study on a multi-robot cooperative wireless communication ... · study on a multi-robot cooperative...
TRANSCRIPT

Study on a Multi-Robot Cooperative Wireless Communication Control System for the Spherical Amphibious Robot
Shuxiang Guo1,2, Xin Li1 Jian Guo1*
1Tianjin Key Laboratory for Control Theory & Applications in Complicated Systems and Biomedical Robot Laboratory
Tianjin University of Technology
2Intelligent Mechanical Systems Engineering Department Faculty of Engineering
Kagawa UniversityBinshui Xidao 391, Tianjin, China Takamatsu, Kagawa, Japan
[email protected]; [email protected]
*Corresponding Author: [email protected]
Abstract-In multi-robot cooperative control system where robots will complete a common task, it is significant to have a better communication among robots. This paper proposed a multi-robot cooperative control system for the spherical amphibious robot. The aim of this method is to set up a point to multipoint network which supports multiple robots link in. Moreover, Multi-robot cooperative control system is given to achieve master-slave approaches, where leader robot guides the slave robots. Multi-robot cooperative control system is a novel approach to the coordination of large numbers of relatively team robots which takes its inspiration from many aspects. We carried out some experiments, and experimental results indicated that using XBee modules with ZigBee protocol to transmit control signal to the robot is an efficiency way. ZigBee communication mode is very suitable for low power consumption, and low data transmission applications, which can be taken into consideration about the communication constraints among amphibious robots. The experimental results indicated that signals are transmitted efficiently in the low power environment by using XBee communications module, and proposed communication control system has excellent performance in low SNR environments. This communication system is very suitable in the low power environment, and the multi-robot cooperative wireless communication system can be used to underwater detection and environmental reconnaissance and military defense, etc.
Index Terms- Spherical amphibious robot; Multi-robot cooperative control; Atmega 2560; XBee module
I. INTRODUCTION
With the development of multi-robot technology in underwater detection, space exploration, dangerous environment task planning, information service and other occasions, the implementation of multiple robots cooperative control will be widely used in many areas. Compared with single robot to perform a task, multi-robot collaborative planning has many advantages, some tasks can be decomposed appropriately, each robot complete a single task, thus speeding up the task execution efficiency.
This paper proposes a new concept of multi-robot cooperative control system for the spherical amphibious robots; the amphibious robot can realize researches and discoveries for investigation, identification and salvage operations of both economic research and security care [1]. With the further improvement of the robot technology development and social demand, single robot capability, reliability and efficiency are greatly improved, but people's requirement of the robot is no longer limited to a single robot
control, but the multiple robots communication system is becoming more and more interested.
However, multi-robot communication method is an indispensable branch of spherical amphibious robot technology development. For interaction of the multi-robot communication, the multiple robots communication between robots is important to carry out specific task where one robot transmits orders to other robots [2] [3]. To construct the master-slave system communication module, we choose the XBee module based on ZigBee technology [4]. XBee is the brand name of a family of form factor compatible radio module from Digi International. The first XBee radios were introduced under the MaxStream brand in 2005 and were based on the IEEE 802.15.4-2003 standard designed for point-to-point and star communications at over-the-air baud rates of 250 Kbit/s. The XBee radios can be used with the minimum number of connections [5] [6].
Existing multi-robot cooperative communication solution can be mainly classified into two categories, point to point communication and point to multi-point communication [7]. According to the information shared between robots, these two kinds of communication methods will be used to solve different problems, such as computer-robot control and teams of multiple robots information communication. These devices can form into the wireless network [8]-[10].
According to the function of the device in the network, download the program at first; the function of the coordinator is to search the network through the scanner [11]. In order to find an unused channel to start a network. The function of a router is to search through a scanner and find an active channel connect it, and then allow other devices connected. The function of the terminal device is always trying to connect an existing network, searching for other devices in the network, terminal device can also provide a completed network, and permit other devices initialized in the network service [12][13].
Based on the spherical robot research, a new concept was put forward. A spherical amphibious robot can not only swims in the water but also can walk on land, and achieve barrier-free travel. On the land, or under rivers, lakes, sea environment, the robots have some functions such as data acquisition, signal transceiver [14], etc.
According to the proposed new control concept, we can emphasis on the ZigBee control signal. And the prototype of this control method shown in the Fig.1.

Fig.1 The structure of multi-robots cooperative control method.
