systèmes oscillants oscillateur harmonique amorti ...psychosmose.free.fr/physics/ondes/systèmes...
TRANSCRIPT
1
Systèmes oscillants
Oscillateur harmonique amorti, oscillations libres amorties
L'objet de cette ressource est l'étude des systèmes physiques, de type mécanique,
électrique ou microscopique, se comportant comme des oscillateurs libres amortis
et décrits par le modèle de l'oscillateur harmonique amorti.
Prérequis indispensables :
Savoir définir un système physique oscillant.
Connaître le modèle de l'oscillateur harmonique.
Savoir appliquer le Principe fondamental de la dynamique à un système
mécanique.
Savoir appliquer la loi des mailles à un circuit électrique et exprimer les
différences de potentiel aux bornes d'une bobine, d'un condensateur et d'une
résistance.
Connaître les expressions des énergies cinétique, potentielle élastique et
mécanique.
Connaître les expressions des énergies emmagasinées dans une bobine et
dans un condensateur, dissipée dans une résistance.
Savoir résoudre les équations différentielles du second ordre, linéaires, à
coefficients constants, sans second membre.
Objectifs :
Savoir décrire le modèle de l'oscillateur harmonique amorti et savoir
l'appliquer à l'étude de systèmes physiques oscillants.
Savoir étudier les réponses de ces systèmes, en tenant compte des paramètres
caractéristiques et des conditions initiales, et cela pour des excitations
diverses.
Savoir étudier l'énergie de tels systèmes.
Temps de travail prévu : 120 minutes
2
SOMMAIRE
RAPPEL PRELIMINAIRE .................................................................................................................. 3
L'OSCILLATEUR HARMONIQUE AMORTI .................................................................................. 4
Présentation .......................................................................................................................................... 4
Approche analytique ............................................................................................................................. 5
Approche énergétique ........................................................................................................................... 5
EXEMPLES ............................................................................................................................................ 6
Oscillateur mécanique : système amorti [masse, ressort] horizontal ..................................................... 6
Autres exemples d'oscillateurs mécaniques .......................................................................................... 8
Oscillateur électrique : circuit série (R, L, C) ........................................................................................... 9
OSCILLATIONS LIBRES AMORTIES ........................................................................................... 10
Résolution de l'équation différentielle ................................................................................................ 10
Régimes d'évolution ............................................................................................................................ 12
Expressions des constantes ................................................................................................................. 14
Réponses d'oscillateurs harmoniques amortis ..................................................................................... 16
Etude de la forme de la réponse d'un oscillateur harmonique amorti en fonction des conditions initiales ................................................................................................................................................ 17
GRANDEURS CARACTERISTIQUES ........................................................................................... 20
La pseudo-période ............................................................................................................................... 20
Le décrément logarithmique ............................................................................................................... 21
La constante de temps et le temps de relaxation ................................................................................ 21
Le facteur de qualité ............................................................................................................................ 22
Conclusion ........................................................................................................................................... 23
ETUDE DE L'ENERGIE ................................................................................................................... 24
Energie dissipée, facteur de qualité ..................................................................................................... 24
ANALOGIE ENTRE OSCILLATEURS MECANIQUE ET ELECTRIQUE ................................. 25
Oscillateurs analogues ......................................................................................................................... 25

3
Rappel préliminaire
La variable caractéristique du système physique étudié est notée d'une façon
générale q lorsque le type du système (mécanique, électrique...) n'est pas précisé.
Suivant le type de système, q représente la position d'un point matériel, une
intensité ou une tension électrique, la charge portée par un condensateur, un
moment dipolaire, une densité moyenne d'électrons dans un plasma...
Lorsque le type du système est défini, la notation correspondante de q est utilisée.
La fonction décrit l'évolution du système au cours du temps.
Les dérivations première et seconde par rapport au temps sont notées
respectivement :
et .
Sommaire
4
L'oscillateur harmonique amorti
L'oscillateur harmonique amorti
Présentation
Considérons un système physique dont les oscillations sont décrites par la variable
dynamique , le système constitue un oscillateur harmonique amorti si
satisfait à l'équation différentielle :
ou
où et désignent respectivement la pulsation propre et le coefficient
d'amortissement. et sont deux constantes positives caractéristiques du
système, ces deux constantes s'expriment en .
La notation est également utilisée pour désigner le coefficient d'amortissement.
La solution de l'équation différentielle (ou réponse de l'oscillateur) décrit les
oscillations libres et amorties du système. q s'exprime en unité SI de la grandeur
physique représentée. L'oscillateur évolue suivant un régime transitoire libre du
second ordre.
Remarquons que si , on retrouve le modèle de l'oscillateur harmonique.
Sommaire
5
L'oscillateur harmonique amorti
Approche analytique
Mathématiquement, l'équation précédente, , est une
équation différentielle linéaire du second ordre à coefficients constants, de forme
générale :
En identifiant terme à terme les deux types d'équations mathématique et physique,
il vient : , , et .
Les expressions de la solution générale se déduisent de la résolution de
l'équation différentielle. Elles sont exposées par la suite.
Sommaire
L'oscillateur harmonique amorti
Approche énergétique
A l'instant initial, l'excitation fournit au système une quantité d'énergie : le système
est mis en oscillation.
