(19) 대한민국특허청(kr) (12)...
TRANSCRIPT
(19) 민 특허청(KR)
(12) 등 특허공보(B1)
(45) 공고 2017 03월03
(11) 등 10-1712116
(24) 등 2017 02월24
(51) 특허 (Int. Cl.)
B25J 9/16 (2006.01)
(52) CPC특허
B25J 9/1656 (2013.01)
B25J 9/1664 (2013.01)(21) 원 10-2015-0114432
(22) 원 2015 08월13
심사청 2015 08월13
(65) 공개 10-2017-0019916
(43) 공개 2017 02월22
(56) 술 사 헌
JP2013193194 A*
KR1020120075749 A*
과 술원 공 과 사(2014.3.)*
*는 심사 에 여 헌
(73) 특허
과 술원
역시 291( 동)
(72)
역시 291 ( 동)
승
역시 291 ( 동)
역시 291 ( 동)
(74) 리
연
체 청 수 : 8 심사 : 태수
(54) 지 생
(57) 약
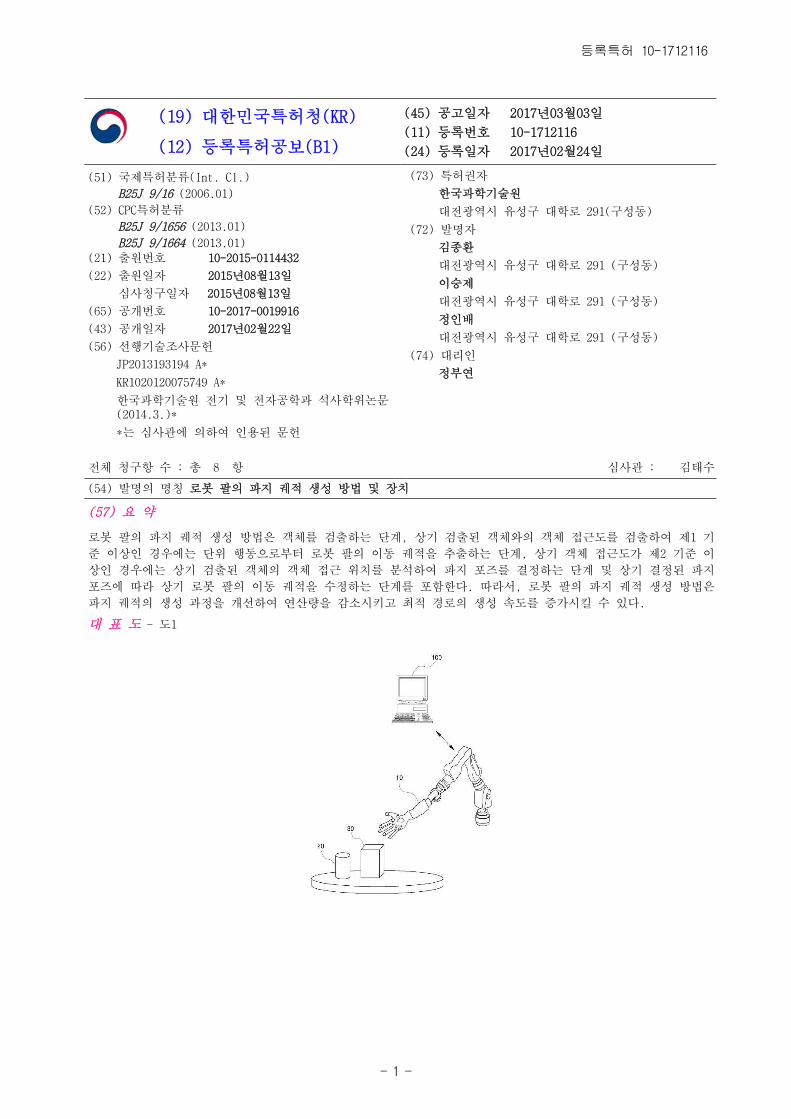
지 생 객체 검 는 단계, 상 검 객체 객체 근도 검 여 1
상 경우에는 단 동 동 는 단계, 상 객체 근도가 2
상 경우에는 상 검 객체 객체 근 여 지 포 결 는 단계 상 결 지
포 에 라 상 동 수 는 단계 포 다. 라 , 지 생
지 생 과 개 여 연산량 감 시키고 경 생 도 가시킬 수 다.
