4.1 das bestimmte integral - algebra.tuwien.ac.at · grenzkosten k(x) = 2x − 3 x und fixkosten k0...
TRANSCRIPT
4.1 Das bestimmte Integral 51
4. Integralrechnung
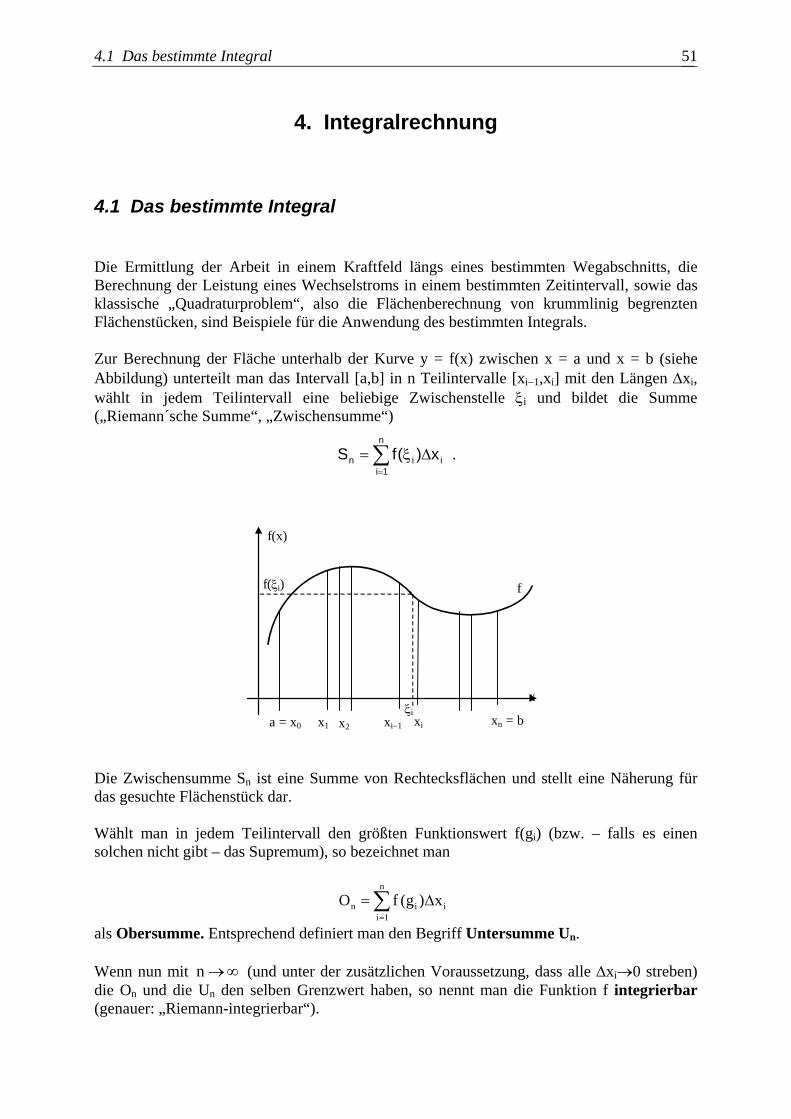
4.1 Das bestimmte Integral Die Ermittlung der Arbeit in einem Kraftfeld längs eines bestimmten Wegabschnitts, die Berechnung der Leistung eines Wechselstroms in einem bestimmten Zeitintervall, sowie das klassische „Quadraturproblem“, also die Flächenberechnung von krummlinig begrenzten Flächenstücken, sind Beispiele für die Anwendung des bestimmten Integrals. Zur Berechnung der Fläche unterhalb der Kurve y = f(x) zwischen x = a und x = b (siehe Abbildung) unterteilt man das Intervall [a,b] in n Teilintervalle [xi−1,xi] mit den Längen Δxi, wählt in jedem Teilintervall eine beliebige Zwischenstelle ξi und bildet die Summe („Riemann´sche Summe“, „Zwischensumme“)
. ∑=
Δξ=n
1iiin x)(fS
x1
f
x
f(x)
ξia = x0 xn = bx2 xixi−1
f(ξi)
Die Zwischensumme Sn ist eine Summe von Rechtecksflächen und stellt eine Näherung für das gesuchte Flächenstück dar. Wählt man in jedem Teilintervall den größten Funktionswert f(gi) (bzw. – falls es einen solchen nicht gibt – das Supremum), so bezeichnet man
als Obersumme. Entsprechend definiert man den Begriff Untersumme Un.
n
n ii 1
O f (g )=
ix= Δ∑
Wenn nun mit (und unter der zusätzlichen Voraussetzung, dass alle Δxn →∞ i→0 streben) die On und die Un den selben Grenzwert haben, so nennt man die Funktion f integrierbar (genauer: „Riemann-integrierbar“).
4.1 Das bestimmte Integral 52
Ein Beispiel einer nicht Riemann-integrierbaren Funktion ist etwa:
2
:[0;1]1 \
wenn xf x
wenn x∈⎧
→ ⎨ ∈⎩
QR
R Q
Ist f integrierbar, so konvergieren auch – unabhängig von der Wahl der Zerlegung des Intervalls [a,b] in Teilintervalle und unabhängig von der Wahl der Zwischenstellen ξi – alle Zwischensummen gegen diesen Grenzwert der On bzw. Un; dieser heißt das bestimmte Integral von f auf [a,b]:
Definition: ∫=∞→
b
ann
dx)x(fSlim
Für das bestimmte Integral gelten folgende Rechenregeln:
1. Ist f stetig auf [a,b], dann existiert das bestimmte Integral ∫abf(x)dx.
2. ∫abf(x)dx = −∫baf(x)dx, falls a > b und ∫aaf(x)dx = 0
3. ∫abf(x)dx = ∫acf(x)dx + ∫cbf(x)dx, falls a ≤ c ≤ b
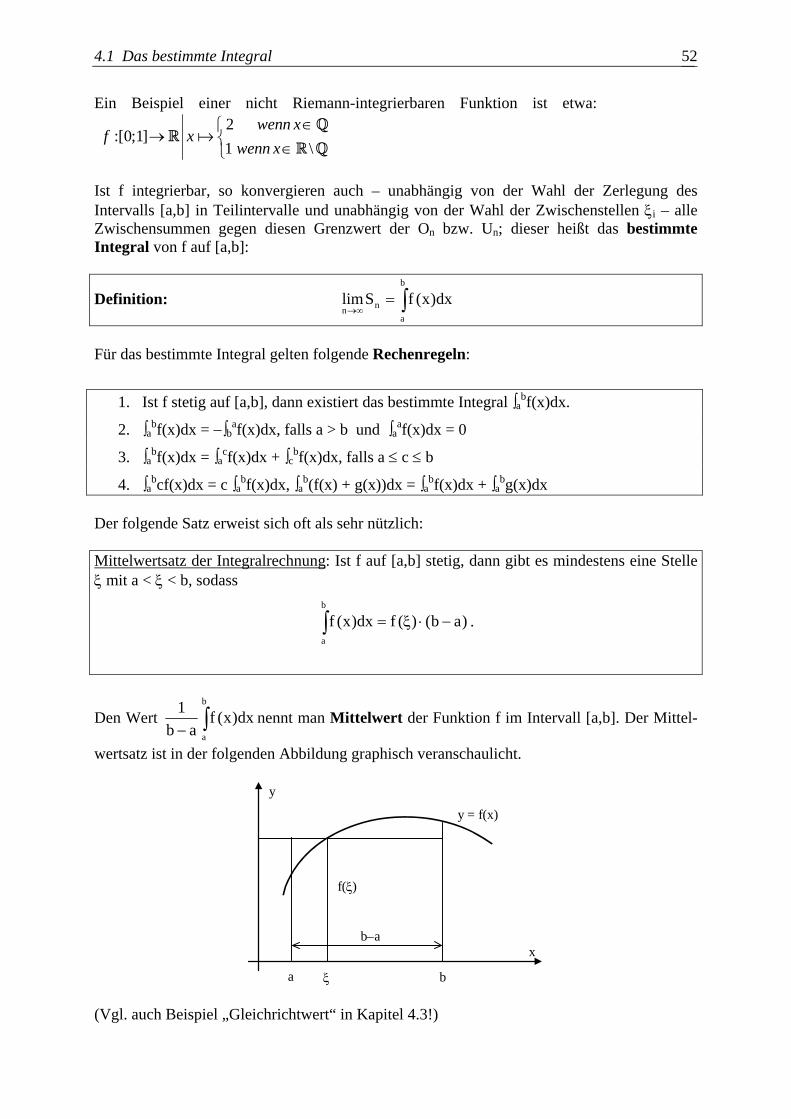
4. ∫abcf(x)dx = c ∫abf(x)dx, ∫ab(f(x) + g(x))dx = ∫abf(x)dx + ∫abg(x)dx Der folgende Satz erweist sich oft als sehr nützlich: Mittelwertsatz der Integralrechnung: Ist f auf [a,b] stetig, dann gibt es mindestens eine Stelle ξ mit a < ξ < b, sodass
. )ab()(fdx)x(fb
a
−⋅ξ=∫
Den Wert ∫−
b
a
dx)x(fab
1 nennt man Mittelwert der Funktion f im Intervall [a,b]. Der Mittel-
wertsatz ist in der folgenden Abbildung graphisch veranschaulicht.
f(ξ)
y = f(x)
x
y
ξa b
b−a
(Vgl. auch Beispiel „Gleichrichtwert“ in Kapitel 4.3!)
