2 friezes and mosaics
TRANSCRIPT

2
Friezes and Mosaics
This chapter discusses the classification of friezes and several concepts related to mo-saics. The first section introduces the concept of operations that leave a frieze un-changed, using basic geometry and intuition. It also describes what will be the mainsteps of the classification theorem. Section 2.2 defines affine transformations and theirmatrix representation, and isometries. The highlight of this chapter is the classificationtheorem shown in Section 2.3. In less detail, the last section discusses mosaics. Thereis no advanced section to this chapter, the proof of the classification theorem being themost difficult element. Sections 2.1 and 2.4 can be covered in three hours of class.The tools are then purely geometric and the possibility of classification is made clear.If the classification theorem is the goal, four hours should be devoted to the first threesections. In all cases, the lecturer should bring copies of Figure 2.2 on transparenciesto the classroom. Their use on a projector helps students to understand quickly theconcept of symmetry. Only a basic knowledge of linear algebra and Euclidean geometryis required to understand this chapter. The proof of the classification theorem requiresa familiarity with abstract reasoning.
This subject offers several interesting directions for further study: aperiodic tilings (end
of Section 2.4) is one such direction, while Exercises 13, 14, 15, and 16 present several
others.
Friezes and mosaics have been used in decoration for several millennia. The ancientworld’s Sumerian, Egyptian, and Mayan civilizations all used them to great effect. Itwould be a lie, however, to pretend that ancient mathematics developed the “tech-nology” behind the art. The formal mathematical study of tilings is relatively recent,having started no more than two centuries ago. The memoir of Bravais [1], a Frenchphysicist, is among the first scientific studies of the subject.
Mathematics is able to provide a way to systematically classify the friezes and mo-saics commonly seen in architecture and art. These classifications have allowed mathe-maticians to better understand the rules behind them and to create truly new patternsby breaking some of these rules.
C. Rousseau and Y. Saint-Aubin, Mathematics and Technology,DOI: 10.1007/978-0-387-69216-6 2, c© Springer Science+Business Media, LLC 2008
46 2 Friezes and Mosaics
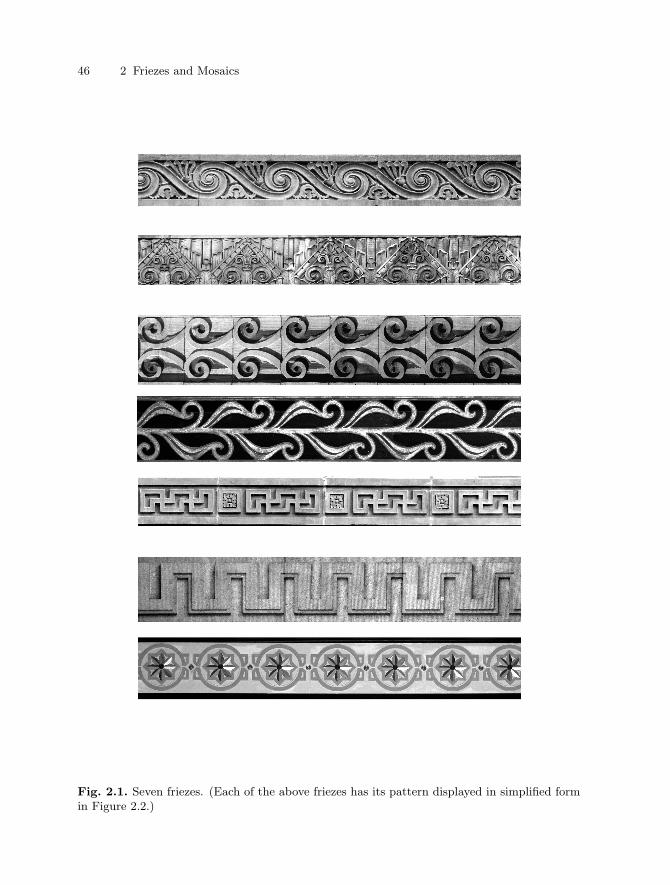
Fig. 2.1. Seven friezes. (Each of the above friezes has its pattern displayed in simplified formin Figure 2.2.)
2 Friezes and Mosaics 47
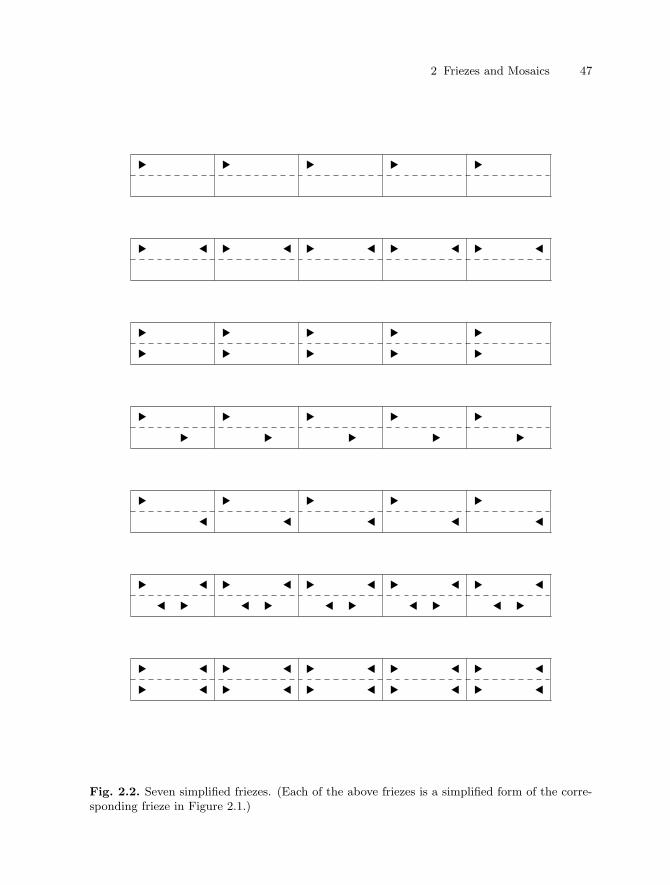
Fig. 2.2. Seven simplified friezes. (Each of the above friezes is a simplified form of the corre-sponding frieze in Figure 2.1.)
48 2 Friezes and Mosaics
Classification of objects is a fairly common mathematical activity. The reader whohas followed a course on multivariable calculus will remember the classification of ex-trema of a function of two variables using the second partial derivative test. If thematrix of second derivatives (the Hessian matrix) is nonsingular, the extremum can beclassified as either a local minimum or a local maximum or a saddle point. The readermight also have encountered the classification of conics, either in an advanced linearalgebra class or in Euclidean geometry. And for those having read Chapter 6 on error-correcting codes, Theorems 6.17 and 6.18 classify finite fields. These are examples ofclassifications of abstract objects. It may be surprizing to learn that mathematics canclassify objects as concrete as architectural patterns. Here is how it is done.
2.1 Friezes and Symmetries
The Oxford English Dictionary defines frieze as a band of painted or sculptured deco-ration. It is also defined as that member in the entablature of an order which comesbetween the architrave and cornice, referring to the architectural location where suchpatterns are commonly used. Figure 2.1 shows seven friezes taken from architecture. Todiscuss these objects from a mathematical point of view, we will modify the definition toinclude the following elements: (i) a frieze has a constant and finite width (the heightof the friezes in Figure 2.1) and is infinitely long in the perpendicular direction (thehorizontal one in our examples); and, (ii) it is periodic, meaning that there exists someminimal distance L > 0 such that a translation of the frieze by a distance L along thedirection in which it is infinite will leave the frieze unchanged. The length L is calledthe period of the frieze. This definition does not fit perfectly with real-world friezes(specifically those in Figure 2.1) because they are not infinitely long. However, we caneasily imagine extending them infinitely in both directions by simply continuing thepattern.
Figure 2.2 presents seven more friezes. They are much less detailed but much simplerto study. Each of these seven friezes has the same period L, equal to the distancebetween two neighboring vertical bars. In the remaining discussion we will imaginethat these vertical bars do not appear in the frieze pattern, since they have been drawnsimply to make the period explicit. Some of these friezes are invariant under variousgeometric transformations other than translations. For example, the third and seventhfriezes remain the same even if we flip them so as to exchange their top and bottom.In this case we say that they are invariant under reflection by a horizontal mirror. Thesecond, sixth, and seventh friezes remain unchanged if flipped from left to right; wesay that they are invariant under reflection by a vertical mirror. These distinctionsbetween various friezes raise a natural question: is it possible to classify all friezesby considering the set of operations under which they are invariant? For example,the set of operations leaving the first frieze unchanged includes neither the horizontalnor the vertical reflection just discussed. This set of operations is distinct from thatcharacterizing the third frieze, which may be reflected horizontally. Note that the

