1 reactive systems yolanda gil cs 541, fall 2003 (thanks to karen myers from sri international)
TRANSCRIPT
1
Reactive Systems
Yolanda Gil
CS 541, Fall 2003
(Thanks to Karen Myers from SRI International)
2
The problem with plans (I)
Attack Goliath1. Gather pile of rocks
2. Grasp slingshot
3. Fire at giant
4. Hit on the head
3
The problem with plans (II)
Attack Goliath1. Gather pile of rocks
2. Grasp slingshot
3. Fire at giant
4. Hit on the head
• Unknown how many stones
• Unknown if stones
• Unknown how many attempts
• Conditions for termination
• What if failure
• Check state
4
Reactive Systems• Embedded in the real world• Have sensors and effectors• Actively test the external environment• Need to respond to events in dynamic
environments• Failure may require aborting and generating
new response• Do we need deliberate reasoning (planning)?
5
Outline and Informal Roadmap
• Control systems– Networks of “variables” (arcs) and “functions” (nodes)
• Reactive Action Packages (RAPs)– Networks of “conditions” and “tasks”
• Task Control Architecture (TCA)– Network arranged according to “vertical capabilities”
• Procedural Reasoning System (PRS)– Integrates planning, BDI, and reactive techniques
• Anytime algorithms– When time is short, managing what you think about
• Other approaches and issues
6
Readings
• RAP (http://people.cs.uchicago.edu/~firby/raps)
– Firby, J “Task Networks for Controlling Continuous Processes”, Proceedings of Artificial Intelligence Planning conference, 1994.
• TCA (http://www-2.cs.cmu.edu/afs/cs/project/TCA/release/tca.orig.html, http://www-2.cs.cmu.edu/afs/cs/project/TCA/release/tca.html)
– Simmons, R. “Structured Control for Autonomous Robots”, IEEE Transactions on Robotics and Automation, Feb 1994.
• PRS (http://www.ai.sri.com/~prs)
– Reactive reasoning and planning: an experiment with a mobile robot, M. Georgeff and A. Lansky, in Proceedings of AAAI, 1987.
• Anytime algorithms– Zilberstein, S. “Using Anytime Algorithms in Intelligent
Systems”, AI Magazine, 1996.
7
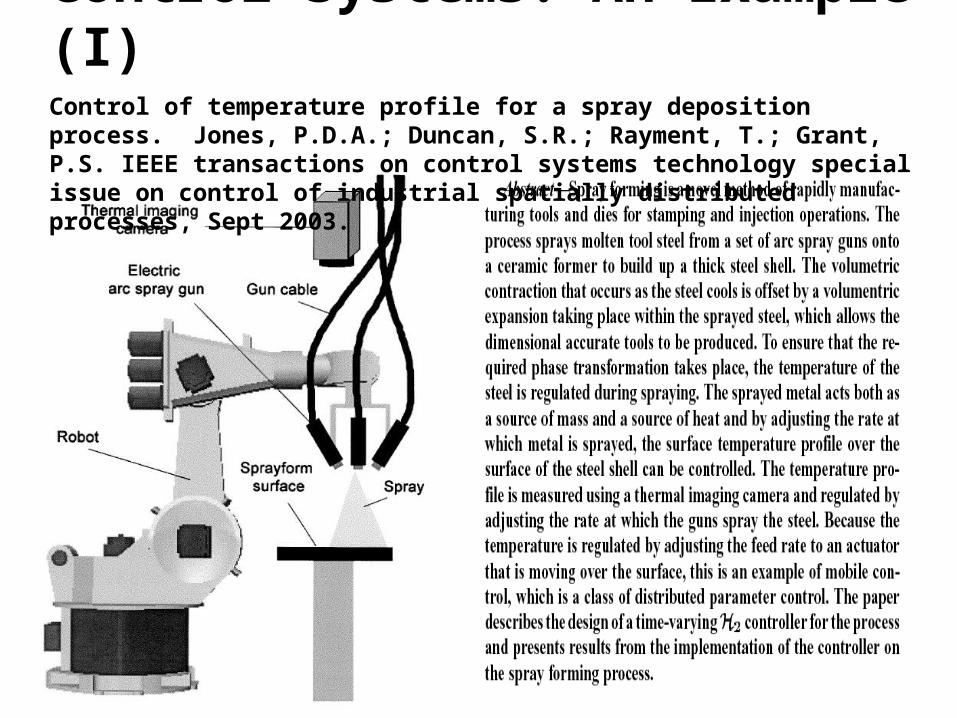
Control Systems: An Example (I)Control of temperature profile for a spray deposition process. Jones, P.D.A.; Duncan, S.R.; Rayment, T.; Grant, P.S. IEEE transactions on control systems technology special issue on control of industrial spatially distributed processes, Sept 2003.
8
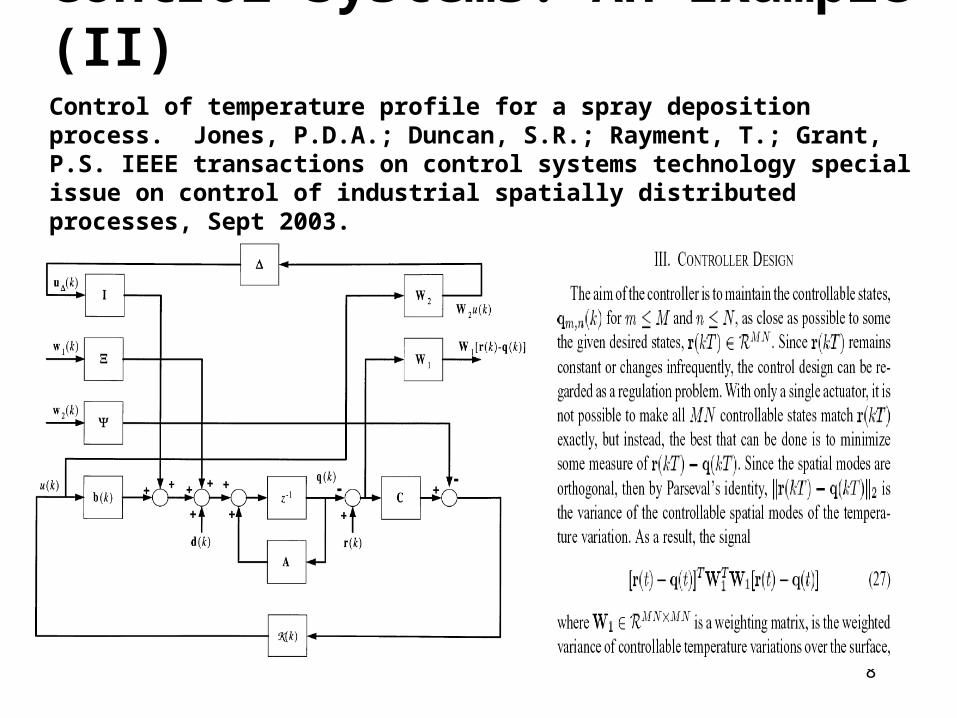
Control Systems: An Example (II)Control of temperature profile for a spray deposition process. Jones, P.D.A.; Duncan, S.R.; Rayment, T.; Grant, P.S. IEEE transactions on control systems technology special issue on control of industrial spatially distributed processes, Sept 2003.
