sfu 21.71 dnc commands - sieb & meyer · sfu 21.71 dnc commands 1 ... during the communication...
TRANSCRIPT

!
SFU 21.71 DNC commands 1
SFU 21.71 DNC Commands
SIEB & MEYER AGAuf dem Schmaarkamp 21 ’ D-21339 Lüneburg ’ GermanyTelephone: ++49(4131)203-0 ’ Telefax: ++49(4131)38562
Email: [email protected]: www.sieb-meyer.de

!
2 DNC commands SFU 21.71
The text and the translation of the manual have been worked out very carefully.However, SIEB & MEYER can accept neither obligation nor legal responsibility for
incorrect specifications and their consequences,possibly still described in the manual.
Subject to technical alterations!©SIEB & MEYER AG, Lüneburg
021-SFU-bed-DNC-Kommandos/R002-SM-EN-KM/CL/FIS/SHEOctober 15, 2004
! Contents
SFU 21.71 DNC commands 3
1 DNC61-Protocol of SIEB & MEYER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1 Prompt Telegram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.1.1 CMD_SBYTE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.1.2 CMD_BYTE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.1.3 CMD_PAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.2 Reply Telegram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2.1 SFU_SB0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2.2 SFU_SB1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.3 SFU_SB2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.4 SFU_SB3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.5 SFU_PAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.3 Handshake between Master and Slave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Description of the DNC commands (CMD_BYTE) . . . . . . . . . . . . . . . . . . . 13Valid from application U71prb53 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.1 Command 64:Set Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.2 Command 65:Read Actual Values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.3 Command 66:Clear Error or Message . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.4 Command 67:Controller deactivated . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.5 Command 68:Controller activated . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.6 Command 69:Trigger Emergency Stop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.7 Command 70:Rotating with absolute speed . . . . . . . . . . . . . . . . . . . . . . . . . . 172.8 Command 71:Rotating with relative speed . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.9 Command 72:Calibrated . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.10 Command 73:Positioning to absolute position . . . . . . . . . . . . . . . . . . . . . . . . 182.11 Command 74:Positioning to relative position . . . . . . . . . . . . . . . . . . . . . . . . . 182.12 Command 75:Reserved . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.13 Command 76:Set torque reference value . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3 Appendix: Revisions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21

!Contents
4 DNC commands SFU 21.71
! DNC61-Protocol
SFU 21.71 DNC commands - 5 -
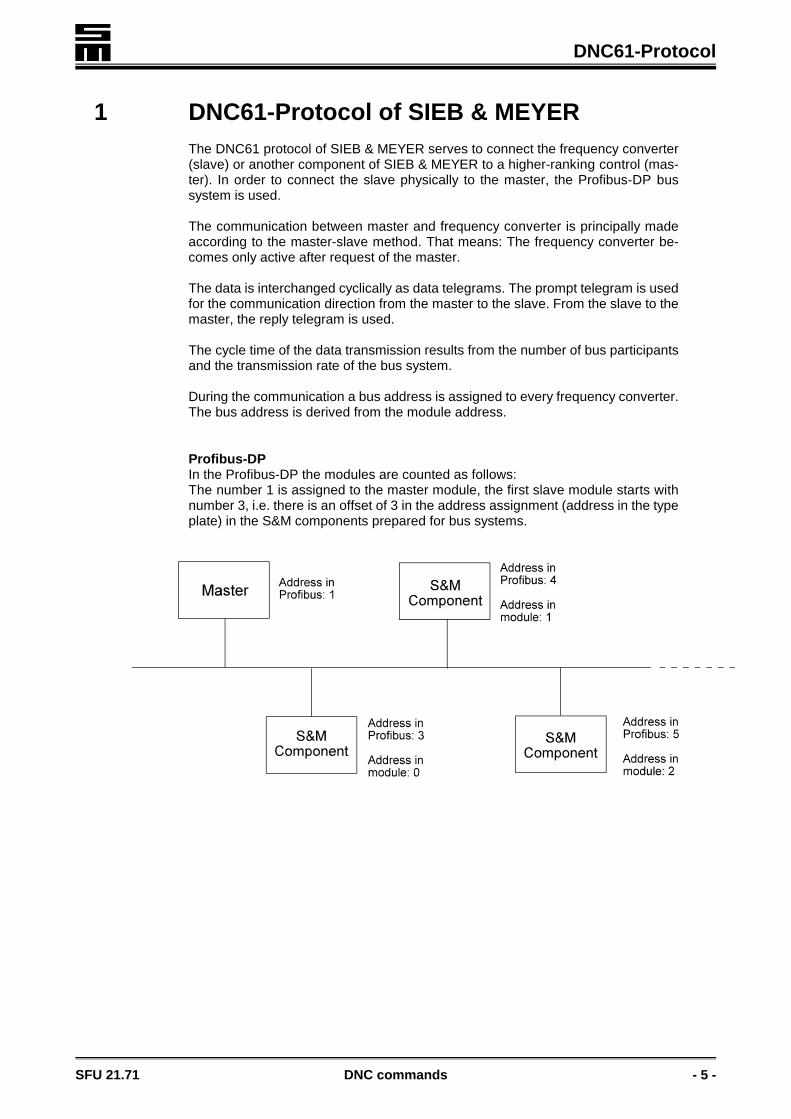
1 DNC61-Protocol of SIEB & MEYERThe DNC61 protocol of SIEB & MEYER serves to connect the frequency converter(slave) or another component of SIEB & MEYER to a higher-ranking control (mas-ter). In order to connect the slave physically to the master, the Profibus-DP bussystem is used.
The communication between master and frequency converter is principally madeaccording to the master-slave method. That means: The frequency converter be-comes only active after request of the master.
The data is interchanged cyclically as data telegrams. The prompt telegram is usedfor the communication direction from the master to the slave. From the slave to themaster, the reply telegram is used.
The cycle time of the data transmission results from the number of bus participantsand the transmission rate of the bus system.
During the communication a bus address is assigned to every frequency converter.The bus address is derived from the module address.
Profibus-DPIn the Profibus-DP the modules are counted as follows:The number 1 is assigned to the master module, the first slave module starts withnumber 3, i.e. there is an offset of 3 in the address assignment (address in the typeplate) in the S&M components prepared for bus systems.

