4. herramienta de simulación -...
TRANSCRIPT

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 54
4. Herramienta de simulación
El programa Matlab es una poderosa herramienta matemática orientada a trabajar con vectores y matrices. Usa un lenguaje propio en análisis numérico y tiene su propio compilador. En la última versión se ha mejorado el entorno gráfico relacionado con la orden guide.
El ambiente de desarrollo de interfaz de usuario (guide) contiene un conjunto de herramientas para crear interfaces gráficas muy parecidas al entorno de Windows. Estas herramientas facilitan el proceso de programación y creación.
El entorno guide nos permite crear un conjunto de ventanas que interactúa con el usuario de una forma visual y simple. En un programa como éste donde hay gran cantidad de datos de entrada y salida hace muy intuitivo el manejo del programa.
La gran facilidad para modular el programa, con las correspondientes ventajas a la hora de modificar o ampliar alguna de las partes de éste, junto con la capacidad de interactuar con el usuario, además de la potencia que tiene Matlab para realizar cálculos, es lo que nos ha llevado a realizar el programa bajo este entorno.
4.1 Manual de usuario
Este programa ha sido diseñado como herramienta de simulación de máquinas de inducción en general, y en particular, como aplicación a una instalación eólica tipo.
El usuario puede elegir libremente la configuración, parámetros y modelo de la máquina que desee en cada momento, ejecutar simulaciones, guardar los datos tanto de entrada como de salida de cualquier simulación, obtener y guardar gráficas, etc.
A continuación, describimos detalladamente el funcionamiento de la herramienta.

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 55
• Directorio de trabajo
Para ejecutar correctamente el programa, el directorio de trabajo de Matlab elegido es el siguiente:
[Unidad CD]:\Proyecto Fin Carrera\Programación Matlab
• Presentación del programa
Es la primera ventana que aparece al abrir el programa. Para comenzar con la herramienta de simulación, escribimos en la pantalla de Matlab (Command Window) Software_Simulacion y pulsamos Enter. Nos mostrará la siguiente ventana:
Figura 4.1 Ventana de presentación del programa de simulación
Pulsando en Siguiente, aparece la ventana de Opciones iniciales.

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 56
• Opciones iniciales
Se muestran aquí las tres opciones generales del programa:
1. Nuevo proyecto.
2. Cargar datos de entrada de proyecto archivado: con esta opción se permite al usuario cargar de nuevo todos los datos de entrada de un proyecto archivado anteriormente. De esta manera, si el usuario desea reutilizar esos datos para cambiar sólo algunos de los parámetros y evitar tener que introducirlos todos otra vez. Esta opción es vital para la automatización y rapidez en el trabajo.
3. Comparar dos proyectos gráficamente: los datos de salida de los proyectos realizados se guardan automáticamente en ficheros de datos. Si el usuario desea representar conjuntamente las variables de dos proyectos distintos para compararlos, esta opción se lo permite.
Figura 4.2 Ventana de opciones iniciales

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 57
• Datos de entrada
Se muestran todas las opciones de configuración que ofrece el programa:
Elementos y parámetros de la fuente de alimentación.
Tipo de par.
Parámetros de la máquina elegida para la simulación.
Sistema o marco de referencia escogido para la simulación.
Transferencia de barras.
Parámetros para la simulación/integración.
Modelo de las ecuaciones de la máquina.
Base de datos.
Figura 4.3 Ventana de datos de entrada

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 58
• Fuente de alimentación
Consta de lo siguiente:
Figura 4.4 Ventana de fuente de alimentación
1. Módulos de tensión: módulos de las tensiones fase‐neutro en el punto de conexión a la red (PCR) de alta tensión. Pueden estar equilibrados o desequilibrados.

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 59
2. Impedancia Thévenin en el PCR: se refiere a la impedancia equivalente Thévenin de la red de AT en el punto de conexión del parque. Ofrece la opción de introducir la impedancia en coordenadas rectangulares o polares.
Figura 4.5 Ventana de impedancia Thévenin de la red
HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 60
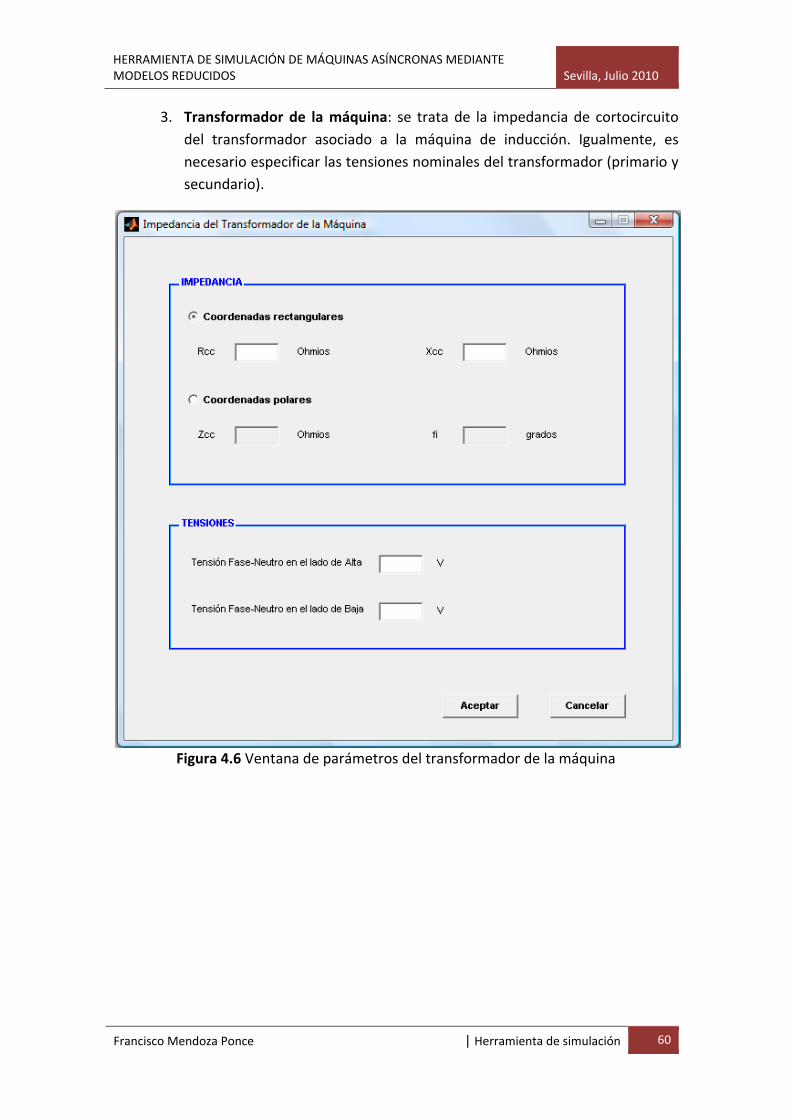
3. Transformador de la máquina: se trata de la impedancia de cortocircuito del transformador asociado a la máquina de inducción. Igualmente, es necesario especificar las tensiones nominales del transformador (primario y secundario).
Figura 4.6 Ventana de parámetros del transformador de la máquina

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 61
4. Línea interna del parque eólico: es la impedancia de la línea que discurre por el interior del parque, desde el transformador de la máquina hasta el transformador de la subestación.
Figura 4.7 Ventana de parámetros de la línea interna del parque eólico

