1 plan-space planning dr. héctor muñoz-avila sources: ch. 5 appendix a slides from dana nau’s...
TRANSCRIPT

1
Plan-Space Planning
Dr. Héctor Muñoz-Avila
Sources:• Ch. 5• Appendix A•Slides from Dana Nau’s lecture

2
Domains for Evaluations http://members.deri.at/~joergh/ff-domains.html Choose one of the following:
Assembly Freecell Fridge Logistics Miconic-STRIPS Schedule Tyreworld
E-mail me your choice. First take, first get. You may need to adapt domain to run in a system. You need 30 problems.
Create them manually, or Use a random problem generator (yours or create one) Problems must scale: 4 goals, 5 goals, …, 9 goals (5 problems each)

3
Remember the Sussman Anomaly?
Initial state goal
A set of goals G is serializable if: An ordering g1, …, gn of the goals in G can be found such as:
» Every plan P1 satisfying g1, can be extended to a plan P2 satisfying g1 and g2, and so forth
• Extend means that neither constraints nor steps in P1 need to be removed to obtain P2
Problem: Goals in the Sussman Anomaly are not serializable This is not an exception. Goals for many problems are not serializable
c
a b c
a
b

4
Plan-Space Planning
Initial plancomplete plan for
goals
• Search is performed in the plan space
• Plan space•V: set of plans•E: plan refinement transitions
• As before: computed graph is a subset of plan space
•Remember the number of states for DWR states?
• Least commitment:•Does not commit on action ordering

5
Plan-Space Planning - Basic Idea Backward search from the goal Each node of the search space is a partial plan
» A set of partially-instantiated actions» A set of constraints
Make more and more refinements,until we have a solution
Types of constraints: precedence constraint:
a must precede b binding constraints:
» inequality constraints, e.g., v1 ≠ v2 or v ≠ c» equality constraints (e.g., v1 = v2 or v = c) or substitutions
causal link:» use action a to establish the precondition p needed by action b
How to tell we have a solution: no more flaws in the plan Will discuss flaws and how to resolve them A partial plan is complete if plan has no flaws
a(x)Precond: …Effects: p(x)
b(y)Precond: p(y)Effects: …
c(x)Precond: p(x)Effects: …
p(x)
x ≠ y
Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/
Can this link be made?

6
Flaw: An action a has a precondition p that we haven’t
decided how to establish
Resolving the flaw: Find an action b
• (either already in the plan, or insert it) that can be used to establish p
• can precede a and produce p Instantiate variables Create a causal link
a(y)Precond: …Effects: p(y)
c(x)Precond: p(x)Effects: …
a(x)Precond: …Effects: p(x)
c(x)Precond: p(x)Effects: …
p(x)
Open Goal
Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/

7
Threat
Flaw: a deleted-condition interaction Action a establishes a condition (e.g., p(x)) for action b Another action c is capable of deleting this condition p(x)
» And action c is “parallel” to the causal link Resolving the flaw:
impose a constraint to prevent c from deleting p(x) Three possibilities:
Make b precede c Make c precede a Constrain variable(s)
to prevent c fromdeleting p(x)
a(x)Precond: …Effects: p(x)
c(y)Precond: …Effects: p(y)
b(x)Precond: p(x)Effects: …
p(x)
8
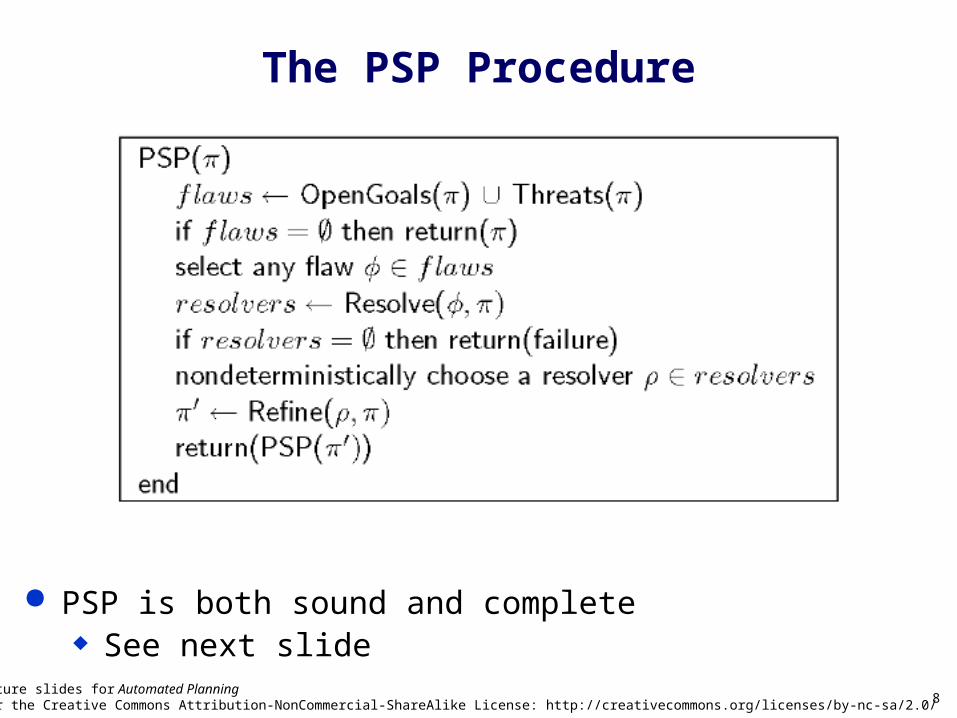
The PSP Procedure
PSP is both sound and complete See next slide
Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/

