vwlfn - ieee · d. inversor de tensão trifásico ... g. controlador digital de sinais ... controle...
TRANSCRIPT

Abstract— Most of the wheelchair’s drive systems uses direct-current (DC) motors as propulsion. However, such motors have several drawbacks aspects, as higher cost and maintenance, resulting in its gradual disuse. An option already consolidated in the industrial area is the high efficiency squirrel-cage induction motor, which has high energy efficiency and low maintenance, compared to DC motors. The use of induction motors applied to wheelchair tend to increase with the advancement of microelectronics and power electronics. This paper presents a relevant proposal in drive and control of power wheelchairs through three-phase induction with vector control. The system’s power supply comes from batteries, which are suitable for the static converter. A digital signal controller (DSC) performs the reading joystick and vector control of three-phase induction motor. Experimental results with wheelchair developed denote viability and functionality for paraplegic patients.
Keywords— Induction Motor, Wheelchair, Indirect Field Oriented Control, Digital Signal Processing.
I. INTRODUÇÃO STIMATIVAS indicam que a quantidade mundial de pessoas dependentes de cadeiras de rodas é de
aproximadamente 200 milhões e com um aumento crescente anualmente. Todavia, deste total, apenas 5 a 15% possuem uma cadeira de rodas [1]. O aumento dos índices de indivíduos deficientes, a elevação das taxas de envelhecimento da população mundial, e a ascensão da aceitabilidade de tais no mercado de trabalho mundial, resultam em uma crescente demanda por interfaces com o propósito de auxiliar na mobilidade de deficientes físicos. Uma forma simples de facilitar e melhorar a qualidade de vida de pessoas com deficiência física motora é através de uma cadeira de rodas elétrica, controlada por joystick.
Mobilidade é um fator crucial para o desenvolvimento da habilidade física, cognitiva, comunicativa e social de pessoas com deficiência física. Logo, a cadeira de rodas constitui um mecanismo extremamente importante, onde fatores como elevada eficiência e robustez são imprescindíveis em seu funcionamento. Entretanto, o acionamento convencional de cadeira de rodas é realizado com motores de corrente contínua (CC) [2] [3], os quais apresentam fatores desaforáveis como: elevados índices de custo e manutenção (devido aos comutadores e escovas); alto índice de peso/kW; baixo fator
W. R. B. M. Nunes, Universidade Estadual de Londrina (UEL), Londrina,
Paraná, Brasil, [email protected] N. da Silva, Universidade Estadual de Londrina (UEL), Londrina, Paraná,
Brasil, [email protected] M. R. Covacic, Universidade Estadual de Londrina (UEL), Londrina,
Paraná, Brasil, [email protected] A. P. Leôncio Junior, USIBAN, Londrina, Paraná, Brasil,
[email protected] R. Gaino, Universidade Estadual de Londrina (UEL), Londrina, Paraná,
Brasil, [email protected]
de segurança em razão da existência de arcos e faíscas na comutação de corrente por elemento mecânico; e uma maior escassez comercial quanto a disponibilidade de modelos de alto rendimento [1].
Uma alternativa para tais desvantagens do motor CC é a utilização de motores de indução de alto rendimento, já consolidado e amplamente utilizado em aplicações industriais. Um drive inversor com MOSFET’s para acionamento de motores de indução aplicado em cadeira de rodas com alimentação por baterias foi proposto por [4]. No entanto, uma incompatibilidade dos níveis de tensão dos motores de 380 V com o inversor de 24 Vcc impediu a realização e viabilidade de consolidação de um protótipo com o controle proposto.
Em [5], a pesquisa foi resgatada com testes de propulsão com motores de indução para cadeira de rodas em baixo nível de tensão de alimentação e controle escalar em malha fechada. Resultados satisfatórios de simulação do controle em malha fechada foram obtidos em alta rotação. Porém, tal situação é inconveniente para cadeira de rodas, sendo que o sistema mostrou-se ineficiente para operar em baixa velocidade com controle escalar.
Evidentemente, há poucas propostas de sistemas com motores de indução aplicados a cadeiras de rodas ou sistemas móveis correlatos. Isto se deve principalmente pela alta complexidade envolvida no controle do motor de indução operando em baixa rotação [6] e pela incompatibilidade dos níveis de tensão do motor com o sistema embarcado móvel alimentado por baterias [4].
Sobretudo nos últimos anos, a área de acionamento e controle de motores elétricos sofreu uma rápida expansão, devido principalmente ao avanço nas áreas de semicondutores, eletrônica de potência e culminando com os microprocessadores. Estes avanços tecnológicos têm permitido o desenvolvimento de controladores e acionamento de motores de corrente alternada (CA) com maior eficiência, menor tamanho de hardware, menor dissipação de energia e estruturas de controle cada vez mais complexas. Diante deste panorama, este trabalho desenvolve um esquema de controle mais sofisticado e viável para cadeiras de rodas, utilizando a técnica de controle por campo orientado indireto (IFOC) para o acionamento dos motores de indução de alto rendimento, concedendo torque suficiente em baixas rotações. O comando da cadeira de rodas é realizado por meio de joystick, atendendo um vasto número de pacientes paraplégicos.
Este trabalho está estruturado da seguinte forma: a seção II apresenta o estado da arte dos acionamentos de cadeiras de rodas, III evidencia o hardware, IV apresenta a modelagem do sistema, V destaca o projeto e sintonia dos controladores, VI os resultados obtidos e a seção VII as conclusões do trabalho.
W. R. B M. Nunes, N. da Silva, M. R. Covacic, A. P. Leôncio Junior and R. Gaino
3ph High Efficiency Induction Motors with IFOC Applied to a Wheelchair by Joystick
E
IEEE LATIN AMERICA TRANSACTIONS, VOL. 14, NO. 5, MAY 2016 2041
II. ESTADO DA ARTE As origens das cadeiras de rodas comerciais apontam para
o início da década de 1950 [7]. Em particular, o modelo da cadeira de rodas com dois motores internos se tornou atrativo e um produto em escala comercial. Porém, não possuía ainda um eficiente e robusto sistema de controle em seu acionamento. Com o advento dos microcontroladores, em meados da década de 70, permitiu-se a melhoria de controladores, aumentando a dirigibilidade e segurança das cadeiras.
Diferentes técnicas de comando da cadeira de rodas já foram estudadas e implementadas, tais como comandos por voz, impulsos cerebrais, sopro e sucção. Além do uso de sensoriamento e desvio de obstáculos por infravermelho e ultrassom, bem como a utilização de interfaces com computadores de bordo [2] [8] [9] [10].
Aliado a isto, buscam-se sistemas de controle eficientes e robustos com circuitos de acionamento com maior eficiência energética. O uso de fontes alternativas de energia possibilita melhorar a eficiência energética, como por exemplo, a inserção de painéis fotovoltaicos na estrutura da cadeira de rodas [3] [11]. Além destes, fatores como o uso de motores com maior rendimento e melhorias na técnica de comando e acionamento são aspectos relevantes de pesquisa aplicadas às cadeiras de rodas [12] [13] [14].
Pelo conhecimento dos autores, não foram encontrados trabalhos na literatura com cadeiras de rodas acionadas por motor de indução utilizando controle vetorial e com uso de joystick. Trabalhos recentes realizaram o controle vetorial de cadeiras de rodas com realimentação de corrente [15] [16]. Outras pesquisas foram publicadas com ênfase no controle, modelo não linear e com motor corrente contínua, sendo que estes podem ser alterados para utilização em motor de indução, possibilitando inúmeras vantagens em relação ao motor CC [17] [18] [19].
III. HARDWARE PROPOSTO O sistema embarcado de acionamento dos motores de
indução da cadeira de rodas é apresentado na Fig. 1.
