silniki prądu stałego a5 - ceko.com.plceko.com.pl/pdfy/silniki_dc.pdf · silniki prądu stałego...
TRANSCRIPT

Silniki
prądu stałegoKatarzyna
Będzin kwiecień 2000
2
Spis treści
Wstęp ...................................................................................31. Budowa silnika prądu stałego..........................................4
1.1. Budowa stojana ......................................................51.2. Budowa wirnika .....................................................71.3. Budowa komutatora ...............................................81.4. Budowa układu szczotkowego ...............................91.5. Zjawisko komutacji ..............................................101.6. Zasada działania silnika prądu stałego..................11
2. Silnik bocznikowy prądu stałego...................................142.1. Charakterystyki ....................................................152.2. Rozruch i regulacja prędkości ..............................172.3. Zastosowanie........................................................19
3. Silnik szeregowy ...........................................................223.1. Charakterystyki ....................................................233.2. Rozruch i regulacja ..............................................253.3. Zastosowanie........................................................26
4. Silnik szeregowo-bocznikowy.......................................284.1. Charakterystyki ....................................................294.2. Rozruch i regulacja ..............................................30
5. Silnik obcowzbudny......................................................31Wnioski..............................................................................34Literatura............................................................................35Spis rysunków....................................................................36
3
Wstęp
Silniki prądu stałego charakteryzują się dobrymi właści-wościami ruchomymi, przy czym szczególnie korzystne są:duży zakres regulacji prędkości obrotowej i duży momentrozruchowy. Dzięki temu silniki te znajdują coraz szerszezastosowanie w układach napędowych, zwłaszcza od czasurozpowszechniania się przekształtników tyrystorowych.
W zależności od sposobu połączenia uzwojenia wzbu-dzającego rozróżniamy silniki samowzbudne: bocznikowe,szeregowe i szeregowo-bocznikowe oraz silniki obcow-zbudne. Każdy z nich charakteryzuje się innymi właściwo-ściami ruchowymi.
Najczęściej są stosowane następujące silniki prądu stałe-go:- silnik obcowzbudny - umożliwiający sterowanie prędko-
ści w bardzo szerokich granicach oraz automatyzacje pro-cesu sterowania w sposób praktycznie dowolny,
- silnik szeregowy - rozwijający duży moment o przebiegubardzo dogodnym dla trakcji elektrycznej i napędówdźwignic,
- silnik bocznikowy - który ma dobre właściwości regula-cyjne,
- silnik szeregowo - bocznikowy - który łączy w sobie ce-chy silnika szeregowego i bocznikowego.
4
1. Budowa silnika prądu stałego
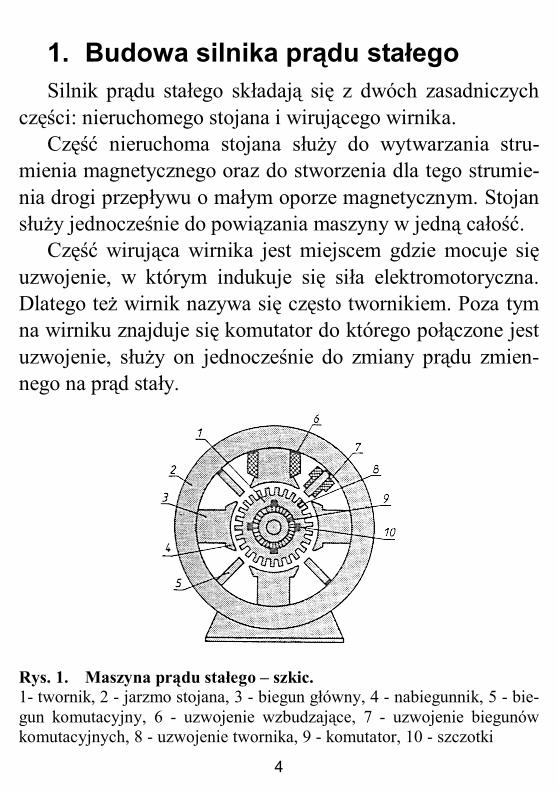
Silnik prądu stałego składają się z dwóch zasadniczychczęści: nieruchomego stojana i wirującego wirnika.
Część nieruchoma stojana służy do wytwarzania stru-mienia magnetycznego oraz do stworzenia dla tego strumie-nia drogi przepływu o małym oporze magnetycznym. Stojansłuży jednocześnie do powiązania maszyny w jedną całość.
Część wirująca wirnika jest miejscem gdzie mocuje sięuzwojenie, w którym indukuje się siła elektromotoryczna.Dlatego też wirnik nazywa się często twornikiem. Poza tymna wirniku znajduje się komutator do którego połączone jestuzwojenie, służy on jednocześnie do zmiany prądu zmien-nego na prąd stały.
Rys. 1. Maszyna prądu stałego – szkic.1- twornik, 2 - jarzmo stojana, 3 - biegun główny, 4 - nabiegunnik, 5 - bie-gun komutacyjny, 6 - uzwojenie wzbudzające, 7 - uzwojenie biegunówkomutacyjnych, 8 - uzwojenie twornika, 9 - komutator, 10 - szczotki
5
Na wirniku znajduje się jeszcze wentylator służący dowytwarzania strumienia powietrza przepływającego przezmaszynę i chłodzącego ją. Natomiast w stojanie znajduje sięjeszcze układ szczotkowy umożliwiający zamocowanieszczotek, które ślizgają się po powierzchni wirującego ko-mutatora i umożliwiają przepływ prądu między ruchomymstojanem a wirującym wirnikiem.
1.1. Budowa stojana
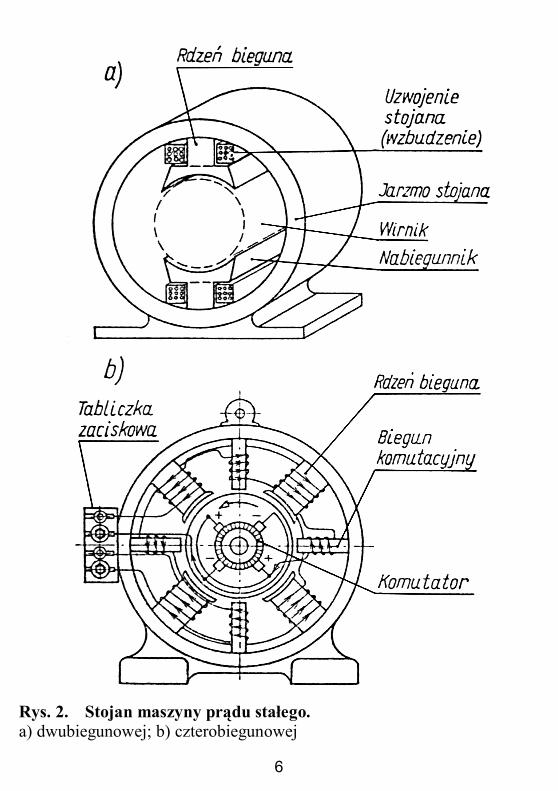
Stojan najczęściej jest magneśnicą, gdyż w nim jestwytwarzane pole magnetyczne. W skład nieruchomego sto-jana wchodzą następujące elementy: jarzmo, bieguny głów-ne zuzwojeniem wzbudzającym, bieguny pomocnicze (ko-mutacyjne) z uzwojeniem, tarcze łożyskowe i trzymadłaszczotkowe.
