sole supports imaging software group 9: edward krei (bme) edward krei (bme) michael galante (compe)...
TRANSCRIPT
Sole Supports Sole Supports Imaging SoftwareImaging Software
Group 9:Group 9:Edward Krei (BME)Edward Krei (BME)Michael Galante (CompE)Michael Galante (CompE)Derrick Snyder (CompE)Derrick Snyder (CompE)Kathryn Yates (BME)Kathryn Yates (BME)Advisor: Matt Moore, Sole Advisor: Matt Moore, Sole SupportsSupports
Project DescriptionProject Description
Sole Supports needs an electronic Sole Supports needs an electronic aide in their current orthotics aide in their current orthotics manufacturing processmanufacturing process
Goal:Goal:– Create a method for 3-Dimensional Create a method for 3-Dimensional
imaging and potentially supporting imaging and potentially supporting software for Sole Supportssoftware for Sole Supports
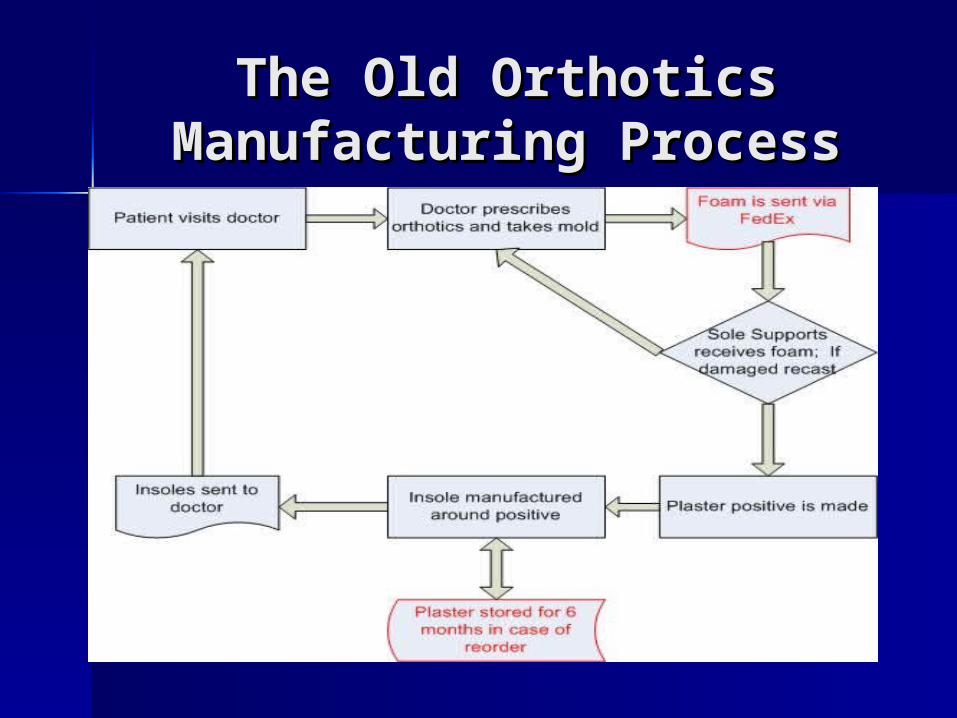
The Old Orthotics The Old Orthotics Manufacturing ProcessManufacturing Process
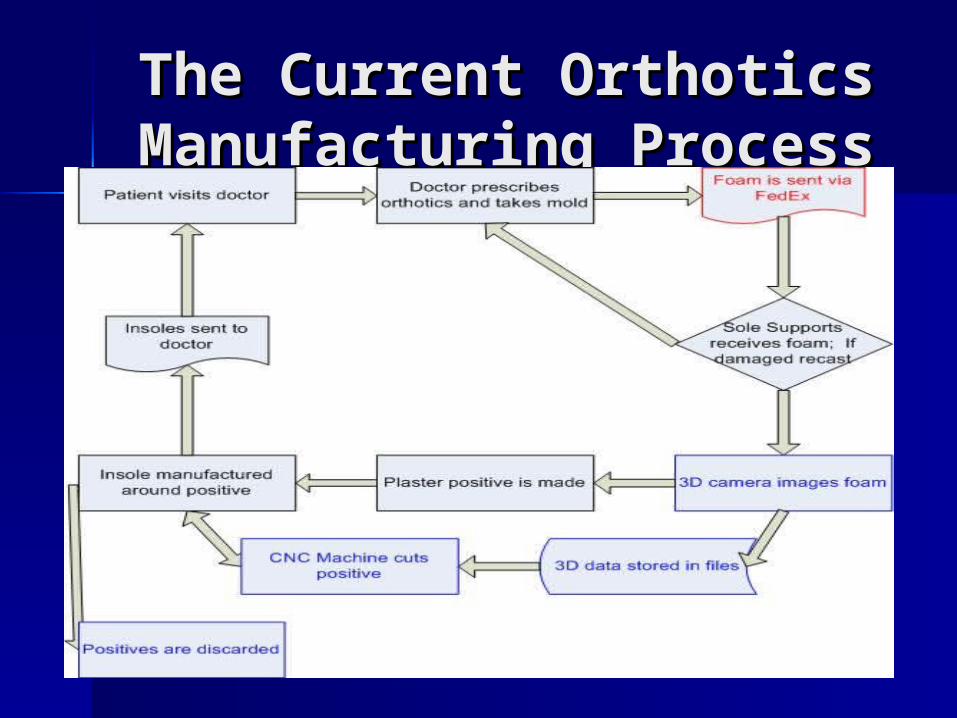
