1 33rd annual simulation symposium anss2000, april 16-20, 2000. washington, d.c samir otmane e-mail...
Post on 19-Dec-2015
218 views
TRANSCRIPT
1
33rd 33rd AnnualAnnual Simulation Simulation symposium symposium ANSS2000, April 16-20, 2000. Washington, D.C ANSS2000, April 16-20, 2000. Washington, D.C
Samir OtmaneSamir Otmane E-mail : [email protected] E-mail : [email protected]
CEMIF, Laboratoire Systèmes ComplexesCEMIF, Laboratoire Systèmes Complexes Http : http://lsc.cemif.univ-evry.fr:8080/~otmane Http : http://lsc.cemif.univ-evry.fr:8080/~otmane 40 Rue du Pelvoux 91020 Evry, France40 Rue du Pelvoux 91020 Evry, France Tél Tél : 01/69/47/75/04 Fax : 01/69/47/75/99 : 01/69/47/75/04 Fax : 01/69/47/75/99
Active Virtual Guides as an Active Virtual Guides as an Apparatus for AugmentedApparatus for Augmented
Reality Based Telemanipulation Reality Based Telemanipulation System on the InternetSystem on the Internet
Active Virtual Guides as an Active Virtual Guides as an Apparatus for AugmentedApparatus for Augmented
Reality Based Telemanipulation Reality Based Telemanipulation System on the InternetSystem on the Internet
2
ContentsContents
IntroductionIntroduction ARITI SystemARITI System Virtual guides/fixtures Virtual guides/fixtures
• Unified FormalismUnified Formalism
• Simple and Complex Virtual fixturesSimple and Complex Virtual fixtures
• Virtual guides representationVirtual guides representation
• Manipulation on the screenManipulation on the screen
• Deforming guides to generate an appropriate guidesDeforming guides to generate an appropriate guides
Experiments and ResultsExperiments and Results Conclusion and perspectivesConclusion and perspectives

3
IntroductionIntroduction- Tele-work -- Tele-work -
Master site Master site Communication supportCommunication support Slave site Slave site• The slave site is distant from the master site.The slave site is distant from the master site.• Information feedback is corrupted by a bandwidth Information feedback is corrupted by a bandwidth
limitation of communication support .limitation of communication support .• Time delay is not constant when using any Time delay is not constant when using any
communication network.communication network.• No portable and user-friendly Tele-work systems.No portable and user-friendly Tele-work systems.• Human performances are decreased during direct control Human performances are decreased during direct control
of remote Tele-manipulation task.of remote Tele-manipulation task.
Sending Sending ordersorders
Information Information feedbackfeedback
4
Virtual realityVirtual reality and and Augmented RealityAugmented Reality technologies are used technologies are used to :to : Overcome the instability of time delay,Overcome the instability of time delay, Complete or compensate the information feedback (video Complete or compensate the information feedback (video
feedback for instance) feedback for instance)
JAVA JAVA programming Language is used to implement the Man programming Language is used to implement the Man Machine Interface of Machine Interface of ARITIARITI system to : system to : Give a portable system and Give a portable system and User-friendly Tele-work systemUser-friendly Tele-work system
ARITIARITI system system

5
Interaction between Human Interaction between Human and and remoteremote Task Environment Task Environment
During interaction control of a remote robotic terminal tool, the user mustDuring interaction control of a remote robotic terminal tool, the user must
• Perform a physical action to initiate motion from the robot,Perform a physical action to initiate motion from the robot,
• Wait for the system to respond,Wait for the system to respond,
• Perceive the physical effect onto the robot and task environment,Perceive the physical effect onto the robot and task environment,
• Decide what to do next,Decide what to do next,
• Repeat the cycle until the task is completed.Repeat the cycle until the task is completed. Motor activity is initiated through Motor activity is initiated through interactioninteraction with a software interface via with a software interface via
Keyboard and mouse, joystick, master arm, etc...Keyboard and mouse, joystick, master arm, etc...
HHAARRDD
SSOOFFTT
NN
EE
TT
WW
Human Human OperatorOperator
Robotic InterfaceRobotic Interface Remote Robotic EnvironmentRemote Robotic Environment

6
Interactions withInteractions withA R I T IA R I T I
Three kinds of visual assistance are given to human Three kinds of visual assistance are given to human operator for operator for friendly human computer interactionfriendly human computer interaction using the using the ARITIARITI interface. These visual helps are devoted to : interface. These visual helps are devoted to : Environment perceptionEnvironment perception Robot controlRobot control Robot supervisionRobot supervision
PerceptionPerception
ControlControl
SupervisionSupervision
Human Human OperatorOperator
HHAARRDD
NN
EE
TT
WW
Remote Remote EnvironmentEnvironment
Robotic InterfaceRobotic Interface

