27 february
TRANSCRIPT

1
ANADOLU ÜNİVERSİTESİ
FİZİK LABORATUVARI I
FÖYÜ
Yard. Doç. Dr. Abidin KILIÇ
Doç. Dr. Özgür ALVER Araş. Gör. Özge BAĞLAYAN

2
ÖĞRENCİNİN
ADI SOYADI :………………………………………………………..
NUMARASI :………………………………………………………..
FAKÜLTESİ :………………………………………………………..
BÖLÜMÜ :………………………………………………………..
DENEY
SIRA NO
DENEY
KODU
DENEYİN YAPILDIĞI
TARİH
AÇIKLAMA/ONAY
1
2
3
4
5
6
7
8
9
10
BURAYA
FOTOĞRAFINIZI YAPIŞTIRINIZ
3
İÇİNDEKİLER
SI BİRİM SİSTEMİ 5
ÖLÇME VE HATA HESAPLARI 9
GRAFİKLER 15
DENEY 1 KUVVET 19
DENEY 2 TORK 25
DENEY 3 SERBEST DÜŞME 33
DENEY 4 DÜZGÜN HIZLANAN DOĞRUSAL HAREKET 37
DENEY 5 EĞİK DÜZLEMDE HAREKET 41
DENEY 6 SÜRTÜNME KATSAYISININ BELİRLENMESİ 45
DENEY 7 ESNEK VE ESNEK OLMAYAN ÇARPIŞMA 51
DENEY 8 MENZİLİN FIRLATMA AÇISINA GÖRE DEĞİŞİMİ ve
ENERJİNİN KORUNUMU 57
DENEY 9 AÇISAL HIZIN ÖLÇÜLMESİ 65
DENEY 10 YAYLI SARKAÇ 70

4
NASIL ÇALILŞMALISINIZ?
Fizik Laboratuvarında başarılı olmak için;
1. Laboratuvara gelmeden önce yapacağınız deneyle ilgili bilginizi
artırmak için kaynaklara başvurun, araştırma yapın,
2. BU föyün ilk üç bölümünü dikkatlice okuyunuz. Tüm deneylerde burada
söz edilen bilgilere ihtiyacınız olacağını unutmayın,
3. Deneyden önce grup arkadaşlarınızla yapacağınız deney konusunda
görüş alış verişinde bulunun,
4. Deneylerinizi yaparken bir plan çerçevesinde görev bölüşümü yapın,
5. Hesaplamalarınızı yanınızda getireceğiniz bir hesap makinesi yardımıyla
yapın,
6. Grafiklerinizi çizerken özenli davranın ve bunu alışkanlık haline getirin,
7. Çalışmalarınız sırasında ihtiyaç duyduğunuzda görevlilerin yardımına
başvurun ve onların bilgisi dışında cihazları kullanmayın,
8. Laboratuvardaki tüm araç ve gereçleri kullanırken özenli davranın ve
dikkatli olun,
9. Deney sonuçlarınızı görevli öğretim elemanlarına onaylatın ve
gerektiğinde görevli öğretim elemanı sizden deneyi tekrar yapmanızı
istediğinde deneyi tekrarlayın.
10. Laboratuvardan ayrılmadan önce deney masanızı düzenli ve temiz
bırakmaya özen gösterin.
Çalışmalarınızda başarılar dileriz.

5
SI BİRİM SİSTEMİ
SI birim sistemindeki özelliklerin incelenmesi
Fiziksel bir büyüklük kendisine benzer bir standartla kıyaslanarak ölçülür. Standart
olarak seçilen fiziksel büyüklüğe ise birim adı verilir. Ölçme sonucunda fiziksel
büyüklük, standardın katları olarak birimi ile birlikte ifade edilir. Bir başka deyişle, her
fiziksel büyüklük birimi ile birlikte ifade edilmelidir.
İnsanlar ölçme yapmaya her zaman ihtiyaç duymuşlardır. Bunu yaparken de
yaşadıkları coğrafyanın özelliklerine ve kültürlerine bağlı olarak farklı birim sistemleri
kullanmışlardır. Örneğin ülkemizde uzunluk ölçmek için eskiden arşın, endaze; kütle
ölçmek için ise dirhem ve okka kullanılırdı. Toplumlar arası ticari ve bilimsel alış-
verişler arttıkça, toplumların farklı birim sistemi kullanmaları sorun yaratmaya başladı.
Bu durumu çözmek amacı ile 1875 yılında bilim çevreleri tarafından çalışmalar
başlatıldı. 1960 yılında Uluslararası Ağırlık ve Ölçüler Genel Konferası’nda Uluslararası
Birim Sistemi oluşturuldu.
Uluslararası Birim Sistemi (SI), üç ayrı nitelikte birimden oluşur. Bunlar temel
büyüklükler, yardımcı büyüklükler ve türetilmiş büyüklüklerdir. SI birim sisteminin
temel büyüklükleri yedi tanedir. Bunların adları, birimleri ve birimlerinin sembolleri
Çizelge 1’de verilmiştir.
Çizelge 1 SI Temel birimleri
Büyüklük Birim Sembol
uzunluk metre m
kütle kilogram kg
zaman saniye s
akım şiddeti amper A
sıcaklık kelvin K
aydınlanma şiddeti kandela cd
madde miktarı mol mol
AMAÇ
GENEL BİLGİ

6
SI birim sisteminin yardımcı büyüklükleri ise düzlem açı ve uzay açıdır(Çizelge 2). Fizikte
kullanılan diğer büyüklükler ise türetilmiş büyüklüklerdir. Bunların adları, birimleri ve
birimlerinin sembolleri Çizelge 3’de gösterilmiştir.
Çizelge 2. SI yardımcı birimleri
Büyüklük Birim Sembol
düzlem açı radyan rad
katı açı steradyan sr
Çizelge 3. SI türetilmiş birimleri
Büyüklük Birimin Özel Adı Sembolü
yüzey - m2
hacim - m3
frekans hertz s-1
yoğunluk - kg.m-3
hız - m.s-1
ivme - m.s-2
açısal hız - rad.s-1
açısal ivme - rad.s-2
kuvvet newton N
iş, enerji joule J
momentum - kg.m.s-1
itme - N.s
basınç pascal Pa
kuvvet momenti - N.m
eylemsizlik momenti - kg.m2
açısal momentum - kg.m2.rad-1.s-1
elektrik yükü coulomb C
elektrik alan - N.C-1
elektrik potansiyel volt V
sığa farad F
direnç ohm Ω
magnetik akı weber Wb
magnetik alan şiddeti tesla T
ışık akısı lümen lm
aydınlanma lüx lx

7
SI birim sisteminde çok büyük ya da çok küçük büyüklüklerin daha kolay bir gösterimi
de mümkündür. Bunun için büyüklüklerin önüne çarpanlar getirilebilir. Bu da gösterim
kolaylığı sağlar. Çizelge 4’de ön çarpanlar, sembolleri ve değerleri bulunmaktadır.
Çizelge 4. SI’da ön çarpanlar
Ön ek Sembol Değeri
exa E 1018
peta P 1015
tera T 1012
giga G 109
mega M 106
kilo k 103
hekto h 102
deka da 10
birim 1 1
desi d 10-1
santi c 10-2
mili m 10-3
mikro 10-6
nano n 10-9
piko p 10-12
femto f 10-15
atto a 10-18
8

9
ÖLÇME VE HATA HESAPLARI
1. Ölçme bilgisinin ve hata hesabının incelenmesi
Bir fiziksel büyüklüğün birim adı verilen belli bir standartla kıyaslanmasına ölçme adı
verilir. Büyüklüğün ölçülmesinin sonucu, bu birimin katları olarak ifade edilir. Fiziksel
büyüklüklerin SI birim sistemindeki birimleri bir önceki bölümde verilmişti.
Ölçme işlemlerinin gerçekleştirilebilmesi için ölçü aletleri geliştirilmiştir. Bir ölçü aleti
ile, ölçme işleminin sonucunda, ölçülen fiziksel büyüklüğün şiddeti bulunur. Bu ise bir
sayı ve bir birim ile ifade edilir.
Geliştirilmiş ölçü aletleri, temel büyüklüklerin yanı sıra, türetilmiş büyüklükleri de
ölçebilir. Örneğin ampermetre, akım şiddeti temel büyüklüğünü ölçerken, voltmetre,
türetilmiş potansiyel farkı ölçer.
Fiziksel ölçü aletlerinin sahip olmaları gereken özelliklere göre üç başlık altında
sınıflandırabiliriz:
Duyarlık: Ölçü aleti, yapılacak ölçümlere göre yeterli duyarlıkta olmalıdır.
Başka bir deyişle, kuyumcu terazisiyle, un tartamazsınız.
Doğruluk: Ölçü aletinin sıfır ayarı (kalibrasyon işlemi) ve göstergenin
bölümlenmesi doğru yapılmış olmalıdır.
Tutarlılık: Bir büyüklüğün ölçü aleti ile yapılan ölçmesinin her tekrarlanışında
aynı sonuç bulunmalıdır.
Bir ölçü aletinin göstergesindeki en küçük bölmeye ölçek birimi denir. Örneğin
milimetre bölmeli bir cetvelde ölçek birimi milimetredir. Bir ölçü aletiyle yapılan her
ölçmede çeşitli hatalardan dolayı, ölçülen fiziksel büyüklüğün gerçek değerine bir
yaklaşım elde edilir. Kullanılan ölçü aletinin ölçek birimi, ölçmenin duyarlılığını
etkileyen önemli bir etkendir. Ölçme birimi ne kadar küçük ise, ölçme o kadar hassas
olur.
AMAÇ
GENEL BİLGİ
10
Fiziksel olarak ölçülen her büyüklük az ya da çok hatalıdır. Ölçülen bir büyüklüğün
gerçek değerinden olan farkına ölçü hatası denir. Yapılan bir ölçme işleminin hata
sınırları mutlaka belirtilmelidir.
Ölçü alınırken karşılaşılan hataları genellikle
Sistematik hatalar
Rastgele hatalar
olmak üzere iki başlık altında inceleyebiliriz.
Sistematik Hatalar: Kullanılan ölçü aletinden, kullanıcıdan ve bazı dış etkenlerden
kaynaklanan hatalardır. Daima aynı yönde ortaya çıkan ve tüm alınan ölçümlerin
gerçek değerden küçük ya da büyük ölçülmesine neden olan hatalardır. Kullanılan
ölçme aleti kısmen bozuk veya iyi kalibre edilmemiş ise, sonuç sistematik hatalıdır. Bu
hataya kalibrasyon hatası da denir. Ölçü aletine tam karşıdan bakılmalıdır. Ölçü aletine
tam karşıdan, dik bakılmadığında, paralaks hatası oluşur.
Rastgele hatalar: Ölçme anında önceden tedbiri alınmayan ve ölçme sonuçlarını geçici
olarak etkileyen olaylardan oluşan hatalardır. Şehir voltajındaki ani değişimler, ortam
sıcaklığındaki değişimler, rastgele hatalara örnek verilebilir. Deney verilerinde ortalama
değerden çok fazla sapma gösteren veriler, bu tür rastgele hatalardan
kaynaklandığından, hesaba dahil edilmezler.
Fiziksel ölçmelerde elde edilen sayıların son basamağı tahmine dayanır. Bu nedenle
son basamak şüphelidir. Ancak büyüklük hakkında bilgi verdiği için de anlamlıdır.
Anlamlı rakamlar kullanılırken şu hususlara dikkat edilmelidir:
i. Bir ölçü sonucu olarak verilen sayının solundaki sıfırların önemi yoktur. Bu tip
sayılardaki anlamlı rakam adedi, soldaki sıfırlar dışında kalan rakam adedi kadardır.
ii. Bir ölçü sonucu olarak verilen sayının sağındaki sayılar ise anlamlıdır.
Fizikte genellikle yapılan ölçüm sonuçları bir takım hesaplamalarda kullanılır. Bu
yüzden hesaplama yapılırken ölçüm sonuçlarındaki anlamlı rakamların kullanılması
nedeniyle, anlamlı olmayanlar hesaba katılmazlar. Anlamlı rakamlarla işlem yapılıp,
hesap sonucunda elde edilen sayıdaki şüpheli rakama göre bir yuvarlama yapılır. Bu
yuvarlamada anlamlı rakamlardan sonra gelen ilk anlamsız rakam:
i. 5 den küçük ise son anlamlı rakam aynen bırakılır
ii. 5 ve 5 den büyük ise son anlamlı rakam bir artırılarak yazılır.