도 - 도1
등록특허 10-1712116
- 1 -
(52) CPC특허
B25J 9/1666 (2013.01)
B25J 9/1676 (2013.01)
지원 가연 개 사업
과 고 1415140041
처 산업통상 원
연 리 산업 술평가 리원
연 사업 산업 심 술개
연 과 지식습득과 상 지식 통 여 경험 상 에 주어진 업 80% 상 수 수 는 업지능 술 개
여 1/1
주 과 술원
연 간 2015.06.01 ~ 2016.05.31
등록특허 10-1712116
- 2 -
청
청 1
객체 검 는 단계;
상 검 객체 간 거리가 가 운 도 나타내는 객체 근도 검 여 1 상 고
2 미만 경우에는 단 동 상 동 는 단계;
상 객체 근도가 상 2 상 경우에는 상 검 객체 객체 근 여 지 포
결 는 단계;
상 결 지 포 에 라 상 동 수 는 단계 포 고,
상 동 수 는 단계는
상 동 는 동안 계 상 동 경 재생 는 단계 상 재생 동
경 상에 애 재 는 경우 상 동 경 수 가능 단 고, 상 동 경 수
라도 상 애 에 돌 는 경우 상 동 취 여 복귀 는 단계 포 는
지 생 .
청 2
1 에 어 , 상 동 수 는 단계는
상 객체 근도가 2 미만 경우에는 RRT*(RRT star) 알고리 사 여 상 동
수 는 단계 포 는 것 특징 는 지 생 .
청 3
1 에 어 , 상 동 는 단계는
상 객체 근도가 상 1 상 고 2 미만 경우에는 어도 상 객체 상
습 통 미리 단 동 단 동 스 상
단 동 가 는 단계 포 는 것 특징 는 지 생 .
청 4
3 에 어 , 상 동 는 단계는
상 가 단 동에 동 경 과 에 애 돌 생 상 단 동 수 는
단계 포 는 것 특징 지 생 .
청 5
1 에 어 , 상 지 포 결 는 단계는
상 객체에 상 지 근 상 근 도 어 는 단계
포 는 것 특징 는 지 생 .
등록특허 10-1712116
- 3 -
청 6
삭
청 7
삭
청 8
1 에 어 , 상 동 수 는 단계는
상 재생 동 경 가 애 재 지 않는 단 경 에 당 도 상 동 수
는 단계 포 는 것 특징 는 지 생 .
청 9
2 에 어 , 상 동 수 는 단계는
상 과 상 본체 돌 가능 단 여 상 RRT* 알고리 사 는 단계 포 는 것
특징 는 지 생 .
청 10
객체 검 는 객체 검 ;
상 검 객체 간 거리가 가 운 도 나타내는 객체 근도 검 여 1 상 고
2 미만 경우에는 단 동 상 동 는 동 ;
상 객체 근도가 상 2 상 경우에는 상 검 객체 객체 근 여 지 포
결 는 지 포 결 ;
상 결 지 포 에 라 상 동 수 는 동 수 포 고,
상 동 수 는
상 동 는 동안 계 상 동 경 재생 , 상 재생 동 경 상
에 애 재 는 경우 상 동 경 수 가능 단 고, 상 동 경 수 라
도 상 애 에 돌 는 경우 상 동 취 여 복귀 는 지 생 .
술 야
본 지 생 술에 것 , 보다 상 게는 애 지 에[0001]
도달 경 생 는 지 생 에 것 다.