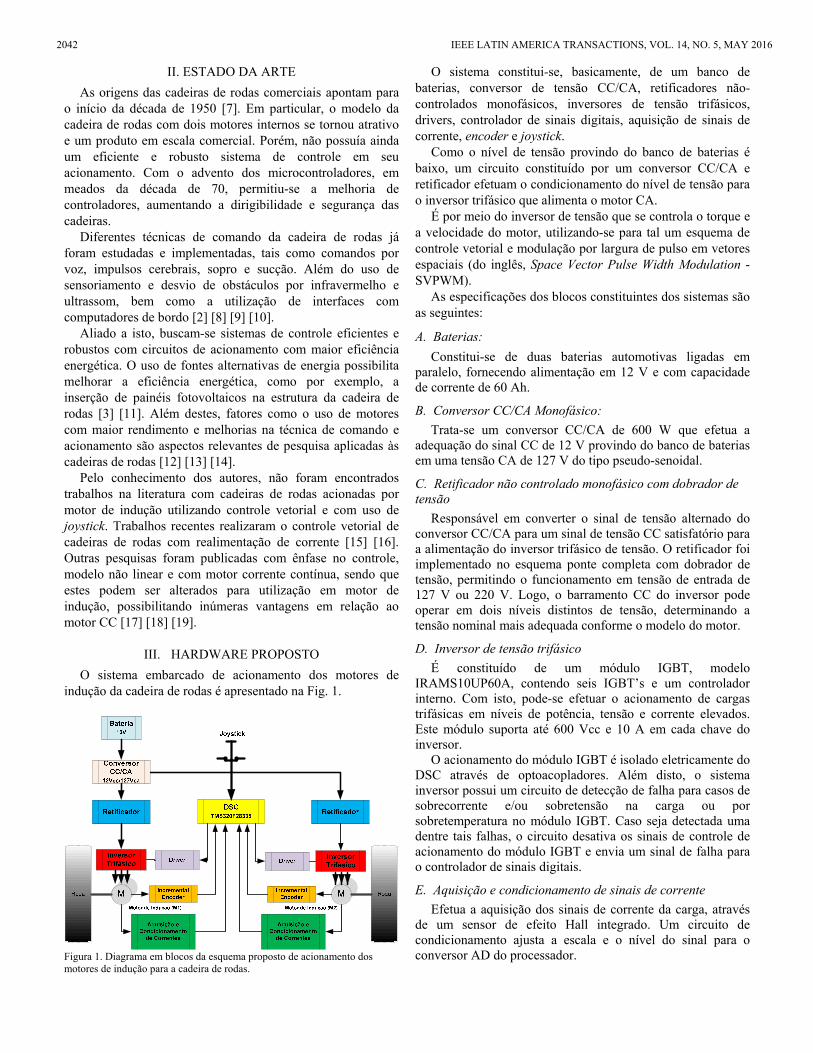
Figura 1. Diagrama em blocos da esquema proposto de acionamento dos motores de indução para a cadeira de rodas.
O sistema constitui-se, basicamente, de um banco de baterias, conversor de tensão CC/CA, retificadores não-controlados monofásicos, inversores de tensão trifásicos, drivers, controlador de sinais digitais, aquisição de sinais de corrente, encoder e joystick.
Como o nível de tensão provindo do banco de baterias é baixo, um circuito constituído por um conversor CC/CA e retificador efetuam o condicionamento do nível de tensão para o inversor trifásico que alimenta o motor CA.
É por meio do inversor de tensão que se controla o torque e a velocidade do motor, utilizando-se para tal um esquema de controle vetorial e modulação por largura de pulso em vetores espaciais (do inglês, Space Vector Pulse Width Modulation -SVPWM).
As especificações dos blocos constituintes dos sistemas são as seguintes:
A. Baterias: Constitui-se de duas baterias automotivas ligadas em
paralelo, fornecendo alimentação em 12 V e com capacidade de corrente de 60 Ah.
B. Conversor CC/CA Monofásico: Trata-se um conversor CC/CA de 600 W que efetua a
adequação do sinal CC de 12 V provindo do banco de baterias em uma tensão CA de 127 V do tipo pseudo-senoidal.
C. Retificador não controlado monofásico com dobrador de tensão
Responsável em converter o sinal de tensão alternado do conversor CC/CA para um sinal de tensão CC satisfatório para a alimentação do inversor trifásico de tensão. O retificador foi implementado no esquema ponte completa com dobrador de tensão, permitindo o funcionamento em tensão de entrada de 127 V ou 220 V. Logo, o barramento CC do inversor pode operar em dois níveis distintos de tensão, determinando a tensão nominal mais adequada conforme o modelo do motor.
D. Inversor de tensão trifásico É constituído de um módulo IGBT, modelo
IRAMS10UP60A, contendo seis IGBT’s e um controlador interno. Com isto, pode-se efetuar o acionamento de cargas trifásicas em níveis de potência, tensão e corrente elevados. Este módulo suporta até 600 Vcc e 10 A em cada chave do inversor.
O acionamento do módulo IGBT é isolado eletricamente do DSC através de optoacopladores. Além disto, o sistema inversor possui um circuito de detecção de falha para casos de sobrecorrente e/ou sobretensão na carga ou por sobretemperatura no módulo IGBT. Caso seja detectada uma dentre tais falhas, o circuito desativa os sinais de controle de acionamento do módulo IGBT e envia um sinal de falha para o controlador de sinais digitais.
E. Aquisição e condicionamento de sinais de corrente Efetua a aquisição dos sinais de corrente da carga, através
de um sensor de efeito Hall integrado. Um circuito de condicionamento ajusta a escala e o nível do sinal para o conversor AD do processador.
2042 IEEE LATIN AMERICA TRANSACTIONS, VOL. 14, NO. 5, MAY 2016
F. Encoder Incremental Exerce a função de sensor de velocidade sobre o eixo da
máquina de indução. O modelo do encoder utilizado é o modelo 1XP8001-1 da Siemens, com uma resolução de 1024 CPR.
G. Controlador Digital de Sinais Trata-se de um DSC (do inglês Digital Signal Controller),
modelo TMS320F28335 da Texas Instruments®. Possui uma CPU de arquitetura Havard, de 32 bits, do tipo
ponto flutuante, com uma velocidade de clock de 150 MHz. Com diversos periféricos disponíveis, tais como: 2 módulos de conversão analógico-digital de 8 canais cada; 2 módulos PWM; 2 codificadores de quadratura (eQEP); entre outros.
H. Driver de corrente Responsável por fornecer um sinal com maior capacidade
de corrente para acionamento dos IGBT’s.
I. Motores de indução Os motores de indução M1 e M2 são de alto rendimento da
SIEMENS, de baixa tensão, conforme ABNT NBR 17094-1, carcaça de alumínio, totalmente fechado e com ventilador externo, categoria N/H, 1060RPM, 0,33CV/0,25KW, 6 pólos, carcaça 71, grau de proteção IPW55, tensões de 220V (ΔΔ), 380V (YY), 440V (Δ).
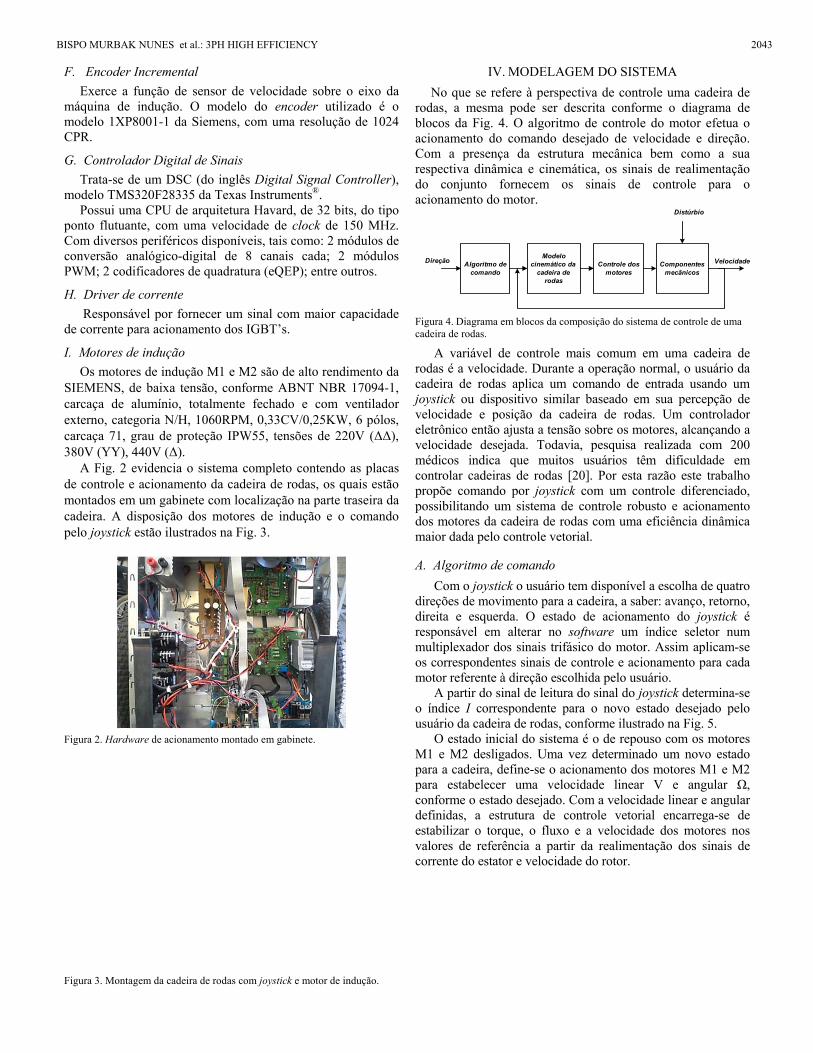
A Fig. 2 evidencia o sistema completo contendo as placas de controle e acionamento da cadeira de rodas, os quais estão montados em um gabinete com localização na parte traseira da cadeira. A disposição dos motores de indução e o comando pelo joystick estão ilustrados na Fig. 3.