7
Assistance for Assistance for EnvironmentEnvironment PerceptionPerception
Several Virtual view pointsSeveral Virtual view points
++
Video image feedbackVideo image feedback
Perception modulePerception module
Human Human OperatorOperator
In Control moduleIn Control module
8
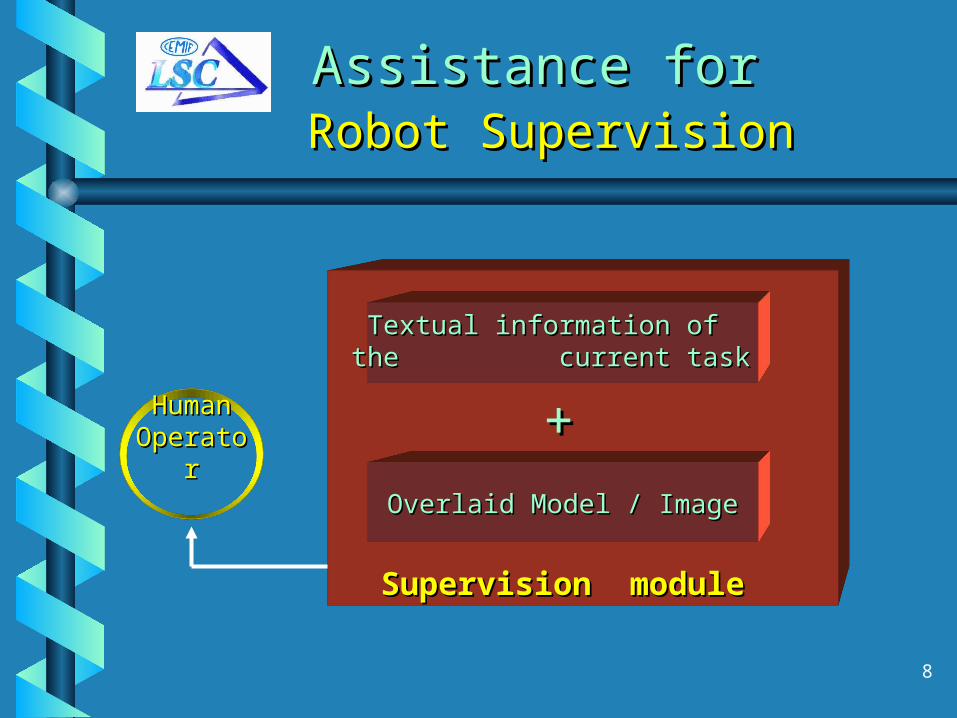
Assistance for Assistance for RobotRobot SupervisionSupervision
Textual information of the Textual information of the current task current task
++Overlaid Model / ImageOverlaid Model / Image
Supervision moduleSupervision module
Human Human OperatorOperator

9
Assistance for Assistance for Robot ControlRobot Control
Virtual robotVirtual robot
Control moduleControl module
Human Human OperatorOperator
(HO)(HO)
In Supervision moduleIn Supervision module
10
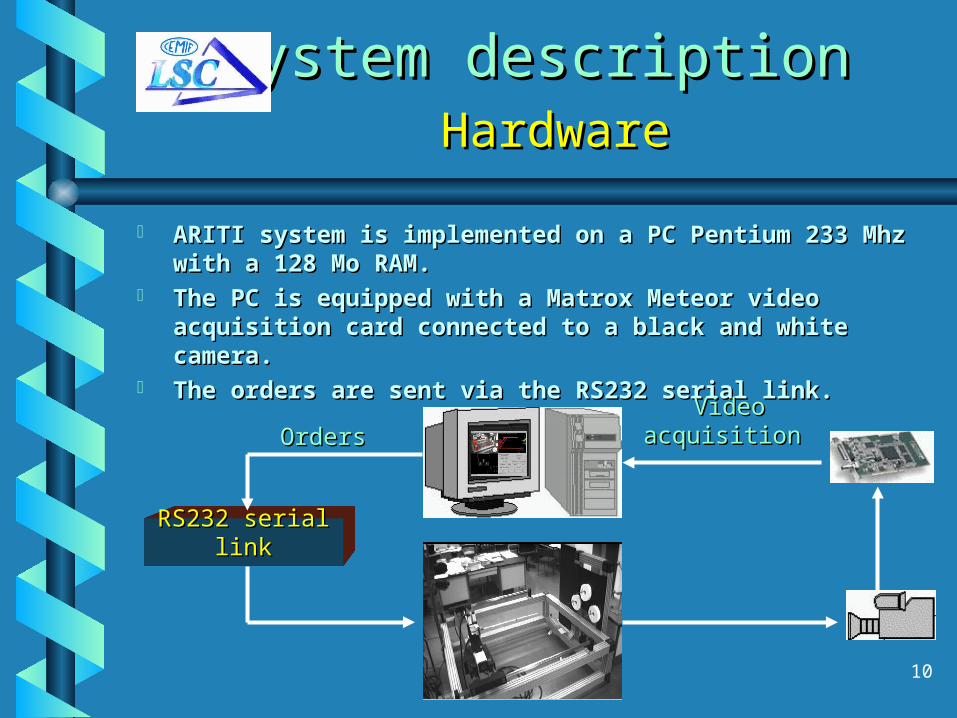
System descriptionSystem description Hardware Hardware
ARITI system is implemented on a PC Pentium 233 Mhz with a 128 ARITI system is implemented on a PC Pentium 233 Mhz with a 128 Mo RAM.Mo RAM.
The PC is equipped with a Matrox Meteor video acquisition card The PC is equipped with a Matrox Meteor video acquisition card connected to a black and white camera.connected to a black and white camera.
The orders are sent via the RS232 serial link.The orders are sent via the RS232 serial link.
RS232 serial linkRS232 serial link
OrdersOrders Video acquisitionVideo acquisition