2.1 Friezes and Symmetries 49
friezes in Figures 2.1 and 2.2 have been ordered such that they each display the samerespective symmetries. Thus, corresponding pairs will be left unchanged by the sameoperations. For example, the third frieze in both figures is invariant under translationsand horizontal reflection.
When a geometric transformation preserving lengths (such as a translation or areflection) leaves a frieze unchanged, it is said to be a symmetry operation of the friezeor, simply, a symmetry. The complete list of symmetries of a frieze is infinite. Indeed,we would like to distinguish in this list the translation by a distance of one period Lfrom the translations by 2L, 3L, etc., and these already account for an infinite numberof symmetry operations. Moreover, the list should also contain the inverse of eachsymmetry operation. The inverse of a symmetry operation is the usual inverse of afunction: the composition of a function and its inverse is the identity in the plane (oron the subset defined by the frieze as in the present case). The inverse of a translationto the right by a distance L is a translation to the left by the same distance. (Exercise:what is the inverse of a reflection with respect to a given mirror? and that of a rotationby an angle θ?) If translations to the right (respectively to the left) are associatedto positive distances (respectively negative distances), then the list of symmetries of afrieze of period L should contain all translations by a distance nL with n ∈ Z. Insteadof listing all symmetries of a frieze, it is common to give only a subset of elements whosecompositions and inverses give the whole list. Such a subset is called a set of generators.This is what we are going to use from now on. (Mathematicians usually take this subsetas small as possible. They call it minimal whenever the subset, after removal of one ofits elements, fails to generate the whole set of symmetries.)
The goal for the remainder of this section is to build geometric intuition of key ideasleading to the classification theorem, Theorem 2.12. This theorem gives all possiblelists of symmetry generators for friezes of a given period. The reader is urged to makea copy of Figure 2.2 on a transparency and cut it into seven strips, one for each frieze,before reading on. Experimentation is an ideal way to develop intuition!The three generators tL, rh, and rv. We have already introduced some possiblesymmetry operations: translations (by any integer multiple of the period), reflectionsby horizontal and vertical mirrors. We will use the symbol rh and rv for the latter. Theset of translations of a frieze is generated by the unique translation tL by a period L.(The inverse of tL is t−L. Composition of n operations tL gives tL ◦ tL ◦ · · · ◦ tL = tnL.)
A subtlety should be cleared up right away. For the reflection rh to leave a friezeunchanged, the horizontal mirror should be located along the middle line of the frieze(the dashed lines in Figure 2.2). Its position is therefore completely determined by therequirement of being a symmetry. This is not the case for reflections through a verticalmirror. Positions of vertical mirrors must be chosen according to the pattern. The frieze2 (the second from the top in Figure 2.2) has an infinite set of vertical mirrors. All smallvertical bars define a position for a vertical mirror. But these are not the only ones.A mirror located halfway between two adjacent vertical bars also defines a symmetryof this frieze. Exercise 7 shows that if a frieze of period L is unchanged under a givenvertical mirror, it is also invariant under an infinite number of mirrors, any of those

50 2 Friezes and Mosaics
being at a distance nL2 , for n ∈ Z, from the first. The notation rv underlies therefore a
choice for the position of one mirror and all other vertical mirrors at a distance equal toan integer multiple of L
2 from the first one. (Exercise: which other friezes of the figurehave a symmetry rv?)Notation. Composition of symmetry operations will be used often in the following,and we shall drop the symbol “◦”. For example, rh ◦ rv will be simply noted rhrv. Soonwill also appear the necessity of distinguishing the order of operations. It is importantto note that operations are listed from right to left. The composition rhrv stands forthe operation rv followed by rh.The rotation rhrv. The frieze 5 introduces a new generator. This frieze has neitherrh nor rv as a symmetry, but if rv and then rh are both performed on it, the friezeremains unchanged. (The vertical mirror is along one of the vertical bars.) (Exercise:check this claim!) It can then happen that neither rh nor rv is a symmetry but theircomposition rhrv is. The final result rhrv of these two reflections is a rotation by anangle 180◦. To see this, note that rhrv exchanges the top and bottom, the left and theright, without altering the distances. This is exactly the action of rotation by 180◦. (Interms of a coordinate system whose origin is on a vertical bar, a point (x, y) within thefrieze is mapped into (−x,−y) under this transformation. This is why this operation isalso called the symmetry through the origin.) Exercise 8 proposes a geometrical proofof this property.
The following properties of the three generators rh, rv, and rhrv are easily verified,geometrically or with the use of the copy on transparency that you have made of thefigure. They could also be proved using the matrix representation that will be introducedin Section 2.2. (See Exercise 6.)
Proposition 2.1 1. The operations rh and rv commute, that is, the two compositionsrhrv and rvrh are equal.2. The inverse of rh is rh, that of rv is rv, and that of rhrv is rhrv.3. The composition of rh and rhrv gives rv. That of rv and rhrv gives rh. (This allowsus to conclude that a frieze that would have any two of the three operations rh, rv, rhrv
as symmetries would automatically have the third also.)
With these properties, it should be easy to determine which of rh, rv, and rhrv aresymmetries of a given frieze of Figure 2.2. (Exercise: do it for all of them!)The glide reflection symmetry sg = tL/2rh. After the last proposition, the list ofpossible generators reads tL, rh, rv, and rhrv. Any of rh, rv, and rhrv is a symmetry ofat least one frieze in Figure 2.2 and not a symmetry of at least one other frieze. Butthe frieze 4 shows that this list is not yet complete. None of rh, rv, rhrv is a symmetryof this frieze. But a reflection rh followed by a translation by a half-period L
2 leavesit unchanged. (See Figure 2.3. Recall that vertical bars are not part of the pattern.)We shall refer to this operation as the glide reflection and denote it by sg. Using thecomposition we can write it as sg = tL/2rh. (Exercise: only one other frieze among theseven of Figure 2.2 has sg among its symmetries. Which one?)

2.1 Friezes and Symmetries 51
Fig. 2.3. A glide reflection. The frieze 4 as it appears in Figure 2.2 (top line), the same afterthe operation rh (middle line), and after a translation by a half-period (bottom line).
Toward the classification theorem. The list of possible generators now containsfive operations (tL, rh, rv, rhrv, sg). It was obtained by studying Figure 2.2. To obtainthe complete list of symmetry sets of friezes, we need all possible symmetry operationsof friezes. What tells us that the list of five operations above is complete? Could therebe another frieze that has a symmetry that cannot be obtained from these five? Thesewill be the first questions to answer in order to prove the classification theorem.
Suppose for the time being that this list is complete. We can then enumerate po-tential sets of symmetries for friezes of period L. As stated above, we shall do this byidentifying a set of generators. By definition, all sets will include the translation tL bya distance L and no shorter ones. Any set may contain either zero or one or two ofthe three generators rh, rv, rhrv. (If the list contains two, it automatically contains thethird one.) These observations lead to the following list.
1. 〈tL〉2. 〈tL, rv〉3. 〈tL, rh〉4. 〈tL, sg〉5. 〈tL, rhrv〉6. 〈tL, sg, rhrv〉7. 〈tL, rh, rv〉8. 〈tL, sg, rh〉9. 〈tL, sg, rv〉10. 〈tL, sg, rh, rv〉
All of the sets contain tL. Sets 1 and 4 contain none of rh, rv, rhrv. Set 4 contains sg,set 1 does not. Sets 2, 3, 5, 6, 8 and 9 contain one and only one of rh, rv, rhrv; 6, 8, 9

52 2 Friezes and Mosaics
add the glide reflection sg, but 2, 3, 5 do not. Sets 7 and 10 contain two of rh, rv, rhrv
(and therefore all three). Set 10 has moreover sg.The classification theorem will have to resolve two more questions. The first is
whether this list contains repetitions. Since we are listing only generators, two in thelist above could generate the same list of symmetries. The second question is whethersome of the sets do not generate symmetries of friezes of period L. This question mightbe somewhat surprising. But one can easily see that set 8 needs to be crossed out ofthe list, since it does not generate symmetries of a frieze of period L.
To see this, it is crucial to remember that the glide reflection sg is the composition ofrh and tL/2. But it can be seen that the set of generators of a frieze of period L cannotcontain both sg and rh. Why? We have noted that the inverse of rh is rh itself. Then thecomposition of rh and sg is sgrh = tL/2rhrh = tL/2(Id) = tL/2. Because compositionsof symmetries are symmetries, the translation tL/2 should also be a symmetry of thefrieze. But the period of the frieze was assumed to be L, and by definition, this periodshould be the smallest translation leaving the frieze invariant. The translation tL/2
cannot appear, and hence sg and rh cannot simultaneously be generators of the samefrieze. Set 8 must be rejected. (Note that this set does generate a set of symmetries fora frieze. But that frieze is of period L
2 and it is then set 3, that is, 〈tL/2, rh〉.) (Exercise:the classification theorem will end up keeping only seven of the ten lists above. Theargument for rejecting 8 was given. Can you guess which other two must be discarded?)
We shall complete the proof of the Classification theorem after having discussed apowerful algebraic tool to study these geometric operations: the matrix representationof affine transformations.1
2.2 Symmetry Group and Affine Transformations
We will use affine transformations as the mathematical foundation for describing in-variant operations on friezes. (If you have read Chapter 3 or 11, you will have alreadyencountered them.)
Definition 2.2 An affine transformation in the plane is a transformation R2 → R
2 ofthe form (x, y) �→ (x′, y′), where
x′ = ax + by + p,
y′ = cx + dy + q.
An affine transformation is called proper if it is bijective.
Such a transformation can be described in matrix form as
1It is possible to give a purely geometric proof of this theorem. See, for example, [2] and[5].

2.2 Symmetry Group and Affine Transformations 53
(x′
y′
)
=(
a bc d
)(xy
)
+(
pq
)
. (2.1)
The matrix(
a bc d
)
is a linear transformation, while p and q represent a translation inthe plane. For the rest of this chapter we will be considering only proper (or regular)affine transformations, that is, affine transformations that are one-to-one. As we shallsee soon, this additional condition is equivalent to the invertibility of the linear trans-formation matrix
(a bc d
)
. Observe that the following equation describes the same affinetransformation: ⎛
⎝
x′
y′
1
⎞
⎠ =
⎛
⎝
a b pc d q0 0 1
⎞
⎠
⎛
⎝
xy1
⎞
⎠ . (2.2)
In this modified form, a one-to-one correspondence is made between elements (x, y) ofthe plane R
2 and elements (x, y, 1)t in the plane at z = 1 of R3. The mapping between
affine transformations of the form (2.1) and the 3×3 matrices whose last line is (0 0 1),⎛
⎝
a b pc d q0 0 1
⎞
⎠ ,
is also one-to-one.If we compose two affine transformations (x, y) → (x′, y′) and (x′, y′) → (x′′, y′′)
given by
x′ = a1x + b1y + p1,
y′ = c1x + d1y + q1,
and
x′′ = a2x′ + b2y
′ + p2,
y′′ = c2x′ + d2y
′ + q2,
the resulting (x′′, y′′) can be obtained as
x′′ = a2x′ + b2y
′ + p2
= a2(a1x + b1y + p1) + b2(c1x + d1y + q1) + p2
= (a2a1 + b2c1)x + (a2b1 + b2d1)y + (a2p1 + b2q1 + p2)
and
y′′ = c2x′ + d2y
′ + q2
= c2(a1x + b1y + p1) + d2(c1x + d1y + q1) + q2
= (c2a1 + d2c1)x + (c2b1 + d2d1)y + (c2p1 + d2q1 + q2).

