variadores de velocidad
TRANSCRIPT
Universidad Tecnológica Nacional – FRH
Cátedra de electrónica de potencia 1 de 16
Universidad Tecnológica Nacional Facultad Regional Heado
ELECTRÓNICA DE POTENCIA
Variación de velocidad para motores de inducción de Corriente Alterna
Bibliografía: � Electrónica de potencia de Muhammad Rashid, Editorial Pearson. � Electrónica de Potencia de Daniel Hart, Editorial Pearson . � Máquinas eléctricas de Marcelo Antonio Sobrevila, Editorial Alsina.
Autores: � Ing. Rubén Bufanio � Ing. Germán García Motto

Universidad Tecnológica Nacional – FRH
Cátedra de electrónica de potencia 2 de 16
Introducción Cada vez es mas pronunciada la utilización de variadores de velocidad para el control de motores de inducción de corriente alterna (CA), relegando a los motores de corriente continua (CC) con variador de velocidad a tareas específicas. Esto se debe a que los motores de corriente alterna son mas veloces (2 o 3 veces), poseen menos mantenimiento y son mas económicos. En un principio podría ser mas complejo el desarrollo e implementación del control para motores de CA frente a los de CC, pero el avance en la electrónica de procesamiento logró remediar este problema. Características del motor de inducción Antes de arrancar con posibles métodos de variación de velocidad, es importante conocer los parámetros del motor sobre los que se debe actuar para lograr dicho objetivo. Para ello tenemos que conocer como funciona el motor en sus rasgos generales, haciendo las aproximaciones del caso. Como toda máquina rotante, esta compuesto por un rotor o inducido y una parte fija o estator en donde, en este caso, se hace la alimentación desde la red trifásica equilibrada. La corriente aplicada a dicho estator genera un campo rotante a una velocidad que dependera de la siguiente expresión:
1 p
fNs
⋅= 60
Donde:
• Ns : Velocidad sincrónica del campo giratorio [RPM] • f : Frecuencia de la alimentación aplicada al estator [Hz]
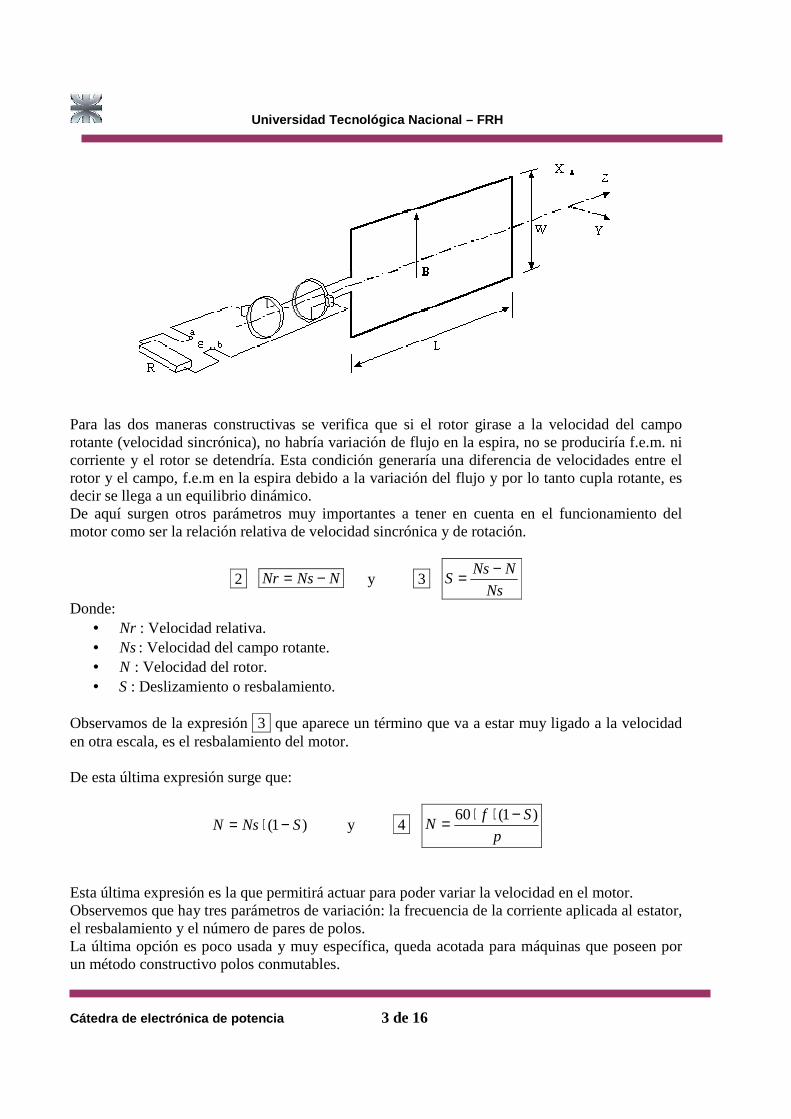
• p : Nro. de pares de polos. Si ahora se coloca en el espacio de acción de dicho campo una espira en cortocircuito (rotor) solidaria a un eje, sobre esta se inducirá una f.e.m. Como dicha espira esta cerrada circulará un corriente y por lo tanto aparecerán fuerzas que la harán rotar. De esta manera llevando el análisis de dicha espira al rotor, este girará en la dirección que lo hace el campo rotante. Hay maneras de construir el rotor, una de ellas es en corto circuito o denominado “a rotor en corto circuito” o “jaula de ardilla” y el otro es el rotor bobinado. En este último caso la espira esta abierta y se conecta al exterior a través de anillos rozantes en donde se cierra el circuito por medio de uno o varios resistores variables.
Universidad Tecnológica Nacional – FRH
Cátedra de electrónica de potencia 3 de 16
Para las dos maneras constructivas se verifica que si el rotor girase a la velocidad del campo rotante (velocidad sincrónica), no habría variación de flujo en la espira, no se produciría f.e.m. ni corriente y el rotor se detendría. Esta condición generaría una diferencia de velocidades entre el rotor y el campo, f.e.m en la espira debido a la variación del flujo y por lo tanto cupla rotante, es decir se llega a un equilibrio dinámico. De aquí surgen otros parámetros muy importantes a tener en cuenta en el funcionamiento del motor como ser la relación relativa de velocidad sincrónica y de rotación.
