transformada zzzz
DESCRIPTION
1TRANSCRIPT

Transformada Z
Definição
É uma transformação aplicada a sinais de tempo discreto para o domínio da variável complexa. Z. É semelhante à
Transformada de Laplace, porém aplicada a sinais de tempo discreto. A Transformada Z direta é dada por:
E a Transformada Z inversa é dada por:
Ou seja, pela fórmula mais complicada, raramente utilizaremos a definição para calcular a transformada Z inversa.
Propriedades e Teoremas da Transformada Z
Linearidade
Prova: Definição
Deslocamento para direita de f[n]u[n] no tempo discreto
Prova:

Deslocamento para direita de f[n] no tempo discreto
É a generalização da propriedade anterior considerando os valores de f[n] para n < 0.
Prova:
Para m=1, temos:
E para m=2:
Essas expressões são semelhantes às obtidas para as derivadas na transformada de Laplace. A explicação é que, em
tempo discreto, as equações de diferenças são equivalentes às equações diferenciais.

Deslocamento para esquerda de f[n] no tempo discreto
Prova:
Para m=1, temos:
E para m=2:
Multiplicação por an no tempo discreto
Prova:
Multiplicação por e-naT no tempo discreto
Prova:
Multiplicação por n e n2 no tempo discreto
Prova:
Somatório dos termos da sequência no tempo discreto
Prova:

Convolução no tempo discreto
Seja x[n] uma sequência causal (x[n] = 0, para n < 0) e seja h[n] a resposta ao impulso de um sistema causal, ou seja,
h[n] = Z {δ[n]} onde δ[n] é o impulso unitário no tempo discreto. Como o sistema é causal também temos h[n] = 0,
para n < 0.
Podemos escrever uma sequência x[n] pelo valor de seus termos, ou seja, x[n] = {x[0], x[1], ..., x[m], ...}
Mas,
Então y[n], que é a resposta do sistema à entrada x[n], pode ser escrita como:
Ou, escrevendo em forma de convolução discreta:
y[n] = x[n] * h[n]

Transformada da Convolução no tempo discreto
Se,
Então:
Prova:
Transformada da multiplicação de sequências no tempo discreto
Teorema do Valor Inicial
Prova:
Teorema do Valor Final
Prova:
Transformadas Z de funções comuns no tempo discreto
Transformada da sequência geométrica
Seja a sequência geométrica f[n] definida por:
e:
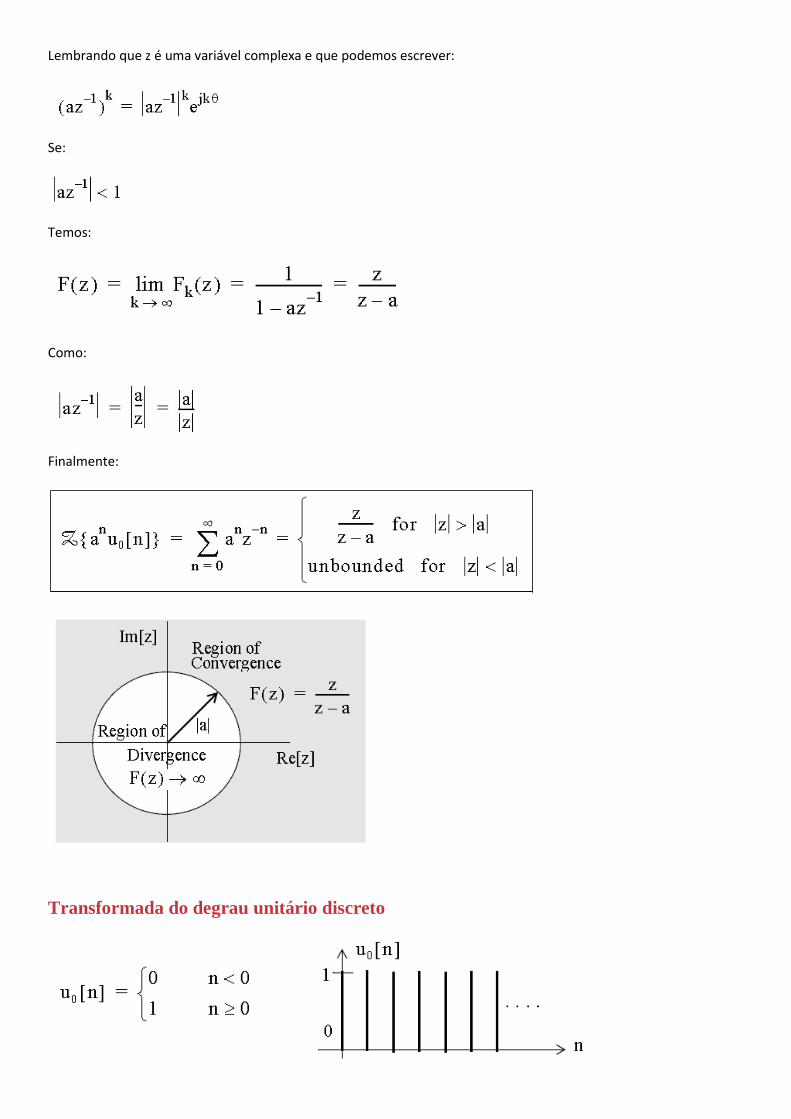
Lembrando que z é uma variável complexa e que podemos escrever:
Se:
Temos:
Como:
Finalmente:
Transformada do degrau unitário discreto

