© ethercat technology group. all rights reserved.2 ethercat technology group ... machine control,...
TRANSCRIPT

© EtherCAT Technology Group. All rights reserved.

2 EtherCAT Technology Group
© EtherCAT Technology Group. We reserve the right to make technical changes.
■ Content
3 Why EtherCAT?
4 User and Vendor Statements
6 ETG Member Companies at a Glance
8 EtherCAT Technology Group
10 EtherCAT – Technical Introduction and Overview
20 Implementation Aspects
22 Applications
24 Contact and Member List

3EtherCAT Technology Group
■ its Industrial Ethernet| Standard Ethernet frames used| Supports all Internet Technologies| HTTP, FTP, TCP/IP – without degrading
the real time behavior| Simplifies vertical integration
■ its faster| The fastest system available,
with outstanding synchronization features | Performance widely independent of topology| No underlying sub-system required any more| Meets today’s and tomorrows requirements
■ its easy to use| No manual address setting | No switch configuration| Auto configuration features| Diagnosis with exact localization
■ its flexible topology| All topologies supported: Line, Tree, Star, Ring| No node, switch or hub cascading issues| Up to 65535 nodes per segment| Redundancy, Hot Connect, Hot Swap options
■ its Safety on Ethernet| Safety application and standard automation
with one network| Protocol developed to international
safety standard IEC 61508| Suitable for safety I/O and safety drives| Routable via gateways and fieldbus systems
■ its open| Open Technology, fully disclosed| Supported by the worlds largest
Industrial Ethernet Organization| EtherCAT is IEC Specification: IEC/PAS 62407| Supports well established device profiles
■ its future proof| Widely supported| Controller chips from multiple sources| International standardization| No use of outdated technology
■ its versatile| Master _ Slave, Slave _ Slave and
Master _ Master Communication| Cyclic and acyclic services for process data
and parameter data| Suitable for centralized and distributed
control architectures| Machine control, robotics, embedded systems,
building automation, transport systems, …
■ its cost effective| Meets or even undercuts fieldbus cost levels| No special master cards required –
on-board MAC or low cost standard NIC is fine| Highly integrated Slave Controllers for
lower interface costs| No active Infrastructure components required
■ its well proven| Deployed in series applications since 2003| Thousands of nodes shipped| Implemented on variety of controllers
and operating systems| Large product selection
© EtherCAT Technology Group. All rights reserved.
■ Why EtherCAT?

■ Günter Redeker,Manager Electrical Design, IMA
“IMA is known for high-tech machines for the furniture industry.We have been using PC based controls for years, since this techno-logy provides outstanding performance for dynamic and precisemotion applications. EtherCAT is the matching communicationsystem. We found that using EtherCAT instead of a legacy fieldbussignificantly reduces the CPU load of the control system, eventhough intelligent master cards are not required any more. So wegain performance at reduced costs.”
■ Dr. Peter Heidrich, R&D Manager,Baumüller GmbH, and ETG Board Member:
“Baumüller decided to use EtherCAT due to the signi-ficant benefits it can offer, particularly in terms of pri-ce/performance ratio and availability. This decisionwas underlined through our active collaboration inthe ETG executive committee. We continue to be con-
vinced that the decision for EtherCAT was the right one. As soon as EtherCAT sla-ve controllers became available, Baumüller started producing connections for theb maXX 4400 system in August 2004. ETG has demonstrated that, due to the uni-versality of the EtherCAT technology, EtherCAT-based systems can be developedand realised very quickly.”
■ Kim Hartman,VP Sales & Marketing,TenAsys Corporation
“The EtherCAT standard has potentialto be a significant and disruptive tech-nology in lowering costs and impro-ving performance of hard real time
Ethernet based fieldbus applications. As a 25 year supplier of thehard real time operating systems of iRMX and INtime for Win-dows, TenAsys is particularly aware of the highly optimized struc-ture used in EtherCAT telegrams. The EtherCAT Technology Groupcontinues to add value through cooperative efforts in building asignificant and substantial foundation of partners and customers.We’re very pleased to be associated with the ETG and Beckhoff,and in putting forth effort towards supplying a robust, and highperformance real time EtherCAT master for OEM application.”
■ Clement Peters, Coordinator for Control and Drive Systems, Schuler AG,and ETG Board Member:
“EtherCAT enables us to realize fast drive and hydrau-lic controls for all applications currently used in theSchuler Group. Another crucial factor is that, due toEtherCAT’s performance, we still have enough poten-
tial for solving complex control tasks in future without speed problems. Apartfrom the functional features of a technology, availability of a wide range of com-ponents is very significant for users of automation devices. The fact that so short-ly after ETG was established so many member companies are already presentingEtherCAT products and that further products are in preparation is clear evidencefor the success of this young technology. The main factor determining user ac-ceptance continues to be simple and effective handling of the EtherCAT systemin terms of configuration and diagnosis.”
4 EtherCAT Technology Group
© EtherCAT Technology Group. All rights reserved.
■ User and Vendor Statements
■ Dieter Hess, Managing Director,3S Smart Software Solutions GmbH
“3S decided to implement EtherCAT as the first real-time Ethernetprotocol, since EtherCAT utilises the maximum performance ofEthernet. For us as a software manufacturer, the fact that the mas-ter implementation is independent of special plug-in cards is par-ticularly attractive. The software can be based on the universallyavailable standard Ethernet controller.The openness of the systemand Beckhoff’s active support for ETG are further significant fac-tors.”

■ Chris Choi, Director, Controls Engineering, Husky Injection Molding Systems Ltd.
“Keeping our customers in the lead is never easy! One of the means to sustain this capabi-lity is a continuous renewal of our controlstechnology. In our pursuit of the next genera-
tion of controls, EtherCAT stands out as a fieldbus technology with thebest value. No PCI interface card means lower fieldbus cost, lower PC costand ultimately lower system cost. The unique address mapping techni-que of EtherCAT brings the real-time industrial Ethernet to reach its hig-hest potential. We are yet to be convinced otherwise by other contendersthat they are both technically and economically superior to EtherCAT.”
■ Holger Zeltwanger, Managing Director, CAN in Automation e.V.:
“CANopen and EtherCAT are two commu-nication systems that complement one an-other in an optimal way. By using harmoni-sed application layers a simplified integra-tion through gateways is supported. This is
even facilitated by EtherCAT using many of the CANopen device profiles.”
■ Ludger Borgmann,System Designer,Philips Medical Systems
“We believe that EtherCAT is the righttechnology for the next step towards a sys-tem control architecture that enables us tofurther reduce costs and allows for new in-
novations, which the current architecure is not suitable to serve for. Theperformance of EtherCAT will allow us to implement hard-realtime, safe-ty, and control-functions on one single cable, while simultaneously offe-ring flexible topologies, which will reduce cable-costs significantly.
Not only performance, but also international standardization andworldwide acceptance are important features of EtherCAT. Our changeo-ver to EtherCAT is simplified through the use of CANopen device profilesand the availability of gateways and converters, since we are not able toconvert all of our subsystems and components in one big step.”
5EtherCAT Technology Group
© EtherCAT Technology Group. All rights reserved.
■ Martin Rostan, Product Manager, Beckhoff and Executive Director, EtherCAT Technology Group:
“We are pleased that the EtherCAT Technology Group is now the largestIndustrial Ethernet organisation in the world. The strong growth of theETG reflects the tremendous interest in EtherCAT technology. Manufactu-rers and users recognise the benefits offered by EtherCAT: future-proofperformance, flexible network topology, simple configuration, and lowcosts. Nevertheless, while the number of members is an important crite-rion for the success of a technology organisation, it is not the crucial one.Acceptance of the technology resulting in product developments and ap-plications is even more important. Here too, EtherCAT has been very suc-cessful.”
■ Hans Beckhoff, Managing Director,Beckhoff GmbH
“Naturally, EtherCAT is particularly suitable for fast PC-based controls.The master requires no plug-in card and can be implemented on anyexisting Ethernet controller using a very simple interface. EtherCAT istherefore also well suited to small and medium control technology,where it opens up new areas of application for distributed control. The-refore EtherCAT is the communication backbone of Beckhoff system ar-chitecture and we are very pleased about the worldwide success of thistechnology.”
■ Dmitry Dzilno, Manager, Controls Group,Applied Materials Inc.
“We have evaluated EtherCAT and find especially exciting that this com-munication technology allows to connect fieldbus scanner cards, digitalmotion amplifiers as well as fast I/O using just one Ethernet port insteadof multiple PCI slots. Introducing EtherCAT hence does not require toabandon all well established fieldbus systems right away but provides asmooth migration path especially in demanding motion control applica-tions.”

