4. interpolationsfunktionen als ansatzfunktionen 4bis6.pdf · wobei die lagrangeschen polynome in...
TRANSCRIPT
102 4. Interpolationsfunktionen als Ansatzfunktionen
4. Interpolationsfunktionen als AnsatzfunktionenIn diesem Kapitel werden kurz Lagrangesche, Hermitesche und Legendresche Inter-polationsfunktionen dargestellt und ihre Anwendung zur Konstruktion von Ansatz-funktionen für die FEM behandelt.
4.1. Lagrangesche Polynome für C0 stetige ElementeWenn im eindimensionalen Fall an N+1 Stützstellen die Funktionswerte yK
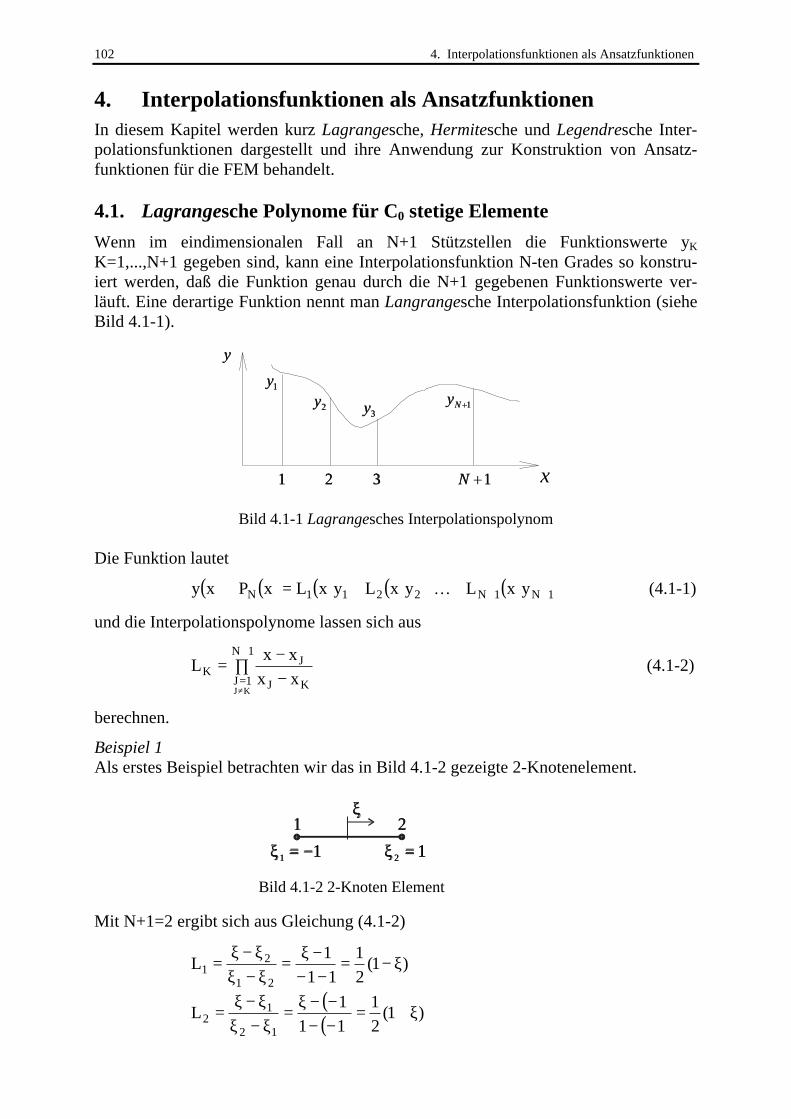
K=1,...,N+1 gegeben sind, kann eine Interpolationsfunktion N-ten Grades so konstru-iert werden, daß die Funktion genau durch die N+1 gegebenen Funktionswerte ver-läuft. Eine derartige Funktion nennt man Langrangesche Interpolationsfunktion (sieheBild 4.1-1).
y1
y2 y3yN+1
y
N +1321 x
Bild 4.1-1 Lagrangesches Interpolationspolynom
Die Funktion lautet
( ) ( ) ( ) ( ) ( ) 1N1N2211N yxLyxLyxLxPxy +++++=≅ K (4.1-1)
und die Interpolationspolynome lassen sich aus
KJ
J1N
1JK xx
xxL
KJ−−
∏=+
=≠
(4.1-2)
berechnen.
Beispiel 1Als erstes Beispiel betrachten wir das in Bild 4.1-2 gezeigte 2-Knotenelement.
ξ1 1= − ξ 2 1=
1 2ξ
1 1 2 1
Mit N+1=2 ergibt sich aus Gleichung (4.1-2)
)1(21
111
L21
21 ξ−=
−−−ξ
=ξ−ξξ−ξ
=
( )( ) )1(
21
111
L12
12 ξ+=
−−−−ξ
=ξ−ξ
ξ−ξ=
Bild 4.1-2 2-Knoten Element

4.1. Lagrangesche Polynome für C0 stetige Elemente 103
Beispiel 2Als zweites Beispiel sei das im Bild dargestellte Element mit 3 Knoten betrachtet.
ξ1 1= −
1 2ξ
ξ 2 0= ξ 3 1=
3
1 12 0 3 1
Hier ist N+1=3 und man erhält aus Gleichung (4.1-2)
( )( )( )( )
( )( )( )( ) ( )ξ−ξ−=
−−−−−ξ−ξ
=ξ−ξξ−ξ
ξ−ξξ−ξ= 1
21
110110
L3121
321
( )( )( )( )
( )[ ]( )( )[ ]( )
2
3212
312 1
101011
L ξ−=−−−−ξ−−ξ
=ξ−ξξ−ξ
ξ−ξξ−ξ=
( )( )( )( )
( )[ ]( )( )[ ]( ) ( )ξ+ξ=
−−−−ξ−−ξ
=ξ−ξξ−ξ
ξ−ξξ−ξ= 1
21
011101
L2313
213
Bild 4.1-3 3-Knoten Element

