1 imaging techniques for flow and motion measurement lecture 6 lichuan gui university of mississippi...
TRANSCRIPT
1
Imaging Techniques for Flow and Motion Measurement
Lecture 6
Lichuan Gui
University of Mississippi
2011
PIV Recording EvaluationPIV Recording Evaluation
2
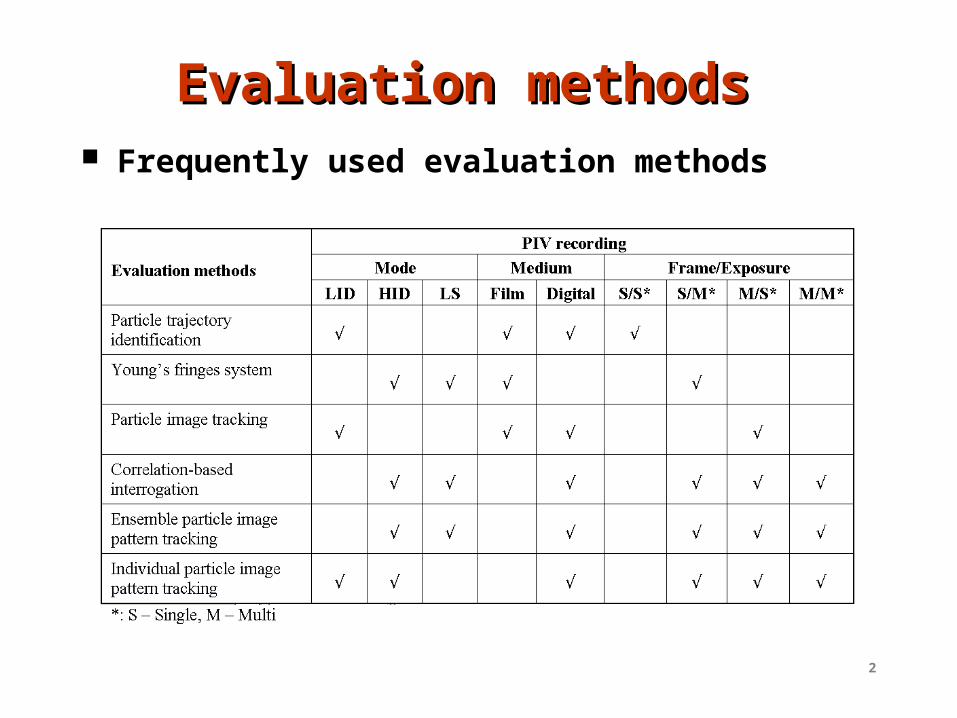
Evaluation methods Evaluation methods Frequently used evaluation methods

3
Evaluation methods Evaluation methods Particle trajectory identification
PIV recording- Single frame- Single long time exposure - LID mode
- Film or digital recording Evaluation
