sem0104 sem0104 - aula aula 1144 sistema de múltiplos corpos · sem0104 sem0104 - aula aula 1144...
TRANSCRIPT

SEM0104 SEM0104 -- Aula Aula 1414Sistema de Múltiplos CorposSistema de Múltiplos CorposSistema de Múltiplos CorposSistema de Múltiplos Corpos
Prof. Dr. Marcelo Prof. Dr. Marcelo BeckerBeckerSEM - EESC - USP
•• IntroduçãoIntrodução
• Sist. Multi-corpos no Plano
• Sist. Multi-corpos no Espaço
Sumário da AulaSumário da Aula
• Sist. Multi-corpos no Espaço
• Princípio de Jourdain
• Aplicações
EESC-USP © M. Becker 2/67
IntroduçãoIntrodução
Objetivos:
» Relembrar o procedimento do cálculo de velocidades e acelerações de sistemas de Múltiplos corpos;
3
» Apresentar uma aplicação do procedimento de obtenção das equações de equilíbrio dinâmico e das variáveis nela contidas.
EESC-USP © M. Becker
•• IntroduçãoIntrodução
•• Sist. Sist. MultiMulti--corposcorpos no Planono Plano
• Sist. Multi-corpos no Espaço
Sumário da AulaSumário da Aula
• Sist. Multi-corpos no Espaço
• Princípio de Jourdain
• Aplicações
EESC-USP © M. Becker 4/67
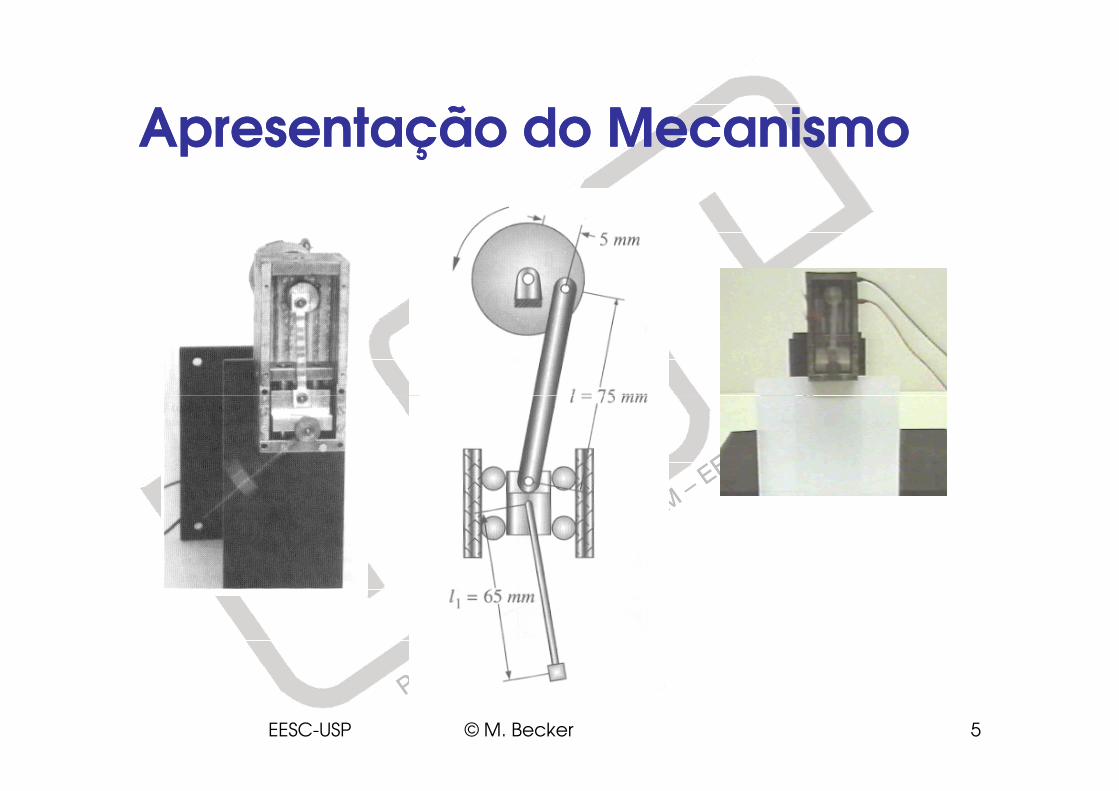
Apresentação do MecanismoApresentação do Mecanismo
5EESC-USP © M. Becker
Cinemática Cinemática do Mecanismodo Mecanismo
1.1 - Sistemas de Referência
1.2 - Matrizes de transformação
1.3 - Escrevendo os ângulos em função do ângulo de acionamento
6
1.4 - Velocidades e Acelerações dos Sistemas Móveis
1.5 - Velocidades e acelerações em relação ao Sistema Inercial
EESC-USP © M. Becker
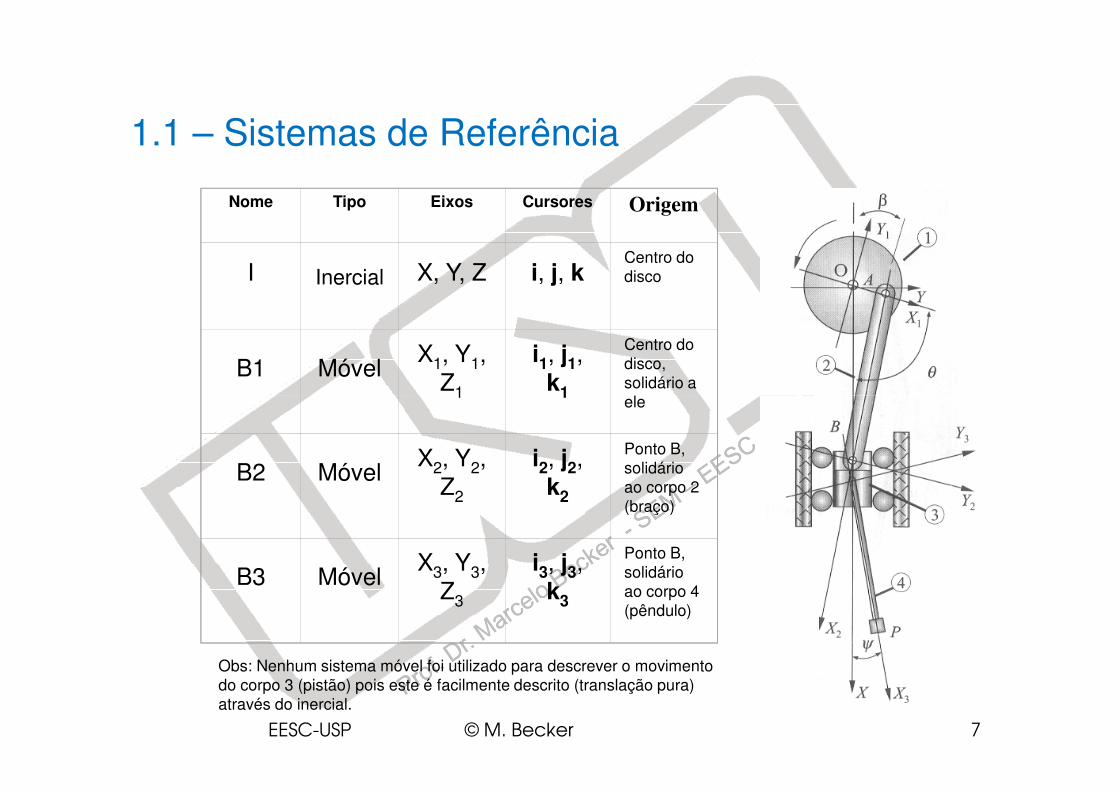
1.1 – Sistemas de Referência
Nome Tipo Eixos Cursores Origem
I Inercial X, Y, Z i, j, kCentro do disco
B1 MóvelX1, Y1,
Z1
i1, j1, k1
Centro do disco, solidário a ele
7
Z1 k1ele
B2 MóvelX2, Y2,
Z2
i2, j2, k2
Ponto B, solidário ao corpo 2 (braço)
B3 MóvelX3, Y3,
Z3
i3, j3, k3
Ponto B, solidário ao corpo 4 (pêndulo)
Obs: Nenhum sistema móvel foi utilizado para descrever o movimento do corpo 3 (pistão) pois este é facilmente descrito (translação pura) através do inercial.
