the navigation mobile robot systems using bayesian...
TRANSCRIPT

Luige VLADAREANU, Gabriela TONT, Victor VLADAREANU, Florentin SMARANDACHE and Lucian CAPITANU
1
The Navigation Mobile Robot Systems Using Bayesian Approach through the
Virtual Projection Method
ICAMechS 2012Advanced Intelligent Control
in Robotics and Mechatronics
Tokyo, Japan, September 2012
Improvement of Dynamical Stability for the Real Time Walking Robot Control PERO
1. Introduction2. Dynamic Stability Control3. Simultaneous Localization and Maping4. A Petri Net and Markov Chains Approach5. Robot simulation through Petri Nets6. Virtual projection architecture for robot
experimental control7. Results and Conclusions
2Tokyo, Japan, September 2012 ICAMechS 2012

3
• The approach of the localizationand navigation problems of amobile robot which uses a WSNwhich comprises of a large numberof distributed nodes with camerasas main sensorHybrid force‐position controlthrough operational space methodThe Zero Movement Point (ZMP)method by processing inertialinformation of force torque andtilting and by implementingintelligent high level algorithms
1. IntroductionThe Navigation and Stability of the Mobile Robot Systems
Tokyo, Japan, September 2012 ICAMechS 2012
4
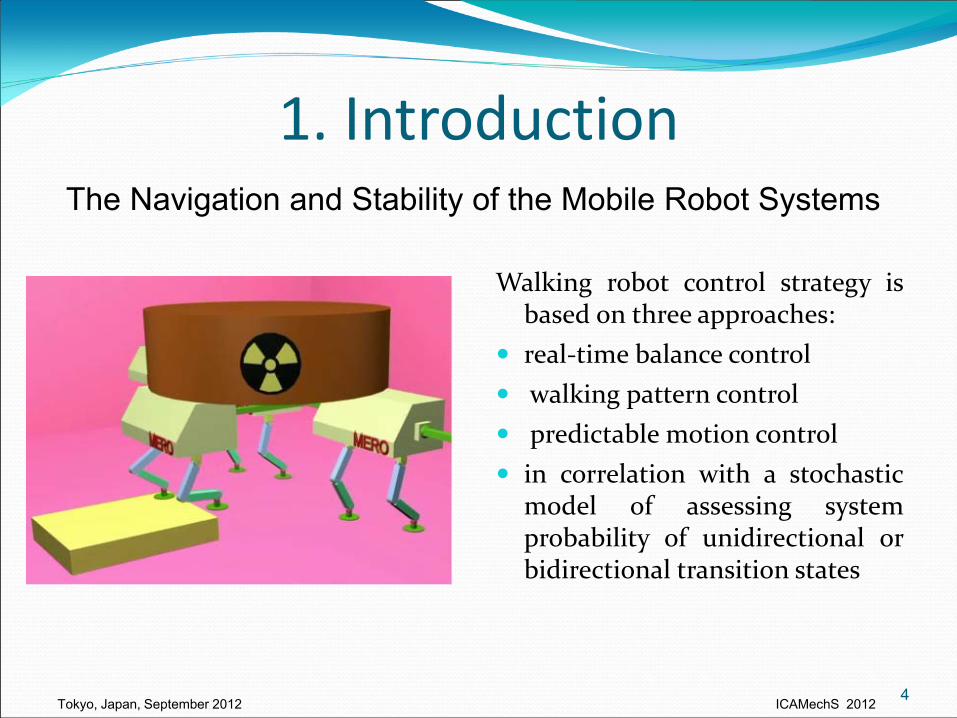
Walking robot control strategy isbased on three approaches:real‐time balance controlwalking pattern controlpredictable motion controlin correlation with a stochasticmodel of assessing systemprobability of unidirectional orbidirectional transition states
1. IntroductionThe Navigation and Stability of the Mobile Robot Systems
Tokyo, Japan, September 2012 ICAMechS 2012

5
the system architecture controlwas completed for HFPC walkingrobots (hybrid force‐positioncontrol) with two other controlfunctionsOnline controllers were designedfor the objectives of the controlschemes and planned in the earlystages of walking.Was obtained the walking controlalgorithm with online simulationsobtained experimentally throughthe virtual projection method.
1. IntroductionThe Navigation and Stability of the Mobile Robot Systems
Tokyo, Japan, September 2012 ICAMechS 2012