It describes the master spherical amphibious robot control
two slave robots, each of slave robots received control signal at the same time, and execute the order, which sent from the master robot. And we can also construct teams by using multi-robot cooperative control system [15].
II. HARDWARE DESIGN FOR THE ROBOT
This section mentioned about control system structure includes the following several aspects, PC software, robot controller, communication modules, and software supported. The transmit part can be PC which installed control software and it can send control orders. The receive part in the multi spherical amphibious robot group contains robot micro-controller, signal receiving modules, battery, and walking part. Multi spherical amphibious robots are assembled by many individual modules. The specification of spherical amphibious robot is explained in this section. Fig 2 shows the single robot with its robot controller, in this prototype we can roughly see this robot clearly.
Fig. 2 Modules of the spherical amphibious robot.
Fig.3 The functional block diagram of multi-robots cooperative control system.
Fig. 3 shows the prototype of signal transmission. We proposed a new concept for spherical amphibious robot, the advantage of the master-slave robot structure is that the robots can be divided into different groups, each group separately perform different tasks, each of the slave robot receive the order sent from the master robot, after received the command from the master robot, slave robot groups perform different tasks.
A. The micro-controller of the spherical amphibious robot
The spherical amphibious robot has several components, include AVR ATmega2560, water-jet propellers, servo motors, battery module etc. AVR ATmega2560 is selected for the micro-controller of the spherical robot, which can control eight motors and four water-jet propellers. The micro-controller has eight PWM signals for controlling servo motor to realize walking motion on land, another four PWM signals are used to control the water-jet propellers [16]-[18].
Fig 4 shows separated modules in the structure of the system. We use micro-controller Atmega2560 (Fig.4 a) to control the spherical amphibious robot, sending and receiving communication signal by using XBee communication module (Fig.4 b), and modifying the voltage by using LM2596 module (Fig.4 c), finally, we use a separate battery to give power to the robot.
(a): Atmega 2560 (b): XBee communication module and (c): LM2596 voltage modify module.
Fig. 4 Spherical amphibious robot hardware
With the process of signal transmission in electronic communication, a signal must be collected and then loaded to the sending device. Therefore, single robot needs to coordinate with each other, between multiple robots to avoid conflict. When a single robot cannot complete one task, multiple robots are required to complete the task through the collaboration. At this time, the multiple robot coordination tasks will include the communication modules among robots. The multiple robots’ main problem is how to organize the cooperative teams, in order to complete the tasks.
B. The actuators of the spherical amphibious robot
The spherical amphibious robot has eight servo motors for the movement. Twice of the servo motors assemble one leg, so the robot has four legs. Driving system of spherical amphibious robot allows it to move forward, backward and do some other activation [19].
Spherical amphibious robot is composed of four drive devices, each driving device has two waterproof steering gears, a support joint, a U type steering bracket. The output PWM duty ratio can control the motion in the horizontal direction and the vertical direction of the spherical amphibious robot. Land movement, steering control in the horizontal direction determines the robot leg step size, servo motor control leg lift height in the vertical direction, horizontal direction of interaction [20] [21].
C. The communication module of the spherical amphibious
robot In multi robot system for the spherical amphibious robot,
the most important part of the robot control is how to communicate with other robots. In the robot control system, robots coordination is refer to the multi-robot communication. When complete some collective activities, this function aim to adapt to the environment. Due to changes varied, the robot's recognition is incomplete, and it is also very limited system resources sharing, between the robot and the environment, that may create many conflicts among the robot and robot system, which cannot operation normally and orderly.
In order to solve these problems, we present a method that to assemble a mash between robots we propose to use XBee module to accomplish this problem. XBee is based on the technology of ZigBee MaxStream Company in the United States, the module is simple to use, we need to put the protocol into the module, and then the data will automatically be sent to the other wireless connection. Fig. 5 shows the XBee module prototype.
Fig.5 XBee module
Arduino XBee module includes a customized extension develop board for the Arduino XBee chip. Using such a pair of Arduino XBee modules, we can realize a ZigBee network among robots [22]. ZigBee technology itself also support a complex network composed of multiple nodes. XBee module in the normal work must be conducted before the corresponding setting. We use the serial communication port to transmit control protocol to XBee module through X-CTU application [23]. According to Table 1, we can clearly see the specifications of XBee module.