11
Çeşitli duyarlılıktaki aletlerle yapılan uzunluk ölçmesinde 24,686m ve 2,34m değerleri
okunuyor. Bu değerlerin toplam ve farkını hesaplayınız.
Çözüm
Ölçme sonuçlarındaki şüpheli rakamı * ile imleyerek toplama işlemini;
m*6*02,2734,2*686,24 (1)
şeklinde yazabiliriz. Bu işleme göre ilk şüpheli rakam 2, ilk anlamsız rakam 6 dır.
Anlamsız rakam 5 den büyük olduğundan yuvarlamadan sonra toplamın sonucu
27,03m olarak verilir.
Şimdi de çıkarma işlemini;
m*6*34,2234,2*686,24 (2)
şeklinde yazabiliriz. Bu işleme göre ilk şüpheli rakam 4 ve ilk anlamsız rakam 6 dır.
Anlamsız rakam 5 den büyük olduğundan yuvarlamadan sonra çıkarmanın sonucu
22,35m olarak elde edilir.
a=5,34cm ve b=124,2cm ise, bu iki anlamlı sayının çarpımını bulunuz.
Çözüm
*8*2*2*,663*)34,5(*)2,124( (3)
Bu işlemde ilk şüpheli rakam 3 ve ilk anlamsız rakam 2 olduğundan yuvarlama sonucu
663cm2 bulunur.
Bölme işleminde de benzer yöntem uygulanır. Bölünen sayıdaki ilk şüpheli rakama
kadar, bölümdeki sayının rakamlarına * imi konmaz. Böylece ilk şüpheli rakam
yuvarlanarak bölme işleminin sonucu yazılır.
a=195,15 ve b=1,5 ise a/b işlemini anlamlı rakamlarla hesaplayınız.
Çözüm
130*0*15*195155,115,195 (4)
Bu işlemde ilk şüpheli rakam 0 olduğundan, sonuç 130 olarak yazılabilir.
ÖRNEK
ÖRNEK
ÖRNEK

12
Önceden de belirtildiği üzere hiçbir zaman gerçek değeri bulamayız. Ancak deneydeki
hataları en aza indirgeyerek gerçek değere çok yakın sonuçlar elde edebiliriz.
Deneyde ölçme işlemi bir kez yapılmış ise, bu ölçmedeki hata kullanılan aletin
göstergesindeki ölçek biriminin ½ sini geçmeyecek şekilde tahmin edilebilir. Ölçek
birimi milimetre olan bir cetvelle yapılan ölçmede uzunluk 7,63cm bulunduğunda,
hata 0,2mm tahmin edilmişse, bu ölçme sonucu
cm)02,063,7(x (5)
şeklinde yazılmalıdır. Eğer deney sırasında yapılan ölçmeler birden fazla ise, aşağıdaki
istatistik hesaplamaların yapılması gerekir.
Gerçek değeri xo olan bir büyüklük için n kez yapılan ölçme sonuçları x1, x2, x3,…,xn
olsun. Bu ölçümlerin ortalama değeri;
n
x
n
x...xxxx
n
1i
i
n321
(6)
ile bulunur. Bu ölçünün ortalama değerden sapması di ise,
xxd ii (i=1, 2, 3, …, n) (7)
dir. di değerine ölçü sapması denir.
x ise mutlak hata olarak adlandırılır. Mutlak hata hesaplanırken, ölçü sapmasından
da yararlanılır:
)1n(n
d
)1n(n
d...ddddx
n
1i
2i2
n24
23
22
21
(8)
Sonuçta bir ölçme işleminin sonucunda elde edilen ölçüm
xxx (9)
şeklinde ifade edilmelidir. Bunun anlamı şudur; ölçülen büyüklüğün değeri xxx
ile xxx değerleri arasında kalmalıdır. Kalmıyor ise deney düzeneğinde
sistematik bir hata vardır sonucu çıkarılabilir.
Yapılan ölçme işlemlerinin duyarlılığı ise, bağıl hata kavramı ile ifade edilir.
Bağıl hata x
x eşitliği ile elde edilir.

13
Ölçek birimi (1/5)s olan kronometre ile yapılan ölçmede, kronometre 14,63 s değerini
gösteriyor. Ölçmedeki hata ölçek biriminin 2/5’i olarak tahmin edildiğine göre, ölçme
işleminin sonucunu bulunuz.
Çözüm
Bir kez yapılan ölçmedeki hata 2/5 olarak tahmin edildiğine göre,
08,025
2
5
2
5
1x
elde edilir. Buna göre ölçme işleminin sonucu,
t=(14,63 0,08)s
bulunur.
Ölçek birimi mm olan bir cetvelle yapılan uzunluk ölçülmesinde,
x1=7,13cm, x2=7,15cm, x3=7,16cm, x4=7,12cm, x5=7,14cm
değerleri elde ediliyor. Bu ölçme işleminin sonucu nasıl ifade edilmelidir?
Çözüm
Ölçme işlemi birden fazla tekrarlandığı için istatistiksel hesaplama yöntemi izlenmelidir.
Ortalama değer Eşitlik (6)’dan,
cm14,7
5
14,712,716,715,713,7x
bulunur. Eşitlik (7)’den
0d
cm00,014,714,7xxd
10.4d
cm02,014,712,7xxd
10.4d
cm02,014,716,7xxd
10.1d
cm01,014,715,7xxd
10.1d
cm01,014,713,7xxd
21
55
424
44
423
33
422
22
421
11
şeklinde hesaplanabilir. Bu durumda mutlak hata değeri Eşitlik (8)’den,
x=0,007cm
ÖRNEK
ÖRNEK

14
bulunur. Bu sayı anlamlı rakamlar bölümündeki değerlendirmelerden hareketle,
x=0,01cm
şeklinde ifade edilebilir. Sonuç olarak yapılan bu beş adet ölçme işleminin sonucu
Eşitlik (9)’dan,
x=(7,14 0,01)cm
olarak bulunur.

15
GRAFİKLER
1. Grafik çizimi ve grafiklerin yorumlanması
Grafikler, bağımlı ve bağımsız değişkenler arasındaki matematiksel bağıntıyı ortaya
koyar. Laboratuar çalışmalarının değerlendirilerek bir sonuca ulaşılması ve deney
sonuçlarından matematiksel bağıntılar elde edilmesi için grafiklerden yararlanılır.
Bağımsız değişken, deneyi yapan kişi tarafından değiştirilebilen parametredir. Bağımlı
değişken ise bağımsız değişkene bağlı olarak deney düzeneğinde elde edilen sonuçtur.
Grafik çizilirken öncelikli olarak bir çizelge oluşturulmalıdır. Bu çizelgede bağımsız
değişkenler sol sütuna, bağımlı değişkenler sağ sütuna yazılmalıdır. Daha sonra
bağımsız değişkenler yatay eksene, bağımlı değişkenler düşey eksene olmak üzere
çizelgedeki değerler grafik eksenlerine yerleştirilir. Her bir eksen üzerindeki karşılıklı
değerler, eksenlere dik doğrularla birleştirilir. Bu dik doğruların kesişme noktaları tespit
edilir ve bu noktalar bir eğri ile
birleştirilir.
Genellikle grafiği oluşturan eğrinin
biçimi, bağımsız ve bağımlı
değişkenler arasında olan
matematiksel bağıntıyı gösterir. Bu
bağıntıları dört ana başlık altında
toplayabiliriz:
i. Doğrusal değişim grafikleri
Bir doğrusal denklemin en genel
biçimi
y=mx+n
şeklindedir. Burada m ve n sabitler, x bağımsız değişken, y ise bağımlı değişkendir. Bu
tür bir denklemin grafiği Şekil 1’deki gibidir.
AMAÇ
GENEL BİLGİ
Şekil 1. Doğrusal (lineer) değişim grafiği

16
Bu tür grafiklerde eğim oldukça önemlidir. Eğimi bulmak için eğri üzerinde herhangi iki
nokta alınır ve bu noktaların eksenler üzerindeki izdüşümleri oluşturulur. Daha sonra
tanjant fonksiyonu ile eğrinin eğimi bulunur.
ii. Doğru Orantılı Değişim Grafiği
Doğru orantılı değişim grafiği,
değişkenlerden birinin artması
(ya da azalması) durumunda,
diğerinin de buna bağlı olarak,
artması (ya da azalması)
demektir. Bu tür bir değişimde,
değişkenlerden birinin değeri iki
katına çıkarsa, diğerinin de
değeri iki katına çıkacak
anlamına gelir. Doğru orantılı
değişimin genel ifadesi
y=mx
dir. Doğru orantılı değişimin
grafiği daima orijinden geçen bir
doğru çizgidir. Doğru orantılı
değişimin grafiği Şekil 2’dekine
benzerdir.
iii. Ters Orantılı Değişim
Grafiği
İki değişkenin değerleri birbiri ile
ters orantılı olarak değişiyor ise,
iki durum söz konusudur.
i. Bir değişkenin değeri artarken,
diğerinin değeri azalır,
ii. Bir değişkenin değeri
azalırken, diğerinin değeri artar.
Ters orantılı değişim için genel
ifade ise
x
ky
Şekil 2. Doğru orantılı değişim grafiği
Şekil 3. Ters orantılı değişim grafiği

17
dir. Burada k sabit, x bağımsız değişken, y ise bağımlı değişkendir. Bir gazın sabit sıcaklık
altında basıncı ile hacmi arasındaki bağıntı, ters orantılı değişime iyi bir örnektir. Ters
orantılı değişim grafiği Şekil 3’de görüldüğü gibidir.
Grafiğimiz bir paraboldür. Grafiğin parabol olması, y nin x ile ters orantılı değiştiğini
gösterir.
iv. Bir Değişkenin, Diğerinin Karesiyle Değişiminin Grafiği
Böyle bir değişim için genel ifade
2kxy
dir. Burada k sabit, x bağımsız değişken, y ise bağımlı değişkendir. Şekil 4’de bu tür bir
değişimi gösteren grafiktir.
Şekil 4. Bir değişkenin, diğerinin karesiyle değişiminin grafiği

18

19
DENEY 1 KUVVET
1. Makara, ip ve kütlelerden oluşan basit bir düzenekte Newton yasalarını
uygulamak.
Kuvvet, en genel tanımıyla bir cisme uygulandığında onun hareketini değiştiren veya
cisim üzerinde bir şekil değişikliği oluşturan etki olarak tanımlanır. Kuvvet vektörel bir
büyüklüktür ve ortaya çıkış nedenlerine göre 4 sınıfa ayrılır; Gravitasyonel kuvvetler,
Elektromanyetik Kuvvetler, Zayıf Kuvvetler, Güçlü Kuvvetler.
Sir Isaac Newton bir cismin hareketini üç temel yasa ile açıklamıştır.
Newton’un Birinci Hareket Yasası: Bir cisim üzerine etkiyen kuvvetlerin vektörel
toplamı sıfırsa, cisim duruyorsa durmasına, hareket ediyorsa sabit hızla
hareketine devam eder.
Newton’un İkinci Hareket Yasası: m kütleli bir cismin herhangi bir t anındaki
hızı ise, o andaki momentumu )(P
;
eşitliği ile tanımlanır. Eğer kütle sabitse, cisim üzerine o anda etkiyen kuvvet
momentumun değişim hızına eşittir. Herhangi bir anda cisim üzerine etkiyen
kuvvet, cismin kütlesiyle, o andaki cismin ivmesinin çarpımına eşittir:
Newton’un Üçüncü Hareket Yasası: İki cisim etkileştiğinde birinci cismin ikinci cisme
uyguladığı kuvveti, ikinci cismin birinci cisme uyguladığı kuvvetiyle eşit büyüklükte
ve zıt yöndedir.
Kuvvet vektörel bir büyüklük olduğundan, büyüklüğü, yönü, doğrultusu ve uygulanma
noktasıyla tanımlanır ve bir okla gösterilir. Okun uzunluğu, istenilen herhangi bir ölçeğe
600
AMAÇ
GENEL BİLGİ
Şekil 1. Bir kuvvetin büyüklüğünün ve yönünün
gösterilmesi

