vektorové řízení asynchronních motor...
TRANSCRIPT
Digital Control of Electric Drives
B1M14DEP 1
Vektorové řízení asynchronních motorů
České vysoké učení technickéFakulta elektrotechnická
O. Zoubek
2
MOTIVACE
● Nevýhody skalárního řízení U/f: ● Velmi nízká dynamika
Změny v asynchronním stroji probíhají rychlostí danou časovou konstantou rotoru (tj. až vteřiny u velkých strojů)
● Zadání je frekvence – není možné přímo řídit moment AM● Nevhodné pro trakci● Moment motoru je závislý na skluzové frekvenci - ta je navíc
stále stejná (procentuálně se s nižší výstupní frekvencí měniče zvyšuje)
B1M14DEP 2
3
MOTIVACE
● Výhody skalárního řízení U/f:● Jednoduchost řízení (zejména vývoj)
● Výhody vektorového řízení oproti skalárnímu:● Nesrovnatelně vyšší dynamika● Možnost práce od nulových otáček (u některých typů VŘ včetně
stojícího rotoru)● Vstupem pro pohon je požadavek na moment (plynová páka)● Vhodnost pro trakci● Proud v asynchronním motoru je plně pod kontrolou● Možnost krátkodobého přetížení a práce s vyšším momentem,
než je moment zvratu● K přechodu od skalárního k vektorovému řízení stačí ve většině
případů pouze změna software
B1M14DEP 3
4
SKALÁRNÍ x VEKTOROVÉ ŘÍZENÍ
● Moment souvisí s proudy● Moment jakéhokoli elektrického stroje ≈ proud● Dynamika elektrického stroje ≈ rychlé změny proudů● Rychlé změny proudů vyžadují napětí (vinutí stroje má
induktivní charakter)● Ke zvýšení dynamiky je potřeba přímo ovládat proudy
(u asynchronního motoru s kotvou nakrátko přichází v úvahu pouze proudy statoru), což pouhým řízením U/f udělat nelze
B1M14DEP 4
5
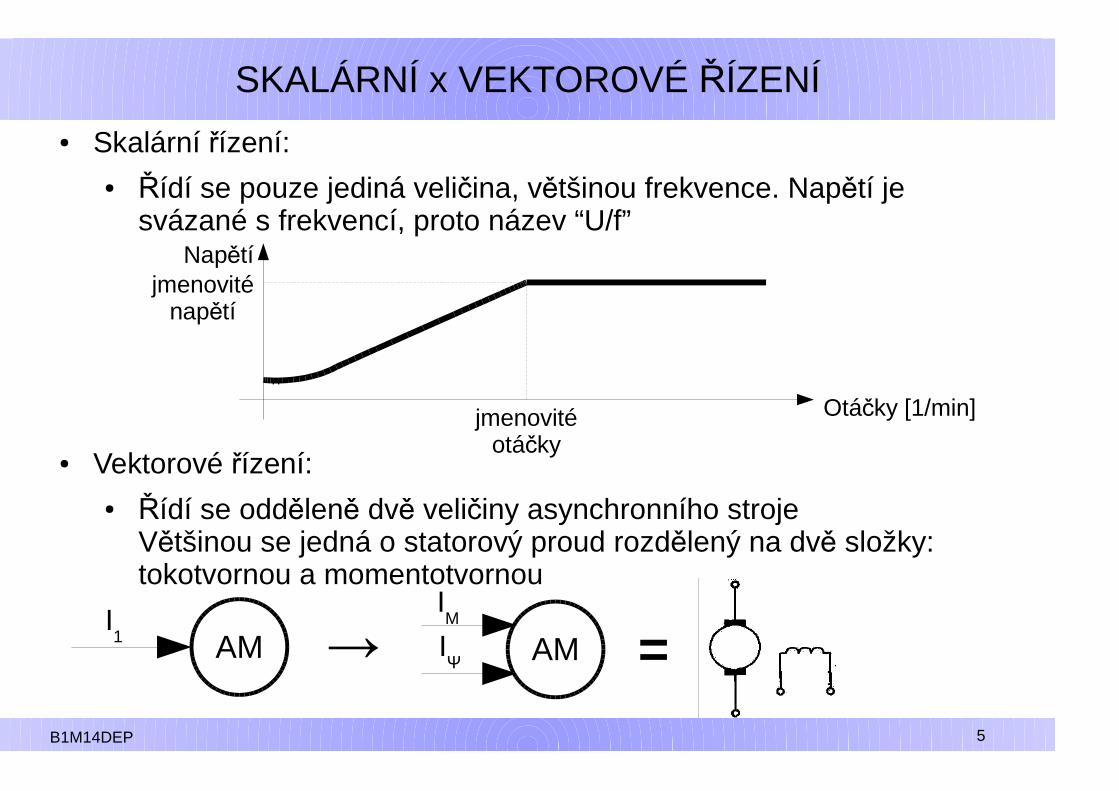