54 2 Friezes and Mosaics
Note that this compound transformation can itself be described in a 3× 3 matrix form:⎛
⎝
x′′
y′′
1
⎞
⎠ =
⎛
⎝
a2a1 + b2c1 a2b1 + b2d1 a2p1 + b2q1 + p2
c2a1 + d2c1 c2b1 + d2d1 c2p1 + d2q1 + q2
0 0 1
⎞
⎠
⎛
⎝
xy1
⎞
⎠ .
This last example demonstrates the utility of the 3×3 matrix notation, since composedtransformations can themselves be expressed as the product of the matrices underlyingthe individual transformations:⎛
⎝
a2 b2 p2
c2 d2 q2
0 0 1
⎞
⎠
⎛
⎝
a1 b1 p1
c1 d1 q1
0 0 1
⎞
⎠ =
⎛
⎝
a2a1 + b2c1 a2b1 + b2d1 a2p1 + b2q1 + p2
c2a1 + d2c1 c2b1 + d2d1 c2p1 + d2q1 + q2
0 0 1
⎞
⎠ .
This property allows us to study affine transformations and their compositions usingthis 3 × 3 representation and simple matrix multiplication. The geometric problem isthus reduced to a linear algebra problem. Because of this correspondence, we shall oftenuse the matrix representation to describe an affine transformation. It should be stressedthat an affine transformation can be defined without using a coordinate system, but itsmatrix representation exists only if one has been chosen.
To show the power of this notation we will now compute the inverse of a proper affinetransformation. The inverse is the transform that associates (x′, y′) → (x, y), wherex′ = ax+ by +p and y′ = cx+dy + q. Since the composition of affine transformations isrepresented by matrix multiplication, it must be that the matrix describing the inverseis the inverse of the matrix describing the original transform. This is easily calculatedas ⎛
⎝
d/D −b/D (−dp + bq)/D−c/D a/D (cp − aq)/D
0 0 1
⎞
⎠ ,
where D = det(
a bc d
)
= ad − bc. This is also a matrix describing a proper affinetransformation. (Exercise: what must you do to ensure that it actually describes aproper transform? Do it. This exercise confirms the claim that an affine transformationis proper if and only if the matrix
(a bc d
)
is invertible.) If we write the matrix describingthe original transform in the form
B =(
A t0 1
)
,
where
A =(
a bc d
)
, 0 =(0 0
)
, and t =(
pq
)
,
then its inverse may be written as
B−1 =(
A t0 1
)−1
=(
A−1 −A−1t0 1
)
.

2.2 Symmetry Group and Affine Transformations 55
Note that B−1 is of the same form as B: its third row is (0 0 1). Furthermore, notethat the linear transformation A−1 is also invertible.
The set of all proper affine transformations forms a group.
Definition 2.3 A set E equipped with a multiplication operation E×E → E is a groupif it satisfies the following properties:
1. associativity: (ab)c = a(bc),∀a, b, c ∈ E;2. existence of an identity element: there exists an element e ∈ E such that ea = ae =
a,∀a ∈ E;3. existence of inverses: ∀a ∈ E, ∃b ∈ E such that ab = ba = e.
The inverse of an element a is usually denoted by a−1.
Groups play an important role in several other chapters. See, for example, Section 1.4and Section 7.4.
It is easy to verify that the set of matrices representing proper affine transformationsforms a group. Thus, the set of affine transformations itself forms a group. This is whatwe check now.
Proposition 2.4 The set of matrices representing proper affine transformations formsa group under matrix multiplication. The set of proper affine transformations also formsa group under composition. The latter is called the affine group.
Proof : Consider the matrix
B =(
A t0 1
)
representing a proper affine transformation. Since the affine transformation is proper,A is an invertible 2 × 2 matrix and therefore the matrix B is itself invertible. Beingof the same form as B, the matrix B−1 also represents a proper affine transformation,and condition 3 holds. Property 1 holds because matrix multiplication is itself associa-tive, and property 2 holds using the 3 × 3 identity matrix, which represents the affinetransformation ⎛
⎝
1 0 00 1 00 0 1
⎞
⎠ ←→{
x′ = x,
y′ = y.
Therefore the set of matrices representing proper affine transformations forms a group.We have seen that there is a one-to-one correspondence between matrices (with last line(0 0 1)) and affine transformations. Moreover, the composition of affine transformationsis represented by matrix multiplication through this correspondence. The verificationabove automatically holds for the proper affine transformations themselves. �
Earlier, we introduced reflections with respect to horizontal and vertical mirrors. Asexamples, we now give their matrix representation. To obtain these, we need to fix theorigin. We shall place it at equal distance between the top and bottom of the frieze.

56 2 Friezes and Mosaics
Fig. 2.4. The coordinate system.
(See Figure 2.4.) This still leaves some freedom, since any point on the horizontal axisin the middle of the frieze is a possible choice. (We have already underlined this freedomwhen discussing the position of vertical mirrors. We shall also use this freedom in theproof of Lemma 2.10.) For a given choice along the horizontal axis, the reflection rh
that exchanges top and bottom (that is, that exchanges the positive vertical axis withthe negative one) is represented by the matrix
⎛
⎝rh
00
0 0 1
⎞
⎠ , where rh =(
1 00 −1
)
,
and the reflection rv that exchanges left and right is⎛
⎝rv
00
0 0 1
⎞
⎠ , where rv =(−1 00 1
)
if the origin is on the mirror. (Exercise: check these claims.) Note that
rhrv =(
1 00 −1
)(−1 00 1
)
=(−1 00 −1
)
.
We observe again that the rotation by an angle of 180◦ (or π) can be obtained by areflection in a vertical mirror followed by a reflection in a horizontal one. (Exercise:determine the 3 × 3 matrices that represent the translation tL and the glide reflectionsg.)
The definition of an affine transformation makes it a function from R2 to R
2. Therequirement that these functions leave a frieze invariant restricts the set of affine trans-formations that we need to consider. But a second restriction is made that limits theaffine transformations even more.
Definition 2.5 An isometry of the plane (or of a region of the plane) is a functionT : R
2 → R2 (or T : F ⊂ R
2 → R2) that preserves lengths. Hence, if (x1, y1) and
(x2, y2) are two points, then the distance between them is equal to the distance betweentheir images T (x1, y1) and T (x2, y2).

2.2 Symmetry Group and Affine Transformations 57
Definition 2.6 A symmetry of a frieze is an isometry that maps the frieze onto thefrieze.
Exercise 9 will show that an isometry is an affine transformation. Lemma 2.7 showsthat this restriction to isometric affine transformations limits significantly the possiblelinear transformations A that can play a role.
Lemma 2.7 Let the isometry represented by the matrix(
A 00 1
)
be a symmetry of a frieze. Then the 2 × 2 block is one of the four matrices(
1 00 1
)
, rh =(
1 00 −1
)
, rv =(−1 00 1
)
, and rhrv =(−1 00 −1
)
. (2.3)
Proof: A linear transformation is completely determined by its action on a basis. Weshall use the basis {u,v}, where u and v are horizontal and vertical vectors of lengthequal to half the width of the frieze. With this choice any point of the frieze is of theform (x, y) = αu + βv with α ∈ R and β ∈ [−1, 1]. (The constraint β ∈ [−1, 1] ensuresthat the point (x, y) is within the frieze.) The two basis vectors are perpendicular(u ⊥ v) or, equivalently, their inner product vanishes: (u,v) = 0.
To check whether ( A 00 1 ) represents an isometry, it is sufficient to check that
|Au| = |u|, |Av| = |v|, and Au ⊥ Av. (2.4)
Indeed, if P and Q are two points in the frieze and Q − P = αu + βv is the vectorbetween them, then the image of Q − P is A(αu + βv) and the square of its length isgiven by
|A(αu + βv)|2 = (αAu + βAv, αAu + βAv)
= α2|Au|2 + 2αβ(Au, Av) + β2|Av|2
= α2|u|2 + β2|v|2
= (αu + βv, αu + βv)
= |αu + βv|2,
where we have used, to obtain the third equality, the three relations of (2.4) and, for thefourth, the fact that the basis vectors are perpendicular. Then the distance between anypair of points P and Q is preserved by A if the relations (2.4) are satisfied. (Exercise:show that these relations are also necessary.)
Let Au = γu + δv be the image of u by A. Since the transformation is linear,A(βu) = β(γu + δv). If δ is nonzero, then it is possible to choose β ∈ R sufficientlylarge that |βδ| > 1. This means that the point A(βu) is outside the frieze. Since this