104 4. Interpolationsfunktionen als Ansatzfunktionen
4.2. Hermitesche Polynome für C1 stetige Elemente
Wenn im eindimensionalen Fall an N+1 Stützstellen die Funktionswerte Ky und dieersten Ableitungen Ky′ gegeben sind, kann eine Interpolationsfunktion (2N+1)-tenGrades so konstruiert werden, daß die Funktion genau durch die N+1 gegebenenFunktionswerte Ky , Ky′ verläuft. Eine derartige Funktion nennt man Hermitesche In-terpolationsfunktion (siehe Bild 4.2-1).
Die Interpolationsfunktion kann in folgender Form angegeben werden
( ) ( ) ( ) ( )( ) ( ) ( ) 1N1N2211
1N1N22111N2
yxKyxKyxK
yxHyxHyxH)x(Pxy
++
+++
′++′+′+++++==
K
K (4.2-1)
mit
dxdy
y =′
und
( )
≠=
=JIfür0JIfür1
xH IJ und ( ) 0xK IJ = für alle I=1,...,N+1
( ) 0xH IJ =′ für alle I=1,...,N+1 und ( )
≠=
=′JIfür0JIfür1
xK IJ
Die HI und KI berechnen sich aus
( )[ ] ( )( ) ( )
−
ω′ω′′
−= ΙΙ
ΙΙΙ xx
xx
1xL)x(HN
N2 (4.2-2a)
( )[ ] ( )ΙΙΙ −= xxxL)x(K 2 (4.2-2b)
mit( )( ) ( )1N21 xxxxxx +−−−=ω K (4.2-2c)
Bild 4.2-1 Hermitesche Interpolationsfunktion
x
y'K
y
yK
xxKxN+1x1

4.2 HERMITEsche Polynome für C1 stetige Elemente 105
Beispiel 1Als Beispiel betrachten wir wieder ein 2-Knoten Element (siehe Bild 4.2-2).
11 −=ξ 12 =ξ
1 2ξ
11 12
Die Hermiteschen Interpolationspolynome lauten dann
( ) ( )ξ+ξ−= 2141
H 21
( ) ( )ξ−ξ+= 2141
H 22
( )( )ξ−ξ−= 1141
K 21
( )( )ξ+ξ−−= 1141
K 22
Bild 4.2-2 2-Knoten Element

106 4. Interpolationsfunktionen als Ansatzfunktionen
4.3. Legendresche Polynome für p-Elemente
Im Zusammenhang mit der Entwicklung von p-adaptiven finiten Elemente - das sindElemente, bei denen die Steigerung der Genauigkeit durch sukzessive Erhöhung desPolynomgrades im Element erreicht wird - werden häufig Legendresche Polynome be-nutzt. Die Legendreschen Polynome haben den Vorteil, ein Orthogonalsystem zu bil-den, eine Tatsache die sich vorteilhaft auf die Steifigkeitsmatrix und deren Aufbauauswirkt (Kondition, hierarchischer Aufbau). Legendresche Polynome haben die Form
n2n
n
nn )1x(dxd
21
)x(P −= (4.3-1)
Zur Konstruktion von Ansatzfunktionen werden meist die normierten Integrale vonPn(x) benutzt, die sich folgendermaßen berechnen lassen:1
∫ξ
−=−
−=ξφ
1x1nn dx)x(P
21n2
)( (4.3-2)
Daraus ergeben sich beispielsweise
)34510563(22961
)(
)3107(18161
)(
)165(14161
)(
)(1041
)(
)1(641
)(
2566
355
244
33
22
−ξ+ξ−ξ=ξφ
ξ+ξ−ξ=ξφ
+ξ−ξ=ξφ
ξ−ξ=ξφ
−ξ=ξφ
Diese Legendreschen Polynome haben folgende Eigenschaften:
0)1()1( nn =+φ=−φ für n=2,3,... (4.3-3)
∫−
=≠
=ξξ
φξ
φ1
1
nm
nmfür1nmfür0
dd
dd
d (4.3-4)
1 Siehe dazu beispielsweise B. A. Szabo, I. Babuska: Finite-Element-Analysis, J. Wiley & Sons, 1991.

4.4. Konstruktion von Ansatzfunktionen für finite Elemente 107
4.4. Konstruktion von Ansatzfunktionen für finite Elemente
Nachfolgend sollen exemplarisch an hand von für 2D finiten Elementen gezeigt wer-den wie mit Hilfe von Interpolationsfunktionen Ansatzfunktionen konstruiert werdenkönnen. Ein Übertragung auf andere Modellklassen (z.B. 3D Elemente) ist offensicht-lich und soll hier nicht im Detail dargestellt werden. Als typische Demonstrationsbei-spiele wollen wir hier LAGRANGEsche Elemente, SERENDIPITY Elemente undHERMITEsche Elemente behandeln.und uns dabei jeweils auf rechteckige Element-geometrie beschränken.
Lagrangesche RechteckelementeDas Bild 4.4-1 zeigt ein allgemeines Rechteckelement mit M Knoten in ξ-Richtung
und mit N Knoten in η-Richtung.Es kann also in jeder Richtungein Verschiebungsansatz mit ei-nem Polynom M-ter bzw N-terOrdnung in ξ-Rchtung bzw. inη-Richtung. Durch Multiplikati-on der eindimensionalen Ansatz-funktion (Lagrangesche Polyno-me) lassen sich die Ansatzfunk-tionen für einen beliebigen Kno-ten L= (I,J) ermitteln. Man erhält
)(L)(L),(N )N(J
)M(IL ηξ=ηξ , (4.4-1)
wobei die Lagrangeschen Polynome in Abschnitt 4.1. angegeben sind. Als ein Beispielbetrachten wir das Rechteckelement mit 9 Knotenpunkten (siehe Bild 4.4-2).
1 2 3
4
567
8 92
2
Die Formfunktionen lassen sich zu
(I,J)
(1,1) (M+1,1)
(1,N+1) (M+1,N+1)-
Bild 4.4-1 Lagrangesche Elemente
Bild 4.4-2 Rechteckelement mit 9-Knoten