The Current Orthotics The Current Orthotics Manufacturing ProcessManufacturing Process
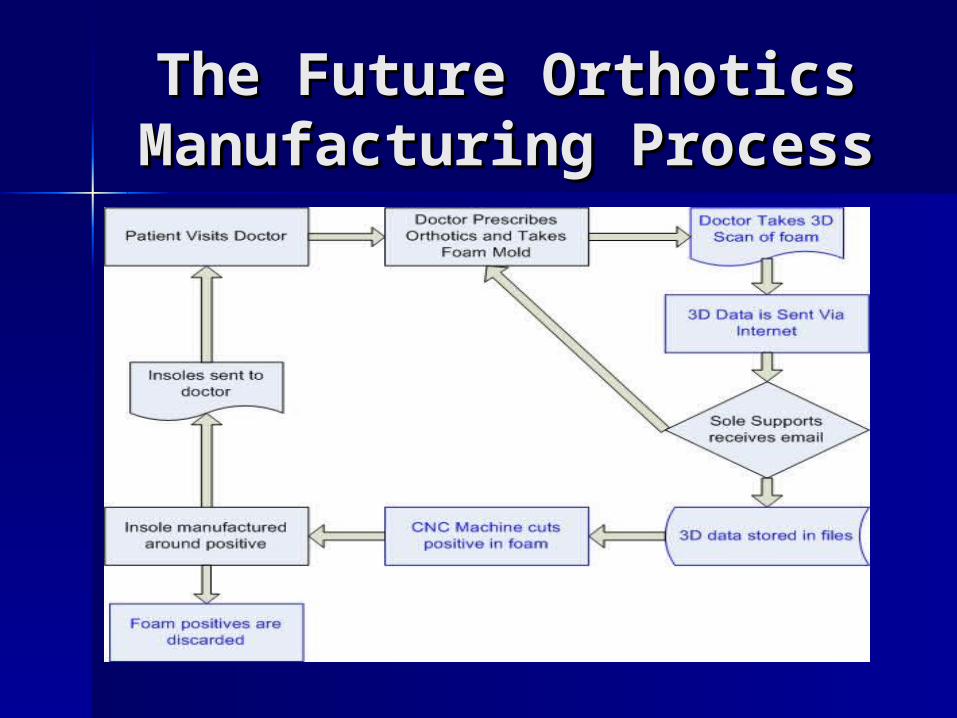
The Future Orthotics The Future Orthotics Manufacturing ProcessManufacturing Process
GoalsGoals
Make a 3-D imaging Make a 3-D imaging device device – Resolution: < 5mmResolution: < 5mm– Accuracy: 95% Accuracy: 95%
within 2mmwithin 2mm– Device Dimensions: Device Dimensions:
< 3ft x 3ft x 3ft < 3ft x 3ft x 3ft– Easy to useEasy to use
Create software Create software programprogram
Overall Cost < $400Overall Cost < $400
Proposed 3-D Imaging Proposed 3-D Imaging Setup SolutionsSetup Solutions
Cameras in Stereo PairsCameras in Stereo Pairs– Algorithm hard to automateAlgorithm hard to automate
Sick® Laser Range FinderSick® Laser Range Finder– Too expensiveToo expensive
Flatbed ScannerFlatbed Scanner– InaccurateInaccurate
DAVID software with Laser DAVID software with Laser Level and CameraLevel and Camera– Meets initial criteriaMeets initial criteria