EESC-USP © M. Becker
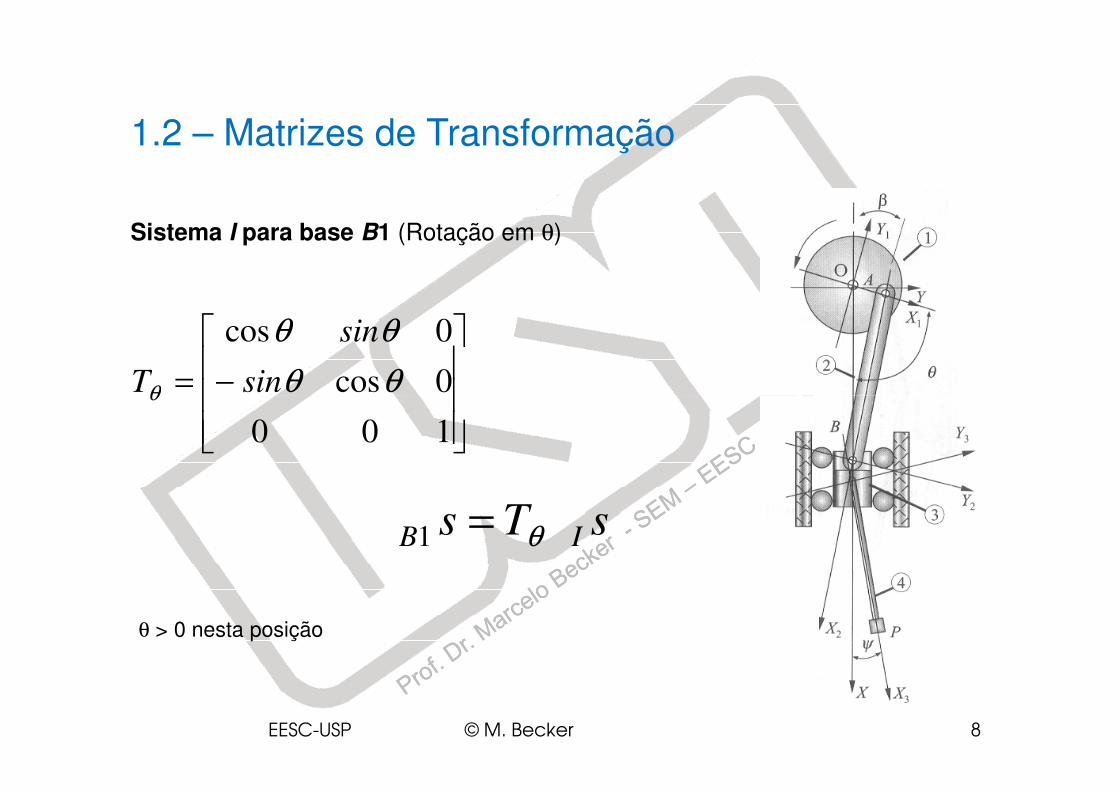
1.2 – Matrizes de Transformação
Sistema I para base B1 (Rotação em θ)
−= 0cos
0cos
θθ
θθ
θ sin
sin
T
8
−=
100
0cosθθθ sinT
sTs IB θ=1
θ > 0 nesta posição
EESC-USP © M. Becker
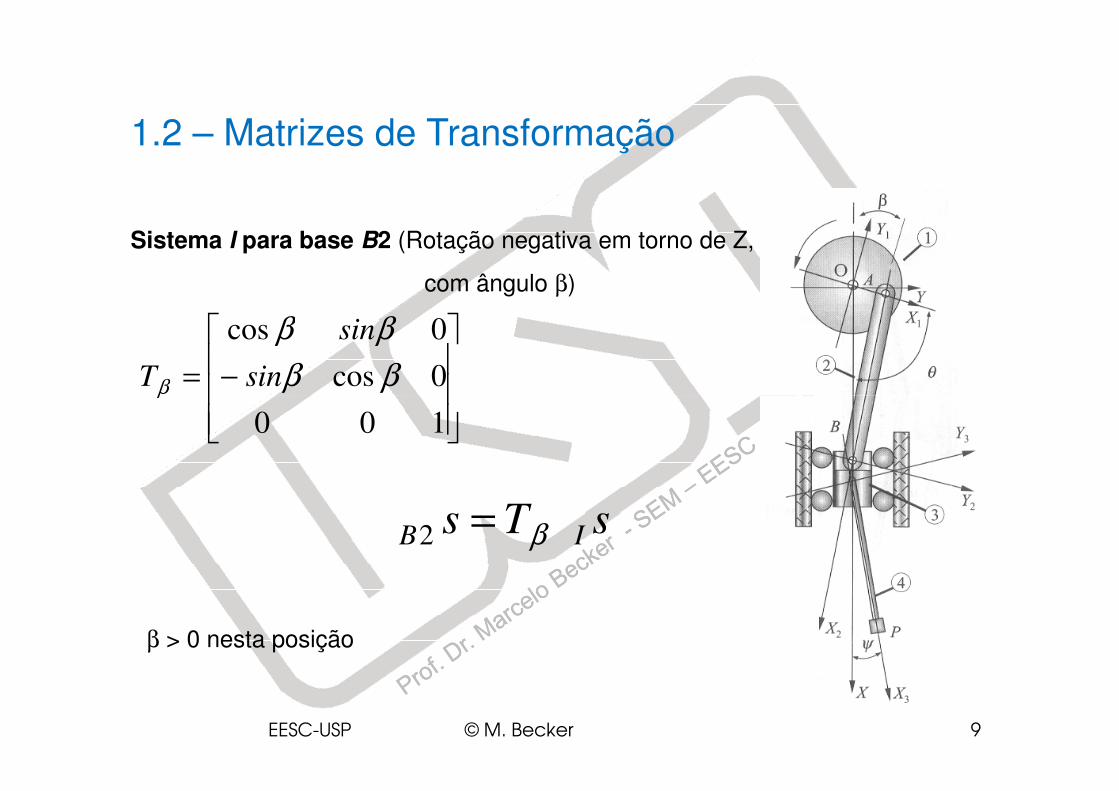
1.2 – Matrizes de Transformação
Sistema I para base B2 (Rotação negativa em torno de Z,
com ângulo β)
−= 0cos
0cos
ββ
ββ
β sin
sin
T
9
100
β
sTs IB β=2
β > 0 nesta posição
EESC-USP © M. Becker
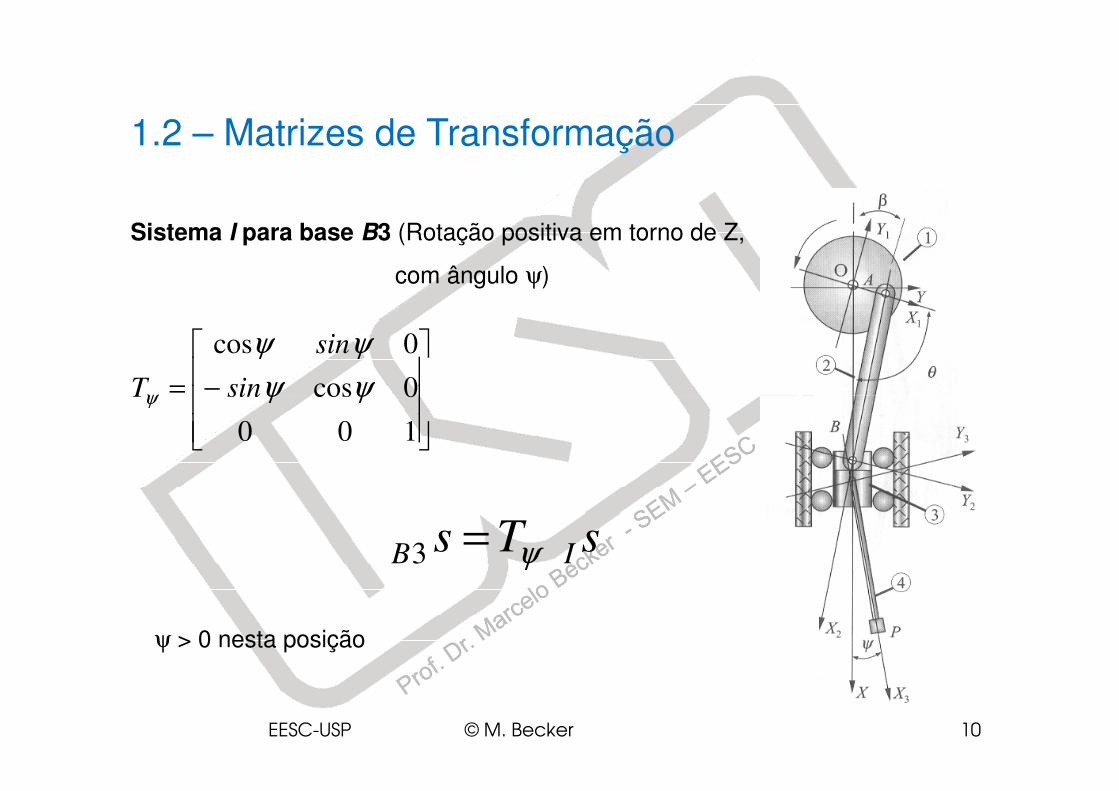
1.2 – Matrizes de Transformação