108 4. Interpolationsfunktionen als Ansatzfunktionen
( ) )1(21
)][1(21
[,N1 η−η−ξ−ξ−=ηξ
( ) )]1(21
][1[,N 22 η−η−ξ−=ηξ
M( ) )1)(1(,N 22
9 η−ξ−=ηξ
ermitteln.2 Die Ableitung beliebiger weiterer Langrangescher Elemente folgt demgleichen Schema.
Serendipity-Elemente3
Wir haben gesehen, daß bei der Entwicklung Lagrangescher Elemente mit höhererAnsatzordnungen viele zusätzliche Knoten im Inneren eines Elementes generiert wer-den. Diese können zwar wieder kondensiert werden, es bleibt aber die Frage, ob mannicht Elemente entwickeln kann, die von Anfang an nur Knotenpunkte auf den Kanten(im 3D Fall nur auf der Oberfläche) der Elemente haben. Die Familie der Serendipity-Elemente4 erfüllt diese Forderung. Die Serendipity-Elemente sind quasi LagrangescheElemente ohne innere Knotenpunkte. Das Bild 4.4-3 zeigt einige typische 2D Seren-dipity-Elemente. Das bekannteste und auch am meisten benutzte Element ist das inBild 4.4-3a gezeigte 8-Knotenelement.5 Die Konstruktion der Ansatzfunktionen wirdfolgendermaßen vorgenommen.
Ausgangsbasis sind die 1D-Lagrangeschen Ansatzfunktionen )(LM ξ bzw )(LN η längsder Seitenkanten, wobei I einen beliebigen Knotenpunkt auf einer Seite η=konstant 2 Der Knoten 9 des Elementes hat keine Verbindung mit anderen Elementen; er ist also elementlokal. Die zu die-sem Knoten gehörenden Gleichungen können daher bereits aus der Elementsteifigkeitsbeziehung eliminiert wer-den (man spricht in diesem Zusammenhang auch vom Kondensieren der inneren Knoten). Wir wollen nachfol-gend dieses Kondensieren innerer Knoten durchführen und nehmen dazu ohne Einschränkung der Allgemeinheitan, daß die inneren Knoten die höchsten Knotennummern haben und daher die dazugehörigen Gleichungen amEnde der Elementsteifigkeitsbeziehung stehen.
=
=
L
E
L
E
LLTEL
ELEE
9
8
1
99
8988
191811
.symff
vv
KKKK
vv
v
KKK
KKKMMMO
L
Die lokalen Freiheitsgrade können nun eliminiert werden. Aus der zweiten Gleichung folgt)( E
TELL
1LLL vKfKv −= − . Einsetzen in die erste Gleichung liefert: EE
TELL
1LLELEEE )( fvKfKKvK =−+ − und
daraus ergibt sich die reduzierte Steifigkeitsbeziehung EEEEˆˆ fvK = mit: T
EL1
LLELEEEEˆ KKKKK ⋅⋅−= − und
L1
LLELLEˆ fKKff −⋅−= , die in unserem konkreten Fall nur noch vom Format (8×8) ist.
3 Die Entwicklung dieser Elemente geht maßgeblich auf B. M. IRONS zurück: Ergatoudis, J. G., Irons, B. M., Zi-enkiewicz, O. C.: Curved isoparametric, quadrilateral elements for finite element analysis. Int. J. Solids andStructures, 4, 1968, pp. 31-424 Der Name Serendipity-Elemente geht auf eine Geschichte von Horaze Walpole, einem englischen Schriftstellerdes 19. Jahrhundert zurück. In der märchenhaften Geschichte Die drei Prinzen von Serendip haben diese dreiPrinzen (man beachte die Anzahl der Autoren der vorstehenden Veröffentlichung) die Gabe, durch überraschen-de Einfälle das Schicksal zu wenden. Der Bezug dieser Bezeichnung einer Familie von finiten Elementen, dieschnell sehr populär wurde, zu der Geschichte von Walpole war lange Zeit unbekannt.5 Das 3D-Pendant ist das 20 Knoten Hexaederelement, daß beispielsweise auch in COSAR das Standardelementfür 3D Berechnungen verwendet wird.

4.4. Konstruktion von Ansatzfunktionen für finite Elemente 109
und J einen Knotenpunkt auf einer Seite ξ=konstant beschreibt. Diese Ansatzfunktio-nen werden in der Richtung senkrecht zur Seitenkante mit einer linearen Ansatzfunkti-on verknüpft, so daß sich folgende Formfunktionen ergeben
)(L)1(21
),(N
)1(21
)(L),(N
)N(JJJ
I)M(
II
ηξξ+=ηξ
ηη+ξ=ηξ (4.4-1)
Damit sind die Formfunktionen für alle Randknoten bis auf die 4 Eckknoten bereitsbekannt. Eine lineare Ansatzfunktion in der Richtung senkrecht zur Seitenkante kannhier gewählt werden, weil im Elementinneren kein Knoten vorhanden ist. Für die Er-mittlung der Ansatzfunktionen der 4 Eckknoten gehen wir von den bilinearen Ansatz-funktionen aus, die wir schon von dem 4-Knoten Rechteckelement kennen (siehe Ab-schnitt 3.6). Natürlich sind diese Funktionen auf den beiden Seitenkanten, die zu demjeweiligen Eckknoten gehören nicht Null (sondern nur an den beiden Knoten, die dieSeitenkante begrenzen). Wir können aber diese Formfunktionen an allen Knoten aufden angrenzenden Seitenkanten zu Null machen, indem wir gewichtete Formfunktio-nen der jeweiligen Knoten auf den Seitenkanten nach Gleichung (4.4-1) subtrahieren.Das jeweilige Gewicht ergibt sich aus der Größe der linearen Funktion an dem betref-fenden Seitenknoten. Wir erhalten dann
∑∑==
ηη+ηξ−ηξξξ+−
−ηη+ξξ+=ηξ
N
2JILJ
M
2IIIL
LLL
)1(21
),(N),(N)1(21
)1)(1(41
),(N (4.4-2)
L=1,2,3,4
Dabei sind M+1 und N+1 die Anzahl der Knoten auf den Seitenkanten η=konstantbzw ξ=konstant, die an den Ecknoten L angrenzen.
Ein Beispiel soll das nachfolgend verdeutlichen.
1 2 3
1ξ2ξ
4
567
8
3
12
567
8
1 2 3
1ξ2ξ
4
5
6789
10
3
12
5
6789
10
1 2 3
1ξ2ξ
4
5
6
78910
11
12
3
12
5
6
78910
a) 8-Knoten Element b) 10-Knoten Element c) 12-Knoten Element
Bild 4.4-3 Einige 2D-Serendipity-Elemente ( η≡ξξ≡ξ 21 , )