6 EtherCAT Technology Group
© EtherCAT Technology Group. All rights reserved.
■ The EtherCAT Technology Group members at a glance [as of April 2005]
The EtherCAT Technology Group has become the largestIndustrial Ethernet organization in the world. Founded in November 2003, it is also the fastest growing fieldbus or-ganization. There are members from Austria, Belgium,
Canada, China, Denmark, Germany, Finland, France, GreatBritain, India, Israel, Italy, Korea, Liechtenstein, the Netherlands, Singapore, Sweden, Switzerland, Taiwan,Turkey and the USA.

7EtherCAT Technology Group
© EtherCAT Technology Group. All rights reserved.

In August 2004, the Management Board of the Inter-national Electrotechnical Commission (IEC) approved theLiaison of the EtherCAT Technology Group with the IECCommittee for Digital Communication: The ETG now is of-ficial standardization partner organization.
Benefits of membership■ Member companies receive preferred access to specifi-
cation drafts, specifications, white papers, tools, proto-type evaluation products and initial batch productsand thus have a head start in evaluating, using or im-plementing the EtherCAT technology.
■ The members are eligible to participate in workinggroups and gain influence on future enhancements ofthe EtherCAT technology specifications.
■ ETG representatives actively support internationalstandardization of EtherCAT technologies and repre-sent the member’s interest in international standardi-zation committees such as IEC and ISO.
Everyone should be able to use and implement EtherCAT.The EtherCAT Technology Group stands for this philosophy.The ETG is a forum for end users from different sectors, andfor machine manufacturers and suppliers of powerful con-trol technology with the aim of supporting and promotingEtherCAT technology. The wide range of industry sectorsthat are represented ensures that EtherCAT is optimallyprepared for a large number of applications. With theirqualified feedback, the system partners ensure simple in-tegration of the hardware and software components in allrequired device classes.
The ETG Technical Committee meets frequently to re-view the technology. Technical Task Forces look after topicslike device profile integration, safety, wiring, standardiza-tion or test and certification.
In Training Classes and Seminars the ETG provides de-tailed information about the Technology.
8 EtherCAT Technology Group
© EtherCAT Technology Group. All rights reserved.
■ EtherCAT Technology Group
9EtherCAT Technology Group
■ ETG members have access to the members-only part ofthe EtherCAT web-site, which provides specificationsstill in development, a developers forum and up-to da-te information regarding the technology.
■ The ETG office answers technical inquiries regardingEtherCAT, provides marketing assistance, publishesproduct guides, issues press releases and articles, pro-motes EtherCAT via its website and organizes joint fairand exhibition booths.
International Standardization With 96% of the votes from IEC member states, EtherCATbecame an official IEC specification in February 2005:IEC/PAS 62407. Beyond this highly significant standardiza-tion step, EtherCAT also makes its way into other interna-tional standards. For example, EtherCAT is currently beingintroduced in the IEC 61784-2 standard (Digital data com-munications for measurement and control – Part 2: Addi-tional profiles for ISO/IEC 8802-3 based communication
networks in real-time applications), which is being develo-ped with involvement by ETG experts. EtherCAT technolo-gy will also be integrated in the next version of the inter-national fieldbus standard, IEC 61158, and in IEC 61800-7(Profiles and Interfaces for adjustable speed electrical po-wer drive systems). The International Standardisation Or-ganisation (ISO) includes EtherCAT in the ISO15745 stan-dard.
© EtherCAT Technology Group. All rights reserved.

PLC Task OI
Bus Cycle Bus Cycle Bus Cycle Bus Cycle Bus CycleBus Cycle
T mdv
T I/O T I/O T I/O T I/O T I/O T I/O T I/O T I/O T I/O T I/O T I/O T I/O T I/O T I/OT I/O
PLC Task OI PLC Task OI PLC Task OI PLC Task OI
Input(best case)
Input(worst case)
Output
Tmdv : Master Processing DelayTI/O : Local I/O Update Time (Firmware)
worst case reaction time
best case reaction time
Bus Cycle
Above the fieldbus system level, i.e. for networkingcontrollers, Ethernet has already been the state of the artfor some time. What is new is its application at the drive orI/O level, i.e. in areas that were dominated by fieldbus sys-tems in the past.The main requirementsfor this type of ap-plication are high real-time capability, suitability for smalldata quantities, and naturally cost-effectiveness. EtherCATmeets these requirements and at the same time makesinternet technologies available at the I/O level.
■ Ethernet and real-time capabilityThere are many different approaches that try and providereal-time capability for Ethernet: for example, theCSMA/CD media access procedure is disabled via higher le-vel protocol layers and replaced by the time slice procedu-re or polling; other propositions use special switches that
■ IntroductionFieldbusses have become an integrated component ofautomation technology. They have been tried and testedand are now widely established. It was fieldbus technolo-gy that enabled the wide-scale application of PC-basedcontrol systems. While the performance of controller CPUs– particularly for IPCs – is increasing rapidly, conventionalfieldbus systems tend to represent “bottlenecks” that limitthe performance control systems can achieve. An additio-nal factor is the layered control architecture consisting ofseveral subordinate (usually cyclic) systems: the actualcontrol task, the fieldbus system and perhaps local expan-sion busses within the I/O system or simply the local firm-ware cycle in the peripheral device. Response times are ty-pically 3-5 times higher than the controller cycle time – anunsatisfactory solution (see Fig. 1).
10 EtherCAT Technology Group
© EtherCAT Technology Group. All rights reserved.
■ Technical Introduction and Overview
This section provides an in-depth introduction into EtherCAT, the Ethernet-based fieldbus system.EtherCAT sets new performance standards. Handling is straightforward and similar to a fieldbus, thanksto flexible topology and simple configuration. Moreover, since EtherCAT can be implemented very cost-effectively, the system enables fieldbusses to be used in applications where fieldbus networking was not an option in the past.
■ Figure 1: Response times of conventional fieldbus systems

