embeddedlab.csuohio.eduembeddedlab.csuohio.edu/bbo/proposals/simon - nsf sch... · web viewduring...
TRANSCRIPT

SCH: INT: Optimal Prosthesis Design with Energy Regeneration
The goals of this research include: (1) modeling human motion control; (2) inventing new concepts in energy regeneration; and (3) integrating the results into a fundamentally new approach to prosthesis design. We will demonstrate our results with transfemoral prosthesis design, prototype development, and evaluation with robotic and human trials. The team of Cleveland State University (musculoskeletal modeling, control, optimization, robotics, embedded systems) and the Veterans Affairs Medical Center (human gait studies, prosthesis expertise) combines a wealth of theoretical and applied expertise to make this research feasible. This research builds bridges across the boundaries of mechanical design, controls, computer intelligence, embedded systems, robotics, biomedical engineering, and medical practice.
Proposal Outline PageSection 1 – Introduction, Research Goals, and Research Objectives...........................................................1Section 2 – Related Research ......................................................................................................................2Section 3 – Proposed Research.....................................................................................................................4Section 4 Evaluation Plan........................................................................................................................12Section 5 – Under-Represented Groups.....................................................................................................13Section 6 – Dissemination of Research Results.........................................................................................14Section 7 – Broader Impacts.......................................................................................................................14Section 8 – Investigators’ Prior Research..................................................................................................15
1. Introduction, Research Goals, and Research Objectives
Biological Motivation for Human Control Modeling and for Ankle/Knee Energy TransferTransfemoral (above-knee) amputees consume 30-50% more metabolic energy than able-bodied individuals [Gitter, 1995], despite the fact that amputees have fewer muscles. This implies large differences in function between prosthetic and natural limbs, requiring human adaptation that is energetically costly. Also, mechanical stress is also increased in amputees, leading to overuse injuries and osteoarthritis [Struyf, 2009]. Microprocessor knees such as the C-Leg (Otto Bock, Germany) and Rheo Knee (Ossur, Iceland) only reduce energy cost by 3-5% compared to conventional passive knees [Johansson, 2005]. We suggest that these modern knees do not solve the problem because they are essentially controlled dampers that cannot generate positive work. Also, these knees are typically used with a spring-like ankle that does not provide active push-off. Fully active knees and ankles with torque motors are becoming available (Highsmith, 2010a; Sup, 2008; Eilenberg, 2010), but such devices consume substantial amounts of power, requiring a trade-off between battery mass and operating time.
An elegant solution to this problem is offered by considering power generation/absorption during walking [Winter, 1983]. The knee and ankle both have phases of both positive and negative work during gait. During level walking and slow running, the knee absorbs an amount of energy that is greater than that required by the ankle [Farris, 2011]. So a well-designed integrated prosthetic limb should be able to operate without external energy, if it has the ability to redistribute energy between ankle and knee, and store energy during periods of negative work for later use.
Control of existing active prosthetic limbs has been primarily based on the restoration of able-bodied gait mechanics (joint rotations and joint torques). There has not been much consideration of restoring able-bodied control, that is, how joint torques respond to perturbations, except for ad-hoc strategies to prevent stumbling and buckling. Consequently, prosthetic limbs do not contribute to stability, and this requires compensatory behavior in the healthy limb.
In this research, we propose system identification of able-bodied human control laws and implementation of those laws into our integrated prosthetic system, to make it respond to perturbations as a natural limb would. Our research goals are summarized as follows.
Simon et al. Page 1 of 16 Optimal Prosthesis Design …

Goal 1: Human control modeling We aim to model human control using a combination of global and local optimization methods, and using able-bodied and amputee gait data. This will enable us to design prosthesis controllers that mimic human control at both the knee and ankle.
Goal 2: New concepts in energy regeneration We aim to design a prosthetic system that harvests energy at the knee and stores it for later use by the knee and ankle. This will significantly increase the effective range of prostheses, require less frequent battery charging, and provide greater flexibility and performance for prosthesis users.
Goal 3: New prosthesis design We aim to develop a new prosthesis design that promises greater flexibility and fewer adverse side effects than current prostheses.
Objectives: To achieve the high-level goals listed above, we propose the following specific objectives. These objectives are discussed in detail in Section 3 of this proposal.
Objective 1: Able-Bodied and Amputee Movement Studies Our first objective is to collect 3D gait data on able-bodied and amputee subjects who are representative of the characteristics of transfemoral amputees, covering the typical activities of daily living encountered by prosthesis users. This will provide us with performance specifications for our design efforts, and with data for bench testing of prosthetic limb prototypes. We will also make this data available to other researchers.
Objective 2: Human Control Modeling We will perform a parametric optimization of an engineered control system with the goal of reproducing human motor control behavior. This will be done for progressively more complex candidate architectures for the control and actuation systems.
Objective 3: Prosthesis Design Framework We will develop a framework that can be used to generate alternative prosthesis designs. The framework will include motors/generators at both the knee and ankle joints with energy storage and regeneration. Objective 5 below will be used to generate prosthesis designs with desired characteristics.
Objective 4: Prosthesis Control The proposed prosthesis control system will have a hierarchical structure with low-level controllers, passive interconnection modes, and supervisory switching control. We will build on existing theory for hybrid dynamic systems accounting for stability, robustness, and performance. Objective 5 below will be used to generate prosthesis controllers.
Objective 5: Multi-Objective Optimization We propose to optimize the design and control of our prosthesis using a novel biogeography-based evolutionary approach. The optimization of the hardware and control systems are not independent, but form an integrated optimization problem. In addition, the optimization is multi-objective, including the objectives of regeneration efficiency, financial cost, size, weight, system performance, system robustness, etc.
Objective 6: Prosthesis Prototype Fabrication and Test We propose to fabricate and test a prosthesis prototype. Testing will take place on CSU’s hip robot (see Section 2.4). Test results will not only feed back into our simulation software, but will also provide us with confidence to move to our final objective: human trials.
Objective 7: Human Trials We propose to conduct gait studies on transfemoral amputees using our prototype prosthesis. These trials will be clinical feasibility studies and will provide a proof of concept for our design framework.
2. Related Research
2.1 Prosthesis Design – The number of diagnosed diabetic adults tripled between 1980 and 2005, and one-third of Americans may be diabetic by 2050 [CDC, 2010]. Most transfemoral amputations result from diabetes [CDC, 2011]. In 2010, over 350,000 persons in the US had a transfemoral amputation [Highsmith, 2010b]. Improved care has reduced the rate of many amputations, but the rate of transfemoral amputations is almost constant [CDC, 2006]. The prevention of death from diabetes may result in more patients with serious, non-fatal consequences. Making such patients more sedentary via inadequate
Simon et al. Page 2 of 16 Optimal Prosthesis Design …

prostheses not only reduces quality of life, but accelerates negative sequelae. For example, abnormal gait contributes to spinal issues [Kulkarni 2005; Gailey 2008; Modan, 1998]. Despite manufacturer claims, current prostheses do not restore normal gait [Johansson, 2005; Chin, 2006; Bellmann, 2010]. The most similar technology to our proposed prosthesis is the one developed at Vanderbilt University [Sup, 2008, 2009; Varol, 2008]. Like them, we aim to develop an integrated prosthesis that provides power at both ankle and knee. In addition, we aim to develop a human control-based framework for optimal prosthesis design that includes multi-objective optimization and energy regeneration. The most tangible benefit of our research will be a new prosthetic knee. Our prosthesis is different from current technology in that it involves coordination between the knee and ankle, and energy regeneration. Our design method is novel in its use of musculo-skeletal simulations based on experimental data, combined with hardware models.
2.2 Human Motor ControlHuman motor control is hierarchical, with high level commands generated by the brain, and low level feedback in the spinal cord. While there are simple circuits such as stretch reflexes that primarily involve a sensor (muscle spindle) co-located with an actuator (muscle fibers), the system generally operates as a multi-input multi-output neural network. One well known aspect of gait control is reflex modulation [Zehr, 1999], which results in high feedback gains when the limb is in stance, and low feedback gains when in swing. This prevents knee buckling in stance while still allowing for efficient passive motion in swing. Fundamentally this points to the need for nonlinear control where the gain from one sensor (e.g., muscle spindle) depends on the signal from another sensor (e.g., cutaneous receptors under the foot).