110 4. Interpolationsfunktionen als Ansatzfunktionen
Beispiel 1Wir betrachten das Beispiel in Bild 4.4-3c, und schreiben die Formfunktion für denKnoten 2, einem der Knoten auf den vier Seitenkanten, auf:
)]1()][31)(1([),(N 212
169
2 η−ξ−ξ−=ηξ
Analog ergeben sich die Formfuktionen 108753 N,N,N,N,N für die Knoten 3, 4, 5, 7,8, 10. Wir entwickeln jetzt die Formfunktionen für den Eckknoten 1, an den die beidenSeitenkanten mit den Knoten I=2,3 und J=10 angrenzen. Damit ergibt sich aus Glei-chung (4.4-2)
10321 N21
N31
N32
)1)(1(41
),(N −−−η−ξ−=ηξ
Analog lassen sich die Formfunktionen 964 N,N,N für die übrigen Eckknoten 4, 6, 7entwickeln Die Addition aller 10 Formfunktionen liefert wieder 1, wie man sofortsieht, da die Formfunktionen auf den Seitenkanten jeweils dreimal auftreten und zwarmit den Gewichten +1, - z
1z− und - z1 und damit in der Summe Null ergeben. Die Sum-
me der noch verbleibenden 4 bilinearen Formfunktionen der Eckknoten liefert 1, wiewir bereits im Abschnitt 3.6 gesehen haben.

5.1. Iso-, sub- und superparametrische finite Elemente 111
5. Das isoparametrische Elementkonzept
5.1. Iso-, sub und superparametrische finite Elemente
Bisher haben wir nur Elemente mit geraden Seitenkanten und ebenen Seitenflächenbetrachtet, wobei die Kanten bzw. Flächen auch noch parallel zu den globalen kartesi-schen Koordinatenachsen lagen (siehe Abschnitt 3). Nachfolgend sollen Möglichkei-ten zur Ableitung von finiten Elementen betrachtet werden, bei denen diese Bedingun-gen nicht mehr erfüllt zu sein brauchen. Diese Elemente sollen also verzerrt sein kön-nen und/oder auch gekrümmte Seitenkanten bzw. -flächen aufweisen können. Für diegeometrische Beschreibung derartiger Elementformen stehen vielfältige mathemati-sche Möglichkeiten zur Verfügung. Randkonturen und Randflächen eines Elementeskönnen als Kreisbögen, Teile von Ellipsen, Hyperbeln, Zylinderflächen oder anderebekannte geometrische Funktionen beschrieben werden, wobei die notwendigen Para-meter zur Beschreibung der Geometrie als Eingabedaten bereitgestellt werden müssen.Mit einer solchen mathematischen Beschreibung können die Koordinaten für jedenPunkt P im Element (xP, yP, zP) durch die Eingabegrößen, die die Geometrie festlegen,dargestellt werden in der Form
a?x )z,y,x(zyx
=
= (5.1-1)
Diese Geometriegrößen (z.B. Radius, Koordinaten von Punkten u.ä.) sollen im Vektora zusammengefaßt sein. Eine einfache Möglichkeit einer derartigen Geometriebe-schreibung besteht darin, nur die Koordinaten von Punkten im Element zu benutzenund Ψ(x,y,z) mit Hilfe von Lagrangeschen Interpolationspolynomen auszudrücken.Man erhält dann
==
=
N
N
N
L
L
L
1
1
1
zyx
zyx
zyx
)z,y,x()z,y,x(zyx
M
M
?y?x , (5.1-2)
wobei in dem Vektor y genau die Koordinaten der Punkte stehen, die für die Geome-trieapproximation benutzt werden. Wenn man bei Lagrangeschen Elementen diejeni-gen Knotenpunkte für die Geometrieapproximation verwendet, die auch für die Ap-

5. Das isoparametrische Elementkonzept 112
proximation des Verschiebungszustandes benutzt werden, erhält man sogenannte iso-parametrische Elemente mit ΨL(x,y,z)=NL(x,y,z). Es werden also dieselben Funktio-nen sowohl für die Approximation der Geometrie des Elementes als auch den Ver-schiebungszustand im Element verwendet. Es gilt also
⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅
==
NL1
NL1
NL1
NNNNNN
NNN)z,y,x()z,y,x( LLN? (5.1-3)
Natürlich können auch weniger oder mehr Knoten zur Geometriebeschreibung genutztwerden, wobei man dann von subparametrischen bzw. superparametrischen Elemen-ten spricht, d.h.
>=<
=ΨischerparametrsupNM
rischisoparametNMrischsubparametNM
M,...,1Lmit)z,y,x(L (5.1-4)
Mit N wird die Anzahl der Knotenpunkte für die Verschiebungsapproximation be-zeichnet. Natürlich sind auch völlig andere Methoden der Geometriebeschreibungverwendbar wie wir bereits oben erwähnt habe. Die isoparametrischen Elemente sindvor allem deshalb so populär, weil die bereits verfügbaren Elementknotenpunkte unddie Formfunktionen für die Verschiebungen gleich auch für die Geometrieapproxima-tion mitbenutzt werden können. Wir werden nachfolgen die sich daraus ergebendenKonsequenzen für isoparametrischen Elemente näher untersuchen.

5.2. Isoparametrische finite Elemente 113
5.2. Isoparametrische finite Elemente Die nachfolgenden Betrachtungen beziehen sich der Einfachheit halber und ohne Ein-schränkung der Allgemeinheit auf 2D-Elemente. Im Bild 5.2-1 ist ein isoparametri-
sches Element mit 4 Knoten abgebildet. Wenn nur die Knotenpunkte zur Geometriebe-schreibung benutzt werden, hat das Element gerade Seitenkanten. Das Element kannmit Hilfe der Formfunktionen nach Gleichung (3.6-1) geometrisch beschrieben wer-den, wenn die Knotenkoordinaten (xL,yL) der 4 Eckknoten L=1,...,N mit N=4 bekanntsind. In Analogie zu Gleichung (3.6-4) ergibt sich
∑
∑
=
=
ηξ=
ηξ=
N
1LLL
N
1LLL
y),(Ny
x),(Nx (5.2-1)
bzw. in Matrizenschreibweise
⋅⋅⋅
⋅⋅⋅=ηξ=
=
N
N
L
L
1
1
NL1
NL1
yx
yx
yx
NNNNNN
),(yx
M
M
LLLL
yNx (5.2-2)
Ganz analog läßt sich die geometrische Form eines Rechteckelementes mit N=8 Kno-ten beschreiben (siehe Bild 5.2-2). Die Ansatzfunktionen sind jetzt quadratisch undermöglichen damit die Beschreibung einer Seitenkante in Form einer Parabel. Derarti-ge Elemente können damit beispielsweise ein Kreissegment nur annähern, da die
Bild 5.2-1 Isoparametrisches Rechteckelement mit 4 Knotena) Darstellung in kartesischen Koordinatenb) Darstellung in lokalen Koordinaten
a) b)x
y
12
3
4
2
34
1

