3.8 design example - philadelphia university design... · gantry jib monorail ... the girder...
TRANSCRIPT

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
3.8 Design Example
Dr. Tarek A. Tutunji
Philadelphia University, Jordan

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
Preview In the previous sequences, seven design steps were
discussed.
In this sequence, a design example: overhead crane model will be presented to show the seven steps

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
1. Define the Problem The objective is to build a system that can translate a
weight in three dimensions by manual joystick.
Specifications:
Load = 5 kg
Speed = 0.11 m/s
Constraints
Time 8 months
Budget: $800

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
2. Gather Information Types of cranes
Tower
Truck Mounted
Overhead
Travelling bridge
Gantry
Jib
Monorail

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
2. Gather information An overhead crane is a crane where the hook-and-line
mechanism runs along a horizontal beam that itself runs along two widely separated rails.
Also a hoist is used to lift the items, the bridge, which spans the area covered by the crane, and a trolley to move along the bridge.
Its purpose is to move objects automatically between two locations in a factory

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
2. Gather Information

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
2. Gather Information Main Components
Bridge
Rail
Trolley
Beam
Hook

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
2. Gather Information Electrical components
Motors
Electronics
Controller
Sensor
Mechanical components
Shafts
Gears

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
3. Propose Solutions Type of crane
Tower
Overhead
Type of actuators
Electric: DC, AC, or Stepper
Pneumatic
Type of sensors
Optical
Limit Switches
Type of controller
PC
Microcontroller
Analog

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
4. Study the Solutions Overhead crane works
better than Tower for our purpose
Microcontroller
Cheaper than PC
More accurate than analog
DC Motor
Cheaper than AC and easier to control
Easier than pneumatic
Sensors
Limit switch for linear end position
Optical encoder for motor position

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
4. Study the Solutions: Choose Single girder overhead crane with dimensions: 2 m
length, 1.2 m width, and 1 m height
Three DC motors for xyz-directions
PIC microcontroller
Limit switches, three positioning sensors, control and drive circuits
Keypad. The user can specify the desired position by entering the coordinates on the keypad

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
5. Analyze & Design: Block Diagram
ControllerPower Electronics
Interface
Limit Switch Sensors
Crane Plant Electrical Motors

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
Analysis: Weight Calculations
Motors weight = 1.5kg ×2 = 3kg
• Shaft and bearing =4kg
• U- Shape steel bar and steel sheet = 2kg
• Screws and roundels = 0.25kg
• Teflon wheels = 0.25 kg
• Other parts = 0.5 kg
Total weight of Trolley = 10 kg

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
Analysis: Power Calculations F = M × g F = 5 kg × 9.81 m/s² = 49.05 N
T = F × R T = 49.05 N × 0.025 m = 1.23 N.m
Pm = T × ω Pm = 1.23 N.m × 4.7 rad/s = 5.8 watt.
P actual = 5.8 watt × 1.6 = 9.6 watt
Pe = 9.6Watt /0.8 = 12 Watt
Pe = I × V
We chose DC motor with V = 12 V, I = 3 A.

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
Analysis and Design: Simulation

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
Design: Mechanical Drawings

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
Design: Flow Chart

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
Design: Schematic Diagram

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
Final Design The mechanical components were composed of the frame,
the girder, and the trolley.
The frame used bars of hot roll steel AISI 1020: two parallel tracks of 2m length, six vertical columns of 1m length, and sixteen side holding bars.
The girder consisted of two parallel girder tracks of 1.2 m length mounted to side rolling bases.
The trolley part had two 36 watt DC motors with internal worm gear assembly mounted to side rolling bases.

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
Final Design Actuators:
Three DC motors as: Hook motor to lift the load, trolley motor to move the trolley above the girder, and girder motor to move the girder above the bridges. Each dc motor (3 A, 12V) had internal gears in order to reduce the speed and increase the torque with a gear ratio 1/140.
Sensors:
Two linear optical encoders were used as displacement sensors for the x-y positioning with a resolution 1pulse/cm. The tracks were made from plastic and fixed to the frame. For the z-direction, rotational optical encoders were placed on the shaft of the pulley with a resolution of 20pulse/revolution.

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
6. Implement: PCB

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
Implementation: Mechanical

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
7. Evaluate The crane was tested in
the labs
Equipment used: Scopes and multi-meters
Different loads (up to 5 Kg) were used
Speed of movement was measured using stopwatch
Microcontroller was damaged during testing.
Limit switches were calibrated.
The load cable was re-packaged
Added support to the skeleton frame
Insulated the controller using the opto-coupler.
Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
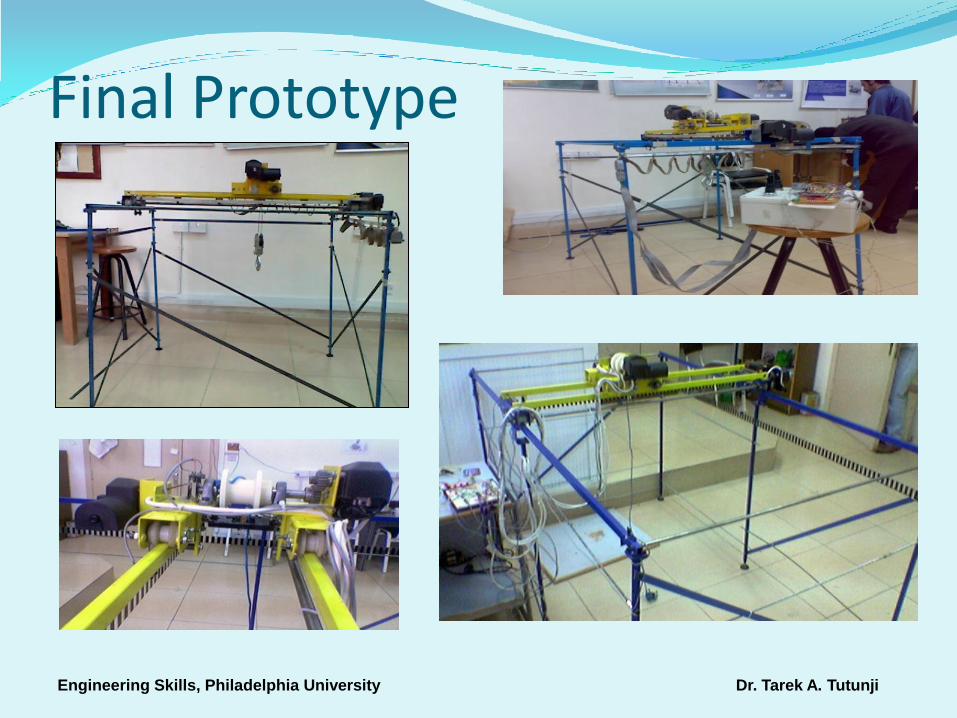
Final Prototype

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
Acknowledgement This work was the effort of two student design teams:
Team 1:
Abd Al-hafez Suleiman
Yosef Abo Hurira
Team 2:
Hassan Abu Zahra
Moafeq Alkhateeb
Fadi Darweesh

Dr. Tarek A. TutunjiEngineering Skills, Philadelphia University
Conclusion A design example was provided to show the 7-
design steps
In this design project, students used the 7-step design process to build an overhead crane model