tom and jerry - university of florida€¦ · ppt file · web view2007-04-17 · tom and jerry by:...
TRANSCRIPT

Tom and JerryBy: Nicholas Johnson & Joshua Hartman
EEL-5666 – Intelligent Machines Design Lab

EEL-5666: Intelligent Machines Design Lab
Overview
Overall Function Tom’s Design Jerry’s Design Special Sensor – RF Link Conclusions Possible Improvements Questions
EEL-5666: Intelligent Machines Design Lab
Overall Function
Jerry and Tom simulate a Predator / Prey Model.
Jerry is the prey and has prey behaviors such as wandering and grazing.
Tom is the predator and searches for Jerry. When Tom detects Jerry he will try to
capture Jerry who tries to run away.

EEL-5666: Intelligent Machines Design Lab
Tom
EEL-5666: Intelligent Machines Design Lab
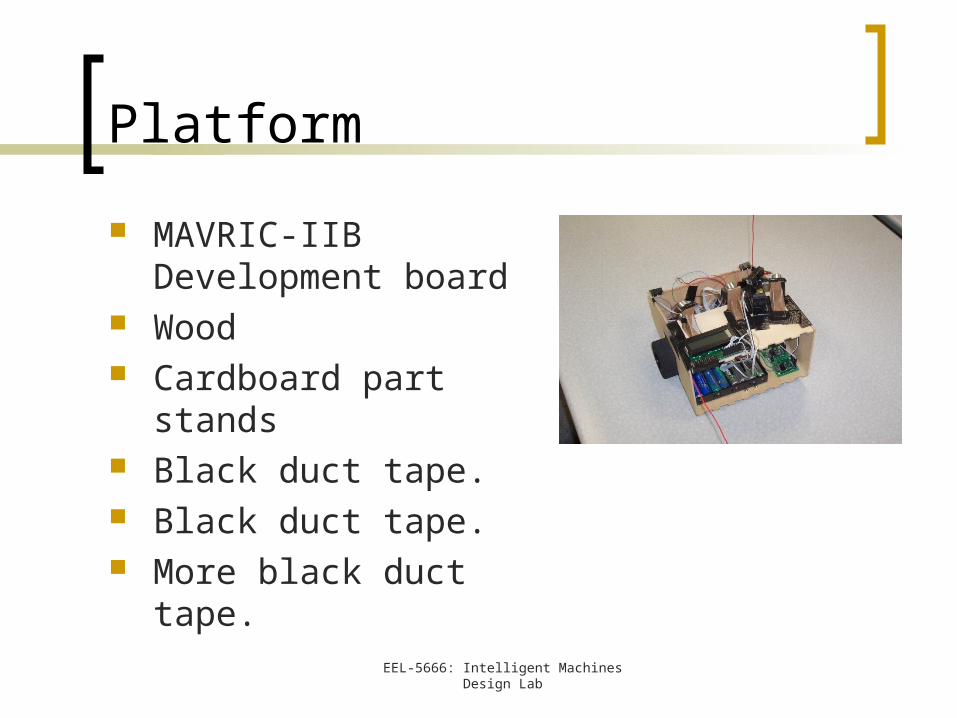
Platform
MAVRIC-IIB Development board
Wood Cardboard part stands Black duct tape. Black duct tape. More black duct tape.
EEL-5666: Intelligent Machines Design Lab
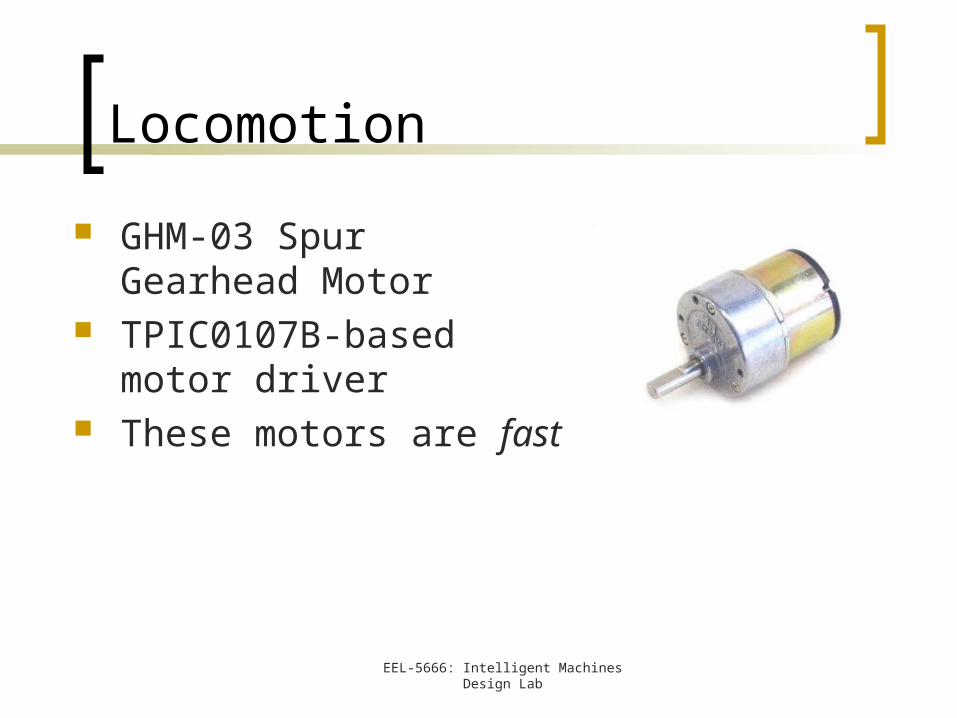
Locomotion
GHM-03 Spur Gearhead Motor
TPIC0107B-based motor driver
These motors are fast
EEL-5666: Intelligent Machines Design Lab
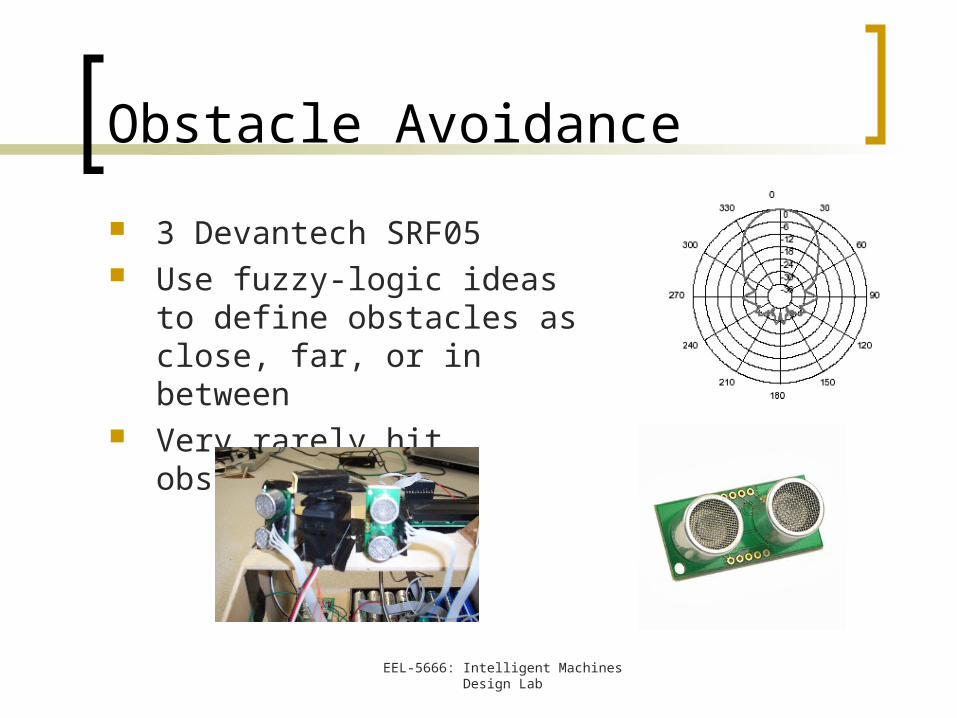
Obstacle Avoidance
3 Devantech SRF05 Use fuzzy-logic ideas to define
obstacles as close, far, or in between
Very rarely hit obstacles

EEL-5666: Intelligent Machines Design Lab
Searching for Jerry
Futaba S148 Panasonic PNA4611
Infrared Photo IC Servo rotates from -45o,
-22.5o, 0o, 22.5o, 45o
At each location, reads A/D and detects if value<200. If so, Jerry is detected!