58 2 Friezes and Mosaics
must be ruled out, δ has to be set to zero. (In other words, a transformation A suchthat δ is nonzero is a linear transformation that tilts the frieze out of the horizontal.)Thus Au = γu, and if |Au| = |u|, we must have γ = ±1.
Now let Av = ρu+σv be the image of v under A. Since Au must be perpendicularto Av, we must have
0 = (Au, Av) = (γu, ρu + σv) = γρ|u|2.
Since neither γ nor |u| is zero, ρ must be set to 0. And again the last condition |Av| = |v|fixes σ to be ±1. The matrix A representing the transformation in the basis {u,v} isthen
(γ 00 σ
)
. There are two choices for each γ and σ and thus four for the matrix A,precisely those appearing in the statement. �
The composition of two isometries and the inverse of an isometry are themselvesisometries. Thus the subset of isometric transformations of the affine group itself formsa group, called the group of isometries. Finally, the composition of two isometriesleaving a frieze unchanged itself leaves the frieze unchanged. The subset of the groupof isometries that leaves the frieze invariant is therefore a group. We are led to thefollowing definition.
Definition 2.8 The group of symmetry of a frieze is the group of all isometries thatleave the frieze invariant.
2.3 The Classification Theorem
Having a formal theory of isometries and affine transformations allows us to createa list of such transformations that could leave a frieze unchanged. This section willfirst establish a complete list of possible symmetry generators. The second part of thissection uses this list of transformations to enumerate and classify all possible types ofgroups of frieze symmetries.
There are many affine transformations that simply cannot appear in the symmetrygroup of a frieze. Lemma 2.7 has already rejected the linear transformations that tiltthe frieze out of its domain (the constraint δ = 0 excludes these transformations). Thefollowing lemmas characterize the transformations that can appear in frieze symmetrygroups. The first describes translations along the infinite axis of the frieze.
Lemma 2.9 The symmetry group of any frieze of period L contains the translations⎛
⎝
1 0 nL0 1 00 0 1
⎞
⎠ , n ∈ Z.
These are the only translations that appear in the symmetry group.

2.3 The Classification Theorem 59
Proof: The translation
tL =
⎛
⎝
1 0 L0 1 00 0 1
⎞
⎠
leaves any frieze with period L unchanged. Observe that the inverse of this translationis
t−L =
⎛
⎝
1 0 −L0 1 00 0 1
⎞
⎠
and that its composition n times yields
tnL =
⎛
⎝
1 0 nL0 1 00 0 1
⎞
⎠ .
(Exercise!) The translation tnL must therefore be in the symmetry group for all n ∈ Z.No translation of the form
⎛
⎝
1 0 a0 1 b0 0 1
⎞
⎠
with b = 0 can leave a frieze unchanged, since the vertical portion of the translationwill map certain points of the frieze outside of its original vertical extent. We are leftwith possible translations of the form
⎛
⎝
1 0 a0 1 00 0 1
⎞
⎠ ,
where a is not an integer multiple of L. After performing such a translation by ( a0 ), one
can repeatedly perform a translation by ( L0 ) or
(−L0
)
until the resulting translation isby
(a′0
)
, where a′ satisfies 0 ≤ a′ < L. If 0 < a′ < L, it is a translation by a constanta′ smaller than the period L, contradicting the definition of the period. And if a′ = 0,then the original a was an integer multiple of the period L. The only translations leftare therefore tnL, n ∈ Z. �
Are there any other transformations of the form(
A t0 1
)
where A is not the identity matrix and t is nonzero? The next lemma answers thisquestion.

60 2 Friezes and Mosaics
Lemma 2.10 Consider isometries of the form ( A t0 1 ), where t is nonzero. By redefining
the origin it is possible to reduce any such transformation to one of the form
(i)
⎛
⎝A
nL0
0 0 1
⎞
⎠ , (ii)
⎛
⎝
1 0 L/2 + nL0 −1 00 0 1
⎞
⎠ , and (iii)
⎛
⎝
−1 0 L/2 + nL0 1 00 0 1
⎞
⎠ ,
where n ∈ Z and A is one of the four allowed by Lemma 2.7. Form (iii) may occur onlyif the rotation rhrv is also a symmetry.
Proof: By definition of an isometry, lengths must be preserved. Since the distancebetween two points is the same as the distance between any translation of the same twopoints, the matrix A must be one of the four given in (2.3). Moreover, if ty = 0 in
⎛
⎝
a b txc d ty0 0 1
⎞
⎠ ,
then y′ = cx + dy + ty will be outside of the frieze for certain values of x and y. In fact,for the four possible matrices A, the image of the square [−1, 1] × [−1, 1] is the squareitself. Every translation that has ty = 0 moves the square vertically and takes somepoints of this square out of the frieze. Thus, ty must be zero.
Since the symmetry group of a frieze contains all horizontal translations by integermultiples of L, the presence of
⎛
⎝
a 0 tx0 d 00 0 1
⎞
⎠
in the group implies the presence of⎛
⎝
1 0 nL0 1 00 0 1
⎞
⎠
⎛
⎝
a 0 tx0 d 00 0 1
⎞
⎠ =
⎛
⎝
a 0 tx + nL0 d 00 0 1
⎞
⎠
for all n ∈ Z. Out of the set of all such transformations there will be one such that0 ≤ t′x = tx + nL < L.
We now consider the four possibilities for A. If A is the identity matrix, then Lemma2.9 forces t′x to be zero, and the resulting matrix is of the form (i).
Let A = rh. Then the square of⎛
⎝rh
t′x0
0 0 1
⎞
⎠
must also be in the symmetry group of the frieze. However,
2.3 The Classification Theorem 61
⎛
⎝
1 0 t′x0 −1 00 0 1
⎞
⎠
2
=
⎛
⎝
1 0 2t′x0 1 00 0 1
⎞
⎠
is a translation. Thus there exists m ∈ Z such that 2t′x = mL. Since 0 ≤ t′x < L, wehave that 0 ≤ 2t′x < 2L. If t′x = 0, the translation is trivial. Otherwise, we must havethat t′x = L/2, and the affine transformation becomes
⎛
⎝
1 0 L/20 −1 00 0 1
⎞
⎠ . (2.5)
It remains to consider the two cases A =(−1 0
0 −1
)
and(−1 0
0 1
)
. Here we will use ourfreedom in choosing the origin. (See the remarks after the proof of Proposition 2.9.)Consider translating the origin along the x axis by a distance a. The matrix describingthe coordinate change is given by
S =
⎛
⎝
1 0 −a0 1 00 0 1
⎞
⎠ .
If T is the matrix representing an affine transformation and S the matrix changing thecoordinate system (x, y) to a new one (x′, y′), the same affine transformation will berepresented by the matrix STS−1 in the new system. To see this, we read as usualfrom right to left. This expression first transforms the coordinates (x′, y′) of a pointinto its coordinates (x, y) in the old system using S−1, applies the affine transformationrepresented in these old coordinates by the matrix T , and transforms the result backwith S into the new coordinate system. The affine transformation represented by
⎛
⎝
−1 0 t′x0 ±1 00 0 1
⎞
⎠ (2.6)
will therefore be represented by the matrix⎛
⎝
1 0 −a0 1 00 0 1
⎞
⎠
⎛
⎝
−1 0 t′x0 ±1 00 0 1
⎞
⎠
⎛
⎝
1 0 a0 1 00 0 1
⎞
⎠
=
⎛
⎝
−1 0 t′x − a0 ±1 00 0 1
⎞
⎠
⎛
⎝
1 0 a0 1 00 0 1
⎞
⎠ =
⎛
⎝
−1 0 t′x − 2a0 ±1 00 0 1
⎞
⎠
in the new system. (Exercise: It is crucial to check that this coordinate change does notspoil the form of other symmetry operations. Show that transformations represented by( A t
0 1 ) with A equal to ( 1 00 1 ) or rh keep the same matrix representation after a horizontal