The prevailing concept for control of motorized prosthetic limbs is linear feedback [Sup, 2008]. Gait is divided into discrete phases by a finite state machine, and feedback gains vary between phases, replicating reflex modulation. However, to date there has been no attempt to do nonlinear control or to control multiple joints with multiple sensors and a single MIMO controller. Furthermore, there has been no attempt to determine which controller parameters are required to replicate the control of a natural limb. While there is plenty of data on the mechanics of human movement, there is far less insight into control.
Control can be identified by introducing perturbations [van der Kooij, 2005]. Experiments have been designed in which one joint angle is perturbed, and resulting muscle torques recorded [Zehr, 1999]. In this proposed research, we use the same concept but use parameter estimation. The human subject will be perturbed by movements of the walking surface, while resulting changes in joint torques are recorded to allow identification of control parameters. This is very different from “average normal gait cycle,” which is commonly used as a basis for prosthetic control, and which contains information about mechanics only (not control).
2.3 CSU’s Hydraulic Prosthesis CSU, in collaboration with the Cleveland Clinic, has recently developed a hydraulic prosthetic knee for transfemoral amputees [van den Bogert, 2012; Wilmot, 2013; Thomas, 2013]. The knee is controlled with evolutionary algorithms and neural networks. The prosthesis harvests energy and provides controlled release of energy with a spring-loaded high pressure hydraulic chamber, a low pressure chamber, and a rotary actuator. The semi-active nature of the prosthesis allows the device to use less power and operate at a quieter noise level than its fully active counterparts, and to have better gait performance than passive prostheses. A prototype has been developed and tested on CSU’s hip robot (see Section 2.4). Although we have seen success in our hydraulic prosthesis work, our experience indicates that the electromechanical approach in this research proposal will provide cleaner and more flexible actuation than hydraulics.
2.4 CSU’s Hip RobotPrototype testing is a mandatory component of research programs that develop commercially viable prostheses. Tests involving human patients is problematic. Informed consent, safety harnesses, and lack of repeatability across test subjects inhibit useful data gathering. Robotic testing of prostheses can remove these obstacles and provide additional benefits. Robots can be operated under conditions that are unsafe for patients, such as near-fall situations. A robot can be operated continuously for long periods of time, as
Simon et al. Page 3 of 16 Optimal Prosthesis Design …
required for optimization of prosthetic control algorithms. Also, robots can be fitted with sensors to measure quantities that are difficult to measure directly in a human subject, such as hip torque and angle.
Our team has developed a robotic hip simulator with two degrees of freedom (DOF): thigh swing and vertical hip displacement. The robot allows us to attach any prosthesis and apply motion profiles to each DOF. The prosthesis walks or runs on a treadmill as the robot controller achieves motion profile tracking. The robot allows ground reaction forces up to 1200 N, and its real-time interface can be programmed via dSPACE. Motion control is achieved using sliding mode [Richter, 2012] and robust passivity-based control [Richter, 2013], and ground reaction tracking and impedance control mode are currently being implemented [Davis, 2013]. This infrastructure will play a key role in our research, which involves standalone tests and comparison studies against commercial prostheses (see Section 4.1).
2.5 Energy Management and Regeneration“Energy regeneration” and “regenerative braking” denote the conversion of mechanical to electric energy to reduce vehicle speed. In traditional regenerative braking, converted electric energy is dissipated as heat, providing a means to bring machinery to a quick stop. Energy regeneration, in contrast, is intended to store and reuse converted energy. Batteries have been the traditional means for energy storage since regeneration became commonplace in electric vehicles. When batteries and associated electronics are used, storage efficiencies are typically close to 20%. Manufacturers still implement regeneration despite this low efficiency. This is due to the large absolute levels of kinetic energy involved in electric vehicles.
Despite progress in battery energy density and internal resistance, regeneration systems based on batteries alone lose practical value as power levels decrease. The rate at which mechanical energy must be transferred for effective deceleration is higher than the rate at which batteries can store energy; that is, batteries have small power densities. Power conversion is traditionally handled by electronics that dissipate unstorable energy as heat. At small power scales, the net energy that can be stored may be too small to justify the complexity and cost of regeneration. On the other hand, ultracapacitor technology has made rapid progress in the last few years. Ultracapacitors have power transfer characteristics that are the opposite of batteries: they store small amounts of energy at fast rates. Ultracapacitors have small energy densities but large power densities. Our energy regeneration in this research proposal is inspired by the implementation of regeneration involving batteries and ultracapacitors in electric vehicles, where storage and return efficiencies as high as 84% and 87% have been demonstrated [Dixon, 2002]. Mazda has introduced supercapacitor-assisted regeneration in the Mazda6 car [Weissler, 2013]. At a smaller power scale, an MIT group has also demonstrated the benefits of combining ultracapacitors and batteries [MITcapcar, 2013].
Our preliminary studies indicate that energy regeneration in electromechanical prostheses is not only feasible, but advantageous. The few reported attempts at regeneration in a transfemoral prosthesis were confined to the traditional battery and pulse-width modulated converter configuration [Tucker, 2010; Tabor, 1988]. Small efficiencies (18% for the former, 30% for the latter) were achieved in practice.
Preliminary studies (Section 3.3) show that interconnection of electromechanical conversion element, mechanical transformer (e.g., gears), spring, and ultracapacitor can achieve energy regeneration while approximating a desired mechanical impedance. In this proposed research, prosthesis capacitance will be tailored to the torque/speed characteristics of each phase of physical activity where power is available for regeneration. In phases requiring positive power, power can be delivered by the battery or supercapacitors. Adding passive configurations to the conventional four-quadrant PWM setup will result in significant increases in storage efficiency improvements in prosthesis operating times between charges.
3. Proposed Research
3.1 Able-Bodied and Amputee Movement StudiesOur first objective is to collect 3D joint angles and joint torques in transfemoral amputees and able-bodied control subjects performing a variety of tasks. This work will be performed in the Motion Studies
Simon et al. Page 4 of 16 Optimal Prosthesis Design …
Figure 1 The position of skin-mounted reflective markers on each subject will be collected. Marker coordinates will be calculated and a model constructed.
Figure 2 V-Gait system for human testing.
Laboratory (MSL) of the Cleveland Department of Veterans Affairs Medical Center (VAMC). This phase of the project will result in: (1) mechanical performance requirements for prosthetic limb design; and (2) data on thigh translation and rotation to drive the robotic testing of our prosthetic limb prototype (see Section 4.1). We will also make this gait study data available on our project web site to other researchers.
Ten amputees will be recruited: five users of the C-Leg (active prosthesis), and five users of the Mauch SNS (passive prosthesis). Also, five able-bodied control subjects will be recruited. The number of subjects is a tradeoff based on previous MSL gait study experience. A 3D model will be constructed from 47 reflective markers placed on the subject (Figure 1). Data will be collected at three walking speeds on level ground [Winter, 2009]; up and down a 10-degree ramp; stepping up and down stairs; and sitting in, and rising from, an armless chair. All of the subjects will walk on the treadmill at their preferred speed following a period of accommodation. During walking, 60 seconds of kinetic and kinematic data will be collected. Detailed methods and sample results can be found [van den Bogert, 2013].
An ensemble average (±1 SD) will be calculated for each kinematic and kinetic degree of freedom across ten random stride cycles. For stepping up and down stairs, and sitting and rising, we will also collect 10 repetitions and ensemble averages of each activity. The kinematic data include hip height, center of mass displacement, pelvic tilt, hip, knee and ankle angles and toe clearance. The kinetic data include ground reaction forces, and hip, knee, and ankle moments and powers. We will record patient height, weight, limb lengths, and medical history.