9
Beyond Stimulus-Response
• Address problems that require a combination of:
– Coordinated activity to accomplish tasks
– Reactivity to world dynamics
• Situate control decisions within an explicit, persistent decision-making framework

10
Reactive Action Packages (RAP)
11
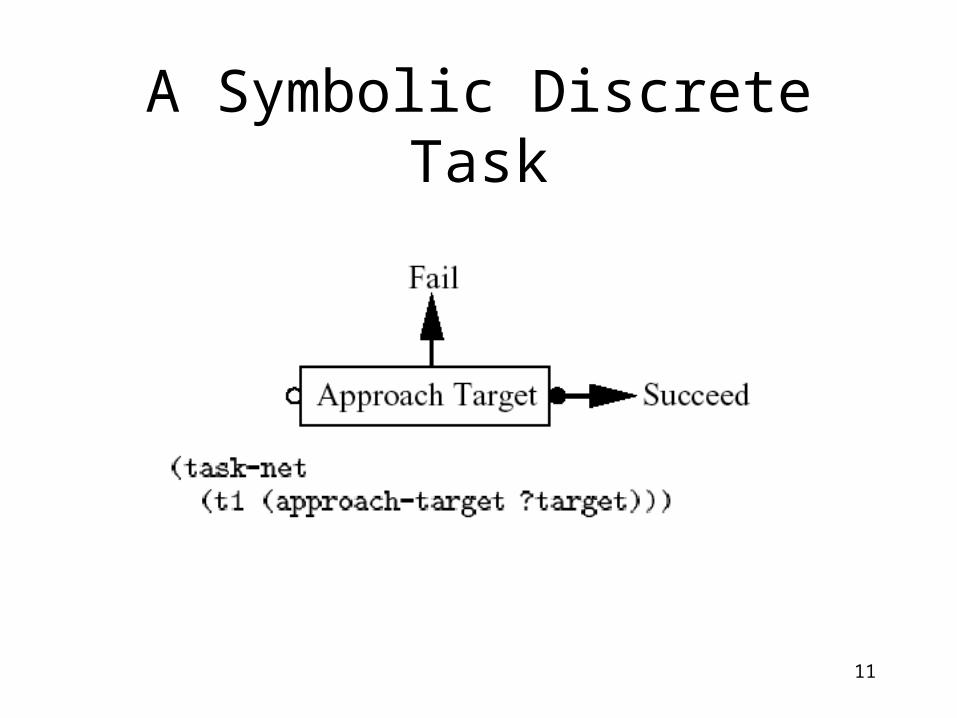
A Symbolic Discrete Task
12
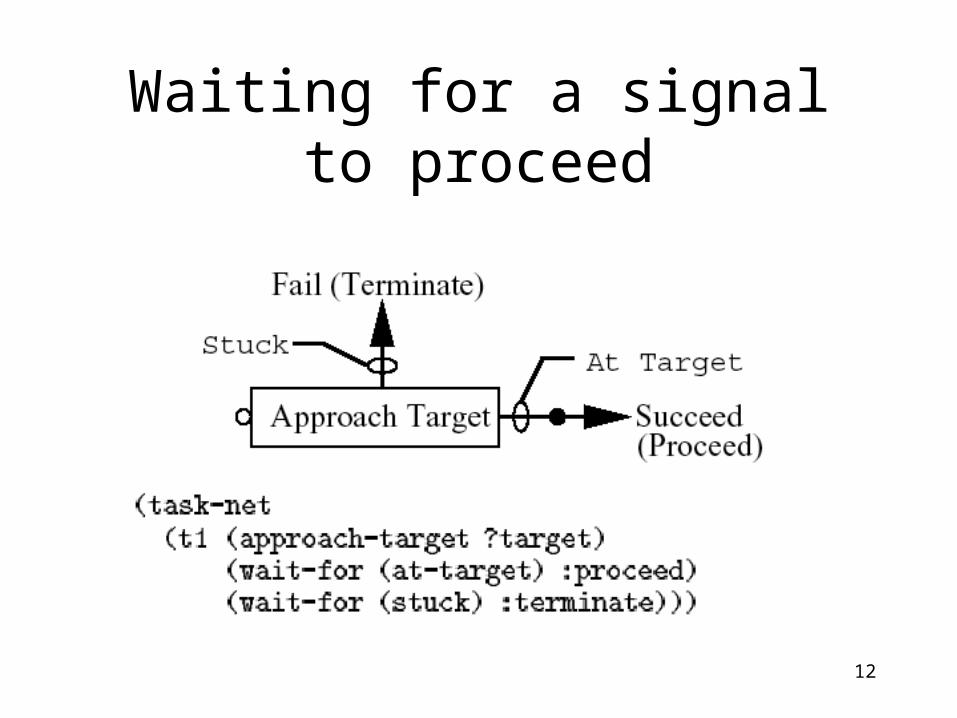
Waiting for a signal to proceed
13
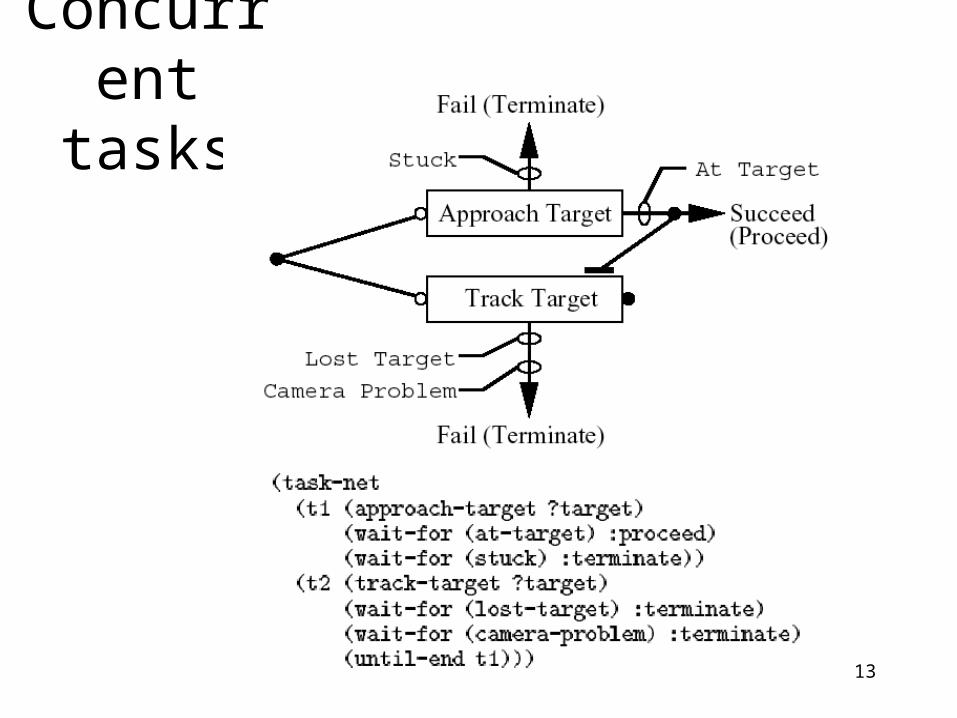
Concurrent tasks

14
More Complex Task Networks
15
Task Control Architecture (TCA)
• Vertical task decomposition: several task-specific modules communicate through a central control module
• Deliberation: top-down task-subtask, resolve constraints
• Central control routes messages– Inform, query, command, monitor

16
Ambler Walking Robot
17
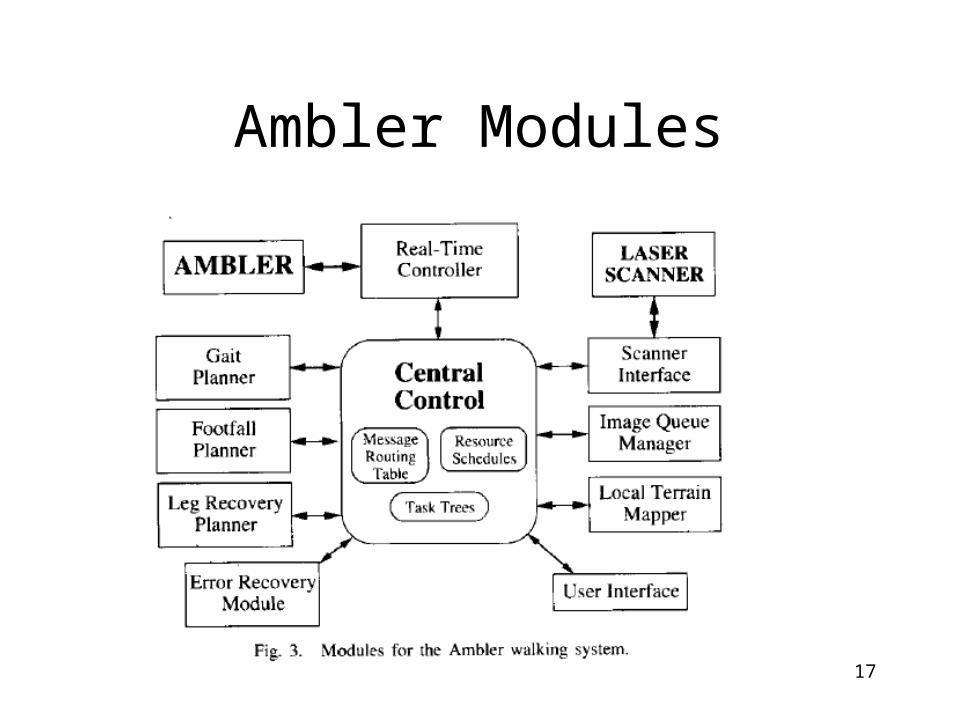
Ambler Modules
18
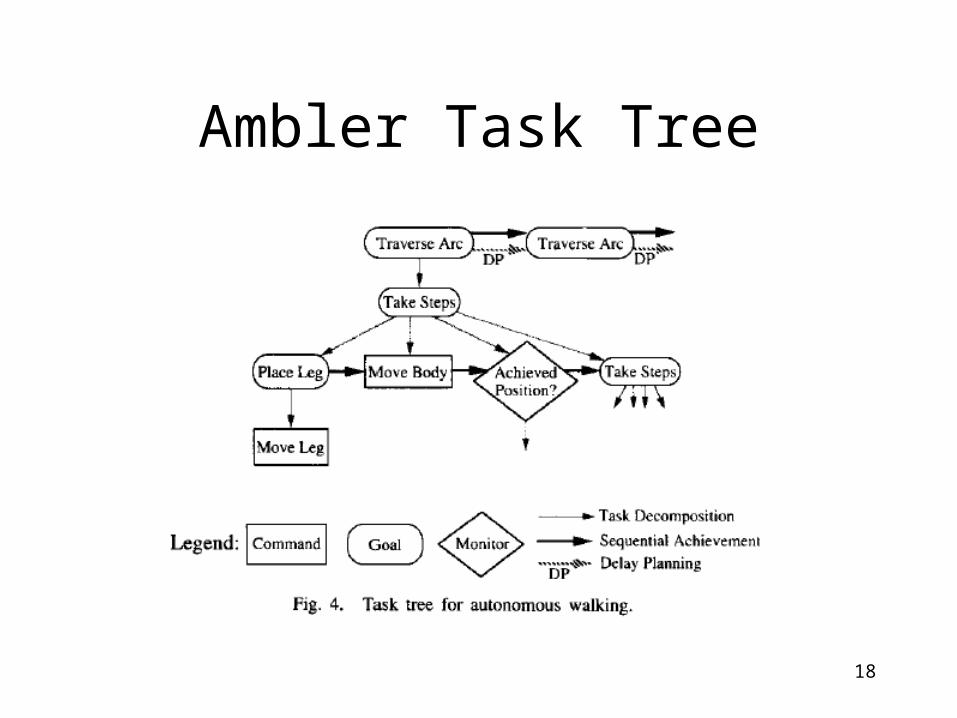
Ambler Task Tree
19
TCA: Monitoring
• Central control traverses tree and handles messages: – asks gait planner to traverse arc, – gait planner asks terrain mapper for elevation
map in order to take steps– Gait planner asks leg recovery planner to place
leg, move leg, move body,– Gait planner activates monitor whether
