9.2. vektorsko upravljanje asinhronim motorom · ostvaraje i rotor ubrzava do 6000 o/min. kada se...
TRANSCRIPT

9. Računarske simulacije mikroprocesorski regulisanih EMP 5 ____________________________________________________________________________________________________________________________________________________
9.2. Vektorsko upravljanje asinhronim motorom
U ovom poglavlju su dati rezultati računarskih simulacija rada vektorskog pogona sa asinhronim motorom (AM) koji je upravljan po brzini. Pogon se upravlja vektorski sa d osom koja je paralelna sa vektorom fluksa rotora. Pogonu je prvo zadata referentna brzina obrtanja rotora od 2000 o/min koja je u šestom sekundu simulacionog vremena promenjena na 6000 o/min. Pogon je prvo neopterećen, a zatim u trećem sekundu simulacionog vremena opterećen sa momentom od 1Nm. Parametri motora su Rs = 3.26Ω, Rr = 0.99Ω, Lm = 0.071H, Ls = 0.0739H, Lr = 0.0739H, Tr=74ms, p=2, sprega zvezda. Pošto je snaga AM manja od 1kW pretpostavka je da se napaja preko trofaznog invertora napajanog monofazno, sa srednjom vrednošću napona jednosmernog međukola Udc ≈ 310V i maksimalnim linijskim naponom na izlazu invertora UL-L
MAX=220V⋅0.95 ≈ 210Vrms. Maksimalna linijska struja invertora je 8Arms. Za nominalnu brzinu motora je izabrana ona brzina pri kojoj se pri nominalnom fluksu dostize maksimalni mogući linijski napon invertora. Ta brzina iznosi približno 4200 o/min. Za rad na brzinama većim od nominalne nephodno je umanjiti fluks motora. Na slici 9.2.1 su prikazane ostvarena brzina i elektromagnetni moment AM.
Slika 9.2.1. Brzina rotora i moment koji razvija AM
Sa slike 9.2.1 je jasno da pogon dostiže referentnu brzinu tako što menja moment koji motor predaje vratilu. Od stanja mirovanja do 2000 o/min AM stiže impulsom momenta 1 koji je veći od nultog momenta opterećenja i dovodi do pozitivnog priraštaja brzine. Ovaj moment se naziva i dinamički moment, jer utiče na promenu brzine. Jednom kada je brzina dostignuta, dinamički moment koji AM razvija pada na nulu 2 jer je i opterećenje jednako nuli, time se ostvaruje ravnoteža momenta (4.1), i brzina ostaje nepromenjena. U datom primeru su parametri PI regulatora brzine podešeni tako da je prelaz brzine sa 0 na 2000 o/min aperiodičan 3, tj. bez prebačaja ili oscilacija oko zadate brzine. U trećoj sekundi simulacionog vremena na vratilo se dovodi opterećenje i narušena je ravnoteža momenta motora i tereta. Pogon počinje da usporava (brzina pada, 4). Ovo izaziva reakciju regulatora brzine koji na osnovu greške između referentne i ostvarene brzine uvećava zadati moment koji AM treba da
0 1 2 3 4 5 6 7 8 90
1000
2000
3000
4000
5000
6000
1
2
3 4
5
6
0
1
2
3
4
5
6nr [o/min] mel [Nm]
t [s]
nr
mel

6 9. Dodatni materijal za knjigu MUEP ____________________________________________________________________________________________________________________________________________________
ostvari. Pošto je u pitanju vektorski upravljani pogon taj moment se i ostvaruje i brzina se nakon prelaznih procesa vraća na zadatih 2000 o/min 5. Povratak je i dalje aperiodičan, tj. bez prebačaja ili oscilacija. Tokom povratka na brzinu 2000 o/min pogon je razvijao dinamički moment veći od momenta tereta koji je iznosio 1Nm, i time je ostvaren pozitivan gradijent brzine rotora. U stacionarnom stanju razvijeni moment se ponovo izjednačava sa novim momentom opterećenja (1Nm) i brzina ostaje konstanta. U šestom sekundu simulacionog vremena pogon ubrzava do 6000 o/min. Da bi se to ostvarilo, regulator brzine zadaje dinamički moment koji je veći od 1Nm 6. Ovaj moment vektorski upravljan AM ostvaraje i rotor ubrzava do 6000 o/min. Kada se ova brzina dostigne, puls momenta motora prestaje i opet se uspostavlja momenta ravnoteža.
9.2.1. Nezavisno upravljanje momentom i fluksom AM
Upravljanje momentom koji pogon razvija omogućuje potrebnu dinamiku pri regulaciji brzine i pozicije pogona dok se upravljanjem fluksom ostvaruje optimalan rad pogona i po potrebi kontroliše indukovana EMS na statoru. Vektorsko upravljanje ostvaruje nezavisno upravljanje fluksom i momentom AM kontrolom vektora struje statora. Tačnije, u rotacionom dq koordinatnom sistemu koji je paralelan sa vektorom fluksa rotora AM, q komponenta vektora struje statora kontroliše moment, a d komponenta amplitudu fluksa rotora. Na slici 9.2.2 su prikazane promene ostvarene d i q komponente vektora struje statora tokom promene brzine i opterećenja AM datih na slici 9.2.1. Ostvarene komponente strujnog vektora su bliske onima koje zadaju regulator brzine iqs
* i regulator fluksa ids*. Razlog za to je
podređena strujna regulacija koja sa dovoljnom naponskom marginom uvek podesi vektor napona statora tako da se u motor utisne vektor struje čije su d i q komponenta u rotirajućem koordinatnom sistemu vezanom za fluks rotora jednake zadatim, poglavlje 6.3.
Slika 9.2.2. Komponente vektora struje statora AM (fazne) u sinhrono-rotirajućem sistemu.
Vremenski dijagrami d i q komponenti struje statora pojašnjavaju način na koji vektorski pogon sa AM ostvaruje potreban fluks u mašini i razvija potreban elektromagnetni moment.
0 1 2 3 4 5 6 7 8 90
0.5
1
1.5
2
2.5
3
3.5
4
ids [A]
iqs [A]
1
2
3
4
5
6
t [s]