TABLE I THE FEATURES OF XBEE AND XBEE-PRO MODULE
XBee XBee-Pro
High Performance
Low Cost
Indoor : up to 30m Outdoor :up to 100m
Transmit power : 1mw
Receiver sensitivity: -92dBm
Indoor : up to 100m Outdoor : up to 1500m
Transmit power : 100mw
Receiver sensitivity: -100dBm
Lower Power
TX Current: 45mA RX Current: 50mA
Power-down: Current<10 A
TX Current: 215mA RX Current: 55mA
Power-down: Current<10 A
D. The Power Management
The power supplement of the spherical amphibious robot equipment is a lithium-ion battery. Lithium-ion polymer battery adopted by the input voltage is DC-12.6 V, output voltage of Lithium-ion battery is DC-10.8 V to DC-12.4 V. Batteries are able to bear power capacity is 9800mah.The size of the battery is 115 mm * 21 mm *60 mm. We use two batteries like this one. The first one can supply the power of micro-controller and communication module, this part of battery is most important, because we should turn on this battery first, and then turn on the other one, in case of program mistaken. The other one supply the 8 servo motors.
III. CONTROL STRUCTURE OF THE SPHERICAL AMPHIBIOUS ROBOT
For multiple robots interaction, communication between robots is important to carry out significant task where one robot delivers orders or transmit control signal to other robots. We use XBee communication modules, by using ZigBee communication protocol, it is possible to interface one device to other device. The advantage of communication between the robots is completing the task in efficient way. Wireless network which is based on 802.15.4 standards and use some technologies such as Infrared, Wireless USB, Bluetooth, and ZigBee for communication between sensors and electronic devices [24].
A ZigBee network mesh
Inductive communication is one of the methods for multi-spherical amphibious robots. Fig.6 shows the ZigBee mesh for multi-robot cooperative control method. The master robot sends the control information to the slave robots.
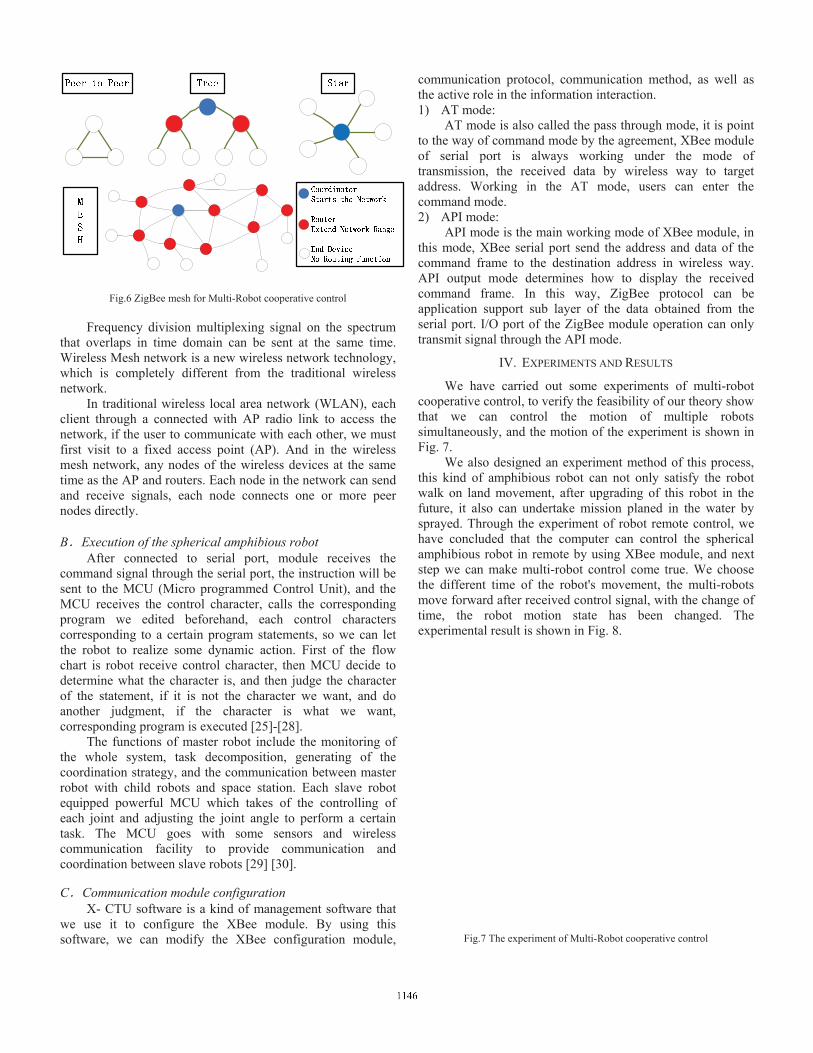
Fig.6 ZigBee mesh for Multi-Robot cooperative control
Frequency division multiplexing signal on the spectrum
that overlaps in time domain can be sent at the same time. Wireless Mesh network is a new wireless network technology, which is completely different from the traditional wireless network.