achieved position

20
TCA: Control
• Ordering and temporal constraints• Delay planning constraint: goal cannot be issued
until previous task achieved– Can do place leg planning while monitoring achieve
position
• Exception handling: error recovery modules examine and modify task trees– Eg: if position not achieved, add take steps subtask
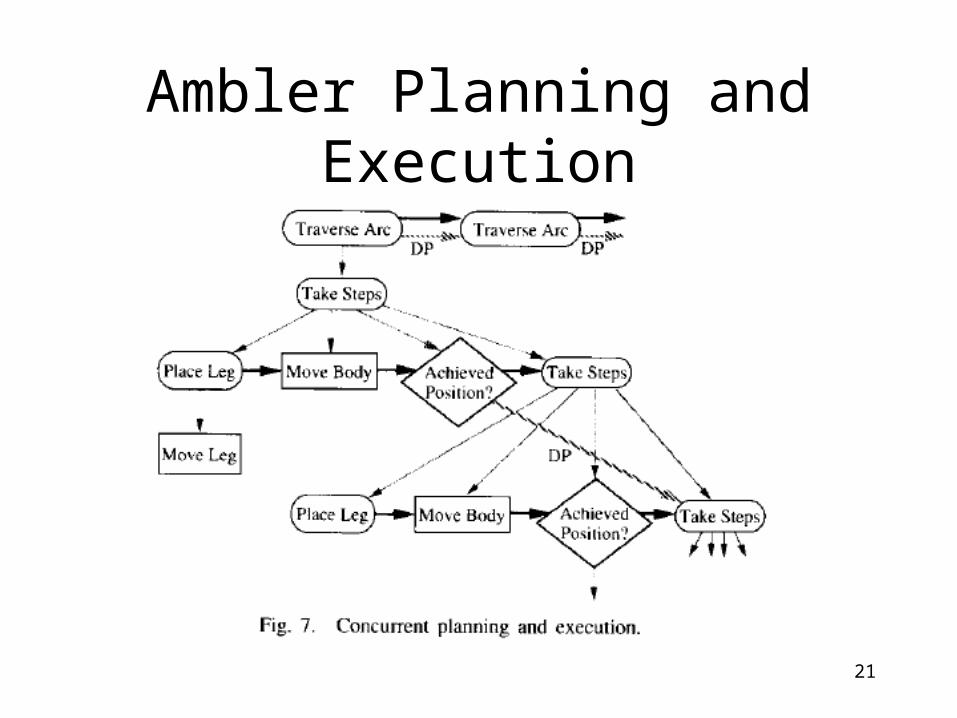
21
Ambler Planning and Execution
22
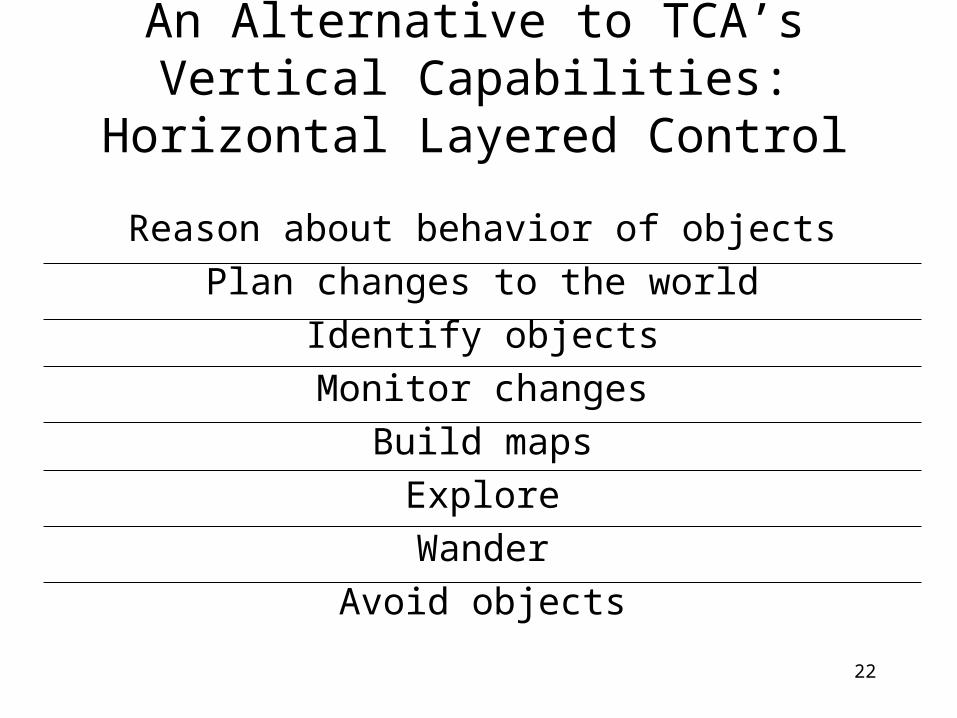
An Alternative to TCA’s Vertical Capabilities:Horizontal Layered Control
Reason about behavior of objects
Plan changes to the world
Identify objects
Monitor changes
Build maps
Explore
Wander
Avoid objects

23
Procedural Reasoning System (PRS)
• Framework for symbolic reactive control systems in dynamic environments– Eg Mobile robot control– Eg diagnosis of the Space Shuttle’s Reaction
Controls System
24
PRS: Main Features
• Pre-compiled procedural knowledge• BDI (Belief, Desires, Intentions) foundation• Combines deliberative and reactive features
– Plan selection, formation, execution, sensing
• Plans dynamically and incrementally• Integrates goal-directed and event-driven behavior• Can interrupt plan execution• Meta-level reasoning• Multi-agent planning