6
2. Dynamic Stability ControlD
ynam
ic c
ontr
ol o
f the
wal
king
ro
bots
mot
ion
Tokyo, Japan, September 2012 ICAMechS 2012
7
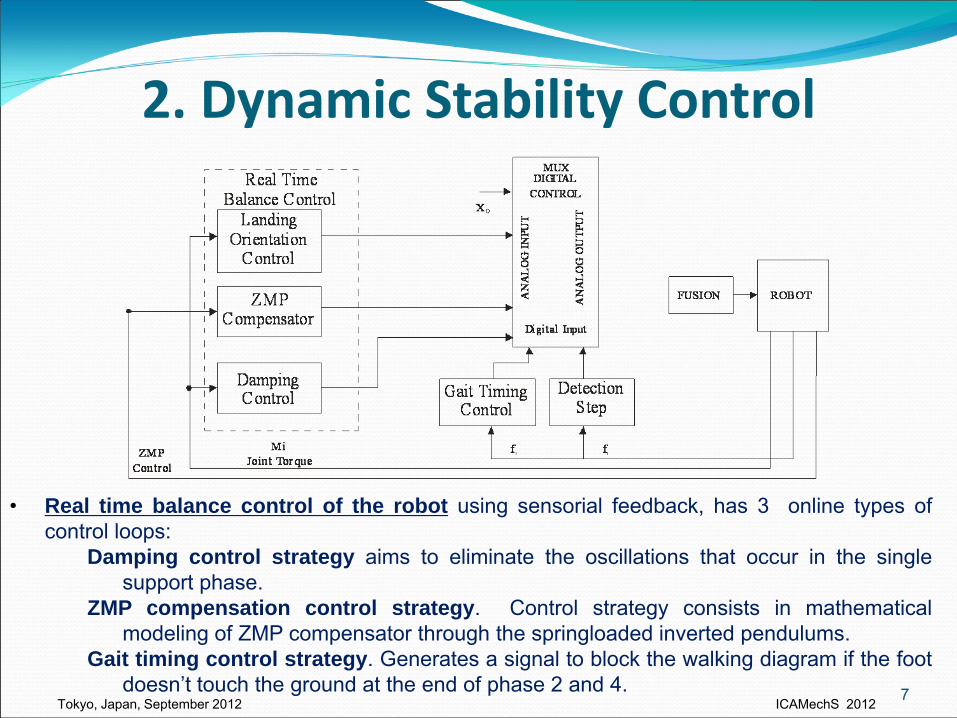
• Real time balance control of the robot using sensorial feedback, has 3 online types ofcontrol loops:
Damping control strategy aims to eliminate the oscillations that occur in the singlesupport phase.
ZMP compensation control strategy. Control strategy consists in mathematicalmodeling of ZMP compensator through the springloaded inverted pendulums.
Gait timing control strategy. Generates a signal to block the walking diagram if the footdoesn’t touch the ground at the end of phase 2 and 4.
2. Dynamic Stability Control
Tokyo, Japan, September 2012 ICAMechS 2012
8
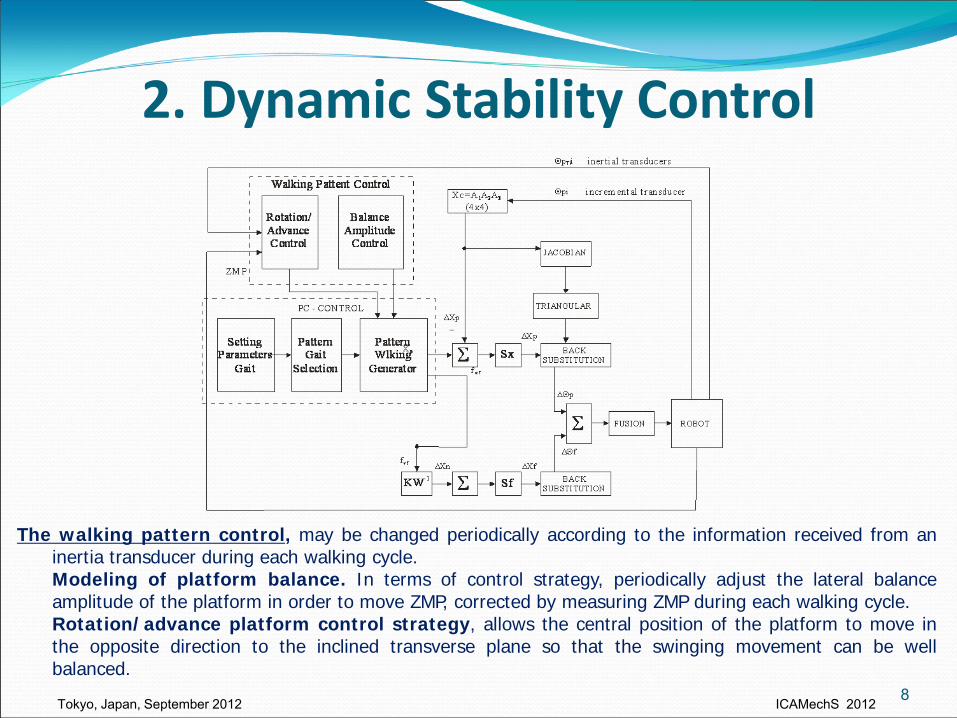
The walking pattern control, may be changed periodically according to the information received from aninertia transducer during each walking cycle.
• Modeling of platform balance. In terms of control strategy, periodically adjust the lateral balanceamplitude of the platform in order to move ZMP, corrected by measuring ZMP during each walking cycle.
• Rotation/advance platform control strategy, allows the central position of the platform to move inthe opposite direction to the inclined transverse plane so that the swinging movement can be wellbalanced.
2. Dynamic Stability Control
Tokyo, Japan, September 2012 ICAMechS 2012