L'énergie décroît ensuite en fonction du temps, jusqu'à une valeur nulle : le système
perd de l'énergie par des phénomènes de dissipation (amortissement, frottement,
effet Joule...).
Les oscillations libres des systèmes physiques se font en général avec une telle
décroissance de l'énergie.
Sommaire
6
Exemples
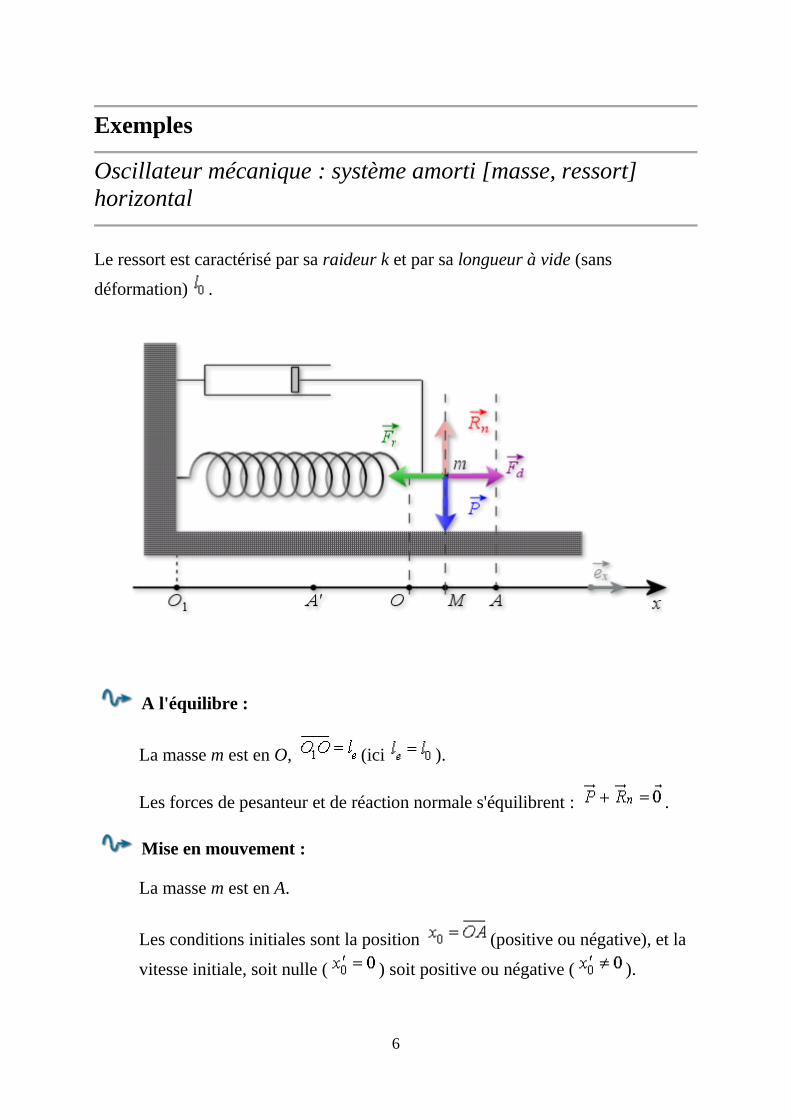
Oscillateur mécanique : système amorti [masse, ressort]
horizontal
Le ressort est caractérisé par sa raideur k et par sa longueur à vide (sans
déformation) .
A l'équilibre :
La masse m est en O, (ici ).
Les forces de pesanteur et de réaction normale s'équilibrent : .
Mise en mouvement :
La masse m est en A.
Les conditions initiales sont la position (positive ou négative), et la
vitesse initiale, soit nulle ( ) soit positive ou négative ( ).

7
En mouvement à un instant t :
La masse m est en M.
On repère la position de m par rapport à la position d'équilibre O soit
.
Appliquons le Principe Fondamental de la Dynamique à m :
où est une force dissipative, force représentant l'amortissement ; si l'on
suppose que l'amortissement est de type visqueux la force est
proportionnelle à la vitesse et de sens opposé à celle-ci, on la note
( coefficient constant positif). correspond à une force se frottement.
Projetons l'équation vectorielle précédente sur l'axe , et étant
orthogonaux à l'axe, il vient : .
On pose et .
On constate que l'équation différentielle précédente est du type oscillateur
harmonique amorti de coefficient d'amortissement et de pulsation
propre .
Sommaire

8
Autres exemples d'oscillateurs mécaniques
Système [masse, ressort] vertical amorti [k, l, m]
Pendule simple amorti [l, m]
(g : accélération de la pesanteur, approximation des petits angles)
Pendule de torsion amorti [C, l, m]
(C : constante de torsion du fil, I : moment d'inertie)
Sommaire

9
Exemples
Oscillateur électrique : circuit série (R, L, C)
Dans cet exemple, nous étudions la décharge d'un condensateur à travers une
bobine et une résistance.
Conditions initiales : et
A l'instant initial le circuit est fermé ; désignons à un instant t par la
charge du condensateur, par l'intensité du circuit et par , et
les tensions respectives aux bornes de la bobine, de la résistance et du
condensateur.
Mise en équation du système, équation en intensité
, explicitons les
tensions , dérivons
par rapport à t, il vient,
ou
On pose : et .