Figura 2. Hardware de acionamento montado em gabinete.
Figura 3. Montagem da cadeira de rodas com joystick e motor de indução.
IV. MODELAGEM DO SISTEMA No que se refere à perspectiva de controle uma cadeira de
rodas, a mesma pode ser descrita conforme o diagrama de blocos da Fig. 4. O algoritmo de controle do motor efetua o acionamento do comando desejado de velocidade e direção. Com a presença da estrutura mecânica bem como a sua respectiva dinâmica e cinemática, os sinais de realimentação do conjunto fornecem os sinais de controle para o acionamento do motor.
Algoritmo de comando
Controle dos motores
Componentes mecânicos
Modelo cinemático da
cadeira de rodas
Distúrbio
VelocidadeDireção
Figura 4. Diagrama em blocos da composição do sistema de controle de uma cadeira de rodas.
A variável de controle mais comum em uma cadeira de rodas é a velocidade. Durante a operação normal, o usuário da cadeira de rodas aplica um comando de entrada usando um joystick ou dispositivo similar baseado em sua percepção de velocidade e posição da cadeira de rodas. Um controlador eletrônico então ajusta a tensão sobre os motores, alcançando a velocidade desejada. Todavia, pesquisa realizada com 200 médicos indica que muitos usuários têm dificuldade em controlar cadeiras de rodas [20]. Por esta razão este trabalho propõe comando por joystick com um controle diferenciado, possibilitando um sistema de controle robusto e acionamento dos motores da cadeira de rodas com uma eficiência dinâmica maior dada pelo controle vetorial.
A. Algoritmo de comando Com o joystick o usuário tem disponível a escolha de quatro
direções de movimento para a cadeira, a saber: avanço, retorno, direita e esquerda. O estado de acionamento do joystick é responsável em alterar no software um índice seletor num multiplexador dos sinais trifásico do motor. Assim aplicam-se os correspondentes sinais de controle e acionamento para cada motor referente à direção escolhida pelo usuário.
A partir do sinal de leitura do sinal do joystick determina-se o índice I correspondente para o novo estado desejado pelo usuário da cadeira de rodas, conforme ilustrado na Fig. 5.
O estado inicial do sistema é o de repouso com os motores M1 e M2 desligados. Uma vez determinado um novo estado para a cadeira, define-se o acionamento dos motores M1 e M2 para estabelecer uma velocidade linear V e angular Ω, conforme o estado desejado. Com a velocidade linear e angular definidas, a estrutura de controle vetorial encarrega-se de estabilizar o torque, o fluxo e a velocidade dos motores nos valores de referência a partir da realimentação dos sinais de corrente do estator e velocidade do rotor.
BISPO MURBAK NUNES et al.: 3PH HIGH EFFICIENCY 2043
DireitaV=0Ω<0
AvançoV>0Ω=0
EsquerdaV=0Ω>0
RetornoV<0Ω=0
Repouso
I=1
I=3
I=4
I=1
I=3
I=2
I=5
I=5
I=5
I=5I=1
I=2
I=4
I=2
I=2 I=3
I=4
I=3
I=1
I=4
Início
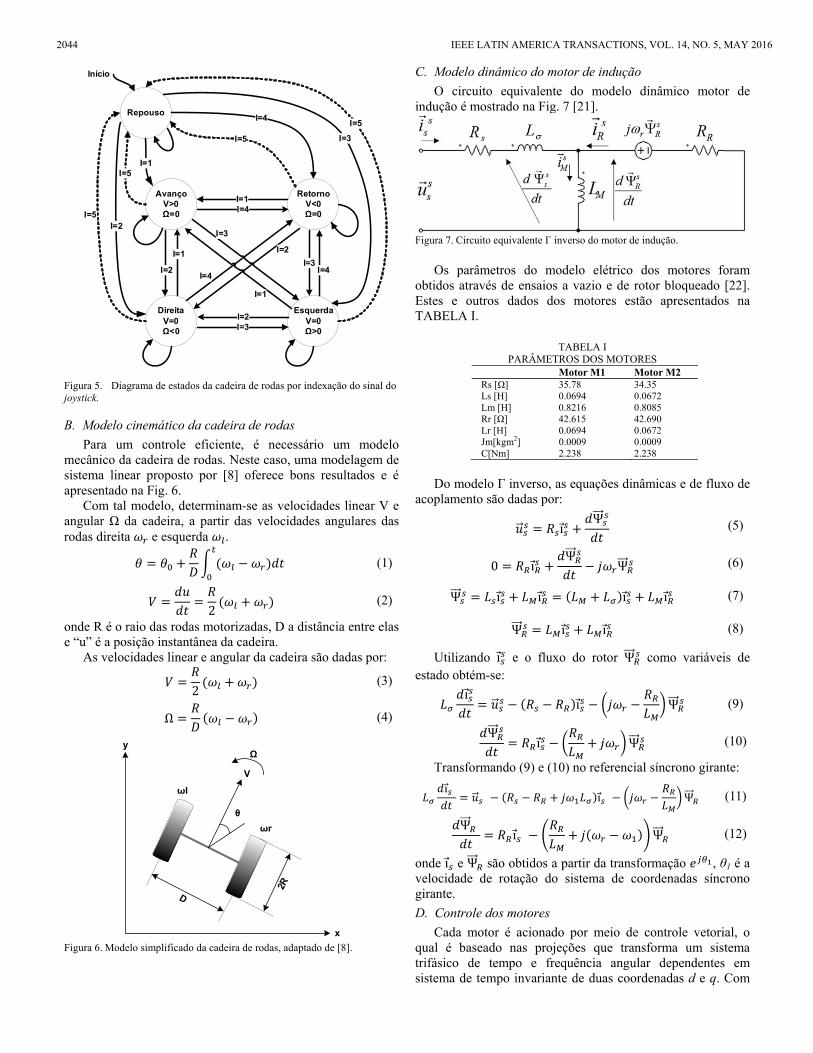
Figura 5. Diagrama de estados da cadeira de rodas por indexação do sinal do joystick.
B. Modelo cinemático da cadeira de rodas Para um controle eficiente, é necessário um modelo
mecânico da cadeira de rodas. Neste caso, uma modelagem de sistema linear proposto por [8] oferece bons resultados e é apresentado na Fig. 6.
Com tal modelo, determinam-se as velocidades linear V e angular Ω da cadeira, a partir das velocidades angulares das rodas direita e esquerda . = + ( − ) (1)
= = 2 ( + ) (2)
onde R é o raio das rodas motorizadas, D a distância entre elas e “u” é a posição instantânea da cadeira.
As velocidades linear e angular da cadeira são dadas por: = 2 ( + ) (3)
Ω = ( − ) (4)
ωl
ωr
D
2R
V
θ
Ωy
x Figura 6. Modelo simplificado da cadeira de rodas, adaptado de [8].
C. Modelo dinâmico do motor de indução O circuito equivalente do modelo dinâmico motor de
indução é mostrado na Fig. 7 [21].
Figura 7. Circuito equivalente Γ inverso do motor de indução.
Os parâmetros do modelo elétrico dos motores foram obtidos através de ensaios a vazio e de rotor bloqueado [22]. Estes e outros dados dos motores estão apresentados na TABELA I.
