t8 mecanismos
TRANSCRIPT
1
Maquinas y MecanismosTema 8
Manuel Quinto MedranoIES Infanta ElenaJumilla
Índice
� Introducción� Maquinas
– Simples– Compuestas
� Operadores Mecánicos� Tipos de Movimiento� Mecanismo� Mecanismos para Transmitir y Transformar
Movimientos
2
Introducción
� Necesidad de realizar trabajos que sobrepasaban nuestra capacidad física
� Para solucionar estos grandes retos se inventaron las máquinas
� Casi cualquier objeto puede convertirse en una máquina sin más que darle la utilidad adecuada.
Máquinas
� Maquinas: inventos humanos cuyo fin es reducir el esfuerzo necesario para realizar un trabajo.
� Tipos de Máquinas:– Simples: realizan el trabajo en un solo paso.
Ejemplo: cuchillo, alicates, palanca.– Compuestas: necesitan más de un paso para
realizar el trabajo. Ejemplo: motor, impresora.
3
Operadores Mecánicos
� Operador mecánico: cada una de las piezas fundamentales que componen una máquina.
� Ejemplos: – Rueda– Palanca– Plano Inclinado
Rueda
� Es un operador formado por un cuerpo redondo que gira alrededor de un punto fijo denominado eje.
4
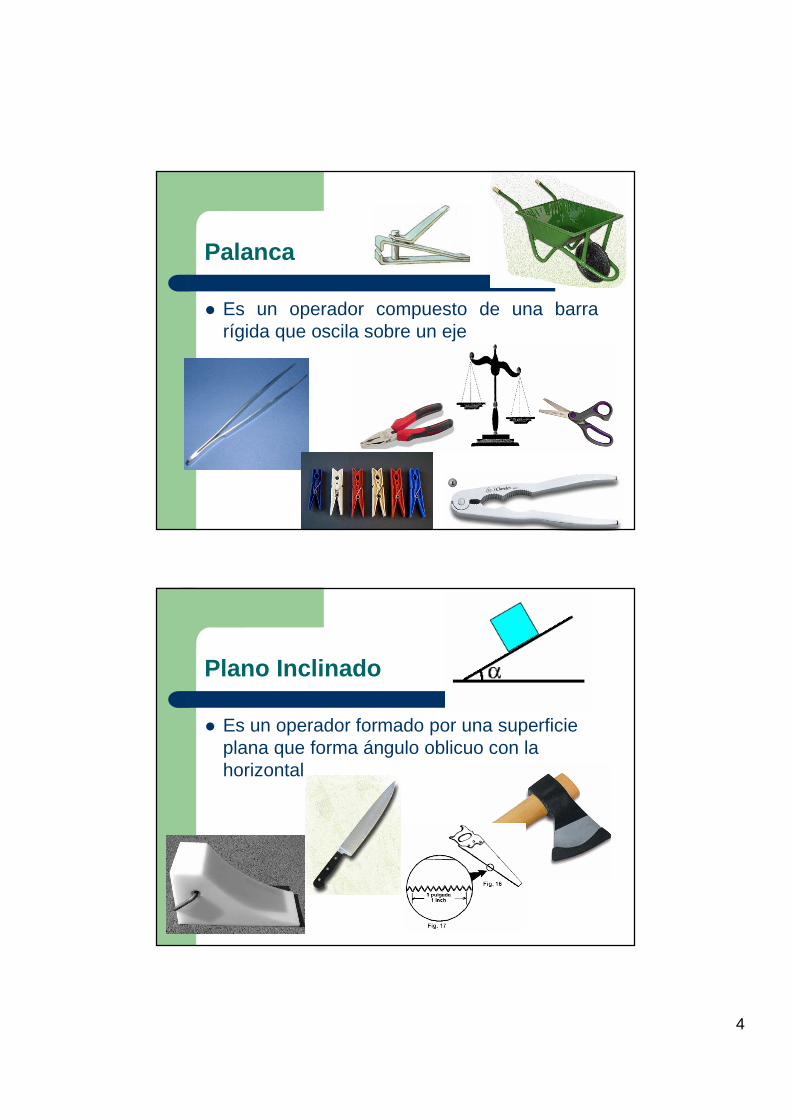
Palanca
� Es un operador compuesto de una barra rígida que oscila sobre un eje
Plano Inclinado
� Es un operador formado por una superficie plana que forma ángulo oblicuo con la horizontal
5
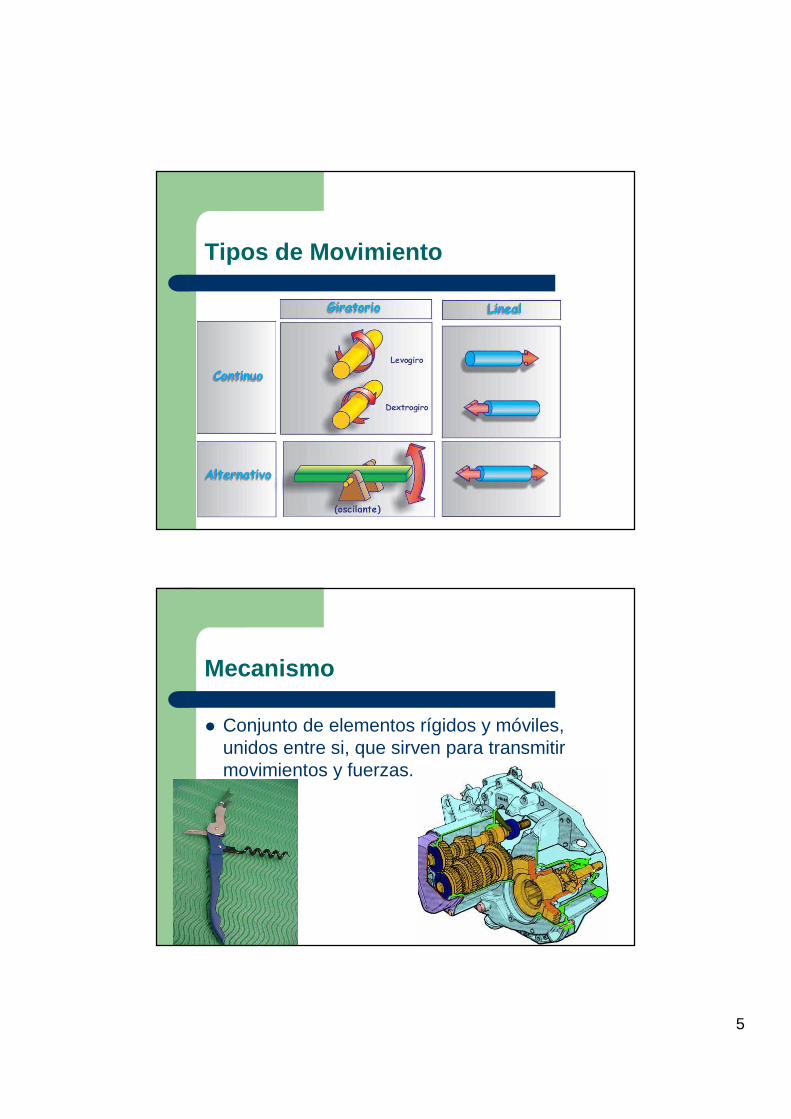
Tipos de Movimiento
Mecanismo
� Conjunto de elementos rígidos y móviles, unidos entre si, que sirven para transmitir movimientos y fuerzas.