2 NNsNr −= y 3 Ns
NNsS
−=
Donde: • Nr : Velocidad relativa. • Ns : Velocidad del campo rotante. • N : Velocidad del rotor. • S : Deslizamiento o resbalamiento.
Observamos de la expresión 3 que aparece un término que va a estar muy ligado a la velocidad en otra escala, es el resbalamiento del motor. De esta última expresión surge que:
)1( SNsN −⋅= y 4 p
SfN
)1(60 −⋅⋅=
Esta última expresión es la que permitirá actuar para poder variar la velocidad en el motor. Observemos que hay tres parámetros de variación: la frecuencia de la corriente aplicada al estator, el resbalamiento y el número de pares de polos. La última opción es poco usada y muy específica, queda acotada para máquinas que poseen por un método constructivo polos conmutables.
Universidad Tecnológica Nacional – FRH
Cátedra de electrónica de potencia 4 de 16
Por lo tanto para nuestro análisis nos quedan dos parámetros (S y f). Para nuestro estudio, surgen tres métodos de variación de velocidad (hay más):
• Variando la tensión de alimentación estatórica. • Variando la tensión rotórica. • Variando la tensión y la frecuencia.
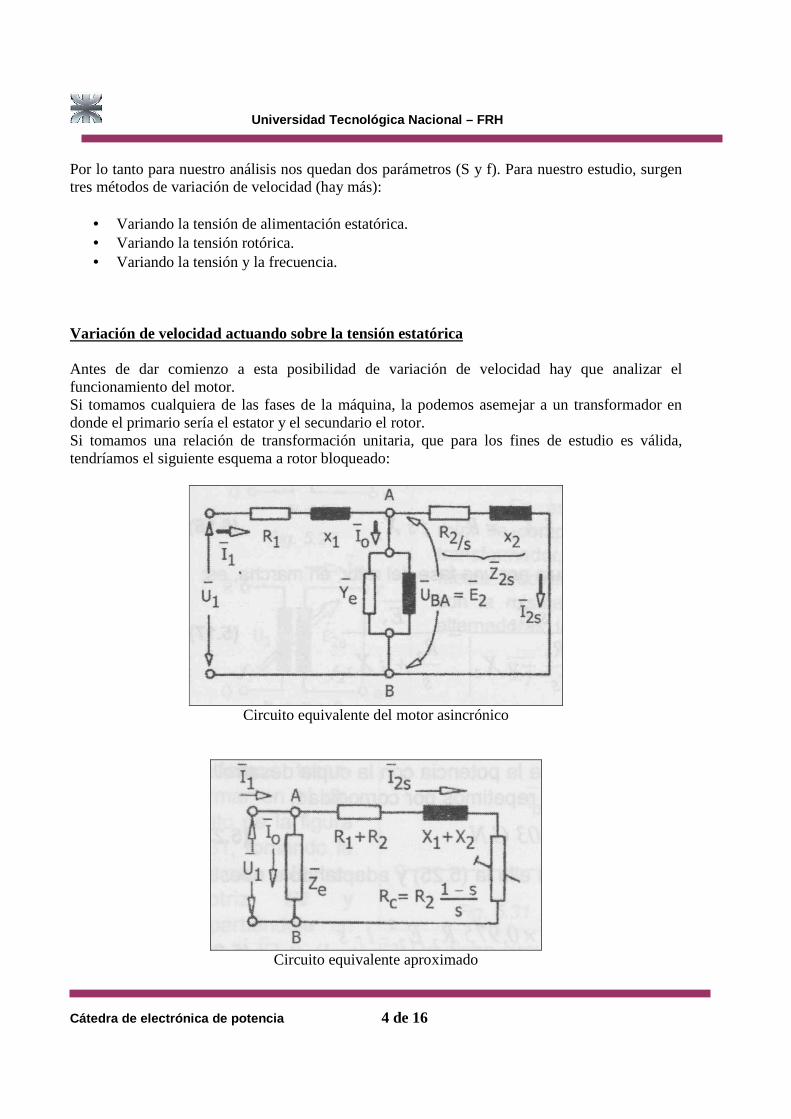
Variación de velocidad actuando sobre la tensión estatórica Antes de dar comienzo a esta posibilidad de variación de velocidad hay que analizar el funcionamiento del motor. Si tomamos cualquiera de las fases de la máquina, la podemos asemejar a un transformador en donde el primario sería el estator y el secundario el rotor. Si tomamos una relación de transformación unitaria, que para los fines de estudio es válida, tendríamos el siguiente esquema a rotor bloqueado:
Circuito equivalente del motor asincrónico
Circuito equivalente aproximado
Universidad Tecnológica Nacional – FRH
Cátedra de electrónica de potencia 5 de 16
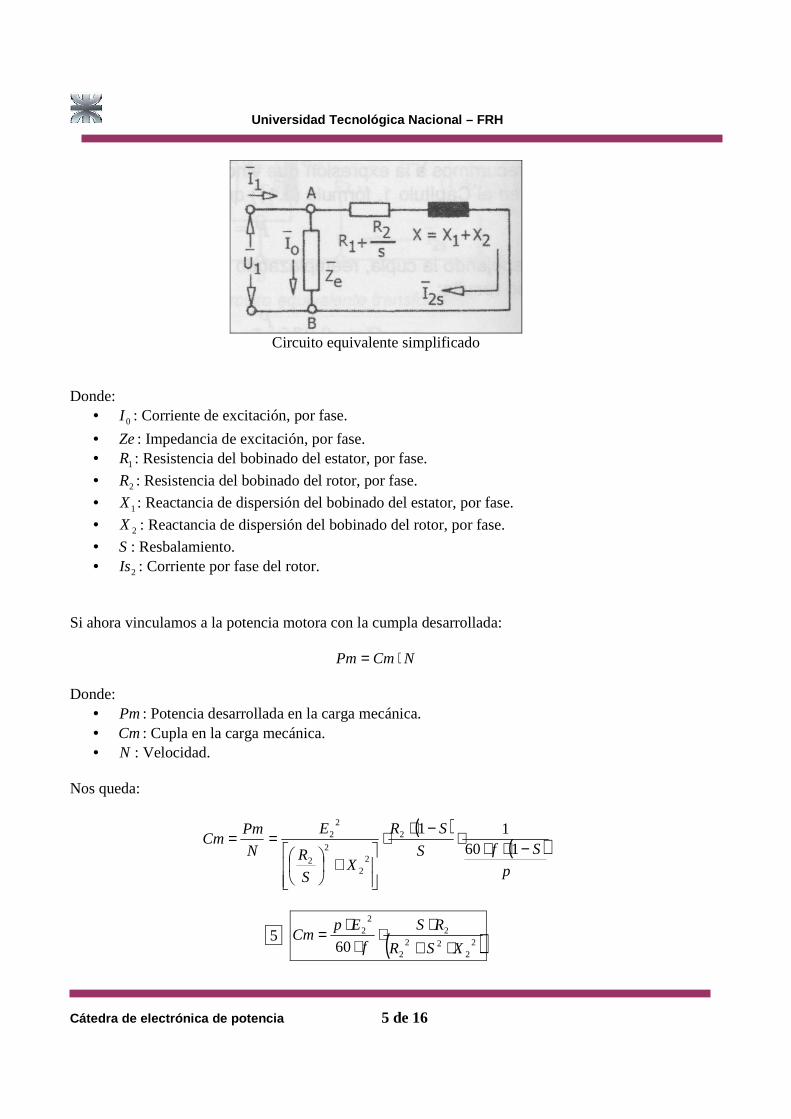
Circuito equivalente simplificado
Donde: • 0I : Corriente de excitación, por fase.