In traditional wireless local area network (WLAN), each client through a connected with AP radio link to access the network, if the user to communicate with each other, we must first visit to a fixed access point (AP). And in the wireless mesh network, any nodes of the wireless devices at the same time as the AP and routers. Each node in the network can send and receive signals, each node connects one or more peer nodes directly.
B Execution of the spherical amphibious robot
After connected to serial port, module receives the command signal through the serial port, the instruction will be sent to the MCU (Micro programmed Control Unit), and the MCU receives the control character, calls the corresponding program we edited beforehand, each control characters corresponding to a certain program statements, so we can let the robot to realize some dynamic action. First of the flow chart is robot receive control character, then MCU decide to determine what the character is, and then judge the character of the statement, if it is not the character we want, and do another judgment, if the character is what we want, corresponding program is executed [25]-[28].
The functions of master robot include the monitoring of the whole system, task decomposition, generating of the coordination strategy, and the communication between master robot with child robots and space station. Each slave robot equipped powerful MCU which takes of the controlling of each joint and adjusting the joint angle to perform a certain task. The MCU goes with some sensors and wireless communication facility to provide communication and coordination between slave robots [29] [30].
C Communication module configuration
X- CTU software is a kind of management software that we use it to configure the XBee module. By using this software, we can modify the XBee configuration module,
communication protocol, communication method, as well as the active role in the information interaction. 1) AT mode:
AT mode is also called the pass through mode, it is point to the way of command mode by the agreement, XBee module of serial port is always working under the mode of transmission, the received data by wireless way to target address. Working in the AT mode, users can enter the command mode. 2) API mode:
API mode is the main working mode of XBee module, in this mode, XBee serial port send the address and data of the command frame to the destination address in wireless way. API output mode determines how to display the received command frame. In this way, ZigBee protocol can be application support sub layer of the data obtained from the serial port. I/O port of the ZigBee module operation can only transmit signal through the API mode.
IV. EXPERIMENTS AND RESULTS
We have carried out some experiments of multi-robot cooperative control, to verify the feasibility of our theory show that we can control the motion of multiple robots simultaneously, and the motion of the experiment is shown in Fig. 7.
We also designed an experiment method of this process, this kind of amphibious robot can not only satisfy the robot walk on land movement, after upgrading of this robot in the future, it also can undertake mission planed in the water by sprayed. Through the experiment of robot remote control, we have concluded that the computer can control the spherical amphibious robot in remote by using XBee module, and next step we can make multi-robot control come true. We choose the different time of the robot's movement, the multi-robots move forward after received control signal, with the change of time, the robot motion state has been changed. The experimental result is shown in Fig. 8.