20
göre, kuvvetin büyüklüğünü gösterecek biçimde seçilir. Şekil 1 ‘de görüldüğü gibi
düşeyle 60o’lik açı yaparak etkiyen 8 N’luk bir kuvveti göstermek için önce düşey
doğrultuyu belirtmek üzere bir doğru
çizilir, sonra da kuvvetin doğrultusunu
göstermek için ilk doğrultuyla 60o’lik açı
yapan ikinci bir doğru çizilir. Son olarak
ölçekli biçimde okun uzunluğu belirlenir.
Örneğin ölçek olarak 2N için 1 cm seçilirse,
Şekil 1’deki ok 4 cm uzunluğunda
olmalıdır. Okun yönü, kuvvetin de
yönüdür. Kuvvet gibi, herhangi bir vektörel
büyüklük de ölçekli olarak çizilen bir okla
gösterilebilir.
Kuvvet konusunda en belirgin uygulamalar
basit makinelerde görülebilir. Sabit makara
ve hareketli makara basit makinelere
bilinen örneklerdir. Bir ip, bağlandığı
cisme, kendi gerilimine eşit bir kuvvet
uygular. İpin gerilimi başka bir yüzeye sürtünmediği sürece, her noktasında aynıdır. Bir
sabit makara, ipin gerilimini değiştirmeden yönünü değiştirir. Hareketli makara ise,
kendisine uygulanan toplam teğetsel kuvvet sıfır oluncaya kadar döner.
Sabit bir makara üzerindeki bir ipin ucuna W ağırlığında bir yük asılırsa, yükü dengede
tutmak için yönü aşağıya doğru ve büyüklüğü F=W olacak şekilde kuvvet uygulamak
gerekir (Şekil 2a).
Eğer Şekil 2b’deki gibi bir sabit makara ve bir hareketli makaradan oluşan düzeneğe
aynı W ağırlığında bir yük asılırsa, yükü dengede tutmak için yönü aşağıya doğru ve
büyüklüğü F=W/2 olacak şekilde kuvvet uygulamak gerekir. Böyle bir sistemde n tane
hareketli makara ile yapılırsa yükü dengede tutmak için yönü aşağıya doğru ve
büyüklüğü F=W/(2n) olacak şekilde kuvvet uygulamak gerekir (Şekil 2c).
1. Çevrenizde etkilerini gördüğümüz kuvvetleri hangi tür kuvvet sınıfında
değerlendirirsiniz?
2. Bir cismin dengede olma koşulları nelerdir?
a) b) (c)
Şekil 2. İpler, makaralar ve ağırlıklardan oluşan
birkaç düzenek
ÇALIŞMA SORULARI
21
3. Aralarındaki açılar ne olursa olsun, 12N, 7N ve 3N luk üç kuvvetin toplamının sıfır
olamayacağını gösteriniz.
4. Sanki kuvveti tanımlayınız. Çevrenizden örnek veriniz.
Yaylı terazi (dinamometre)
Makaralar
Çeşitli kütleler.
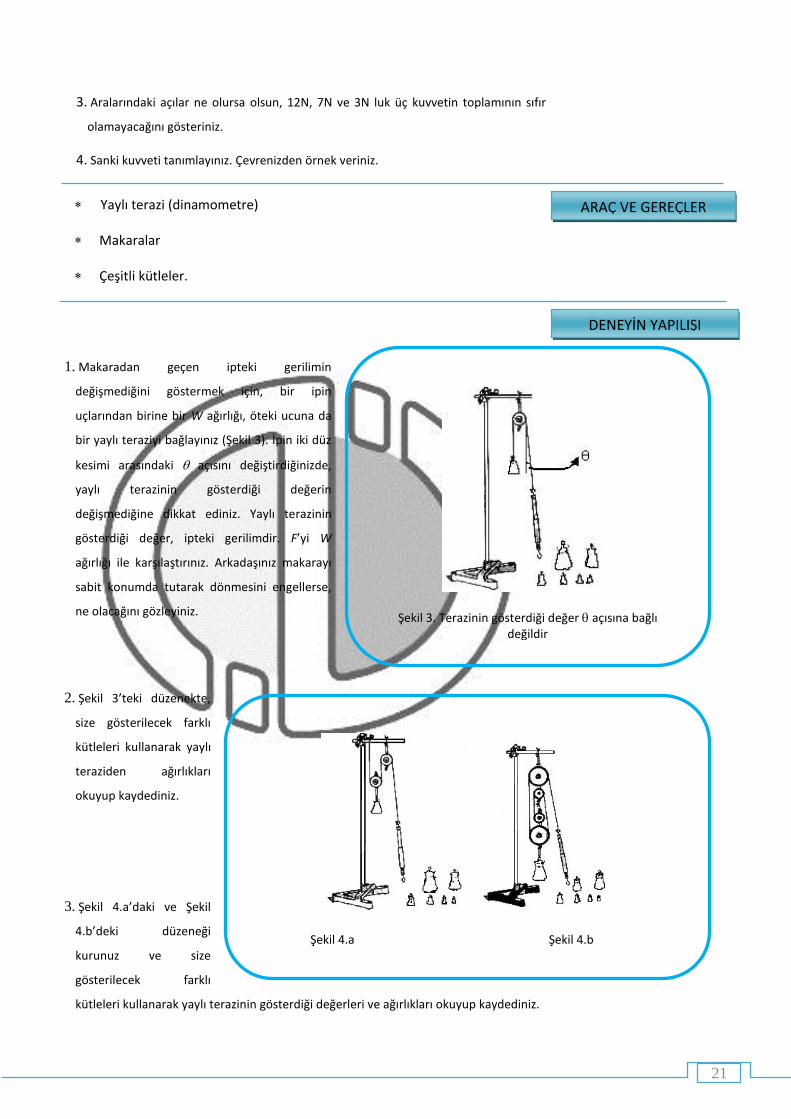
1. Makaradan geçen ipteki gerilimin
değişmediğini göstermek için, bir ipin
uçlarından birine bir W ağırlığı, öteki ucuna da
bir yaylı teraziyi bağlayınız (Şekil 3). İpin iki düz
kesimi arasındaki açısını değiştirdiğinizde,
yaylı terazinin gösterdiği değerin
değişmediğine dikkat ediniz. Yaylı terazinin
gösterdiği değer, ipteki gerilimdir. F’yi W
ağırlığı ile karşılaştırınız. Arkadaşınız makarayı
sabit konumda tutarak dönmesini engellerse,
ne olacağını gözleyiniz.
2. Şekil 3’teki düzenekte,
size gösterilecek farklı
kütleleri kullanarak yaylı
teraziden ağırlıkları
okuyup kaydediniz.
3. Şekil 4.a’daki ve Şekil
4.b’deki düzeneği
kurunuz ve size
gösterilecek farklı
kütleleri kullanarak yaylı terazinin gösterdiği değerleri ve ağırlıkları okuyup kaydediniz.
ARAÇ VE GEREÇLER
DENEYİN YAPILIŞI
Şekil 3. Terazinin gösterdiği değer açısına bağlı değildir
Şekil 4.a Şekil 4.b

22
1.Şekil 3’teki düzenekte, farklı kütleler için yaylı teraziden okuduğunuz değerleri
aşağıdaki çizelgeye kaydediniz. Yaylı terazinin bulunduğu ipteki gerilimi, W ve
cinsinden hesaplayınız. Bulduğunuz sonucu, teraziden okuduğunuz değerle
karşılaştırınız.
Çizelge 1. m kütleli cisimleri dengede tutmak için gereken kuvvet büyüklüğü
m (kg) W (N) F (N)
2. Şekil 4a’daki düzenekte, farklı kütleler için yaylı teraziden okuduğunuz değerleri
aşağıdaki çizelgeye kaydediniz. Yaylı terazinin bulunduğu ipteki gerilimi W cinsinden
hesaplayınız. Bulduğunuz sonucu Şekil 3’teki düzeneğin sonuçlarıyla karşılaştırınız.
Çizelge 2. m kütleli cisimleri dengede tutmak için gereken kuvvet büyüklüğü
m (kg) W (N) F (N)
3.Şekil 4.b’deki düzenekte, farklı kütleler için yaylı teraziden okuduğunuz değerleri
aşağıdaki çizelgeye kaydediniz. Yaylı terazinin bulunduğu ipteki gerilimi, W cinsinden
hesaplayınız. Bulduğunuz sonucu Şekil 3 ve Şekil 4a’daki düzeneğin sonuçlarıyla
karşılaştırınız.
Çizelge 3. m kütleli cisimleri dengede tutmak için gereken kuvvet büyüklüğü
m (kg) W (N) F (N)
VERİLER VE HESAPLAMALAR
23
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
Öğrenci deneyi başarıyla tamamlamıştır.
imza
Görevli Öğretim Elemanı
1. Uygulamalı Temel Fizik, Prof. Dr. Kudret Özdaş, Prof. Dr. Ertuğrul
Yörükoğulları, Bilim Teknik Yayınevi, 1985, Eskişehir.
2. Fizik-Mekanik ve Isı, E. Hausmann, E.S. Slack, Berksoy Matbaası,
1960, İstanbul.
3. Üniversite Fiziği, H.D.Young, R.A.Freedman, Pearson, 2009,
İstanbul.
DENEYİN YORUMU
ÇALIŞMA KAYNAKLARI

24

25
DENEY 2 TORK
1. Cisimlerin denge koşulları incelemek
2. Tek ve çift kollu kaldıraçta vektörel olarak kuvvetlerin toplamasını öğrenmek
3. Denge halindeki bir sistemde bilinmeyen kuvvetleri bulmak
Eylemsiz gözlem çerçevesindeki bir O noktasına göre r
yer değiştirme vektörüyle
tanımlanan noktaya uygulanan F
kuvvetinin O noktasına göre torku (çevirtmesi,
döndürümü), r
ile F
nin vektörel çarpımı şeklinde tanımlanır
Fxr
(1)
, vektörel çarpımın bir sonucu olarak r
ile F
nin oluşturduğu düzleme dik olacak
ve yönü, sağ el kuralına göre (ya da sağ vida kuralına göre) sağ elin parmakları r
den
F
ye doğru kıvrıldığında başparmağın gösterdiği yön olacaktır. Eşitlik 1’de verilen
vektörel ifadenin büyüklüğü ise
sinrF (2)
eşitliği ile verilir. Burada , r
ile F
arasındaki açıdır (Şekil 1).
Eylemsiz bir gözlem çerçevesinden
baktığımızda bir cismin dengede olması için:
1) Cismin kütle merkezinin çizgisel ivmesi sıfır
olmalıdır.
2) Cismin gözlem çerçevesindeki herhangi bir
durağan eksene göre açısal ivmesi sıfır
olmalıdır.
Dengenin birinci koşulunun sağlanabilmesi,
yani cismin kütle merkezinin çizgisel bir
ivmesi olmaması için, cismin üzerine etki eden
kuvvetlerin bileşkesi sıfır olmalıdır. Buna göre,
AMAÇ
GENEL BİLGİ
Şekil 1.
, r
ve F
arasındaki yönlerin ilişkisi
Şekil 1. Bir kuvvetin büyüklüğünün ve yönünün gösterilmesi

26
0.............321 FFFF
(3)
yazabiliriz.
Dengenin ikinci koşulunun sağlanabilmesi, yani cismin seçilen eylemsiz gözlem
çerçevesindeki durağan bir eksene göre bir açısal ivmesinin olmaması için, cisme
etkiyen dış torkların bileşkesinin sıfır olması gerekir. Buna göre,
0.............321
(4)
olmalıdır.
PARALEL KUVVETLERİN BİLEŞKESİ:
a. Paralel aynı yönlü kuvvetlerin bileşkesi:
Şekildeki gibi aynı yönlü paralel kuvvetlerin bileşkesi
21 FFR kadardır. Uygulama noktası ise moment
alınarak bulunabilir. O noktasına göre moment alınırsa;
2211 xFxF (5)
Bu iki kuvvetin bileşkesinin uygulama noktası büyük olan
kuvvete daha yakındır.
b. Paralel zıt yönlü kuvvetlerin bileşkesi:
İki kuvvet şekildeki gibi paralel ve zıt yönlü ise bileşke
büyük kuvvet yönünde ve 21 FFR kadardır.
Bileşke kuvvetin uygulama noktası büyük olan kuvvet
tarafında ve dıştadır. Bu nokta moment alınarak
bulunabilir.
dxFxF 21 (6)
1. Tork nedir? Açıklayınız.
2. Tork’un yönü nasıl belirlenir?
3. Sabit açısal hızla dönen bir cisme etki eden tork nedir?
Şekil 2. Aynı yönlü paralel kuvvetlerin bileşkesi
ÇALIŞMA SORULARI
2F
O x d
R 1F
x1 O x2
1F 2F
R
Şekil 3. Paralel ve zıt yönlü kuvvetlerin bileşkesi