4.2 Stammfunktionen (unbestimmtes Integral) 53
4.2 Stammfunktionen (unbestimmtes Integral) Beispiel: Die Geschwindigkeit bei gleichmäßig beschleunigter Bewegung (mit konstanter Beschleunigung a) ist gegeben durch v(t) = at. Wie groß ist der Weg s(t) zur Zeit t? Gesucht ist in diesem Beispiel eine Funktion s(t) mit s´(t) = v(t), also etwa s(t) = (a/2) t2. Genauso erfüllt aber auch s(t) = (a/2) t2 + s0 mit s0 ∈ — die angegebene Bedingung. Definition: Sei f: I → — (I = Intervall ⊆ —). Jede Funktion F: I → — mit F′(x) = f(x) für alle x ∈ I heißt Stammfunktion oder ein unbestimmtes Integral von f. Ist F eine Stammfunktion von f, so ist auch folgende Schreibweise gebräuchlich:
∫∫ == dx)x(f)x(F.bzwfF Ist F eine Stammfunktion von f, so ist auch F+C für jedes C∈— eine Stammfunktion von f. C nennt man auch Integrationskonstante. Falls die Definitionsmenge von f ein Intervall I ist, so sind dies bereits alle Stammfunktionen. D.h., sind F1 und F2 Stammfunktionen, so muss es eine Konstante C∈— geben, so dass F2=F1+C ist. Man kennt also alle Stammfunktionen einer auf I definierten Funktion f, wenn bereits eine Stammfunktion F von f bekannt ist. Differenzieren und Integrieren, d.h. das Aufsuchen von Stammfunktionen, sind zueinander invers:
∫ ∫ +=⎟⎠⎞
⎜⎝⎛= C)x(Fdx)x(F
dxd),x(fdx)x(f
dxd .
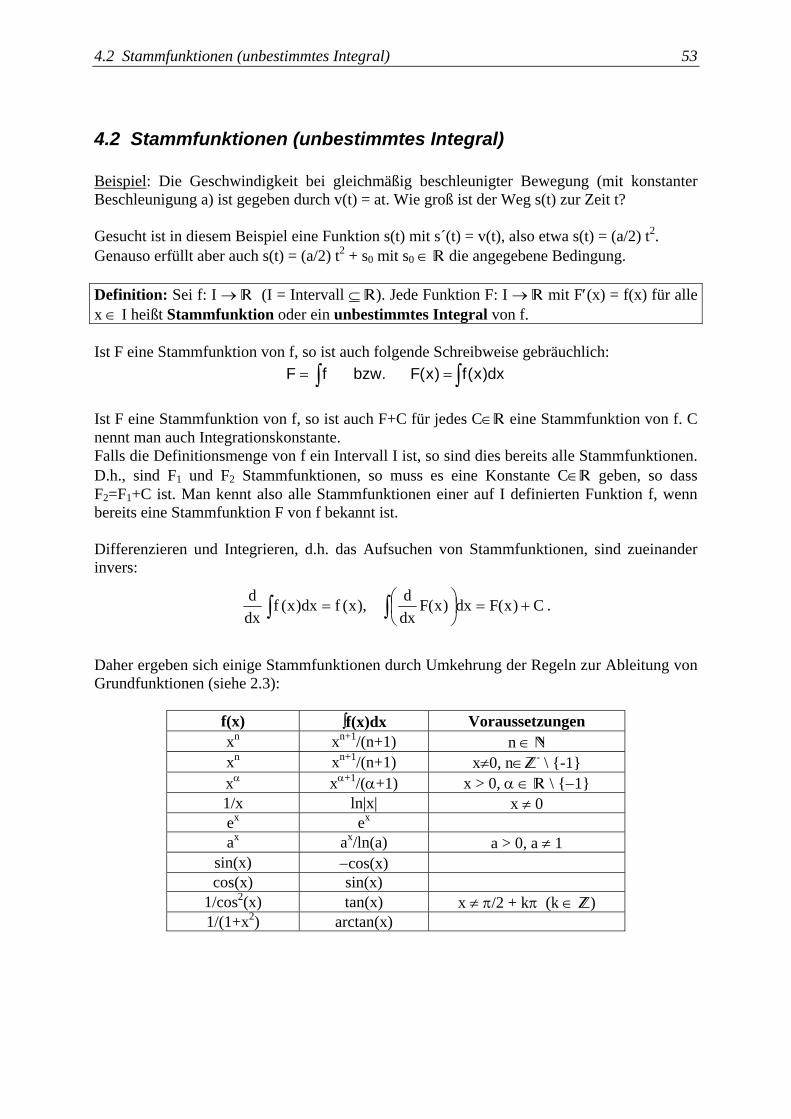
Daher ergeben sich einige Stammfunktionen durch Umkehrung der Regeln zur Ableitung von Grundfunktionen (siehe 2.3):
f(x) ∫f(x)dx Voraussetzungen xn xn+1/(n+1) n ∈ Õ xn xn+1/(n+1) x≠0, n∈Ÿ- \ {-1} xα xα+1/(α+1) x > 0, α ∈ — \ {−1} 1/x ln|x| x ≠ 0 ex ex ax ax/ln(a) a > 0, a ≠ 1
sin(x) −cos(x) cos(x) sin(x)
1/cos2(x) tan(x) x ≠ π/2 + kπ (k ∈ Ÿ) 1/(1+x2) arctan(x)

4.2 Stammfunktionen (unbestimmtes Integral) 54
Ferner liefert jede Differentiationsregel – von rechts nach links gelesen – eine Regel zur Berechnung eines unbestimmten Integrals. Daraus ergeben sich folgende Integrationsregeln:
1. ∫cf(x)dx = c∫f(x)dx
2. ∫(u(x) + v(x))dx = ∫u(x)dx + ∫v(x)dx
3. ∫u(x)v′(x)dx = u(x)v(x) − ∫u′(x)v(x)dx (partielle Integration)
4. ∫f(u(x))u′(x)dx = ∫f(u)du mit u = u(x) (Substitutionsregel)
Beispiele:
• ∫(6x2 + 12 x )dx = 6∫x2dx + 12∫x1/2dx = 2x3 +8 3x + C, C ∈ —
• ∫(x4 − 1)/x dx = ∫(x3 − 1/x)dx = (1/4)x4 − ln|x| + C
• ∫(x + sin(x))dx = x2/2 − cos(x) + C
• ∫ x cos(x) dx = x sin(x) − ∫sin(x)dx = x sin(x) + cos(x) + C (mit u = x, v′ = sin(x))
• ∫ln(x)dx = ∫ln(x)1dx = ln(x) x − ∫(1/x)xdx = x(ln(x) − 1) + C (mit u = ln(x), v′ = 1)
• ∫dx/(x2 + 4) = (1/4) ∫dx/((x2/4) + 1)dx = (1/2) ∫du/(u2 + 1) = (1/2) arctan(u) = (1/2) arctan(x/2) (mit u = x/2, du = (1/2)dx)
• ∫tan(x)dx = ∫sin(x)/cos(x)dx = −∫du/u = −ln|u| = −ln|cos(x)| + C (mit u = cos(x), du = −sin(x)dx)
• Es seien K(x) die Herstellungskosten eines Produkts in Abhängigkeit von der Menge x und k(x) = K′(x) die Grenzkosten, also die „Kosten der letzten Einheit“. Zu gegebenen Grenzkosten k(x) = 2x − 3 x und Fixkosten K0 = 10 sollen die Gesamtkosten K(x) und die Durchschnittskosten )x(K berechnet werden. Durch Integration von k(x) erhält man
Cx2xdx)x3x2(dx)x(k)x(K 32 +−=−== ∫∫
und aus K0 = C = 10 folgt schließlich 10x2x)x(K 32 +−= . Die Durchschnitts-kosten betragen somit x/10x2xx/)x(K)x(K +−== .