SKALÁRNÍ x VEKTOROVÉ ŘÍZENÍ
● Skalární řízení:● Řídí se pouze jediná veličina, většinou frekvence. Napětí je
svázané s frekvencí, proto název “U/f”
● Vektorové řízení:● Řídí se odděleně dvě veličiny asynchronního stroje
Většinou se jedná o statorový proud rozdělený na dvě složky: tokotvornou a momentotvornou
Otáčky [1/min]
Napětí
jmenovitéotáčky
jmenoviténapětí
AMI1 AM
IM
IΨ→ =
B1M14DEP 5
6
+
CR
Prescaler(Předdělička)
Up-Down Counter(Obousměrný čítač)
Comparator(Komparátor )
Compare Register(Porovnávaná hodnota )
Program
DeadTime
&OutputLogic
Clock(Takt)
Int
Carrier Wave Code(Kód nosné vlny)
Modulation Wave Value(Kód modulačního průběhu )
Žádost o obsluhu
Generování mrtvých doba výstupní logika
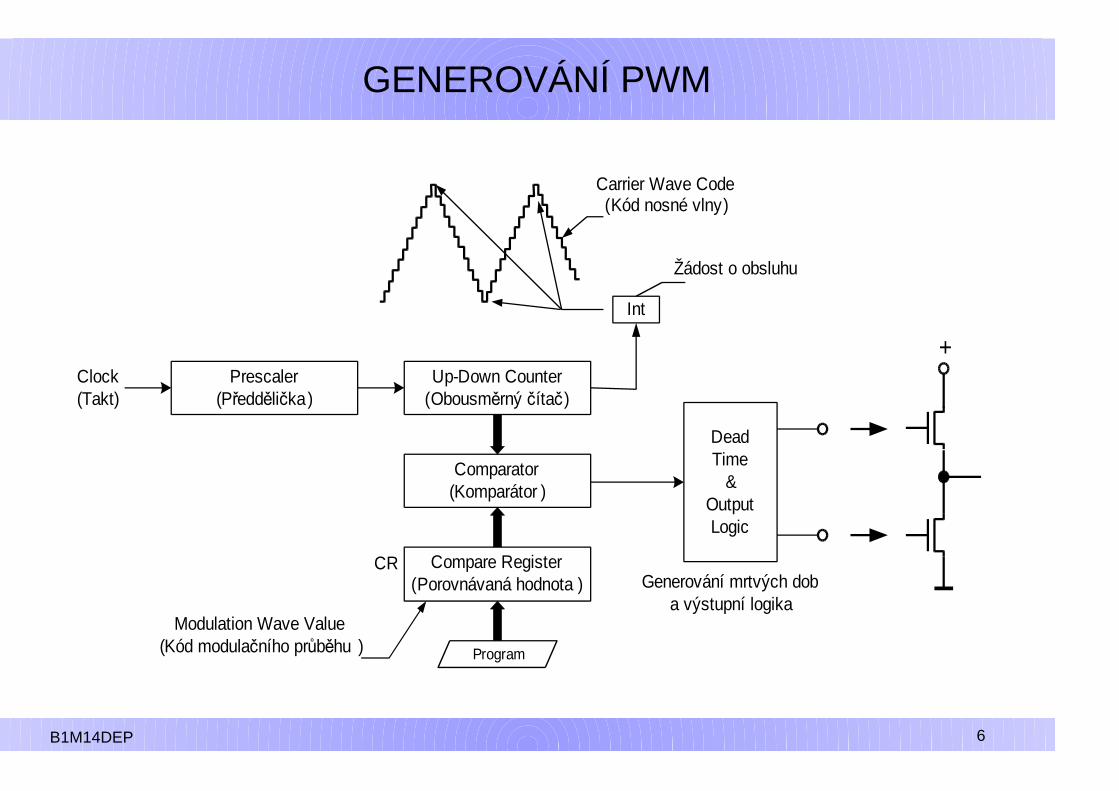
GENEROVÁNÍ PWM
B1M14DEP 6
7
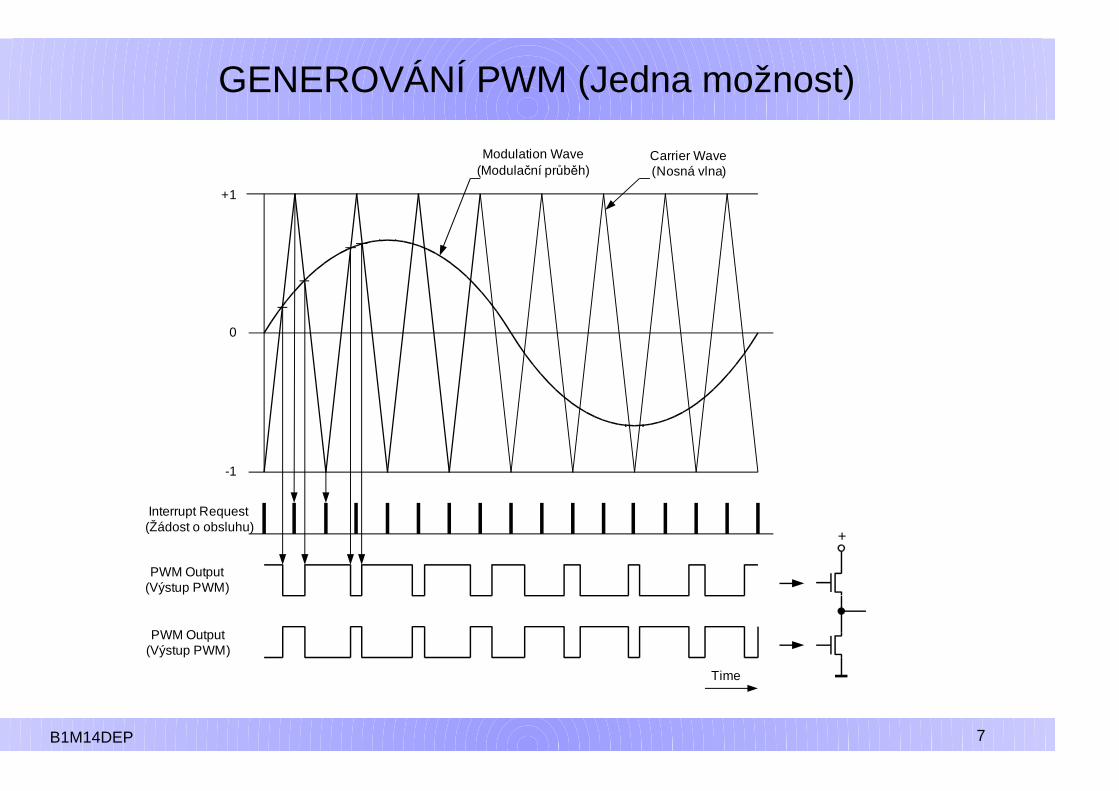
GENEROVÁNÍ PWM (Jedna možnost)
B1M14DEP 7
+
Carrier Wave(Nosná vlna)
Modulation Wave(Modulační průběh)
Interrupt Request(Žádost o obsluhu)
PWM Output(Výstup PWM)
Time
+1
-1
0
PWM Output(Výstup PWM)
8
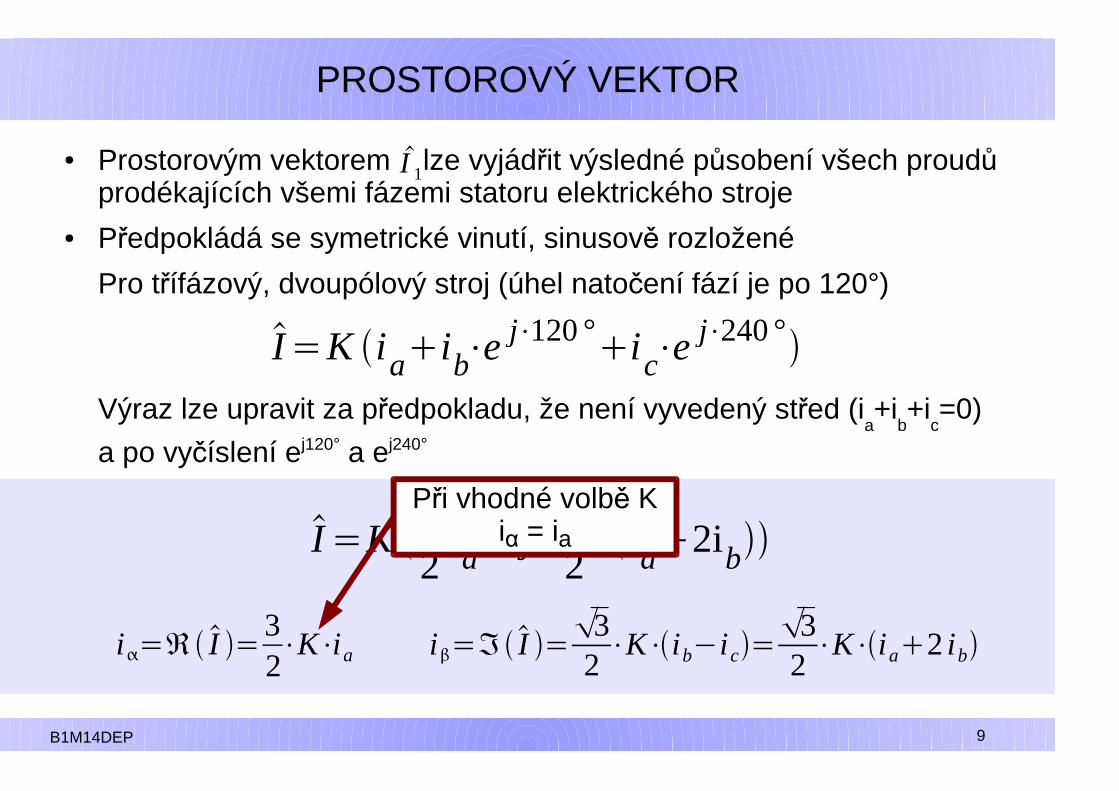
PROSTOROVÝ VEKTOR
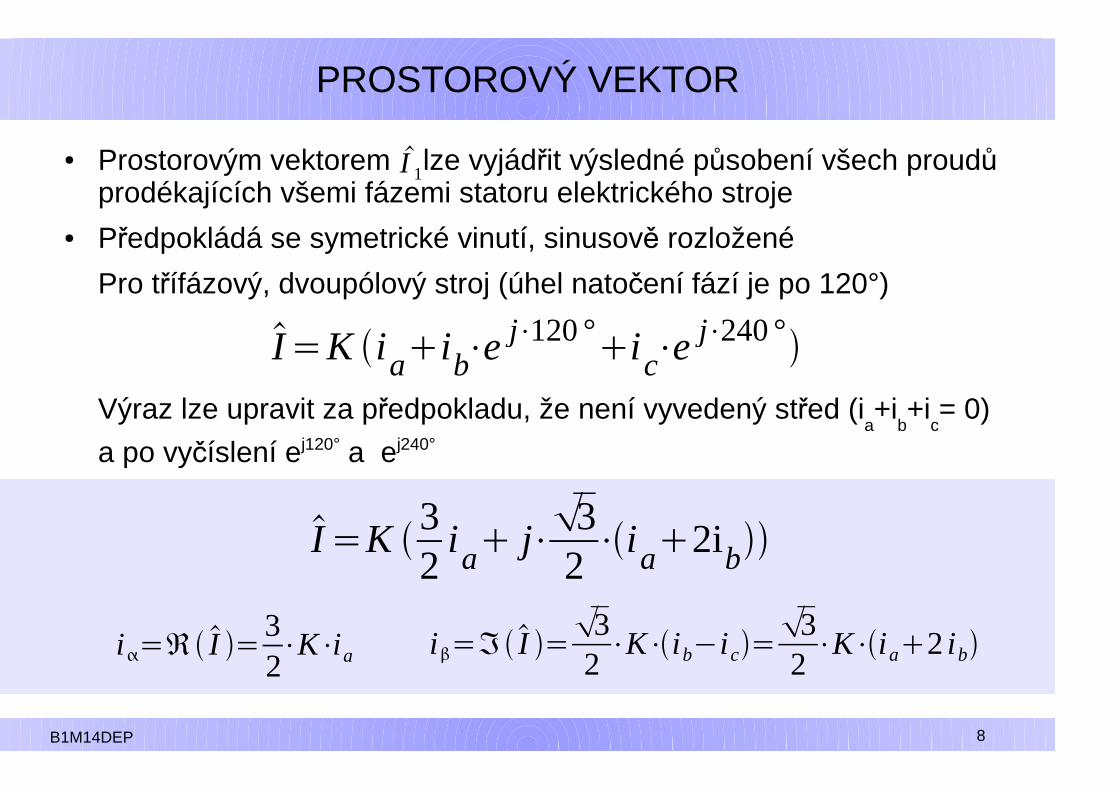
● Prostorovým vektorem lze vyjádřit výsledné působení všech proudů prodékajících všemi fázemi statoru elektrického stroje
● Předpokládá se symetrické vinutí, sinusově rozložené
Pro třífázový, dvoupólový stroj (úhel natočení fází je po 120°)
Výraz lze upravit za předpokladu, že není vyvedený střed (ia+i
b+i
c= 0)
a po vyčíslení ej120° a ej240°
I 1
I=K i aib⋅ej⋅120 °i c⋅e
j⋅240 °
i =ℜ I =32⋅K⋅i a
I=K 32
i a j⋅32⋅i a2ib
i =ℑI =32⋅K⋅i b i c=
32⋅K⋅i a2 i b
B1M14DEP 8
9
PROSTOROVÝ VEKTOR