6
Mecanismos para Transmitir y Transformar Movimientos.
� Palanca� Polea Fija y Móvil� Polipasto� Ruedas de Fricción� Engranajes� Poleas de Transmisión� Rueda dentada-cadena
� Tornillo sin-fin� Piñón-Cremallera� Tornillo-Tuerca� Trinquete� Leva� Excéntrica� Biela-Manivela� Cigüeñal
Palanca
� es una barra rígida que oscila sobre un punto de apoyo denominado fulcro .
� Elementos de una Palanca– Resistencia R: es la fuerza que queremos vencer– Potencia P: fuerza que tenemos que hacer para
vencer la resistencia.– Punto de apoyo o fulcro.
7
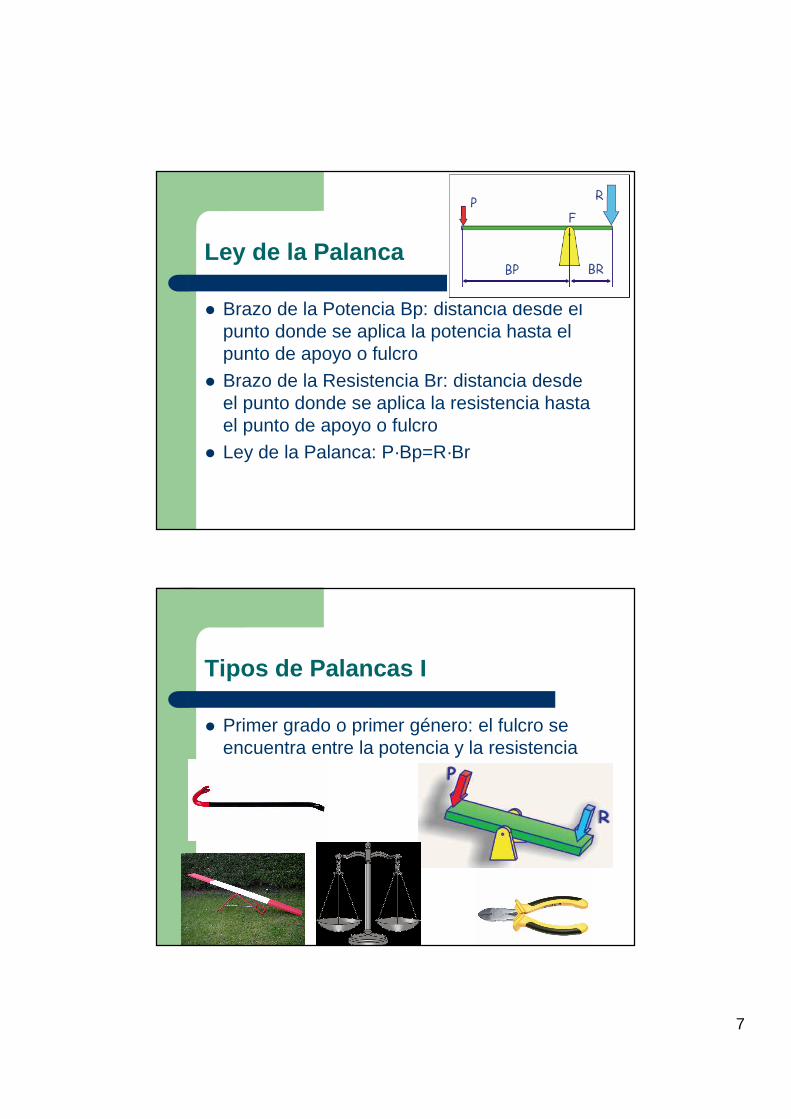
Ley de la Palanca
� Brazo de la Potencia Bp: distancia desde el punto donde se aplica la potencia hasta el punto de apoyo o fulcro
� Brazo de la Resistencia Br: distancia desde el punto donde se aplica la resistencia hasta el punto de apoyo o fulcro
� Ley de la Palanca: P·Bp=R·Br
Tipos de Palancas I
� Primer grado o primer género: el fulcro se encuentra entre la potencia y la resistencia
8
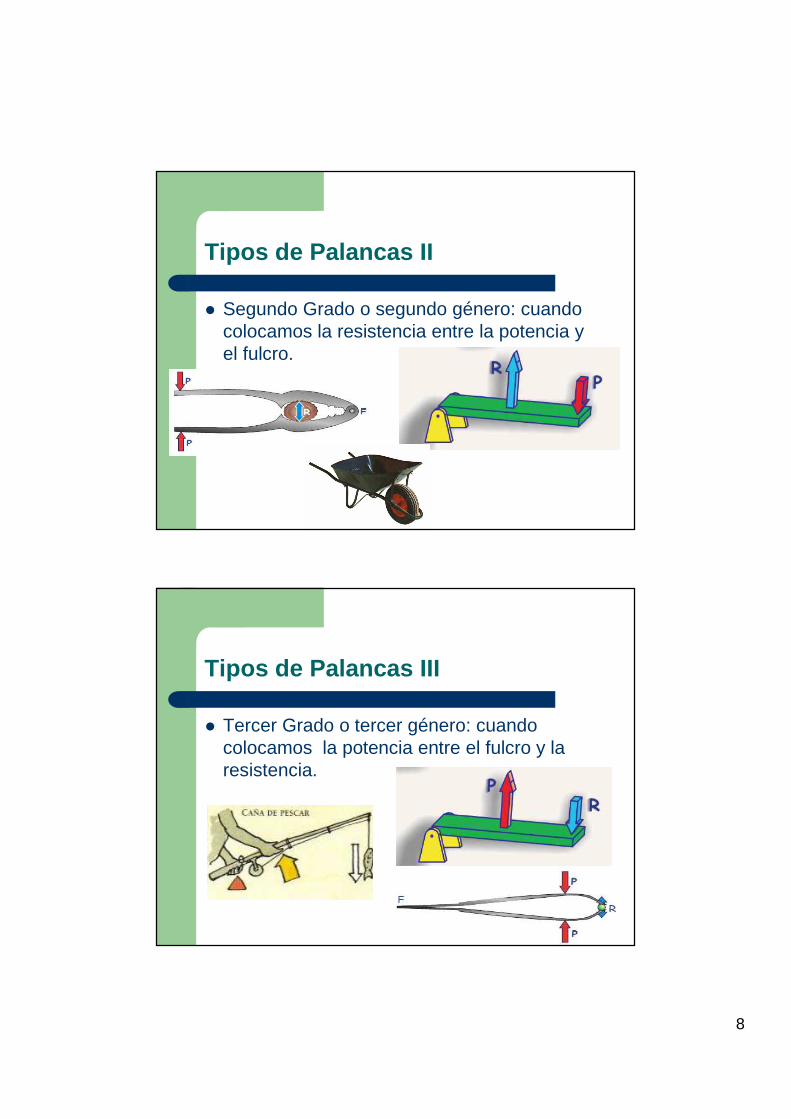
Tipos de Palancas II
� Segundo Grado o segundo género: cuando colocamos la resistencia entre la potencia y el fulcro.