11
System descriptionSystem description SoftwareSoftware
ARITI system is implemented under LINUX operating system.ARITI system is implemented under LINUX operating system. ARITI interface is written based on JAVA object programming ARITI interface is written based on JAVA object programming
language language Video server is written using the C standard language.Video server is written using the C standard language. Control server is written using the C and ASM (Microprocessor Control server is written using the C and ASM (Microprocessor
Assembly Language )Assembly Language )
Video ClientVideo Client
Control ClientControl Client
-ARITI- -ARITI- INTERFACEINTERFACE
Applet JAVAApplet JAVA
L I N U X - O S -L I N U X - O S -
Video serverVideo server
Control serverControl server
C and ASMC and ASM
SS
OO
KK
EE
TT
12
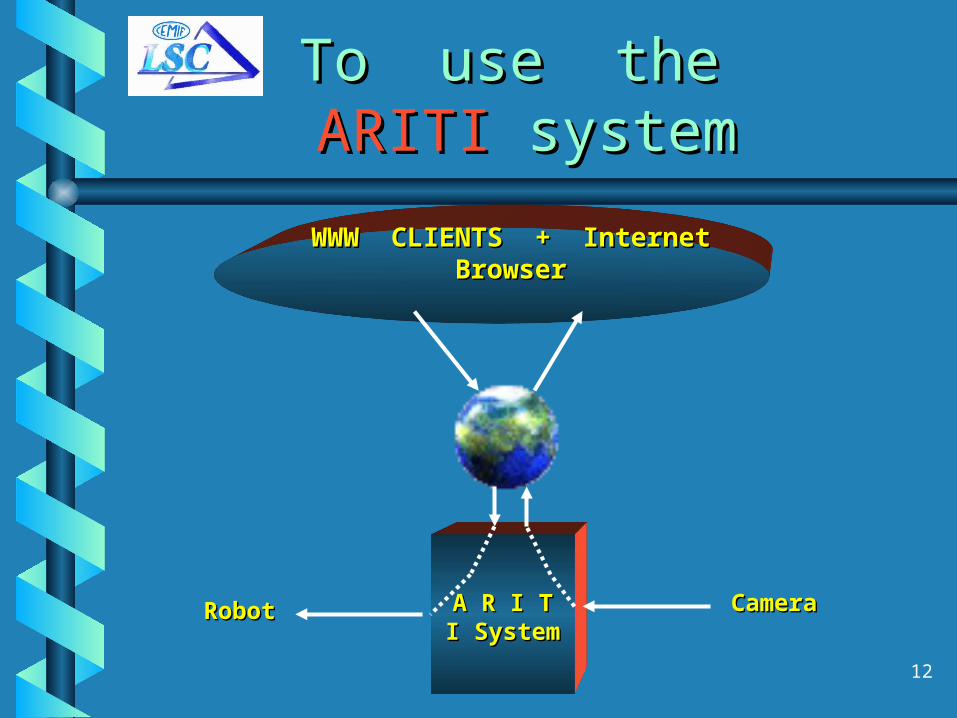
To use the To use the ARITI ARITI system system
A R I T I A R I T I SystemSystem
CameraCameraRobotRobot
WWW CLIENTS + Internet BrowserWWW CLIENTS + Internet Browser
13
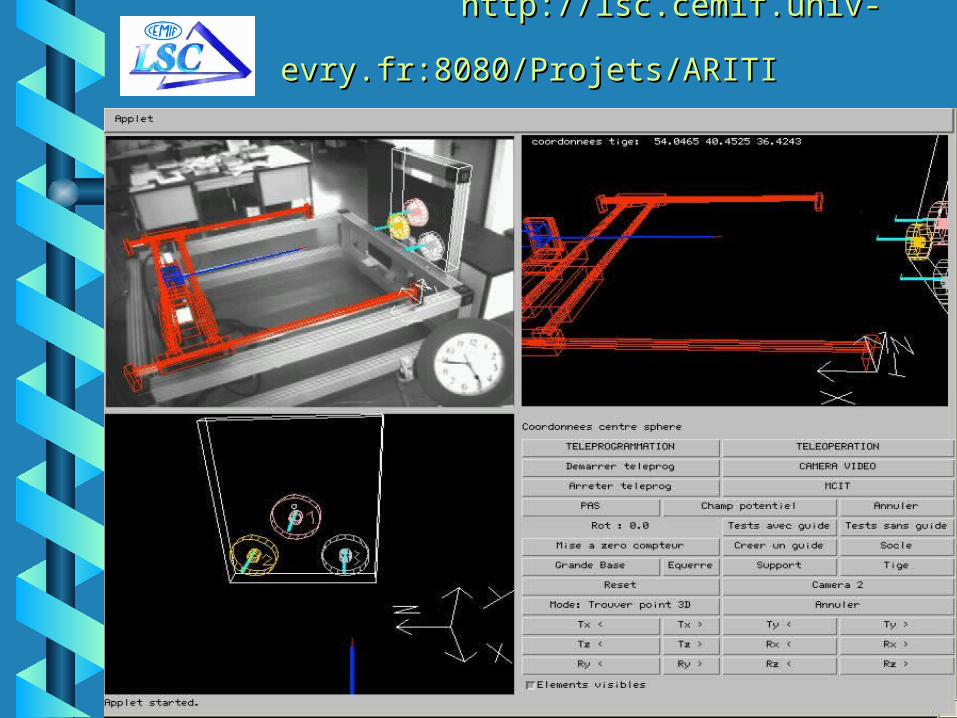
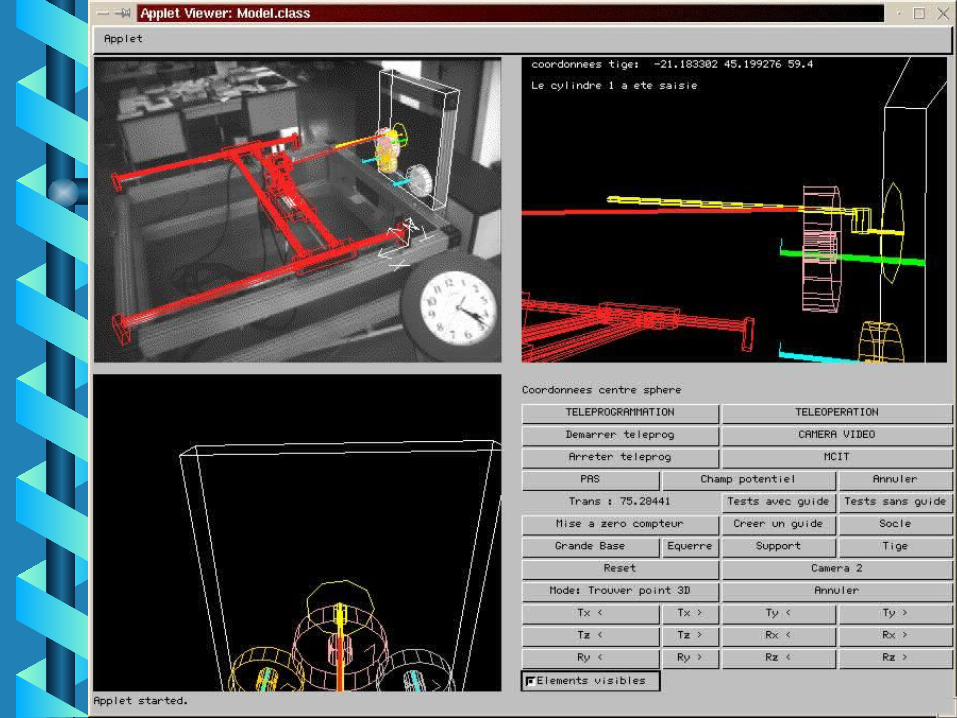
The The ARITIARITI Display Display
http://lsc.cemif.univ-evry.fr:8080/Projets/ARITIhttp://lsc.cemif.univ-evry.fr:8080/Projets/ARITI