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 62
5. Transformador de la subestación: se trata de la impedancia de cortocircuito del transformador de la subestación, que se conecta a la red de AT. También, se debe especificar las tensiones nominales del transformador (primario y secundario).
Figura 4.8 Ventana de parámetros del transformador de la subestación

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 63
6. Armónicos de tensión: se refiere a los armónicos de tensión que existan la red de AT. Se indicarán sólo los armónicos de la onda de referencia (fase A), de forma que a las fases B y C se les aplicarán idénticos armónicos (orden y valor eficaz), pero afectados de los desfases de las ondas B y C; así que los desfases de los armónicos respecto a las fundamentales, sea el mismo para las tres fases. Se pueden indicar hasta un máximo de tres armónicos distintos.
Figura 4.9 Ventana de parámetros de los armónicos de tensión

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 64
7. Desequilibrios en fase de las tensiones: se indicarán en caso de que la red de AT presente desequilibrios en ángulo de sus tensiones. Asimismo se mostrará en el caso de que se desee establecer, para la simulación, un ángulo inicial ( 0) de la fase A distinto de cero, incluso cuando no existiesen desequilibrios en los ángulos de las tensiones.
Figura 4.10 Ventana de desfases de las tensiones de la red

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 65
8. Huecos/subidas de tensión eficaz: se mostrarán en caso de que consten, en un instante determinado, variaciones en valor eficaz de las tensiones de la red.
Figura 4.11 Ventana de huecos de tensión en la red
Podemos especificar los siguientes tipos de huecos/subidas de tensión:
Escalón de subida.
Escalón de bajada.
Rampa de subida.
Rampa de bajada.

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 66
Curva por puntos: el usuario puede dibujar una curva cualquiera de cambio de tensión eficaz. Introducirá una serie de puntos, y el programa interpolará automáticamente para obtener la curva que pasa por todos ellos. Se tendrá que indicar anteriormente al programa el valor final constante ( ) en el que permanecerá el valor eficaz tras el cambio
sufrido.
Figura 4.12 Ventana para dibujar huecos de tensión
Para mostrar el comportamiento real de los sistemas eléctricos de potencia, se ofrece la posibilidad de indicar un comportamiento “independiente” de cada una de las fases, en lo que se refiere a las variaciones de valor eficaz.
Por ejemplo, podremos suponer la existencia de un escalón de subida en la fase A, una rampa de bajada en la fase B y una variación irregular en la fase C. Aun en instantes de tiempo completamente distintos.

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 67
• Tipo de par
Una misma máquina de inducción puede funcionar tanto como motor como generador.
1. Par motor: el par motor puede depender de la velocidad rotórica o del tiempo.
Figura 4.13 Ventana de par resistente

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 68
Par motor en función de la velocidad:
o Par constante
o Par lineal.
o Par parabólico.
o Par cúbico.
o Par hiperbólico.
o Curva par‐velocidad dibujada por el usuario (análogo al caso de curva por puntos en huecos de tensión).
Figura 4.14 Ventana de curvas par motor‐velocidad

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 69
Par motor en función del tiempo:
Figura 4.15 Ventana para elección de tipo de par motor‐tiempo

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 70
o Par constante con armónicos o escalones: suponemos un par de carga constante en el tiempo. Opcionalmente, se pueden agregar armónicos de par, o bien, un escalón de par en un instante determinado.
Figura 4.16 Ventana para armónicos de par motor
Figura 4.17 Ventana para escalón de par motor

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 71
o Series de escalones periódicas: en este caso suponemos el motor funcionando según oscilaciones cíclicas de larga duración de la carga. Es decir, funcionamiento según clases de servicio (S1, S2, S3,…). Se pueden especificar desde 1 hasta 4 subciclos distintos.
Figura 4.18 Ventana para series periódicas de par motor

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 72
2. Par generador: corresponde a un par ejercido a favor de la máquina (por ejemplo, el viento en un generador eólico), de modo que se supere la velocidad de sincronismo par negativo (generador) potencia eléctrica inyectada en la red de alimentación. En este caso, sólo depende del tiempo, u puede ser de varios tipos:
Par constante.
Par triangular: como un par senoidal llevado al extremo.
Par senoidal.
Curva par generador‐tiempo dibujada por el usuario (caso análogo a la curva por puntos en huecos de tensión).
Figura 4.19 Ventana para curvas de par generador‐tiempo

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 73
En los tres primeros tipos, también se pueden superponer armónicos de par.
Figura 4.20 Ventana para armónicos de par generador

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 74
• Máquina
Tenemos las siguientes opciones:
1. Parámetros de la máquina (S.I.): se visualizan los parámetros nominales de la máquina elegida en unidades del sistema internacional. Además podemos cambiar cualquier parámetro para que no sea el nominal.
Figura 4.21 Ventana de parámetros de simulación de la máquina elegida en unidades del sistema internacional

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 75
2. Parámetros de la máquina (p.u.): igualmente que en el anterior pero con los parámetros en por unidad.
Figura 4.22 Ventana de parámetros de simulación de la máquina elegida en por unidad
3. Cambiar máquina: sirve para elegir de la lista de máquinas de inducción, aquella que deseemos simular en nuestro sistema eléctrico.
Figura 4.23 Ventana para cambiar de máquina para la simulación

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 76
• Sistema de referencia
Debemos elegir el sistema de referencia desde el que queremos ver las magnitudes (tensiones, flujos, intensidades, etc.) de la máquina. Para ello, tenemos tres opciones:
1. Referencia síncrona: el sistema de referencia gira a la velocidad de sincronismo de la máquina en términos eléctricos.
2. Referencia rotórica: el sistema de referencia gira a la velocidad eléctrica del rotor.
3. Referencia arbitraria: la velocidad del sistema de referencia puede ser cualquiera (constante o función del tiempo).
• Transferencia de barras
El programa permite simular una transferencia de barras en la alimentación de la máquina. Ésta es una maniobra habitual en los parques eólicos, donde suelen existir, por lo menos, dos redes de alimentación independientes, de tal manera que, cuando haya un corte de suministro en la red principal, automáticamente se produce una maniobra de cambio de barras hacia el embarrado de la red secundaria. Así, el parque continúa con su actividad de generación sin interrupciones.
Sin embargo, y aunque esta maniobra suele ser muy rápida, existe un pequeño intervalo de tiempo durante el cual, la máquina no está alimentada externamente. Durante dicho tiempo se producen transitorios que interesa conocer, pues repercuten en la calidad de suministro.
En el proceso de transferencia de barras existen tres períodos diferentes en el funcionamiento:
1. Conexión al embarrado principal: en este período, la máquina se encuentra alimentada por la red principal.
2. Transferencia de barras: durante este intervalo, la máquina está desconectada de la red, de tal manera que las corrientes estatóricas son nulas. No obstante, los flujos estatóricos y rotóricos no se anulan, tampoco las corrientes rotóricas. Es decir, la máquina sigue generando campos magnéticos, que se irán atenuando con el tiempo. Por lo tanto, la duración de este período será crucial para la calidad de suministro.

