(18)
( )
( )
i
i
i
Neumann boundarat BI w yith conditionn
others
=
(19)
If iP is a BI point and the given boundary condition is the Neumann-type boundary
condition, Eq. (15) will be used.
Then the flow variables at the image point IP can be obtained as:
T
IP IPC = (20)
After obtaining the values at the IP, the flow variables at the GP can be
determined by using the boundary conditions on the immersed boundary. A linear
interpolation along the normal is employed. Different types of boundary conditions
need different formulas to calculate the values of flow variables at the GP:
( )
( )
2BI IP
GP
IP
BI
Dirichlet boundary condition
Neumann boundary conditionln
−= −
(21)
15
where l is the length of the normal probe from the GP to the IP.
3.3.1 Fresh points for a moving body
For the case of stationary body, the GPs can be identified initially. But for the
case of moving body, the GPs have to be updated at each time step. Fig. 2 shows the
process of immersed boundary moving from time level n to time level n+1. As a result,
a fluid point at time level n may become a newly emerged GP at time level n+1 when
the immersed boundary intrudes into the fluid domain, or a GP at time level n may
become a newly emerged fluid point (called “fresh point”, i.e., FP) at time level n+1
when the immersed boundary withdraws from the fluid domain. For the first situation,
the newly emerged GP can be regarded as a normal GP and the reconstruction
procedure is as usual. For the second situation, however, the FP is not possible to
devise a straightforward temporal discretization of the governing equations, since it
lacks a settled time history. Tran and Plourde [5] reconstructed the flow variables both
on ghost point and forcing point. The forcing points are the points with at least one
neighboring point inside the body. Since the FPs are included in the forcing points,
this method seems to be workable for the moving boundary problems. Nevertheless, it
is found that the FPs do not always appear, and this method also has to consume too
much computing time.

16
Fig. 2 The emergence of fresh point due to the boundary motion from time level n to time level n+1.
In the present method, the reconstruction procedure on the FP is similar to that of
GP. The interpolation domain changes from a rectangle to the blue area in Fig. 2, as
the FP is shifted to its corresponding BI point. The other three surrounding points are
marked as , 1, 2, 3i
P i = , which can be confirmed by:
( ) ( )( )( ) ( )( )
( ) ( ) ( )( )
1 1
2 2
3 3
, ,
, ,
, ,
FP x FP
FP FP y
FP x FP y
x y x sign n x y
x y x y sign n y
x y x sign n x y sign n y
= + = + = + +
(22)
where ( ), i ix y represents the coordinate of the iP , sign is the symbolic function,
and , x y are the mesh steps. If iP is a FP, it will be also shifted to its
corresponding BI point. And this manipulation is similar to that of GP. The flow
variables are directly interpolated to the FP:
T
FP FPC = (23)
At each time step, the layer of FP is required to be one layer depth at least to
guarantee the success of interpolation step. Considering the motion of immersed
boundary and its velocity, the time step should be constrained as

17
( )min , / ct x y U .
It should be clarified that the current interpolation procedure has some general
similarities with the method proposed by Mittal et al. [22]. However, their
interpolation stencil was always in a rectangular domain and the surrounding points
would contain other GPs. As a result, a point Gauss-Seidel method was used for these
coupled GPs. In the current method, if the surrounding point is just one GP, its
corresponding BI point will replace it. Consequently, the surrounding points only
include fluid points or BI points in the current interpolation stencil, as illustrated in
Figure 1. Then, the flow variables at the GP can be computed easier. Another
advantage of the current method is that the BI points are included in the surrounding
points and the boundary information is enforced into the interpolation procedure. The
second difference is the reconstruction procedure of FPs. Mittal et al. [22] used the
same method as GPs to calculate FPs. When the FP is in the fluid domain, the current
method directly uses surrounding points to perform the interpolation to obtain the
flow variables at the FP. Therefore, the calculation process is more concise.
3.3.2 Computing the forces on the body
For inviscid flows, only the pressure acting on the surface of body is required to
be computed. The BI point is treated as an interpolation point, and the pressure BIp
can be achieved by using Eq. (10). Then Eq. (7) can be rewritten as:
f BI i i
i
p dS p s
= − = − F n n (24)
where is is the arc length of the immersed boundary around the BI point. The
pressure coefficient at the BI point can be expressed as:
18
( ) 21/ 2
BIp
p pC
U
−= (25)
3.4 Solution procedure
To summary, the solution procedure of the current algorithm from time level n to
n+1 is given as follows:
1) For a passively moving body, solve its motion and get cU , c
X by using Eqs.
(5) and (6); Otherwise, cU and c
X are given in advance.
2) Update the position of immersed boundary, and determine fluid points, solid
points, FPs, GPs, IPs, and BI points;
3) Calculate values of flow variables ( , p and Tu ) at FPs by using Eq. (23), and
then the density at FPs is updated by using the equation of state;
4) Calculate values of flow variables ( , p and Tu ) at GPs by using Eq. (21), and
then the density at GPs is updated by using the equation of state;
5) Solve the governing equations of flow field, and compute the flow variables by
using OpenFOAM;
6) Calculate the resultant force fF by using Eq. (24);
7) Repeat Steps 1 to 6 until convergence is reached, and obtain 1 1 1, , n n np + + +
u
and 1nT
+ .
4. Numerical Examples
4.1 Stationary cases
4.1.1 Supersonic oblique shock
To test the accuracy of the present method, a supersonic flow over a 15° angle