14
Question !!Question !!
How to increase How to increase Human Human Operator performancesOperator performances to to do Telemanipulation task do Telemanipulation task
very easier ?very easier ?
15
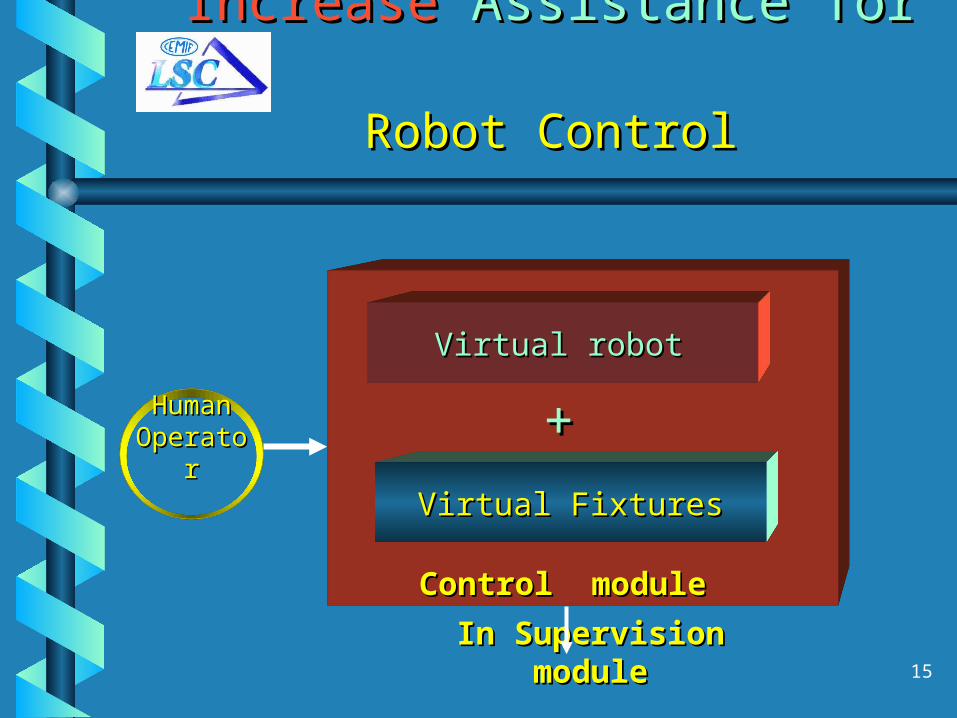
IncreaseIncrease Assistance for Assistance for Robot ControlRobot Control
Virtual robotVirtual robot
++
Virtual FixturesVirtual Fixtures
Control moduleControl module
Human Human OperatorOperator
In Supervision moduleIn Supervision module
16
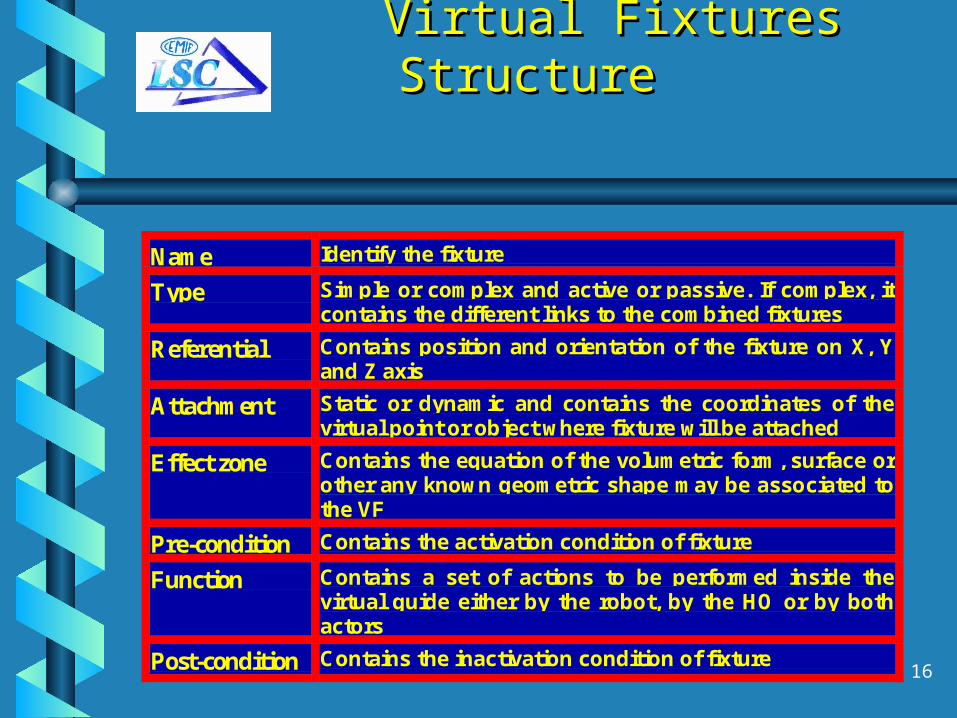
Virtual Fixtures StructureVirtual Fixtures Structure
Name Identify the fixture
Type Simple or complex and active or passive. If complex, itcontains the different links to the combined fixtures
Referential Contains position and orientation of the fixture on X, Yand Z axis
Attachment Static or dynamic and contains the coordinates of thevirtual point or object where fixture will be attached
Effect zone Contains the equation of the volumetric form, surface orother any known geometric shape may be associated tothe VF
Pre-condition Contains the activation condition of fixture
Function Contains a set of actions to be performed inside thevirtual guide either by the robot, by the HO or by bothactors
Post-condition Contains the inactivation condition of fixture