Fazendo a = 1, temos:
Transformada da sequência exponencial discreta
Fazendo a = e-aT
Transformada do seno e cosseno discretos no tempo
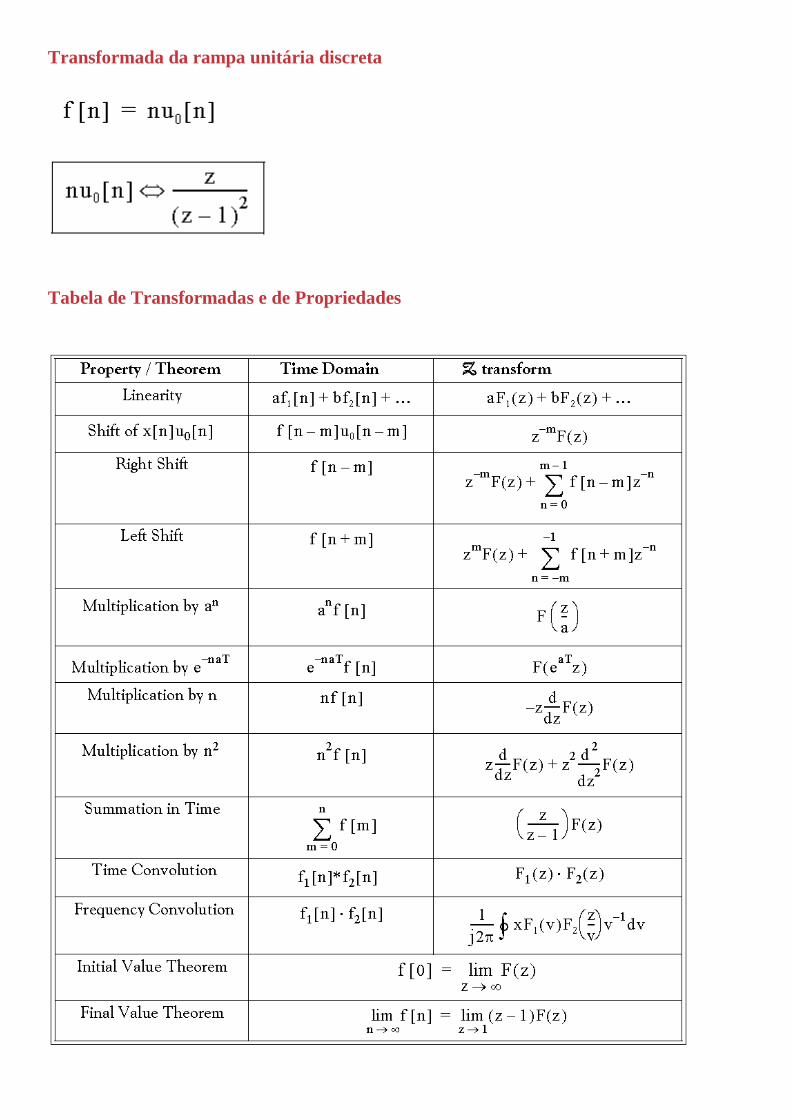
Transformada da rampa unitária discreta
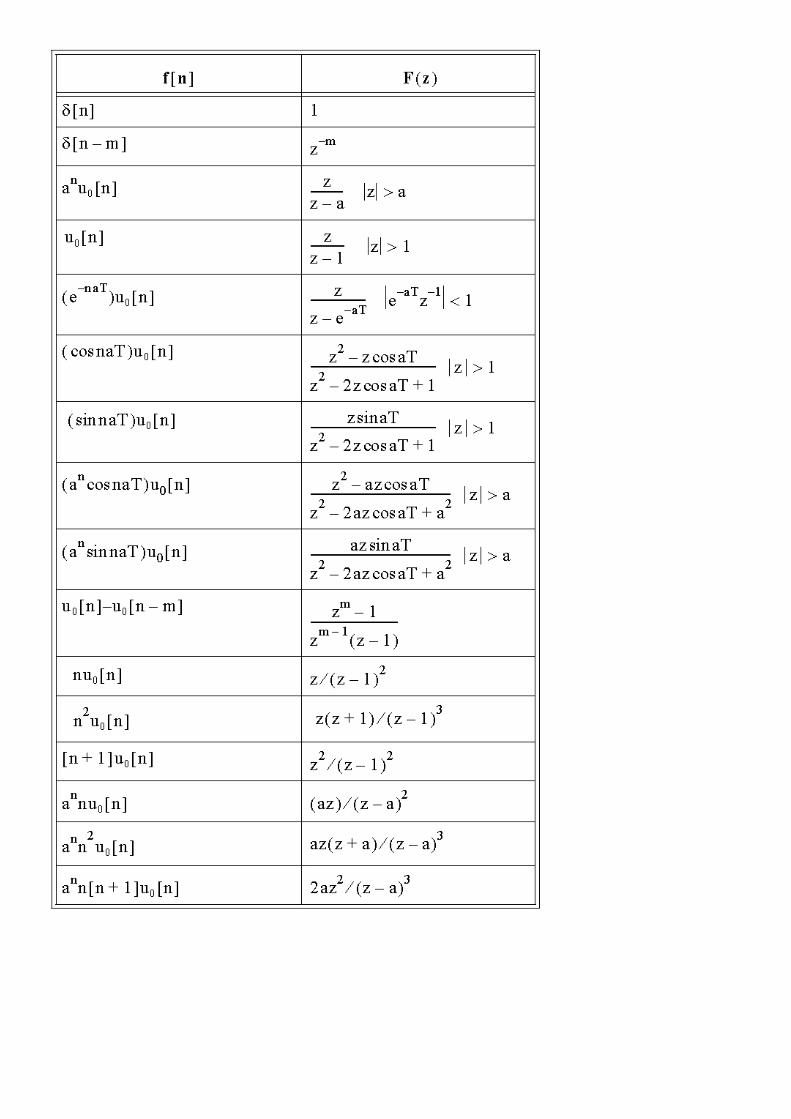
Tabela de Transformadas e de Propriedades