L'équation différentielle ci-dessus est du type oscillateur harmonique amorti
de coefficient d'amortissement et de pulsation propre .
Autres équations

10
Sachant que , d'après les conventions utilisées sur la figure, on
établit facilement à partir de l'équation différentielle précédente l'équation
satisfaite par la charge instantanée du condensateur :
Sachant que , on déduit de l'équation relative à la charge,
l'équation satisfaite par la tension instantanée aux bornes du condensateur :
Sommaire
Oscillations libres amorties
Oscillations libres amorties
Résolution de l'équation différentielle
Mathématiquement, l'équation est une équation
différentielle linéaire du second ordre à coefficients constants, de forme générale
.
En identifiant terme à terme les deux types d'équations mathématique et physique
il vient : et .
A partir des expressions de la solution générale , que l'on suppose connues, suivant les valeurs positive, nulle ou négative du discriminant
ou du discriminant réduit , on obtient directement
les expressions de données dans la page suivante.
Rappelons également le calcul complet de résolution à partir de l'équation
physique.

11
Rappel de la méthode de résolution de l'équation différentielle du second
ordre linéaire et à coefficients constants (1)
On montre en mathématiques que la solution générale d'une telle
équation est une combinaison linéaire de deux solutions linéairement
indépendantes et :
(A et B étant deux constantes) (2)
La recherche des solutions et se fait en considérant la fonction
et en reportant cette fonction dans l'équation (1).
Sachant que et que l'équation (1) conduit à l'équation
.
Nous obtenons ainsi l'équation caractéristique associée à l'équation
différentielle :
(3)
Si r satisfait à cette équation, alors satisfait à l'équation (1).
L'équation caractéristique possède en général deux racines (réelles ou
complexes conjuguées) et . On peut donc déterminer deux solutions
linéairement indépendantes de (1) :
et
La solution générale s'écrit :
La forme de dépend de la nature des racines et et donc des valeurs
positive, nulle ou négative du discriminant de l'équation caractéristique
associée ou du discriminant réduit .

12
Les expressions de sont données dans la page suivante.
Sommaire
Oscillations libres amorties
Régimes d'évolution
En fonction du discriminant réduit , on définit les trois régimes
suivants :
: régime apériodique
Il existe deux racines réelles nécessairement négatives :
Alors
Autre forme de : en rappelant que et , on
montre que .
: régime critique
Il existe une racine double réelle négative .
Dans ce cas particulier, on montre que est égale au produit d'une fonction
exponentielle par un polynôme d'ordre 1, soit : .
: régime pseudo-périodique (ou sinusoïdal amorti)

13
