5. synchronmaschine - iee: Über uns · maschine arbeitet als motor. die zeigerdiagramme bild 5.5...
TRANSCRIPT
Elektrische Energietechnik (S8803) Seite 5.1Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
5. SynchronmaschineDie Synchronmaschine ist wie die Asynchronmaschine eine Drehfeldmaschine, wobei einwesentlicher Unterschied vorliegt: Sie kann nur bei einer synchronen Drehzahl betrieben
werden, die durch Netzfrequenz f1 und Polpaarzahl p zu gegeben ist. Diesen1 � nd �
f1
pBedingung macht die Synchronmaschine für den Betrieb als Motor (ohne Umrichter zurFrequenzverstellung) weniger geeignet. Es gibt jedoch auch Synchronmaschinen-An-triebe mit Frequenzumrichter [Meyer], die aber hier nicht behandelt werden sollen. Fürden Anlauf sind im allgemeinen Zusatzeinrichtungen erforderlich.Die Synchronmaschine ohne Frequenzumrichter ist heute als Drehstromgenerator bedeut-sam. Alle Drehstromgeneratoren in Dampf- und Wasserkraftwerken und Fahrzeugen sindin der Regel mit Synchronmaschinen ausgerüstet. Sie sind heute mit Nennleistungen biszu 1300 MW in Betrieb.
5.1 Aufbau und Wirkungsweise
Aufbau
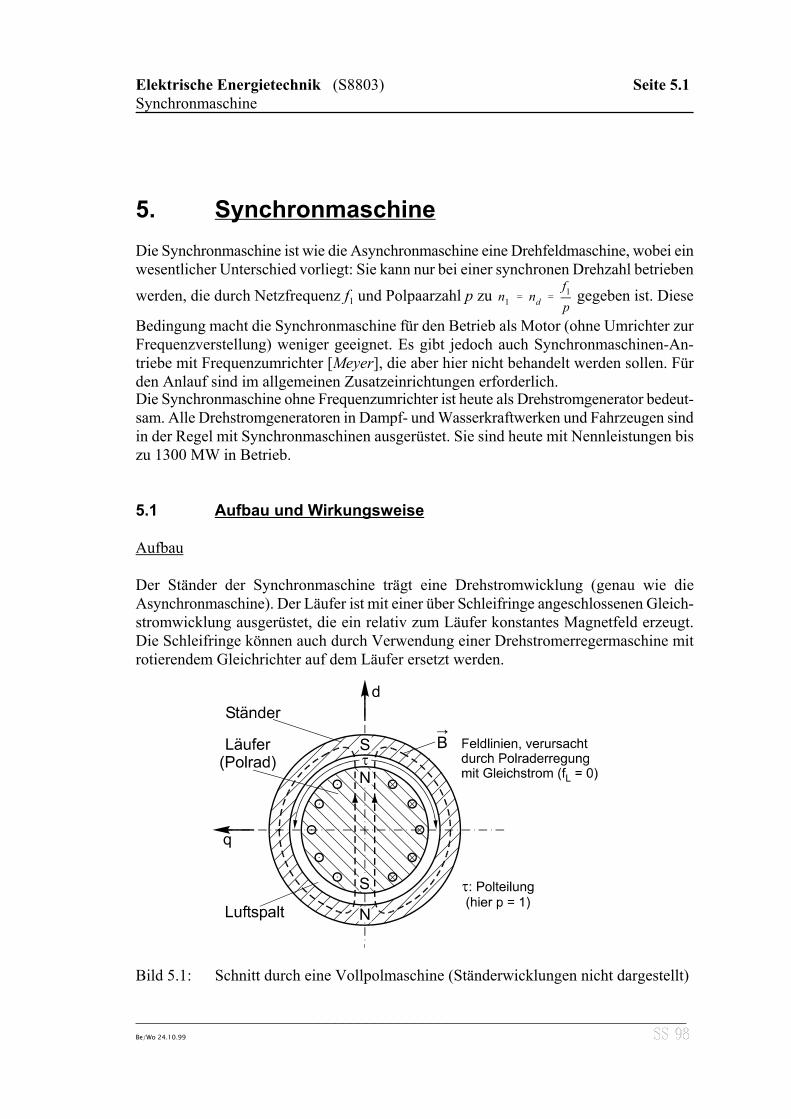
Der Ständer der Synchronmaschine trägt eine Drehstromwicklung (genau wie dieAsynchronmaschine). Der Läufer ist mit einer über Schleifringe angeschlossenen Gleich-stromwicklung ausgerüstet, die ein relativ zum Läufer konstantes Magnetfeld erzeugt.Die Schleifringe können auch durch Verwendung einer Drehstromerregermaschine mitrotierendem Gleichrichter auf dem Läufer ersetzt werden.
Bild 5.1: Schnitt durch eine Vollpolmaschine (Ständerwicklungen nicht dargestellt)
Seite 5.2 Elektrische Energietechnik (S8803)Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
Da der Läufer mit Synchrondrehzahl rotiert, entsteht relativ zum Ständer ein Drehfeld mitnd = n1.
Wir unterscheiden zwei Ausführungsformen des Läufers: Vollpol-Läufer und Schenkel-pol-Läufer.
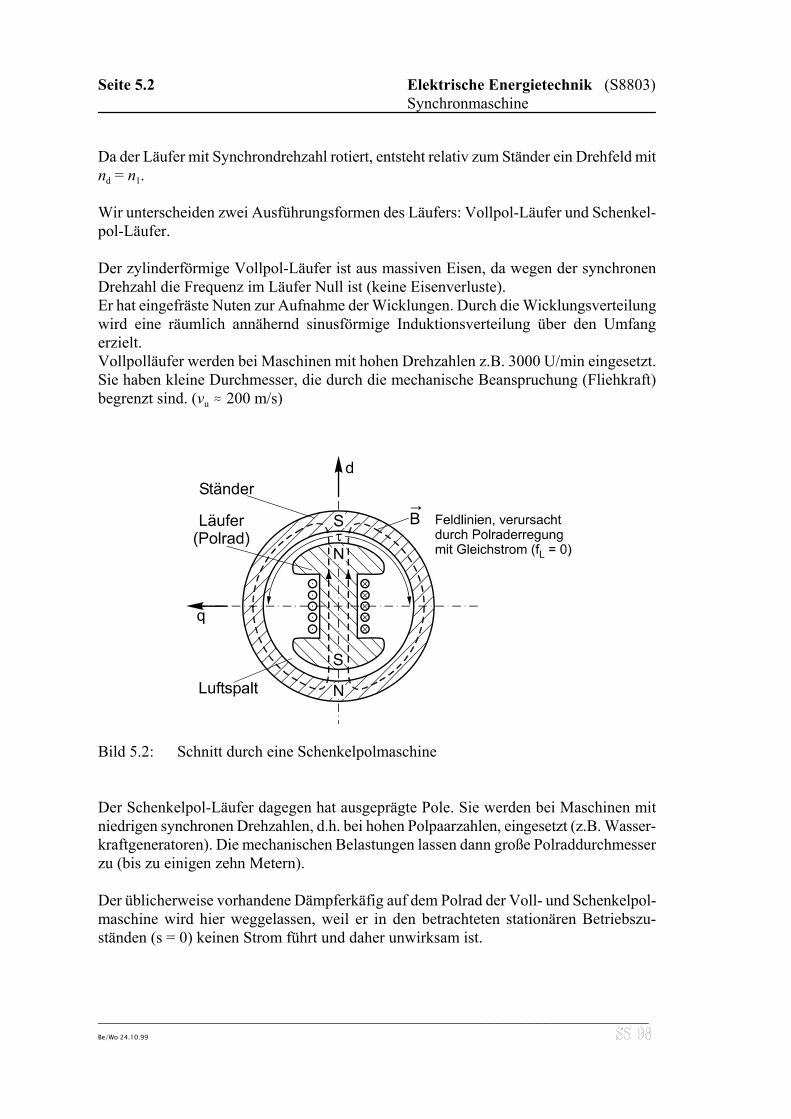
Der zylinderförmige Vollpol-Läufer ist aus massiven Eisen, da wegen der synchronenDrehzahl die Frequenz im Läufer Null ist (keine Eisenverluste).Er hat eingefräste Nuten zur Aufnahme der Wicklungen. Durch die Wicklungsverteilungwird eine räumlich annähernd sinusförmige Induktionsverteilung über den Umfangerzielt.Vollpolläufer werden bei Maschinen mit hohen Drehzahlen z.B. 3000 U/min eingesetzt.Sie haben kleine Durchmesser, die durch die mechanische Beanspruchung (Fliehkraft)begrenzt sind. (vu K 200 m/s)
Bild 5.2: Schnitt durch eine Schenkelpolmaschine
Der Schenkelpol-Läufer dagegen hat ausgeprägte Pole. Sie werden bei Maschinen mitniedrigen synchronen Drehzahlen, d.h. bei hohen Polpaarzahlen, eingesetzt (z.B. Wasser-kraftgeneratoren). Die mechanischen Belastungen lassen dann große Polraddurchmesserzu (bis zu einigen zehn Metern).
Der üblicherweise vorhandene Dämpferkäfig auf dem Polrad der Voll- und Schenkelpol-maschine wird hier weggelassen, weil er in den betrachteten stationären Betriebszu-ständen (s = 0) keinen Strom führt und daher unwirksam ist.