5. Das isoparametrische Elementkonzept 114
Randbeschreibung nicht auf einer exakten Kreisgeometrie basiert.1 Wir müssen uns al-so bei den isoparametrischen Elementen darüber im Klaren sein, daß diese Elementegekrümmte Randkonturen oder Randflächen nur durch Polynome annähern. Es wird
also unter Umständen durch die isoparametrische Geometrieapproximation ein zusätz-licher Fehler in die Rechnung eingeführt, der durch eine ausreichende Netzverfeine-rung wieder verringert werden kann.
Sieht man sich die Gleichungen (5.2-1) an und beachtet die Form der Ansatz-funktionen (siehe Abschnitt 3), erkennt man, daß diese Gleichungen nichtlinear sindund daher nicht formelmäßig nach ξ und η aufgelöst werden können (das war nur beidem Sonderfall möglich, bei dem die Elementkanten parallel zu den kartesischen Ko-ordinatenachsen lagen, wie wir z.B. in Abschnitt 3.6 gesehen haben. Damit lassen sichdie Ableitung nach den globalen kartesischen Koordinaten nicht mehr so einfach durchdie Ableitungen nach den lokalen Koordinaten ersetzen. Der Zusammenhang in Glei-chung (3.6-8), der die Berechnung von R verlangt, kann jetzt nicht mehr direkt ange-geben werden. Wir müssen diese Transformation jetzt mit Hilfe der Inversen derJACOBIschen Matrix erledigen und erhalten R=J-1. Wir geben die Jacobische Matrixfür den 2D Fall nachfolgend nochmals an. Die Ableitungen nach den lokalen Koordi-naten lassen durch
1 Um ein Kreisbogensegment mit diesen Elementen ausreichend genau zu approximieren, sollte der Seitenmit-tenknoten so gelegt werden, daß er den Winkel von den Eckknoten zum Kreismittelpunkt halbiert (siehe linkesBild).
22
Mittelpunkt liegt auf derWinkelhalbierenden
Falls der Mittelpunkt zwar auf dem Kreisbogen liegt,nicht aber auf der Winkelhalbierenden, wird bei derGeometrieapproximation zusätzlich ein großer Fehlerbegangen. Auf dem rechten Bild ist ein derartiger Fallskizziert. 2
2
Mittelpunkt liegt nicht aufder Winkelhalbierenden
a) b)x
y
1 23
4
2 3
5
1
5
67
867
8 4
Bild 5.2-2 Isoparametrisches Rechteckelement mit 8 Knotenc) Darstellung in kartesischen Koordinatend) Darstellung in lokalen Koordinaten

5.2. Isoparametrische finite Elemente 115
∂∂
∂∂
η∂∂
η∂∂
ξ∂∂
ξ∂∂
=
η∂∂ξ∂
∂
y
xyx
yx
(5.2-3)
mit der Jacobischen Matrix
∂η∂
∂η∂
ξ∂∂
ξ∂∂
=
=
yx
yx
JJJJ
2221
1211J (5.2-4)
ausdrücken. Die Ableitungen in Gleichung (5.2-4) lassen mit Hilfe des Ansatzes Glei-chung (5.2-1) berechnen und man erhält
L
N
1LLL
N
1L
L22
L
N
1LLL
N
1L
L21
L
N
1LLL
N
1L
L12
L
N
1LLL
N
1L
L11
yByNy
J
xBxNx
J
yByNy
J
xBxNx
J
∑∑
∑∑
∑∑
∑∑
=η
=
=η
=
=ξ
=
=ξ
=
=η∂
∂=
η∂∂
=
=η∂
∂=
η∂∂
=
=ξ∂
∂=
ξ∂∂
=
=ξ∂
∂=
ξ∂∂
=
(5.2-5)
wobei sich BξL und BηL nach Gleichung (5.2-13) berechnen lassen. Damit ergibt sich
∑= ηη
ξξ
=
N
1L LLLL
LLLL
yBxByBxB
J (5.2-6)
Die Ableitung nach den globalen kartesischen Koordinaten ergibt sich jetzt aus
η∂∂ξ∂
∂
=
η∂∂ξ∂
∂
=∂∂
=
∂∂
∂∂
=∂∂ −1
y
x JR?
Rx
(5.2-7)
mit
−
−=
== −
1121
1222
2221
12111
JJJJ
det1
RRRR
JJR (5.2-8)
und
21122211 JJJJdet −=J .

5. Das isoparametrische Elementkonzept 116
Damit kann jetzt die Matrix B berechnet werden, die wir für die Berechnung der Stei-figkeitsmatrix benötigen. Wir transformieren zuerst die Matrix der Ableitungen D(Gleichung (2.1-3)) und erhalten
η∂∂
+ξ∂
∂η∂∂
+ξ∂
∂η∂∂
+ξ∂
∂η∂∂
+ξ∂
∂
=
∂∂
∂∂
∂∂
∂∂
=
12112221
2221
1211
RRRR
RR0
0)RR(
xy
y0
0x
D (5.2-9)
Anwenden von D auf die Matrix der Formfunktionen N liefert B
[ ]NL),(),( BBBDNB LL=ηξ=ηξ (5.2-10)mit
=
xLyL
yL
xL
L
BBB0
0BB (5.2-11)
und
L22L21yL
L12L11xL
BRBRB
BRBRB
ηξ
ηξ
+=
+= (5.2-12)
sowie
η∂∂
=
ξ∂∂
=
η
ξ
LL
LL
NB
NB
(5.2-13)
Damit kann die Steifigkeitsmatrix K berechnet werden und man erhält
ηξηξ== ∫ ∫ ∫− −
dddet),(hdV T
V
1
1
1
1
T JEBBEBBK (5.2-14)
Die Berechnung der Steifigkeitsmatrix und der Kraftvektoren erfolgt mittels numeri-scher Integration, wobei dazu zweckmäßigerweise die Gaußschen Quadraturformelngenutzt werden.2
2 Siehe dazu die Vorlesung MNMM II.