9
Predictable motion control.Is based on generating probable robot movements achieved by processing earlier movements,in order to avoid overthrowing the walking robot.Control of landing position, is for to compensate foot landing position on ground, in order towalk towards the direction of the fall, by a twisting movement of the platform.Control of tilt over the side of safety of the robot. The tilt control loop prevents the fall ofthe walking robot in lateral directions, in case of moving on a bumpy field or external forces.
2. Dynamic Stability Control
Tokyo, Japan, September 2012 ICAMechS 2012
10
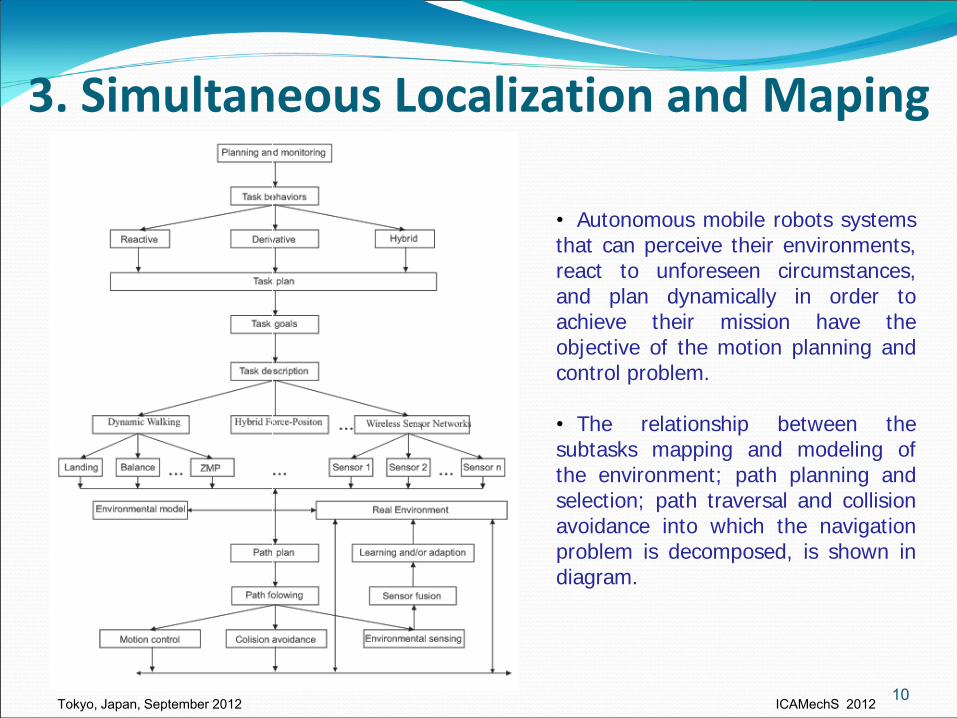
3. Simultaneous Localization and Maping
• Autonomous mobile robots systemsthat can perceive their environments,react to unforeseen circumstances,and plan dynamically in order toachieve their mission have theobjective of the motion planning andcontrol problem.
• The relationship between thesubtasks mapping and modeling ofthe environment; path planning andselection; path traversal and collisionavoidance into which the navigationproblem is decomposed, is shown indiagram.
Tokyo, Japan, September 2012 ICAMechS 2012

11
3. Simultaneous Localization and Maping
• Motion planning of mobile walkingrobots in uncertain dynamicenvironments based on the behaviordynamics of collision-avoidance istransformed into an optimizationproblem. Applying constraints basedon control of the behavior dynamics,the decision-making space of thisoptimization.• In this sense, a new controlalgorithm has been studied andanalyzed for dynamic walking ofrobots based on sensory tools such asforce / torque and inertial sensors.Distributed control systemarchitecture was integrated into theHFPC architecture so that it can becontrolled with high efficiency andhigh performance.
Tokyo, Japan, September 2012 ICAMechS 2012
Petri NetsThe interest in modeling by means of PN came from the
following reasons:⇒ More detailed causal modeling considering the two main
aspects;
⇒ information flow within the system takes the form ofprocess and task and control sequences, may satisfythe Markovian property [10, 17];
⇒ allow to build dynamic models which incorporate timeinformation of the process development ;
⇒ sequencing and planning actions can be checked andmonitored throughout system states that can be relatedto insecurity conditions.
4. A Petri Net and Markov Chains Approach
Tokyo, Japan, September 2012 ICAMechS 2012
Petri Nets
Petri nets share many common propertieswith other formalisms. Petri nets cannormally be converted to time Petri nets forsimulation and performance modeling.■ Petri nets have a dual identity. They canbe represented graphically and nongraphically;■ Compared with other formalisms Petrinets are preferable for visualization andcomprehension by different stakeholders.
4. A Petri Net and Markov Chains Approach
Tokyo, Japan, September 2012 ICAMechS 2012
Petri Nets
Petri nets have been used to model:
i) hardware;
ii) software systems;
iii) communication systems;
iv) manufacturing
v) software modeling.
4. A Petri Net and Markov Chains Approach
Tokyo, Japan, September 2012 ICAMechS 2012
Petri Nets
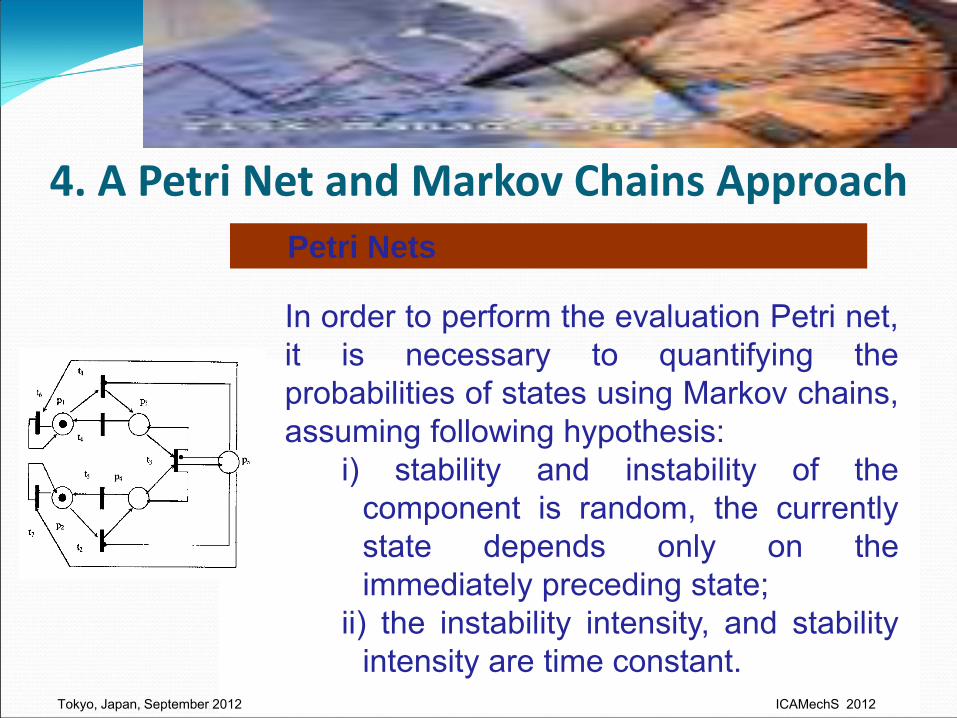
In order to perform the evaluation Petri net,it is necessary to quantifying theprobabilities of states using Markov chains,assuming following hypothesis:
i) stability and instability of thecomponent is random, the currentlystate depends only on theimmediately preceding state;
ii) the instability intensity, and stabilityintensity are time constant.
4. A Petri Net and Markov Chains Approach
Tokyo, Japan, September 2012 ICAMechS 2012