62 2 Friezes and Mosaics
translation of the origin.) Thus the affine transformation represented by (2.6) is nowrepresented by
⎛
⎝
−1 0 00 ±1 00 0 1
⎞
⎠ (2.7)
if we displace the origin by precisely a = t′x/2.Note that if the symmetry group contains two transformations of the form (2.6)
with distinct t′x1, t′x2 ∈ [0, L), then moving the origin assures us that the transformation
with t′x1 can be written in the form (2.7). The second remains of the form (2.6) witht′x2 replaced by tx2 = t′x2 − t′x1. If both transformations have the same A, then theircomposition will be a translation by tx2 , forcing tx2 to be nL for some integer n. In thiscase both transformations are cast into form (i) by the change of origin. If, however, thetwo transformations have different A’s, we may suppose that the first has A =
(−1 00 −1
)
and then it is a rotation rhrv by 180◦. The composition of the two is then⎛
⎝
1 0 tx2
0 −1 00 0 1
⎞
⎠ ,
and by previous arguments, tx2 must be either nL or nL + L2 for some integer n. The
second transformation is then of the form (i) if tx2 is an integer multiple of L or of theform (iii) if not. �
The first two forms of isometries allowed by Lemma 2.10 are then (i) the compo-sition of one of the linear transformations of Lemma 2.7 and a translation tnL by aninteger multiple of the period L and (ii) the composition of the glide reflection sg anda translation tnL. The third form (iii) may appear only if rhrv is also present, and inthis case, one can use rhrv and the isometry of the form (ii) (with n = 0) as genera-tors. Hence the three lemmas together show that the symmetry group of a frieze canbe generated by a subset of {tL, rh, rv, rhrv, sg}. This answers the question of the listof possible generators, a question left open at the end of Section 2.1.
The lemmas will now allow us to finish our classification of the symmetry groups ofvarious friezes, which will provide us with an affirmative answer to our earlier question:is it possible to classify friezes based on the set of geometric operations under which theyare invariant? When describing the various possible symmetry groups we will simplyreference the generators of each group. We recall formally the definition of such a listof generators.
Definition 2.11 Let {a, b, . . . , c} be a subset of a group G. This set is a set of genera-tors for G, and then we write G = 〈a, b, . . . , c〉 if the set of all compositions of a finitenumber of elements of {a, b, . . . , c} and of their inverses is G.
Theorem 2.12 (Classification of frieze groups) The symmetry group of any friezeis one of the following seven groups:
2.3 The Classification Theorem 63
1. 〈tL〉2. 〈tL, rv〉3. 〈tL, rh〉4. 〈tL, tL/2rh〉5. 〈tL, rhrv〉6. 〈tL, tL/2rh, rhrv〉7. 〈tL, rh, rv〉Each of these groups is described by a set of generators, and they are presented in thesame order as those in Figures 2.1 and 2.2.
Proof: Let tL represent translation by a distance L along the horizontal axis. All ofthe groups contain translations by integer multiples of L, the period of the frieze, andthe list of generators must contain tL. Through an appropriate choice for the origin, theonly other generators of the symmetry groups will be the linear transformations denotedby A = rh, rv or rhrv and the glide reflection sg allowed by Lemma 2.10. Note thatif a symmetry group contains any two of rh, rv, and rhrv then it must automaticallycontain all three. The list of all possible combinations of generators therefore consistsof the seven given in the statement of the theorem as well as
8. 〈tL, tL/2rh, rh〉9. 〈tL, tL/2rh, rv〉10. 〈tL, tL/2rh, rh, rv〉(See the discussion at the end of Section 2.1, where this list was first constructed.) Werepeat here the argument that forces us to reject the case 8. The presence of sg = tL/2rh
and rh implies that the group must also contain their product (tL/2rh)rh = tL/2(r2h) =
tL/2, which is a translation by L/2 (since r2h = Id). This contradicts the fact that the
frieze is periodic with a minimum period of L, and therefore this set must be rejected.For case 9, note that the product of sg and rv is of the form tL/2rhrv discussed
in Lemma 2.10. Through a translation of the origin (by a = L4 ), this product can
be written in the form of (2.7) with A = rhrv. A simple calculation shows that thegenerators tL and sg are unchanged by this translation but that rv becomes sg = tL/2rv.Thus subgroup 9 is equally described by the generators 〈tL, tL/2rh, tL/2rv, rhrv〉. Threeof these generators belong to 6, while the fourth (tL/2rv) is simply the product of tL/2rh
and rhrv. Case 9 is in fact identical to case 6 and it may be omitted.Finally, case 10 contains the generators of case 8 and can be eliminated for the same
reason.Thus the symmetry group of any frieze must be one of the seven listed groups. Is
there any redundancy in this list? No, and with the help of Figure 2.2 we can easilyconvince ourselves of this fact. The full argument is rather tedious, and thus we willrestrict ourselves to frieze 4, whose symmetry group was determined to be 〈tL, sg〉. Wefirst observe that the two generators tL and sg are both symmetries of this frieze. Thegroup they generate must therefore be a subgroup of the actual symmetry group of thefrieze. Can we add any other generators to these two? A quick inspection shows that
64 2 Friezes and Mosaics
no such addition (from among the remaining possibilities rh, rv, rhrv) is possible. Thus〈tL, sg〉 is indeed the entire symmetry group of the frieze 4. Finally, since group 1 isdistinct from 4 and the remaining five groups each contain at least one of rh, rv, andrhrv which group 4 does not have, then group 4 is in fact distinct from the other six.Repeating an argument of this type for each of the remaining friezes and symmetrygroups shows that the list is exhaustive and does not contain any redundancy. �
2.4 Mosaics
In architecture, mosaics are as popular, if not more popular, than friezes. For us, amosaic will be a pattern that can be repeated to fill the plane and that is periodicalong two linearly independent directions. Thus, a mosaic has two linearly independentvectors t1 and t2 along which it may be translated without change.
As with friezes, mosaics may be studied in terms of the symmetry operations thatleave them unchanged. And as with friezes, they may also be classified by their sym-metry groups. Due to their importance in the physics and chemistry of crystals, theyare referred to as the crystallographic groups. There are 17 crystallographic groups.We will not derive this classification. We will limit ourselves to enumerating the rota-tions that may appear in the symmetry groups of mosaics, and to understanding thedescription of the classification.
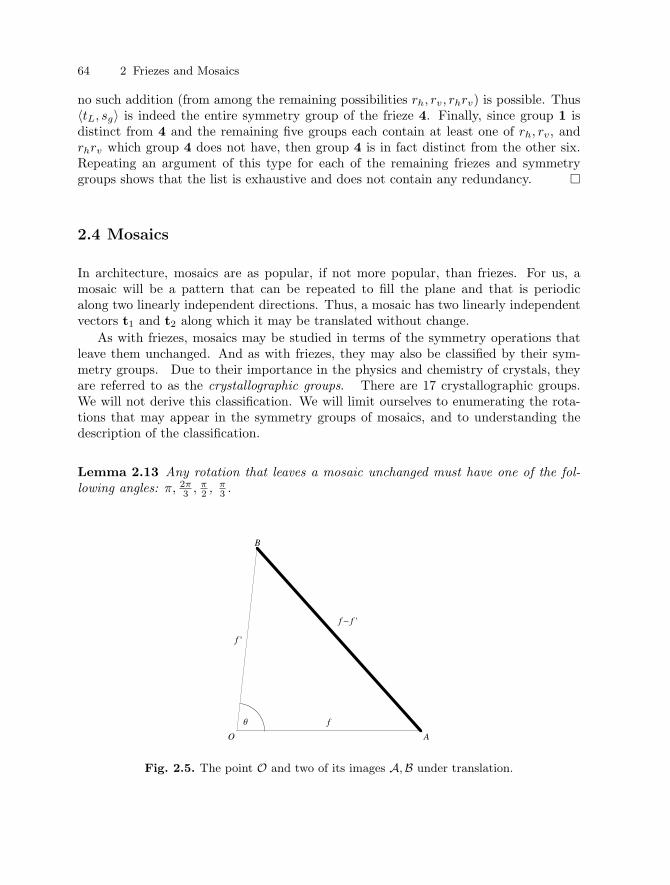
Lemma 2.13 Any rotation that leaves a mosaic unchanged must have one of the fol-lowing angles: π, 2π
3 , π2 , π
3 .
Fig. 2.5. The point O and two of its images A,B under translation.