3.2 Human Control ModelingThis task will led by Dr. van den Bogert at Cleveland State University. The approach we will use to design a prosthetic controller is inspired by system identification, but we will not attempt to identify the human control system with all its complexity. Rather, we will perform a parametric optimization of an engineered control system with the goal of reproducing human control behavior. This will be done for progressively more complex candidate architectures for the control and actuation systems.
Why two gait study labs? Note that the VA motion studies in Section 3.1 are for: (1) mechanical performance requirements for prosthetic limb design; and (2) data on thigh translation and rotation for robotic testing of our prosthetic limb. The VA Motion Studies Laboratory is needed for this task because of their experience with amputee subjects and their ability to recruit them via the prosthetic clinic. On the other hand, the CSU gait study described here includes perturbations for human motion control identification. The V-Gait system at CSU has the capability to induce controlled surface perturbations during human testing, and this is not possible at the VA Motion Studies Lab.
To estimate human control parameters, we need a rich enough data set for robust identification. CSU is equipped to acquire such data. The V-Gait system (Motek Medical, Netherlands – see Figure 2) consists of an instrumented treadmill that measures full 6-axis loads under each foot. The treadmill assembly is mounted on a motion base that can produce controlled medio-lateral translations
Simon et al. Page 5 of 16 Optimal Prosthesis Design …
and uphill-downhill pitch. The speed of the two belts can be varied to induce high-bandwidth anterior-posterior perturbations. We are currently working on an accelerometer system that allows us to compensate the 6-axis force plate data for inertial effects of the treadmill mass. This will allow us to get reliable ground reaction forces in these conditions, which is needed for the inverse dynamic analysis that produces joint torques.
Ten able-bodied subjects will be recruited and screened for ability to walk and run (up to 3 m/s). There is increasing demand for a prosthetic limb with running capabilities from veterans and others who were young and active when they lost their limb. Each subject will be fitted with the standard 47 reflective markers for the Human Body Model (HBM) software that calculates kinematics and joint torques [van den Bogert, 2013]. Each subject will be tested on the treadmill in five conditions: walking at slow, normal, and fast speeds (0.8, 1.2, and 1.6 m/s), and running at slow and normal speeds (2.5 m/s, 3 m/s). Each test has no random perturbations for the first 30 seconds, after which random perturbations will be applied. Lower extremity kinematics and joint torques are collected at 100 Hz, resulting in a total of 57,000 samples of full body kinematic and kinetic data that can be used for parameter optimization.
Human control parameter optimization requires a model for the prosthetic sensor system so we can calculate the sensor signals that the prosthesis would see if it experienced the same movement as the human. It also requires a model of the prosthetic control system, with parameters such as gains or weights that can be optimized. Finally, it requires a model of prosthetic actuation and energy management. Once these models are defined, the optimization problem is a linear or nonlinear least-squares problem, with the aim to obtain knee and ankle joint that are close to the torques that the human produced during the same movements. This optimization can not be done on a single gait cycle, but must be done on the full set of 57,000 samples to ensure that the human control behavior is fully captured by the prosthetic system.
For optimization, we will use two algorithms. Biogeography-based optimization [Simon, 2008] will be used for global optimization, followed by gradient-based Levenberg-Marquardt nonlinear least-squares [Press, 2007] for local optimization. We already have implemented this to estimate skeleton kinematics from marker trajectories [van den Bogert, 2013]. We plan to do parameter optimization for the following architectures. In later stages we may adjust this plan as we learn more about what is feasible.1. Single-joint proportional-derivative control. Sensor system: angle and angular velocity at knee and
ankle. Control system: Single-joint proportional-derivative control, with feedback gains and setpoints parameterized at 5% intervals in the gait cycle. This is an estimation problem for 120 controller parameters (2 joints, 3 parameters, 20 time points). Actuation system: torque motors. This is essentially the same architecture as used for the Vanderbilt powered knee [Sup, 2008], but the phase-dependent feedback gains in our proposed research come from human data.
2. Multi-joint proportional-derivative control. This is identical to the previous architecture, but the control system includes feedback between joints.
3. Multi-joint neural network. This is identical to the previous architecture, but the control system is a nonlinear network rather than a linear network. The number of parameters depends on the number of hidden layer neurons. This nonlinear architecture offers an opportunity to have parameters that do not explicitly depend on time, which eliminates the need for a controller clock or finite state machine.
4. Multi-joint neural network with additional sensors. This is identical to the previous architecture, but other sensors are included in addition to the two angles and two angular velocities. The network will have more inputs and more parameters. Candidate sensors are: foot contact pressure, and acceleration at thigh or upper body. An upper body sensor would mimic human balance organs. While this may help the system mimic human behavior, it has the disadvantage of a wireless connection between sensor and prosthetic limb. This may be acceptable if it results in superior performance. Foot pressure sensors could introduce reflex modulation and improve the agreement with human data because we expect reflex modulation to occur during the tests.
5. Multi-joint neural network with energy management and actuation. At this point we will connect to the design and modeling of an actuation system that includes energy management (see Section 3.3). The controller now no longer directly controls joint torques. Control signals enter the electronics, and the circuit and motor dynamics cause torques to be generated. The controller must also control the
Simon et al. Page 6 of 16 Optimal Prosthesis Design …
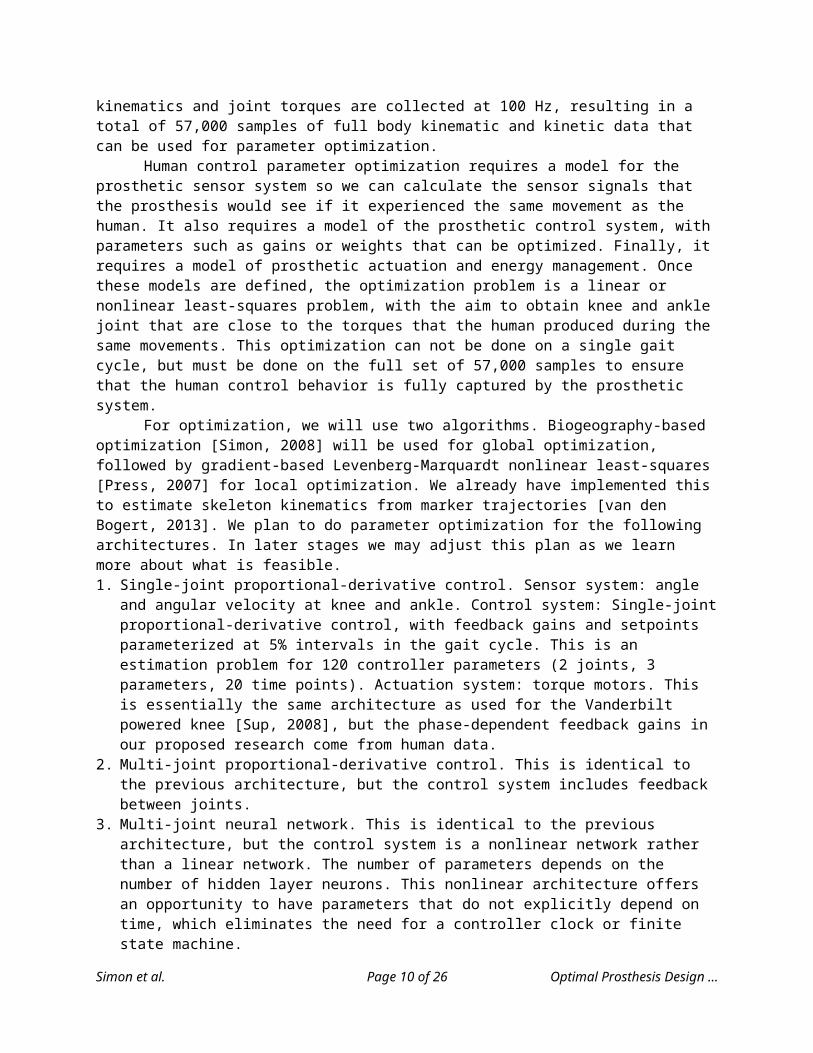
Figure 3 Human motion control modeling during human standing, showing good agreement between human torques and controller torques during random perturbations.
