第 4 章 信号检测技术
DESCRIPTION
第 4 章 信号检测技术. 一、传感器概述 二、长度及位移检测 三、角度及角位移检测 四、绝对测距 五、力 / 压力检测. 六、速度 / 加速度检测 七、温度检测 八、流量检测 九、电磁量检测 十、视觉检测系统. R. 一、传感器概述. 1 、传感器的基本概念. 人的五官:. 眼睛 耳朵 鼻子 舌头 皮肤. 传感器. 感觉:. 视觉、听觉、嗅觉、味觉、触觉. 功 能. 定义:. 传感器是一种把特定的被测信息量按照一定规律转换成为可用信号输出的器件或装置。. 被测量:物理量、化学量、生物量 ……. - PowerPoint PPT PresentationTRANSCRIPT

第 4 章 信号检测技术
一、传感器概述
二、长度及位移检测
三、角度及角位移检测
四、绝对测距
五、力 / 压力检测
六、速度 / 加速度检测
七、温度检测
八、流量检测
九、电磁量检测
十、视觉检测系统

一、传感器概述1 、传感器的基本概念
人的五官:眼睛 耳朵 鼻子 舌头 皮肤
视觉、听觉、嗅觉、味觉、触觉
定义:
被测量:物理量、化学量、生物量 ……
规律:确定规律,可以重复(线性、非线性、周期)可用信号:便于处理和传输的非噪声信号 (电信号、光信号……)
R例:热敏电阻 --- 温度变化 ---- 电阻变化
传感器:传 -- 传递信息;感 -- 感受被测量;器 -- 器件
传感器是一种把特定的被测信息量按照一定规律转换成为可用信号输出的器件或装置。
感觉: 功 能
传感器

一、传感器概述2 、传感器的构成型式
转换电路:
例:电桥、放大器、振荡器、阻抗变换器、脉冲调宽电路等。
被测量 被测量敏感元件
转换电路
敏感元件:感受被测量变化,并输出相对应的电信号
例:电阻应变片(应变 --- 电阻)
把转换元件输出的电信号变换成为便于记录、显示、处理和控制的可用信号的电路,
又称“信号调理电路” 或 “测量电路”
又称“转换元件” 或 “变换元件”
传感器

二、长度及线位移检测1 、电感式位移传感器
W--- 线圈匝数
ii
im
m Au
lR
R
WL
2
Rm--- 磁路总磁阻
li--- 各段导磁体的长度
ui--- 各段导磁体的磁导率
Ai--- 各段导磁体的截面积

二、长度及线位移检测
l
AWu
ull
AWu
R
WL
Au
l
uA
lR
rm
m
20
20
20
(1) 变气隙式
电感位移传感器—基本形式
思考:灵敏度? 线性度?
l2
1
线圈
铁芯
衔铁
改进方法? 差动式
(2) 变面积式(3) 螺管式

二、长度及线位移检测
(2) 变面积式
(3) 螺管式
蔡萍教材 P40 图 3-5

二、长度及线位移检测电感位移传感器
意大利 Marposs:

二、长度及线位移检测电感位移传感器
中国中原量仪 :