9. Računarske simulacije mikroprocesorski regulisanih EMP 7 ____________________________________________________________________________________________________________________________________________________
Nominalna vrednost d komponente struje statora obezbeđuje nominalni fluks rotora u mašini 1. Iz tog razloga je uobičajeno da se pre starta pogona zada konstantna nominalna vrednost d komponente struje statora. Dinamika uspostavljanja fluksa rotora zavisi od
vremenske konstante rotora Tr=Lr/Rr i modeluje se sa . U praksi je potrebno
odložiti start motora za vreme (3−5) Tr kako bi se ostvarilo predmagnećenje mašine. Nakon toga vremena se može smatrati da je željeni nivo rotorskog fluksa dostignut. Nakon što je fluks rotora uspostavljen, s 0 , nastaje linearna veza
između q komponente struje statora i momenta koji AM ostvaruje,
. Ovo
je osnovni doprinos vektorskog upravljanja koje omogućuje da regulator brzine AM kontrolom zadate vrednosti struje q ose linearno kontroliše moment. Ovim AM postaje upravljiv kao i JM pošto upravljanje strujom q ose AM daje isti rezultat kao i upravljanje strujom armature JM. Sa grafika 2 se vidi da impuls q komponente struje statora, uz konstantni rotorski fluks, dovodi do impulsa momenta AM 2 istog oblika koji inicira zalet pogona ka 2000 o/min. Kada se završi zalet, odnosno motor dostigne zadatu brzinu, q komponenta struje pada na nulu pošto je motor neopterećen. Nakon pojave opterećenja u t= 3s, regulator brzine reaguje i struja q raste 3 na vrednost potrebnu da se izjednačene razvijeni moment i moment opterećenja. Novi impuls struje u t=5s nastaje usled nove komande brzine i potrebe za ubrzanjem tj. momentom većim od momenta opterećenja. Komponenta d struje statora je i dalje konstantna i zadržan je nominalni fluks u AM. Nominalni nivo fluksa rotora se ne može zadržiti i pri većim brzinama, jer bi amplituda indukovane EMS prešla maksimalni napon koji CRVSI može da ostvari. Tada CRVSI ne bi imao dovoljno naponsku marginu potrebnu da „pobedi“ indukovanu EMS i utisne zadate struje u motor, pa fluks i moment AM ne bi više bili kontrolisani. Za dati AM je izračunato da EMS indukovana u q osi pri nominalnom rotorskom fluksu u d osi i brzini od
4200 o/min iznosi ∼ ω ∼180V. Ova vrednost je bliska maksimalnoj amplitudi
faznog napona AM u sprezi zvezda napajanog iz monofazno trofaznog invertora, !"# $% √3⁄ 230⋅√2 √3⁄ V∼187V (u slučaju AM u sprezi delta !∆"# $% √2⋅230V naponska margina bi bila veća). Iz tog razloga pri ubrzanju ka 6000 o/min, koje pokreće impuls q struje 4, pogon nakon 4200 o/min prelazi u režim slabljenja polja 5 u kojem se d komponenta struje dalje umanjuje sa brzinom po 1/ωdq zakonu. Na taj način se član ω drži konstantnim i zadržava relativno konstanta amplituda fazne EMS koja je dovoljno ispod maksimalne amplitude faznog napona koju CRVSI može da ostvari. Tako je i na brzinama većim od nominalne omogućena kontrola faznih struja koja bi bila narušena da je indukovana EMS postala veća od maksimalnog napona statora. Pad fluksa utiče na razvijeni moment (proporcionalan proizvodu fluksa i momenta tj. proizvodu d i q komponente struje statora) tako da se taj pad mora kompenzivati porastom q komponente struje, 6. Ovaj porast q struje je rezultat rada brzinskog regulatora koji tim porastom zadržava potrebni moment. Na slici 9.2.3 je dato dodatno pojašnjenje kako je vektorski pogon sa AM upravljao vektorom fluksa rotora i razvijenim momentom prilikom promena brzine datih na slici 9.2.1. Na gornja dva grafika su prikazane d i q komponente vektora rotorskog fluksa. Pošto pogon ne može da razvije moment ako ne postoji fluks rotora, isti je potrebno uspostaviti pre starta pogona. Ovo se ostvaruje zadavanjem konstante nominalne d komponente struje uz q struju jednaku nuli. Sledećih (3 −5) Tr se uspostavlja fluks rotora po dinamici (6.67) dok pogon miruje. U pogonu je tokom intervala magnetizacije zadata struja q jednaka nuli, dakle i klizanje je jednako nuli. Frekvencija statorskog polja, kao zbir nultog klizanja i nulte frekvencije rotora koji miruje je ukupno nula tako da nema uslova za pokretanje rotora. U ovom režimu struja statora ima samo jednosmernu komponentu, kao i fluksevi statora i rotora.

8 9. Dodatni materijal za knjigu MUEP ____________________________________________________________________________________________________________________________________________________
Nakon (3 −5) Tr fluks rotora u d osi dostiže nominalnu vrednost dok je fluks u q osi rotora jednak nuli. Tokom daljeg rada pogona vrednost fluksa rotora u q osi se održava na nuli, što je preduslov raspregnutog upravljanja fluksom i momentom. Vektorski pogon na osnovu modela rotora proračunava položaj d ose tako da se poklapa sa položajem vektora fluksa rotora, što čini q komponentu fluksa jednakom nuli. Ukoliko bi taj račun imao grešku, na primer radi sa pogrešnim parametrom Tr, javila bi se i q komponenta fluksa rotora. U tom slučaju bi promena struje statora u d osi usled nenultog fluksa u q osi uticala na moment, što nije cilj. U dobro podešenom pogonu promena struje d ose utiče samo na fluks d ose, pa i na amplitudu vektora fluksa rotora. Nominalna vrednost d struje drži fluks na nominalnom nivou, i tako sve do ulaska u režim slabljenja polja. Tada nestaje napona i fluks rotora mora da se smanji da bi se smanjila i indukovana EMS. Komponentom fluksa u d osi (ujedno i amplitudom vektora fluksa rotora) upravljamo strujom d ose, koju on prati po dinamici (6.67). Na grafiku 9.2.3. je prikazana promena učestanosti klizanja sa promenom opterećenja i brzine. Pošto je stacionarna vrednost klizanja praktično definisana sa odnosom struja d i q ose, ω+ 1/-.///0 jasno je da je pri malim brzinama obrtanja, uz konstantnu d struju, klizanje proporcionalno q struji. Dok nije zadat start pogona klizanje je bilo nula. Samim tim je i motor bio ukočen sa jednosmernim poljem koje je održavalo fluks rotora na nominalnoj ili nekoj drugoj vrednosti koja je pogodnija za start. Kod nekih pogona sa startnim momentom većim od nominalnog start se vrši sa povišenim fluksom rotora koji uvodi pogon u zasićenje ali za istu struju ipak omogućava veći moment. U datom primeru startni fluks je jednak nominalnom i d struja ostaje ista tokom starta i pri malim brzinama. Pri startu pogona pojavljuje se q struja, dakle klizanje koje pravi nenulto polje koje preseca rotorske šipke i uspostavlja se moment. Na malim brzinama, uz konstantu struju d ose, klizanje je proporcionalno struji u q ose, tj. momentu. Na velikim brzinama, kada struja d ose opada sa brzinom, klizanje raste za isto opterećenje jer opada imenioc ω+ 1/-.///0. Iz ove jednačine jasno je da je klizanje različito od nule kada god motor razvija moment (q komponenta struje je različita od nule), i kada u njemu postoji fluks (d komponenta struje različita od nule). Ovo važi pri bilo kojoj brzini obrtanja, čak i kada rotor miruje.
Slika 9.2.3. Rezultati simulacija rada vektorskog pogona sa AM upravljanog po brzini. a)
komponente vektora fluksa rotora u d i q osi, b) ostvareni elektromagnetni moment, c) ugaona učestanost klizanja, d) referentne struje statora korišćene za račun klizanja klizanja.
0 1 2 3 4 5 6 7 8 90
0.1
0.2
0 1 2 3 4 5 6 7 8 90
1
2
0 1 2 3 4 5 6 7 8 90
10
20
0 1 2 3 4 5 6 7 8 90
2
4ids [A]
ωk [rad/s]
mel [Nm]
Ψdr [Wb] a)
b)
c)
d)t [s]
Ψqr [Wb]
iqs [A]