Il existe deux racines complexes conjuguées :
En introduisant la pseudo-pulsation , les racines s'écrivent :
En reportant les expressions des racines dans l'expression générale
, le calcul montre que s'écrit sous les trois formes
équivalentes :
Les oscillations sont sinusoïdales amorties :
de pseudo-pulsation ,
d'amplitude décroissante en fonction du temps suivant la loi :
de phase initiale (à ) ou .
Les constantes qui interviennent dans les diverses expressions de sont
explicitées dans la page suivante.
Sommaire

14
Oscillations libres amorties
Expressions des constantes
La solution générale dépend de deux constantes :
, , , ou .
Elles sont déterminées à l'aide de deux relations. En général dans un
problème physique ces relations caractérisent l'état du système à l'instant
initial , elles correspondent aux conditions initiales :
et
Les différentes constantes sont reliées entre elles par les relations suivantes :
On calcule facilement les expressions des constantes en fonction de et .
On obtient pour les différents régimes les relations suivantes :
régime apériodique,
régime critique,
15
régime pseudo-périodique,
(avec du signe de )
Sommaire
16
Oscillations libres amorties
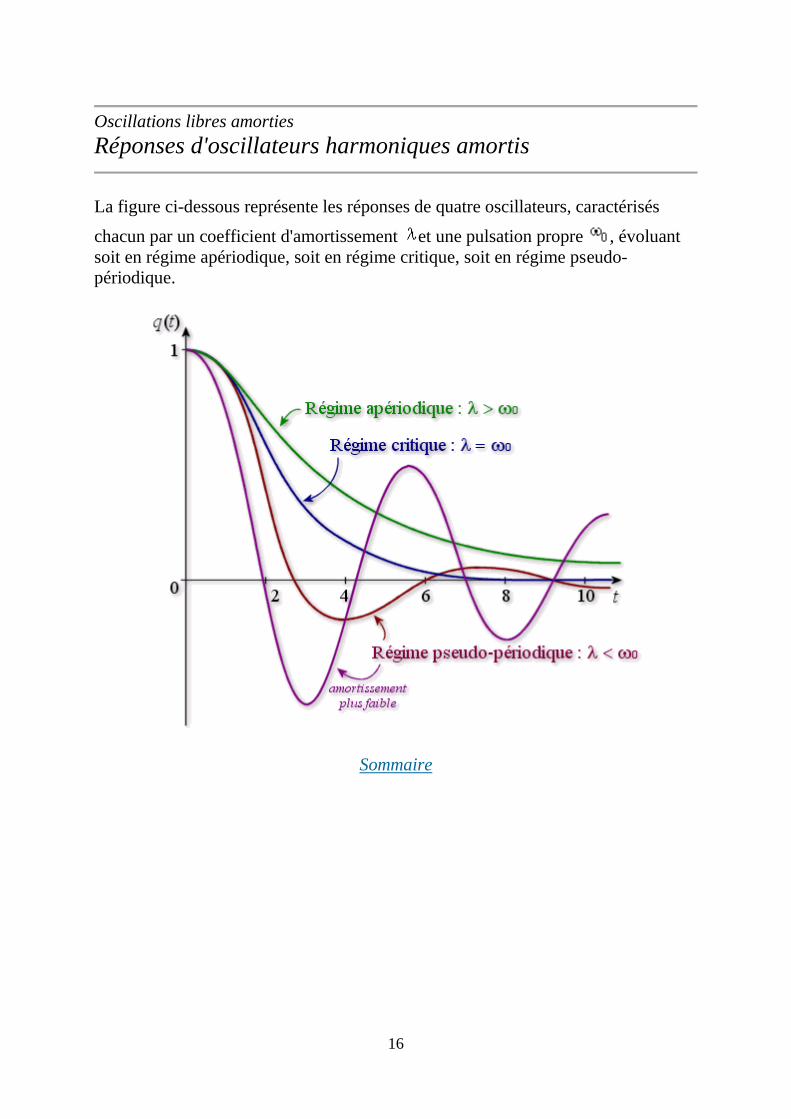
Réponses d'oscillateurs harmoniques amortis
La figure ci-dessous représente les réponses de quatre oscillateurs, caractérisés
chacun par un coefficient d'amortissement et une pulsation propre , évoluant
soit en régime apériodique, soit en régime critique, soit en régime pseudo-
périodique.
Sommaire
17
Oscillations libres amorties
Etude de la forme de la réponse d'un oscillateur harmonique
amorti en fonction des conditions initiales
Rappelons que :
Un oscillateur étant caractérisé par un coefficient d'amortissement et par une
pulsation propre , le type de régime d'évolution se déduit du calcul du
discriminant réduit : .
L'expression de la réponse d'un oscillateur donné dépend de deux
constantes qui sont déterminées à partir des deux conditions initiales :
et .
Connaissant , , et , l'expression de la réponse de l'oscillateur est
déterminée.
Les figures suivantes représentent les réponses de trois oscillateurs harmoniques
amortis différents évoluant respectivement :
en régime apériodique pour le premier,
en régime critique pour le second,
en régime pseudo-périodique pour le troisième.
La réponse de chaque oscillateur est représentée successivement pour trois couples
de valeurs des conditions initiales différents :
Pour chaque oscillateur, la condition est fixe, la condition varie. Les valeurs
numériques sont exprimées en unités SI.
Les expressions des réponses sont données pour chaque figure.
18
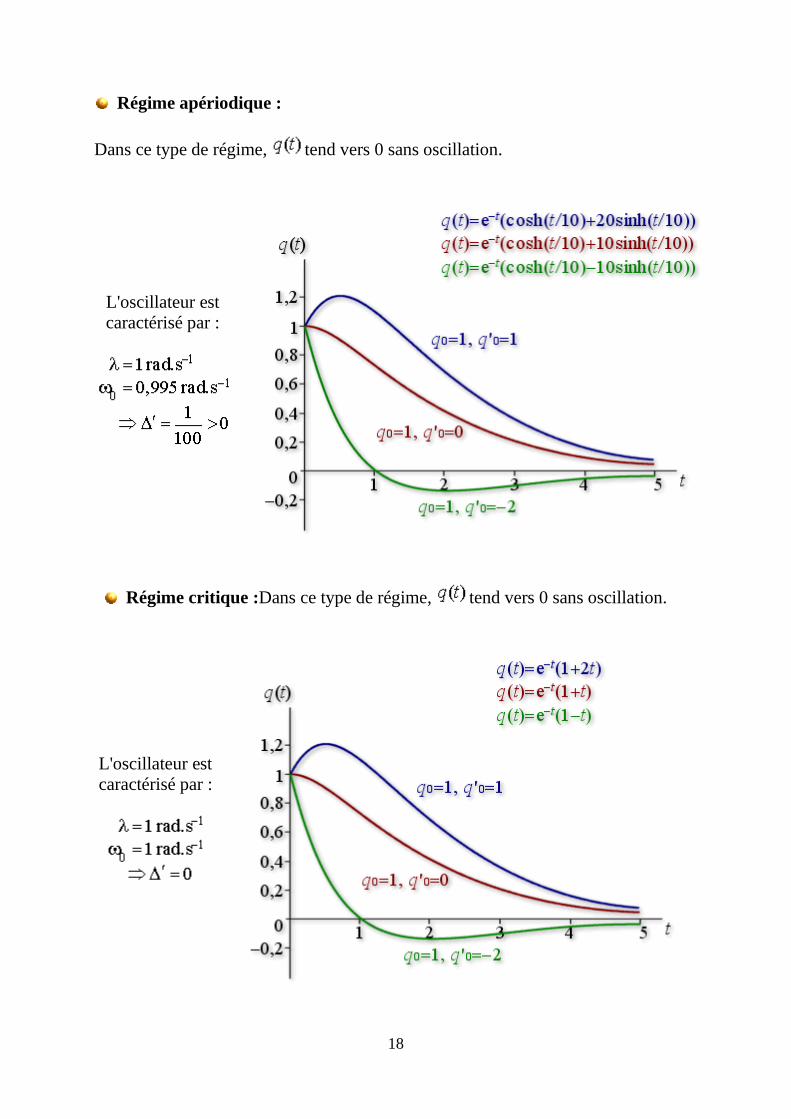
Régime apériodique :
Dans ce type de régime, tend vers 0 sans oscillation.