19
wedge is simulated. This flow can produce a supersonic oblique shock, which has an
exact analytical solution. Two Mach numbers are considered, i.e., 3.0Ma = and
5.0Ma = . Supersonic inlet and zero-gradient outlet are adopted. Initial conditions are
chosen with 1p Pa= and 1T K= .
Fig. 3 Pressure contours at 3.0Ma = .
In current simulations, the rectangular computational domain is ( )1.5 , 1.0m m . A
very fine uniform Cartesian grid is used with the mesh size of 1500 1000 , and then
the mesh spacing is 0.001h m = . At 3.0Ma = , the pressure contours are exhibited
in Fig. 3. The slope starts at 0.5x m= , where the supersonic flow forms an oblique
shock wave. The wave surface of the oblique shock is very clear, which is attributed
to the good ability of the current method to handle the supersonic flow over a body.
Table 1 Comparison of theoretical and present numerical results obtained from the supersonic oblique shock configuration.
Case Flow variables Exact Present
1 3.0Ma = 2Ma 2.255 2.255
2 1/p p 2.822 2.821
inlet outlet
15°

20
2 1/T T 1.388 1.388
Shock-angle 32.24° 32.21° 1 5.0Ma =
2Ma 3.504 3.504
2 1/p p 4.781 4.781
2 1/T T 1.736 1.736
Shock-angle 24.32° 24.31°
Table 1 lists the theoretical and numerical results from pre-shock state (subscript
1) and post-shock state (subscript 2): post-shock Mach number 2Ma , pressure ratio
2 1/p p , temperature ratio 2 1/T T , and shock-angle that is the angle between the
oblique shock and the horizontal plane. The present results are in agreement with the
exact solution, and the accuracy of the current method is well displayed.
To assess the convergence rate of the current method, the case at 3.0Ma = is
simulated with different meshes. Four uniform grids of 75 50 , 150 100 ,
300 200 and 1500 1000 are used. The corresponding grid steps are 0.02h m = ,
0.01h m = , 0.005h m = and 0.001h m = , respectively. As illustrated in Table 1,
the exact solution of shock-angle is =32.24 o . The error of shock-angle e versus
grid steps in the log scale is plotted in Fig. 4. From the figure, it is found that the slope
of the line is about 1.7. Although the accuracy of the interpolation scheme is second
order in the current IBM, some discrete schemes in the rhoCentralFoam solver are
only first-order. Therefore, the overall accuracy of the current solver is less than the
second-order.

21
Fig. 4 Convergence of numerical error versus grid step for supersonic oblique shock.
4.1.2 Transonic flow around a stationary airfoil
To verify the robustness of the present method, a flow around an
irregular-shaped object is simulated in this section. Here, a NACA0012 airfoil is
considered. Two transonic flows are selected, in which the free-stream Mach number
and angle of attack are: (a) 0.8, 1.25Ma = = o and (b) 0.85, 1Ma = = o . The
same problem has been simulated in previous work [25-27]. The computational
domain is 28 20c c with the mesh size of 511 251 , where c is the chord length
of airfoil, and the airfoil is located at ( )10 , 10c c . The region around the airfoil is
1.2 0.2c c , and a fine uniform mesh with the spacing of 0.005h c= is adopted.
h/m
e
10-4
10-3
10-2
10-110
-4
10-3
10-2
10-1
slope=1.7

22
(1) (2)
(3) (4)
Fig. 5 Pressure contours (1) and (3), Mach number contours (2) and (4), with different flows 0.8, 1.25Ma = = o (1-2) and 0.85, 1Ma = = o (3-4).
The pressure and Mach number contours are presented in Fig. 5. For the case of
0.8, 1.25Ma = = o , there are a relatively strong shock on the upper surface of the
airfoil and a weak shock on the lower surface of the airfoil, as illustrated in Figs. 5(1)
and 5(2). For the case of 0.85, 1Ma = = o , however, it is indicated that such
problem is not easy to be handled [25, 26]. The strong shock appears on both the
upper surface and the lower surface, as shown in Figs. 5(3) and 5(4).