27
Yaylı teraziler (dinamometre)
Kaldıraç
Moment düzeneği
Çeşitli kütleler
I. AŞAMA
1. Deney düzeneğini Şekil 4’e göre kurunuz.
2. x1=48 cm ve x2=24 cm olacak şekilde F1 kuvvetini F2’nin 1,0; 2,0 ve 3,0 N değerleri
için denge konumunu sağlayarak Çizelge 1’i doldurunuz.
3. x1=48 cm ve F2=2,0 N olacak şekilde F1 kuvvetini x2’nin 24, 36,
48 cm değerleri için denge konumunu sağlayarak Çizelge 2’i
doldurunuz.
4. x2=48 cm ve F2=2,0 N olacak şekilde F1 kuvvetini x1’nin 24; 36,
48 cm değerleri için denge konumunu sağlayarak Çizelge 3’ü
doldurunuz.
II. AŞAMA
2. Deney düzeneğini Şekil 5’e göre kurunuz.
3. x1=48cm ve x2=12cm olacak şekilde F1 kuvvetini m2’nin 200,
400 ve 500g değerleri için denge konumunu sağlayarak
Çizelge 4’ü doldurunuz.
4. x1=48cm ve F2=2,0N olacak şekilde F1 kuvvetini x2’nin 12, 24,
36cm değerleri için denge konumunu sağlayarak Çizelge 5’i
doldurunuz.
5. x2=48cm ve F2=1,0N olacak şekilde F1 kuvvetini x1’nin 12, 24,
36cm değerleri için denge konumunu sağlayarak Çizelge 6’yı
doldurunuz.
III. AŞAMA
1. Deney düzeneğini Şekil 6’ya göre kurunuz.
2. Dinamometre her ölçümden önce sıfıra ayarlanmalıdır.
ARAÇ VE GEREÇLER
DENEYİN YAPILIŞI
Şekil 4. I.Aşama deney düzeneği
Şekil 5. II.Aşama deney düzeneği

28
3. Momentin orijin ile kuvvet etki noktası arasındaki uzaklığın fonksiyonu olarak
belirlenmesi için, m=0,1kg, r2=0,12m ve =/2 olacak şekilde r1’in farklı değerleri için
moment değerlerini okuyarak Çizelge 7’yi doldurunuz.
4. Momentin kuvvetin fonksiyonu olarak belirlenmesi için dinamometre pivotun bir
tarafına, ağırlık taşıyıcı diğer tarafına asılmalıdır. Etki noktaları aynı düzlem üzerinde
bulunacak şekilde ayarlanmalı ve değer dinamometreden okunmalıdır (Dinamometre
dik konumunda olmalıdır). r1=0,09m, r2=0,06m ve =/2 olacak şekilde m’in farklı
değerleri için moment değerlerini
okuyarak Çizelge 8’i doldurunuz.
5. Momentin kuvvet ile kuvvetin
etki noktasıyla konum vektörü
arasındaki açının fonksiyonu
olarak belirlenmesi için, ağırlık
taşıyıcı ikinci dinamometre ile
değiştirilmelidir. Bunun üzerine
sabit bir kuvvet ayarlanmalı ve
açıya bağlı olarak değeri
değişmelidir. Diğer taraftan
dengeye getirebilecek kuvvet ve
açı okunmalıdır. Daha iyi bir
ölçüm için kuvvet sabitlenir. Disk
sabit bırakılır ve diğer taraftaki
dinamometre ile denge sağlanır.
r1=r2=0,09 m ve f2=1 N olarak şekilde ’nın farklı değerleri için moment değerlerini
okuyarak Çizelge 9’u doldurunuz.
Çizelge 1.
F2 (N) 2 (Nm) F1 (N) 1 (Nm)
1,0
2,0
3,0
VERİLER VE HESAPLAMALAR
Şekil 6. Moment deney düzeneği
Şekil 3. Paralel ve zıt yönlü kuvvetlerin bileşkesi

29
Çizelge 2.
Çizelge 3.
II. AŞAMA
Çizelge 4.
Çizelge 5.
Çizelge 6.
x2 (cm) 2 (Nm) F1 (N) 1 (Nm)
24,0
36,0
48,0
x1 (cm) F1 (N) 1 (Nm) 2 (Nm)
24,0
36,0
48,0
m2 (g) F2 (N) 2 (Nm) F1 (N) 1 (Nm)
200
400
500
X2 (cm) F1 (N) 1 (Nm) 2 (Nm)
12,0
24,0
36,0
x1 (cm) F1 (N) 1 (Nm) 2 (Nm)
12,0
24,0
36,0

30
III. AŞAMA
Çizelge 7.
Çizelge 8.
Çizelge 9.
r1 (cm) (Nm)
m (kg) (Nm)
(rad) sin (Nm)

31
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
Öğrenci deneyi başarıyla tamamlamıştır.
imza
Görevli Öğretim Elemanı
1. Uygulamalı Temel Fizik, Prof. Dr. Kudret Özdaş, Prof. Dr. Ertuğrul
Yörükoğulları, Bilim Teknik Yayınevi, 1985, Eskişehir.
2. Fizik-Mekanik ve Isı, E. Hausmann, E.S. Slack, Berksoy Matbaası, 1960,
İstanbul.
3. Üniversite Fiziği, H.D.Young, R.A.Freedman, Pearson, 2009, İstanbul.
DENEYİN YORUMU
ÇALIŞMA KAYNAKLARI
32

33
DENEY 3 SERBEST DÜŞME
1. Bu deneyin amacı, yerçekimi ivmesinin en doğru şekilde
belirlenebilmesidir.
Sabit ivmeli doğrusal harekete en iyi örnek yeryüzüne doğru düşmekte olan bir cismin
hareketidir. Hava sürtünmesinin olmadığı (veya ihmal edildiği) durumlarda, ağırlıkları,
yapıları ve şekilleri ne olursa olsun her cismin, ister herhangi bir yükseklikten serbest
bırakılsın, ister yukarıya veya aşağıya atılsın dünya yüzeyine doğru aynı ivme ile
düştüğü bilinmektedir (Şekil 1). Hava sürtünmesinin olmadığı ve yerden yüksekliğe göre
yerçekimi ivmesindeki değişmelerin ihmal edilip hesaba katılmadığı harekete, serbest
düşme adı verilir.
Serbest düşen bir cismin ivmesine yerçekimi ivmesi adı verilir ve g ile gösterilir. SI
birim sistemindeki birimi m/s2 dir. Yeryüzeyi üzerinde yerçekimi ivmesinin şiddeti
yaklaşık olarak 9,8 m/s2 (veya 980 cm/s2),
yönü ise dünyanın merkezine doğrudur.
Yerçekimi ivmesi; yer yüzeyinden olan
uzaklığa ve enleme bağlı olarak değişir.
Hava direncini ihmal eder ve yerçekimi
ivmesinin değişmediğini kabul edersek,
serbest düşen bir cismin hareket
denklemleri için aşağıda verilen sabit
ivmeli doğrusal hareket denklemlerini
kullanabiliriz:
tavv yyo
tvvy yyo 2
1
2
2
1tatvy yyo
yavv yyoy 22
AMAÇ
GENEL BİLGİ
g
y0
vo
y0
y0
v0
v0=0 y y y
g g
0 0 0
Serbest
düşme
(a)
Yukarı
doğru düşey
atış
(b)
Aşağı
doğru
düşey atış
(c) Şekil 1.
Şekil 1. Serbest düşme ve düşey atış hareketleri
serbest düşme yukarı doğru aşağı doğru düşey atış düşey atış
34
Bu eşitlikleri kullanırken seçmiş olduğunuz y-ekseni yönündeki vo, v, y, yo, g değerleri
yerlerine (+) işaretli olarak, -y-ekseni yönünde olanlar ise (-) işaretli olarak yerine
yazmalısınız. Bu değişkenlerden hesaplamak istediğiniz (+) işaretli olarak bulunursa
onun yönü seçtiğimiz y-ekseni yönünde, (-) işaretli çıkarsa y-ekseninin tersi yönünde
demektir. Y-ekseninin yönünün yukarıya veya aşağıya doğru seçilmesi keyfidir ve
sonucu etkilemez.
1. Serbest düşen bir parçacık için yer değiştirmenin zamana göre ve hıza göre
değişimini grafik çizerek anlatınız.
2. Serbest düşen bir cismin hareketini açıklayınız.
3. Yerçekimi ivmesi nelere bağlıdır? Açıklayınız.
4. Dünya üzerindeki bir cismin kutuplardaki ve ekvatordaki ağırlıkları niçin farklıdır?
2 adet fotoget
Zaman okuyucu
Cetvel
Değişik kütleli cisimler
1. Deney düzeneği kurulduktan sonra, fotogetler arasındaki h mesafesi ölçülür.
2. Daha sonra birinci cisim üst sensöre en yakın mesafeden serbest bırakılır ve iki fotoget
arasından geçme süresi cihaz yardımı ile okunur.
3. Bu işlem dört kez tekrarlanıp ortalama süre hesaplanır. Bundan sonra h yüksekliği dört
kez değiştirilip dört tane tort değeri fotogetten okunur.
4. Her yükseklik için g yerçekimi ivmesi;
2
2
1gth
eşitliği ile hesaplanır. Bu işlemler ikinci kütle için de tekrarlanır.
5. Her iki kütle için h-t2 grafikleri çizilir ve g ivmesi hesaplanır.
ARAÇ VE GEREÇLER
DENEYİN YAPILIŞI
ÇALIŞMA SORULARI

35
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
Öğrenci deneyi başarıyla tamamlamıştır.
imza
Görevli Öğretim Elemanı
m2
h1=…...m
tı=…… s
t2=……s
t3=……s
t4=……s
tort=…… s g=……m/s2
h2=……m
tı=…… s
t2=……s
t3=……s
t4=……s
tort=…… s g=……m/s2
h3=…...m
tı=…… s
t2=……s
t3=……s
t4=……s
tort=…… s g=……m/s2
h4=…...m
tı=…… s
t2=……s
t3=……s
t4=……s
tort=…… s g=……m/s2
m1
h1=…...m
tı=…… s
t2=……s
t3=……s
t4=……s
tort=…… s g=……m/s2
h2=……m
tı=…… s
t2=……s
t3=……s
t4=……s
tort=…… s g=……m/s2
h3=…...m
tı=…… s
t2=……s
t3=……s
t4=……s
tort=…… s g=……m/s2
h4=…...m
tı=…… s
t2=……s
t3=……s
t4=……s
tort=…… s g=……m/s2
VERİLER VE HESAPLAMALAR
DENEYİN YORUMU

36
1. Uygulamalı Temel Fizik, Prof. Dr. Kudret Özdaş, Prof. Dr. Ertuğrul
Yörükoğulları, Bilim Teknik Yayınevi, 1985, Eskişehir.
2. Fizik-Mekanik ve Isı, E. Hausmann, E.S. Slack, Berksoy Matbaası,
1960, İstanbul.
3. Üniversite Fiziği, H.D.Young, R.A.Freedman, Pearson, 2009,
İstanbul.
ÇALIŞMA KAYNAKLARI

37
DENEY 4 DÜZGÜN HIZLANAN
DOĞRUSAL HAREKET
1. Düzgün doğrusal hareket yapan bir cismin hız ve ivmesinin incelenmesi
İvmeli hareketlerin en basiti, sabit ivmeli doğrusal harekettir. Bu harekette parçacığın
hızı düzgün olarak değişir. Sabit ivmeli harekette her bir zaman aralığındaki ivme
birbirine eşit ve bu ivme değer de ani ivmeye eşittir. t=0 ile herhangi bir t anı arasındaki
zaman aralığı için ortalama ivme
0
0
t
vva xx (1)
olur. Bu ifadeden yararlanarak sabit ivmeli harekette herhangi bir t anındaki hız
atvv xx 0 (2)
yazılabilir. Burada xv0 , cismin t=0 anındaki hızı, yani parçacığın başlangıç hızıdır. a
ivmesi ise cismin hızının birim zamandaki değişim miktarıdır ve bu hareket biçimi için
zamana bağlı değildir. Böylece t zamanı süresince hızın değişme miktarı a.t dir.
Parçacığın başlangıç hızı v0x olduğuna göre Eşitlik (2), parçacığın herhangi bir anlık
hızının başlangıç hızı ile hız değişim büyüklüğünün toplamına eşit olduğunu
göstermektedir.
Bir parçacık hareketinde, hız düzgün olarak değişiyorsa, yani ivme sabitse, herhangi bir
zaman aralığında ortalama hız, zaman aralığının başlangıçtaki ve sonundaki hızların
toplamının yarısına eşittir. t=0 ile t=t zaman aralığı için ortalama hız aşağıdaki şekilde
verilebilir:
2
0 xxx
vvv
(3)
Eşitlik 3 sabit ivmeli olmayan hareketler için geçerli değildir. Sabit ivmeli hareket yapan
parçacığın t=0 anındaki konumu 0xx ise, parçacığın t anındaki konumu x, Eşitlik 4
ile verilir:
tvxx x 0 (4)
AMAÇ
GENEL BİLGİ
38
xv için Eşitlik 3 ve xv için Eşitlik 2 ile verilen ifadelerin kullanılmasıyla, parçacığın x
konumu için aşağıdaki ifade elde edilir:
2
002
1attvxx x (5)
Bazı kinematik problemlerinin çözümünde zaman parametresini kullanmadan parçacık
hızı ile konumu arasındaki ilişkinin bilinmesi istenir. Eşitlik 2’den t çözülerek, Eşitlik 4’de
uygulanırsa, parçacık konumu ile hız arasındaki bağıntı,
a
vvxx xx
2
2
0
2
0
(6)
elde edilebilir. Sabit ivmeli harekette hız ifadesi,
xx vatv 0 (7)
şeklinde elde edilir. Cismin herhangi bir andaki konum ifadesi ise,
00
2
2
1xtvatx x (8)
bulunur.
1. Bir parçacığın hızı sabit ise ivmeli hareket edebilir mi?
2. Hızın ve ivmenin zıt yöne sahip olduğu bir durum mümkün müdür? O halde,
düşüncenizi kanıtlamak için bir hız-zaman grafiği çiziniz.
3. Yol-zaman grafiğindeki ve hız-zaman grafiğindeki eğim ne ifade eder? Açıklayınız.
4. Düzgün hızlanan harekette asılan kütle değiştikçe ivme ne olur? Açıklayınız.
Hava masası sistemi
karbon kağıdı
teksir kağıdı
diskler (puck)
kıvılcım zamanlayıcı (Spark timer)
ARAÇ VE GEREÇLER
ÇALIŞMA SORULARI