• Ze : Impedancia de excitación, por fase. • 1R : Resistencia del bobinado del estator, por fase.
• 2R : Resistencia del bobinado del rotor, por fase.
• 1X : Reactancia de dispersión del bobinado del estator, por fase.
• 2X : Reactancia de dispersión del bobinado del rotor, por fase.
• S : Resbalamiento. • 2Is : Corriente por fase del rotor.
Si ahora vinculamos a la potencia motora con la cumpla desarrollada:
NCmPm ⋅= Donde:
• Pm : Potencia desarrollada en la carga mecánica. • Cm : Cupla en la carga mecánica. • N : Velocidad.
Nos queda:
( )( )
p
SfS
SR
XS
R
E
N
PmCm
−⋅⋅⋅
−⋅⋅
+
==
160112
22
2
2
22
5 ( )22
222
22
2
60 XSR
RS
f
EpCm
⋅+⋅⋅
⋅⋅=

Universidad Tecnológica Nacional – FRH
Cátedra de electrónica de potencia 6 de 16
Dado que por lo general se admite una relación de transformación unitaria:
6 ( )22
222
22
1
60 XSR
RS
f
EpCm
⋅+⋅
⋅⋅
⋅= 11 UE ≅
Donde 1U es la tensión aplicada al estator. Siendo la cupla total Ct aquella que surge de una potencia transferida del estator al rotor en donde tendríamos que tener en cuenta las pérdidas en el bobinado estatórico:
7 22
2 RIsPmPPmPt R ⋅+=+=
Donde RP es la potencia de pérdida rotórica.
( )S
RIsR
S
SRIsPt 22
2222
2
1 ⋅=
+−⋅⋅=
( ) SRIsSRIsPtS ⋅⋅+−⋅⋅=⋅ 22
222
2 1
RPRIsPtS =⋅=⋅ 22
2 Reemplazando en 7 :
PtSPmPt ⋅+=
( )SPtPm −⋅= 1
8 ( )S
PmPt
−=
1
Teniendo en cuenta todas las resistencias y las reactancias del estator y del rotor, nos queda que la cupla total es:
( )Ns
XXS
RRS
URCt
1
221
2
21
212 ⋅
++
+⋅
⋅=
Universidad Tecnológica Nacional – FRH
Cátedra de electrónica de potencia 7 de 16
9
( )f
p
XXS
RRS
URCt
⋅⋅
++
+⋅
⋅=
602
21
2
21
212
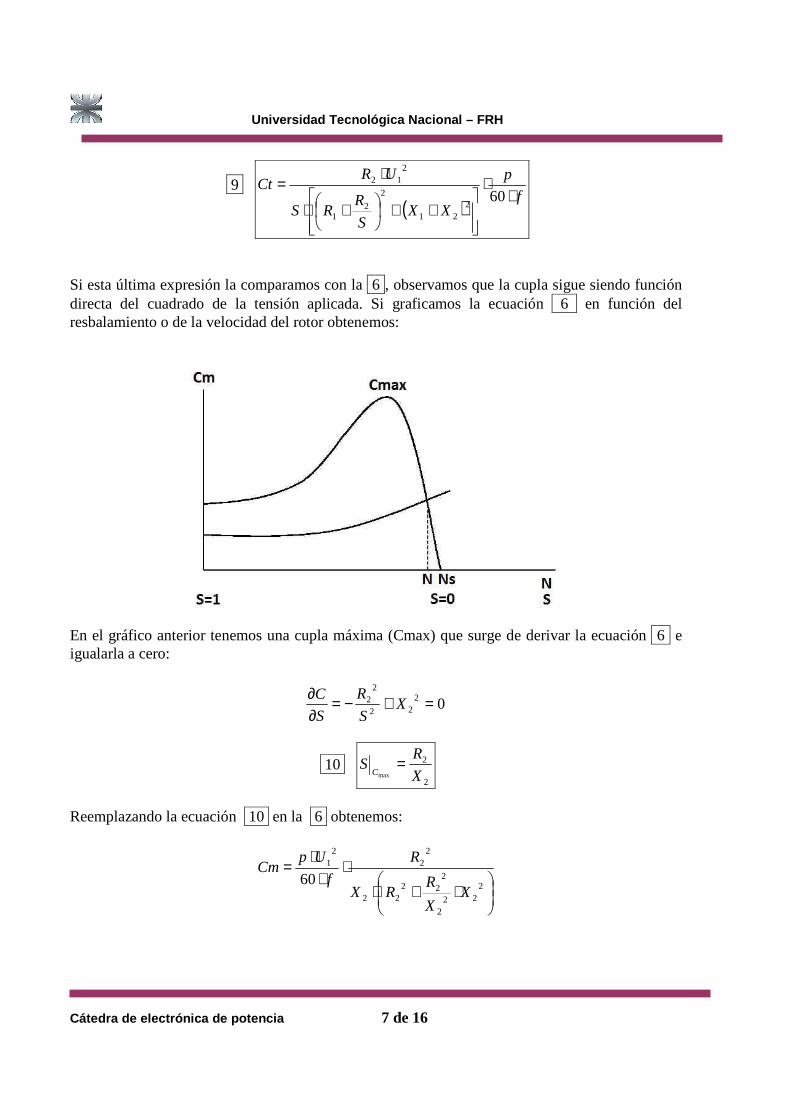