TABELA I PARÂMETROS DOS MOTORES
Motor M1 Motor M2 Rs [Ω] 35.78 34.35 Ls [H] 0.0694 0.0672 Lm [H] 0.8216 0.8085 Rr [Ω] 42.615 42.690 Lr [H] 0.0694 0.0672 Jm[kgm2] 0.0009 0.0009 C[Nm] 2.238 2.238
Do modelo Γ inverso, as equações dinâmicas e de fluxo de acoplamento são dadas por: = ı + Ψ
(5)
0 = ı + Ψ − Ψ (6) Ψ = ı + ı = ( + )ı + ı (7) Ψ = ı + ı (8)
Utilizando ı e o fluxo do rotor Ψ como variáveis de estado obtém-se: ı = − ( − )ı − − Ψ (9) Ψ = ı − + Ψ (10)
Transformando (9) e (10) no referencial síncrono girante: ı = − ( − + )ı − − Ψ (11) Ψ = ı − + ( − ) Ψ (12)
onde ı e Ψ são obtidos a partir da transformação , θ1 é a velocidade de rotação do sistema de coordenadas síncrono girante. D. Controle dos motores
Cada motor é acionado por meio de controle vetorial, o qual é baseado nas projeções que transforma um sistema trifásico de tempo e frequência angular dependentes em sistema de tempo invariante de duas coordenadas d e q. Com
2044 IEEE LATIN AMERICA TRANSACTIONS, VOL. 14, NO. 5, MAY 2016
esta projeção a estrutura de controle do motor CA torna-se similar a do motor CC.
d,q
α,β
α,β
a,b,c
Vα
Vβ
Vqref
Vdref
SpaceVectorPWM
Inversor3~
Va
Vb
Vc
VDC
d,q
α,β
α,β
a,b,c
ISα
ISβ
Ia
Ib
MotorM13~
Encoder
Ids
A
B
Z
eQEPθsl
ADC
+
+-
-
Iqs
Clarke-1Park-1
ClarkePark
θe
+ +
+-
ωsl
+-
V
+-
Ω
1/R
D/2R
R/2 ++
R/D +-
+
++
Tem ωR ref
ωL ωL ref+
-
ωR
ωL
erm
r
XX
P '
'
34
λ
÷ ×
Ids refedr'λ
mr
rbr
XRpXR
'
' +ω
Iqs ref
θe
∫θr
m
rb
xr 'ω
d,q
α,β
α,β
a,b,c
Vα
Vβ
SpaceVectorPWM
Inversor3~
Va
Vb
Vc
VDC
d,q
α,β
α,β
a,b,c
ISα
ISβ
Ia
Ib
MotorM23~
Encoder
Ids
A
B
Z
eQEPθsl
ADC
+
+-
-
Iqs
Clarke-1Park-1
ClarkePark
θe
+ +ωsl
÷ ×
Ids ref
Iqs ref
θe
∫θr
Joystick
)(1 sCc
pvk
Ωpk
Vqref
Vdref)(2 sCc
)(1 sCω
dH
dH
Tem erm
r
XX
P '
'
34
λedr'λ
mr
rbr
XRpXR
'
' +ω
)(2 sCω
m
rb
xr 'ω
Alg
oritm
o de
co
man
do
Modelo Cinemático Direto e Inverso Controle vetorial IFOC
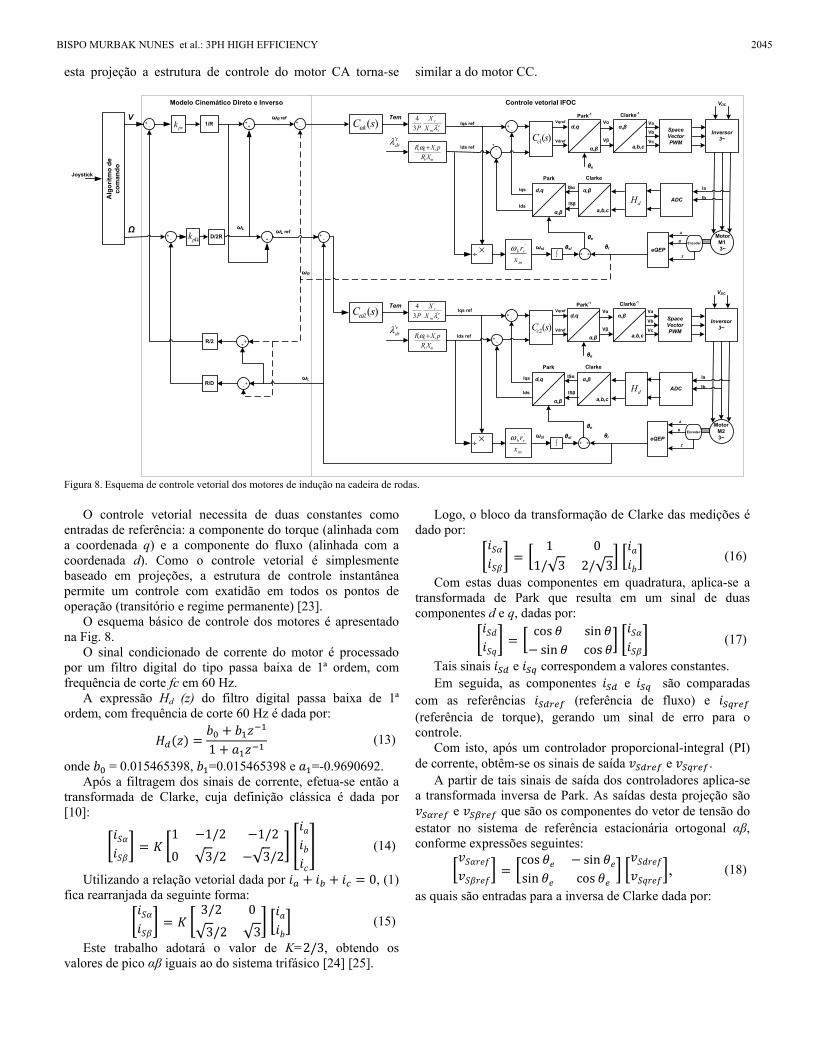
Figura 8. Esquema de controle vetorial dos motores de indução na cadeira de rodas.
O controle vetorial necessita de duas constantes como entradas de referência: a componente do torque (alinhada com a coordenada q) e a componente do fluxo (alinhada com a coordenada d). Como o controle vetorial é simplesmente baseado em projeções, a estrutura de controle instantânea permite um controle com exatidão em todos os pontos de operação (transitório e regime permanente) [23].
O esquema básico de controle dos motores é apresentado na Fig. 8.
O sinal condicionado de corrente do motor é processado por um filtro digital do tipo passa baixa de 1ª ordem, com frequência de corte fc em 60 Hz.
A expressão Hd (z) do filtro digital passa baixa de 1ª ordem, com frequência de corte 60 Hz é dada por: ( ) = +1 + (13)
onde = 0.015465398, =0.015465398 e =-0.9690692. Após a filtragem dos sinais de corrente, efetua-se então a
transformada de Clarke, cuja definição clássica é dada por [10]: = 1 −1/2 −1/20 √3/2 −√3/2 (14)
Utilizando a relação vetorial dada por + + = 0, (1) fica rearranjada da seguinte forma: = 3/2 0√3/2 √3 (15)
Este trabalho adotará o valor de K=2/3, obtendo os valores de pico αβ iguais ao do sistema trifásico [24] [25].
Logo, o bloco da transformação de Clarke das medições é dado por: = 1 01/√3 2/√3 (16)
Com estas duas componentes em quadratura, aplica-se a transformada de Park que resulta em um sinal de duas componentes d e q, dadas por: = cos sin− sin cos (17)
Tais sinais e correspondem a valores constantes. Em seguida, as componentes e são comparadas
com as referências (referência de fluxo) e (referência de torque), gerando um sinal de erro para o controle.
Com isto, após um controlador proporcional-integral (PI) de corrente, obtêm-se os sinais de saída e .
