52084336-thesis-fina123
TRANSCRIPT

CHAPTER-IINTRODUCTION
1.1 GENERAL
In a remote area there used to be two general solutions for its electrification making a
connection to the closest grid or using diesel generation to get self-sufficiency. Both
methods are incredibly expensive and that is the origin for the hybrid systems, which
means the combination between that dispatch able diesel source and a renewable one.
Wind-diesel Hybrid Power Systems are designed to provide electrical generating
capacity to remote communities and facilities that are not linked to a power grid. The
introduction of wind-diesel hybrid systems reduces reliance on diesel fuel, which
creates pollution and is costly to transport.
Wind energy has received considerable public attention since the last decade, and
has been the fastest growing energy source. The global installed wind capacity is
expected to grow much more rapidly in the next decade as many policies around the
world have implemented or are in the process of implementing policies such as
Renewable Portfolio Standard (RPS) [5]. Acceptance of the RPS is a commitment to
produce a specified percentage of the total power generation from renewable sources
within a certain date. Most of this renewable energy will come from wind as other
renewable sources are not very suitable for bulk power generation. Wind energy is non-
depleting, site-dependent, non-polluting, and a potential source of the alternative energy
option.
The first wind turbine for electricity generation has already been developed at the
ending of the 19th century. During the winter of 1887-88, Brush built is today believed
to be the first automatically operating wind turbine for electricity generation. It has
been a giant in size but with a capacity of 12 kW. At the beginning of the 20th century,
the research institute began to pay attention of wind power technology, and the first
wind power journal has been published by Poul la Cour (1846-1908) [1]. During the
period of 1940-1950, two significant technical improvements have been made: first, the
3 blades structure of wind turbine; second, AC generator replaced DC generator. In the
1970s, the oil crisis rekindled the interests of wind power. The capacity of wind power
1

units has increased to several hundred kW. From 1980, a wind turbine of MW has
begun to be implemented in power system. Moreover, another direction of wind
technology is to reduce the cost, which is one major difficulty, which wind power
researchers has faced. By the end of the 1990s, the wind power has re-emerged as one
of the most important sustainable energy resources. The wind power is expected to play
a comparatively significant role in the future national energy scene [1].
At the beginning of 2004, the total installed capacity of wind energy systems all over
the world reached 39 GW with an annual growth rate of about 30% [2]. It is predicted
that 12% of the total world electricity demands is expected to be supply from wind
energy by 2020 [3]. As for Canada, the total wind energy production now is 1451 MW
with an annual average growth rate of about 35% [4]. The main goal to be achieved, as
reported by the Canadian Wind Energy Association (Can-WEA), is to generate more
than 10GW electricity from wind energy by 2010 (10 X 10 Canada Wind Vision
Program) [4].
Diesel generators also known as Generation sets, provide reliable power when
properly maintained. The initial cost of a complete diesel power system is also
relatively low. They can be easily transported and are having low-technical problems
which aids in their reliability and ensures ease of operation. Consumption of fuel takes
place even at zero loads [5]. In some areas of the world where wind power is not
abundant other forms of renewable energy such as solar and hydro power can be used
and in some cases the diesel generator has been done away with all together. Hybrid
systems range in size from a few Kw to several Mw of power. The variable nature of
most renewable energy sources means that hybrid systems often have to have extensive
control systems so that demand can met and power quality assured. Hybrid systems can
guarantee the certainty of meeting load demands at all times at reasonable cost, for
certain latitudes and escapes of the total dependency of the resources of the
hydrocarbons and the economic viability of some other energetic alternatives.
2

1.2 HYBRID SYSTEMS
The rapid depletion of fossil fuel resources on a worldwide basis has necessitated
an urgent search for alternative energy sources to cater to the present day demands.
Alternative energy resources such as solar, wind, ocean thermal and tidal have attracted
energy sectors to generate power on a large scale. However, solar and wind energy
systems are being considered as promising power generating sources due to availability
and the topological advantages in local power generation. It is prudent that neither
standalone wind energy system nor solar system can provide a continuous supply of
energy due to seasonal that combine solar and wind generating units with battery
backups are implemented to satisfy the load demand. A great deal of research and has
been carried out on hybrid energy systems with respect to performance, optimization,
integration with diesel /biomass systems and other related parameters of significance.
Power systems using multiple generation sources can be more accurately described
by the term ‘hybrid power systems’ [6]. Hybrid power systems range from small
systems designed for one or several homes to very large ones for remote island grids or
large communities. Alternative energy resources such as solar, wind, ocean thermal and
tidal have attracted energy sectors to generate power on a large scale. However, solar
and wind energy systems are being considered as promising power generating sources
due to availability and the topological advantages in local power generation. It is
prudent that neither standalone wind energy system nor solar system can provide a
continuous supply of energy due to seasonal that combine solar and wind generating
units with battery backups are implemented to satisfy the load demand [7].
Power systems utilizing renewable energy such as wind, solar and micro-hydro
require control methods to maintain stability due to the real time variation of input
energy and load, while maximizing the use of renewable resources. In such cases, the
WDPS(Wind Diesel Power System) serves an entire isolated load and is responsible for
maintaining frequency and voltage stability (dynamic performance). The main focus in
WDPS design is to secure both fuel saving of diesel generator unit and reliable power
supply to load. Using, diesel generator installed capacity is sized to meet the peak
3

power demand, but is used in practice to supply power only when the wind power
output is insufficient to meet the load demand.
1.2.1 ADVANTAGES OF THE HYBRID SYSTEMS
Optimum utilization of renewable energy sources in a remote area
The certainty of meeting load demands at all times is greatly enhanced by the
hybrid systems
In some hybrids, batteries are used in addition to the diesel generator, the batteries
meet the daily load fluctuation, and the diesel generator takes care of the long term
fluctuations.
Designed for easy to operate, service and maintenance when required.
Most eco friendly and clean source of power.
The hybrid systems provide more consistent year round renewable energy
production. These systems are modular and can be expand easily.
Lying of the expensive grid line, transmission and distribution losses can be
eliminated.
Eliminates any associated expensive electricity bills.
1.2.2 TYPES OF THE HYBRID SYSTEMS
Solar and wind Hybrid system
Wind and Diesel Hybrid system
Solar and Diesel Hybrid system
Wind and Diesel and Fuel cell Hybrid system
Wind and micro-Hyde Hybrid system
Wind diesel and solar Hybrid system
1.2.3 DESIGN CONSIDERATIONS OF HYBRID ENERG SYSTEMS
The design of hybrid energy systems involves the following steps
4

Selection of the energy resources to be used (this will depend on the of
potential
of different renewable energy resources in the area).
Choice of the system configuration
Load profile determination of the area to be served
(seasonal/monthly/yearly)
Sizing of the system components and switchgear, distribution networks etc.
Economic analysis of the project (payback, NPV etc)
Environmental/socio-economic evaluation for sustainability
Provision for expansion, land costs and environmental clearances
Testing of the system design through simulation exercises.
Modification of the system configuration on the basis of simulation
feedback
Once the main considerations have been finalized, the system is ready for the
implementation stage. The subsequent performance of the system will then be governed
by appropriate system management strategies, which can promote local employment,
conservation and high efficiency.
1.3 LITERATURE REVIEW
Many in recent past have carried out research in Hybrid systems. H.S.Ko, T.NJImur,
K.Y.Lee [8] described an intelligent controller based on a neural network for a wind-
diesel power system .The goal is to design an intelligent controller to maintain a good
power quality under varying wind and load conditions. R.Sebastian, J Quesada [7] has
proposed distributed control system (DCS) by analyzing the control requirements for
frequency control in different modes of operation and described the actuation of its
sensor and actuator nodes for isolated wind systems. J.K.Kaladellis [6] has focused on
presenting a detailed mathematical model describing the operational behavior of the
basic hybrid system components, along with the representative calculation results based
on the developed mathematical model. Accordingly, an integrated numerical algorithm
is build to estimate the energy autonomy configuration of the hybrid system.
5

R.Sebastian [9] has proposed a control technique for smooth transition from wind to
wind diesel mode and vice versa for high penetration autonomous wind diesel hybrid
system with battery storage. Das D, Aditya, SK, Kothari D.P [10] has focused on
dynamics of diesel and wind turbine generators on an isolated power system.
S.H.Karki, R.B.Chedid and R.Ramdan [11] Explained about production cost evaluation
for wind diesel system using probalistic techniques.Yeager KE, Willis JR [12] has
proposed a Modeling of diesel generators in a nuclear power plant and explained about
designing actuator and speed governor system for diesel generator set. S. Roy, 0. P.
Malik and G. S. Hope [13] has proposed an adaptive control technique for fuel flow
into diesel engine. P.A.Stott, M.A.Mueller.[14] has given a new topology for a fully
variable speed hybrid wind/diesel power system modeled in Matlab/ Slimulink. Use of
the variable speed diesel generators is shown to increase the fuel savings over a
constant speed generator in a hybrid system. The load matching capabilities of the
variable speed diesel generator to wind speed drops in the hybrid system are then
assessed. Finally integration of a variable speed wind turbine and new variable speed
diesel generator through the DC-link stage of an AC/DC/AC power converter has been
simulated to establish compatibility
Farid Katiraei, Chad Abbey [15] introduced an energy-flow model developed for
performance analysis and unit sizing of an autonomous wind-diesel Microgrid. The
model is employed to analyze the interaction of wind and diesel power plants in order
to identify alternative unit sizing approaches that improve wind-energy absorption rate
of the wind plant, and overall efficiency of the diesel plant. Ruben pena, Roberto
Cardenas [16] introduced a indirect vector scheme control structure for a variable
speed wind diesel energy system based on doubly fed induction generators to provide
an energy to an isolated load. This scheme uses a common DC bus enable super and
sub synchronous operations of both machines .Fadia M. A. Ghali, Shawki H. Arafah
introduced a hybrid systems combining wind energy conversion systems and diesel
generators are considered one of the alternatives to feed demands at lower energy cost and
acceptance reliability
6

1.4 OUTLINE OF CHAPTERS
The work presented in this thesis is divided into six chapters which include the
literature review, system description, Voltage and frequency control with fixed speed
wind turbine and variable speed wind turbine for a wind diesel system ,smooth
transition from wind to wind diesel mode and its control circuit, Fault analysis on wind
diesel system and future work. The proposed work is organized in following chapters
Chapter I:
This chapter deals with the introduction to the hybrid power systems based on Wind diesel
system, types and advantages of hybrid system .This chapter also presents literature review
and various control schemes for voltage and frequency are reported in the literature on
wind diesel hybrid power systems.
Chapter II:
This chapter describes about the dynamic model equations of the wind turbine, different
types of wind turbine systems, modeling of diesel engine and its speed control
Chapter III:
This chapter deals with dynamic performance of wind diesel system (with fixed wind
speed turbine) in different modes of operation such as wind only mode, diesel only
mode and wind diesel mode. Performance of wind diesel system with a transmission
line between them and. fault analysis to ensure the system stability are also discussed.
Chapter IV:
This chapter deals with the operation of smooth transition model from wind to wind
diesel mode and the proposed control circuit
Chapter V:
This chapter deals with dynamic performance of wind diesel system (with Variable
wind speed turbine) in wind diesel mode. Performance of wind diesel system with a
transmission line between them and fault analysis to ensure the system stability are also
discussed is also discussed.
Chapter VI:
This chapter deals with the conclusions drawn on the basis of work carried out. More
over the scope of further work is also enlisted in brief.
7

CHAPTER-II
WIND AND DIESEL ENERGY SYSTEM
2.1 GENERAL
Wind-diesel generating systems have been under development and trialed in a
number of locations during the latter part of the 20th century. A growing number of
viable sites have now been developed with increased reliability of the systems. This is
key to their success, as minimizing the cost of technical support in remote communities
is vital for the ongoing development and implementation of this technology.
2.2 WIND TURBINE
Wind turbine is a machine that converts the kinetic energy in wind into mechanical
energy. If the mechanical energy is used directly by machinery such as pumping or
grinding stones, the machine is called a windmill [18].Wind mills have been used for at
least 3000 years, mainly for grinding grain or pumping water, while in sailing ships the
wind has been an essential source of power for even longer. A wind turbine (WT)
consists of turbine blades, rotor, generator, nacelle (gearbox and generator drive), shaft,
drive or coupling device, converter and control system.
Wind turbines can be classified to 2 types .Fixed speed wind turbine and variable
speed wind turbine. Fixed speed can only operate at a fixed speed, and use induction
machine as generators. While operational speed of variable speed wind turbine can
variant with a constant frequency. Variable speed wind turbines use doubly fed
induction machine (DFIG) or permanent magnet synchronous machine (PMSM) as the
generator. Wind turbine model can be mainly divided into 3 parts: mechanical drive
and control, generator, converter and control system, among which the model of the
generator is most important
8

2.2.1 WIND TURBINE MODEL IN SIMULINK
The Simulink model of the wind turbine is illustrated in the following figure2.1. The
three inputs are the generator speed (ωr_pu) in pu of the nominal speed of the
generator, the pitch angle in degrees and the wind speed in m/s. The tip speed ratio λ in
pu of λ_nom is obtained by the division of the rational speed in pu of the base rotational
speed and the wind speed in pu of the base wind speed. The output is the torque applied
to the generator shaft.
Tm (pu )
1
wind _speed ^3
u(1)^3
pu ->pu
-K-
pu ->pu
-K-
lambda _nom
-K-
cp(lambda ,beta )
lambda
betacp
Product
Product
-1
Avoid divisionby zero
Avoid divisionby zero
1/wind _base
-K-
1/cp_nom
-K-
Wind speed(m/s)
3
Pitch angle (deg )
2
Generator speed (pu )
1
Pwind_puPm_pu
lambda
cp_pu
lambda_pu
wind_speed_pu
Fig.2.1 Simulink Model of Wind turbine
The mechanical power Pm as a function of generator speed, for different wind speeds
and for blade pitch angle β = 0 degree, is illustrated below. This figure is obtained with
the default parameters (base wind speed = 12 m/s, maximum power at base wind speed
= 0.73 pu (kp = 0.73) and base rotational speed = 1.2 pu). The turbine power
characteristics for different values of turbine speed at a pitch angle 0o are illustrated in
Fig 2.2.
9