Jarzmo stojana będące najczęściej odlewem żeliwnymlub staliwnym, spełnia dwie role: jednocześnie jest częściąobwodu magnetycznego i elementem konstrukcyjnym speł-niającym rolę kadłuba, do którego są przymocowane pozo-stałe elementy wchodzące w skład stojana.
6
Rys. 2. Stojan maszyny prądu stałego.a) dwubiegunowej; b) czterobiegunowej
7
1.2. Budowa wirnika
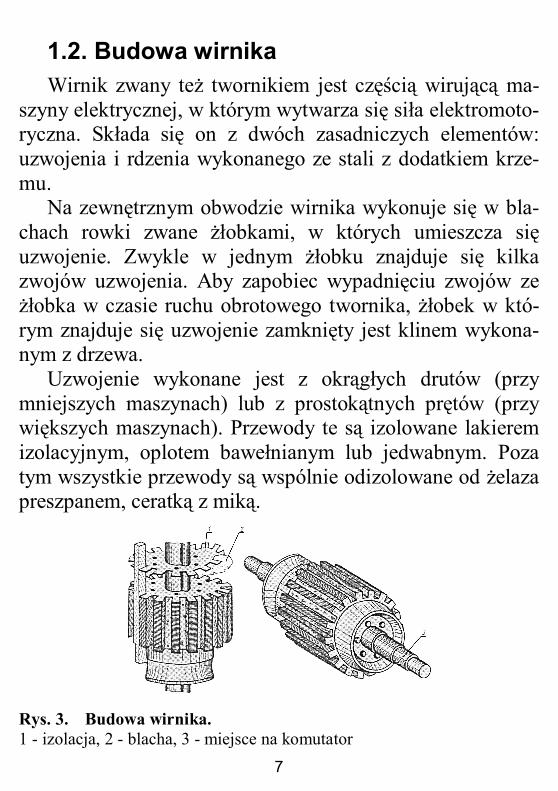
Wirnik zwany też twornikiem jest częścią wirującą ma-szyny elektrycznej, w którym wytwarza się siła elektromoto-ryczna. Składa się on z dwóch zasadniczych elementów:uzwojenia i rdzenia wykonanego ze stali z dodatkiem krze-mu.
Na zewnętrznym obwodzie wirnika wykonuje się w bla-chach rowki zwane żłobkami, w których umieszcza sięuzwojenie. Zwykle w jednym żłobku znajduje się kilkazwojów uzwojenia. Aby zapobiec wypadnięciu zwojów zeżłobka w czasie ruchu obrotowego twornika, żłobek w któ-rym znajduje się uzwojenie zamknięty jest klinem wykona-nym z drzewa.
Uzwojenie wykonane jest z okrągłych drutów (przymniejszych maszynach) lub z prostokątnych prętów (przywiększych maszynach). Przewody te są izolowane lakieremizolacyjnym, oplotem bawełnianym lub jedwabnym. Pozatym wszystkie przewody są wspólnie odizolowane od żelazapreszpanem, ceratką z miką.
Rys. 3. Budowa wirnika.
1 - izolacja, 2 - blacha, 3 - miejsce na komutator
8
1.3. Budowa komutatora
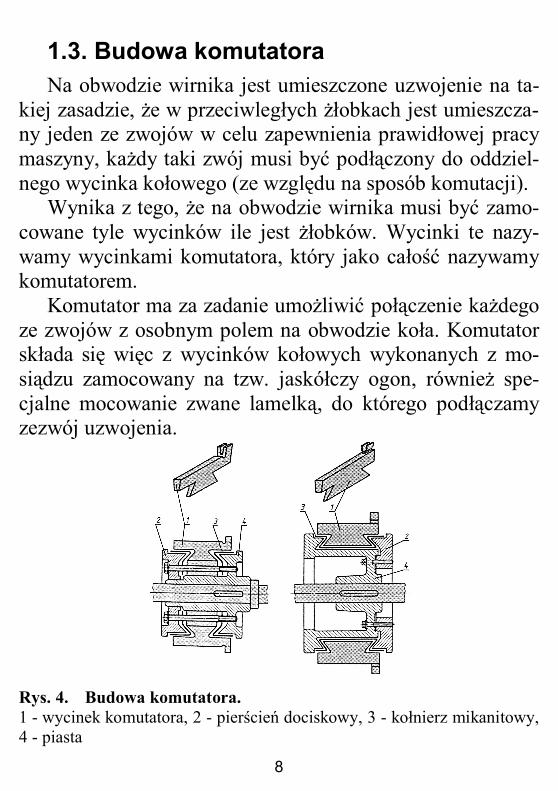
Na obwodzie wirnika jest umieszczone uzwojenie na ta-kiej zasadzie, że w przeciwległych żłobkach jest umieszcza-ny jeden ze zwojów w celu zapewnienia prawidłowej pracymaszyny, każdy taki zwój musi być podłączony do oddziel-nego wycinka kołowego (ze względu na sposób komutacji).
Wynika z tego, że na obwodzie wirnika musi być zamo-cowane tyle wycinków ile jest żłobków. Wycinki te nazy-wamy wycinkami komutatora, który jako całość nazywamykomutatorem.
Komutator ma za zadanie umożliwić połączenie każdegoze zwojów z osobnym polem na obwodzie koła. Komutatorskłada się więc z wycinków kołowych wykonanych z mo-siądzu zamocowany na tzw. jaskółczy ogon, również spe-cjalne mocowanie zwane lamelką, do którego podłączamyzezwój uzwojenia.
Rys. 4. Budowa komutatora.
1 - wycinek komutatora, 2 - pierścień dociskowy, 3 - kołnierz mikanitowy,4 - piasta
9
1.4. Budowa układu szczotkowego
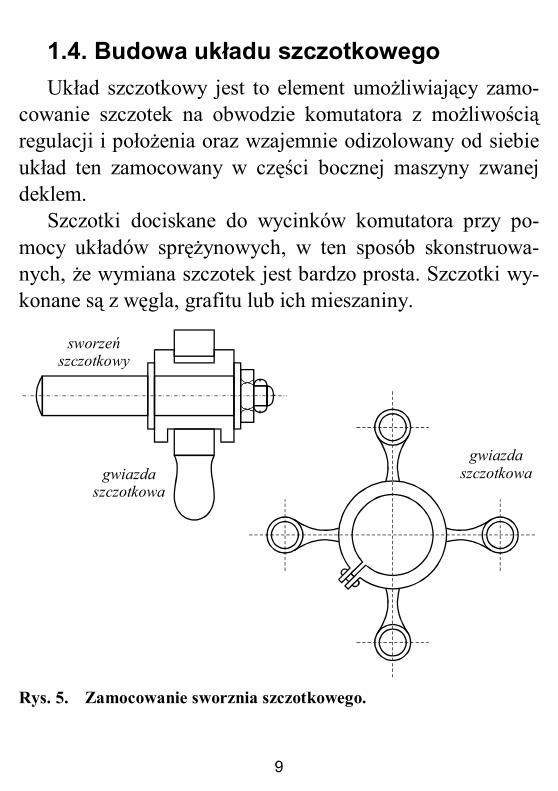
Układ szczotkowy jest to element umożliwiający zamo-cowanie szczotek na obwodzie komutatora z możliwościąregulacji i położenia oraz wzajemnie odizolowany od siebieukład ten zamocowany w części bocznej maszyny zwanejdeklem.