● Prostorovým vektorem lze vyjádřit výsledné působení všech proudů prodékajících všemi fázemi statoru elektrického stroje
● Předpokládá se symetrické vinutí, sinusově rozložené
Pro třífázový, dvoupólový stroj (úhel natočení fází je po 120°)
Výraz lze upravit za předpokladu, že není vyvedený střed (ia+i
b+i
c=0)
a po vyčíslení ej120° a ej240°
I 1
I=K i aib⋅ej⋅120 °i c⋅e
j⋅240 °
i =ℜ I =32⋅K⋅i a
I=K 32
i a j⋅32⋅i a2ib
i =ℑI =32⋅K⋅i b i c=
32⋅K⋅i a2 i b
Při vhodné volbě Kiα = ia
B1M14DEP 9
10
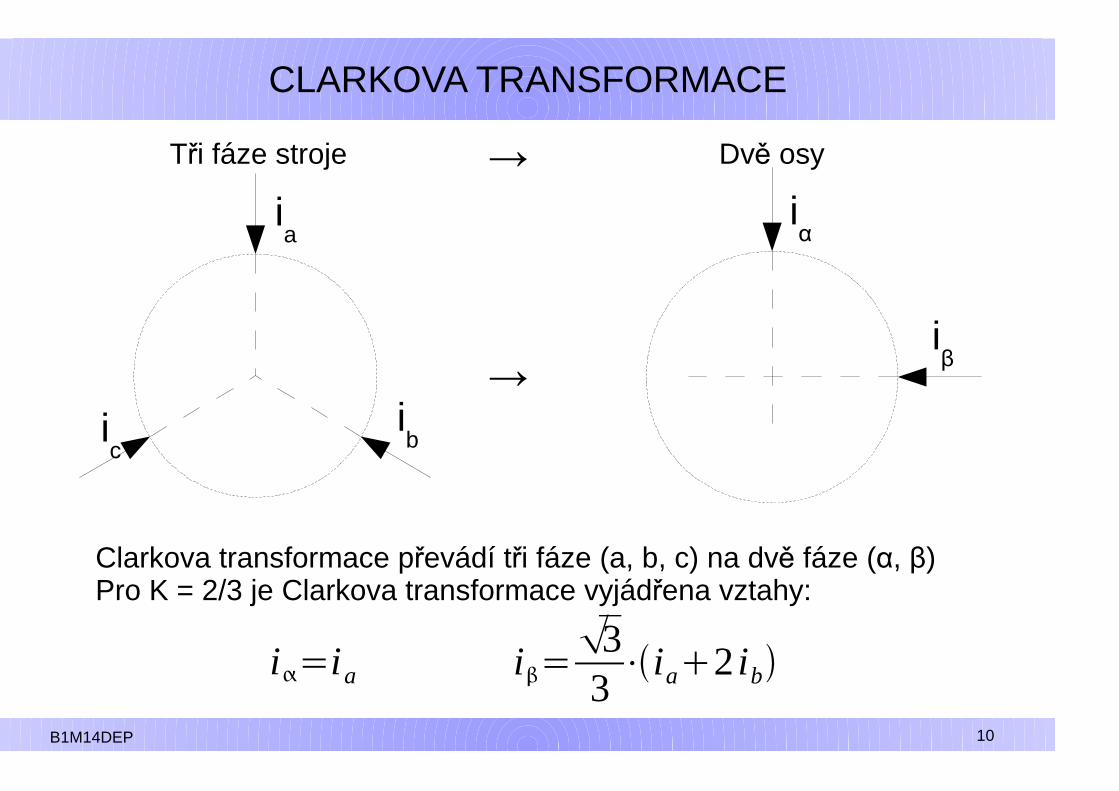
CLARKOVA TRANSFORMACE
ia
ibi
c
iα
iβ
Clarkova transformace převádí tři fáze (a, b, c) na dvě fáze (α, β)Pro K = 2/3 je Clarkova transformace vyjádřena vztahy:
Tři fáze stroje →
→
Dvě osy
i=i a i =33⋅i a2 i b
B1M14DEP 10
11
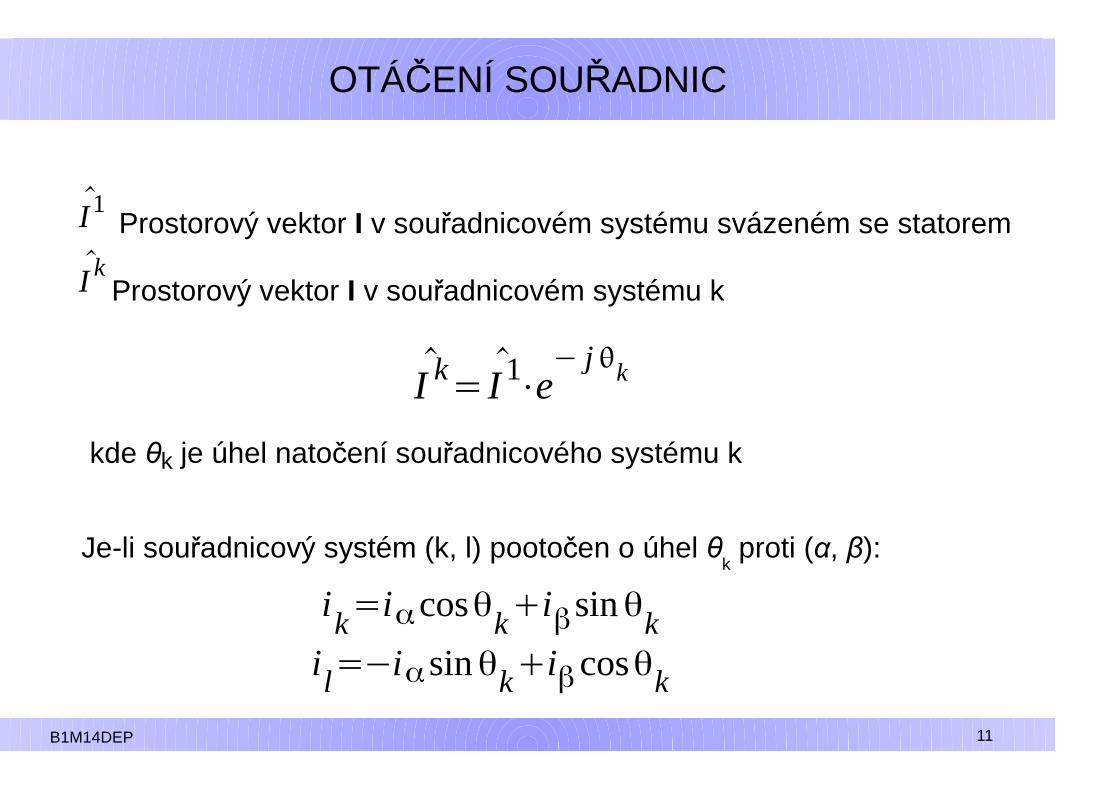
OTÁČENÍ SOUŘADNIC
Prostorový vektor I v souřadnicovém systému svázeném se statorem
Prostorový vektor I v souřadnicovém systému k
kde θk je úhel natočení souřadnicového systému k
I 1
I k
I k=
I 1⋅e
j k
ik=iαcosθ
k+iβsinθ
ki l= iαsinθk+iβcosθk
Je-li souřadnicový systém (k, l) pootočen o úhel θk proti (α, β):
B1M14DEP 11
12
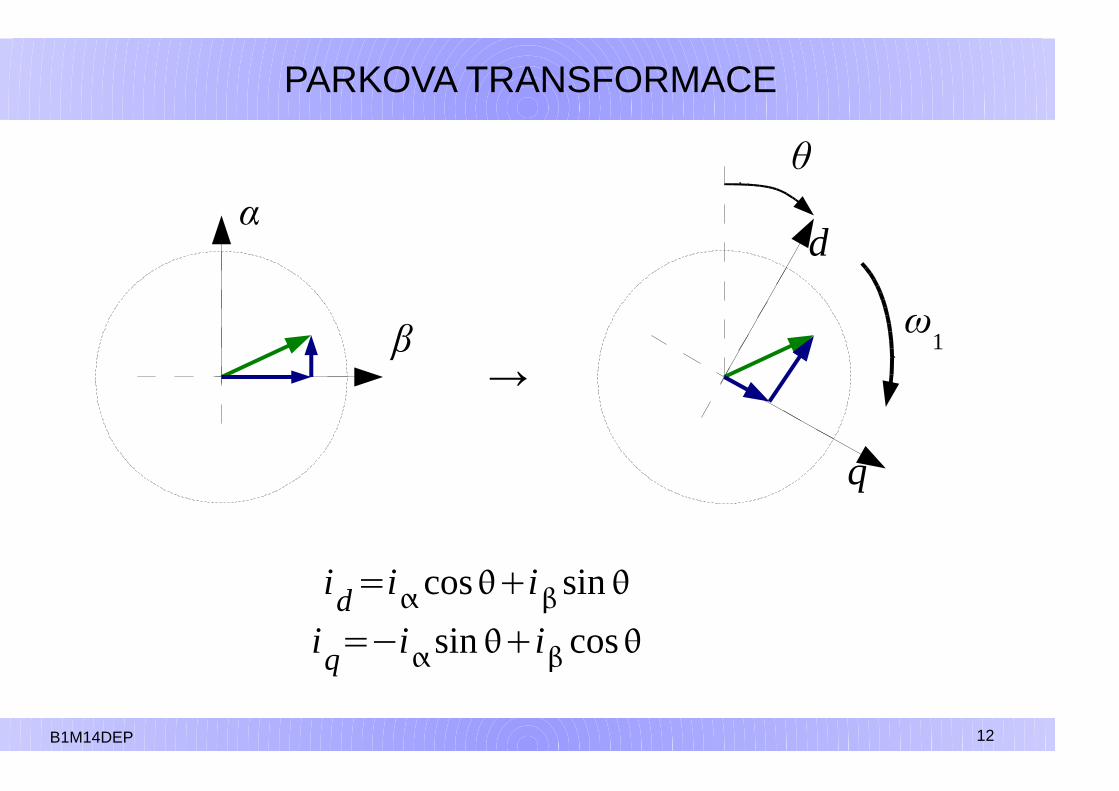
PARKOVA TRANSFORMACE
α
→
ω1
id=icosi sin
iq= isini cos
θ
β
d
q
B1M14DEP 12
13
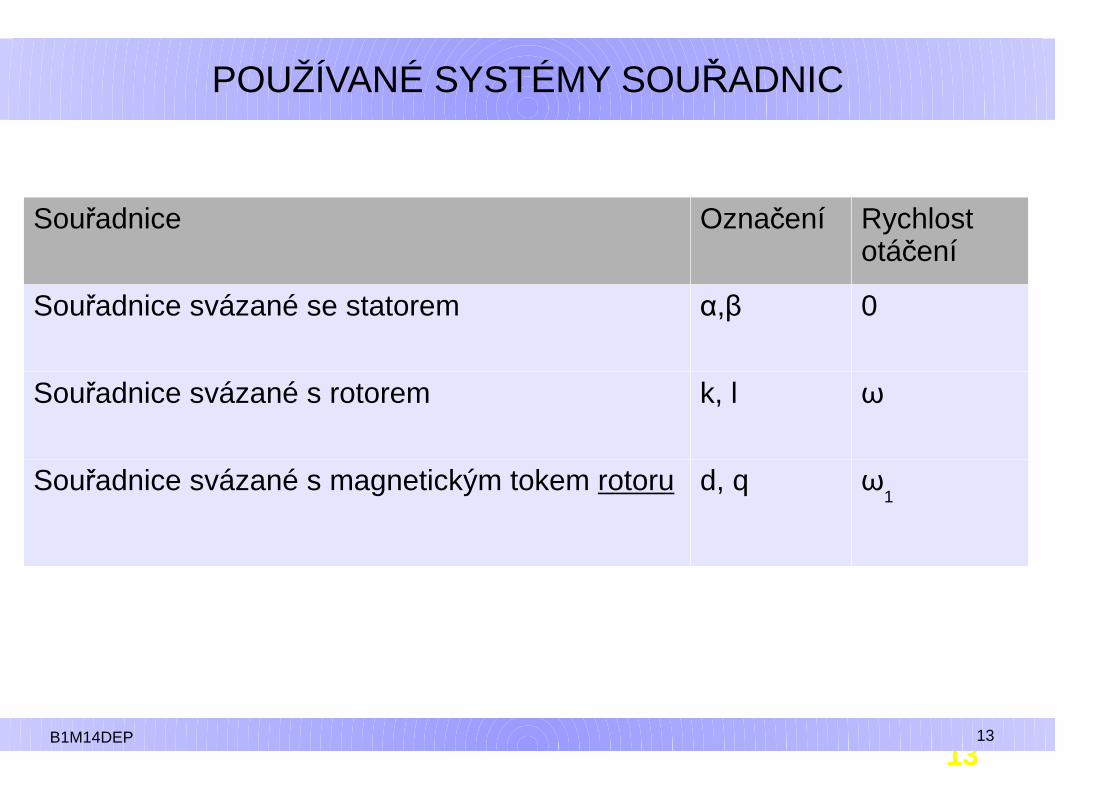
POUŽÍVANÉ SYSTÉMY SOUŘADNIC
13
Souřadnice Označení Rychlost otáčení
Souřadnice svázané se statorem α,β 0
Souřadnice svázané s rotorem k, l ω
Souřadnice svázané s magnetickým tokem rotoru d, q ω1
B1M14DEP 13
14
MOMENT ASYNCHRONNÍHO MOTORU
P=32∣U 1∣⋅∣I 1∣⋅cos=
32⋅ℜ U 1⋅
I 1∗Pro K=
23
B1M14DEP 14
15
MOMENT ASYNCHRONNÍHO MOTORU
P=32∣U 1∣⋅∣I 1∣⋅cos=