경 술
동 처리 시스 에 차 어 사 고 , 간 동 사 여 달 수 없는 [0002]
도 가지 업 수 다. 또 , 업 경 민감 거나 험 경에 당 여 간
동 사 는 것 람직 지 않 경우 사 거나, 사람들 상 생 에 는 여러 업들 신 수
수 다.
래 술 업 수 여 지 지 가 생 수 다. [0003]
등록특허 10-1712116
- 4 -

래 술 동 계 여 샘 링 알고리 사 다. RRT(Rapidly Random Tree) 알고리
샘 링 알고리 에 당 나, 경 탐색에 복 계 는 경우
값과 동 어진 결과에 수 수 다. 러 RRT 알고리 결 여 RRT*(RRT star) 알고
리 사 수 고, RRT* 알고리 상 탐색과 재연결 업 통 값에 수 수 다.
지만, RRT 알고리 경 생 여 과도 연산량 고, 래 술 과도 연산
량에 여 생 는 수 시간 가 과 에 결 지 못 고 다.
공개특허 10-2013-0005586 는 매니퓰 그 경 생 에 것 , 업 상 체 그[0004]
리 태 여 그리 재 체 그리 고, 그리
재 체 그리 루어진 삼각 사 각 여 그리 가 동 야 는 2
차원 평 상 원 경 계산 고, 그리 재 체 그리 루어진 변
여 2차원 평 상 원 경 3차원 공간 상 경 변 매니퓰 가 체
돌 지 않고 체 수 는 단 경 동 생 여 안 업 경 수 는 매니퓰
그 경 생 에 여 개시 다.
술 헌
특허 헌
(특허 헌 0001) 공개특허 10-2013-0005586 (2013. 01. 16 공개) [0005]
내
결 는 과
본 실시 는 지 생 과 개 여 연산량 감 시키고 경 생 도 가[0006]
시키고 다.
본 실시 는 경 생 시간 고, 애 과 돌 지 여, 동 경 생[0007]
고 다.
본 실시 는 도 도 다양 업 수 수 고 객체 안 지 수 는 지[0008]
생 공 고 다.
과 결 수단
실시 들 에 , 지 생 객체 검 는 단계, 상 검 객체 객체 근도[0009]
검 여 1 상 경우에는 단 동 동 는 단계, 상 객체
근도가 2 상 경우에는 상 검 객체 객체 근 여 지 포 결 는 단계
상 결 지 포 에 라 상 동 수 는 단계 포 다.
실시 에 , 상 동 수 는 단계는 상 객체 근도가 2 미만 경우에는[0010]
RRT*(RRT star) 알고리 사 여 상 동 수 는 단계 포 수 다.
실시 에 , 상 동 는 단계는 상 객체 근도가 1 상 경우에는 [0011]
어도 상 객체 상 습 통 미리 단 동
단 동 스 상 단 동 가 는 단계 포 수 다.
실시 에 , 상 동 는 단계는 상 가 단 동에 동 경 과[0012]
에 애 돌 생 상 단 동 수 는 단계 포 수 다.
실시 에 , 상 지 포 결 는 단계는 상 객체에 상 지 근 [0013]
상 근 도 어 는 단계 포 수 다.
등록특허 10-1712116
- 5 -

실시 에 , 상 동 수 는 단계는 상 동 는 동안 계 상 [0014]
동 경 재생 는 단계 포 수 다.
실시 에 , 상 동 수 는 단계는 상 재생 동 경 상에 애 재 는[0015]
경우 상 동 경 수 가능 단 고, 상 동 경 수 라도 상 애 에 돌
는 경우 상 동 취 여 복귀 는 단계 포 수 다.
실시 에 , 상 동 수 는 단계는 상 재생 동 경 가 애 재 지 않[0016]
는 단 경 에 당 도 상 동 수 는 단계 포 수 다.
실시 에 , 상 동 수 는 단계는 상 과 상 본체 돌 가능[0017]
단 여 상 RRT* 알고리 사 는 단계 포 수 다.