Elektrische Energietechnik (S8803) Seite 5.3Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
B(x,t) � B̂ ] sin( πτ
x � ω t) (5.1)
Φp � ‹τ
mB (x, t) ] ml dx (5.2)
up � N1]dΦp(t)
dt�
dψp(t)dt
(5.3)
Wirkungsweise:
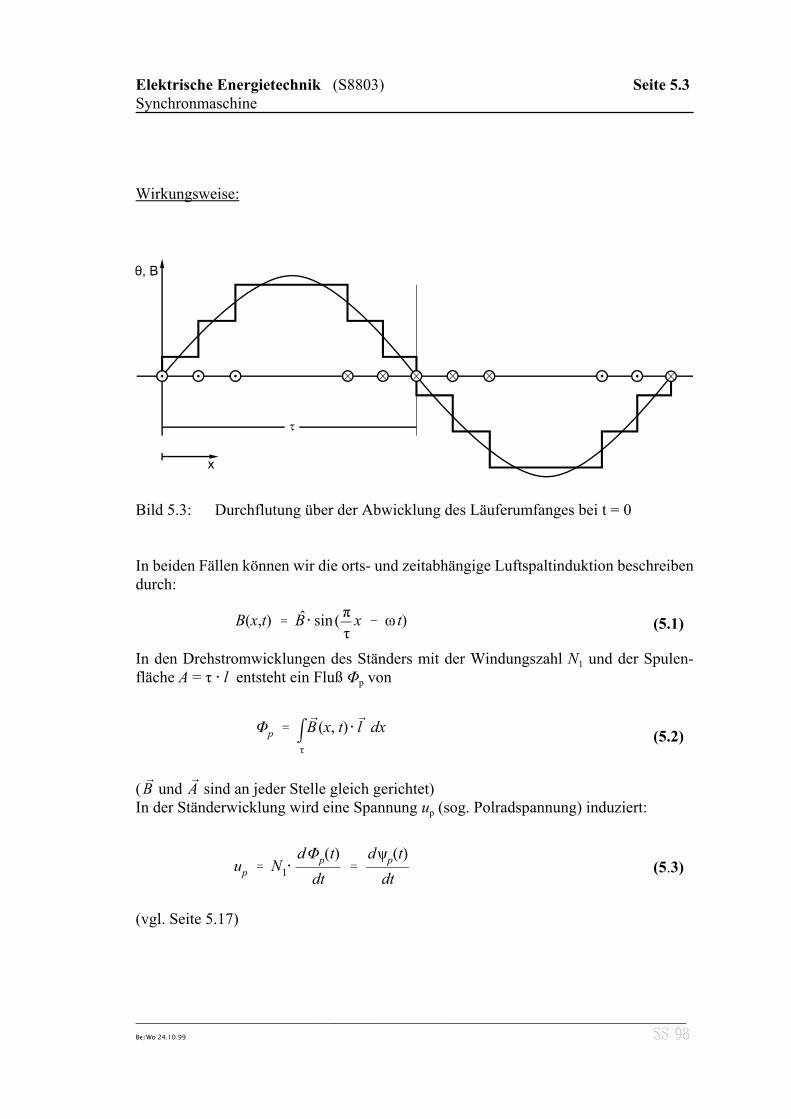
Bild 5.3: Durchflutung über der Abwicklung des Läuferumfanges bei t = 0
In beiden Fällen können wir die orts- und zeitabhängige Luftspaltinduktion beschreibendurch:
In den Drehstromwicklungen des Ständers mit der Windungszahl N1 und der Spulen-fläche A = τ ] l entsteht ein Fluß Φp von
( und sind an jeder Stelle gleich gerichtet)mB mAIn der Ständerwicklung wird eine Spannung up (sog. Polradspannung) induziert:
(vgl. Seite 5.17)
Seite 5.4 Elektrische Energietechnik (S8803)Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
Leerlauf der Synchronmaschine im Generatorbetrieb:
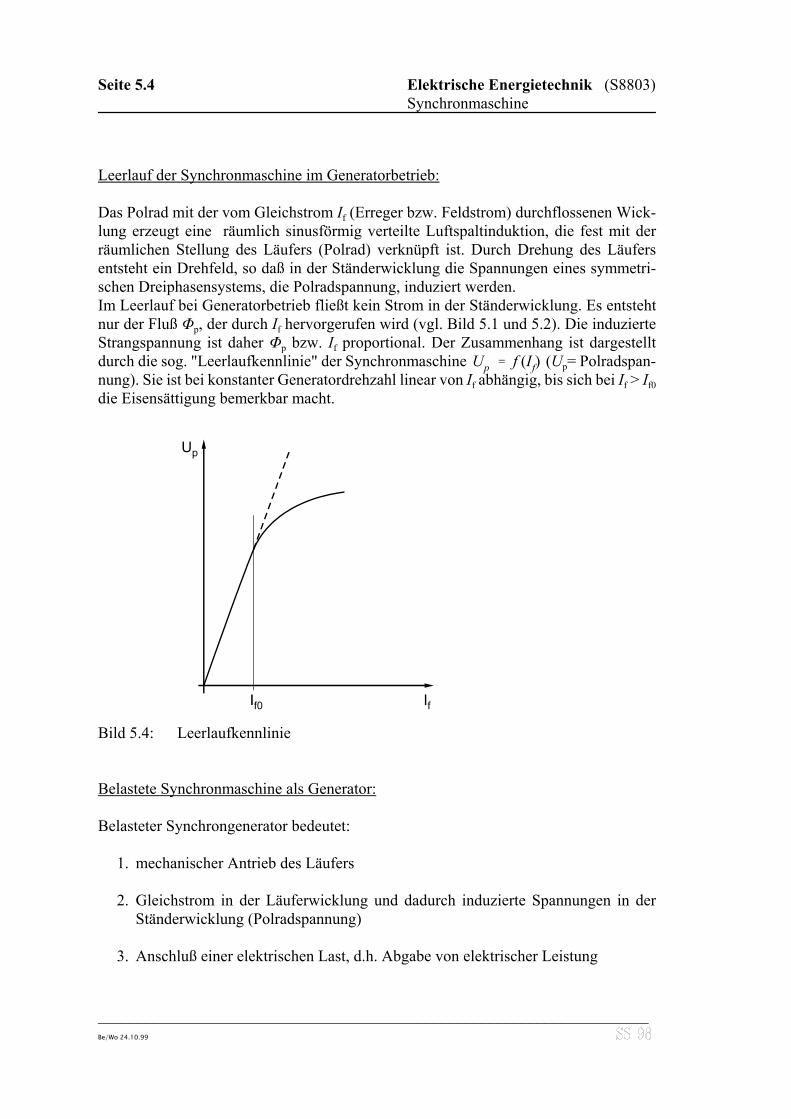
Das Polrad mit der vom Gleichstrom If (Erreger bzw. Feldstrom) durchflossenen Wick-lung erzeugt eine räumlich sinusförmig verteilte Luftspaltinduktion, die fest mit derräumlichen Stellung des Läufers (Polrad) verknüpft ist. Durch Drehung des Läufersentsteht ein Drehfeld, so daß in der Ständerwicklung die Spannungen eines symmetri-schen Dreiphasensystems, die Polradspannung, induziert werden.Im Leerlauf bei Generatorbetrieb fließt kein Strom in der Ständerwicklung. Es entstehtnur der Fluß Φp, der durch If hervorgerufen wird (vgl. Bild 5.1 und 5.2). Die induzierteStrangspannung ist daher Φp bzw. If proportional. Der Zusammenhang ist dargestelltdurch die sog. "Leerlaufkennlinie" der Synchronmaschine (Up= Polradspan-Up � f (If)nung). Sie ist bei konstanter Generatordrehzahl linear von If abhängig, bis sich bei If > If0die Eisensättigung bemerkbar macht.
Bild 5.4: Leerlaufkennlinie
Belastete Synchronmaschine als Generator:
Belasteter Synchrongenerator bedeutet:
1. mechanischer Antrieb des Läufers
2. Gleichstrom in der Läuferwicklung und dadurch induzierte Spannungen in derStänderwicklung (Polradspannung)
3. Anschluß einer elektrischen Last, d.h. Abgabe von elektrischer Leistung
Elektrische Energietechnik (S8803) Seite 5.5Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
In der Drehstromwicklung des Ständers fließen Ströme eines Drehstromsystems. Sieerzeugen ebenfalls ein Drehfeld (sog. Ankerrückwirkung).Im Luftspalt der belasteten Synchronmaschine haben wir die Überlagerung zweierDrehfelder:
1. das Läuferdrehfeld Φp(durch den Gleichstrom If erzeugt)
2. das durch den Belastungsstrom I1 erzeugte Ständerfeld Φa
Das resultierende Drehfeld induziert in der Ständerwicklung (Anker) eine Spannung.
Die Polradspannung ist die vom Polrad (Läuferdrehfeld Φp) in der Ständerwicklunginduzierte Spannung. Sie kann nur bei Leerlauf (Generator: I1 = 0) an den Klemmengemessen werden. Bei Last ist sie eine reine Rechengröße. Bei Belastung (I1 =/ 0) tritt zuder Polradspannung die Ankerrückwirkung: Die Spannung, die durch den Fluß desStänderfeldes Φa in der Ständerwicklung induziert wird. Je nach Phasenlage von Ständer-strom bzw. zugehörigem Fluß kann die Gesamtspannung kleiner oder größer als diePolradspannung Up sein.
Hinweis auf den Unterschied gegenüber der Asynchronmaschine und dem Transformator:Dort erzeugt ein Belastungstrom in der Läufer- bzw. Sekundärwicklung wegen derHauptflußkonstanz einen entsprechenden Gegenstrom in der Ständer- bzw. Primärwick-lung. Dadurch bleiben die resultierenden Durchflutungen und der Hauptfluß auch bei ver-änderlichem Belastungswiderstand praktisch konstant.
Bei Synchronmaschinen gibt es keine Rückwirkung des Ständerfeldes auf das Polrad, dawegen der synchronen Drehzahl des Polrades in der Polradwicklung im stationärenZustand keine Spannung induziert wird.

Seite 5.6 Elektrische Energietechnik (S8803)Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
up � N1]dΦp(t)
dt� L1h]
die
dt(5.4)
Up� N1 ] jωΦ
p� L1h ] jωI
e (5.5)
5.2 Ersatzschaltbild und Zeigerdiagramm
Die nachfolgende Darstellung beschränkt sich auf die Vollpolmaschine, hat aber nä-herungsweise auch für die Schenkelpolmaschine Gültigkeit. Bei einer exakten Betrach-tung der Schenkelpolmaschine muß berücksichtigt werden, daß der Läufer nicht rota-tionssymmetrisch ist und daher die Feldgrößen und die Ersatzschaltbilder für dieLäuferlängs- und -querachse unterschieden werden müssen.