6.2. Die statische Kondensation 117
6. Substruktur-Superelementtechnik6.1. Motivation und ZielstellungWir hatten schon im Abschnitt 4.4. erwähnt, daß man innere Freiheitsgrades eines fi-niten Elementes – das sind diejenigen Freiheitsgrade, die nur mit Freiheitsgraden desjeweiligen Elementes selbst verknüpft sind - bereits in dem Elementgleichungssystemeliminieren kann. Nach dieser Elimination bleibt ein reduziertes Gleichungssystem(statisch kondensiertes Gleichungssystem) übrig, das nur noch Freiheitsgrade an denäußeren Knoten enthält. Durch die Kondensation wird die Anzahl der Unbekannten indem Gesamtgleichungssystem reduziert.
Die Anwendung dieser Technik auf komplexe Strukturen (z.B. komplette Ma-schinen, Fahrzeuge, Brücken, Schiffe u.ä.) führt zur sogenannten Substruktur-Superelementtechnik. In jeder Substruktur, die einen Teil der Gesamtstruktur darstellt,lassen sich innere Freiheitsgrade eliminieren, so daß nach ausgeführter Kondensationnur noch die Freiheitsgrade an den Knotenpunkten übrigbleiben, über die die Sub-struktur mit anderen Substrukturen verbunden ist. Dadurch erzielt man eine beträchtli-che Reduktion der Anzahl der Unbekannten in der sogenannten Hyperstruktur, die ausden einzelnen kondensierten Substrukturgleichungssystemen besteht. Der besondereVorteil liegt aber darin, daß die Bandweite meist drastisch reduziert wird. Daraus er-gibt sich eine erhebliche Einsparung an Speicherplatz und Rechenzeit, wodurch einkomplexes Problem oft erst lösbar wird. Weitere Vorteile dieser Technik sind am Endedes Abschnitts 6.2 zusammengestellt.
6.2. Die statische KondensationIn diesem Abschnitt wollen wir zunächst die Substrukturtechnik auf statische Proble-me anwenden.
externe Knoten
lokale Knoten
Bei komplexen und großen Strukturen ist es oft vorteilhaft, diese in mehrere einfache-re Teilstrukturen, die sogenannten Substrukturen, zu zerlegen (siehe Bild 6.2-1). DieKnoten, an denen die Substrukturen gekoppelt sind, nennt man externe Knoten. Dieübrigen Knoten bezeichnet man als lokale Knoten. Diese lokalen Knoten können ausdem jeweiligen Substrukturgleichungssystem eleminiert werden, da sie mit keiner an-deren Substruktur zusammenhängen. Natürlich muß an den Kontaktstellen jede derbeteiligten Substrukturen eine identische Vernetzung aufweisen. Die Knoten müssen
Bild 6.2-1 Zerlegung einer Struktur in 4 Substrukturen

118 6 Substruktur-Superelementtechnik
identisch sein (d.h. eine gleiche Lage im Raum haben) und auch zu Elementkanten undElementflächen mit identischen Ansatzfunktionen gehören. Auf der Kontaktzone muß(wie sonst überall im Netz auch) eine kompatible Vernetzung vorliegen.1
Ohne Einschränkung der Allgemeingültigkeit wollen wir annehmen, daß die lo-kalen Knoten zuerst numeriert werden, wodurch die externen Knoten die höchstenNummern aufweisen. Das Gleichungssystem kann damit in der Form
=
E
L
E
L
EETLE
LELL
ff
vv
KKKK
(6.2-1)
geschrieben werden, wobei der Index L auf die lokalen und der Index E auf die exter-nen (globalen) Freiheitsgrade verweist. Wie wir bereits gezeigt haben, können die lo-kalen Freiheitsgrade eliminiert werden. Aus der ersten Gleichung von (6.2-1) erhältman )( ELEL
1LLL vKfKv −= − . (6.2-2)
Die Submatrix KLL ist positiv definit,2 so daß ein Auflösen dieses Gleichungssystemsstets möglich ist. Einsetzen in die erste Gleichung liefert
EELEL1
LLTLEEEE )( fvKfKKvK =−+ − , (6.2-3)
und daraus ergibt sich die reduzierte Steifigkeitsbeziehung
EEEEˆˆ fvK = , (6.2-4)
die die Steifigkeitsbeziehung des sogenannten Superelementes bezeichnet, das aus derSubstruktur hervorgegangen ist. Die Koeffizientenmatrix des Gleichungssystems
LE1
LLTLEEEEE
ˆ KKKKK ⋅−= − (6.2-5)
bezeichnet man als Superelementsteifigkeitsmatrix, und den Vektor der rechten Seite
L1
LLTLELE
ˆ fKKff −−= . (6.2-6)
bezeichnet man als Superelementkraftvektor.3
1 Über Möglichkeit der Verknüpfung von Strukturen, die auf den Kontaktbereichen unterschiedlich vernetzt sind,werden wir in einem späteren Abschnitt eingehen.2 Das gilt immer dann, wenn die Anzahl der externen Knoten der Substruktur so groß ist, daß durch Randbedin-gungen an diesen Knoten eine Starrkörperbewegung der Substruktur verhindert werden kann.3 Natürlich wird die Berechnung nicht so ausgeführt wie sie formal korrekt oben angegeben ist, sondern erfolgteffektiver in der untenstehenden Form.
Dreieckszerlegung LLT
LLLL RRK =
Zwischenbetrachtung ])[(])[()(ˆLE
T1LL
TLE
T1LLEELE
T1LL
1LL
TLEEEEE KRKRKKRRKKK −−−− −=⋅−=
Es wird die Abkürzung: LET1
LLLE )( KRZ −=
eingeführt und ZLE aus LELET KZR =
durch Vorwärtseinsetzen ermittelt.
Jetzt kann EEK̂ aus LETLEEEEE
ˆ ZZKK −=berechnet werden. Dann wird zunächst zL aus
LLTLL fzR =
berechnet und dann LTLEEE fˆ zZf −= berechnet.