0 0.2 0.4 0.6 0.8 1 1.2 1.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1 pu
Max. power at base wind speed (12 m/s) and beta = 0 deg
6 m/s7.2 m/s
8.4 m/s
9.6 m/s
10.8 m/s
12 m/s
13.2 m/s
14.4 m/s
Turbine speed (pu of nominal generator speed)
Turb
ine o
utp
ut
pow
er
(pu o
f nom
inal m
echanic
al pow
er)
Turbine Power Characteristics (Pitch angle beta = 0 deg)
Fig.2.2 Wind turbine characteristics for different wind speeds
2.2.2 WIND TURBINE GENERATING SYSTEMS
The wind turbine continuously extracts the kinetic energy of the wind by decelerating
the air mass and feeds to the generator as a mechanical power. Fraction of mechanical
energy is converted into electrical energy. The power coefficient is a function of both
tip speed ratio λ and blade pitch angle β. The tip speed ratio, which is defined as the
ratio of speed at the blade tip to the wind speed can be given as [10].
The output power of the turbine is given by the following equation.
The turbine performance coefficient can be determined from the following equation
10

Fig.2.3 characteristics, for different values of the pitch angle ß.
The characteristics, for different values of the pitch angle ß, are illustrated in
Fig.2.3. The maximum value of ( = 0.48) is achieved for ß = 0 degree and for
= 8.1. This particular value of is defined as the nominal value ( ).
2.3 TYPES OF WIND TURBINES
Wind turbines can operate with either fixed speed (actually within a speed range about
1 %) or variable speed. For fixed-speed wind turbines, the generator (induction
generator) is directly connected to the grid. Since the speed is almost fixed to the grid
frequency, and most certainly not controllable, it is not possible to store the turbulence
of the wind in form of rotational energy. Therefore, for a fixed-speed system the
turbulence of the wind results in power variations, and thus affects the power quality of
the grid [19]. For a variable-speed wind turbine, the generator is controlled by power
electronic equipment, which makes it possible to control the rotor speed. In this way the
power fluctuations caused by wind variations can be more or less absorbed by changing
the rotor speed [20] and thus power variations originating from the wind conversion
and the drive train can be reduced. Hence, the power quality impact caused by the wind
turbine can be improved compared to a fixed-speed turbine [27].
11

The rotational speed of a wind turbine is fairly low and must therefore be adjusted to
the electrical frequency. This can be done in two ways: with a gearbox or with the
number of pole pairs of the generator. The number of pole pairs sets the mechanical
speed of the generator with respect to the electrical frequency and the gearbox adjusts
the rotor speed of the turbine to the mechanical speed of the generator. In this section
the following wind turbine systems are presented.
Fixed-speed wind turbine with an induction generator.
Variable-speed wind turbine equipped with a cage-bar induction generator
or
Synchronous generator.
Variable-speed wind turbine equipped with multiple-pole synchronous
Generator.
Multiple-pole permanent-magnet synchronous generator.
Variable-speed wind turbine equipped with a doubly-fed induction
generator.
2.3.1 FIXED SPEED WIND TURBINE
For the fixed-speed wind turbine the induction generator is directly connected to the
electrical grid according to Fig. 3.4. The rotor speed of the fixed-speed wind turbine is
Fig.2.4 Fixed-speed wind turbine with an induction generator.
In principle determined by a gearbox and the pole-pair number of the generator. The
fixed-speed wind turbine system has often two fixed speeds. This is accomplished by
12
using two generators with different ratings and pole pairs, or it can be a generator with
two windings having different ratings and pole pairs [21].
2.3.2 VARIABLE SPEED WIND TURBINE
The system presented in Fig. 3.5 consists of a wind turbine equipped with a
converter connected to the stator of the generator. The generator could either be a cage-
bar induction generator or a synchronous generator. The gearbox is designed so that
maximum rotor speed corresponds to rated speed of the generator [22, 28].
Fig.2.5 Variable-speed wind turbine with a synchronous/induction generator.
2.3.3 VARIABLE SPEED WIND TURBINE WITHDFIG
This proposed system (Fig. 2.6), consists of a wind turbine with doubly-fed induction
Generator. This means that the stator is directly connected to the grid while the rotor
winding is connected via slip rings to a converter. This system has recently become
Fig.2.6 Variable-speed wind turbine with a doubly-fed induction generator (DFIG).
popular as generators for variable-speed wind turbines [23]. This is mainly due to the
fact that the power electronic converter only has to handle a fraction (20–30%) of the
total power [23, 29 and 30]. Therefore, the losses in the power electronic converter can
13

be reduced, compared to a system where the converter has to handle the total power. In
addition, the cost of the converter becomes lower due to their reduced rating.
2.4 DIESEL ENGINE
Diesel engines are a common part of our everyday lives and they widely used in
automobiles and other applications. Diesel prime-movers are attractive for applications
requiring fast responding backups at the time of peak load demands, or where local
demand for additional power necessitates augmentation of power source. Since the
response of the prime mover itself is fast, it is imperative that control techniques that
are fast converging, and involve low computational burden. The dead time of the diesel
engine is non-linear function of operating conditions, and also of the engine speed. This
significantly degrades the performance of the prime mover under disturbances.
Although certain PID schemes presently in use give acceptable performance [13].
2.4.1 SPEED CONTROL OF DIESEL ENGINE
Speed control of power generation plants driven by diesel prime-movers is difficult
because of the presence of a dead time and changes in parameters. This results in slow
plant dynamics. Self tuning PID controller based on indirect estimation of the dead time
is proposed resulting in fast response at the startup and quick recovery, when a
disturbance occurs. By using indirect estimation of the dead time and recursive least
squares parameter estimation, an explicit estimate of the plant parameters and dead time
is obtained.
Typical diesel engine model describes the fuel consumption rate as a function of
speed and mechanical power at the output of the engine. It is usually modeled by a
simple first order relating the fuel consumption (fuel rack position) to the engine
mechanical power [24]. The task of the governor is to adjust the fuel flow and then
regulate the input of the engine and the generator so as to provide the required power to
meet changing in the load.
The presence of dead-time between the actuator fuel injection and the production of
mechanical torque is very important characteristic of the diesel engine. There are also
14

system parameter uncertainties which together with the varying dead time significantly
degrade the performance of the prime mover, especially in case of a load. A diesel
engine is a nonlinear system together with a nonlinear, time-varying dead time between
the injection and production of the mechanical torque. It is commonly controlled with a
PI controller to prevent steady-state error in speed.
2.4.2 METHODS OF SPEED CONTROL OF DIESEL ENGINES
1. An adaptive speed controller method
2. Combination of neural network and fuzzy logic approaches
3. An H∞ controller for diesel engine systems.
4. Comparison of a k-predictive adaptive controller.
2.4.3 MODELING OF DIESEL ENGINE
There are many methods for modeling diesel engine, with comparison of those a k-
predictive adaptive controller method is used most widely. The general structure of the
fuel actuator system is usually represented as a first order phase lag network, which is
characterized by gain K2 and time constant τ2. Fig .5(a) shows the actuator model and
the current driver constant K3 [13]. The output of the actuator is the fuel-flow ‘υ’.
Fig 2.7 The Actuator Model and the current driver constant
The fuel flow then converted to mechanical torque ‘q’ after time delay τ1 [13].The
engine torque constant K1 which can be represented by the model of the diesel engine
as shown in Fig. 5(b).
Fig 2.8 the Diesel Engine Model
15

The governor can be defined as a mechanical or electromechanical device for
automatically controlling the speed of an engine by relating the intake of the fuel.
Several types of governors exist as mechanical-hydraulic, direct mechanical type,
electro hydraulic, electronic, and microprocessor based governors. The values K3 and
K2 can be considered to be constant for a particular engine setup. K3 is a factor that
determines the amount of the mechanical torque obtained per unit of fuel flow. K3
depends on the operating point of the prime mover. Self tuning PID controller based on
indirect estimation of the dead time is proposed for control system. Fig. 5(c) Shows the
block diagram of diesel engine model with permanent magnet generator.
2.4.4 DIESEL GENERATORS
Diesel generators also known as Gensets, provide reliable power when properly
maintained. The initial cost of a complete diesel power system is also relatively low.
They can be easily transported and are low-tech which aids in their reliability and
ensures ease of operation. So far they sound like the ideal solution for the given
application but where they fall down is in the environmental and running costs.
Standard diesel generators are fitted with synchronous generators and consequently
are controlled to run at a constant speed to guarantee constant electrical frequency. Due
to the poor efficiency at low load, most of the engines manufacturers recommend their
plants be operated no lower than 40% of rated capacity in order to prolong diesel
engine lifetime. To achieve this dump loads may need to be installed at extra cost to the
consumer. The fuel consumption rate per Kw of power is increase at lower loads and
fuel consumption at no load is still 15-30% of the full load value. At low loads the
speed of the generator will be reduced ensuring the engine is running optimally in terms
of fuel economy. Due to the above considerations the variable speed diesel generators
were recommended, the main push for the variable speed revolution is the inherent
problems of fixed speed minimum operating load and poor efficiency at low load.
Permanent magnet synchronous generator is used as variable speed diesel generator for
most of the applications.
16

Recent advancements in power electronics and control strategies have made it
possible to regulate the voltage of the Permanent Magnet Synchronous Generator
(PMSG) in many different ways. This has resulted in renewed interest in PM
synchronous generators, particularly in the remote areas with diesel engines, small-
scale power generation with small hydro heads and wind power. Fig 2.9 shows the
schematic diagram of diesel engine with Permanent Magnet Generator where K in the
fig is equal to K1*K2*K3. Typical values of system parameters were given in
Appendix A.
Fig 2.9 Block diagram of Diesel engine model with Permanent Magnet Generator
CHAPTER-III
WIND DIESEL HYBRID SYSTEM
3.1 GENERAL
In the last several years, interest in medium to large scale (100kw to multi-MW)
wind-diesel hybrid power systems for rural electrification has grown enormously
among energy officials and utility planners in the developing countries. Only a small
fraction of researchers and engineers working in the wind power industry, which is
relatively small itself, are involved in hybrid systems for off-grid applications. There is
therefore relatively little information available on the technical issues involved in
implementing a wind-diesel power system.
17

It is tempting to view the addition of wind turbines to a diesel mini-grid or isolated
system as a straight forward task, only slightly more complicated than a conventional
grid-connected installation, requiring only a few ancillary components at a relatively
modest cost. This is true for low penetration wind-diesel hybrid systems, for high
penetration systems much more sophisticated controllers and more extensive
components in addition to the wind turbines are required. This thesis focuses to some of
the control challenges faced by developers of wind-diesel systems, system stability and
long term performance. Since 1995, the National Wind Technology Center (NWTC) at
NREL has been researching wind-diesel hybrid power systems.
3.2 MAIN PRINCIPLE
The power output from wind turbines varies during the day according to the
variations in wind speed. In a large grid these variations and fluctuations in wind power
are absorbed by the strong grid, thus controlling frequency and voltage. In a small and
isolated grid the power balance between production and consumption has to be
continuously maintained in order to keep frequency of the small grid within predefined
limits. As the wind power does not supply constantly, the power balance between the
consumption, the fluctuating wind power and the diesel power must be maintained by
18

Figs 3.1 BLOCK DIAGRAM
19
DIESEL
GOVERNOR
SYNCHRONOUS
MACHINE
WIND
TURBINE
INDUCTION
MACHINE
CAPACITOR
BANK
SYSTEM
LOAD
DUMP
LOAD
EXCITER
BLOCK

Regulating the output of diesel generator to maintain system integrity of diesel
generators, the following two strategies are possible [5]. Fig.3.1 shows the model of
hybrid system.
Running the diesel continuously with some minimum load requirement
Starting and stopping the diesel to make up instantaneous wind short falls.
System which allows shutting down the diesel generator during the high wind power
availability (high wind speeds) is called as high penetration wind diesel system.
3.2.1 FREQUENCY CONTROL
Control of the hybrid power system frequency is maintained by the fast control of the
power balance between the fluctuating wind power, the dump load bank (electrical
heating elements) and the consumer load. In periods where the diesel engine is in
operation the frequency is controlled by the diesel engine governor. In periods with 100%
wind power, the frequency is controlled by absorbing the surplus wind energy in a
dynamic variable dump load or load bank.
3.2.2 VOLTAGE CONTROL
Control of the wind-diesel hybrid system voltage is maintained by the Automatic
Voltage Regulator (AVR) of the synchronous generator - also supplying reactive power
for energizing the induction generators in the wind turbines. At increasing load or
decreasing wind power, thus the wind power is not able to supply the complete
consumption the diesel genset is automatically started supplementing the wind power.
3.3 DIFFERENT MODES OF OPERATION
High penetration wind diesel system has three modes of operation. Table.1 shows the
actuation of different components in different modes [4].
1. Diesel only mode
2. Wind only mode
3. Wind diesel mode
20