17
Simple Virtual FixturesSimple Virtual Fixtures
Human operator can create and use virtual fixtures to Human operator can create and use virtual fixtures to control the robot very easier.control the robot very easier.
Some examples of simple Virtual Fixtures (VF) :Some examples of simple Virtual Fixtures (VF) :
DiscDisc SphereSphere PlanPlan
Super-ellipsoid Super-ellipsoid ConeCone
CylinderCylinder PipePipeCube or Cube or SquareSquare
18
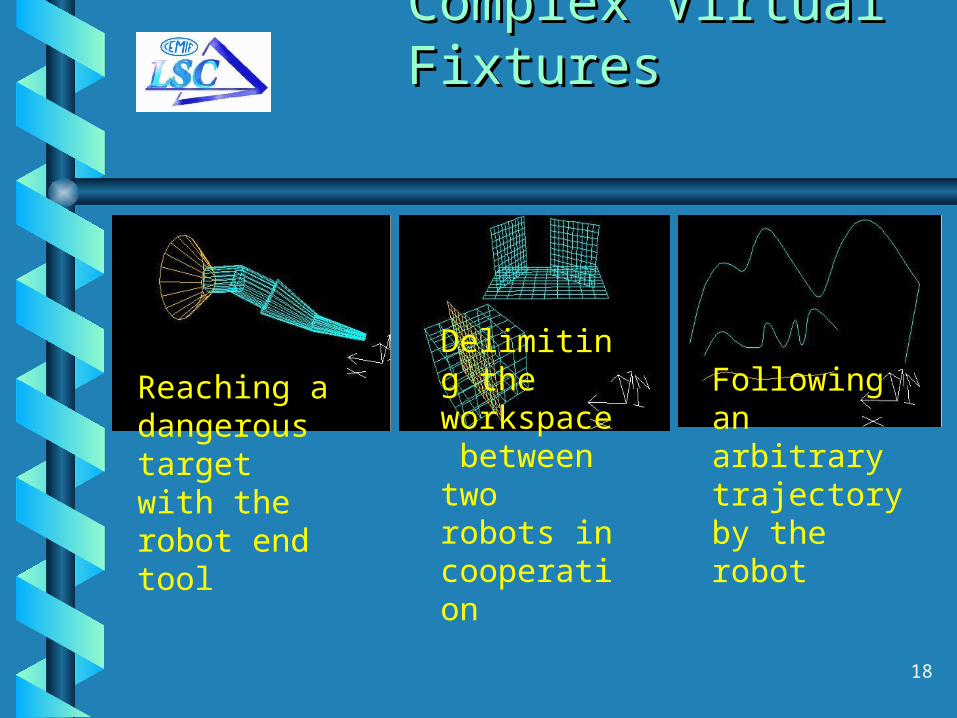
Complex Virtual FixturesComplex Virtual Fixtures
Delimiting the workspace between two robots in cooperation
Following an arbitrary trajectory by the robot
Reaching a dangerous target with the robot end tool

19
Method of Method of construction construction
taking some significant points on the surface of the guidetaking some significant points on the surface of the guide joining these points in order to get a wire frame joining these points in order to get a wire frame
representationrepresentation
Example :Example : • If a parametric equation of the guide is :If a parametric equation of the guide is :
• withwith
• Then the vertexs are :Then the vertexs are :
• And the segments are :And the segments are :

20
Manipulation onManipulation onthe screenthe screen
Use of the graphic camera model Use of the graphic camera model • Is the matrix Is the matrix MM which transform which transform point coordinates (Xo, point coordinates (Xo,
Yo, Zo ) Yo, Zo ) In the referential In the referential Ro,Ro, onto the screen point onto the screen point coordinates coordinates (U, V)(U, V) . .

21
Selection of the Selection of the 3D Fixtures on 3D Fixtures on
the screenthe screen
The designation on the screen = 2D point (U, V)The designation on the screen = 2D point (U, V) Determining what object 3D wanted to designateDetermining what object 3D wanted to designate The designated point belongs to a The designated point belongs to a DD segment, segment,
witch equation is :witch equation is :