실시 들 에 , 지 생 는 객체 검 는 객체 검 , 상 검 객체 객체[0018]
근도 검 여 1 상 경우에는 단 동 동 는 동
, 상 객체 근도가 2 상 경우에는 상 검 객체 객체 근 여 지 포
결 는 지 포 결 상 결 지 포 에 라 상 동 수 는 동
수 포 다.
과
본 실시 에 지 생 지 생 과 개 여 연산량 감[0019]
시키고 경 생 도 가시킬 수 다.
본 실시 에 지 생 경 생 시간 고, 애 과 돌[0020]
지 여, 동 경 생 수 다.
본 실시 에 지 생 도 도 다양 업 수 수 고[0021]
객체 안 지 수 는 지 생 공 수 다.
도 간단
도 1 본 실시 에 지 생 는 도 다.[0022]
도 2는 도 1에 는 지 생 내 는 블 도 다.
도 3 도 1에 는 지 생 에 수 는 RRT* 알고리 경 생 과 는 도 다.
도 4는 도 1에 는 지 생 에 수 는 RRT* 알고리 경 수 과 는 도 다.
도 5는 도 1에 는 지 생 에 여 수 는 지 생 과 는 도 다.
실시 체 내
본 에 내지 능 실시 에 과 므 , 본 리 는 본 에 [0023]
실시 에 여 는 것 어 는 아니 다. , 실시 는 다양 변경 가능 고 여러 가
지 태 가질 수 므 본 리 는 술 사상 실 수 는 균등 들 포 는 것
어야 다. 또 , 본 에 시 또는 과는 특 실시 가 포 여야 다거나
그러 과만 포 여야 다는 미는 아니므 , 본 리 는 에 여 는 것
어 는 아니 것 다.
편, 본 원에 술 는 어 미는 다 과 같 어야 것 다.[0024]
" 1", " 2" 등 어는 나 다 별 것 , 들 어들에 [0025]
리 가 어 는 아니 다. 들어, 1 는 2 수 고, 사 게 2
도 1 수 다.
어 가 다 에 "연결 어" 다고 언 에는, 그 다 에 직 연결 수[0026]
등록특허 10-1712116
- 6 -
도 지만, 간에 다 가 재 수도 다고 어야 것 다. 에, 어 가 다
에 "직 연결 어" 다고 언 에는 간에 다 가 재 지 않는 것 어야
것 다. 편, 들 간 계 는 다 들, "~사 에" " ~사 에" 또는 "~에 웃
는"과 "~에 직 웃 는" 등도 마찬가지 어야 다.
단수 맥상 게 다 게 뜻 지 않는 복수 포 는 것 어야 고, "포[0027]
다"또는 "가지다" 등 어는 실시 특징, 숫 , 단계, 동 , , 또는 들 것
재 지 는 것 , 나 또는 그 상 다 특징 나 숫 , 단계, 동 , , 또는
들 것들 재 또는 가 가능 미리 지 않는 것 어야 다.
각 단계들에 어 식별 ( 들어, a, b, c 등)는 편 여 사 는 것 식별 는 각 단[0028]
계들 순 는 것 아니 , 각 단계들 맥상 게 특 순 재 지 않는 상 순
다 게 어날 수 다. , 각 단계들 순 동 게 어날 수도 고 실질 동시에 수
수도 순 수 수도 다.
본 컴퓨 가 수 는 매체에 컴퓨 가 수 는 드 수 고, 컴퓨 가 [0029]
수 는 매체는 컴퓨 시스 에 여 질 수 는 가 는 든 포
다. 컴퓨 가 수 는 매체 는 ROM, RAM, CD-ROM, , 스크,
등 , 또 , 리어 웨 브( 들어 통 ) 태 는 것도
포 다. 또 , 컴퓨 가 수 는 매체는 트워크 연결 컴퓨 시스 에 산 어, 산 식
컴퓨 가 수 는 드가 고 실 수 다.