4.3 Berechnung von bestimmten Integralen 55
4.3 Berechnung von bestimmten Integralen
(i) Der Hauptsatzes der Differential- und Integralrechnung Hauptsatz der Differential- und Integralrechnung: Es sei f: D→—, I ein Intervall ⊆D und u∈I. Fasst man das bestimmte Integral als Funktion der oberen Integrationsgrenze auf, d.h., betrachtet man die Funktion („Integralfunktion“)
, ∫=x
u
dt)t(f)x(F
dann ist F(x) eine Stammfunktion von f(x), also F′(x) = f(x). Beweis: Unter Anwendung des Mittelwertsatzes der Integralrechnung gilt nämlich (mit ξ zwischen x und x + h)
)x(f)(flimh
)x(F)hx(Flim)x(F
)(fdt)t(fh1)dt)t(fdt)t(f(
h1
h)x(F)hx(F
0h0h
hx
x
x
u
hx
u
=ξ=−+
=′⇒
ξ==−=−+
→→
++
∫∫∫.
In dieser Beobachtung liegt der Schlüssel für den Zusammenhang zwischen dem bestimmten und unbestimmten Integral, wie der folgende Satz zeigt, der ebenfalls als „Hauptsatz der Differential- und Integralrechnung“ bezeichnet wird:
Hauptsatz der Differential- und Integralrechnung: Ist f: D→— eine auf dem Intervall [a,b]⊆D integrierbare Funktion und ist F eine beliebige Stammfunktion von f, so gilt:
)a(F)b(F)x(Fdx)x(f b
a
b
a
−==∫ .
Beweis: Es sei eine Integralfunktion von f und somit eine Stammfunktion
von f. Dann ist jede Funktion F mit F(x) = F
∫=x
uu dt)t(f)x(F
u(x) + C für jedes C∈R ebenfalls eine
Stammfunktion von f und es gilt:
∫∫∫∫∫ =+=+−+=−b
a
u
a
b
u
a
u
b
u
dx)x(fdx)x(fdx)x(f)Cdx)x(f()Cdx)x(f()a(F)b(F .
Beispiele:
• ∫abdx/x = ln |x| |ab = ln|b| − ln|a| = ln|b/a| (Vor: a, b entweder beide >0 oder beide <0!)
• ∫0πsin(x)dx = −cos(x) |0π = 2

4.3 Berechnung von bestimmten Integralen 56
• Wir berechnen den Effektivwert der Stromstärke i(t) gemäß ∫=T
0
2eff dt)t(i
T1I für
einen Wechselstrom i(t) = i0 sin(t) und T = 2π. Wegen
( )
∫
∫∫∫−=⇒
−+−=+−=
2)tcos()tsin(
2tdt)t(sin
dt)t(sin1)tcos()tsin(dt)t(cos)tcos()tsin(dt)t(sin
2
222
folgt
2
i21i
2)tcos()tsin(
2t
21idt)t(sini
21I 0
0
2
00
2
0
220eff =π
π=⎟
⎠⎞
⎜⎝⎛ −
π=
π=
ππ
∫
• Für den Gleichrichtwert eines Einweggleichrichters, d.i. der Mittelwert der Stromstärke eines Wechselstroms der Form i(t) = i0 sin(t) für 0 ≤ t ≤ π bzw. i(t) = 0 für π < t < 2π, erhält man mit a = 0 und b = 2π
.
π=−
π=+
π=
π=
ππ π
π
π
∫ ∫∫ 0
0
0
0
2
0
2
0g
i))tcos((
2i
)dt0dt)tsin(i(21dt)t(i
21I
(Vgl. Mittelwertsatz der Integralrechnung, Kapitel 4.1!)
(ii) Uneigentliche Integrale Wir betrachten eine Erweiterung des Integralbegriffs auf Funktionen mit Unendlichkeitsstellen sowie Integrale mit unendlichem Integrationsintervall, wie im folgenden dargestellt:

4.3 Berechnung von bestimmten Integralen 57
Es sei f eine auf dem Intervall [a,∞[ bzw. [a,b[ definierte Funktion, welche in jedem Teil-intervall [a,c] integrierbar ist. Hat f in b eine Unendlichkeitsstelle (linke Abbildung), so versteht man unter dem uneigentlichen Integral (1. Art)
, ∫∫ →=
c
abc
b
a
dx)x(flimdx)x(f
falls der Grenzwert auf der rechten Seite der Gleichung existiert. Im Fall eines unendlichen Integrationsintervalls (rechte Abbildung) ist das uneigentliche Integral (2. Art) gemäß
∫∫ ∞→
∞
=c
ac
a
dx)x(flimdx)x(f
definiert. Besitzt der Integrand eine Unendlichkeitsstelle in der Mitte des Integrationsinter-valls oder treten beide oben betrachteten Fälle zugleich auf, so ist das jeweilige Integral durch eine geeignete Aufspaltung auf obige Grundsituationen zurückzuführen. Beispiele:
• 2)c22(limx2limdxxlimx
dx0c
1
c0c
1
c
2/1
0c
1
0=−===
→→
−
→ ∫∫
• e1)ee(lim)e(limdxelimdxe 1c
c
c
1
x
c
c
1
x
c1
x =+−=−== −−
∞→
−
∞→
−
∞→
∞ − ∫∫
4.3… Differentialgleichungen 58
4.3 Differentialgleichungen In diesem Kapitel betrachten wir Prozesse, welche kontinuierlich ablaufen, wie z.B. viele Naturvorgänge, technische Abläufe, chemische Reaktionen, wirtschaftliche Abläufe, usw. Die Beschreibung derartiger Prozesse erfolgt vielfach mittels Differentialgleichungen, d.s. Gleichungen, in denen eine Beziehung zwischen einer gesuchten Funktion f und ihren Ableitungen f’, f“, … beschrieben wird. Lösungen von Differentialgleichungen sind also Funktionen (bzw. Mengen von Funktionen). Beispiel 1: In einem Wachstumsprozess ist die Änderung proportional zum jeweiligen Bestand (z. B. Bakterienwachstum):
f’(x) = k⋅f(x) (wobei k∈R eine gegebene Zahl ist) Lösungen dieser Differentialgleichung sind alle Funktionen der Art:
f(x) = C⋅ekx (mit C∈R beliebig),
wie man durch Einsetzen sofort sieht. (Wie man solche Lösungsfunktionen ermittelt, werden wir später behandeln.) Beispiel 2 (Freier Fall): Es sei s eine Zeit-Weg-Funktion (besser: Zeit-Ort-Funktion) und g die Erdbeschleunigung (9,81 ms−2). Dann wird die Bewegung beim freien Fall beschrieben durch die Gleichung:
s″(t) = g,
Durch Integration erhält man s′(t) = gt + C1 und weiter s(t) = (g/2)t2 + C1t + C2 mit C1, C2 ∈ —. Letztere Gleichung stellt die sogenannte allgemeine Lösung der Differentialgleichung dar. Die beiden Integrationskonstanten C1 und C2 können durch Vorgabe von Anfangsbedingungen, etwa s(0) = s0 und s′(0) = v0 bestimmt werden: C1 = v0, C2 = s0. Somit erhält man als spezielle Lösung das Weg-Zeit-Gesetz s(t) = (g/2)t2 + v0t + s0. Beispiel 3 (Logistisches Wachstum): Es handelt sich um ein grundlegendes Wachstumsmodell in der Biologie (Zellwachstum, Populationswachstum), aber auch in der Wirtschaft (Entwicklung eines Marktanteils). Sei N(t) die Populationsgröße in Abhängigkeit von der Zeit, r eine Wachstumsrate und K eine Sättigungskonstante. Die Gleichung für das logistische Wachstum lautet dann
N′(t) = rN(1 − N/K).
D.i. eine Differentialgleichung für N(t) mit der Lösung
N = 0 oder rtCe1K)t(N −+
= , C ∈ —
(wie man durch Einsetzen bestätigt). Dabei kann die Konstante C wieder aus einer Anfangs-bedingung, etwa N(0) = N0, ermittelt werden. Man erhält C = (K − N0)/N0 und damit die Lösung
rt
0
0 eN
NK1
K)t(N−−
+= .