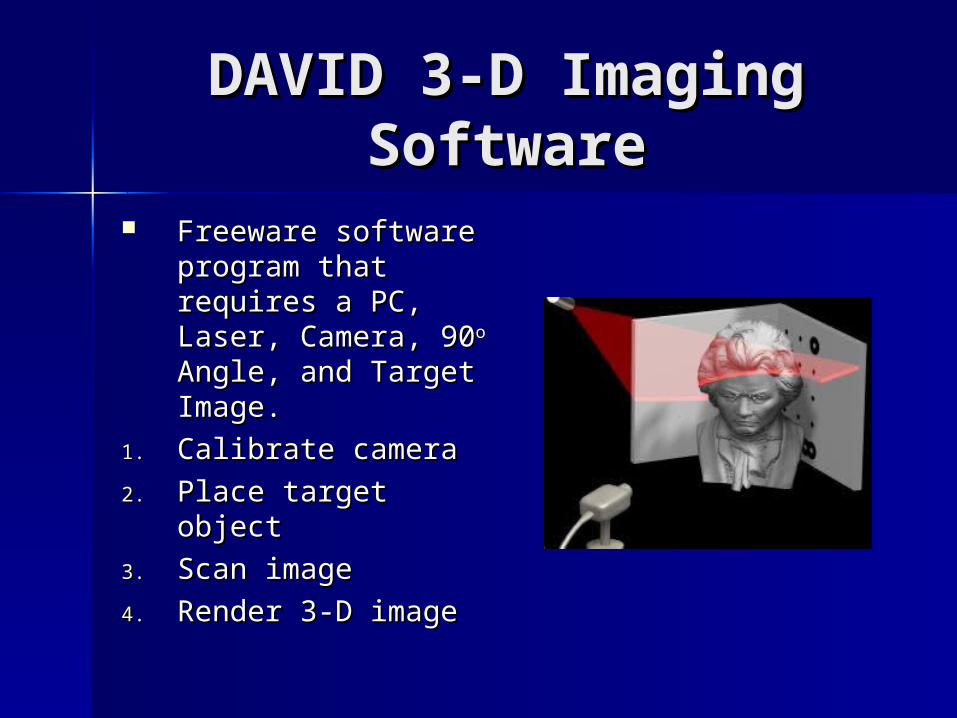
DAVID 3-D Imaging DAVID 3-D Imaging SoftwareSoftware
Freeware software Freeware software program that program that requires a PC, Laser, requires a PC, Laser, Camera, 90Camera, 90o o Angle, Angle, and Target Image.and Target Image.
1.1. Calibrate cameraCalibrate camera
2.2. Place target objectPlace target object
3.3. Scan imageScan image
4.4. Render 3-D imageRender 3-D image
Materials and CostsMaterials and Costs
Logitech QuickCam Pro4000 - $90Logitech QuickCam Pro4000 - $90 Strait-Line X3 Laser Level - $28Strait-Line X3 Laser Level - $28 Right-angle ruler - $3Right-angle ruler - $3 Foam Board - $10Foam Board - $10 Calibration Grid - Included with Calibration Grid - Included with
DAVIDDAVID
Total Spent to date - $131Total Spent to date - $131
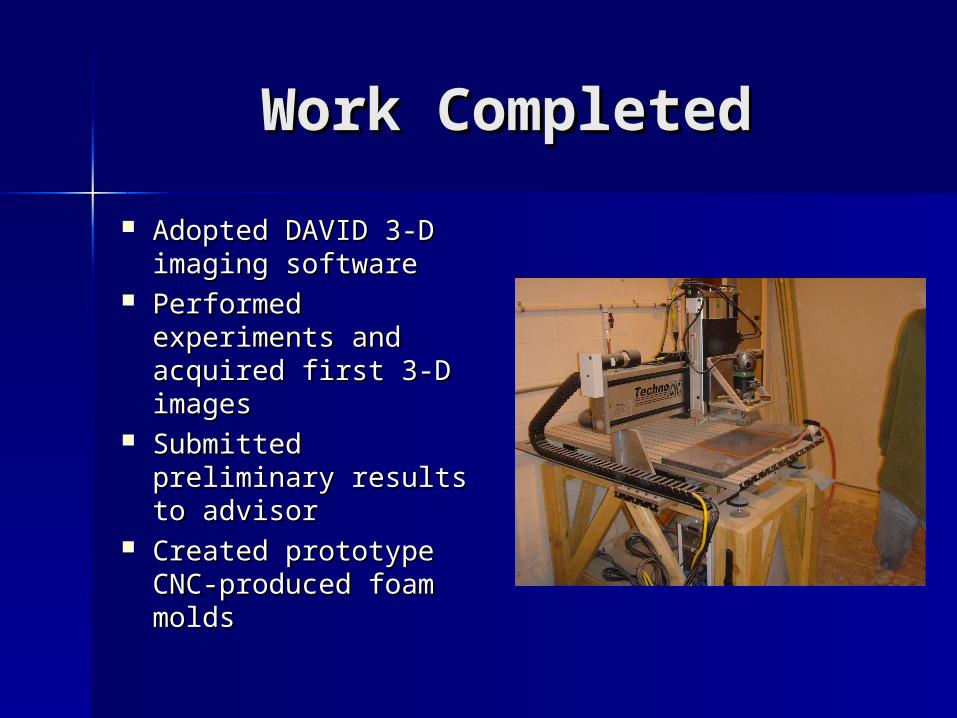
Work CompletedWork Completed
Adopted DAVID 3-D Adopted DAVID 3-D imaging softwareimaging software