23
(1) (2) Fig. 6 Pressure coefficient on the upper and lower airfoil surfaces compared to
reference results with different flows (1) 0.8, 1.25Ma = = o and (2)0.85, 1Ma = = o .
Fig. 6 shows the pressure coefficient pC− on the upper and lower airfoil
surfaces. From the figure, it can be found that the present results compare well with
the results of previous work [27, 28]. At 0.8, 1.25Ma = = o , the shock positions on
the upper and lower airfoil surfaces are accurately predicted. Although the case (b) is
difficult to simulate, the current method still can accurately predict the position of the
upper and lower surface shock waves.
Based on two problems above, the sharp-interface IBM in this study has been
proved to be able to deal with stationary boundary problems accurately.
4.2 Moving cases
4.2.1 Piston moving with supersonic velocity
x/c
-Cp
0 0.2 0.4 0.6 0.8 1-1.5
-1
-0.5
0
0.5
1
1.5
Upper_Present
Lower_Present
Upper_Liu and Hu
Lower_Liu and Hu
x/c
-Cp
0 0.2 0.4 0.6 0.8 1-1.5
-1
-0.5
0
0.5
1
1.5
Upper_Present
Lower_Present
Upper_Amaladas and Kamath
Lower_Amaladas and Kamath

24
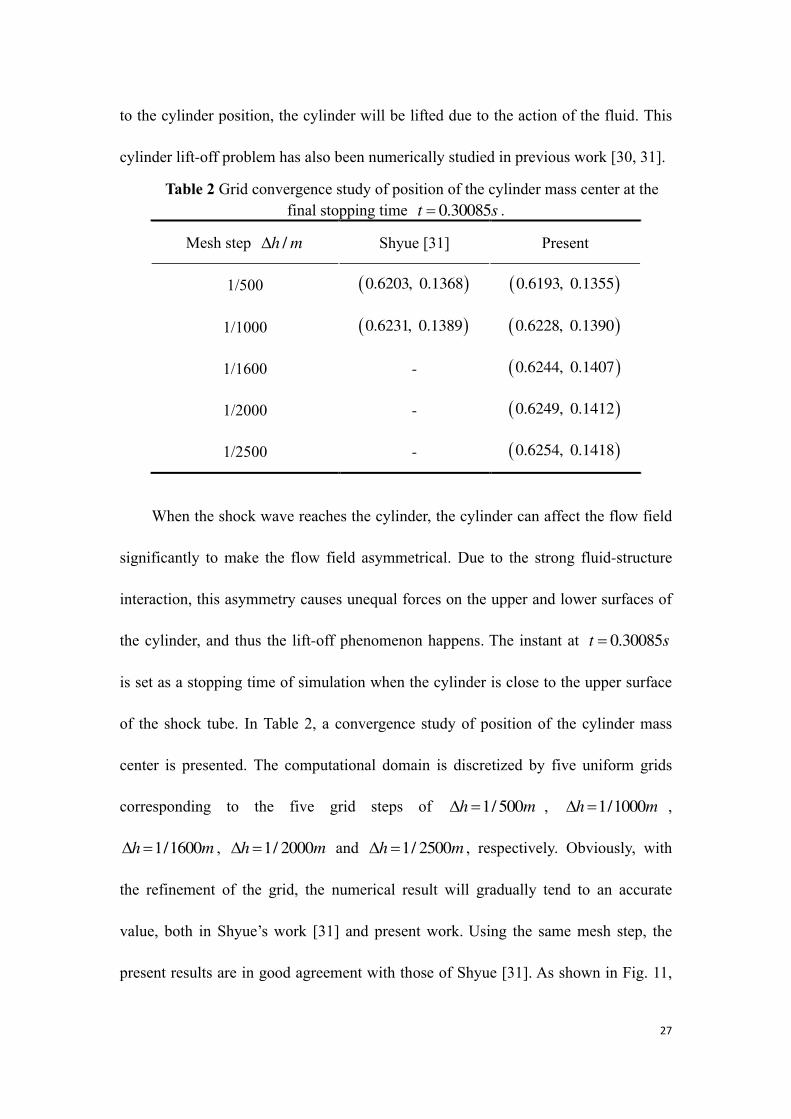
Fig. 7 Schematic diagram of piston movement.
To further validate the current method, the moving body problems will be
simulated. The first one is a piston moving at a constant speed of 2.0Ma = in a
quiescent fluid. The movement sketch is shown in Fig. 7. The thickness of the piston
is L , and it is located in the middle of a shock tube initially. The shock tube has a
length of 128L and a width of 4L . In the whole computational domain, the
parameters of the initial quiescent fluid are 0 /u v m s= = , 1p Pa= , and 1T K= .