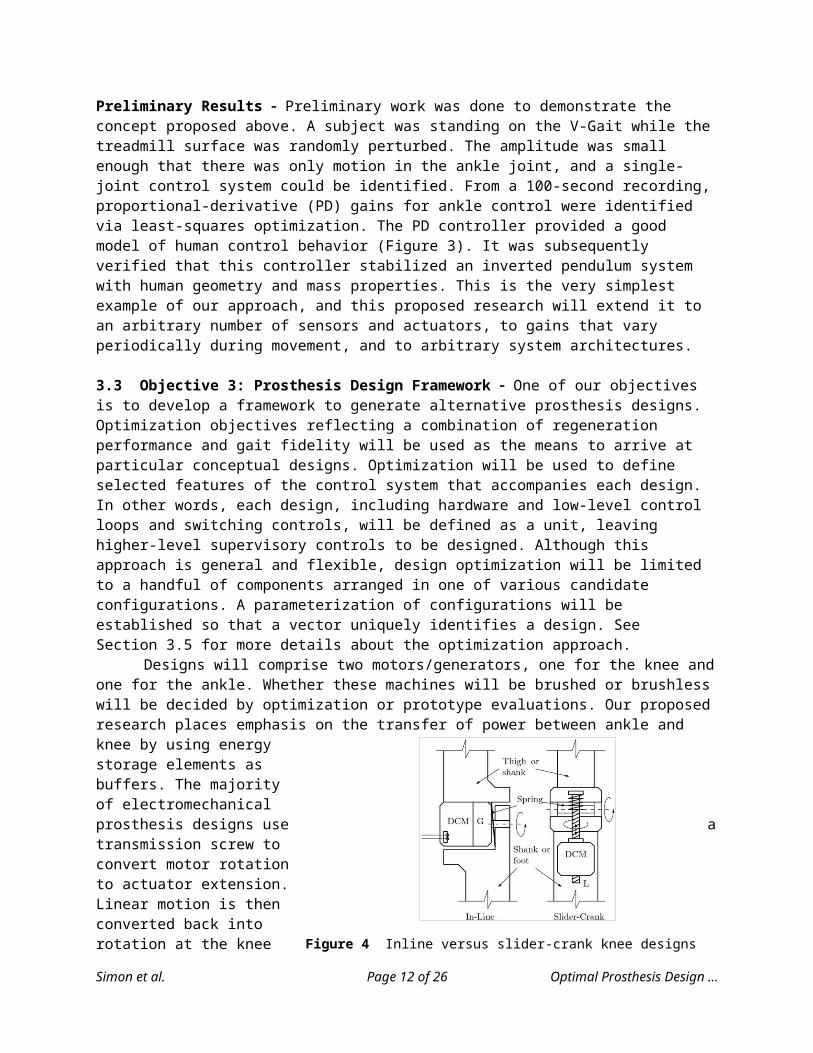
Figure 4 Inline versus slider-crank knee designs
energy management system via a matrix switch. Controller parameter optimization proceeds as before. The multi-objective optimization cost function will include an energy cost term.
Controllers developed for cases 14 are directly applicable to any existing powered prosthetic limb system. Case 5 is where we introduce our novel actuation and energy management system. At this point we will have sufficient experience with the approach to make good decisions for an appropriate controller architecture and an appropriate set of sensors to control that system.
Preliminary Results Preliminary work was done to demonstrate the concept proposed above. A subject was standing on the V-Gait while the treadmill surface was randomly perturbed. The amplitude was small enough that there was only motion in the ankle joint, and a single-joint control system could be identified. From a 100-second recording, proportional-derivative (PD) gains for ankle control were identified via least-squares optimization. The PD controller provided a good model of human control behavior (Figure 3). It was subsequently verified that this controller stabilized an inverted pendulum system with human geometry and mass properties. This is the very simplest example of our approach, and this proposed research will extend it to an arbitrary number of sensors and actuators, to gains that vary periodically during movement, and to arbitrary system architectures.
3.3 Objective 3: Prosthesis Design Framework One of our objectives is to develop a framework to generate alternative prosthesis designs. Optimization objectives reflecting a combination of regeneration performance and gait fidelity will be used as the means to arrive at particular conceptual designs. Optimization will be used to define selected features of the control system that accompanies each design. In other words, each design, including hardware and low-level control loops and switching controls, will be defined as a unit, leaving higher-level supervisory controls to be designed. Although this approach is general and flexible, design optimization will be limited to a handful of components arranged in one of various candidate configurations. A parameterization of configurations will be established so that a vector uniquely identifies a design. See Section 3.5 for more details about the optimization approach.