Sistema I para base B3 (Rotação positiva em torno de Z,
com ângulo ψ)
−= 0cos
0cos
ψψ
ψψ
ψ sin
sin
T
10
−=
100
0cosψψψ sinT
sTs IB ψ=3
ψ > 0 nesta posição
EESC-USP © M. Becker
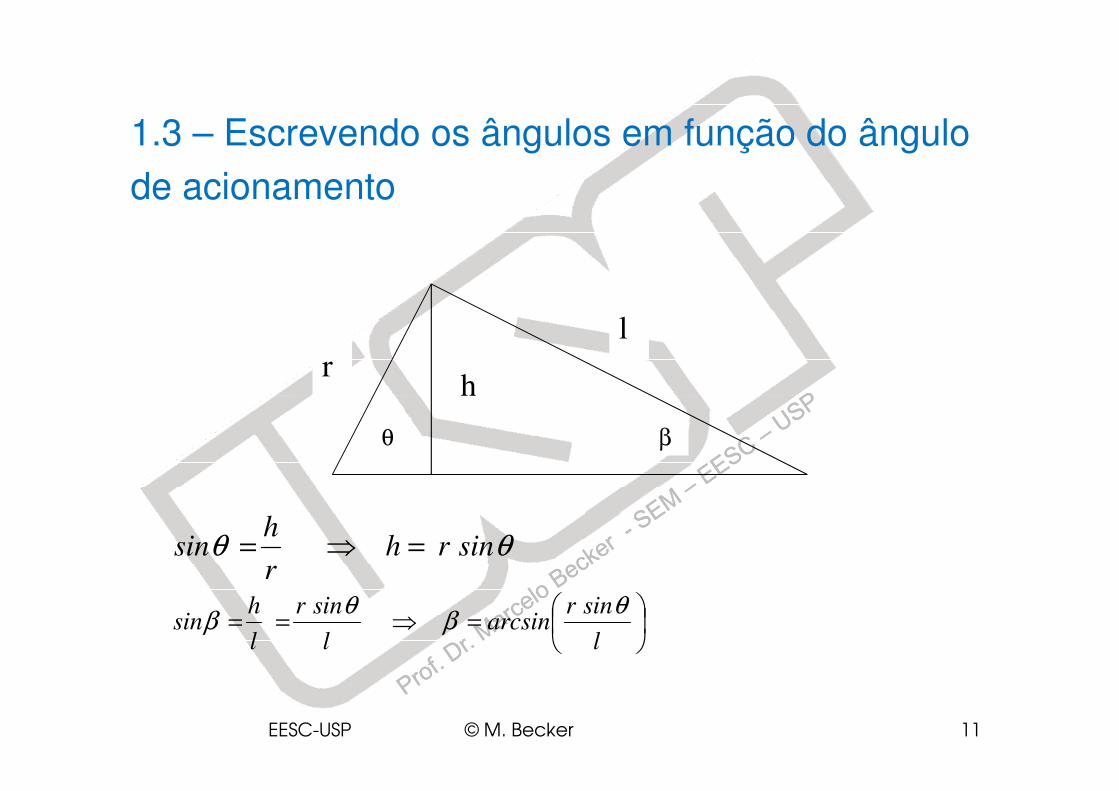
1.3 – Escrevendo os ângulos em função do ângulo de acionamento
r
l
h
11
h
θ β
θθ sinrhr
hsin =⇒=
=⇒==
l
sinrarcsin
l
sinr
l
hsin
θβ
θβ
EESC-USP © M. Becker
1.4 – Velocidades dos Sistemas Móveis
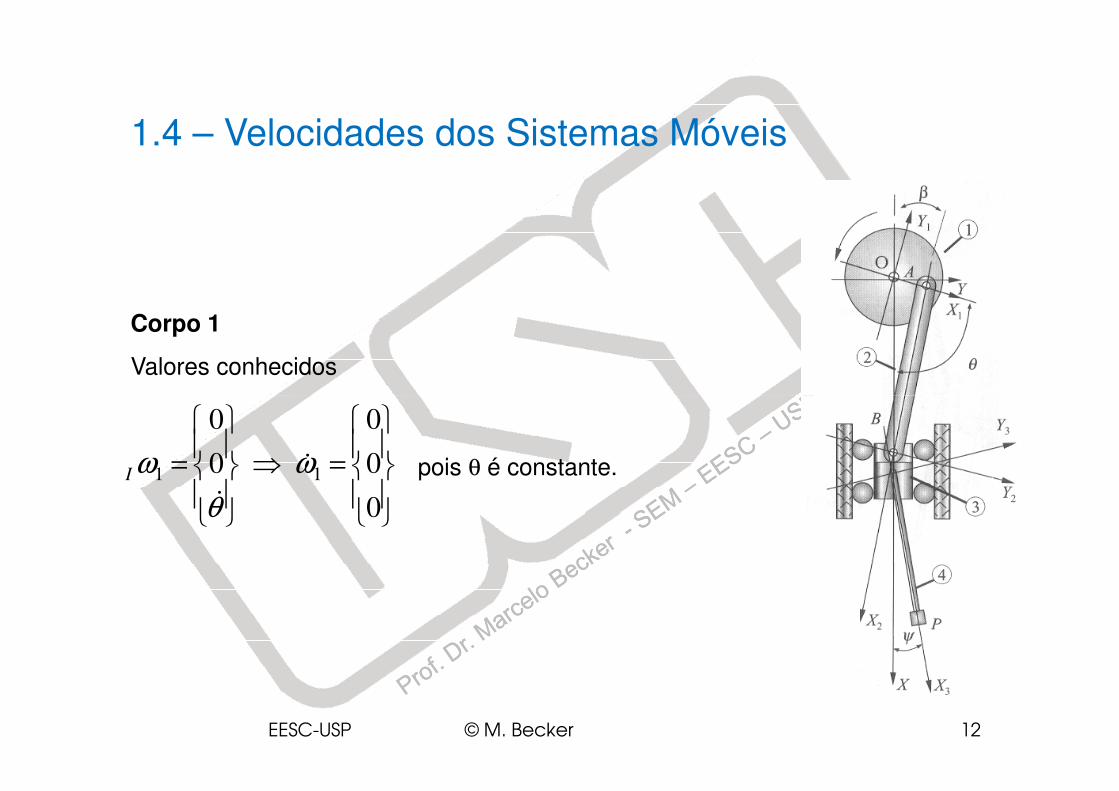
Corpo 1
Valores conhecidos
12
=⇒
=
0
0
0
0
0
11 ω
θ
ω &
&I pois θ é constante.