Table 1: WDHS components actuation in different modes
3.3.1 WIND ONLY MODE
Power systems for wind only mode consists of wind turbine generators, synchronous
machine, dump load and the consumer load. In wind only mode (WO), wind turbine
generator supply the power demanded by the consumer load. As the wind turbine
generator is a fixed pitch constant speed type, there is no control mechanism to regulate
the power output of WTG. Therefore to regulate the frequency in wind only mode,
concept of dump load is employed in this model.The dump load consists of eight three-
phase resistors connected in series with GTO (Gate Turn-Off) type based switches. The
dump load uses an 8-bit binary command so that the load can be varied in the range of 0
to the maximum power in 256 steps [3].
During high wind penetrations, frequency is maintained at constant value by dumping
the extra power after meeting the load into dump load [26]. Wind only mode can work
only if the power produced by the wind turbine generator is greater than the consumer
load [10].
3.3.2 DIESEL ONLY MODE
Most diesel energy conversion systems use a synchronous generator to supply energy
to the load. The excitation of the generator is regulated in order to control the generator
terminal voltage. Due to the restriction of load constant frequency the speed of the diesel
21
Function Diesel only
mode
Wind only
mode
Wind diesel
mode
Active
power
generation
Diesel
generators
Wind
turbine
generators
Both wind
and diesel
generators
Frequency
control
DG speed
regulator
Dump load DG speed
regulator

engine is regulated at a constant value However, diesel engine has high fuel consumption
at light load at constant speed and usually a minimum load of about 40% is recommended
by the manufacturers
In periods with sufficient wind power to supply the electrical system and necessary
water production or heating the diesel engine(s) are disconnected from the generator by
means of a magnetic clutch and shut down in order to save fuel. In these periods the
power system is solely supplied from the wind turbine(s) (100% wind power penetration)
and there is no idle fuel consumption of the diesel engine(s). The standby diesel engine
shall be preheated in order to facilitate a fast start up.
3.3.3 WIND DIESEL MODE
In continuous wind diesel mode, both wind and diesel generators operate to meet the
load. Diesel governor regulates the diesel output power to balance the total generation
from both wind and diesel to the system load. Therefore the system frequency is
regulated by diesel governor for different wind speeds and loads. Synchronous machine
in the diesel generation set is used to regulate the system voltage. There is no concept of
dump load when both wind and diesel are in operation. In this mode diesel has to run
continuously, even at high wind speeds. In order to reduce the fuel cost of diesel gen set,
intermittent wind diesel mode is used where the diesel governor is disengaged or engaged
with synchronous machine by means of clutch. The cost of fuel in continuous wind diesel
mode is much more than the intermittent wind diesel mode. During high wind
penetrations clutch is disengaged and during low wind penetrations clutch is engaged.
3.4. MATLAB MODEL FOR DIESEL GOVERNOR SYSTEM
ACTUATOR
Pmec (pu )
1
TF 2
0.0384 s+1
1
TF 1
0.25s+1
0.009 s+1
ProductPID Controller
PID
Integrator
1s
ENGINETd
w (pu )
2
wref (pu )
1
TorqueTorque
Fig 3.2 Simulink model of diesel governor system.22

.
23
3.4.1 MATLAB MODEL FOR WIND DIESEL SYSTEM
Consumer Load
Consumer Load
HIGH PENETRATION WIND DIESEL SYSTEM WITH NO STORAGE
w
1
powergui
Discrete,Ts = 5e-005 s.
Wind 1
WT
A
B
C
a
b
c
Vtref (pu )3
1
Vtref (pu )1
1 Synchronous Condenser 480 V 330 kVA
Pm
Vf _
m
A
B
C
Switch 1
Subsystem1
MEASUREMENTS
Subsystem
MEASUREMENTS SecondaryLoad(0-446 .25 kW)
Con
tro
l A B C
Scope 5
Scope 1
SL
A
B
C
a
b
cP(w_Wind ,w_Turb )
Main Load100 kW
A B C
Load A B C
a b c
Gain 13
-1
GOVERNOR& DIESEL ENGINE
wref (pu)
w (pu)
Pmec (pu)
Iabc _WT
Vabc_WT
Iabc _Load
Vabc_Load
Vabc_SL
Iabc _S
Vabc_Load
[Iabc _SL]
[Vabc_SL]
Vabc_S
EXCITATION
vref
vd
vq
vstab
Vf
DiscreteFrequency Regulator
VabcControl
DemuxD
A
B
C
a
b
c
-C-
Asynchronous Generator480 V 330 kVA
Tm
mA
B
C
1800 rpm
-K-
<Rotor speed wm (pu)>
<Rotor speed (wm)>
Fig 3.3 Simulink model of wind diesel system

3.5 RESULTS AND DISCUSSION
3.5.1 WIND ONLY MODE
Results of wind only mode with dump load action are shown in following figures from
Fig.3.4 (a) to Fig.3.4 (d). Simulation is performed for 20 sec. sudden change of wind
speed from 10m/s to 11m/s is taken into consideration for observing the performance of
dump load for frequency regulation. Fig3.4 (a) shows the simulated wind speed. Initially
wind turbine generator generating 200 Kw, which is 150Kw more than the system load
Therefore, dump load takes 150Kw power till 10sec, to maintain system frequency at
desired value. As the wind power increases (system load constant), power absorbed by
the dump load also increases from 150Kw to 215Kw.Fig.3.4 (b), Fig.3.4(c) shows the
wind generator and dump load powers respectively. Frequency of system in wind only
mode is shown in Fig .3.4(d).
5 10 15 209.5
10
10.5
11
11.5
Time (sec)
Win
d sp
eed
in m
/s
(a)
8 10 12 14 16 18 20
59.6
59.8
60
60.2
60.4
60.6
Time (sec)
Freq
uecn
y of
Sys
tem
in H
z
(c)
5 10 15 200
50
100
150
200
250
300
350
Time (sec)
Load
and
Win
d G
ener
aor P
ower
in K
w
Load
Wind
Wind speedfrom 10 to
11m/s
266 Kw
(b)
9 10 11 12 13 14 15 16 17 18 19 20140
160
180
200
220
240
260
Time (sec)
Dum
p lo
ad p
ower
in K
w
Wind speedfrom 10 to
11m/s
(d)
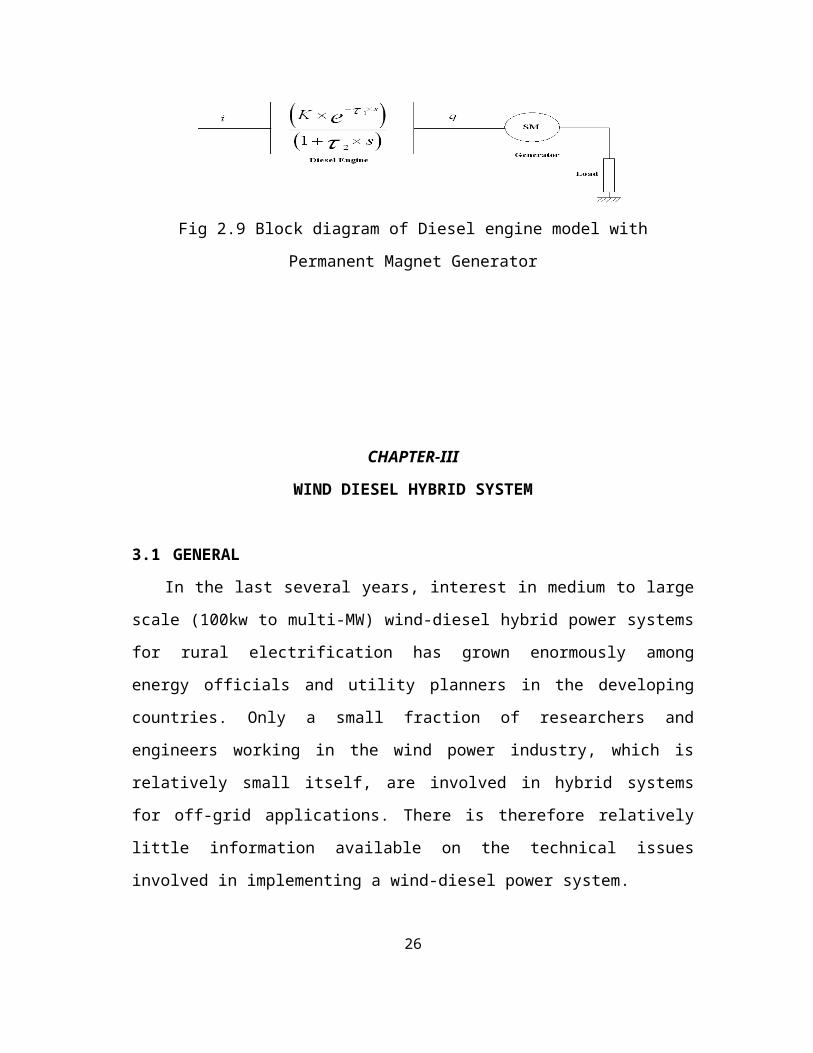
Fig.3.4(a) –Fig 3.4(d):-Simulation results of the proposed system for wind only mode :( a) wind speed in m/s.
(b) Active Powers generated wind and supplied load in Kw. (c) System Frequency in Hz (d) Dump load in Kw
3.5.2 DIESEL ONLY MODE
In Diesel only mode (DO) diesel generators supply the active and reactive power
demanded by consumer load [4]. Frequency regulation in this case is performed by the speed
regulators of diesel engine generators. Results of diesel only mode for sudden change in load
at t=10 sec is shown in following figures. Simulation is performed for 14sec. Initially system
load of 100 Kw is met by diesel generator. As the sudden change of load (extra 30 Kw) takes
place at t= 10 sec, Synchronous machine speed (frequency) falls down from desired value. By
sensing this decreasing speed by diesel governor increases its fuel input to meet the extra load.
Finally frequency settles to desired value.
Fig.3.5(a), Fig.3.5(b) and Fig.3.5(c) shows active power generated by diesel engine
generator, frequency of power system in Hz and system load respectively. Diesel

8 8.5 9 9.5 10 10.5 11 11.5 12 12.5 1360
80
100
120
140
160
180
Time (Sec)
Acti
ve P
ower
of D
iesel
Gen
erato
r in
Kw
(a)
4 6 8 10 12 14 16 18 2059.5
59.6
59.7
59.8
59.9
60
60.1
60.2
60.3
Time (Sec)
Syste
m F
requ
ency
in H
z
(c)
8 8.5 9 9.5 10 10.5 11 11.5 12 12.5 1370
80
90
100
110
120
130
140
150
160
Time (Sec)
Load
Acti
ve P
ower
in K
w
(b)

Fig.3.5(a) –Fig 3.5(c):-Simulation results of the proposed system for Diesel Only Mode :(a) Active Power generated
by diesel engine in Kw. (b) System Frequency in Hz. (c) System Load in Kw.
3.5.3 CONTINUOUS WIND DIESEL MODE
In this mode, Diesel is continuously operating with wind turbine generator to meet the
system load. Fuel cost for the operation of diesel engine in continuous mode is 20% more
than the start-stop diesel operation i.e. intermittent diesel operation [10]. Simulation of
continuous wind diesel system is carried for different wind speeds and different load
conditions for an interval of 50 sec. System load is kept constant at 100 Kw till 40 sec. Wind
speed is kept constant at 6m/s till 15 sec, changed to 7 m/s at t=15sec and to7.5 m/s at t=30
sec. Fig .3.6(a) shows the simulated wind speeds for an interval of 50 sec. Fig .3.6(b),
Fig.3.6(c), Fig.3.6(d), Fig.3.6(e) shows active power generated by diesel generators, wind
turbine generator, system load and frequency of power system in Hz respectively. Table.2
shows the power sharing by diesel and wind turbine generator at different wind speeds and
load conditions. .
When the wind speed changes from 6m/s to 7m/s (generated power increases), therefore
intake of fuel to diesel generator is reduced to reduce the power generation by it. Therefore at
different load and wind speeds intake of diesel fuel is adjusted to meet the load generation
constraint.

5 10 15 20 25 30 35 405.5
6
6.5
7
7.5
8
Time (sec)
Win
d Sp
eed
in m
/s
(a)
5 10 15 20 25 30 35 40 45 5010
20
30
40
50
60
70
80
90
Time (Sec)Activ
e Pow
ers fr
om W
ind
and
Dies
el in
Kw
Diesel
Wind
(b)

5 10 15 20 25 30 35 40 45 5090
95
100
105
110
115
Time (Sec)
Syste
m L
oad
in K
w
(c)
5 10 15 20 25 30 35 40 45 500.999
0.9995
1
1.0005
1.001
1.0015
1.002
1.0025
1.003
Time (Sec)
Spee
d of
a Sy
nchr
onou
s Mac
hine
in p
u
(e)
5 10 15 20 25 30 35 40 45 5059.9
59.95
60
60.05
60.1
60.15
60.2
60.25
60.3
Time (Sec)
Syste
m F
reque
ncy
in H
z
(d)
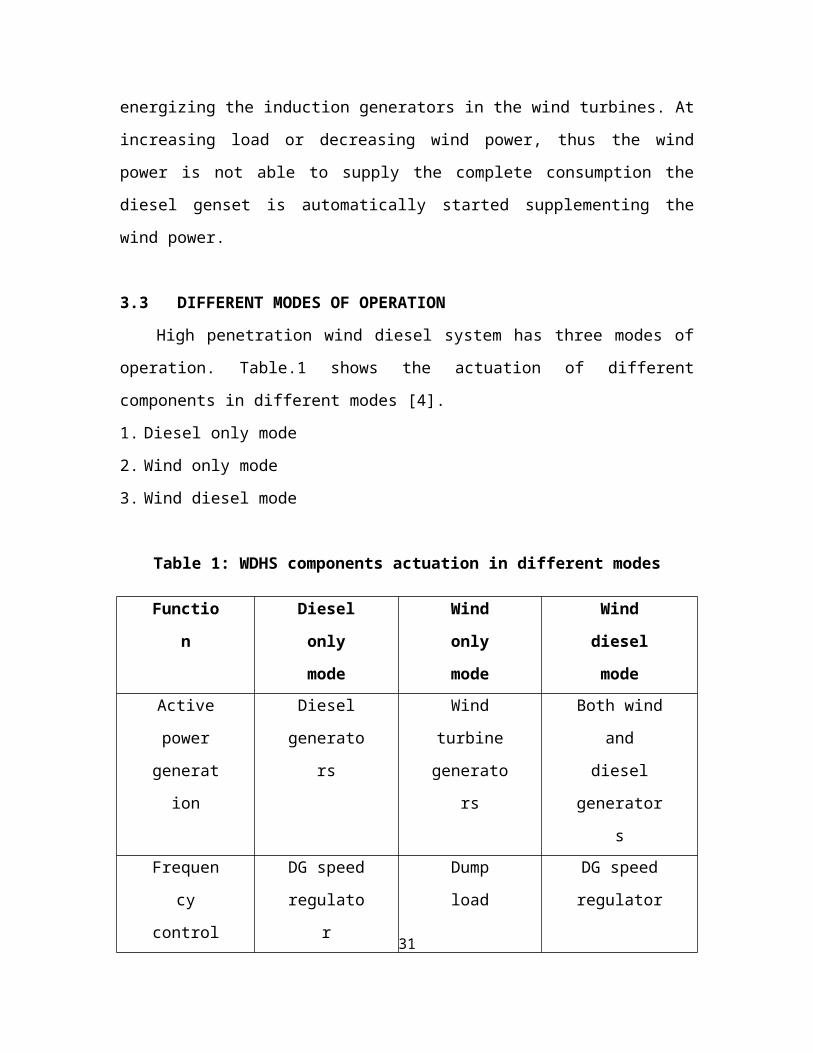