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 77
3. Conexión al embarrado secundario: una vez finalizada la maniobra anterior, la máquina se encuentra conectada a la red secundaria.
• Modelo de ecuaciones
Aquí podemos elegir el tipo de modelo de las ecuaciones de tensión a integrar en la simulación. Entre ellos el modelo completo (transformación de Park) y los modelos reducidos de orden tercero, segundo, primero o tercero modificado.
• Base de datos
En este apartado podemos consultar o modificar los datos de las máquinas.
1. Historial de datos de entrada: se trata de una base de datos (archivo Excel) en donde se almacenan todos los datos de entrada (datos de la fuente de alimentación, parámetros de las máquinas simuladas, parámetros de los pares de carga o generadores, etc.) de las simulaciones realizadas. De esta manera, todas las simulaciones antiguas se pueden recuperar en cualquier momento indicando simplemente el código de la simulación.
2. Lista de máquinas de inducción: es una base de datos (archivo Excel) donde se encuentran los parámetros nominales de una serie de máquinas de inducción. El usuario puede consultarla para seleccionar la máquina que desee simular. Además, el usuario puede agregar una nueva máquina o modificar una existente en la lista.
Nota: las bases de datos (archivos Excel) sólo pueden ser modificadas desde Matlab, de forma que, si se realizan cambios directamente en el archivo Excel, estos cambios no afectarán realmente a los ficheros originales de datos (archivos *.mat de Matlab). Por tanto, cada vez que actualicemos las bases de datos, los archivos *.mat volcarán los datos a las hojas de Excel. Así se evita que el usuario modifique los datos por error.

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 78
• Gráficas
En esta ventana se pueden visualizar las representaciones gráficas de las variables de salida de las simulaciones, así como extraer estas representaciones y guardarlas como figura de Matlab.
Figura 4.24 Ventana de gráficas

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 79
• Comparación de proyectos
Aquí se permite representar en p.u. conjuntamente las variables de salida de dos proyectos distintos. También da la posibilidad de guardar las gráficas obtenidas, éstas se pueden extraer como figura de Matlab, y así almacenarlas en diferentes formatos de imagen (*.fig, *.bmp, *.gif, *.jpeg).
Figura 4.25 Ventana de comparación de proyectos
4.2 Gestión de la información
En general, la herramienta de simulación actúa con tres tipos de datos:
Datos para la simulación actual.
Datos históricos de todas las simulaciones ejecutadas.
Otros tipos de datos.
A continuación, se explica la tipología de los datos y el método de almacenamiento que se ha llevado a cabo.
HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 80
• Datos para la simulación actual
Son tres los tipos de datos que se tratan en cada simulación en curso:
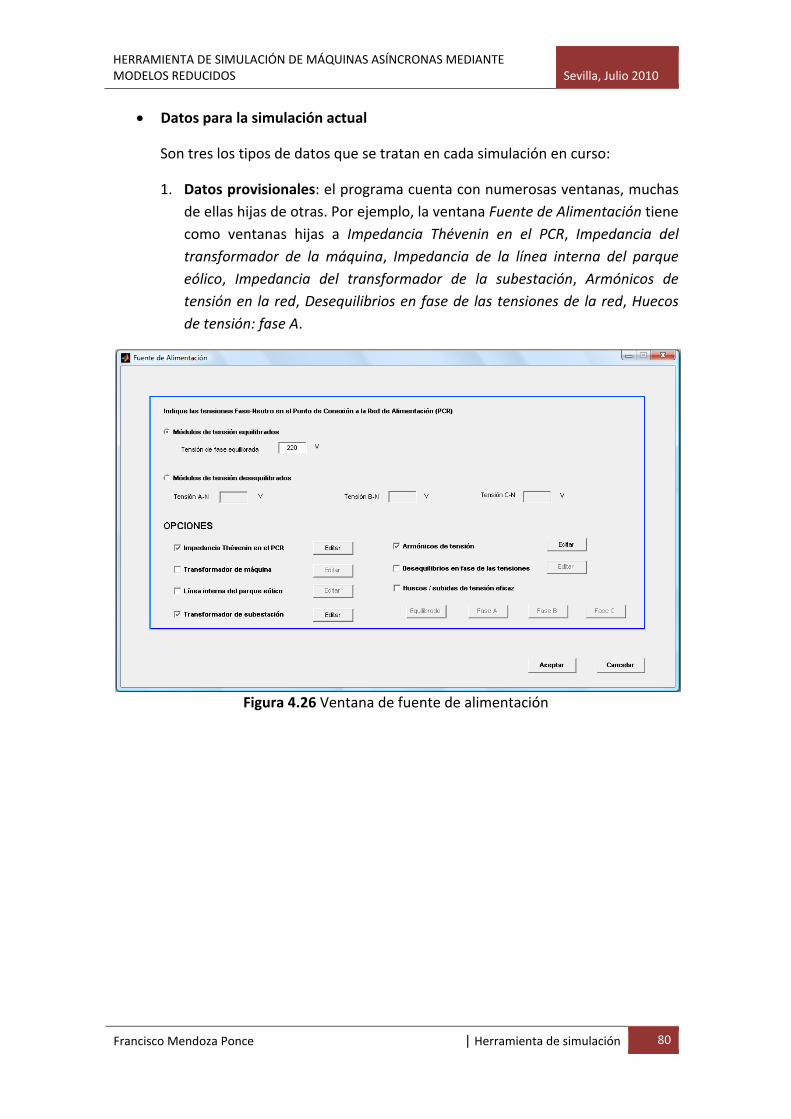
1. Datos provisionales: el programa cuenta con numerosas ventanas, muchas de ellas hijas de otras. Por ejemplo, la ventana Fuente de Alimentación tiene como ventanas hijas a Impedancia Thévenin en el PCR, Impedancia del transformador de la máquina, Impedancia de la línea interna del parque eólico, Impedancia del transformador de la subestación, Armónicos de tensión en la red, Desequilibrios en fase de las tensiones de la red, Huecos de tensión: fase A.
Figura 4.26 Ventana de fuente de alimentación

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Figura 4.27 Ventana de impedancia del transformador de la subestación
Así que, los datos que son aceptados en la ventana Impedancia Thévenin de la red se guardan en vectores de datos provisionales. Cada vez que se abra la ventana Impedancia Thévenin de la red, se visualizarán los datos que previamente se habían aceptado, gracias a que se habían guardado en los vectores de datos provisionales.
Los vectores de datos provisionales de cada ventana, se almacenan en sus respectivos ficheros de datos provisionales, en función de su tipología. Estos ficheros provisionales son los siguientes:
datos_prov_maquina.mat datos_prov_fuente_alimentacion.mat datos_prov_par_resistente.mat datos_prov_par_generador.mat
81Francisco Mendoza Ponce | Herramienta de simulación