9
Solution: A Complete Partial Plan
Plan: any sequence of actions = a1, a2, …, an such thateach ai is a ground instance of an operator in O
The plan is a solution for P=(O,s0,g) if it is executable and achieves g
i.e., if there are states s0, s1, …, sn such that
» (s0,a1) = s1
» (s1,a2) = s2
» …
» (sn–1,an) = sn
» sn satisfies g
But in PSP returns a “complete partial plan”. Is this a solution in terms of the definition of plans above?

10
Example Similar (but not identical) to an example in Russell and Norvig’s
Artificial Intelligence: A Modern Approach (1st edition) Operators:
Start
Precond: none
Effects: At(Home), sells(HWS,Drill), Sells(SM,Milk), Sells(SM,Banana)
Finish
Precond: Have(Drill), Have(Milk), Have(Banana), At(Home) Go(l,m)
Precond: At(l)
Effects: At(m), At(l) Buy(p,s)
Precond: At(s), Sells(s,p)
Effects: Have(p)Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/

11
Example (continued)
Initial plan
Sells(SM,Milk), Sells(SM,Bananas) At(Home), Sells(HWS,Drill),
Have(Bananas), At(Home)Have(Drill), Have(Milk),
Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/

12
Example (continued)
The only possible ways to establish the “Have” preconditions
At(s1), Sells(s1,Drill) At(s2), Sells(s2,Milk) At(s3), Sells(s3,Bananas)
Buy(Drill, s1) Buy(Milk, s2) Buy(Bananas, s2)
Have(Drill), Have(Milk), Have(Bananas), At(Home)
Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/
“standardization”

13
Example (continued)
The only possible way to establish the “Sells” preconditions
Buy(Drill,HWS) Buy(Milk,SM) Buy(Bananas,SM)
At(SM), Sells(SM,Milk)At(HWS), Sells(HWS,Drill) At(SM), Sells(SM,Bananas)
Have(Drill), Have(Milk), Have(Bananas), At(Home)
Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/
14
At(SM), Sells(SM,Milk)At(HWS), Sells(HWS,Drill) At(SM), Sells(SM,Bananas)
At(x)
Buy(Milk,SM) Buy(Bananas,SM)
At(l2)
Go(l2, SM)
At(l1)
Go(l1,HWS)
Buy(Drill,HWS)
Have(Drill), Have(Milk), Have(Bananas), At(Home)
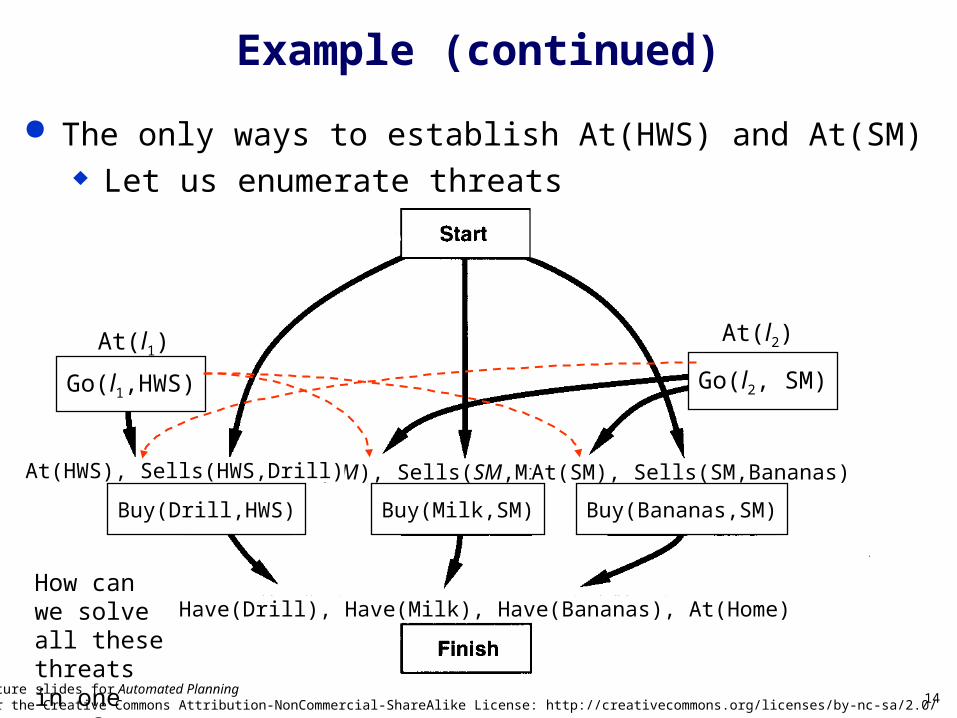
Example (continued)
The only ways to establish At(HWS) and At(SM) Let us enumerate threats
How can we solve all these threats in one step?
Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/