Performed Performed experiments and experiments and acquired first 3-D acquired first 3-D imagesimages
Submitted preliminary Submitted preliminary results to advisorresults to advisor
Created prototype Created prototype CNC-produced foam CNC-produced foam moldsmolds
Current WorkCurrent Work
Testing accuracyTesting accuracy Ensuring compatibilityEnsuring compatibility Maintaining correspondence with Maintaining correspondence with
advisoradvisor
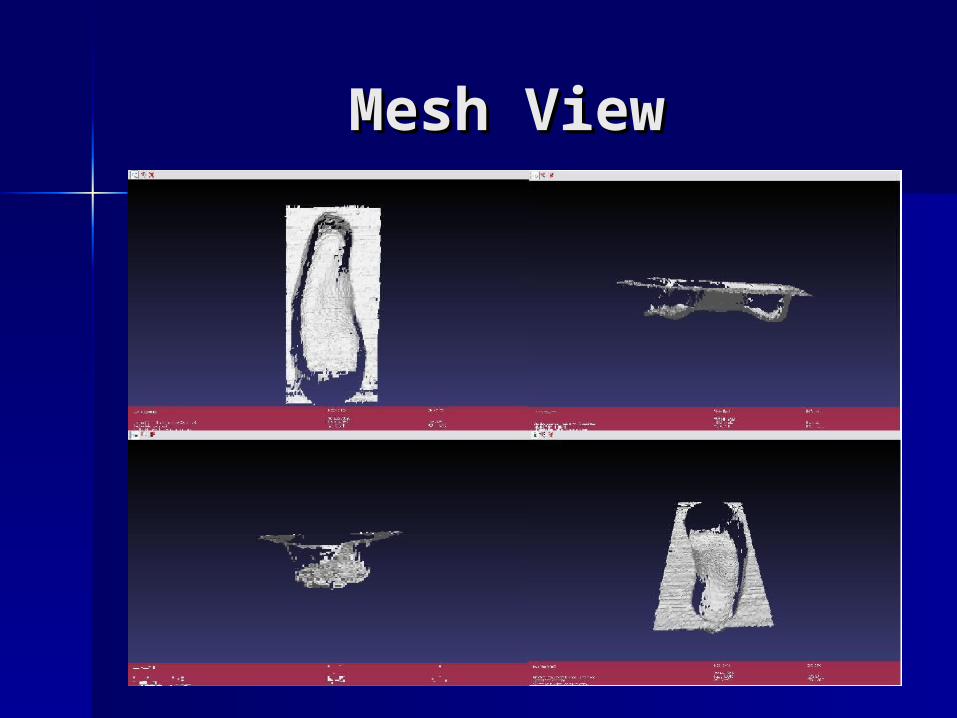
Mesh ViewMesh View
Future WorkFuture Work
Test and optimize accuracy of Test and optimize accuracy of scanningscanning
Create a patient-data software Create a patient-data software interfaceinterface
Construct a casing for a self-Construct a casing for a self-sustained unitsustained unit
ReferencesReferences
Sole Supports, Inc.Sole Supports, Inc.– http://www.solesupports.com/http://www.solesupports.com/
DAVID Official WebsiteDAVID Official Website– http://www.cs.tu-bs.de/rob/http://www.cs.tu-bs.de/rob/
david.htmldavid.html