여 사 는 든 어들 다 게 지 않는 , 본 는 야에 통상 지식 가진 에[0030]
는 것과 동 미 가진다. 사 는 사 에 어 는 어들
술 맥상 가지는 미 는 것 어야 , 본 원에 게 지 않는
상 거나 과도 게 식 미 지니는 것 수 없다.
도 1 본 실시 에 지 생 는 도 고, 도 2는 도 1에 는[0031]
지 생 내 는 블 도 다.
도 1 도 2 참 , 지 생 (100)는 객체 검 (110), 동 (120),[0032]
지 포 결 (130), 동 (140) 어 (150) 포 다.
지 생 (100)는 (10)에 내 어 (10) 어 거나, 에 원격 [0033]
(10) 어 수 다.
객체 검 (110)는 지 상 는 객체(20) 검 수 다. 객체 검 (110)는 객체(20) 검 여[0034]
(10)과 객체(20) 간 객체 근도 검 수 다. 지 생 (100)는 객체 검 도
(10) 지 생 과 결 수 다. 여 에 , (10) 업 상에
리 공 수 다. (10) 들( 들어, 복수 들) 들 연결 는 들
포 고, 운동 가지는 다 식 업 도 수 다. 객체 검 (110)는 (10)
복수 들 통 들 각 수 다. 또 , 객체 검 (110)는 (10) 들
각 통 복수 들 수 다. 객체 검 (110)는 (10)에 변 에 여
변경 는 객체 근도 갱신 수 다.
동 (120)는 객체 근도가 1 상 경우에는 단 동 (10) 동 [0035]
수 다. 보다 체 , 동 (120)는 객체 근도가 1 상 경우에는 어
도 (10) 객체(20) 습 통 미리 (10) 단 동
단 동 스 단 동 가 수 다. 여 에 , 단 동 계 에 여 단
동 스에 거나, (10) 단 동 습 여 단 동 스에 수
다. 단 동 (10) 동 경 알고리 수 없 (10) 객
체(20) (10) 동 경 결 수 다. (10) 단 동에 여 동
는 경우, 지 생 (100) 연산량 감 시키고 동 도 가시킬 수 다.
실시 에 , 동 (120)는 단 동 스 가 단 동에 동 경 [0036]
등록특허 10-1712116
- 7 -
과 에 애 (30) 돌 생 단 동 수 수 다. 동 (120)는 단 동에
(10) 동 에 애 (30) 재 여 단 수 다. 동 (120)는
(10) 객체(20) 택 단 동에 여 애 (30)과 돌 가능 ,
단 동 스 다 단 동 가 수 다. , 동 (120)는 택 단
동에 여 애 (30)과 돌 여 단 고, 애 (30)과 돌 가능 없는 경우 (10)
동 수 다.
지 포 결 (130)는 객체 근도가 2 상 경우에는 검 객체(20) 객체 근 [0037]
여 지 포 결 수 다. 여 에 , 2 에 객체는 1 에 객체보다 가
어 다고 가 다. 보다 체 , 지 포 결 (130))는 (10) 지
(10) 객체(20)에 근 비 수 다. 지 포 결 (130)는 (10) 지 상태에
(10) 지 근 도 지 포 결 수 다. 편, (10) 동
는 상태에 는 (10) 지 근 계 변경 수 고, 지 포 결 (130)는 변
경 는 지 근 지 포 결 수 다.
실시 에 , 지 포 결 (130)는 애 (30) 재 여 에 라 지 포 결 수 다. 지 포[0038]
결 (130)는 (10) 동 는 동안 애 (30)과 돌 지 수 는 지 포 결 수
다. 들어, 지 포 변경 (10) 동 는 과 에 애 (30)과 돌 수
는 경우, 지 포 결 (130)는 지 포 변경 여 (10) 동 경 라 동 도
수 다.
