라인 트레이서 - 세미나 (광운대 바람 박성우님)
TRANSCRIPT

바람 24기 박성우
Line Tracer
목차
o Line Tracer란?o Line Tracer 모터선정o Sensor Control
n 정규화
n 가중치
o Controlo PID Controller
n PD 위치제어기n PI 속도제어기
o Line Tracer 구동알고리즘

Line Tracer란?o Line Tracer : 라인을 따라주행하는모바일로봇

Line Tracer란? <비교>

Line Tracer란? <비교>

Line Tracer란?
Sensor
Position Control
Motor
Speed Control
+
Line Tracer

Line Trace 모터선정
Or
Planetary Geared Motor with Encoder
Planetary Geared Motor

Line Trace 모터선정

Sensor Control

Sensor Control
0 1 2 3 4 5 6 7
0 0 0 0 1 1 0 0
수광부
Line
센서값
- Case By Case형식-각 Case에 따른 가중치를 준다.-주행이 매끄럽지 못하여 고속 주행이 어렵다.
<Non-Linear>
o Non Liner의 경우

Sensor Control
정규화
가중치

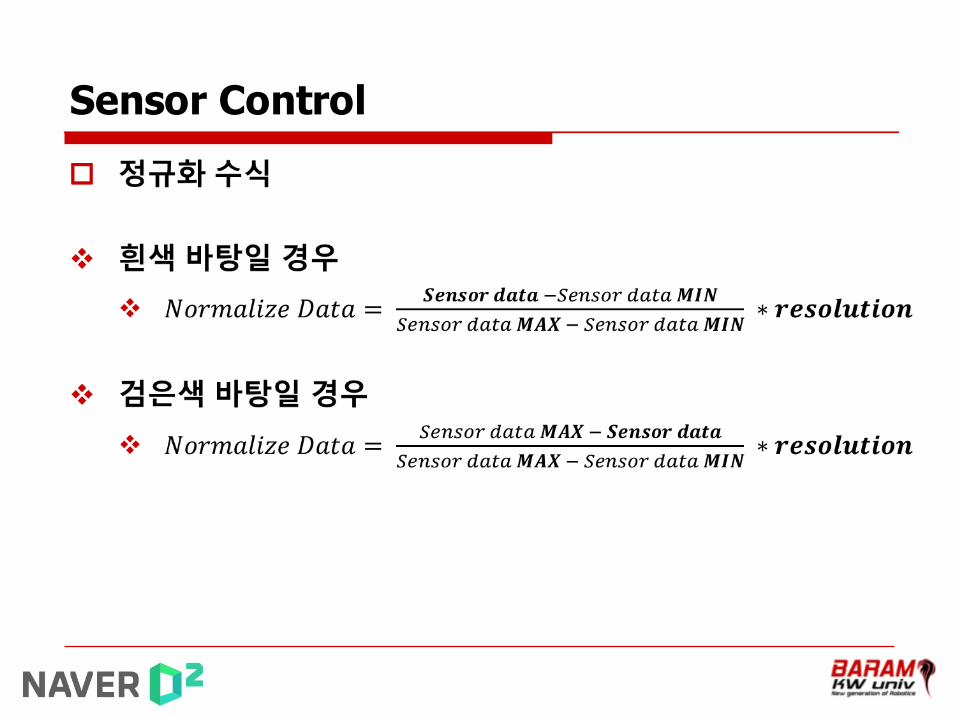
Sensor Controlo 정규화
n 일정하지않은 Data들의형태를맞추는과정
n LineTracer가주행하는환경에따른센서값이다르며각센서마다의값도다르기때문에사용.
MIN MAX
ADC0 10 80
ADC1 6 90
Sensor Controlo

Sensor Controlo 가중치
n LineTracer가안정적으로돌도록하기위해서각센서값에해당하는가중치를곱하여주는것.
가중치

Sensor Controlo 가중치
n LineTracer가안정적으로돌도록하기위해서각센서값에해당하는가중치를곱하여주는것.
-8 -4 -2 -1 1 2 4 8가중치

Sensor Controlo 가중치

Sensor Controlo

Controlo ON/OFF Control
n 단순한 ON/OFF제어의경우 Control Output의변화가크다n Control Output 이 Target에대해진동하는특징

Controlo P Control (Proportional Control)
n Error에비례한제어n ON,OFF제어보다 Target에대한가까운수렴이가능n Steady State Error 발생

Controlo P Control (Proportional Control)
P gain 10 P gain 30

Controlo PI Control (Proportional Integral Control)
n P제어만했을경우, Target에가까워지지만 Control Output과Target이완전히일치하지않는다.(Steady State Error발생)
n P제어에서생기는 Steady State Error를시간적으로누적,Control Output을증가하여 Steady State Error를줄인다.
n Transient Response 이악화되는경향이있다.