Polling/Timeslicing
0102030405060708090
100
2-5%
BroadcastMaster➝Slave
20-30%
EtherCAT
80-97%
At 4 Byte user dataper note
From 2 Bituser dataper note
Data 2HDR 2Data 1HDR 1Ethernet HDR Data nHDR n
Ethernet Telegram 1…n Ethernet Telegram 2 Ethernet Telegram n
CRC
Logi
cal P
roce
ss im
age:
up
to 4
GB
11EtherCAT Technology Group
distribute Ethernet packets in a precisely controlled timelymanner. Whilst these solutions may be able to transportdata packets more or less quickly and accurately to theconnected Ethernet nodes, the times required for the redi-rection to the outputs or drive controllers and for readingthe input data strongly depend on the implementation.
If individual Ethernet frames are used for each device,the usable data rate is very low in principle: The shortestEthernet frame is 84 bytes long (incl. inter-packet gap IPG).If, for example, a drive cyclically sends 4 bytes of actual va-lue and status information and accordingly receives 4 by-tes of command value and control word information, at100% bus load (i.e. with infinitely short response time ofthe drive) a usable data rate of only 4/84= 4.8% is achie-ved. At an average response time of 10 µs, the rate drops to1.9%. These limitations apply to all real-time Ethernet ap-proaches that send an Ethernet frame to each device (orexpect a frame from each device), irrespective of the pro-tocols used within the Ethernet frame.
■ EtherCAT operating principleEtherCAT technology overcomes these inherent limitationsof other Ethernet solutions: the Ethernet packet is no lon-ger received, then interpreted and process data then co-pied at every device. The EtherCAT slave devices read thedata addressed to them while the frame passes through
© EtherCAT Technology Group. All rights reserved.
■ Figure 3: Comparison of Bandwidth Utilisation
the node. Similarly, input data is inserted while the tele-gram passes through (see Fig. 2). The frames are only de-layed by a few nanoseconds.
Since an Ethernet frame comprises the data of manydevices both in send and receive direction, the usable datarate increases to over 90%. The full-duplex features of100BaseTX are fully utilized, so that effective data rates of> 100 Mb/s (>90% of 2 x 100 Mb/s) can be achieved (see Fig. 3).
The Ethernet protocol according to IEEE 802.3 remainsintact right up to the individual device; no sub-bus is required. In order to meet the requirements of a modulardevice like an electronic terminal block, the physical layerin the coupling device can be converted from twisted pairor optical fibre to E-bus (alternative Ethernet physical layer: LVDS according to [4,5]). The signal type within themodular assembly (E-bus) is also suitable for transfer via a twisted pair line over short distances (up to 10 m). A mo-dular device can thus be extended very cost-efficiently.Subsequent conversion to Ethernet 100BASE-TX physicallayer is possible at any time.
■ Figure 2: Process data is inserted in telegrams