Tipos de Palancas III
� Tercer Grado o tercer género: cuando colocamos la potencia entre el fulcro y la resistencia.
9
Ejercicios
� Escribe el nombre de 3 objetos cuyo funcionamiento se basa en cada uno de los 3 tipos de palancas
� Analiza el funcionamiento de un cortauñas.
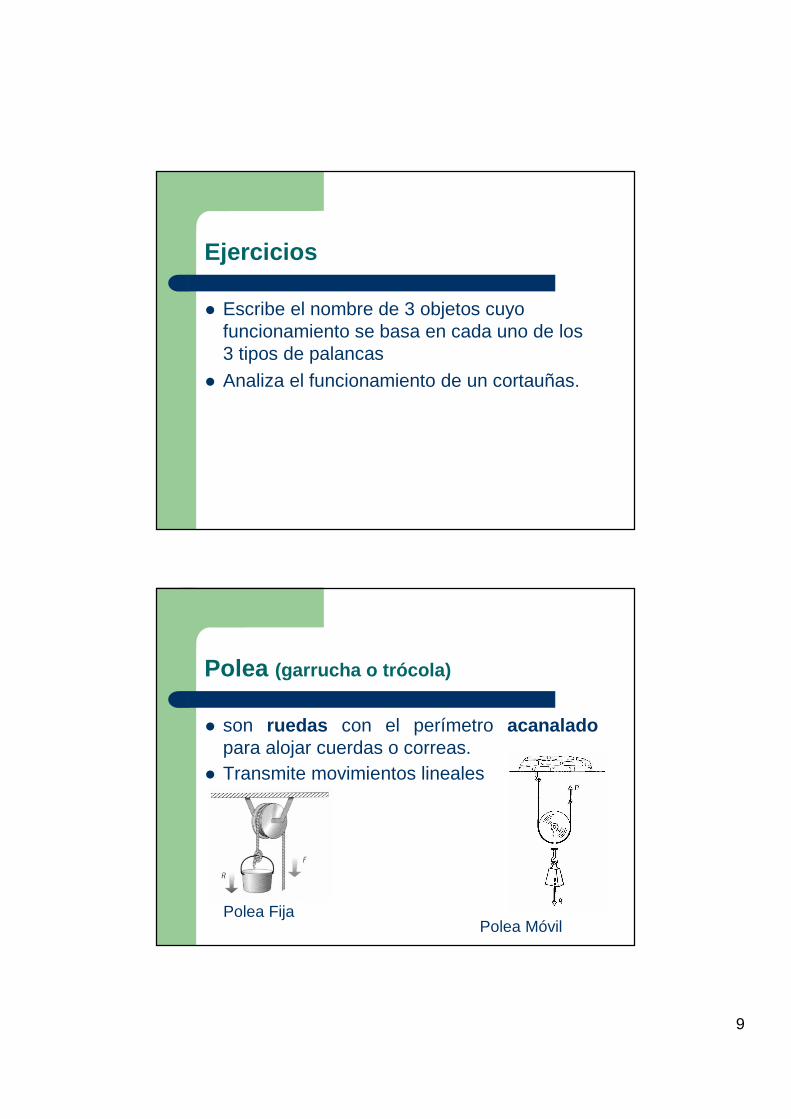
Polea (garrucha o trócola)
� son ruedas con el perímetro acanalado para alojar cuerdas o correas.
� Transmite movimientos lineales
Polea FijaPolea Móvil
10
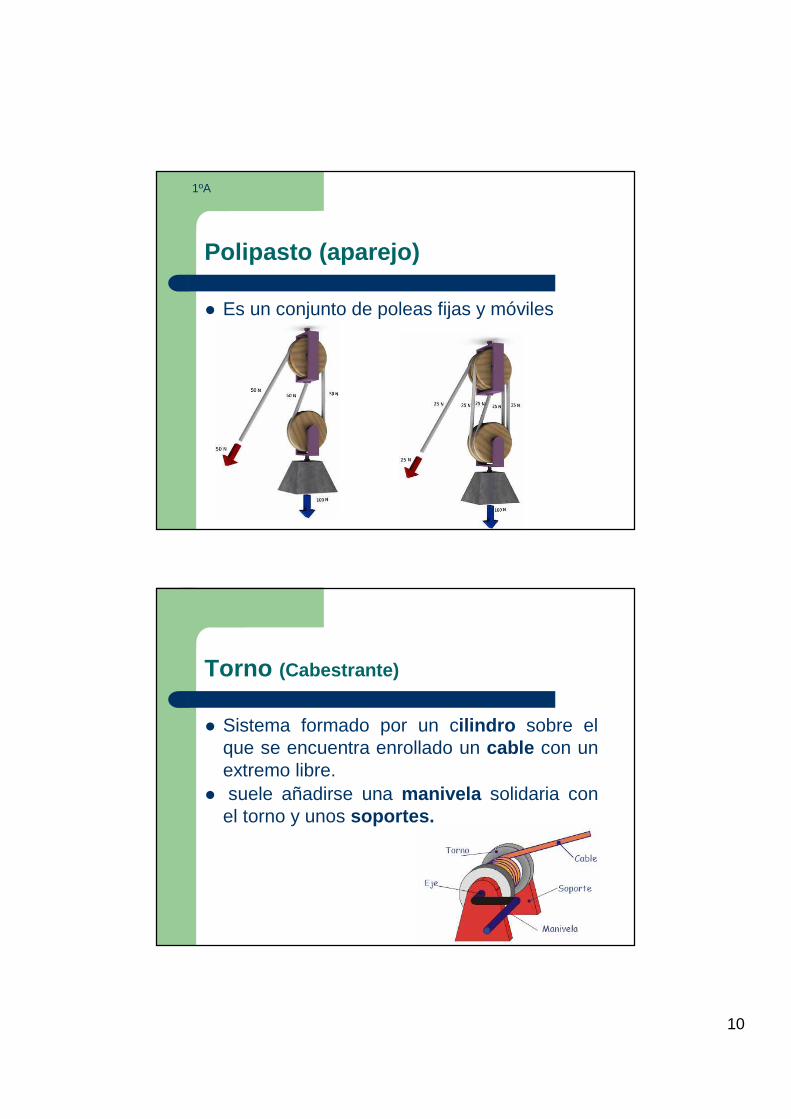
Polipasto (aparejo)
� Es un conjunto de poleas fijas y móviles
1ºA
Torno (Cabestrante)
� Sistema formado por un cilindro sobre el que se encuentra enrollado un cable con un extremo libre.