Szczotki dociskane do wycinków komutatora przy po-mocy układów sprężynowych, w ten sposób skonstruowa-nych, że wymiana szczotek jest bardzo prosta. Szczotki wy-konane są z węgla, grafitu lub ich mieszaniny.
gwiazdaszczotkowa
gwiazdaszczotkowa
sworzeńszczotkowy
Rys. 5. Zamocowanie sworznia szczotkowego.
10
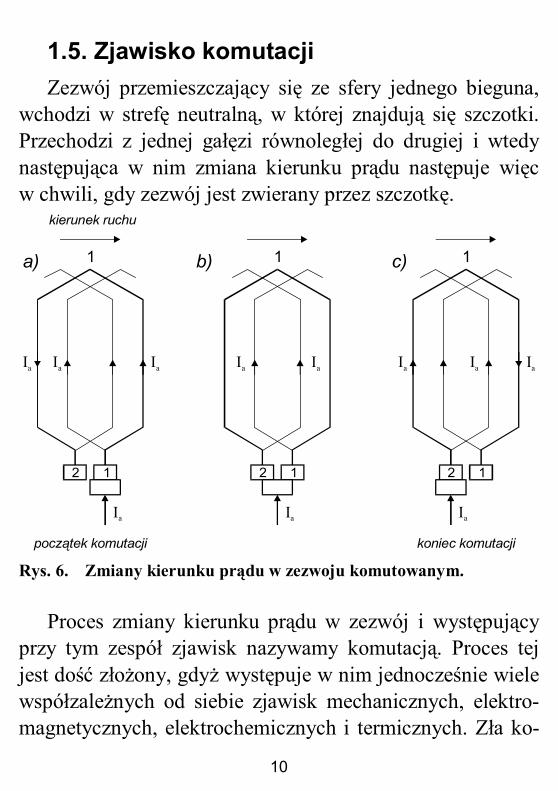
1.5. Zjawisko komutacji
Zezwój przemieszczający się ze sfery jednego bieguna,wchodzi w strefę neutralną, w której znajdują się szczotki.Przechodzi z jednej gałęzi równoległej do drugiej i wtedynastępująca w nim zmiana kierunku prądu następuje więcw chwili, gdy zezwój jest zwierany przez szczotkę.
2 1
Ia
Ia Ia Ia
1
kierunek ruchu
początek komutacji
2 1
Ia
Ia Ia
1
2 1
Ia
Ia Ia Ia
1
koniec komutacji
a) b) c)
Rys. 6. Zmiany kierunku prądu w zezwoju komutowanym.
Proces zmiany kierunku prądu w zezwój i występującyprzy tym zespół zjawisk nazywamy komutacją. Proces tejjest dość złożony, gdyż występuje w nim jednocześnie wielewspółzależnych od siebie zjawisk mechanicznych, elektro-magnetycznych, elektrochemicznych i termicznych. Zła ko-
11
mutacja wywołuje iskrzenie szczotek, które może być przy-czyną zniszczenia szczotek i komutatora. Komutację uwa-żamy za zadawalającą wtedy, gdy szczotki nie iskrzą.
1.6. Zasada działania silnika prądu stałego
Przeznaczeniem silników jest przetwarzanie mocy elek-trycznej prądu stałego na moc mechaniczną. Moc elektrycz-na pobierana przez silnik z sieci zależy od mocy mechanicz-nej użytecznej Pmu, to jest od mocy, jaką w danej chwilipotrzebuje urządzenie napędzane. Należy więc tak dobieraćmoc znamionową silnika elektrycznego aby urządzenie na-pędzane nie powodowało przeciążenia silnika czyli obciąże-nia silnika mocą większą od znamionowanej.
Moc znamionowa silnika Pn jest mocą mechanicznąużyteczną oddawaną przez silnik, który z sieci o napięciuznamionowym Un pobiera prąd znamionowy In. Parametremcharakteryzującym silnik jest również znamionowa prędkośćobrotowa lub znamionowa prędkość kątowa ωn.
Wartość znamionowa mocy oraz prędkości kątowej okre-ślają moment znamionowy silnika:
n
nn
W
PM =
Mn - moment znamionowy silnikaPn - moc znamionowa silnikaωn - znamionowa prędkość kątowa silnika
12
Moment Mobc obciążający silnik (moment urządzenia na-pędzanego) po dodaniu do niego momentu Ms strat wła-snych silnika musi być zrównoważony momentem elektro-magnetycznym określający wzorem:
wIcM ⋅Φ⋅=
M - moment silnikac - stała silnikaФ - wartość strumienia głównegoIw - prąd wirnika
Tak więc silnik może działać tylko wówczas gdy w polumagnetycznym charakteryzowanym strumieniem Ф płynieprzez uzwojenie wirnika, prąd Iw. Wartość tego prądu zależyod momentu sumy obciążenia Mobc i momentu strat Ms czyli
Φ⋅
+=
Φ⋅=
c
MM
c
MI
sobct
Aby z sieci o napięciu U mógł dopłynąć do twornikaprąd It musi być spełniony warunek:
t
t
R
EUI
−=
W równaniu tym przyjmuje się, że napięcie sieci jeststałe (U=const), tak więc może zmieniać się tylko siła elek-tromotoryczna
13
ϖ⋅Φ⋅= cE
zależna od strumienia Ф oraz od prędkości wirowania ω.
Na tej podstawie możemy zapisać zależność międzymomentem obciążenia a prędkością wirowania silnika:
Φ⋅
+−=
c
IRU ttϖ
Zależność między prędkością wirowania wirnika a mo-mentem obciążenia nazywa się charakterystyką mecha-niczną silnika. Na przebieg tej charakterystyki wpływa wsposób istotny wartość strumienia głównego silnik, którazależy od rodzaju silnika.
14
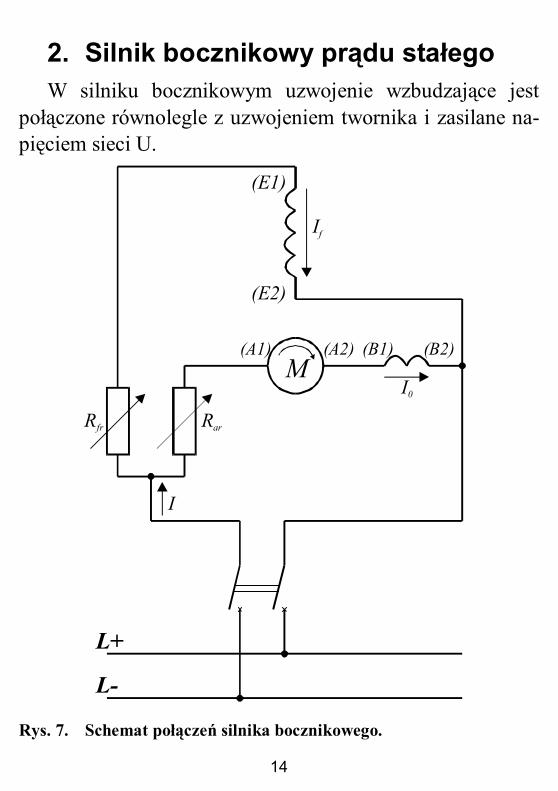
2. Silnik bocznikowy prądu stałego
W silniku bocznikowym uzwojenie wzbudzające jestpołączone równolegle z uzwojeniem twornika i zasilane na-pięciem sieci U.