Petri Nets
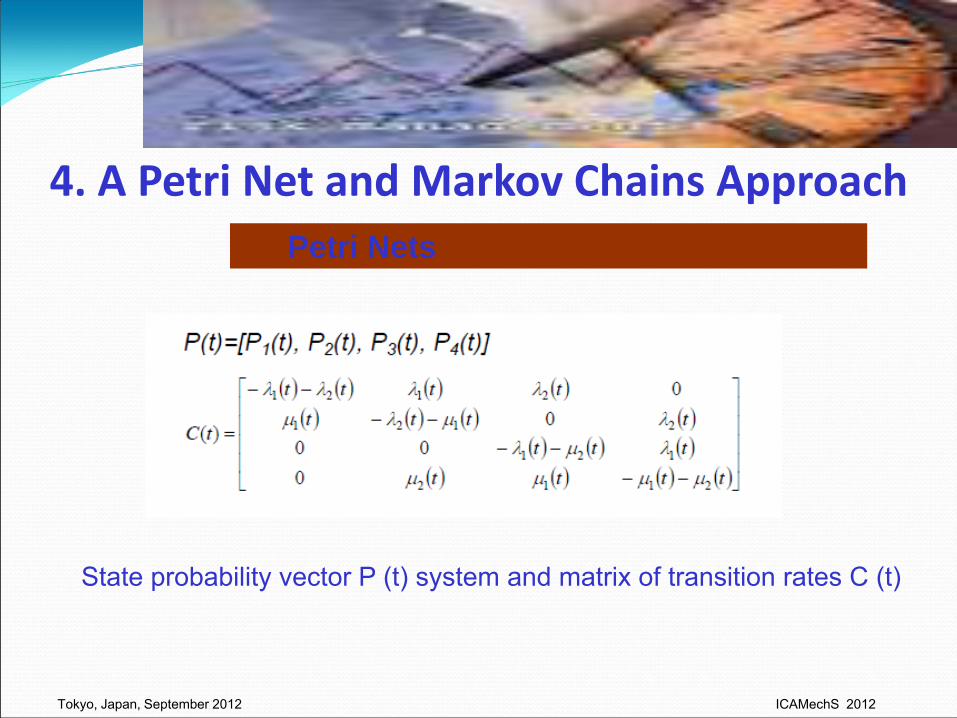
Assimilating development over time of system through thevarious states that may occur as a result of fail and restoreof elements with a continuous time Markov process,solving is done by the system of differential equations,written under generalized form as the matrix
4. A Petri Net and Markov Chains Approach
Tokyo, Japan, September 2012 ICAMechS 2012

Petri Nets
4. A Petri Net and Markov Chains Approach
Modeling the states with possible transitions for robotTokyo, Japan, September 2012 ICAMechS 2012