� suele añadirse una manivela solidaria con el torno y unos soportes.
11
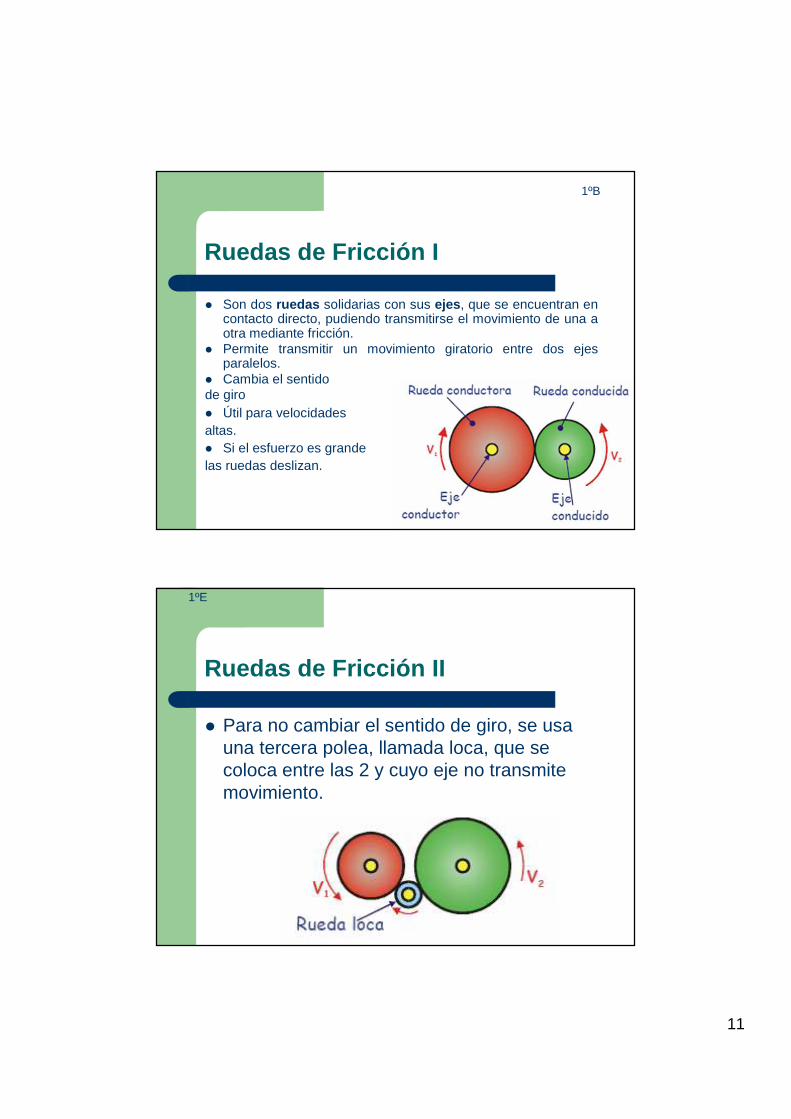
Ruedas de Fricción I
� Son dos ruedas solidarias con sus ejes , que se encuentran en contacto directo, pudiendo transmitirse el movimiento de una a otra mediante fricción.
� Permite transmitir un movimiento giratorio entre dos ejes paralelos.
� Cambia el sentido de giro� Útil para velocidades altas.� Si el esfuerzo es grande las ruedas deslizan.
1ºB
Ruedas de Fricción II
� Para no cambiar el sentido de giro, se usa una tercera polea, llamada loca, que se coloca entre las 2 y cuyo eje no transmite movimiento.
1ºE

12
Engranajes
� Consta de dos ruedas dentadas que engranan, lo que evita el deslizamiento entre las ruedas.
� Al engranaje de mayor tamaño se le denomina rueda y al de menor piñón .
� Transmite el movimiento giratorio entre dos ejes paralelos.
No cambia el sentido de giro
Cambia el sentido de giro
1ºF
Tipos de Engranajes
Rectos o Cilíndricos Cónicos
Helicoidales
13
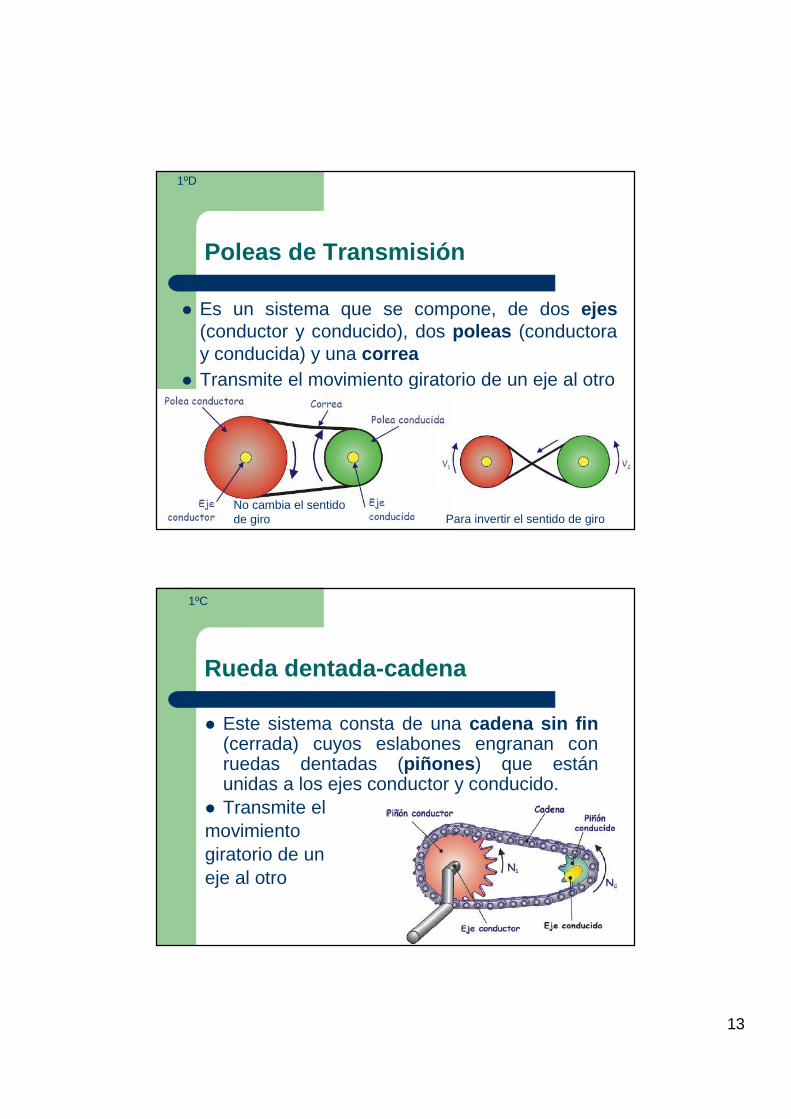
Poleas de Transmisión
� Es un sistema que se compone, de dos ejes (conductor y conducido), dos poleas (conductora y conducida) y una correa
� Transmite el movimiento giratorio de un eje al otro
Para invertir el sentido de giroNo cambia el sentido de giro
1ºD
Rueda dentada-cadena
� Este sistema consta de una cadena sin fin (cerrada) cuyos eslabones engranan con ruedas dentadas (piñones ) que están unidas a los ejes conductor y conducido.