L'oscillateur est
caractérisé par :
Régime critique :Dans ce type de régime, tend vers 0 sans oscillation.
L'oscillateur est
caractérisé par :
19
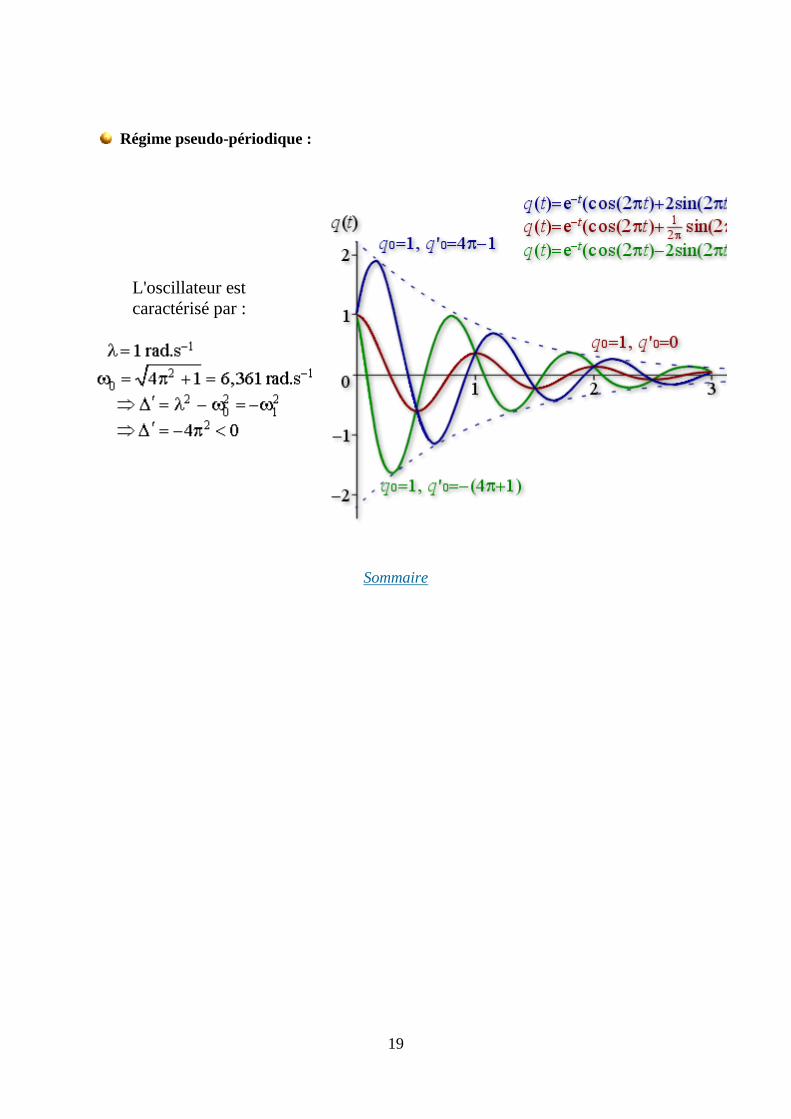
Régime pseudo-périodique :
L'oscillateur est
caractérisé par :
Sommaire
20
Grandeurs caractéristiques
Grandeurs caractéristiques
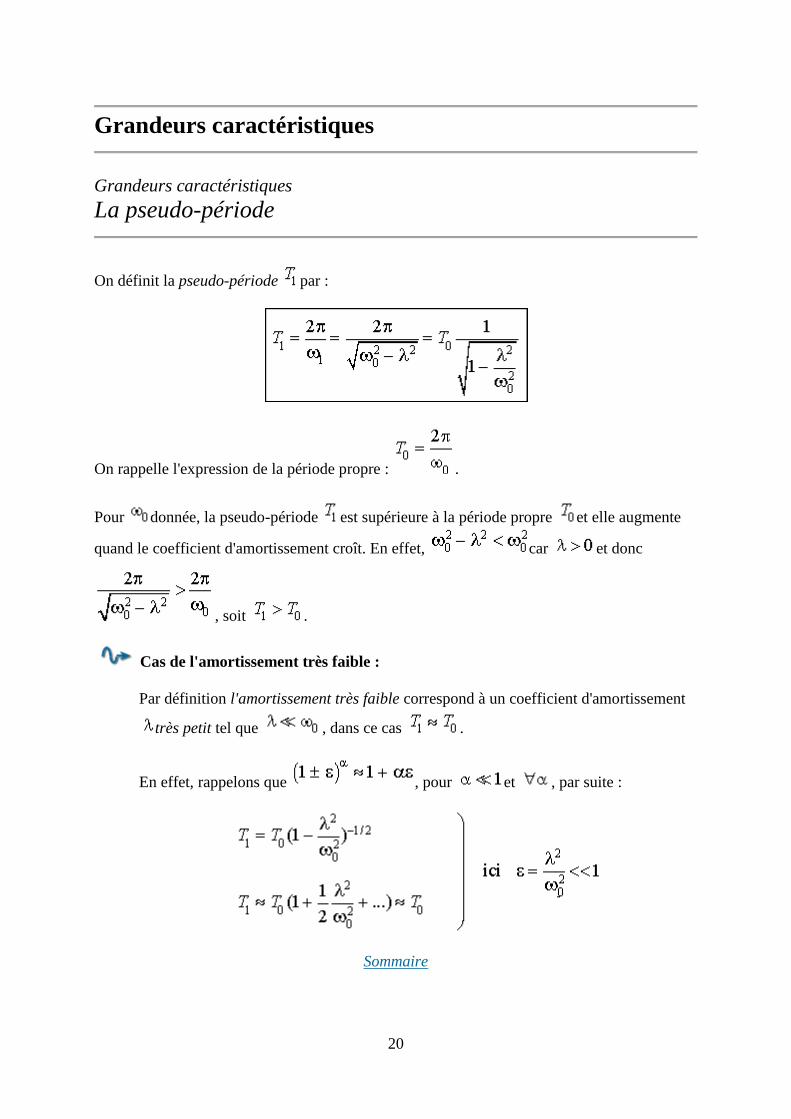
La pseudo-période
On définit la pseudo-période par :
On rappelle l'expression de la période propre : .
Pour donnée, la pseudo-période est supérieure à la période propre et elle augmente
quand le coefficient d'amortissement croît. En effet, car et donc
, soit .
Cas de l'amortissement très faible :