4.3… Differentialgleichungen 59
Häufig bezeichnet man in einer Differentialgleichung die gesuchte Funktion mit y(x) bzw. y; z. B.:
y’ = k⋅y oder y’ - k⋅y = 0 bzw.:
y’ = r⋅y⋅(1 − y/K) oder y’ - r⋅y + r⋅y2/K = 0
Allgemein kann man eine Differentialgleichung auf die Form
F(x, y(x), y′(x), y″(x), ..., y(n)) = 0,
kurz: F(x, y, y′, y″, ..., y(n)) = 0 bringen. Wir beschäftigen uns in diesem Kapitel mit Differentialgleichungen für Funktionen in einer Variablen. Man nennt diese dann gewöhnliche Differentialgleichungen. (Differentialgleichungen für Funktionen in mehreren Variablen heißen partielle Differentialgleichungen; siehe Kapitel 8!) Kommt in einer Differentialgleichung eine n-te Ableitung, aber keine Ableitung höherer Ordnung vor, so spricht man von einer Differentialgleichung n-ter Ordnung. Insbesondere ist eine Differentialgleichung 1. Ordnung durch F(x, y, y′) = 0 gegeben, woraus sich in einfachen Fällen y’ explizit durch y′ = f(x,y) ausdrücken lässt. (Achtung: y ist die gesuchte Funktion, während f bzw. F eine gegebene Funktion in x und y ist.) Unter einer Lösung der Differentialgleichung (auch: „Integral einer Differentialgleichung“) verstehen wir eine Funktion y(x), welche mit ihren Ableitungen die gegebene Gleichung erfüllt. Wir unterscheiden:
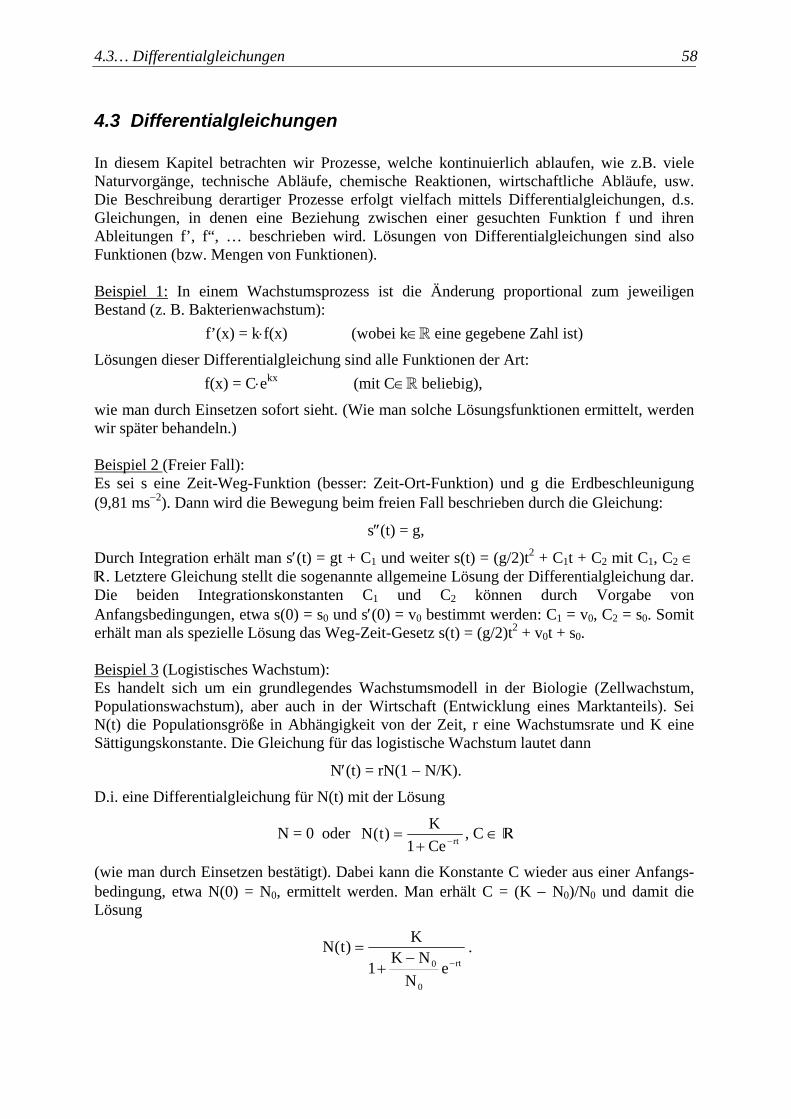
• Die allgemeine Lösung enthält beliebig wählbare Parameter C1, C2, usw. und ent-spricht einer Schar von Lösungskurven, z.B. s(t) = (g/2)t2 + C1t + C2 mit C1, C2 ∈ — in Beispiel 1.
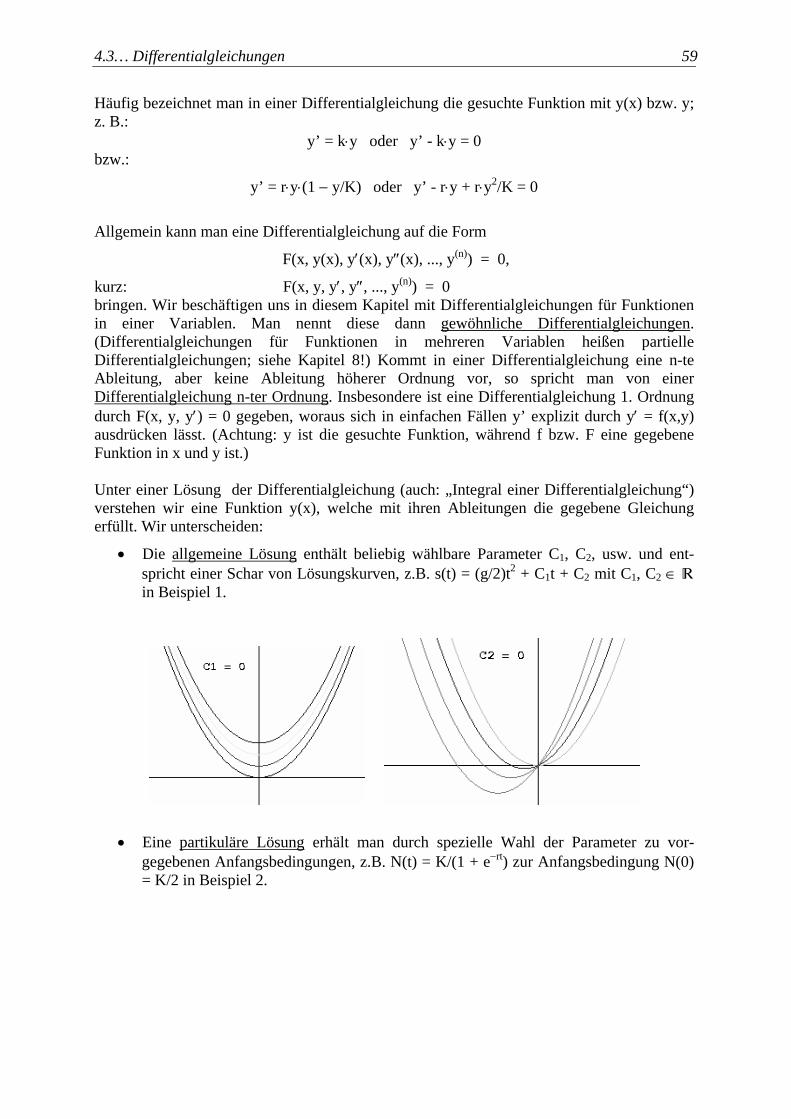
• Eine partikuläre Lösung erhält man durch spezielle Wahl der Parameter zu vor-gegebenen Anfangsbedingungen, z.B. N(t) = K/(1 + e−rt) zur Anfangsbedingung N(0) = K/2 in Beispiel 2.
4.3… Differentialgleichungen 60
• Manchmal gibt es noch weitere Lösungen, z.B. so genannte singuläre Lösungen.