!DNC61-Protocol
- 6 - DNC commands SFU 21.71
1.1 Prompt TelegramThe master and the slave communicate in a cyclic interchange of firmly definedprompt and reply telegrams.
Range: 8 bytes, data received from the SFU module
Byte# Name Meaning0 CMD_SBYTE control byte for the command transmission
Bit number Name Meaning0 CMD_VALID start command1 CMD_DISABLE disable command23456 CMD_HBEAT Heartbeat- Bit7
1 CMD_BYTE command byte, contains the command number23
4 to 7 CMD_PAR double word (4 bytes) for the parameter transmission to the SFU module

! DNC61-Protocol
SFU 21.71 DNC commands - 7 -
1.1.1 CMD_SBYTEThe master transmits the control bits to the frequency converter via the commandcontrol byte. Among other things, the handshake between master and frequencyconverter is realized by the command control byte.
CMD_VALIDIf this bit is toggled, another command will be initiated. At this time, CMD_BYTE andCMD_PAR must contain valid data.
CMD_DISABLECommands can be affected with the disable bit, for example starting or interruptingpositioning commands. A received CMD_DISABLE bit can block the execution of acommand. The reaction is command-specific.
CMD_HBEATThe heartbeat bit CMD_HBEAT can be used for the mutual monitoring of master andslave (frequency converter). For this, the master toggles the bit CMD_HBEAT andmonitors whether the frequency converter has adapted the bit SFU_HBEAT after adefined time.
L If the controller is activated, the master must toggle theCMD_HBEAT within 3 seconds.
1.1.2 CMD_BYTEVia the CMD_BYTE, the master selects the respective command stored in the fre-quency converter. The selection is made by unambiguous command numbers. In theCMD_PAR, a 32 bit parameter can be transmitted with every command.
1.1.3 CMD_PARIn the CMD_PAR, a 32 bit parameter can be transmitted with every command fromthe master to the frequency converter.