Transformada Z inversa
Expansão em Frações Parciais
É o método utilizado também na Transformada de Laplace Inversa. A única diferença é que, como vimos na tabela,
as transformadas conhecidas são do tipo:
Utilizaremos um artifício para colocar o “z” no numerador de cada fração parcial. Para isto, basta expandirmos F(z)/z
ao invés de somente F(z), ou seja:
Depois é só multiplicar tudo por z e teremos as frações parciais desejadas.
Examplos
Calcule a transformada inversa das funções abaixo:
Divisão Longa de Polinômios
Outra forma de se obter a transformada Z inversa é utilizar a divisão longa de polinômios. Este método não dá uma
forma “fechada” para a sequência f[n], mas é adequado quando queremos descobrir apenas alguns termos da
mesma. Vejamos um exemplo.
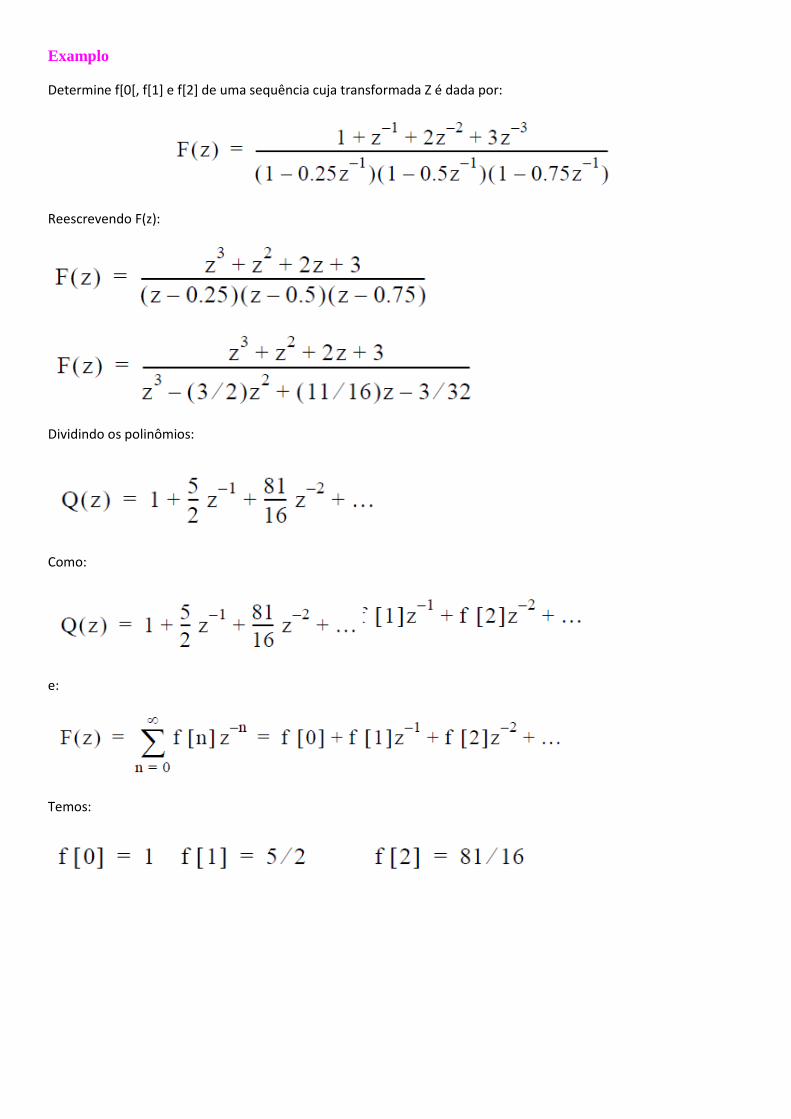
Examplo
Determine f[0[, f[1] e f[2] de uma sequência cuja transformada Z é dada por:
Reescrevendo F(z):
Dividindo os polinômios:
Como:
e:
Temos:
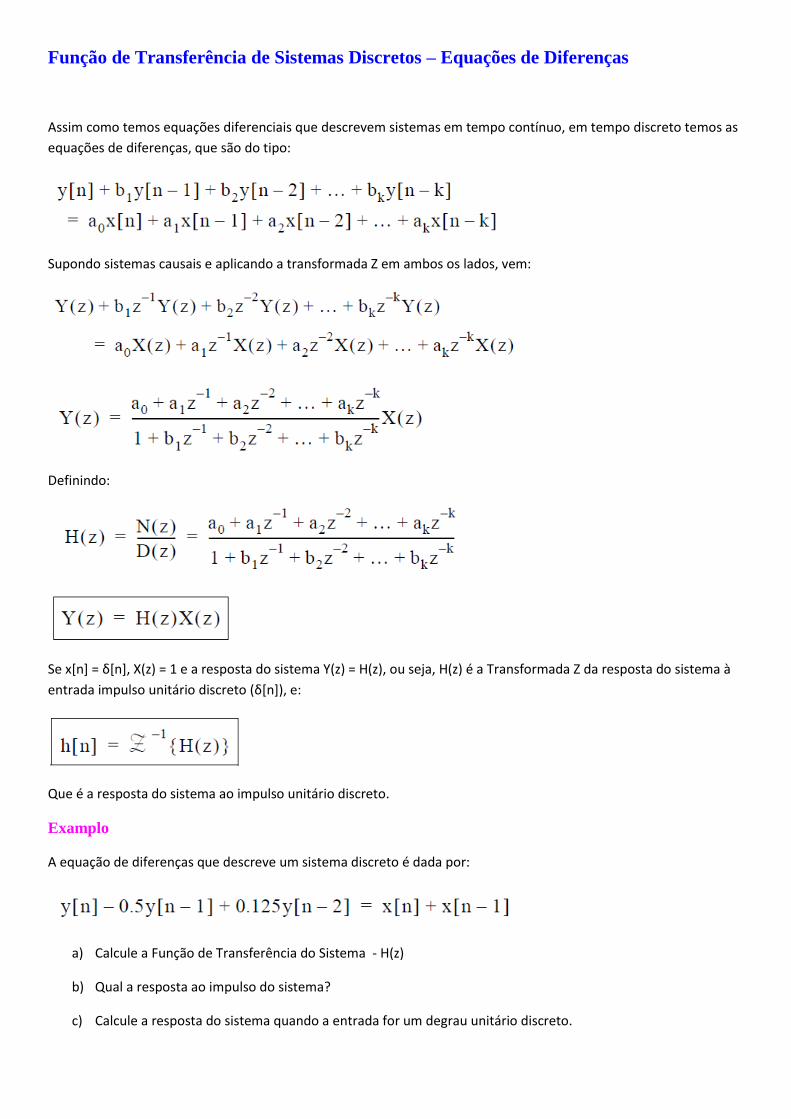
Função de Transferência de Sistemas Discretos – Equações de Diferenças
Assim como temos equações diferenciais que descrevem sistemas em tempo contínuo, em tempo discreto temos as
equações de diferenças, que são do tipo:
Supondo sistemas causais e aplicando a transformada Z em ambos os lados, vem:
Definindo:
Se x[n] = δ[n], X(z) = 1 e a resposta do sistema Y(z) = H(z), ou seja, H(z) é a Transformada Z da resposta do sistema à
entrada impulso unitário discreto (δ[n]), e:
Que é a resposta do sistema ao impulso unitário discreto.
Examplo
A equação de diferenças que descreve um sistema discreto é dada por:
a) Calcule a Função de Transferência do Sistema - H(z)
b) Qual a resposta ao impulso do sistema?
c) Calcule a resposta do sistema quando a entrada for um degrau unitário discreto.