1 workshop on toda, lotka-volterra and related systems larnaca, cyprus october 2014 poisson...
TRANSCRIPT

1
Workshop on Toda, Lotka-Volterra and related systems
Larnaca, CyprusOctober 2014
POISSON STRUCTURES FOR LOTKA-VOLTERRA SYSTEMS AND THEIR QUASI-POLYNOMIAL
GENERALIZATIONS
Benito Hernández Bermejo
Departamento de CienciasUniversidad Rey Juan Carlos

2
Hamiltonian systems
They are of great applied importance:
• Diversity of application domains in applied mathematics, physics and engineering.
• Plethora of methods and tools specifically adapted to them.• Naturally associated with energy-preserving systems.
Formally:
Or also, in symplectic notation:

3
Practical insufficiency of Hamiltonian systems
Precisely because of their relevance and usefulness, Hamiltonian systems can be regarded as insufficient, in the sense that it would be interesting to extend their advantages to more general kinds of systems.
Main limitations of Hamiltonian systems:
• Even dimension.• Formally restrictive:
• There are conservative systems that are not Hamiltonian.• This can be found also for odd dimensions.
• Canonical transformations are also strongly restrictive.
It would be of a great interest to have suitable generalizations:
• Arbitrary dimension.• More general from a formal viewpoint:
• Associated with the wider idea of conservative system.• Comprising Hamiltonian systems as a particular case.
• With less restrictive canonical transformations.• But retaining a dynamical equivalence with Hamiltonian systems.
Such a generalization exists: POISSON SYSTEMS

4
Poisson structures and systems
A general Poisson bracket on a smooth manifold is defined as an operation on every pair of smooth functions defined on the manifold, such that the bracket assigns to such pair another smooth function, according to the following properties:
• Skew-symmetry:
• Bilinearity:
• Leibnitz’ rule:
• Jacobi identity:

5
For instance, the canonical Poisson bracket of Hamiltonian systems verifies all these properties.
A Poisson manifold is the one obtained by endowing a smooth manifold with a Poisson bracket, which defines a Poisson structure on the manifold.
This approach is general, and it does not imply dimensional limitations. By means of Lie group techniques, it is possible to demonstrate that in a coordinate system the Poisson brackets have the following general form:
The fundamental Poisson brackets are termed structure functions:
These are grouped in the structure matrix, and accordingly we can write:

6
At the same time, it can be demonstrated that every smooth function H(x) induces a vector field on the manifold, which is going to have the form:
These are known as Poisson systems. In a more compact form:
The Hamiltonian is by construction a first integral. In addition, the two necessary and sufficient conditions in order to have a structure matrix are:
Skew-symmetry:
Jacobi PDEs:

7
Poisson systems provide a double generalization of classical Hamiltonian systems:
Formal generalization:
• They embrace Hamiltonian systems as a particular case.
• Every constant skew-symemtric matrix is a solution of the Jacobi equations.
• At the same time, they are not limited to even dimensions: n is arbitrary.
• They comprise a greater variety of systems, through the structure matrix.
• They also comprise many conservative systems (that are not Hamiltonian) well-known in the literature, including odd-dimensional cases.
• No previous limitations exist for canonical transformations: now every transformation is “canonical” (namely, it preserves the Poisson format).
Dynamic generalization:
• Darboux’ Theorem: In a domain of constant rank of the structure matrix, every Poisson system is locally equivalent to a classical Hamiltonian system on the level sets of the Casimir invariants, which are the solutions of the PDEs:

8
The existence of Casimir invariants induces a foliation in phase space, which is known as the symplectic foliation.
Given that the rank r of a skew-symmetric matrix is always even, the leaves of the symplectic foliation are even-dimensional (of dimension r).
Essentially, constructing the Darboux canonical form consists of locally decoupling (in the neighborhood of a point) the l = n – r independent Casimir invariants in order to reduce the system to a classical Hamiltonian one.
The practical determination tends to be involved if carried out globally, and perhaps this reason accounts for the scarcity of examples in the literature.