EESC-USP © M. Becker
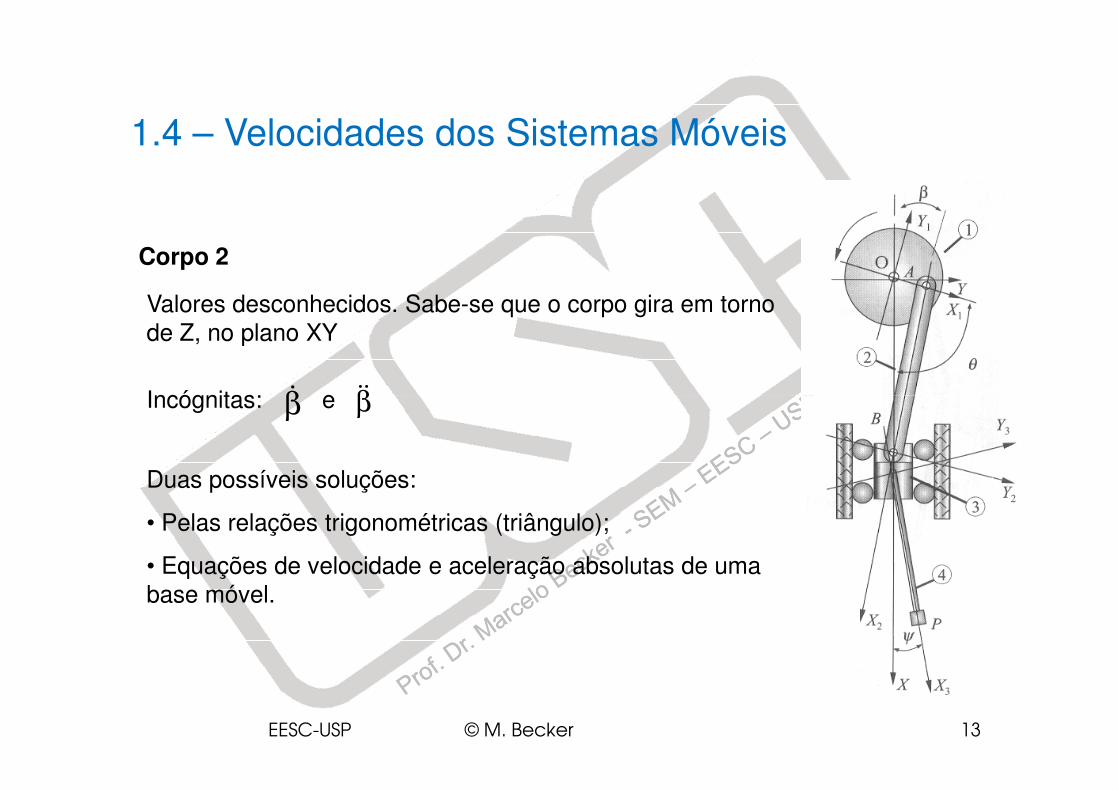
Corpo 2
Valores desconhecidos. Sabe-se que o corpo gira em torno de Z, no plano XY
Incógnitas: β& e β&&
1.4 – Velocidades dos Sistemas Móveis
13
Incógnitas: β& e β&&
Duas possíveis soluções:
• Pelas relações trigonométricas (triângulo);
• Equações de velocidade e aceleração absolutas de uma base móvel.
EESC-USP © M. Becker
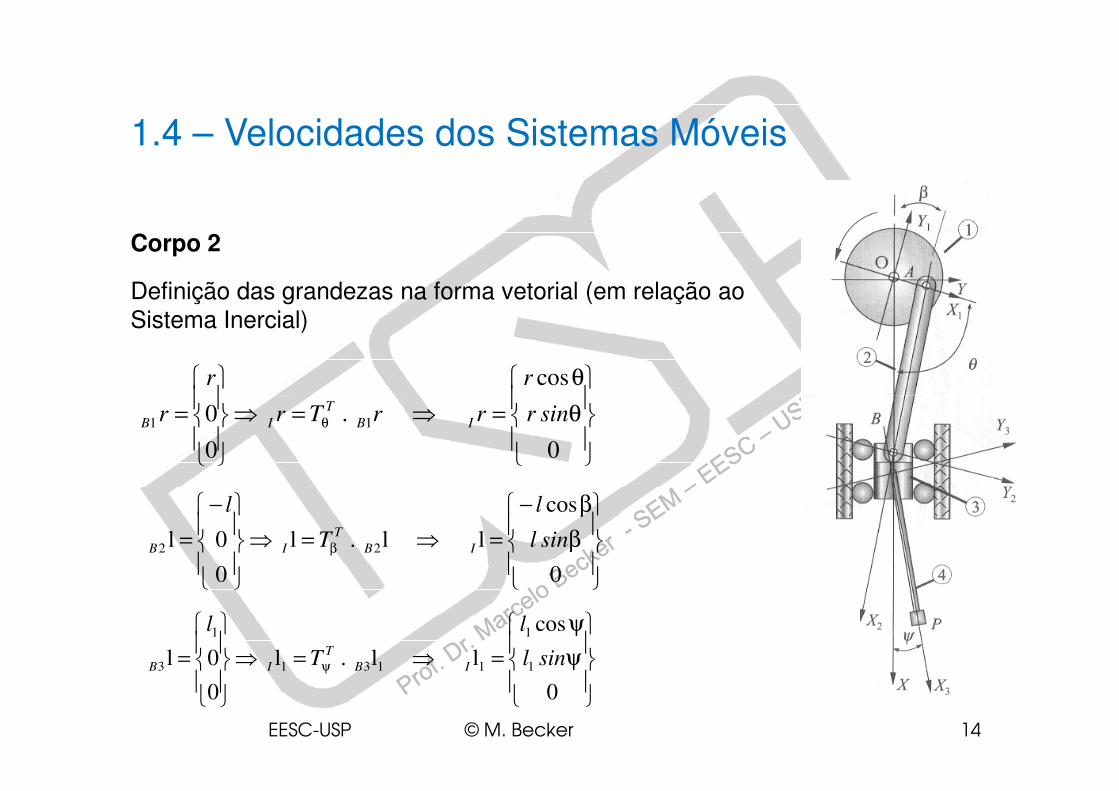
Corpo 2
θ
cosrr
Definição das grandezas na forma vetorial (em relação ao Sistema Inercial)
1.4 – Velocidades dos Sistemas Móveis
14
θ=⇒=⇒
= θ
0
.