15
To resolve the third threat, make Buy(Drill) precede Go(SM) This resolves all three threats
Example (continued)
At(SM), Sells(SM,Milk)At(HWS), Sells(HWS,Drill) At(SM), Sells(SM,Bananas)
At(x)
Buy(Milk,SM) Buy(Bananas,SM)
At(l2)
Go(l2, SM)
At(l1)
Go(l1,HWS)
Buy(Drill,HWS)
Have(Drill), Have(Milk), Have(Bananas), At(Home)
Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/

16
Example (continued)
Establish At(l1) with l1=Home
At(SM), Sells(SM,Milk)At(HWS), Sells(HWS,Drill) At(SM), Sells(SM,Bananas)
At(x)
Buy(Milk,SM) Buy(Bananas,SM)
At(l2)
Go(l2, SM)
At(Home)
Go(Home,HWS)
Buy(Drill,HWS)
Have(Drill), Have(Milk), Have(Bananas), At(Home)
Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/

17
Example (continued)
Establish At(l2) with l2=HWS
Buy(Milk,SM) Buy(Bananas,SM)
At(x) At(HWS)
Go(HWS,SM)
At(Home)
Go(Home,HWS)
At(SM), Sells(SM,Milk)At(HWS), Sells(HWS,Drill) At(SM), Sells(SM,Bananas)
Buy(Drill,HWS)
Have(Drill), Have(Milk), Have(Bananas), At(Home)
Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/

18
Example (continued)
Establish At(Home) for Finish
Buy(Milk,SM) Buy(Bananas,SM)
At(x) At(HWS)
Go(HWS,SM)
At(Home)
Go(Home,HWS)
At(SM), Sells(SM,Milk)At(HWS), Sells(HWS,Drill) At(SM), Sells(SM,Bananas)
Buy(Drill,HWS)
Have(Drill), Have(Milk), Have(Bananas), At(Home)
At(l3)
Go(l3, Home)
Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/

19
Example (continued)
Constrain Go(Home) to remove threats to At(SM)
Buy(Milk,SM) Buy(Bananas,SM)
At(x) At(HWS)
Go(HWS,SM)
At(Home)
Go(Home,HWS)
At(SM), Sells(SM,Milk)At(HWS), Sells(HWS,Drill) At(SM), Sells(SM,Bananas)
Buy(Drill,HWS)
Have(Drill), Have(Milk), Have(Bananas), At(Home)
At(l3)
Go(l3, Home)
Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/

20
Complete Partial Plan
Establish At(l3) with l3=SM
Buy(Milk,SM) Buy(Bananas,SM)
At(x) At(HWS)At(Home)
Go(Home,HWS)
At(SM), Sells(SM,Milk)At(HWS), Sells(HWS,Drill) At(SM), Sells(SM,Bananas)
Buy(Drill,HWS)
Have(Drill), Have(Milk), Have(Bananas), At(Home)
At(SM)
Go(SM,Home)
Go(HWS,SM)
Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/

21
Comments
PSP doesn’t commit to orderings andinstantiations until necessary Avoids generating search trees like this one:
Problem: how to prune infinitely long paths? Loop detection is based on recognizing states
we’ve seen before In a partially ordered plan, we don’t know the states
» Computing an state is NP complete
Can we prune if we see the same action more than once?
a bc
b a
b a ba c
b c ac b
goal
go(b,a) go(a,b) go(b,a) at(a)• • •
No. Sometimes we might need the same action several times in different states of the world (see next slide)

22
Example 3-digit binary counter starts at 000, want to get to 110
s0 = {d3=0, d2=0, d1=0}
g = {d3=1, d2=1, d1=0}
Operators to increment the counter by 1:
incr0
Precond: d1=0
Effects: d1=1
incr01
Precond: d2=0, d1=1
Effects: d2=1, d1=0
incr011
Precond: d3=0, d2=1, d1=1
Effects: d3=1, d2=0, d1=0
Veloso call this “linkiability”

23
Comments (II) Note a potential combinatorial problem when solving threats
Can someone explain?
Why does PSP solves the Sussman Anomaly?
Heuristics for PSP might be harder to formulate than with state space planning Why?
Universal Classical Planning Combines state-space and plan-space planning in an unified
framework

24
Reminder: STRIPS and the Sussman Anomaly
C
A B
B C
A
Pick up B
Put B on C
Pick up C
Pick up A
Put C on table
Put A on B
C
A
B
c
a bc
a
b

25
POP and the Sussman Anomaly
C
A B
B
A
Pick up B
Put B on C
Pick up C
Pick up A
Put C on table
Put A on B
C
B
c
a bc
a
b
Can we sort these steps
to achieve these two goals?