Then the piston is given a sudden velocity with 2.0Ma = . The same problem has
also been simulated in previous studies [19, 20, 29], and it has an analytical solution.
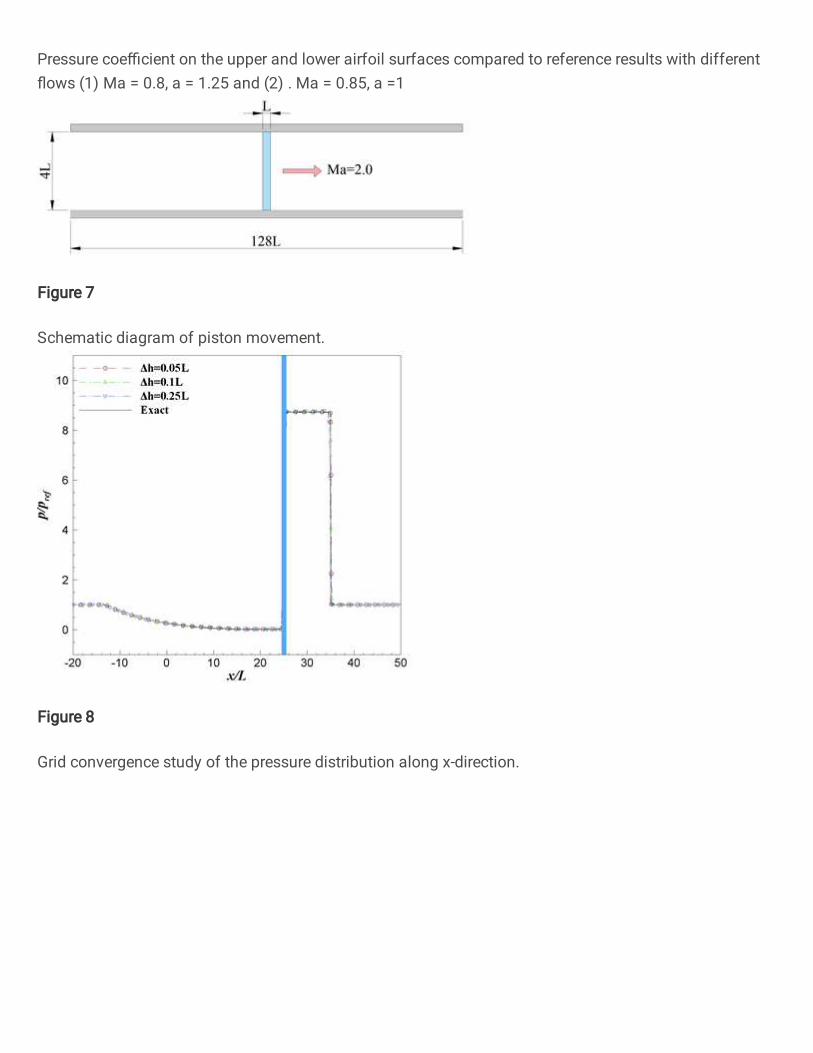
Fig. 8 Grid convergence study of the pressure distribution along x-direction.
25
The computational domain with the size of 128 4L L is discretized by using
three different uniform grids with 512 16 , 1280 40 and 2560 80 . These three
grids correspond to the three mesh steps of 0.25h L = , 0.1h L = and 0.05h L = ,
respectively. The computations are performed till the instant of 25 / pistont L u= , where
pistonu is the velocity of the piston. Fig. 8 shows the pressure distribution along
x-direction with different mesh steps. The piston is represented by a blue strip in the
figure. 1refp Pa= is the reference pressure. Obviously, the result from fine mesh is
closer to the exact solution than that from coarse mesh, especially at the corners of the
curve. However, even for the coarsest mesh, the calculated result is generally in good
agreement with the exact solution. Thus, it means that the current method has good
robustness, and the satisfactory result can be obtained even at a relatively coarse grid.
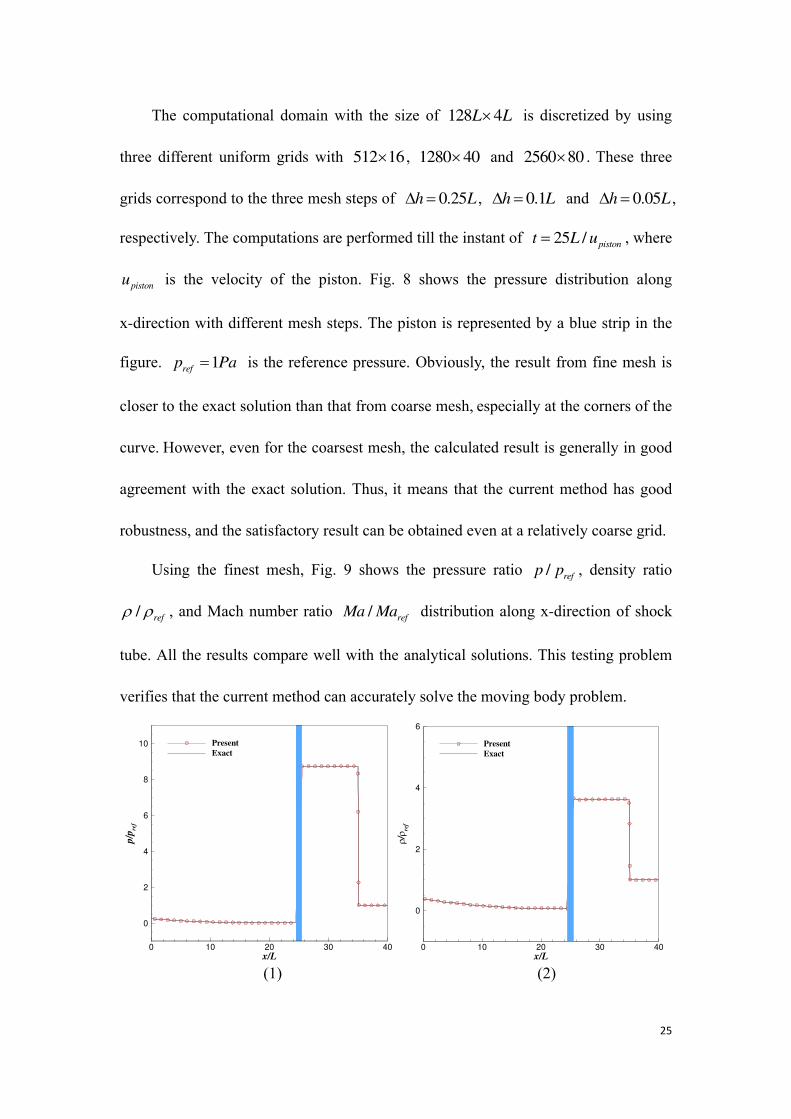
Using the finest mesh, Fig. 9 shows the pressure ratio /ref
p p , density ratio
/ ref , and Mach number ratio /ref
Ma Ma distribution along x-direction of shock
tube. All the results compare well with the analytical solutions. This testing problem
verifies that the current method can accurately solve the moving body problem.
(1) (2) x/L
p/p
ref
0 10 20 30 40
0
2
4
6
8
10 Present
Exact
x/L
/ r
ef
0 10 20 30 40
0
2
4
6
Present
Exact