二、长度及线位移检测2 、光栅位移传感器( Grating )
二、长度及线位移检测
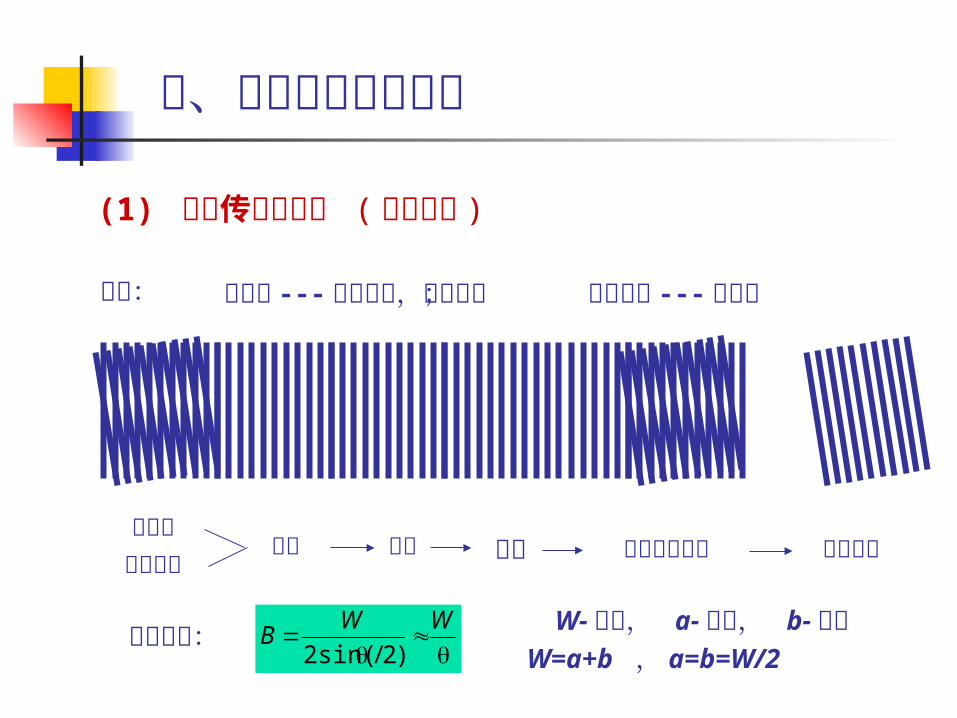
(1) 光栅传感器原理 ( 莫尔条纹 )
构成:
叠合主光栅
指示光栅夹角 明暗相间条纹 莫尔条纹移动
条纹宽度:
WW
B)2/sin(2
W- 栅距, a- 线宽, b- 缝宽W=a+b , a=b=W/2
主光栅 --- 标尺光栅,定光栅; 指示光栅 --- 动光栅

二、长度及线位移检测
莫尔条纹特性:
方向性:垂直于角平分线 → 与光栅移动方向垂直
同步性:光栅移动一个栅距 → 莫尔条纹移动一个间距
放大性:夹角 θ 很小 → B>>W → 光学放大 → 提高灵敏度
准确性:误差平均效应 → 克服个别 / 局部误差 → 提高精度

二、长度及线位移检测(2) 光栅传感器特点 ① 精度高:测长 ±(0.2+2×10-6L)μm ,测角 ±0.1″
② 量程大:透射式 --- 光栅尺长( <1 米),反射式 --->
几十米③响应快:可用于动态测量④增量式:增量码测量 → 计数 断电→数据消失⑤要求高:对环境要求高→温度、湿度、灰尘、振动、
移动精度⑥成本高:电路复杂

二、长度及线位移检测
(3) 光栅传感器结构
1 – 主光栅尺(定光栅)2 – 指示光栅(动光栅)3 – 光电元件4 – 透镜5 – 光源
透射式结构:
反射式结构:
光源 → 指示光栅 → 透射 → 主光栅 →光电元件
光源 →主光栅 → 反射 →指示光栅 →光电元件

二、长度及线位移检测
(4) 代表性产品:
德国 Heidenhain (海德汉):
封闭式:量程 3000mm ,分辨力 0.1 m
开放式:量程 1440mm ,分辨力 0.01m
开放式:量程 270mm
分辨力 1nm

二、长度及线位移检测
英国 Renishaw (雷尼绍):
量程:任意分辨力: 0.1 m 0.01 m
中国长春光机所:
量 程: 1000mm
分辨力: 0.01 m精 度: 2 m

二、长度及线位移检测2 、光学干涉( Interference)
干涉原理(单频干涉):
两束同频光束在空间相遇会发生干涉条纹,其亮暗程度取决于两束光间的相位差 Δφ
亮条:
暗条: Δφ=2kπ, k=0,1,l,2,… 相消干涉
Δφ=2kπ, k=0,1,l,2,… 相长干涉

二、长度及线位移检测结构:
实现要点 :( 1 )单一光源
光源
观察屏、光电接收
固定反射镜
被测物体
半透半反镜
( 4)分光镜(半透半反)
( 5)固定参考反射镜
( 2 )被测物体 ( 3 )光电接收