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 82
Para apreciar mejor cómo son y se denominan los vectores de datos provisionales, a continuación se expone un extracto del código que resetea los vectores de datos y los guarda en sus respectivos ficheros:
% Máquina load('datos_prov_maquina.mat'); numserie = 1; % número de serie de la máquina a simular flagcambiomaquina = 1; save('datos_prov_maquina','‐append','numserie','flagcambiomaquina'); % Fuente de Alimentación load('datos_prov_fuente_alimentacion.mat'); vector_impedancias_fuente_prov(:)=0; vector_armonicos_tension_prov(:)=0; vector_angulos_tension_prov=[0 ‐2*pi/3 2*pi/3]; vector_huecos_tension_eq_prov(1:20)=0; vector_huecos_tension_fasea_prov(1:20)=0; vector_huecos_tension_faseb_prov(1:20)=0; vector_huecos_tension_fasec_prov(1:20)=0; puntos_t_huecos_tension_eq_prov=[]; puntos_U_huecos_tension_eq_prov=[]; vector_t_huecos_tension_eq_prov=[]; vector_U_huecos_tension_eq_prov=[]; extremos_tU_huecos_tension_eq_prov=[]; puntos_t_huecos_tension_fasea_prov=[]; puntos_U_huecos_tension_fasea_prov=[]; vector_t_huecos_tension_fasea_prov=[]; vector_U_huecos_tension_fasea_prov=[]; extremos_tU_huecos_tension_fasea_prov=[]; puntos_t_huecos_tension_faseb_prov=[]; puntos_U_huecos_tension_faseb_prov=[]; vector_t_huecos_tension_faseb_prov=[]; vector_U_huecos_tension_faseb_prov=[]; extremos_tU_huecos_tension_faseb_prov=[]; puntos_t_huecos_tension_fasec_prov=[]; puntos_U_huecos_tension_fasec_prov=[]; vector_t_huecos_tension_fasec_prov=[]; vector_U_huecos_tension_fasec_prov=[]; extremos_tU_huecos_tension_fasec_prov=[]; aux_tension(1:5)=0; save('datos_prov_fuente_alimentacion','‐append','vector_impedancias_fuente_prov','vector_armonicos_tension_prov','vector_angulos_tension_prov','vector_huecos_tension_eq_prov','vector_huecos_tension_fasea_prov','vector_huecos_tension_faseb_prov','vector_huecos_tension_fasec_prov','puntos_t_huecos_tension_eq_prov','puntos_U_huecos_tension_eq_prov','vector_t_huecos_tension_eq_prov','vector_U_huecos_tension_eq_prov','extremos_tU_huecos_tension_eq_prov','puntos_t_huecos_tension_fasea_prov','puntos_U_huecos_tension_fasea_prov','vector_t_huecos_tension_fasea_prov','vector_U_huecos_tension_fasea_prov','extremos_tU_huecos_tension_fasea_prov','puntos_t_huecos_tension_faseb_prov','puntos_U_huecos_tension_faseb_prov','vector_t_huecos_tension_faseb_prov','vector_U_huecos_tension_faseb_prov','extremos_tU_huecos_tension_faseb_prov','puntos_t_huecos_tension_fasec_prov','puntos_U_huecos_tension_fasec_prov','vector_t_huecos_tension_fasec_prov','vector_U_huecos_tension_fasec_prov','extremos_tU_huecos_tension_fasec_prov','aux_tension');
HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 83
% Par Resistente load('datos_prov_par_resistente.mat'); vector_ParRes_v_prov(1:13)=0; puntos_w_ParRes_v_prov=[]; puntos_T_ParRes_v_prov=[]; vector_w_ParRes_v_prov=[]; vector_T_ParRes_v_prov=[]; extremos_wT_ParRes_v_prov=[]; vector_armonicos_ParRes_prov(1:3)=0; vector_escalonParRes_prov(1:4)=0; vector_ClasesServicioTR_prov(1:8)=0; ParRes_t_nominal_prov=0; aux_Tnominal=0; save('datos_prov_par_resistente','‐append','vector_ParRes_v_prov','puntos_w_ParRes_v_prov','puntos_T_ParRes_v_prov','vector_w_ParRes_v_prov','vector_T_ParRes_v_prov','extremos_wT_ParRes_v_prov','vector_armonicos_ParRes_prov','vector_escalonParRes_prov','vector_ClasesServicioTR_prov','ParRes_t_nominal_prov','aux_Tnominal'); % Par Generador load('datos_prov_par_generador.mat'); vector_ParGen_t_prov(1:9)=0; vector_armonicos_ParGen_prov(1:3)=0; puntos_tiempo_ParGen_prov = []; puntos_T_ParGen_prov = []; vector_tiempo_ParGen_prov = []; vector_T_ParGen_prov = []; extremos_tT_ParGen_prov = []; save('datos_prov_par_generador','‐append','vector_ParGen_t_prov','vector_armonicos_ParGen_prov','puntos_tiempo_ParGen_prov','puntos_T_ParGen_prov','vector_tiempo_ParGen_prov','vector_T_ParGen_prov','extremos_tT_ParGen_prov');
2. Datos definitivos: continuando con el ejemplo anterior, si en la ventana Fuente de Alimentación, marcamos la casilla de verificación de la Impedancia del transformador de la subestación, y pulsamos Aceptar, entonces los datos provisionales pasarán a ser definitivos para la simulación. Por tanto, los vectores de datos provisionales serán volcados en los vectores de datos definitivos.
Todos los vectores de datos definitivos se guardan en un único fichero Datos_Input_Simulacion.mat.
A continuación se muestra una parte del código que resetea los vectores de datos definitivos y los almacena en el fichero anterior:
load('Datos_Input_Simulacion.mat'); % Máquina Vector_Parametros_Maquina_sim_SI = Matriz_Parametros_Maquinas_SI(1,:); % Inicializamos con la máquina nº serie 1

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 84
Vector_Parametros_Maquina_sim_pu = Matriz_Parametros_Maquinas_pu(1,:); % Inicializamos con la máquina nº serie 1 % Fuente de Alimentación vector_impedancias_fuente(:)=0; vector_armonicos_tension(:)=0; vector_modulos_tension(:)=0; vector_angulos_tension=[0 ‐2*pi/3 2*pi/3]; vector_huecos_tension_fasea(1:20)=0; vector_huecos_tension_faseb(1:20)=0; vector_huecos_tension_fasec(1:20)=0; vector_t_huecos_tension_fasea = []; vector_t_huecos_tension_faseb = []; vector_t_huecos_tension_fasec = []; vector_U_huecos_tension_fasea = []; vector_U_huecos_tension_faseb = []; vector_U_huecos_tension_fasec = []; puntos_t_huecos_tension_fasea = []; puntos_t_huecos_tension_faseb = []; puntos_t_huecos_tension_fasec = []; puntos_U_huecos_tension_fasea = []; puntos_U_huecos_tension_faseb = []; puntos_U_huecos_tension_fasec = []; extremos_tU_huecos_tension_fasea = []; extremos_tU_huecos_tension_faseb = []; extremos_tU_huecos_tension_fasec = []; % Par Resistente vector_ParRes_v(1:13)=0; vector_w_ParRes_v = []; vector_T_ParRes_v = []; puntos_w_ParRes_v = []; puntos_T_ParRes_v = []; extremos_wT_ParRes_v = []; vector_armonicos_ParRes(1:3)=0; vector_escalonParRes(1:4)=0; vector_ClasesServicioTR(1:8)=0; ParRes_t_nominal=0; % Par Generador vector_ParGen_t(1:9)=0; vector_armonicos_ParGen(1:3)=0; vector_tiempo_ParGen = []; vector_T_ParGen = []; puntos_tiempo_ParGen = []; puntos_T_ParGen = []; extremos_tT_ParGen = []; % Sistema de referencia vector_sreferencia(1:5)=0; % Transferencia de Barras vector_trans_barras(1:3) =0; % Tiempo final de simulación tfinal_sim =0;