25
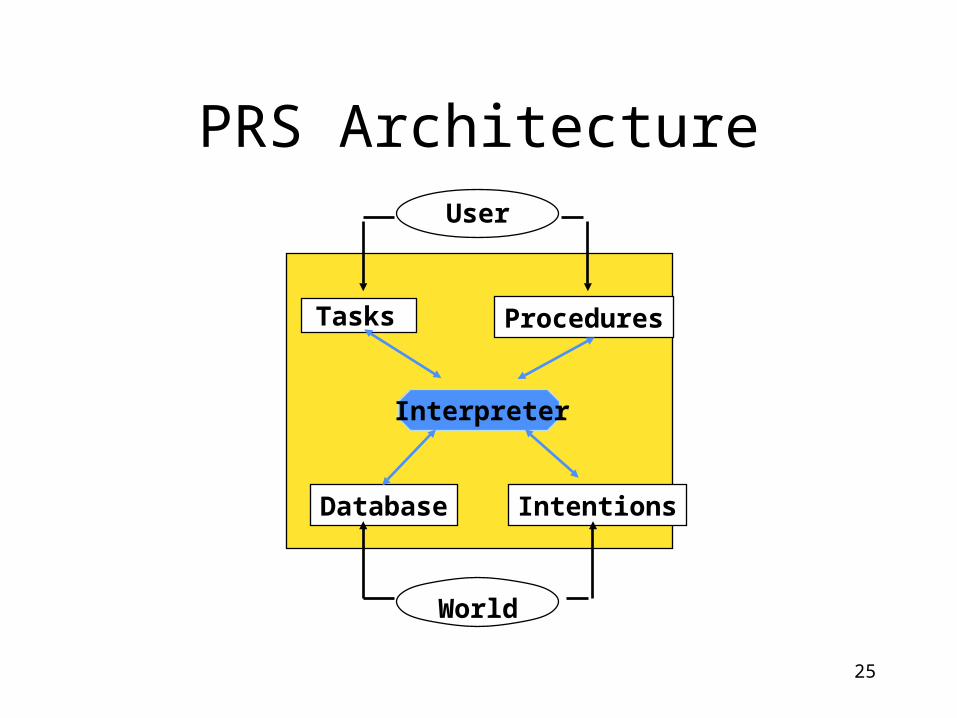
PRS Architecture
Interpreter
Tasks Procedures
IntentionsDatabase
User
World
26
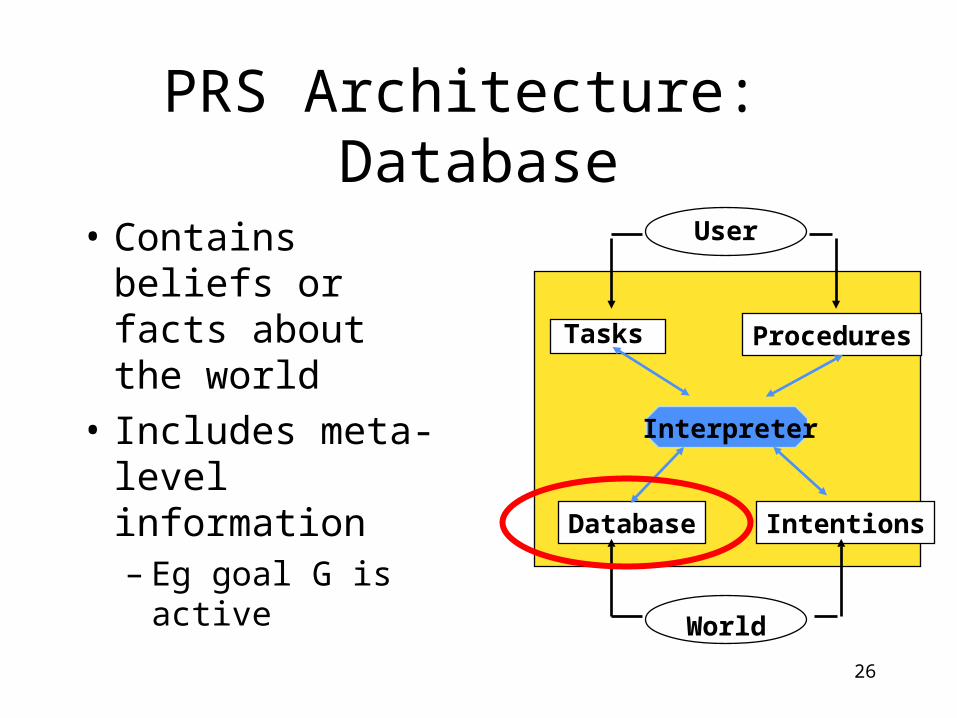
PRS Architecture: Database
• Contains beliefs or facts about the world
• Includes meta-level information– Eg goal G is active
Interpreter
Tasks Procedures
IntentionsDatabase
User
World
27
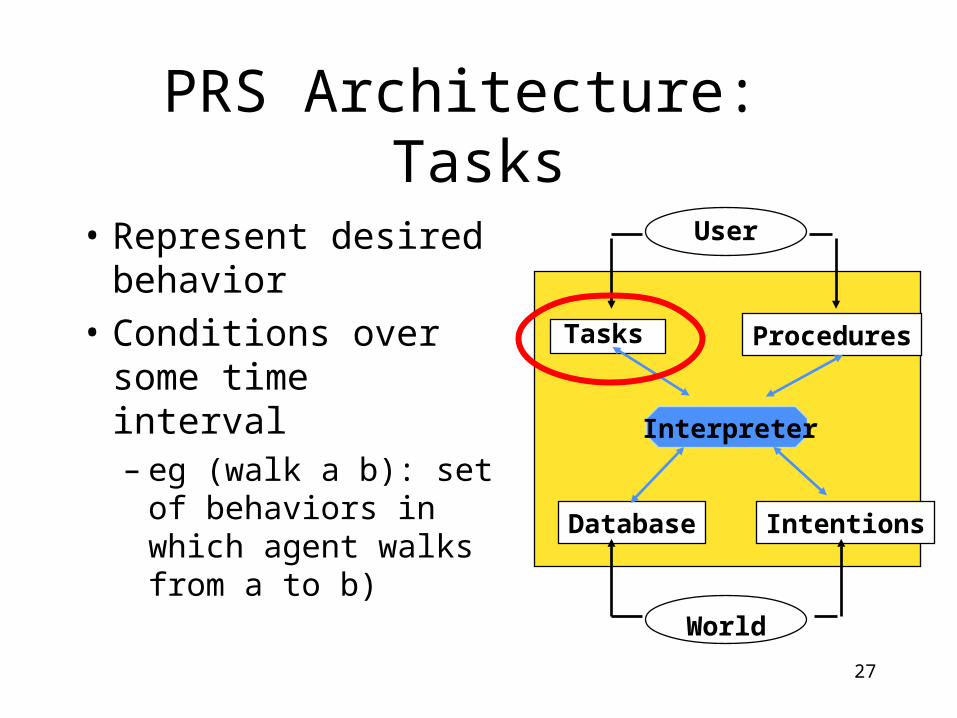
PRS Architecture: Tasks
• Represent desired behavior
• Conditions over some time interval– eg (walk a b): set of
behaviors in which agent walks from a to b)
Interpreter
Tasks Procedures
IntentionsDatabase
User
World

28
Expressing Tasks in a Dynamic Environment
• (! P) -- achieve P
• (? P) -- test P
• (# P) -- maintain P
• (^ C) -- wait until C
• (-> C) -- assert C
• (~> C) -- retract C
29
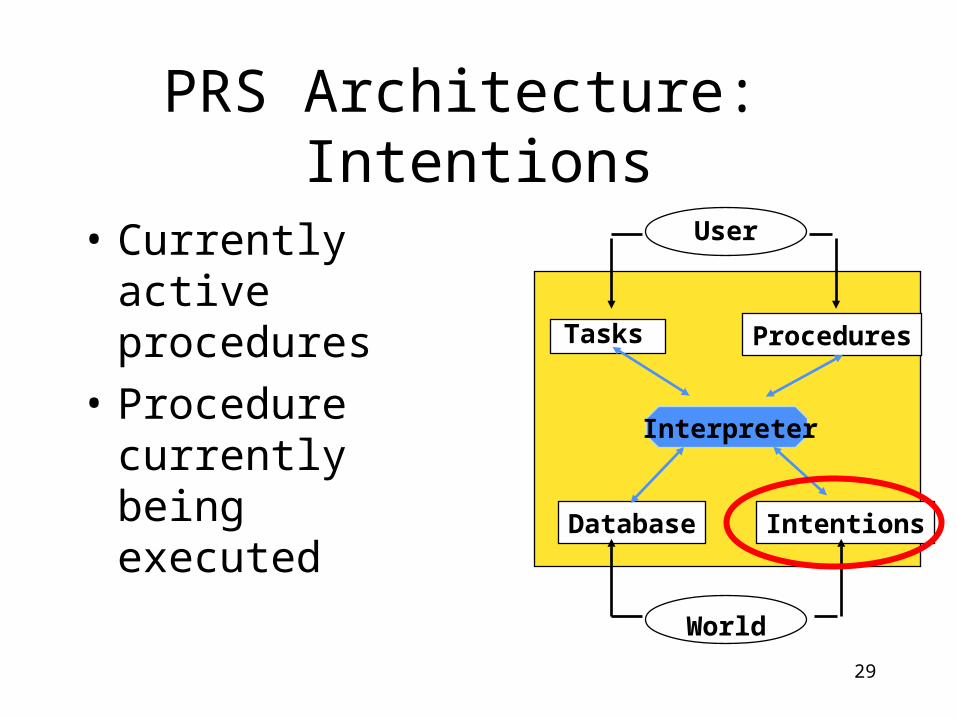
PRS Architecture: Intentions
• Currently active procedures
• Procedure currently being executed
Interpreter
Tasks Procedures
IntentionsDatabase
User
World

30
PRS Architecture: Procedures
• Pre-compiled procedures
• Express actions and tests to achieve goals or to react to conditions
Interpreter
Tasks Procedures
IntentionsDatabase
User
World
31
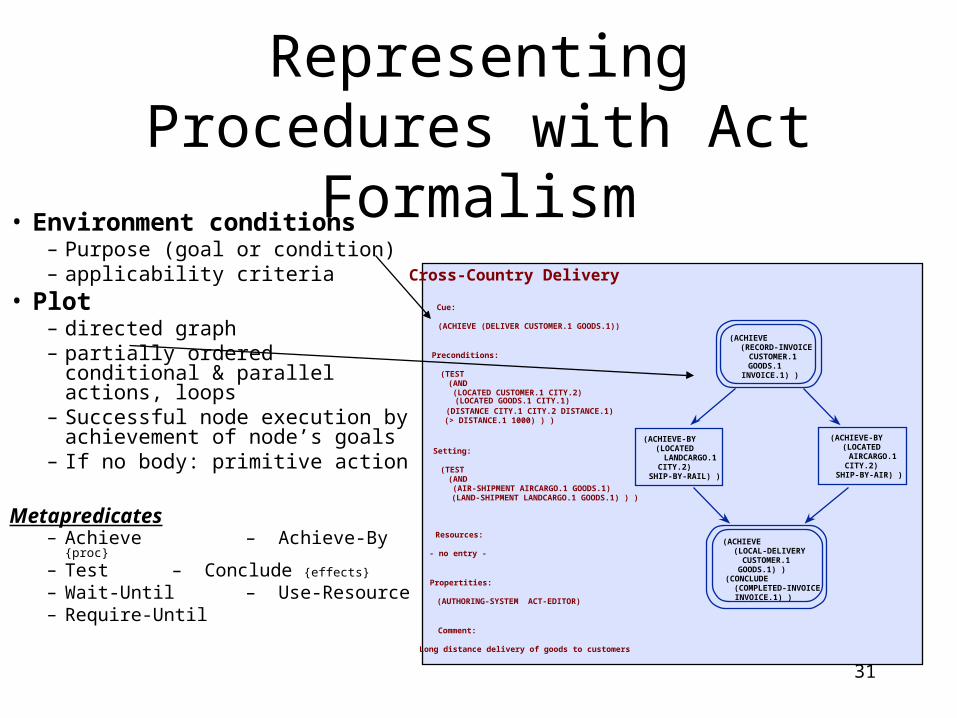