26
(3)
Fig. 9 Comparison of (1) pressure, (2) density and (3) Mach number distribution along x-direction with analytical results at the finest mesh 0.05h L = .
4.2.2 Lift-off of a cylinder
Fig. 10 Schematic diagram of cylinder lift-off.
The second moving body problem to be simulated is a rigid cylinder whose
motion is induced by the fluid. This problem takes place in a shock tube, whose
domain size is 1 0.2m m , as illustrated in Fig. 10. At the initial moment, a shock
wave with Mach 3 is located at 0.08x m= , which is traveling from left to right. The
pre-shock state, which is on the right of the shock, is at rest with 1p Pa= , 1T K= ,
and 0 /u v m s= = . The flow variables at the post-shock state can be calculated from
the total temperature. The radius of rigid cylinder is 0.05m, which is at rest initially on
the floor of the shock tube. The center of the cylinder is initially at ( )0.15 , 0.05m m ,
and the density of the cylinder is 310.77 /kg m . When the Mach 3 shock wave moves
x/L
Ma/M
are
f
0 10 20 30 40
0
2
4
6
Present
Exact
27
to the cylinder position, the cylinder will be lifted due to the action of the fluid. This
cylinder lift-off problem has also been numerically studied in previous work [30, 31].
Table 2 Grid convergence study of position of the cylinder mass center at the final stopping time 0.30085t s= .
Mesh step /h m Shyue [31] Present
1/500 ( )0.6203, 0.1368 ( )0.6193, 0.1355
1/1000 ( )0.6231, 0.1389 ( )0.6228, 0.1390
1/1600 - ( )0.6244, 0.1407
1/2000 - ( )0.6249, 0.1412
1/2500 - ( )0.6254, 0.1418
When the shock wave reaches the cylinder, the cylinder can affect the flow field
significantly to make the flow field asymmetrical. Due to the strong fluid-structure
interaction, this asymmetry causes unequal forces on the upper and lower surfaces of
the cylinder, and thus the lift-off phenomenon happens. The instant at 0.30085t s=
is set as a stopping time of simulation when the cylinder is close to the upper surface
of the shock tube. In Table 2, a convergence study of position of the cylinder mass
center is presented. The computational domain is discretized by five uniform grids
corresponding to the five grid steps of 1/ 500h m = , 1/1000h m = ,
1/1600h m = , 1/ 2000h m = and 1/ 2500h m = , respectively. Obviously, with
the refinement of the grid, the numerical result will gradually tend to an accurate
value, both in Shyue’s work [31] and present work. Using the same mesh step, the
present results are in good agreement with those of Shyue [31]. As shown in Fig. 11,