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 85
% Modelo de las ecuaciones vector_modelo_ecuac (1:5) =0; save('Datos_Input_Simulacion','‐append','Vector_Parametros_Maquina_sim_SI','Vector_Parametros_Maquina_sim_pu','vector_impedancias_fuente','vector_armonicos_tension','vector_modulos_tension','vector_angulos_tension','vector_huecos_tension_fasea','vector_huecos_tension_faseb','vector_huecos_tension_fasec','vector_t_huecos_tension_fasea','vector_t_huecos_tension_faseb','vector_t_huecos_tension_fasec','vector_U_huecos_tension_fasea','vector_U_huecos_tension_faseb','vector_U_huecos_tension_fasec','puntos_t_huecos_tension_fasea','puntos_t_huecos_tension_faseb','puntos_t_huecos_tension_fasec','puntos_U_huecos_tension_fasea','puntos_U_huecos_tension_faseb','puntos_U_huecos_tension_fasec','extremos_tU_huecos_tension_fasea','extremos_tU_huecos_tension_faseb','extremos_tU_huecos_tension_fasec','vector_ParRes_v','vector_w_ParRes_v','vector_T_ParRes_v','puntos_w_ParRes_v','puntos_T_ParRes_v','extremos_wT_ParRes_v','vector_armonicos_ParRes','vector_escalonParRes','vector_ClasesServicioTR','ParRes_t_nominal','vector_ParGen_t','vector_armonicos_ParGen','vector_tiempo_ParGen','vector_T_ParGen','puntos_tiempo_ParGen','puntos_T_ParGen','extremos_tT_ParGen','vector_sreferencia','vector_trans_barras','tfinal_sim', 'vector_modelo_ecuac');
3. Datos de estado de las ventanas: las ventanas cuentan con una serie de objetos (casillas de texto editable, casillas de verificación (checkbox), botones de radio, etc.) que el usuario puede cambiar de estado a su elección.
Para que cada vez que se vuelva a abrir la ventana, ésta conserve su estado anterior, es necesario guardar la información de estado de todos sus objetos en vectores, que llamaremos vectores de estado. Estos vectores se almacenan, a su vez, en el siguiente fichero estado_interfaces.mat.
Se presenta a continuación un fragmento del código que resetea los vectores de datos de estado (para que se muestren las ventanas con su estado por defecto) y los guarda en el fichero anterior:
load('estado_interfaces.mat'); vector_flagdefaults(1:100)=1; % se han definido elementos para un máximo de 100 interfaces estado_fuente_alimentacion(1:40) = 0; estado_par_resistente(1:18) = 0; estado_par_generador(1:5) = 0; estado_interfaz_ppal(1:11) = 0; save('estado_interfaces','‐append','estado_fuente_alimentacion','estado_par_resistente','estado_par_generador','estado_interfaz_ppal','vector_flagdefaults');
Nota: obsérvese que en los códigos adjuntados, los vectores cuyos datos son reseteados a cero tienen una longitud fija conocida. Sin embargo, no sucede lo mismo con los que son reseteados al valor NULL ([ ]), que no tienen una longitud fija.

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 86
• Datos históricos de simulaciones
Todos los vectores de datos del apartado anterior (provisionales, definitivos y de estado) se sobrescriben con los nuevos datos de cada simulación en curso. Por ello, y cada vez que finaliza una simulación, es necesario volcar sus datos en una base de datos de históricos para que sea posible recuperar esos datos en cualquier momento.
Además de los datos de entrada, también se guardarán los datos de salida de todas las simulaciones, con la misma finalidad.
Se detalla a continuación los tipos de datos y su distribución en las bases de datos de históricos.
1. Datos de entrada de longitud fija: son los datos de entrada que se guardan en vectores de datos de longitud fija o definida, uno para cada modelo de ecuaciones de tensión a integrar. Es decir, que la longitud de estos vectores no varía en cada simulación.
El almacenamiento de estos datos se lleva a cabo en los archivos:
Guardar_DEntrada_Lfija_comp.m Guardar_DEntrada_Lfija_3red.m Guardar_DEntrada_Lfija_2red.m Guardar_DEntrada_Lfija_1red.m Guardar_DEntrada_Lfija_3redmod.m
Se guardará la siguiente información:
Vectores de datos definitivos con longitud fija: éstos son los vectores que tienen longitud fija (el número de elementos que contienen no cambia de una simulación a otra) de entre los que se guardaron en el fichero Datos_Input_Simulacion.mat.
Ahora son almacenados como filas de las matrices de históricos. Se muestra un extracto del código de almacenamiento:
load('Nomenclatura_indexado.mat'); m = length(codigos_simulacion_comp); %%%% Vectores de parámetros de entrada definitivos load('Datos_Input_Simulacion.mat'); load('Historico_Datos_Input_comp.mat'); Matriz_Parametros_Maquina_sim_SI(m,:) = Vector_Parametros_Maquina_sim_SI; Matriz_Parametros_Maquina_sim_pu(m,:) = Vector_Parametros_Maquina_sim_pu; Matriz_impedancias_fuente(m,:) = vector_impedancias_fuente; Matriz_armonicos_tension(m,:) = vector_armonicos_tension; Matriz_modulos_tension(m,:) = vector_modulos_tension;
HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 87
Matriz_angulos_tension(m,:) = vector_angulos_tension; Matriz_huecos_tension_fasea(m,:) = vector_huecos_tension_fasea; Matriz_huecos_tension_faseb(m,:) = vector_huecos_tension_faseb; Matriz_huecos_tension_fasec(m,:) = vector_huecos_tension_fasec; Matriz_ParRes_v(m,:) = vector_ParRes_v; Matriz_armonicos_ParRes(m,:) = vector_armonicos_ParRes; Matriz_escalonParRes(m,:) = vector_escalonParRes; Matriz_ClasesServicioTR(m,:) = vector_ClasesServicioTR; Vector_ParRes_t_nominal(m,1) = ParRes_t_nominal; Matriz_ParGen_t(m,:) = vector_ParGen_t; Matriz_armonicos_ParGen(m,:) = vector_armonicos_ParGen; Matriz_sreferencia(m,:) = vector_sreferencia; Matriz_trans_barras(m,:) = vector_trans_barras; Vector_tfinal_sim(m,1) = tfinal_sim; Matriz_modelo_ecuac(m,:) = vector_modelo_ecuac; save('Historico_Datos_Input_comp','Matriz_Parametros_Maquina_sim_SI','Matriz_Parametros_Maquina_sim_pu','Matriz_impedancias_fuente','Matriz_armonicos_tension','Matriz_modulos_tension','Matriz_angulos_tension','Matriz_huecos_tension_fasea','Matriz_huecos_tension_faseb','Matriz_huecos_tension_fasec','Matriz_ParRes_v','Matriz_armonicos_ParRes','Matriz_escalonParRes','Matriz_ClasesServicioTR','Vector_ParRes_t_nominal','Matriz_ParGen_t','Matriz_armonicos_ParGen','Matriz_sreferencia','Matriz_trans_barras','Vector_tfinal_sim','Matriz_modelo_ecuac');
Se observa cómo cada fila de las matrices de históricos, corresponde a una simulación diferente. Es decir, que el número de fila de cada matriz de históricos se identifica con el código de la simulación. De tal forma que, por ejemplo, el vector vector_impedancias_fuente de la simulación con código 00235, se guardará como la fila número 235 de la matriz de históricos Matriz_impedancias_fuente.
Las matrices de históricos de datos definitivos son almacenadas en los ficheros para cada tipo de modelo:
Historico_Datos_Input_comp.mat Historico_Datos_Input_3red.mat Historico_Datos_Input_2red.mat Historico_Datos_Input_1red.mat Historico_Datos_Input_3redmod.mat
Vectores de datos provisionales con longitud fija: se tratan de los vectores que se almacenan en los ficheros de datos provisionales. Y en particular, aquellos que tienen longitud fija.
Ahora son almacenados como filas de las matrices de históricos. Estas matrices se guardan en los ficheros, uno distinto por modelo:
Historico_Datos_prov_comp.mat Historico_Datos_prov_3red.mat Historico_Datos_prov_2red.mat Historico_Datos_prov_1red.mat