• Environment conditions – Purpose (goal or condition)– applicability criteria
• Plot– directed graph– partially ordered conditional &
parallel actions, loops– Successful node execution by
achievement of node’s goals– If no body: primitive action
Metapredicates– Achieve – Achieve-By {proc}
– Test – Conclude {effects}
– Wait-Until – Use-Resource– Require-Until
Cross-Country Delivery
Cue:
(ACHIEVE (DELIVER CUSTOMER.1 GOODS.1))
Preconditions:
(TEST (AND (LOCATED CUSTOMER.1 CITY.2) (LOCATED GOODS.1 CITY.1)
(DISTANCE CITY.1 CITY.2 DISTANCE.1) (> DISTANCE.1 1000) ) )
Setting:
(TEST (AND (AIR-SHIPMENT AIRCARGO.1 GOODS.1) (LAND-SHIPMENT LANDCARGO.1 GOODS.1) ) )
Resources:
- no entry -
Propertities:
(AUTHORING-SYSTEM ACT-EDITOR)
Comment:
Long distance delivery of goods to customers
(ACHIEVE (RECORD-INVOICE CUSTOMER.1 GOODS.1 INVOICE.1) )
(ACHIEVE (LOCAL-DELIVERY CUSTOMER.1 GOODS.1) )(CONCLUDE (COMPLETED-INVOICE INVOICE.1) )
(ACHIEVE-BY (LOCATED LANDCARGO.1 CITY.2) SHIP-BY-RAIL) )
(ACHIEVE-BY (LOCATED AIRCARGO.1 CITY.2) SHIP-BY-AIR) )
Representing Procedures with Act Formalism
32
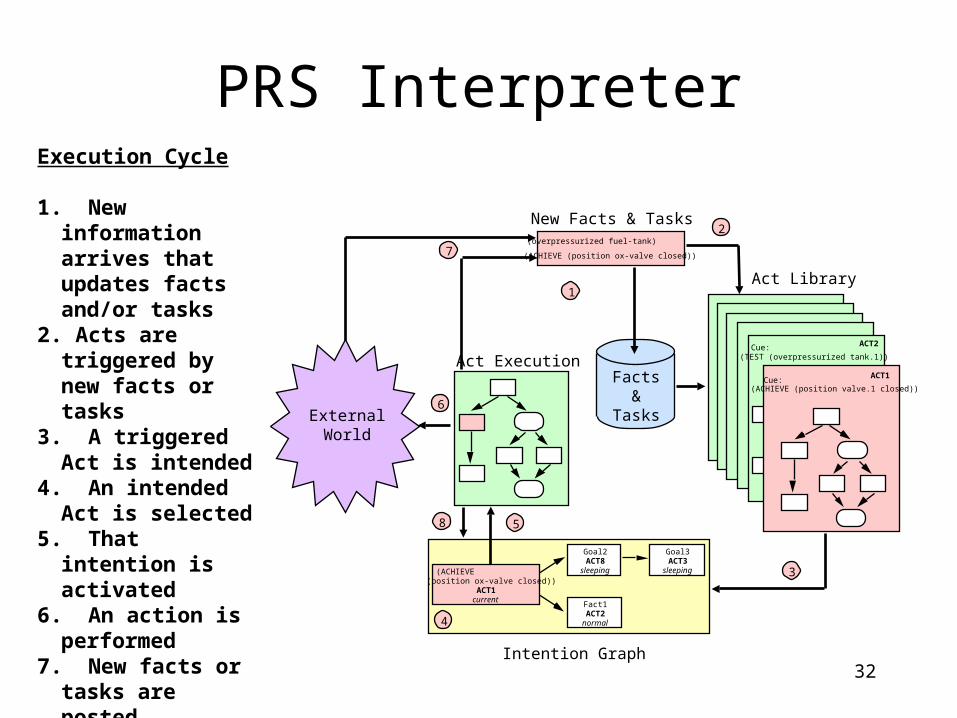
PRS InterpreterExecution Cycle
1. New information arrives that updates facts and/or tasks