A partir de tais sinais de saída dos controladores aplica-se a transformada inversa de Park. As saídas desta projeção são
e que são os componentes do vetor de tensão do estator no sistema de referência estacionária ortogonal αβ, conforme expressões seguintes: = cos − sinsin cos , (18)
as quais são entradas para a inversa de Clarke dada por:
BISPO MURBAK NUNES et al.: 3PH HIGH EFFICIENCY 2045
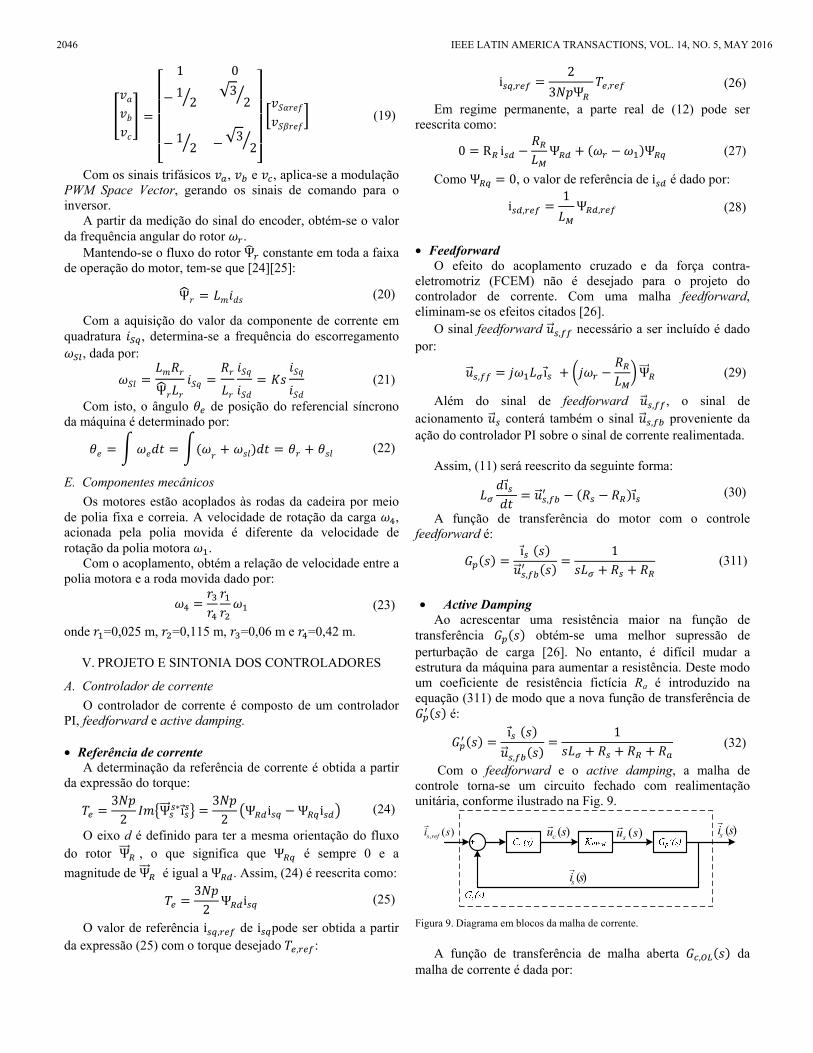
=1 0− 1 2 √3 2
− 1 2 −√3 2 (19)
Com os sinais trifásicos , e , aplica-se a modulação PWM Space Vector, gerando os sinais de comando para o inversor.
A partir da medição do sinal do encoder, obtém-se o valor da frequência angular do rotor .
Mantendo-se o fluxo do rotor Ψ constante em toda a faixa de operação do motor, tem-se que [24][25]: Ψ = (20)
Com a aquisição do valor da componente de corrente em quadratura , determina-se a frequência do escorregamento
, dada por: = Ψ = = (21)
Com isto, o ângulo de posição do referencial síncrono da máquina é determinado por: = = ( + ) = + (22)
E. Componentes mecânicos Os motores estão acoplados às rodas da cadeira por meio
de polia fixa e correia. A velocidade de rotação da carga , acionada pela polia movida é diferente da velocidade de rotação da polia motora .
Com o acoplamento, obtém a relação de velocidade entre a polia motora e a roda movida dado por: = (23)
onde =0,025 m, =0,115 m, =0,06 m e =0,42 m.
V. PROJETO E SINTONIA DOS CONTROLADORES
A. Controlador de corrente O controlador de corrente é composto de um controlador
PI, feedforward e active damping.
• Referência de corrente A determinação da referência de corrente é obtida a partir
da expressão do torque: = 32 Ψ ∗ı = 32 Ψ i − Ψ i (24)
O eixo d é definido para ter a mesma orientação do fluxo do rotor Ψ , o que significa que Ψ é sempre 0 e a magnitude de Ψ é igual a Ψ . Assim, (24) é reescrita como: = 32 Ψ i (25)
O valor de referência i , de i pode ser obtida a partir da expressão (25) com o torque desejado , :
i , = 23 Ψ , (26)
Em regime permanente, a parte real de (12) pode ser reescrita como: 0 = R i − Ψ + ( − )Ψ (27)
Como Ψ = 0, o valor de referência de i é dado por: i , = 1 Ψ , (28)
• Feedforward O efeito do acoplamento cruzado e da força contra-
eletromotriz (FCEM) não é desejado para o projeto do controlador de corrente. Com uma malha feedforward, eliminam-se os efeitos citados [26].
O sinal feedforward , necessário a ser incluído é dado por:
, = ı + − Ψ (29)
Além do sinal de feedforward , , o sinal de acionamento conterá também o sinal , proveniente da ação do controlador PI sobre o sinal de corrente realimentada.
Assim, (11) será reescrito da seguinte forma: ı = , − ( − )ı (30)
A função de transferência do motor com o controle feedforward é: ( ) = ı ( ), ( ) = 1+ + (311)
• Active Damping Ao acrescentar uma resistência maior na função de
transferência ( ) obtém-se uma melhor supressão de perturbação de carga [26]. No entanto, é difícil mudar a estrutura da máquina para aumentar a resistência. Deste modo um coeficiente de resistência fictícia Ra é introduzido na equação (311) de modo que a nova função de transferência de ( ) é: ( ) = ı ( ), ( ) = 1+ + + (32)
Com o feedforward e o active damping, a malha de controle torna-se um circuito fechado com realimentação unitária, conforme ilustrado na Fig. 9.
)(suc
)(, si refs
)(sis
)(sus )(sis
Figura 9. Diagrama em blocos da malha de corrente.
A função de transferência de malha aberta , ( ) da malha de corrente é dada por:
2046 IEEE LATIN AMERICA TRANSACTIONS, VOL. 14, NO. 5, MAY 2016
, ( ) = ( ) ( ) (33)
, ( ) = + (34)
, ( ) = ⁄ +⁄ 1/+ (35)
sendo a constante elétrica = . Os ganhos do controlador de corrente ( ) são obtidos
atentando-se à questão de localização do zero do controlador para cancelar o polo do motor. Sob estas condições, determina-se que: = + +
(36)
Com o cancelamento do polo, a função de transferência da malha de corrente fica da seguinte forma:
, ( ) = = , (37)
A frequência de ganho unitário da função de transferência de malha aberta (37) é , = , .
Seleciona-se a frequência de ganho unitário da malha de corrente para ser aproximadamente de uma a duas ordens de magnitude menor que a frequência de operação do inversor. Portanto, na frequência selecionada de ganho unitário, o ganho integral do controlador é: = (38)
Para tornar o processo ( ) com a mesma largura de banda que do sistema de controle de corrente em malha fechada , ( ), a constante Ra do controle ativo de amortecimento deve ser escolhida de modo a satisfazer: = − − (39)
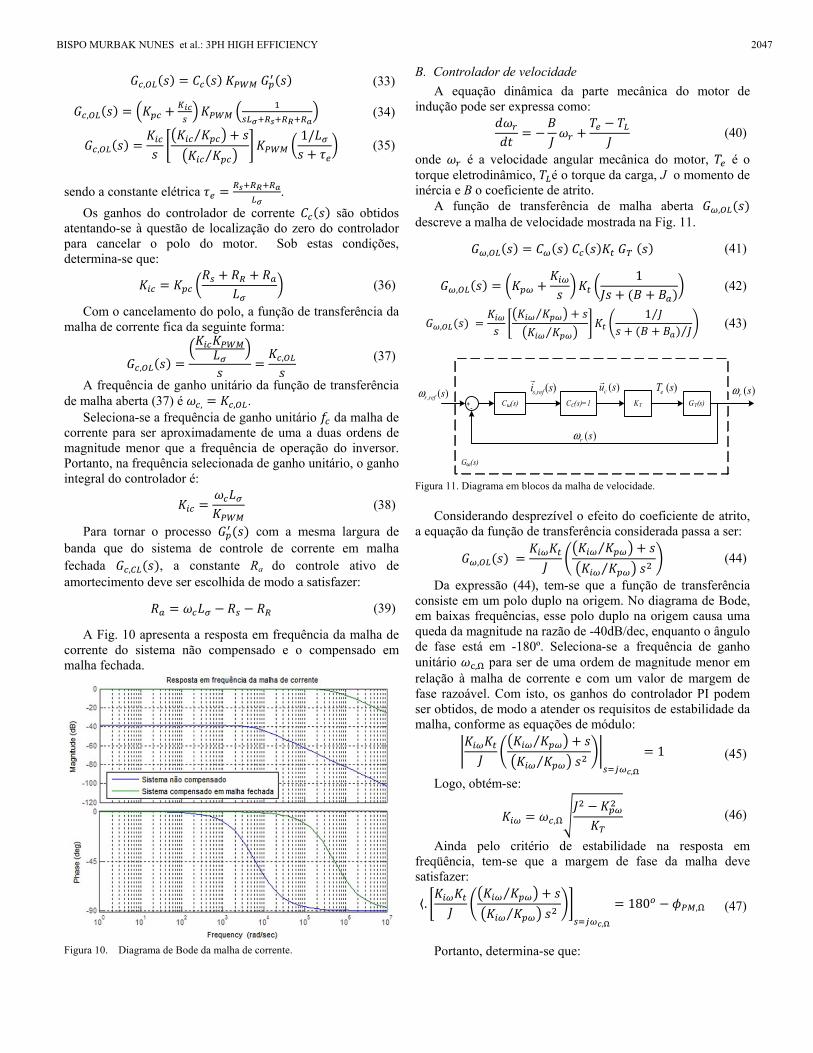
A Fig. 10 apresenta a resposta em frequência da malha de corrente do sistema não compensado e o compensado em malha fechada.