Petri Nets
4. A Petri Net and Markov Chains Approach
System Petri Net RepresentationTokyo, Japan, September 2012 ICAMechS 2012
Petri Nets
4. A Petri Net and Markov Chains Approach
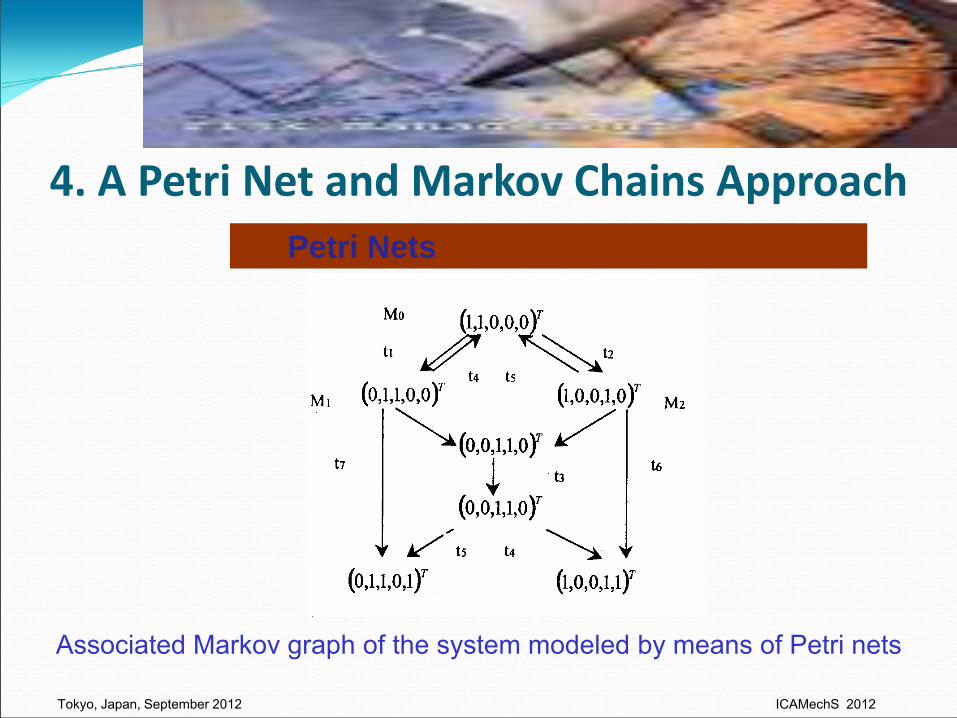
Associated Markov graph of the system modeled by means of Petri nets
Tokyo, Japan, September 2012 ICAMechS 2012
Petri Nets
4. A Petri Net and Markov Chains Approach
State probability vector P (t) system and matrix of transition rates C (t)
Tokyo, Japan, September 2012 ICAMechS 2012
Petri Nets
4. A Petri Net and Markov Chains Approach
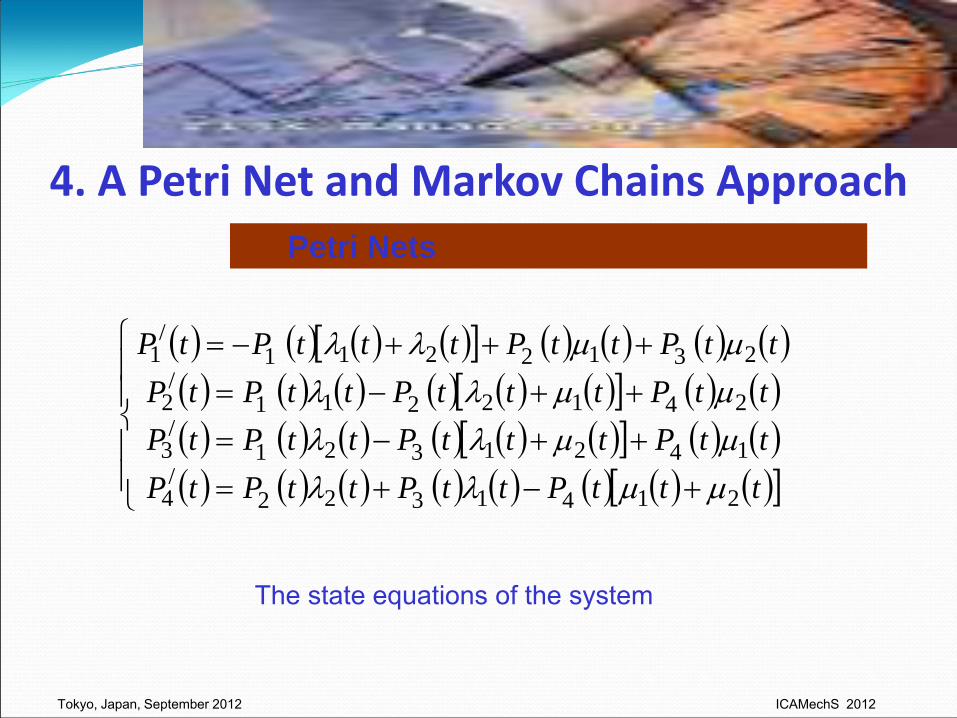
The state equations of the system
( ) ( ) ( ) ( )[ ] ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( )[ ] ( ) ( )( ) ( ) ( ) ( ) ( ) ( )[ ] ( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )[ ]⎪
⎪
⎩
⎪⎪
⎨
⎧
+−+=++−=++−=+++−=
tttPttPttPtPttPtttPttPtPttPtttPttPtPttPttPtttPtP
2141322/
4
1421321/
3
2412211/
2
2312211/
1
μμλλμμλλμμλλμμλλ
Tokyo, Japan, September 2012 ICAMechS 2012

Petri Nets
4. A Petri Net and Markov Chains Approach
The functionality functions Fu (t) and instantaneous availability A (t) vectors
Tokyo, Japan, September 2012 ICAMechS 2012

23
In order to verify the force‐positiondynamic control performance ofwalking robots, in addition tointegrating the dynamic control loopsthrough the ZMP method, the virtualprojection system architecture allowsnew control functionssimultaneous localization andmapping (SLAM) interfacestructural vibration control functionsof the operating mechanism interfacecooperation functions for obstaclesavoidance interfece
5. Virtual Projection Architecture
Tokyo, Japan, September 2012 ICAMechS 2012

24
The virtual projection method realizes the dynamic force‐position controlperformance testing by integrating the fuzzy multi‐stage method withresolved acceleration in controlling the dynamic force‐position controlloops through ZMP method and another two control loops.Method is patented by the authors
5. Virtual Projection Architecture
Tokyo, Japan, September 2012 ICAMechS 2012