2.4 Mosaics 65
Proof: Let O be the center of a rotation leaving the mosaic unchanged. Let θ = 2πn be
the smallest angle describing the rotation about this point. Since the mosaic is periodicin two linearly independent directions, there exists an infinity of such points. Let f bea vector joining O to a nearby image A chosen among the closest images of O obtainedby translations. Then translation along the vector f belongs to the symmetry group ofthe mosaic.
By rotating the mosaic about O by an angle θ, the point A is mapped to B. Thevector f ′ joining O to B also describes a translation under which the mosaic is invariant(see Figure 2.5). The distance between A and B is the length of the vector f ′ − f , andsince f ′ − f is also a translation leaving the mosaic unchanged, this distance must begreater than or equal to the length of f by hypothesis. (A was one of the nearest imagesof O.) Since f and f ′ are of the same length, it must be that the angle θ = 2π
n is greaterthan or equal to 2π
6 = π3 (which is 60◦). In fact, π
3 is the precise angle such that f ,f ′, and f ′ − f are all the same length. This first argument restricts the possibilities to2π2 = π, 2π
3 , 2π4 = π
2 , 2π5 , and 2π
6 = π3 .
Fig. 2.6. The case of rotation by an angle 2π5
.
However, no mosaic can be left unchanged after rotation by an angle of 2π5 . Figure
2.6 shows f and its image f ′′ after a rotation of 4π5 . Translation along f +f ′′ must also be
an invariant operation, but its length is shorter than that of f , a contradiction. Thus,we can safely reject this angle. �
The elements of the crystallographic groups are similar to those found in the friezesymmetry groups: translations, reflections, reflections followed by translations (thatis, glide reflections as for friezes), and rotations. Rather than exhaustively listing thegenerators for each of the 17 crystallographic groups, we will instead show an example of
66 2 Friezes and Mosaics
Fig. 2.7. Penrose tiles.
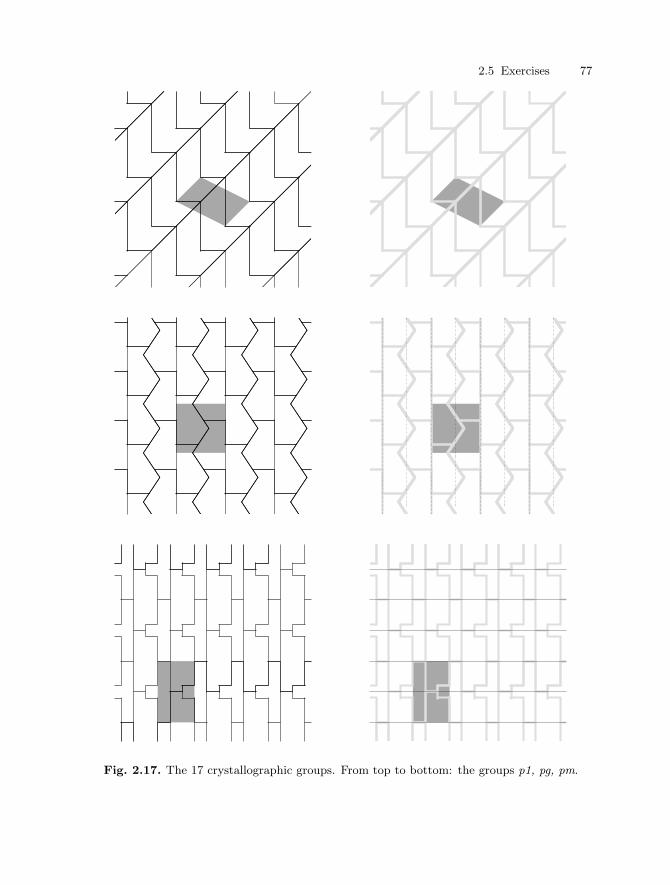
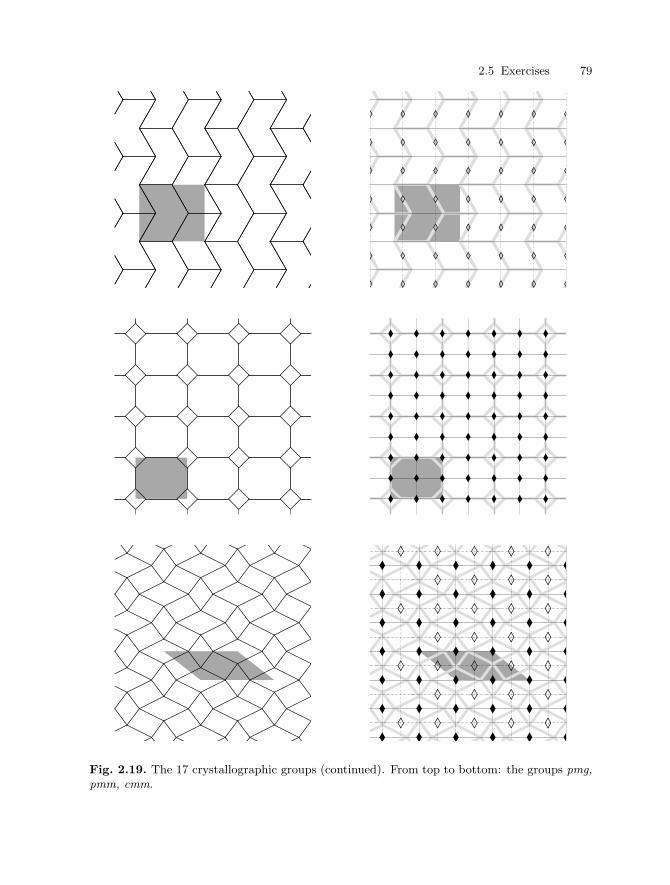
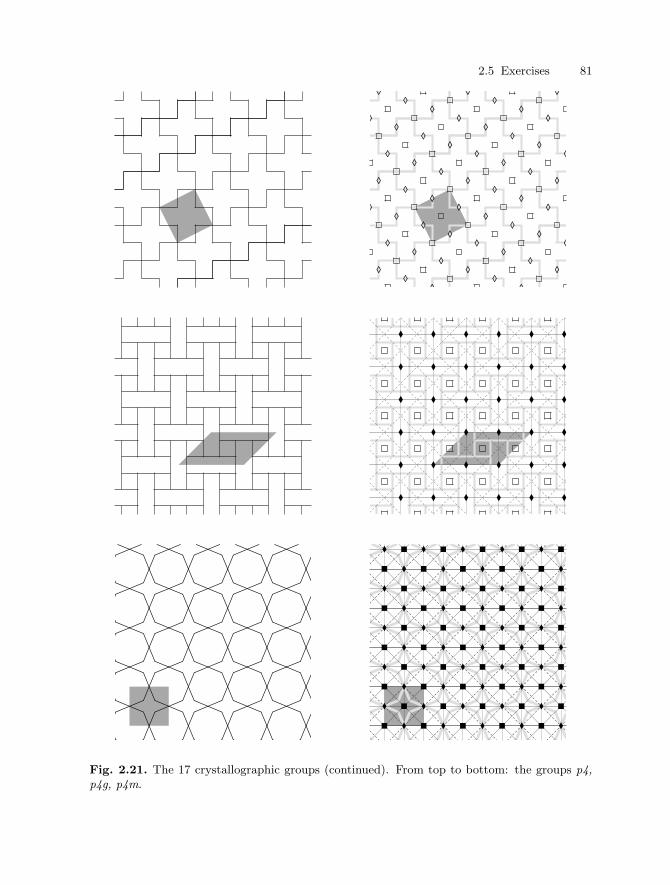
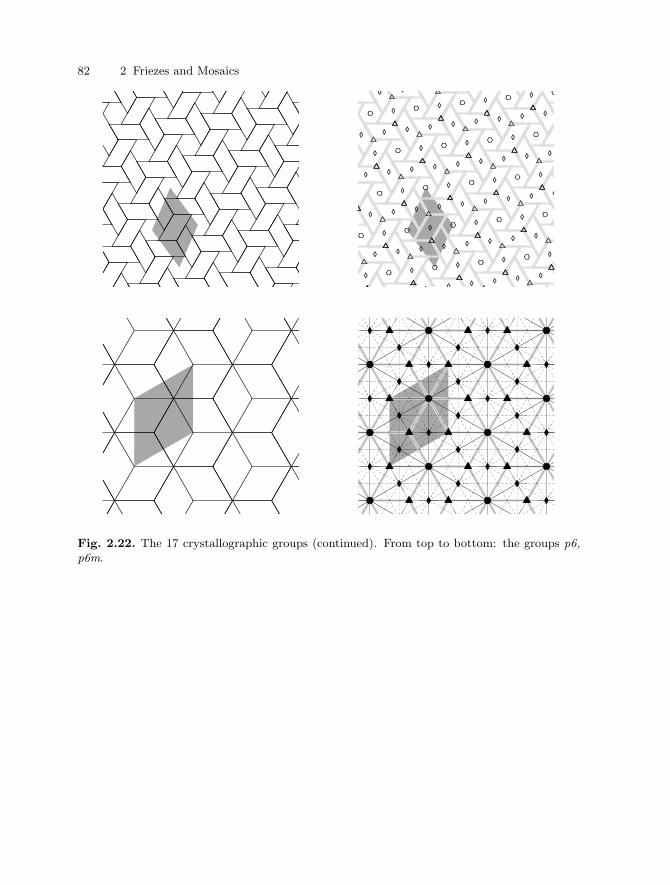
each type and highlight its symmetries (see Figures 2.17 through 2.22, starting on page77). For each class we illustrate the basic shape of the mosaic at the left, overlaid witha shaded parallelogram whose sides indicate the two linearly independent directionsin which the mosaic may be translated. These vectors have been chosen such thatthe parallelogram encloses the smallest possible area necessary to cover the plane bytranslations along them. There is usually more than one choice for this parallelogram.On the right, the same mosaic has been drawn again with axes of reflection or glidereflection and points of rotation overlaid. Finally, the legend of each graph identifiesthe international symbols commonly used to designate each crystallographic group [5].Solid lines indicate that a simple reflection across the axis is a symmetry. Dashed linesindicate glide reflections; the required translations are not explicitly shown but areeasily seen nonetheless. Various symbols are used to indicate points about which themosaic may be rotated. If the center of rotation does not fall on an axis of reflection,the following are used:
� for rotations of angle π,� for rotations of angle 2π
3 ,� for rotations of angle π
2 ,and hexagons for rotations of angle π
3 .
When the point of rotation lies along an axis of reflection, solid versions of the samesymbols (�, �, etc.) are employed.
The ancient city of Alhambra, seat of the Moorish government of Granada in thesouth of modern-day Spain, houses many mosaics that are as stunning in number as theyare in complexity. For a long time it was debated whether all 17 crystallographic groupswere represented by the Alhambra mosaics. Grunbaum, Grunbaum, and Shephard [4]claim that this is not the case, with only 13 groups being employed. Even with thisnegative response, it is still natural to ask whether the Moorish artists of the time wereaware of such a system of classification.
The precise mathematical formalization of friezes and mosaics allowed mathemati-cians to study new generalized structures by relaxing certain rules in the definition.Aperiodic tilings are one such structure. All mosaics must fill the plane, meaning thatrepeating the pattern in all directions covers all points of R
2 without leaving any gaps.
2.5 Exercises 67
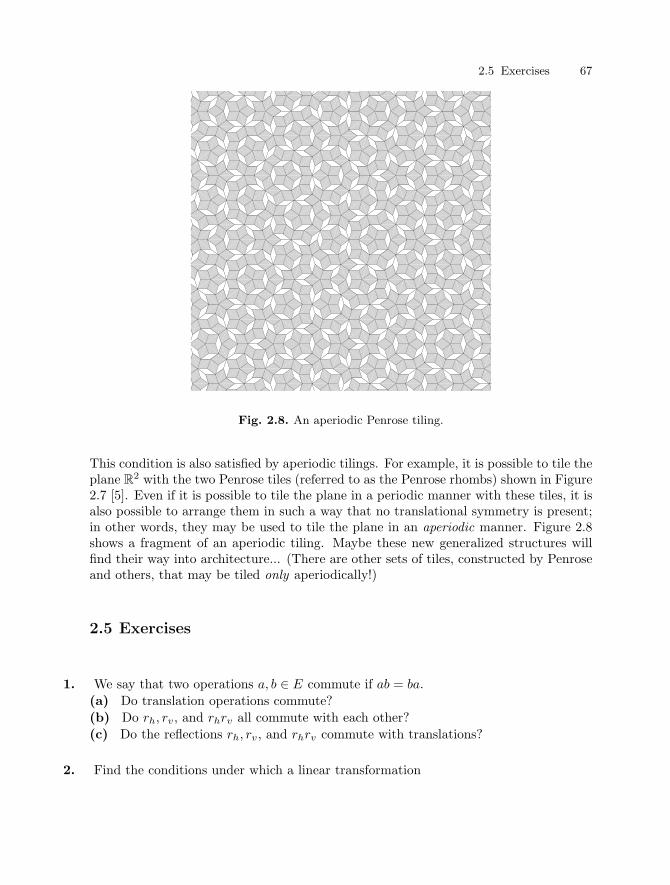
Fig. 2.8. An aperiodic Penrose tiling.
This condition is also satisfied by aperiodic tilings. For example, it is possible to tile theplane R
2 with the two Penrose tiles (referred to as the Penrose rhombs) shown in Figure2.7 [5]. Even if it is possible to tile the plane in a periodic manner with these tiles, it isalso possible to arrange them in such a way that no translational symmetry is present;in other words, they may be used to tile the plane in an aperiodic manner. Figure 2.8shows a fragment of an aperiodic tiling. Maybe these new generalized structures willfind their way into architecture... (There are other sets of tiles, constructed by Penroseand others, that may be tiled only aperiodically!)
2.5 Exercises
1. We say that two operations a, b ∈ E commute if ab = ba.(a) Do translation operations commute?(b) Do rh, rv, and rhrv all commute with each other?(c) Do the reflections rh, rv, and rhrv commute with translations?
2. Find the conditions under which a linear transformation

