theory of stereo vision system introduction · theory of stereo vision system introduction stereo...
TRANSCRIPT
Theory of Stereo vision system
Introduction
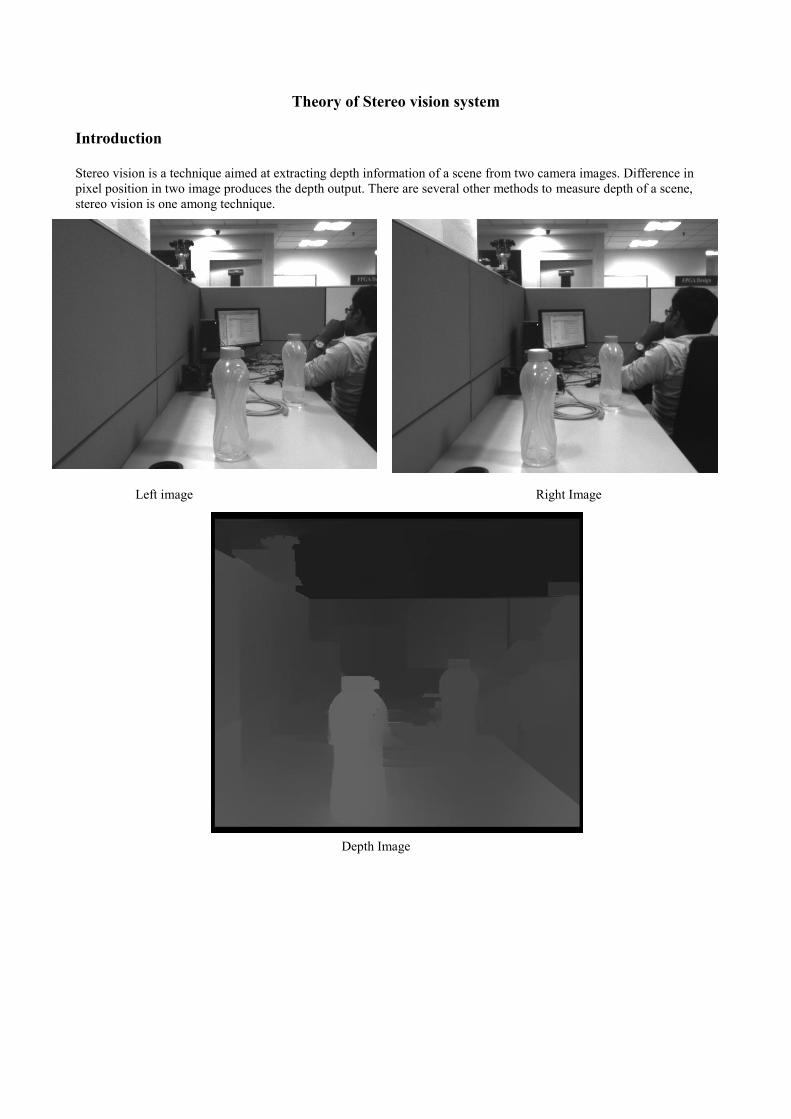
Stereo vision is a technique aimed at extracting depth information of a scene from two camera images. Difference in
pixel position in two image produces the depth output. There are several other methods to measure depth of a scene,
stereo vision is one among technique.
Left image Right Image
Depth Image
Intended Audience
The document is intended for audience to help in understanding the concept of stereo vision system and estimating
depth range of a system theoretically.