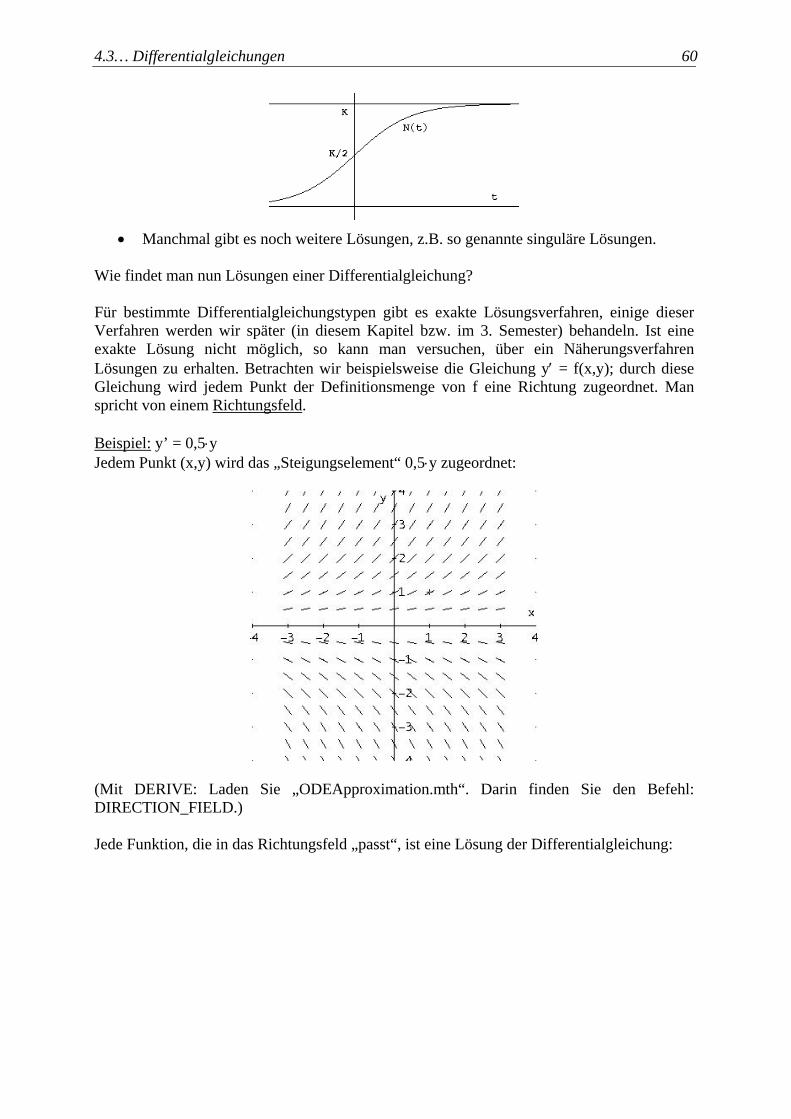
Wie findet man nun Lösungen einer Differentialgleichung? Für bestimmte Differentialgleichungstypen gibt es exakte Lösungsverfahren, einige dieser Verfahren werden wir später (in diesem Kapitel bzw. im 3. Semester) behandeln. Ist eine exakte Lösung nicht möglich, so kann man versuchen, über ein Näherungsverfahren Lösungen zu erhalten. Betrachten wir beispielsweise die Gleichung y′ = f(x,y); durch diese Gleichung wird jedem Punkt der Definitionsmenge von f eine Richtung zugeordnet. Man spricht von einem Richtungsfeld. Beispiel: y’ = 0,5⋅y Jedem Punkt (x,y) wird das „Steigungselement“ 0,5⋅y zugeordnet:
(Mit DERIVE: Laden Sie „ODEApproximation.mth“. Darin finden Sie den Befehl: DIRECTION_FIELD.) Jede Funktion, die in das Richtungsfeld „passt“, ist eine Lösung der Differentialgleichung:
4.3… Differentialgleichungen 61
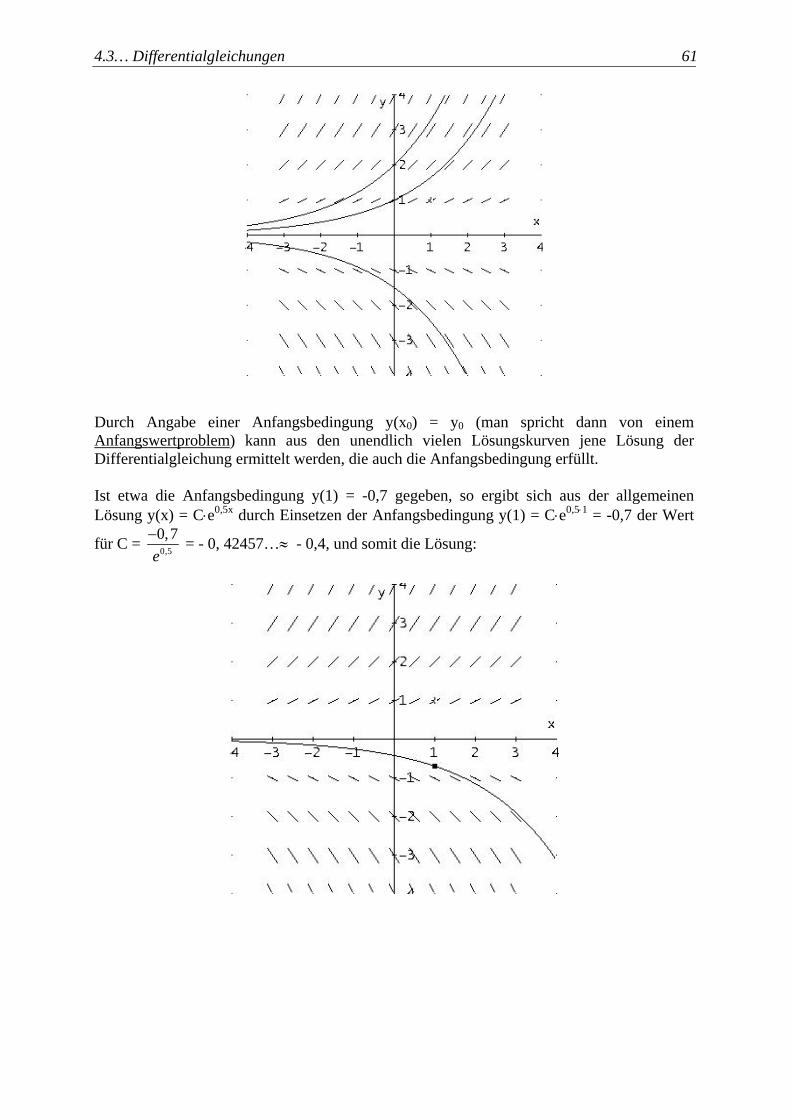
Durch Angabe einer Anfangsbedingung y(x0) = y0 (man spricht dann von einem Anfangswertproblem) kann aus den unendlich vielen Lösungskurven jene Lösung der Differentialgleichung ermittelt werden, die auch die Anfangsbedingung erfüllt. Ist etwa die Anfangsbedingung y(1) = -0,7 gegeben, so ergibt sich aus der allgemeinen Lösung y(x) = C⋅e0,5x durch Einsetzen der Anfangsbedingung y(1) = C⋅e0,5⋅1 = -0,7 der Wert
für C = 0,5
0,7e− = - 0, 42457…≈ - 0,4, und somit die Lösung:
4.3… Differentialgleichungen 62
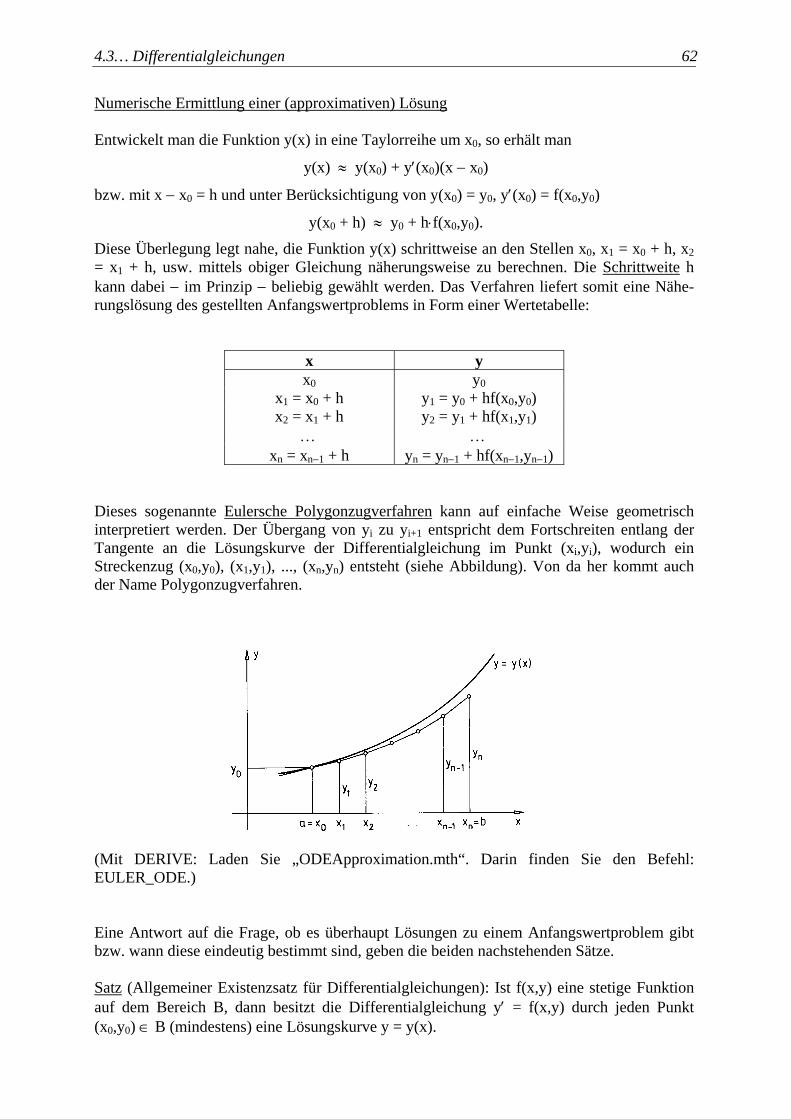
Numerische Ermittlung einer (approximativen) Lösung Entwickelt man die Funktion y(x) in eine Taylorreihe um x0, so erhält man
y(x) ≈ y(x0) + y′(x0)(x − x0)
bzw. mit x − x0 = h und unter Berücksichtigung von y(x0) = y0, y′(x0) = f(x0,y0)
y(x0 + h) ≈ y0 + h⋅f(x0,y0).