0
0 11 sinrrrTrr IB
T
IB
β
β−
=⇒=⇒
−
= β
0
cos
ll.l
0
0l 22 sinl
l
T
l
IB
T
IB
ψ
ψ
=⇒=⇒
= ψ
0
cos
ll.l
0
0l 1
1
1131
1
3 sinl
l
T
l
IB
T
IB
EESC-USP © M. Becker
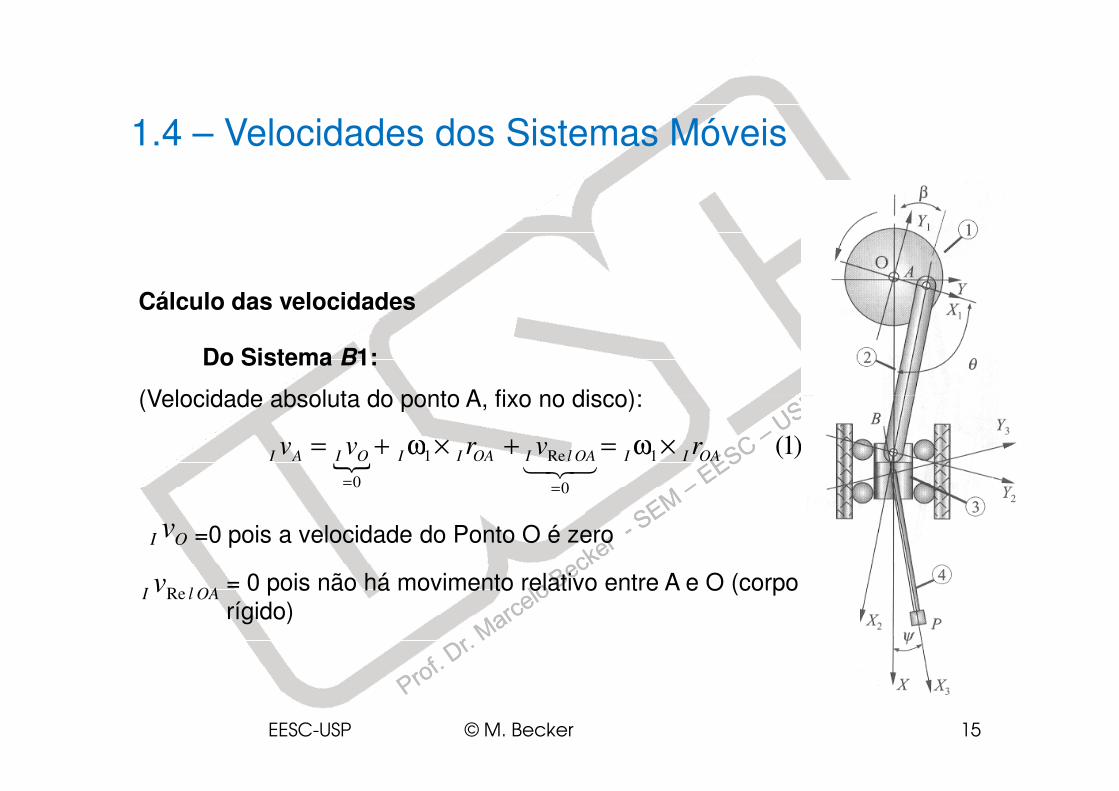
Cálculo das velocidades
Do Sistema B1:
(Velocidade absoluta do ponto A, fixo no disco):
1.4 – Velocidades dos Sistemas Móveis
15
(Velocidade absoluta do ponto A, fixo no disco):
)1(1
0
Re1
0
OAIIOAlIOAIIOIAI rvrvv ×ω=+×ω+=
==321
OI v
OAlI vRe
=0 pois a velocidade do Ponto O é zero
= 0 pois não há movimento relativo entre A e O (corpo rígido)
EESC-USP © M. Becker
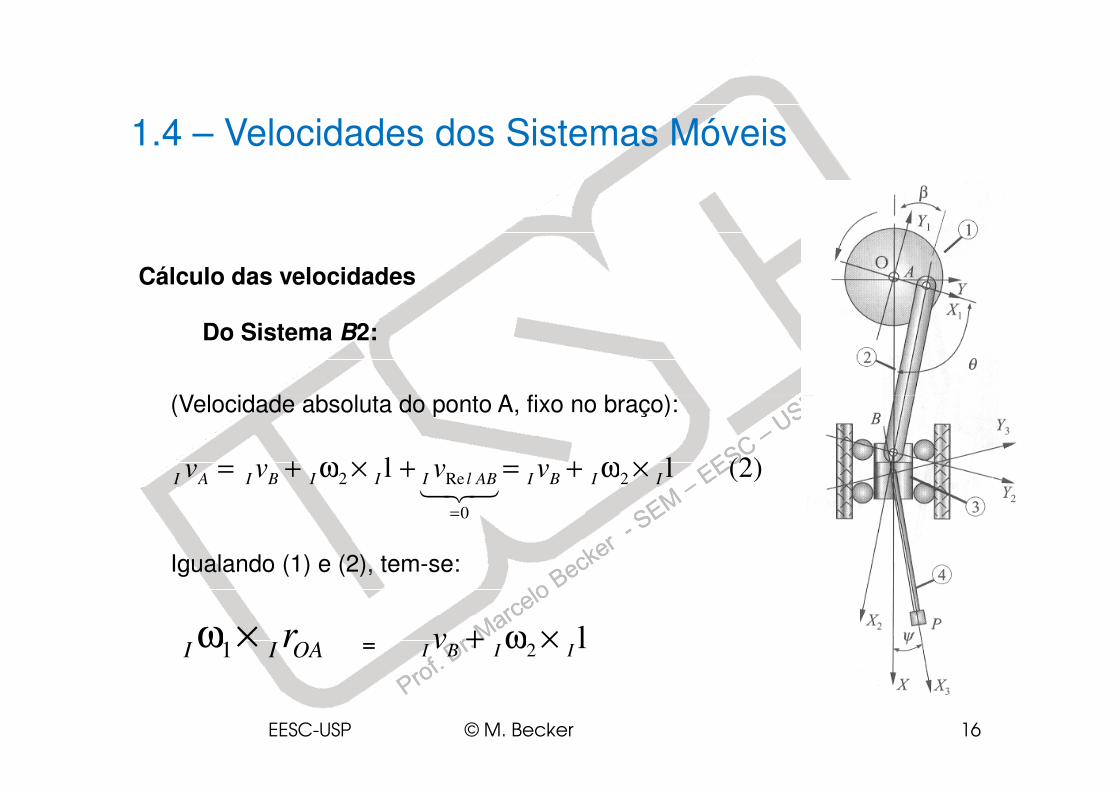
Cálculo das velocidades
Do Sistema B2:
(Velocidade absoluta do ponto A, fixo no braço):
1.4 – Velocidades dos Sistemas Móveis
16
(Velocidade absoluta do ponto A, fixo no braço):
(2)ll 2
0
Re2 IIBIABlIIIBIAI vvvv ×ω+=+×ω+=
=
321
Igualando (1) e (2), tem-se:
OAII r×ω1 l
2 IIBI v ×ω+=
EESC-USP © M. Becker