Fig.7 The experiment of Multi-Robot cooperative control
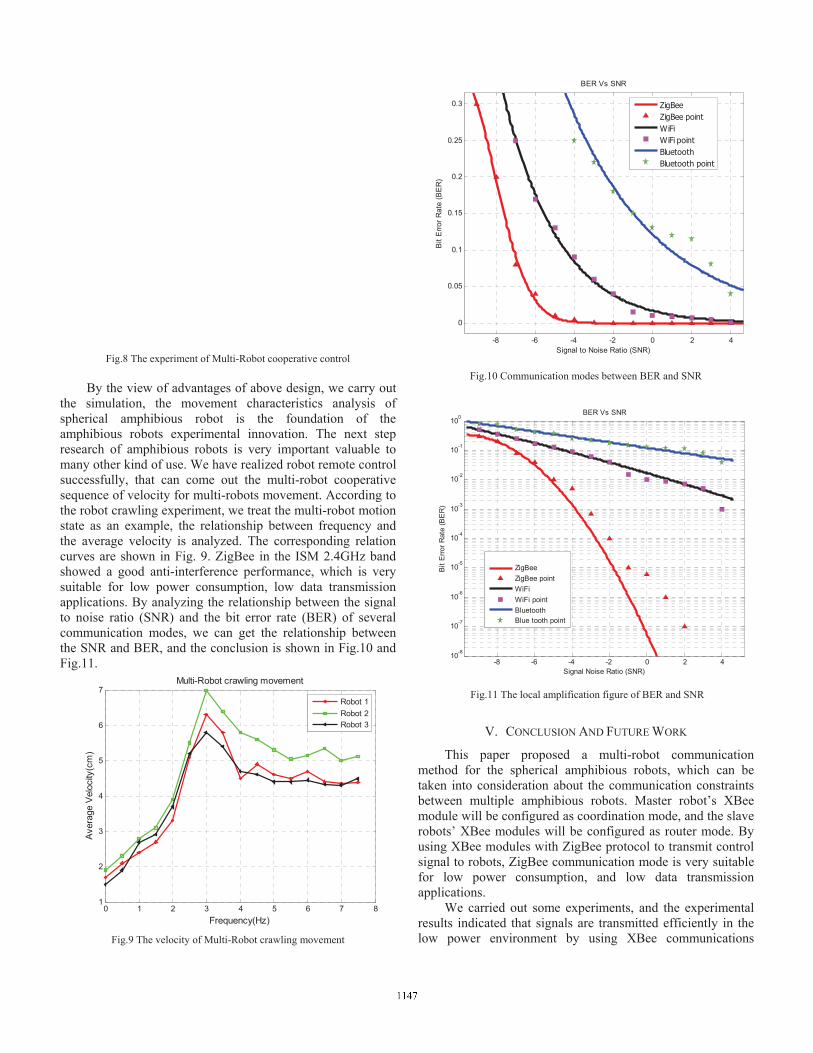
Fig.8 The experiment of Multi-Robot cooperative control
By the view of advantages of above design, we carry out
the simulation, the movement characteristics analysis of spherical amphibious robot is the foundation of the amphibious robots experimental innovation. The next step research of amphibious robots is very important valuable to many other kind of use. We have realized robot remote control successfully, that can come out the multi-robot cooperative sequence of velocity for multi-robots movement. According to the robot crawling experiment, we treat the multi-robot motion state as an example, the relationship between frequency and the average velocity is analyzed. The corresponding relation curves are shown in Fig. 9. ZigBee in the ISM 2.4GHz band showed a good anti-interference performance, which is very suitable for low power consumption, low data transmission applications. By analyzing the relationship between the signal to noise ratio (SNR) and the bit error rate (BER) of several communication modes, we can get the relationship between the SNR and BER, and the conclusion is shown in Fig.10 and Fig.11.
0 1 2 3 4 5 6 7 81
2
3
4
5
6
7Multi-Robot crawling movement
Frequency(Hz)
Ave
rage
Vel
ocity
(cm
)
Robot 1Robot 2Robot 3
Fig.9 The velocity of Multi-Robot crawling movement
-8 -6 -4 -2 0 2 4
0
0.05
0.1
0.15
0.2
0.25
0.3
Signal to Noise Ratio (SNR)
Bit
Erro
r Rat
e (B
ER
)
BER Vs SNR
ZigBeeZigBee pointWiFiWiFi pointBluetoothBluetooth point
Fig.10 Communication modes between BER and SNR
-8 -6 -4 -2 0 2 410-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100BER Vs SNR
Signal Noise Ratio (SNR)
Bit
Erro
r Rat
e (B
ER
)
ZigBeeZigBee pointWiFiWiFi pointBluetoothBlue tooth point
Fig.11 The local amplification figure of BER and SNR
V. CONCLUSION AND FUTURE WORK
This paper proposed a multi-robot communication method for the spherical amphibious robots, which can be taken into consideration about the communication constraints between multiple amphibious robots. Master robot’s XBee module will be configured as coordination mode, and the slave robots’ XBee modules will be configured as router mode. By using XBee modules with ZigBee protocol to transmit control signal to robots, ZigBee communication mode is very suitable for low power consumption, and low data transmission applications.
We carried out some experiments, and the experimental results indicated that signals are transmitted efficiently in the low power environment by using XBee communications

module, and ZigBee technology relies upon IEEE 802.15.4, which has excellent performance in low SNR environments. This communication system is very suitable in the low power environment, and the multi-robot cooperative wireless communication system can be used to underwater detection and environmental reconnaissance and military defense, etc.