Si esta última expresión la comparamos con la 6 , observamos que la cupla sigue siendo función directa del cuadrado de la tensión aplicada. Si graficamos la ecuación 6 en función del resbalamiento o de la velocidad del rotor obtenemos:
En el gráfico anterior tenemos una cupla máxima (Cmax) que surge de derivar la ecuación 6 e igualarla a cero:
0222
22 =+−=
∂∂
XS
R
S
C
10 2
2
max X
RS
C=
Reemplazando la ecuación 10 en la 6 obtenemos:
⋅+⋅
⋅⋅
⋅=
222
2
222
22
22
21
60X
X
RRX
R
f
UpCm
Universidad Tecnológica Nacional – FRH
Cátedra de electrónica de potencia 8 de 16
11 2
21
2
1
60 Xf
UpCmMAX ⋅
⋅⋅=
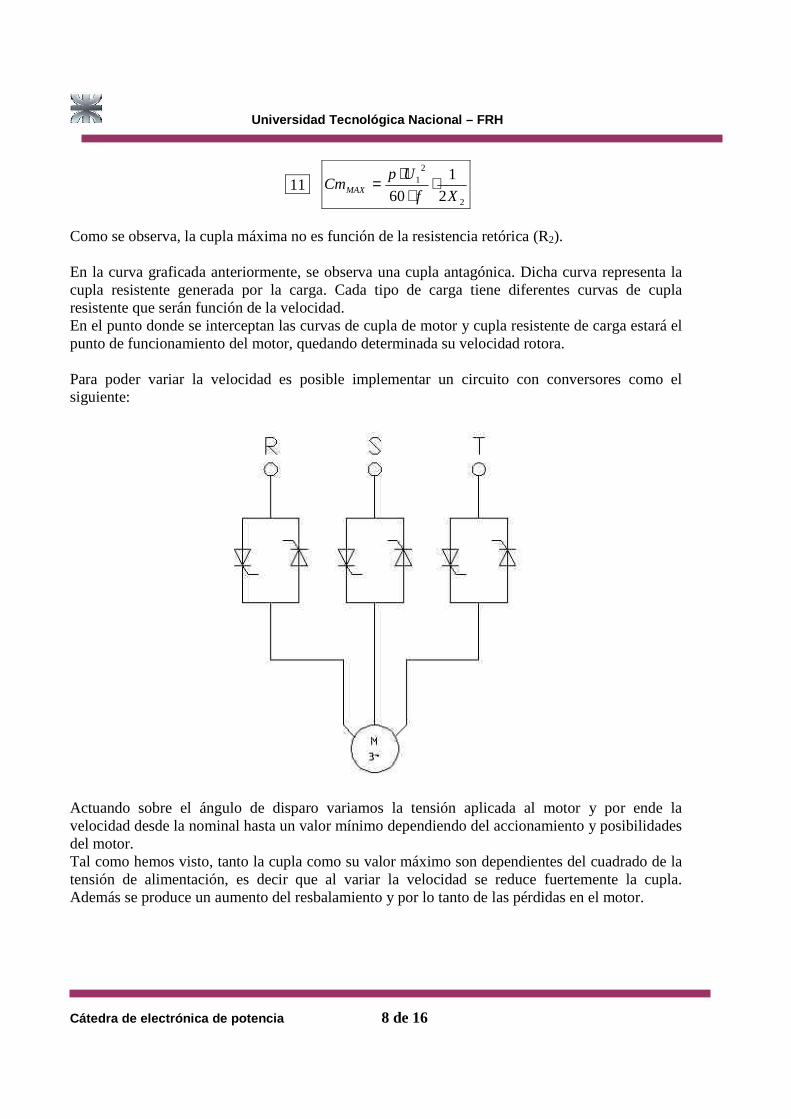
Como se observa, la cupla máxima no es función de la resistencia retórica (R2). En la curva graficada anteriormente, se observa una cupla antagónica. Dicha curva representa la cupla resistente generada por la carga. Cada tipo de carga tiene diferentes curvas de cupla resistente que serán función de la velocidad. En el punto donde se interceptan las curvas de cupla de motor y cupla resistente de carga estará el punto de funcionamiento del motor, quedando determinada su velocidad rotora. Para poder variar la velocidad es posible implementar un circuito con conversores como el siguiente:
Actuando sobre el ángulo de disparo variamos la tensión aplicada al motor y por ende la velocidad desde la nominal hasta un valor mínimo dependiendo del accionamiento y posibilidades del motor. Tal como hemos visto, tanto la cupla como su valor máximo son dependientes del cuadrado de la tensión de alimentación, es decir que al variar la velocidad se reduce fuertemente la cupla. Además se produce un aumento del resbalamiento y por lo tanto de las pérdidas en el motor.