二、长度及线位移检测
双频激光干涉位移传感器
测量原理:
激光器发出一束激光,含有两束偏振光: 左旋光,频率 f1 右旋光,频率 f2 , 振幅相同, 频率相差约 2MHz 。
激光束 分光器
参考光束
测量光束
光电检测
λ/4波片 渥氏棱镜f2→ 光电检测
f1→ 角锥棱镜
参考信号 测量信号f2-f1 ±Δf
f1±Δf1
f2-(f1± Δf)

二、长度及线位移检测
激光干涉位移传感器
HP5528A Laser interferometer :量程: 100m 分辨力: 0.01 m

三、角度及角位移检测
1 、绝对码光电编码器
原理:平行光源→码盘→ 光电元件→电信号输出 码盘:光学玻璃,透光 /不透光→ 照相腐蚀 要求:分度准确(工艺)、阴暗交替边缘陡峭(工艺、材质)光源: LED → 光学系统 → 平行光 → 投影精确 光电元件:硅光电池,光电晶体管 滞后 → 响应速度 码道:位数→每个码道对应一个光电元件→分辨率
角度分辨率: α=360º/2n n-码道数(位数)
组成:光源、码盘、光电元件
增加码道、增大码盘尺寸 → 有限提高精度光学细分 → 附加码道

三、角度及角位移检测
测量电路:
编码码制: 十进制码 --- 0 1 2 3 4 5 6 7 8 9
二进制码 --- 0000 0001 0010 0011 0100
格 雷 码 ---循环码:相邻两数只有一位不同 每次只有一位变化→转换
放大 → 足够电平 ,驱动整形 → 接近理想方波 细分 → 提高分辨率(光学 + 电路)
多位码同时动作→同步误差→错码
读数直观,不易电路处理
直观,易于后续电路和计算机处理

角度 位置 二进制码 十进制码 格雷码0.0
22.545.067.590.0
112.5135.0157.5180.0202.5225.0247.5270.0292.5315.0337.5
ABCDEFGHIJKLMNOp
0000000100100011010001010110011110001001101010111100110111101111
0123456789
101112131415
0000000100110010011001110101010011001101111111101010101110011000
4 位绝对码光电编码器码制

三、角度及角位移检测
特点:
摩擦轮编码器
小范围绝对位置测量 --- 角度、直线位置小范围位移、速度检测
结构简单、精度高、分辨率高,可靠性好,
应用:
例:直线 → 旋转 < 360º
直接数字量输出 --- 数字传感器,绝对码 --- 绝对角位置传感器测量范围有限( 360º ),速度不高(最高几千转 / 分),怕振动 --- 丢数
360
Dx
连接 --- 弹性连轴结

三、角度及角位移检测
2 、增量码光电编码器结构: 与绝对编码器类似
码道:最外 --- 增量码道:透光扇形区→分辨率 中间 --- 辨向码道:错开半个扇形区 最内 --- 零位码道:透光狭缝→基准脉冲
应用:相对位置测量 --- 角度、直线位置, 位移、速度测量
特点:结构简单、精度高、分辨率高,可靠性好, 脉冲数字输出,测量范围无限 速度不高(最高几千转 / 分) 怕振动 --- 丢数

三、角度及角位移检测
3 、圆光栅传感器工作原理:莫尔条纹技术类型: (1) 直线莫尔条纹:条纹 --- 直线
(2) 圆型莫尔条纹:条纹 --- 圆型
RENISHAW 圆光栅:角度分辨率为 0.01″
系统精度为 ± 0.7″
(a) 径向光栅 --- 圆弧形莫尔条纹光栅:两块,径向刻线,栅距角相同,偏心叠合
条纹宽度不是定值,随位置不同而不同。在位于偏心的垂直位置上,条纹近似垂直于栅线,称横向莫尔条纹在沿着偏心方向上,条纹近似地平行于栅线,称纵向莫尔条纹其他位置上上,称为斜向莫尔条纹
条纹:在不同区域栅线的交角不同,不同曲率半径圆弧

三、角度及角位移检测
光栅:两块完全相同,环形刻线,偏心叠合,
(b) 切向光栅 --- 环形莫尔条纹光栅:两块,切向刻线,切向相同,栅距角相同,
基圆半径不同,栅线面相对同心叠合,条纹:是以光栅中心为圆心的同心圆簇,
宽度也不是定值,随位置不同而不同。特点:具有全光栅平均效应,用于高精度角度测量和分度。
(c) 环形光栅 --- 辐射形莫尔条纹
条纹:近似直线并成辐射方向,称为辐射形莫尔条纹。