Eine Schwierigkeit bei der Entwicklung von Ersatzschaltbild und Zeigerdiagramm ist dieTatsache, daß in der Läuferwicklung ein Gleichstrom fließt, der im Zeigerbild nichtdarstellbar ist.
Wesentlich für das Ersatzschaltbild ist allein, daß der Läufer ein Drehfeld erzeugt. DiesesDrehfeld kann man sich auch durch eine zusätzliche Drehstromwicklung im Ständerentstanden denken, welche die gleichen Wicklungsdaten hat, wie die tatsächliche Stän-derwicklung und von einem symmetrischen Drehstrom durchflossen wird.
Wir definieren einen fiktiven Ständerstrom Ie in der zusätzlichen, fiktiven Drehstrom-wicklung, der das gleiche Drehfeld - beschrieben durch den Fluß Φp - erzeugt, wie derin der tatsächlichen Läuferwicklung fließende Gleichstrom If.
Wie bei der Asynchronmaschine entwickeln wir dann ein einphasiges Ersatzschaltbild.
Für die leerlaufende Synchronmaschine gilt:
Der Strom Ie erzeugt den Fluß Φp und dieser die Polradspannung up.

Elektrische Energietechnik (S8803) Seite 5.7Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
ua � N1 ]dΦa(t)
dt� L1h ]
di1
dt(5.6)
Ua� N1 ] jωΦ
a� L1h ] jωI
1 (5.7)
Ud� U
p� U
a (5.8)
Ud� N1 ] jωΦ
h� L1h ] jω I
µ (5.9)
Bei belasteter Synchronmaschine tritt zusätzlich ein Ständerstrom I1 auf, der ein Ständer-drehfeld erzeugt, beschrieben durch den Ankerfluß φa. φa induziert in der Ständerwick-lung die Spannung ua (Ankerrückwirkung):
Beide Flüsse Φp und Φa sind mit der gleichen Hauptinduktivität L1h verknüpft, da,entsprechend der Annahme, die fiktive und tatsächliche Ständerwicklung die gleichenWicklungsdaten haben.
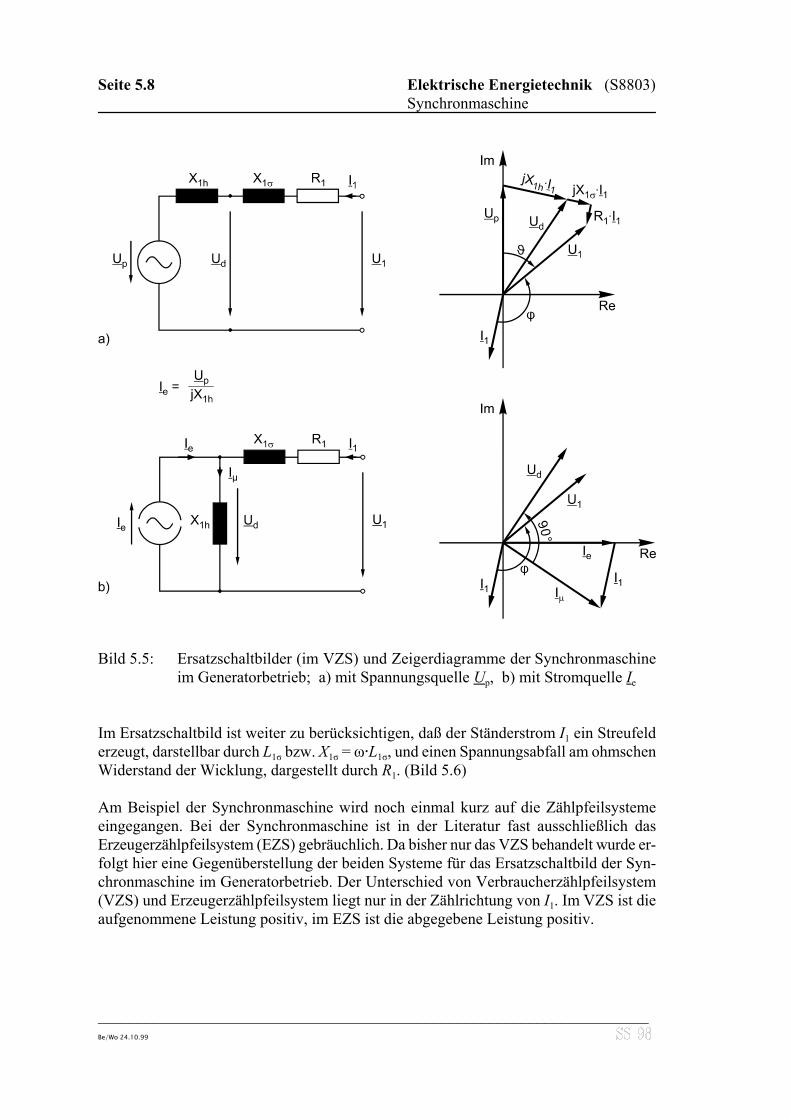
Bild 5.5 zeigt die vereinfachten Ersatzschaltbilder der Synchronmaschine für Ständer-streuung X1σ = 0 und Ständerwiderstand R1 = 0 mit Stromquelle Ie und SpannungsquelleUp.
Bei der nach dem VZS in die Ersatzschaltbilder eingetragenen Spannung U1 und demStrom I1 wäre die Leistung der Quelle positiv, d.h. sie nimmt Leistung vom Netz auf, dieMaschine arbeitet als Motor. Die Zeigerdiagramme Bild 5.5 zeigen aber einen Betriebs-zustand, in dem Spannung U1 und Strom I1 entgegengerichtet sind (Œ >90°). Die Leistungder Quelle ist also negativ, sie gibt Leistung an das Netz ab, die Maschine arbeitet alsGenerator.
Ud ist die durch das resultierende Drehfeld entstehende Spannung.
Sie ist auch darstellbar durch
Mit ; Φh� Φ
p�Φ
aI
µ� I
e� I
1
Φh ist der tatsächliche im Luftspalt vorhandene Hauptfluß. (Überlagerung der beidenDrehfelder).Iµ ist eine fiktive Größe, so wie auch Ie eine fiktive Ersatzgröße ist, die tatsächlichnirgends vorkommt.
Seite 5.8 Elektrische Energietechnik (S8803)Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
Bild 5.5: Ersatzschaltbilder (im VZS) und Zeigerdiagramme der Synchronmaschineim Generatorbetrieb; a) mit Spannungsquelle Up, b) mit Stromquelle Ie
Im Ersatzschaltbild ist weiter zu berücksichtigen, daß der Ständerstrom I1 ein Streufelderzeugt, darstellbar durch L1σ bzw. X1σ = ω]L1σ, und einen Spannungsabfall am ohmschenWiderstand der Wicklung, dargestellt durch R1. (Bild 5.6)
Am Beispiel der Synchronmaschine wird noch einmal kurz auf die Zählpfeilsystemeeingegangen. Bei der Synchronmaschine ist in der Literatur fast ausschließlich dasErzeugerzählpfeilsystem (EZS) gebräuchlich. Da bisher nur das VZS behandelt wurde er-folgt hier eine Gegenüberstellung der beiden Systeme für das Ersatzschaltbild der Syn-chronmaschine im Generatorbetrieb. Der Unterschied von Verbraucherzählpfeilsystem(VZS) und Erzeugerzählpfeilsystem liegt nur in der Zählrichtung von I1. Im VZS ist dieaufgenommene Leistung positiv, im EZS ist die abgegebene Leistung positiv.
Elektrische Energietechnik (S8803) Seite 5.9Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
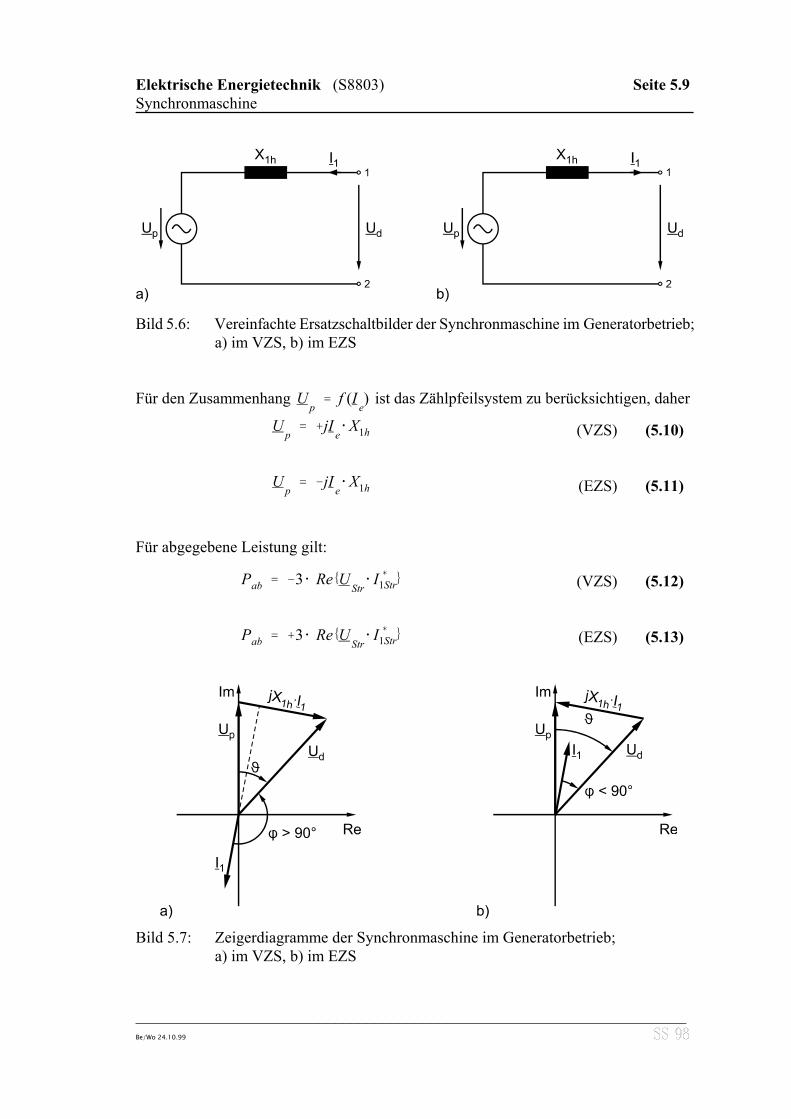
Up� �jI
e] X1h (VZS) (5.10)
Up� �jI
e] X1h (EZS) (5.11)
Pab � �3 ] Re SUStr] I �
1Str[ (VZS) (5.12)
Pab � �3 ] Re SUStr] I �
1Str[ (EZS) (5.13)
Bild 5.6: Vereinfachte Ersatzschaltbilder der Synchronmaschine im Generatorbetrieb;a) im VZS, b) im EZS
Für den Zusammenhang ist das Zählpfeilsystem zu berücksichtigen, daherUp� f (I
e)
Für abgegebene Leistung gilt:
Bild 5.7: Zeigerdiagramme der Synchronmaschine im Generatorbetrieb;a) im VZS, b) im EZS

Seite 5.10 Elektrische Energietechnik (S8803)Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
XS � X1σ� X1h (5.14)
U1� U
p� j I
1XS (5.15)
Up� jUp , I
e� Ie
Up� jUp � jX1h Ie
Winkelbetrachtung im Zeigerbild:
Œ ist der Phasenwinkel zwischen Ständerstrom I1 und Klemmenspannung U1 (von I1nach U1 gezählt).