39
1. Hava masasının dengeli bir
şekilde yerleştirilmiş
olduğundan emin olun.
2. Karbon kâğıdını ve teksir
kâğıdını düzgün bir şekilde
hava masası üzerine yerleştirin.
3. Kıvılcım zamanlayıcıyı 50 Hz
olarak ayarlayın.
4. Diskleri hava masası üzerine
yerleştirin. Bu deneyde sadece
bir disk kullanılacaktır fakat
elektrik devresinin
tamamlanması için her iki
diskinde masa üzerinde
yerleştirilmiş ve disklerden
hareketli olanın ucuna
belirlenmiş bir kütle bağlayarak
masadan sarkıtılmış şekilde
olmasına özen gösteriniz.
Diskleri Şekil 4.1’de gösterildiği
gibi konumlayabilirsiniz.
5. Kompresörü açtığınızda
diskler ve masa arasındaki
sürtünme azalacak ve deneyde
sürtünme ihmal edilebilecektir.
6. Disklerden biri masa
kenarında sabit dururken diğer
diski hafifçe itin ve aynı
zamanda pedala basın. Pedala
basarak, kıvılcım zamanlayıcıyı
ayarladığımız zaman diliminde teksir kâğıdı üzerine izler bırakacaktır.
1. Elde ettiğiniz izlere ait verilerle yol-zaman grafiğini çiziniz.
2.Elde ettiğiniz izlere ait verilerle hız-zaman grafiğini çiziniz.
3.Elde ettiğiniz izlere ait verilerle ivme-zaman grafiğini çiziniz.
DENEYİN YAPILIŞI
VERİLER VE HESAPLAMALAR
Şekil 4.1. Hava masası üzerinde disklerin yerleşimi
Şekil 3.1
Şekil 2. Teksir kağıdı üzerindeki izlerin okunması

40
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
Öğrenci deneyi başarıyla tamamlamıştır.
imza
Görevli Öğretim Elemanı
1. Uygulamalı Temel Fizik, Prof. Dr. Kudret Özdaş, Prof. Dr. Ertuğrul
Yörükoğulları, Bilim Teknik Yayınevi, 1985, Eskişehir.
2. Fizik-Mekanik ve Isı, E. Hausmann, E.S. Slack, Berksoy Matbaası, 1960,
İstanbul.
3. Üniversite Fiziği, H.D.Young, R.A.Freedman, Pearson, 2009, İstanbul.
DENEYİN YORUMU
ÇALIŞMA KAYNAKLARI
41
DENEY 5 EĞİK DÜZLEMDE HAREKET
1. Eğik düzlemde hareket eden farklı kütlelerdeki cisimlerin hareketlerinin,
farklı eğimlerde incelenmesi.
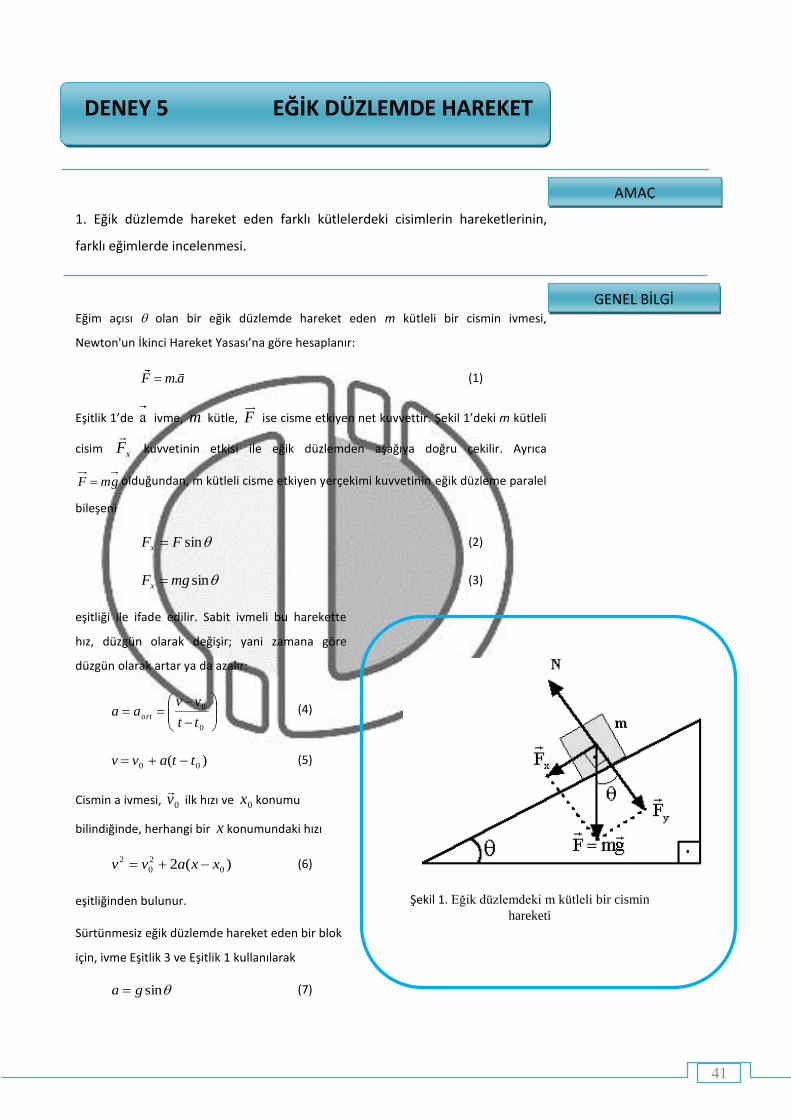
Eğim açısı olan bir eğik düzlemde hareket eden m kütleli bir cismin ivmesi,
Newton'un İkinci Hareket Yasası’na göre hesaplanır:
.F m a (1)
Eşitlik 1’de a ivme, m kütle, F ise cisme etkiyen net kuvvettir. Şekil 1’deki m kütleli
cisim xF
kuvvetinin etkisi ile eğik düzlemden aşağıya doğru çekilir. Ayrıca
gmF olduğundan, m kütleli cisme etkiyen yerçekimi kuvvetinin eğik düzleme paralel
bileşeni
sinFFx (2)
sinmgFx (3)
eşitliği ile ifade edilir. Sabit ivmeli bu harekette
hız, düzgün olarak değişir; yani zamana göre
düzgün olarak artar ya da azalır:
0
0
tt
vvaa ort
(4)
)( 00 ttavv (5)
Cismin a ivmesi, 0v
ilk hızı ve 0x konumu
bilindiğinde, herhangi bir x konumundaki hızı
)(2 0
2
0
2 xxavv (6)
eşitliğinden bulunur.
Sürtünmesiz eğik düzlemde hareket eden bir blok
için, ivme Eşitlik 3 ve Eşitlik 1 kullanılarak
singa (7)
AMAÇ
GENEL BİLGİ
Şekil 1. Eğik düzlemdeki m kütleli bir cismin
hareketi

42
bulunur.
Sürtünmeli bir yüzeyde, sürtünme kuvveti gibi korunumsuz kuvvetlerin yaptığı
iş, kinetik enerjideki değişim ile potansiyel enerjideki değişimin toplamına eşittir. Bir
başka deyişle bu iş mekanik enerjideki değişime eşittir:
Wksuz=(Ks+Us)-(Ki+Ui)=Es-Ei (8)
1. İki yüzey arasındaki sürtünme katsayısını küçültmek için ne gibi yöntemlere
başvurulabilir?
2.Sürtünmeli eğik bir düzlemde hareket eden cisim için kuvvet diyagramını (üzerine
etkiyen kuvvetleri) çiziniz.
3. Eğik düzlem açısının değişmesi ile ivme değeri nasıl değişti? Açıklayınız?
4. Sürtünmeli eğik bir düzlemde hareket eden cismin ivmesini veren ifadeyi elde ediniz.
1 adet ray yatağı
1 adet hava rayı
1 adet hava üreteci
1 adet AC güç kontrolörü
2 adet sayaç
4 adet fotoget
çeşitli kütleler
bağlantı kabloları
7 adet takoz
1. Hava rayının eğimini ayarlayınız.
2. Sayaçları sıfırlayınız ve start konumuna getiriniz.
3. Ray üzerindeki kızağa m kütlesini yerleştirerek hava üretecini çalıştırınız. AC güç
kontrolörünü maksimum konuma ayarlayınız.
ARAÇ VE GEREÇLER
DENEYİN YAPILIŞI
ÇALIŞMA SORULARI
43
4. Kızağı serbest bırakınız, sayaçlardan hız ve ivme değerlerini okuyup Çizelge 1’e
yazınız.
5. Aynı işlemi 2m için tekrarlayınız.
6. Hava rayının eğimini değiştirerek deneyi tekrar ediniz.
Eşitlik 6 ve Eşitlik 5’i kullanarak zaman değerlerini bulunuz. v-t ve x-t grafikleri çiziniz.
Eşitlik 8 yardımıyla sürtünme kuvvetinin yaptığı işi hesaplayınız.
Çizelge 1. m kütleli cisimleri dengede tutmak için gereken kuvvet miktarı
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………………
Öğrenci deneyi başarıyla tamamlamıştır.
İmza
Görevli Öğretim Elemanı
Açı Ө1 Ө2
Kütle Hız İvme Hız İvme
m
2m
VERİLER VE HESAPLAMALAR
DENEYİN YORUMU

44
1. Uygulamalı Temel Fizik, Prof. Dr. Kudret Özdaş, Prof. Dr. Ertuğrul
Yörükoğulları, Bilim Teknik Yayınevi, 1985, Eskişehir.
2. Fizik-Mekanik ve Isı, E. Hausmann, E.S. Slack, Berksoy Matbaası,
1960, İstanbul.
3. Üniversite Fiziği, H.D.Young, R.A.Freedman, Pearson, 2009,
İstanbul.
ÇALIŞMA KAYNAKLARI

45
DENEY 6 SÜRTÜNME KATSAYISININ BELİRLENMESİ
1. Eğik düzlem üzerinde bulunan bir cisim için, F2 normal kuvveti ve eğik
düzleme paralel F1 kuvvetinin, eğim açısının () bir fonksiyonu olarak ölçülmesi
2. Eğik düzlem üzerinde statik sürtünme kuvveti ve düzleme paralel Fx kuvveti
arasındaki dengeden yararlanarak, statik sürtünme katsayısı ’nün
hesaplanması
Eğik düzlem üzerindeki m kütleli cisim üzerine bir dış kuvvet etki etmiyor ise, cisim
kendi ağırlığı etkisi ile hareket edebilir. Cismin ağırlığının Fx ve Fy bileşenleri ele
alındığında, eğik düzlemin üzerindeki hareket Fx bileşeni tarafından gerçekleştirilirken,
harekete etkiyen sürtünme kuvvetinin büyüklüğünü de Fy belirler:
Fx = mg.sin (1)
Fy = mg.cos (2)
Fx ve Fy kuvvetlerinin büyüklüğü,'nın farklı değerleri için, dinamometre kullanılarak
ölçülebilir. Eğik düzlemin cismin bulunduğu yüzeyinin uzunluğu s olmak üzere;
sin=s
h (3)
cos=
2
1
s
h (4)
yazılabilir. Eşitlik (1) ve Eşitlik (3)’den ağırlığın eğik düzleme paralel olan yatay bileşeni
bulunabilir:
Fx=mg.s
h (5)
Eşitlik (2) ve Eşitlik (4) ’den ağırlığın eğik düzleme dik olan bileşeni Fy bulunabilir:
AMAÇ
GENEL BİLGİ