!DNC61-Protocol
- 8 - DNC commands SFU 21.71
1.2 Reply TelegramThe master and the slave communicate in a cyclic interchange of firmly definedprompt and reply telegrams.
Range: 8 bytes, data transmitted from the SFU module to the master
Byte# Name Meaning0 SFU_SB0 status byte 0
Bit number Name Meaning0 SFU_DONE command finished, toggle1 SFU_ACKN command received, toggle2 SFU_ERR error message34 SFU_INPOS in position window56 SFU_HBEAT Heartbeat- Bit7
1 SFU_SB1 status byte 1
Bit number Name Meaning0 SFU_INIT initialization necessary1 SFU_RUN automatic operation2 SFU_ON controller activated3 SFU_CAL calibrated4 SFU_V_ZERO ramp generator = ZERO56 SFU_V_OK ramp generator = reference value7 SFU_I_LIMIT current limitation
2 SFU_SB2 status byte 2, error and message codes3 SFU_SB3 status byte 3
Bit number Name Meaning0 controller activated output stage ACTIVATED
1 r.p.m. ZERO actual speed value smaller than set-tings
2 r.p.m. OK actual speed value within the toler-ances
3 load limit load higher than settings 4 current limitation maximum current reached
5 position OK actual position in the positioningwindow
6 calibrating calibrated7 error error
4 to 7 SFU_PAR command return value

! DNC61-Protocol
SFU 21.71 DNC commands - 9 -
1.2.1 SFU_SB0The status byte SFU_SB0 informs the master about the status of the frequency con-verter via separate status bits.
SFU_DONEBy adapting the bit SFU_DONE to the bit CMD_VALID the master is informed that theexecution of a command is finished.
SFU_ACKNBy adapting the bit SFU_ACKN to the bit CMD_VALID the master is informed that thecommand has been received and that it will be executed.
SFU_ERRThe bit indicates whether a command error or a malfunction of the unit has occurred.The bit SFU_ERR must only be evaluated if the command has been finished. Then,SFU_DONE and SFU_ACKN are adapted to CMD_VALID. In this case, the byteSFU_SB2 contains the error code.
SFU_INPOSDuring a positioning command, this bit indicates whether the actual position is in thepositioning window, referring to the destination position.
SFU_HBEATThe heartbeat bit SFU_HBEAT can be used for monitoring the frequency converter.For this, the master toggles the bit CMD_HBEAT and monitors whether the frequencyconverter has adapted the bit SFU_HBEAT after a defined time.

!DNC61-Protocol
- 10 - DNC commands SFU 21.71
1.2.2 SFU_SB1The status byte SFU_SB1 informs the master about the status of the frequency con-verter via separate status bits.
SFU_INITThis bit will be set if required parameters have not been initialized yet.
SFU_RUNThis bit will be set if the frequency converter is in the operational mode AUTOMATIC.
SFU_ONThe bit indicates whether the output stage is activated (SFU_ON = 1) or deactivated(SFU_ON = 0).
SFU_CALThe bit indicates whether a reference move has been made (SFU_CAL = 1) or muststill be made (SFU_CAL = 0).
SFU_V_ZEROIn case of SFU_V_ZERO = 1, the ramp generator has the value 0.
SFU_V_OKThe bit SFU_V_OK indicates that the ramp generator has reached the referencevalue.
SFU_I_LIMITThe bit SFU_I_LIMIT will be set if the frequency converter is within the current limita-tion.
1.2.3 SFU_SB2If bit SFU_ERR is set, SFU_SB2 contains an error code. If bit SFU_ERR is not set,SFU_SB2 contains a message code. An error code always overwrites a messagecode.
1.2.4 SFU_SB3This status byte transmits messages back to the master (see table page 8).
1.2.5 SFU_PARAfter request by respective commands, the frequency converter transmits a 32 bitparameter to the master. .The parameter is only valid, when CMD_ACKN is equal toCMD_VALID.

! DNC61-Protocol
SFU 21.71 DNC commands - 11 -
1.3 Handshake between Master and SlaveThe handshake between master and frequency converter is generated by tracking thebits SFU_ACKN and SFU_DONE to the master bit CMD_VALID. The following dia-gram shows the chronological cycles of succeeding commands.
Command 1:(1) The master #toggles’ the bit CMD_VALID after assigning a command to the
CMD_BYTE. Both can also be made in the same prompt telegram.(2) After adapting SFU_ACKN the frequency converter provides actual return val-
ues in the double word SFU_PAR.(3) If the command has been finished, the frequency converter will adapt
SFU_DONE to CNC_VALID. Thus, the master will get the information about thefinished command. If an error has occurred during this time in the frequencyconverter, SFU_DONE will be adapted to CMD_VALID and SFU_ERR will beset. Then, the error code will be transmitted to the master with SFU_SB1.SFU_ERR and SFU_SB1 only contain valid data after the adaptation ofSFU_DONE to CMD_VALID.
Command 2:(4), (5) and (6)
Command 3:(7), (8) and (9)