28
Shyue [31] provided the pressure contours at two different moments, i.e., 0.1641t s=
and 0.30085t s= . Similarly, Fig. 12 shows the current results at the same instants.
From two figures, it is found that the position of shock waves is captured accurately
by the present method. This testing problem completely demonstrates the robustness
and accuracy of the present sharp-interface IBM.
(1)
(2)
Fig. 11 Pressure contours computed by Shyue [31] at different time: (1) 0.1641t s= , and (2) 0.30085t s= .
(1)
(2) Fig. 12 Present pressure contours ( 1/ 2000h m = ) at different time: (1) 0.1641t s= ,
and (2) 0.30085t s= .

29
5. Conclusions
A robust sharp-interface immersed boundary method is proposed in this work for
simulating high-speed inviscid compressible flows over stationary and moving bodies.
The Euler equations are discretized on a Cartesian grid and solved by the
rhoCentralFoam solver in the platform of OpenFOAM. The interaction of flow and
body boundary is handled by using a ghost-cell IBM. A bilinear interpolation method
is employed to robustly interpolate the flow variables at an image point corresponding
to those at a ghost point, as well as to satisfy the boundary conditions. The velocity
around the body boundary is decomposed into the normal and tangential components.
The normal component satisfies the no-penetration boundary condition, which is the
Dirichlet-type boundary condition. The tangential component together with the
pressure and the temperature satisfy the Neumann-type boundary conditions at the
immersed boundary. Finally, the density is reconstructed via the equation of state at
ghost points. Additionally, a newly emerged fresh point may appear when the body
moves. The flow variables at fresh points are reconstructed by using a method similar
to the reconstruction of ghost points.
To validate the robustness and accuracy of the proposed method for high-speed
inviscid compressible flows over stationary and moving bodies, four simulations are
performed: supersonic flow over a 15° angle wedge, transonic flow past a stationary
airfoil, a piston moving with supersonic velocity, and a rigid circular cylinder lift-off.
It is shown that the results from the current method are in good agreement with the
data in literature. As the future work, the current sharp-interface IBM can be extended

30
to simulate high-speed viscous compressible flows together with the turbulence model
for high Reynold number situation.
Acknowledgements
This work is supported by the Priority Academic Program Development of
Jiangsu Higher Education Institutions (PAPD).
Author’s contributions
The first author finished the numerical simulations, and all authors were involved
in writing the manuscript. All authors read and approved the final manuscript.
Funding
Natural Science Foundation of Jiangsu Province (Grant No. BK20191271) and
the National Numerical Wind Tunnel Project (Grant No. NNW2019ZT2-B28).
Availability of data and materials
All data and materials are available upon request.
Competing interests
The authors declare that they have no competing interests.
References
[1] Monasse L, Daru V, Mariotti C, Piperno S, Tenaud C (2012) A conservative
coupling algorithm between a compressible flow and a rigid body using an
Embedded Boundary method. J Comput Phys 231: 2977-2994.
[2] Arienti M, Hung P, Morano E, Shepher J (2003) A level set approach to

