slide plt (pertemuan 2)
DESCRIPTION
erfffvdvTRANSCRIPT

ASSALAMU ALAIKUM WARAHMATULLAHI
WABARAKATUH

KOMPONEN SISTEM KONTROLKOMPONEN SISTEM KONTROL&&
PENGATURAN LOOP PENGATURAN LOOP TERBUKA/TERTUTUPTERBUKA/TERTUTUP

Sistem Pengaturan adalah hubungan timbal balik antara komponen-komponen yang membentuk suatu konfigurasi sistem yang memberikan suatu hasil yang dikehendaki.Hasil ini dinamakan “respon”
Ditinjau dari segi peralatan, komponen fisis tersubut digunakan untuk mengarahkan aliran energi ke suatu mesin atau proses agar dapat menghasilkan respon yang diinginkan
Sesuai fungsi pengontrolan secara menyeluruh, maka komponen sistem pengaturan dapat dibagi dalam empat kelompok yaitu:1.Sensor/transduser2.Error detector3.Penggerak (Power actuator)4. Penguat (Amplifier)
Sensor digunakan sebagai elemen yang langsung mengadakan kontak dengan yang diukur.
Transduser berfungsi untuk mengubah besaran fisis yang diukur menjadi besaran fisis lainnya. Pada umumnya adalah mengubah besaran-besaran fisis tersebut menjadi besaran listrik; misalnya: tekanan, temperatur, aliran, posisi, dan lain-lain.Error Detector mengukur error (kesalahan) yang terjadi antara keluaran aktual dan keluaran yang diinginkan

Penggerak (Power Actuator)Alat ini berfungsi untuk mengontrol aliran energi ke sistem yang dikontrol. Alat ini disebut juga elemen pengontrol akhir (final control element). Misalnya : motor listrik, katup pengontrol, pompa, silinder, hidraulik, dan lain-lain. Elemen keluaran ini harus mempunyai kemampuan untuk menggerakkan beban ke suatu harga yang diinginkan.
Power Amplifier: Unit ini dibutuhkan karena hampir dalam semua kejadian, daya dari “error detector” tidak cukup kuat untuk menggerakkan elemen keluaran. Karena fungsi pengontrolan adalah untuk mengendalikan keluaran agar kesalahan mendekati nol, maka diperlukan penguat daya (power amplifier) dan ditempatkan diantara “error detector” dan keluaran
Beberapa transduser yang banyak ditemukan dalam sistem pengontrolan adalah:a.Potensiometer
Potensiometer berfungsi mengubah posisi mekanis menjadi sinyal elektris. Potensio meter ini merupakan sebuah tahanan (resistor) yang mempunyai kontak geser sehingga nilai tahanan dapat diatur dari nol sampai maksimum.
Transduser
Dalam servo, gerakan kontak ini dihasilkan oleh perputaran poros (shaft) sehingga setelah potensiometer dialiri arus listrik, terjadi tegangan listrik pada suatu kedudukan kontak
b. ResolverResolver adalah alat yang digunakan untuk keperluan dalam bidang navigasi, radar dan trayektori yang terdapat perhitungan dalam bentuk trigoniometri.

Pada dasarnya resolver adalah sebuah peralatan yang menghasilkan keluaran listrik dalam bentuk fungsi trigoniometri dari suatu sudut masukan. Salah satu jenisnya adalah tipe induksi (induction resolver)

c.Transduser pengukur posisi linearAlat ini digunakan untuk mengukur pergeseran atau posisi, dan bekerja berdasarkan kopling induktif sepanjang garis lurus (gerak linear). Jenis yang paling banyak digunakan adalah:1. LVDT (Linear Variabel Differential
Transformer 2. Inductosyn

d. Tachometer (pengukur putaran)
e. Aselerometer (Acceloremeter)Tranduser ini berfungsi untuk menghasilkan sinyal yang sebanding dengan percepatan linear sepanjang sumbu-sumbu sensitifnya. Aselerometer bekerja berdasarkan hukum Newton II yakni pengukuran percepatan secara tidak langsung melalui pengukuran gaya yang diperlukan untuk mempercepat suatu massa tertentu.
f. Strain-gage untuk mengukur kondisi gaya atau beban dalam alat-alat mesin, pipa, struktur dsb.
g. Termokopel digunakan untuk mengukur temperatur berdasarkan pengubahan temperatur menjadi sinyal listrik
Tujuan utama dari suatu sistem pengaturan/ pengontrolan yaitu untuk mendapatkan optimisasi dimana hal ini didapatkan berdasarkan fungsi daripada sistem kendali/kontrol itu sendiri, yaitu: pengukuran (measurement), membandingkan (comparison), pencatatan dan perhitungan (computation) dan perbaikan (correction) Terdapat kelompok sistem pada pengaturana. Sistem pengaturan loop terbuka dan loop tertutupb. Secara manual dan automatikc. Kontinyu (analog) dan diskontinyu (digital)

Sistem pengaturan loop terbuka yaitu suatu sistem yang keluarannya tidak mempunyai pengaruh terhadap aksi kontrol. Atau suatu sistem pengaturan loop terbuka keluarannya tidak dapat digunakan sebagai perbandingan umpan balik dengan masukan.
Loop Terbuka
PROSESMasukan
Luaran
Faktor penting : waktu
Kelebihan:- konstruksinya sederhana dan perawatannya mudah- lebih murah- tidak ada persoalan kestabilan- cocok untuk keluaran yang sukar diukur /tidak ekonomis (contoh: untuk mengukur kualitas keluaran pemanggang roti)
Kelemahan:- gangguan dan perubahan kalibrasi- untuk menjaga kualitas yang diinginkan perlu kalibrasi ulang dari waktu ke waktu