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 88
Historico_Datos_prov_3redmod.mat
Se muestra una parte del código de almacenamiento:
load('Nomenclatura_indexado.mat'); m = length(codigos_simulacion_comp); load('Datos_Input_Simulacion.mat'); load('Historico_Datos_Input_comp.mat'); Matriz_Parametros_Maquina_sim_SI(m,:) = Vector_Parametros_Maquina_sim_SI; Matriz_Parametros_Maquina_sim_pu(m,:) = Vector_Parametros_Maquina_sim_pu; Matriz_impedancias_fuente(m,:) = vector_impedancias_fuente; Matriz_armonicos_tension(m,:) = vector_armonicos_tension; Matriz_modulos_tension(m,:) = vector_modulos_tension; Matriz_angulos_tension(m,:) = vector_angulos_tension; Matriz_huecos_tension_fasea(m,:) = vector_huecos_tension_fasea; Matriz_huecos_tension_faseb(m,:) = vector_huecos_tension_faseb; Matriz_huecos_tension_fasec(m,:) = vector_huecos_tension_fasec; Matriz_ParRes_v(m,:) = vector_ParRes_v; Matriz_armonicos_ParRes(m,:) = vector_armonicos_ParRes; Matriz_escalonParRes(m,:) = vector_escalonParRes; Matriz_ClasesServicioTR(m,:) = vector_ClasesServicioTR; Vector_ParRes_t_nominal(m,1) = ParRes_t_nominal; Matriz_ParGen_t(m,:) = vector_ParGen_t; Matriz_armonicos_ParGen(m,:) = vector_armonicos_ParGen; Matriz_sreferencia(m,:) = vector_sreferencia; Matriz_trans_barras(m,:) = vector_trans_barras; Vector_tfinal_sim(m,1) = tfinal_sim; Matriz_modelo_ecuac(m,:) = vector_modelo_ecuac; save('Historico_Datos_Input_comp','Matriz_Parametros_Maquina_sim_SI','Matriz_Parametros_Maquina_sim_pu','Matriz_impedancias_fuente','Matriz_armonicos_tension','Matriz_modulos_tension','Matriz_angulos_tension','Matriz_huecos_tension_fasea','Matriz_huecos_tension_faseb','Matriz_huecos_tension_fasec','Matriz_ParRes_v','Matriz_armonicos_ParRes','Matriz_escalonParRes','Matriz_ClasesServicioTR','Vector_ParRes_t_nominal','Matriz_ParGen_t','Matriz_armonicos_ParGen','Matriz_sreferencia','Matriz_trans_barras','Vector_tfinal_sim','Matriz_modelo_ecuac');
Vectores de estado de las ventanas: los vectores de estado de cada simulación se almacenan como filas de matrices de históricos. Y estas matrices se guardan en los ficheros para cada modelo:
Historico_estado_interfaces_comp.mat Historico_estado_interfaces_3red.mat Historico_estado_interfaces_2red.mat Historico_estado_interfaces_1red.mat Historico_estado_interfaces_3redmod.mat
Se muestra un fragmento del código de almacenamiento:
load('Datos_Input_Simulacion.mat'); load('Historico_Datos_Input_comp.mat');

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 89
Matriz_Parametros_Maquina_sim_SI(m,:) = Vector_Parametros_Maquina_sim_SI; Matriz_Parametros_Maquina_sim_pu(m,:) = Vector_Parametros_Maquina_sim_pu; Matriz_impedancias_fuente(m,:) = vector_impedancias_fuente; Matriz_armonicos_tension(m,:) = vector_armonicos_tension; Matriz_modulos_tension(m,:) = vector_modulos_tension; Matriz_angulos_tension(m,:) = vector_angulos_tension; Matriz_huecos_tension_fasea(m,:) = vector_huecos_tension_fasea; Matriz_huecos_tension_faseb(m,:) = vector_huecos_tension_faseb; Matriz_huecos_tension_fasec(m,:) = vector_huecos_tension_fasec; Matriz_ParRes_v(m,:) = vector_ParRes_v; Matriz_armonicos_ParRes(m,:) = vector_armonicos_ParRes; Matriz_escalonParRes(m,:) = vector_escalonParRes; Matriz_ClasesServicioTR(m,:) = vector_ClasesServicioTR; Vector_ParRes_t_nominal(m,1) = ParRes_t_nominal; Matriz_ParGen_t(m,:) = vector_ParGen_t; Matriz_armonicos_ParGen(m,:) = vector_armonicos_ParGen; Matriz_sreferencia(m,:) = vector_sreferencia; Matriz_trans_barras(m,:) = vector_trans_barras; Vector_tfinal_sim(m,1) = tfinal_sim; Matriz_modelo_ecuac(m,:) = vector_modelo_ecuac; save('Historico_Datos_Input_comp','Matriz_Parametros_Maquina_sim_SI','Matriz_Parametros_Maquina_sim_pu','Matriz_impedancias_fuente','Matriz_armonicos_tension','Matriz_modulos_tension','Matriz_angulos_tension','Matriz_huecos_tension_fasea','Matriz_huecos_tension_faseb','Matriz_huecos_tension_fasec','Matriz_ParRes_v','Matriz_armonicos_ParRes','Matriz_escalonParRes','Matriz_ClasesServicioTR','Vector_ParRes_t_nominal','Matriz_ParGen_t','Matriz_armonicos_ParGen','Matriz_sreferencia','Matriz_trans_barras','Vector_tfinal_sim','Matriz_modelo_ecuac');
Todas estas matrices de históricos son volcadas posteriormente a los archivos Excel uno por modelo:
Historico_Datos_Entrada_comp.xls Historico_Datos_Entrada_3red.xls Historico_Datos_Entrada_2red.xls Historico_Datos_Entrada_1red.xls Historico_Datos_Entrada_3redmod.xls
Donde el usuario puede consultar todos los datos de entrada utilizados en las simulaciones anteriores. Si decide reutilizar los datos de entrada de alguna simulación del histórico sólo tendrá que indicar en la herramienta de simulación, su código. De este modo se cargará automáticamente todos los datos.
2. Datos de entrada de longitud indefinida: son los vectores de datos de entrada que no tienen una longitud fija con cada simulación. Por ejemplo, el vector que almacena los puntos de interpolación de una gráfica dibujada por el usuario: el número de puntos de una gráfica variará en función de la gráfica dibujada.
El almacenamiento de estos datos se lleva a cabo en los archivos, para los distintos modelos:

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 90
Guardar_DEntrada_Lindef_comp.m Guardar_DEntrada_Lindef_3red.m Guardar_DEntrada_Lindef_2red.m Guardar_DEntrada_Lindef_1red.m Guardar_DEntrada_Lindef_3redmod.m.
Se guardará la información siguiente:
Vectores de datos definitivos con longitud indefinida: son aquellos que se guardaron en el fichero Datos_Input_Simulacion.mat y que no tienen una longitud definida.
Vectores de datos provisionales con longitud indefinida: son aquellos que se almacenaron en los ficheros de datos provisionales y que no tienen una longitud definida.
Variables (numserie y flagcambiomaquina): éstos son dos datos provisionales que se utilizan para elegir las máquinas a simular. Se guardaron en el fichero datos_prov_maquina.mat.
Estos tres grupos de datos, se van a almacenar en un fichero del tipo:
VectLongIndef_comp_xxxxx.mat VectLongIndef_3red_xxxxx.mat VectLongIndef_2red_xxxxx.mat VectLongIndef_1red_xxxxx.mat VectLongIndef_3redmod_xxxxx.mat
por cada simulación y modelo, donde xxxxx es el código de la simulación.
Se muestra a continuación el código de almacenamiento de estos datos:
load('Nomenclatura_indexado.mat'); m = length(codigos_simulacion_comp); load('Datos_Input_Simulacion.mat'); load('datos_prov_maquina.mat'); load('datos_prov_fuente_alimentacion.mat'); load('datos_prov_par_resistente.mat'); load('datos_prov_par_generador.mat'); % Guardamos los datos en el fichero "VectLongIndef_comp_xxxxx.mat", siendo xxxxx el número de serie de la simulación actual save(name_fich_indef_comp(m,:),'vector_t_huecos_tension_fasea','vector_t_huecos_tension_faseb','vector_t_huecos_tension_fasec','vector_U_huecos_tension_fasea','vector_U_huecos_tension_faseb','vector_U_huecos_tension_fasec','puntos_t_huecos_tension_fasea','puntos_t_huecos_tension_faseb','puntos_t_huecos_tension_fasec','puntos_U_huecos_tension_fasea','puntos_U_huecos_tension_faseb','puntos_U_huecos_tension_fasec','extremos_tU_huecos_tension_fasea','extremos_tU_huecos_tension_faseb','extremos_tU_huecos_tension_fasec','vector_w_ParRes_v','vector_T_ParRes_v','puntos_w_ParRes_v','puntos_T_ParRes_v','extremos_wT_ParRes_v','vector_tiempo_ParGen','vector_T_ParGen','puntos_tiempo_ParGen','puntos_T_ParGen','extremos_tT_ParGen','numserie','flagcambiomaquina','puntos_t_hue

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 91
cos_tension_eq_prov','puntos_U_huecos_tension_eq_prov','vector_t_huecos_tension_eq_prov','vector_U_huecos_tension_eq_prov','extremos_tU_huecos_tension_eq_prov','puntos_t_huecos_tension_fasea_prov','puntos_U_huecos_tension_fasea_prov','vector_t_huecos_tension_fasea_prov','vector_U_huecos_tension_fasea_prov','extremos_tU_huecos_tension_fasea_prov','puntos_t_huecos_tension_faseb_prov','puntos_U_huecos_tension_faseb_prov','vector_t_huecos_tension_faseb_prov','vector_U_huecos_tension_faseb_prov','extremos_tU_huecos_tension_faseb_prov','puntos_t_huecos_tension_fasec_prov','puntos_U_huecos_tension_fasec_prov','vector_t_huecos_tension_fasec_prov','vector_U_huecos_tension_fasec_prov','extremos_tU_huecos_tension_fasec_prov','puntos_tiempo_ParGen_prov','puntos_T_ParGen_prov','vector_tiempo_ParGen_prov','vector_T_ParGen_prov','extremos_tT_ParGen_prov','puntos_w_ParRes_v_prov','puntos_T_ParRes_v_prov','vector_w_ParRes_v_prov','vector_T_ParRes_v_prov','extremos_wT_ParRes_v_prov');
3. Datos de salida: los datos de salida de las simulaciones, al ser vectores y matrices de dimensiones indefinidas, tampoco pueden ser guardados en matrices de históricos. Se opta, entonces, por almacenar todos los datos de salida de cada simulación y modelo en ficheros independientes del tipo:
Datos_Salida_comp_xxxxx.mat Datos_Salida_3red_xxxxx.mat Datos_Salida_2red_xxxxx.mat Datos_Salida_1red_xxxxx.mat Datos_Salida_3redmod_xxxxx.mat
donde xxxxx es el código de la simulación correspondiente.
Se muestra a continuación el código que realiza el almacenamiento de las variables de salida en un fichero del tipo mencionado:
%%%% ALMACENAMIENTO DE LA INFORMACIÓN DE SALIDA %%%% load('Nomenclatura_indexado.mat'); long =length(codigos_simulacion_comp); codigos_simulacion_comp(long+1)=long+1; % actualizamos el vector de códigos save('Nomenclatura_indexado','‐append','codigos_simulacion_comp'); % Guardamos los datos de salida de la simulación en el fichero "Datos_Salida_comp_xxxxx.mat" siendo xxxxx el código de la simulación, que en este caso es la última simulación save(name_fich_salida_comp(long+1,:),'t','Te','posicion_rotor','w_rotor','Vabcs_PCR_BT','Vqd0s_PCR_BT','Vabc_maquina','Vqd0_maquina','Iabc','Iqd0');

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 92
Para cada simulación realizada, se guardará la siguiente información de salida:
Tabla 4.1 Magnitudes de salida
Nota: las corrientes rotóricas están referidas todas al estator.
Estas variables de salida serán después utilizadas para las representaciones gráficas.
Si el usuario desea, por vía externa a la herramienta de simulación, acceder a las variables de salida de cualquier simulación, sólo tendrá que cargar el fichero correspondiente del tipo Dato_Salida_xxxxx.mat mediante el comando load(Datos_Salida_xxxxx.mat).
Así, todas las variables de salida, cuya denominación es la mostrada en la tabla anterior, estarán disponibles para ser procesadas:
Representaciones gráficas de cualquier tipo entre ellas.
Procesado de estas variables de estado para calcular cualquier otra variable que se derive de las anteriores: potencias, caídas de tensión, etc.
Realización de cualquier tipo de cálculos entre las mismas.
Exportación de las variables a otros ficheros.
Etc.
Denominación Descripción de la magnitud Unidades
Vabcs_PCR_BTTensiones abc del Punto de Conexión a la Red, referidas al lado de
BT (lado de la máquina)V
Vqd0s_PCR_BTTensiones qd0 del Punto de Conexión a la Red, referidas al lado de
BT (lado de la máquina)V
Vabc_maquina Tensiones estatóricas y rotóricas abc en bornas de la máquina V
Vqd0_maquina Tensiones estatóricas y rotóricas qd0 en bornas de la máquina V
Iabc Intensidades estatóricas y rotóricas abc que circulan por la máquina A
Iqd0 Intensidades estatóricas y rotóricas qd0 que circulan por la máquina A
t Vector de tiempos de la simulación s
Te Par electromagnético interno de la máquina N∙m
posicion_rotor Posición angular del rotorrad
eléctricos
w_rotor Velocidad angular del rotorr.p.m.
geométrica