Par définition l'amortissement très faible correspond à un coefficient d'amortissement
très petit tel que , dans ce cas .
En effet, rappelons que , pour et , par suite :
Sommaire
21
Grandeurs caractéristiques
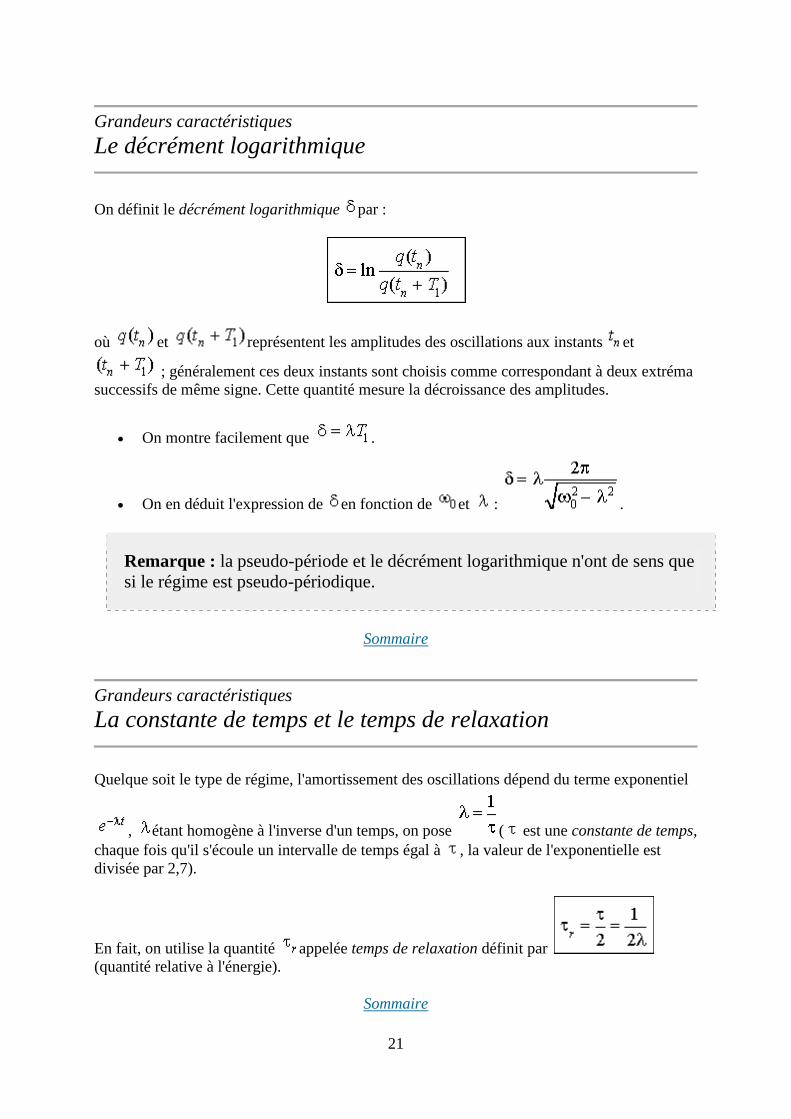
Le décrément logarithmique
On définit le décrément logarithmique par :
où et représentent les amplitudes des oscillations aux instants et
; généralement ces deux instants sont choisis comme correspondant à deux extréma
successifs de même signe. Cette quantité mesure la décroissance des amplitudes.
On montre facilement que .
On en déduit l'expression de en fonction de et : .