- Read film recordings with a microscope system - Identify particle trajectories in digital recording y
x
22 xyS
t
SV
4
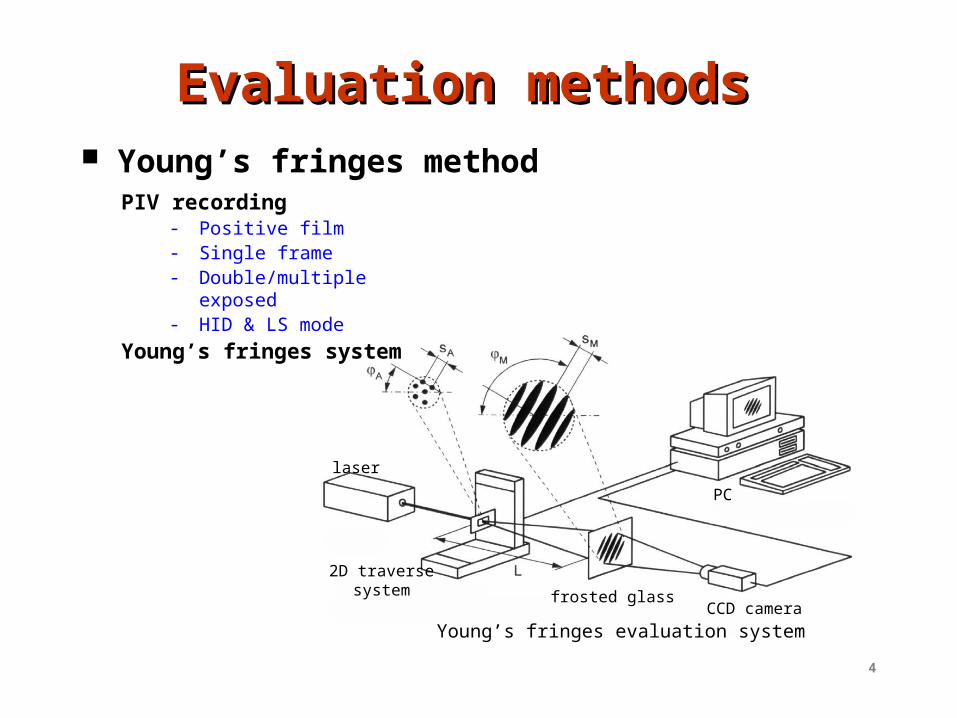
Young’s fringes evaluation system
laser
PC
2D traversesystem
CCD camera frosted glass
Evaluation methods Evaluation methods Young’s fringes method
PIV recording- Positive film - Single frame- Double/multiple exposed- HID & LS mode
Young’s fringes system
5
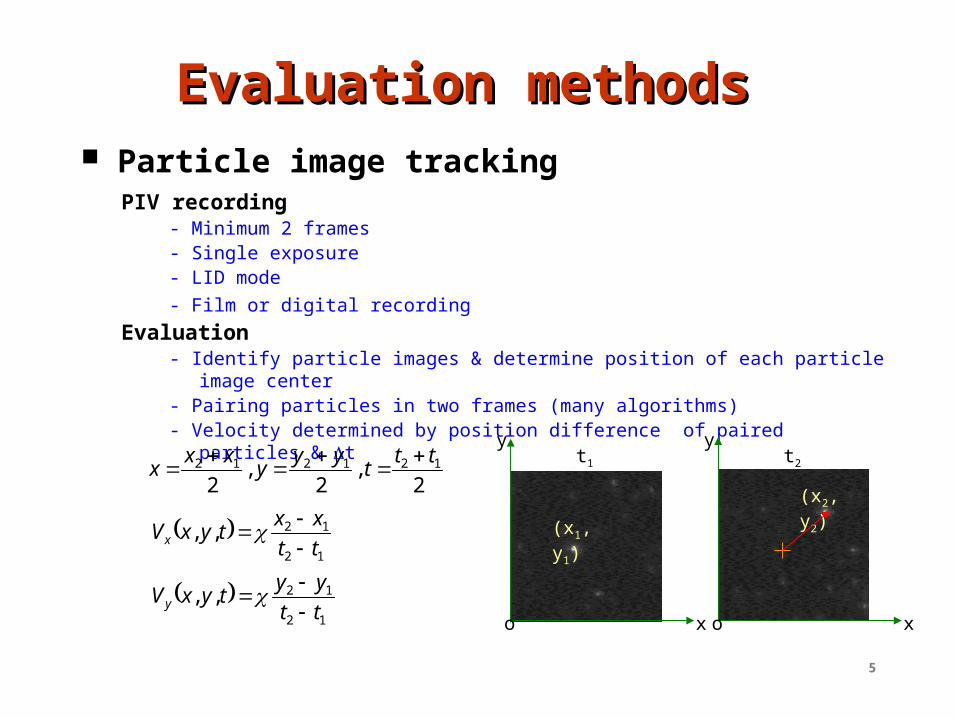
Evaluation methods Evaluation methods Particle image tracking
PIV recording- Minimum 2 frames- Single exposure - LID mode
- Film or digital recording Evaluation