Diese Überlegung legt nahe, die Funktion y(x) schrittweise an den Stellen x0, x1 = x0 + h, x2 = x1 + h, usw. mittels obiger Gleichung näherungsweise zu berechnen. Die Schrittweite h kann dabei − im Prinzip − beliebig gewählt werden. Das Verfahren liefert somit eine Nähe-rungslösung des gestellten Anfangswertproblems in Form einer Wertetabelle:
x y x0 y0
x1 = x0 + h y1 = y0 + hf(x0,y0) x2 = x1 + h y2 = y1 + hf(x1,y1)
… … xn = xn−1 + h yn = yn−1 + hf(xn−1,yn−1)
Dieses sogenannte Eulersche Polygonzugverfahren kann auf einfache Weise geometrisch interpretiert werden. Der Übergang von yi zu yi+1 entspricht dem Fortschreiten entlang der Tangente an die Lösungskurve der Differentialgleichung im Punkt (xi,yi), wodurch ein Streckenzug (x0,y0), (x1,y1), ..., (xn,yn) entsteht (siehe Abbildung). Von da her kommt auch der Name Polygonzugverfahren.
(Mit DERIVE: Laden Sie „ODEApproximation.mth“. Darin finden Sie den Befehl: EULER_ODE.) Eine Antwort auf die Frage, ob es überhaupt Lösungen zu einem Anfangswertproblem gibt bzw. wann diese eindeutig bestimmt sind, geben die beiden nachstehenden Sätze. Satz (Allgemeiner Existenzsatz für Differentialgleichungen): Ist f(x,y) eine stetige Funktion auf dem Bereich B, dann besitzt die Differentialgleichung y′ = f(x,y) durch jeden Punkt (x0,y0) ∈ B (mindestens) eine Lösungskurve y = y(x).
4.3… Differentialgleichungen 63
Satz (Existenz- und Eindeutigkeitssatz): Ist die Funktion f(x,y) stetig auf dem Bereich B und erfüllt dort die Lipschitzbedingung
|f(x,y2) − f(x,y1)| ≤ L |y2 − y1| ∀x,y1,y2
mit einer Lipschitzkonstanten L > 0, dann hat die Differentialgleichung y′ = f(x,y) zu jedem (x0,y0) ∈ B genau eine Lösung, welche die Anfangsbedingung y(x0) = y0 erfüllt.
Lineare Differentialgleichungen 1. Ordnung Eine der wichtigsten Differentialgleichungstypen ist die lineare Differentialgleichung 1. Ord-nung, d.i. eine Gleichung der Form
⎩⎨⎧
=+′Gleichung inhomogene)x(sGleichunghomogenen 0
y)x(ay .
Dabei sind a(x) und s(x) beliebige Funktionen in x, s(x) heißt Störfunktion. Falls s(x) = 0 für alle x ist (d.h. s(x)≡0), spricht man von einer homogenen, sonst von einer inhomogenen Gleichung. Allgemein spricht man von einer linearen Differentialgleichung (oder Differentialgleichung vom Grad 1), wenn y, y’, y’’, … höchstens in der ersten Potenz auftreten und auch keine Produkte von diesen vorkommen. Der Grad einer Differentialgleichung ist der höchste auftretende Exponent (bzw. Exponentensumme in einem Produkt) von y,. y’, y’’, … Unter der Ordnung einer Differentialgleichung versteht man die höchste auftretende Ableitung. Grundlegend für die Lösung linearer Differentialgleichungen ist der folgende Satz: Die Lösungsgesamtheit der linearen inhomogenen Differentialgleichung y′ + a(x)y = s(x) ist gegeben durch y(x) = yh(x) + yp(x), wo yh(x) die allgemeine Lösung der zugehörigen homogenen Gleichung y′ + a(x)y = 0 und yp(x) eine beliebige partikuläre Lösung der gegebenen inhomogenen Gleichung ist. Damit ergibt sich der folgende Lösungsweg für lineare Differentialgleichungen 1. Ordnung:
1. Lösung der homogenen Gleichung durch „Trennung der Variablen“
2. Bestimmung einer partikulären Lösung der inhomogenen Gleichung, etwa durch „Variation der Konstanten“ oder durch einen unbestimmten Ansatz
3. Ermittlung der Lösungsgesamtheit gemäß y(x) = yh(x) + yp(x). Ad 1.: Die homogene Gleichung lautet y′ + a(x)y = 0. Umformung und anschließende Integration führt zu
0
( )
( )
ln ( )
( ) a x dxh
y a xy
y a x dx C
y x Ce mit C beliebig−∫
′= −
= − +
= ∈
∫R
.

4.3… Differentialgleichungen 64
In der Praxis rechnet man folgendermaßen:
∫∫ −=⇒−=⇒=+ .usw,dx)x(ay
dydx)x(ay
dy0y)x(adxdy
D.h., es werden die beiden Variablen x und y formal getrennt und beide Seiten der Gleichung − einmal nach x und einmal nach y − integriert. Aus diesem Grund spricht man von der Methode der Trennung der Variablen. Ad 2.: Zur Bestimmung einer partikulären Lösung der inhomogenen Gleichung y′ + a(x)y = s(x) macht man den Ansatz
, ∫−= dx)x(ap e)x(C)x(y
d.h., man ersetzt die Konstante C in der homogenen Lösung gemäß 1. durch eine zunächst noch unbekannte Funktion C(x) (Variation der Konstanten). Durch Einsetzen von yp(x) und yp′(x) in die inhomogenen Gleichung wird C(x) ermittelt. Beispiel: Gesucht ist die allgemeine Lösung der linearen Differentialgleichung
2x4yx
x1y =−
−′ .
Wir lösen zunächst die zugehörige homogene Gleichung durch Trennung der Variablen gemäß 1. und erhalten
xh Cxe)x(y
Clnxxlnyln
dx1x1
ydy
dxx
x1y
dy
0yx
x1y
−=
+−=
⎟⎠⎞
⎜⎝⎛ −=
−=
=−
−′
∫∫ .
mit C ∈ —. Variation der Konstanten gemäß 2. führt zum Ansatz und Ein-setzen in die inhomogene Gleichung liefert
xp xe)x(C)x(y −=
)1x(e4dxxe4)x(C
xe4)x(C
x4xe)x(Cx
x1xe)x(Ce)x(Cxe)x(C
x4yx
x1y
xx
x
2xxxx
2
−==
=′
=−
−−+′
=−
−′
∫
−−−−.
Damit lautet die partikuläre Lösung . Addition von y)1x(x4xe)x(C)x(y xp −== −
h und yp
gemäß 3. ergibt schließlich , C ∈ —, das ist die allgemeine Lösung. (Machen Sie die Probe!)
)xx(4Cxe)x(y)x(y)x(y 2xph −+=+= −
4.3… Differentialgleichungen 65
Beispiel: Wir betrachten ein einfaches Modell der Volkswirtschaft zur Beschreibung des zeitlichen Verlaufs des Volkseinkommens Y(t) und der Staatsverschuldung D(t). Dabei werde angenommen, dass
D′(t) = αY(t)
mit α > 0, d.h., die Neuverschuldung D′ sei proportional zum Volkseinkommen Y. Ferner gelte Y(0) = Y0 und D(0) = 0. Man untersuche die zeitliche Entwicklung des Verhältnisses von Staatsverschuldung zu Volkseinkommen, falls das Volkseinkommen (a) konstant bleibt bzw. (b) mit konstanter Rate r > 0 anwächst. Im Fall (a) setzen wir zunächst Y(t) = Y0 konstant. Die Differentialgleichung für D(t) lautet dann D′(t) = αY0 und besitzt die allgemeine Lösung D(t) = αY0t + C. Mit der Anfangs-bedingung D(0) = 0 folgt C = 0 und somit D(t) = αY0t. Für das Verhältnis D zu Y gilt dann
∞→∞→α=α
= tfür tY
tY)t(Y)t(D
0
0 ,
d.h., der Anteil der Staatsverschuldung am Volkseinkommen wird im Lauf der Zeit erwar-tungsgemäß unbeschränkt anwachsen. Wächst hingegen das Volkseinkommen gemäß (b) mit der Rate r, dann erhält man Y(t) als Lösung der linearen homogenen Differentialgleichung Y′(t) = rY(t) zur Anfangsbedingung Y(0) = Y0. Dabei ergibt sich − nach Trennung der Variablen und anschließender Integration − für das Volkseinkommen Y(t) = Y0ert. Die Berechnung von D(t) führt auf
)1e(Yr
)t(D0)0(D,CeYr
)t(DeY)t(D rt0
rt0
rt0 −
α=⇒=+
α=⇒α=′ .