68 2 Friezes and Mosaics
⎛
⎝
a b 0c d 00 0 1
⎞
⎠
and a translation⎛
⎝
1 0 p0 1 q0 0 1
⎞
⎠
will commute with each other.
Fig. 2.9. The frieze of Exercise 3.
3. (a) Determine the period L of the frieze in Figure 2.9. Indicate it directly on the figureor a copy of it.(b) Under which of the transformations tL, rh, sg, rv, rhrv is the frieze invariant?(c) Which of the seven symmetry groups does the frieze belong to?(d) By drawing a single point per period on the frieze, reduce its symmetry group to〈tL〉 without changing the length of its period.
4. (a) Friezes are often used in architecture, with [3] giving several remarkable examples.Select a few such examples, and determine to which of the symmetry groups they belong.(b) The artist M. C. Escher created several remarkable mosaics, with a large numberof them being presented in [6]. Select a few of Escher’s mosaics and determine to whichof the 17 crystallographic groups they belong.
5. (a) Identify the symmetry group of the frieze shown in Figure 2.10.
Fig. 2.10. Frieze for Exercise 5.
(b) By removing two triangles from each period of this frieze, construct a friezebelonging to the symmetry group 5.
2.5 Exercises 69
6. Prove the three statements of Proposition 2.1. Suggestion: these properties can beproved using only Euclidean geometry or using the matrix representation of affine trans-formations. Explore both approaches.
7. (a) Let m1 and m2 be parallel lines at a distance d and let rm1 and rm2 be thereflections through these lines. Show that the composition rm2rm1 is a translation bya distance 2d along a direction perpendicular to the lines (mirrors) m1 and m2. Hint:show this using only Euclidean geometry, that is, without use of a coordinate system.You may use the concept of distance or length of a segment.(b) Let a frieze of period L be invariant under the reflection rv. Show that it isinvariant under reflection through a vertical mirror at distance L
2 from the first. Hint:study the composition of rv and the translation tL.
8. Let m1 and m2 be two lines intersecting at P and let rm1 and rm2 be the reflectionsthrough these lines. Show that the composition rm2rm1 is a rotation of center P bytwice the angle between the two lines (mirrors) m1 and m2. Hint: show first that theimages rm1Q and Q′ = rm2rm1Q lie on a circle of center P and of radius |PQ|. Thenstudy the angles made by the segments PQ and PQ′ with a given line, say m1.
9. The goal of this exercise is to show that an isometry is the composition of a lineartransformation and a translation and therefore is an affine transformation. (Either thelinear transformation or the translation could be the identity.) Recall that a lineartransformation of the plane is a function T : R
2 → R2 that satisfies the following two
conditions: (i) T (u+v) = T (u) + T (v) and (ii) T (cu) = cT (u) for all points u,v ∈ R2
and constant c ∈ R.(a) Show that an isometry T : R
2 → R2 preserves angles. Hint: choose three (non-
collinear) points P,Q,R. If P ′, Q′, R′ are their images under T , show that the trianglesPQR are P ′Q′R′ are congruent.(b) Show that a translation is an isometry.(c) Suppose that an isometry S has no fixed-point and that S(P ) = Q. Show thatthe composition TS, where T is the translation that maps Q to P , has at least onefixed-point.(d) Let S be an isometry that has (at least) one fixed-point O. Let P,Q,R be chosensuch that OPQR is a parallelogram. Let P ′, Q′, R′ be their image under S. Showthat the sum of the vectors OP ′ and OR′ is OQ′. (This amounts to S(OP + OR) =S(OP ) + S(OR).)(e) Let S be an isometry that has (at least) one fixed-point O and let P and Q be twopoints, distinct and distinct from O, such that O,P,Q are collinear. Show that
S(OP ) =|OP ||OQ|S(OQ).

70 2 Friezes and Mosaics
(f) Conclude that an isometry is a linear transformation followed by a translationand is therefore an affine transformation. (Either of the two operations could be theidentity.)
10. (a) The pattern of Figure 2.11 consists of a series of ellipses centered along the x axisat the points (2i, 0) with principal axes rx = 2i−2, ry = 1. Thus, this pattern existsover the infinite half-strip (0,∞)× [− 1
2 , 12 ]. This pattern is not a frieze because it is not
periodic. Replace the periodicity condition with another invariance condition such thatthis pattern is a “frieze.”(b) Describe the transformation that maps one ellipse to the first one on its left. Is itlinear? Does the set of such transformations form a group?
Fig. 2.11. A pattern that is not periodic. (For Exercise 10.)
11. Let r > 1 be a real number and let
Ar ={
(x, y) ∈ R2∣∣∣
1r≤
√
x2 + y2 ≤ r
}
be the ring with center at the origin of the plane and delimited by the circles with radiir and 1
r .(a) Show that the set Ar is invariant under rotations of the form
Fig. 2.12. A circular frieze. (See Exercise 11.)
2.5 Exercises 71
(cos θ − sin θsin θ cos θ
)
for all θ ∈ [0, 2π). (The invariance of Ar means that the transformation is invertibleand that the image of Ar is Ar itself.)(b) Consider the transformation R
2 \ {(0, 0)} → R2 \ {(0, 0)} defined by
x′ =x
x2 + y2,
y′ =y
x2 + y2.
This transformation is called an inversion. Show that Ar is invariant under this trans-formation. Show that A2
r is the identity transformation. Is this transformation linear?(c) Figure 2.12 represents a circular frieze drawn on a ring Ar. The dashed linerepresents the circle of radius 1. Unlike the band friezes discussed earlier, circularfriezes are bounded. It is easy to construct a correspondence between the symmetries ofa band frieze presented in Section 2.2 and those of a circular frieze. Translations becomerotations, and reflection rh across the horizontal axis becomes inversion as introducedin (b). Define the transformation that corresponds to reflection rv across a vertical axis.We will call this last transformation reflection. Is reflection a linear transformation? (Asbefore, this transformation can be defined only after a suitable origin has been chosen.You will have to carefully choose a particular point of Ar through which the “mirror”will pass.)(d) Starting from the three operations of rotation, inversion, and reflection, constructa set of generators for the symmetry group of the circular frieze shown in Figure 2.12.
12. (a) This exercise continues the previous one. Let n be the largest integer for which acircular frieze is invariant under a rotation of 2π
n . We will suppose that n ≥ 2. Classifythe symmetry groups of a circular frieze for a given n. Does the classification dependon n in any way?(b) The order of a group is the number of elements in the group. The orders of thesymmetry groups of regular friezes are infinite, but those of circular friezes are finite.Calculate the orders of the groups you constructed in (a).
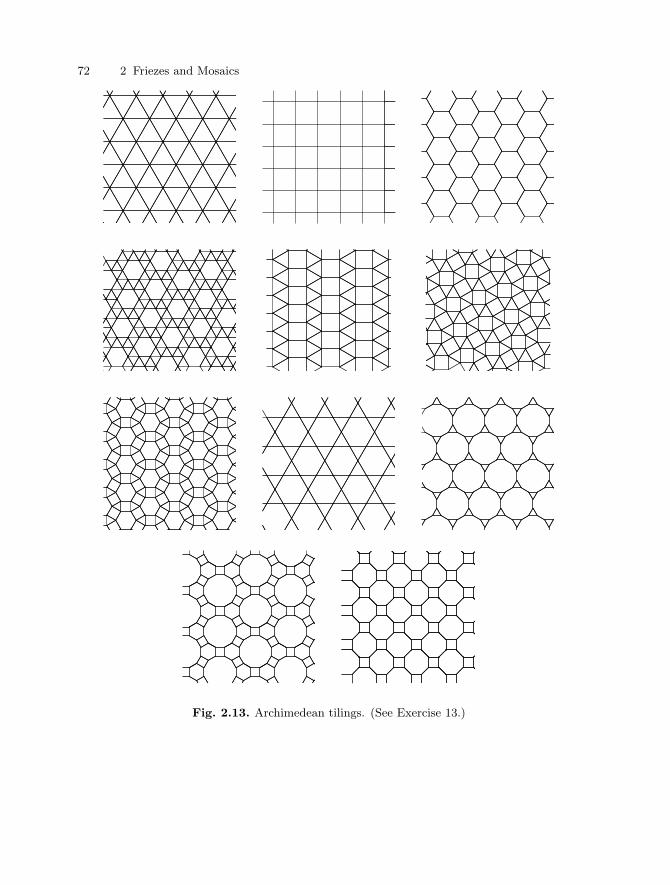
13. For each Archimedean tiling shown in Figure 2.13, determine to which of the 17 crys-tallographic groups it belongs (certain tilings must belong to the same group). AnArchimedean tiling is a tiling of the plane consisting of regular polygons such that eachvertex is of the same type. For two vertices to be of the same type, they must be coinci-dent with similar polygons, and the polygons must appear in the same order as we turnabout the point in a given direction (clockwise, for example). It is possible that themirror image of such a tiling is impossible to achieve through rotation and translationalone. If we assume that such tilings are unique up to their mirror image (when such animage is different from the original tiling), there are exactly 11 families of Archimedean
72 2 Friezes and Mosaics
Fig. 2.13. Archimedean tilings. (See Exercise 13.)