32⋅ℜ U 1⋅
I 1∗Pro K=
23
U 1=R1⋅I 1
d 1
dt=R1⋅
I 1 j1 1
Napěťová rovnice statorového vinutí asynchronního motoruzapsaná pomocí prostorových vektorů:
B1M14DEP 15
16
MOMENT ASYNCHRONNÍHO MOTORU
P=32∣U 1∣⋅∣I 1∣⋅cos=
32⋅ℜ U 1⋅
I 1∗Pro K=
23
P=32⋅[R1i1
2 i12 11 i11 i1]
B1M14DEP 16

17
MOMENT ASYNCHRONNÍHO MOTORU
P=32∣U 1∣⋅∣I 1∣⋅cos=
32⋅ℜ U 1⋅
I 1∗Pro K=
23
P=32⋅[R1i1
2 i12 11 i11 i1]
Ztrátový výkon při průchodu proudu odporem:
P=R∣I∣2=Ri a2ib
2
B1M14DEP 17
18
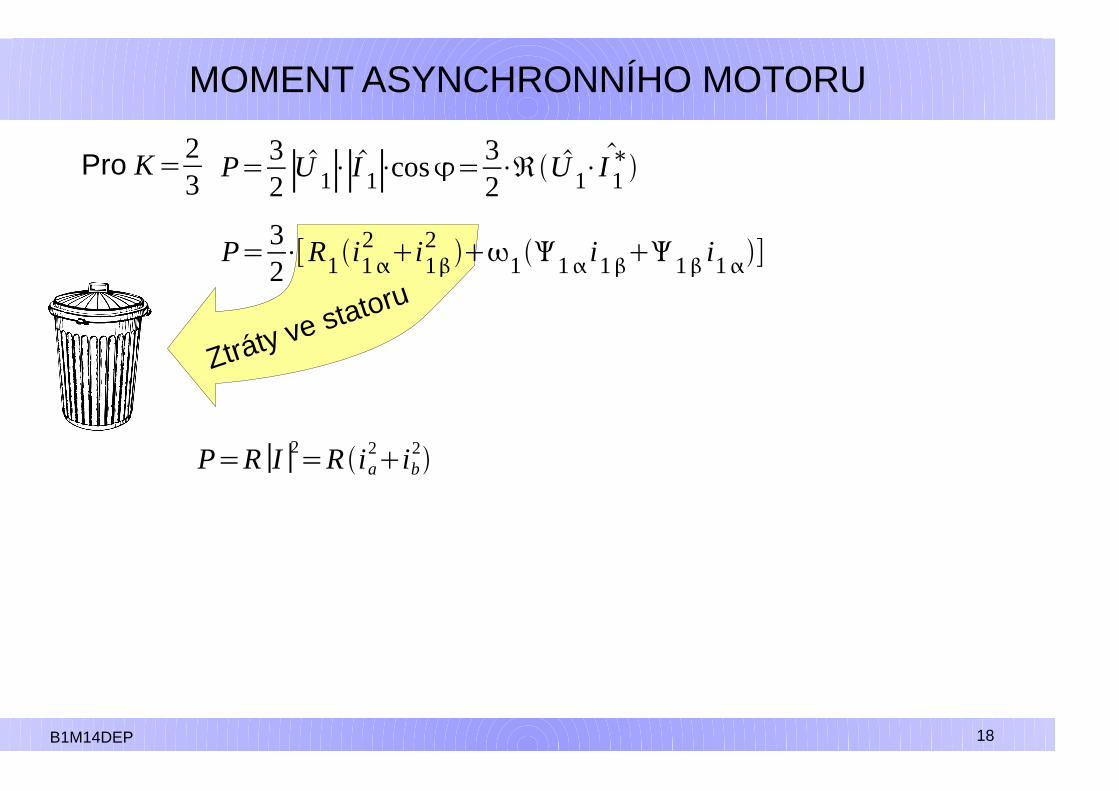
MOMENT ASYNCHRONNÍHO MOTORU
P=32∣U 1∣⋅∣I 1∣⋅cos=
32⋅ℜ U 1⋅
I 1∗Pro K=
23
P=32⋅[R1i1
2 i12 11 i11 i1]
Ztráty ve statoru
P=R∣I∣2=Ri a2ib
2
B1M14DEP 18
19
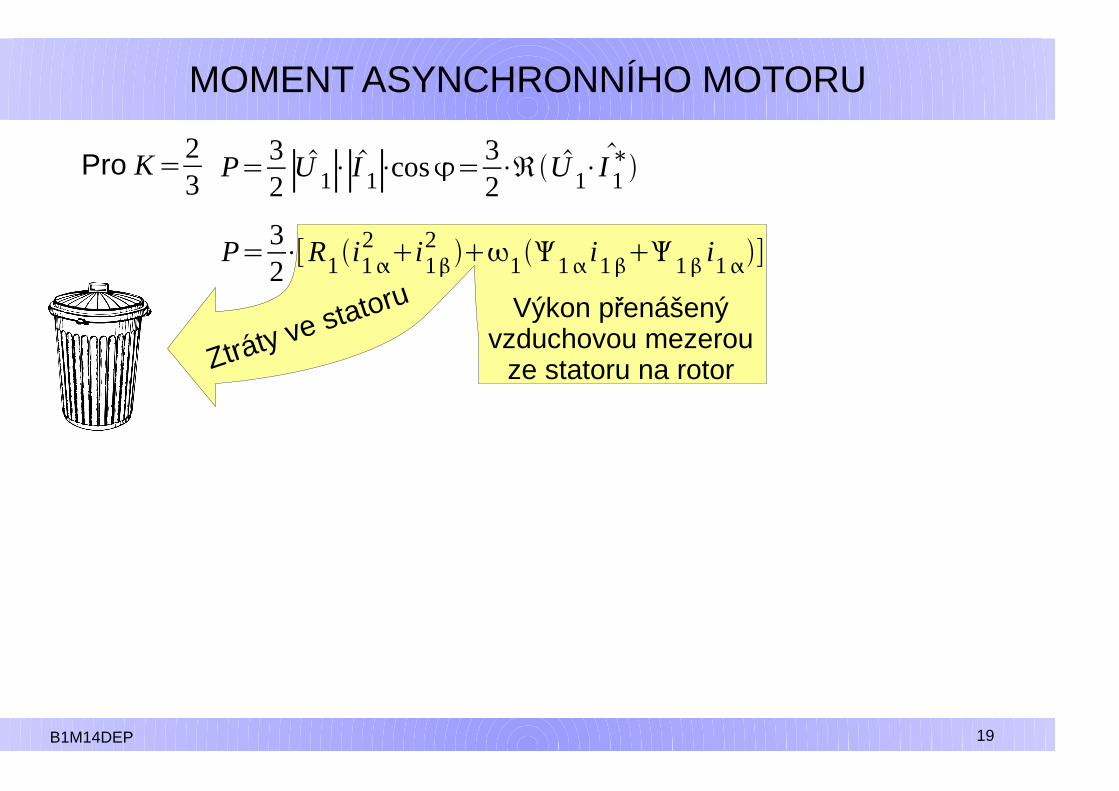
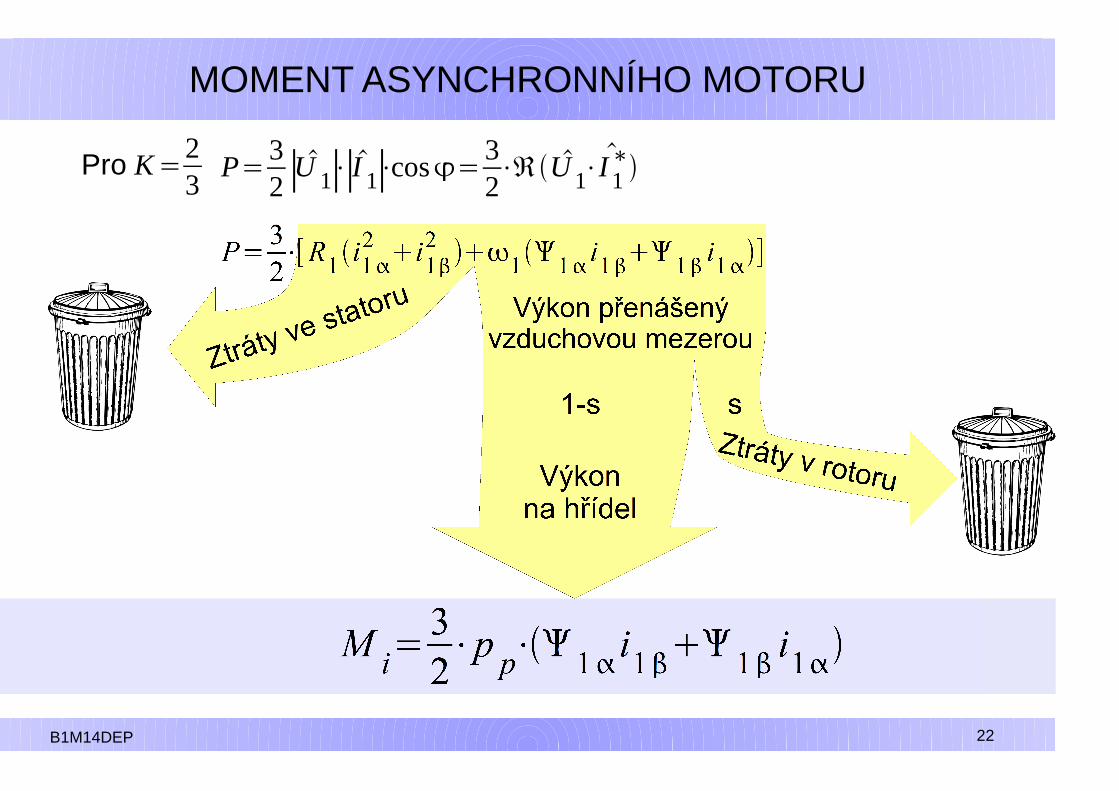
MOMENT ASYNCHRONNÍHO MOTORU
P=32∣U 1∣⋅∣I 1∣⋅cos=
32⋅ℜ U 1⋅
I 1∗Pro K=
23
P=32⋅[R1i1
2 i12 11 i11 i1]
Ztráty ve statoru Výkon přenášenývzduchovou mezerou
ze statoru na rotor
B1M14DEP 19
20
MOMENT ASYNCHRONNÍHO MOTORU
P=32∣U 1∣⋅∣I 1∣⋅cos=
32⋅ℜ U 1⋅
I 1∗Pro K=
23
B1M14DEP 20
21
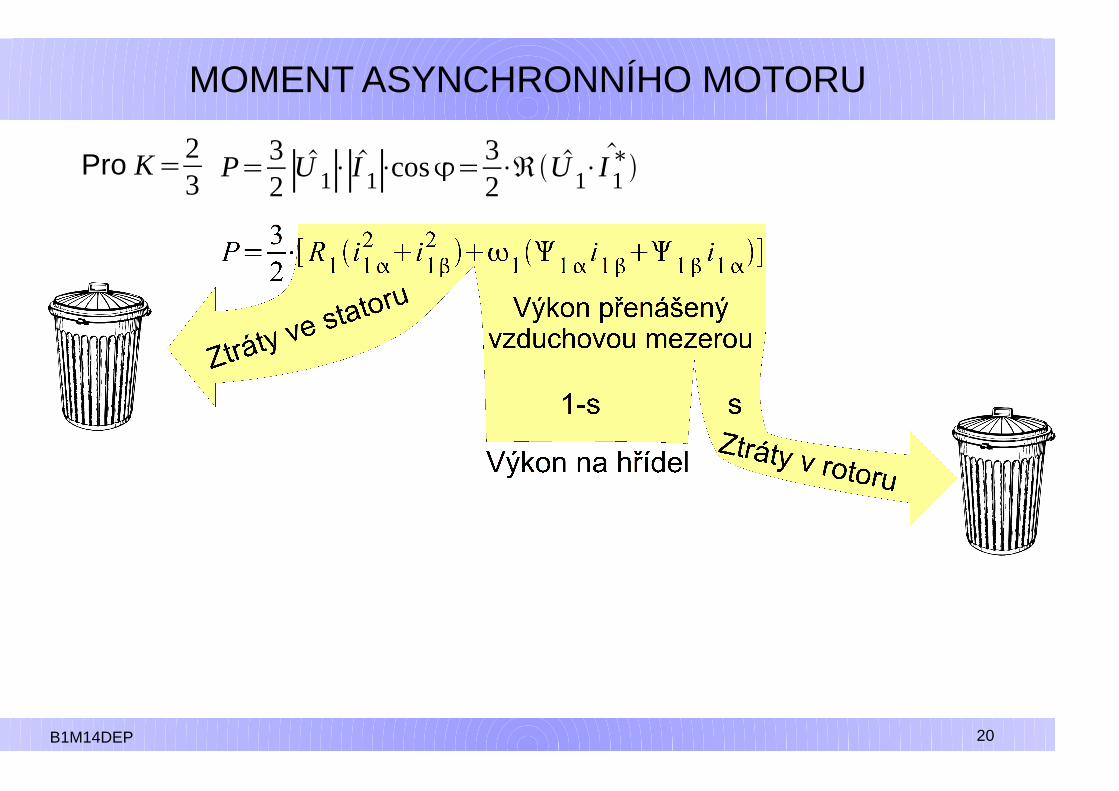
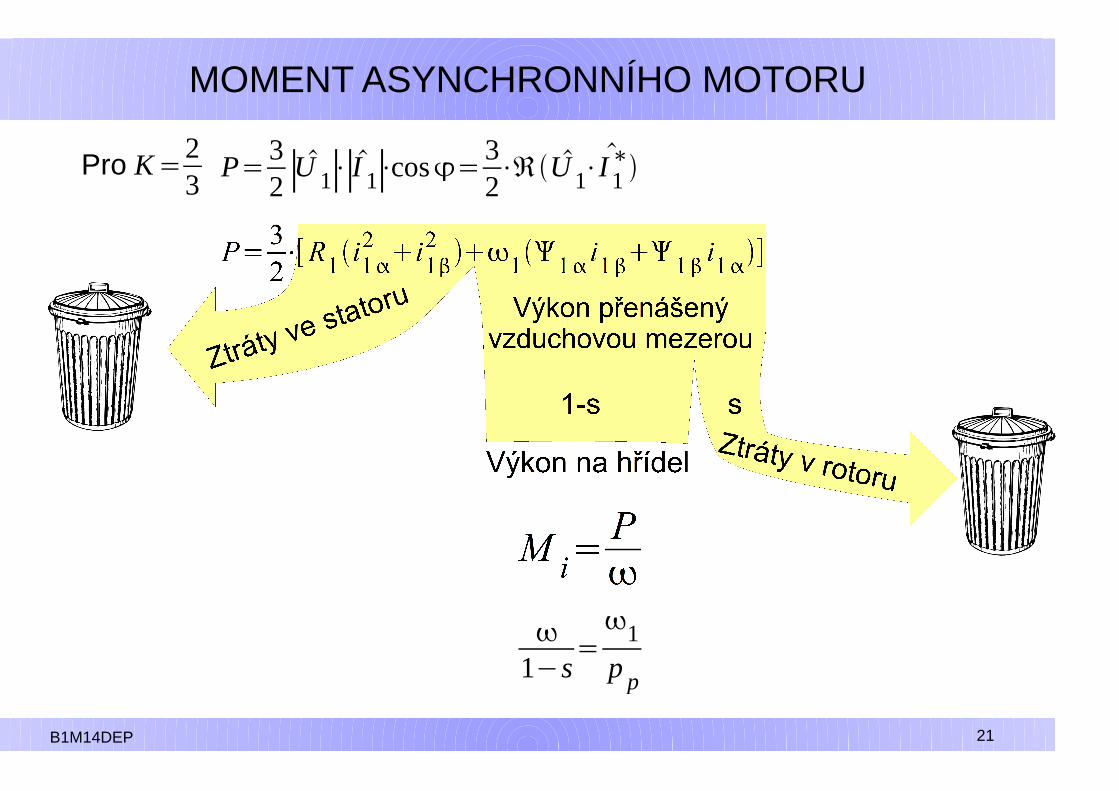
MOMENT ASYNCHRONNÍHO MOTORU
P=32∣U 1∣⋅∣I 1∣⋅cos=
32⋅ℜ U 1⋅
I 1∗Pro K=
23
1 s
=1
pp
B1M14DEP 21
22
MOMENT ASYNCHRONNÍHO MOTORU
P=32∣U 1∣⋅∣I 1∣⋅cos=
32⋅ℜ U 1⋅
I 1∗Pro K=
23
B1M14DEP 22
23
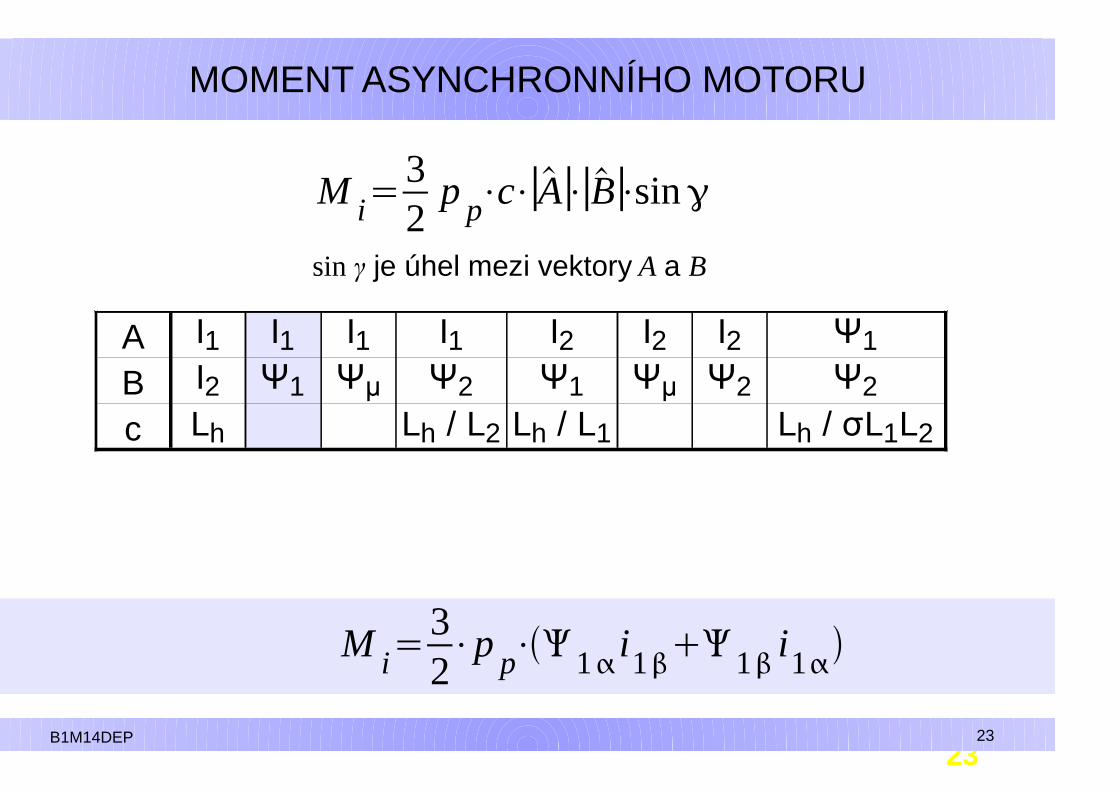
MOMENT ASYNCHRONNÍHO MOTORU
23
ABc
I1 I1 I1 I1 I2 I2 I2 Ψ1I2 Ψ1 Ψµ Ψ2 Ψ1 Ψµ Ψ2 Ψ2
Lh Lh / L2 Lh / L1 Lh / σL1L2
M i=32
pp⋅c⋅∣A∣⋅∣B∣⋅sin
sin γ je úhel mezi vektory A a B
M i=32⋅pp⋅ 1 i1 1 i1
B1M14DEP 23
24
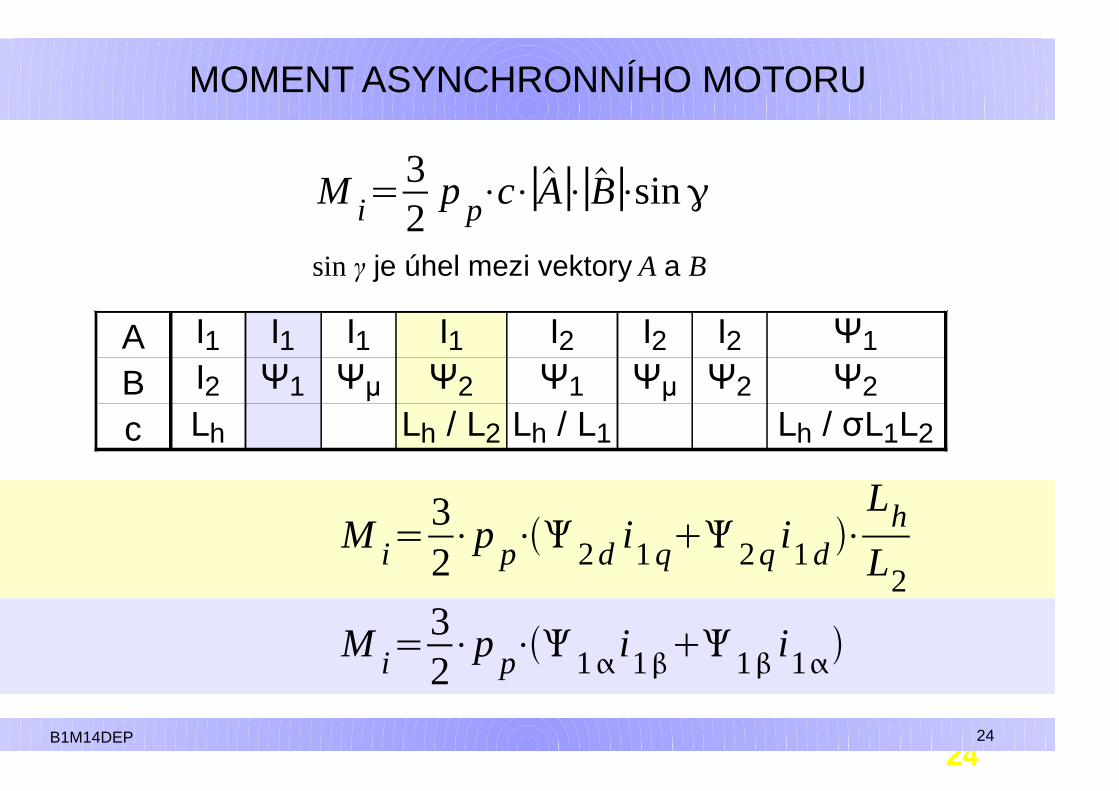
MOMENT ASYNCHRONNÍHO MOTORU
24
ABc