� Transmite el movimientogiratorio de un eje al otro
1ºC
14
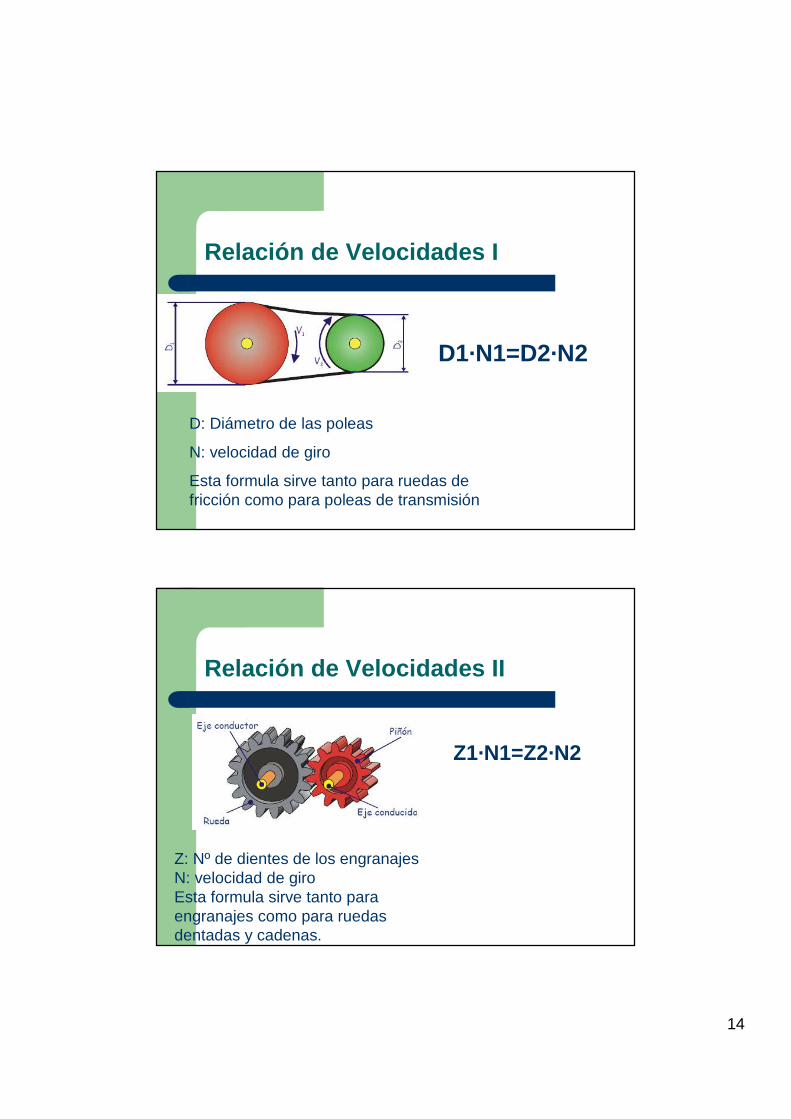
Relación de Velocidades I
D: Diámetro de las poleas
N: velocidad de giro
Esta formula sirve tanto para ruedas de fricción como para poleas de transmisión
D1·N1=D2·N2
Relación de Velocidades II
Z: Nº de dientes de los engranajesN: velocidad de giro Esta formula sirve tanto para engranajes como para ruedas dentadas y cadenas.
Z1·N1=Z2·N2
15
Relación de Transmisión
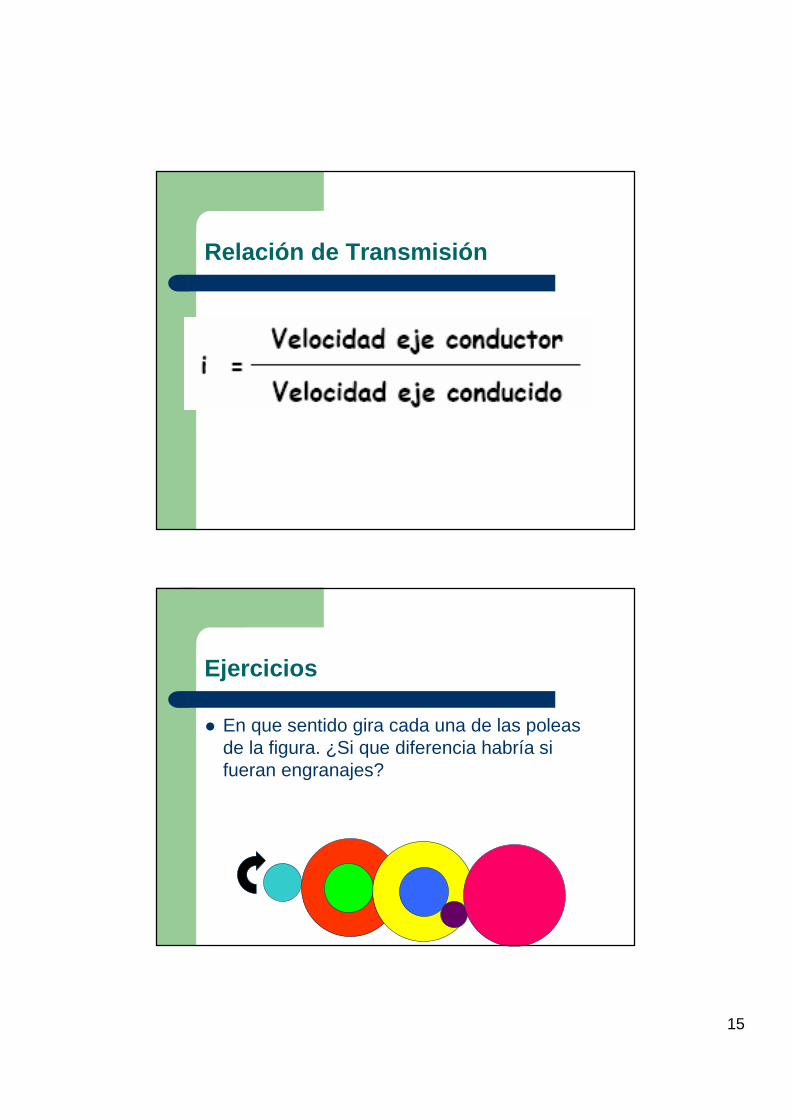
Ejercicios
� En que sentido gira cada una de las poleas de la figura. ¿Si que diferencia habría si fueran engranajes?