9. Računarske simulacije mikroprocesorski regulisanih EMP 9 ____________________________________________________________________________________________________________________________________________________
Način na koji se regulišu fluks i moment se jasnije vidi kod vektorskog AM pogona regulisanog po momentu, a ne po brzini. Na slici 9.2.4. date su karakteristične veličine indirektno upravljanog vektorskog pogona koji umesto regulatora brzine poseduje regulator momenta kome je zadat impuls momenta od 1Nm u trajanju od 0.8 sekundi. Pogon ubrzava od stanja mirovanja i nakon 0.8 sekundu se impuls momenta ukida i ubrzanje neopterećenog pogona prekida na brzini do koje se do tada zaleteo, ∼6600 o/min. Na toj brzini pogon je uveliko u režimu slabljenja polja i radi sa maksimalnim mogućim naponom. Na prvom grafiku na slici 9.2.4. prikazana je brzina koja linearno raste jer je moment motora konstantan, a moment tereta jednak nuli (brzina se linearno menja kada je razlika između momenta motora i momenta tereta konstantna) 1. Na relativno malim brzinama d struja je na nominalnoj vrednosti tako da se i fluks rotora nalazi na nominalnoj vrednosti, 2. Moment se linearno reguliše sa q strujom čija konstanta vrednost, uz konstantnu d struju na malim brzinama, obezbeđuje konstantan moment, drugi grafik. Oblik momenta identičan je obliku q komponente struje. U zoni nominalnog fluksa klizanje je konstantno, jer su sve veličine u ω+ 1 -⁄ . ⁄ 0 konstantne, četvrti grafik. Slično kao i u režimu regulacije brzine i u režimu regulacije momenta nakon 4200 o/min pogon održava svoj napon statora konstantnim i ispod maksimalnog mogućeg. Sa daljim porastom brzine se ulazi u slabljenje polja i umanjuje d struja tj. fluks rotora. Pošto je fluks rotora sada manji, uvećava se struja q ose potrebna da se ostvari isti moment 3. Sa četvrtog grafika je jasno da za isti moment u slabljenju polja sa brzinom raste i klizanje 4. Ako pogon u režimu slabljenja polja zadrži isti moment, struja q ose raste proporcionalno padu struje d ose sa brzinom, dok je rast klizanja kvadratna flunkcija pada struje d ose sa brzinom. Pogon može da zadrži isti moment samo do prevalnog klizanja (limit koji nameće motor) ili maksimalne struje statora koja onemogućava dalji porast q struje (limit koji nameće invertor).
Slika 9.2.4. Rezultati simulacija rada vektorskog pogona sa AM upravljanog po momentu. a)
ostvarena brzina rotora, d) referentne d i q struje statora korišćene za račun klizanja c) ostvareni puls elektromagnetnog momenta, d) ugaona učestanost klizanja.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
5000
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
1
2
3
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.5
1
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
10
20
t [s]
ids [A]
iqs [A]
|Ψr| [Wb] mel [Nm]
nr [o/min]
ωk [rad/s]
a)
b)
c)
d)
3
4
2
1
10 9. Dodatni materijal za knjigu MUEP ____________________________________________________________________________________________________________________________________________________
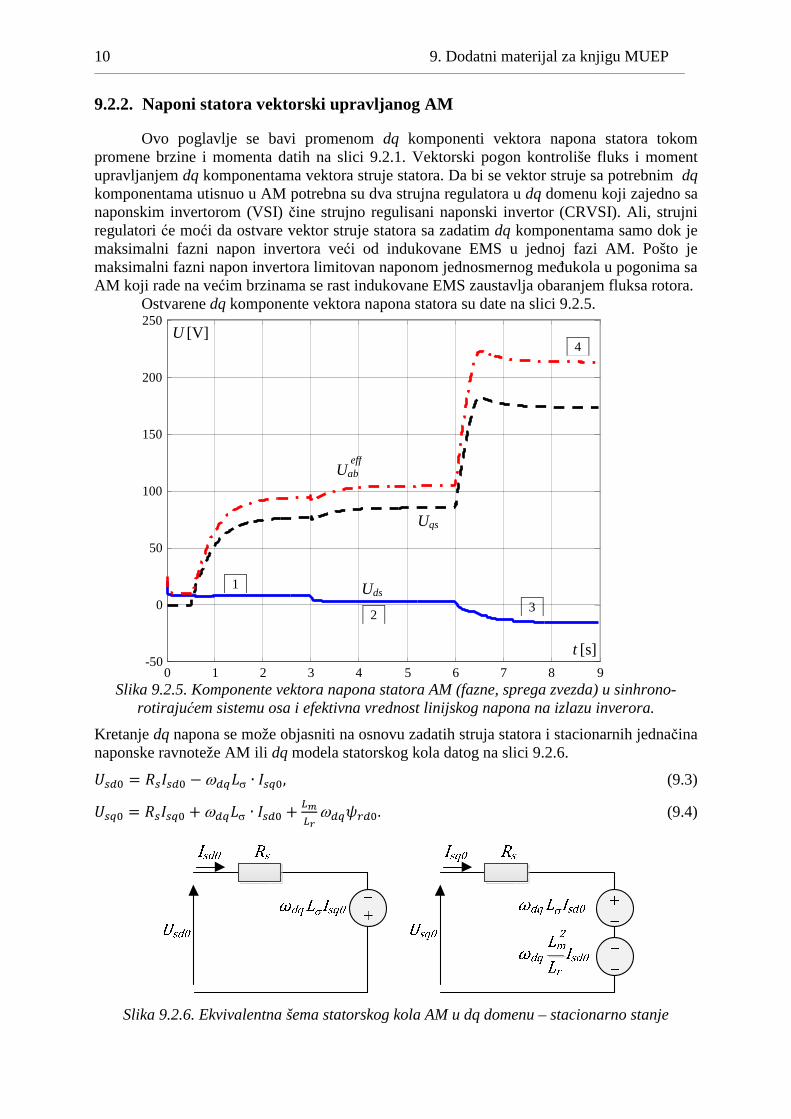
9.2.2. Naponi statora vektorski upravljanog AM
Ovo poglavlje se bavi promenom dq komponenti vektora napona statora tokom promene brzine i momenta datih na slici 9.2.1. Vektorski pogon kontroliše fluks i moment upravljanjem dq komponentama vektora struje statora. Da bi se vektor struje sa potrebnim dq komponentama utisnuo u AM potrebna su dva strujna regulatora u dq domenu koji zajedno sa naponskim invertorom (VSI) čine strujno regulisani naponski invertor (CRVSI). Ali, strujni regulatori će moći da ostvare vektor struje statora sa zadatim dq komponentama samo dok je maksimalni fazni napon invertora veći od indukovane EMS u jednoj fazi AM. Pošto je maksimalni fazni napon invertora limitovan naponom jednosmernog međukola u pogonima sa AM koji rade na većim brzinama se rast indukovane EMS zaustavlja obaranjem fluksa rotora. Ostvarene dq komponente vektora napona statora su date na slici 9.2.5.
Slika 9.2.5. Komponente vektora napona statora AM (fazne, sprega zvezda) u sinhrono-
rotirajućem sistemu osa i efektivna vrednost linijskog napona na izlazu inverora.
Kretanje dq napona se može objasniti na osnovu zadatih struja statora i stacionarnih jednačina naponske ravnoteže AM ili dq modela statorskog kola datog na slici 9.2.6.
1/ 2 ωσ ∙ /, (9.3)
1/ 5 ωσ ∙ / 5 ω. (9.4)
Slika 9.2.6. Ekvivalentna šema statorskog kola AM u dq domenu – stacionarno stanje
0 1 2 3 4 5 6 7 8 9-50
0
50
100
150
200
250
1
2 3
4 U [V]
Uds
Uqs
Uabeff
t [s]