!DNC61-Protocol
- 12 - DNC commands SFU 21.71

! Description of the DNC commands
SFU 21.71 DNC commands - 13 -
2 Description of the DNC commands(CMD_BYTE)Valid from application U71prb53
At present, the DNC commands 64 to 76 are implemented. If other commands areused, the message „wrong command“ is indicated (error 80 in SFU_SB2).
Command number(CMD_BYTE) Function
64 set settings65 read actual values66 clear error or message67 controller deactivated68 controller activated69 trigger emergency stop70 rotating with absolute speed71 rotating with relative speed72 calibrating (reference move)73 positioning to absolute position74 positioning to relative position75 reserved76 set torque reference value
!Description of the DNC commands
- 14 - DNC commands SFU 21.71
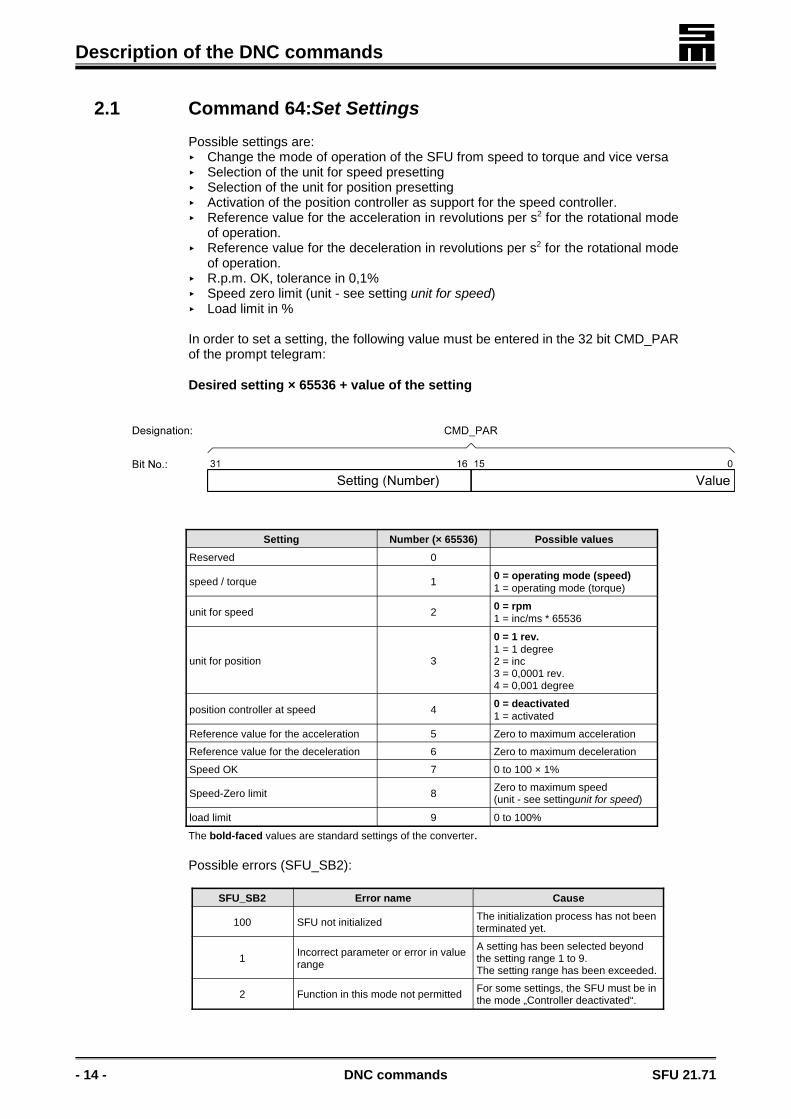
2.1 Command 64:Set SettingsPossible settings are:< Change the mode of operation of the SFU from speed to torque and vice versa< Selection of the unit for speed presetting< Selection of the unit for position presetting< Activation of the position controller as support for the speed controller.< Reference value for the acceleration in revolutions per s2 for the rotational mode
of operation. < Reference value for the deceleration in revolutions per s2 for the rotational mode
of operation.< R.p.m. OK, tolerance in 0,1%< Speed zero limit (unit - see setting unit for speed)< Load limit in %
In order to set a setting, the following value must be entered in the 32 bit CMD_PARof the prompt telegram:
Desired setting × 65536 + value of the setting
Setting Number (× 65536) Possible valuesReserved 0
speed / torque 1 0 = operating mode (speed)1 = operating mode (torque)
unit for speed 2 0 = rpm1 = inc/ms * 65536
unit for position 3
0 = 1 rev.1 = 1 degree2 = inc3 = 0,0001 rev.4 = 0,001 degree
position controller at speed 4 0 = deactivated1 = activated
Reference value for the acceleration 5 Zero to maximum acceleration Reference value for the deceleration 6 Zero to maximum decelerationSpeed OK 7 0 to 100 × 1%