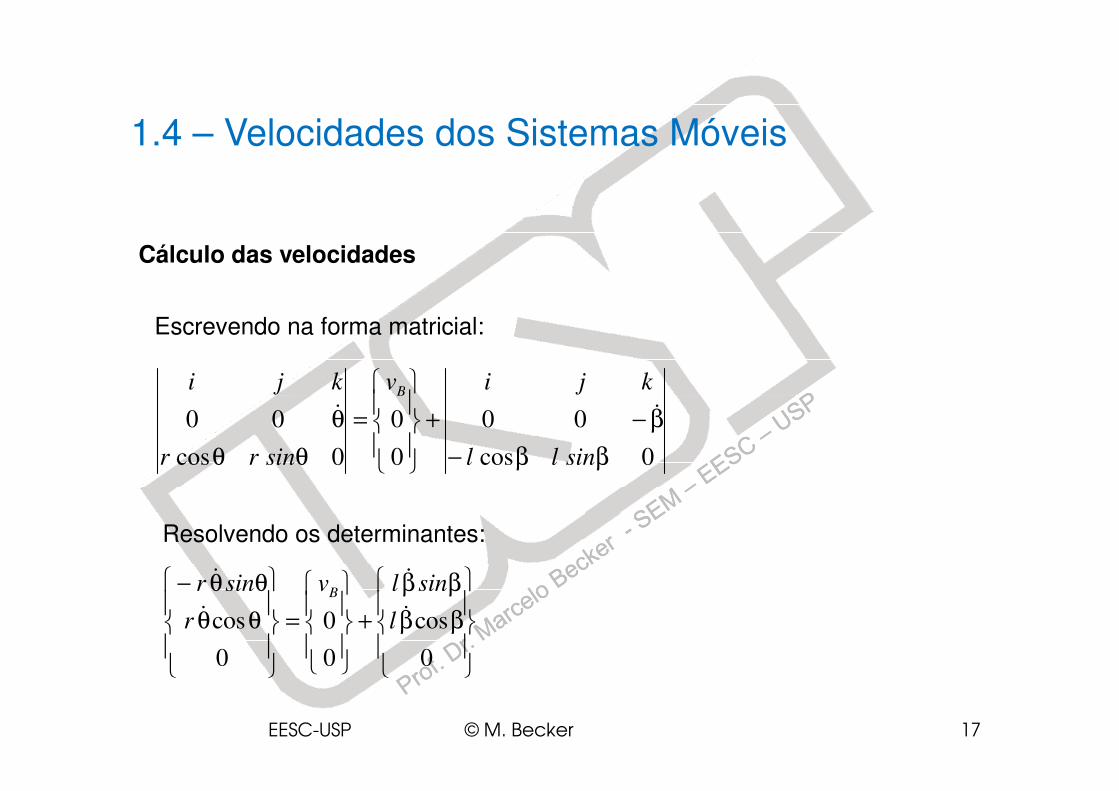
Cálculo das velocidades
Escrevendo na forma matricial:
kjivkji B
1.4 – Velocidades dos Sistemas Móveis
17
0cos
00
0
0
0cos
00
ββ−
β−+
=
θθ
θ
sinllsinrr
B
&&
Resolvendo os determinantes:
ββ
ββ
+
=
θθ
θθ−
0
cos
0
0
0
cos &
&
&
&
l
sinlv
r
sinr B
EESC-USP © M. Becker
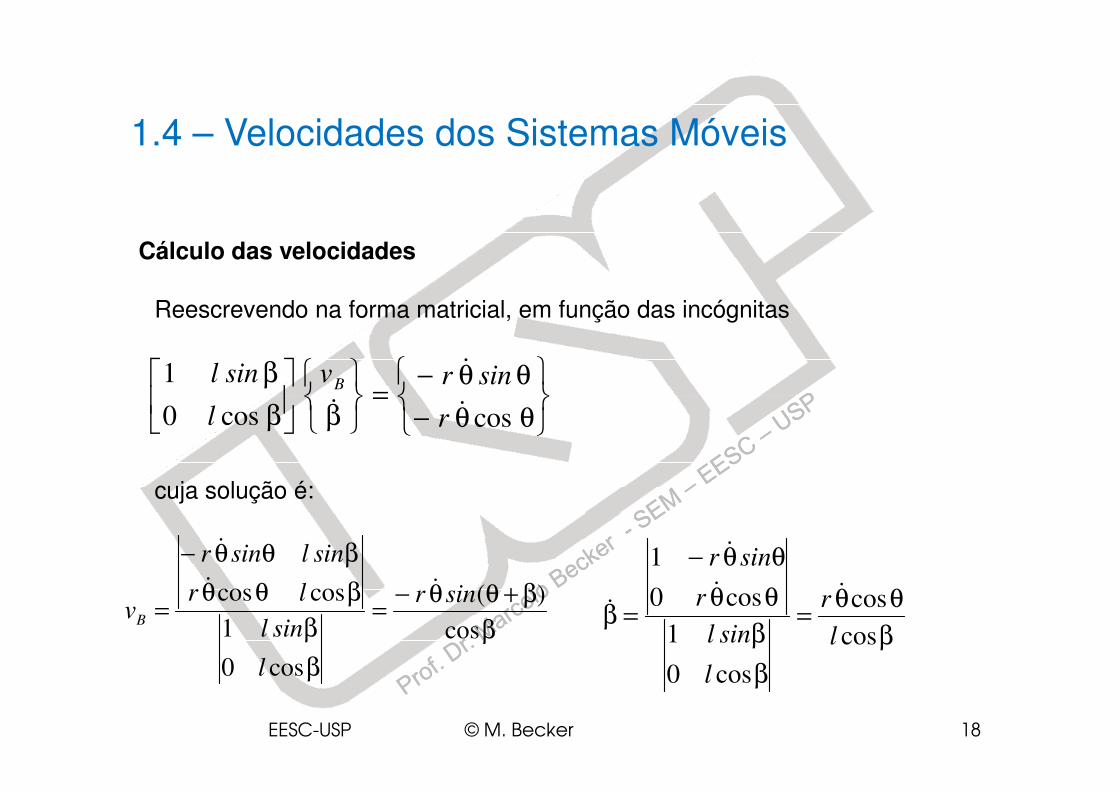
Cálculo das velocidades
Reescrevendo na forma matricial, em função das incógnitas
θθ−
=
β1 &
&
sinrvsinl B
1.4 – Velocidades dos Sistemas Móveis
18
θθ−=
β
β coscos0 && rl
cuja solução é:
β
β+θθ−=
β
β
βθθ
βθθ−
=cos
)(
cos0
1
coscos sinr
l
sinl
lr
sinlsinr
vB
&&
&
β
θθ=
β
β
θθ
θθ−
=βcos
cos
cos0
1
cos0
1
l
r
l
sinl
r
sinr
&&
&
&
EESC-USP © M. Becker
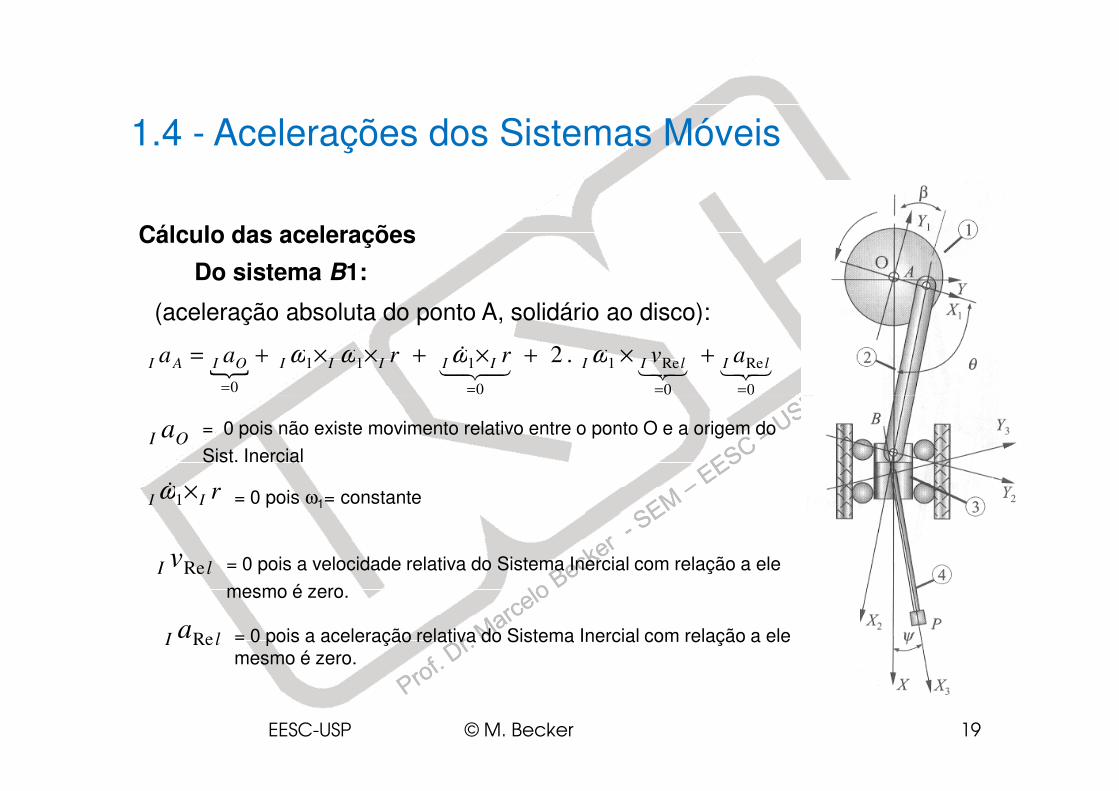
Cálculo das acelerações
Do sistema B1:
(aceleração absoluta do ponto A, solidário ao disco):
32132143421&
0
Re
0
Re1
0
111
0
.2
====
+×+×+××+= lIlIIIIIIIOIAI avrraa ωωωω
1.4 - Acelerações dos Sistemas Móveis