46
Fy= mg.
2
1
s
h (6)
Eşitlik (1) ve Eşitlik (2), cismin
sürtünme katsayısının eğim açısına
bağlı olduğunu belirlemek için
kullanılır. Düzlemin eğim açısı, cisim
tam kaymaya başladığı ana kadar
destekleyici hareket ettirilerek artırılır
ve bu durumda düzlem boyunca Fx
kuvveti ve statik sürtünme kuvveti Fs
dengededir.
Statik sürtünme katsayısı genellikle
düzlem boyunca Fy kuvveti ile
orantılıdır. Eğik düzlemin temas
yüzeyinin, m kütleli bloğa uyguladığı N tepki kuvvetinin büyüklüğü de Fy’ye eşit
olacağından,
Fs=.N (8)
yazılabilir. Fx=Fs kuvvetlerinin dengesi durumunda ise;
Fx=.N (9)
olarak elde edilir. Burada : sürtünme katsayısıdır.
1. Newton yasalarını yazınız ve açıklayınız.
2. Statik sürtünme ve kinetik sürtünme nedir? Açıklayınız.
3. Sürtünme kuvveti nelere bağlıdır?
4. Eğik düzlemde hareket eden bir cismin hareketini açıklayınız.
5. Sürtünme katsayısının birimi nedir?
1 Adet arabalı eğik düzlem
1 Adet ince ayarlı dinamometre
Tahta blok çifti
ARAÇ VE GEREÇLER
Şekil 1. Eğik düzlem üzerindeki bir cismin ağırlığı
ve bileşenlerine ayrılması.
ÇALIŞMA SORULARI
h

47
I.AŞAMA
m kütleli bir cismin eğik düzlemde ağırlığının yatay ve düşey bileşeninin bulunması
1. Öncelikle dinamometrenin sıfır ayarını kontrol ediniz. Bunun için;
a. Fx’i ölçen dinamometreyi eğik düzlem yüzeyine paralel tutarak sıfır ayarını
kontrol ediniz.
b. Fy’i ölçen dinamometreyi eğik düzleme dik bir şekilde tutup sıfır ayarını kontrol
ediniz.
2. Metal kancayı kullanarak Fy dinamometresine arabayı serbestçe asın ve arabanın
W ağırlığını belirleyiniz.
3. Eğik düzlemi kurun ve destekleyiciyi s=50 cm de tutun.
4. Arabayı düzlem üzerine yerleştirin ve Fx dinamometresine tutturun,
dinamometreyi blok (d) ile destekleyin.
5. Fy dinamometresini eğik düzlem üzerine mümkün olduğu kadar dik yerleştiriniz ve
arabayı düzlem üzerine ancak değene kadar kaldırınız.
6. Fx ve Fy kuvvetini okuyarak kaydediniz.
Yokuş destekleyiciyi (e), s= 40, 30, 20, 15 ve 10 cm’e taşıyıp her defasında eğik düzleme
dik dinamometreyi düzenli bir şekilde yerleştiriniz ve Fx ve Fy kuvvetlerini okuyarak
kaydediniz.
II.AŞAMA
Eğik düzlem kullanılarak statik sürtünme katsayısının belirlenmesi
DENEYİN YAPILIŞI
Şekil 2. m kütleli bir cismin eğik düzlemde ağırlığının yatay ve düşey bileşeninin bulunması
S

48
1. Eğik düzlemi kurup destekleyiciyi eğim açısı en küçük olacak şekilde en ucuna
kadar taşıyınız.
2. 3,5cm kalınlığındaki bez kaplı birinci bloğu, eğik düzlem üzerine bezle kaplı yüzeyi
eğik düzlemle temas edecek şekilde yerleştiriniz ve destekleyiciyi blok hareket
etmeye başladığı ana kadar eğim açısını büyütecek şekilde yavaşça hareket
ettiriniz.
3. Bloğun hareket ettiği noktada, eksen ile destekleyici arasındaki mesafeyi şerit
metre kullanarak ölçünüz ve statik sürtünme katsayısını hesaplayınız.
4. Birinci tahta bloğu eğik düzlem üzerine yerleştiriniz ve deneyi tekrarlayınız.
5. 2 cm kalınlığındaki ikinci bez kaplı bloğu eğik düzlem üzerine yerleştiriniz ve deneyi
tekrarlayınız.
6. Yüzey alanı A=20cm2 olan tahta yüzeyi ile deneyi tekrarlayınız.
Elde ettiğiniz sonuçları Çizelge 3’e kaydediniz.
I.AŞAMA
1. Yokuş destekleyicinin Çizelge 1 de verilen s konumları için Fx ve Fy kuvvetlerini
okuyarak çizelgeye kaydediniz.
VERİLER VE HESAPLAMALAR
Şekil 3. Eğik düzlemde statik sürtünme katsayısını belirlemek için deney düzeneği
S

49
Çizelge 1.Uzaklığa bağlı kuvvet bileşenleri (deneysel)
s(cm) Fx (ölçülen)(N) Fy (ölçülen)(N) 50
40
30
20
15
10
2. Eşitlik 5 ve Eşitlik 6 kullanarak F1 ve F2 kuvvetlerini hesaplayınız ve Çizelge 2’ye
kaydediniz.
Çizelge 2. Uzaklığa bağlı kuvvet bileşenleri (teorik)
s(cm) Fx (ölçülen)(N) Fy (ölçülen)(N) 50
40
30
20
15
10
II.AŞAMA
Çizelge 3. Farklı yüzeyler için alınan değerler
Blok Materyal A (cm2)
s (cm)
1 Bez
1 Tahta
2 Bez
2 Tahta

50
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
Öğrenci deneyi başarıyla tamamlamıştır.
imza
Görevli Öğretim Elemanı
1. Uygulamalı Temel Fizik, Prof. Dr. Kudret Özdaş, Prof. Dr. Ertuğrul
Yörükoğulları, Bilim Teknik Yayınevi, 1985, Eskişehir.
2. Fizik-Mekanik ve Isı, E. Hausmann, E.S. Slack, Berksoy Matbaası,
1960, İstanbul.
3. Üniversite Fiziği, H.D.Young, R.A.Freedman, Pearson, 2009,
İstanbul.
DENEYİN YORUMU
ÇALIŞMA KAYNAKLARI

51
DENEY 7 ESNEK VE ESNEK OLMAYAN
ÇARPIŞMA ÇARPIŞMA
1. Esnek ve esnek olmayan çarpışmaları incelemek
2. Esnek ve esnek olmayan çarpışmaların özelliklerini öğrenmek
Kütlesi m ve hızı v
olan bir cismin çizgisel momentumu
vmp
(1)
olarak tanımlanır. Hız vektörel bir nicelik olduğu için momentum da vektörel bir
niceliktir.
Bir sistem üzerine etki eden dış kuvvetlerin bileşkesi sıfır ise sistemin toplam
momentumu sabit kalır. Çarpışan iki cisminden oluşan bir sistem düşünülürse ve bu
sistem üzerine etki eden dış kuvvetlerin bileşkesi sıfır ise sistemin çarpışmadan önceki
toplam momentumu ile çarpışmadan sonraki toplam momentumu eşit olur. Yani
sistemin toplam momentumu korunur. Kütleleri m1 ve m2 olan iki cismin çarpışmadan
AMAÇ
GENEL BİLGİ

52
önceki hızları 1v
ve 2v
, çarpışmadan sonraki hızları '
1v
ve '
2v
ise momentumun
korunumu ilkesi gereği
'
22
'
112211 vmvmvmvm
(2)
'
2
'
121 pppp
(3)
yazılabilir.
Eğer iki cisim esnek olarak çarpışıyor ise momentumla birlikte sistemin kinetik enerjisi
de korunur. O zaman Eşitlik 2’ye ek olarak
2'
22
2'
11
2
22
2
112
1
2
1
2
1
2
1vmvmvmvm (4)
eşitliğini yazabiliriz. Esnek olmayan çarpışmada ise sadece sistemin toplam
momentumu korunur, kinetik enerji korunmaz.
Eğer çarpışmadan sonra, çarpışan cisimlerin her biri çarpışmadan önceki biçimlerini
korurlarsa, bu çarpışmaya elastik çarpışma, koruyamazlarsa elestik olmayan çarpışma
denir. Her iki çarpışma türünde de momentum korunur.
1. Çarpışmanın tam esnek olabilmesi için yay kuvvetinin yer değiştirme ile oranlı yani
rkF
olması gerekiyor mu? Gerekiyorsa kuvvetin sağlamak zorunda olduğu şart
nedir?
2. Çarpışmalarda momentumun korunduğunu kabul ederseniz hava yastığının viskozluk
sürtünmesinin sonuçların üzerindeki etkisi ne olabilirdi?
3. Esnek ve esnek olmayan çarpışma nedir? Açıklayınız.
4. İki boyutlu esnek bir çarpışma için bir ifade türetiniz ve yorumlayınız.
Hava masası sistemi
Yapışkan bantlar
ARAÇ VE GEREÇLER
ÇALIŞMA SORULARI
53
I.AŞAMA
a. Her iki diski de hava masası üzerine yerleştirin ve disklerin etrafına yapışkan
bantları takın. Bu bantlar tam esnek olmayan bir çarpışma elde etmenizi sağlayacaktır.
b. Kıvılcım zamanlayıcıyı 50 Hz olarak ayarlayın. Bu zemindeki kağıt üzerinde her 50Hz
de bir iz elde edeceğiniz anlamına gelir.
c. Diskleri birbirlerine doğru şekilde çizgilerle belirtilen biçimde çarpışacakları gibi
hafifçe itin, aynı zamanda pedala basın.
d. Elde ettiğiniz izlerden disklerin çarpışma öncesi ve çarpışma sonrası hızlarını
hesaplayarak ve Çizelge 1’e kaydedin.
II.AŞAMA
1. Deney düzeneğini bir önceki aşamada olduğu gibi kurun. Ancak bu aşamada diskler
etrafına lastik bantları geçirin. Bu bantlar çarpışmanın tam esnek olmasını
sağlayacaktır.
2. Kıvılcım zamanlayıcıyı 50 ms olarak ayarlayın.
3. Diskleri birbirine göre dik olarak itin ve aynı zamanda pedala basın.
4. Elde ettiğiniz izlerden disklerin çarpışma öncesi ve çarpışma sonrası hızlarını
hesaplayarak ve Çizelge 2’e kaydedin.
Çizelge 1. Eşit kütleli iki diskin esnek olmaya çarpışması.
Çarpışmadan önce
Çarpışmadan sonra
I.diskin hızı
II.diskin hızı
I. diskin momentumu
II. diskin momentumu
Toplam Momentum
I.diskin Kinetik Enerjisi
II.diskin Kinetik Enerjisi
Toplam Kinetik Enerji
DENEYİN YAPILIŞI
VERİLER VE HESAPLAMALAR
54
Çizelge 1. Eşit kütleli iki diskin esnek çarpışması.
Çarpışmadan önce
Çarpışmadan sonra
I.diskin hızı
II.diskin hızı
I. diskin momentumu
II. diskin momentumu
Toplam Momentum
I.diskin Kinetik Enerjisi
II.diskin Kinetik Enerjisi
Toplam Kinetik Enerji
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
Öğrenci deneyi başarıyla tamamlamıştır.
imza
Görevli Öğretim Elemanı
DENEYİN YORUMU

55
1. Uygulamalı Temel Fizik, Prof. Dr. Kudret Özdaş, Prof. Dr. Ertuğrul
Yörükoğulları, Bilim Teknik Yayınevi, 1985, Eskişehir.
2. Fizik-Mekanik ve Isı, E. Hausmann, E.S. Slack, Berksoy Matbaası,
1960, İstanbul.
3. Üniversite Fiziği, H.D.Young, R.A.Freedman, Pearson, 2009,
İstanbul.
ÇALIŞMA KAYNAKLARI