† ist der Phasenwinkel zwischen Polradspannung Up und Klemmenspannung U1; erheißt "Polradwinkel" oder "Lastwinkel" (von Up nach U1 gezählt)
Im Leerlauf ist † = 0 (U1 = Up). Bei Belastung wächst †. Bei Generatorbetrieb eilt dasPolrad vor († negativ), bei Motorbetrieb bleibt das Polrad zurück († positiv), jeweilsgemessen am Zustand bei Leerlauf. Bei Laständerung ändert sich nur der Betrag von †,die Drehzahl bleibt konstant (synchrone Drehzahl).
5.3 Stationärer Betrieb
Für die folgende Betrachtung machen wir zwei Vereinfachungen:
1. Die Leerlaufkennlinie wird als Gerade angenommen.
2. Der ohmsche Widerstand der Ständerwicklung wird vernachlässigt.
Im Gegensatz zu Ersatzschaltbild 5.6 wird hier die Ständerstreuinduktivität X1σ berück-sichtigt. Die Zusammenfassung von X1σ und X1h führt zu
XS heißt: "synchrone Reaktanz". Damit ergibt sich das Ersatzschaltbild im VZS nachBild 5.8a.
Spannungsgleichungen
wobei sinnvoll gesetzt wird (vgl. Bild 5.8):
Elektrische Energietechnik (S8803) Seite 5.11Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
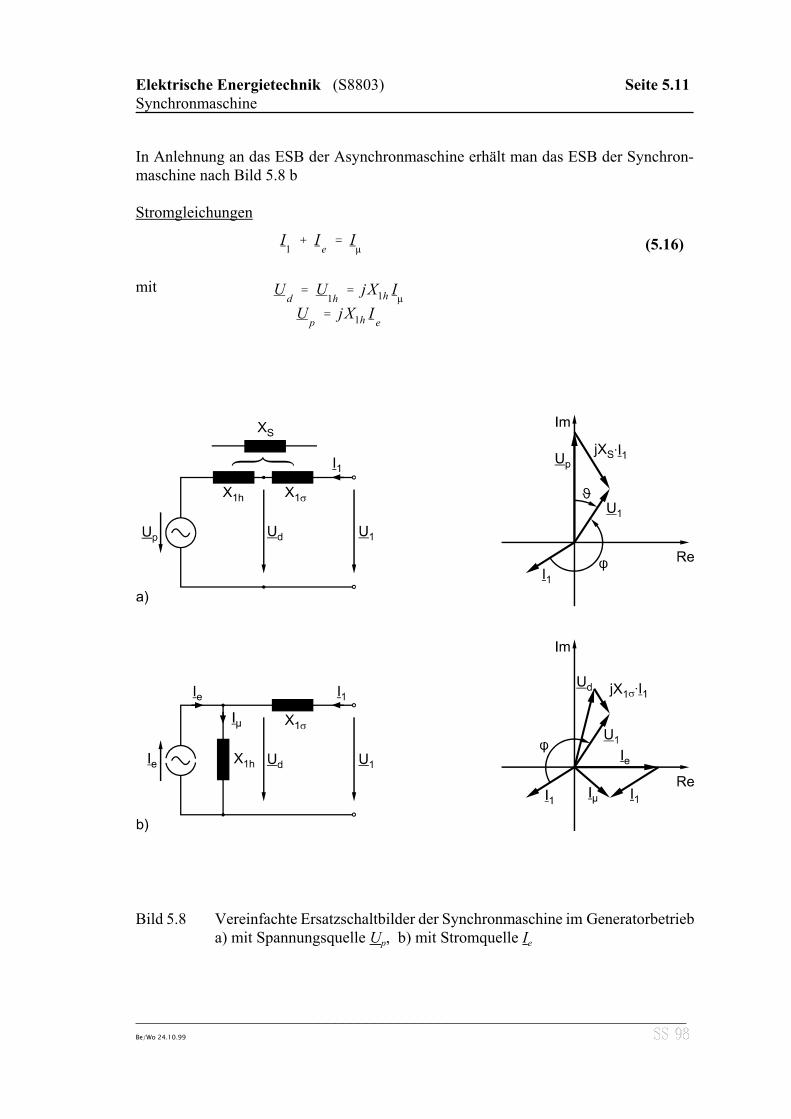
I1� I
e� I
µ (5.16)
Ud� U
1h� jX1h I
µU
p� jX1h I
e
In Anlehnung an das ESB der Asynchronmaschine erhält man das ESB der Synchron-maschine nach Bild 5.8 b
Stromgleichungen
mit
Bild 5.8 Vereinfachte Ersatzschaltbilder der Synchronmaschine im Generatorbetrieba) mit Spannungsquelle Up, b) mit Stromquelle Ie

Seite 5.12 Elektrische Energietechnik (S8803)Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
U1� Ud� jUq , U1 � U 2
d � U 2q (5.17)
I1� Id� j Iq , I1 � I 2
d � I 2q (5.18)
U1� Ud� jUq � jXS (Id� j Iq)� jUp
� jXS Id� Xd Iq� jUp(5.19)
Re SU1[ � Ud � �XS Iq � �U1 sin† (5.20)
Im SU1[ � Uq � XS Id� Up � U1 cos† (5.21)
S�
q� P1� jQ1 � 3 U
1I�
1� 3 (Ud� jUq) (Id� j Iq)
� 3[Ud Id� Uq Iq� j (Uq Id� Ud Iq)](5.22)
P1 � 3(Ud Id� Uq Iq) (5.23)
Q1 � 3(Uq Id� Ud Iq) (5.24)
Da sich beim Motor- oder Generatorbetrieb (Wirkleistungsaufnahme d.h. P > 0, † > 0,bzw. Qabgabe, P < 0, † < 0) die Zeiger der Spannungen und Ströme gegenüber denläuferfesten (d-, q)-System verdrehen, ist zur rechnerischen Behandlung eine Zerlegungder komplexen Größen in Real- und Imaginärteil von Vorteil (vgl. Zeigerbild 5.9 b). Die reelle Koordinate der Gauß´schen Zahlenebene legen wir in die Längsachse desLäufers, die imaginäre in seine Querachse. Es gelten folgende Gleichungen für die d- (längs-) und q- (quer-) Komponenten:
Im läuferfesten (d, q)-System ergeben sich durch Einsetzen dieser Gleichungen folgendeBeziehungen:
Eine Aufspaltung in Real- und Imaginärteil ergibt
Re, d- Achse:
Im, q-Achse:
Durch Einsetzen der Gleichungen (5.17) und (5.18) in die Beziehung für die komplexeScheinleistung S im VZS
folgt durch Koeffizientenvergleich für die ständerseitige Wirk- und Blindleistung im (d-, q)-System

Elektrische Energietechnik (S8803) Seite 5.13Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
P1 � 3 Ud ]U1 cos†� Up
XS
� Uq ]U1 sin†
XS
�3XS
�U 21 sin† cos†� Up U1 sin†� U 2
1 sin† cos†
� 3UpU1
XS
sin† � 3Up Ik sin†
(5.25)
Q1 � 3 Uq ]U1 cos†� Up
XS
� Ud ]U1
XS
sin†
�3XS
U 21 (cos†)2
� Up U1 cos†� U 21 (sin†)2
� 3U1
XS
[U1� Up cos†] � 3 Ik [U1� Up cos†]
(5.26)
Durch Einsetzen der Gleichung (5.20) und (5.21) folgt für die Wirkleistung:
und für die Blindleistung:
wobei mit U1/XS = IK der meßbare Kurzschlußstrom IK eingeführt werden kann.
Die Synchronmaschine kann elektrische Leistung aufnehmen (P1 > 0, Motorbetrieb) undabgeben (P1 < 0, Generatorbetrieb). Außerdem kann sie im Motor- und Generatorbetriebinduktive Blindleistung aufnehmen (Q1 > 0, untererregter Betrieb) und abgeben (Q1 < 0,übererregt).
Anhand der wichtigen Gleichungen für die Wirk- und Blindleistung (5.25) und (5.26)lassen sich die vier Betriebsquadranten in Abhängigkeit vom Polradwinkel und derPolradspannung Up = X1h Ie bzw. dem Erregerstrom Ie definieren.
Eine zweite Möglichkeit die Betriebszustände der Synchronmaschine auf einen Blick zuunterscheiden ist die Phasenlage von I1 und U1. Hierzu drehen wir unser läuferfestesKoordinatensystem, so daß die Spannung U1 in der Realachse liegt. Dies entspricht einerDrehung um den Winkel -(90° + †) (vgl. Bild 5.9). Das Koordinatensystem wird, wie beider Asynchronmaschine, zur anschaulicheren Darstellung um 90° gedreht.