Remarque : la pseudo-période et le décrément logarithmique n'ont de sens que
si le régime est pseudo-périodique.
Sommaire
Grandeurs caractéristiques
La constante de temps et le temps de relaxation
Quelque soit le type de régime, l'amortissement des oscillations dépend du terme exponentiel
, étant homogène à l'inverse d'un temps, on pose ( est une constante de temps,
chaque fois qu'il s'écoule un intervalle de temps égal à , la valeur de l'exponentielle est
divisée par 2,7).
En fait, on utilise la quantité appelée temps de relaxation définit par
(quantité relative à l'énergie).
Sommaire

22
Grandeurs caractéristiques
Le facteur de qualité
On définit le facteur de qualité Q par les expressions :
ou
Plus l'amortissement est faible, plus la qualité du système est grande. Or Q est d'autant plus
grand, à donné, que l'amortissement est faible, d'où le nom de facteur de qualité.
Il existe également deux autres définitions de Q liées :
l'une à l'énergie : , où est l'énergie totale du système à
l'instant , et est l'énergie dissipée pendant la pseudo-
période suivant .
l'autre à la bande passante en pulsation ou en fréquence (quantités définies
dans la ressource traitant des oscillations forcées, et désignant respectivement
la pulsation et la fréquence à la résonance) :
Dans le cas de l'amortissement très faible ( ) :
On montre d'une part que : et d'autre part que et .
Il en résulte que les deux dernières définitions du facteur de qualité sont dans ce cas
équivalentes à la définition donnée en premier : .
Notons qu'un grand nombre d'oscillateurs, principalement électriques, sont caractérisés
par un amortissement très faible et la dernière définition de Q est utilisée.
23
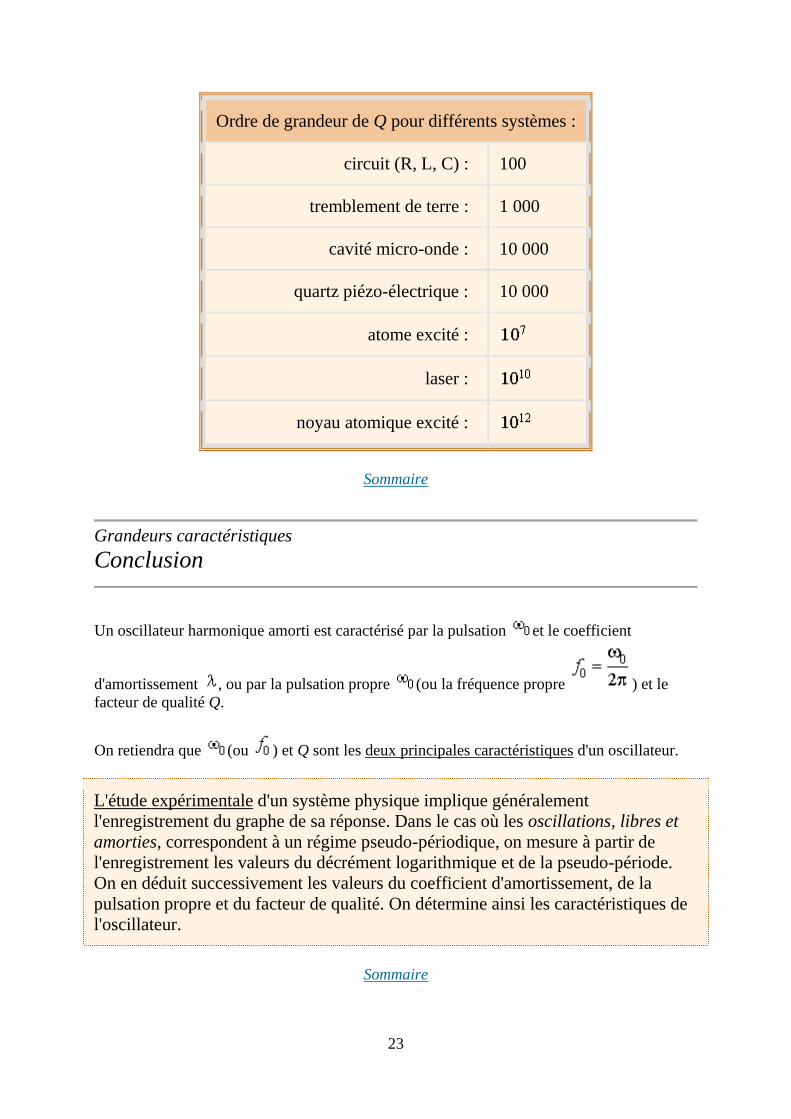
Ordre de grandeur de Q pour différents systèmes :
circuit (R, L, C) : 100
tremblement de terre : 1 000
cavité micro-onde : 10 000
quartz piézo-électrique : 10 000
atome excité :
laser :
noyau atomique excité :
Sommaire
Grandeurs caractéristiques
Conclusion
Un oscillateur harmonique amorti est caractérisé par la pulsation et le coefficient
d'amortissement , ou par la pulsation propre (ou la fréquence propre ) et le
facteur de qualité Q.
On retiendra que (ou ) et Q sont les deux principales caractéristiques d'un oscillateur.