Theory
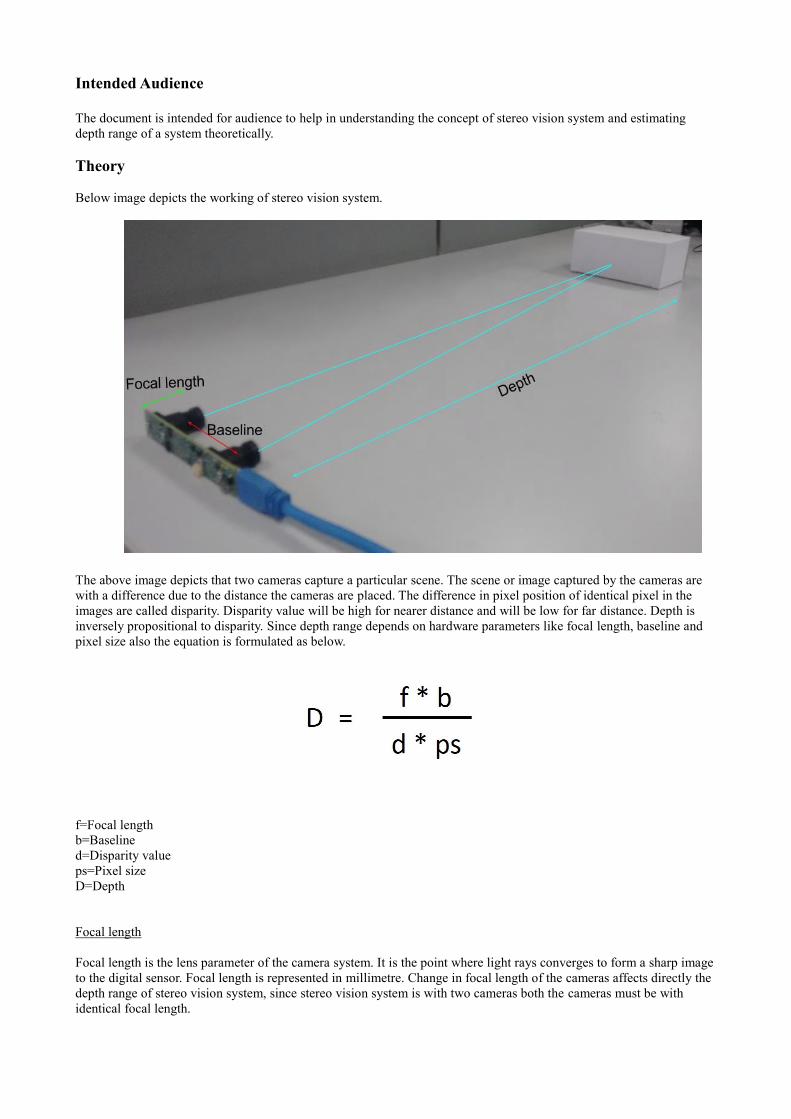
Below image depicts the working of stereo vision system.
The above image depicts that two cameras capture a particular scene. The scene or image captured by the cameras are
with a difference due to the distance the cameras are placed. The difference in pixel position of identical pixel in the
images are called disparity. Disparity value will be high for nearer distance and will be low for far distance. Depth is
inversely propositional to disparity. Since depth range depends on hardware parameters like focal length, baseline and
pixel size also the equation is formulated as below.
f=Focal length
b=Baseline
d=Disparity value
ps=Pixel size
D=Depth
Focal length
Focal length is the lens parameter of the camera system. It is the point where light rays converges to form a sharp image
to the digital sensor. Focal length is represented in millimetre. Change in focal length of the cameras affects directly the
depth range of stereo vision system, since stereo vision system is with two cameras both the cameras must be with
identical focal length.
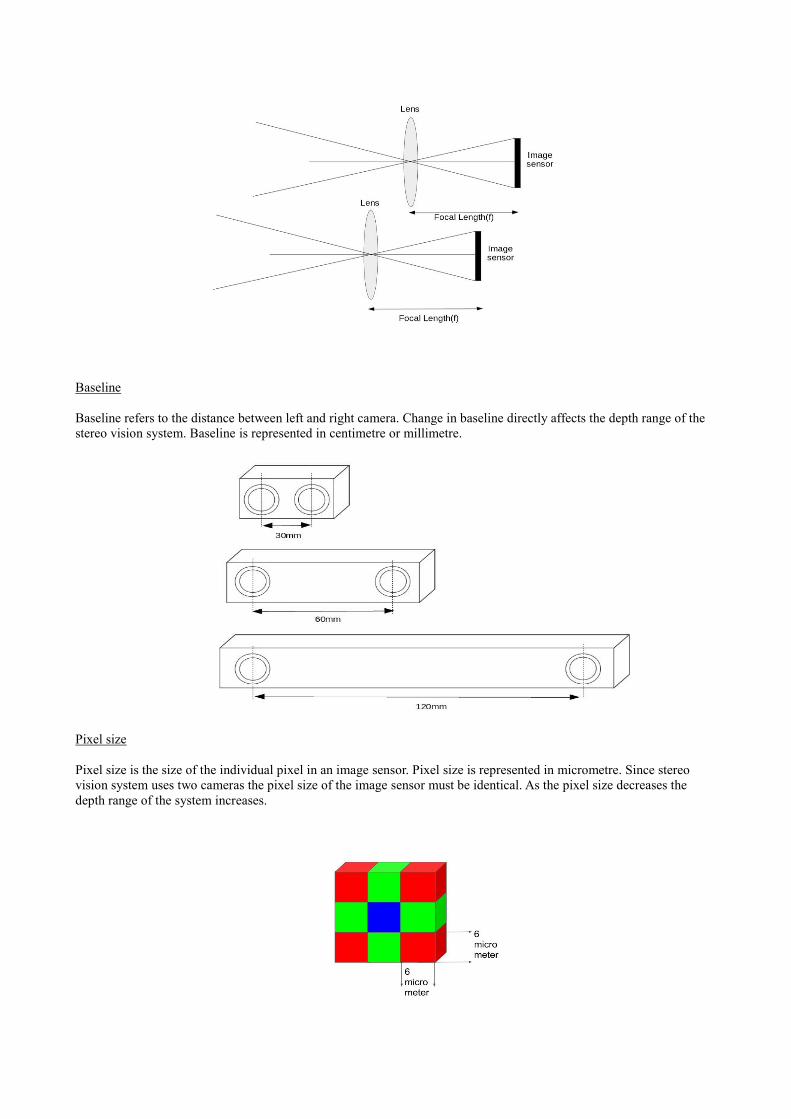
Baseline
Baseline refers to the distance between left and right camera. Change in baseline directly affects the depth range of the
stereo vision system. Baseline is represented in centimetre or millimetre.