(E1)
(A1)
M(A2) (B1) (B2)
If
I0
I
L+
L-
RarRfr
(E2)
Rys. 7. Schemat połączeń silnika bocznikowego.
15
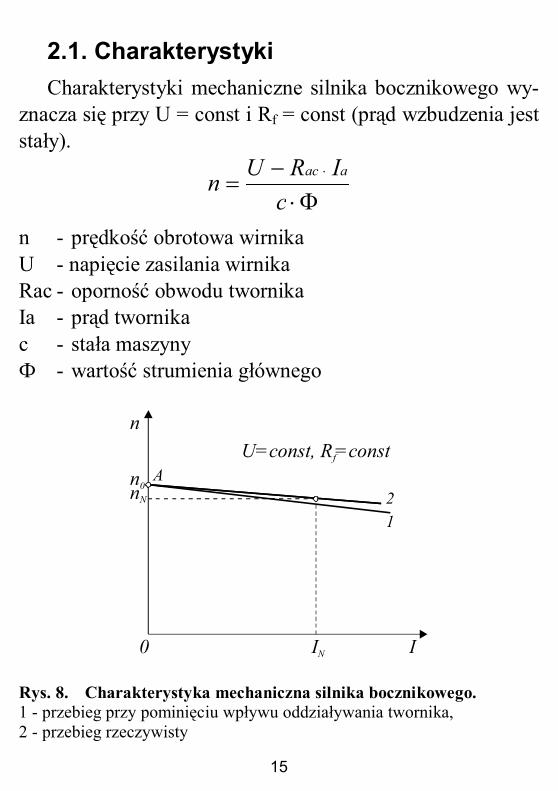
2.1. Charakterystyki
Charakterystyki mechaniczne silnika bocznikowego wy-znacza się przy U = const i Rf = const (prąd wzbudzenia jeststały).
Φ⋅
−=
⋅
c
IRUn
aac
n - prędkość obrotowa wirnikaU - napięcie zasilania wirnikaRac - oporność obwodu twornikaIa - prąd twornikac - stała maszynyФ - wartość strumienia głównego
I0
nN
n0
n
A
1
2
U=const, R =constf
IN
Rys. 8. Charakterystyka mechaniczna silnika bocznikowego.1 - przebieg przy pominięciu wpływu oddziaływania twornika,2 - przebieg rzeczywisty
16
aac
Ic
R
c
Un
Φ⋅−
Φ⋅=
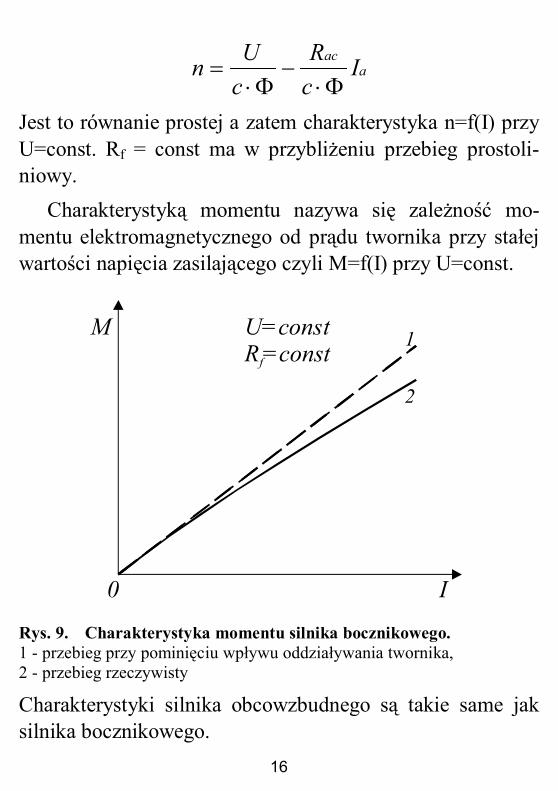
Jest to równanie prostej a zatem charakterystyka n=f(I) przyU=const. Rf = const ma w przybliżeniu przebieg prostoli-niowy.
Charakterystyką momentu nazywa się zależność mo-mentu elektromagnetycznego od prądu twornika przy stałejwartości napięcia zasilającego czyli M=f(I) przy U=const.
I0
M1
2
U=constR =constf
Rys. 9. Charakterystyka momentu silnika bocznikowego.
1 - przebieg przy pominięciu wpływu oddziaływania twornika,2 - przebieg rzeczywisty
Charakterystyki silnika obcowzbudnego są takie same jaksilnika bocznikowego.
17
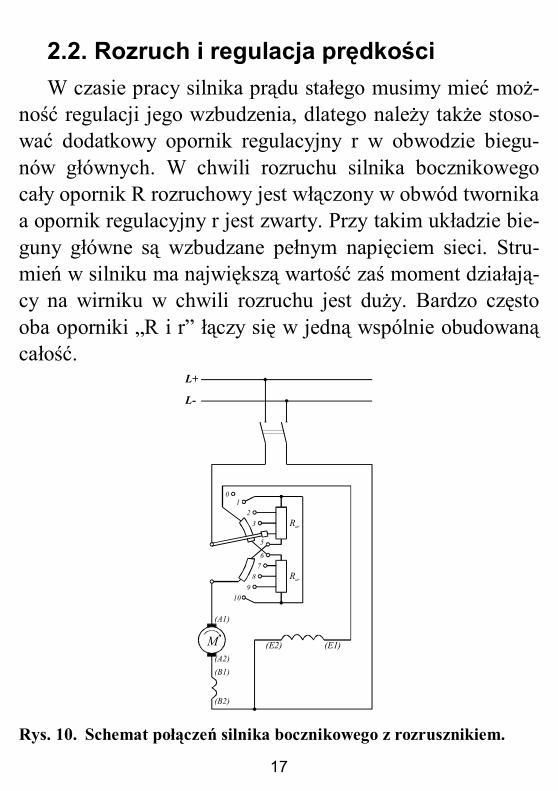
2.2. Rozruch i regulacja prędkości
W czasie pracy silnika prądu stałego musimy mieć moż-ność regulacji jego wzbudzenia, dlatego należy także stoso-wać dodatkowy opornik regulacyjny r w obwodzie biegu-nów głównych. W chwili rozruchu silnika bocznikowegocały opornik R rozruchowy jest włączony w obwód twornikaa opornik regulacyjny r jest zwarty. Przy takim układzie bie-guny główne są wzbudzane pełnym napięciem sieci. Stru-mień w silniku ma największą wartość zaś moment działają-cy na wirniku w chwili rozruchu jest duży. Bardzo częstooba oporniki „R i r” łączy się w jedną wspólnie obudowanącałość.
M (E1)
(A1)
(A2)
(B1)
(B2)
L+
L-
(E2)
Rar
0
10
9
8
7
6
5
3
2
1
Rar
Rys. 10. Schemat połączeń silnika bocznikowego z rozrusznikiem.