Seite 5.14 Elektrische Energietechnik (S8803)Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
I1(d,q) � Id � j Iq �
U1
XS
cos† � jU1
XS
sin† �
Up
XS(5.27)
I1(d,q) �
U1
XS
e j†�
Up
XS(5.28)
I1(w,b) � �j
U1
XS
� jUp
XS
e �j† (5.29)
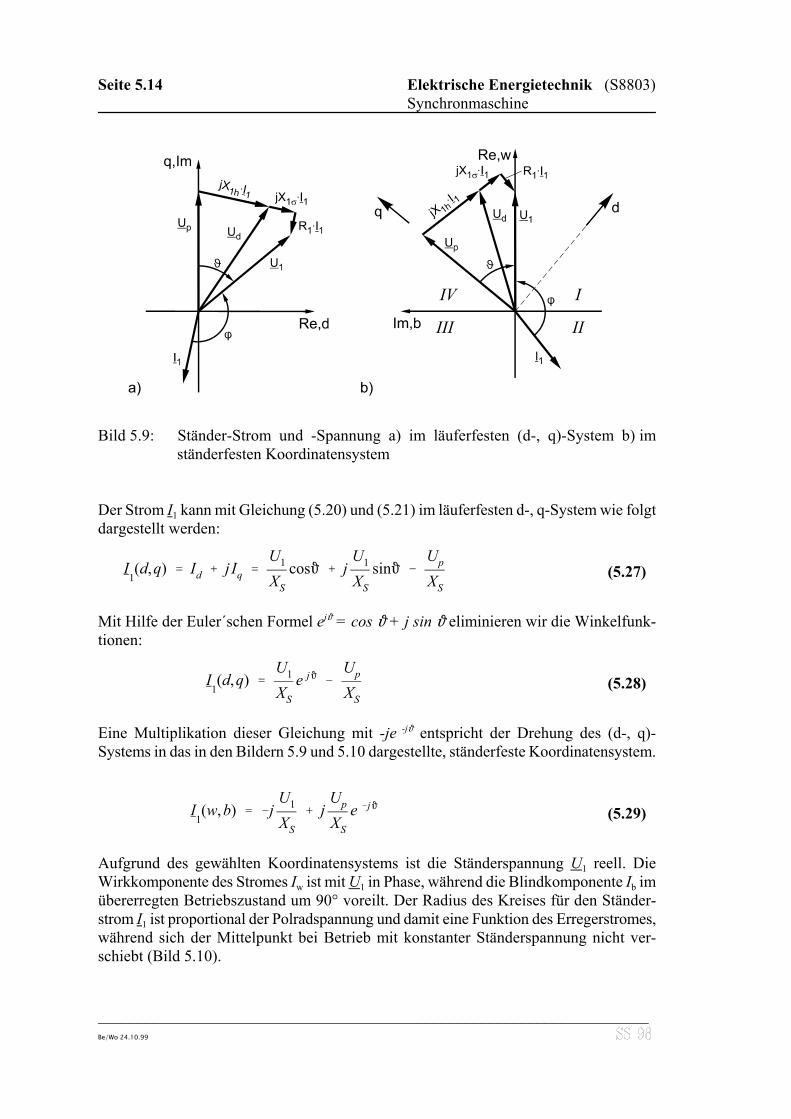
Bild 5.9: Ständer-Strom und -Spannung a) im läuferfesten (d-, q)-System b) imständerfesten Koordinatensystem
Der Strom I1 kann mit Gleichung (5.20) und (5.21) im läuferfesten d-, q-System wie folgtdargestellt werden:
Mit Hilfe der Euler´schen Formel ej† = cos † + j sin † eliminieren wir die Winkelfunk-tionen:
Eine Multiplikation dieser Gleichung mit -je -j† entspricht der Drehung des (d-, q)-Systems in das in den Bildern 5.9 und 5.10 dargestellte, ständerfeste Koordinatensystem.
Aufgrund des gewählten Koordinatensystems ist die Ständerspannung U1 reell. DieWirkkomponente des Stromes Iw ist mit U1 in Phase, während die Blindkomponente Ib imübererregten Betriebszustand um 90° voreilt. Der Radius des Kreises für den Ständer-strom I1 ist proportional der Polradspannung und damit eine Funktion des Erregerstromes,während sich der Mittelpunkt bei Betrieb mit konstanter Ständerspannung nicht ver-schiebt (Bild 5.10).
Elektrische Energietechnik (S8803) Seite 5.15Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
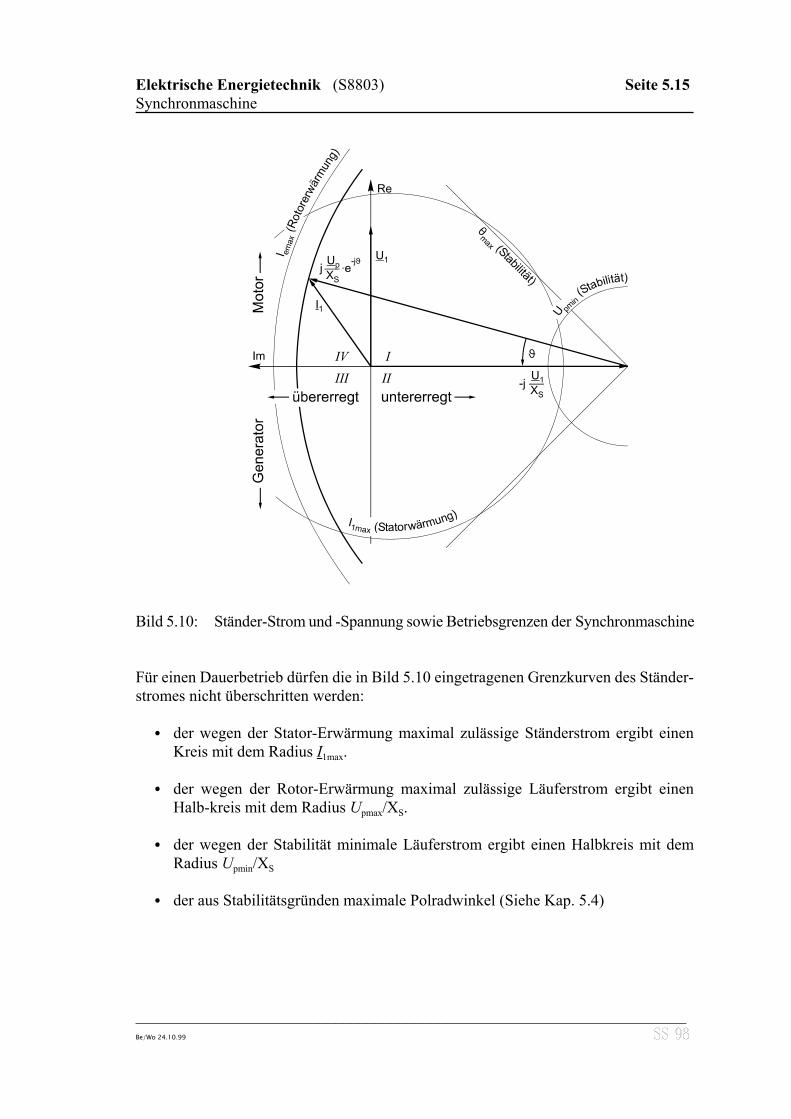
Bild 5.10: Ständer-Strom und -Spannung sowie Betriebsgrenzen der Synchronmaschine
Für einen Dauerbetrieb dürfen die in Bild 5.10 eingetragenen Grenzkurven des Ständer-stromes nicht überschritten werden:
` der wegen der Stator-Erwärmung maximal zulässige Ständerstrom ergibt einenKreis mit dem Radius I1max.
` der wegen der Rotor-Erwärmung maximal zulässige Läuferstrom ergibt einenHalb-kreis mit dem Radius Upmax/XS.
` der wegen der Stabilität minimale Läuferstrom ergibt einen Halbkreis mit demRadius Upmin/XS
` der aus Stabilitätsgründen maximale Polradwinkel (Siehe Kap. 5.4)
Seite 5.16 Elektrische Energietechnik (S8803)Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
U1
Up
A cos† (5.30)
Den folgenden Zeigerdiagrammen der vier Betriebsquadranten liegt das Ersatzschaltbildnach Bild 5.5 a zugrunde. Es werden jetzt Ständerstreuspannungsabfälle, sowie die Wick-lungsverluste abgebildet. Die Definition der Quadranten bezieht sich auf Bild 5.10 bzw.Bild 5.15.
I. Quadrant: P1 A 0, Q1 A 0
In diesem Quadranten beträgt der Polradwinkel † nach Gleichung (5.25) theoretisch0 @ † @ π. Wie eine Betrachtung in Kapitel 5.5 noch zeigen wird, ist ein Betrieb beiπ/2 @ † @ π aber nicht stabil, so daß aus praktischen Erwägungen † auf das Intervall0 @ † @ π/2 beschränkt wird.Für Q1 A 0 folgt dann aus Gleichung (5.26) die Bedingung für diese Betriebsart:
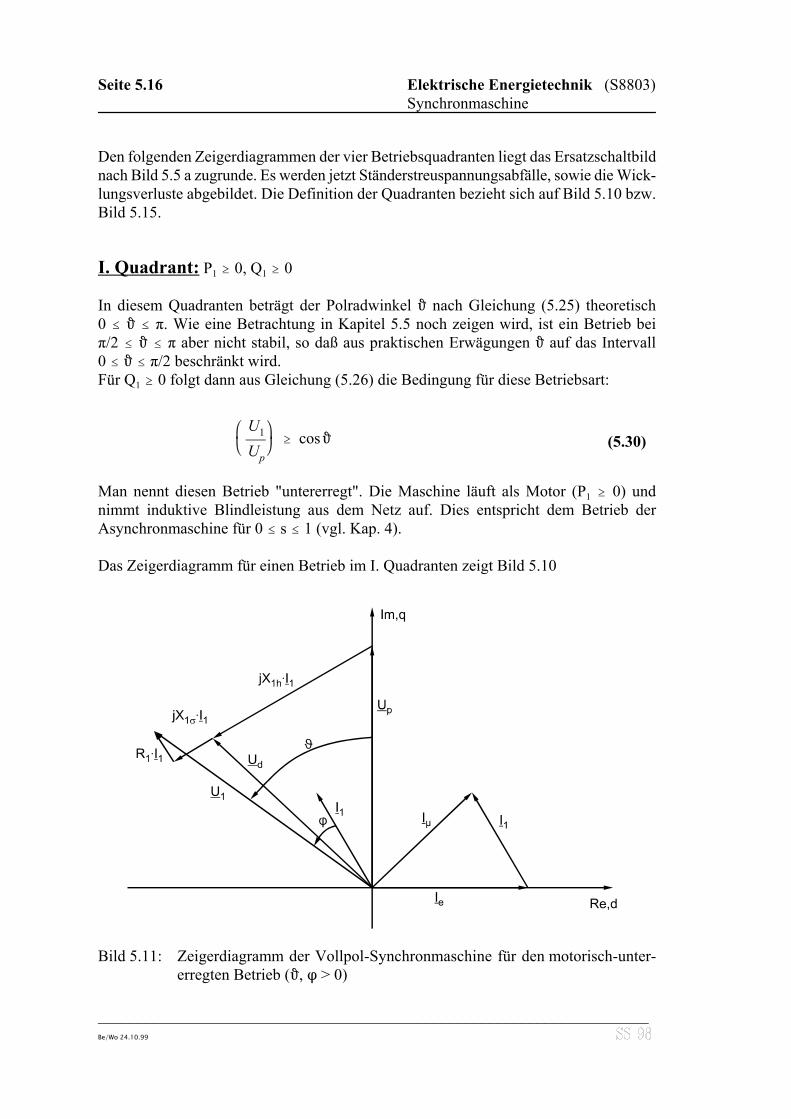
Man nennt diesen Betrieb "untererregt". Die Maschine läuft als Motor (P1 A 0) undnimmt induktive Blindleistung aus dem Netz auf. Dies entspricht dem Betrieb derAsynchronmaschine für 0 @ s @ 1 (vgl. Kap. 4).