48 Bit
Destination Source EtherType Header . . . CRC
Ethernet H. IP Header UDP H. Header . . . CRC
1 .. n EtherCATCommands
48 Bit 16 Bit 16 Bit 32 Bit
160 Bit 64 Bit
Embedded in Standard Ethernet Framew. EtherType 88A4h
MTU: max. 1514 Byte
Or: via UDP/IPwith UDP Port 88A4h
Length TypeRes.
11 Bit 1 Bit 4 Bit
0 11 12 15
12 EtherCAT Technology Group
© EtherCAT Technology Group. All rights reserved.
■ ProtocolThe EtherCAT protocol is optimized for process data and istransported directly within the Ethernet frame thanks to aspecial Ethertype. It may consist of several EtherCAT tele-grams, each serving a particular memory area of the logi-cal process images that can be up to 4 gigabytes in size.The data sequence is independent of the physical order ofthe Ethernet terminals in the network; addressing can bein any order. Broadcast, Multicast and communication bet-ween slaves are possible. Direct Ethernet frame transfer isused in cases where maximum performance is requiredand the EtherCAT components are operated in the samesubnet as the controller.
However, EtherCAT applications are not limited to asubnet: EtherCAT UDP packages the EtherCAT protocol in-to UDP/IP datagrams (see Fig. 4). This enables any controlwith Ethernet protocol stack to address EtherCAT systems.Even communication across routers into other subnets ispossible. In this variant, system performance obviously de-pends on the real-time characteristics of the control and itsEthernet protocol implementation. The response times ofthe EtherCAT network itself are hardly restricted at all: theUDP datagram only has to be unpacked in the first station.
In addition to data exchange according to the mas-ter/slave principle, EtherCAT is also very suitable for com-munication between controllers (master/master). Freelyaddressable network variables for process data and a va-riety of services for parameterization, diagnosis, program-
■ Figure 5: Flexible Topology: Line, Tree or Star■ Figure 4: EtherCAT: Standard Frames according to IEEE 802.3 [3]
ming and remote control cover a wide range of require-ments. The data interfaces for master/slave and mas-ter/master communication are identical.”
EtherCAT only uses standard frames according to [3] –the frames are not shortened. EtherCAT frames can thus besent from any Ethernet MAC, and standard tools (e.g. mo-nitor) can be used.
■ TopologyLine, tree or star: EtherCAT supports almost any topology(see Fig. 5). The bus or line structure known from the field-busses thus also becomes available for Ethernet.
Particularly useful for system wiring is the combina-tion of line and branches or stubs: the required interfacesexist on many devices (e.g. on I/O modules); no additionalswitches are required. Naturally, the classic switch-basedEthernet star topology can also be used.
Wiring flexibility is further maximised through thechoice of different cables. Flexible and inexpensive stan-dard Ethernet patch cables transfer the signals optionallyin Ethernet mode (100BASE-TX) or in E-bus signal repre-sentation. Plastic optical fibres (POF) complement the sys-tem for special applications. The complete choice of Ether-net wiring – such as different optical fibres and copper ca-bles – can be used in combination with switches or mediaconverters.
The Fast Ethernet physics (100BASE-TX) enables a cablelength of 100 m between two devices. Since up to 65535
13EtherCAT Technology Group
© EtherCAT Technology Group. All rights reserved.
■ Table 1: EtherCAT Performance Overview
Process Data Update Time
256 distributed digital I/O 11 µs = 0,01 ms
1000 distributed digital I/O 30 µs
200 analog I/O (16 bit) 50µs ↔ 20 kHz
100 Servo Axis, with 8 Bytes 100 µs
input and output data each
1 Fieldbus Master-Gateway 150 µs
(1486 Bytes Input and
1486 Bytes Output Data)
However, high-resolution distributed clocks are not on-ly used for synchronization, but can also provide accurateinformation about the local timing of the data acquisition.For example, motion controllers typically calculate veloci-ties from sequentially measured positions. Particularlywith very short sampling times, even a small temporal jit-ter in the position measurement leads to large step chan-ges in the computed velocity. With EtherCAT, timestampdata types are introduced as a logical extension. The high-resolution system time is linked to the measured value,which is made possible by the large bandwidth offered byEthernet. The accuracy of a velocity calculation then nolonger depends on the jitter of the communication system.It is orders of magnitude better than that of measuringtechniques based on jitter-free communication.
■ PerformanceEtherCAT reaches new dimensions in network performan-ce. Thanks to hardware integration in the slave and directmemory access to the network controller in the master, thecomplete protocol processing takes place within hardwareand is thus fully independent of the run-time of protocolstacks, CPU performance or software implementation. Theupdate time for 1000 I/Os is only 30 µs – including I/O cy-cle time (see Table 1). Up to 1486 bytes of process data canbe exchanged with a single Ethernet frame – this is equi-valent to almost 12000 digital inputs and outputs. Thetransfer of this data quantity only takes 300 µs.
devices can be connected, the size of the network is almostunlimited.
■ Distributed clocksAccurate synchronization is particularly important in caseswhere spatially distributed processes require simultane-ous actions. This may be the case, for example, in applica-tions where several servo axes carry out coordinated mo-vements simultaneously.
The most powerful approach for synchronization is theaccurate alignment of distributed clocks, as described inthe new IEEE 1588 standard [6]. In contrast to fully syn-chronous communication, where synchronization qualitysuffers immediately in the event of a communication fault,distributed aligned clocks have a high degree of toleranceversus possible fault-related delays within the communi-cation system.
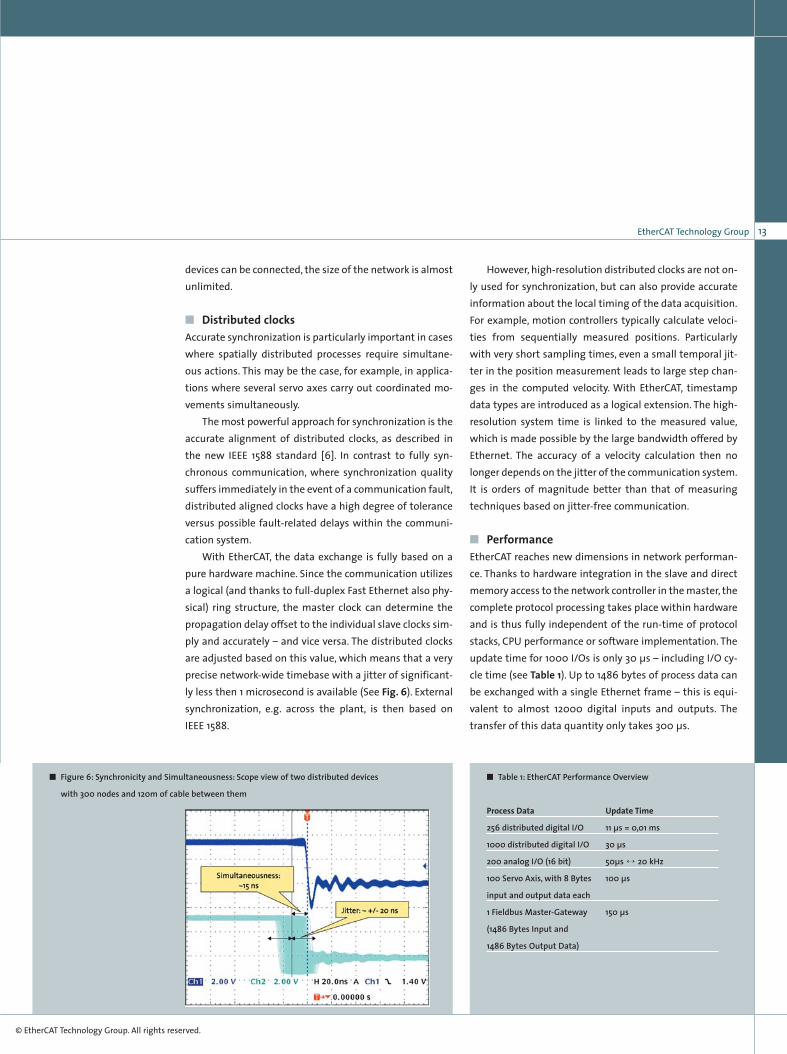
With EtherCAT, the data exchange is fully based on apure hardware machine. Since the communication utilizesa logical (and thanks to full-duplex Fast Ethernet also phy-sical) ring structure, the master clock can determine thepropagation delay offset to the individual slave clocks sim-ply and accurately – and vice versa. The distributed clocksare adjusted based on this value, which means that a veryprecise network-wide timebase with a jitter of significant-ly less then 1 microsecond is available (See Fig. 6). Externalsynchronization, e.g. across the plant, is then based on IEEE 1588.
■ Figure 6: Synchronicity and Simultaneousness: Scope view of two distributed devices
with 300 nodes and 120m of cable between them

14 EtherCAT Technology Group
© EtherCAT Technology Group. All rights reserved.
■ Figure 7: Decentralized Fieldbus Interfaces
pology recognition down to the individual terminals, thisverification can not only take place during system start-up,automatic reading in of the network is also possible (con-figuration up-load).
Bit faults during the transfer are reliably detectedthrough evaluation of the CRC checksum: The 32 bit CRCpolynomial has a minimum hamming distance of 4. Apartfrom broken wire detection and localisation, the protocol,physical layer and topology of the EtherCAT system enableindividual quality monitoring of each individual transmis-sion segment. The automatic evaluation of the associatederror counters enables precise localisation of critical net-work sections. Gradual or changing sources of error such asEMI influences, defective connectors or cable damage aredetected and located, even if they do not yet overstrain theselfhealing capacity of the network.
■ High availabilityIncreasing demands in terms of system availability are ca-tered for with optional cable redundancy that enables de-vices to be changed without having to shut down the net-work. EtherCAT also supports redundant masters with hotstandby functionality. Since the EtherCAT slave controllersimmediately return the frame automatically if an inter-ruption is encountered, failure of a device does not lead tothe complete network being shut down. Dragchain appli-cations, for example, can thus be specifically configured asstubs in order to be prepared for cable break.
The communication with 100 servo axes only takes 100µs. During this time, all axes are provided with commandvalues and control data and report their actual positionand status. The distributed clock technique enables theaxes to be synchronised with a deviation of significantlyless than 1 microsecond.
The extremely high performance of the EtherCAT tech-nology enables control concepts that could not be realisedwith classic fieldbus systems. With EtherCAT, a communi-cation technology is available that matches the superiorcomputing capacity of modern Industrial PCs. The bus sys-tem is no longer the bottleneck of the control concept. Dis-tributed I/Os are recorded faster than is possible with mostlocal I/O interfaces. The EtherCAT technology principle isscalable and not bound to the baud rate of 100 MBaud –extension to GBit Ethernet is possible.
■ DiagnosisExperience with fieldbus systems shows that availabilityand commissioning times crucially depend on the dia-gnostic capability. Only faults that are detected quickly andaccurately and located unambiguously can be rectifiedquickly. Therefore, special attention was paid to exemplarydiagnostic features during the development of EtherCAT.
During commissioning, the actual configuration of thenodes (e.g. drives or I/O terminals) should be checked forconsistency with the specified configuration. The topologyshould also match the configuration. Due to the built-in to-