18
Styk ruchomej dźwigni rozrusznik ślizga się po pierście-niach S1 S2 oraz po stykach oporu rozruchowego R lub re-gulacyjnego r. Przy takim układzie połączeń w pierwszejchwili do twornika doprowadzamy część napięcia natomiastdo biegunów głównych pełne napięcie. Po zwarciu opornikarozruchowego R, jeśli dźwignię przesuniemy jeszcze dalejw prawo, to na tworniku będzie panować napięcie sieci, na-tomiast do obwodu biegunów głównych włączamy częśćopornika (rozruchowego) regulacyjnego r. Przewód P, któryłączy część oporników R i r ma na celu zamknięcie obwodutwornika i biegunów głównych w chwili gdy silnik zostanieodłączony od sieci. Wskutek tego prąd w biegunach głów-nych zanika stopniowo, gdyż po odłączeniu silnika od siecipłynie on jeszcze, dzieli „sem” wznieconej w silniku przezinstalacyjny tam nadal strumień. Silnik stopniowo zmniejszaprędkość i stopniowo zanika w nim pole magnetyczne. Gdy-by nie było tego połączenia w momencie odłączenia silnikapowstałby na wyłączniku bardzo silny łuk, a w uzwojeniachbiegunów głównych w wyniku małego zaniku prądu były byindukowane tak duże „sem”, że mogłyby uszkodzić izolację.Rozruch i regulacja prędkości jest analogiczna do silnikaobcowzbudnego.
19
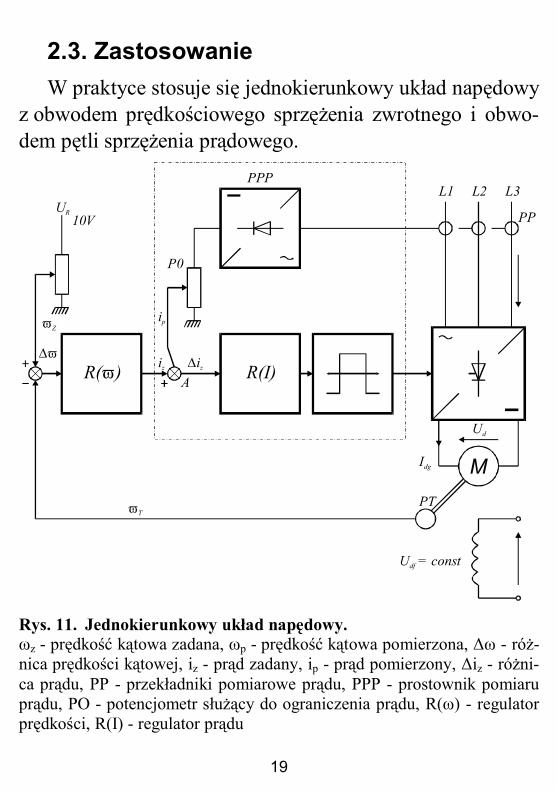
2.3. Zastosowanie
W praktyce stosuje się jednokierunkowy układ napędowyz obwodem prędkościowego sprzężenia zwrotnego i obwo-dem pętli sprzężenia prądowego.
R( )ϖ
ϖZ
ϖT
∆ϖ
UR
Idg
10V
P0
PT
U = constdf
Ud
PPP
PP
L2L1 L3
A
∆iziz
ip
R(I)
M
Rys. 11. Jednokierunkowy układ napędowy.ωz - prędkość kątowa zadana, ωp - prędkość kątowa pomierzona, ∆ω - róż-nica prędkości kątowej, iz - prąd zadany, ip - prąd pomierzony, ∆iz - różni-ca prądu, PP - przekładniki pomiarowe prądu, PPP - prostownik pomiaruprądu, PO - potencjometr służący do ograniczenia prądu, R(ω) - regulatorprędkości, R(I) - regulator prądu
20
Pętla prądowa decyduje o przebiegu prądu twornikaw stanach pracy dynamicznej. Rozruch silnika następujew wyniku skokowo nastawionego napięcia UR na pencjo-metrze znajdującym prędkość kątową silnika. Z regulatoraprędkości kątowej R(ω) przychodzi na wejście regulatoraprądu R(I) sygnał maksymalny prądu zadanego iz. Sygnałprądu zadanego iz powoduje wysterowanie tyrystorów prze-kształtnika i przepływu prądu Ida przez silnik. Prąd prze-mienny Ir płynący w linii zasilającej prostownik jest wprostproporcjonalny do prądu wyprostowanego Ida. Na wyjściuprostownika pomiaru prądu PPP otrzymuje się sygnał prądupomierzonego ip, który jest wprost proporcjonalny do warto-ści prądu Ida płynącego przez silnik. Sygnał prądu pomierzo-nego ip ma znak przeciwny niż sygnał prądu zadanego iz.Różnica tych sygnałów ∆iz powoduje wysterowanie regula-tora prądu R(I) i przepływ prądu o określonej wartościw okresie rozruchu. Prąd ten jest nazywany prądem ograni-czenia Idg. Wartość prądu Idg jest nastawiona podczas rozru-chu technologicznego maszyny i już w czasie eksploatacjinie jest zmieniana (potencjometr PO). Nastawia się ją poni-żej dopuszczalnej przeciążalności silnika napędowego lubgranicznej obciążalności prądowej przekształtnika. Podczasrozruchu wartość natężenia prądu twornika nie przekraczaprądu ograniczenia Idg poza bardzo krótkim okresem przej-ściowym (który zostanie szerzej opisany w następnych roz-działach).
21
Po zakończeniu rozruchu silnika sygnały prądu zadanegoiz i pomierzonego ip obniżają swoje wartości i sterowaniepracą przekształtnika przyjmuje regulator prędkości kątowejR(ω) odpowiedzialny za stabilizację prędkości kątowej.W stanie pracy ustalonej sygnał prędkości zadanej ωz jestporównywany z sygnałem prędkości mierzonej ωp. Sygnałuchybu prędkości powoduje wysterowanie wzmacniaczaprędkości R(ω) w taki sposób, aby prędkość kątowa silnikabyła równa prędkości zadanej. Ze względu na to, że wzmoc-nienie statyczne wzmacniaczy jest bardzo duże, ustalonytryb prędkości kątowej między prędkością zadaną a pomie-rzoną jest bardzo mały.
22
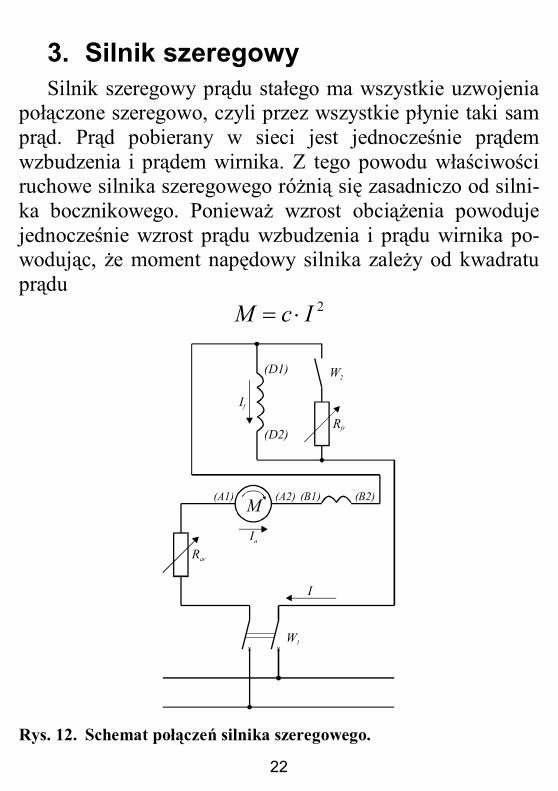
3. Silnik szeregowy
Silnik szeregowy prądu stałego ma wszystkie uzwojeniapołączone szeregowo, czyli przez wszystkie płynie taki samprąd. Prąd pobierany w sieci jest jednocześnie prądemwzbudzenia i prądem wirnika. Z tego powodu właściwościruchowe silnika szeregowego różnią się zasadniczo od silni-ka bocznikowego. Ponieważ wzrost obciążenia powodujejednocześnie wzrost prądu wzbudzenia i prądu wirnika po-wodując, że moment napędowy silnika zależy od kwadratuprądu
2IcM ⋅=
(D1)
(A1)M
(A2) (B1) (B2)
If
Ia
I
Rar
Rfr
W2
W1
(D2)
Rys. 12. Schemat połączeń silnika szeregowego.