四、绝对测距
1 、电涡流测距
(1) 工作原理 :
交变电流 传感器线圈
被测导体
交变磁场 H1
电涡流交变磁场 H2
参数变化 ( 电感、阻抗、 品质因素等 )
输出信号

四、绝对测距
保持其他参数不变,只改变一个参数 --- 测量,
变化因素:被测导体 --- 几何形状、电导率、磁导率 线圈 --- 几何参数、电流大小和频率、 其他 --- 线圈与导体距离
测量原理:
电涡流密度径向分布
涡流密度不等:
电涡流分布:深度:高频激励 --- 表面薄层,
铜导体, 1MHz频率,深度 0.07mm
径向:有限范围 --- 圆环形 --- 涡流环 D=d时:密度最大D=1.8d :下降为 5%D<0.4d :无电涡流
传感器特性:非线性严重,修正

四、绝对测距
导体 --- 传感器的一部分 --- 参数影响
被测导体直径的影响
材料:
形状:
被测导体:作用:
电导率越高,灵敏度越高;磁导率越高,灵敏度越低,平面 ---- 曲面 --- 曲率半径 ( D>3.5d )
思考:激励频率高低有什么影响?

四、绝对测距
日本 Keynce量程: 50mm精度 0.03%

四、绝对测距
2 、激光测距传感器(1) 激光测距特点:测量距离可达几公里甚至几十公里(主要手段)(2) 激光测距方法:飞行时间法、相位差法
(a) 飞行时间法:
2/ctd 被测距离 : c --- 光速 t --- 往返飞行时间
(b) 相位差法:
被测距离 : c --- 光速 f0 --- 脉冲频率 - 相位差
激光器 被测目标原理:激光器发出单个激光脉冲
原理:激光器发出连续激光脉冲 激光器 被测目标
00 42 f
ccD
特点:对时间测量精度要求高,适于测量超长距离(地球 - 月球:分辨力达到 1m )
特点:测量精度高,测量范围大(短距离 – 超长距离)(相机自动调焦)

四、绝对测距
范围: 0.2 ~ 300m 分辨力: 3mm
德国俫卡手持式:范围: 0.2 ~ 200m分辨力: 0.2mm
美国 bushwell 单目军用范围: 1000m分辨力: 1m

四、绝对测距
3 、超声测距传感器
超声测距原理:
2/ctd 被测距离 : c --- 声速 t --- 往返飞行时间
应用:适于大目标、近距离、一般精度测距 手持测距仪 --- 盲人导盲 汽车倒车雷达 --- 汽车安全 工业应用 --- 超声测量液位、物位
特点:超声波束发散,测量范围小 波束聚焦困难,测量精度低 测量目标不能太小;
超生探头 被测目标
超声波传感器(超声波探头),是实现声电转换的装置(超声换能器)这种装置能够发射超声波,同时还可以接收超声回波,并转换成电信号。

五、温度检测
1 、概述
温度分类 :
应用 : 测温
接触测温
非接触测温 热辐射测温
热传导测温
压电效应
热阻效应
热电势效应
金 属 热电阻半导体 热敏电阻
热电偶温 度传感器
压电陶瓷(热释电效应)
→ 敏感元件 → 电参数
光电效应 红外温度传感器、光纤温度传感器
热电阻
电涡流传感器
PN结热电效应 热敏二极管 / 三极管、集成温度传感器
工作原理:

(1) 热电阻原理与特性 :
要求:( 1 )温度系数、电阻率较高 → 提高灵敏度,体积小,反应快( 2 )理化性能稳定 → 提高稳定性和准确性,复现性好 ( 3 )良好的输入 - 输出特性 → 线性 /接近线性,测量精度高( 4 )良好的工艺性 → 批量生产,降低成本
材料:纯金属 ---铂、铜、镍、铁
( 5 )较大的测温范围 → 特别是在低温范围
五、温度检测2 、热电阻
原理:热能 热电阻 电阻值温度 热电阻 阻值