Speed-Zero limit 8 Zero to maximum speed(unit - see settingunit for speed)
load limit 9 0 to 100%
The bold-faced values are standard settings of the converter.
Possible errors (SFU_SB2):
SFU_SB2 Error name Cause
100 SFU not initialized The initialization process has not beenterminated yet.
1 Incorrect parameter or error in valuerange
A setting has been selected beyond the setting range 1 to 9.The setting range has been exceeded.
2 Function in this mode not permitted For some settings, the SFU must be inthe mode „Controller deactivated“.
! Description of the DNC commands
SFU 21.71 DNC commands - 15 -
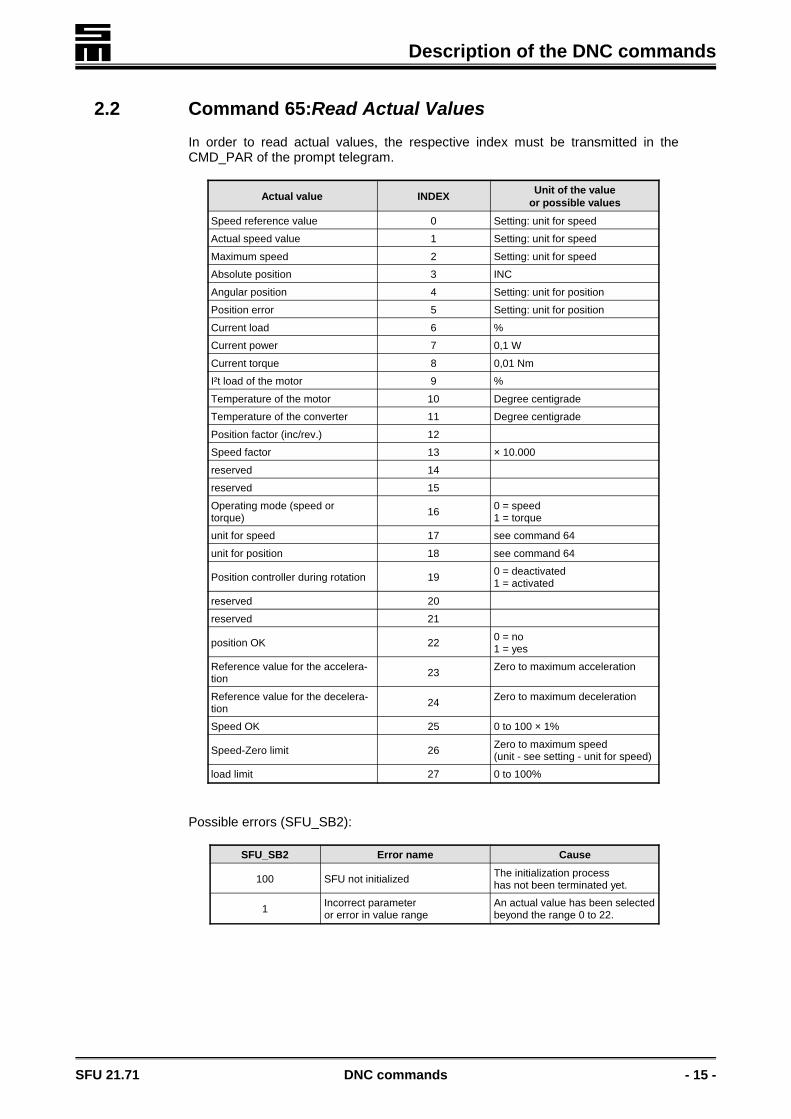
2.2 Command 65:Read Actual ValuesIn order to read actual values, the respective index must be transmitted in theCMD_PAR of the prompt telegram.
Actual value INDEX Unit of the valueor possible values
Speed reference value 0 Setting: unit for speedActual speed value 1 Setting: unit for speedMaximum speed 2 Setting: unit for speedAbsolute position 3 INCAngular position 4 Setting: unit for positionPosition error 5 Setting: unit for positionCurrent load 6 %Current power 7 0,1 WCurrent torque 8 0,01 NmI²t load of the motor 9 %Temperature of the motor 10 Degree centigradeTemperature of the converter 11 Degree centigradePosition factor (inc/rev.) 12Speed factor 13 × 10.000reserved 14reserved 15Operating mode (speed or torque) 16 0 = speed
1 = torqueunit for speed 17 see command 64unit for position 18 see command 64
Position controller during rotation 19 0 = deactivated1 = activated
reserved 20reserved 21
position OK 22 0 = no1 = yes
Reference value for the accelera-tion 23 Zero to maximum acceleration
Reference value for the decelera-tion 24 Zero to maximum deceleration
Speed OK 25 0 to 100 × 1%
Speed-Zero limit 26 Zero to maximum speed(unit - see setting - unit for speed)
load limit 27 0 to 100%
Possible errors (SFU_SB2):
SFU_SB2 Error name Cause
100 SFU not initialized The initialization process has not been terminated yet.
1 Incorrect parameter or error in value range
An actual value has been selectedbeyond the range 0 to 22.