9. Računarske simulacije mikroprocesorski regulisanih EMP 11 ____________________________________________________________________________________________________________________________________________________
Pad napona 1/ nastao proticanjem magnetizacione d struje statora čini da je d komponenta vektora napona statora neopterećenog pogona blago pozitivna 1. Kada se pogon optereti struja u q osi utiče na napon u d osi preko crosscoupling člana 2ωσ ∙ /. Ovaj član je zanemarljiv na malim brzinama ali sa povećanjem opterećenja obara d napon 2 dok sa porastom brzine prevladava 1/ i ukupan napon d ose postaje negativan 3. Najznačajniji deo napona q ose je indukovana EMS usled fluksa rotora koji je u d osi (logičan pomeraj od π/2 između fluksa i indukovanog napona). Ukoliko fluks rotora zadržimo
konstantnim, ovaj deo napona q ose raste sa brzinom ω usled porasta člana ω.
Ukoliko se zanemari pad napona na Rs, napon q ose raste linearno sa frekvencijom po zakonu
ω/ 6σ 5 7 8. Prelazak u režim slabljenja polja na brzini 4200 o/min, nakon kojeg se d
komponenta struje menja po 1/ωdq zakonu, dovodi do relativno konstante amplitude
indukovane EMS po fazi ω9/: 6σ 5 7 8 i takođe konstantne efektivne vrednosti linijskog
napona 4 koja ostaje manja od maksimalne koju invertor može da obezbedi. Trofazni invertor napajan monofazno teorijski može da obezbedi efektivnu vrednost linijskog napona jednaku efektivnoj vrednosti monofaznog ulaza, 230Veff. U tom slučaju je amplituda faznog napona motora u sprezi zvezda oko 185V. Kod ovog invertora napon jednosmernog međukola je Udc= 230V⋅1,41= 325V, tako da se uz uvažavanje varijacije Udc i padova napona na prekidačima dobija maksimalna moguća amplituda faznog napona 185V. Ipak, ulazak u slabljenje polja nakon neke frekvencije ili brzine je samo dobar školski primer. Ovo rešenje se ne koristi često u praksi usled raznih nedostataka. Jedan od osnovnih je činjenica da ulazni napon invertora može da varira i do ±10% što čini da u nekim situacijama invertor može dati manje napona neko što je predviđeno. U tom slučaju bi zadavanje nominalnog fluksa na nominalnoj brzini 4200 o/min izazivalo nastanak EMS koja je prevelika za trenutne naponske mogućnosti invertora. Bolje rešenje, koje je delimično diskutovano kod PMSM, poglavlje 7, jeste ugradnja regulatora naponske margine. Ovaj
regulator prati amplitudu zadatog faznog napona ;< 5 < na izlazu strujnih regulatora i
napon jednosmernog međukola. U slučaju da je zadata amplituda faznog napona veća od => ⋅? √3⁄ regulator naponske margine dodatno smanjuje struje d ose. Koeficijent => se bira u opsegu 0.92 − 0.95 u zavisnosti od tipa modulacije i podešavanja strujnih regulatora.
9.2.3. Struje statora ostvarene prilikom vektorskog upravljana AM
Na slici 9.2.6 je dat primer vremenskih dijagrama struja statora u faznom domenu, u stacionarnom i rotacionom sistemu osa. Prikazan je kraći vremenski interval u kome AM radi na brzini 2000 o/min u okolini trenutka kada dolazi do promene opterećenja sa 0Nm na 1Nm. Na gornjem grafiku su prikazane fazne struje isa, isb i isc dok su na grafiku u sredini date komponente strujnog vektora u stacionarnom αβ sistemu osa isα i isβ.. U abc i αβ
domenu se može uočiti približno 30% uvećanja amplitude struja sa uvećanjem opterećenja. Nominalna magnetizacija ovog AM zahteva struju isd = 2.5A, što uz isq = 0A rezultuje faznim strujama neopterećenog AM amplitude od √2.5 5 0 2.5A 1. Po nastanku opterećenja pojavljuje se aktivna komponenta struje isq ≈ 2A što čini da je ukupna amplituda struje √2.5 5 2 3.2A 2. Donji grafik prikazuje dq komponente strujnog vektora u rotacionom sistemu osa isd i isq. Pri promeni opterećenja isd ostaje konstantno, ali pošto dolazi do promene komande momenta, isq raste da bi se ostvario potreban moment. Regulacija brzine promenom q struje uz nominalni fluks je uobičajeno rešenje u vektorskim pogonima. Postoje i naprednija rešenja u kojima se i struja d ose menja u zavisnosti od opterećenja kako bi se ostvarila

12 9. Dodatni materijal za knjigu MUEP ____________________________________________________________________________________________________________________________________________________
optimalna raspodela između gubitaka u gvožđu i gubitaka u bakru. Optimalna raspodela d i q komponente struje dovodi do smanjenja ukupnih gubitaka pri istom momentu i brzini. Pri malim brzinama, uz zanemarljive gubitke u gvožđu, optimizacija gubitaka se svodi na optimizaciju gubitaka u bakru 3⋅1. 5 0, tj. na minimizaciju amplitude struje statora. Rezultat ove optimizacije, uz konstantan izlazni momenat, je isd = isq .
Slika 9.2.6. Promena struja AM usled promene opterećenja, a) fazne struje, b) αβ komponente strujnog vektora isα i isβ , c) dq komponente strujnog vektora isd i isq
9.2.4. Aktivna i reaktivna snaga ostvarene prilikom vektorskog upravljanja AM
Na slici 9.2.7 su date promene aktivne (P) i reaktivne snage (Q) AM.
Slika 9.2.7. a) Promena brzine i momenta koji razvija AM, b) Promena aktivne (P- puna linija) i reaktivne (Q- isprekidana linija) snage AM usled promene brzine i opterećenja.
0 1 2 3 4 5 6 7 8 90
2000
4000
6000
0 1 2 3 4 5 6 7 8 90
200
400
600
800
a)
b)
0
2
4
6
P [W]
Q [VAr]
1 2
3
5 6 7
4
nr [o/min] mel [Nm]
t [s]
3 3.05 3.1 3.15 -4
-2
0
2
4
3 3.05 3.1 3.15 -4
-2
0
2
4
2.95 3 3.05 3.1 3.15 0
1
2
3
isa,isb,isc [A]
isα,isβ [A]
isd [A]isq [A]
t [s]
a)
b)
c)
1
2

9. Računarske simulacije mikroprocesorski regulisanih EMP 13 ____________________________________________________________________________________________________________________________________________________
Izrazi za srednje vrednosti aktivne i reaktivne snage AM se mogu dobiti na osnovu jednačina naponske ravnoteže statora u stacionarnom stanju (9.3) – (9.4).
Aktivna snaga koja se predaje AM iznosi
3/2./ 5 /0 (9.5)
Neopterećen AM (/≈0) uzima relativno malu aktivnu snagu 1 koja je jednaka gubicima u bakru statora nastalih usled proticanja struje d ose potrebne za magnetizaciju.
3/2/ 3/21/ (9.6)
Po dolasku opterećenja, reakcijom regulatora brzine se javlja struja q ose i AM počinje da razvija moment. Snaga koju AM predaje vratilu raste
B Cω D3 2⁄ ⁄ E⋅ω 3 2⁄ ⁄ ω (9.7)
i izaziva porast aktivne snage koju uzima AM iz invertora 2, 3 2⁄ ./ 5 /0 = 3 2⁄ F.1/ 2 ωσ ∙ /0/ 5 1/ 5 6ωσ ∙ / 5
ω8 /G
=3 2⁄ 1./ 5 / 0 5 3 2⁄ ⁄ /ω =3 2⁄ 1./ 5 / 0 5 3 2⁄ ⁄ //ω 3 2⁄ 1./ 5 / 0 5Cω (9.8)
Sada je ukupna aktivna snaga zbir gubitaka u bakru i snage predate na vratilo. Prvi član su gubici u bakru koji zavise od ukupne struje statora, drugi član je predata aktivna (mehanička) snaga na vratilu a njihov zbir je ukupna aktivna snaga koju AM uzima od invertora. Naravno, sa porastom brzine raste i količina aktivne snage pri istom opterećenju 3.
Reaktivna snaga AM iznosi:
H 3/2./ 2 /0 (9.9)
H 3/2D.1/ 5 ωσ ∙ / 5 ⁄ ω0/ 2 .1/ 2 ωσ ∙ /0/E H 3/2 6ωσ ∙ ./ 5 / 08 5 3/2 ⁄ ω/ (9.10)
Reaktivna snaga je snaga koja osciluje između magnetnog polja AM i izvora. Prvi član u izrazu (9.10) je reaktivna snaga koja se rasipa na dinamičkoj induktivnosti statora Lσ, dok je drugi član reaktivna snaga koja odlazi na održavanje magnetnog polja AM. Za pojavu reaktivne snage je neophodno polje ali i učestanost polja različita od nule. Sa rastom te učestanosti, pri istom polju (struji magnećenja), raste i reaktivna snaga AM 4 . Za reaktivnu snagu nije neophodno opterećenje, tako da neopterećeni AM sa relativno velikim strujom d ose, tj. velikim fluksom rotora, može da ima značajnu reaktivnu snagu:
H 3/2/ 3/2ωσ 5 ⁄ ∙ / (9.11)
Sa rastom opterećenja raste i amplituda struje statora tako da raste i deo reaktivne snage koji se troši na dinamičkoj induktivnosti 5. Ipak, značajan porast reaktivne snage nastaje tek uvećanjem brzine pošto je reaktivna snaga proporcionalna učestanosti polja 6. Rast reaktivne snage se prekida nakon ulaska u slabljenje polja proporcionalnim obaranjem Isd0 7.
Na slici 9.2.8. je dodatno objašnjenja promena aktivne i reaktivne snage sa promenom opterećenja. Prikazane su trenutne vrednosti napona i struja AM (gornja slika) i aktivna i