I1 I1 I1 I1 I2 I2 I2 Ψ1I2 Ψ1 Ψµ Ψ2 Ψ1 Ψµ Ψ2 Ψ2
Lh Lh / L2 Lh / L1 Lh / σL1L2
M i=32
pp⋅c⋅∣A∣⋅∣B∣⋅sin
sin γ je úhel mezi vektory A a B
M i=32⋅pp⋅ 1 i1 1 i1
M i=32⋅pp⋅ 2d i1q 2q i1d ⋅
Lh
L2
B1M14DEP 24
25
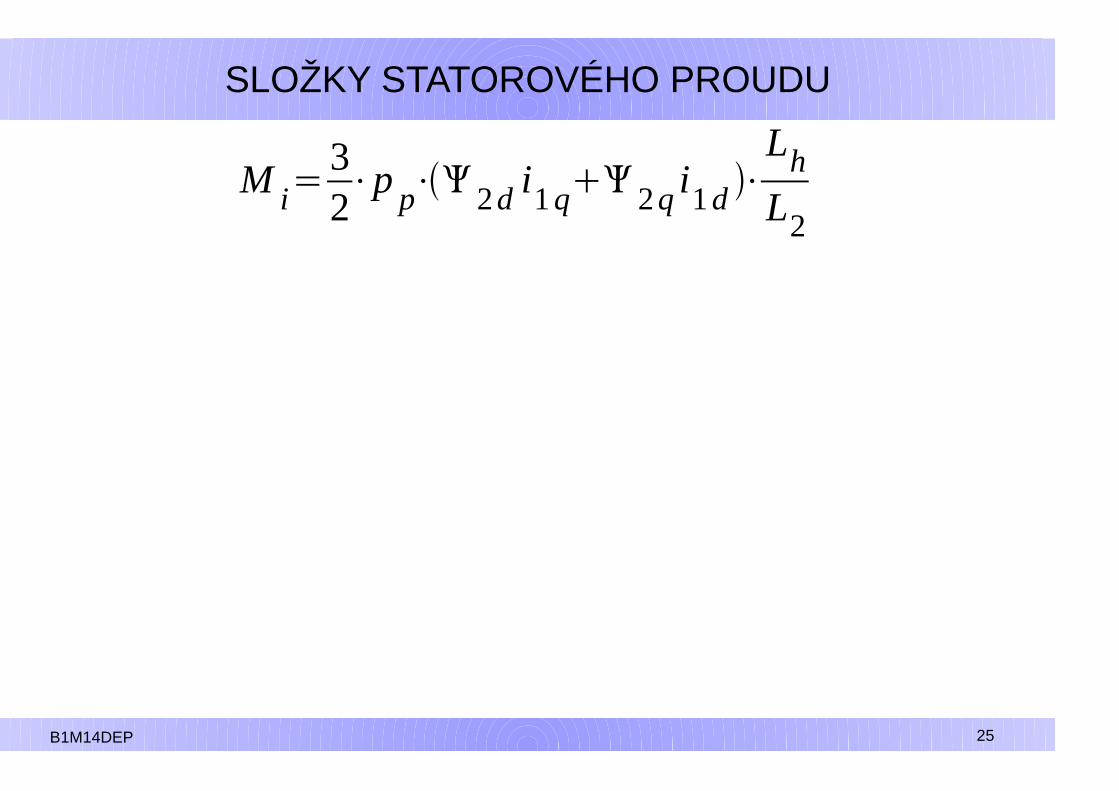
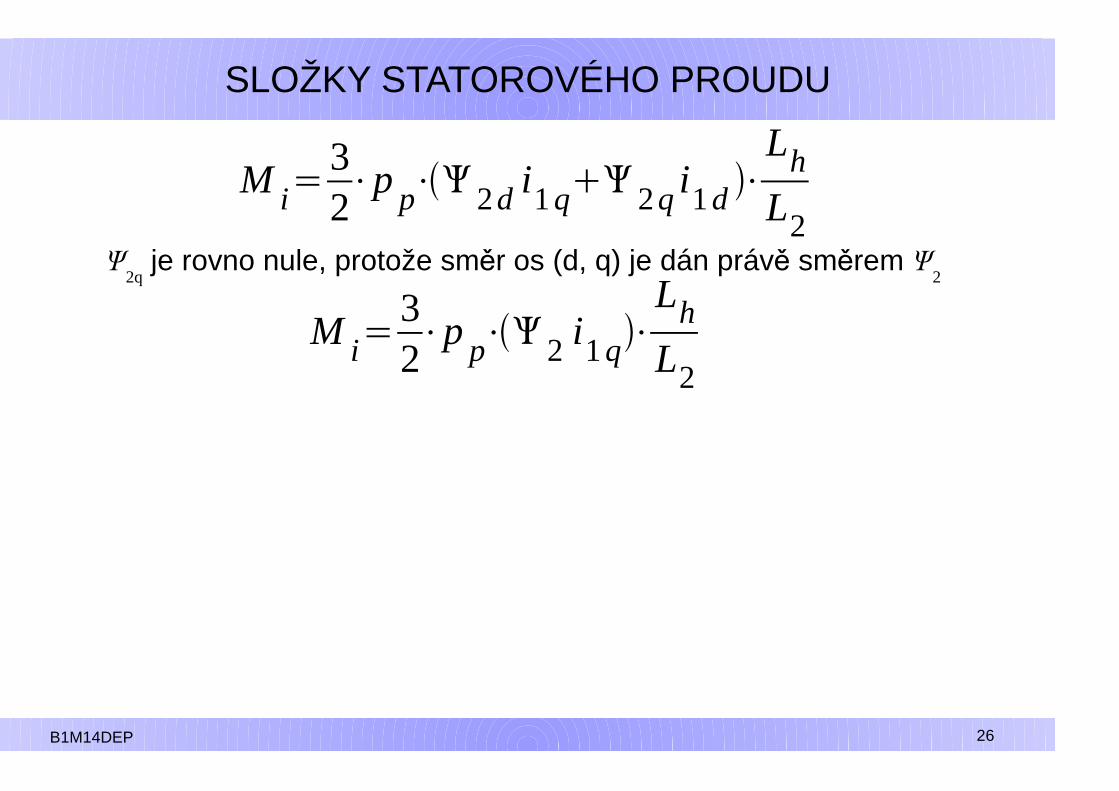
SLOŽKY STATOROVÉHO PROUDU
M i=32⋅pp⋅ 2d i1q 2q i1d ⋅
Lh
L2
B1M14DEP 25
26
SLOŽKY STATOROVÉHO PROUDU
M i=32⋅pp⋅ 2d i1q 2q i1d ⋅
Lh
L2Ψ
2q je rovno nule, protože směr os (d, q) je dán právě směrem Ψ
2
M i=32⋅pp⋅ 2 i1q⋅
Lh
L2
B1M14DEP 26
27
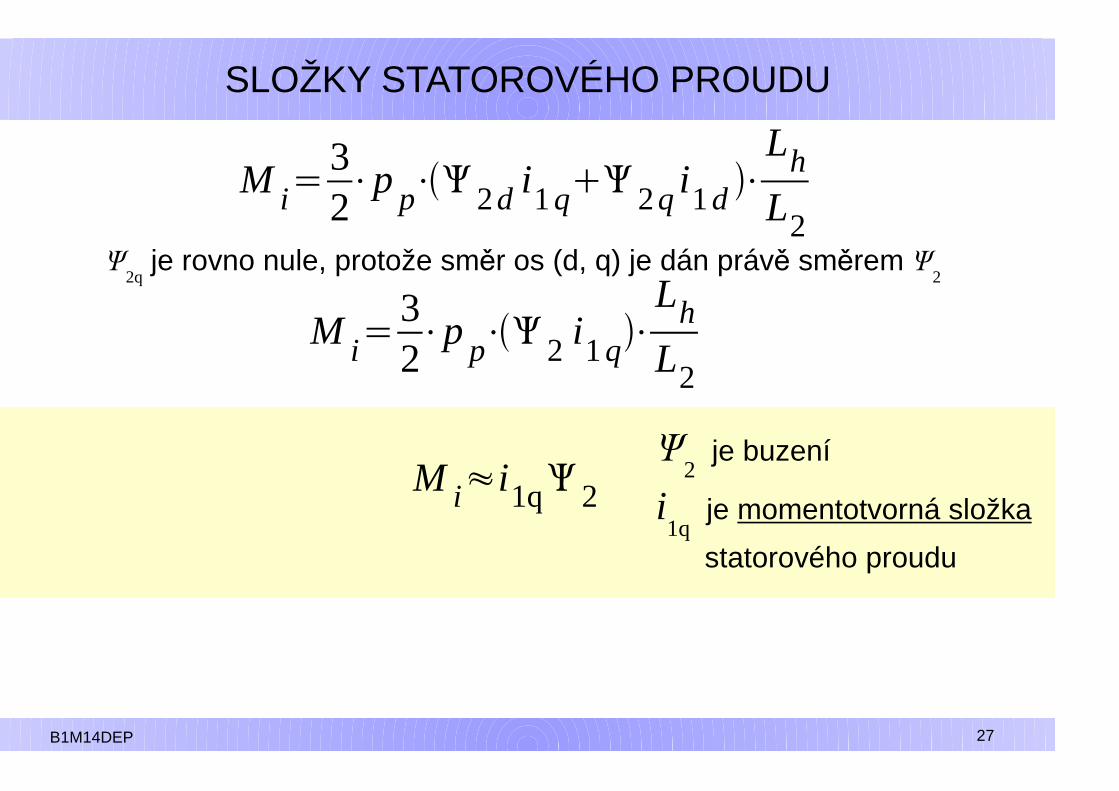
SLOŽKY STATOROVÉHO PROUDU
M i=32⋅pp⋅ 2d i1q 2q i1d ⋅
Lh
L2Ψ
2q je rovno nule, protože směr os (d, q) je dán právě směrem Ψ
2
M i=32⋅pp⋅ 2 i1q⋅
Lh
L2
M i≈i1q 2 i1q
je momentotvorná složka
statorového proudu
Ψ2 je buzení
B1M14DEP 27
28
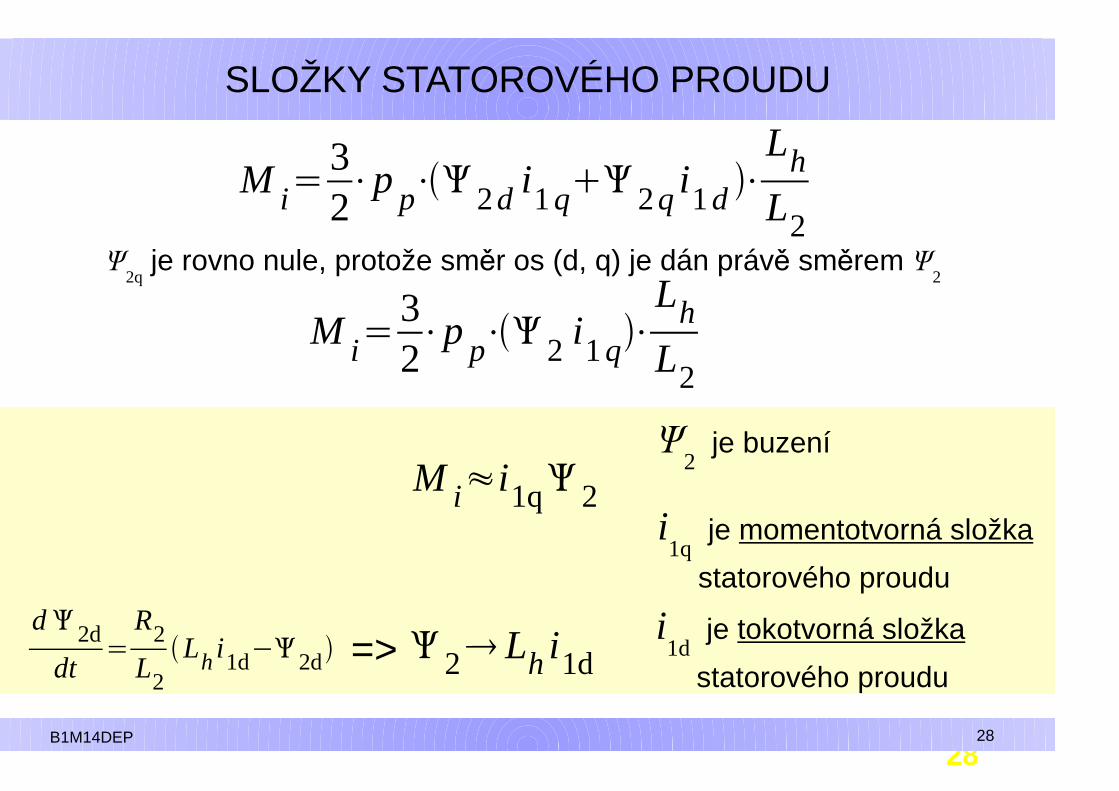
SLOŽKY STATOROVÉHO PROUDU
28
M i=32⋅pp⋅ 2d i1q 2q i1d ⋅
Lh
L2Ψ
2q je rovno nule, protože směr os (d, q) je dán právě směrem Ψ
2
M i=32⋅pp⋅ 2 i1q⋅
Lh
L2
M i≈i1q 2i1q
je momentotvorná složka
statorového proudu
Ψ2 je buzení
d 2d
dt=
R2
L2Lh i1d 2d => 2 Lh i1d
i1d
je tokotvorná složka
statorového proudu
B1M14DEP 28
29
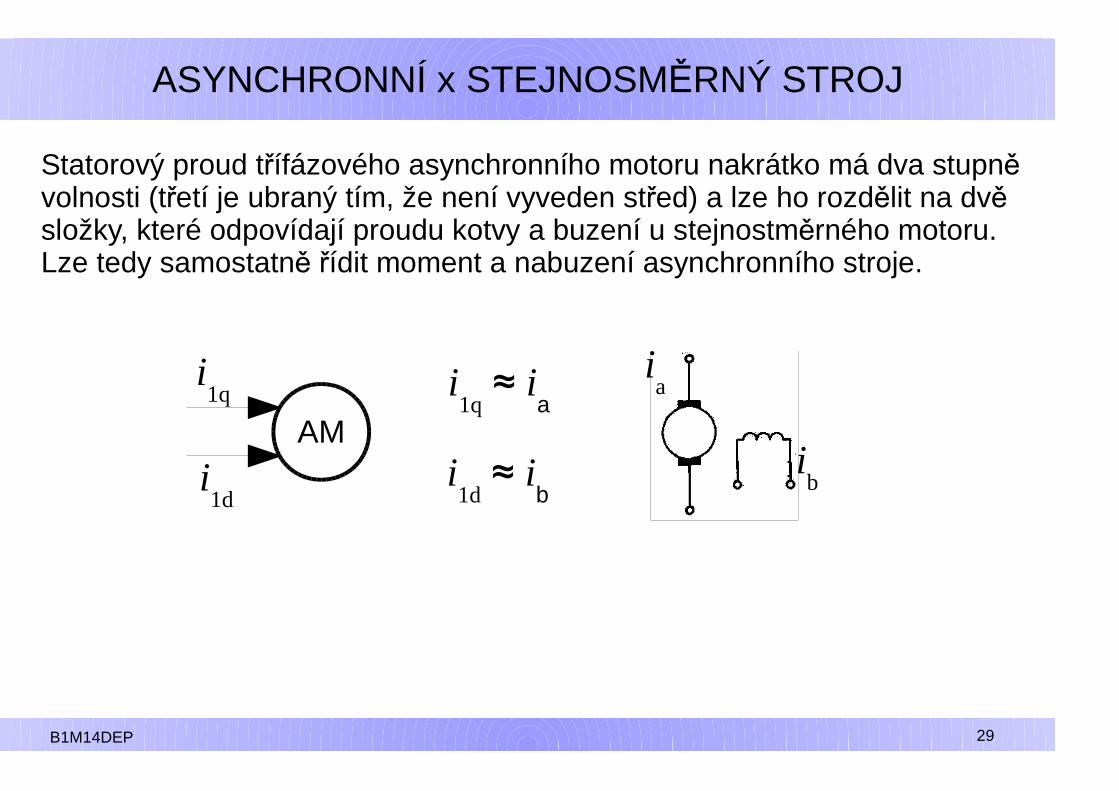
ASYNCHRONNÍ x STEJNOSMĚRNÝ STROJ
AM
i1q
i1d
ia
ib
i1q
≈ ia
i1d
≈ ib
Statorový proud třífázového asynchronního motoru nakrátko má dva stupněvolnosti (třetí je ubraný tím, že není vyveden střed) a lze ho rozdělit na dvěsložky, které odpovídají proudu kotvy a buzení u stejnostměrného motoru.Lze tedy samostatně řídit moment a nabuzení asynchronního stroje.
B1M14DEP 29
30
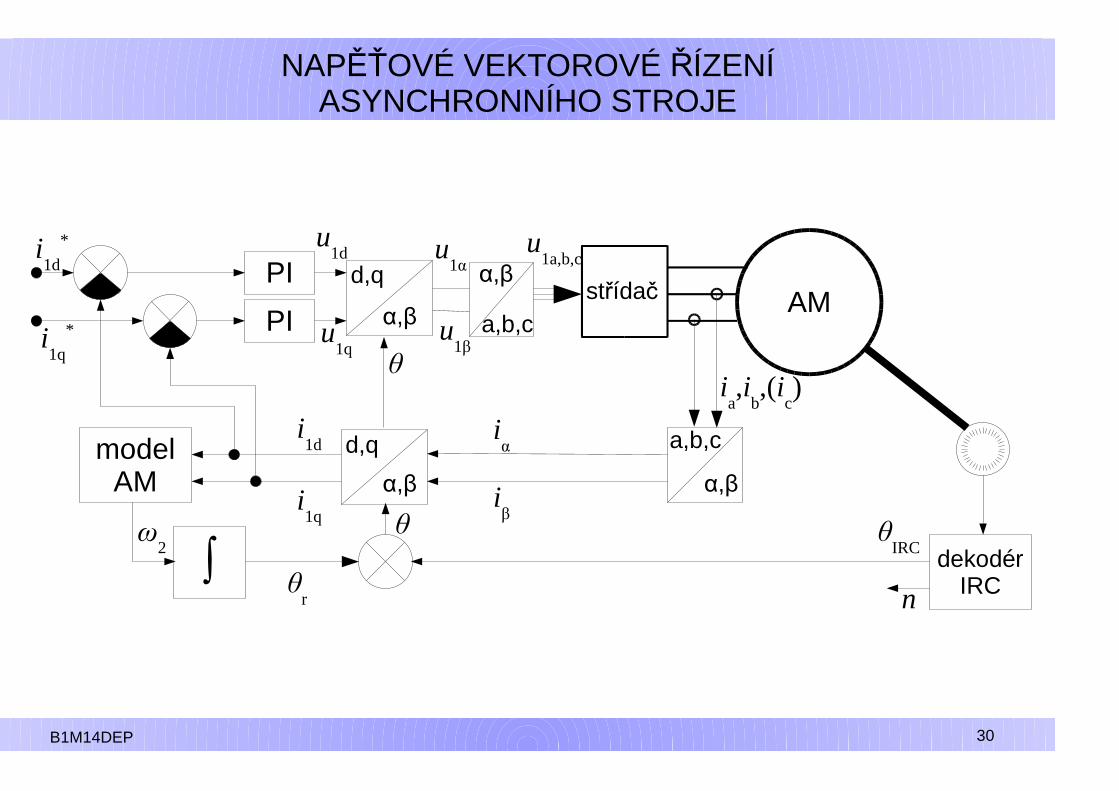