25
•A
num
ber
ofn
func
tions
ofth
eco
ntro
lin
terfa
ces
ICF1
-ICFn
ensu
reth
ede
velo
pmen
tof
open
arch
itect
ure
cont
rol
syst
emby
inte
grat
ing
anu
mbe
rof
nco
ntro
lfu
nctio
ns
5. Virtual Projection Architecture
• Additional functions provided by the mechatronic control : trajectorytracking, walking control scheme for tripod robots, center of gravitycontrol, and orientation control by image processing
Tokyo, Japan, September 2012 ICAMechS 2012
26
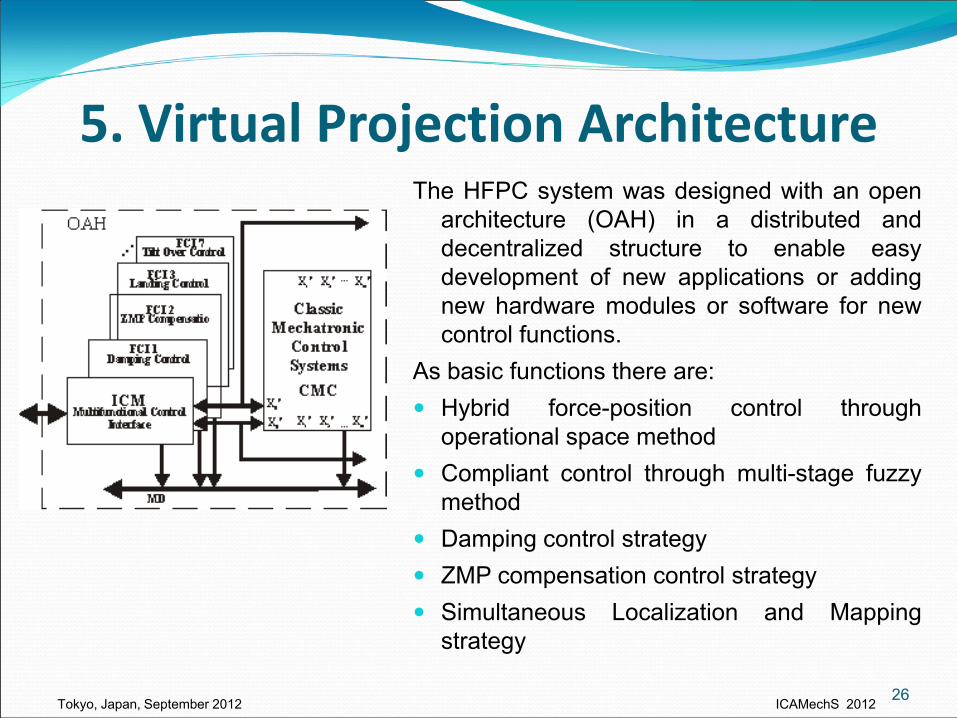
The HFPC system was designed with an openarchitecture (OAH) in a distributed anddecentralized structure to enable easydevelopment of new applications or addingnew hardware modules or software for newcontrol functions.
As basic functions there are:Hybrid force-position control throughoperational space methodCompliant control through multi-stage fuzzymethodDamping control strategyZMP compensation control strategySimultaneous Localization and Mappingstrategy
5. Virtual Projection Architecture
Tokyo, Japan, September 2012 ICAMechS 2012
27