Das Zeigerdiagramm für einen Betrieb im I. Quadranten zeigt Bild 5.10
Bild 5.11: Zeigerdiagramm der Vollpol-Synchronmaschine für den motorisch-unter-erregten Betrieb (†, Œ > 0)

Elektrische Energietechnik (S8803) Seite 5.17Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
Q1 � 0 � 3U1
XS
2
1�Up
U1
cos†
v Up � X1h Ie �
U1
cos†
(5.31)
II. Quadrant: P1 @ 0, Q1 A 0
In diesem Quadranten beträgt der Polradwinkel nach Gleichung (5.25) theoretischQπ @ † @ 0, praktisch ist aber wieder nur das Intervall Qπ/2 @ † @ 0 von Interesse. DieSpannung Up eilt also gegenüber U1 um † vor († wird von Up aus gezählt). Da Up mit der Polradstellung fest verknüpft ist, heißt ein Voreilen der Polradspannung Upgegenüber der Ständerspannung U1, daß auch die entsprechenden magnetischen Ver-kettungsflüsse Ψ1, Ψp um den Winkel † zeitlich verschoben sind. Aus der Vorstellungwird klar, daß der Läufer bzw. das Polrad angetrieben werden muß, damit Ψp gegenüberΨ1 voreilt, d.h. man könnte sich den Ständerverkettungsfluß Ψ1 an einer "magnetischenFeder" mit dem "Federweg" † vom Polradverkettungsfluß Ψp "gezogen" vorstellen.Wegen dieser möglichen physikalischen Interpretation des Polradwinkels † hat dieser fürdas Verständnis der Betriebszustände von Synchronmaschinen eine zentrale Bedeutung.Wird der untererregte Betrieb vorausgesetzt, gilt wie bei der Asynchronmaschine Q1 > 0.Zu beachten ist allerdings eine Besonderheit der Synchronmaschine. Bei vorgegebenenPolrad- oder Lastwinkel † kann Q1 auch zu Null eingestellt werden (cos Œ = 1). NachGleichung (5.26) gilt für diesen Fall
Ein beispielhaftes Zeigerdiagramm für den erläuterten Betriebszustand im II. Quadrantenzeigt Bild 5.12
Bild 5.12: Zeigerdiagramm der Vollpol- Synchronmaschine für den generatorisch-untererregten Betrieb († < 0, Œ >0)
Seite 5.18 Elektrische Energietechnik (S8803)Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
Q1 � 3U 2
1
XS
1�Up
U1
cos† @ 0 (5.32)
U1
Up
@ cos† (5.33)
III. Quadrant: P1 @ 0, Q1 @ 0
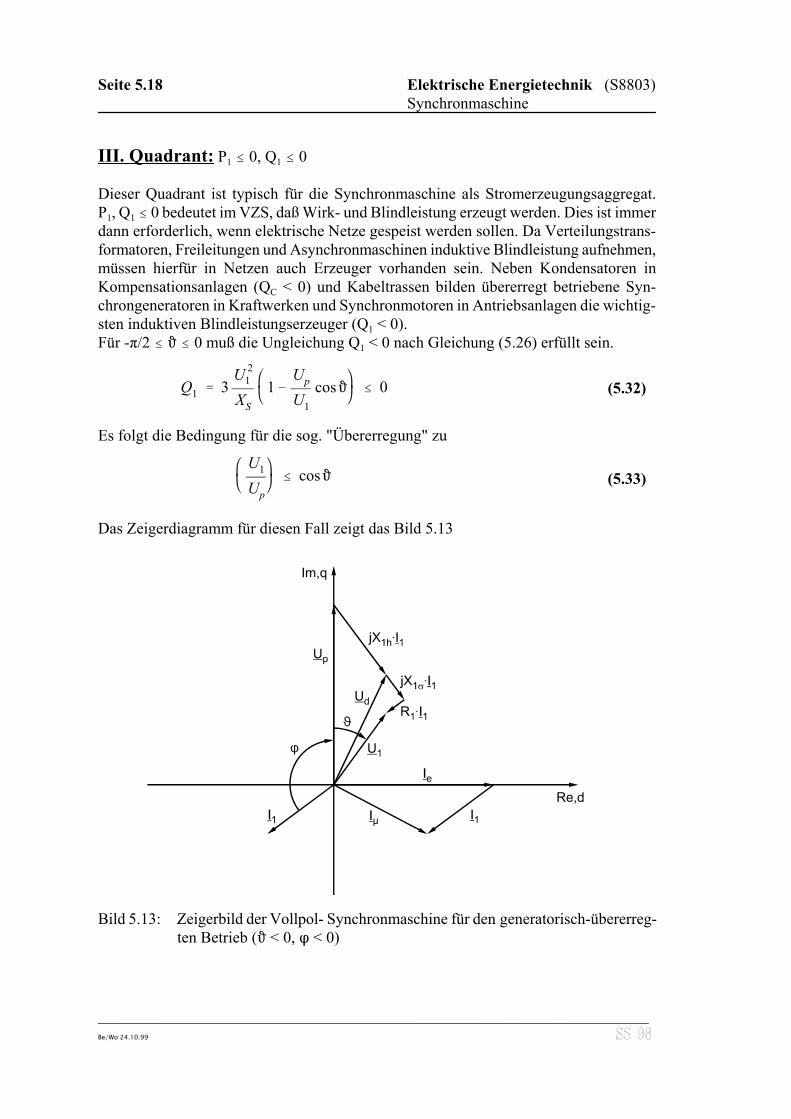
Dieser Quadrant ist typisch für die Synchronmaschine als Stromerzeugungsaggregat.P1, Q1 @ 0 bedeutet im VZS, daß Wirk- und Blindleistung erzeugt werden. Dies ist immerdann erforderlich, wenn elektrische Netze gespeist werden sollen. Da Verteilungstrans-formatoren, Freileitungen und Asynchronmaschinen induktive Blindleistung aufnehmen,müssen hierfür in Netzen auch Erzeuger vorhanden sein. Neben Kondensatoren inKompensationsanlagen (QC < 0) und Kabeltrassen bilden übererregt betriebene Syn-chrongeneratoren in Kraftwerken und Synchronmotoren in Antriebsanlagen die wichtig-sten induktiven Blindleistungserzeuger (Q1 < 0).Für -π/2 @ † @ 0 muß die Ungleichung Q1 < 0 nach Gleichung (5.26) erfüllt sein.