Fig.3.6(a) –Fig 3.6(e):-Simulation results of the proposed system for wind diesel mode :( a) wind speed in m/s.
(b) System Load in Kw. (c) Active Powers generated by wind and diesel generators in Kw .(d) System
Frequency in Hz.(e) Speed of Synchronous Machine in pu
Table 2.Power sharing in Wind diesel mode
Wind speed Wind
power
(Kw)
Diesel
power
(Kw)
Total
power
generated
load
6m/s (0<t<15) 16 84 100 100
7m/s (15<t<30) 50 50 100 100
7.5m/s(30<t<40) 71 29 100 100
7.5m/s(40<t<50) 71 39 110 110


3.5.4 WIND DIESEL SYSTEM WITH TRANSMISSION LINE
In this Mode, Wind turbine generator and Diesel Generator are separated by a
Transmission line of 1 mh .Wind generator and diesel generator are meeting their loads at
corresponding buses to maintain the active power balance. If one generator alone is unable to
supply its load, the extra load is met by the other generator via transmission line. Simulation
of this circuit is performed for 55 sec. Wind Speed is kept constant at 10m/s and sudden
decrease in wind speed to 9m/s from 10m/s takes place at 10 sec as shown in the Fig 3.7(a).
Load at Wind Generator is kept constant at 200Kw till 25 sec, and load increases to
250Kw at 25 sec. Load at Diesel Generator is Kept constant at 50Kw till 40 sec and sudden
increase of 50 Kw takes place at 40sec.At 10 m/s Wind generator can supply its own load.
But as the wind speed decreases to 9 m/s wind generator only produce Kw. So, in order to
maintain active power balance at Wind Generator bus extra power comes from Diesel
Generator through transmission line. Initially Diesel generator generates Kw to supply its
own load and extra power to load at wind generator bus.
At 25 sec, as the load at wind generator bus increases keeping the wind speed constant,
In order to maintain the active power balance extra power of comes from Diesel generator
through transmission line. The extra load increment at diesel generator bus is supplied by
diesel generator to maintain power balance Fig 3.7(a), Fig 3.7(b), Fig 3.7(c), Fig 3.7(d), Fig
3.7(e), Fig 3.7(f), Fig 3.7(g) and Fig 3.7(h) shows the wind speed in m/s, Active power
generated by generators, Load at generator buses, System frequency in Hz, Power flow in
line, Voltage at diesel generator bus, Voltage at wind generator bus and Reactive Power
generated by both generators respectively.

10 15 20 25 30 35 40 45 50 557
8
9
10
11
12
13
Time (Sec)
Win
d Sp
eed
in m
/s
(a)
10 15 20 25 30 35 40 45 50 5550
100
150
200
250
Time (Sec)
Acti
ve P
ower
s in
Kw
Wind Power
Diesel Power
10 15 20 25 30 35 40 45 50 550
50
100
150
200
250
300
Time (Sec)
Load
Acti
ve P
ower
in K
w
Load at Diesel Bus
Load at Wind Bus
(c)
10 15 20 25 30 35 40 45 50 550
20
40
60
80
100
120
140
Time (Sec)
Pow
er F
low
in L
ine i
n K
w
(e)
10 15 20 25 30 35 40 45 50 55450
460
470
480
490
500
510
Time (Sec)
Vol
tage a
t Dies
el G
ener
ator b
us in
pu
(g)
10 15 20 25 30 35 40 45 50 5559.6
59.7
59.8
59.9
60
60.1
60.2
60.3
60.4
Time (Sec)
Syste
m F
reque
ncy
in H
z
(d)

10 15 20 25 30 35 40 45 50 55450
460
470
480
490
500
510
Time (Sec)
Vol
tage a
t Win
d G
ener
ator b
us in
pu
(f)
10 15 20 25 30 35 40 45 50 55-120
-100
-80
-60
-40
-20
0
20
40
Time (Sec)
Reac
tive P
owers
in K
var
Diesel
Wind
(h)
Fig.3.7(a) –Fig 3.7(h):-Simulation results of the proposed system for wind diesel system with transmission line
:( a) wind speed in m/s. (b) Active Powers generated by wind and diesel generators in Kw .(c) System Loads at
Load buses (d) System Frequency in Hz.(e) Power flow in line. (f) Voltage at diesel generator bus in pu. (g)
Voltage at wind generator bus in pu. (h) Reactive Power generated by both generators in Kvar
Table 2.Power sharing in Wind diesel mode with transmission line
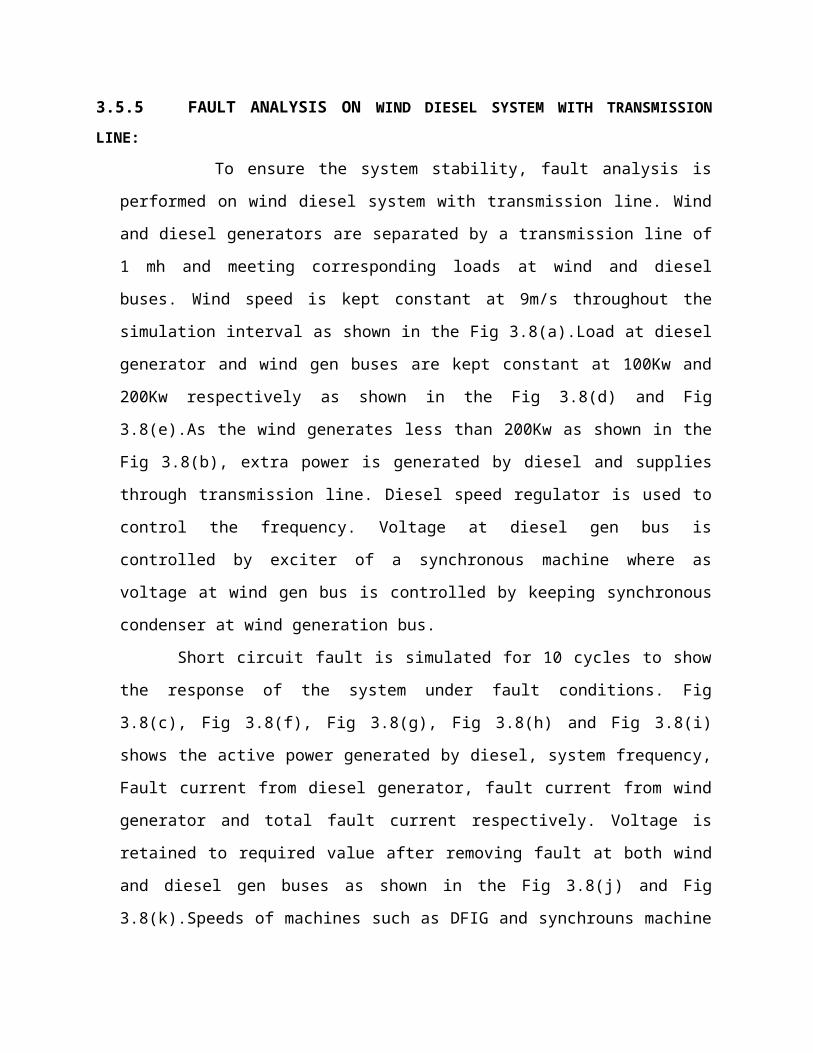
3.5.5 FAULT ANALYSIS ON WIND DIESEL SYSTEM WITH TRANSMISSION LINE:
To ensure the system stability, fault analysis is performed on wind diesel system with
transmission line. Wind and diesel generators are separated by a transmission line of 1 mh
and meeting corresponding loads at wind and diesel buses. Wind speed is kept constant at
9m/s throughout the simulation interval as shown in the Fig 3.8(a).Load at diesel generator
and wind gen buses are kept constant at 100Kw and 200Kw respectively as shown in the Fig
3.8(d) and Fig 3.8(e).As the wind generates less than 200Kw as shown in the Fig 3.8(b),
extra power is generated by diesel and supplies through transmission line. Diesel speed
regulator is used to control the frequency. Voltage at diesel gen bus is controlled by exciter
Wind
speed
Wind
power
(Kw)
Diesel
power
(Kw)
Power
Flow in line
In Kw
Load at
Diesel
gen bus
Load
At wind
gen bus
10m/s (0<t<10) 200 50 0 50 200
9m/s (10<t<25) 143 107 57 50 200
9m/s (25<t<40) 143 157 107 50 250
9m/s (40<t<55) 143 207 107 100 250

of a synchronous machine where as voltage at wind gen bus is controlled by keeping
synchronous condenser at wind generation bus.
Short circuit fault is simulated for 10 cycles to show the response of the system under
fault conditions. Fig 3.8(c), Fig 3.8(f), Fig 3.8(g), Fig 3.8(h) and Fig 3.8(i) shows the active
power generated by diesel, system frequency, Fault current from diesel generator, fault
current from wind generator and total fault current respectively. Voltage is retained to
required value after removing fault at both wind and diesel gen buses as shown in the Fig
3.8(j) and Fig 3.8(k).Speeds of machines such as DFIG and synchrouns machine are shown
in the Fig 3.8(m) and Fig 3.8(l) respectively. Power flow in the line throughout the
simulation interval is shown in the Fig 3.8(n).

0 5 10 15 20 25 308
8.5
9
9.5
10
Time (Sec)
Wind
Spe
ed in
m/s
(a)
10 12 14 16 18 20 22 24 26 28 30-300
-200
-100
0
100
200
300
400
Time (Sec)
Dies
el A
ctive
Pow
er in
Kw
(c)
10 12 14 16 18 20 22 24 26 28 300
50
100
150
200
250
300
Time (Sec)
Load
at D
iesel
Gen
bus
in K
w
(e)
10 12 14 16 18 20 22 24 26 28 30-100
0
100
200
300
400
500
600
Time (Sec)
Wind
Acti
ve P
ower
in Kw
(b)
10 12 14 16 18 20 22 24 26 28 300
20
40
60
80
100
120
140
160
180
Time (Sec)Load
Acti
ve P
ower
at Di
esel G
en bu
s in K
w
(d)
10 12 14 16 18 20 22 24 26 28 3058
58.5
59
59.5
60
60.5
61
61.5
Time (Sec)
Syste
m Fr
eque
ncy i
n Hz
(f)

10 12 14 16 18 20 22 24 26 28 30100
200
300
400
500
600
700
800
Time (Sec)
Faul
t Cur
rent
from
Dies
el G
en in
Am
ps
(g)
0 5 10 15 20 25 30-3000
-2000
-1000
0
1000
2000
3000
4000
5000
6000
Time (Sec)
Fault
Cur
rent f
rom
Wind
Gen
in A
mps
(h)
0 5 10 15 20 25 30-3000
-2000
-1000
0
1000
2000
3000
4000
5000
6000
Time (Sec)
Faul
t Cur
rent
from
Win
d G
en in
Am
ps
(i)
10 12 14 16 18 20 22 24 26 28 30300
350
400
450
500
550
600
650
Time (Sec)
Vol
tage a
t Dies
el G
en b
us in
pu
(j)
10 12 14 16 18 20 22 24 26 28 300
100
200
300
400
500
600
Time (Sec)
Vol
tage a
t Win
d ge
n bu
s in
pu
(k)
10 12 14 16 18 20 22 24 26 28 300.97
0.98
0.99
1
1.01
1.02
1.03
1.04
1.05
1.06
Time (Sec)
Spee
d of
IG in
pu
(l)

10 12 14 16 18 20 22 24 26 28 300.96
0.97
0.98
0.99
1
1.01
1.02
1.03
1.04
1.05
Time (Sec)
Spee
d of
Syn
chro
nous
Mac
hine
in p
u
(m)
10 12 14 16 18 20 22 24 26 28 30-400
-300
-200
-100
0
100
200
300
Time (Sec)
Pow
er F
low
in li
ne in
Kw
(n)
Fig.3.8(a) –Fig 3.8(n) :-Simulation results of the proposed system for wind diesel system with transmission line :
( a) wind speed in m/s. (b) Active Powers generated by wind generator in Kw.(c) Active Powers generated by wind
generator in Kw .(d) System Load at wind bus (e) System Load at wind bus (f) System Frequency in Hz.(g)Fault
current from diesel gen bus (h) Fault current from wind gen bus (i) Total fault current (j) Voltage at diesel gen bus
(k) Voltage at wind gen bus (l) Speed of DFIG (m) Speed of synchronous machine (n) Power flow in line.