실시 에 , 지 포 결 (130)는 객체(20)에 (10) 지 근 [0039]
(10) 근 도 어 수 다. 보다 체 , 지 포 결 (130)는 (10) 동 는
동안 지 근 검 수 다. 들어, 결 지 포 라 (10) 지 포
변경 는 시간 (10) 객체 도달 시간보다 짧 경우, 지 포 결 (130)는 (10)
근 도 감 시 지 포 변경 시간 보 수 다. 편, 지 포 변경 는 시간 (1
0) 객체 도달 시간보다 짧 경우, 지 포 결 (130)는 (10) 근 도 가시
(10) 동 시간 단 시킬 수 다.
동 수 (140)는 결 지 포 에 라 (10) 동 수 수 다. 보다 체[0040]
, 동 수 (140)는 객체 근도가 2 미만 경우에는 RRT*(Rapidly-exploring Random Tree
star) 알고리 사 여 (10) 동 수 수 다. 여 에 , RRT* 알고리 새 운
경에 (10)에 경 생 수 는 알고리 에 당 수 다. , RRT* 알고리 상
탐색( 들어, 상 상태 변수 탐색)과 재연결 업( 들어, 경 재연결)
통 값에 수 수 는 알고리 미 다.
실시 에 , 동 수 (140)는 RRT* 알고리 (또는, RRT 경 생 알고리 ) 사 여 상[0041]
태 변수 고, 경 거리 비 수 계산 수 다. , RRT* 알고리 (10) 동
여 상태 변수, 경 거리 비 수 다. 여 에 , 상태 변수는
수 고, 동 수 (140)는 상태 변수 (10) 동 경 수 다.
(10) 지 생 (100)에 여 객체(20) 여 동 수 고, 동 수 (140)
는 수시 변 는 (10) 상태 변수 수 다.
실시 에 , 동 수 (140)는 상태 변수 (10) 객체(20) [0042]
여 동 경 수 다. 동 경 는 복수 상태 변수들 어 수 고, 동
수 (140)는 각각 동 경 들 마다 비 수 계산 수 다. 여 에 , 비 수는 (10)
동 경 라 동 여 객체(20)에 도달 는 비 미 다. , 비 수가 크 (1
0) 동 경 가 고 (10)에 가 지는 운동 에 지가 가 는 것 미 고, 비 수가
(10) 동 경 가 짧고 (10)에 가 지는 운동 에 지가 감 는 것 미 다. 라 ,
동 경 는 비 수가 동 경 에 당 수 다. , RRT* 알고리 에 동 경 과
도 3 도 4에 다.
실시 에 , 동 수 (140)는 (10) 동 는 동안 계 (10) 동 경 재[0043]
생 수 다. 보다 체 , (10) 동 (10) 객체(20) 상 가 변 고
애 (30) 재 여 도 변경 수 에, 동 수 (140)는 각각 에 마다 상태
등록특허 10-1712116
- 8 -
변수 고, 경 거리 비 수 계산 는 과 복 수 다. 라 , (10) 동
는 동안 (10) 동 경 는 수시 갱신 수 다.
실시 에 , 동 수 (140)는 재생 동 경 상에 애 (30) 재 는 경우 (10)[0044]
동 경 수 가능 단 고, 동 경 수 라도 (10) 애 (30)에 돌 는 경우
(10) 동 취 여 복귀 수 다. 보다 체 , (10) 미 동 료 에
RRT* 알고리 에 여 생 어 동 경 에 라도 애 (30)과 돌 수 없는 경우,
동 수 (140)는 (10) 동 취 여 (10) 복쉬시킬 수 다. 동 수
(140)는 검 애 (30) 취 동 경 다 동 경 재생 수 다.
실시 에 , 동 수 (140)는 재생 동 경 가 애 (30) 재 지 않는 단 경 에 당[0045]
도 (10) 동 수 수 다. 동 수 (140)는 (10) 애 과 돌 지
않는 동 경 공 수 고, 여 에 동 경 는 RRT* 알고리 에 비 수
가지는 동 경 미 다. , 지 생 (100)는 동 경 공 여 움직
지 고 (10) 객체 근 시간 단 시킬 수 다.