Figura 10. Diagrama de Bode da malha de corrente.
B. Controlador de velocidade A equação dinâmica da parte mecânica do motor de
indução pode ser expressa como: = − + − (40)
onde é a velocidade angular mecânica do motor, é o torque eletrodinâmico, é o torque da carga, J o momento de inércia e B o coeficiente de atrito.
A função de transferência de malha aberta , ( ) descreve a malha de velocidade mostrada na Fig. 11.
, ( ) = ( ) ( ) ( ) (41)
, ( ) = + 1+ ( + ) (42)
, ( ) = ⁄ +⁄ 1⁄+ ( + )⁄ (43)
+-
)(suc
Cω(s))(, srefrω
GT(s)CC(s)=1
)(, si refs
)(sTe
KT
)(srω
)(srω
Gω(s)
Figura 11. Diagrama em blocos da malha de velocidade.
Considerando desprezível o efeito do coeficiente de atrito, a equação da função de transferência considerada passa a ser:
, ( ) = ⁄ +⁄ (44)
Da expressão (44), tem-se que a função de transferência consiste em um polo duplo na origem. No diagrama de Bode, em baixas frequências, esse polo duplo na origem causa uma queda da magnitude na razão de -40dB/dec, enquanto o ângulo de fase está em -180º. Seleciona-se a frequência de ganho unitário , para ser de uma ordem de magnitude menor em relação à malha de corrente e com um valor de margem de fase razoável. Com isto, os ganhos do controlador PI podem ser obtidos, de modo a atender os requisitos de estabilidade da malha, conforme as equações de módulo: ⁄ +⁄ , = 1 (45)
Logo, obtém-se: = , − (46)
Ainda pelo critério de estabilidade na resposta em freqüência, tem-se que a margem de fase da malha deve satisfazer: . ⁄ +⁄ , = 180 − , (47)
Portanto, determina-se que:
BISPO MURBAK NUNES et al.: 3PH HIGH EFFICIENCY 2047
= , 180 − , (48)
A Fig. 12 mostra a resposta em frequência da malha de velocidade do sistema não compensado e com o compensador em malha fechada.
Figura 12. Diagrama de Bode da malha de velocidade.
VI. RESULTADOS Com o modelo cinemático da cadeira de rodas inserido aos
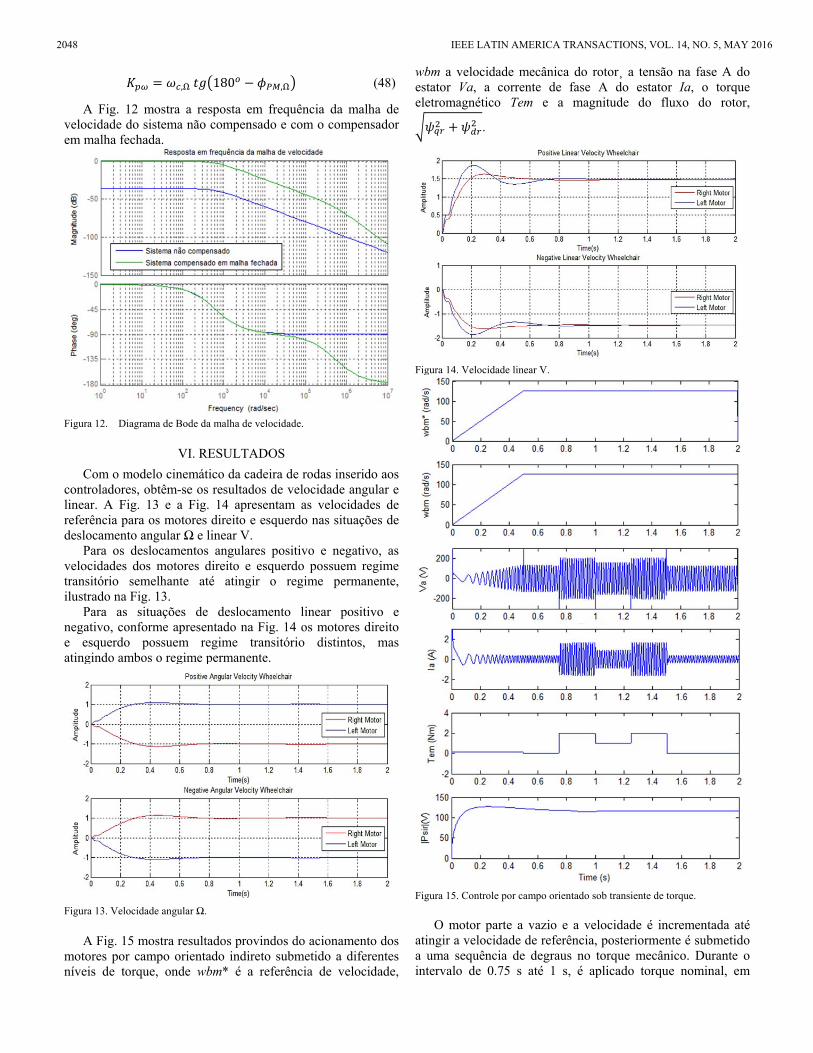
controladores, obtêm-se os resultados de velocidade angular e linear. A Fig. 13 e a Fig. 14 apresentam as velocidades de referência para os motores direito e esquerdo nas situações de deslocamento angular Ω e linear V.
Para os deslocamentos angulares positivo e negativo, as velocidades dos motores direito e esquerdo possuem regime transitório semelhante até atingir o regime permanente, ilustrado na Fig. 13.
Para as situações de deslocamento linear positivo e negativo, conforme apresentado na Fig. 14 os motores direito e esquerdo possuem regime transitório distintos, mas atingindo ambos o regime permanente.
Figura 13. Velocidade angular Ω.
A Fig. 15 mostra resultados provindos do acionamento dos motores por campo orientado indireto submetido a diferentes níveis de torque, onde wbm* é a referência de velocidade,
wbm a velocidade mecânica do rotor¸ a tensão na fase A do estator Va, a corrente de fase A do estator Ia, o torque eletromagnético Tem e a magnitude do fluxo do rotor, + .
Figura 14. Velocidade linear V.
Figura 15. Controle por campo orientado sob transiente de torque.
O motor parte a vazio e a velocidade é incrementada até
atingir a velocidade de referência, posteriormente é submetido a uma sequência de degraus no torque mecânico. Durante o intervalo de 0.75 s até 1 s, é aplicado torque nominal, em
2048 IEEE LATIN AMERICA TRANSACTIONS, VOL. 14, NO. 5, MAY 2016
seguida impõe-se 50% do torque nominal até o instante de tempo 1.25 s, retornando com o torque nominal até o intervalo de tempo de 1.5 s, finalizando a operação do motor a vazio.