14 9. Dodatni materijal za knjigu MUEP ____________________________________________________________________________________________________________________________________________________
reaktivne snaga (donja slika) u kratkom vremenskom intervalu u toku kojeg dolazi do promene opterećenja. Prikazane α komponente vektora napona i struje su date u relativnim jedinicama da bi bile uporedive amplitude. Prikazan je kraći vremenski interval, u kojem je AM radio na 2000 o/min, pa je došlo do promene opterećenja sa 0Nm na 1Nm.
Slika 9.2.8. a) Promena alpha komponenti struja i napona AM usled promene opterećenja, b) Promena trenutne vrednosti aktivne i reaktivne snage AM usled promene opterećenja,
U prikazanom primeru motor radi na brzini ispod nominalne tako da se vektorskim upravljanjem uz konstantnu struju d ose održava nominalni nivo fluksa rotora AM, bez obzira na nivo opterećenja. Dok je AM neopterećen struja q ose je jednaka nuli tako da je skoro ceo napon statora u q osi, jednačine (9.3)−(9.4). Sa druge strane, vektor struje je u d osi tako da je ugao između struje i napona skoro jednak π/2 1. Kada ne bi postojali gubici u praznom hodu neopterećenog AM, ovaj ugao bi bio tačno jednak π/2, i aktivna snaga bi tada bila jednaka nuli. U posmatranom slučaju, ulazna aktivna snaga je oko 25W 2 i troši se na pokrivanje gubitaka u bakru statora (u simulaciji su zanemareni gubici u gvožđu i gubici trenja i ventilacije). Dakle, neopterećeni AM iz mreže uzima veoma malu aktivnu snagu, dok njegova reaktivna snage zavisi od veličine polja i učestanosti i može biti veoma velika 3. Pojava opterećenja dovodi do pojave nenulte q komponente struje čime se smanjuje ugao između vektora napona i struje i pojavljuje aktivna snaga potrebna za ostvarenje momenta na vratilu 4. Reaktivna snaga blago poraste sa pojavom tereta usled pojave q struje što uveća ukupnu amplitudu struje statora i rasipanje reaktivne snage na dinamičkoj induktivnosti σ. Ovo se jasno vidi na slici 9.2.7. Na slici 9.2.8 je ipak snimljen samo blagi pad reaktivne snage nastao usled privremenog pada brzine nakon naglog opterećenja AM. Nakon što se brzina vrati na 2000 o/min ukupna reaktivna snaga se vraća na nivo malo iznad pojave opterećenja.
2.95 3 3.05 3.1 3.15
-0.2
0
0.2
2.95 3 3.05 3.1 3.150
100
200
300
t [s]P [W]
Q [VAr]
a)
b)
usα [r.j] isα [r.j]
1
2
3 4

9. Računarske simulacije mikroprocesorski regulisanih EMP 15 ____________________________________________________________________________________________________________________________________________________
9.3. Rezultati simulacija rada vektorski upravljanog sinhronog motora sa
permanentnim magnetima na površini rotora
U ovom poglavlju su dati rezultati simulacija rada vektorskog pogona sa sinhronim motorom koji ima permanentne magnete na površini rotora, Surface Permanent Magnet Synchronous Motor (SPMSM). Pogon se upravlja vektorski sa d osom koja je paralelna magnetima na rotoru. Pogonu je prvo zadata referentna brzina obrtanja rotora od 2000 o/min koja je u šestom sekundu simulacionog vremena promenjena na 6000 o/min. Pogon je prvo neopterećen, a zatim u trećem sekundu simulacionog vremena opterećen sa 1Nm. Parametri motora su Rs = 2.3Ω, Ls = Ld = Lq =19mH, Ψpm=0.13Wb P=2, sprega zvezda. Pošto je snaga SPMSM manja od 1kW trofazni invertor se napaja monofazno, sa naponom međukola ≈310V i ULL
MAX=220V⋅0.95 ≈ 210Vrms. Maksimalna linijska struja invertora je 8Arms.
Na slici 9.3.1 su prikazane ostvarena brzina i elektromagnetni moment koji razvija SPMSM. Sa slike 9.3.1 je jasno da vektorski pogon sa SPMSM na isti način, promenom momenta, reguliše brzine rotora kao i vektorski pogon sa AM, poglavlje 9.2.
Slika 9.3.1. Brzina rotora i moment koji razvija SPMSM
Na slici 9.3.2 su prikazane promene d i q komponenti vektora struje statora kojima je SPMSM pogon kontrolisao fluks statora i ostvareni moment i postigao odzive brzine prikazane na slici 9.3.1.
Osnovna razlika u odnosu na AM je da SPMSM poseduje stalni magnet na rotoru koji održava rotorski fluks na konstantnom nominalnom nivou bez obzira na vrednost struje statora u d osi. Dakle, kod SPMSM nam magnetizaciona d komponenta struje statora nije potrebna za uspostavljanje fluksa rotora.
0 1 2 3 4 5 6 7 8 90
1000
2000
3000
4000
5000
6000
0
1
2
3
4
5
6
nr
mel
nr [o/min] mel [Nm]
t [s]

16 9. Dodatni materijal za knjigu MUEP ____________________________________________________________________________________________________________________________________________________
Slika 9.3.2. Komponente vektora struje SPMSM (fazne) u sinhro-rotirajućem sistemu osa.
Promenom q komponente struje statora SPMSM se menja moment,
IJ. (9.12)
Pošto je fluks magneta konstantan IJ promena momenta sa strujom q ose je linearna.
Komponenta d vektora struje statora nema nikakav uticaj na moment kod SPMSM. Iz tog razloga se pri brzinama manjim od nominalne d struja zadržava na nuli da ne bi nepotrebno stvarala gubitke u bakru. Ali, na brzinama većim od nominalne negativna vrednost d komponente struje statora je neophodna da umanji fluks statora i time spreči dalji rast indukovanu EMS statora sa uvećanjem brzine rotora. Fluks rotora SPMSM se usled stalnih magneta ne može promeniti ali to ne važi i za fluks statora
/ 5 IJ (9.13)
Negativna struja d ose ima demagnetizaciono dejstvo u odnosu na fluks permanentnog magneta, i smanjuje ukupni fluks statora, samim tim umanjuje i indukovanu EMS statora. Upravljanjem strujom d ose SPMSM je moguće ostvariti dodatni regulator naponske margine, slika 7.8 (strana 215, knjiga MUEP). Regulator naponske margine reaguje po potrebi, tj. uvećanjem negativne d struje sprečava da amplituda indukovane EMS u fazi postane veća od maksimalne amplitude faznog napona koji CRVSI može da ostvari. Stacionarne vrednosti faznih d i q komponenti vektora napona statora se menjaju na osnovu zadatih struja statora i jednačina naponske ravnoteže SPMSM,
1/ 2K 1/ 2K/, (9.14)
1/ 5 K 1/ 5 K/ 5 IJ. (9.15)
Ekvivalentna šema statorskog kola SPMSM u dq domenu koja važi za stacionarno stanje je data na sledećoj slici.
0 1 2 3 4 5 6 7 8 9-1
0
1
2
3
4
5
6
t [s]
isd [A]
isq [A]

9. Računarske simulacije mikroprocesorski regulisanih EMP 17 ____________________________________________________________________________________________________________________________________________________
Slika 9.3.3. Ekvivalentna šema statorskog kola SPMSM u dq domenu – stacionarno stanje
Promene dq komponenti vektora napona statora tokom promene brzine i momenta datih na slici 9.3.1. su prikazane na slici 9.3.4
Slika 9.3.4. Komponente vektora napona statora SPMSM (fazne) u sinhrono-rotirajućem
sistemu osa i efektivna vrednost linijskog napona na izlazu invertora.
U d osi je komponenta vektora indukovane EMS statora jednaka nuli. Zato je i napon d ose neopterećenog pogona blizak ili jednak nuli 1. Kada se pogon optereti struja u q osi utiče na napon u d osi preko crosscoupling člana 2K/ 2. Daljim povećanjem brzine, uz isto opterećenje, napon d ose postaje sve negativniji 3.
U q osi se indukuje EMS statora KIJ nastala usled rotacije stalnog fluksa rotora u d osi. Ova komponenta raste linearno sa brzinom (K) tako da u slučaju neopterećenog pogona, ostala dva člana u 9.15su jednaka nuli, i napon q ose raste linearno sa brzinom. 4. Napon q ose dodatno raste sa opterećenjem usled pada napona na otpornosti statora 1/5. Ipak, pogotovo na većim brzinama, dominantan je rast napona q ose sa brzinom 6. Rast napona q ose se može sprečiti jedino primenom negativne d struje statora koja slabi fluks statora. Ovo je i primenjeno u prikazanom pogonu nakon što je indukovana EMS postala bliska maksimalnoj naponskoj margini, tačnije kada je postala 95% te margine. Nakon toga uključuje se regulator naponske margine koji upravlja strujom d ose tako da se amplituda
0 1 2 3 4 5 6 7 8 9-100
-50
0
50
100
150
200
250
usq [V]
usd [V]
uab [V]eff
1
2 3 9
4
5
6
7
8
t [s]