Universidad Tecnológica Nacional – FRH
Cátedra de electrónica de potencia 9 de 16
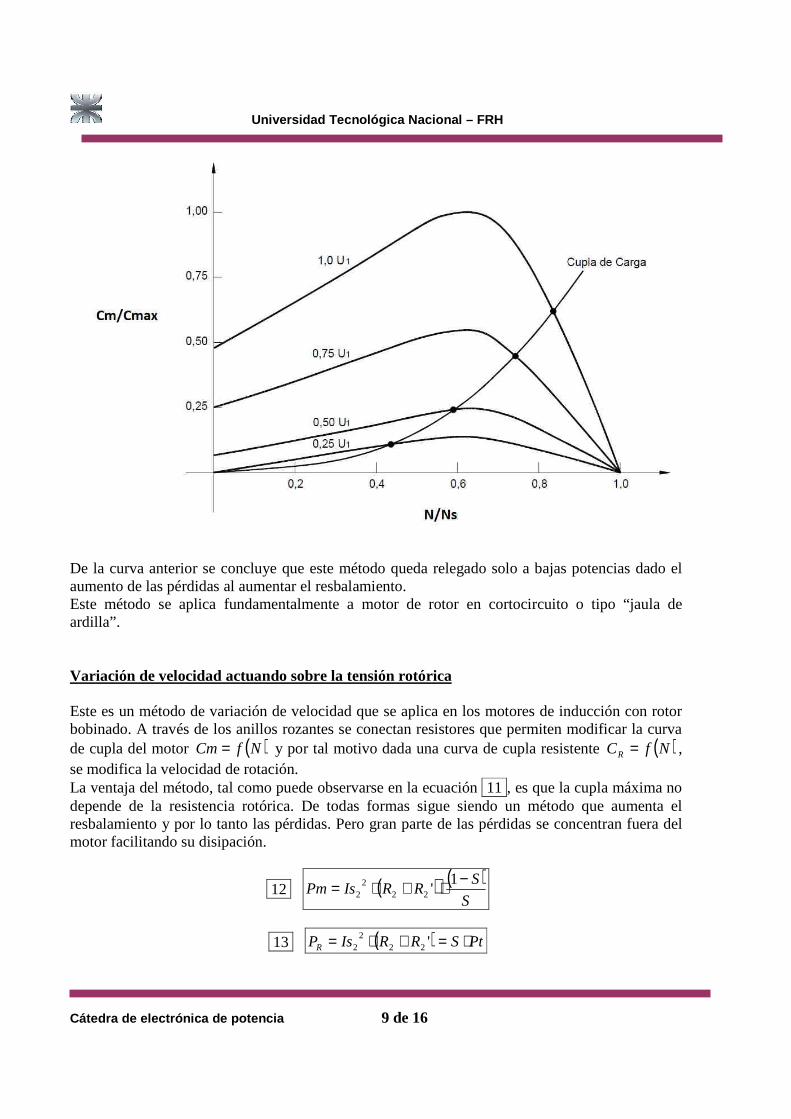
De la curva anterior se concluye que este método queda relegado solo a bajas potencias dado el aumento de las pérdidas al aumentar el resbalamiento. Este método se aplica fundamentalmente a motor de rotor en cortocircuito o tipo “jaula de ardilla”. Variación de velocidad actuando sobre la tensión rotórica Este es un método de variación de velocidad que se aplica en los motores de inducción con rotor bobinado. A través de los anillos rozantes se conectan resistores que permiten modificar la curva de cupla del motor ( )NfCm = y por tal motivo dada una curva de cupla resistente ( )NfCR = , se modifica la velocidad de rotación. La ventaja del método, tal como puede observarse en la ecuación 11 , es que la cupla máxima no depende de la resistencia rotórica. De todas formas sigue siendo un método que aumenta el resbalamiento y por lo tanto las pérdidas. Pero gran parte de las pérdidas se concentran fuera del motor facilitando su disipación.
12 ( ) ( )S
SRRIsPm
−⋅+⋅= 1'22
22
13 ( ) PtSRRIsPR ⋅=+⋅= '222
2
Universidad Tecnológica Nacional – FRH
Cátedra de electrónica de potencia 10 de 16
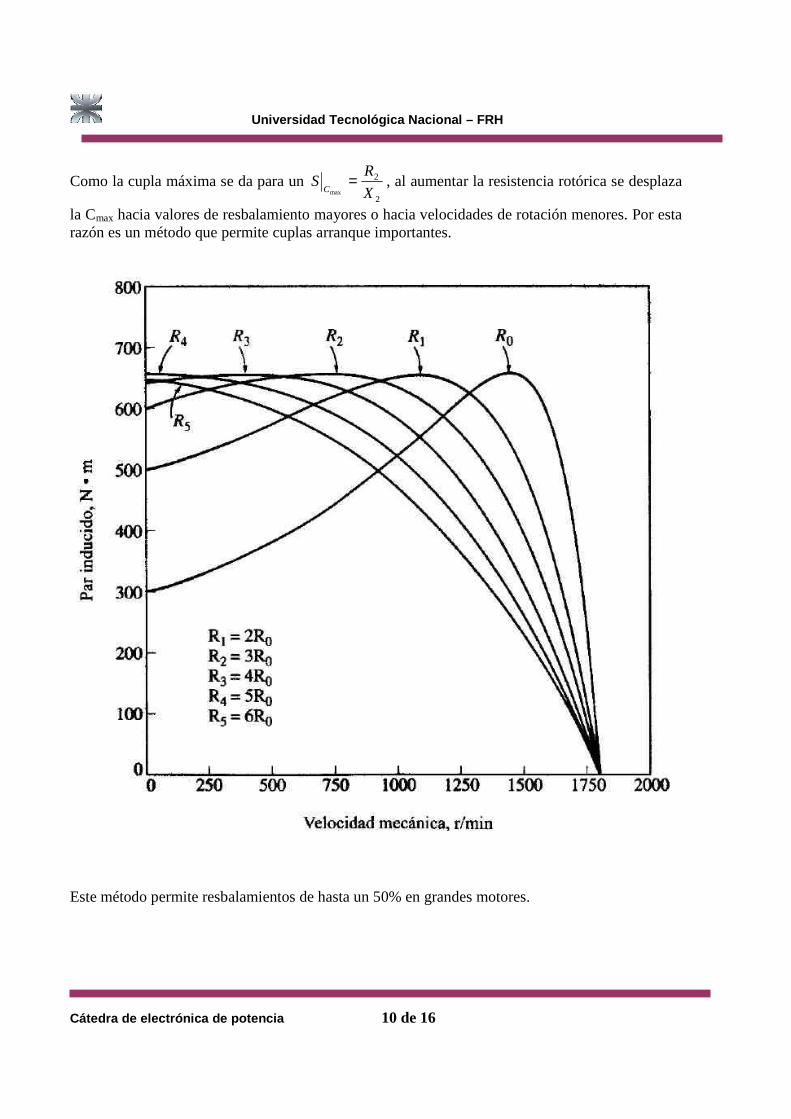
Como la cupla máxima se da para un 2
2
max X
RS
C= , al aumentar la resistencia rotórica se desplaza
la Cmax hacia valores de resbalamiento mayores o hacia velocidades de rotación menores. Por esta razón es un método que permite cuplas arranque importantes.
Este método permite resbalamientos de hasta un 50% en grandes motores.