23
3.1. Charakterystyki
W zakresie prędkości mało różniących się od prędkościznamionowej można przyjąć, że charakterystyka mecha-niczna silnika szeregowego jest hiperbolą. Taką charaktery-stykę nazywa się szeregową. Widać, że przy małym mo-mencie obciążenia prędkość przybiera duże wartości, wirniksię rozbiega.
M0
nN
n U=constsilnik małej mocy
MN
Rys. 13. Charakterystyka mechaniczna silnika szeregowego.
Charakterystykę momentu silnika prądu stałego określasię wzorem:
IcM ⋅Φ⋅=
24
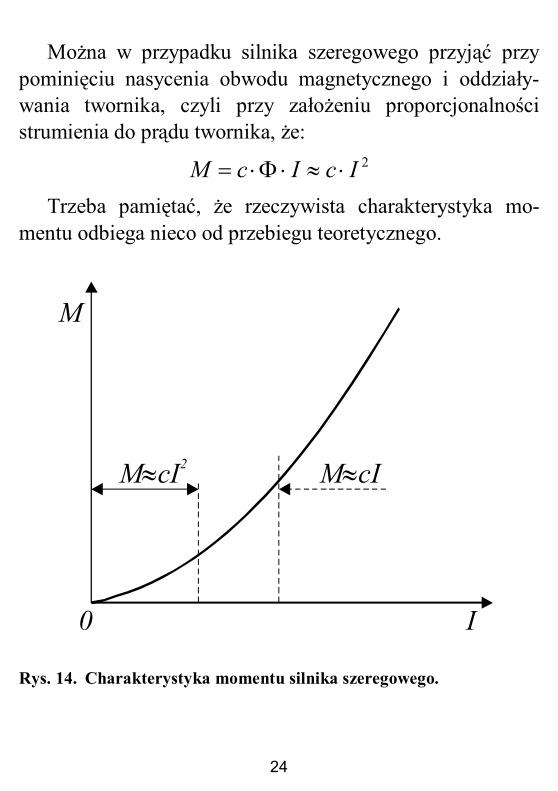
Można w przypadku silnika szeregowego przyjąć przypominięciu nasycenia obwodu magnetycznego i oddziały-wania twornika, czyli przy założeniu proporcjonalnościstrumienia do prądu twornika, że:
2IcIcM ⋅≈⋅Φ⋅=
Trzeba pamiętać, że rzeczywista charakterystyka mo-mentu odbiega nieco od przebiegu teoretycznego.
I0
M
M cI≈2
M cI≈
Rys. 14. Charakterystyka momentu silnika szeregowego.
25
3.2. Rozruch i regulacja
W układzie połączeń silnika szeregowego opornik Rfr
służy do regulacji i prędkości obrotowej, opornik Rar możesłużyć do rozruchu oraz do regulacji prędkości obrotowej.Przy otwartym włączniku prąd twornika równy prądowi ob-ciążenia jest zarazem równy prądowi magnesującemu, czyliIa=I=If. Moment obrotowy M=cΦI przy pominięciu nasyce-nia obwodu magnetycznego i reakcji twornika może być wy-rażony przez M=cI2. W czasie rozruchu wyłącznik jestotwarty, opornik Rar jest nastawiony na taką wartość, abyprąd nie przekroczył dwukrotnej wartości prądu znamiono-wego.
Prędkość obrotową silnika szeregowego analogicznie jakprędkość obrotową silnika bocznikowego można regulowaćdwoma sposobami: przez zmianę napięcia twornika orazprzez zmianę przepływu wzbudzenia.
Zmianę napięcia twornika można uzyskać np. przezzmianę rezystancji w obwodzie twornika. Ten sposób powo-duje powstanie dużych strat i zmniejszenie sprawności pro-porcjonalnie do zmniejszenia prędkości podobnie jak w sil-niku bocznikowym. Dlatego ten sposób regulacji jestdopuszczalny tylko w przypadku małych silników. Regula-cję prędkości praktycznie bez strat uzyskuje się przez zasila-nie silnika z prostownika o regulowanej wartości napięciawyprostowanego.
26
Zmianę przepływu wzbudzenia można uzyskać alboprzez bocznikowanie uzwojenia wzbudzenia, kiedy przystałej liczbie zwojów zmienia się wartość prądu twornika,albo przez zmianę liczby zwojów przy prądzie wzbudzeniarównym prądowi twornika.
3.3. Zastosowanie
Silniki trakcyjne
Pojazdy elektryczne tzn. lokomotywy elektryczne pra-cujące w liniach PKP zasilane są napięciem stałym 3 kW.Tramwaje natomiast pracują przy napięciu 600 W. Za po-mocą aparatów trakcyjnych wykonuje się wszelkie przełą-czenia w obwodach elektrycznych pojazdów trakcyjnychzwiązanych z uruchomieniem, rozruchem i izolacją prędko-ści pojazdów oraz hamowania. Wyszczególnione elementynazywamy ogólnie rozrządem.
1) Rozrząd bezpośredni to taki rozrząd gdzie wszystkie łą-czenia dokonywane są w ustawniku bezpośrednim. Takierozwiązanie stosujemy w maszynach niewielkich mocy np.tramwajach, lokomotywach.
27
FA B
1
2 3
45
R1
R2
R3
E
I
E
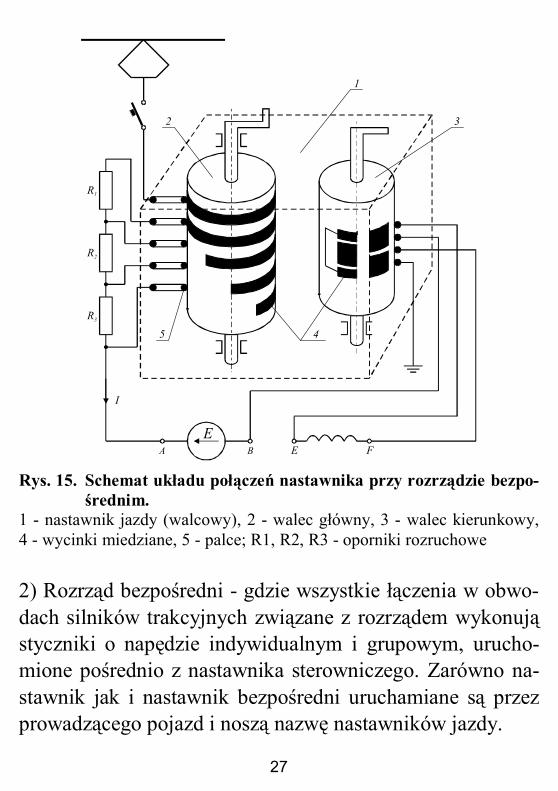
Rys. 15. Schemat układu połączeń nastawnika przy rozrządzie bezpo-
średnim.1 - nastawnik jazdy (walcowy), 2 - walec główny, 3 - walec kierunkowy,4 - wycinki miedziane, 5 - palce; R1, R2, R3 - oporniki rozruchowe
2) Rozrząd bezpośredni - gdzie wszystkie łączenia w obwo-dach silników trakcyjnych związane z rozrządem wykonująstyczniki o napędzie indywidualnym i grupowym, urucho-mione pośrednio z nastawnika sterowniczego. Zarówno na-stawnik jak i nastawnik bezpośredni uruchamiane są przezprowadzącego pojazd i noszą nazwę nastawników jazdy.