22
Selection of the Selection of the 3D Fixtures on 3D Fixtures on
the screenthe screen
Determining what vertex on the 3D objects having Determining what vertex on the 3D objects having the smallest distance from the line segment D. the smallest distance from the line segment D.
Selected pointSelected point ScreenScreen
Selected Selected fixturefixture
23
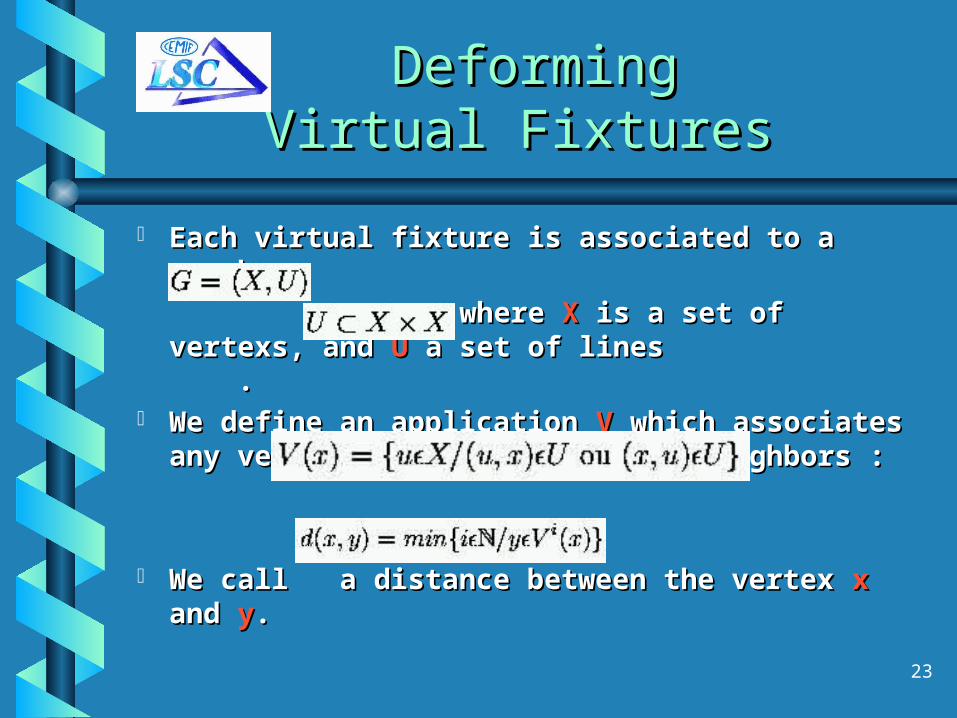
DeformingDeformingVirtual FixturesVirtual Fixtures
Each virtual fixtureEach virtual fixture is associated to a graph is associated to a graph
where where XX is a set of vertexs, and is a set of vertexs, and UU a set a set of lines .of lines .
We define an application We define an application VV which associates any which associates any vertex vertex xx in in X X a set of his neighbors :a set of his neighbors :
We call We call a distance a distance between the vertex between the vertex xx and and yy..

24
DeformingDeformingVirtual FixturesVirtual Fixtures
If If xx00 is a start point of deformation andis a start point of deformation and 0 0 the value of this deformation, the value of this deformation, Then the value of deformation of the fixture is Then the value of deformation of the fixture is
given by :given by :
Where Where pp is called is called initial propagation factorinitial propagation factor and and ff is called the is called the dissipation of propagation dissipation of propagation
factorfactor

25
DeformingDeformingVirtual FixturesVirtual Fixtures
P = 0.99, f = 0.9P = 0.99, f = 0.9P = 0.99, f = 0.99P = 0.99, f = 0.99
P = 0.99, f = 0.9P = 0.99, f = 0.9
26
Experiments Experiments
Pick and place taskPick and place taskTele-operation modeTele-operation mode Control the real robot via the virtual robotControl the real robot via the virtual robot10 human operators (HO)10 human operators (HO)3 kinds of test3 kinds of test
Without Virtual FixturesWithout Virtual Fixtures With With passivepassive Virtual FixturesVirtual Fixtures With With active (attractive)active (attractive) Virtual Fixtures Virtual Fixtures
Each HO makes 10 tests for each kindEach HO makes 10 tests for each kind
27
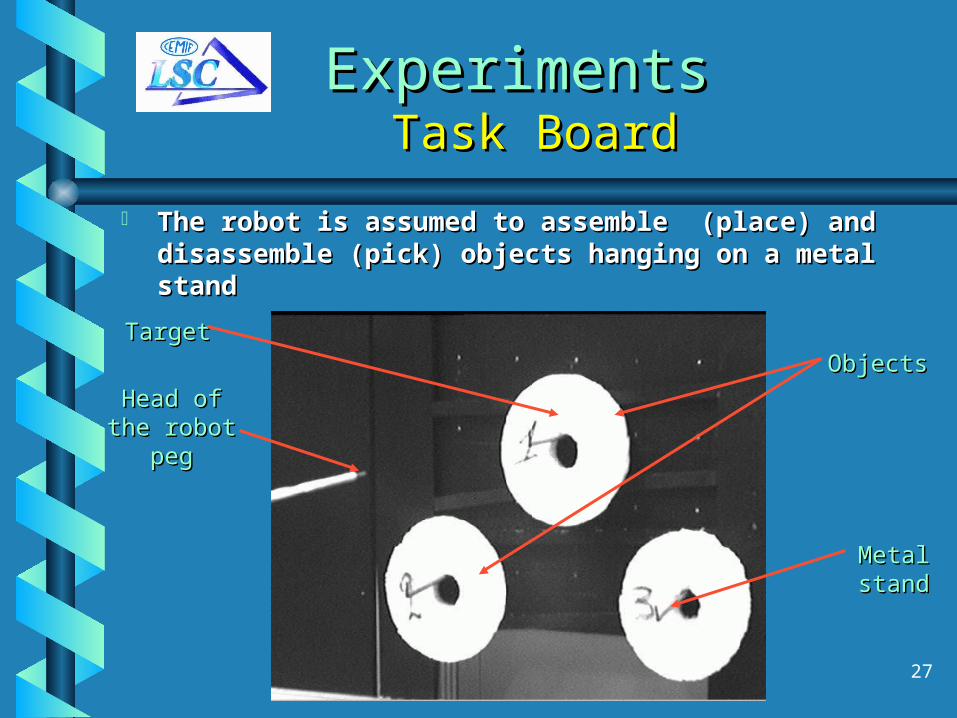
Experiments Experiments Task BoardTask Board
The robot is assumed to assemble (place) and disassemble The robot is assumed to assemble (place) and disassemble (pick) objects hanging on a metal stand(pick) objects hanging on a metal stand
ObjectsObjects
Metal Metal standstand
Head of the Head of the robot pegrobot peg
TargetTarget