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 93
• Otros tipos de datos
Existen tres ficheros de datos, que todavía no se han descrito:
1. BD_Parametros_Maquinas.mat: en este fichero se guardan los parámetros nominales de una lista de máquinas de inducción. Dichos parámetros están disponibles, para cada máquina, tanto en unidades del sistema internacional, como en por unidad. Los datos se almacenan en dos matrices distintas, una para los parámetros en unidades S.I. y otra para los parámetros en p.u. Estas matrices son volcadas en el archivo Excel Listas_Maquinas_Induccion.xls para que el usuario pueda consultar la lista y decidir qué máquina desea simular.
Se muestra un extracto del código que almacena estas matrices en el fichero mencionado, y vuelca la información en la base de datos de Excel:
load('BD_Parametros_Maquinas.mat'); [m,n]=size(Matriz_Parametros_Maquinas_SI); [mpu,npu]=size(Matriz_Parametros_Maquinas_pu); % Calculamos los elementos de la matriz "Matriz_Parametros_Maquinas_SI" J=2*H*(ppolos^2)*1000*potencia/((2*pi*frecuencia)^2); Rs=Rspu*((Unominal)^2)/(potencia*1e5); Rrp=Rrpu*((Unominal)^2)/(potencia*1e5); Lms=Lmspu*((Unominal)^2)/(potencia*1000*2*pi*frecuencia); Lls=Llspu*((Unominal)^2)/(potencia*1000*2*pi*frecuencia); Llrp=Llrpu*((Unominal)^2)/(potencia*1000*2*pi*frecuencia); % Guardamos los datos en la matriz "Matriz_Parametros_Maquinas_pu" Matriz_Parametros_Maquinas_pu(m+1,1)=m+1; Matriz_Parametros_Maquinas_pu(m+1,2)=potencia; Matriz_Parametros_Maquinas_pu(m+1,3)=Unominal; Matriz_Parametros_Maquinas_pu(m+1,4)=frecuencia; Matriz_Parametros_Maquinas_pu(m+1,5)=deslizamiento; Matriz_Parametros_Maquinas_pu(m+1,6)=ppolos; Matriz_Parametros_Maquinas_pu(m+1,7)=H; Matriz_Parametros_Maquinas_pu(m+1,8)=Rspu; Matriz_Parametros_Maquinas_pu(m+1,9)=Rrpu; Matriz_Parametros_Maquinas_pu(m+1,10)=Lmspu; Matriz_Parametros_Maquinas_pu(m+1,11)=Llspu; Matriz_Parametros_Maquinas_pu(m+1,12)=Llrpu; % Guardamos los datos en la matriz "Matriz_Parametros_Maquinas_SI" Matriz_Parametros_Maquinas_SI(m+1,1)=m+1; %número de serie de la máquina Matriz_Parametros_Maquinas_SI(m+1,2)=potencia; Matriz_Parametros_Maquinas_SI(m+1,3)=Unominal; Matriz_Parametros_Maquinas_SI(m+1,4)=frecuencia; Matriz_Parametros_Maquinas_SI(m+1,5)=deslizamiento; Matriz_Parametros_Maquinas_SI(m+1,6)=ppolos; Matriz_Parametros_Maquinas_SI(m+1,7)=J;

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 94
Matriz_Parametros_Maquinas_SI(m+1,8)=Rs; Matriz_Parametros_Maquinas_SI(m+1,9)=Rrp; Matriz_Parametros_Maquinas_SI(m+1,10)=Lms; Matriz_Parametros_Maquinas_SI(m+1,11)=Lls; Matriz_Parametros_Maquinas_SI(m+1,12)=Llrp; % Guardamos las matrices en el fichero "BD_Parametros_Maquinas.mat" save('BD_Parametros_Maquinas','Matriz_Parametros_Maquinas_SI','Matriz_Parametros_Maquinas_pu'); % Cargamos este fichero load('BD_Parametros_Maquinas.mat'); % Exportamos las matrices a un fichero de Excel, para que el usuario pueda consultar la Base de Datos xlswrite('Lista_Maquinas_Induccion.xls',Matriz_Parametros_Maquinas_SI,'Sistema Internacional','B4'); xlswrite('Lista_Maquinas_Induccion.xls',Matriz_Parametros_Maquinas_pu,'Adimensional','B4');
2. Nomenclatura_indexado.mat: en este fichero se guardan tres vectores de datos auxiliares, uno para cada tipo de modelo, que son:
name_fich_salida: almacena los nombres de los ficheros de salida.
name_fich_salida_comp name_fich_salida_3red name_fich_salida_2red name_fich_salida_1red name_fich_salida_3redmod
A continuación se muestra parte de su contenido:
name_fich_salida_comp = Datos_Salida_comp_00001.mat Datos_Salida_comp_00002.mat Datos_Salida_comp_00003.mat Datos_Salida_comp_00004.mat Datos_Salida_comp_00005.mat Datos_Salida_comp_00006.mat Datos_Salida_comp_00007.mat Datos_Salida_comp_00008.mat Datos_Salida_comp_00009.mat Datos_Salida_comp_00010.mat Datos_Salida_comp_00011.mat Datos_Salida_comp_00012.mat Datos_Salida_comp_00013.mat Datos_Salida_comp_00014.mat Datos_Salida_comp_00015.mat
name_fich_indef: guarda los nombres de los ficheros de datos de longitud indefinida.
name_fich_indef_comp name_fich_indef_3red name_fich_indef_2red

HERRAMIENTA DE SIMULACIÓN DE MÁQUINAS ASÍNCRONAS MEDIANTE MODELOS REDUCIDOS Sevilla, Julio 2010
Francisco Mendoza Ponce | Herramienta de simulación 95
name_fich_indef_1red name_fich_indef_3redmod
Se muestra un fragmento de su contenido:
name_fich_indef_comp = VectLongIndef_comp_00001.mat VectLongIndef _comp_00002.mat VectLongIndef _comp_00003.mat VectLongIndef _comp_00004.mat VectLongIndef _comp_00005.mat VectLongIndef _comp_00006.mat VectLongIndef _comp_00007.mat VectLongIndef _comp_00008.mat VectLongIndef _comp_00009.mat VectLongIndef _comp_00010.mat VectLongIndef _comp_00011.mat VectLongIndef _comp_00012.mat VectLongIndef _comp_00013.mat VectLongIndef _comp_00014.mat VectLongIndef _comp_00015.mat
codigos_simulacion: almacena los códigos de simulación. Su longitud actual corresponde al número de simulaciones guardadas en la base de datos hasta el momento. Es decir, que cada vez que se realice una nueva simulación, su longitud aumenta en un elemento.
codigos_simulacion_comp codigos_simulacion_3red codigos_simulacion_2red codigos_simulacion_1red codigos_simulacion_3redmod
Se muestra un extracto de su contenido:
codigos_simulacion_comp = 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Los datos de los vectores name_fich_salida_xxxx y name_fich_indef_xxxx se han cargado leyendo del archivo Excel Generacion_nombres_indices.xls.
3. datos_auxiliares.mat: este fichero contiene las variables para cada modelo codigo_comp, codigo_3red, codigo_2red, codigo_1red, codigo_3redmod recogida en la ventana Opciones iniciales e indica el código del proyecto (o simulación) del que el usuario quiere cargar los datos de entrada, cuando se elige esa opción en la ventana anterior (Cargar datos de entrada de proyecto archivado).