실시 에 , 동 수 (140)는 (10)과 본체 돌 가능 단 여 RRT* 알고리[0046]
사 수 다. 동 수 (140)는 본체 검 여 (10)과 본체 돌 가능
단 수 다. (10) 동 경 라 동 는 동안 본체 돌 는 경우,
동 수 (140)는 RRT* 알고리 사 여 동 경 재생 수 다.
어 (150)는 지 생 (100) 체 동 어 고, 객체 검 (110), 동 [0047]
(120), 지 포 결 (130) 동 수 (140) 간 어 또는 어 수 다.
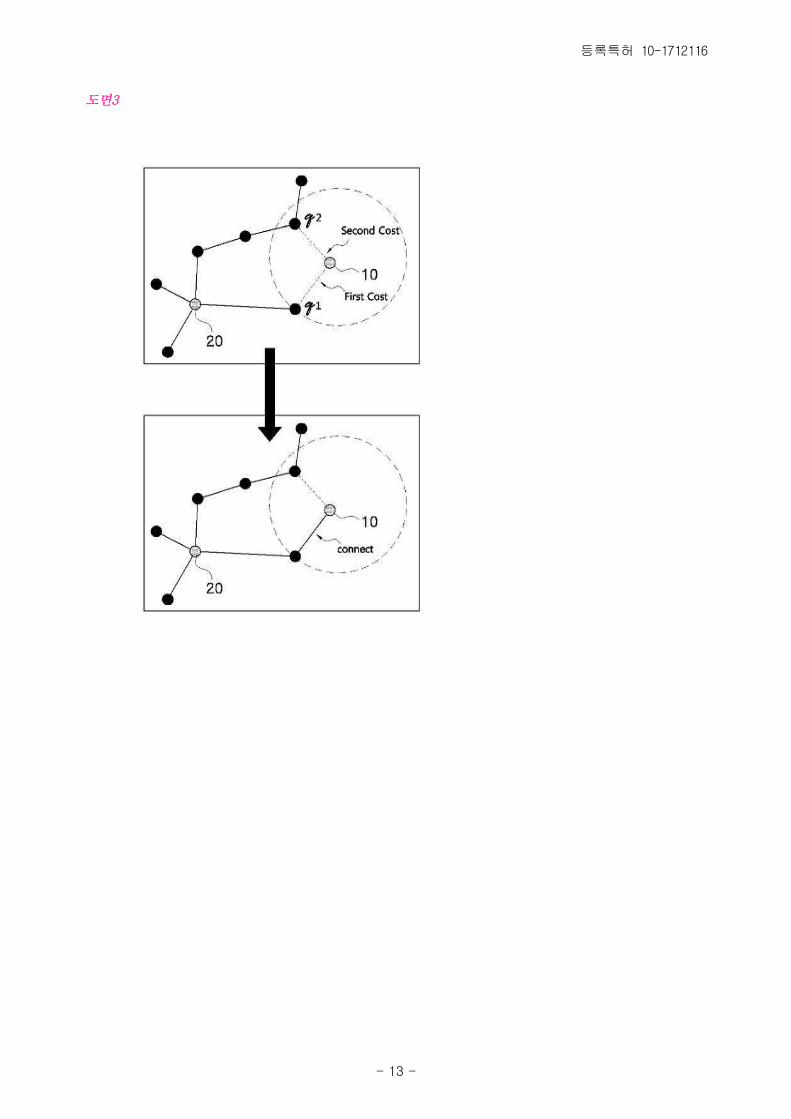
도 3 도 1에 는 지 생 에 수 는 RRT* 알고리 경 생 과 는 도 다.[0048]
도 3 참 , 동 수 (140)는 (10) 복수 상태 변수들 수 [0049]
다. 동 수 (140)는 (10) 가 게 어도 나 상태 변수(q1, q2) 거 는
동 경 (connect) 수 다. 동 경 는 복수 상태 변수들 어 수 고, 동
수 (140)는 각각 동 경 마다 비 수 계산 수 다.