28
Fixture to reachFixture to reacha targeta target
A simple geometric primitive :A simple geometric primitive :• Cone .Cone .
29
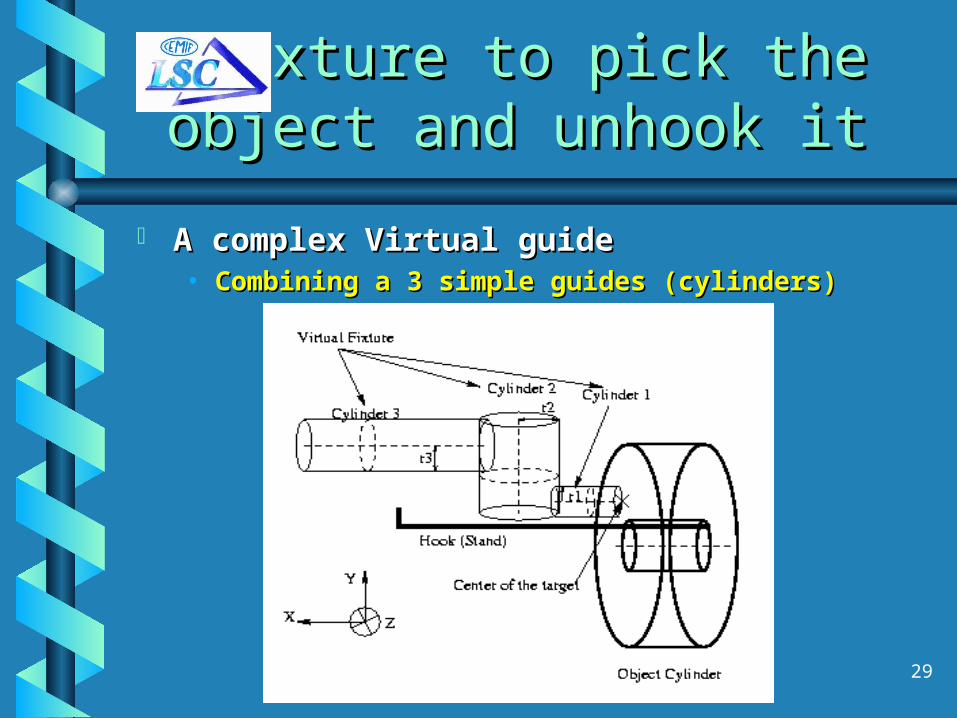
Fixture to pick theFixture to pick theobject and unhook itobject and unhook it
A complex Virtual guideA complex Virtual guide• Combining a 3 simple guides (cylinders)Combining a 3 simple guides (cylinders)
30
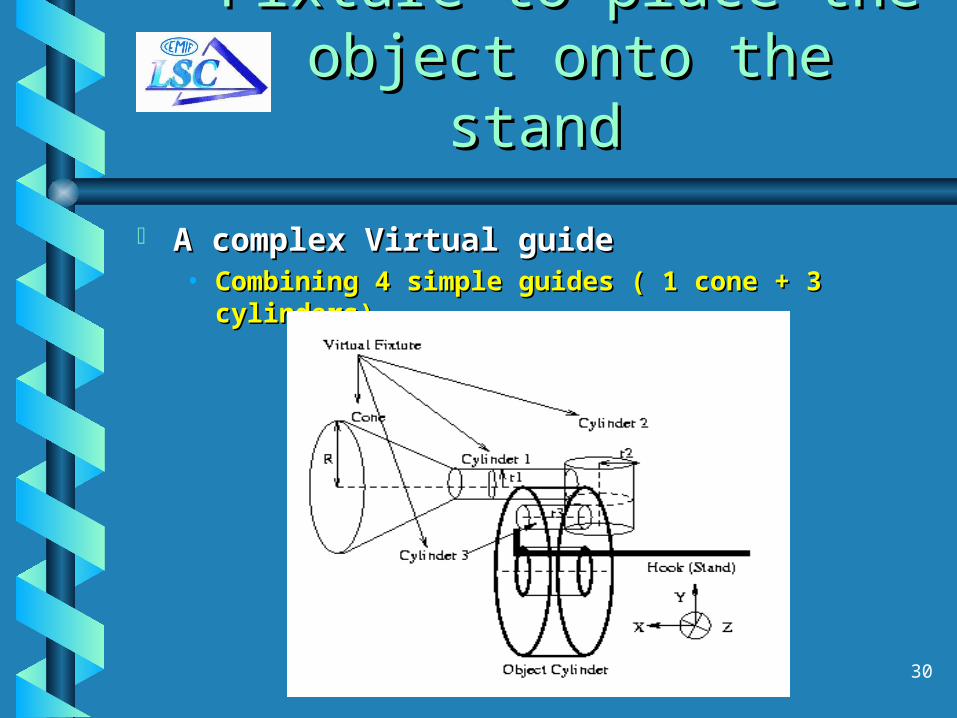
Fixture to place theFixture to place the object onto the stand object onto the stand
A complex Virtual guideA complex Virtual guide• Combining 4 simple guides ( 1 cone + 3 cylinders)Combining 4 simple guides ( 1 cone + 3 cylinders)
31
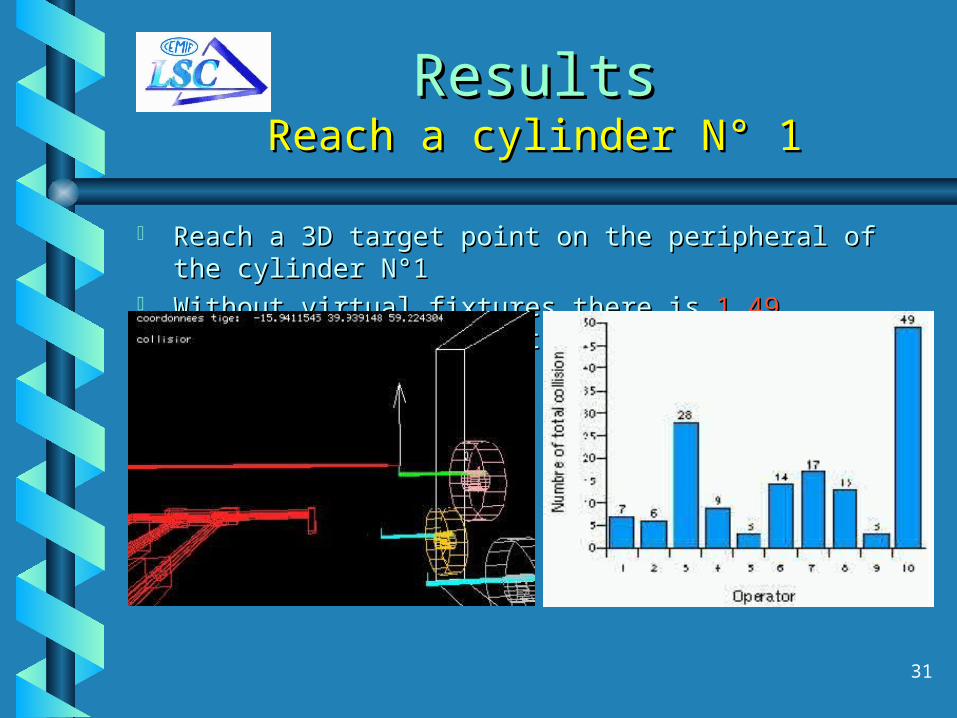
ResultsResultsReach a cylinder N° 1Reach a cylinder N° 1
Reach a 3D target point on the peripheral of the cylinder N°1Reach a 3D target point on the peripheral of the cylinder N°1 Without virtual fixtures there is Without virtual fixtures there is 1.491.49 collision for each test collision for each test