6.2. Die statische Kondensation 119
Als wesentlichen Vorteile der Substrukturtechnik sind zu nennen:
• Erhebliche Einsparung an Rechenzeit und an Speicherplatzbedarf bei einer direktenLösung des Gleichungssystems infolge der meist deutlich geringeren Bandweiteder lokalen Substruktursteifigkeitsmatrizen KLL im Vergleich zur Gesamtsteifig-keitsmatrix ohne Anwendung der Substrukturtechnik.4
• Weitere Einsparung an Rechenzeit und Speicherplatzbedarf, wenn mehrere Sub-strukturen identisch sind und damit nur einmal aufgebaut und auf die externenFreiheitsgrade kondensiert zu werden brauchen.
• Erhebliche weitere Einsparungen von Rechenzeit sind möglich, wenn bei nichtli-nearen Rechnungen die Nichtlinearitäten (z.B. nichtlineares Materialverhalten) aufwenige Substrukturen beschränkt sind. Nur diese Substrukturen brauchen dann z.B.während einer inkrementell-iterativen Lösungstechnik in jedem Iterationsschrittneu aufgebaut, faktorisiert und mit den restlichen (linearen) Superelementen zurHyperstruktur verbunden werden. Das Hyperstrukturgleichungssystem muß natür-lich in jedem dieser Schritte komplett neu gelöst werden.
• Ein analoges Einsparungspotential ergibt sich bei Optimierungsrechnungen, wenndie z.B. zu optimierende Geometrie5 nur einen kleinen Teil des Gesamtproblemsumfaßt und auf eine oder wenige Substrukturen beschränkt ist. Das gilt natürlichauch für Variantenrechnungen, bei denen jeweils nur einige wenige Teilstrukturenmodifiziert werden.
• Die Substrukturtechnik ist eine sehr gute Ausgangsbasis für eine parallele Abar-beitung des Gesamtproblems, z.B. auf Parallelrechenern, Transputersystemen oderRechnerclustern.
• Natürlich ergeben sich auch gravierende Vereinfachungen bei der Modellaufberei-tung (Netzgenerierung getrennt für jede Substruktur, Arbeitsteilung bei komplexenStrukturen u.ä.)
Als ein wesentlicher Nachteil ist ein erhöhter Aufwand für die Softwareentwicklungzu nennen. Teilweise kann die Substrukturtechnik infolge des unvermeidbaren Zu-satzaufwandes bei der Problemlösung in Sonderfällen auch zu einer zu Erhöhung derRechenzeit führen.
4 Nur wenn eine deutliche Verringerung der Bandweite eintritt, ist die Anwendung der Substrukturtechnik ge-rechtfertigt.
Bei einer Ringstruktur kann man beispielsweise durch Auftrennen des Ringes und Deklarierung allerKnoten auf der Schnittfläche zu externen Knoten eine drastische Reduktion der Bandweite erreichen, die zu ei-ner erheblichen Reduktion des Speicherplatzbedarfs (bei Abspeicherung als Bandmatrix) und der Rechenzeit (di-rekter Gleichungslöser) führt.
HyperstrukturSubstruktur
externe Knoten
5 Hier ist eine Formoptimierung (englisch: shape optimization) gemeint.