特点:
0 ~ +850℃: )1( 20 BtAtRRt
0 ~ - 200℃: ])100(1[ 320 ttCBtAtRRt
应用:
(1) 在高温和氧化介质中性能极为稳定, 易于提纯,工艺性好(2) 输入输出特性接近线性
(4) 贵重金属,成本较高标准温度计,高精度工业测温,高低温测试
构成:金属铂丝 (0.02~0.07mm)绕制成线圈
(3) 测量精度高: <0 : ℃ ±1℃、 0~100 : ℃ ±0.5℃、 100~650 : ℃ ±0.5%
五、温度检测
Pt100:
R0 : 0℃时的温度 – 标准值 (Pt100, Pt500)
(2) 铂电阻 (Pt)

特点:
-50 ~ 180℃: )1( 320 CtBtAtRRt
应用:
(1) 易于提纯,在 -50 ~ 150℃范围内性能稳定,价格低 (2) 输入输出特性接近线性 :
(3) 电阻率低(为铂电阻的 1/6 ),体积较大 (Cu50, Cu100)(4) 高温易被氧化,易被腐蚀
(5) 测量精度低于铂电阻: -50~50 : ℃ ±0.5℃、 50~150 : ℃ ±1%
小范围,较低温度,测量精度要求低,没有浸蚀性介质,代替铂
五、温度检测
构成:金属铂丝 (0.02~0.07mm)绕制成线圈
(3) 铜电阻 (Cu)
R0 : 0℃时的温度 – 标准值

材料:特点:
分类:
( 1 )温度系数大 → 灵敏度高 (为热电阻 10~100倍)( 2 )结构简单,体积小 → 可以测量点温度( 3 )电阻率高、热惯性小 → 适于动态测温( 4 )易于维护、使用寿命长 → 适于现场测温( 5 )互换性差,非线性严重,精度低
正温度系数热敏电阻 (PTC)
负温度系数热敏电阻 (NTC)
临界温度系数热敏电阻 (CTR)
半导体 --- 半导体热电阻
( 6 )成本低,应用广泛
3 、热敏电阻
五、温度检测
T
B
T AeR 非线性

热敏电阻的应用
家用电器 电熨斗、电冰箱、电饭煲、洗衣机、电暖壶、烘干机、电烤箱、空调机、电热毯、热水器、热得快、电磁炉、
汽车电子 电子喷油嘴、空调机、发电机防热装置、电热座椅
测量仪器 流量计、风速表、真空计、浓度计、湿度计、空气传感器、环境监测仪、
办公设备 复印机、传真机、打印机、扫描仪
农业园艺 温室控制、人工气候箱、烘干系统、
医疗器具 体温计、人工透析、散热系统
工业生产 电动机过热保护、
五、温度检测

应用实例:基于热敏电阻的电机过热保护器:
Rt1 Rt2 Rt3 :热敏电阻 (NTC) ,安装在三相绕组附近
温度低时 :电阻高 三极管不导通 继电器不吸合 电机运行温度高时 :电阻低 三极管导通 继电器吸合 电机停止
五、温度检测

4、热电偶
五、温度检测
(1) 工作原理 :
两种不同导体构成闭合回路
两个节点( A、 B)温度不同
热电势
温差电势:
T
T
AA dTTTE0
),( 0
σA- 温差系数 TA,TB-A 、 B两节点绝对温度
B
AAB N
N
e
kTTE ln)(
k-波尔兹曼常数 e- 电子电荷NA,NB- 导体 AB 的自由电子密度→材料T-节点绝对温度
接触电势:不同导体→自由电子密度不同→扩散→电势 (帕尔帖)
同一导体→两端温度不同→电子迁移(高→ 低) →电势
若两种导体相同: σA=σB → E=0
若两端无温差: T=T0 → E=0 两种情况 导体不同
两端温差条件

(2) 常用热电偶材料:
五、温度检测
材料 测温范围 特点 应用
铂铹 10 纯铂 0 ~ 1000 ℃ 准确性高,成本高 工业
铱铹 10 纯铱 0 ~ 2100 ℃ 科学研究
铱铹 40 铂铹 40 0 ~ 1900 ℃ 氧化、中性气体
镍铁 镍铜 50 ~ 500 ℃ <50 ℃无电势 火灾报警
镍铬 康铜 -200 ~ 900 ℃ 各种场合
镍铬 镍硅 -50 ~ 1300 ℃ 电势大,线性好 各种场合、常用
铜 康铜 -200 ~ 400 ℃ 各种场合
镍铬 金铁 -270 ~ 10 ℃ 低温
铜 金铁 -270 ~ -250 ℃ 灵敏度高 低温