15EtherCAT Technology Group
switchport devices. The central IPC becomes smaller andtherefore more costeffective. One Ethernet interface is suf-ficient for the complete communication with the periphe-ry (see Fig. 8).
■ Device profilesThe device profiles describe the application parametersand the functional behaviour of the devices including thedevice class-specific state machines. For many device clas-ses, fieldbus technology already offers reliable device pro-files, for example for I/O devices, drives or valves. Users arefamiliar with these profiles and the associated parametersand tools. No EtherCAT-specific device profiles have there-fore been developed for these device classes. Instead,simple interfaces for existing device profiles are being offered. This greatly assists users and device manufactu-rers alike during the migration from the existing fieldbusto EtherCAT.
■ CANopen over EtherCAT (CoE)CANopen device and application profiles are available for awide range of device classes and applications, rangingfrom I/O components, drives, encoders, proportional valvesand hydraulic controllers to application profiles for plasticor textile machinery, for example. EtherCAT can provide thesame communication mechanisms as the familiar CANo-pen [9] mechanisms: object dictionary, PDO (process dataobjects) and SDO (service data objects) – even the network
© EtherCAT Technology Group. All rights reserved.
■ Figure 8: EtherCAT leads to smaller Controllers
■ SafetyConventionally, safety functions are realised separatelyfrom the automation network, either via hardware orusing dedicated safety bus systems. Safety over EtherCATenables safety-related communication and control com-munication on the same network. The safety protocol isbased on the application layer of EtherCAT, without in-fluencing the lower layers. It is certified according to IEC61508 and meets the requirements of Safety Integrated Le-vel (SIL) 4. The data length is variable, making the protocolequally suitable for safe I/O data and for safe drive tech-nology. Like other EtherCAT data, the safety data can berouted without requiring safety routers or gateways.
■ EtherCAT instead of PCIWith increasing miniaturisation of the PC-components,the physical size of Industrial PCs is increasingly determi-ned by the number of required slots.The bandwidth of FastEthernet, together with the process data width of theEtherCAT communication hardware enables new direc-tions: classic interfaces that are conventionally located inthe IPC are transferred to intelligent EtherCAT interfaceterminals (see Fig. 7). Apart from the decentralised I/Os,drives and control units, complex systems such as fieldbusmasters, fast serial interfaces, gateways and other com-munication interfaces can be addressed.
Even further Ethernet devices without restriction onprotocol variants can be connected via decentralised
virtual Ethernet SwitchFunctionality
virtual MAC AddressIP Address
PDOMapping
ATMDT
FileAccess
Mailbox
EtherCAT Slave Controller
Physical Layer
IDN
CANopenApplication
IEC61491Application
HTTP,FTP, ...
File system,Bootloader
Process Data
Object Dictionary
SDOIP
TCP
Ethernet
Service Channel
Process Data
UDP
FoE EoE SoE CoE CoE/SoE
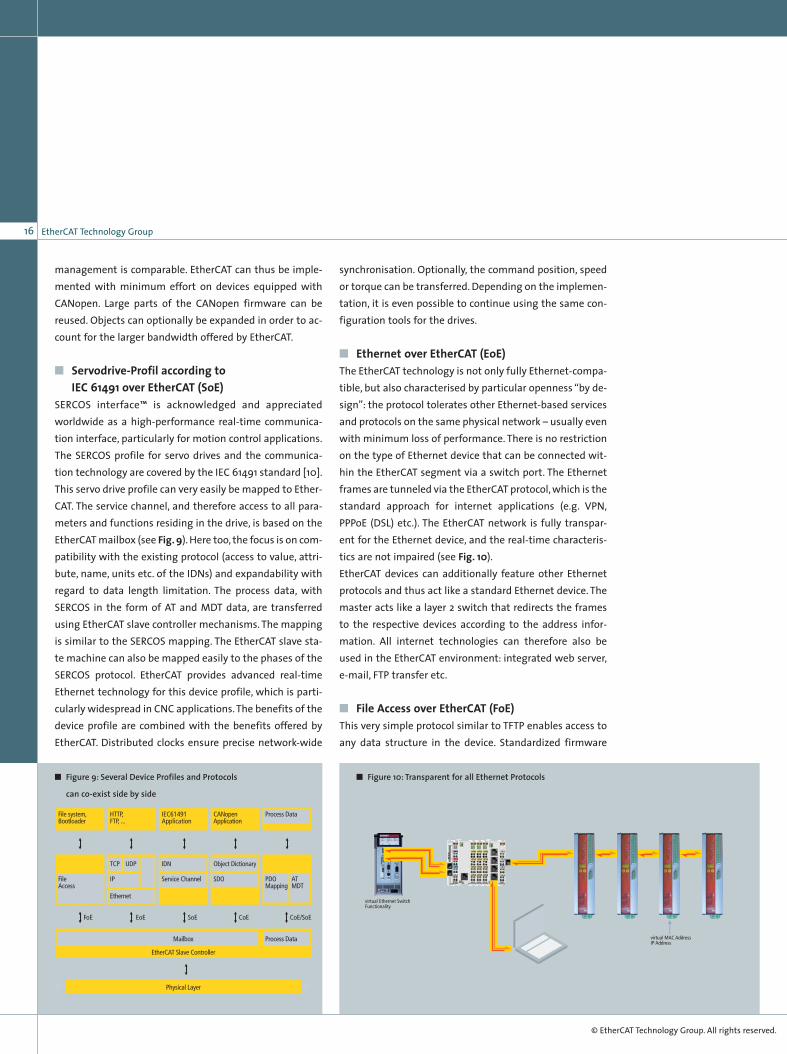
■ Figure 9: Several Device Profiles and Protocols
can co-exist side by side
management is comparable. EtherCAT can thus be imple-mented with minimum effort on devices equipped withCANopen. Large parts of the CANopen firmware can bereused. Objects can optionally be expanded in order to ac-count for the larger bandwidth offered by EtherCAT.
■ Servodrive-Profil according toIEC 61491 over EtherCAT (SoE)
SERCOS interface™ is acknowledged and appreciatedworldwide as a high-performance real-time communica-tion interface, particularly for motion control applications.The SERCOS profile for servo drives and the communica-tion technology are covered by the IEC 61491 standard [10].This servo drive profile can very easily be mapped to Ether-CAT. The service channel, and therefore access to all para-meters and functions residing in the drive, is based on theEtherCAT mailbox (see Fig. 9). Here too, the focus is on com-patibility with the existing protocol (access to value, attri-bute, name, units etc. of the IDNs) and expandability withregard to data length limitation. The process data, withSERCOS in the form of AT and MDT data, are transferredusing EtherCAT slave controller mechanisms. The mappingis similar to the SERCOS mapping. The EtherCAT slave sta-te machine can also be mapped easily to the phases of theSERCOS protocol. EtherCAT provides advanced real-timeEthernet technology for this device profile, which is parti-cularly widespread in CNC applications. The benefits of thedevice profile are combined with the benefits offered byEtherCAT. Distributed clocks ensure precise network-wide
16 EtherCAT Technology Group
© EtherCAT Technology Group. All rights reserved.
■ Figure 10: Transparent for all Ethernet Protocols
synchronisation. Optionally, the command position, speedor torque can be transferred. Depending on the implemen-tation, it is even possible to continue using the same con-figuration tools for the drives.
■ Ethernet over EtherCAT (EoE)The EtherCAT technology is not only fully Ethernet-compa-tible, but also characterised by particular openness “by de-sign”: the protocol tolerates other Ethernet-based servicesand protocols on the same physical network – usually evenwith minimum loss of performance. There is no restrictionon the type of Ethernet device that can be connected wit-hin the EtherCAT segment via a switch port. The Ethernetframes are tunneled via the EtherCAT protocol, which is thestandard approach for internet applications (e.g. VPN,PPPoE (DSL) etc.). The EtherCAT network is fully transpar-ent for the Ethernet device, and the real-time characteris-tics are not impaired (see Fig. 10).EtherCAT devices can additionally feature other Ethernetprotocols and thus act like a standard Ethernet device. Themaster acts like a layer 2 switch that redirects the framesto the respective devices according to the address infor-mation. All internet technologies can therefore also beused in the EtherCAT environment: integrated web server,e-mail, FTP transfer etc.
■ File Access over EtherCAT (FoE)This very simple protocol similar to TFTP enables access toany data structure in the device. Standardized firmware