- Identify particle images & determine position of each particle image center - Pairing particles in two frames (many algorithms)- Velocity determined by position difference of paired particles & t
t1 t2
2,
2,
2121212 tt
tyy
yxx
x
12
12,,tt
xxtyxVx
12
12,,tt
yytyxVy
o x
y
o x
y
(x2, y2)
(x1, y1)
6
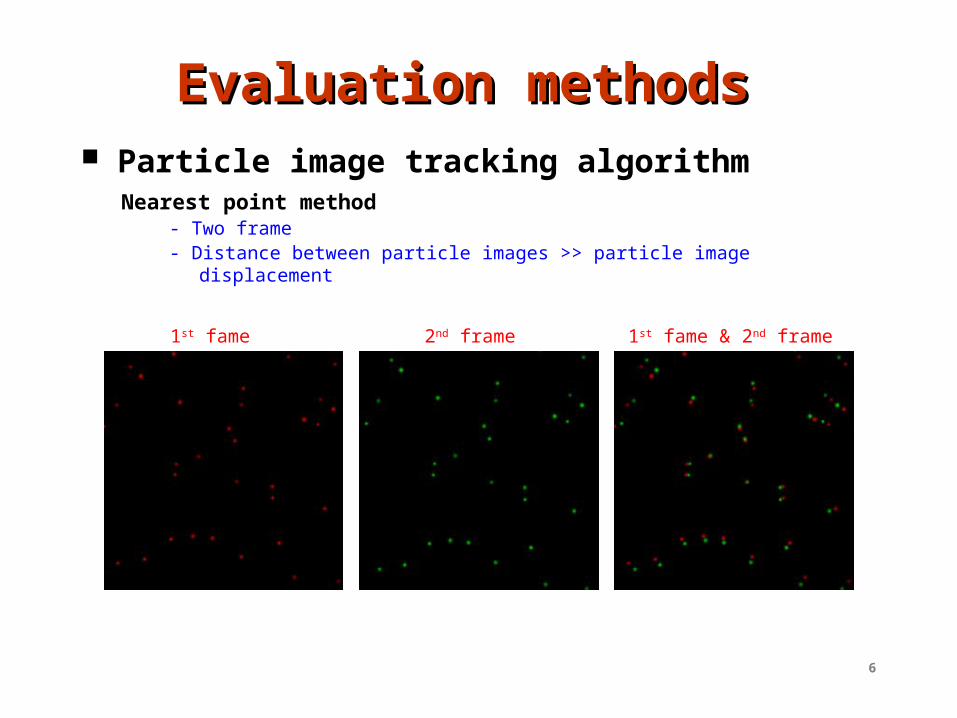
Evaluation methods Evaluation methods Particle image tracking algorithm
Nearest point method- Two frame- Distance between particle images >> particle image displacement
2nd frame1st fame 1st fame & 2nd frame
7
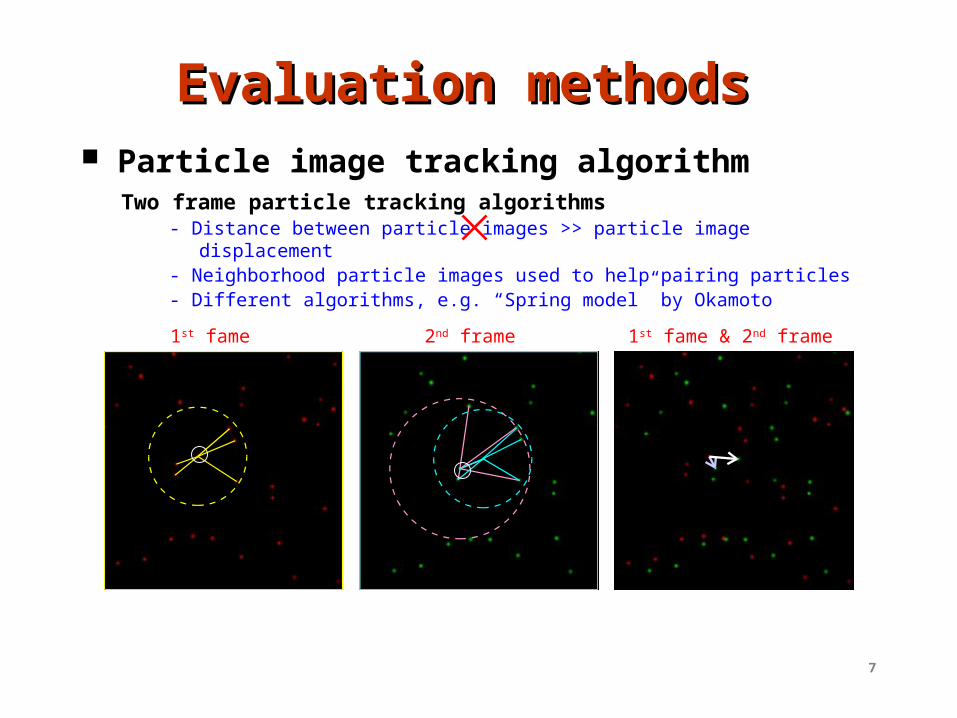
Evaluation methods Evaluation methods Particle image tracking algorithm