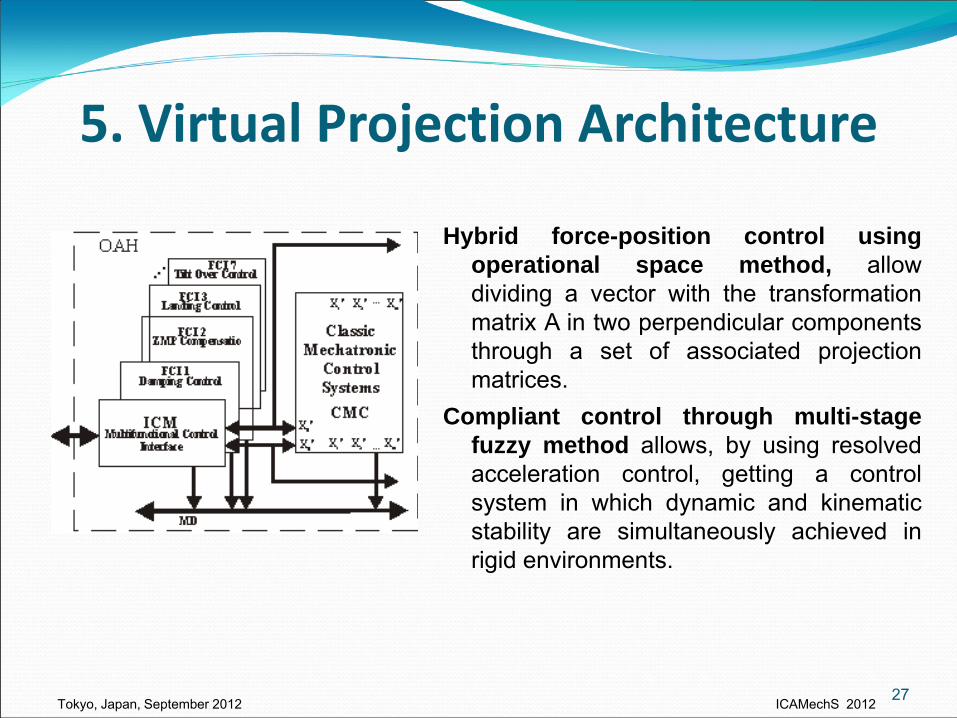
Hybrid force-position control usingoperational space method, allowdividing a vector with the transformationmatrix A in two perpendicular componentsthrough a set of associated projectionmatrices.
Compliant control through multi-stagefuzzy method allows, by using resolvedacceleration control, getting a controlsystem in which dynamic and kinematicstability are simultaneously achieved inrigid environments.
5. Virtual Projection Architecture
Tokyo, Japan, September 2012 ICAMechS 2012
28
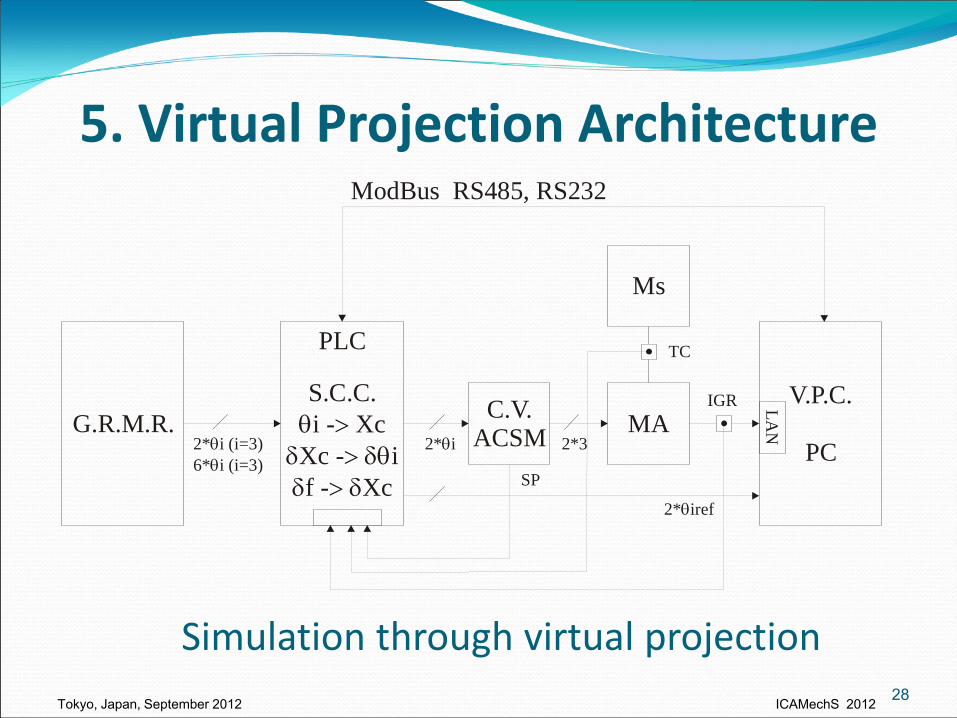
Simulation through virtual projection
G.R.M.R.
PLC
S.C.C.i - Xc
Xc - θ >δ > δθi
f - Xcδ > δ
C.V.ACSM MA
Ms
V.P.C.
PC
LAN
ModBus RS485, RS232
2* i (i=3)6* i (i=3)θθ
2* iθ 2*3
IGR
TC
2* irefθ
SP
5. Virtual Projection Architecture
Tokyo, Japan, September 2012 ICAMechS 2012
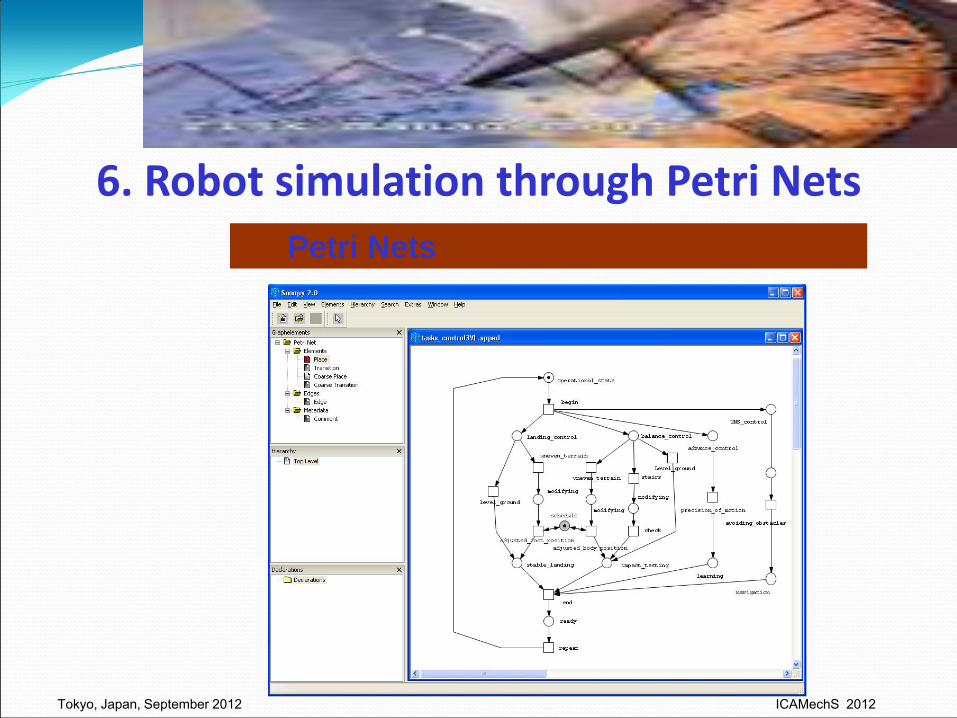
Petri Nets
6. Robot simulation through Petri Nets
Tokyo, Japan, September 2012 ICAMechS 2012
Petri Nets
6. Robot simulation through Petri Nets
Tokyo, Japan, September 2012 ICAMechS 2012