Universidad Tecnológica Nacional – FRH
Cátedra de electrónica de potencia 11 de 16
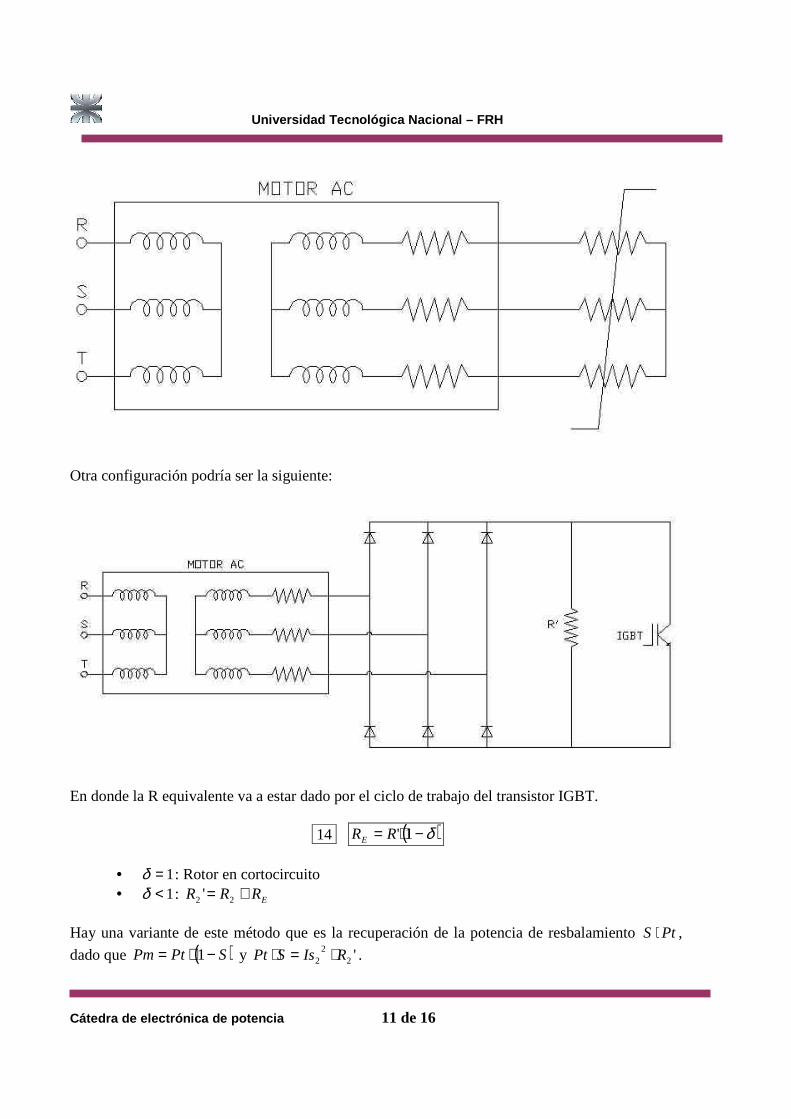
Otra configuración podría ser la siguiente:
En donde la R equivalente va a estar dado por el ciclo de trabajo del transistor IGBT.
14 ( )δ−⋅= 1'RRE
• 1=δ : Rotor en cortocircuito • 1<δ : ERRR += 22 '
Hay una variante de este método que es la recuperación de la potencia de resbalamiento PtS ⋅ ,
dado que ( )SPtPm −⋅= 1 y '22
2 RIsSPt ⋅=⋅ .
Universidad Tecnológica Nacional – FRH
Cátedra de electrónica de potencia 12 de 16
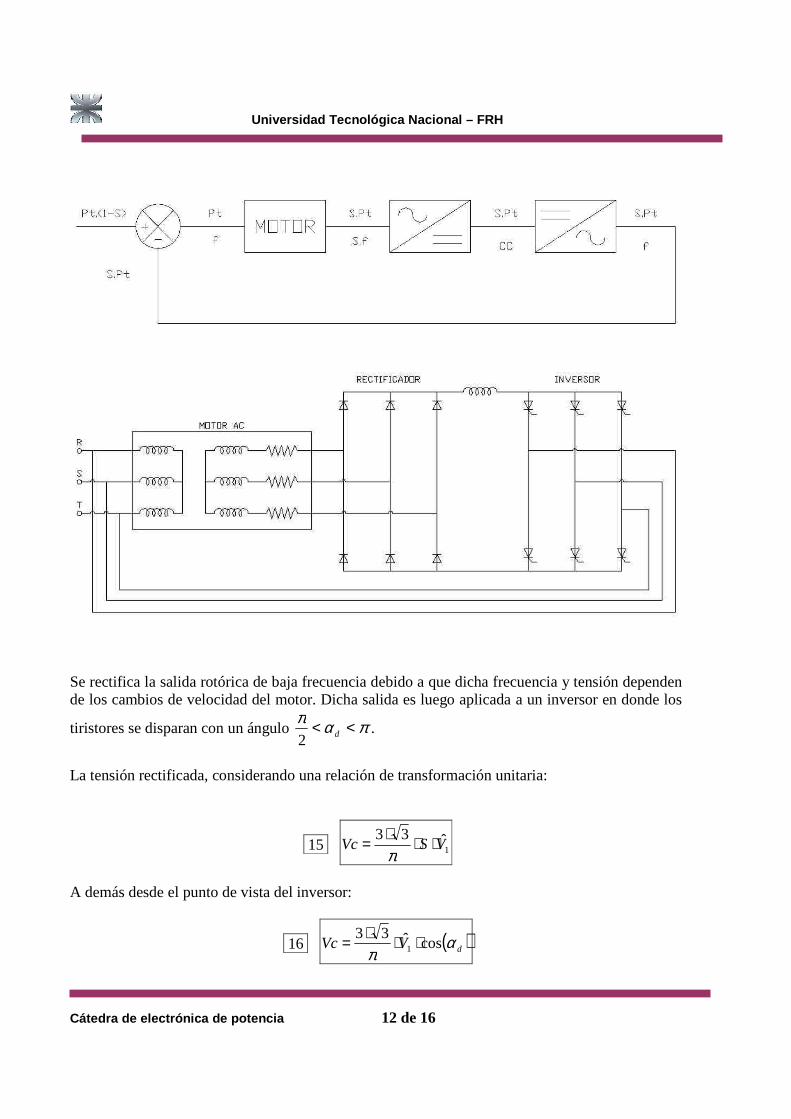
Se rectifica la salida rotórica de baja frecuencia debido a que dicha frecuencia y tensión dependen de los cambios de velocidad del motor. Dicha salida es luego aplicada a un inversor en donde los
tiristores se disparan con un ángulo παπ << d2.