Designs will comprise two motors/generators, one for the knee and one for the ankle. Whether these machines will be brushed or brushless will be decided by optimization or prototype evaluations. Our proposed research places emphasis on the transfer of power between ankle and knee by using energy storage elements as buffers. The majority of electromechanical prosthesis designs use a transmission screw to convert motor rotation to actuator extension. Linear motion is then converted back into rotation at the knee by virtue of the slider-crank. While this design is back-driveable and
Simon et al. Page 7 of 16 Optimal Prosthesis Design …
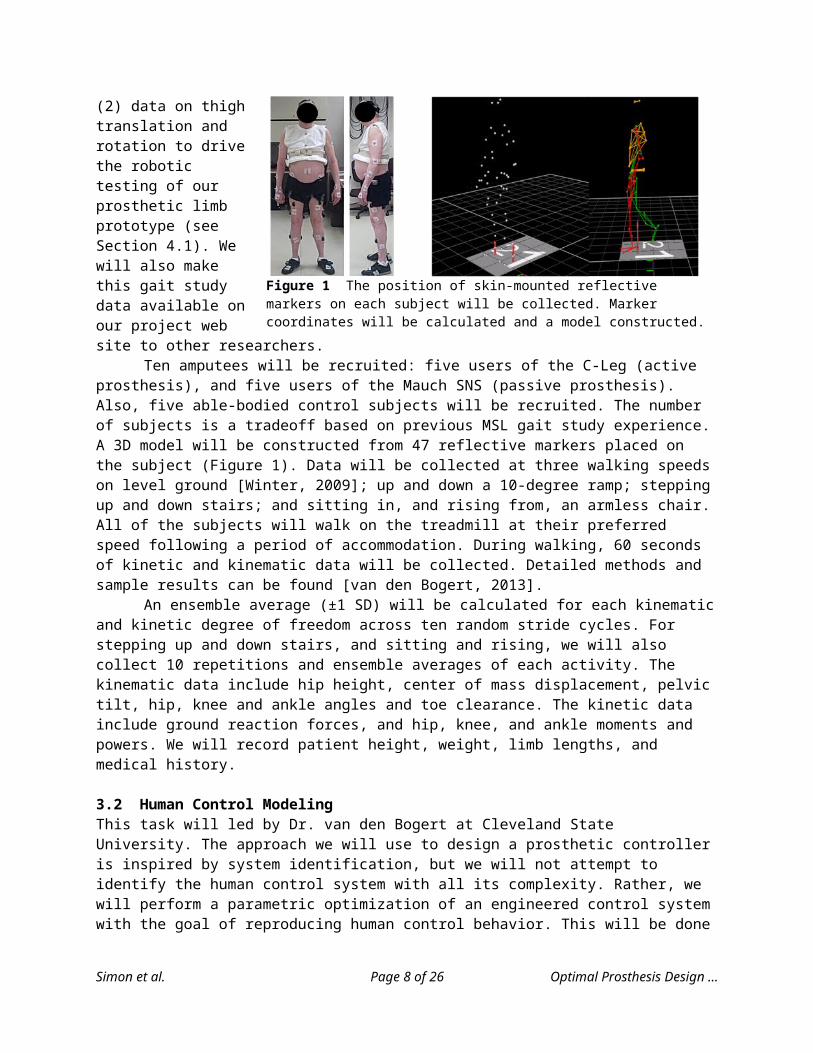
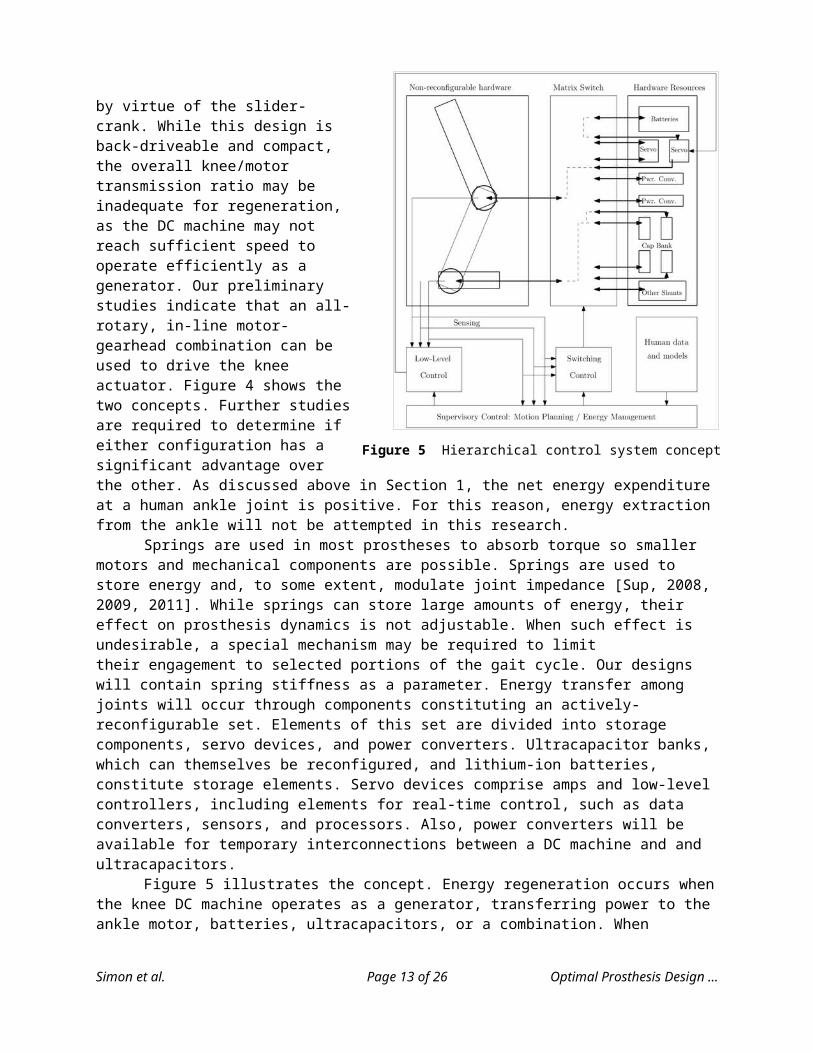
Figure 5 Hierarchical control system concept
Figure 6 Configuration used in preliminary study
compact, the overall knee/motor transmission ratio may be inadequate for regeneration, as the DC machine may not reach sufficient speed to operate efficiently as a generator. Our preliminary studies indicate that an all-rotary, in-line motor-gearhead combination can be used to drive the knee actuator. Figure 4 shows the two concepts. Further studies are required to determine if either configuration has a significant advantage over the other. As discussed above in Section 1, the net energy expenditure at a human ankle joint is positive. For this reason, energy extraction from the ankle will not be attempted in this research.
Springs are used in most prostheses to absorb torque so smaller motors and mechanical components are possible. Springs are used to store energy and, to some extent, modulate joint impedance [Sup, 2008, 2009, 2011]. While springs can store large amounts of energy, their effect on prosthesis dynamics is not adjustable. When such effect is undesirable, a special mechanism may be required to limit their engagement to selected portions of the gait cycle. Our designs will contain spring stiffness as a parameter. Energy transfer among joints will occur through components constituting an actively-reconfigurable set. Elements of this set are divided into storage components, servo devices, and power converters. Ultracapacitor banks, which can themselves be reconfigured, and lithium-ion batteries, constitute storage elements. Servo devices comprise amps and low-level controllers, including elements for real-time control, such as data converters, sensors, and processors. Also, power converters will be available for temporary interconnections between a DC machine and and ultracapacitors.
Figure 5 illustrates the concept. Energy regeneration occurs when the knee DC machine operates as a generator, transferring power to the ankle motor, batteries, ultracapacitors, or a combination. When traditional motion control is the operation mode, the servo amps return energy to the batteries.
Simon et al. Page 8 of 16 Optimal Prosthesis Design …
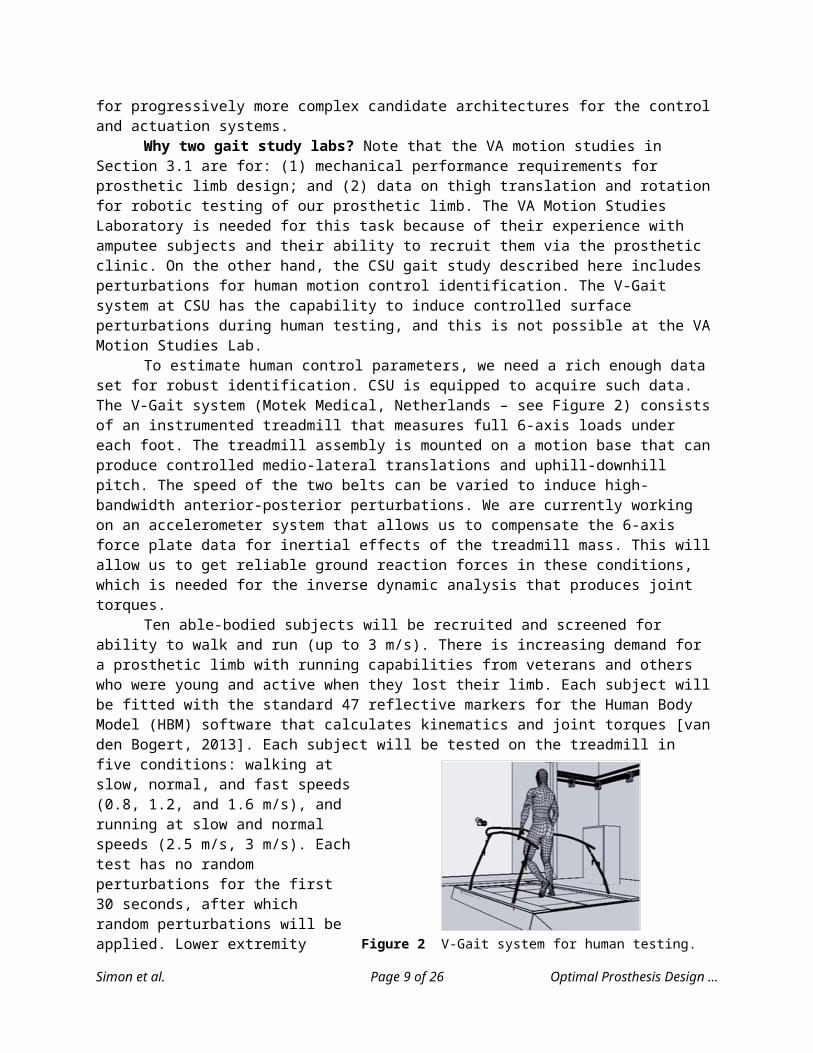
Figure 7 High-tracking and high-efficiency solutions from a preliminary study described in Section 3.3.