56

57
DENEY 8 MENZİLİN FIRLATMA AÇISINA
GÖRE DEĞİŞİMİ VE ENERJİNİN KORUNUMU
1. Menzilin fırlatma açısına göre değişimini ve mekanik enerjinin
korunumunu incelemek
Bir cismin hareketi, izlediği yola göre doğrusal, eğrisel ve dairesel gibi adlar alır. Bir
beyzbol topunun hareketini izleyen bir gözlemci eğik atış hareketi gözler Yatayla belirli
bir açı yapacak şekilde ilk hızla atılan bir cismin hareketine eğik atış hareketi denir. Şu
iki kabul yapılırsa eğik atış hareketinin analizini yapmak çok basitleşir:
1. g yerçekimi ivmesi hareket süresince sabit ve aşağıya doğru yönelmiştir,
2. hava direncinin harekete bir etkisi yoktur.
AMAÇ
GENEL BİLGİ
58
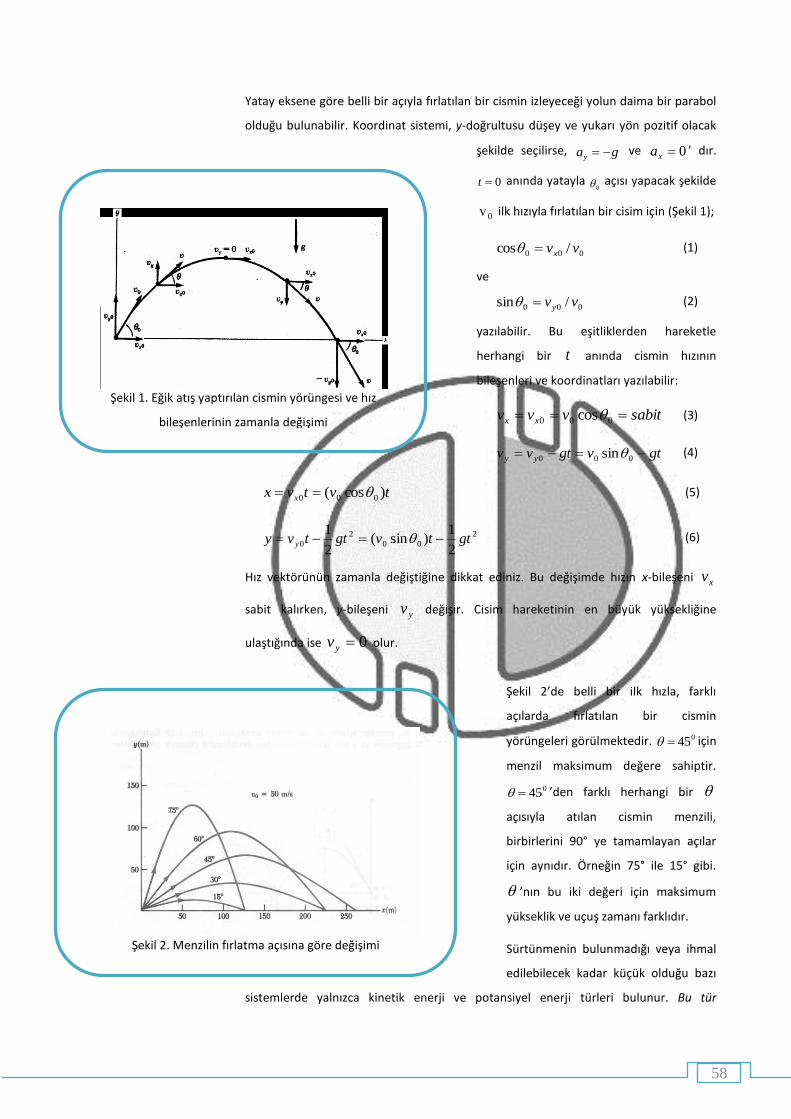
Yatay eksene göre belli bir açıyla fırlatılan bir cismin izleyeceği yolun daima bir parabol
olduğu bulunabilir. Koordinat sistemi, y-doğrultusu düşey ve yukarı yön pozitif olacak
şekilde seçilirse, gay ve 0xa ’ dır.
0t anında yatayla 0 açısı yapacak şekilde
0v ilk hızıyla fırlatılan bir cisim için (Şekil 1);
000 /cos vvx (1)
ve
000 /sin vvy (2)
yazılabilir. Bu eşitliklerden hareketle
herhangi bir t anında cismin hızının
bileşenleri ve koordinatları yazılabilir:
sabitvvv xx 000 cos (3)
gtvgtvv yy 000 sin (4)
tvtvx x )cos( 000 (5)
2
00
2
02
1)sin(
2
1gttvgttvy y (6)
Hız vektörünün zamanla değiştiğine dikkat ediniz. Bu değişimde hızın x-bileşeni xv
sabit kalırken, y-bileşeni yv değişir. Cisim hareketinin en büyük yüksekliğine
ulaştığında ise 0yv olur.
Şekil 2’de belli bir ilk hızla, farklı
açılarda fırlatılan bir cismin
yörüngeleri görülmektedir. 045 için
menzil maksimum değere sahiptir.
045 ’den farklı herhangi bir
açısıyla atılan cismin menzili,
birbirlerini 90° ye tamamlayan açılar
için aynıdır. Örneğin 75° ile 15° gibi.
’nın bu iki değeri için maksimum
yükseklik ve uçuş zamanı farklıdır.
Sürtünmenin bulunmadığı veya ihmal
edilebilecek kadar küçük olduğu bazı
sistemlerde yalnızca kinetik enerji ve potansiyel enerji türleri bulunur. Bu tür
Şekil 1. Eğik atış yaptırılan cismin yörüngesi ve hız
bileşenlerinin zamanla değişimi
Şekil 2. Menzilin fırlatma açısına göre değişimi

59
sistemlerdeki kinetik ve potansiyel enerjilerin toplamına kısaca mekanik enerji denir.
Sisteme dışardan bir kuvvet etkimediği sürece toplam enerji değişmez. Yani sistemin
herhangi iki durumdaki enerjileri toplamı eşittir. O halde ilk ve son durumlardaki
mekanik enerjiler, sırasıyla Eilk ve Eson olmak üzere, mekanik enerjinin korunumu en
genel ifadesiyle
sonilk EE (9)
Yazılabilir. Bu eşitlik ilk ve son konumlardaki hızlar sırasıyla vi,vs; ilk ve son
konumlardaki seçilen referans noktasına olan düşey uzaklıklar yi, ys olmak üzere,
ssii mgymvmgymv 22
2
1
2
1 (10)
olarak da yazılabilir.
1. 0v ilk hızıyla atılan m kütleli bir topun herhangi bir değeri için çıkabileceği
maksimum yüksekliği elde ediniz.
2. Topun uçuş süresini veren bağıntıyı elde ediniz.
3. Menzili fırlatma açısına bağlılığını gösteren eşitliği elde ediniz.
4. Eğik olarak atılan bir cismin ilk hızının sadece yatay bileşenini arttırırsak uçuş
süresi, menzili ve maksimum yüksekliği için ne söyleyebiliriz?
Fırlatıcı
Top
Şerit metre
Kum havuzu.
ARAÇ VE GEREÇLER
ÇALIŞMA SORULARI

60
1. Şekil 3’ deki deney düzeneğini kurunuz.
2. Fırlatıcıyı Çizelge 1`de belirtilen açı
değerine ayarlayınız ve içerisine top
yerleştirerek short range konumunda
üç kez atış yapınız.
3. Her atıştan sonra topun kum havuzu
üzerinde düştüğü yerin fırlatıcıya olan
uzaklığını ölçerek Çizelge 1’e
kaydediniz.
4. Kum havuzunu fırlatıcı ile aynı seviyeye
getirerek, aynı işlemleri Çizelge 2’de
belirtilen açı değerleri tekrarlayınız ve
bulduğunuz sonuçları Çizelge 2’e
kaydediniz.
5. y=y0+v0sint-(1/2)gt2 eşitliğini kullanarak
t’ yi bulunuz ve Çizelge 1’e yazınız.
6. xort=v0cos t eşitliği yardımıyla topun
v0 ilk hızını hesaplayınız ve Çizelge 1’e
yazınız.
7. Fırlatıcıyı 90o’ye ayarlayınız, topu
yerleştirerek short range konumunda
üç atış yapınız ve topun ulaştığı
yüksekliği Çizelge 3’e kaydediniz.
8. Ek=(1/2)mv2 ve Ep=mgh eşitliklerinden
yararlanarak kinetik enerji ve
potansiyel enerji değerlerini
hesaplayınız, Çizelge 4’ e kaydediniz.
DENEYİN YAPILIŞI
y x
Şekil 3 Yatay atış
Şekil 4. Eğik Atış

61
Çizelge 1. Yatay atış (=00)
Çizelge 2. Eğik atış (0o)
1. Çizelge 1’den xort ‘ yı bulunuz.
xort=..................m
2. 2
002
1sin gttvyy eşitliklerinden yararlanarak t uçuş süresini
hesaplayınız.
t=…………….s
3. tvxort cos0 eşitliğinden yararlanılarak topun 0v ilk hızını bulunuz.
0v =..................m/s
4. Çizelge 2 yardımıyla açı menzil grafiğini çiziniz.
Çizelge 3. Eğik atış (=90o)
Atış No x (m)
1
2
3
Atış No 15o 30o 45o 60o 75o
1
2
3
Ortalama Menzil
Atış No Yükseklik(h)
1
2
3
Ortalama Yükseklik
VERİLER VE HESAPLAMALAR

62
Çizelge 4. Kinetik Enerji ve Potansiyel Enerji büyüklükleri
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
Öğrenci deneyi başarıyla tamamlamıştır.
imza
Görevli Öğretim Elemanı
Topun ortalama yüksekliği
Topun kütlesi
Topun ilk kinetik enerjisi
Topun potansiyel enerjisinin en büyük değeri
DENEYİN YORUMU

63
1. Uygulamalı Temel Fizik, Prof. Dr. Kudret Özdaş, Prof. Dr. Ertuğrul
Yörükoğulları, Bilim Teknik Yayınevi, 1985, Eskişehir.
2. Fizik-Mekanik ve Isı, E. Hausmann, E.S. Slack, Berksoy Matbaası,
1960, İstanbul.
3. Üniversite Fiziği, H.D.Young, R.A.Freedman, Pearson, 2009,
İstanbul.
ÇALIŞMA KAYNAKLARI

64

65
DENEY 9 AÇISAL HIZIN ÖLÇÜLMESİ
1. Bu deneyin amacı, farklı kütleleri kullanarak açısal hızın ölçülmesidir.
Şekil 1’de O noktasından geçen ve şekil düzlemine dik olan sabit bir eksen etrafında xy-
düzlemi üzerinde dönen düzlemsel bir katı cisim
görülmektedir. Bir katı cisim şekli bozulmayan veya
bütün parçacık çiftleri arasındaki uzaklıkların sabit
olduğu bir cisim olarak tanımlanır. Orijinden r kadar
uzaktaki cisme ait bir parçacık, orijin etrafında r
yarıçaplı bir çember üzerinde dönmektedir.
Gerçekte, cisim üzerindeki her parçacık, O noktası
etrafında dairesel hareket yapar. P noktasının
konumunu kutupsal koordinatlar (r,) ile göstermek
daha uygundur. Bu gösterimde, zamanla değişecek
tek koordinat açısıdır ve r sabit kalmaktadır (Dik
koordinat sisteminde x ve y nin her ikisi de zamanla
değişir). Bir parçacık, pozitif x-ekseninden (=0) bir
AMAÇ
GENEL BİLGİ
O
P
x
y
r
Şekil 1. xy düzlemi üzerinde dönen düzlemsel bir katı cisim

66
yay boyunca P noktasına s yay parçası kadar yer değiştirirse, bu yer değiştirme ile ona
karşılık gelen açı arasındaki bağıntı;
rs (1)
r
s (2)
dir. açısı, bir yay uzunluğunun yay yarıçapına oranı olup
boyutsuz bir sayıdır. Fakat yaygın olarak ’nın birimi
radyan olarak alınır. Burada; bir radyan, yarıçapla eşit
uzunluktaki bir yay parçasının yarıçapa oranı olarak
tanımlanır. Bir dairenin çevresi 2r olduğundan, 360o,
2r/r radyan veya 2rad’ lık açıya karşılık gelir. Böylece
1rad=360o/2=57,3o bulunur. Derece cinsinden verilmiş
açıyı radyan’a çevirmek için 2 radyan=360o eşitliğini
kullanırız. Böylece,
)(180
)( derecerado
(3)
Bir parçacık, t zaman aralığında P den Q ya giderken
=2-1 açısını tarar; bu, açısal yerdeğiştirme olarak
adlandırılır (Şekil.2). Ortalama açısal hızın , radyan
boyutsuz olduğundan birimi rad/s veya s-1 dir ve Açısal yerdeğiştirmenin t zaman
aralığına oranı olarak tanımlanır:
ttt
12
12 (4)
1. Periyot ve frekansı tanımlayınız ve birimlerini yazınız.
2. Açısal hız ile çizgisel hız arasındaki fark nedir?
3. Dairesel bir yolda giden arabanın merkezcil ivmeye sahip olmayıp teğetsel ivmeye
sahip olması mümkün müdür?
4. Açısal yerdeğiştirme, radyan yerine derece cinsinden ölçüldüğü zaman , ve
için kinematik ifadeler geçerli midir?
5. Disk dönerken disk üzerinde bulunan bütün noktaların açısal hızı aynı mıdır? Bütün
noktalar aynı çizgisel hızda mıdır?
x
y
1
2
Q, t2(s)
P, t1(s)
r
Şekil.2. Dönen katı cisim üzerindeki bir
noktanın yörüngesi
ÇALIŞMA SORULARI