Pixel size
Pixel size is the size of the individual pixel in an image sensor. Pixel size is represented in micrometre. Since stereo
vision system uses two cameras the pixel size of the image sensor must be identical. As the pixel size decreases the
depth range of the system increases.
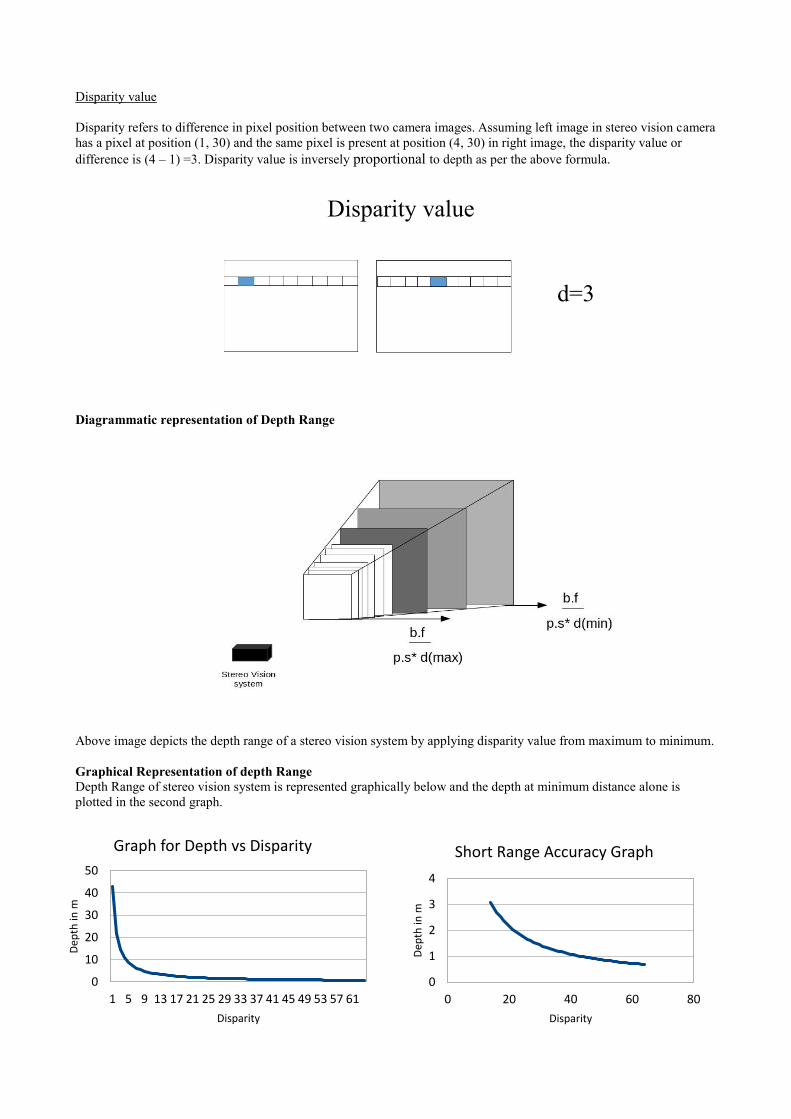
Disparity value
Disparity refers to difference in pixel position between two camera images. Assuming left image in stereo vision camera
has a pixel at position (1, 30) and the same pixel is present at position (4, 30) in right image, the disparity value or
difference is (4 – 1) =3. Disparity value is inversely proportional to depth as per the above formula.
Diagrammatic representation of Depth Range
Above image depicts the depth range of a stereo vision system by applying disparity value from maximum to minimum.
Graphical Representation of depth Range
Depth Range of stereo vision system is represented graphically below and the depth at minimum distance alone is
plotted in the second graph.