Preliminary Study A configuration consisting of a DC machine, torsional spring, gear reducer, power transformer and capacitor was modeled to illustrate the feasibility of one of the interconnection modes, namely passive regeneration. Figure 6 shows the configuration. The knee moment profile from [Winter, 2009] was used as a driving input to the simulation. After defining parameters corresponding to the DC machine (Maxon RE65), a coarse search was conducted over 4 configuration parameters: gear ratio, spring stiffness, converter ratio and capacitance. The outcomes of the simulation were: (1) closeness between the human and calculated knee angle; and (2) how mechanical energy is split among Joule losses (series resistance), kinetic energy (moving parts), elastic potential energy (spring) and electric energy (capacitor). The study shows that certain parameter combinations accurately reproduce knee angle but do not store significant amounts of electric energy, while others are more effective at storing energy but produce a less accurate match to human data. Figure 7 shows two such cases, which use off-the-shelf components. Note that a tradeoff between impedance modulation and regeneration efficiency was also found in [Tabor, 1988]. That paper recommended large capacitors (unavailable in 1988) to solve the design limitations. Ultracapacitors with capacitances as high as 3000 F, masses as small 500 g, and series resistances as small as 0.3 milliohm, can now be bought for less than $100.
As part of our research, optimization will be conducted to search for non-adjustable parameters such as gear ratio and spring stiffness that can work across various regeneration regions and other modes of operation. Also, parameters such as converter ratio and combined bank capacitance can be tailored to operating condition as dictated by optimization.
3.4 Objective 4: Prosthesis Control The proposed prosthesis control system has a hierarchical structure with low-level controllers, passive interconnection modes, and supervisory switching control. We will build on existing theory for hybrid dynamic systems, accounting for stability, robustness, and performance. The prosthesis and its proposed hierarchical control architecture correspond to a hybrid dynamic system. Hybrid dynamics comprise continuous variables xc and discrete variables xd, which evolve according to the general form:
where + and superscripts are used to denote values of xd before and after a transition, u is the control vector, and w is a vector of exogenous inputs. This description is general enough to capture our proposed real-time parameter switchings and changes in hardware interconnection. Function fc will be known once offline optimization is conducted to define hardware components (Section 3.5). Open-loop trajectories for xd and u result from this optimization. A major research objective will be to design the closed-loop switching law fd and feedback law u to meet stability, robustness, and performance requirements.
When fc, fd and u are known, Lyapunov-based methods have been available since the 1990s [Branicky, 1998; Brockett, 1993; Liberzon, 2003]. Robust analysis and design for hybrid systems has also been studied [Savkin, 1998]. Crucial to our project, safety certification of hybrid systems has received much attention recently [Prajna, 2004; Ratschan, 2005].
Simon et al. Page 9 of 16 Optimal Prosthesis Design …
external archive
archipelago 1 archipelago 2
archipelago 3
Migration between
archipelagos
Execute parallel BBO algorithms
Store individuals in the Pareto archive
Figure 8 Multiple-system BBO. Each archipelago optimizes a single problem. Features migrate more within archipelagos, but sometimes migrate between archipelagos.
These methods can be used to design feedback and switching laws that robustly stabilize the system. Although control of hybrid systems has been studied [Hedlund, 1999; Borrelli, 2003], the formulation and solution of the problem with regard to energy recovery/tracking performance tradeoff will be one of our contributions. During control design, concepts such as impedance control can be incorporated as pre-defined modes of operation, leaving only tuning parameters and switching logic to be optimized. A problem formulation in the framework of model predictive control [Lazar, 2006] is anticipated, leveraging proven benefits of BBO in Section 3.5 for solutions for design and explicit portions of the controller, and real-time solutions for control.
Auxiliary Design Issues In addition to the prosthesis control research proposed above, we will incorporate auxiliary features into our prosthetic leg as we develop a useful prototype. These features include, among others, user intent recognition [Varol, 2010], stumble detection and recovery [Zhang, 2011], sitting and standing strategies [Varol, 2008], walking on slopes [Sup, 2011], and walking up and down stairs [Inoue, 2012]. These issues are far from trivial, but our proposed research is not focused on
them. We recognize their importance and we plan to implement previously-published solutions to these problems to make our prosthetic leg functional for the robotic and human trials in Section 4.
3.5 Objective 5: Multi-Objective Optimization The preceding subsections discussed prosthesis design (Section 3.3) and control (Section 3.4). Separate optimization of related related systems gives overly conservative designs. Hardware design and control optimization are intimately connected in prostheses, so a more integrated approach is proposed here. Our proposed optimization approach will use biogeography-based optimization (BBO). We choose this approach because: (1) BBO has performed competitively with many other evolutionary algorithms in benchmark tests [Simon, 2008a, 2011a]; (2) BBO involves island groups, and thus naturally lends itself to the optimization of related systems.
BBO candidate solutions are characterized by a set of features. When a copy of a feature in solution x replaces one in solution y, we say that the feature has emigrated from x and immigrated to y. The probability that a solution shares its features increases with fitness, and the probability that it receives features decreases with fitness. BBO has properties in common with other evolutionary algorithms, but also has distinct features and behaviors [Simon 2011a].
To generalize the simulataneous optimization problem, suppose we have several optimization problems P1, P2, … Each problem is optimized by BBO, so each problem is associated with some candidate solutions. Also, each problem includes several objectives:
P1 = {I11, I12, I13, …; O11, O12, O13, …}, P2 = {I21, I22, I23, …; O21, O22, O23, …}, …Now we note that each candidate solution includes independent variables, also called features:
I11 = {S111, S112, S113, …}, I12 = {S121, S122, S123, …}, …Each feature is a member of a specific design parameter class:
Sijk Dik
Si,j1,k and Si,j2,k belong to the same class Dik because they are both instances of the k-th feature of the i-th
Simon et al. Page 10 of 16 Optimal Prosthesis Design …
0 10 20 30 40 500.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Generation Number
PriceUniqueness
0 10 20 30 40 500
0.2
0.4
0.6
0.8
1
Generation Number
Rise timeOvershootIntegral of Squared Error
Figure 9 – Multiple-system BBO optimizes two separate but related problems by periodically sharing information between candidate solutions for the two problems. Each objective in the above plots is normalized to [0, 1], where 0 is optimal.
problem. The key point in our proposed multi-system BBO is that sometimes Di1,k1 = Di2,k2 even though i1 i2 or k1 k2. Figure 8 depicts multi-system BBO for three related problems. Each archipelago uses BBO to solve an optimization problem. Some of the problems have similarities; even if the problems are different, candidate solutions may have similarities. Given candidate solutions to two problems, we can measure their similarity with partial distance [Hathaway, 2001], which gives distances between solutions based on three metrics: (1) inter-island distance, based on common solution features; (2) inter-archipelago distance, based on common objective characteristics; and (3) another inter-archipelago distance, based on common constraints. We combine these metrics to obtain migration probability between pairs of islands.
Theoretical Analysis Theoretical analysis of multiple-system BBO is an important sub-objective of the proposed research. We do not have preliminary theoretical results for multi-system BBO, but we have significant results for standard BBO, including Markov theory and dynamic systems analysis to quantify BBO performance [Simon, 2011a, 2011b, 2011c]. Our proposed research will extend those methods to multi-system BBO, which will provide it with a solid analytical foundation.
Preliminary Results We implemented the simultaneous optimization method described above on a robot design problem. Suppose we want to optimize robot hardware design and robot control design. These are separate but related problems. Table 1 shows the design parameters and objectives of the two problems. The objectives of hardware design are to minimize price and uniqueness. Minimization of
uniqueness is the same as maximization of maintainability – the less unique a system is, the easier it is to maintain. The objectives of control design are to minimize rise time, tracking error, and overshoot.
Design Parameters ObjectivesP1: robot
hardwareD1 = {sensor type, number of sensors,
motor type, Kp, Kd}O1 = {price, uniqueness}
P2: robot controller
D2 = {sensor type, number of sensors, motor type }
O2 = {rise time, tracking error, overshoot}
Table 1 – Design parameters and objectives for a robot hardware and control optimization problem. The hardware design problem is P1, and the controller design problem is P2.
Parameters Kp and Kd are the proportional and derivative gains of the robot controller.
Table 1 shows that the hardware and controller design problems do not share any objectives, but they share several design parameters. We have quantified the effect of sensor type on price, uniqueness, and measurement error. We can also increase the number of sensors. Increasing the number of sensors improves controller performance because it improves tracking accuracy, but it also increases cost.