!Description of the DNC commands
- 16 - DNC commands SFU 21.71
2.3 Command 66:Clear Error or MessageCommand 66 permits to clear existing errors or messages.
< In order to clear an error, a 0 must be transmitted in the CMD_PAR.< In order to clear a message, a 1 must be transmitted in the CMD_PAR.< In order to clear an error and a message, a 2 must be transmitted in the
CMD_PAR.
Possible errors (SFU_SB2):
SFU_SB2 Error name Cause
1 Incorrect parameter or errorin value range
A function has been selected beyond the range0 to 2.
2.4 Command 67:Controller deactivatedCommand 67 deactivates the control circuits of the SFU and the output stage.Thecurrent supply of the motor is interrupted. The CMD_HBEAT monitoring is stopped.
2.5 Command 68:Controller activatedCommand 68 activates the control circuits of the SFU and the output stage. Thecurrent supply of the motor is guaranteed. The CMD_HBEAT monitoring is started.
Possible errors (SFU_SB2):
SFU_SB2 Error name Cause
100 SFU not initialized The initialization process has not been terminatedyet.
XXX „Error status in the SFU“ See description of the corresponding error.
! Description of the DNC commands
SFU 21.71 DNC commands - 17 -
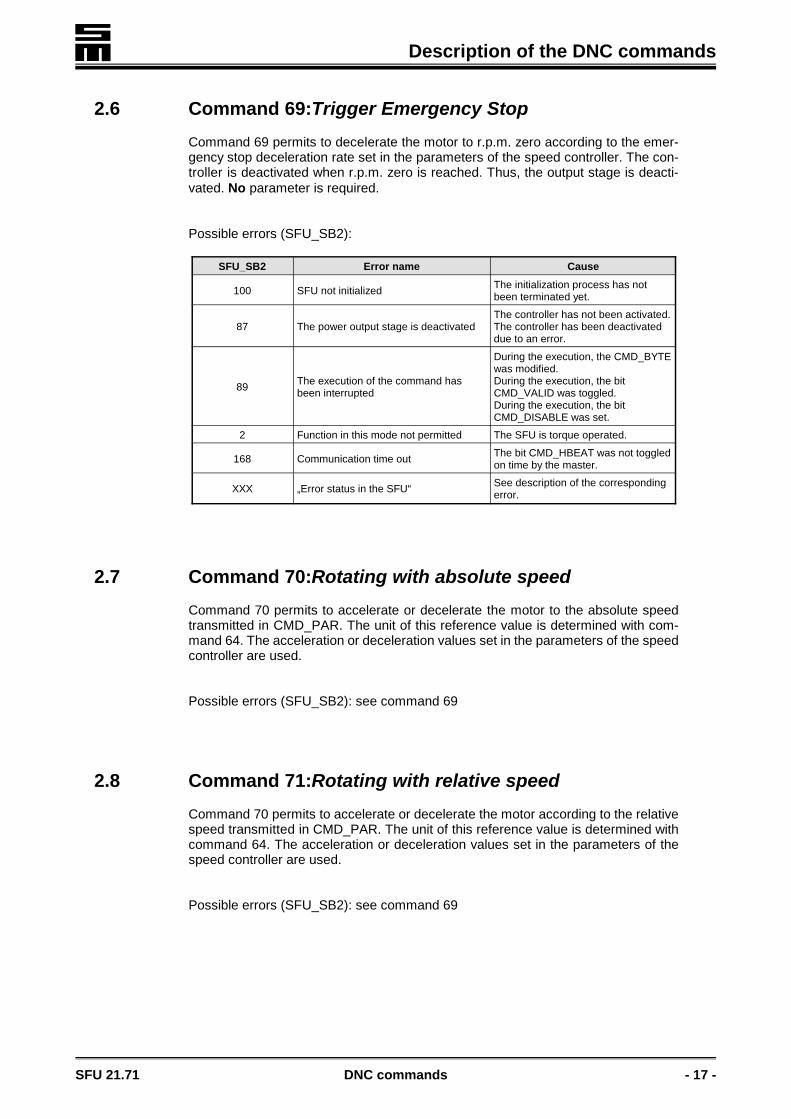
2.6 Command 69:Trigger Emergency StopCommand 69 permits to decelerate the motor to r.p.m. zero according to the emer-gency stop deceleration rate set in the parameters of the speed controller. The con-troller is deactivated when r.p.m. zero is reached. Thus, the output stage is deacti-vated. No parameter is required.
Possible errors (SFU_SB2):
SFU_SB2 Error name Cause
100 SFU not initialized The initialization process has notbeen terminated yet.
87 The power output stage is deactivatedThe controller has not been activated.The controller has been deactivateddue to an error.
89 The execution of the command hasbeen interrupted
During the execution, the CMD_BYTEwas modified.During the execution, the bitCMD_VALID was toggled.During the execution, the bitCMD_DISABLE was set.
2 Function in this mode not permitted The SFU is torque operated.
168 Communication time out The bit CMD_HBEAT was not toggledon time by the master.
XXX „Error status in the SFU“ See description of the correspondingerror.
2.7 Command 70:Rotating with absolute speedCommand 70 permits to accelerate or decelerate the motor to the absolute speedtransmitted in CMD_PAR. The unit of this reference value is determined with com-mand 64. The acceleration or deceleration values set in the parameters of the speedcontroller are used.