La tensión rectificada, considerando una relación de transformación unitaria:
15 1̂
33VSVc ⋅⋅⋅=
π
A demás desde el punto de vista del inversor:
16 ( )dVVc απ
cosˆ331 ⋅⋅⋅=

Universidad Tecnológica Nacional – FRH
Cátedra de electrónica de potencia 13 de 16
Igualando 15 y 16 :
17 ( )dS αcos=
Este método de variación se denomina “método de Kramer” y es utilizado en grandes bombas y sopladores donde se requiere grandes cuplas de arranque y poca variación de velocidad. Variación de velocidad actuando sobre la tensión y la frecuencia de alimentación Hasta ahora para variar la velocidad hemos actuado sobre el resbalamiento pero ya se ha visto los inconvenientes que se presentan dado que el rendimiento es función del resbalamiento.
18 S−= 1η Se deduce de la ecuación 8 .
Los dos métodos vistos anteriormente permiten variar la velocidad a expensas de aumentar las pérdidas. Esté esquema propone trabajar cerca de la velocidad sincrónica, variando la frecuencia de alimentación estatórica (f ), con muy buen rendimiento para el motor de “Jaula de ardilla”. Para no exceder el flujo nominal del motor y no saturarlo se debe variar conjuntamente la tensión aplicada.
fkE ⋅⋅= φ1 ⇒ f
Ekcte 1⋅==φ
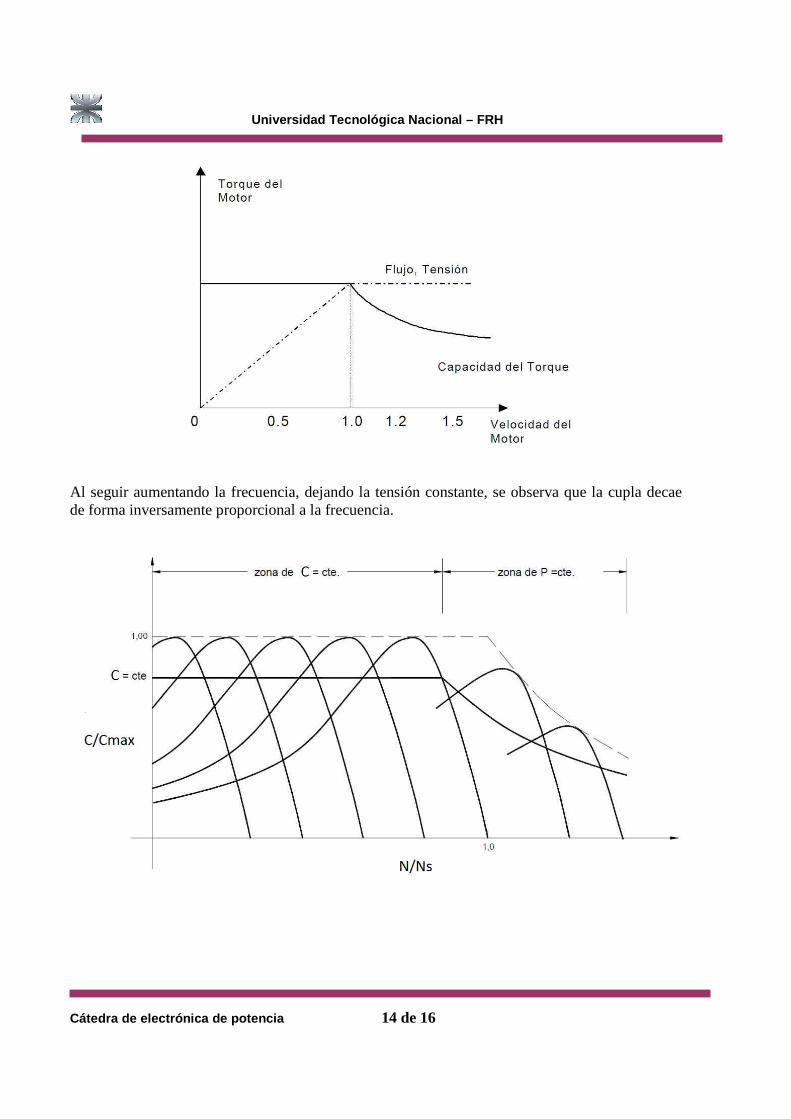
Si se desea trabajar por encima de la velocidad nominal, se sigue aumentando la frecuencia pero se debe mantener la tensión constante, igual a la tensión nominal del motor, para no exceder la potencia nominal.
( )Sp
fN −⋅⋅= 1
60
Universidad Tecnológica Nacional – FRH
Cátedra de electrónica de potencia 14 de 16
Al seguir aumentando la frecuencia, dejando la tensión constante, se observa que la cupla decae de forma inversamente proporcional a la frecuencia.