2. Acts are triggered by new facts or tasks
3. A triggered Act is intended
4. An intended Act is selected
5. That intention is activated
6. An action is performed
7. New facts or tasks are posted
8. Intentions are updated
Goal2ACT8sleeping
Fact1ACT2normal
Goal3ACT3sleeping
Intention Graph
Cue: (TEST (overpressurized tank.1))
ACT2
Act Library
Act Execution
(overpressurized fuel-tank)
(ACHIEVE (position ox-valve closed))
New Facts & Tasks
ExternalWorld
1
2
3
4
5
6
7
8
Cue: (ACHIEVE (position valve.1 closed))
ACT1Facts&
Tasks
(ACHIEVE (position ox-valve closed))
ACT1current

33
Meta-Reasoning
• Can include meta-level procedures– eg: choose among multiple applicable
procedures– eg: evaluate how much more reasoning can be
done within time constraints– eg: how to achieve a conjunction or disjunction
of goals

RCS Jets
RCS Controls
PT
Rlv Valve
HETank
A BValve
Jet
Regulator
12 345
1 2 3 4 5
T Temp
P P P P
P
T
P P
P Pressure
P
FUTank
Talkback
Switch
A B
Control Panel
12 345
1 2 3 4 5
OP OP OPOPOP
OP CL
OP CL
opengpc
close
opengpc
close
Jet Fail - OnCue Test:
Alarm sounding,RCS warning light on,Status RCS jet.1 is failed-on,GPC displays dir.1 for jet.1 for rcs.1
Preconditions Test:
Direction jet.1 is dir.1