28
4. Silnik szeregowo-bocznikowy
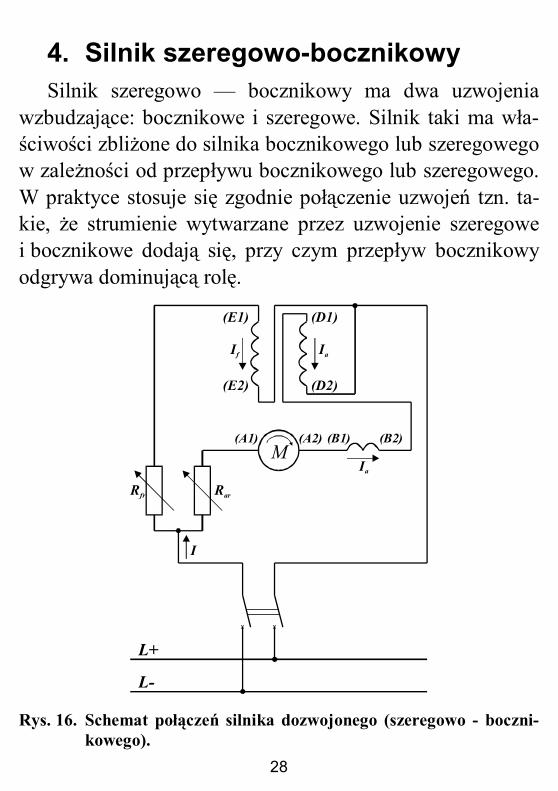
Silnik szeregowo — bocznikowy ma dwa uzwojeniawzbudzające: bocznikowe i szeregowe. Silnik taki ma wła-ściwości zbliżone do silnika bocznikowego lub szeregowegow zależności od przepływu bocznikowego lub szeregowego.W praktyce stosuje się zgodnie połączenie uzwojeń tzn. ta-kie, że strumienie wytwarzane przez uzwojenie szeregowei bocznikowe dodają się, przy czym przepływ bocznikowyodgrywa dominującą rolę.
(E1) (D1)
(A1)
M(A2) (B1) (B2)
If
Ia
Ia
I
L+
L-
RarRfr
(E2) (D2)
Rys. 16. Schemat połączeń silnika dozwojonego (szeregowo - boczni-
kowego).
29
4.1. Charakterystyki
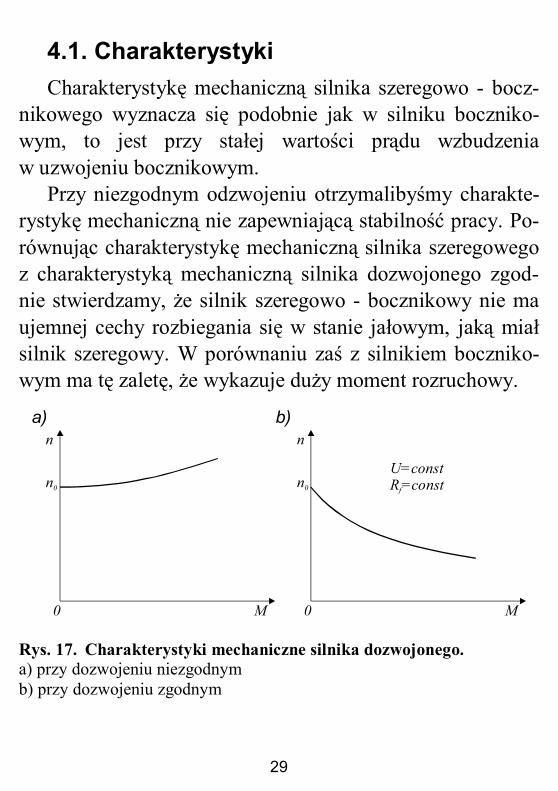
Charakterystykę mechaniczną silnika szeregowo - bocz-nikowego wyznacza się podobnie jak w silniku boczniko-wym, to jest przy stałej wartości prądu wzbudzeniaw uzwojeniu bocznikowym.
Przy niezgodnym odzwojeniu otrzymalibyśmy charakte-rystykę mechaniczną nie zapewniającą stabilność pracy. Po-równując charakterystykę mechaniczną silnika szeregowegoz charakterystyką mechaniczną silnika dozwojonego zgod-nie stwierdzamy, że silnik szeregowo - bocznikowy nie maujemnej cechy rozbiegania się w stanie jałowym, jaką miałsilnik szeregowy. W porównaniu zaś z silnikiem boczniko-wym ma tę zaletę, że wykazuje duży moment rozruchowy.
U=constR =constf
M0
n0
n
M0
n0
n
a) b)
Rys. 17. Charakterystyki mechaniczne silnika dozwojonego.a) przy dozwojeniu niezgodnymb) przy dozwojeniu zgodnym
30
4.2. Rozruch i regulacja
Rozruch silnika szeregowo - bocznikowego dokonuje sięanalogicznie jak silnika bocznikowego. Mały silnik szere-gowo - bocznikowy może być uruchomiony przez bezpo-średnie włączenie do sieci, a więc np. przy zwartych oporni-kach regulacyjnych: w obwodzie twornika Rar i w obwodziewzbudzenia bocznikowego Rfr. Większe silniki szeregowobocznikowe należy uruchomić przez zmniejszenie napięciadoprowadzonego do twornika za pomocą odpowiedniegowysterowania prostownika zasilającego twornik, albo przezwłączenie odpowiedniej rezystancji Rar w obwód twornika.
Regulacja prędkości silników szeregowo - bocznikowychmoże być dokonywana tak, jak silników bocznikowych lubszeregowych w zależności od tego, które z uzwojeń mawiększy wpływ na własności ruchowe maszyny.
31
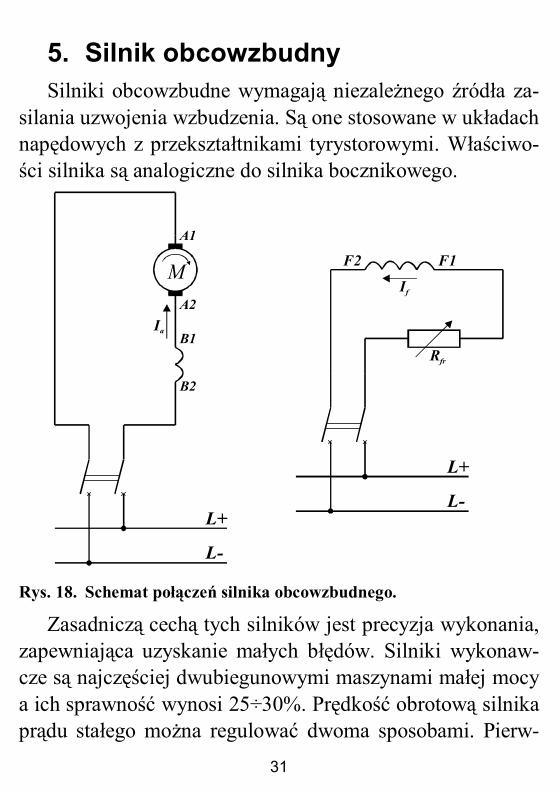
5. Silnik obcowzbudny
Silniki obcowzbudne wymagają niezależnego źródła za-silania uzwojenia wzbudzenia. Są one stosowane w układachnapędowych z przekształtnikami tyrystorowymi. Właściwo-ści silnika są analogiczne do silnika bocznikowego.