31
Eulerian-Lagrangian coupling. J Comput Phys 185: 213-51.
[3] Kazem H, Saman R (2019) Numerical simulation of shock-disturbances
interaction in high-speed compressible inviscid flow over a blunt nose using
weighted essentially non-oscillatory scheme. Wave Motion 88: 167-195.
[4] Courant JWR, Friedrichs KO (1976) Supersonic Flow and Shock Waves.
Springer-Verlag, NewYork.
[5] Tran PH, Plourde F (2014) Computing compressible internal flows by means of
an Immersed Boundary Method. Comput Fluids 97: 21-30.
[6] Slone AK, Pericleous K, Bailey C, Cross M (2002) Dynamic fluid-structure
interaction using finite volume unstructured mesh procedures. Comput Struct 80:
371-390.
[7] Udaykumar HS, Shyy W, Rao M (1996) Elafint: a mixed Eulerian-Lagrangian
method for fluid flows with complex and moving boundaries. Int J Numer
Methods Fluids 22: 691-712.
[8] Qu YG, Shi RC, Batra RC (2018) An immersed boundary formulation for
simulating high-speed compressible viscous flows with moving solids. J
Comput Phys 354: 672-691.
[9] Khalili ME, Larsson M, Müller B (2018) Immersed boundary method for
viscous compressible flows around moving bodies. Comput Fluids 170: 77-92.
[10] Peskin CS (1977) Numerical analysis of blood flow in the heart. J Comput Phys
25: 220-252.
[11] Huang WX, Tian FB (2019) Recent trends and progress in the immersed
boundary method. J Mech Eng Sci 233(23-24): 7617-7636.
[12] Cui Z, Yang ZX, Jiang HZ (2018) A sharp-interface immersed boundary method
for simulating incompressible flows with arbitrarily deforming smooth
boundaries. Int J Comput Methods 15: 1750080.
[13] Constant E, Favier J, Meldi M, Meliga P, Serre E (2017) An immersed boundary
method in OpenFOAM: Verification and validation. Comput Fluids 157: 55-72.
[14] Riahi H, Meldi M, Favier J, Serre E, Goncalves E (2018) A pressure-corrected
Immersed Boundary Method for the numerical simulation of compressible flows.

32
J Comput Phys 374: 361-383.
[15] Yang X, Zhang X, Li Z, He GW (2009) A smoothing technique for discrete delta
functions with application to immersed boundary method in moving boundary
simulations. J Comput Phys 228: 7821-7836.
[16] Wang JJ, Li YD, Wu J, Qiu FS (2020) A variable correction-based immersed
boundary method for compressible flows over stationary and moving bodies.
Adv Appl Math Mech 12(2): 545-563.
[17] Wang L, Currao G, Han F, Neely AJ, Young J, Tian FB (2017) An immersed
boundary method for fluid-structure interaction with compressible multiphase
flows. J Comput Phys 346: 131-151.
[18] Sotiropoulos F, Yang, X (2014) Immersed boundary methods for simulating
fluid-structure interaction. Prog Aerosp Sci 65: 1-21.
[19] Schneiders L, Günther C, Meinke M, Schröder W (2016) An efficient
conservative cut-cell method for rigid bodies interacting with viscous
compressible flows. J Comput Phys 311: 62-86.
[20] Muralidharan B, Menon S (2018) Simulation of moving boundaries interacting
with compressible reacting flows using a second-order adaptive Cartesian
cut-cell method. J Comput Phys 357: 230-262.
[21] Shuvayan B, Ganesh N, Vinayak K, Niranjan S (2016) A sharp-interface
immersed boundary method for high-speed compressible flow. 18th Annual
CFD Symposium CFD Division-Aeronautical Society of India.
[22] Mittal R, Dong H, Bozkurttas M, Najjar F, Vargas A, von Loebbecke A (2008) A
versatile sharp interface immersed boundary method for incompressible flows
with complex boundaries. J Comput Phys 227: 4825-4852.
[23] Kurganov A, Tadmor E (2000) New high-resolution central schemes for
nonlinear conservation laws and convection-diffusion equations. J Comput Phys
160: 241-282.
[24] Udaykumar HS, Mittal R, Rampunggoon P, Khanna A (2001) A sharp interface
Cartesian grid method for simulating flows with complex moving boundaries. J
Comput Phys 174: 345-380.

33
[25] Jawahar J, Kamath H. (2000) A high-resolution procedure for Euler and
Navier-Stokes computations on unstructured grids. J Comput Phys 164:
165-203.
[26] Dadone A, Grossman B (2002) An immersed body methodology for inviscid
flows on Cartesian grids. AIAA 2002-1059.
[27] Liu C, Hu CH (2017) An immersed boundary solver for inviscid compressible
flows. Int J Numer Meth Fluids 85: 619-640.
[28] Amaladas JR, Kamath H (1998) Accuracy assessment of upwind algorithms for
steady-state computations. Comput Fluids 27(8): 941
[29] Murman SM, Aftosmis MJ, Berger MJ (2003) Implicit approaches for moving
boundaries in a 3-D Cartesian method. AIAA 2003-1119.
[30] Tan SR, Shu WC (2011) A high order moving boundary treatment for
compressible inviscid flows. J Comput Phys 230: 6023-6036.
[31] Shyue KM (2008) A moving-boundary tracking algorithm for inviscid
compressible flow. in: Hyperbolic Problems: Theory, Numerics, Applications,
Springer-Verlag, 989-996.