Possible errors (SFU_SB2): see command 69
2.8 Command 71:Rotating with relative speedCommand 70 permits to accelerate or decelerate the motor according to the relativespeed transmitted in CMD_PAR. The unit of this reference value is determined withcommand 64. The acceleration or deceleration values set in the parameters of thespeed controller are used.
Possible errors (SFU_SB2): see command 69
!Description of the DNC commands
- 18 - DNC commands SFU 21.71
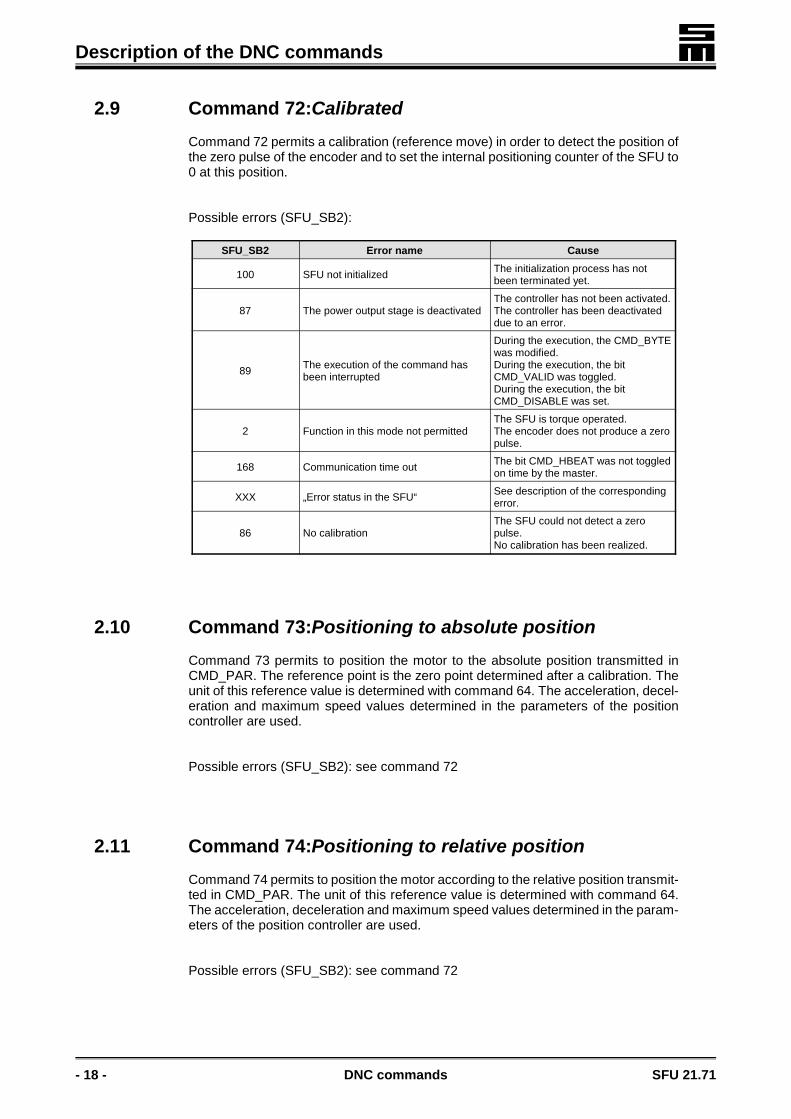
2.9 Command 72:CalibratedCommand 72 permits a calibration (reference move) in order to detect the position ofthe zero pulse of the encoder and to set the internal positioning counter of the SFU to0 at this position.
Possible errors (SFU_SB2):
SFU_SB2 Error name Cause
100 SFU not initialized The initialization process has notbeen terminated yet.
87 The power output stage is deactivatedThe controller has not been activated.The controller has been deactivateddue to an error.
89 The execution of the command hasbeen interrupted
During the execution, the CMD_BYTEwas modified.During the execution, the bitCMD_VALID was toggled.During the execution, the bitCMD_DISABLE was set.
2 Function in this mode not permittedThe SFU is torque operated.The encoder does not produce a zeropulse.
168 Communication time out The bit CMD_HBEAT was not toggledon time by the master.
XXX „Error status in the SFU“ See description of the correspondingerror.
86 No calibrationThe SFU could not detect a zeropulse.No calibration has been realized.
2.10 Command 73:Positioning to absolute positionCommand 73 permits to position the motor to the absolute position transmitted inCMD_PAR. The reference point is the zero point determined after a calibration. Theunit of this reference value is determined with command 64. The acceleration, decel-eration and maximum speed values determined in the parameters of the positioncontroller are used.
Possible errors (SFU_SB2): see command 72
2.11 Command 74:Positioning to relative positionCommand 74 permits to position the motor according to the relative position transmit-ted in CMD_PAR. The unit of this reference value is determined with command 64.The acceleration, deceleration and maximum speed values determined in the param-eters of the position controller are used.
Possible errors (SFU_SB2): see command 72