120 6 Substruktur-Superelementtechnik
6.3. Anwendung auf dynamische Probleme - die Gyan-Reduktion
Eine exakte Kondensation von inneren Freiheitsgraden in der im Abschnitt 6.2 ange-gebenen Form ist bei dynamischen Problemen nicht möglich. Wegen des wesentlichhöheren numerischen Aufwandes, den z.B. die Zeitintegration eines sehr großen Sy-stems von gewöhnlichen Differentialgleichungen zweiter Ordnung (semidiskrete Formder Bewegungsdifferentialgleichungen, siehe Gleichung (2.4-24)) oder die Lösung ei-nes großen Eigenwertproblems (Gleichung (2.4-27) im Vergleich zur Lösung einesgleich großen linearen Gleichungssystems erfordert, ist hier die Reduktion von Frei-heitsgrade besonders wichtig, um überhaupt eine Lösung mit vertretbarem Aufwandzu erhalten.6 Zur näherungsweisen Lösung des Problems der Freiheitsgradreduktiongibt es verschiedenen Möglichkeiten.
Wir wollen nachfolgend das bekannteste Verfahren, die sogenannte GYAN-Reduktion, darstellen, das die Kondensation von inneren Freiheitsgraden bei Eigen-wertproblemen ermöglicht. Wir betrachten dazu das Eigenwertproblem
0vMK =ω− )( 2 (6.3-1)
und schreiben diese Gleichung analog zu Gleichung (6.2-1) getrennt nach den lokalenund externen Freiheitsgraden auf. Wir erhalten
0vv
MMMM
KKKK
=
ω−
E
L
EETLE
LELL2
EETLE
LELL (6.3-2)
Wenn wir aus diesen Gleichungen die inneren Freiheitsgrade eliminieren, erhalten wir
ELE2
LE1
LL2
LLL )()( vMKMKv ω−ω−−= − (6.3-3)
Diese Gleichung ist die exakte Beziehung zwischen den lokalen und den externenFreiheitsgraden, enthält aber die unbekannte Eigenfrequenz ω, die ja erst noch berech-net werden soll. Nach dem auf Gyan zurückgehenden Vorschlag setzt man in (6.3-3)die Eigenfrequenz ω=0 und erhält die schon aus der statischen Kondensation bekannteGleichung
ELE1
LLL vKKv −−= (6.3-4)
Wir können damit den Verschiebungsvektor v folgendermaßen durch die externenFreiheitsgrade vE ausdrücken.
EELE
1LL
E
L vTvI
KKvv
v =
−=
=
−
(6.3-5)
Damit kann das Eigenwertproblem Gleichung (6.3-1) durch Links- und Rechtsmulti-plikation mit T folgendermaßen transformiert werden
0vTMKT =ω− E2T )( (6.3-6)
6 Viele auf den Bewegungsgleichungen aufbauende Verfahren (z.B. die Reglerauslegung zur aktiven Schwin-gungsunterdrückung) erfordern dynamische Minimalmodelle mit wenigen Freiheitsgraden, um das Problemüberhaupt lösen zu können.
6.3 Anwendung auf dynamische Probleme (GYAN-Reduktion) 121
Mit T nach Gleichung (6.3-5) läßt sich die Transformation ausführlich schreiben als
[ ] 0vI
KKMMMM
KKKK
IKK =
−
ω−
−
−−
ELE
1LL
EETLE
LELL2
EETLE
LELLLE
1LL .
Daraus ergibt sich durch Ausmultiplizieren
0vMK =ω− EEE2
EE )ˆˆ( (6.3-7a)
mit
LE1
LLTLEEEEE
ˆ KKKKK ⋅−= − (6.3-7b)und LE
1LLLL
1LL
TLELE
1LL
TLELE
1LL
TLEEEEE
ˆ KKMKKKKMMKKMM −−−− −−−= . (6.3-7c)
Die Formeln (6.3-7) beschreiben die Reduktion von inneren Freiheitsgraden bei einemEigenwertproblem nach der Methode der statischen Kondensation, die auf Gyan zu-rückgeht und daher auch als Gyan-Reduktion bezeichnet wird.
Es stellt sich die Frage, wie stark die so berechnete Lösung durch die Annahmenω=0 beeinflußt wird. Wir wollen daher nachfolgend versuchen, die Frage nach derGenauigkeit der Gyan-Reduktion zu beantworten. Dazu wollen wir den Einfluß derVernachlässigung untersuchen, die wir durch die Nutzung von Gleichung (6.3-4) stattder exakten Gleichung (6.3-3) begangen haben. Wir setzen jetzt also Gleichung (6.3-3)in die zweite Gleichung des Eigenwertproblems (6.3-2) ein und erhalten
0vMKMKMKMK =ω−ω−ω−−ω− −ELE
2LE
1LL
2LLLE
2LEEE
2EE )]())(( (6.3-8)
Wir entwickeln die Inverse 1LL
2LL )( −ω− MK in eine Reihe und erhalten7
K+ω+ω+=ω− −−−−−− 1LL
2LL
1LL
21LLLL
1LL
21LL
1LL
2LL )()()( KMKKMKKMK (6.3-9)
Durch Einsetzen von Gleichung (6.3-9) in (6.3-8) und Ausmultiplizieren erhält mandas Eigenwertproblem der statischen Kondensation in Gleichung (6.3-7) dann, wennman aus Gleichung (6.3-9) nur die ersten beiden Reihenglieder berücksichtigt und alleanderen Terme vernachlässigt. Das ist aber nur dann richtig, wenn das erste vernach-lässigte Reihenglied kleiner ist als die berücksichtigten Reihenglieder. Es sollte also
E1
LLLL1
LL21
LLTEE
1LL
2LL
1LL
2TE )(])[( vKMKKvvKMKv −−−−− ω+<<ω (6.3-10)
gelten. Umformen dieser Ungleichung liefert
0vMKIMKIv >>ω−ω+ −−ELL
1LL
2LL
1LL
2TE )]([ (6.3-11)
7 Für eine Matrix A mit 1)(? <A ( d.h. größter Eigenwert kleiner 1), gilt
kk321 )1()( AAAAIAI −+−+−=+ − K , was man durch Ausmultiplizieren leicht überprüfen kann. Den Aus-
druck 1LL
2LL )( −ω− MK kann man mit dieser Formel folgendermaßen umformen, und man erhält
K
K
+ω+ω+ω+=
+ω+ω+ω+=
ω−=ω−=ω−
−−−−−−−
−−−−
−−−−−−
1LL
3LL
1LL
21LL
2LL
1LL
21LLLL
1LL
21LL
1LL
3LL
1LL
22LL
1LL
2LL
1LL
2
1LL
1LL
1LL
21LL
1LL
2LL
1LL
2LL
)()(
])()([
)()]([)(
KMKKMKKMKK
KMKMKMKI
KMKIMKIKMK

122 6 Substruktur-Superelementtechnik
Da die beiden Matrizen KLL und MLL positiv definit sind, muß mindestens
0vMKIv ≥ω− −ELL
1LL
2TE )( (6.3-12)
gelten. Der Fall, bei dem (6.3-12) erstmals gleich Null wird, ist der kleinste Eigenwertvon
0vMK =ω− ˆ)ˆ( LL2
LL (6.3-12)
Solange die Frequenzen ω des nicht vereinfachten Gesamtsystems kleiner als diekleinste Frequenz ω̂ sind, ist das Produkt 0vMKv >ω− ELL
2LL
TE )( . Es muß also
geltenω>ω̂ (6.3-13)
Für jede Substruktur muß also der kleinste Eigenwert der lokalen Strukturmatrizennach Gleichung (6.3-12) bestimmt werden. Dieser Eigenwert muß größer sein als dergrößte Eigenwert des Gesamtsystems, für den man noch eine Lösung ausrechnenmöchte. Wenn man also alle Substruktureigenwertprobleme S=1,...,NS nach Gleichung(6.3-12) gelöst hat, kennt man den kleinsten Eigenwert minωS. Jetzt kann man das Ei-genwertproblem des nach der Gyan-Reduktion reduzierten Eigenwertproblems lösen.Der dabei noch interessierende größte Eigenwert muß kleiner sein als min ω̂ S. Fallsdiese Bedingung verletzt ist, müssen zusätzliche Knotenpunkte zu externen Knoten-punkten deklariert werden. In der Regel wird es also bei dynamischen Problemen nichtausreichen, nur die Koppelknoten als externe Knoten zu benutzen, sondern es sindmeist zusätzliche innere Knoten erforderlich, um die Bedingung (6.3-13) zu erfüllen.Zusätzliche externe Knoten im Gebietsinneren einer Substruktur versteifen die jetztmit weniger lokalen Knoten diskretisierte Struktur, was einleuchtet, wenn man sichvorstellt, daß alle externen Knoten gefesselt sind. Durch diese Fesselung von Frei-heitsgraden erhöht sich der kleinste Eigenwert, was ja das Ziel des Einbringens zu-sätzlicher externer Knoten ist.