In the future research work, we will improve the control mode of the robot, as well as the relevant underwater control experiments, and adjust the robot cooperative communication method to realize a better wireless communication control system.
ACKNOWLEDGMENTS
This research is partly supported by National Natural Science Foundation of China (61375094), Key Research Program of the Natural Science Foundation of Tianjin (13JCZDJC26200), and National High Tech. Research and Development Program of China (No.2015AA043202).
REFERENCES [1] Michael Novitzky, Charles Pippin, Thomas R. Collins, Tucker R. Balch
and Michael E. West, “Bio-Inspired Multi-Robot Communication through Behavior Recognition,” Proceedings of International Conference on Robotics and Biomimetic, Guangzhou, China, pp.771-776, 2012.
[2] J.H.Li, J.T.Kim, M.J.Lee, H.J.Kang, “Conceptual Design of Optimal Thrust System for Efficient Cable Burying of ROV Trencher,” R&D Center for Underwater Construction Robotics, KIMST, Korea, 2014.
[3] Nima Harsamizadeh Tehrani, Mahdi Heidari,etc, “Developlent, Depth Control and Stability Analysis of an Underwater Remotely Operated Vehicle(ROV)” Proceedings of IEEE International Conference on Control and Automation, Vol 2, pp.814-819, June 9-11.2011.
[4] T. H. Y. Ling,L. J. Wong,J. E. H. Tan,C. K. Lee, “XBee Wireless Blood Pressure Monitoring System with Microsoft Visual Studio Computer Interfacing” Intelligent Systems, Modelling and Simulation (ISMS), Proceedings of 2015 6th International Conference on, pp.5-9, 9-12 Feb. 2015.
[5] Z. Yuping, Y. Xiaoling, L. Chen, “Research of the Emergency Communication System in Coal Mine Based on ZigBee Technology,” Proceedings of 2015 Seventh International Conference on Advanced Communication and Networking (ACN), pp.60-63, 8-11 July 2015.
[6] Chunfeng Yue, Shuxiang Guo, Liwei Shi, “Design and Performance Evaluation of a Biomimetic Microrobot for the Father-son Underwater Intervention Robotic System,” Microsystem Technologies, Vol 22, No. 4, 2015.
[7] A. Eriksson E,B. Ohlman,K. Å Persson,A. M. Malik, “Scalable point-to-multipoint communication for cloud networking using information-centric networking,” Proceedings of Consumer Communications and Networking Conference (CCNC), 2015 12th Annual IEEE, pp.654-662,9-12 Jan. 2015.
[8] N. Uchida,K. Takahata ; Y. Shibata, “Evaluation of Cognitive Wireless Networks in Rural Area for Disaster Information Network,” Computational Science and Its Applications (ICCSA),pp.135-142, 20-23 June 2011.
[9] Liguo Li, Jian Guo, Shuxiang Guo, “Characteristic Evaluation on Land for a Novel Amphibious Spherical Robot,” Proceedings of 2015 IEEE International Conference on Mechatronics and Automation, pp.1100-1105, August 2-5, Beijing, China, 2015.
[10] Lin Bi, Jian Guo, Shuxiang Guo, “Virtual Prototyping Technology-based Dynamics Analysis for an Amphibious Spherical Robot,” Proceedings of the 2015 IEEE International Conference on Information and Automation, pp.2563-2568, Beijing, China, August 2015.
[11] J. Wu, G. Huang, “Simulation study based on QoS schemes for IEEE 802.11,” Advanced Computer Theory and Engineering (ICACTE), pp. V6-534 - V6-538, 20-22 Aug. 2010.
[12] A. Alvarez, “Volumetric Reconstruction of Oceanographic Fields Estimated from Remote Sensing and In Situ Observations from Autonomous Underwater Vehicles of Opportunity,” IEEE Journal of Oceanic Engineering, pp12-24, Jan. 2011.
[13] P. Norgren, M. Ludvigsen, T. Ingebretsen,V. E. Hovstein “Tracking and remote monitoring of an autonomous underwater vehicle using an unmanned surface vehicle in the Trondheim fjord,” OCEANS 2015 - MTS/IEEE Washington, pp.1-6. 19-22 Oct. 2015.
[14] S. M. Rajeshkumar M. S. Habibmiya “Wireless data acquisition system using the fusion of ZigBee technology and LabVIEW,” Convergence of Technology (I2CT), pp.1-6, 6-8 April 2014.