18 9. Dodatni materijal za knjigu MUEP ____________________________________________________________________________________________________________________________________________________
napona statora zadrži na vrednosti manjoj od maksimalne koji invertor može da ostvari. U datom primeru linijski napon se limituje na 0.95 ∙ 220∼209Vrms, 7. Ujedno, d komponenta napon statora je zadržana na oko ∼155V 8 i q komponentu na ∼65V 9, što čini da je amplituda faznog napona SPMSM limitirana na ∼170V. Na slici 9.3.5 je prikazana promena faznih struja statora u promene momenta opterećenja motora. Prikazan je kraći vremenski interval, u kojem je brzina SPMSM bila na vrednosti 2000 o/min i dolazi do promene opterećenja sa 0Nm na 1Nm.
Slika 9.3.5. Promena struja SPMSM usled promene opterećenja, a) fazne struje isa, isb i isc , b)
komponente strujnog vektora u stacionarnom sistemu osa isα i isβ , c) komponente strujnog vektora u rotacionom sistemu osa isd i isq .
Neopterećeni SPMSM u stacionarnom stanju ne razvija moment, pa je q komponenta struje statora jednaka nuli, a pošto se ne umanjuje fluks, tada je i d komponenta struje statora jednaka nuli. Kada se SPMSM optereti proporcionalno raste struja q ose. Ako je d struje i dalje jednaka nuli, jer mašina radi na brzini manjoj od nominalne, amplituda struje statora
raste proporcionalno sa q strujom || ; 5 .
Na slici 9.3.6 je prikazana promena aktivne i reaktivne snage SPMSM pri promeni brzine i opterećenja. Srednja vrednost aktivne i reaktivne snage SPMSM se mogu izračunati na osnovu jednačina naponske ravnoteže, (9.14) – (9.15).
Aktivna snaga koju SPMSM uzima iznosi,
3/2./ 5 /0 (9.16)
Ukupna aktivna snaga SPMSM je zbir gubitaka u bakru i snage predate na vratilo: 3 2⁄ ./ 5 /0 = 3 2⁄ N.1/ 2 K/0/ 5 61/ 5 K/ 5 IJ8 /O =3 2⁄ 1./ 5 / 0 5 3 2⁄ ⋅⋅IJ⋅/⋅ωB =3 2⁄ 1./ 5 / 0 5 CωB (9.17)
2.95 3 3.05 3.1 3.15 -4
-2 0
2
4
2.95 3 3.05 3.1 3.15 -4
-2
0
2
4
2.95 3 3.05 3.1 3.15 -2
0
2
t [s]
isa, isb, isc [A]
isα, isβ [A]
isd [A]
isq [A]
a)
b)
c)

9. Računarske simulacije mikroprocesorski regulisanih EMP 19 ____________________________________________________________________________________________________________________________________________________
Slika 9.3.6. a) Promena brzine i momenta koji razvija SPMSM, b) Promena aktivne (P- puna
linija) i reaktivne (Q- isprekidana linija) snage AM usled promene brzine i opterećenja. Prvi član su gubici u bakru, drugi član je aktivna snaga koja postaje mehanička predata na vratilo a njihov zbir je aktivna snaga koju invertor predaje SPMSM. Neopterećeni SPMSM, uz zanemarene gubitke u gvožđu, ima aktivnu snagu jednaku nuli 1. Razlog za to je nulta struja statora (stator ne održava polje nego magneti na rotoru) i nulta vrednost razvijenog momenta. Pri pojavi opterećenja raste mehanička snaga koja vrši rad pa samim tim i aktivna snaga 2. Uz isti moment opterećenja aktivna snaga raste i sa brzinom pošto sa porastom učestanosti raste mehanička snaga koja se predaje na vratilu 3.
Reaktivna snaga SPMSM iznosi, H 3/2./ 2 /0 H 3/2 P61/ 5 K/ 5 IJ8 / 2 .1/ 2 K/0/Q H 3/2ωR./ 5 / 0 5 IJ/ (9.18)
Prvi član je deo reaktivne snage koji se rasipa na induktivnostima statora SPMSM. Drugi član je reaktivna snaga kojom se može regulisati (umanjiti) fluksa statora. Ova snaga je potrebna u režimu slabljenja polja kada indukovani napon na statoru postane preveliki. Pri relativno malim brzinama napona ima dovoljno, nema potrebe za umanjenjem fluksa statora i struja d ose se zadržava na nuli. Samim tim je drugi član (9.18) jednak nuli, tj. stator ne doprinosi svojom reaktivnom energijom uvećanju ili umanjenju (češći slučaj u praksi) polja rotora. Dok je pogon neopterećen nema ni q struje statora tako da je Q = 0 4. Kada se pogon sa SPMSM optereti pored aktivne uveća se i reaktivna snaga 5. Razlog za to je rasipanje reaktivne snage 3/2.ωR ∙ / 0 koje zavisi samo od amplitude struje statora, koja raste sa opterećenjem. Ukoliko se d struja zadrži na nuli reaktivne snaga SPMSM proporcionalno raste sa porastom učestanosti 6. Nakon što napon statora postane preveliki ulazi se u režim slabljenja polja u kome se fluks statora obara uvođenjem negativne struje d ose / 5 IJ. U ovom režimu uvećanje negativne d struje delimično uvećava rasipanje reaktivne snage na
0 1 2 3 4 5 6 7 8 90
2000
4000
6000
0 1 2 3 4 5 6 7 8 90
200
400
600
800
nr [o/min]
nr
mel [Nm]
mel
P[W]
Q[VAr] 1 4
2
5
6 7
3
t [s]

20 9. Dodatni materijal za knjigu MUEP ____________________________________________________________________________________________________________________________________________________
induktivnosti statora, član 3/2 6ωR ∙ ./ 5 / 08, ali značajno više obara ukupnu
reaktivnu snagu i fluks statora, član IJ/<0. Ovo je logično pošto se negativna d struja koristi da umanji magnetno polje, a ne da ga napravi ili uveća. Stvar je uslova rada i parametera PMSM kakav će biti ukupan znak reaktivna snage. U datom primeru ukupna reaktivna snaga ostaje pozitivna tj. ne vraća se nazad izvoru ali je njen porast ograničen uvođenjem negativne / 7. Na slici 9.3.7. je dodatno objašnjenja promena aktivne i reaktivne snage SPMSM sa promenom opterećenja. Prikazane su trenutne vrednosti napona i struja SPMSM (gornja slika) i aktivna i reaktivne snaga (donja slika) u kratkom vremenskom intervalu u toku kojeg dolazi do promene opterećenja. Prikazane α komponente vektora napona i struje su date u relativnim jedinicama da bi bile uporedive amplitude. Prikazan je kraći vremenski interval, u kojem je SPMSM radio na 2000 o/min, pa je došlo do promene opterećenja sa 0Nm na 1Nm.
Slika 9.3.7. a) Promena alpha komponenti struja i napona SPMSM sa promenom opterećenja, b) Promena trenutne vrednosti aktivne i reakivne snage SPMSM usled promene opterećenja
U prikazanom baznom režimu brzina, / 0, kod SPMSM struja statora se pojavljuje tek sa opterećenjem 1 tako da su za neopterećen pogon i P i Q jednake nuli 2. Pri relativno malim brzinama (učestanostima) ta struja je praktično u fazi sa naponom jer je član 2K/ u d komponenti napona zanemarljivo mali. To znači da na malim brzinama SPMSM praktično uzima samo aktivnu snagu. Ali, na relativno velikim brzinama član 2K/ postaje značajan, tako da sa porastom tereta dolazi do porasta i aktivne i reaktivne snage, što se vidi i na slici 9.3.7, 3. Pojava pozitivne reaktivne snage sa opterećenjem na većim brzinama se može objasniti i pomeranjem vektora napona iz q ose, pošto napon d ose postaje negativan. Time se vektor napona pomera ulevo i prednjači u odnosu na vektor struje 4 koji ostaje samo u q osi. Dakle, pri većim brzinama rastom tereta, raste q struja statora čime se kontroliše momenat i aktivna snaga ali raste i rasipanje reaktivne snage na reaktansi statora.
2.95 3 3.05 3.1 3.15-0.4
-0.2
0
0.2
0.4
2.95 3 3.05 3.1 3.150
100
200
300
t [s]
Q [VAr]
P [W]
usα [r.j.]
isα [r.j.]
a)
b)
2
3
1
4