A velocidade do motor possui um transitório rápido e suave à referência de velocidade. Com o campo orientado, mantém-se praticamente constante a magnitude do fluxo do rotor sobre as condições simuladas.
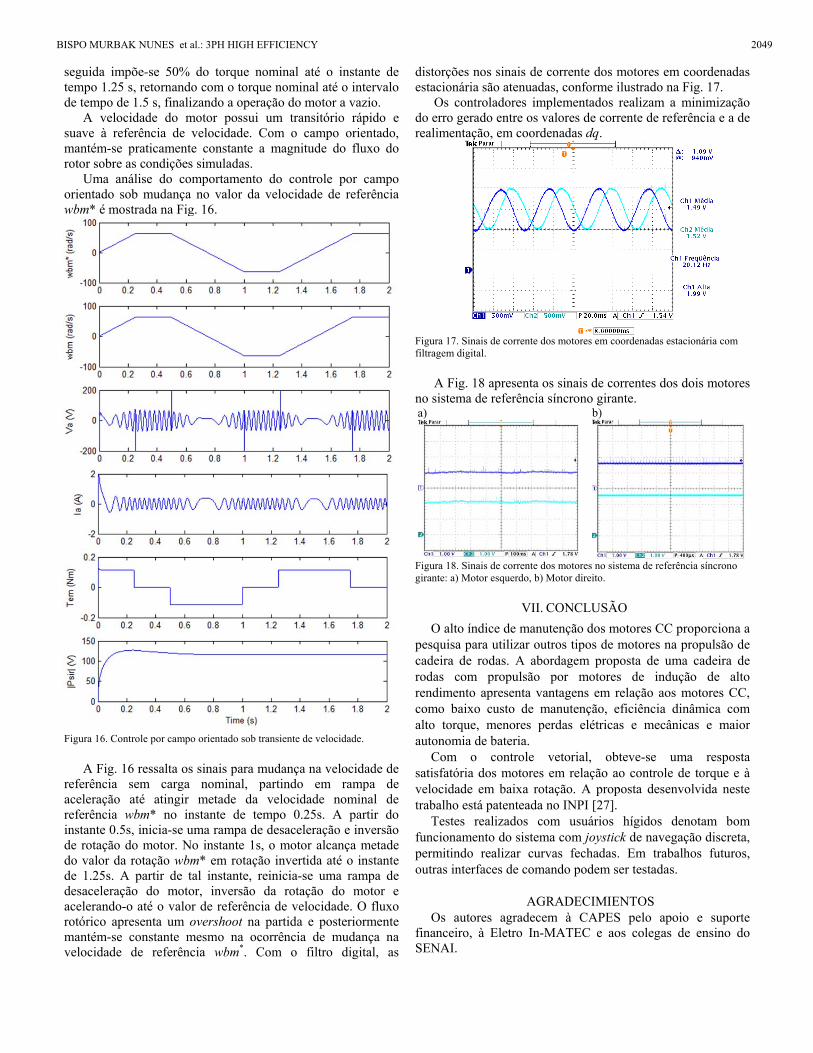
Uma análise do comportamento do controle por campo orientado sob mudança no valor da velocidade de referência wbm* é mostrada na Fig. 16.
Figura 16. Controle por campo orientado sob transiente de velocidade.
A Fig. 16 ressalta os sinais para mudança na velocidade de referência sem carga nominal, partindo em rampa de aceleração até atingir metade da velocidade nominal de referência wbm* no instante de tempo 0.25s. A partir do instante 0.5s, inicia-se uma rampa de desaceleração e inversão de rotação do motor. No instante 1s, o motor alcança metade do valor da rotação wbm* em rotação invertida até o instante de 1.25s. A partir de tal instante, reinicia-se uma rampa de desaceleração do motor, inversão da rotação do motor e acelerando-o até o valor de referência de velocidade. O fluxo rotórico apresenta um overshoot na partida e posteriormente mantém-se constante mesmo na ocorrência de mudança na velocidade de referência wbm*. Com o filtro digital, as
distorções nos sinais de corrente dos motores em coordenadas estacionária são atenuadas, conforme ilustrado na Fig. 17.
Os controladores implementados realizam a minimização do erro gerado entre os valores de corrente de referência e a de realimentação, em coordenadas dq.
Figura 17. Sinais de corrente dos motores em coordenadas estacionária com filtragem digital.
A Fig. 18 apresenta os sinais de correntes dos dois motores no sistema de referência síncrono girante. a)
b)
Figura 18. Sinais de corrente dos motores no sistema de referência síncrono girante: a) Motor esquerdo, b) Motor direito.
VII. CONCLUSÃO O alto índice de manutenção dos motores CC proporciona a
pesquisa para utilizar outros tipos de motores na propulsão de cadeira de rodas. A abordagem proposta de uma cadeira de rodas com propulsão por motores de indução de alto rendimento apresenta vantagens em relação aos motores CC, como baixo custo de manutenção, eficiência dinâmica com alto torque, menores perdas elétricas e mecânicas e maior autonomia de bateria.
Com o controle vetorial, obteve-se uma resposta satisfatória dos motores em relação ao controle de torque e à velocidade em baixa rotação. A proposta desenvolvida neste trabalho está patenteada no INPI [27].
Testes realizados com usuários hígidos denotam bom funcionamento do sistema com joystick de navegação discreta, permitindo realizar curvas fechadas. Em trabalhos futuros, outras interfaces de comando podem ser testadas.
AGRADECIMIENTOS
Os autores agradecem à CAPES pelo apoio e suporte financeiro, à Eletro In-MATEC e aos colegas de ensino do SENAI.
BISPO MURBAK NUNES et al.: 3PH HIGH EFFICIENCY 2049

REFERÊNCIAS [1] Chipaila, C.M.; Grigore, D.; Marin, G.; Solea, R.; Cernega, D.C.,
"Hardware and software solutions for a conventional electric-powered wheelchair," In: System Theory, Control and Computing (ICSTCC), 2012 16th International Conference on, 12-14, Oct. 2012, pp.1,6
[2] Gentilho Junior, E.; Rosa Filho, J. E. A.; Biazeto, A. R.; Covacic, M. R.; Carvalho, A. A. de; Teixeira, M. C. M.; Sanchez, M. A.; Kozany, R. F.; Junqueira, M. V. N.; Gaino, R. Controle implementado em DSP para cadeira de rodas acionada por sopro e sucção. In: XI Simpósio Brasileiro de Automação Inteligente (SBAI), Fortaleza, Oct 2013.
[3] Gurrama, A. M.; Raoa, P.S.V. R.; Dontikurtia, R. Solar Powered Wheel Chair: Mobility For Physically Challenged. International Journal of Current Engineering and Technology, Vol.2, No.1, March 2012.
[4] Barnard, J.M.; Van Wyk, J.D.; Dunford, W.G., "A new drive system for battery operated wheelchairs using 3-phase cage rotor induction machines," Industrial Electronics, Control, Instrumentation, and Automation, 1992. Power Electronics and Motion Control., Proceedings of the 1992 International Conference, vol.1, 9-13, Nov 1992, pp.138,143.
[5] Chew, H.W.V.; Inigo, Rafael M., "Electric wheel-chair propulsion by induction motors," In: Southeastcon '96. Bringing Together Education, Sci-ence and Technology., Proceedings of the IEEE, 11-14, Apr 1996, pp.37,40.
[6] Inigo, R.M.; Shafik, K. T.; Churillo, F. M.; Pence, J. R., "Advances in Electric Wheelchair Propulsion Systems," Medical Instrument Design, 1991. IEEE Case Studies in, pp. 204, 220, 29-30, Oct 1991.
[7] Dan Ding; Cooper, R.A., "Electric powered wheelchairs," Control Systems, IEEE , vol.25, no.2, April 2005, pp.22,34.
[8] Mazo, M., Rodriguez, F. J., Lázaro, J. L., Ureña, J., García, J. C., Santiso, E.; Revenga, P. A. García, J. J. Wheelchair for physically disabled people with voice, ultrasonic and infrared sensor control. Autonomous Robots, Volume 2, Issue 3, 1995, pp 203-224.
[9] Barea, R; Boquete, L.; Mazo, M; López, E. “System for Assisted Mobility Using Eye Movements Based on Electrooculography”. IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 10, no. 4, Dec. 2002
[10] Filgueira, P. N. dos S. Robotização de uma cadeira de rodas. Dissertação de Mestrado em Engenharia Elétrica. Universidade Federal do Espirito Santo. Vitória, 2011.