16
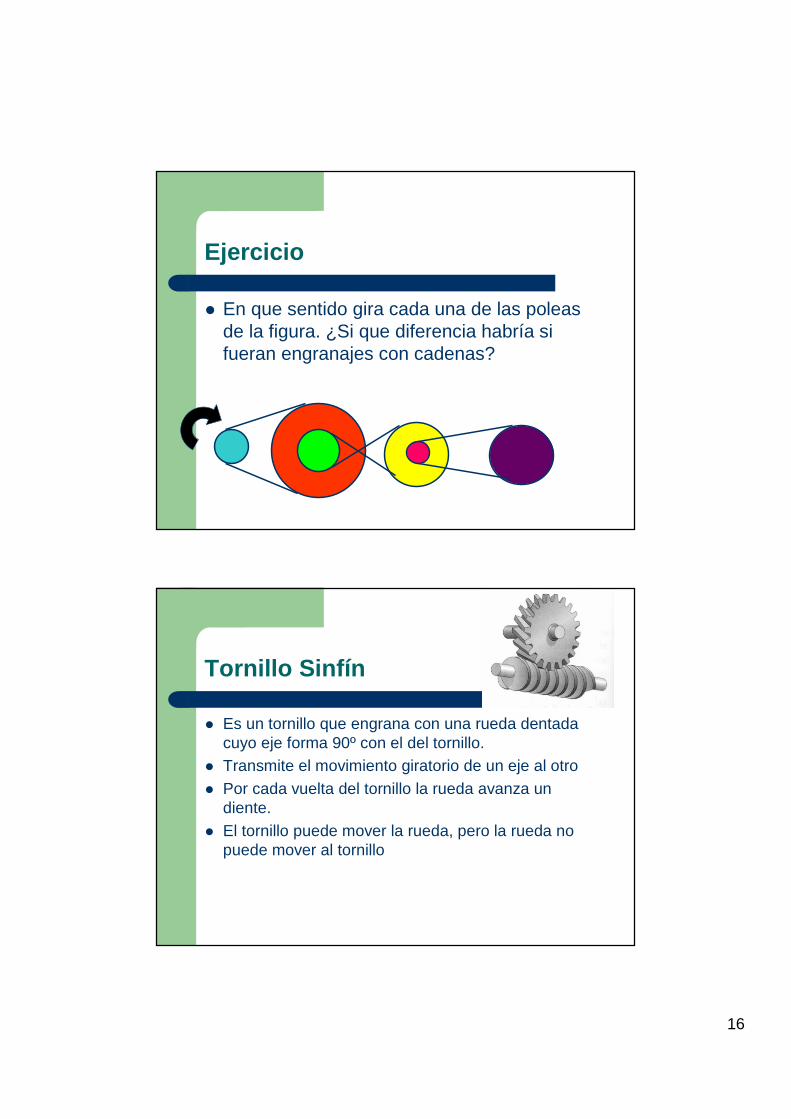
Ejercicio
� En que sentido gira cada una de las poleas de la figura. ¿Si que diferencia habría si fueran engranajes con cadenas?
Tornillo Sinfín
� Es un tornillo que engrana con una rueda dentada cuyo eje forma 90º con el del tornillo.
� Transmite el movimiento giratorio de un eje al otro� Por cada vuelta del tornillo la rueda avanza un
diente.� El tornillo puede mover la rueda, pero la rueda no
puede mover al tornillo
17
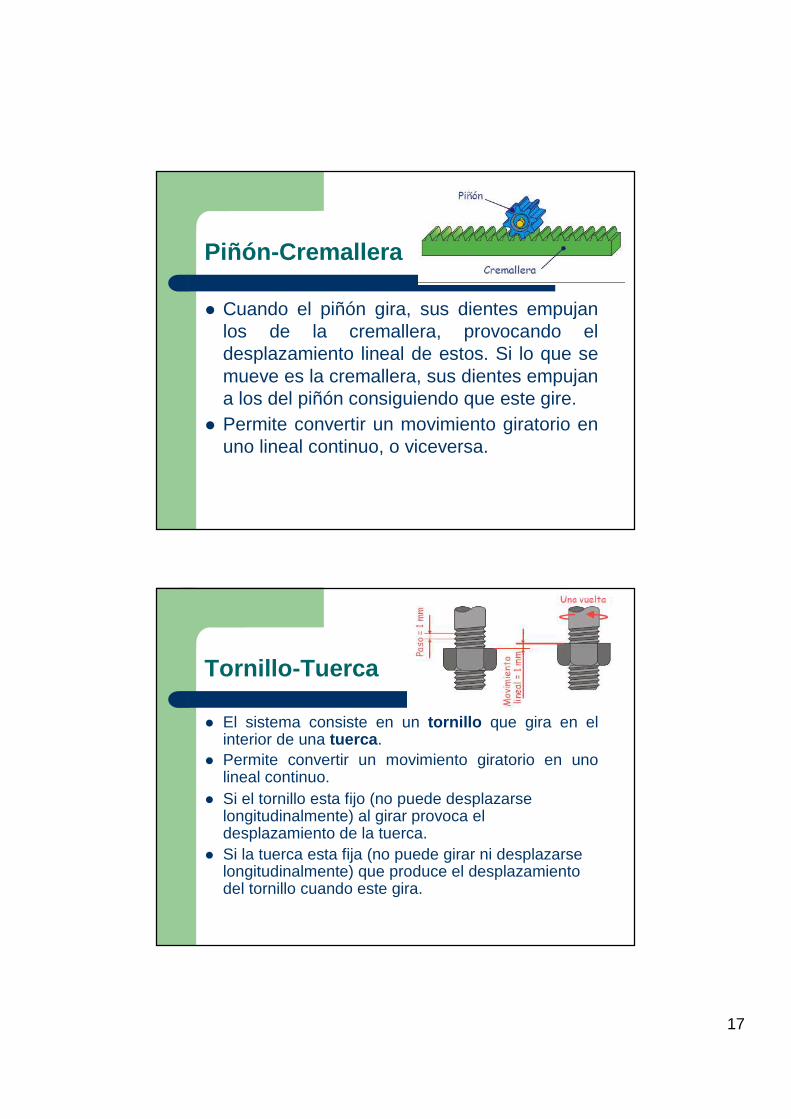
Piñón-Cremallera
� Cuando el piñón gira, sus dientes empujan los de la cremallera, provocando el desplazamiento lineal de estos. Si lo que se mueve es la cremallera, sus dientes empujan a los del piñón consiguiendo que este gire.