Setting Test:
Connected manifold.ox to jet.1,Connected manifold.fu to jet.1,Connects valve.fu by leg.fu
to manifold.fu,Connects valve.ox by leg.ox
to manifold.ox,Oxidizer-subsystem ox.1 of rcs.1,Fuel-subsystem fu.1 of rcs.1,Part valve.ox of ox.1,Part valve.fu of fu.1
Achieve:Position valve.ox closed,Position valve.fu closed
Achieve:Notify "Thruster jet.1 failed-on"
Test:High-usage of jet.1
Test:Not high-usage of jet.1
Achieve:Notify "Thruster jet.1 failed-on
ELECTRICALLY"
Test:Type jet.1 vernier
Test:Not type jet.1 vernier
Achieve:Notify "Thruster jet.1 failed-on
INPUT CARD"
Achieve:Notify "TURN-OFF rcs.1 manifold.ox
& manifold.fu DRIVER"
Achieve:Pressure manifold.ox is pres.ox,Pressure manifold.fu is pres.fu
Test:> pres.ox 130,> pres.fu 130
Test:≤ pres.ox 130,≤ pres.fu 130
FACTS&
BELIEFS
ExternalTASKS
ExternalFACTS
Executing procedures can post
GOALS, FACTS, & BELIEFS
orsend MESSAGES
TASKS
Procedure Library
Jet Fail - On
Jet Fail - On
Determine new procedures
that are eligiblefor execution
Select procedures for execution
Dump Propellant
Regulator Test
Regulator Test
ShuttleGPC
MESSAGES
Shuttle’s RCS Malfunction Handling
• Automates specification and execution of RCS malfunction procedures.