17EtherCAT Technology Group
© EtherCAT Technology Group. All rights reserved.
upload to devices is therefore possible, irrespective ofwhether or not they support TCP/IP.
■ Infrastructure costsSince no hubs and switches are required for EtherCAT, costsassociated with these devices including power supply, in-stallation etc. are avoided. Standard Ethernet cables andstandard low cost connectors are used, if the environmen-tal conditions permit this. For environment requiring in-creased protection sealed connectors according to IECstandards are specified.
■ SummaryEtherCAT is characterised by outstanding performance,very simple wiring and openness for other protocols. Ether-CAT sets new standards where conventional fieldbus sys-tems reach their limits: 1000 I/Os in 30 µs, optionally twis-ted pair cable or optical fibre and, thanks to Ethernet andInternet technologies, optimum vertical integration. WithEtherCAT, the costly Ethernet star topology can be replacedwith a simple line structure – no expensive infrastructurecomponents are required. Optionally, EtherCAT may also bewired in the classic way using switches, in order to inte-grate other Ethernet devices. Where other real-time-Ether-net approaches require special connections in the control-ler, for EtherCAT very cost-effective standard Ethernetcards (NIC) are sufficient.
EtherCAT is versatile: Master to Slave, Slave to Slave andMaster to Master Communication is supported (see Fig 11).
Safety over EtherCAT is available. EtherCAT makes Ethernetdown to the I/O level technically feasible and economical-ly sensible. Full Ethernet compatibility, internet technolo-gies even in very simple devices, maximum utilisation ofthe large bandwidth offered by Ethernet, outstanding real-time characteristics at low costs are outstanding featuresof this network.
■ Literature[1] EtherCAT Technology Group, http://www.ethercat.org
[2] Beckhoff GmbH, http://www.beckhoff.com
[3] IEEE 802.3: Carrier Sense Multiple Access with Collision Detection
(CSMA/CD) Access Method and Physical Layer Specifications.
[4] IEEE 802.3ae-2002: CSMA/CD Access Method and Physical Layer Specifi-
cations: Media Access Control (MAC) Parameters, Physical Layers, and Ma-
nagement Parameters for 10 Gb/s Operation.
[5] ANSI/TIA/EIA-644-A, Electrical Characteristics of Low Voltage Differential
Signaling (LVDS) Interface Circuits
[6] IEEE 1588-2002: IEEE Standard for a Precision Clock Synchronization Pro-
tocol for Networked Measurement and Control Systems
[7] Janssen, Dr. Dirk, Büttner, Holger, “EtherCAT – the Ethernet Fieldbus”. PC
Control Magazine 3/2003.
[8] EtherCAT Communication Specification, ETG 2004
[9] EN 50325-4: Industrial communications subsystem based on ISO 11898
(CAN) for controller-device interfaces. Part 4: CANopen.
[10] IEC 61491: Electrical equipment of industrial machines – Serial data link
for real-time communication between controls and drives
■ Figure 11: Versatile network architecture

constant Header completely sorted(mapped) process data
WorkingCounter:constant
Padding Bytesand CRCgenerated byEthernetController (MAC)
Ethernet
FrameHDRFrameHDRDA SA Type Frame
HDREtherCATHDR
Data CTR Pad. FCS
Ethernet Header ECAT EtherCAT Telegram
(6) (6) (2) (2) (10) (0…1486) (2) (0…32) (4)
■ Master-Implementation with one Process Image
sive active plug-in card by just using a passive NIC card orthe on-board Ethernet MAC.
Implementation of an EtherCAT master is very easy,particularly for small and medium-sized control systemsand for clearly defined applications.
For example a PLC with a single process image: if itdoes not exceed the 1486 bytes, cyclic sending of a singleEthernet frame with the cycle time of the PLC is sufficient.Since the header does not change at run time, all which isrequired is a constant header to be added to the processimage and the result to be transferred to the Ethernet con-troller.
The process image is already sorted, since with Ether-CAT mapping does not occur in the master, but in the sla-ves – the peripheral devices insert their data at the respec-tive points in the passing frame. This further unburdensthe host CPU. It was found that an EtherCAT master ent-irely implemented in software on the host CPU uses less ofits processing power than much slower fieldbus systemsimplemented with active plug-in cards – even servicing theDPRAM of the active card puts more load on the host.
System configuration tools – available from severalmanufacturers – provide the network and device parame-ters including the corresponding boot-up sequence in astandardized XML format.
The EtherCAT Technology was developed with very low costdevices in mind, like I/O terminals, sensors, and embeddedcontrollers. EtherCAT only uses standard Ethernet framesaccording to IEEE 802.3. These frames are sent by the mas-ter device, the slave devices extract and/or insert data onthe fly. Thus EtherCAT uses standard Ethernet MACs, whe-re they really make sense: in the master device. And Ether-CAT slave controllers are used, where such dedicated chipsreally make sense: in the slave device, where they handlethe process data protocol in hardware and provide maxi-mum real time performance regardless of the local proces-sing power or software quality.
■ MasterEtherCAT communicates a maximum of 1486 Bytes of dis-tributed process data with just one Ethernet frame. So un-like other solutions, where the master device in each net-work cycle has to process, send and receive frames for eachnode, EtherCAT systems typically only need one or two fra-mes per cycle for the entire communication with all nodes.Therefore EtherCAT masters do not require a dedicatedcommunication processor. The master functionality putshardly any load on the host CPU which can handle this taskeasily besides processing the application program: soEtherCAT can be implemented without special and expen-
18 EtherCAT Technology Group
© EtherCAT Technology Group. All rights reserved.
■ Implementation Aspects