Two frame particle tracking algorithms - Distance between particle images >> particle image displacement - Neighborhood particle images used to help pairing particles- Different algorithms, e.g. “Spring model” by Okamoto
2nd frame1st fame 1st fame & 2nd frame
8
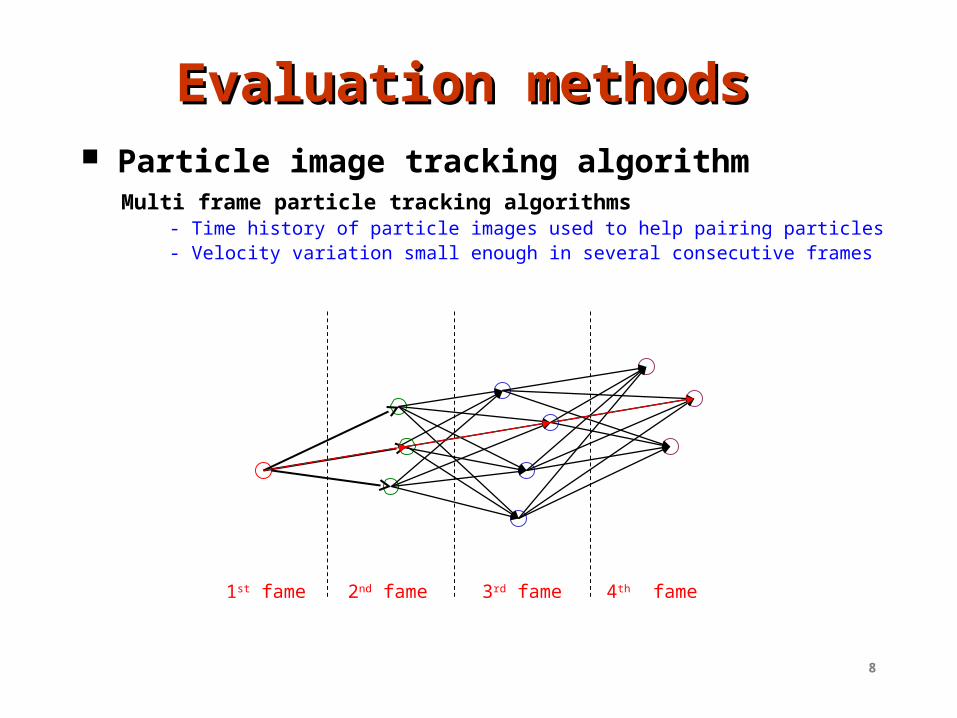
Evaluation methods Evaluation methods Particle image tracking algorithm
Multi frame particle tracking algorithms - Time history of particle images used to help pairing particles- Velocity variation small enough in several consecutive frames
1st fame 2nd fame 3rd fame 4th fame
9
m
n
(m, n)
-SS
o
Auto-correlation
Cross-correlation