• Reacts to changes in RCS. Ensures safe operation while carrying out diagnosis and remediation procedures.
35
Multiple Tasks, Multiple Agenst
• Multithreaded operation: multiple tasks being performed, runtime stacks where tasks are executed, suspended, and resumed
• Supports distributed planning: several PRS agents run asynchronously and communicate through message passing

36
Anytime Algorithms
• Time to deliberate about events varies
• Algorithms to compute the best answers they can in the time available
• Anytime algorithms– Can be suspended and resumed with little overhead
– Can be terminated at any time and return some answer
– The answers returned improve with time

37
A time-dependent planning problem
• Observe (O)• React (E): time required to carry out reaction
of type E• Herald (C): earliest observation time that
enables prediction of condition C requiring a response
• Utility (C,E): utility of reacting to with E to C• Response (C): time between having
information to predict C and C occurring
38
When Time is Short…
• Prediction time: time required to predict event given info available
• Deliberation time: max time for committing to a reaction (if reaction is needed)
• Reaction time: time required to react to event– React(E) + Response(C)
39
Deliberation
• Decision procedure D for each C: given t time to deliberate, D returns best guess E about how to react
• Utility(C, D(C,T))
• Deliberation scheduling:– Given several deliberation procedures,
determine how to best allocate deliberation time
40
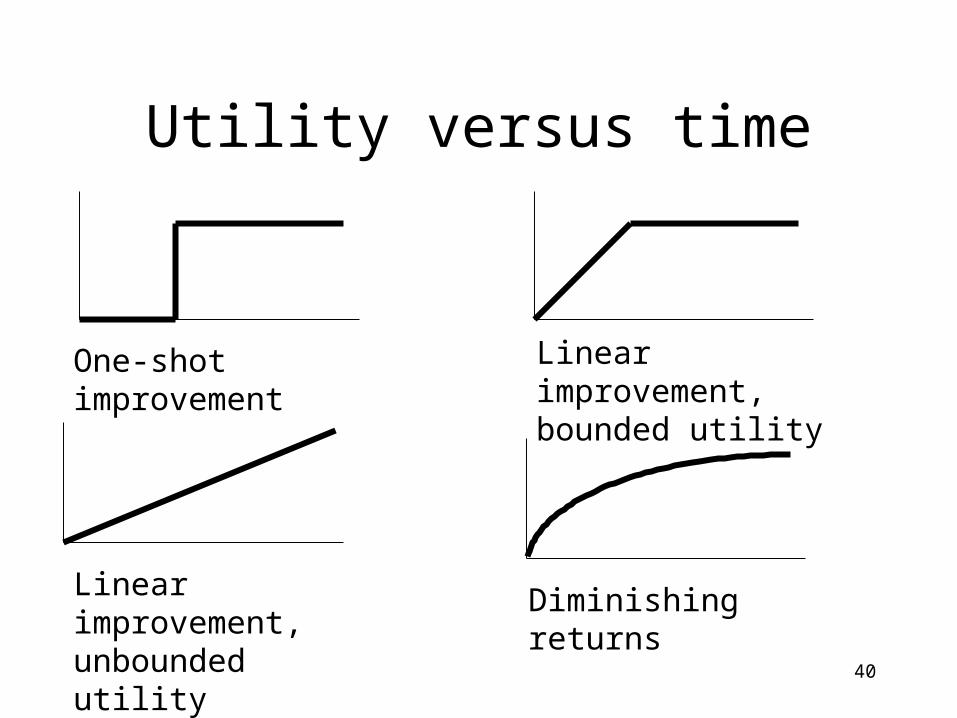
Utility versus time
One-shot improvement Linear improvement, bounded utility
Linear improvement, unbounded utility
Diminishing returns
41
Other Approaches and Issues
• Blackboard architectures (Guardian)• Universal plans• Related issues covered in the course:
– Reasoning about uncertainty– Learning
• from the environment• Becoming increasingly reactive
42
Summary
• Control systems– Networks of “variables” (arcs) and “functions” (nodes)
• Reactive Action Packages (RAPs)– Networks of “conditions” and “tasks”
• Task Control Architecture (TCA)– Network arranged according to “vertical capabilities”
• Procedural Reasoning System (PRS)– Integrates planning, BDI, and reactive techniques
• Anytime algorithms– When time is short, managing what you think about
• Learning and uncertainty reasoning