9
The Jacobi PDEs
We shall now focus on the Jacobi equations for structure matrices:
Very different approaches have been developed for their study. Roughly speaking:
Recall that for n = 2 every skew-symmetric matrix is a solution.
Evolution towards solutions of increasing dimension, starting with n = 3. Specially n = 3, but also frequent n = 4, 5, 6..., and some with general n.
Recall also that every constant skew-symmetric matrix is a solution:
Evolution towards solutions of increasing nonlinearity: linear, affine-linear, quadratic, cubic, ... , up to solutions containing arbitrary
nonlinearities.
At the same time, the number of solutions analyzed, in special globally (Casimir invariants, Darboux canonical form) has been very limited.
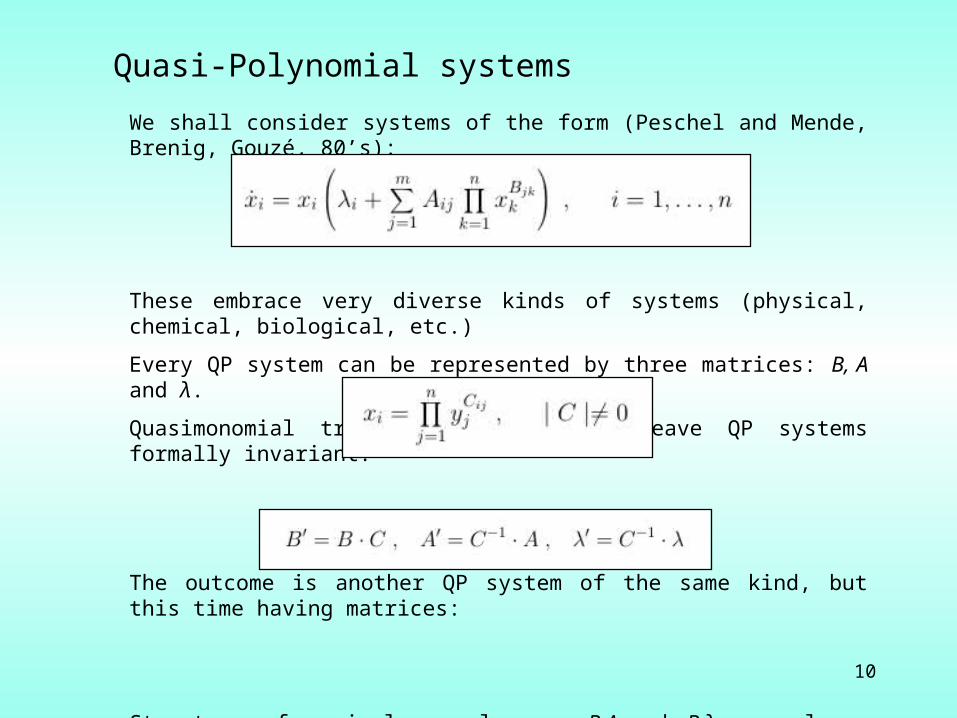
10
We shall consider systems of the form (Peschel and Mende, Brenig, Gouzé, 80’s):
These embrace very diverse kinds of systems (physical, chemical, biological, etc.)
Every QP system can be represented by three matrices: B, A and λ.
Quasimonomial transformations (QMTs) leave QP systems formally invariant:
The outcome is another QP system of the same kind, but this time having matrices:
Structure of equivalence classes: B·A and B·λ are class-invariants that determine the class.
Quasi-Polynomial systems

11
Thus QP systems are nonlinear but can be manipulated in terms of linear algebra operations while preserving topological equivalence.
Many different properties developed for them, we only cite a few of interest for what follows:
QP systems embrace all those of interest in practice.
When the composite matrix M ≡ ( λ | A ) has nonmaximal rank, there are first integrals of quasimonial form (a monomial of real exponents). Then the system can be reduced to a QP one of lower dimension through a QMT.
There are canonical forms for special matrices: for instance, when m = n and B = I is the identity matrix, we have Lotka-Volterra systems:
In fact, a Lotka-Volterra canonical representative can be always constructed for every m ≥ n.
GOAL: DEVELOPMENT OF A FAMILY OF QP POISSON SYSTEMS ON WHICH THE QP METHODOLOGY CAN BE APPLIED TO THE POISSON STRUCTURE.