Universidad Tecnológica Nacional – FRH
Cátedra de electrónica de potencia 15 de 16
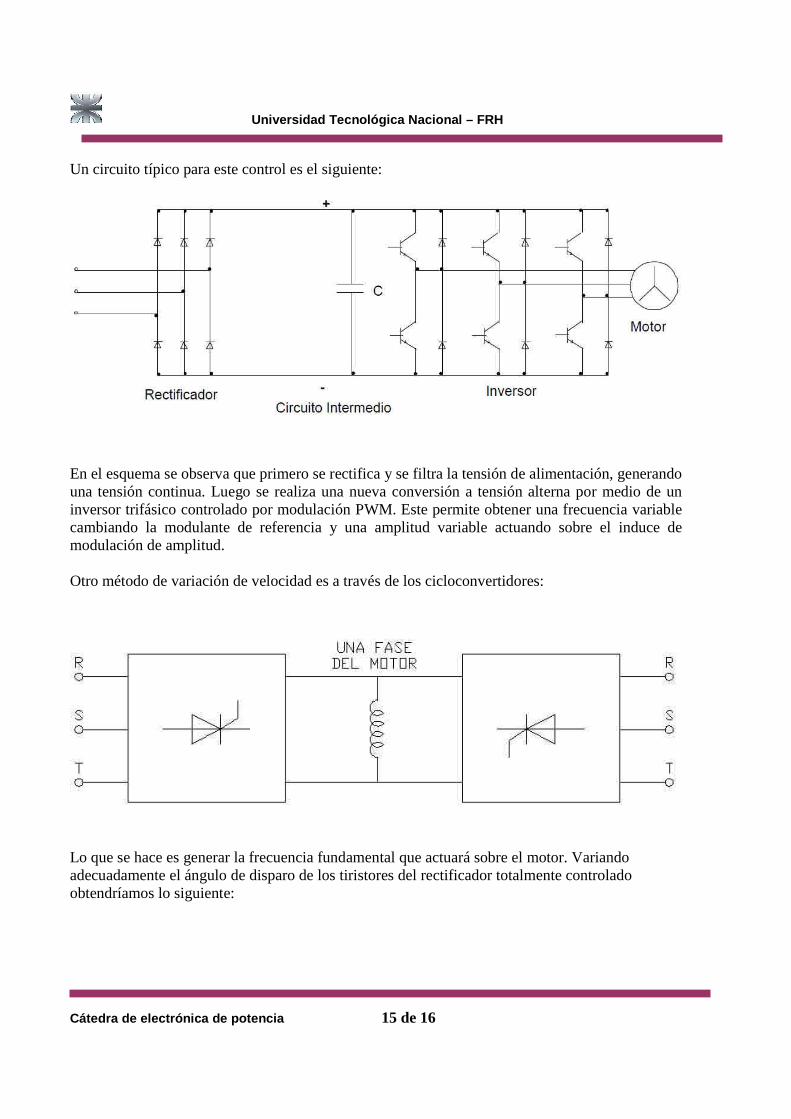
Un circuito típico para este control es el siguiente:
En el esquema se observa que primero se rectifica y se filtra la tensión de alimentación, generando una tensión continua. Luego se realiza una nueva conversión a tensión alterna por medio de un inversor trifásico controlado por modulación PWM. Este permite obtener una frecuencia variable cambiando la modulante de referencia y una amplitud variable actuando sobre el induce de modulación de amplitud. Otro método de variación de velocidad es a través de los cicloconvertidores:
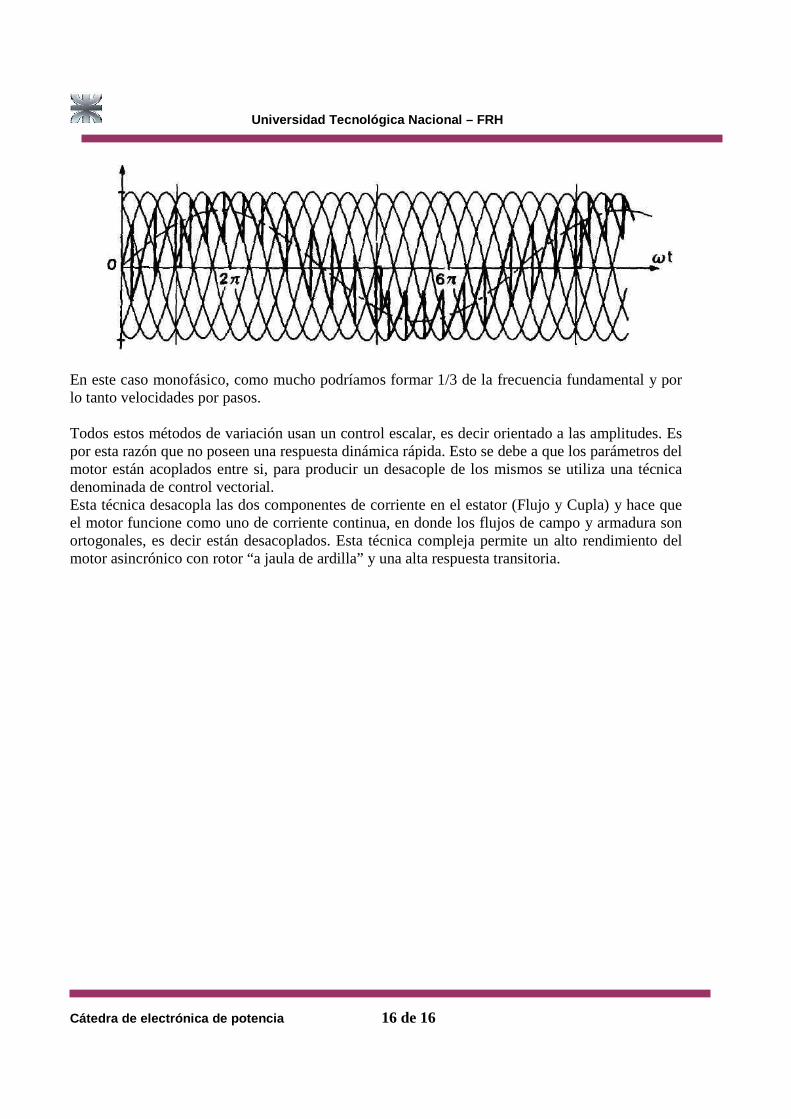
Lo que se hace es generar la frecuencia fundamental que actuará sobre el motor. Variando adecuadamente el ángulo de disparo de los tiristores del rectificador totalmente controlado obtendríamos lo siguiente:
Universidad Tecnológica Nacional – FRH
Cátedra de electrónica de potencia 16 de 16
En este caso monofásico, como mucho podríamos formar 1/3 de la frecuencia fundamental y por lo tanto velocidades por pasos. Todos estos métodos de variación usan un control escalar, es decir orientado a las amplitudes. Es por esta razón que no poseen una respuesta dinámica rápida. Esto se debe a que los parámetros del motor están acoplados entre si, para producir un desacople de los mismos se utiliza una técnica denominada de control vectorial. Esta técnica desacopla las dos componentes de corriente en el estator (Flujo y Cupla) y hace que el motor funcione como uno de corriente continua, en donde los flujos de campo y armadura son ortogonales, es decir están desacoplados. Esta técnica compleja permite un alto rendimiento del motor asincrónico con rotor “a jaula de ardilla” y una alta respuesta transitoria.