L'étude expérimentale d'un système physique implique généralement
l'enregistrement du graphe de sa réponse. Dans le cas où les oscillations, libres et
amorties, correspondent à un régime pseudo-périodique, on mesure à partir de
l'enregistrement les valeurs du décrément logarithmique et de la pseudo-période.
On en déduit successivement les valeurs du coefficient d'amortissement, de la
pulsation propre et du facteur de qualité. On détermine ainsi les caractéristiques de
l'oscillateur.
Sommaire

24
Etude de l'énergie
Etude de l'énergie
Energie dissipée, facteur de qualité
Rappelons qu'un système physique, quelque soit son type mécanique, électrique ou autre, est
un système amorti. Il perd de l'énergie par des phénomènes de dissipation (amortissement,
frottement, effet Joule...) L'énergie totale du système décroît au cours du temps.
Energie dissipée au cours d'une pseudo-période :
Considérons un système amorti évoluant en régime pseudo-périodique ( ) de
pseudo-période .
Désignons par l'énergie totale de cet oscillateur à un instant (énergie
mécanique, électrique ou autre suivant le type d'oscillateur) et par
l'énergie dissipée par l'oscillateur entre les instants et
. L'instant correspondant à un extrémum des oscillations.
On établit les résultats suivants (voir la ressource d'exercices correspondante) :
Dans le cas de l'amortissement : .
Le décrément logarithmique étant constant pour un oscillateur harmonique donné,
l'énergie dissipée par le système au cours d'une pseudo-période est constante en valeur
relative.
Dans le cas de l'amortissement très faible ( ) : .
Dans ce cas, les deux définitions du facteur de qualité et
sont très peu différentes et la perte d'énergie en valeur relative s'écrit .
Plus le facteur de qualité est grand, moins le système dissipe de l'énergie.
25
Analogie entre oscillateurs mécanique et électrique
Analogie entre oscillateurs mécanique et électrique
Oscillateurs analogues
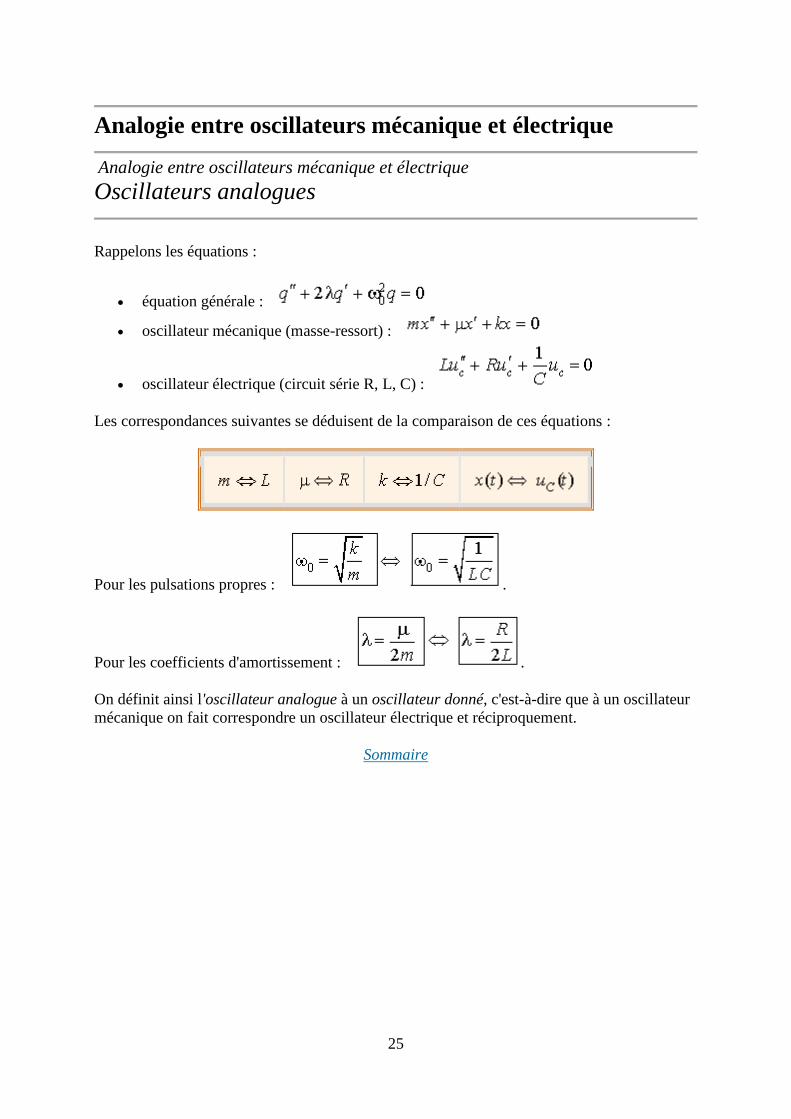
Rappelons les équations :
équation générale :
oscillateur mécanique (masse-ressort) :
oscillateur électrique (circuit série R, L, C) :
Les correspondances suivantes se déduisent de la comparaison de ces équations :
Pour les pulsations propres : .
Pour les coefficients d'amortissement : .
On définit ainsi l'oscillateur analogue à un oscillateur donné, c'est-à-dire que à un oscillateur
mécanique on fait correspondre un oscillateur électrique et réciproquement.
Sommaire