Controlo PI Control (Proportional Integral Control)
P gain 10 I gain 2 P gain 10 I gain 5

Controlo PD Control (Proportional Differential Control)
n 오차가변화하는비율에따라서비례하는제어
n D제어단독으로사용하지않고 P제어혹은 I제어와함께사용한다.n Target에수렴하는속도를향상시키지만발산가능성이존재

Controlo PD Control (Proportional Differential Control)
P gain 10 D gain 1 P gain 10 D gain 5

Controlo PID Control(Proportional Integral Differential Control)
n PI제어로실제 Target에가깝게하는제어는완벽하게할수있다. 하지만수렴하는데일정한시간(시정수)이필요.→ 제어 응답속도를줄여줄수있는 D제어기를추가
n 처음에는 Over Drive하는 듯이제어하여, 신속하게목표값에수렴하도록제어한다.→ Transient Response, Steady State Error 모두개선이가능한제어기

Controlo 정리
장점 단점
P제어 Target수렴정확도향상 Steady State Error 발생
PI제어 정확한 Target수렴 Overshoot발생
PD제어 수렴속도향상 발산가능성
PID제어 안정적인제어

Controlo 정리

PID Controllero PID Controller란?
n 비례-적분-미분제어기(PID 제어기) 는실제응용분야에서가장많이사용되는대표적인형태의제어기.
n 어떠한목표값에 System이수렴하여야하는경우사용.

PID Controller

PID Controllero PD 위치제어기
n Line Tracer의중앙이 Line에 수렴하도록하기위하여PD위치제어기를사용.
PD_Control = Kp x Error + Kd x (Error – Pre_Error)
- Error = Reference – SensorData
- Pre_Error = 이전주기의에러값

PID Controllero PI 속도제어기
n Line Tracer의각모터가목표한속도로회전하도록하기위해사용하는제어기
n 각모터의엔코더값을카운트하고이를현재값으로사용
PI_Control = Kp x Error + Ki x Error_Sum + Pre_Control
- Error = Reference – Encoder_Count- Error_Sum += (Error) x (delta_time)
*delta_time : 시간변화량*Pre_Control : 이전주기의조작량
- Error_Sum에대한제한이필요

PID Controllero Encoder

PID Controllero Incremental Encoder

PID Controllero Incremental Encoder
n 모터의속도나회전량을펄스로만들어출력하는센서.n A상, B상으로두개의펄스를출력하며각펄스는 90도위상차를지님.

PID Controllero Absolute Encoder
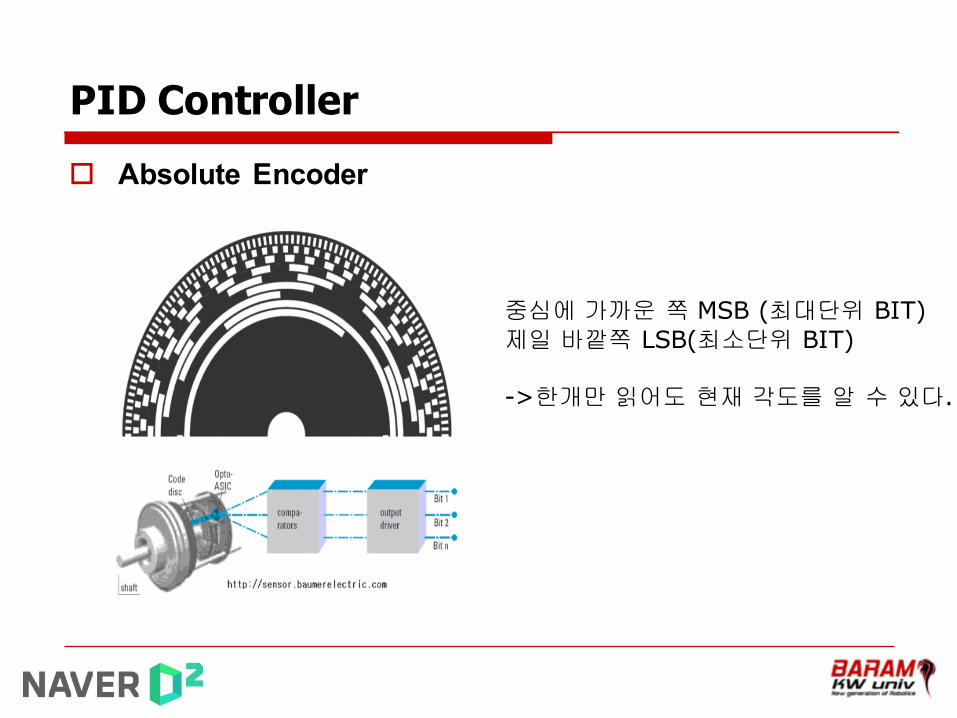
PID Controllero Absolute Encoder
중심에 가까운 쪽 MSB (최대단위 BIT)제일 바깥쪽 LSB(최소단위 BIT)
->한개만 읽어도 현재 각도를 알 수 있다.

Line Tracer구동알고리즘o Line Tracer 구동알고리즘
n Line Tracer의중심이 Line의 중심을따라간다.n Line이왼쪽으로벗어나면왼쪽모터를빠르게돌리고우측모터를느리게돌려 LineTracer가중심을찾도록한다.

Line Sensing
Line Tracer구동알고리즘o 1. 정규화, IF문을 사용한 Line Tracer 구동알고리즘
0 1 2 3 4 5 6 7
0 0 0 0 1 1 0 0
수광부
Line
이진화된정규화값
if(Sensor_Value == 0b00001100){OCR1A = 400;OCR1B = 300;
}

Line Tracer구동알고리즘o 2. Sensor Control과 PD위치제어기를 사용한구동알고리즘
Sensor Control
PD Controller
Line Sensing
ADC 값
현재 Line 위치
PWM Duty

Line Tracer구동알고리즘o 3. Sensor Control과 PD위치제어기, PI속도제어기를사용한구동알고리즘
Sensor Control
PD Controller
Line Sensing
ADC 값
현재 Line 위치
PI ControllerPI Controller
목표 각속도
Encode펄스
PWM Duty

Q / A