Für das Verhältnis von D zu Y gilt schließlich in diesem Fall
∞→α
→−α
=−
α
= − tfür r
)e1(reY
)1e(Yr
)t(Y)t(D rt
rt0
rt0
,
d.h., bei exponentiell anwachsendem Volkseinkommen bleibt die Gesamtverschuldung trotz laufend unausgeglichenen Staatshaushaltes in einem lenkbaren Verhältnis zum Volksein-kommen. Die Methode der Trennung der Variablen kann mitunter auch bei nicht-linearen Differential-gleichungen mit Erfolg angewendet werden, wie das nächste Beispiel zeigt. Ad Beispiel 3 (S. 58): Wir kehren zurück zur logistischen Wachstumsgleichung
N′(t) = rN(1 − N/K)
von Beispiel 3, einer nicht-linearen Differentialgleichung 1. Ordnung für die Funktion N(t). Die im vorhergehenden Abschnitt angegebenen Lösung soll nun nach der Methode der Tren-nung der Variablen hergeleitet werden.
dN NrN 1dt K
dN rdtNN 1K
⎛ ⎞= −⎜ ⎟⎝ ⎠
=⎛ ⎞−⎜ ⎟⎝ ⎠

4.3… Differentialgleichungen 66
K dN rdtN(K N)
=−
rt
rt
rt
1 1 dN rdtN K N
ln N ln(K N) rt ln CN Ce
K NKCeN
1 Ce
⎛ ⎞+ =⎜ ⎟−⎝ ⎠− − = +
=−
=+
∫ ∫
Aus der letzten Gleichung folgt schließlich die allgemeine Lösung der logistischen Gleichung
gemäß rt1eC1
K)t(N −+= mit C1 ∈ —.

4.5 Fourierreihen 67
4.5 Fourierreihen Unter den zahlreichen Anwendungen der Integralrechnung, etwa der Berechnung von Bogen-längen, Oberflächen und Volumina, der Bestimmung von Schwerpunkten, usw. soll hier exemplarisch die Beschreibung periodischer Vorgänge mittels Fourierreihen vorgestellt werden. Wiederkehrende Vorgänge werden in der Mathematik durch periodische Funktionen dargestellt. Dabei nennt man eine Funktion f: — → — periodisch mit der Periode T, falls f(x + T) = f(x) für alle x gilt. Beispiele für periodische Funktionen sind etwa sin x, cos x, aber auch alle trigonometrischen Reihen der Form
. 0 1 1 2 2( ) cos sin cos 2 sin 2f x a a x b x a x b x= + + + + +…
Jede solche endliche oder unendliche Reihe (falls sie konvergiert) ist eine periodische Funktion mit der Periode T = 2π. Es stellt sich die Frage, ob umgekehrt jede 2π-periodische Funktion durch eine solche Reihe dargestellt oder zumindest angenähert werden kann. Dies gilt tatsächlich (unter bestimmten Voraussetzungen; s.u.). Es sei f eine periodische Funktion mit der Periode T = 2π. Wie kann man die zur Darstellung benötigten Koeffizienten a0, an und bn berechnen? Ist f bereits durch eine solche Reihe gegeben, also:
( )01
( ) cos sinn nn
f x a a nx b nx∞
=
= + +∑ ,
so erhält man durch Integration:
2 2 2 2
0 010 0 0 0
( ) cos sin 2n nn
f x dx a dx a nx dx b nx dx aπ π π π
π∞
=
⎛ ⎞= + + =⎜ ⎟
⎝ ⎠∑∫ ∫ ∫ ∫
Wegen und für alle n∈N0dx)nxcos(2
0
=∫π
0dx)nxsin(2
0
=∫π
* erhält man daraus:
2
00
1 ( )2
a f xπ
π= ∫ dx .
Und wegen 2
02
02
0
0cos( ) cos( )
0sin( ) sin( )
sin( ) cos( ) 0
wenn m nmx nx dx
wenn m n
wenn m nmx nx dx
wenn m n
mx nx dx
π
π
π
π
π
≠⎧= ⎨ =⎩
≠⎧= ⎨ =⎩
=
∫
∫
∫
erhält man aus 2
0
( ) cosf x nx dπ
∫ x bzw. 2
0
( )sinf x nx dπ
∫ x :
2 2
0 0
1 1( )cos , ( )sinn na f x nx dx b f x nx dxπ π
π π= =∫ ∫ .

4.5 Fourierreihen 68
Die Koeffizienten a0, an und bn heißen Fourierkoeffizienten und die entsprechende Reihe
( )01
ˆ ( ) cos sinn nn
f x a a nx b nx∞
=
= + +∑
heißt Fourierreihe von f. Bemerkung: Manchmal sieht man auch die Darstellung
( )0
1
ˆ ( ) cos sin2 n n
n
af x a nx b∞
=
= + +∑ nx
Dann ist a0 mit Hilfe der Formel 2
00
1 ( )a f xπ
π= ∫ dx zu berechnen.
Satz: Ist f eine stückweise stetige, 2π-periodische Funktion und existieren im Punkt x0 die linksseitige und rechtsseitige Ableitung von f, dann konvergiert die Fourierreihe in xf̂ 0 gegen den Funktionswert f(x0), wenn f in x0 stetig ist (bzw. gegen das arithmetische Mittel aus linksseitigem und rechtsseitigem Grenzwert von f, wenn f eine Sprungstelle in x0 hat). Beispiel: Gesucht ist die Fourierreihe f von ˆ
. )x(f)2x(fund2xfür1
x0für1)x(f =π+
⎩⎨⎧
π<<π−π≤≤
=
Wir berechnen die Fourierkoeffizienten:
2 2
00 0
2
0
22
00
1 1( ) 1 ( 1) 02 2
1 cos cos 0
1 1 1 1sin sin cos cos
1 1( cos cos0 cos 2 cos ) (2 2cos )
02 (1 cos )
n
n
a f x dx dx dx
a nx dx nx dx
b nx dx nx dx nx nxn n
n n n nn n
für n gen
n
π π π
π
π π
π
π ππ π
ππ
π π
π
π π π π
π π π ππ π
ππ
⎛ ⎞= = + − =⎜ ⎟
⎝ ⎠⎛ ⎞
= − =⎜ ⎟⎝ ⎠
= − = − +
= − + + − = − =
= − =
∫ ∫ ∫
∫ ∫
∫ ∫ =
4rade
für n ungeradenπ
⎧⎪⎨⎪⎩
und erhalten damit die Reihe
…+π
+π
+π
= x5sin54x3sin
34xsin4)x(f̂ .
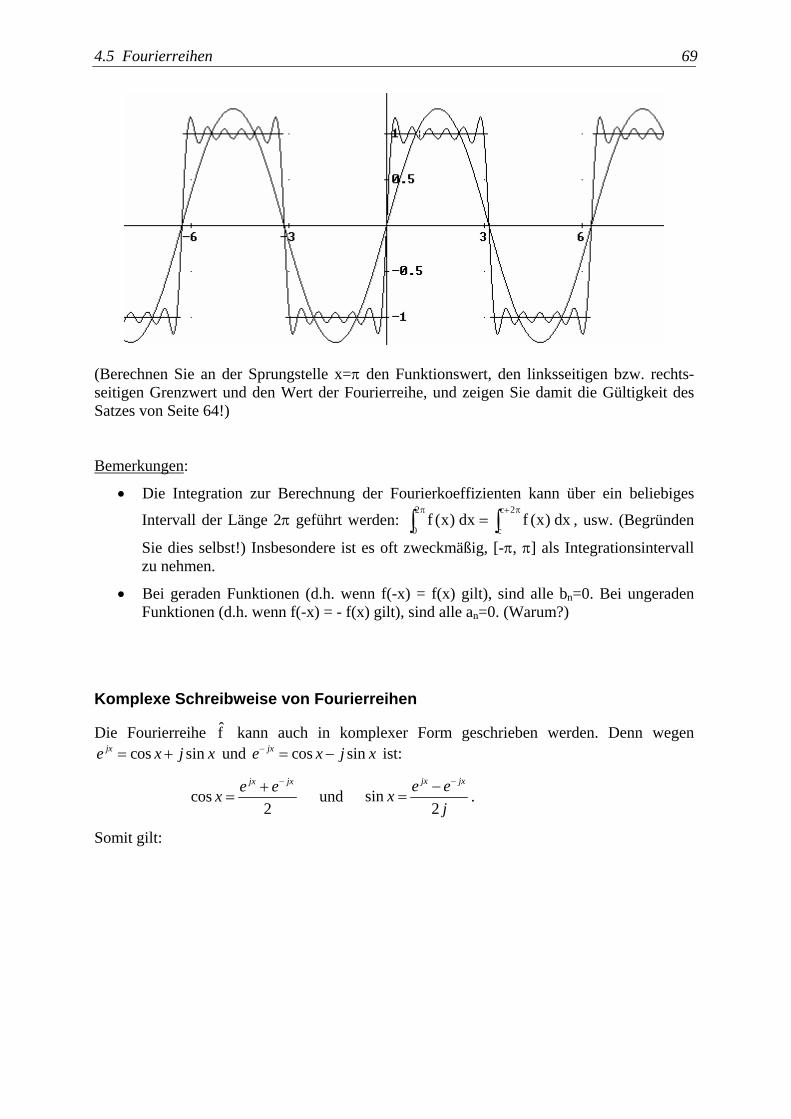
Die ursprüngliche Funktion zusammen mit zwei Partialsummen dieser Fourierreihe als Näherungen sind in nachstehender Abbildung dargestellt.