We have also modeled the effect of motor type. The price and uniqueness of each motor type affects the hardware design objectives, and the performance of each motor type (which includes both accuracy and precision) affects the controller design objectives.
To provide proof-of-concept for multi-system BBO, we implemented it for robot design. We optimize control and hardware in parallel, with periodic interactions as good solutions from each problem share information. Figure 9 shows results of the average cost values of the two problems, averaged over 50 simulations. The plot on the left shows hardware cost values, and the plot on the right shows controller
Simon et al. Page 11 of 16 Optimal Prosthesis Design …
cost values. We do not have space to discuss details, but these results indicate that multi-system BBO could be effective at optimizing multiple, related systems like those encountered in prostheses.
Other Approaches to Multi-System Optimization Many other approaches have been proposed for the simultaneous optimization of multiple, related systems. This field is often called multi-disciplinary design optimization (MDO) [Xiao, 2010]. Current approaches include collaborative optimization [Tappeta, 1997], concurrent subspace optimization [Wujek, 1996], bi-level integrated system synthesis [Kodiyalam, 1999], analytical target cascading [Michelena, 2003], penalty decomposition [DeMiguel, 2006], and others [Chinchuluun, 2009], [Martins, 2013], [Yi, 2008]. There are also approaches that are geared toward linear or quadratic problems [Vicente, 1994]. Even evolutionary algorithms have been applied to MDO [Depince, 2007], [Li, 2011], [Ruiyi, 2011].
All MDO approaches have advantages, disadvantages, and limitations. Virtually all MDO approaches assume a hierarchical structure with a high-level system composed of multiple systems [Sinha, 2002], [Alexandrov, 2009]. Hierarchical decompositions often increase the nonlinearity of the problem, which has profound implications for numerical conditioning and robustness [Alexandrov, 2000]. For example, collaborative optimization assumes that disciplinary experts can contribute to the optimization of related systems with a high degree of insulation from other systems [Braun, 1997] by assuming that shared design variables are constant at each subsystem level. As another example, analytic target cascading assumes that high-level optimization can be decomposed into independent subproblems. Finally, we note that previous MDO approaches using EAs assume a single integrated population of candidate solutions.
In contrast, the proposed multi-system BBO algorithm operates autonomously with limited human input, and with tightly-integrated systems such as those in prostheses. We do not refer to the systems as subsystems, because we do not make any assumptions about system hierarchy. Our proposed algorithm also includes multiple populations, one for each system, described above, which provides further independence of each system. We allow sharing between systems via inter-archipelago migrations.
Many benchmarks for comparing MDO methods have been presented [Padula, 1996], [Roth, 2008], [Tedford, 2010], [Varis, 2012], [Yi, 2008], [Zhao, 2011]. Our proposed research includes comparing our new approach to other algorithms on multi-system benchmarks. This will provide context for our research and allow us to elucidate its advantages and disadvantages. In view of the no-free-lunch theorem, we do not expect any single approach to outperform any other single approach for all problems. But for multi-systems that operate autonomously with limited human input and with tightly-integrated systems, such as prostheses, we hypothesize that our decentralized BBO-based approach will be an attractive option.
4. Evaluation Plan
4.1 Objective 6: Prosthesis Prototype Fabrication and TestWe propose to fabricate and test a prosthesis prototype. Fabrication will take place at CSU’s Machine Shop. Testing will take place with CSU’s hip robot (see Section 2.4 above). Robotic testing will include comparisons between our new prosthesis and commercially available prostheses owned by CSU, such as the C-leg and the Mauch SNS.
Control software will be implemented on a dsPIC33, a 16-bit microcontroller with DSP capabilities. The dsPIC33 was chosen due to its high speed, low power, high memory, many peripherals, and our extensive experience with it in other research. A graphical PC interface wirelessly connected to the embedded system will be designed for diagnosis, tuning, and software updates. While we await prosthesis integration, the embedded system will be tested using a hardware-in-the-loop configuration.
Verification and Validation Verification refers to low-level testing of specific components, and validation refers to high-level system testing. Prosthesis sensors will be tested, including potentiometers, encoders, accelerometers, and foot force sensors. Time synchronization between the hip robot and the prosthesis controller needs to be verified. In general, prosthesis users expect their prosthetic knee to
Simon et al. Page 12 of 16 Optimal Prosthesis Design …
follow their lead, as they move as naturally as possible (low energy expenditure) with their hip. The prosthesis is responsible to follow the lead of the user’s hip movements.
Following low-level verification, high-level validation of the entire prosthesis/hip robot system will be conducted. The first step will be to test while the prosthesis is controlled by the simple time-varying PD controller identified from human control experiments (control architecture 1 in Section 3.2). The time base for the controller will be obtained by stretching or compressing its time scale to match gait cycle times based on information from heel and toe switches. The purpose of these tests is to: (1) ensure that the heel and toe switches can accurately detect the gait phase transitions by comparison with the robot gait phase synchronization signal; and (2) confirm the correct operation of the gait phase detection software, the implementation of the prosthesis controller gait phase state transitions, and the correct rescaling of the open-loop control. These tests can be broken down into categories: (a) steady state gait cycle times within the slow to fast walking speeds; and (b) transient gait cycle times (for example, transitioning from a slow walk to a fast walk).
The next validation step is to perform tests with more advanced controllers, such as control architectures 2-5 as defined in Section 3.2. Initially, these controllers will be validated under steady-state gait cycle times, and then they will be validated using transient gait cycle times. Depending on the test, further testing could progress to steady-state walking on a ramp; stair climbing; sitting down and standing up; and transient conditions such as trips, stumbles, missteps, and slips. In addition, user intent recognition will need to be validated. We have not discussed user intent recognition in this proposal, and we do not propose any novel research in this area. We will implement published, currently-available user intent recognition methods to integrate in our product [Luo, 2002; MacDonald, 2007]. However, even without human intent recognition, we can perform human trials at known steady-state walking speeds.
Validation results will not only feed back into the simulation software, but will also provide us the confidence to move to our final objective human trials, discussed in the following.
4.2 Objective 7: Human TrialsWe propose to conduct a clinical feasibility study of our prototype prosthesis in three transfemoral amputees. This work will be done in the Motion Studies Lab at the Cleveland VA Medical Center (VAMC). Participants will be recruited to span a range of activity levels, ages, and prosthetic systems currently used. There will be at least one participant who is younger and active and uses a high-end prosthetic limb system, and there will be at least one participant who is older and uses a conventional passive device such as the Mauch knee.
Test protocols and methods will be identical to those described in Section 3.1, with the addition that each subject will be tested twice: using their own prosthetic limb, and using the prototype. The prototype will not be suitable for home use, and participants will only be given limited time in the laboratory to practice with the prototype before testing.
Each participant will have the prototype fitted by the Prosthetics and Orthotics Laboratory of the Cleveland VAMC, including socket fabrication and alignment. Patient height, weight, limb segment lengths, and medical history will be recorded. In addition to the quantitative assessment performed via the biomechanical analysis of movement, a qualitative assessment questionnaire will be administered to each subject to gain a better understanding for the positives and negatives associated with each subject’s interaction with the prosthesis.
5. Under-Represented Groups
Gait study subjects will be recruited by integrating the screening and selection process for project participation into the physical therapy for every transfemoral amputee treated by the Rehabilitation Services of the Cleveland VAMC. Consultations with Dr. Kelly and Joseph Bonscer together with the close working relationship of Dr. Hardin with the Department of Physical Medicine and Rehabilitation at the VAMC will ensure access to the appropriate candidates. Able-bodied controls may be recruited from
Simon et al. Page 13 of 16 Optimal Prosthesis Design …

research staff, students, CSU or VAMC. The participation of all research subjects will be on a strictly voluntary basis. We will attempt to recruit 50% females and 50% minorities for participation, but will not specifically exclude participants based on sex or race. There is a disproportionate number of males who are veterans, but this should not bias the study’s results.