CHAPTER-IV
SMOOTH TRANSISTION FROM WIND TO WIND DIESEL MODE
4.1 INTRODUCTION
A wind diesel hybrid system uses the wind turbine generators along with the diesel
generators to obtain contribution by the intermittent wind resource to the total power
produced. If the wind diesel hybrid system is capable of shutdown the diesel generators
during the high wind penetrations, then the system is called a high penetration wind diesel
system. Smooth transition from wind to wind diesel mode is required at low wind speeds
(load constant). Wind only mode can only work, if the power produced by the WTG is
greater than the consumed power by the load. Facility for Diesel engine to engage (in both
diesel only and wind diesel modes) or disengage (in wind only mode) from synchronous
machine by means of a clutch. In the Fig 4.1, a, b, c indicates fuel used for diesel only
mode, continuous wind diesel mode and intermittent wind diesel systems. From the Fig
4.1,it is clear that the fuel cost reduced for intermittent wind diesel system compared to
continuous wind diesel mode
Fig 4.1 Fuel used in diesel generator for different modes of operation
4.2 DESIGN AND OPERATION OF CONTROL MECHANISM

Smooth transition from wind mode to wind diesel mode is required at low wind speeds
[4]. There is a facility for Diesel engine to engage (in both diesel only and wind diesel
modes) or disengage (in wind only mode) from synchronous machine by means of a
clutch as shown in the Fig 4.2 .Wind only mode can only work, if the power produced by
the WTG is greater than the consumed power by the load.
WIND TURBINE
CLUTCH
Fig 4.2 Model of wind diesel system with Clutch
When the condition is not satisfied, the system frequency will fall, so the control system of
WDHS (wind diesel hybrid system) must order to start the DE (Diesel engine) and when
the speed difference between the DE and SM (synchronous machine) is small enough,
clutch is engaged to changing to the WD mode [11]. With clutch locked, the diesel engine
will supply the necessary active power first to rise and after to keep the system frequency
constant. The locked clutch mechanism with only two states is shown in the Fig.4.1.
Tc
2
pm
1
SwitchProduct 1
Gain K 3
1/(Hs+Hd)
Gain K 2
Hd
Gain K 1
HsCLUTCH
Constant
0
Ts1
3
Ws2
Ts
1
Fig.4.3 Control circuit for Locked clutch mechanism
IG
DIESEL
ENGINE
LOAD
SM

Where Td and Ts are the DE and SM torques and and are the SM and DE inertias
respectively. Switch block in Fig.7 (a) selects between 0 and under the control of
CLUTCH signal .Input mechanical power to the SM block ( * ) is calculated.
In the disengaged state, the DE and SM axis are independent and the transmitted torque
is zero. In the locked CLUTCH state (CLUTCH=1), both the SM and DE have the same
speed, the two axes behave like only one and transmitted torque in pu is given by [4]
(4)
Fig .4.2 shows the DE along with its actuator and speed regulator which outputs the
diesel speed and mechanical torque (pu) necessary to take the diesel speed to its
reference speed. Finally the DE torque equation is given by [4]
(5)
ACTUATOR
Td
1
TF 2
0.0384 s+1
1
TF 1
0.25s+1
0.009 s+1
Switch For Speed Reference
SLOW
0.25
RATED
1
PID Controller
PID
Integrator 1
1s
Integrator
1s
ENGINETd
1/2Hd
1/1.50.5 Sec Delay
Tc
2
DRUN
1
TorqueTorque
Wd
Fig .4.4 Speed control circuit for diesel engine generator
The DRUN binary input to the diesel block is the output of the Boolean switch as
shown in the Fig4.3. This frequency relay (relay2) watches the frequency in WO mode
and when the system frequency falls due to the lack of active power (may be due to
increase in load or decrease in speed), output of frequency relay becomes 1.Fig .4.3 shows
the control circuit for active power regulator..

data type
boolean
Switch1
S-RFlip -Flop
S
R
QRelay 2
Relay 1
LogicalOperator 3
NOT
LogicalOperator 2
AND
CLUTCH
Wd
Ws
DRUN
1
DOFF
0
Add 2 Abs
|u|
Fig .4.5 Active Power regulators for transition from wind to wind diesel modes
Active power regulator receives inputs as speeds of DE and SM and binary DRUN. It
outputs the CLUTCH signal. The RS flip flop sets its output to ‘1’when the relative speed
between the DE and SM is very less
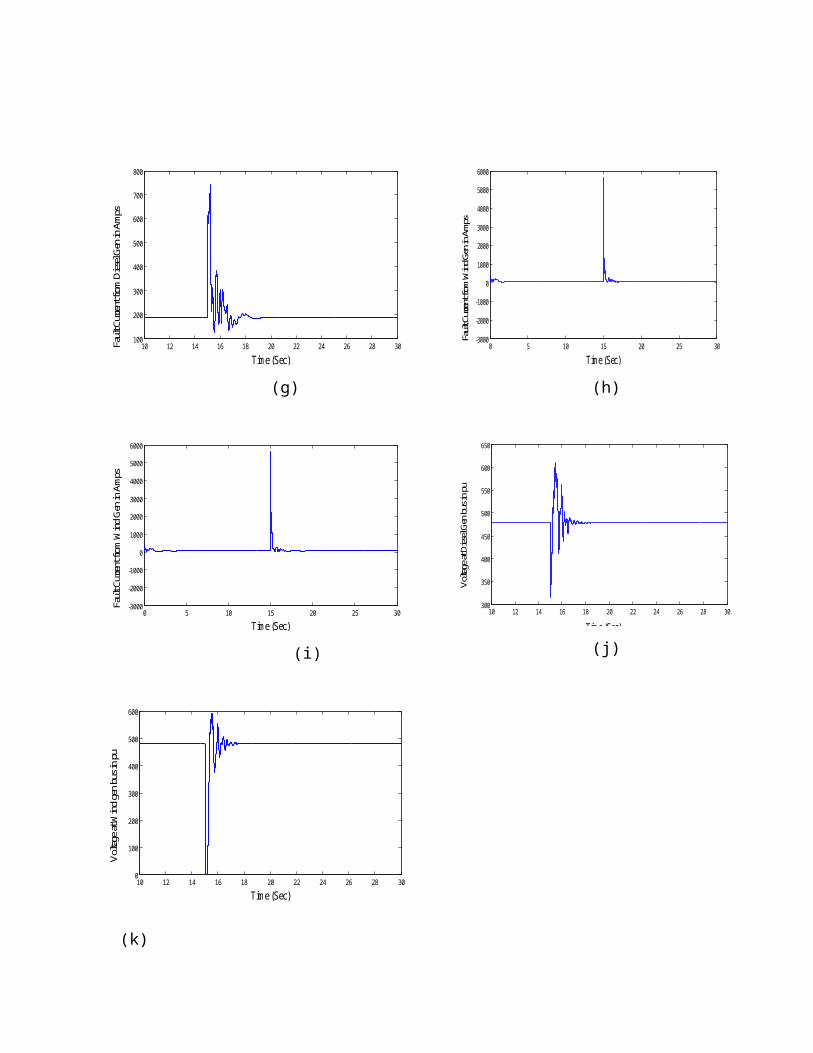
4.3 Results and Discussion:
Initially Wind turbine generator supplying 93Kw (8m/s) to supply the load of 93 Kw.
DE reference speed set at 0.25 pu even though it is not supplying any load to simulate the
cranking process. Sudden change in the load takes place at t=7 sec. Frequency relay senses
the change in frequency at t=7.15 sec and changes the DRUN signal to ‘1’ as shown in the
Fig4.6(a).To regulate the active power balance diesel engine must be engaged to SM via
clutch. When the DE is started the cranking system is switched on until the DE reached
the firing speed where the internal combustion process starts. Once the firing speed is
reached DE cranking system is switched off and the DE speed controller is activated with
a speed reference of 1 pu. For this study cranking time and firing speed is taken as 0.5 sec
and 0.3 pu respectively. Therefore speed reference to DE changes to 1 pu at t=7.65 sec
(7.15+0.5) .Fig .7(b) shows the difference in speeds of DE and SM. When the speed
difference is zero, CLUTCH signal is changed to ‘1’ at t=9.5sec.Fig .4.6(c) shows the
change in CLUTCH signal. Fig4.6 (d), Fig.4.6 (e), Fig.4.6 (f) and Fig.4.6 (g) shows the
active power generated by diesel engine generator, wind turbine generator, speed and
system load respectively.

6 6.2 6.4 6.6 6.8 7 7.2 7.4 7.6 7.8 8
0
0.2
0.4
0.6
0.8
1
1.2
Time(sec)
DR
UN
(D
iese
l Run
) Si
gnal
Load changeat 7 sec
Mains failureat t=7.15sec
DRUN=1
(a)
4 5 6 7 8 9 10 11 12
0
0.2
0.4
0.6
0.8
1
Time (sec)
CL
UT
CH
Sig
nal
Clutch locked at t=9.5 sec
Load changeat t= 7 sec
(b)
0 2 4 6 8 10 12 14 16 18 20
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (sec)
Dif
fere
nce
in s
peed
s in
pu
(SM
and
DE
)
Clucth locks at t=9.5 sec
Chnage of speed reference at t=7.65
sec (7.15+0.5).
(c)

4.4 MATLAB MODEL OF COMPLETE CONTROL MECHANISM
ACTUATOR
0.5 Sec Delay
pm
1
conversion
boolean
TF 2
0.0384 s+1
1
TF 1
0.25s+1
0.009 s+1Switch 2
Switch1
Switch Saturation
SLOW
-C-
S-RFlip -Flop
S
R
QRelay 2
Relay 1
RATED
1
Product 1
PID Controller
PID
Logical
NOT
Logica
AND
Integrator 1
1s
Integrator
1s
Hs
1
Hd
-K-
Gain K 4
1/1.5
Wd
Ws
ENGINETd
DRUN1
0
DOFF
0
Constant
0
Add 2 Abs
|u|
1/(Hs+Hd)
1/1.8
DRUN
3
Ws2
Ts1
Wd
Torque
Td
Td
DRUN
CLUTCH
Fig 4.7 Matlab model of control circui

5 10 15 20-20
0
20
40
60
80
100
Time (sec)
Act
ive
Pow
er o
f Sy
nchr
onou
s M
achi
ne S
et in
Kw
Clutch lockedat t=9.5 sec
Extra load at t = 7 sec
(d)
5 7 9 11 13 15 17 19 2020
40
60
80
100
120
140
Time (sec)
Out
put W
ind
Pow
er in
KW
at 8
m/s
ec
Extra loadat t= 7 sec
Clucth lockedat t= 9.65 sec
(e)
0 2 4 6 8 10 12 14 16 18 20
0.2
0.4
0.6
0.8
1
1.2
Time (Sec)
Spee
d / F
requ
ency
in p
u
DE Speed
SM speed
DE Crankingfinished att=7.65sec
Clutch lockedat t=9.65 sec
SM speed
(f)

4 6 8 10 12 14 16 18 2020
40
60
80
100
120
140
160
180
Time (sec)
Loa
d in
Kw
Extra load of 45Kw at t=7 sec
(g)
Figs 4.6(a)-4.6(g): (a) Change of diesel run (DRUN) signal from wind to wind diesel mode. (b) Change of
clutch (CLUTCH) signal from wind to wind diesel mode. (c) Difference in speeds of diesel generator and
synchronous machine. (d) Active Power generated by diesel engine generator in Kw (e) Active Power
generated by wind turbine generator in Kw (f) Speeds of SM and DE in transition from wind to wind diesel
mode (g) System load in Kw
CHAPTER-V

WIND DIESEL HYBRID SYSTEM WITH VARIABLE SPEED WIND TURBINE
5.1 GENERAL
A wind energy system can be added to diesel engine system to provide some of the
load power and fixed or variable speed operation may be considered. Variable speed
operation has many advantages in terms of reduction of mechanical stress and smooth the
fluctuation of the power injected into the supply. Moreover variable speed operation can
increase the production of the energy and reduce noise. A power electronic interface is
needed to match the AC bus fixed frequency and voltage with the variable voltage and
frequency of the wind energy system.
Wind turbines using a doubly-fed induction generator (DFIG) consist of a wound
rotor induction generator and an AC/DC/AC IGBT-based PWM converter modeled by
voltage sources. The stator winding is connected directly to the 60 Hz grid while the rotor
is fed at variable frequency through the AC/DC/AC converter. The DFIG technology
allows extracting maximum energy from the wind for low wind speeds by optimizing the
turbine speed, while minimizing mechanical stresses on the turbine during gusts of wind.
The optimum turbine speed producing maximum mechanical energy for a given wind
speed is proportional to the wind speed.
5.2 CONTROL TECHNIQUE FOR DFIG
The wind turbine and the doubly-fed induction generator (WTDFIG) are shown in
the Fig 5.1. The AC/DC/AC converter is divided into two components: the rotor-side
converter (Crotor) and the grid-side converter (Cgrid). Crotor and Cgrid are Voltage-
Sourced Converters that use forced-commutated power electronic devices (IGBTs) to
synthesize an AC voltage from a DC voltage source. A capacitor connected on the DC
side acts as the DC voltage source. A coupling inductor L is used to connect Cgrid to the
grid. The three-phase rotor winding is connected to Crotor by slip rings and brushes and
the three-phase stator winding is directly connected to the grid. The power captured by the
wind turbine is converted into electrical power by the induction generator and it is
transmitted to the grid by the stator and the rotor windings. The control system generates
the pitch angle command and the voltage command signals Vr and Vgc for Crotor and
Cgrid respectively in order to control the power of the wind turbine, the DC bus voltage
and the reactive power or the voltage at the grid terminals.
The model is based on using the grid-side converter (VSC) for the wind turbine
terminal voltage regulation. This is carried out in parallel with its main function and that is
to regulate the DC bus voltage of the back-to back converter. Moreover, the maximum
power tracking job is carried out by the generator (rotor) side converter. The connection
diagram of the DFIG with a brief description for the converter’s control actions and the
required signals are shown in Fig.5.1 [25].
Fig.5.1 Connection diagram of the DFIG with control technique signals
5.2.1 ROTOR SIDE CONVERTER CONTROL LOOPS
The q-axis component control loop is dedicated to track the maximum output power
using the instant values of the incident wind speed and the generator rotational speed with
a maximum power tracking characteristic for the turbine as shown in the Fig 5.2. The
difference between the optimum power (Pref) and the summation of the actual generated
power and the power losses activates a PI (proportional integral) controller that generates
the q-axis reference current (I*q). This reference current value is then compared with the
actual q-axis rotor current to activate a PI controller which in turn generates the reference
q-axis voltage reference signal (V*q) for the rotor-side converter.