Es folgt die Bedingung für die sog. "Übererregung" zu
Das Zeigerdiagramm für diesen Fall zeigt das Bild 5.13
Bild 5.13: Zeigerbild der Vollpol- Synchronmaschine für den generatorisch-übererreg-ten Betrieb († < 0, Œ < 0)
Elektrische Energietechnik (S8803) Seite 5.19Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
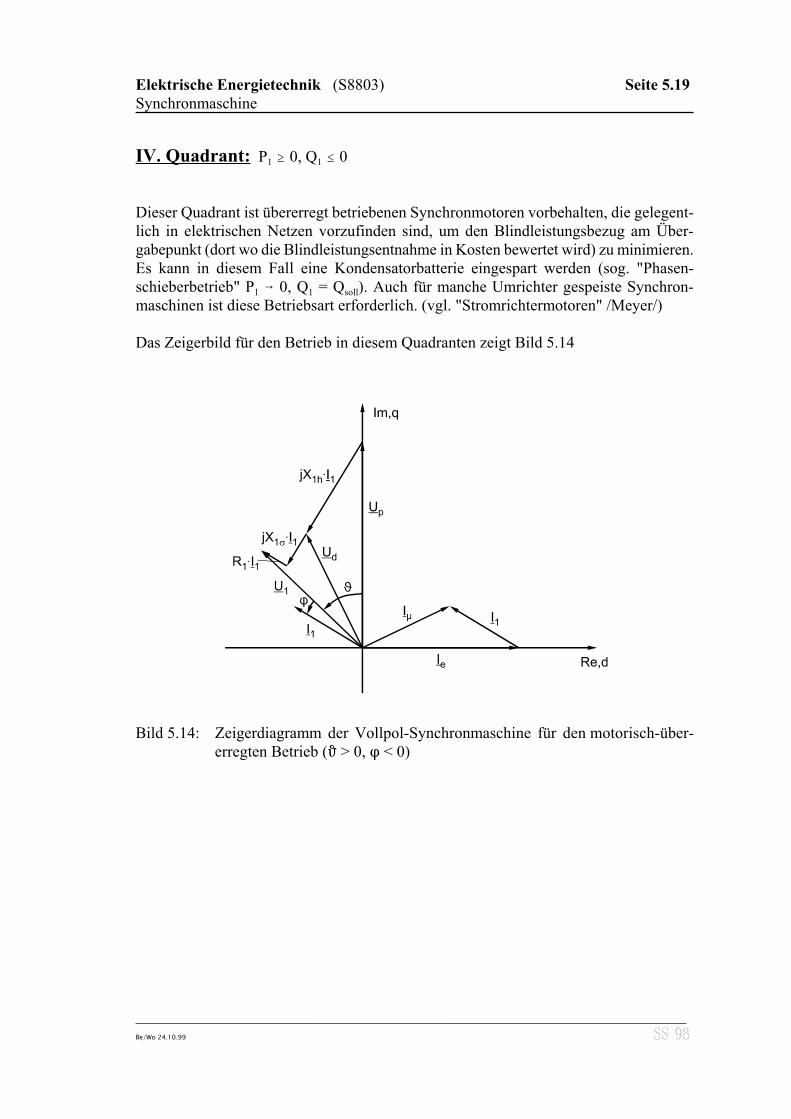
IV. Quadrant: P1 A 0, Q1 @ 0
Dieser Quadrant ist übererregt betriebenen Synchronmotoren vorbehalten, die gelegent-lich in elektrischen Netzen vorzufinden sind, um den Blindleistungsbezug am Über-gabepunkt (dort wo die Blindleistungsentnahme in Kosten bewertet wird) zu minimieren.Es kann in diesem Fall eine Kondensatorbatterie eingespart werden (sog. "Phasen-schieberbetrieb" P1 S 0, Q1 = Qsoll). Auch für manche Umrichter gespeiste Synchron-maschinen ist diese Betriebsart erforderlich. (vgl. "Stromrichtermotoren" /Meyer/)
Das Zeigerbild für den Betrieb in diesem Quadranten zeigt Bild 5.14
Bild 5.14: Zeigerdiagramm der Vollpol-Synchronmaschine für den motorisch-über-erregten Betrieb († > 0, Œ < 0)
Seite 5.20 Elektrische Energietechnik (S8803)Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
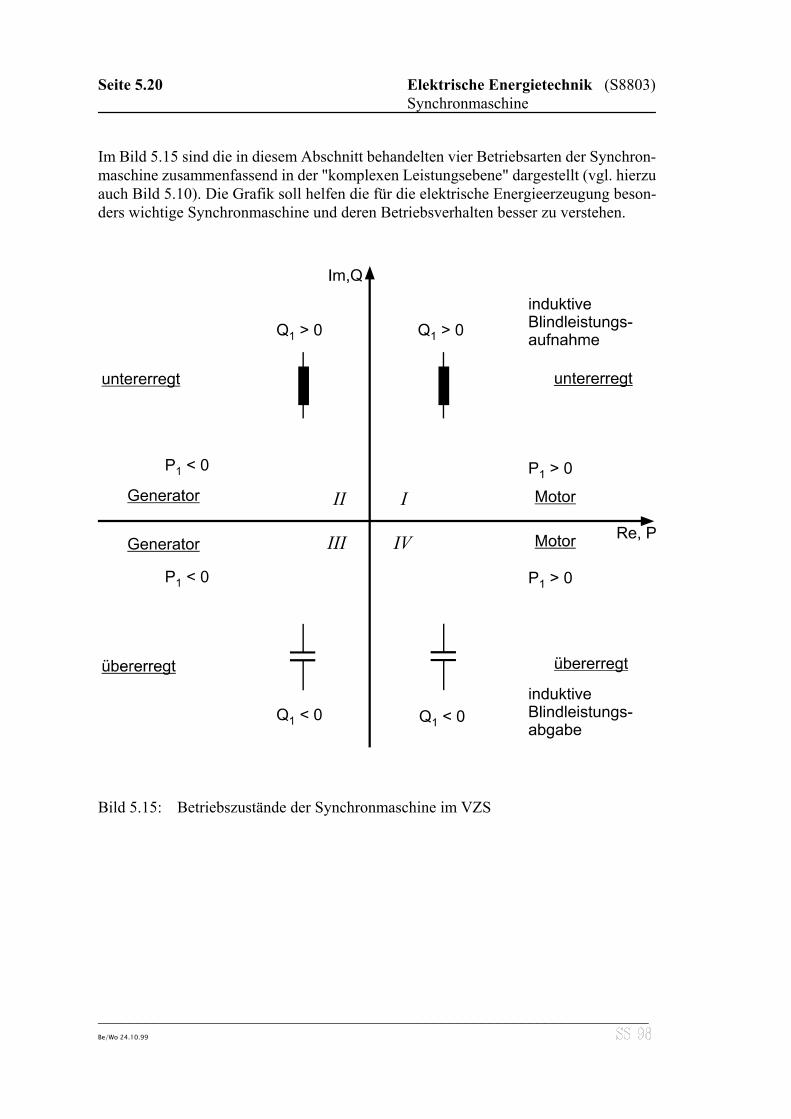
Im Bild 5.15 sind die in diesem Abschnitt behandelten vier Betriebsarten der Synchron-maschine zusammenfassend in der "komplexen Leistungsebene" dargestellt (vgl. hierzuauch Bild 5.10). Die Grafik soll helfen die für die elektrische Energieerzeugung beson-ders wichtige Synchronmaschine und deren Betriebsverhalten besser zu verstehen.
Bild 5.15: Betriebszustände der Synchronmaschine im VZS

Elektrische Energietechnik (S8803) Seite 5.21Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
Pm � 2πn1] Mi � 2πnd ] Mi (5.34)
Mi �Pm
2πn1
� 3 ]U1 ] Up
2πn1 ] Xd
] sin† (5.35)
Mi � MK ] sin† (5.36)
Mk �
3]U1]Up
2πn1]Xd(5.37)
5.4 Leistung und Drehmoment
Die im Ständer umgesetzte Drehstromleistung deckt Ständerverluste (Kupfer- und Eisen-verluste) und Ständerdrehfeldleistung (über den Luftspalt übertragene Leistung). DerLäufergleichstrom bedingt die Läuferverluste. Ansonsten trägt er zur Magnetisierung derMaschine bei, ist also als "Blindstrom" zu werten und kann hier außer Betracht gelassenwerden. Vernachlässigt man Ständer- und Läuferverluste, so ist die aufgenommene elek-trische Leistung gleich der mechanischen Leistung. (s = 0)
Damit erhält man mit Gleichung (5.25) für das innere Moment Mi mit P1 = Pm(Annahme η = 1)
Damit ist das Moment als Funktion des Polradwinkels für konstante Werte für Strom undSpannung über das Kippmoment darstellbar:
Für G†G = wird das maximale Moment, das gleich dem Kippmoment Mk ist, erreichtπ2
Entsprechend dem VZS gilt:
Mi < 0 S GeneratorbetriebMi > 0 S Motorbetrieb
Mi ist vom Polradwinkel abhängig, nicht von der Drehzahl n1, die ja durch die Frequenzdes angeschlossenen Drehstromsystems vorgegeben ist.(Synchrondrehzahl n1 = nd = f1/p)
Seite 5.22 Elektrische Energietechnik (S8803)Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
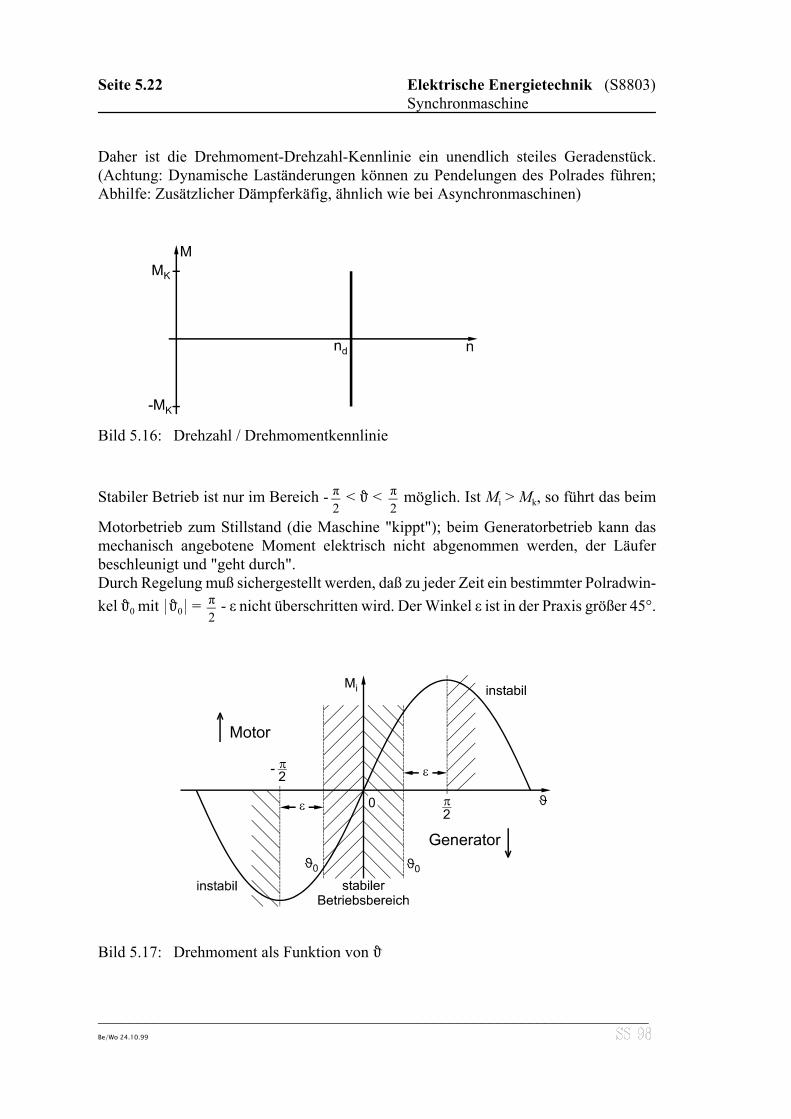
Daher ist die Drehmoment-Drehzahl-Kennlinie ein unendlich steiles Geradenstück.(Achtung: Dynamische Laständerungen können zu Pendelungen des Polrades führen;Abhilfe: Zusätzlicher Dämpferkäfig, ähnlich wie bei Asynchronmaschinen)
Bild 5.16: Drehzahl / Drehmomentkennlinie
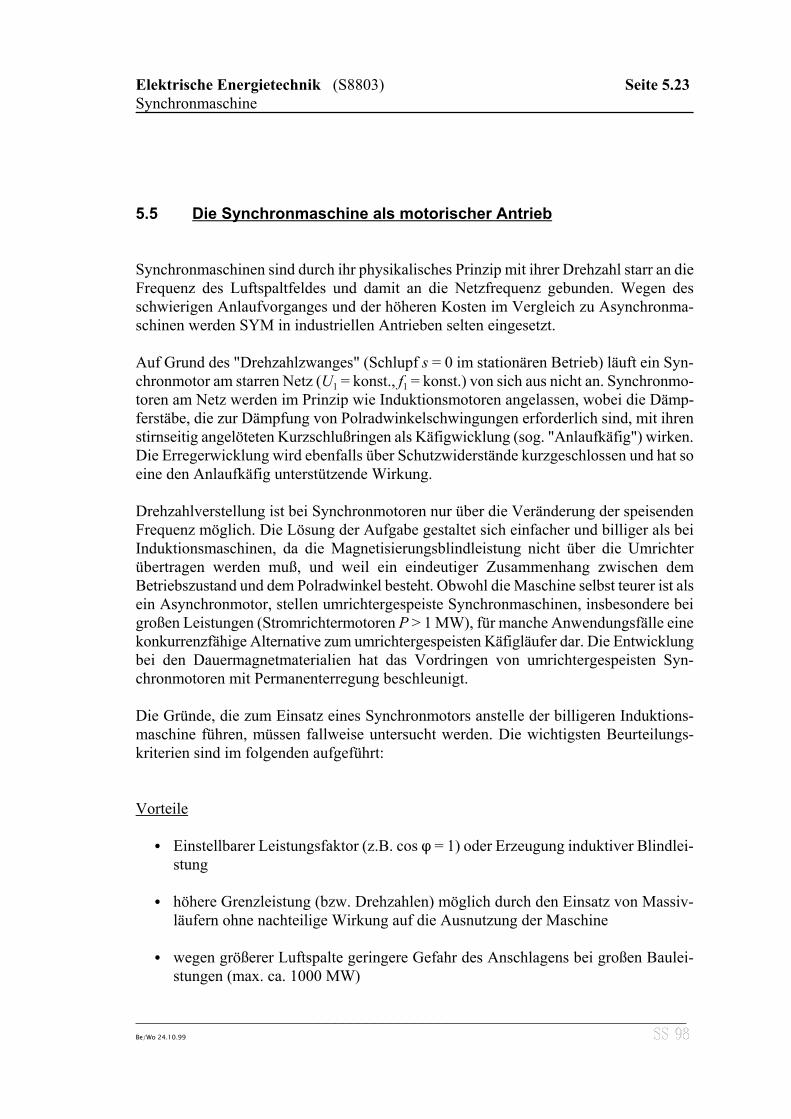
Stabiler Betrieb ist nur im Bereich - < † < möglich. Ist Mi > Mk, so führt das beimπ2
π2
Motorbetrieb zum Stillstand (die Maschine "kippt"); beim Generatorbetrieb kann dasmechanisch angebotene Moment elektrisch nicht abgenommen werden, der Läuferbeschleunigt und "geht durch".Durch Regelung muß sichergestellt werden, daß zu jeder Zeit ein bestimmter Polradwin-kel †0 mit G†0G = - ε nicht überschritten wird. Der Winkel ε ist in der Praxis größer 45°.π
2
Bild 5.17: Drehmoment als Funktion von †
Elektrische Energietechnik (S8803) Seite 5.23Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
5.5 Die Synchronmaschine als motorischer Antrieb
Synchronmaschinen sind durch ihr physikalisches Prinzip mit ihrer Drehzahl starr an dieFrequenz des Luftspaltfeldes und damit an die Netzfrequenz gebunden. Wegen desschwierigen Anlaufvorganges und der höheren Kosten im Vergleich zu Asynchronma-schinen werden SYM in industriellen Antrieben selten eingesetzt.