� Permite convertir un movimiento giratorio en uno lineal continuo, o viceversa.
Tornillo-Tuerca
� El sistema consiste en un tornillo que gira en el interior de una tuerca .
� Permite convertir un movimiento giratorio en uno lineal continuo.
� Si el tornillo esta fijo (no puede desplazarse longitudinalmente) al girar provoca el desplazamiento de la tuerca.
� Si la tuerca esta fija (no puede girar ni desplazarse longitudinalmente) que produce el desplazamiento del tornillo cuando este gira.
18
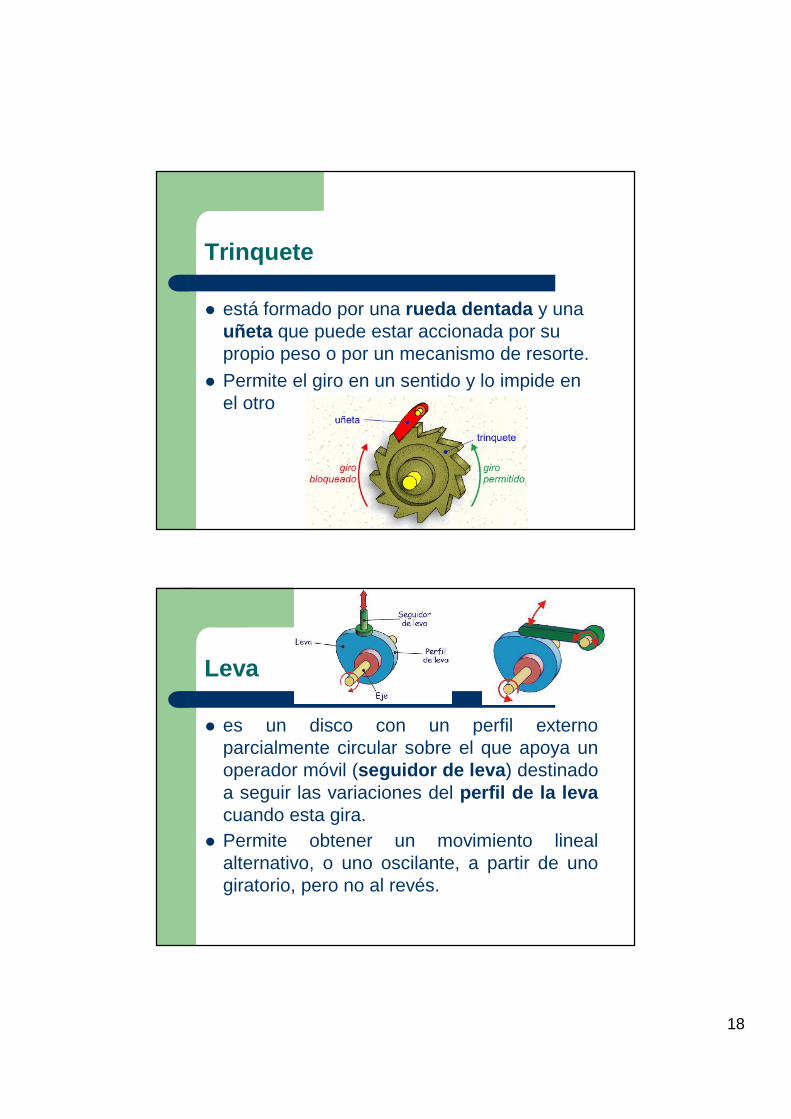
Trinquete
� está formado por una rueda dentada y una uñeta que puede estar accionada por su propio peso o por un mecanismo de resorte.
� Permite el giro en un sentido y lo impide en el otro
Leva
� es un disco con un perfil externo parcialmente circular sobre el que apoya un operador móvil (seguidor de leva ) destinado a seguir las variaciones del perfil de la leva cuando esta gira.
� Permite obtener un movimiento lineal alternativo, o uno oscilante, a partir de uno giratorio, pero no al revés.
19
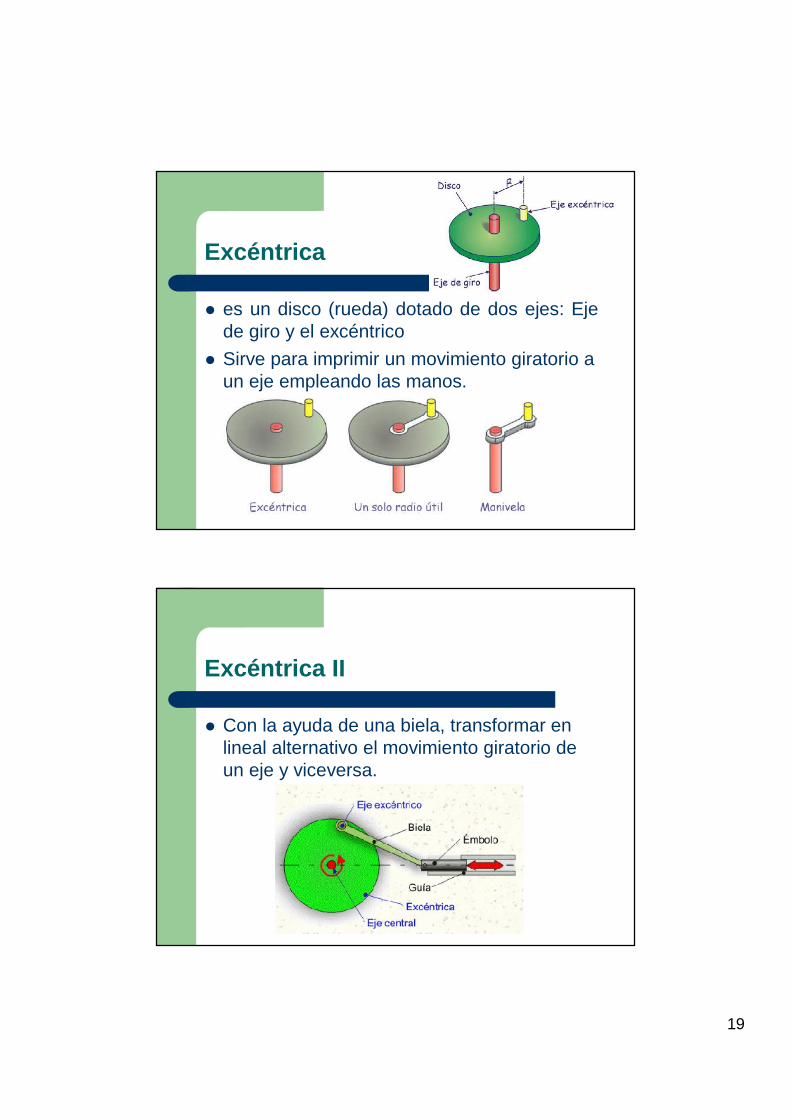
Excéntrica
� es un disco (rueda) dotado de dos ejes: Eje de giro y el excéntrico
� Sirve para imprimir un movimiento giratorio a un eje empleando las manos.