EEL-5666: Intelligent Machines Design Lab
Searching for Jerry II
IR detection not so easy: Must use ADC to read photo IC output Vout goes low upon detection Must have receiver highly shielded to
give directional output
EEL-5666: Intelligent Machines Design Lab
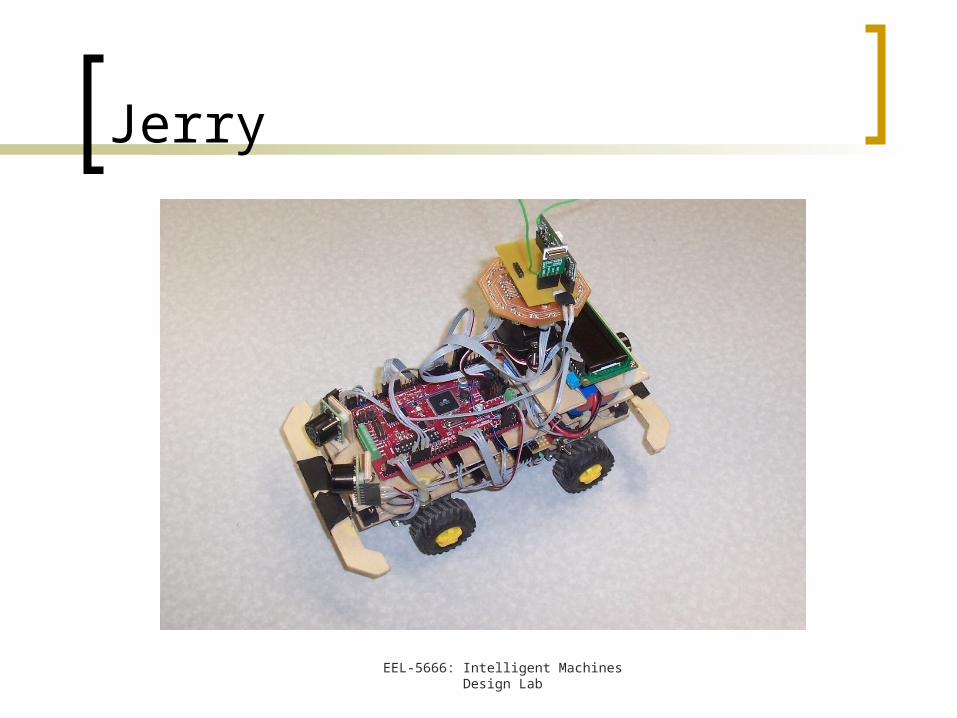
Jerry
EEL-5666: Intelligent Machines Design Lab
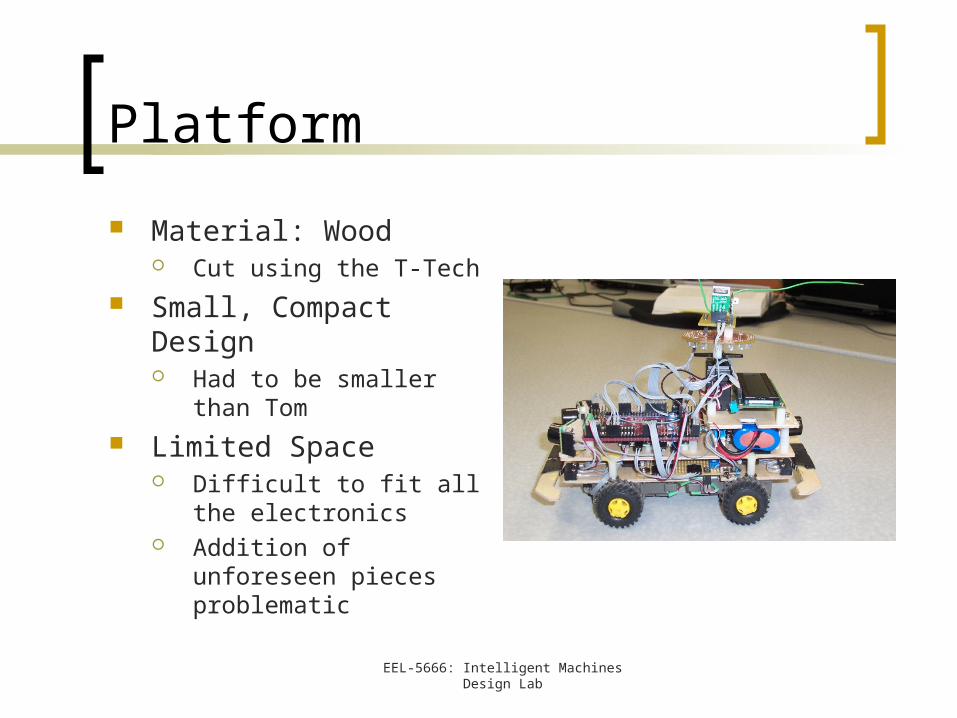
Platform
Material: Wood Cut using the T-Tech
Small, Compact Design Had to be smaller than
Tom Limited Space
Difficult to fit all the electronics
Addition of unforeseen pieces problematic
EEL-5666: Intelligent Machines Design Lab
Actuation
2 Tamiya 70168 Double Gearboxes 114.7:1 Gear Ratio 4 wheels total
Driven by TPIC0108B PWM H-Bridge Wheels on either side function
independently Each side driven by 1 Motor Driver
Servo Motor to turn “Tom Detector”
EEL-5666: Intelligent Machines Design Lab
Sensors
Bump Switches 2 Front, 2 Back
Maxbotix Ultrasonic Rangers 2 Front, 1 Back
IR Emitter / Detector (Close Range) 56.8 KHz IR Detector 315 MHz RF Receiver 434 MHz RF Transmitter
EEL-5666: Intelligent Machines Design Lab
Sonar
Provides analog interface The higher the voltage the further away the object.
Start time of each sonar can be controlled. Readings obtained 50ms after start. Sequentially check each sonar
If returned value below threshold then obstacle detected.