9. Računarske simulacije mikroprocesorski regulisanih EMP 21 ____________________________________________________________________________________________________________________________________________________
9.4. Rezultati simulacija rada vektorski upravljanog sinhronog motora sa
permanentnim magnetima utisnutim u rotor
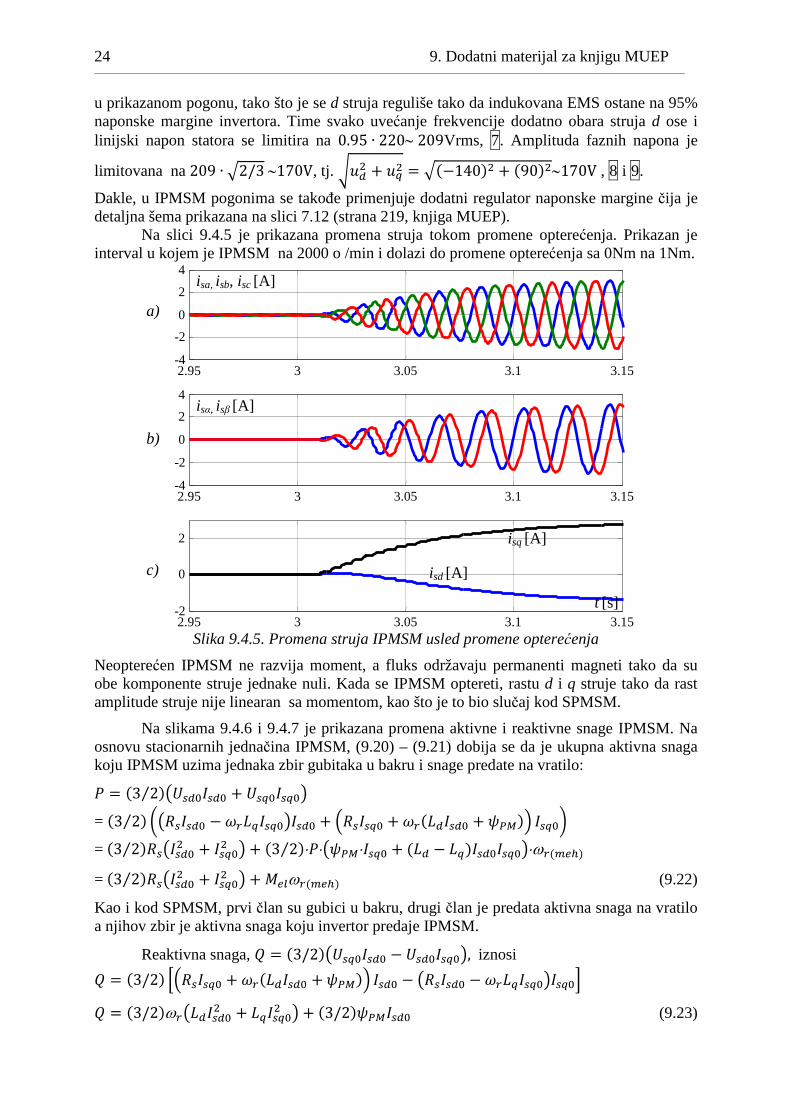
U ovom poglavlju su dati rezultati simulacija rada vektorskog pogona sa sinhronim motorom koji ima permanentne magnete utisnute u rotor, Interior Permanent Magnet. Synchronous Motor (IPMSM). Pogonom se upravlja vektorski sa d osom koja je paralelna magnetima na rotoru. Pogonu je prvo zadata referentna brzina obrtanja rotora od 2000 o/min koja je u šestom sekundu simulacionog vremena promenjena na 6000 o/min. Pogon je prvo neopterećen, a zatim je u trećem sekundu simulacionog vremena opterećen sa momentom od 1Nm. Parametri motora su Rs = 2.3Ω , Ld = 19mH, Lq =44mH, Ψpm=0.1Wb P=2, sprega zvezda. Pošto je snaga IPMSM manja od 1kW trofazni invertor se napaja monofazno, sa Udc ≈ 310V i UL-L
MAX=220V⋅0.95 ≈ 210Vrms. Maksimalna linijska struja invertora je 8Arms. Testiran IPMSM ima nešto manji fluks rotora (magneta) od SPMSM iz poglavlja 9.3 ali ima veću Lq tako da pri ubrzanju sa optećenjem ulazi u slabljenje polja na sličnoj brzini, na oko 4000 o/min efektivna vrednost indukovane linijska EMS je oko 200V. Na slici 9.4.1 su prikazane ostvarena brzina i elektromagnetni moment koji razvija IPMSM. Sa slike 1 je jasno da vektorski pogon sa IPMSM na isti način kao i AM ili SPMSM, promenom momenta, reguliše brzinu rotora, poglavlje 9.1. i 9.2.
Slika 9.4.1. Brzina rotora i moment koji razvija IPMSM
Na slici 9.4.2 su prikazane promene faznih d i q komponenti vektora struje statora kojima je IPMSM pogon kontrolisao fluks statora i ostvareni moment i postigao odziv brzine prikazan na slici 9.4.1. Osnovna razlika između IPMSM i SPMSM je u načinu razvijanja momenta i kontrole brzine. Moment konverzije kod IPMSM pored magnetne ima i reluktantnu komponentu:
.IJ 5 . 2 00. (9.19)
0 1 2 3 4 5 6 7 8 90
1000
2000
3000
4000
5000
6000
0
1
2
3
4
5
6nr [o/min] mel [Nm]
nr
mel
t [s]