67
Döner sistem
Dijital sayıcı
Fotoget
Bağlantı kabloları
1. Fotogetleri aralarında 60o olacak şekilde yerleştiriniz.
2. İpin ucuna iki adet kütle bağlayınız.
3. Kütleleri serbest bırakınız.
4. Ölçme cihazından okuduğunuz değeri Çizelge 1’e kaydediniz.
5. Aynı ölçümleri 120o ve 180o için ipin ucuna, 2m ve 4m kütlelerini takarak tekrarlayınız.
1. Ölçme cihazından okuduğunuz değeri Çizelge 1’e kaydediniz.
2. Aynı ölçümleri 120o ve 180o için ipin ucuna, 2m ve 4m kütlelerini takarak tekrarlayınız.
Çizelge 1.Ölçme değerinden okunan dönme zamanları
3.Açısal hızı t
eşitliğinden yararlanarak hesaplayınız.
1=………..rad/s 2=………..rad/s 3=………..rad/s
4=………..rad/s 5=………..rad/s 6=………..rad/s
60o 120o 180o
2m 4m 2m 4m 2m 4m
1.ölçüm ……..s ……..s ……..s ……..s ……..s ……..s
2.ölçüm
3.ölçüm
Ortalama değer
ARAÇ VE GEREÇLER
DENEYİN YAPILIŞI
VERİLER VE HESAPLAMALAR
68
4. Çizgisel hızı rwv . eşitliğinden yararlanarak hesaplayınız. (r=yarıçap)
v1=………..m/s v2=………..m/s v3=………..m/s
v4=………..m/s v5=………..m/s v6=………..m/s
5.Her bir açı ve kütle değerleri için periyot ve frekansı
f
rT
12
eşitliğinden hesaplayınız.
T1=……………s f1=…………..s-1
T2=……………s f2=…………..s-1
T3=……………s f3=…………..s-1
T4=……………s f4=…………..s-1
T5=……………s f5=…………..s-1
T6=……………s f6=…………..s-1
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
Öğrenci deneyi başarıyla tamamlamıştır.
İmza
Görevli Öğretim Elemanı
DENEYİN YORUMU

69
1. Uygulamalı Temel Fizik, Prof. Dr. Kudret Özdaş, Prof. Dr. Ertuğrul
Yörükoğulları, Bilim Teknik Yayınevi, 1985, Eskişehir.
2. Fizik-Mekanik ve Isı, E. Hausmann, E.S. Slack, Berksoy Matbaası,
1960, İstanbul.
3. Üniversite Fiziği, H.D.Young, R.A.Freedman, Pearson, 2009,
İstanbul.
ÇALIŞMA KAYNAKLARI

70
DENEY 10 YAYLI SARKAÇ
Statik ve dinamik yöntemle yay sabitinin belirlenmesi ve karşılaştırılması.
Bu deneyde, esneklik sınırını aşmayan bir kuvvetle gerilen bir yayın, kuvvet sabitinin
tayinini iki farklı yöntemle gerçekleştireceğiz. k yay sabitini önce statik yöntemle, daha
sonra da dinamik yöntemle tayin edeceğiz.
Bir ucu sabit olan yaya, diğer ucundan yayı geren bir F kuvveti uygulandığında, yayda
oluşan geri çağırıcı kuvvet, uygulanan F kuvvetine eşit oluncaya kadar yay uzar. F
kuvveti kaldırıldığında ise, yay ilk uzamasız
haline dönüyorsa, bu uzamaya esnek uzama
denir. Esneklik sınırı aşılmadığı sürece, yaydaki
uzamalar (ya da kısalmalar) yaya etki eden F
kuvvet ile orantılıdır. Uygulanan F kuvveti ile,
yayın uzama miktarı olan y arasında
kyF (1)
bağıntısı vardır. Buna “Hooke Yasası” adı
verilir. Eşitlikteki k, yay sabitidir. Uzamasız
halde uzunluğu yo olan bir yaya m kütleli bir
cisim asılırsa, cismin ağırlığı nedeniyle yay
gmW
(2)
kuvveti ile gerilir ve yay dengede olduğunda
ise,
mg=ky (3)
eşitliği elde edilir. Burada g yerçekimi
ivmesidir.
Belirli bir yörünge üzerinde, ileri geri hareket etmekte olan cismin hareketine salınım
ya da titreşim hareketi denir. Bu şekildeki harekette cisim yörüngesi üzerinde bulunan
bir noktadan eşit zaman aralıklarında geçmekte ise cismin yaptığı hareket aynı
zamanda periyodik bir harekettir. Periyodik hareketi bu şekilde tanımladıktan sonra,
basit harmonik hareket için de bir tanımlama yapabiliriz. Bir AB doğru parçası üzerinde
periyodik hareket yapmakta olan bir cisme etkiyen kuvvet, her zaman yörüngenin orta
noktasına yönelik ve bu noktanın parçacığa olan x uzaklığı ile orantılı ise, bu parçacığın
hareketine basit harmonik hareket adı verilir. Herhangi bir anındaki x uzunluğuna
AMAÇ
GENEL BİLGİ
Şekil 1. Yaylı Sarkaç sistemi

71
uzanım adı verilir. Uzanımın alabileceği en büyük değere ise genlik denir. Bir tam
titreşim için geçen zaman periyot adı verilir ve T ile gösterilir. Periyodun birimi
saniyedir. Birim zamandaki titreşim sayısına da frekans adı verilir. Frekans da f ile
gösterilir. Frekansın birimi ise s-1 dir. Periyot T=ω
2π ile verildiğinden ve frekans,
periyodun tersi olduğundan, bu sistem için hareketin periyot ve frekansını,
ωT
π2 =
k
mπ2 (4)
m
k
πTf
2
11 (5)
olarak ifade edebiliriz. Periyot ve frekans yalnızca kütleye ve yayın kuvvet sabitine
bağlıdır.
1.Basit harmonik hareketi tanımlayınız.
2. Periyot, frekans ve yay sabiti nedir? Birimleri nelerdir?
3. Geri çağrıcı kuvveti tanımlayınız.
4. Yaylı sarkaç titreşim hareketine başladıktan bir süre sonra niçin durur? Açıklayınız.
5.Basit harmonik harekette genliğin maksimum ve minimum değerleri için enerji
bağıntılarını yazınız ve yorumlayınız.
3 adet spiral yay
Kronometre
Metre
Farklı kütleli cisimler.
I AŞAMA
Statik yöntemle yay sabitinin bulunması
1. Spiral yayı boşken asınız ve cetvel yardımı ile yo uzanımını okuyunuz.
2. Bu işlemi iki spiral yayın her biri için tekrarlayınız ve Çizelge 1’e kaydediniz.
3. Bu işlemleri spiral yayın ucuna kütleler asarak tekrarlayınız. Cetvelden okuduğunuz
değerleri Çizelge 1’ e kaydediniz.
4. Her bir yay için k sabitlerini hesaplayınız ve Çizelge 2’ ye kaydediniz.
ARAÇ VE GEREÇLER
DENEYİN YAPILIŞI
ÇALIŞMA SORULARI
72
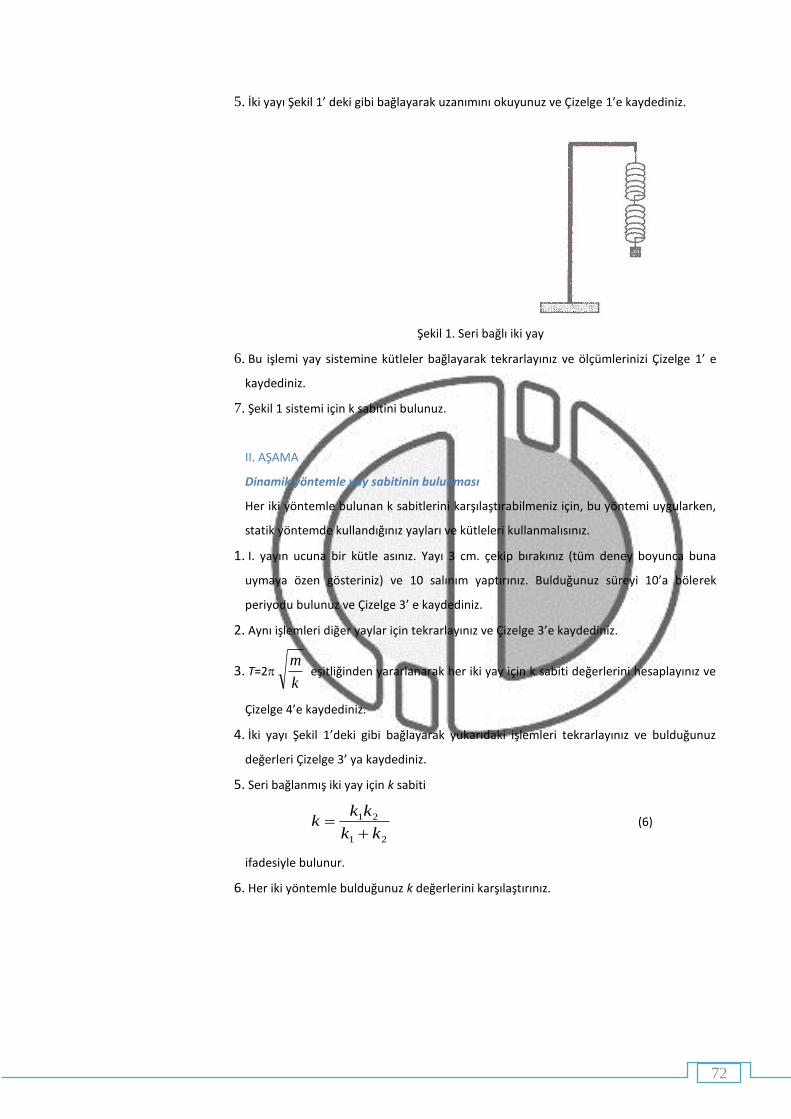
5. İki yayı Şekil 1’ deki gibi bağlayarak uzanımını okuyunuz ve Çizelge 1’e kaydediniz.
Şekil 1. Seri bağlı iki yay
6. Bu işlemi yay sistemine kütleler bağlayarak tekrarlayınız ve ölçümlerinizi Çizelge 1’ e
kaydediniz.
7. Şekil 1 sistemi için k sabitini bulunuz.
II. AŞAMA
Dinamik yöntemle yay sabitinin bulunması
Her iki yöntemle bulunan k sabitlerini karşılaştırabilmeniz için, bu yöntemi uygularken,
statik yöntemde kullandığınız yayları ve kütleleri kullanmalısınız.
1. I. yayın ucuna bir kütle asınız. Yayı 3 cm. çekip bırakınız (tüm deney boyunca buna
uymaya özen gösteriniz) ve 10 salınım yaptırınız. Bulduğunuz süreyi 10’a bölerek
periyodu bulunuz ve Çizelge 3’ e kaydediniz.
2. Aynı işlemleri diğer yaylar için tekrarlayınız ve Çizelge 3’e kaydediniz.
3. T=2k
m eşitliğinden yararlanarak her iki yay için k sabiti değerlerini hesaplayınız ve
Çizelge 4’e kaydediniz.
4. İki yayı Şekil 1’deki gibi bağlayarak yukarıdaki işlemleri tekrarlayınız ve bulduğunuz
değerleri Çizelge 3’ ya kaydediniz.
5. Seri bağlanmış iki yay için k sabiti
21
21
kk
kkk
(6)
ifadesiyle bulunur.
6. Her iki yöntemle bulduğunuz k değerlerini karşılaştırınız.

73
Çizelge 1 Yayların uzanımları
mdisk=21,50g maskı=33,31g
m1=1mdisk+maskı m2=2mdisk+maskı m3=3mdisk+maskı
Çizelge 2 Statik yöntemle elde edilen yay sabitleri
Çizelge 3 Periyot değerleri
Kütlesiz
uzanım(m)
Kütleli uzanım(m)
m1=……kg m2=……kg m3=……kg
I. yay
II. yay
I.yay+II.yay
Yay Sabiti (k)
m1 m2 m3 ORTALAMA
I. yay
II. yay
I.yay+II.yay
Periyotlar
m1 m2 m3 ORTALAMA
Periyot (I. Yay)
Periyot (II. Yay)
I.yay+II.yay
VERİLER VE HESAPLAMALAR

74
Çizelge 4 Dinamik yöntemle elde edilen yay sabitleri
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
Öğrenci deneyi başarıyla tamamlamıştır.
imza
Görevli Öğretim Elemanı
Yay sabiti
k
I. yay
II. yay
I.yay+II.yay
DENEYİN YORUMU

75
1. Uygulamalı Temel Fizik, Prof. Dr. Kudret Özdaş, Prof. Dr. Ertuğrul
Yörükoğulları, Bilim Teknik Yayınevi, 1985, Eskişehir.
2. Fizik-Mekanik ve Isı, E. Hausmann, E.S. Slack, Berksoy Matbaası,
1960, İstanbul.
3. Üniversite Fiziği, H.D.Young, R.A.Freedman, Pearson, 2009,
İstanbul.
ÇALIŞMA KAYNAKLARI