Excéntrica II
� Con la ayuda de una biela, transformar en lineal alternativo el movimiento giratorio de un eje y viceversa.
20
Biela-Manivela
Permite convertir un movimiento giratorio en rectilíneo alternativo y viceversa.
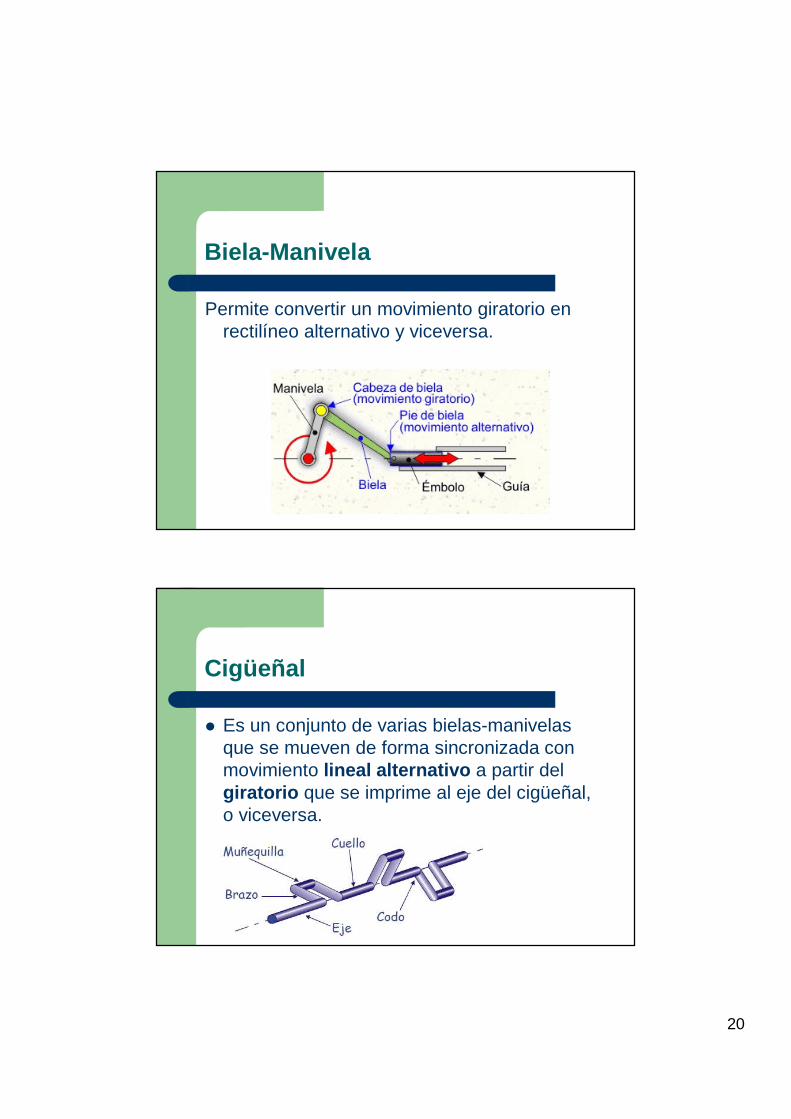
Cigüeñal
� Es un conjunto de varias bielas-manivelas que se mueven de forma sincronizada con movimiento lineal alternativo a partir del giratorio que se imprime al eje del cigüeñal, o viceversa.
21
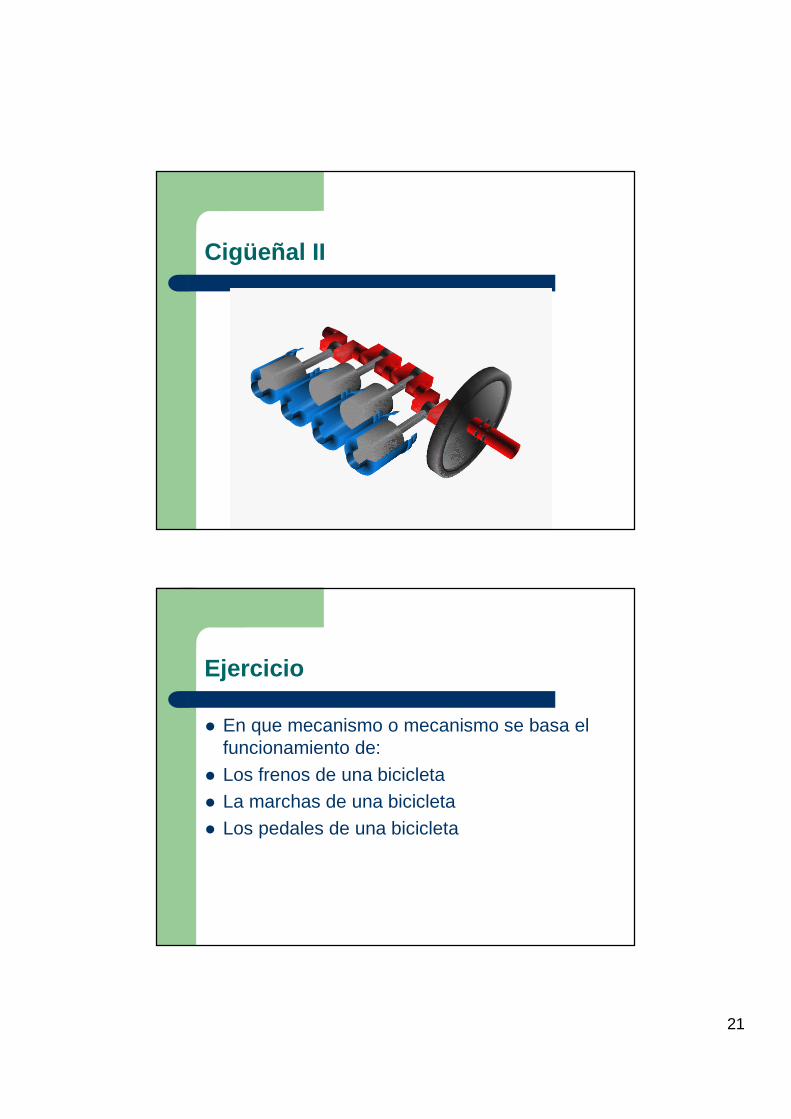
Cigüeñal II
Ejercicio
� En que mecanismo o mecanismo se basa el funcionamiento de:
� Los frenos de una bicicleta� La marchas de una bicicleta� Los pedales de una bicicleta
22
Ejercicio
� Qué maquina, mecanismo o mecanismos utilizarías para las siguientes situaciones: razona tu respuesta
� Subir y bajar un ascensor� Mover unas escaleras mecánicas� Girar las ruedas de un coche� Abrir y cerrar una puerta automática.