0.0
0.5
1.0
-15-10
-50
510
15
m
-10
0
10
n
(m,n)
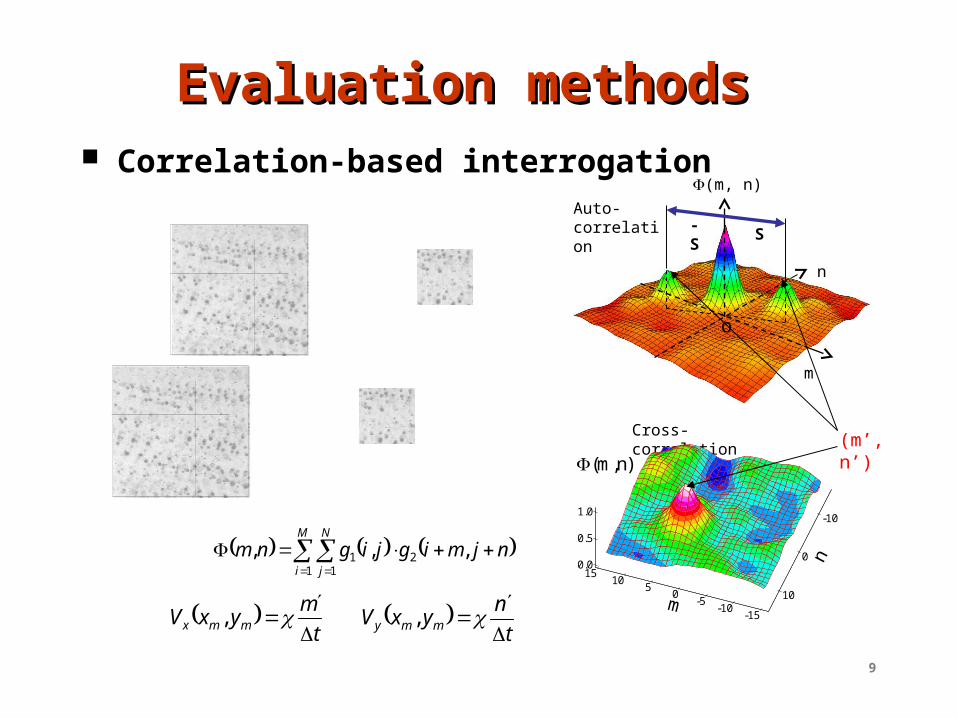
Evaluation methods Evaluation methods Correlation-based interrogation
M
i
N
j
njmigjignm1 1
21 ,,,
t
myxV mmx
,
t
nyxV mmy
,
(m’,n’)
10
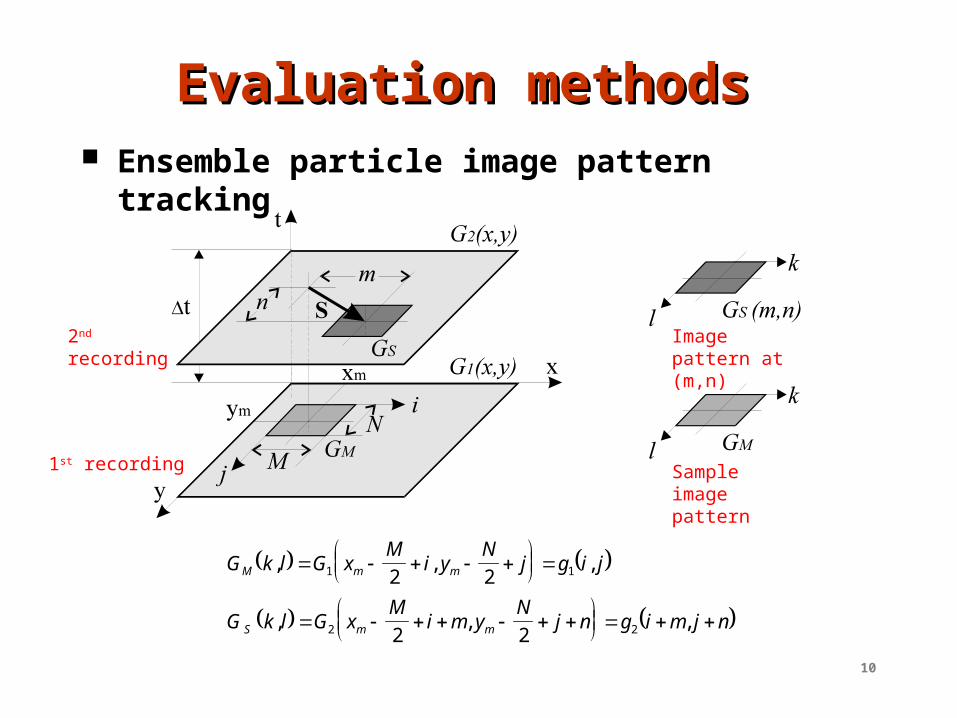
Evaluation methods Evaluation methods Ensemble particle image pattern tracking
G k l G xM
i yN
j g i j
G k l G xM
i m yN
j n g i m j n
M m m
S m m
, , ,
, , ,
1 1
2 2
2 2
2 2
1st recording
2nd recording
Sample image pattern
Image pattern at (m,n)
11
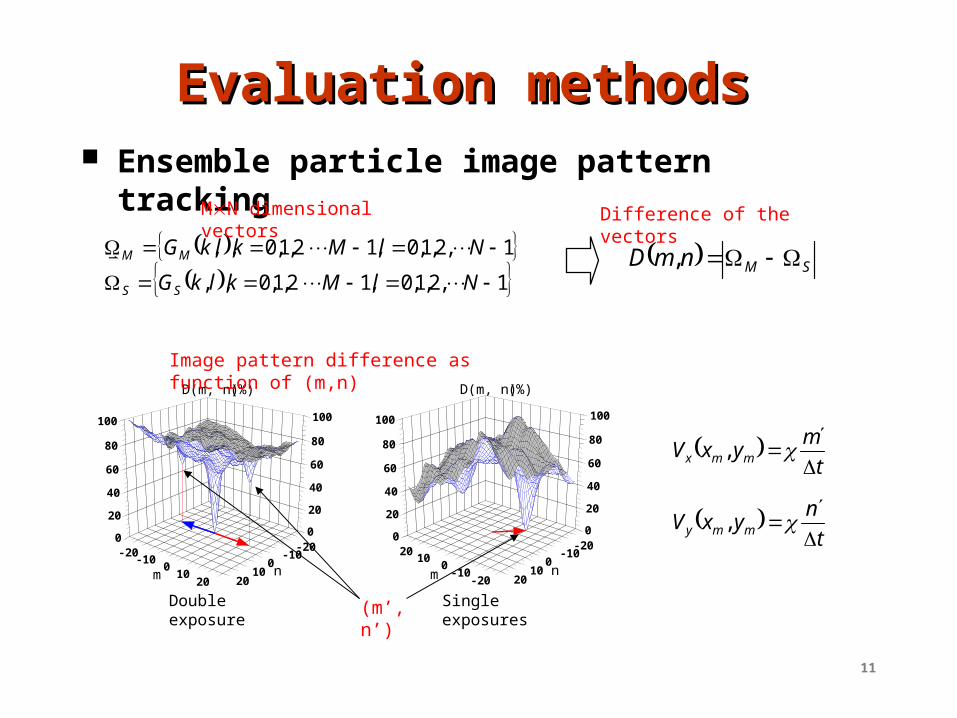
Evaluation methods Evaluation methods Ensemble particle image pattern tracking