31
View from
the righ
t side camera
mov
emen
t
7. Results and Conclusion• Petri nets provide a promisingsolution towards the developmentquantitative approach of dynamicdiscreet / stochastic event systemsof task planning for mobile robots .
For a deeper insight into controland communication governing taskassignment of the robot, the entirediscrete-event dynamic evolution oftask sequential process have to belinguistically described in terms ofrepresentations.
• A comprehensive inference framework is required in analyzing thedatabase of rules of expert systems, Petri nets using a large amount ofdetails for building analysis, even for small systems, which lead to highcosts.Tokyo, Japan, September 2012 ICAMechS 2012

32
7. Results and ConclusionResults and conclusions.
• The research evidences thatstable gaits can be achieved byemploying simple controlapproaches which take advantageof the dynamics of compliant legs.• The compliant control systemarchitecture was completed withtracking functions for HFPCwalking robots through theimplementation of many controlloops in different phase of thewalking robot, led to adapt therobot walking on sloping land,with obstacles and bumps.
Tokyo, Japan, September 2012 ICAMechS 2012
33
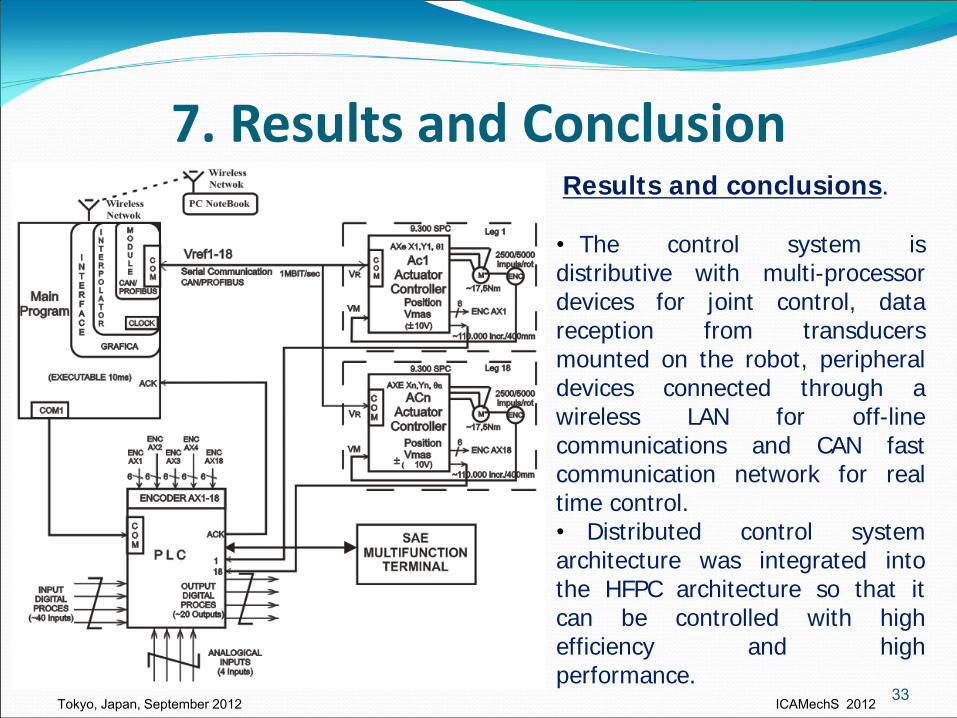
7. Results and ConclusionResults and conclusions.
• The control system isdistributive with multi-processordevices for joint control, datareception from transducersmounted on the robot, peripheraldevices connected through awireless LAN for off-linecommunications and CAN fastcommunication network for realtime control.• Distributed control systemarchitecture was integrated intothe HFPC architecture so that itcan be controlled with highefficiency and highperformance.
Tokyo, Japan, September 2012 ICAMechS 2012
34
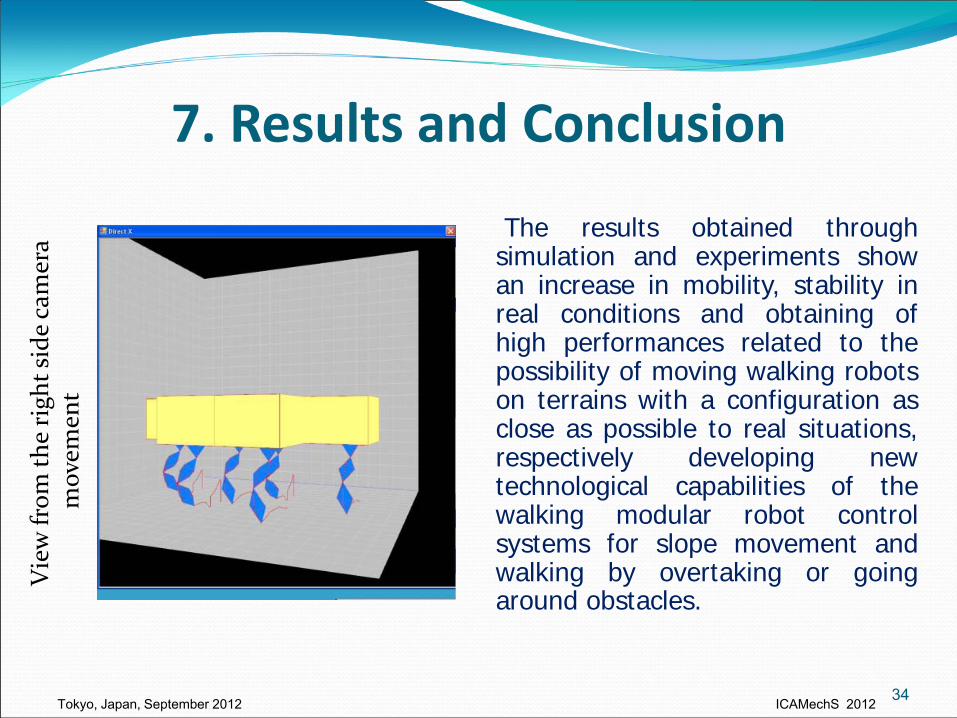
View from
the righ
t side camera
mov
emen
t
7. Results and Conclusion
The results obtained throughsimulation and experiments showan increase in mobility, stability inreal conditions and obtaining ofhigh performances related to thepossibility of moving walking robotson terrains with a configuration asclose as possible to real situations,respectively developing newtechnological capabilities of thewalking modular robot controlsystems for slope movement andwalking by overtaking or goingaround obstacles.
Tokyo, Japan, September 2012 ICAMechS 2012
HFPC Walking Robots
ICAMechS 2012TOKYO,JAPAN,
2012
Acknowledgements. The authors wish toexpress their gratitude to the Research andEducational Ministry (MEC) and to the RomanianAcademy for their support of the program ofwork reported herein. The work took place aspart of research project no. 263/2007-2010 in theframework of Grants of CNCSIS Program IDEAS,PN II (National Program for Scientific Researchand Innovation Technologies).

36
Advanced Intelligent Control in Robotics and MechatronicsTokyo, Japan, September 2012
ICAMechS 2012
Thank you for
your attention
Luige VLADAREANU, Gabriela TONT, Victor VLADAREANU, FlorentinSMARANDACHE and Lucian CAPITANU