12
Consider now a QP system with m ≥ n and Rank(B) = n, and such that:
where K is n×n and skew-symmetric, L is n×1 and D is m×m diagonal and invertible. Then the system has the following first integral:
In addition, the system is Poisson with structure matrix:
Moreover, this Poisson structure is QP-invariant: after a QMT of matrix C, we arrive to another Poisson system of the same form and matrices:
In particular the Hamiltonian, the structure matrix and the Poisson bracket are formally invariant under QMTs.
Quasi-Polynomial Poisson systems

13
A complete set of Casimir invariants is determined by a basis of Ker{K}:
Moreover, every QM first integral of the system is a Casimir invariant.
In fact, it is Rank(M) = Rank(A) = Rank (K) = Rank (J) inside the positive orthant.
Every QP Poisson system can be reduced to Darboux canonical form globally in the positive orthant by means of one QMT followed by a log transformation.
Moreover, if matrix D is positive definite or negative definite, every steady state in the positive orthant is stable, and there exists for it a Lyapunov (energy-Casimir) function of the form:
This is a wide generalization of the classical results for conservative LV systems.
Thus the QP formalism and the Poisson structure run in parallel, and the QP tools are naturally implemented in the Poisson framework in order to find global results.

14
EXAMPLE: 3-D LOTKA-VOLTERRA POISSON SYSTEM
Consider the following Lotka-Volterra system:
According to Nutku (1990) the system is Poisson provided the parameter conditions:
Then, the structure matrix and Hamiltonian are:

15
In fact, this is a QP Poisson system:
Rank(M) = Rank(A) = Rank (K) = Rank (J) = 2, implies a single independent Casimir:
The reduction to the Darboux form makes use of a log transformation plus a single QMT, leading globally to a Poisson system of the form:
These Hamiltonians resemble those in Toda theory…

16
EXAMPLE: GENERALIZED 2-D LOTKA-VOLTERRA SYSTEM
Now consider the classical Lotka-Volterra predator-prey system:
This system is well-known to be Poisson, and actually it is QP Poisson with:
The Darboux canonical form can be easily constructed within the frame of the theory.
It is well-known also that this system has a stable center in the positive orthant.

17
Keeping intact the Poisson structure (Poisson brackets and structure matrix) we could try to generalize the system for more general degrees of nonlinearity:
If we do this, the result is another QP Poisson system, this time with more general nonlinear exponents:
A natural question is if the topology has been preserved, namely if the generalization maintains a stable center. Using the energy-Casimir method above, it can be seen that this is indeed the case under very general conditions:
Thus the initial 2d LV system can be broadly generalized while preserving its more relevant and biologically important dynamical features, as well as the Poisson structure and the QP format.

18
Conclusions and perspectives of this research
Main conclusions:
Poisson systems are a very natural generalization of classical Hamiltonian systems both from a theoretic as well as applied perspective.
Quasi-Polynomial vector fields embrace all systems of practical interest and have a very elegant formalism associated, based on linear algebraic
tools.
Quasi-Polynomial Poisson systems constitute an interesting category of flows that combine the advantages of both:
Operational advantages of Poisson systems.
Operational advantages of QP formalism.
Poisson properties take place as QP properties, and vice-versa.
Lead to global and analytical results (Darboux form, energy-Casimir).
Embrace systems of applied interest, such as Lotka-Volterra models.
Provide generalizations of known systems of applied interest.

19
Thank you!