Cleveland State University is a leader in enrolling and graduating minorities, and is recognized nationally in the top 100 in Diverse Issues in Higher Education. In fall 2011, 36% of undergraduate students were under-represented minorities [CSU, 2012, p. 61]. CSU ranks first in Ohio for graduating minority students with master’s degrees [CSU, 2005, p. 7]. CSU has two programs for increasing research opportunities for minority students: the state-funded STARS Program and the federally-funded McNair Program, with which this project’s PI is involved. The PI of this proposal has a history of mentoring and publishing with students from minority groups [Churavy, 2008; Mouradi, 2011; Ovreiu, 2010; Scheidegger, 2011; Simon, 2013b; Tuma, 2002]. CSU students who belong to under-represented groups will be actively and individually recruited to work on this research.
6. Dissemination of Research Results
(1) Gait Study Data – The gait study data collected in Sections 2.1 and 2.7 will be made available on the project web site. This will provide other researchers with a consolidated, consistent, comprehensive set of data for their own prosthesis research.
(2) Hip Robot – The hip robot developed in Section 2.3 will be made available at CSU to other prosthesis researchers on a fee-for-use basis. The hip robot will be a unique contribution to prosthesis research, and will allow system testing in a large variety of customized environmental conditions.
(3) Software – This research will result in three general-use software packages with source code available on the PI’s web site. The first package will include prosthesis simulation software. The second package will include simultaneous subsystem optimization software. The third package will include reinforcement algorithms for control optimization.
(4) Publications – Results from the proposed research will be submitted to journals and conferences in the areas of prosthetics, biomedical engineering, optimization, control, robotics, and computer intelligence.
(5) Integration into Course Work – Dr. Simon teaches an evolutionary algorithm course [Simon 2008b], Dr. Richter teaches a robotics course [Richter, 2013b], and Dr. van den Bogert teaches a dynamics/kinematics course at CSU. Dr. Hardin is a research faculty at Case Western Reserve University. The results of this research will be integrated into the lecture material and assignments for these courses.
(6) Commercialization – See the Data Management Plan for details.(7) Outreach – The PI will conduct outreach activities at CSU to publicize the results of the
research and to inspire high school students to pursue careers in CPS. Outreach activities will be conducted through the Fenn Academy, which is a consortium of the CSU Fenn College of Engineering and 38 local high schools. The Fenn Academy is funded by donations, and so no additional funds are requested by this proposal for outreach. About 800 high school students (40% of whom are minorities) visit the CSU engineering college each year through Fenn Academy programs, providing an ideal opportunity for outreach and early CPS education.
7. Broader Impacts
The broader impacts of the proposed research include new algorithms for the optimization of multiple related systems, such as those that contain closely interacting subsystems in the mechanical, electrical, and human domain. This is particularly applicable to prosthetics, but is also important to other fields. Our approach combines evolutionary optimization with innovative human testing to obtain templates for optimization with the goal of obtaining a system that can cooperate intelligently with human users.
Simon et al. Page 14 of 16 Optimal Prosthesis Design …

Systems today are becoming continually more complex and interdisciplinary, requiring algorithms of the type that we propose here.
We will make gait study and human trial data available to the research community. After patient data is obtained, we will obtain IRB approval to release de-identified test data for the use of other researchers in the area of human motion and prostheses. Test data will be freely available on a web site maintained by the research team. Data such as this is not currently available in readily-accessible form, so although this is not our primary goal, it will still be a significant contribution of the proposed research to the CPS community. Details are discussed in the Data Management Plan of this proposal.
The proposed research will result in at least two general-use software packages, including source code, which will be available on the internet. One software package will include prosthesis simulation software. Another package will include multi-system optimization software. This will allow other researchers to replicate research results, and to experiment with their own optimization and control algorithms. Details are discussed in the Data Management Plan of this proposal.
Another broader impact will be outreach activities at CSU to publicize the research and to inspire high school students to pursue careers in robotics and rehabilitation engineering. Details are discussed above at the end of Section 6.
8. Investigators’ Prior Research
Dr. Simon focuses his research on biologically-motivated optimization. He is the author of a new textbook on evolutionary algorithms [Simon, 2013a], so this research is aligned with his current research and teaching. Dr. Simon was the CSU PI for the control algorithm portion of a grant funded by the state of Ohio (subcontracted from the Cleveland Clinic), was directed at developing a hydraulic prosthetic knee. Dr. Simon’s NSF award most closely related to the current proposal is described as follows.
NSF Award Number 0826124 – The award amount, including supplements, is $529,206, and the project duration is from August 2008 to August 2013.
Project Title – Biogeography-Based Optimization (BBO) of Multiple Related Complex Systems.Summary of Results: Intellectual Merit – The grant involves the initial development of the
BBO algorithm, mathematical modeling, biologically-motivated extensions, and miscellaneous applications. Note that this grant was focused on fundamental BBO theory and developments, as can be seen from the BBO publication list [Simon, 2010; also see Dr. Simon’s biographical sketch]. In contrast, the current proposal is focused on developing multi-system BBO, and applying it to prosthetic knee development and optimization in a manner that is extendible to general CPS.
Summary of Results: Broader Impacts – The grant has resulted in multiple academic/industry collaborations and student internships. The grant has supported 3 doctoral students, 5 masters’ students, and 5 undergraduate students, including one under-represented minority. The grant has resulted in the dissemination of BBO as a viable and competitive evolutionary optimization algorithm. BBO has been applied to many real-world problems by researchers and practicing engineers [Simon, 2010].
Publications – During the last 5 years, the grant resulted in 12 conference papers, 8 journal papers, and 4 book chapters, all of which are peer-reviewed [Simon, 2010], and which have been cited over 300 times. Most of these papers are co-authored with students. The grant indirectly led to the publication of a graduate-level text on evolutionary optimization algorithms [Simon, 2013a].
Research Products – The publications that have resulted from the research, Matlab-based source code, and BBO publications by other researchers, are available at the BBO web site [Simon, 2010].
Dr. van den Bogert focuses his research on computational modeling of musculoskeletal dynamics, and related issues. His recent research has focused on developing efficient numerical methods for simulation and optimal control of human movement. These methods are being applied at several industrial and academic labs. He has been the PI of one NSF grant (Prediction of Human Gait Adaptation Using Optimization Principles) and four NIH grants in human musculoskeletal dynamics and control.
Simon et al. Page 15 of 16 Optimal Prosthesis Design …

Dr. Richter focuses his research on theoretical and applied aspects of control, system dynamics, and mechatronics. Dr. Richter has recently developed a hybrid multi-regulator architecture based on sliding modes [Richter, 2007, 2011] which has been shown to enforce constraints with zero conservativeness while maintaining stability and robustness. Dr. Richter has a background in mechanical design and in applying dynamics and control methodologies to mechatronics [Richter, 2009, 2010b].
Dr. Hardin focuses her research on human walking and stability, and the intrinsic and extrinsic criteria that influence them, including joint stiffness, proprioception, muscle strength and endurance, foot anthropometry, prostheses, and footwear. She has an ongoing VA Career Development Award which enables her to learn responsibilities for all aspects of a biomedical research project, acquire skills in management, monitor budgets, recruit subjects, and comply with regulatory requirements. In addition, she has learned to work effectively with able-bodied and injured research study participants, as well as patients who are being treated at the VAMC. She works with a diverse team of students and professionals, including clinicians, engineers, scientists, and regulatory and administrative staff.
Dr. Kelly is a practicing physician at the VA Medical Center in Cleveland. He has had extensive experience in prosthetics and amputee care since beginnning his medical practice in 1991. He leads the Amputee Clinic, which is an interdisciplinary clinical service that is dedicated to the care of amputees. From 1993 thru 2007 he organized the Prosthetics and Amputee rehabilitation didactic module for the Case Western Reserve University affiliated Physical Medicine & Rehabilitation Residency at the MetroHealth Medical Center. Actively engaging in advanced prosthetics research is a natural extension of his clinical expertise.
Simon et al. Page 16 of 16 Optimal Prosthesis Design …