실시 에 , 동 수 (140)는 비 수 는 동 경 택 여 동 경 [0050]
택 수 다. 여 에 , 1 상태 변수(q1) 포 는 1 동 경 에 비 수 1 비 수, 2
상태 변수(q2) 포 는 2 동 경 에 비 수 2 비 수 가 는 경우, 동 수
(140)는 1 2 비 수들 비 여 값 가진 비 수 택 수 다. 들어, 1
비 수가 2 비 수보다 경우 동 수 (140)는 1 상태 변수 동 경 에 포 시킬 수
다. 결과 , 동 수 (140)는 1 동 경 택 수 고, (10) 1 동 경
라 동 수 다. 동 수 (140)는 (10) 가 게 복수 상태 변수들(q1,
q2) 나(q1) 택 는 과 복 여 (10) 지 생 수 다.
도 4는 도 1에 는 지 생 에 수 는 RRT* 알고리 경 수 과 는 도 다.[0051]
도 4 참 , 동 수 (140)는 (10) 복수 상태 변수들 수 [0052]
다. 동 수 (140)는 동 경 차후 가능 는 동 경 에 여 비
수 계산 수 다.
실시 에 , 동 수 (140)는 동 경 보다 비 수가 동 경 검 는 경[0053]
우, 동 경 취 (disconnect) 고 새 운 동 경 택(connect) 수 다. 동 수
(140)는 (10) 가 게 어도 나 상태 변수(q1, q2) 포 는 동 경 들에
여 비 수 각각 계산 수 다. 여 에 , (10) 1 상태 변수(q1) 포 는 1
동 경 에 비 수 1 비 수, (10) 포 지 않고 2 상태 변수(q2) 포
는 2 동 경 에 비 수 2 비 수 가 는 경우, 동 수 (140)는 1 2
비 수들 비 여 값 가진 비 수 택 수 다. 들어, 1 비 수가 2 비
수보다 경우 동 수 (140)는 1 동 경 에 라 (10) 동 경 에 포 시
등록특허 10-1712116
- 9 -
킬 수 다. 결과 , (10) 1 동 경 라 동 수 다.
도 5는 도 1에 는 지 생 에 여 수 는 지 생 과 는 도 다.[0054]
객체 검 (110)는 객체(20) 검 여 객체(20) 객체 근도 검 수 다(단계 S510).[0055]
동 (120)는 객체 근도가 1 상 경우(단계 S520), (10) 객체(20)[0056]
단 동 스 단 동 가 수 다(단계 S530). 단 동 단 동
스에 사 에 여 거나 습 통 미리 수 다.
지 포 결 (130)는 객체 근도가 2 상 경우(단계 S540), 검 객체(20) 객체 근 [0057]
여 지 포 결 수 다(단계 S550).
동 수 (140)는 객체 근도가 2 미만 경우에는 RRT*(RRT star) 알고리 사 여 [0058]
(10) 동 수 수 다(단계 S560).
지 생 (100)는 지 ( (10) 동 경 지 포 ) 생 과 개[0059]
여 연산량 감 시키고 경 생 도 가시킬 수 다. 지 생 (100)는 경 생
시간 고, 애 과 돌 지 여, 동 경 생 수 다. 또 , 지 생
(100)는 도 도 다양 업 수 수 고 객체 안 지 수 다.
상 에 는 본 원 람직 실시 참 여 지만, 당 술 야 숙 통상 술 는 [0060]
특허 청 에 재 본 사상 역 어나지 않는 내에 본 원 다양
게 수 변경시킬 수 수 것 다.
100: 지 생 [0061]
110: 객체 검 120: 동
130: 지 포 결 140: 동 수
10: 20: 객체
30: 애
등록특허 10-1712116
- 10 -

도
도 1
등록특허 10-1712116
- 11 -

도 2
등록특허 10-1712116
- 12 -
도 3
등록특허 10-1712116
- 13 -

도 4
등록특허 10-1712116
- 14 -

도 5
등록특허 10-1712116
- 15 -