[11] Jun-Uk Chu; In-Hyuk Moon; Gi-Won Choi; Jei-Cheong Ryu; Mu-seong Mun, "Design of BLDC motor controller for electric power wheelchair," Mechatronics, 2004. ICM '04. Proceedings of the IEEE International Conference on , vol., no., pp.92,7e, 3-5 June 2004
[12] Kung, Ying-Shieh; Wang, Ming-Shyan; Yang, Chih-Yuan, "Realization of a motion control IC for electric-powered wheelchair," Industrial Informatics (INDIN), 2010 8th IEEE International Conference on , vol., no., pp.523,528, 13-16 July 2010
[13] Chipaila, C.M.; Grigore, D.; Marin, G.; Solea, R.; Cernega, D.C., "Hardware and software solutions for a conventional electric-powered wheelchair," System Theory, Control and Computing (ICSTCC), 2012 16th International Conference on , vol., no., pp.1,6, 12-14 Oct. 2012
[14] Jose, M.A.; Martinazzo, A.A.G.; Biazon, L.C.; Ficheman, I.K.; Lopes, R.D.; Zuffo, M.K., "Power wheelchair open platform," Biomedical Robotics and Biomechatronics (2014) 5th IEEE RAS & EMBS International Conference on , vol., no., pp.455,460, 12-15 Aug. 2014
[15] Nunes, W. R. B. M., Silva, N. da, Gaino, R., Covacic, M. R., Leoncio Junior, A. P., Cadeira de rodas com motores de indução trifásicos, controle vetorial e comando por joystick, In: XXIV Congresso Brasileiro de Engenharia Biomédica, SBEB, Out 2014, pp. 1887-1891
[16] Nunes, W. R. B. M., Silva, N. da, Gaino, R., Covacic, M. R., Leoncio Jr., A. P, Rodrigues, M. V. M., Motores de indução trifásicos de alto rendimento com controle vetorial aplicado a sistema embarcado de cadeira de rodas com comando por joystick, In: Institute of Electrical and Electronics Engineers (IEEE) and Industry Applications Society (IAS), Dec 2014.
[17] Rossini, F. L. Projeto de controlador robusto aplicado à cadeira de rodas móveis via abordagem por LMI’s. Dissertação de mestrado em Engenharia Elétrica, Universidade Estadual de Londrina, Londrina, 2013.
[18] Santos, N. M. dos. Projeto de Controladores Robustos em Modelos Não-lineares Utilizados em Engenharia Biomédica: Pacientes Paraplégicos e Tetraplégicos. Dissertação de mestrado em Engenharia Elétrica, Universidade Estadual de Londrina, Londrina, 2014.
[19] Nanda, G.; Kar, N.C., "A Survey and Comparison of Characteristics of Motor Drives Used in Electric Vehicles," Electrical and Computer Engineering, 2006. CCECE '06. Canadian Conference on, pp.811,814, May 2006.
[20] L. Fehr, W.E. Langbein, and S.B. Skaar, “Adequacy of power wheelchair control interfaces for persons with severe disabilities: A clinical survey,” J. Rehab. Res. Dev., vol. 37, no. 3, 2000, pp. 353–360.
[21] Harnefors, L.; Nee, H. P. Model Based Current Control of AC Machines using the Internal Model Control Method. IEEE Transactions on Industry Applications. N. 1, V. 34: IEEE. Jan-Feb 1998. p. 133-141.
[22] IEEE Standard Test Procedure for Polyphase Induction Motors and Generators," IEEE Std 112-2004 (Revision of IEEE Std 112-1996), vol., no., pp.0_1,79, 2004
[23] Quang, N. P., Dittrich, J. A. Vector Control of Three-Phase AC Machines: System Development in the Practice. Springer, 2008
[24] Bose, Bimal K. “Modern Power Electronics and AC drives.” Upper Saddle River: Prentice Hall, 2001, p368-78.
[25] Ong, C-M. Dynamic Simulations of Electric Machinery: Using Matlab/Simulink. Prentice Hall, 1998.
[26] Cheng, Q, Yuan, L. Vector control of an Induction Motor based on a DSP. Chalmers University of Technology, Departament of Eletric Power Engineering. Master of Science Thesis. Goteborg, Sweden. 2011.
[27] Gaino, R., Silva, N. da, Covacic, M. R., Nunes, W. R. B. M., Leoncio Jr., A. P. Patente depositada: “Motorizaçào de cadeira de rodas por motores de indução trifásicos com controle vetorial e comando por joystick e sopro/sucção”, INPI, AINTEC/UEL, nº BR10-2014-022994-9, 17 Set 2014.
Willian Ricardo Bispo Murbak Nunes é graduado em Engenharia Elétrica pela Universidade Estadual de Londrina (UEL), em 2012. Especialista em Engenharia de Automação Industrial pelo SENAI/SC, em 2014. Mestre em Engenharia Elétrica na Universidade Estadual de Londrina, em 2015.
Doutorando em Engenharia Elétrica na UNESP, Ilha Solteira. Professor da Faculdade de Tecnologia SENAI Londrina e UNOPAR, ministrando disciplinas de Máquinas Elétricas e Microcontroladores. Atualmente suas pesquisas se concentram na área de conversores para máquinas elétricas CA/CC e controle aplicado na área de Engenharia Biomédica.
Newton da Silva é Doutor em Engenharia Elétrica (2012) pela Unicamp, mestre em Engenharia Elétrica (1994) pela Universidade Federal de Santa Cataria e Engenheiro Eletricista (1991) pela Universidade Federal de Santa Maria. É professor da Universidade Estadual de Londrina desde 2003. Suas áreas
de interesse são de eletrônica de potência, filtros para compensação de harmônicos, controle digital de conversores estáticos, circuitos elétricos, condicionamento analógicos de sinais, qualidade de energia.
Márcio Roberto Covacic nasceu em Tupaciguara-MG, Brasil, em 1976. Possui graduação em Engenharia Elétrica pela Universidade Estadual Paulista Júlio de Mesquita Filho (1998), mestrado em Engenharia Elétrica pela Universidade Estadual Paulista Júlio de Mesquita Filho (2001) e doutorado em Engenharia Elétrica pela Universidade Estadual Paulista Júlio
de Mesquita Filho (2006), Ilha Solteira, São Paulo, Brasil. Atualmente é Professor Adjunto da Universidade Estadual de Londrina. Tem experiência na área de Engenharia Elétrica, com ênfase em Eletrônica Industrial, Sistemas e Controles Eletrônicos. Suas áreas de interesse incluem teoria de controle e aplicações, projetos embasados em desigualdades matriciais lineares, controle com estrutura variável e sistemas fuzzy.
Antônio Pires Leôncio Júnior graduado de Tecnologia em Eletrotécnica pela Universidade Tecnológica Federal do Paraná (2002) e Licenciatura Plena em Formação Pedagógica para Educação Profissional pela Universidade do Sul de Santa Catarina UNISUL (2011), Especialista em Docência do Ensino
Superior pela FAFIPA (2009), Mestrando em Engenharia Elétrica na Universidade Estadual de Londrina (UEL). Atua no ramo de Automação e Instrumentação Industrial na USIBAN e como técnico de ensino no SENAI/PR-SAP.
2050 IEEE LATIN AMERICA TRANSACTIONS, VOL. 14, NO. 5, MAY 2016

Ruberlei Gaino é graduado em Engenharia Elétrica (1996), mestrado (2000) e doutorado (2009) pela UNESP-Universidade Estadual Paulista Júlio de Mesquita Filho, Ilha Solteira, São Paulo, Brasil. Professsor da Universidade Estadual de Londrina desde 2000, atualmente é Professor Adjunto do Departamento
de Engenharia Elétrica da UEL. Consultor ad hoc da CAPES e FUNDAÇÃO ARAUCÁRIA. Tem experiência na área de Engenharia Elétrica, com ênfase em controle no tempo contínuo e discreto, controle robusto, LQG/LTR, dinâmica de máquinas elétricas, sistemas lineares e não-lineares, fuzzy Takagi Sugeno, LMI, identificação de sistemas por mínimos quadrados, engenharia de reabilitação, cadeira de rodas, Eletroestimulação, Biomecânica, LabView, paraplegia, automação e CLP.
BISPO MURBAK NUNES et al.: 3PH HIGH EFFICIENCY 2051