Disparity value
d=3
1 5 9 13 17 21 25 29 33 37 41 45 49 53 57 61
0
10
20
30
40
50
Disparity
Dep
th in
m
Graph for Depth vs Disparity
0 20 40 60 80
0
1
2
3
4
Disparity
Dep
th in
m
Short Range Accuracy Graph
Short range in graph or disparity plane at minimum distance are the range where the depth is more accurate in stereo
vision system. Disparity value is plotted in x axis and depth is plotted in y axis.
Manual disparity calculation from stereo image pair
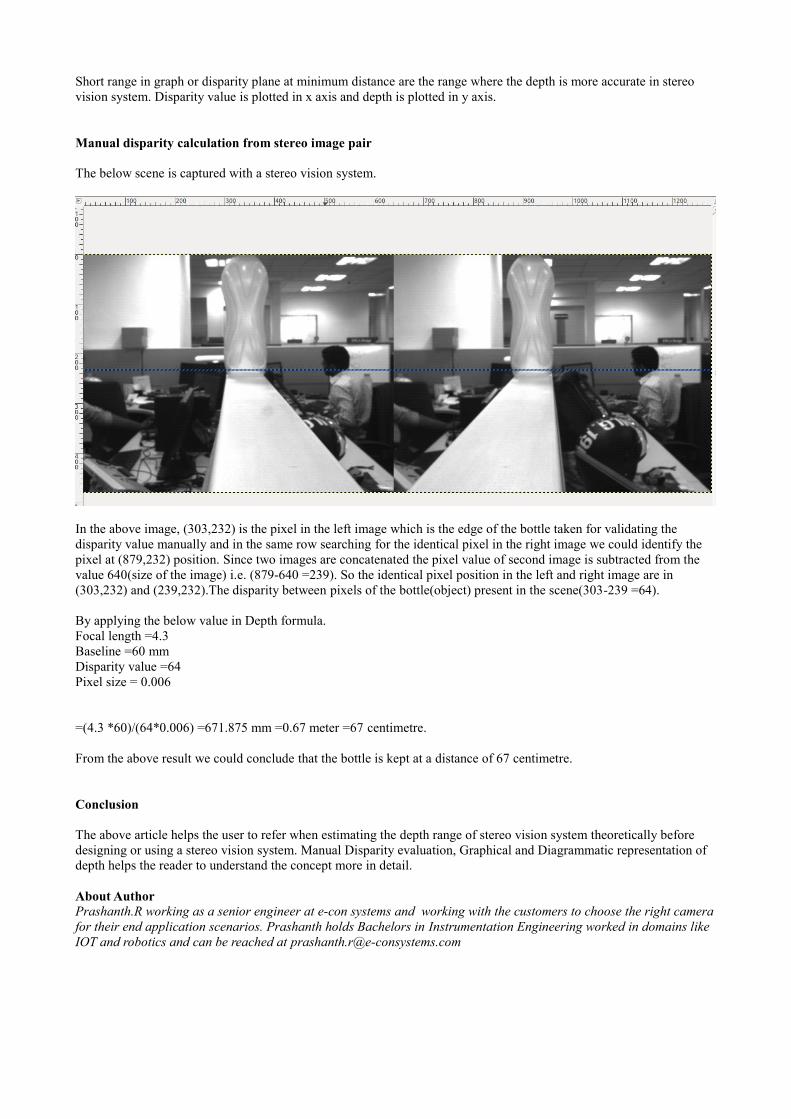
The below scene is captured with a stereo vision system.
In the above image, (303,232) is the pixel in the left image which is the edge of the bottle taken for validating the
disparity value manually and in the same row searching for the identical pixel in the right image we could identify the
pixel at (879,232) position. Since two images are concatenated the pixel value of second image is subtracted from the
value 640(size of the image) i.e. (879-640 =239). So the identical pixel position in the left and right image are in
(303,232) and (239,232).The disparity between pixels of the bottle(object) present in the scene(303-239 =64).
By applying the below value in Depth formula.
Focal length =4.3
Baseline =60 mm
Disparity value =64
Pixel size = 0.006
=(4.3 *60)/(64*0.006) =671.875 mm =0.67 meter =67 centimetre.
From the above result we could conclude that the bottle is kept at a distance of 67 centimetre.
Conclusion
The above article helps the user to refer when estimating the depth range of stereo vision system theoretically before
designing or using a stereo vision system. Manual Disparity evaluation, Graphical and Diagrammatic representation of
depth helps the reader to understand the concept more in detail.
About Author
Prashanth.R working as a senior engineer at e-con systems and working with the customers to choose the right camera
for their end application scenarios. Prashanth holds Bachelors in Instrumentation Engineering worked in domains like
IOT and robotics and can be reached at [email protected]