Device Description(XML)
Control Task
HDR Process Data
Process ImageDescription (XML)
SystemConfiguration Tool
NetworkDescription incl.Boot-Up (XML)
EtherCAT Master
Standard Ethernet MAC
19EtherCAT Technology Group
■ Master sample codeMaster sample code for supporting a master implementa-tion is available for a nominal fee. The software is suppliedas source code and comprises all EtherCAT master func-tions, including Ethernet over EtherCAT. All the developerhas to do is adapt the code, which was created for Win-dows environments, to the target hardware and the RTOSused. This has already been done successfully for a numberof systems.
© EtherCAT Technology Group. All rights reserved.
■ Structure of Master Sample Code

■ Slave Evaluation KitThe corresponding Slave Evaluation Kit makes all theseinterfaces easily accessible. Since with EtherCAT powerfulcommunication processors are unnecessary, the Slave Eva-luation Kit contains an 8 bit µC which optionally can beused as host CPU. The kit comes with slave host softwarein source code, and a reference master software package.
■ SlaveSeveral Manufacturers provide EtherCAT slave controllers.Slave controller functionality is also available in form ofFPGAs, e.g. by ALTERA.
The slave controllers developed by Beckhoff (availablevia semiconductor distribution) feature an internal DPRAMand offer a range of interfaces for accessing this applica-tion memory:■ The serial SPI (serial peripheral interface) is intended
particularly for devices with small process data quanti-ty, such as analog I/O modules, sensors, encoders orsimple drives.
■ The 32-bit parallel I/O interface is suitable for the con-nection of up to 32 digital inputs/outputs, but also forsimple sensors or actuators operating with 32 data bits.Such devices do not need a host CPU at all.
■ The parallel 8/16-bit microcontroller interface corres-ponds to conventional interfaces for fieldbus control-lers with DPRAM interface. It is particularly suitable formore complex devices with larger data volume.
20 EtherCAT Technology Group
© EtherCAT Technology Group. All rights reserved.
EtherCAT MACLVDS /MII (1)
FPGAProgram Storage
E2 PROM
LVDS/MII (2)EtherCAT MAC
Auto-Forwarderwith Loop Back
RegistersSYNC-Manager, FMMU
PDO…PDOnDual Port Memory
Mailbox
Slave Controller
Host CPU
PDOMapping
SDOMapping TCP/IP (optional)
HTTP, FTP,SMTP, …
RAM for TCP/IPand complexApplications
(optional)
Application Mappingnon volatileData
4 Groups of 8 binary Signals
8 I/Os 8 I/Os 8 I/Os 8 I/Os
EtherCAT MACLVDS /MII (1)
FPGAProgram Storage
E2 PROM
LVDS/MII (2)EtherCAT MAC
Auto-Forwarderwith Loop Back
RegistersSYNC-Manager, FMMU
PDO…PDOnDual Port Memory
SDO
Slave Controller
I/O Applicationnon volatileData
■ Slave Hardware: FPGA with Host CPU ■ Slave Hardware: FPGA with direct I/O

© EtherCAT Technology Group. All rights reserved.
21EtherCAT Technology Group
© EtherCAT Technology Group. All rights reserved.
Product Examples ■
For latest product news please go to
www.ethercat.org/products.html
© EtherCAT Technology Group. All rights reserved.
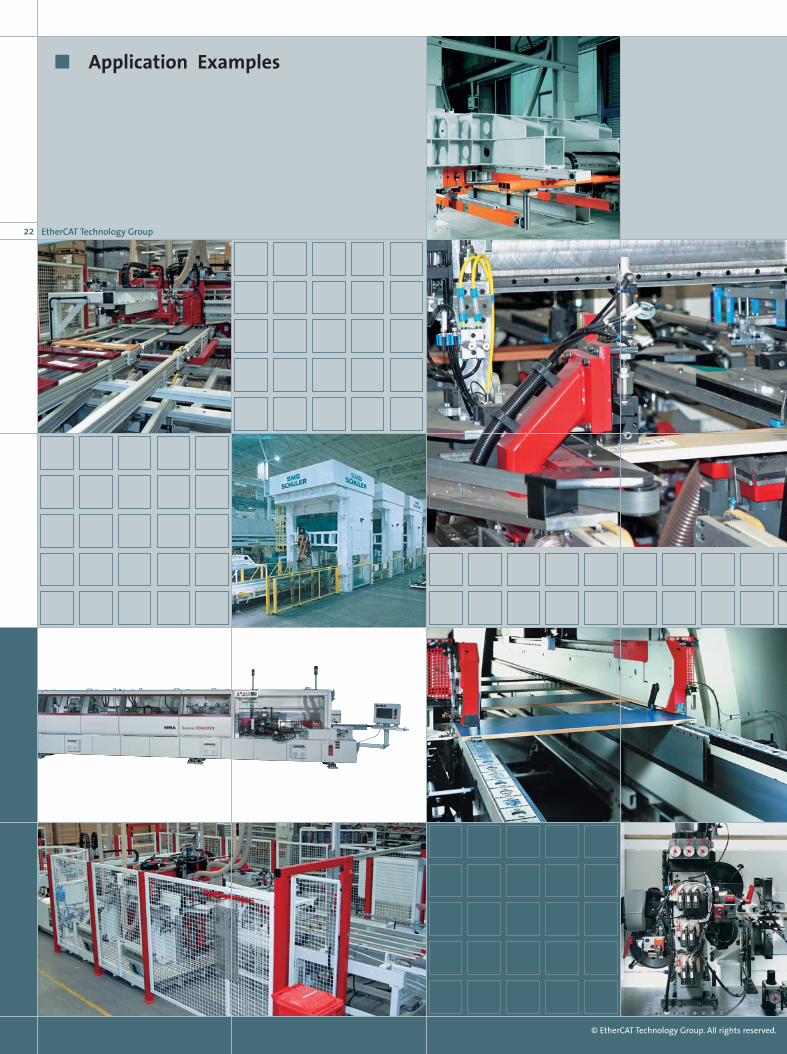
■ Application Examples
22 EtherCAT Technology Group

© EtherCAT Technology Group. All rights reserved.
23EtherCAT Technology Group
© EtherCAT Technology Group. All rights reserved.