2.5 Exercises 73
tilings. The mirror image is distinct from the original tiling for exactly one of thesetilings. Identify it.
14. A small challenge: classify the Archimedean tilings (see Exercise 13).(a) Denote by n the regular polygon with n sides. Its internal angles are all equal to(n−2)π
n . (Prove this!) Consider an Archimidean tiling and let (n1, n2, . . . , nm) be thelist of the m polygons that meet at the vertices of this tiling. The sum of the angles ata given vertex must be 2π, and therefore
2π =(n1 − 2)π
n1+
(n2 − 2)πn2
+ · · · + (nm − 2)πnm
.
For example, for the Archimedean tiling of Figure 2.14, the polygons that meet at avertex are enumerated by the list (4, 3, 3, 4, 3), and as required, they satisfy
(4 − 2)π4
+(3 − 2)π
3+
(3 − 2)π3
+(4 − 2)π
4+
(3 − 2)π3
= 2π.
Enumerate all possible lists (n1, n2, . . . , nm) of polygons that may meet at a vertex.Hint: there are 17 such lists if we distinguish between them using only their size, notthe order of the ni’s.(b) Why does the list (5, 5, 10) not correspond to an Archimedean tiling of the plane?(c) For each of the lists determined in (a), verify whether the set of polygons(n1, n2, . . . , nm) meeting at a vertex actually describes a tiling of the plane. Caution:the order of the elements in the list (n1, n2, . . . , nm) is important!
Fig. 2.14. A closer look at an Archimedean tiling (see Exercise 14). The list of polygonsmeeting at a vertex is denoted by (4, 3, 3, 4, 3).

74 2 Friezes and Mosaics
Fig. 2.15. An icosahedron and the corresponding tiling of the sphere (see Exercise 15).
15. A challenge: classify the Archimedean tilings of the sphere. In Section 15.8, we see thateach regular polyhedron (the tetrahedron, the cube, the octahedron, the icosahedron,and the dodecahedron) corresponds to a regular tiling of the sphere. This correspon-dence is constructed as follows:
• the polyhedron is centered at the origin. The distance between the origin and eachof the vertices is therefore the same, and we circumscribe a sphere with this radiusthat passes through all of the vertices;
• for every edge of the polyhedron, we join the vertices by an arc from the great circlebetween them.
The end result is the desired tiling of the sphere. Figure 2.15 shows such a constructionfor an icosahedron. The construction can be repeated for any polyhedron whose verticesall lie along the surface of a sphere. This is the case with Archimedean polyhedra: allof their faces are regular polygons with the same side length and all of their cornersare incident to the same polygons. Even though regular polyhedra (also called Pla-tonic polyhedra) meet these requirements, we reserve the adjective “Archimedean” forpolyhedra whose faces consist of at least two different types of polygons. An exampleof an Archimedean polyhedron is the familiar shape of a soccer ball, formally called atruncated icosahedron (see Figure 2.16). Each vertex is shared by two hexagons anda pentagon. We denote it by the list (5, 6, 6). Archimedean tilings of the sphere areclassified as follows: prisms, antiprisms, and the 13 exceptional tilings. (Certain math-ematicians prefer to exclude the prisms and antiprisms from the Archimedean tilings,and use the term to refer only to the 13 remaining tilings.)(a) The list (n1, n2, . . . , nm) of polygons meeting at a vertex must satisfy two simpleconditions. In order for each vertex to be convex (and not planar), the sum of theinternal angles meeting at the vertex must be less than 2π:
π
m∑
i=0
ni − 2ni
< 2π.
2.5 Exercises 75
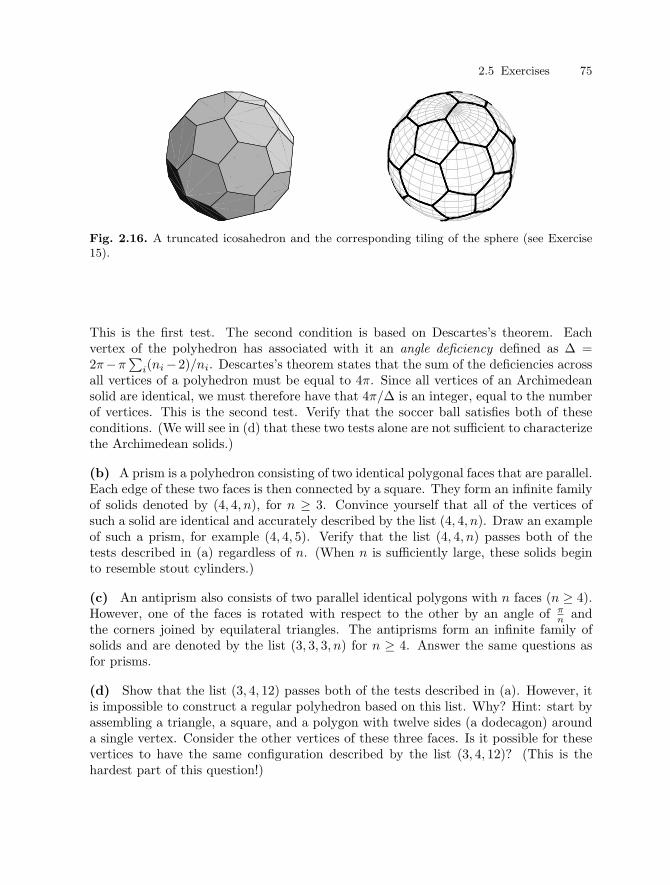
Fig. 2.16. A truncated icosahedron and the corresponding tiling of the sphere (see Exercise15).
This is the first test. The second condition is based on Descartes’s theorem. Eachvertex of the polyhedron has associated with it an angle deficiency defined as Δ =2π−π
∑
i(ni −2)/ni. Descartes’s theorem states that the sum of the deficiencies acrossall vertices of a polyhedron must be equal to 4π. Since all vertices of an Archimedeansolid are identical, we must therefore have that 4π/Δ is an integer, equal to the numberof vertices. This is the second test. Verify that the soccer ball satisfies both of theseconditions. (We will see in (d) that these two tests alone are not sufficient to characterizethe Archimedean solids.)
(b) A prism is a polyhedron consisting of two identical polygonal faces that are parallel.Each edge of these two faces is then connected by a square. They form an infinite familyof solids denoted by (4, 4, n), for n ≥ 3. Convince yourself that all of the vertices ofsuch a solid are identical and accurately described by the list (4, 4, n). Draw an exampleof such a prism, for example (4, 4, 5). Verify that the list (4, 4, n) passes both of thetests described in (a) regardless of n. (When n is sufficiently large, these solids beginto resemble stout cylinders.)
(c) An antiprism also consists of two parallel identical polygons with n faces (n ≥ 4).However, one of the faces is rotated with respect to the other by an angle of π
n andthe corners joined by equilateral triangles. The antiprisms form an infinite family ofsolids and are denoted by the list (3, 3, 3, n) for n ≥ 4. Answer the same questions asfor prisms.
(d) Show that the list (3, 4, 12) passes both of the tests described in (a). However, itis impossible to construct a regular polyhedron based on this list. Why? Hint: start byassembling a triangle, a square, and a polygon with twelve sides (a dodecagon) arounda single vertex. Consider the other vertices of these three faces. Is it possible for thesevertices to have the same configuration described by the list (3, 4, 12)? (This is thehardest part of this question!)
76 2 Friezes and Mosaics
(e) Show that there exist 13 Archimedean tilings of the sphere (or, equivalently, 13Archimedean polyhedra) that are neither prisms nor antiprisms. (The soccer ball is oneof these 13 solids.)
16. A difficult challenge: derive the crystallographic groups (shown in Figures 2.17–2.22).
2.5 Exercises 77
Fig. 2.17. The 17 crystallographic groups. From top to bottom: the groups p1, pg, pm.

78 2 Friezes and Mosaics
Fig. 2.18. The 17 crystallographic groups (continued). From top to bottom: the groups cm,p2, pgg.
2.5 Exercises 79
Fig. 2.19. The 17 crystallographic groups (continued). From top to bottom: the groups pmg,pmm, cmm.

80 2 Friezes and Mosaics
Fig. 2.20. The 17 crystallographic groups (continued). From top to bottom: the groups p3,p31m, p3m1.
2.5 Exercises 81
Fig. 2.21. The 17 crystallographic groups (continued). From top to bottom: the groups p4,p4g, p4m.
82 2 Friezes and Mosaics
Fig. 2.22. The 17 crystallographic groups (continued). From top to bottom: the groups p6,p6m.

References
[1] A. Bravais. Memoire sur les systemes formes par des points distribues regulierement surun plan ou dans l’espace. Journal de l’Ecole Polytechnique, 19:1–128, 1850.
[2] H.S.M. Coxeter. Introduction to Geometry. Wiley, New York, 1969.[3] E. Prisse d’Avennes, editor. Arabic Art in Color. Dover, 1978. (This book gathers some
excerpts of Prisse d’Avennes’s monumental work “L’art arabe d’apres les monuments duKaire depuis le VIIe siecle jusqu’a la fin du XVIIe siecle.” He assembled this collectionbetween 1869 and 1877. The work was originally published in 1877 in Paris by Morel.)
[4] B. Grunbaum, Z. Grunbaum, and G.C. Shephard. Symmetry in Moorish and other orna-ments. Computers and Mathematics with Applications, 12:641–653, 1985.
[5] B. Grunbaum and G.C. Shephard. Tilings and Patterns. W.H. Freeman, New York, 1987.[6] D. Schattschneider. Visions of Symmetry: Notebooks, Periodic Drawings, and Related Work
of M.C. Escher. W.H. Freeman, New York, 1992.