EEL-5666: Intelligent Machines Design Lab
Jerry’s Design – Close IR
Analog output Brighter areas give lower voltages. If returned value above threshold then obstacle
detected.
EEL-5666: Intelligent Machines Design Lab
Jerry’s Design - Behaviors
Wandering Randomly moves around avoiding
obstacles. If “food” (black spot) is detected it will
switch to grazing behavior. Frequently looks for Tom. If Tom is detected it will immediately
switch to running behavior.

EEL-5666: Intelligent Machines Design Lab
Jerry’s Design - Behaviors
Grazing Holds on top of food for a preset time. Will slowly move across the food until
passes it completely. Infrequently looks for Tom. If Tom is detected it will switch to running
behavior.
EEL-5666: Intelligent Machines Design Lab
Jerry’s Design - Behaviors
Running Moves away from Tom as fast as
possible. Turns frequently in order to escape Tom. If caught, will stop and wait to be reset. If preset time has gone without being
caught will return to wandering behavior.

EEL-5666: Intelligent Machines Design Lab
Special Sensor - RF Link
www.sparkfun.com Tom:
434MHz Receiver 315MHz Transmitter
Jerry: 315MHz Receiver 434MHz Transmitter
Links used to communicate robot status to determine exhibited behaviors.
EEL-5666: Intelligent Machines Design Lab
RF Link Difficulties Receiver designed to “lock on” to signal. Therefore,
sender must transmit alternating bits for receiver to lock onto the baud rate.
Receiver will increase gain until it finds a detectable signal. Therefore, it will output garbage if the transmitter is not sending.
EEL-5666: Intelligent Machines Design Lab
RF Link difficulties
Receiver must “synchronize” with transmitter. If a transmission looks like: 0 0 0 1 0 1 1 0 1 0 1 0…, the USART has no real way to recognize the start of a transmission. Over a wired link, the line is usually high and is pulled low using the start bit. This is not the case in RF.
Finally, the receiver has a band-pass filter centered at its tuned frequency. When the robots get far enough away, this is washed out by the local transmitter.
EEL-5666: Intelligent Machines Design Lab
RF Link Algorithm
Use interrupts to continually send 0xAA, the locking code.
When want to transmit, send out 0xFF to resynchronize the link
Finally, send out data.

EEL-5666: Intelligent Machines Design Lab
Conclusions
Both robots successfully avoid obstacles.
Wireless successfully incorporated. Tom successfully detects Jerry and will
head towards him.
EEL-5666: Intelligent Machines Design Lab
Possible Improvements
More reliable detection method. IR not always reliable and dependent on
environment.
EEL-5666: Intelligent Machines Design Lab
Questions?
Acknowledgements Dr. A. A. Arroyo Dr. E. M. Schwartz Julio Suarez Adam Barnett Thomas McDonley Jason Taylor