Fig 5.2 Turbine power characteristics for a different value of turbine speed
On the other hand, the d-axis component control loop is dedicated to generate the d-axis
voltage reference signal (V*d). The q-axis reference current (I*d) is generated by passing
the error through PI controller generated by comparing reference Voltage at stator (Vref)
and actual voltage at stator (Vact). This reference current value is then compared with the
actual q-axis rotor current to activate a PI controller which in turn generates the reference
d-axis voltage reference signal (V*d) for the rotor-side converter. Using such reference
current settings, the rotor converter supplies only the reactive power of the rotor. By
setting of stator reference reactive power to zero, one gets unity power factor condition at
stator of the generator terminals. The rotor-side converter control loops are illustrated in
Fig. 5.3.

Vq*
2
Vd*
1
Rate Limiter 1
Rate Limiter Rate Limiter
Limiter 1
PIPI
PIPI
Iqr
6
P_B1
5
Refernce Power fromOptimum Power Tracker
4
Idr
3
V_B1
2
V_ref
1Idr*
Iqr*
Fig.5.3 Control loops for rotor side converter
In this figure, the d-axis and q-axis reference voltages (V’d and V’q) are added with the
voltage drops in the rotor circuit parameters to get the actual reference signal at the
converter side.
5.2.2 STATOR SIDE CONVERTER CONTROL LOOPS
The difference between the actual value of voltage of the DC link (VDC,actual) and the
required reference value (VDC,ref) activates a PI (proportional integral) controller to
produce the required d-axis current component control signal (I*d). This is then compared
with the actual grid-side converter d-axis current and the generated error activates another
PI controller to generate the d-axis reference voltage signal (V*d) for the grid-side
converter.
A similar scenario is applied for generating the q-axis voltage reference signal (V* q)
which is dedicated to regulate the grid terminal voltage (VGrid, actual) by making the q-axis
reference current as zero (I*q,ref). This is then compared with the actual grid-side converter
q-axis current and the generated error activates another PI controller to generate the q-axis
reference voltage signal (V*q) for the grid-side converter. The corresponding block
diagrams for the grid-side converter control loops are presented in Fig. 4.5.The parameters
of the Figures 4.3, 4.4 and 4.5 and for Eq.4.1 are presented in List of symbols.
Vd*
2
Vq*
1PI
PIPI
Rate Limiter 3
Rate Limiter 2
Iq
5
Id
4
Iq_ref
3
Vdc
2
Vdc_ref
1Idref
Fig.5.4 Control loops for grid side converter
5.2.3 PITCH ANGLE CONTROL LOOP
As the turbine rotational speed (ω) exceeds the reference value at which the output
power of the turbine is 1 pu, the pitch angle actuator is activated to adjust the turbine
mechanical power to 1 pu. The corresponding block diagram for the pitch angle control
loop is presented in Fig. 4.6. The maximum pitch angle is set to be 45° while the pitch
angle rate of change is limited to 1°/s..
Fig.5.5 Pitch angle control loop
5.3 MODEL OF WIND DIESEL SYSTEM WITH DFIG
Fig.5.6 Block diagram model of wind diesel system with DFIG
Wind
TurbineDFIG
Diesel
Engine
Load SM

5.3.1 MATLAB BASED MODEL OF WIND DIESEL SYSTEM WITH DFIG.
w
1
powergui
Phasors
Wind1
Wind turbineData acquisition
V1_B575
I1_B575
P_mean
Q_mean
Wind TurbineDoubly -Fed Induction Generator
(Phasor Type )1
Wind (m/s)
Trip
mA
B
C
mA
B
C
Wind (m/s)
Trip
WindBus
A
B
C
a
b
c
Vtref (pu )3
1
Vtref (pu )1
1
Trip
0
Three2
Vabc
IabcA B C
a b c
Three1
Vabc
IabcA
B C
a b c
A
B
C
A
B
CSynchronous Machine
480 V 260 kVA
Pm
Vf _
m
A
B
C
Subsystem1
Measurements
Subsystem
Measurements
Scope 5
Scope 4
Scope 3
Scope 20
Scope 2
Scope 1
MW5
4/120
MW4
1800
Load 1 A B C
a b c
Load25 kW2
A B CLoad25 kW1
A B C
Load25 kW
A B C
Load A B C
a b c
GOVERNOR& DIESEL ENGINE
wref (pu)
w (pu)
Pmec (pu)
Iabc _S1
Vabc_S1
Iabc _Load
Iabc _Load 1
Vabc_Load
Iabc _S
Vabc_S
Vabc_Load 1
ExcitationSystem1
vrefvdvqvstab
VfDiesel
Bus
A
B
C
a
b
c
Demux
3-Phase Breaker
A
B
C
a
b
c
<Rotor speed wm (pu)>
<Vdc (V)>
<wr (pu)>
<P (pu)>
<Q (pu)>
<Pitch_angle (deg)>
Fig 5.7 Wind diesel system with transmission line

5.4 RESULTS AND DISCUSSION
The wind diesel hybrid system i.e., wind turbine ,diesel generator and doubly fed
induction generator along with proposed control loops for grid-side converter and rotor-
side converter are modeled in MATLAB/Simulink. The ratings of the DFIG (doubly-fed
induction generator), wind turbine and the simulation parameters of the system are
represented in the Appendix. The performance of the system has been analyzed with and
without transmission line for different loads
5.4.1 PERORMANCE OF WIND DIESEL SYSTEM WITH ‘R’ LOAD.
In this model, Variable speed wind generator is equipped with diesel generator is used
to supply stand alone loads. DFIG improves the system stability and efficiency of isolated
system. In this simulated model 275 Kw of DFIG is equipped with 275 Kw of diesel
generator. Pitch angle control mechanism is used to regulate the output power beyond the
particular speed. Diesel unit balances the system power for changing wind speeds. DFIG
control mechanism and synchronous machine uses to control the voltage of the system.
Simulation is performed for 60 sec. Wind speed is kept constant at 20sec and sudden
increase of wind speed from 10 to 12m/s is taken place at 20 sec. Fig5.8 (a) shows the
simulated wind speed. When the wind speed increases the power output from diesel
generator decreases in order to maintain the active power balance as shown in the
Fig5.8(b).Fig5.8(c),Fig5.8(d) and Fig5.8(e) shows the System load, system frequency and
speed of DFIG in pu respectively. As the load increases at 40 sec keeping the wind speed
constant, the extra load of 50Kw is met by diesel generator. DC voltage across capacitor
maintained constant at 800V by using stator side converter loops of doubly fed induction
generator. System voltage is maintained constant at 1pu by operating the DFIG in constant
voltage regulation mode. Frequency is maintained constant by using diesel governor
which senses the change in speed and acts according to it. Speed of DFIG increases from
1pu to 1.2 pu as wind speed changes from 10m/s to 12 m/s
Fig5.8 (f), Fig5.8 (g), and Fig5.8 (h) shows the dc voltage at capacitor, Reactive power
supplied by diesel and wind generators respectively.

15 20 25 30 35 40 45 50 55 607
8
9
10
11
12
13
14
15
Time (Sec)
Win
d Sp
eed
in m
/s
(a)
15 20 25 30 35 40 45 50 55 60
140
160
180
200
220
240
260
280
Time (Sec)
Load
Acti
ve P
ower
in K
w
(c)
15 20 25 30 35 40 45 50 55 60
0
50
100
150
200
250
300
Time (Sec)
Activ
e Pow
er in
Kw
DieselPower
Wind Power
(b)
15 20 25 30 35 40 45 50 55 6059
59.5
60
60.5
61
Time (Sec)
Syste
m F
requ
ency
in H
z
(d)

15 20 25 30 35 40 45 50 55 600.9
0.95
1
1.05
1.1
1.15
1.2
1.25
Time (Sec)
Spee
d of
DFI
G in
pu
(e)
15 20 25 30 35 40 45 50 55 60790
795
800
805
810
815
Time (Sec)
DC v
oltag
e at C
apac
itor i
n Vo
lts
(f)
15 20 25 30 35 40 45 50 55 60
0.8
0.85
0.9
0.95
1
Time (Sec)
Syste
m Vo
ltage
in pu
(g)
20 25 30 35 40 45 50 55 60
-40
-30
-20
-10
0
10
20
30
40
Time (Sec)
Reac
tive P
ower
from
Dies
el G
en in
Kva
r
(h)

Fig.5.8 (a) –Fig 5.8(h):-Simulation results of the proposed system for Variable wind system equipped with
diesel system:( a) wind speed in m/s. (b) Active Powers generated wind and diesel in Kw. (c) Load active
power in Kw.(d) System Frequency in Hz (e) Speed of DFIG in pu.(f) DC Voltage at Capacitor in Volts.(g)
System Voltage in pu.(h)Reactive Power supplied by diesel generator in Kvar.
5.4.2 PERFORRMANCE OF WIND DIESEL SYSTEM FOR ‘RL’ LOAD
For this RL load Simulation is performed for 100 sec. Wind speed is kept constant till
40sec and sudden increase of wind speed from 8 to 12m/s is taken place at 40 sec. Fig5.9
(a) shows the simulated wind speed. At 8 m/s wind turbine generator is producing
maximum power of 55Kw.So in order to meet total load of 200 Kw, diesel is
producing145Kw. When the wind speed increases the power output from diesel generator
decreases in order to maintain the active power balance as shown in the Fig 5.9(b).
Load Reactive power kept constant at 70Kvar till 70 sec as shown in the Fig5.9(d), and
sudden increase in reactive load is met by DFIG and diesel generator in order to make the
system voltage constant. DFIG is operated in voltage regulation mode in order to maintain
voltage constant at diesel bus. Load active power is kept constant at 200Kw and sudden
increase of 50Kw takes place at 70 sec as shown in the Fig 5.9(c). This extra load is met by
diesel generator. System Voltage at both the buses and system frequency maintained
constant at desired value as shown in the Fig 5.9(e) and Fig 5.9(f) respectively.
Fig 5.9(g), Fig 5.9(h), Fig 5.9(i) and Fig5.9 (j) shows the Speed of DFIG in pu, DC voltage
across capacitor, Reactive powers supplied by diesel and wind generators respectively.

30 40 50 60 70 80 90 1006
7
8
9
10
11
12
13
14
15
Time (Sec)
Win
d Sp
eed
in m
/s
(a)
40 50 60 70 80 90 100140
160
180
200
220
240
260
Time (Sec)
Load
Acti
ve P
ower
in K
w
(c)
40 50 60 70 80 90 10059
59.5
60
60.5
61
Time (Sec)
Syste
m F
reque
ncy
in H
z
(e)
30 40 50 60 70 80 90 100
0
50
100
150
200
250
Time (Sec)
Activ
e Pow
ers in
KW Wind Power
Diesel Power
(b)
40 50 60 70 80 90 10050
60
70
80
90
100
Time (Sec)
Load
Rea
ctive
Pow
er in
Kvar
(d)
40 50 60 70 80 90 100
0.8
0.85
0.9
0.95
1
1.05
Time (Sec)
Syste
m Vo
ltage
in pu
(f)

40 50 60 70 80 90 1000.7
0.8
0.9
1
1.1
1.2
Time (Sec)
Spee
d of
DFI
G in
pu
(g)
40 50 60 70 80 90 100
20
40
60
80
100
120
140
160
Time (Sec)
Reac
tive P
ower
from
DFI
G in
Kva
r
(i)
40 50 60 70 80 90 100795
800
805
810
815
Time (Sec)
DC V
oltag
e at C
apac
itor i
n Vo
lts
(h)
40 50 60 70 80 90 100-80
-60
-40
-20
0
20
40
60
80
Time (Sec)
Reac
tive P
ower
from
Dies
el G
en in
Kva
r
(j)
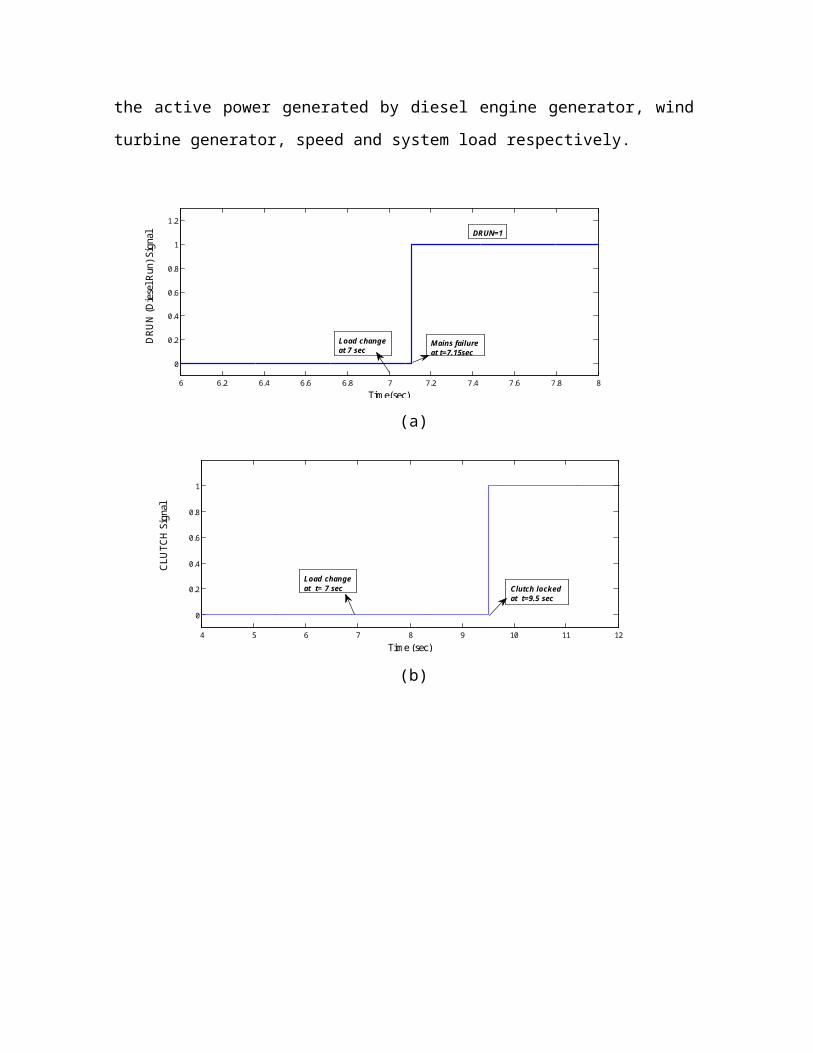
Fig.5.9 (a) –Fig 5.9(j):-Simulation results of the proposed system for Variable wind system equipped with
diesel system (For RL load) : ( a) wind speed in m/s. (b) Active Powers generated wind and diesel in Kw.
(c) Load active power in Kw.(d) Load Reactive power in Kw (e).System Frequency in Hz (f) System
Voltage in pu (g) Speed of DFIG in pu. (h) DC Voltage at Capacitor in Volts. (i) Reactive Power supplied
by DFIG in Kvar. (j) Reactive Power supplied by diesel generator in Kvar
5.4.3 PERFORMANCE OF WIND DIESEL SYSTEM WITH TRANSMISSION
LINE FOR ‘R’ LOAD.
In this model of simulation, a transmission line of 1 mH is used to transfer power between
wind and diesel energy systems. Loads are being met at both wind generator and diesel
generator buses. If the wind power is unable to meet its own load at particular wind speed,
extra load is met by diesel generator by transferring the power via transmission line .If the
wind is generating more power, then the extra power transfers to load at diesel generator
bus. So, diesel generator reduces its generation to maintain frequency to scheduled value.
Voltage at both the buses are maintained constant by operating DFIG in voltage regulation
mode and also by using the reactive power generated by synchronous machine.
Simulation is performed for 100 sec to obtain the performance of wind diesel
system for different wind speeds. Wind speed is maintained constant at 12m/s till 20 sec,
sudden increase from 12 to 14m/s at 20 sec and sudden decrease from 14m/s to 10m/s at
50sec is taken place as shown in Fig5.10(a). Load at diesel generator bus is maintained
constant at 140Kw throughout the simulation interval as shown in the Fig 5.10(d), where as
load at wind generator bus maintained constant at 140Kw till 75sec and sudden increase of
40Kw in its load took place at 75sec as shown in the Fig 5.10(c)
During 0<t<20 sec wind is able to generate 197Kw as shown in the Fig5.10(b), the extra
power of 57Kw flows through transmission line to supply the load at diesel generator bus.
so, the diesel generates 83Kw as shown in the Fig5.10(b) to maintain active power balance.
When the wind speed increases to 14m/s, pitch control is comes into action to limit the
turbine speed as shown in the Fig 5.10(e). During 20<t<40,when the wind speed increases
to 14m/s, which is the maximum speed the turbine can withstand. Speed of DFIG is shown
in the Fig5.10 (g). Diesel generator output decreases further, so that the maximum power
for load at diesel generator is met by wind generator via transmission line.