4.5 Fourierreihen 69
(Berechnen Sie an der Sprungstelle x=π den Funktionswert, den linksseitigen bzw. rechts-seitigen Grenzwert und den Wert der Fourierreihe, und zeigen Sie damit die Gültigkeit des Satzes von Seite 64!) Bemerkungen:
• Die Integration zur Berechnung der Fourierkoeffizienten kann über ein beliebiges
Intervall der Länge 2π geführt werden: , usw. (Begründen
Sie dies selbst!) Insbesondere ist es oft zweckmäßig, [-π, π] als Integrationsintervall zu nehmen.
∫∫π+π
=2c
c
2
0dx)x(fdx)x(f
• Bei geraden Funktionen (d.h. wenn f(-x) = f(x) gilt), sind alle bn=0. Bei ungeraden Funktionen (d.h. wenn f(-x) = - f(x) gilt), sind alle an=0. (Warum?)
Komplexe Schreibweise von Fourierreihen
Die Fourierreihe f kann auch in komplexer Form geschrieben werden. Denn wegen und ist: ˆ
cos sinjxe x j= + x xcos sinjxe x j− = −
cos2
jx jxe ex−+
= und sin2
jx jxe exj
−−= .
Somit gilt:

4.5 Fourierreihen 70
( )
( )
01
01
01
01
0
ˆ ( ) cos sin
2 2
2 2 2 2
2 2
n nn
jnx jnx jnx jnx
n nn
jnx jnxn n n n
n
jnx jnxn n n n
n
jnx jnxn n
n
f x a a nx b nx
e e e ea a bj
a b a ba e ej j
a jb a jba e e
a c e c e
∞
=
− −∞
=
∞−
=
∞−
=
−
=
= + + =
⎛ ⎞+ −= + + =⎜ ⎟
⎝ ⎠⎛ ⎞⎛ ⎞ ⎛ ⎞
= + + + − =⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠
⎛ − + ⎞⎛ ⎞ ⎛ ⎞= + + =⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠
= + +
∑
∑
∑
∑
1
0 0
: :2 2
: , :
n n n nn n
jnxn n
n
a jb a jbmit c und c
c e mit a c c c
∞
∞
−=−∞
− +
n
= = =
= = =
∑
∑
.
Dabei gilt:
2
0 00
1 ( )2
c a f x dxπ
π= = ∫
( )2 2
0 02 2
( ) *
0 0
1 1( ) cos sin ( )2 2 2
1 1... ( ) ( )2 2
jnxn nn
jnx j n xn
a jbc f x nx j nx dx f x e dx
c f x e dx f x e dx
π π
π π
π π
π π
−
− −−
−= = − =
= = = ∀ ∈
∫ ∫
∫ ∫ Nn
Diese drei Formeln lassen sich zu einer zusammenfassen: 2
0
1 ( )2
jnxnc f x e dx n
π
π−= ∀∫ Z∈
Periodische Funktionen mit Periode T
Periodische Funktionen mit beliebiger Periode T können ganz analog in Fourierreihen entwickelt werden. Es gilt: Ist f(x) periodisch mit Periode 2π, dann ist f(ωx) mit ω = 2π/T periodisch mit Periode T.
Bezeichnungen: T ... Schwingungsdauer
1f :T
= ... Frequenz
ω := 2πf ... Kreisfrequenz Insbesondere haben die Funktionen sin (ωx) und cos (ωx) die Periode T, denn: sin(ω(x+T)) = sin(ωx+ωT)) = sin(ωx+2π)) = sin(ωx), analog für cos (ωx).

4.5 Fourierreihen 71
Allgemein gilt für die Fourierreihe einer Funktion f mit der Periode T:
( )01
( ) cos( ) sin( )n nn
f x a a n x b n xω ω∞
=
= + +∑
wobei: 00
1 ( )T
a f x dxT
= ∫ , T T
n n0 0
2 2f (x) cos(n x)dx , b f (x)sin(n x)dxT T
= ω = ω∫ ∫a
Bzw. in komplexer Darstellung: ( ) jn xn
n
f x c e ω∞
=−∞
= ∑ mit 0
1 ( )T
jn xnc f x e dx n
Tω−= ∀ ∈∫ Z
Physikalische Deutung der Fourieranalyse periodischer Funktionen Eine periodische Funktion mit der Kreisfrequenz ω kann in eine Summe von Grundschwingungen mit den Kreisfrequenzen n⋅ω (n∈Õ*, bzw. in komplexer Darstellung: n⋅ω mit n∈Ÿ) zerlegt werden. Zu jeder dieser Kreisfrequenzen gibt es einen Koeffizienten cn, der die Intensität der jeweiligen Grundschwingung angibt. Die Koeffizienten ... c-2, c-1, c0, c1, c2, ... heißen (Linien-)Spektrum von f. Durch das Linienspektrum ist die Funktion f (fast) vollständig gegeben (bis auf die Funktionswerte an den Unstetigkeitsstellen).
Fourieranalyse nichtperiodischer Funktionen Addiert man zwei periodische Funktionen mit den Kreisfrequenzen ω1 und ω2, so erhält man
genau dann wieder eine periodische Funktion, wenn 1
2
ω∈
ωQ , d.h. wenn es eine Frequenz ω
gibt, von der ω1 und ω2 ganzzahlige Vielfache sind. Es gibt aber in der Natur viele Vorgänge / Erscheinungen, die nicht periodisch sind, sich aber dennoch aus periodischen Elementen aufbauen. (Beispiel: weißes Licht) Aus den cn, die man als Funktionswerte einer Funktion mit Definitionsmenge Ÿ auffassen kann, wird nun eine Funktion c mit Definitionsmenge —. („Spektraldichte“)
Wir setzen in ( ) jn xn
n
f x c e ω∞
=−∞
= ∑ für 2
02
1 1( ) ( )
TT
jn x jn xn
T
c f x e dx f x eT T
ω−
−
= =∫ ∫ dxω− ein (wobei wir
für die Integrationsvariable einen anderen Buchstaben nehmen):
2
2
1( ) ( )
T
jn x jn y jn xn
n n T
f x c e f y e dy eT
ω ω ω∞ ∞
−
=−∞ =−∞−
⎛ ⎞⎜ ⎟= = ⎜ ⎟⎜ ⎟⎝ ⎠
∑ ∑ ∫
Wir formen die Summanden auf folgende Weise um:

4.5 Fourierreihen 72
2 2
2 2
1 1 2( ) ( ) ( 1)2
T T
jn y jn y
T T
f y e dy f y e dy n nT T
ω ω 2T
π ππ
− −
− −
⎛ ⎞⎜ ⎟ ⎛= ⋅ −⎜ ⎟⎜ ⎟ ⎝ ⎠⎜ ⎟⎝ ⎠
∫ ∫ ⎞−
⇒
( )
2
2
1( )
1 2 2( ) ( ) ( 1)2
( ) n
T
jn y jn xn
n T
jt xn
n
nn nt t tF t
2f x f y e dy e n n n nT T T
F t e t
ω ω π π πωπ
∞−
=−∞−
∞
=−∞
−− =Δ
⎛ ⎞⎛ ⎞⎜ ⎟⎜ ⎟ ⎛ ⎞= − − =⎜ ⎟⎜ ⎟⎜ ⎟ ⎝ ⎠⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
= Δ
∑ ∫
∑
t= ⋅ =
Dieser Ausdruck kann als Riemann’sche Summe zur Zerlegung von ]-∞,∞[ in die Intervalle
4 2 2 2 2 4... , [ , ], [ ,0], [0, ], [ , ], ...T T T T T Tπ π π π π π
− − −
auffassen. Mit T → ∞ wird aus der obigen Summe (unter geeigneten Voraussetzungen; s.u.) das Integral:
( ) jtxF t e dt∞
−∞∫
Somit erhalten wir:
: ( )
1( ) ( )2
jyt jxt
F t
f x f y e dyπ
∞ ∞−
−∞ −∞
=
⎛ ⎞= ⎜ ⎟
⎝ ⎠∫ ∫ e dt
Die Funktion F mit 1( ) ( )2
jytF t f y e dyπ
∞−
−∞
= ∫ heißt das (kontinuierliche) Spektrum oder
Spektralfunktion oder die Fouriertransformierte von f. Die Existenz ist jedenfalls dann
gegeben, wenn ( )f y dy∞
−∞∫ existiert, d.h. insbesondere, wenn f(y) sich asymptotisch gegen 0
nähert für y → ±∞ oder wenn f(y)=0 für alle y außerhalb eines passenden beschränkten Intervalls. Die Transformation f F lässt sich mit ähnlichen Formeln umkehren. Es gilt:
( ) ( ) jyxf x F y e d∞
−∞
= ∫ y