NAPĚŤOVÉ VEKTOROVÉ ŘÍZENÍASYNCHRONNÍHO STROJE
AMstřídačPI
PI
dekodérIRCn
θIRC
α,β
a,b,c
α,β
d,qmodelAM
θr
α,β
d,q
θ
i1d
*
i1q
*
α,β
a,b,c
i1d
i1q
ia,i
b,(i
c)
iα
iβ
θ
u1d
u1q
u1α
u1β
u1a,b,c
∫ω
2
B1M14DEP 30
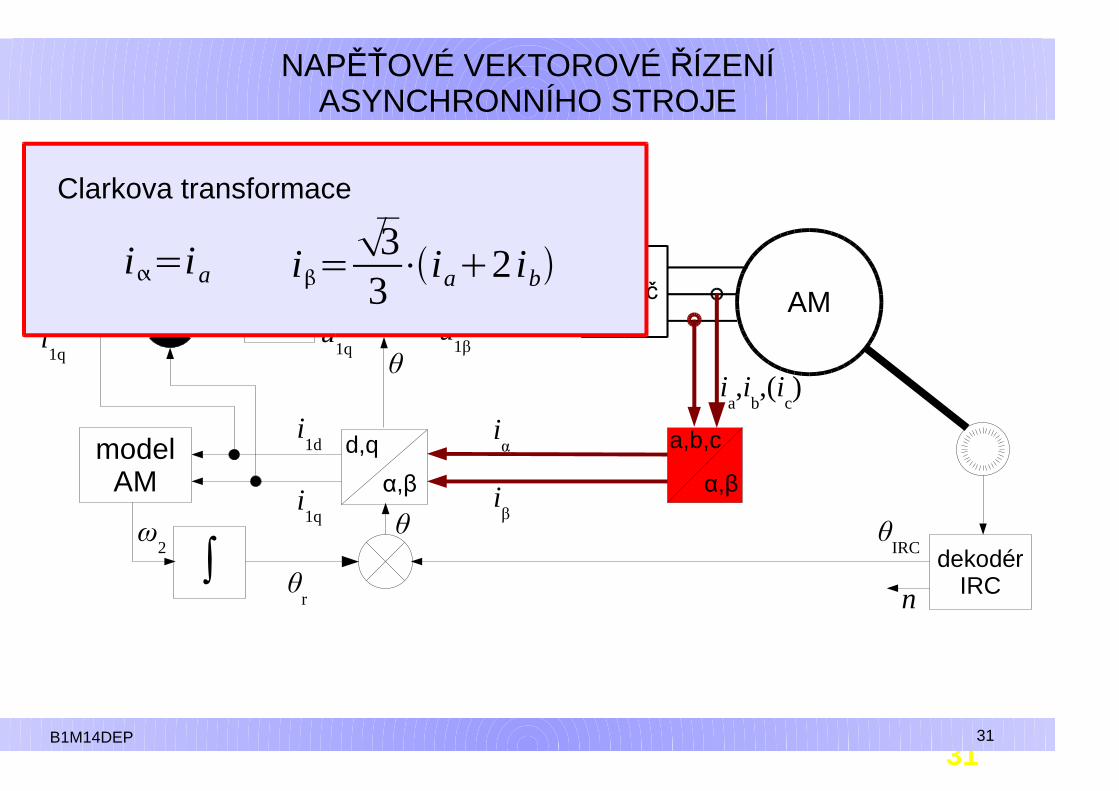
31
NAPĚŤOVÉ VEKTOROVÉ ŘÍZENÍASYNCHRONNÍHO STROJE
31
AMstřídačPI
PI
dekodérIRCn
θIRC
α,β
a,b,c
α,β
d,qmodelAM
θr
α,β
d,q
θ
i1d
*
i1q
*
α,β
a,b,c
i1d
i1q
ia,i
b,(i
c)
iα
iβ
θ
u1d
u1q
u1α
u1β
u1a,b,c
∫ω
2
Clarkova transformace
i=i a i =33⋅i a2 i b
B1M14DEP 31
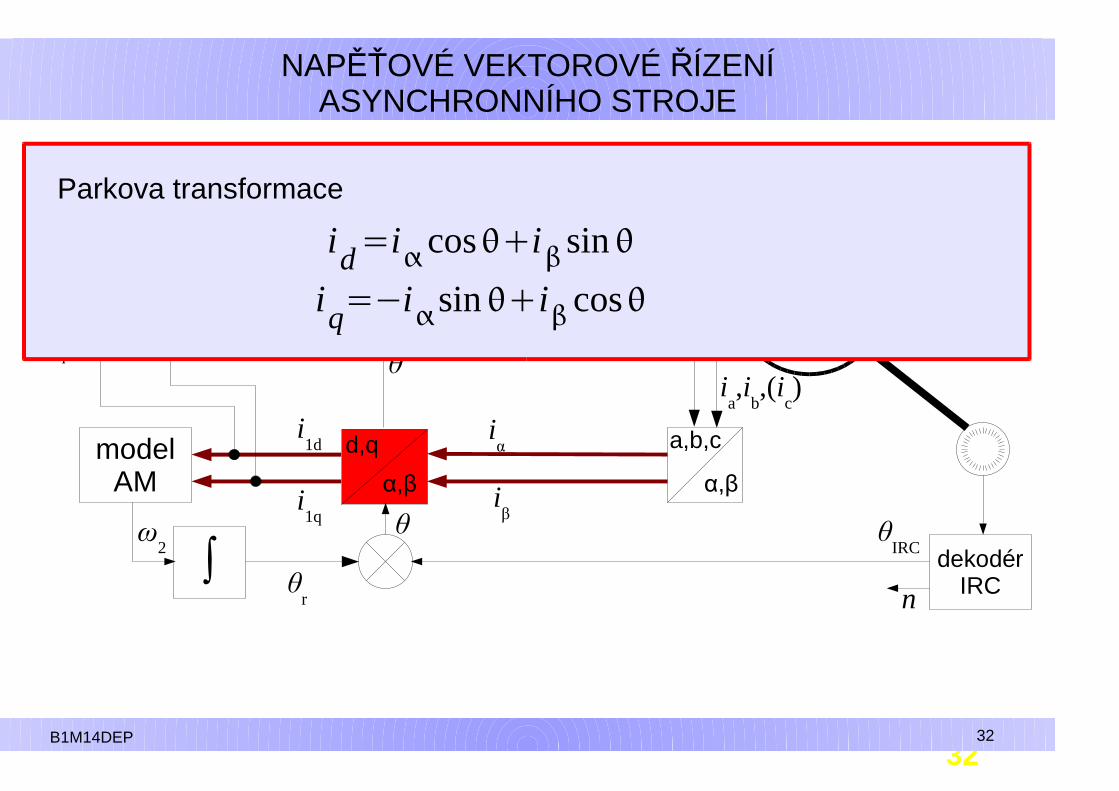
32
NAPĚŤOVÉ VEKTOROVÉ ŘÍZENÍASYNCHRONNÍHO STROJE
32
AMstřídačPI
PI
dekodérIRCn
θIRC
α,β
a,b,c
α,β
d,qmodelAM
θr
α,β
d,q
θ
i1d
*
i1q
*
α,β
a,b,c
i1d
i1q
ia,i
b,(i
c)
iα
iβ
θ
u1d
u1q
u1α
u1β
u1a,b,c
∫ω
2
Parkova transformace
id=i cosi sin
iq= isini cos
B1M14DEP 32
33
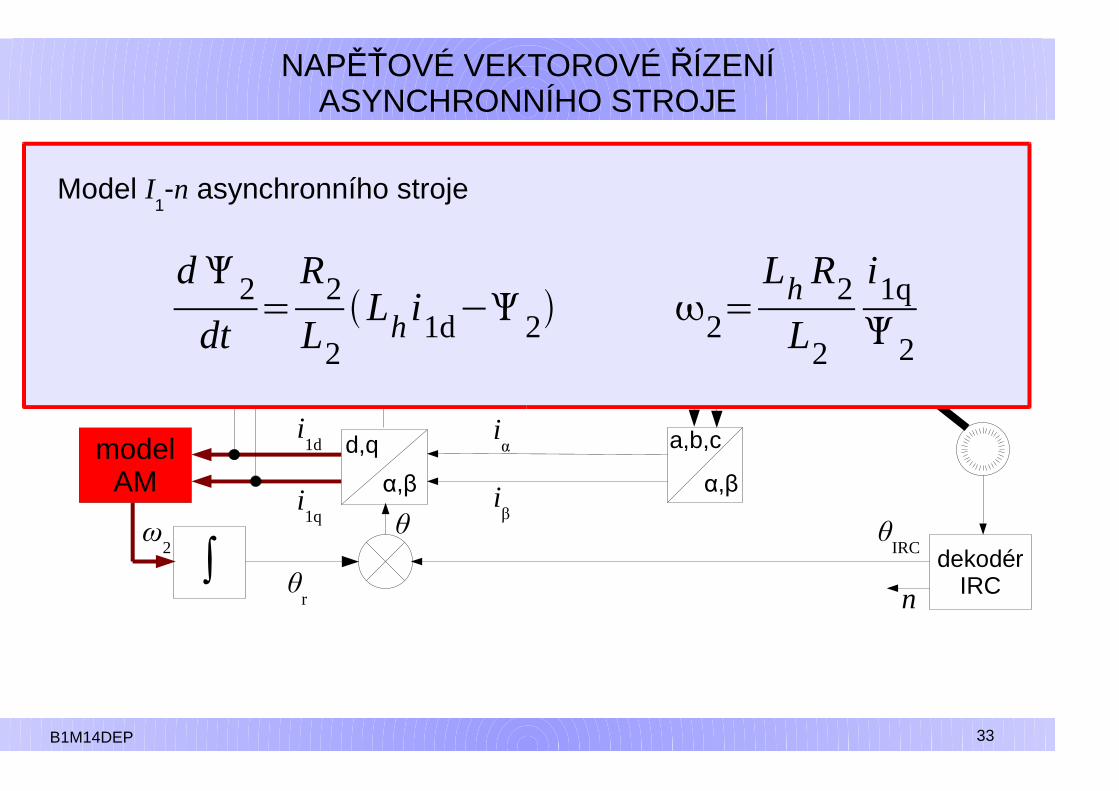
NAPĚŤOVÉ VEKTOROVÉ ŘÍZENÍASYNCHRONNÍHO STROJE
AMstřídačPI
PI
dekodérIRCn
θIRC
α,β
a,b,c
α,β
d,qmodelAM
θr
α,β
d,q
θ
i1d
*
i1q
*
α,β
a,b,c
i1d
i1q
ia,i
b,(i
c)
iα
iβ
θ
u1d
u1q
u1α
u1β
u1a,b,c
∫ω
2
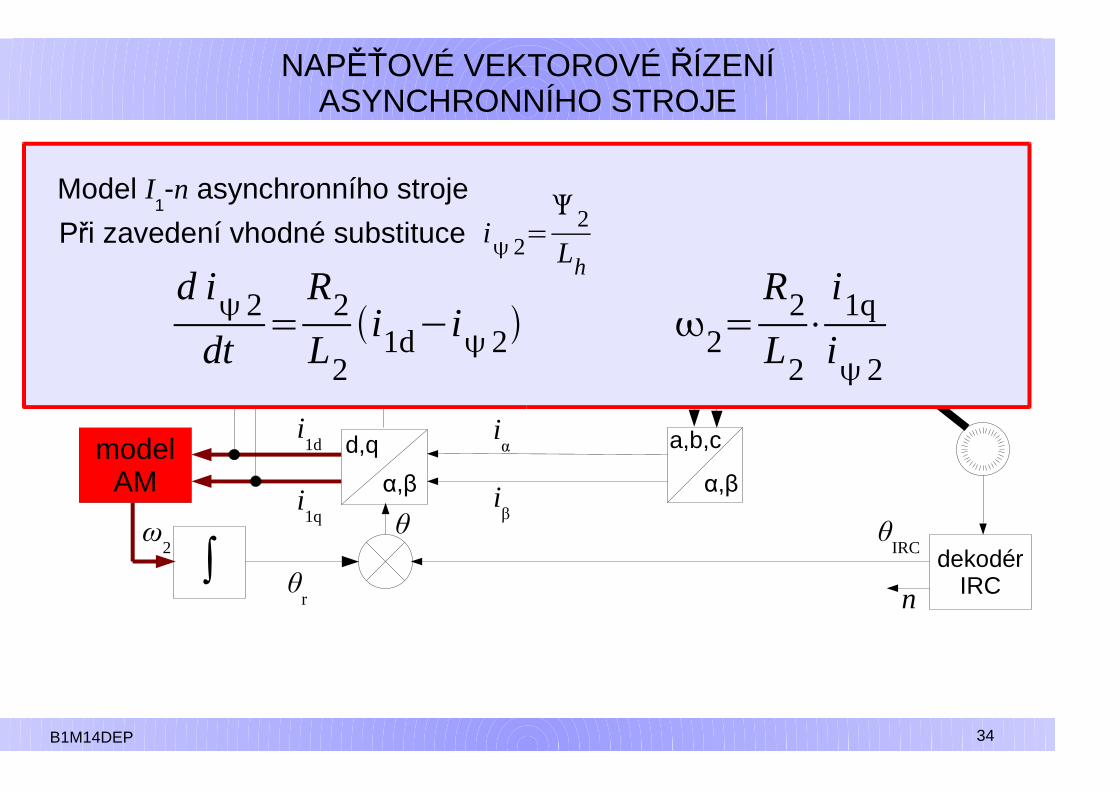
Model I1-n asynchronního stroje
d 2
dt=
R2
L2Lhi1d 2 2=
Lh R2
L2
i1q
2
B1M14DEP 33
34
NAPĚŤOVÉ VEKTOROVÉ ŘÍZENÍASYNCHRONNÍHO STROJE
AMstřídačPI
PI
dekodérIRCn
θIRC
α,β
a,b,c
α,β
d,qmodelAM
θr
α,β
d,q
θ
i1d
*
i1q
*
α,β
a,b,c
i1d
i1q
ia,i
b,(i
c)
iα
iβ
θ
u1d
u1q
u1α
u1β
u1a,b,c
∫ω
2
Model I1-n asynchronního stroje
Při zavedení vhodné substituce i 2= 2
Lhd i 2
dt=
R2
L2i1d i 2 2=
R2
L2⋅
i1q
i 2
B1M14DEP 34
35
NAPĚŤOVÉ VEKTOROVÉ ŘÍZENÍASYNCHRONNÍHO STROJE
35
AMstřídačPI
PI
dekodérIRCn
θIRC
α,β
a,b,c
α,β
d,qmodelAM
θr
α,β
d,q
θ
i1d