19
000 ===
OI a
rII ×1ω&
lI vRe
lI aRe
= 0 pois não existe movimento relativo entre o ponto O e a origem do
Sist. Inercial
= 0 pois ω1= constante
= 0 pois a velocidade relativa do Sistema Inercial com relação a ele
mesmo é zero.
= 0 pois a aceleração relativa do Sistema Inercial com relação a ele mesmo é zero.
EESC-USP © M. Becker
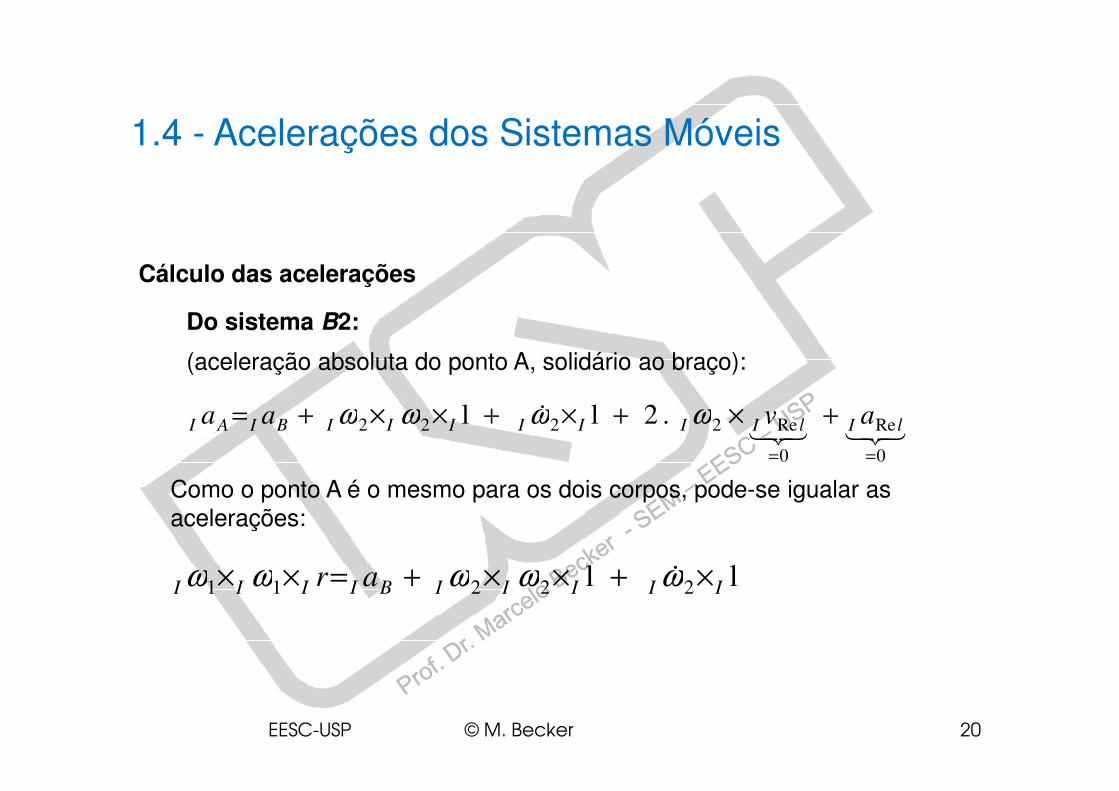
Cálculo das acelerações
Do sistema B2:
(aceleração absoluta do ponto A, solidário ao braço):
1.4 - Acelerações dos Sistemas Móveis
20
321321&
0
Re
0
Re2222 .2ll
==
+×+×+××+= lIlIIIIIIIBIAI avaa ωωωω
Como o ponto A é o mesmo para os dois corpos, pode-se igualar as acelerações:
ll 22211 IIIIIBIIII ar ×+××+=×× ωωωωω &
EESC-USP © M. Becker
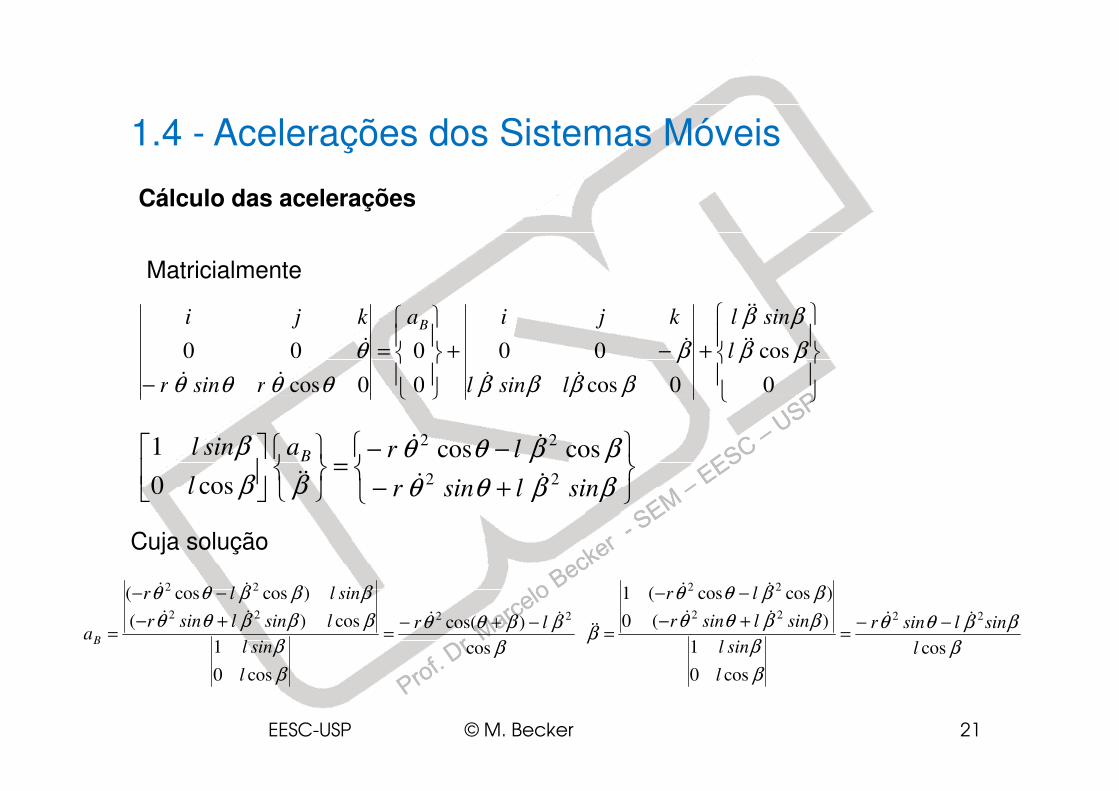
Cálculo das acelerações
Matricialmente
+−+
=
− 0
cos
0cos
00
0
0
0cos
00 ββ
ββ
ββββ
β
θθθθ
θ &&
&&
&&
&
&&
& l
sinl
lsinl
kjia
rsinr
kji B
1.4 - Acelerações dos Sistemas Móveis