1,2,1,0,12,1,0,,
1,2,1,0,12,1,0,,
NlMklkG
NlMklkG
SS
MM
MN dimensional vectors
SMnmD
,
Difference of the vectors
D(m, n) (%)
nm
-20-10
010
20
-20-10
010
20
0
20
40
60
80
100
0
20
40
60
80
100
-20-10
010
20-20-10
010
20
0
20
40
60
80
100
0
20
40
60
80
100
D(m, n) (%)
m n
Double exposure Single exposures
Image pattern difference as function of (m,n)
(m’,n’)
t
myxV mmx
,
t
nyxV mmy
,
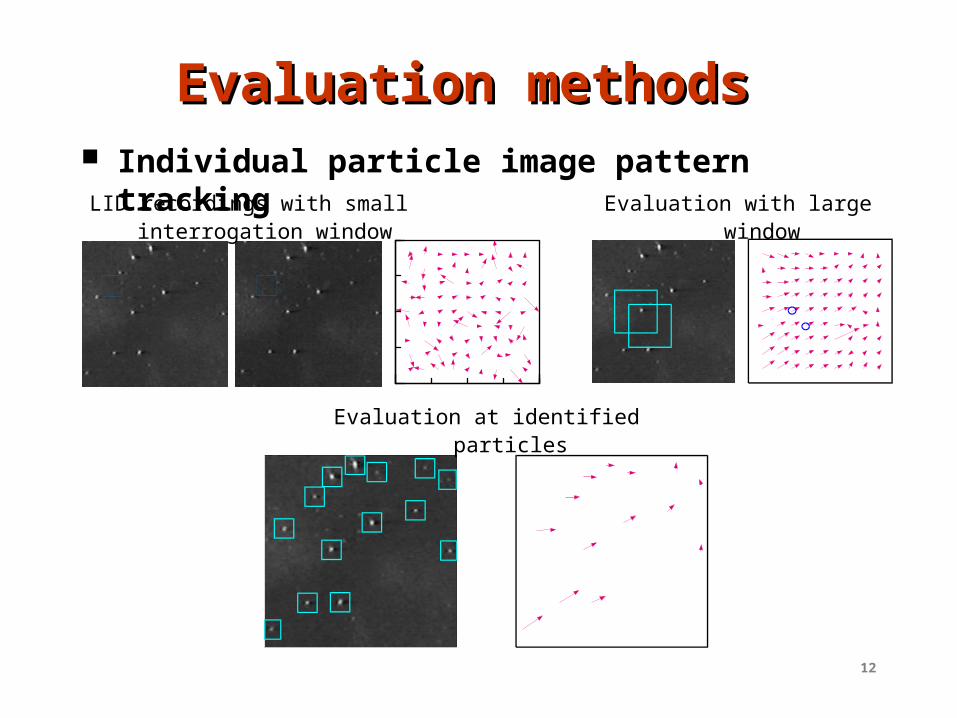
12
Evaluation with large window
Evaluation at identified particles
LID recordings with small interrogation window
Evaluation methods Evaluation methods Individual particle image pattern tracking

13
1. Read EDPIV help manual pages:“PIV recording simulation settings”
2. Create a synthetic PIV recording pair of LID modeParticle number density: 1 / 32x32 pixelsRandom noise: intensity=0, mean value=804-roll-mill flow, Ax=500, Ay=500
In start window: menu choice “ File \ New image” and “Processing” button;
In “Image processing” window: menu “Tools \ Simulation settings \ Particle”menu “Tools \ Simulation settings \ Noise” menu “Tools \ Simulation settings \ Flow” menu “Tools \ One pair”
Press button “I” to switch imagesView overlapped image in “Evaluation window”
HomeworkHomework