[15] A. Sumarudin T. Adiono W. P. Putra, “Flexible and reconfigurable system on chip for wireless sensor network,” Information Technology Systems and Innovation (ICITSI), pp.230-234 24-27 Nov. 2014.
[16] H. Hongsheng L. Weiguo. “Instantaneous torque ripple control in brushless DC motors based on conduction PWM duty ratio,” Proceedings of Control Conference (CCC), pp.4313-4318 28-30 July 2015.
[17] Chunfeng Yue, Shuxiang Guo and Liwei Shi, “Hydrodynamic Analysis of the Spherical Underwater Robot SUR-II,” International Journal of Advanced Robotic Systems, Vol.10, pp.1-12, 2013.
[18] Shaowu Pan, Liwei Shi, Shuxiang Guo, “A Kinect-based Real-time Compressive Tracking System for Amphibious Spherical Robots,” Sensors, Vol.15, No.4, pp.8232-3252, 2015.
[19] Yaxin Li, Shuxiang Guo, Chunfeng Yue “Preliminary Concept of a Novel Spherical Underwater Robot, ” International Journal of Mechatronics and Automation,Vol.5, No.1, pp11-21, 2015.
[20] Y. Sang F. Li Y. Dai F. Duan, “The practical control technology design for AC servo motor based on STM32 micro-controller,” Proceedings of 2015 IEEE Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), pp.1-5, 19-20 Dec. 2015.
[21] Yanlin He, Liwei Shi, Shuxiang Guo, Shaowu Pan, Zhe Wang. “Preliminary mechanical analysis of an improved amphibious spherical father robot,” Microsystem Technologies, Springer Verlag, April 19, 2015.
[22] J. H. Biddut, N. Islam M. H. R. Jany A. I. Swapna “Performance Analysis of large scale ZigBee network design through geometric structure,” Electrical Information and Communication Technology (EICT), pp.263-268, 10-12 Dec. 2015.
[23] M. Noushad, B. Tauheed ; S. A. Khan ; M. A. Khan “Wireless monitoring of temperature and humidity using sensor array,” Proceedings of 2015 Annual IEEE India Conference (INDICON), pp.1-5, 17-20 Dec. 2015
[24] T. U. Sane, S. L. Shue,J. M. Conrad, “Implementation of Dynamic Source Routing using 802.15.4 on XBee Series 1 Modules,” SoutheastCon, pp.9-12. April 2015.
[25] Xin Li, Jian Guo, Shuxiang Guo, “OFDM-based Micro-Signal Communication Method for the Spherical Amphibious Underwater Vehicle,” Proceedings of 2015 IEEE International Conference on Mechatronics and Automation, pp.2094-2099, August 2-5,Beijing, China, 2015
[26] Zhendong Zhong, Jian Guo, Shuxiang Guo, Lin Bi, “Characteristic Analysis in Water for an Amphibious Spherical Robot,” Proceedings of 2015 IEEE International Conference on Mechatronics and Automation, pp.2088-2093, August 2-5, Beijing, China, 2015.
[27] Fu Wan, Shuxiang Guo, Xu Ma, Yuehui Ji and Yunliang Wang, “Characteristic Analysis on Land for an Amphibious Spherical Robot,” Proceedings of 2014 IEEE International Conference on Mechatronics and Automation, pp.1945-1950, August 3-6,Tianjin, China, 2014.
[28] Lin Bi, Jian Guo, Shuxiang Guo Zhendong Zhong, “Kinematic Analysis on Land of an Amphibious Spherical Robot System,” Proceedings of 2015 IEEE International Conference on Mechatronics and Automation, pp.2082-2087, August 2-5, Beijing, China, 2015.
[29] Jian Guo, Guoqiang Wu, Shuxiang Guo, “Fuzzy PID Algorithm-based Motion Control for the Spherical Amphibious Robot,” Proceedings of 2015 IEEE International Conference on Mechatronics and Automation, pp.1583-1588, August 2-5, Beijing, China, 2015.
[30] Shuxiang Guo, Yuehui Ji, Lin Bi, Xu Ma and Yunliang Wang, “A Kinematic Modeling of an Amphibious Spherical Robot System,” Proceedings of 2014 IEEE International Conference on Mechatronics and Automation, pp.1951-1956, August 3-6, Tianjin, China, 2014.