24 EtherCAT Technology Group
3S-Smart Software Solutions GmbH,
Germany
3S-Systems GmbH, Germany
ABB Power Technologies AB, Sweden
ABB Stotz-Kontakt GmbH, Germany
acontis technologies GmbH, Germany
ACS-Tech80 Ltd., Israel
Advantech Co. Ltd., Taiwan
AeroLas GmbH, Germany
ALSTOM Power Conversion, Germany
Altera GmbH, Germany
AMK GmbH & Co.KG, Germany
Andrive Antriebstechnik GmbH, Germany
Applied Materials, Inc., USA
Aradex AG, Germany
ASIRobicon S.p.A., Italy
ASM Technology Singapore Pte.Ltd.,
Singapore
AutomationX GmbH, Austria
Aweta G&P, Netherlands
AXIOM GB Ltd., Great Britain
Baldor UK Ltd, Great Britain
Balluff GmbH, Germany
Baumüller Nürnberg Electronic GmbH+
Co.KG, Germany
Beck IPC GmbH, Germany
Beckhoff Industrie Elektronik GmbH,
Germany
BERGHOF Automationstechnik GmbH,
Germany
Berner Fachhochschule für Technik und
Informatik, Switzerland
Billhöfer Maschinenfabrik, Germany
Binar AB,Sweden
b-plus GmbH, Germany
Brosis Engineering GmbH, Germany
Bruderer Maschinenfabrik AG,
Switzerland
Bruker Daltonik GmbH, Germany
CEGELEC, Belgium
Chr. Mayr GmbH & Co. KG, Germany
Cimetrics Inc., USA
Cleveland Motion Controls, USA
Continental AG, Germany
Danaher Motion GmbH, Germany
Danaher Motion Stockholm AB, Sweden
Delta Tau Data Systems, Inc., USA
Deutschmann Automation, Germany
DeWind GmbH, Germany
Dieffenbacher GmbH & Co.KG, Germany
Digitronic Automationsanlagen GmbH,
Germany
DLR e.V. Deutsches Zentrum für Luft- und
Raumfahrt , Germany
Eagle Precision Technologies Inc., Canada
Electronic Control Systems, Italy
Elmar Vögel Software & Automation, Austria
elrest Automationssysteme GmbH, Germany
Eltromat GmbH, Germany
ESR Pollmeier GmbH, Germany
ETAS GmbH, Germany
Fachhochschule München, Germany
Fachhochschule Solothurn, Switzerland
FERAG AG, Switzerland
ferrocontrol Steuerungssysteme GmbH & Co.
KG, Germany
FH Gießen – Friedberg, Germany
Finn-Power Oy, Finland
Flanders' Mechatronics Technology Centre,
Belgium
Focke & Co., Germany
Fraba Posital GmbH, Germany
Fritz Kübler GmbH, Germany
Fronius International GmbH, Austria
GAS - Gesellschaft für Antriebs- und
Steuerungstechnik mbH, Germany
Hahn -Meitner-Institut Berlin GmbH,
Germany
Hans Turck GmbH & Co. KG, Germany
Heesemann GmbH & Co. KG, Germany
HEINZ SIEGFRIED AG, Switzerland
Hengstler GmbH, Germany
Hilscher GmbH, Germany
Husky Injection Molding Systems Ltd., Canada
IBS Prüfsysteme, Germany
ICP DAS Co. Ltd,Taiwan
IDAM GmbH & Co. oHG, Germany
IMA Automation GmbH, Germany
Imperial Tobacco Limited, Germany
IMS Messsysteme GmbH, Germany
Indumat GmbH & Co.KG, Germany
Industrial Dynamics Company, USA
Industriële Automatisierung Kremer BV,
Netherlands
Ingenieurgemeinschaft IgH, Germany
IVECO Motorenforschung AG, Switzerland
IVO GmbH & Co., Germany
Janz Automationssysteme AG, Germany
Jetter AG, Germany
Kayser Threde GmbH, Germany
KEB Antriebstechnik, Germany
Kithara Software GmbH, Germany
Komax AG, Switzerland
König Prozessautomatisierungs GmbH,
Germany
Kuhnke GmbH, Germany
Kuka Controls GmbH, Germany
KW-Software GmbH, Germany
Leister Process Technologies, Switzerland
Lenord, Bauer & Co. GmbH, Germany
LG Industrial Systems, Korea
Lust Antriebstechnik GmbH, Germany
Lust Drivetronics GmbH, Germany
LVD Company n.v., Belgium
Ma.Vi. SRL, Italy
Manar Sistem (Meysar) Ltd., Turkey
MESCO Engineering GmbH, Germany
MESSUNG SYSTEMS, India
Mettler & Fuchs AG, Switzerland
MICRONOR AG, Switzerland
MKS Instruments Inc., USA
Moeller GmbH, Germany
Moog GmbH, Germany
MTS Sensor Technologie GmbH, Germany
Müller Weingarten AG, Germany
Netstal-Maschinen AG, Switzerland
Nokian Capacitors Ltd., Finland
NTI AG / LinMot, Switzerland
Optel Vision, Canada
PANTEC Engineering AG, Liechtenstein
Paul Maschinenfabrik GmbH & Co.KG,
Germany
Pfeiffer Vacuum, Germany
Philips Medical Systems DMC GmbH,
Germany
Profimatics GmbH, Germany
PROMESS Montage- u.Prüfsysteme GmbH,
Germany
ProSign GmbH, Germany
Reis GmbH & Co. Maschinenfabrik, Germany
RIGATRON Sagl, Switzerland
Robert Bosch GmbH, Germany
Robox S.P.A., Italy
Röders GmbH, Germany
Rohwedder AG, Germany
ROLAND ELECTRONIC GmbH, Germany
RS elektronik GmbH, Germany
Saia-Burgess Controls AG, Switzerland
Samsoft ApS, Denmark
Samsung Electronics Co. Ltd., Korea
schaeper Automation GmbH, Germany
Schmidhauser AG, Switzerland
SWAC GmbH, Germany
Schuler AG, Germany
SELEMA SRL, Italy
Serad SA, France
Servo Dynamics, USA
SEW-EURODRIVE GmbH & Co.KG, Germany
Sigmatek GmbH & Co. KG, Austria
SMC European Tech Centre, Great Britain
SND Smart Network Devices GmbH,Germany
Soft-O-Matic, Netherlands
Steinhoff Automation & Fieldbus-Systems,
Germany
STMicroelectronics D&A GmbH, Germany
Stöber Antriebstechnik GmbH & Co.KG,
Germany
SYBERA e.K., Germany
SYSTEMATIX Inc., USA
TAS Engineering AG, Switzerland
TECHNOSOFT S.A., Switzerland
TenAsys Corp., USA
Test-Fuchs Ing. Fritz Fuchs Ges.m.b.H., Austria
ThyssenKrupp Presta AG, Germany
Tigris Elektronik GmbH, Germany
TR-Electronic GmbH,Germany
Trio Motion Technology Ltd., Great Britain
TWK-Elektronik GmbH, Germany
Unidor Industrieelektronik GmbH, Germany
UNJO AB, Sweden
Vamco International, Inc., USA
WATT DRIVE Antriebstechnik GmbH, Austria
Weidmüller Interface GmbH & Co.KG,
Germany
Weidmüller Schweiz AG, Switzerland
WIEDEG Elektronik GmbH, Germany
WIKA Alexander Wiegand GmbH & Co. KG,
Germany
Wipotec GmbH, Germany
Wittenstein Motion Control GmbH, Germany
WST Systemtechnik GmbH, Germany
WTCM-CRIF, Belgium
YELLOWSTONE SOFT, Germany
Zhejiang Supcon Technology Co. Ltd, China
■ The EtherCAT Technology Group members at a glance [as of April 2005]
■ Contact:
EtherCAT Technology Group
Ostendstraße 196
90482 Nuremberg
Germany
Phone: +49 (0) 911 540 5620
Fax: +49 (0) 911 540 5629
www.ethercat.org