! Description of the DNC commands
SFU 21.71 DNC commands - 19 -
2.12 Command 75:Reserved
2.13 Command 76:Set torque reference valueCommand 76 permits to set a torque reference value which is transmitted inCMD_PAR. The torque can be preset in 1000 graduations (0,1%) from the maximumtorque of the motor. In order to execute command 76, the SFU must be torque oper-ated. This operating mode is initiated by command 64.The torque is generated passively, i.e. the SFU maintains the state r.p.m.= zero untilthe torque limit value is reached. If the motor is not driven by an external motor, theSFU does not generate a torque.
Possible errors (SFU_SB2):
SFU_SB2 Error name Cause
100 SFU not initialized The initialization process has notbeen terminated.
1 Incorrect parameter or error in valuerange
A torque value has been selected be-yond the range 0 to 1000.
87 The power output stage is deactivatedThe controller has not been activated.The controller has been deactivateddue to an error.
2 Function in this mode not permitted The SFU is speed operated.
XXX „Error status in the SFU“ See description of the correspondingerror.

!Description of the DNC commands
- 20 - DNC commands SFU 21.71

! Appendix: Revisions
SFU 21.71 DNC commands - 21 -
3 Appendix: RevisionsThis appendix describes alterations in comparison with previous versions of the man-ual.
SFU 21.71 DNC Commands021-SFU-bed-DNC-Kommandos/R002-SM-EN-KM/CL/FIS/SHE15. Oktober 2004
Some technical data of the commands 64 and 65 have been modified.