*
i1q
*
α,β
a,b,c
i1d
i1q
ia,i
b,(i
c)
iα
iβ
θ
u1d
u1q
u1α
u1β
u1a,b,c
α,β
∫ω
2
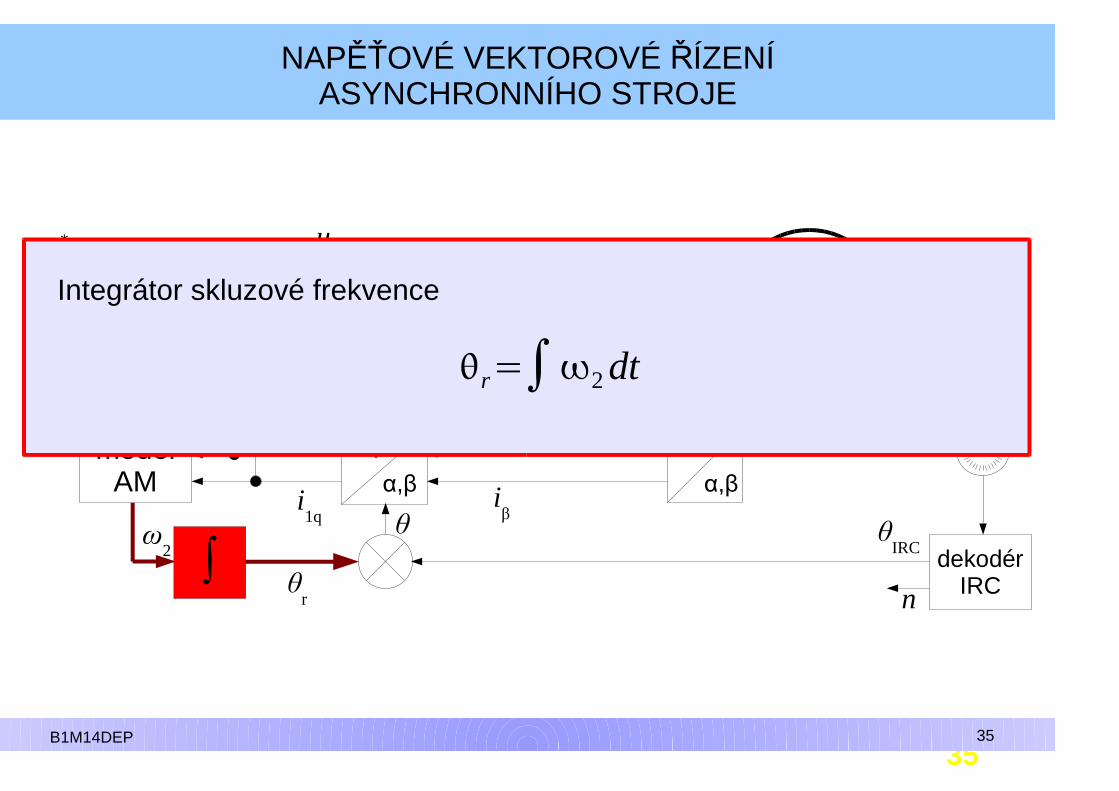
Integrátor skluzové frekvence
r=∫2 dt
B1M14DEP 35
36
NAPĚŤOVÉ VEKTOROVÉ ŘÍZENÍASYNCHRONNÍHO STROJE
36
AMstřídačPI
PI
dekodérIRCn
θIRC
α,β
a,b,c
α,β
d,qmodelAM
θr
α,β
d,q
θ
i1d
*
i1q
*
α,β
a,b,c
i1d
i1q
ia,i
b,(i
c)
iα
iβ
θ
u1d
u1q
u1α
u1β
u1a,b,c
α,β
∫ω
2
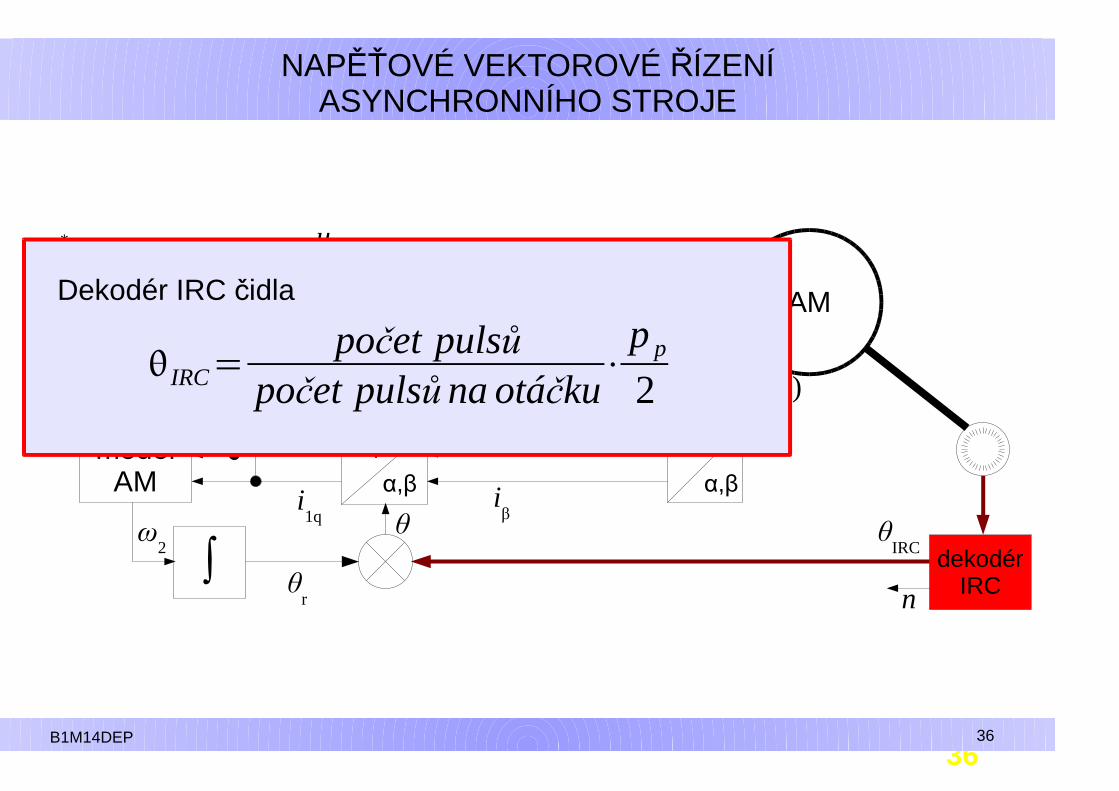
Dekodér IRC čidla
IRC=počet pulsů
počet pulsůna otáčku⋅
pp
2
B1M14DEP 36
37
NAPĚŤOVÉ VEKTOROVÉ ŘÍZENÍASYNCHRONNÍHO STROJE
37
AMstřídačPI
PI
dekodérIRCn
θIRC
α,β
a,b,c
α,β
d,qmodelAM
θr
α,β
d,q
θ
i1d
*
i1q
*
α,β
a,b,c
i1d
i1q
ia,i
b,(i
c)
iα
iβ
θ
u1d
u1q
u1α
u1β
u1a,b,c
α,β
∫ω
2
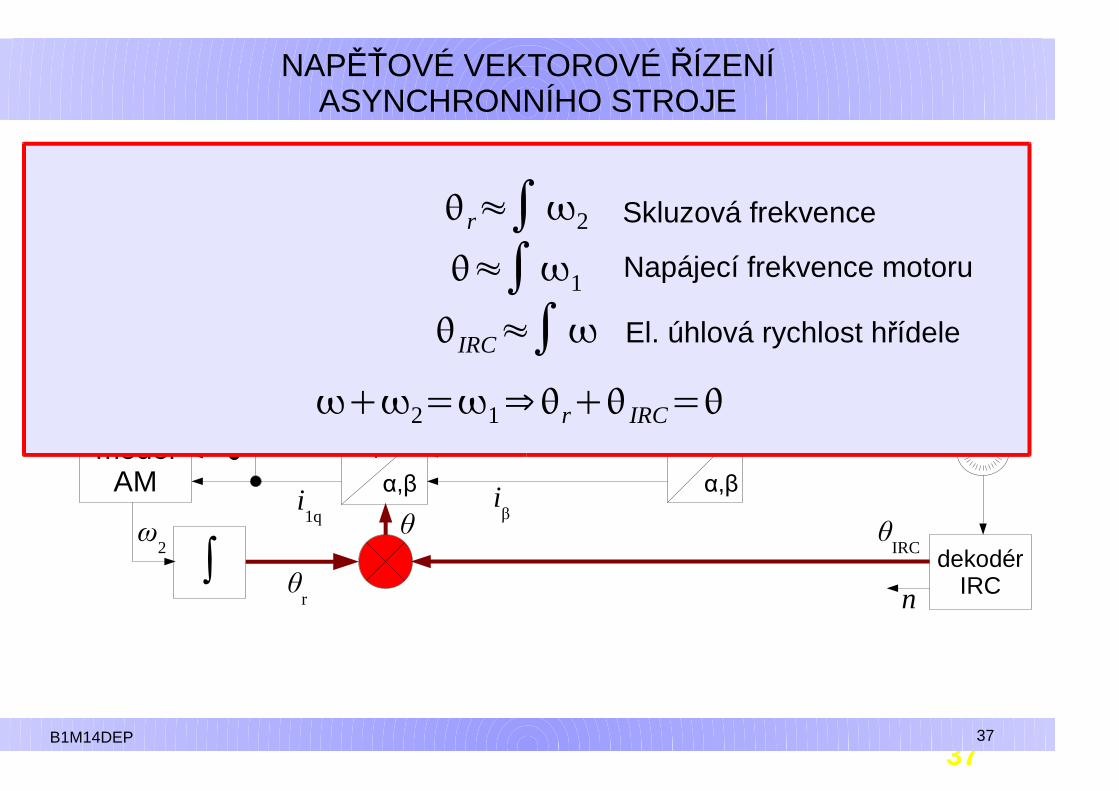
r≈∫2
≈∫1
IRC≈∫
Skluzová frekvence
Napájecí frekvence motoru
El. úhlová rychlost hřídele
2=1⇒r IRC=
B1M14DEP 37
38
NAPĚŤOVÉ VEKTOROVÉ ŘÍZENÍASYNCHRONNÍHO STROJE
38
AMstřídačPI
PI
dekodérIRCn
θIRC
α,βa,b,c
α,β
d,qmodelAM
θr
α,β
d,q
θ
i1d
*
i1q
*
α,β
a,b,c
i1d
i1q
ia,i
b,(i
c)
iα
iβ
θ
u1d
u1q
u1α
u1β
u1a,b,c
∫ω
2
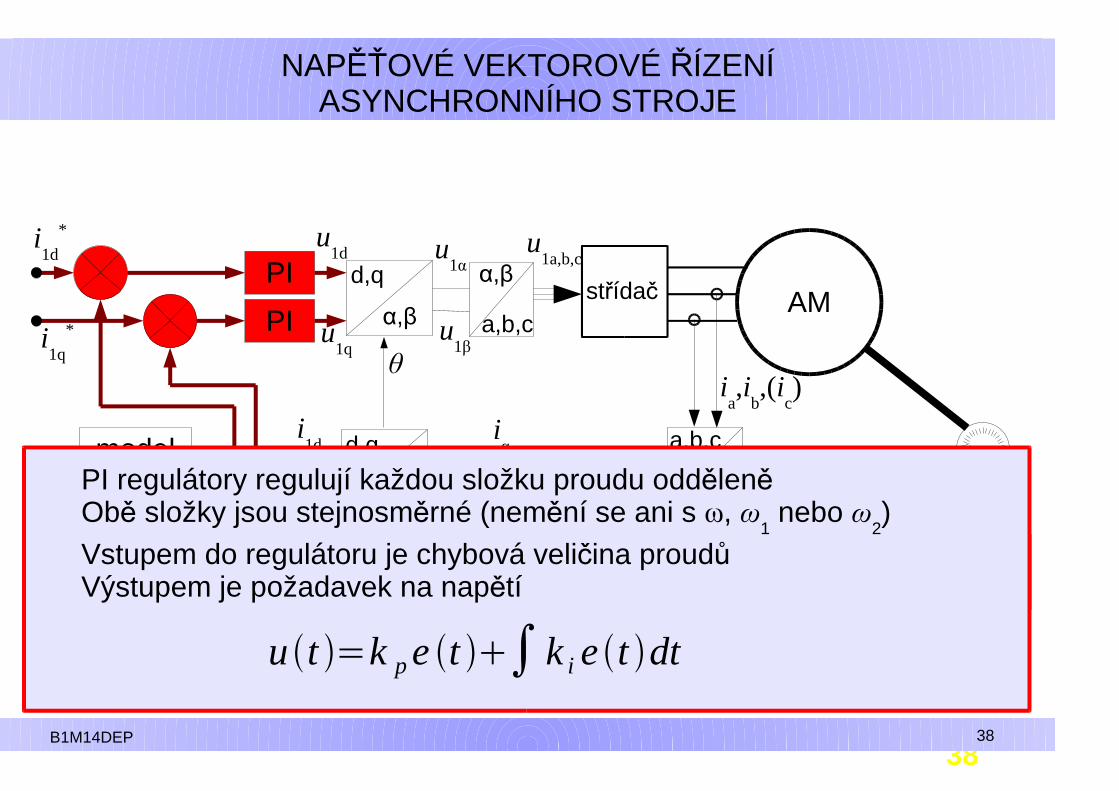
PI regulátory regulují každou složku proudu odděleněObě složky jsou stejnosměrné (nemění se ani s ω, ω
1 nebo ω
2)
Vstupem do regulátoru je chybová veličina proudůVýstupem je požadavek na napětí
ut =k pet ∫k i et dt
B1M14DEP 38
39
NAPĚŤOVÉ VEKTOROVÉ ŘÍZENÍASYNCHRONNÍHO STROJE
AMstřídačPI
PI
dekodérIRCn
θIRC
α,β
a,b,c
α,β
d,qmodelAM
θr
α,β
d,q
θ
i1d
*
i1q
*
α,β
a,b,c
i1d
i1q
ia,i
b,(i
c)
iα
iβ
θ
u1d
u1q
u1α
u1β
u1a,b,c
α,β
∫ω
2
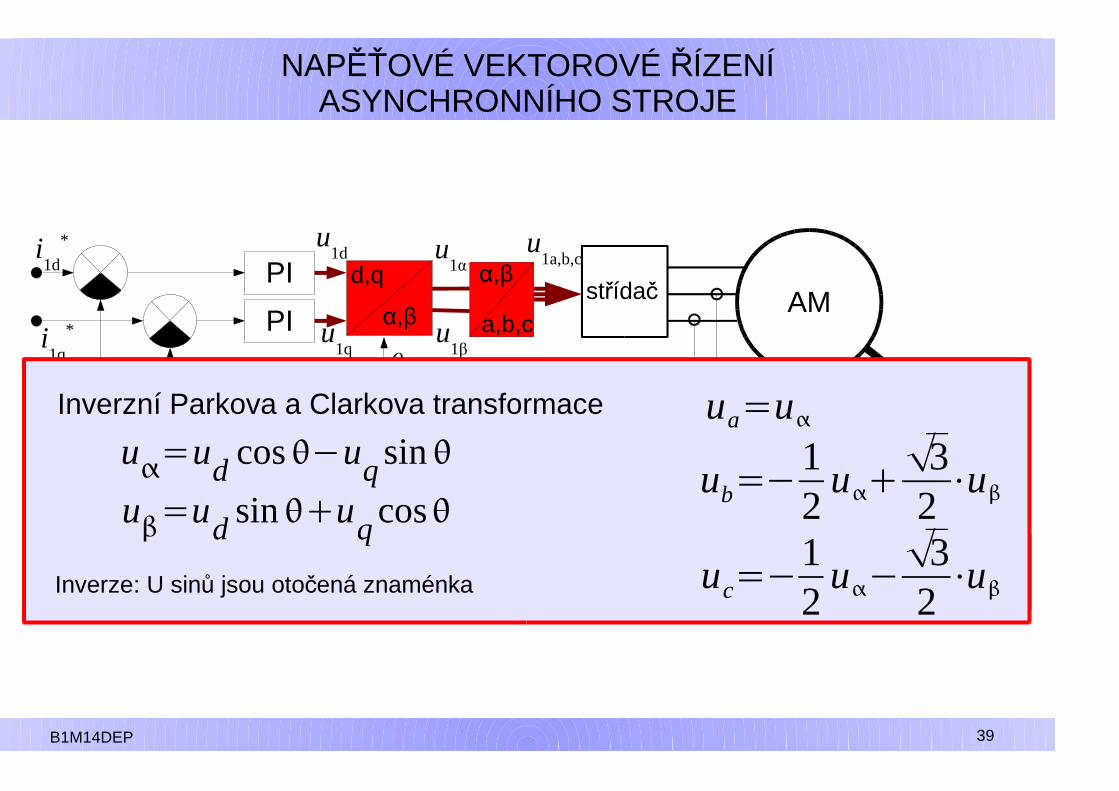
Inverzní Parkova a Clarkova transformace