Power flow in line for different wind speeds and loads is shown in the Fig
5.10(f).System frequency is maintained constant at 60Hz as shown in the Fig5.10 (h), by
maintaining active power balance between total generation and load. Speed of synchronous
machine which is maintained constant at different conditions is shown in the Fig 5.10(i).
Fig 5.10(j),Fig 5.10(k),Fig 5.10(l) ,Fig 5.10(m),Fig 5.10(n),Fig 5.10(o) and Fig 5.10(p)
shows the dc voltage across capacitor, voltage at diesel generator load bus, voltage at wind
generator load bus, Reactive power generated by diesel generator ,Reactive power at wind
generator bus and reactive power flown in line respectively.

20 30 40 50 60 70 80 90 1007
8
9
10
11
12
13
14
15
Time (Sec)
Win
d Sp
eed
in m
/s
(a)
20 30 40 50 60 70 80 90 100130
140
150
160
170
180
190
Time (Sec)Loa
d A
ctiv
e P
ower
at
Win
d b
us in
Kw
(c)
20 30 40 50 60 70 80 90 1000
0.5
1
1.5
2
2.5
3
Time(Sec)
Pitc
h A
ngle
in
Deg
ress
(e)
20 30 40 50 60 70 80 90 1000.95
1
1.05
1.1
1.15
1.2
1.25
Time (Sec)
Spee
d of
DFI
G i
n p
u
(g)
20 30 40 50 60 70 80 90 1000
50
100
150
200
250
300
Time (Sec)
Act
ive
Pow
ers
in K
w
Diesel Power
Wind Power
(b)
20 30 40 50 60 70 80 90 100100
120
140
160
180
200
Time (Sec)Loa
d A
ctiv
e P
ower
at
Die
sel B
us in
Kw
(d)
20 30 40 50 60 70 80 90 100-150
-100
-50
0
50
100
Time (Sec)
Pow
er F
low
in L
ine
in K
w
(f)
20 30 40 50 60 70 80 90 10059
59.5
60
60.5
61
Time (Sec)
Syste
m F
requ
ency
in
Hz
(h)

20 30 40 50 60 70 80 90 1000.95
1
1.05
Time (Sec)
Spee
d of
Syn
chro
nous
Mac
hine
in p
u
(i)
20 30 40 50 60 70 80 90 1000.8
0.85
0.9
0.95
1
1.05
1.1
1.15
Time (Sec)
Vol
tage
at
Die
sel
Gen
Loa
d bu
s in
pu
(k)
20 30 40 50 60 70 80 90 10010
20
30
40
50
60
70
80
90
100
Time (Sec)
Rea
ctiv
e Po
wer
from
Die
sel G
en in
Kva
r
(m)
20 30 40 50 60 70 80 90 100-60
-40
-20
0
20
40
60
Time (Sec)
Reac
tive P
ower
flow
in L
ine i
n K
var
(o)
20 30 40 50 60 70 80 90 100770
780
790
800
810
820
830
Time (Sec)
DC
Vol
tage
at
Cap
cito
r in
Vol
ts
(j)
20 30 40 50 60 70 80 90 100
0.85
0.9
0.95
1
1.05
1.1
1.15
Time (Sec)V
olta
ge a
t W
ind
Gen
erat
or B
us in
pu
(l)
20 30 40 50 60 70 80 90 100-50
0
50
Time (Sec)
Rea
ctiv
e Po
wer
from
DFI
G in
Kva
r
(n)

Fig.5.10 (a) –Fig 5.10(0):-Simulation results of the proposed system for Varaible wind system equipped
with diesel system (For R load) : ( a) wind speed in m/s. (b) Active Powers generated wind and diesel in
Kw. (c) Load active power in Kw at wind bus d) Load active power in Kw at diesel. e) Pitch angle in
degrees .f)Power flow in line in Kw. g)speed of DFIG in pu. (h).System Frequency in Hz (i) Speed of
synchronous machine in pu.(j) DC voltage at capacitor in volts (k) Voltage at diesel gen bus in pu (l)
Voltage at wind gen bus in pu (m) Reactive Power supplied by diesel in Kvar .(n) Reactive Power supplied
by DFIG in Kvar (o) Reactive power flow in line in Kvar.
5.4.4 PERFORMANCE OF WIND DIESEL SYSTEM FOR ‘RL’ LOAD WITH
TRANSMISSION LINE
In this model of simulation, a transmission line of 1 mH is used to transfer power
between wind and diesel energy systems. Reactive Loads are being met at both wind
generator and diesel generator buses. If the wind power is unable to meet its own load at
particular wind speed, extra load is met by diesel generator by transferring the power via
transmission line .If the wind is generating more power, then the extra power transfers to
load at diesel generator bus. So, diesel generator reduces its generation to maintain
frequency to scheduled value. Voltage at both the buses are maintained constant by
operating DFIG in voltage regulation mode and also by using the reactive power
generated by synchronous machine.
Simulation is performed for 100 sec to obtain the performance of wind diesel
system for different wind speeds. Wind speed is maintained constant at 12m/s till 20 sec,
sudden increase from 12 to 14m/s at 20 sec and sudden decrease from 14m/s to 10m/s at
50sec is taken place as shown in Fig5.11(a). Load at diesel generator bus is maintained
constant at 140Kw throughout the simulation interval as shown in the Fig 5.11(c), where
as load at wind generator bus maintained constant at 140Kw till 75sec and sudden
increase of 40Kw in its load took place at 75sec as shown in the Fig 5.10(c).During
0<t<20 sec wind is able to generate 197Kw as shown in the Fig5.10(b), the extra power
of 57Kw flows through transmission line to supply the load at diesel generator bus. So,
the diesel generates 83Kw as shown in the Fig5.11 (b) to maintain active power balance.
When the wind speed increases to 14m/s, pitch control is comes into action to limit the
turbine speed as shown in the Fig 5.10(e). During 20<t<40,when the wind speed
increases to 14m/s, which is the maximum speed the turbine can withstand. Speed of

DFIG is shown in the Fig5.10 (g). Diesel generator output decreases further, so that the
maximum power for load at diesel generator is met by wind generator via transmission
line.
Power flow in line for different wind speeds and loads is shown in the Fig
5.10(f).System frequency is maintained constant at 60Hz as shown in the Fig5.10 (h), by
maintaining active power balance between total generation and load. Speed of
synchronous machine which is maintained constant at different conditions is shown in the
Fig 5.10(i).Fig5.10(j),Fig 5.10(k),Fig 5.10(l) ,Fig 5.10(m),Fig 5.10(n),Fig 5.10(o) ,Fig
5.10(p) and Fig 5.10(q) shows the dc voltage across capacitor, voltage at diesel generator
load bus, voltage at wind generator load bus, Reactive power generated by wind
generator, load reactive power at diesel generator bus, reactive power flow in line,
Reactive power at diesel generator bus and reactive load at wind gen bus respectively.

20 30 40 50 60 70 80 90 1008
9
10
11
12
13
14
15
Time (Sec)
Win
d Sp
eed
in m
/s
(a)
20 30 40 50 60 70 80 90 100100
110
120
130
140
150
160
Time (Sec)
Load
at D
iese
l gen
bus
in K
w
(c)
20 30 40 50 60 70 80 90 100
0
50
100
150
200
250
300
Time (Sec)
Activ
e Pow
ers in
Kw
Wind
Diesel
(b)
20 30 40 50 60 70 80 90 100130
140
150
160
170
180
190
Time (Sec)
Load
at W
ind
gen
bus i
n K
w
(d)

20 30 40 50 60 70 80 90 1000
0.5
1
1.5
2
2.5
3
Time (Sec)
Pitch
Ang
le in
Deg
rees
(e)
20 30 40 50 60 70 80 90 1000.95
1
1.05
1.1
1.15
1.2
1.25
Time (Sec)
Spee
d of
DFI
G in
pu
(g)
20 30 40 50 60 70 80 90 1000.95
1
1.05
Time (Sec)
Spee
d of
Syn
chrn
ous M
achi
ne in
pu
(i)
20 30 40 50 60 70 80 90 100-150
-100
-50
0
50
100
Time (Sec)
Powe
r Flow
in L
ine in
Kw
(f)
20 30 40 50 60 70 80 90 10059
59.5
60
60.5
61
Time (Sec)
Syste
m F
requ
ency
in H
z
(h)
20 30 40 50 60 70 80 90 100770
780
790
800
810
820
830
Time (Sec)
DC V
oltag
e at
Cap
acito
r in
Volts
(j)

20 30 40 50 60 70 80 90 1000.8
0.85
0.9
0.95
1
1.05
1.1
1.15
Time (Sec)
Volta
ge at
Dies
el Ge
n Bu
s in
pu
(k)
20 30 40 50 60 70 80 90 1000
20
40
60
80
100
Time (Sec)
Reac
tive P
ower
From
Win
d Ge
n in
Kva
r
(m)
20 30 40 50 60 70 80 90 100-40
-30
-20
-10
0
10
20
30
40
Time (Sec)
React
ive Po
wer F
low in
Line
in K
var
(o)
20 30 40 50 60 70 80 90 1000.8
0.85
0.9
0.95
1
1.05
1.1
1.15
Time (Sec)
Volta
ge at
Win
d Ge
n Bu
s in
pu
(l)
20 30 40 50 60 70 80 90 10010
20
30
40
50
60
70
80
Time(Sec)
Load
Rea
ctive
Pow
er at
Dies
el Ge
n bu
s
(n)
20 30 40 50 60 70 80 90 1000
20
40
60
80
100
Time (Sec)
Reac
tive P
ower
supp
lied
by d
iesel
gen
(p)
20 30 40 50 60 70 80 90 10035
40
45
50
55
60
65
Time (Sec)
Load
Rea
ctive
Pow
er at
Win
d Ge
n Bu
s
(q)
Fig.5.11 (a) –Fig 5.11(q):-Simulation results of the proposed system for Variable wind system equipped
with diesel system (For R load) : ( a) wind speed in m/s. (b) Active Powers generated wind and diesel in
Kw. (c) Load active power in Kw at diesel bus d) Load active power in Kw at wind. e) Pitch angle in
degrees .f) Power flow in line in Kw. g) Speed of DFIG in pu. (h).System Frequency in Hz (i) Speed of
synchronous machine in pu.(j) DC voltage at capacitor in volts (k) Voltage at diesel gen bus in pu (l)
Voltage at wind gen bus in pu (m) Reactive Power by wind in Kvar .(n)Load reactive power at diesel gen
bus (o) Reactive power flow in line in Kvar.(p) Reactive power supplied by diesel gen in Kvar.(q)
Reactive load at wind gen bus in Kvar
5.4.5 FAULT ANALYSIS ON WIND DIESEL SYSTEM FOR ‘R’ LOAD WITH
TRANSMISSION LINE
To ensure the system stability, fault analysis is performed on wind diesel system with
transmission line. Wind and diesel generators are separated by a transmission line of 1
mh and meeting corresponding loads at wind and diesel buses. Wind speed is kept
constant at 11m/s throughout the simulation interval as shown in the Fig 5.12(a).Load at
diesel generator and wind gen buses are kept constant at 140Kw and 140Kw respectively
as shown in the Fig 5.12(d) and Fig 5.12(e).As the wind generates less than 200Kw as
shown in the Fig 5.12(b), extra power is generated by diesel and supplies through
transmission line. Diesel speed regulator is used to control the frequency. Voltage at
diesel gen bus is controlled by exciter of a synchronous machine where as voltage at
wind gen bus is controlled by keeping synchronous condenser at wind generation bus.
Short circuit fault is simulated for 10 cycles to show the response of the system under
fault conditions. Fig 5.12(c), Fig 5.12(f), Fig 5.12(g), Fig 5.12(h) and Fig 5.12(i) shows

the active power generated by diesel, system frequency, Fault current from diesel
generator, fault current from wind generator and total fault current respectively. Voltage
is retained to required value after removing fault at both wind and diesel gen buses as
shown in the Fig 5.12(l) and Fig 5.12(n).Speeds of machines such as DFIG and
synchrouns machine are shown in the Fig 5.12(j) and Fig 5.12(m) respectively. Speed of
DFIG remains at 1.1 pu before and after the fault where as speed of synchronous machine
at 1 pu. Power flow in the line throughout the simulation interval is shown in the Fig
5.12(o).DC voltage across capacitor is shown in the Fig5.12 (k).
10 12 14 16 18 20 22 24 26 28 3010
10.5
11
11.5
12
Time (Sec)
Win
d Sp
eed
in m
/s
(a)
10 15 20 25 30 35 40-100
0
100
200
300
400
500
600
700
Time (Sec)
Dies
el A
ctive
Pow
er in
Kw
(c)
10 12 14 16 18 20 22 24 26 28 30-100
0
100
200
300
400
500
600
700
800
Time (Sec)
Win
d Tu
rbin
e Acti
ve P
ower
in K
w
(b)
10 12 14 16 18 20 22 24 26 28 300
100
200
300
400
500
600
700
800
Time (Sec)Load
Acti
ve P
ower
at Di
esel g
en bu
s in K
w
(d)