Figures
Figure 1
Different kinds of points on a Cartesian grid.
Figure 2
The emergence of fresh point due to the boundary motion from time level n to time level n+1.

Figure 3
Pressure contours at Ma = 3.0
Figure 4
Convergence of numerical error versus grid step for supersonic oblique shock.

Figure 5
Pressure contours (1) and (3), Mach number contours (2) and (4), with different �ows (1-2) and (3-4).
Figure 6
Pressure coe�cient on the upper and lower airfoil surfaces compared to reference results with different�ows (1) Ma = 0.8, a = 1.25 and (2) . Ma = 0.85, a =1
Figure 7
Schematic diagram of piston movement.
Figure 8
Grid convergence study of the pressure distribution along x-direction.
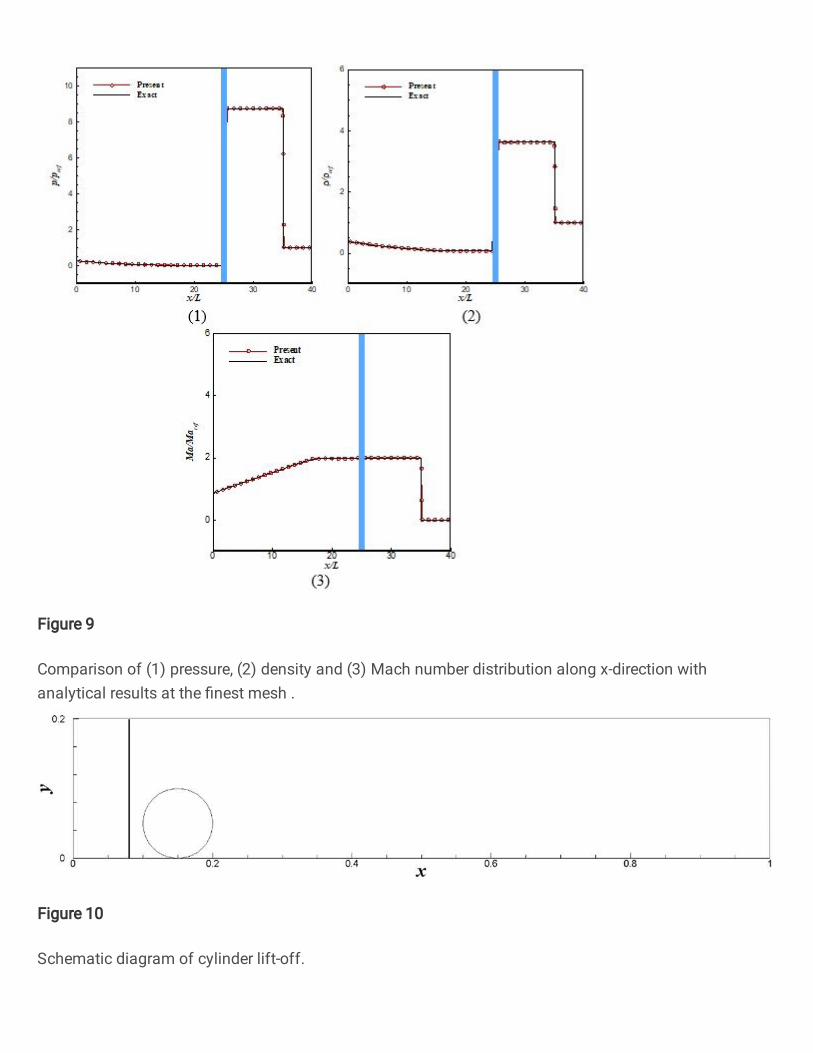
Figure 9
Comparison of (1) pressure, (2) density and (3) Mach number distribution along x-direction withanalytical results at the �nest mesh .
Figure 10
Schematic diagram of cylinder lift-off.

Figure 11
Pressure contours computed by Shyue [31] at different time: (1) t = 0.1641s , and (2) t = 0.30085s .
Figure 12
Present pressure contours ( ) at different time: (1) t = 0.1641s , and (2) t = 0.30085s