u=ud cos uqsin
u=ud sinuqcos
Inverze: U sinů jsou otočená znaménka
ua=u
ub= 12
u32⋅u
uc= 12
u 32⋅u
B1M14DEP 39
40
NAPĚŤOVÉ VEKTOROVÉ ŘÍZENÍASYNCHRONNÍHO STROJE
B1M14DEP 40
41
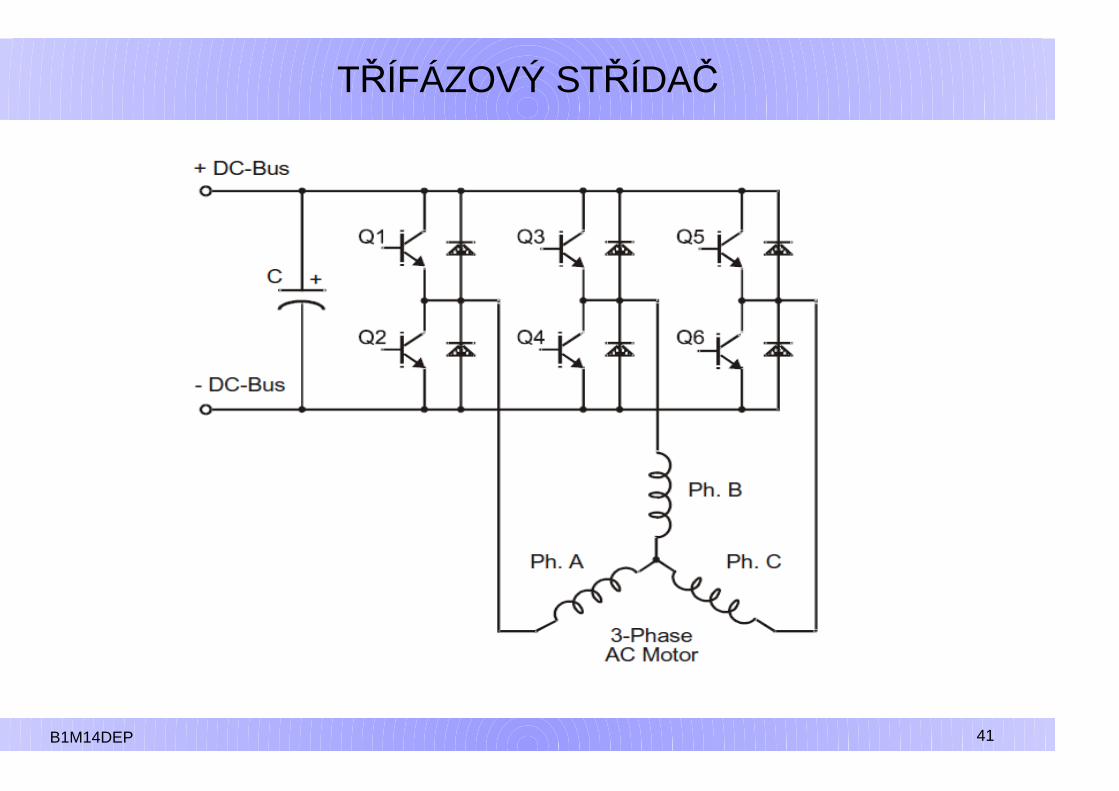
TŘÍFÁZOVÝ STŘÍDAČ
B1M14DEP 41
42
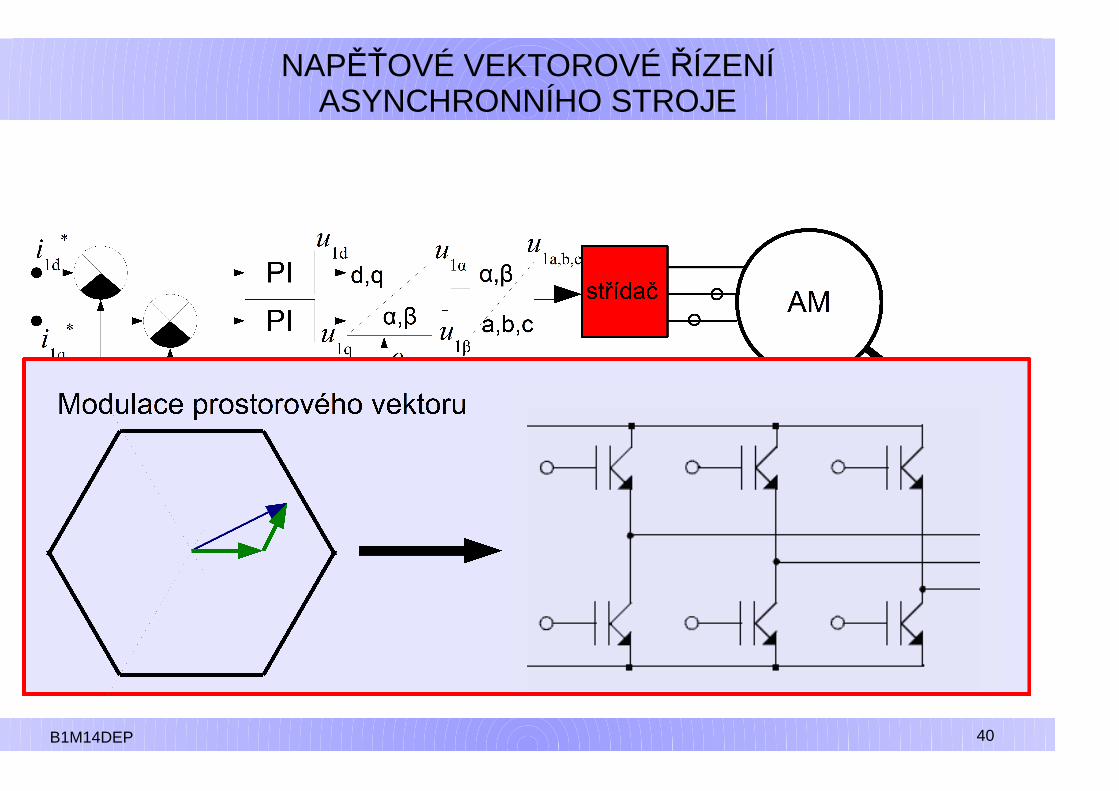
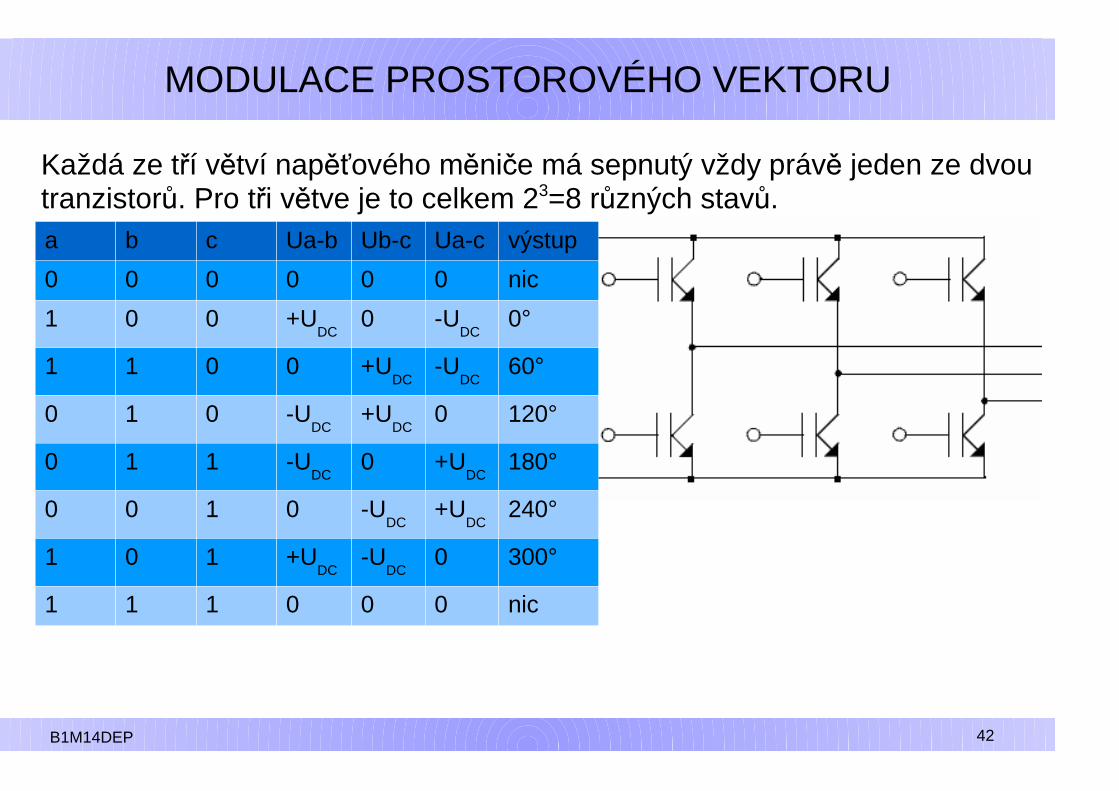
MODULACE PROSTOROVÉHO VEKTORU
Každá ze tří větví napěťového měniče má sepnutý vždy právě jeden ze dvoutranzistorů. Pro tři větve je to celkem 23=8 různých stavů. a b c Ua-b Ub-c Ua-c výstup
0 0 0 0 0 0 nic
1 0 0 +UDC
0 -UDC
0°
1 1 0 0 +UDC
-UDC
60°
0 1 0 -UDC
+UDC
0 120°
0 1 1 -UDC
0 +UDC
180°
0 0 1 0 -UDC
+UDC
240°
1 0 1 +UDC
-UDC
0 300°
1 1 1 0 0 0 nic
B1M14DEP 42
43
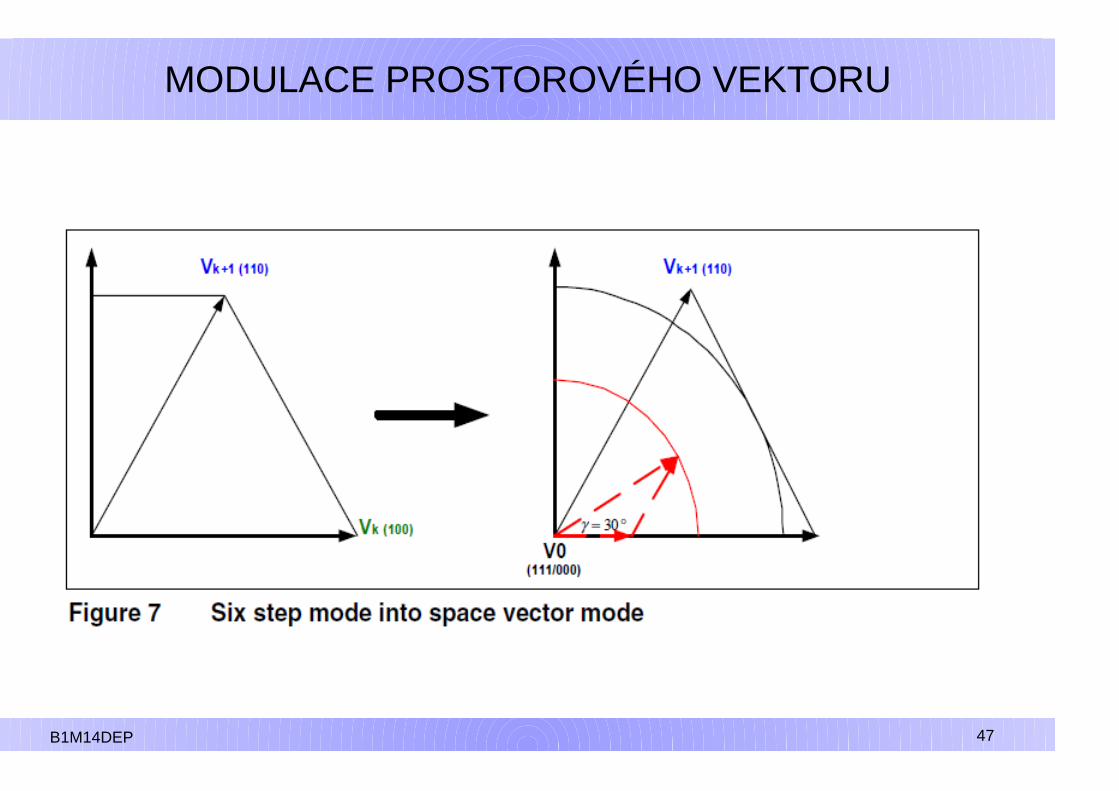
MODULACE PROSTOROVÉHO VEKTORU
B1M14DEP 43
44
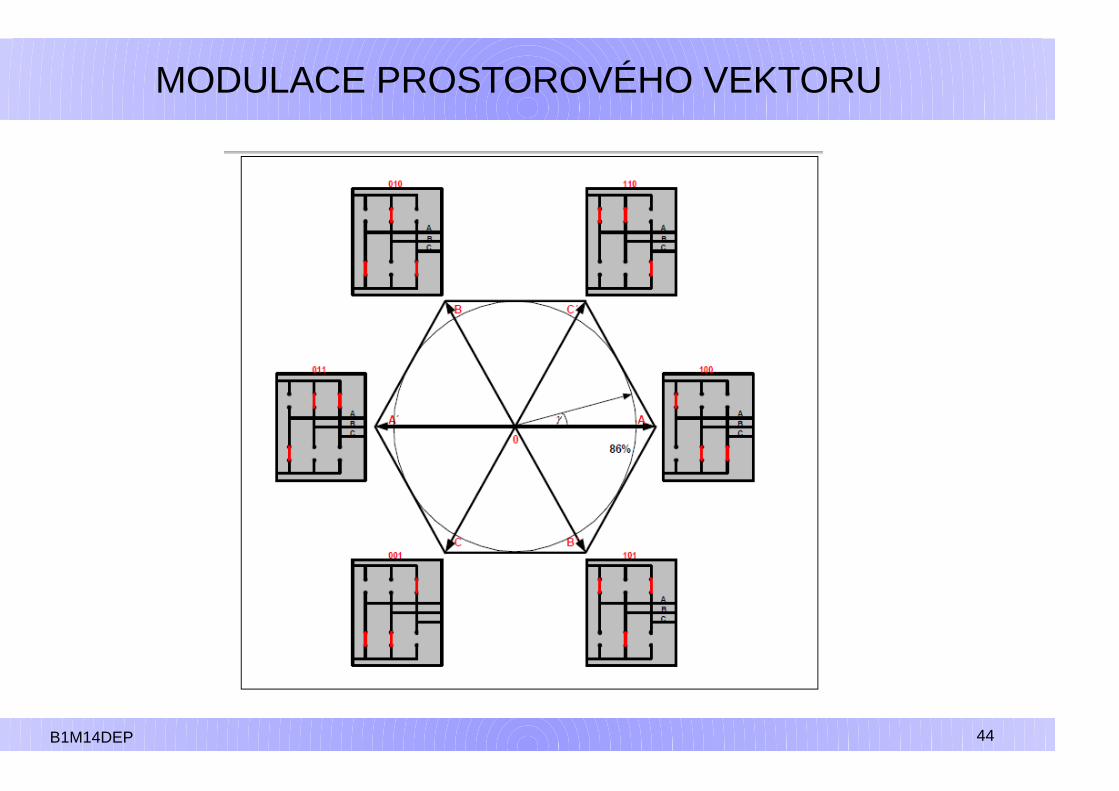
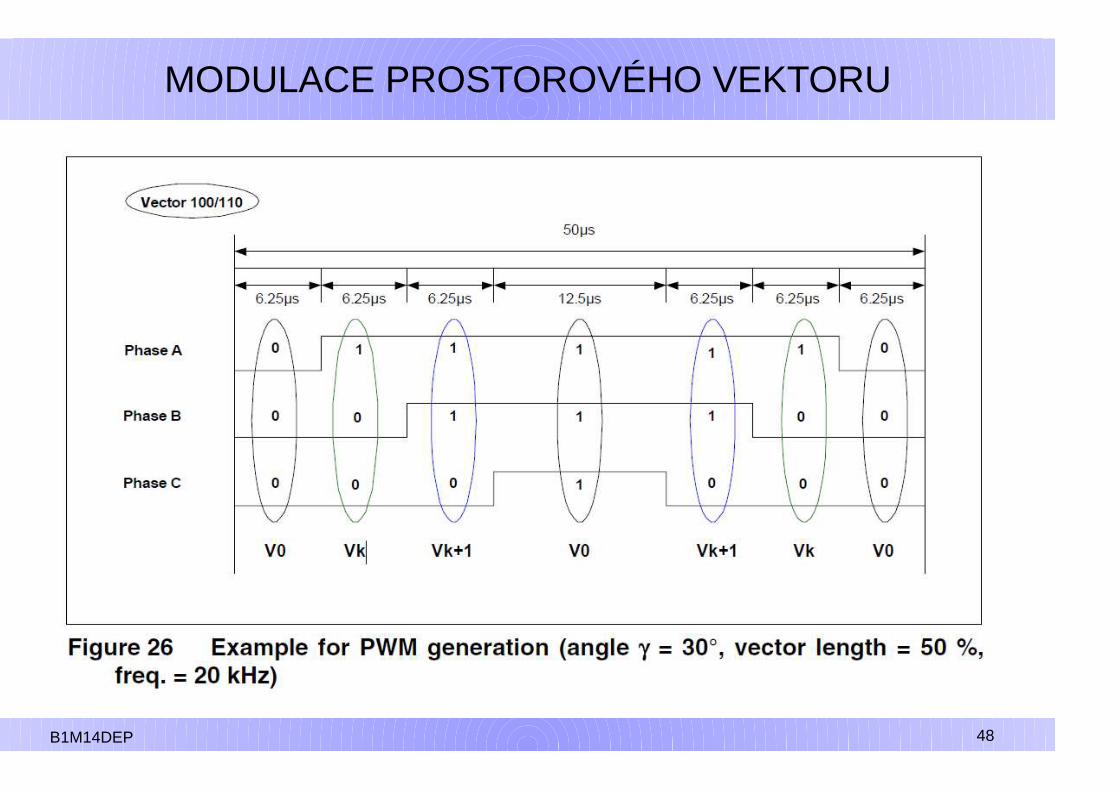
MODULACE PROSTOROVÉHO VEKTORU
B1M14DEP 44
45
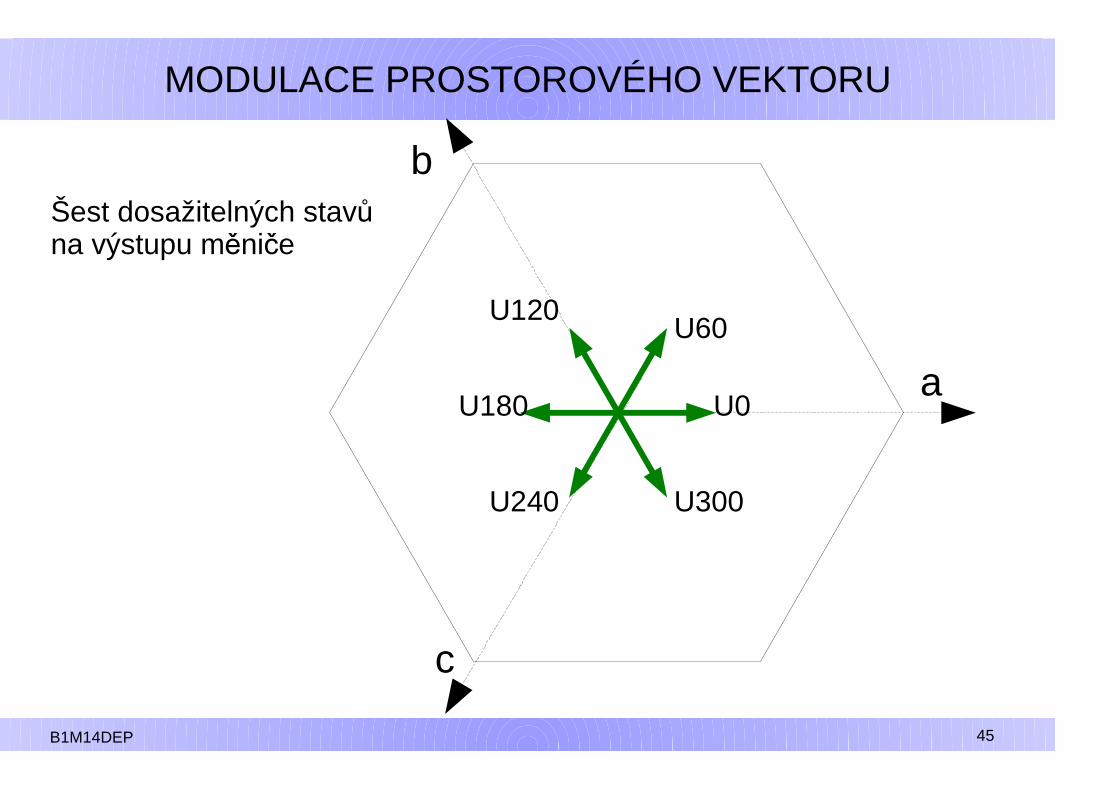
MODULACE PROSTOROVÉHO VEKTORU
a
b
c
U0
U60U120
U180
U240 U300
Šest dosažitelných stavůna výstupu měniče
B1M14DEP 45
46
MODULACE PROSTOROVÉHO VEKTORU
a
b
c
U0
U60
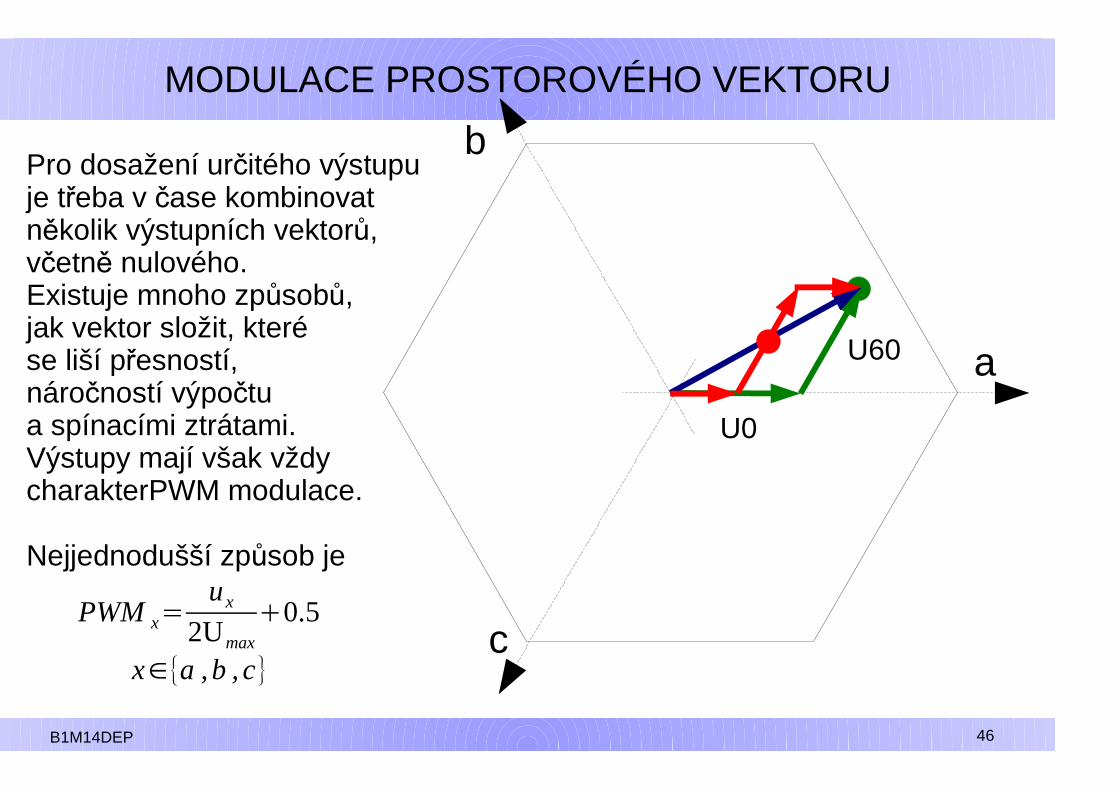
Pro dosažení určitého výstupuje třeba v čase kombinovatněkolik výstupních vektorů,včetně nulového.Existuje mnoho způsobů,jak vektor složit, kterése liší přesností, náročností výpočtua spínacími ztrátami.Výstupy mají však vždycharakterPWM modulace.
Nejjednodušší způsob je
PWMx=ux
2Umax
0.5
x∈{a ,b ,c}
B1M14DEP 46
47
MODULACE PROSTOROVÉHO VEKTORU
B1M14DEP 47
48B1M14DEP 48
MODULACE PROSTOROVÉHO VEKTORU
49
Digital Control of Electric Drives
Konec
B1M14DEP 49