32
ResultsResultsReach a cylinder N° 1Reach a cylinder N° 1
Imprecision errors on X, Y, Z axisImprecision errors on X, Y, Z axis
Err < 0,25 mm Err < 0,25 mm with active VFswith active VFs
Average timeAverage time
7,7 sec7,7 sec with active VFs with active VFs

33
ResultsResults Pick and place a cylinder N° 1Pick and place a cylinder N° 1
- Blue - with passive VFs.- Blue - with passive VFs. - Red - with active (attractive potential fields) VFs.- Red - with active (attractive potential fields) VFs.
Unhook a cylinder N° 1 Unhook a cylinder N° 1 Passive VFs - Passive VFs - 12,78 sec12,78 sec Active VFs - Active VFs - 9,5 sec9,5 sec
Place a cylinder into the stand, Place a cylinder into the stand, Passive VFs - Passive VFs - 37,96 sec37,96 sec
Active VFs - Active VFs - 7,86 sec7,86 sec

34
35

36

37
ConclusionConclusion
Thanks to Virtual Fixtures the human operator Thanks to Virtual Fixtures the human operator performances are increased :performances are increased :
best accuracy < 0,25 mmbest accuracy < 0,25 mm best completion timebest completion time best safetybest safety
JAVA programming Language is used to JAVA programming Language is used to implement these Virtual Fixtures into the implement these Virtual Fixtures into the ARITIARITI system to :system to : Give a portable and interactive fixtures.Give a portable and interactive fixtures.

38
PerspectivesPerspectives
Use the Use the Virtual FixturesVirtual Fixtures for mobile robot application, such as for mobile robot application, such as
• Navigation, obstacles avoidance, to assist disable person.Navigation, obstacles avoidance, to assist disable person.
39
PerspectivesPerspectives
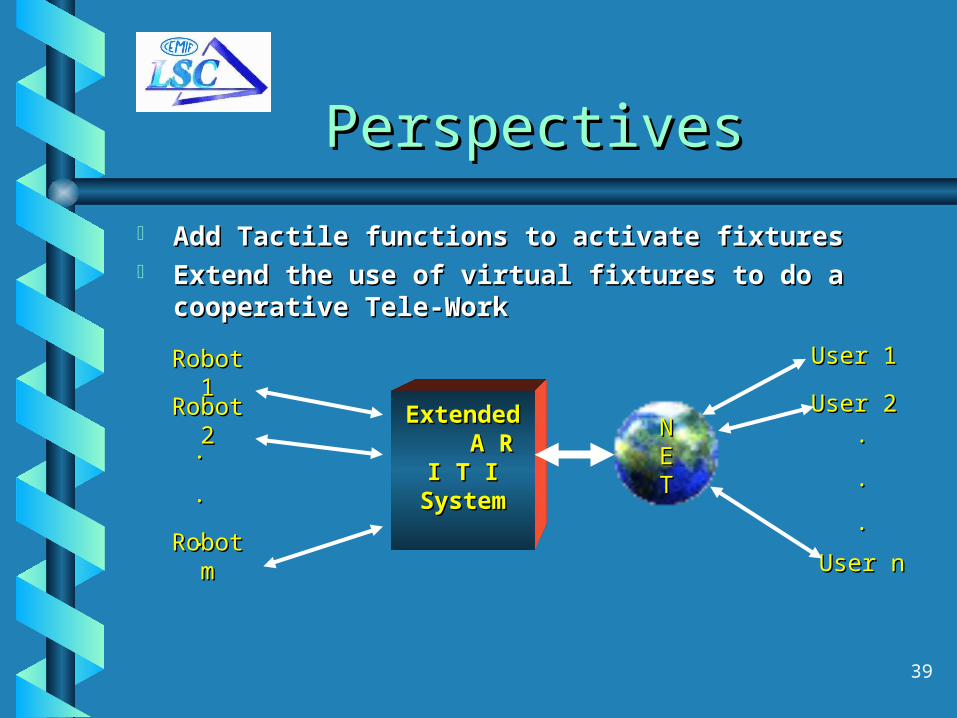
Add Tactile functions to activate fixtures Add Tactile functions to activate fixtures Extend the use of virtual fixtures to do a cooperative Tele-Extend the use of virtual fixtures to do a cooperative Tele-
WorkWork
Extended Extended A R I T I A R I T I SystemSystem
User 1User 1
User 2User 2
User nUser n
..
..
..
Robot 1Robot 1
Robot 2Robot 2
Robot mRobot m
..
..
..
N N E E TT