(3) 热电偶结构:
五、温度检测
a) 普通热电偶:
应用:测量气体、蒸汽、液体等介质温度
结构: 1- 热电极 2- 绝缘套管 3-保护套管 4-接线盒
b) 铠装热电偶:结构:热电极 + 绝缘材料
+ 金属保护套特点:细长 (1~3mm) ,可以弯曲,挠性好,强度高 测端热容量小,动态响应快 (0.01s) ,应用:适于狭小空间、点温度
c) 其他热电偶: 薄膜热电偶、浸入式热电阻、

(4) 热电偶的冷端补偿 热电势 :
a) 恒温法:
测 温 : 获得 T → T0固定 → T0=0℃(冷端)冷 端:干扰、波动 T00 误差 冷端温度补偿
标准大气压下,冷端 →冰水混合液(保温容器)
b) 系数修正法:T0≠0 → ℃ 精确计算 → 修正
)( 0TTfE T :测端温度 T0 :参考端(冷端)温度
nkTTT 0 Tn :测量温度 k :修正系数(表 7-5 )
五、温度检测
恒温控制 → 0 ←℃ 实验室(半导体制冷器)
冷端温度补偿方法:

d) 电桥补偿法: 全臂电桥: R1, R2, R3 --- 锰铜线绕制电阻(固定电阻) R4 --- 铜线绕制补偿电阻(热电阻) R --- 限流电阻 E --- 电桥电源平衡: 调整 R4 ,使得电桥输出 Uab=0
补偿:冷端温度↑ 热电偶输出热电势 Ex↓
R4 ↑ → 失衡 → Uab ↑若 Ex↓= Uab↑→ 输出不变
c) 延伸电极法:
需要长线传输信号热电偶长度 1 米左右 延伸电极 (补偿导线 )拉大测端与冷短距离
方法:延伸电极与热电偶的材质尽可能接近, 延伸电极与热电偶的两个节点温度相等
五、温度检测

PN结温度特性:热量→
P N
半导体 PN结→ 分子热运动 热电流电子→ N
空穴→ P温度越高 → 热电流愈大特点:分辨力高( 0.1%℃),精度高; 体积小,重量轻
具有多种输出形式,便于使用,批量生产,价格便宜集成化、智能化、微型化
应用:电气元件内置测温、集成测温传感器
5、热敏晶体管与集成温度传感器
五、温度检测
(1) 原理与特点:

(2) 热敏二极管
正向压降: TTe
kT
D
I
e
kUU ln])ln([0
U0 : 0K时的电压k : 波尔兹曼常数e : 电子电荷I : PN结正向电流D、 γ、 α : 常数T : 温度
特点:当电流 I恒定,在一定温度范围内, U T (线性)
应用:常温检测 --- CPU内置的热敏二极管 (英特尔奔腾 M 处理 )温度范围小,一般几十度以内 --- 常温
五、温度检测

(3) 热敏三极管
Be 结导通电压:
)ln(0c
be I
T
e
kTUU
U0 : 0K时的电压k : 波尔兹曼常数e : 电子电荷Ic : 集电极电流 、 γ:常数
特点:当电流 I恒定,在一定温度范围内, Ube T (线性)
应用:大范围测温
测温范围大(几百度),精度较低
五、温度检测

(4) 集成温度传感器 测温部分:
特点:当电流 Ic1 、 Ic2恒定, Ube T (线性) 应用:集成测温、智能测温
集成度高 --- 测温环节 + 放大 + 恒流 + 补偿 + ……
)ln(1
01c
be I
T
e
kTUU
)ln(
202
cbe I
T
e
kTUU
)ln(2
121
c
cbebebe I
I
e
kTUUU
典型: AD590
生产商: AD公司封 装:双端器件测 温: -55~150 ℃灵敏度: 1μA/ K非线性: 0.3 (F.S.)℃
五、温度检测