MF1
A1
A2
B1
B2
L+
L-
L+
L-
F2
If
Rfr
Ia
Rys. 18. Schemat połączeń silnika obcowzbudnego.
Zasadniczą cechą tych silników jest precyzja wykonania,zapewniająca uzyskanie małych błędów. Silniki wykonaw-cze są najczęściej dwubiegunowymi maszynami małej mocya ich sprawność wynosi 25÷30%. Prędkość obrotową silnikaprądu stałego można regulować dwoma sposobami. Pierw-
32
szy sposób polega na regulacji strumienia magnetycznego,drugi na regulacji siły elektromotorycznej przez zmianę na-pięcia na zaciskach twornika. Najczęściej silnikami wyko-nawczymi steruje się przez zmianę napięcia twornika, mimoże sterowanie przez zmianę prądu wzbudzenia jest tańszei wymaga mniejszej mocy sterującej. Sterowanie napięciemtwornika odbywa się przy stałym strumieniu magnesów,natomiast sterowanie przez zmianę strumienia przy stałejwartości napięcia twornika.
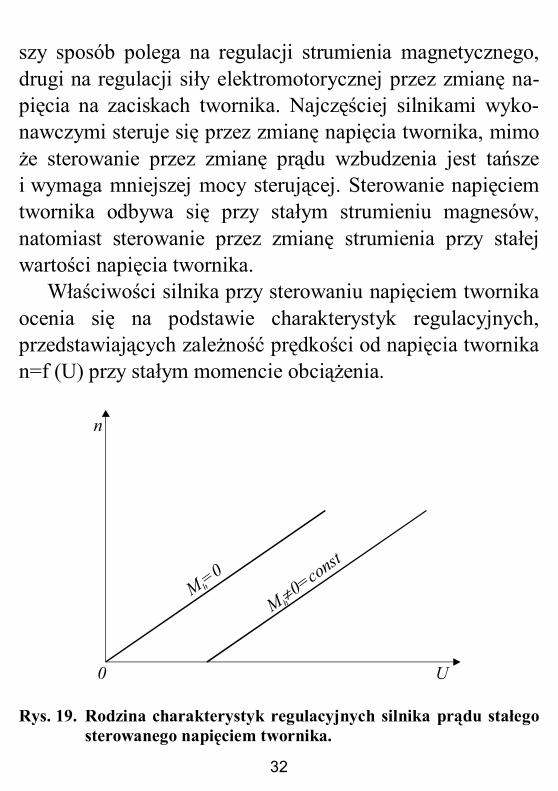
Właściwości silnika przy sterowaniu napięciem twornikaocenia się na podstawie charakterystyk regulacyjnych,przedstawiających zależność prędkości od napięcia twornikan=f (U) przy stałym momencie obciążenia.
U0
n
M=0h
M0=const
h≠
Rys. 19. Rodzina charakterystyk regulacyjnych silnika prądu stałego
sterowanego napięciem twornika.
33
Sterowanie napięciem wzbudzenia może być realizowanetylko w silnikach o wzbudzeniu elektromagnetycznym. Ste-rowanie to nie znajduje jednak szerszego zastosowaniaszczególnie ze względu na nie liniowość charakterystyki re-gulacyjnej oraz dużą elektromagnetyczną stałą czasowąuzwojenia wzbudzającego, mimo istotnej zalety jaką jestmała moc źródła sterującego.
34
Wnioski
Tematem mojej pracy dyplomowej była budowa i zasadadziałania oraz własności ruchowe silników prądu stałego.Chcąc omówić wyżej wymieniony temat w drugiej częścipracy przedstawiłam budowę poszczególnych elementówmaszyny prądu stałego z podaniem jej konstrukcji oraz ce-lowości stosowania.
Silniki prądu stałego możemy podzielić na trzy zasadni-cze grupy: silniki bocznikowe, szeregowe i szeregowo-bocznikowe. Dlatego w poszczególnych rozdziałach pracyprzedstawiłam właściwości ruchowe i zastosowanie tych sil-ników.
Na podstawie zawartych wiadomości opracowałam 30pytań kontrolnych odnośnie przedstawionych wiadomości.
Następnie w ramach części praktycznej pracy wykona-łam 20 testów kontrolnych przez odpowiednie przemiesza-nie pytań. Testy zostały tak opracowane, że w każdymz nich są zawarte wiadomości z całego materiału. Myślę, żetesty te można wykorzystać jako kontrolne wiadomościz zakresu silników prądu stałego w klasie IV technikum.
Napisanie niniejszej pracy zobligowało mnie do zapo-znania się z literaturą fachową i sposobem korzystaniaz niej. Jednocześnie poszerzyłam swoje wiadomości na te-mat silników prądu stałego, które są szeroko wykorzystywa-ne we współczesnych układach napędowych.
35
Literatura
1. Januszewski S., Peytlak A., Rosnowska M., Świątek H.:Napęd elektryczny. WSiP, Warszawa 1994.
2. Stein Z.: Maszyny i napęd elektryczny. WSiP, Warszawa1989.
3. Goźlińsko E.: Maszyny elektryczne. WNT, 1980.4. Latek W.: Maszyny elektryczne w pytaniach i odpowie-
dziach. NNT, Warszawa 1987.
36
Spis rysunków
Rys. 1. Maszyna prądu stałego – szkic. ...........................................4
Rys. 2. Stojan maszyny prądu stałego. ............................................6
Rys. 3. Budowa wirnika. .................................................................7
Rys. 4. Budowa komutatora. ...........................................................8
Rys. 5. Zamocowanie sworznia szczotkowego. ...............................9
Rys. 6. Zmiany kierunku prądu w zezwoju komutowanym. ..........10
Rys. 7. Schemat połączeń silnika bocznikowego...........................14
Rys. 8. Charakterystyka mechaniczna silnika bocznikowego. .......15
Rys. 9. Charakterystyka momentu silnika bocznikowego..............16
Rys. 10. Schemat połączeń silnika bocznikowego z rozrusznikiem. 17
Rys. 11. Jednokierunkowy układ napędowy....................................19
Rys. 12. Schemat połączeń silnika szeregowego. ............................22
Rys. 13. Charakterystyka mechaniczna silnika szeregowego...........23
Rys. 14. Charakterystyka momentu silnika szeregowego. ...............24
Rys. 15. Schemat układu połączeń nastawnika przy rozrządzie
bezpośrednim. ...................................................................27
Rys. 16. Schemat połączeń silnika dozwojonego (szeregowo -
bocznikowego). .................................................................28
Rys. 17. Charakterystyki mechaniczne silnika dozwojonego...........29
Rys. 18. Schemat połączeń silnika obcowzbudnego. .......................31
Rys. 19. Rodzina charakterystyk regulacyjnych silnika prądu
stałego sterowanego napięciem twornika. .........................32