Auf Grund des "Drehzahlzwanges" (Schlupf s = 0 im stationären Betrieb) läuft ein Syn-chronmotor am starren Netz (U1 = konst., f1 = konst.) von sich aus nicht an. Synchronmo-toren am Netz werden im Prinzip wie Induktionsmotoren angelassen, wobei die Dämp-ferstäbe, die zur Dämpfung von Polradwinkelschwingungen erforderlich sind, mit ihrenstirnseitig angelöteten Kurzschlußringen als Käfigwicklung (sog. "Anlaufkäfig") wirken.Die Erregerwicklung wird ebenfalls über Schutzwiderstände kurzgeschlossen und hat soeine den Anlaufkäfig unterstützende Wirkung.
Drehzahlverstellung ist bei Synchronmotoren nur über die Veränderung der speisendenFrequenz möglich. Die Lösung der Aufgabe gestaltet sich einfacher und billiger als beiInduktionsmaschinen, da die Magnetisierungsblindleistung nicht über die Umrichterübertragen werden muß, und weil ein eindeutiger Zusammenhang zwischen demBetriebszustand und dem Polradwinkel besteht. Obwohl die Maschine selbst teurer ist alsein Asynchronmotor, stellen umrichtergespeiste Synchronmaschinen, insbesondere beigroßen Leistungen (Stromrichtermotoren P > 1 MW), für manche Anwendungsfälle einekonkurrenzfähige Alternative zum umrichtergespeisten Käfigläufer dar. Die Entwicklungbei den Dauermagnetmaterialien hat das Vordringen von umrichtergespeisten Syn-chronmotoren mit Permanenterregung beschleunigt.
Die Gründe, die zum Einsatz eines Synchronmotors anstelle der billigeren Induktions-maschine führen, müssen fallweise untersucht werden. Die wichtigsten Beurteilungs-kriterien sind im folgenden aufgeführt:
Vorteile
` Einstellbarer Leistungsfaktor (z.B. cos Π= 1) oder Erzeugung induktiver Blindlei-stung
` höhere Grenzleistung (bzw. Drehzahlen) möglich durch den Einsatz von Massiv-läufern ohne nachteilige Wirkung auf die Ausnutzung der Maschine
` wegen größerer Luftspalte geringere Gefahr des Anschlagens bei großen Baulei-stungen (max. ca. 1000 MW)
Seite 5.24 Elektrische Energietechnik (S8803)Synchronmaschine
_____________________________________________________________________Be/Wo 24.10.99
` wegen des größeren Luftspaltes geringere Gefährdung durch magnetisch erzeugtenLärm
` kleinere Empfindlichkeit gegenüber Schwankungen der Netzspannung(SYM: Mkipp ~ U1, Induktionsmaschine: Mkipp ~ U1
2)
` Bemessung der Anlaufwicklung hat keinen Einfluß auf Betriebsverhalten beiNennlast
` bei Massivpolläufern größere Wärmekapazität im Läufer
` einfache Stromrichterschaltung und Steuerungselektronik bei Umrichterspeisung(Stromrichtermotor)
Nachteile
` höhere Anschaffungskosten
` wegen des komplizierteren Aufbaus (Erregerwicklung) störanfälliger und erhöhterWartungsaufwand bei Motoren mit Schleifringen
` Drehmomentsättel und Pendelmomente beim Hochlauf können Anlauf- undSchwingungsprobleme auslösen

Elektrische Energietechnik (S8803)Literaturverzeichnis
Literatur
[1] Ann / Gölz / Gross / Haase u.a.: Elektrische EnergietechnikHrsg.: T. Bohn, Verlag TÜV Rheinland
Übersichtliche, leicht lesbare Einführung
[2] Lämmerhirdt Erich-Herbert: Elektrische Maschinen und AntriebeCarl-Hanser Verlag, München, Wien
Empfehlenswerte, leicht lesbare Einführung
[3] Hosemann, G / Boeck, W.: Grundlagen der elektrischen EnergietechnikSpringer - Verlag Berlin Heidelberg
Empfehlenswerte Einführung in die wissenschaftlichen Grundlagen
[4] Böhm, Werner: Elektrische AntriebeVogel-Verlag 1989 Kamprath-Reihe: Technik
Übersichtliche Darstellung des gesamten Gebiets der elektrischen Antriebe
[5] Eckhardt, Hanskarl: Grundzüge der elektrischen MaschinenTeubner Studienbücher Elektrotechnik/Maschinenbau
Vertiefte mathematische Darstellung der elektrischen Maschinen(Grundlage der Vorlesung)
[6] Hütte - Taschenbücher der Technik: Elektrische Energietechnik (Band 1, 2, 3)Springer - Verlag Berlin Heidelberg New York
Vertiefte Darstellung aus der Sicht des Elektromaschinenbaus (Bd. 1), derLeistungselektronik (Bd. 2) und der elektrischen Energieverteilung (Bd.3)
[7] Meyer, Manfred: Elektrische Antriebstechnik (Band 1, 2)Springer - Verlag Berlin Heidelberg New York Tokyo
Umfassende Darstellung des Standes der Technik aus wissenschaftlicherSicht
[8] Nelles, B., Tuttas, CH: Elektrische EnergietechnikTeubner Verlag, Stuttgart, 1998
Gutes Begleitbuch zur Vorlesung mit weiteren Vertiefungen
IEE - Skripten onlineS8803Arnuphap Dowrueng24.10.1999
I E Enstitut für lektrische nergietechnik
IEE
Deckblatt und Inhaltverzeichnis
Kapitel 1
Kapitel 2
Kapitel 3
Kapitel 4
Kapitel 4
Kapitel 5 und Literatur
Seite 1 bis 10
Seite 11 bis 46
S8803 Elektrische Energietechnik