22 9. Dodatni materijal za knjigu MUEP ____________________________________________________________________________________________________________________________________________________
Slika 9.4.2. Komponente vektora struje statora IPMSM (fazne) u sinhro-rotirajućem sistemu osa. Pored d i q komponente struje statora prikazano je i dodatnu umanjenje d struje statora
(∆isd) radi održavanja naponske margine
Na osnovu (9.19) je jasno da upravljanje momentom IPMSM promenom samo q komponente struje statora, uz d komponentu struje jednaku nuli, nije optimalno jer se ne koristi reluktantna komponenta momenta. Očigledno je da se potrebna vrednost momenta IPMSM može ostvariti sa više kombinacija parova d i q struje. U tom slučaju je optimalno naći onaj par d i q struje koji čine da je isti zadati momenat ostvaren sa minimalnom amplitudom struje statora. Ili, moguće je zadati amplitudu struje statora a izračunati onaj par d i q struja koji za tu amplitudu struje statora daje maksimalni moment. Ovo drugo rešenje se koristi u praksi i optimalne vrednosti d i q komponenti vektora struje se dobijaju na izlazu MTPA bloka. MTPA blok obezbeđuje maksimalni moment za zadatu amplitudu struje statora koju reguliše regulator brzine, detaljnije u poglavlju 7.3.2. Ovim se pored zadatog momenta obezbeđuju i minimalni gubici u bakru pošto se delovanjem povratne sprege po brzini za isti moment dobija minimalna amplituda struje statora. Struje na slici 9.4.2. su upravo dobijene na izlazu MTPA bloka. Znak struje q ose je pozitivan jer zavisi od znaka momenta, dok je znak struje d ose uvek negativan jer usled Lq>Ld samo tada reluktantna komponenta doprinosi ukupnom momentu. Dakle, kod IPMSM se sa pojavom opterećenja zajedno pojavljuju pozitivna struja q ose (magnetni moment) i negativna struja d ose (reluktanti moment) 1. Jedino odstupanje od MTPA se dešava kada pogon dostigne naponsku marginu, 2. Tada je neophodno utisnuti veću količinu negativne d struje koja će dodatno umanjiti fluks statora i održati naponsku margina između indukovane EMS i maksimalnog napona statora koji invertor može da obezbedi. Slično kao kod SPMSM i kod IPMSM se negativnom Isd smanjuje ukupni fluks statora (/ 5 IJ). Kontrolom d struje je moguće održavati indukovanu EMS na konstantnoj vrednosti koja je niža od napona koji može da obezbedi invertor. Dodatni rezultat uvećanja negativne d struje je uvećanje reaktivnog momenta tako da se potrebna q struja kojom se razvija isti moment malo smanjuje 3. Ostvarene komponente vektora napona statora su date na slici 9.4.3.
0 1 2 3 4 5 6 7 8 9-3
-2
-1
0
1
2
3
4
5
1
2
3
isd [A]
isq [A]
∆isd [A]
t [s]

9. Računarske simulacije mikroprocesorski regulisanih EMP 23 ____________________________________________________________________________________________________________________________________________________
Slika 9.4.3. Komponente vektora napona statora IPMSM (fazne) u sinhrono-rotirajućem
sistemu osa i efektivna vrednost linijskog napona IPMSM.
Stacionarne vrednosti faznih d i q komponenti vektora napona statora se menjaju na osnovu zadatih struja statora i jednačina naponske ravnoteže IPMSM,
< 1/ 2 K 1 2 K , (9.20)
< 1/ 5K 1 5 K 5KIJ. (9.21)
Sledi ekvivalentna šema statorskog kola IPMSM u dq domenu za stacionarno stanje.
Slika 9.4.4. Ekvivalentna šema statorskog kola IPMSM u dq domenu – stacionarno stanje
Napon d ose neopterećenog pogona pri malim brzinama je jednak nuli 1 jer su struje / / 0 . Ukoliko se pogon optereti, napon d ose raste u negativnu stranu usled člana 2K/ 2. Daljim porastom brzine uz isto opterećenje negativan d napon i dalje raste 3.
Napon q ose, uz konstantan fluks statora, linearno raste sa brzinom 4. On se zbog dejstva MTPA algoritma IPMSM malo smanjuje sa opterećenjem usled pojave negativne struje d ose .1/<K/0 koja stvara pozitivan reluktantni moment, ali ujedno i umanjuje fluks statora 5. Ipak, pogotovo na većim brzinama je dominantan rast napona q ose sa brzinom 6 usled KIJ. Ovaj rast napona statora se na isti način sprečava kao i kod AM i SPMSM, ubacivanjem negativne d struje statora koja slabi fluks statora. Ovo je i primenjeno
0 1 2 3 4 5 6 7 8 9-200
-150
-100
-50
0
50
100
150
200
250
t [s]
uab [V]
usq [V]
usd [V]
eff
1
4
5
2
6
3
7
8
9
24 9. Dodatni materijal za knjigu MUEP ____________________________________________________________________________________________________________________________________________________
u prikazanom pogonu, tako što je se d struja reguliše tako da indukovana EMS ostane na 95% naponske margine invertora. Time svako uvećanje frekvencije dodatno obara struja d ose i linijski napon statora se limitira na 0.95 ∙ 220∼209Vrms, 7. Amplituda faznih napona je
limitovana na 209 ∙ S2/3∼170V, tj. ;< 5 < S2140 5 90∼170V , 8 i 9.
Dakle, u IPMSM pogonima se takođe primenjuje dodatni regulator naponske margine čija je detaljna šema prikazana na slici 7.12 (strana 219, knjiga MUEP). Na slici 9.4.5 je prikazana promena struja tokom promene opterećenja. Prikazan je interval u kojem je IPMSM na 2000 o /min i dolazi do promene opterećenja sa 0Nm na 1Nm.
Slika 9.4.5. Promena struja IPMSM usled promene opterećenja
Neopterećen IPMSM ne razvija moment, a fluks održavaju permanenti magneti tako da su obe komponente struje jednake nuli. Kada se IPMSM optereti, rastu d i q struje tako da rast amplitude struje nije linearan sa momentom, kao što je to bio slučaj kod SPMSM.
Na slikama 9.4.6 i 9.4.7 je prikazana promena aktivne i reaktivne snage IPMSM. Na osnovu stacionarnih jednačina IPMSM, (9.20) – (9.21) dobija se da je ukupna aktivna snaga koju IPMSM uzima jednaka zbir gubitaka u bakru i snage predate na vratilo:
3 2⁄ ./ 5 /0 = 3 2⁄ N.1/ 2 K/0/ 5 61/ 5 K/ 5 IJ8 /O =3 2⁄ 1./ 5 / 0 5 3 2⁄ ⋅⋅.IJ⋅/ 5 2 //0⋅ωB =3 2⁄ 1./ 5 / 0 5 CωB (9.22)
Kao i kod SPMSM, prvi član su gubici u bakru, drugi član je predata aktivna snaga na vratilo a njihov zbir je aktivna snaga koju invertor predaje IPMSM.
Reaktivna snaga, H 3/2./ 2 /0, iznosi
H 3/2 P61/ 5 K/ 5IJ8 / 2 .1/ 2 K/0/Q H 3/2ω./ 5 / 0 5 3/2IJ/ (9.23)
2.95 3 3.05 3.1 3.15-4
-2 0
2
4
2.95 3 3.05 3.1 3.15-4
-2
0
2
4
2.95 3 3.05 3.1 3.15-2
0
2
t [s]
isa, isb, isc [A]
isα, isβ [A]
isq [A]
isd [A]
a)
b)
c)

9. Računarske simulacije mikroprocesorski regulisanih EMP 25 ____________________________________________________________________________________________________________________________________________________
Prvi član je rasipanje dok je drugi reaktivna snaga koja odlazi na promenu polja statora.
Slika 9.4.6. a) Promena brzine i momenta koji razvija IPMSM, b) Promena aktivne (P- puna
linija) i reaktivne (Q- isprekidana linija) snage AM usled promene brzine i opterećenja.
Slika 9.4.7. a) Promena alpha komponenti struja i napona IPMSM sa promenom opterećenja, b) Promena trenutne vrednosti aktivne i reaktivne snage IPMSM usled promene opterećenja,
Promena aktivne i reaktivne energije sa brzinom i opterećenjem kod IPMSM je slična kao i kod SPMSM. Jedina razlike je da pojava negativne d struje kod IPMSM nastaje i usled potrebe za reluktantnim momentom, a ne samo usled potrebe za umanjenjem fluksa statora u režimu slabljenju polja. Ali, i dalje je ukupna reaktivna snaga pri negativnoj d struji zbir pozitivnog rasipanja HU 3/2ω ∙ ./ 5 / 0 koje raste sa brzinom i negativnog člana HV 3/2IJ/ koji kontrola fluksa statora koristi da obori fluks i napon statora pa i ukupnu reaktivnu snagu.
2.95 3 3.05 3.1 3.15 -0.4
-0.2
0
0.2
0.4
2.95 3 3.05 3.1 3.15 0
100
200
300
a)
b)
t [s]
Q [VAr]
P [W]
usα [r.j.]
isα [r.j.]
0 1 2 3 4 5 6 7 8 90
2000
4000
6000
0 1 2 3 4 5 6 7 8 90
200
400
600
800P [W]
Q [VAr]
0
2
4
6nr [o/min] mel [Nm]
t [s]
nr
mel