10 12 14 16 18 20 22 24 26 28 30-100
0
100
200
300
400
500
Time (Sec)Load
Acti
ve P
ower
at W
ind
Gen
bus
in K
w
(e)
10 12 14 16 18 20 22 24 26 28 300
200
400
600
800
1000
1200
1400
Time (Sec)
Faul
t cur
rent
from
dies
el ge
n in
Am
ps
(g)
10 12 14 16 18 20 22 24 26 28 30-1000
-500
0
500
1000
1500
2000
2500
Time (Sec)
Faul
t Cur
rent i
n Am
ps
(i)
10 12 14 16 18 20 22 24 26 28 3058
58.5
59
59.5
60
60.5
61
61.5
Time (Sec)
Syste
m F
requ
ency
in H
z
(f)
10 12 14 16 18 20 22 24 26 28 30
200
400
600
800
1000
1200
1400
Time (Sec)
Faul
t Cur
rent f
rom
Win
d Ge
n in
Am
ps
(h)
10 12 14 16 18 20 22 24 26 28 300.96
0.97
0.98
0.99
1
1.01
1.02
1.03
1.04
1.05
Time (Sec)
Spee
d of a
Syn
chro
nous
Mac
hine i
n pu
(j)

10 12 14 16 18 20 22 24 26 28 30500
1000
1500
2000
2500
3000
3500
Time (Sec)
DC V
oltag
e acro
ss Ca
pacit
or in
Vol
ts
(k)
15 20 25 30 35 401.085
1.09
1.095
1.1
1.105
1.11
1.115
1.12
Time (Sec)
DFI
G S
peed
in p
u
(m)
15 20 25 30 35 40-200
-150
-100
-50
0
50
100
150
200
250
Time (Sec)
Powe
r Flo
w in
line
in K
w
(o)
10 15 20 25 30 35 400
0.5
1
1.5
2
2.5
Time (Sec)
Volta
ge at
Win
d ge
n bu
s in
pu
(l)
10 15 20 25 30 350
0.5
1
1.5
2
2.5
Time (Sec)
Vol
tage a
t Dies
el ge
n bu
s in
pu
(n)
Fig.5.12(a) –Fig 5.12(o) :-Simulation results of the proposed system for wind diesel system with
transmission line :( a) wind speed in m/s. (b) Active Powers generated by wind generator in Kw.(c) Active
Powers generated by wind generator in Kw .(d) System Load at diesel bus (e) System Load at wind bus (f)
System Frequency in Hz.(g)Fault current from diesel gen bus (h) Fault current from wind gen bus (i) Total
fault current (j) Speed of synchronous machine (k) DC Voltage at capacitor (l)Voltage at wind gen bus (m)
Speed of DFIG (n) Voltage at wind gen bus (o) Power flow in line.

CHAPTER VI
CONCLUSIONS AND FUTURE WORK
6.1 GENERAL
The main objective of the work has been to Voltage and Frequency control of wind
diesel hybrid power system with fixed and variable wind turbines. The simulation of
wind diesel hybrid system has been done under different wind speeds and loads. The
following are the main conclusions of the investigations carried out in this thesis work.
6.2 CONCLUSIONS
The Hybrid system consists of wind turbine generators, diesel generators, dump load,
synchronous machine, Induction generator and the consumer load was simulated.
Frequency is regulated in all the modes of operation such as wind only mode, diesel only
mode and continuous wind diesel mode to assure the power quality. In order to reduce
the diesel fuel cost in continuous wind diesel mode, smooth control circuit was designed
for transition from wind to wind diesel mode during load wind penetrations and high
system loads. Locking clutch mechanism is used for engaging and disengaging the
diesel engine from synchronous machine in this transition.
Quality of power supplied to the autonomous system is improved by controlling the
frequency to a desired value. Power fluctuation has reduced much by using variable
speed wind turbine generator compared to fixed speed wind turbine. Compared with the
conventional diesel-wind system, the response of the system equipped with DFIG during
wind fluctuation and load changes is more stable, and the ability for reactive power
output of DFIG is improved the reactive power control in system operation observably.
Analysis also shows that in this kind of system, the diesel generator terminal voltage and
the upper limits for reactive power output of DFIG are important operative parameters
affecting the operation performance.
6.3 FUTURE WORK
This technique can be practically implemented and a thorough study can be made on its
performance for different wind speeds and loads. In the present work, voltage and frequency

control is done for isolated systems .It can be further extended to grid mode of operation.
Photovoltaic cell, Fuel cell and Micro turbine can also be integrated into wind diesel system.
The performance of isolated diesel-wind power systems can be improved effectively by
enhancing the wind generators. Moreover, the laboratory prototypes of these systems may
be developed to validate the design, model and control techniques.
REFERNCES

1. Anne-Marie Borbely and Jan F. Kreider, Distributed Generation: the power paradigm
For the new millennium, vol. I. United States of America: CRC, 2001, p.400.
2. T. Ackermann, Wind Power in Power Systems, England: John Wiley and Sons, Ltd,
pp. 53-78, 2005.
3. Wind Force 12, Report by the European Wind Energy Association (EWEA), October
2002.
4. Canadian Wind Energy Association (CanWEA), http://www.canwea.ca
5. Documentation on Wind diesel system with no storage.www.nrel.gov.in
6. J.K. Kaldellis, ―An Integrated model for performance simulation of hybrid wind-
diesel Systems, Renewable Energy, vol (32) (2007) pp.1544-1564
7. R.Sebastian, J.Quesada, “Distributed control system for frequency control in a
isolated Wind system,” renewable energy, vol (31) (2006) pp. 285-305.
8. H.S.ko, T.Niimura, K y.Lee, “An intelligent controller for a remote wind-diesel power
system-Design and Dynamic performance analysis,” IEEE Transcation on power
engineering , vol. (4), july ( 2003), pp:2147-2152
9. R.Sebastian, “Smooth transition from wind only to wind diesel mode in an
autonomous Wind diesel system with a battery based energy system” renewable energy,
vol (33) (2007) pp. 454-466.
10. Das D, Aditya SK, Kothari DP. “Dynamics of diesel and wind turbine generators on an
Isolated power system”. International Journal of Electrical Power & Energy Systems
1999; 21(3):183–9.
11. S.H.Karki, R.B.Chedid, and R.Ramdan “Probabilistic production costing of Diesel-
Wind energy conversions systems”, IEEE Transaction on energy conversion, Vol. (15),
(3), sep (2000), pp. 284-289.
12. Yeager KE, Willis JR. Modeling of emergency diesel generators in an 800 Megawatt
Nuclear power plant. IEEE Trans Energy Conversion1994;8(3).
13. S. Roy, 0. P. Malik and G. S. Hope, “Adaptive Control Of Speed And Equivalence
Ratio Dynamics Of A Diesel Driven Power-Plant” ,IEEE Transactions on Energy
Conversion, Vol. 8, No. 1, March 1993

14. P.A.Stott, M.A. Mucller, ―Modelling fully variable speed hybrid wind-diesel
systems‖, Universities Power Engineering Conference,vol(1) sep(2006) pp.212-217.
15. Katiraei Farid, Abbey Chad, “Diesel plant sizing and performance Analysis of a
remote wind-diesel microgrid ,” Power Engineering Society General Meeting, IEEE
(June) (2006), pp.1-8.
16. Ruben pena, Roberto Cardenas,” Control strategy for a doubly fed induction
generators for a wind diesel energy system,” Power Engineering Society General
Meeting, IEEE (June) (2002), pp.1-8.
17. Fadia M. A. Ghali Shawki H. Arafah, “Dynamic Analysis of Hybrid WindDiesel
SystemWith Three-Level Inverter”, ISIE 2001, Pusan, KOREA, pp.740-745, 2001.
18. Wind/diesel/desalination with high wind penetration. Internal report Danvest
energy. /www.danvest.com.
19. M. P. Papadopoulos, S. A. Papathanassiou, N. G. Boulaxis, and S. T. Tentzerakis,
“Voltage quality change by grid-connected wind turbines,” in European Wind Energy
Conference, Nice, France, 1999, pp. 783–785.
20. T. Petru and T. Thiringer, “Active flicker reduction from a sea-based 2.5 MW wind
park connected to a weak grid,” in Proc. Nordic Workshop on Power and Industrial
Electronics, Aalborg, Denmark, June, 13–16, 2002.
21. T. Thiringer and J. Linders, “Control by variable rotor speed of a fixed-pitch wind
turbine operating in a wide speed range,” IEEE Trans. on Energy Conversion, vol. 8,
no. 3, pp. 520–526, Sept. 1993.
22. D. Panda, E.L. Benedict, G. Venkataramanan, and T.A. Lipo, "A novel control
strategy for the rotor side control of a doubly-fed induction machine," in Proc. 2001
IEEE Thirty-Sixth IAS Annual Meeting Industry Applications Conf., Vol. 3, pp. 1695 -
1702.
23. R. Pena, J.C. Clare, and G.M. Asher, "Doubly fed induction generator using back-
tobackPWM converters and its application to variable-speed wind-energy generation,"
IEE Proc-Electr. Power Appl.., vol. 143, No. 3 pp. 231-241, May 1996.
24. G.S. Stavrakakis, G.N.Kariniotakisr, A general simulation algorithm for the accurate
assesment of isolated diesel-wind turbines system interaction ,IEEE transactions on
Energy Conversion, vol(10) sep(1995) pp.577-583.

25. T.H.M. EL-Fouly, E.F. EL-Saadany and M.M.A. Salama, “Voltage Regulation of Wind
Farms Equipped with Variable-Speed Doubly-Fed Induction Generators Wind
Turbines”, in Proc. of IEEE Power Engineering Society General Meeting, 24-28
June2007, pp. 1-8.
26. Matlab SimPower Software (Ver 7.3, 2006) [Online].Available:
www.mathworks.com/products/simpower/.
27. Woei-Luen Chen and Yuan-Yih Hsu, “Controller Design for an Induction GeneratorDriven
by a Variable-Speed Wind Turbine”, IEEE Trans. on Energy Conversion, vol.21, No. 3,
pp.625-635, September 2006
28. L. Zhang, C. Watthanasarn, and W. Shepherd, "Application of a matrix converter for the
power control of a variable-speed wind-turbine driving a doubly-fed induction generator,"
in Proc. 1997 23rd International Conference on Industrial Electronics, Control and
Instrumentation, IECON 97, vol. 2, pp. 906-911.
29. Roy Billinton, and Wijarn Wangdee, “Reliability-Based Transmission Reinforcement
Planning Associated With Large-Scale Wind Farms”, IEEE Trans. on Power Systems,
Vol. 22, No. 1, pp.34-41, February 2007.
30. Rogério G. de Almeida and J. A. Peças Lopes, “Participation of Doubly Fed Induction
Wind Generators in System Frequency Regulation”, IEEE Trans. on Power Systems,vol.
22, No. 3, pp.944-950, August 2007
APPENDIX
SIMULATION PARAMETERS
INDUCTION GENERATOR PARAMETERS:
275 KVA, 480V, 4 pole, 60 Hz three-phase induction generator.

Stator resistance (Rs) = 0.016 pu.
Rotor resistance (R’r) = 0.015 pu.
Stator leakage inductance (Lls) = 0.06 pu.
Rotor leakage inductance (L’lr) = 0.06 pu.
Magnetizing inductance (Lm) = 2.9 pu.
Inertia constant (H) = 2 s.
Number of pair poles (P) = 2.
Number of units = 1.
TURBINE PARAMETERS:
Base wind speed = 12 m/s.
CP(λ, β) coefficients: c1 = 0.5176, c2 = 116, c3 = 0.4, c4 = 5, c5 = 21, and c6 = 0.0068.
CP, max = 0.48.
λnom = 8.1.
K = 0.73.
ω base = 1.2.
SYNCHRONOUS GENERATOR PARAMETERS:
275KVA, 480V, 4 pole, 60 Hz three-phase synchronous generator.
Stator resistance (Rs) = 0.016 pu.
Inertia constant (H) = 2 s.
Number of pair poles (P) = 2.
Number of units = 1.