Sistem kontrol loop tertutup yaitu sistem pengendalian dimana besaran keluaran memberikan efek terhadap besaran masukan sehingga besaran yang dikontrol dapat dibandingkan terhadap harga yang diinginkan melalui alat pencatat (indikator / sensor). Selanjutnya perbedaan harga yang terjadi antara besaran yang dikontrol dan penunjukan alat pencatat digunakan sebagai koreksi yang pada gilirannya akan merupakan sasaran pengaturan.
Loop Tertutup

Pengukuran
Perbandingan Pengatur Proses
Keluaran
Input / Tanggapan
keluaran yang diharapkan
Input/masukan : harga yang diinginkanKeluaran: harga yang sebenarnya (respon)

100%
50%
100%
50%
Controller
Katup PneumatikKatup/Keran
sensor
Pada contoh ini manusia sebagai operator/pengontrol/controller mengatur level cairan dalam tangki pada posisi 100%, selama level belum tercapai keran tidak akan ditutup penuh. Aksi kontrol/tindakan yang akan diberikan bergantung bila masih terdapat selisih antara input dan output dan akan berhenti bila selisih sama dengan nol (error = 0).Aksi kontrol semacam ini disebut aksi kontrol lup tertutup (close loop control) karena balikan dari keluaran (level tangki yang tercapai) untuk perbandingan dengan input (level tangki yang diinginkan) agar terjadi aksi kontrol terjadi melalui manusia sebagai operator, sehingga sering disebut juga sebagai Manual Feedback Control.Pada model kontrol semacam ini, output mempunyai pengaruh lansung terhadap aksi kontrol yang akan diberikan.
Keuntungan sistem loop tertutup adalah adanya pemanfaatan nilai umpan balik yang dapat membuat respon sistem kurang peka terhadap gangguan eksternal dan perubahan internal pada parameter sistem
Kerugiannya adalah tidak dapat mengambil aksi perbaikan terhadap suatu gangguan sebelum gangguan tersebut mempengaruhi nilai prosesnya.
● Tingkah laku alat kontrol/pengontrol bereaksi terhadap suatu sinyal kesalahan (sinyal error) merupakan suatu indikasi dari cara pengontrolan.
● Pengontrol proses adalah komponen-komponen sistem kontrol yang pada dasarnya memiliki sebuah masukan berupa sinyal error(sinyal kesalahan), yaitu selisih antara sinyal dengan nilai yang diinginkan dan sinyal umpan balik,
.
● Cara bagaimana pengontrol bereaksi terhadap perubahan dikenal sebagai mode kontrol.

●Kontrol On – Off merupakan mode kontrol yang sederhana dan murah, dan sering kali digunakan dimana osilasi dapat direduksi hingga level yang dapat diterima.
●Pada pengontrolan On-Off, peralatan koreksi akhir hanya mempunyai dua tingkat posisi atau tingkat operasi. Dengan alasan ini kontrol on-off juga dikenal dengan sebutan kontrol dua posisi
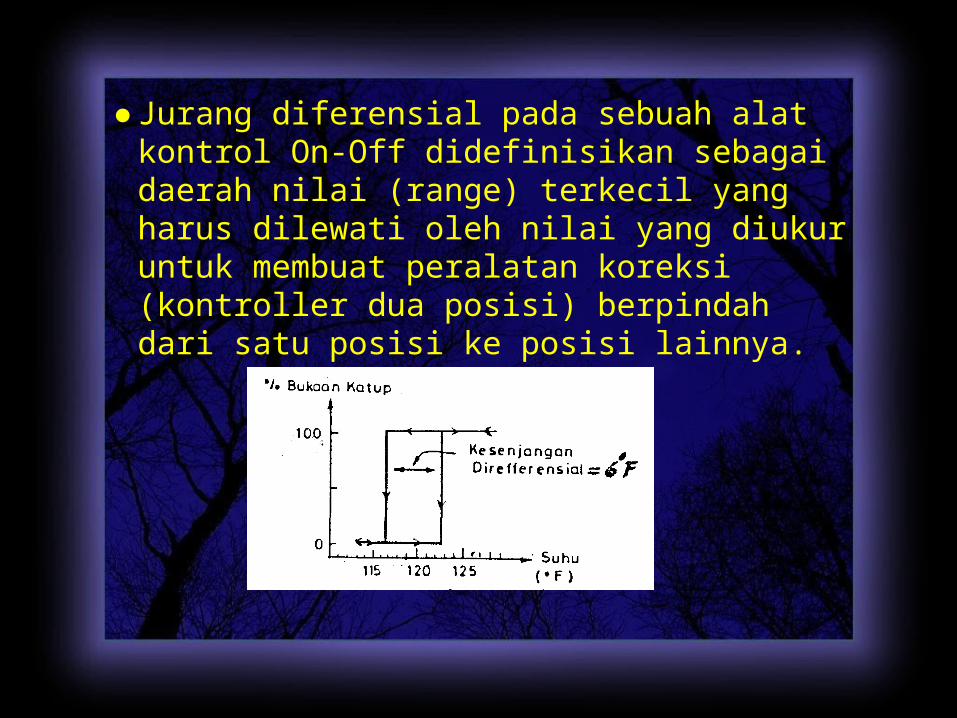
● Jurang diferensial pada sebuah alat kontrol On-Off didefinisikan sebagai daerah nilai (range) terkecil yang harus dilewati oleh nilai yang diukur untuk membuat peralatan koreksi (kontroller dua posisi) berpindah dari satu posisi ke posisi lainnya.