21
− 00cos00cos ββββθθθθ lsinlrsinr
+−
−−=
ββθθ
ββθθ
ββ
β
sinlsinr
lra
l
sinl B
22
22coscos
cos0
1
&&
&&
&&
Cuja solução
β
ββθθ
β
β
βββθθ
βββθθ
cos
)cos(
cos0
1
cos)(
)coscos(
2222
22
&&&&
&&
lr
l
sinl
lsinlsinr
sinllr
aB
−+−=
+−
−−
=β
ββθθ
β
β
ββθθ
ββθθ
βcos
cos0
1
)(0
)coscos(1
2222
22
l
sinlsinr
l
sinl
sinlsinr
lr
&&&&
&&
&& −−=
+−
−−
=
EESC-USP © M. Becker
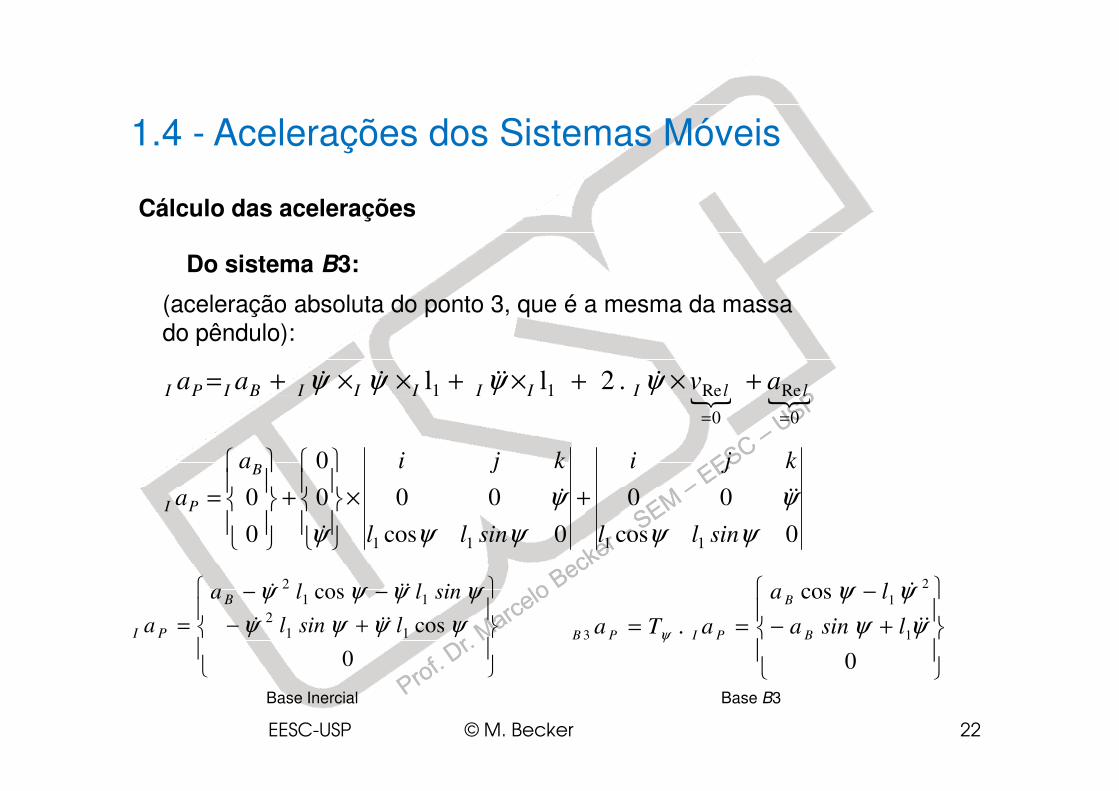
Cálculo das acelerações
Do sistema B3:
(aceleração absoluta do ponto 3, que é a mesma da massa do pêndulo):
ReRe11 .2ll +×+×+××+= llIIIIIIBIPI avaa ψψψψ &&&&&
1.4 - Acelerações dos Sistemas Móveis
22
0
Re
0
Re11
==
llIIIIIIBIPI
0cos
00
0cos
000
0
0
0
1111 ψψ
ψ
ψψ
ψ
ψ sinll
kji
sinll
kjia
a
B
PI&&&
&
+×
+
=
+−
−−
=
0
cos
cos
11
2
11
2
ψψψψ
ψψψψ
lsinl
sinlla
a
B
PI&&&
&&&
+−
−
==
0
cos
.1
2
1
3ψψ
ψψ
ψ&&
&
lsina
la
aTa B
B
PIPB
Base Inercial Base B3
EESC-USP © M. Becker
Dinâmica Dinâmica do Mecanismodo Mecanismo
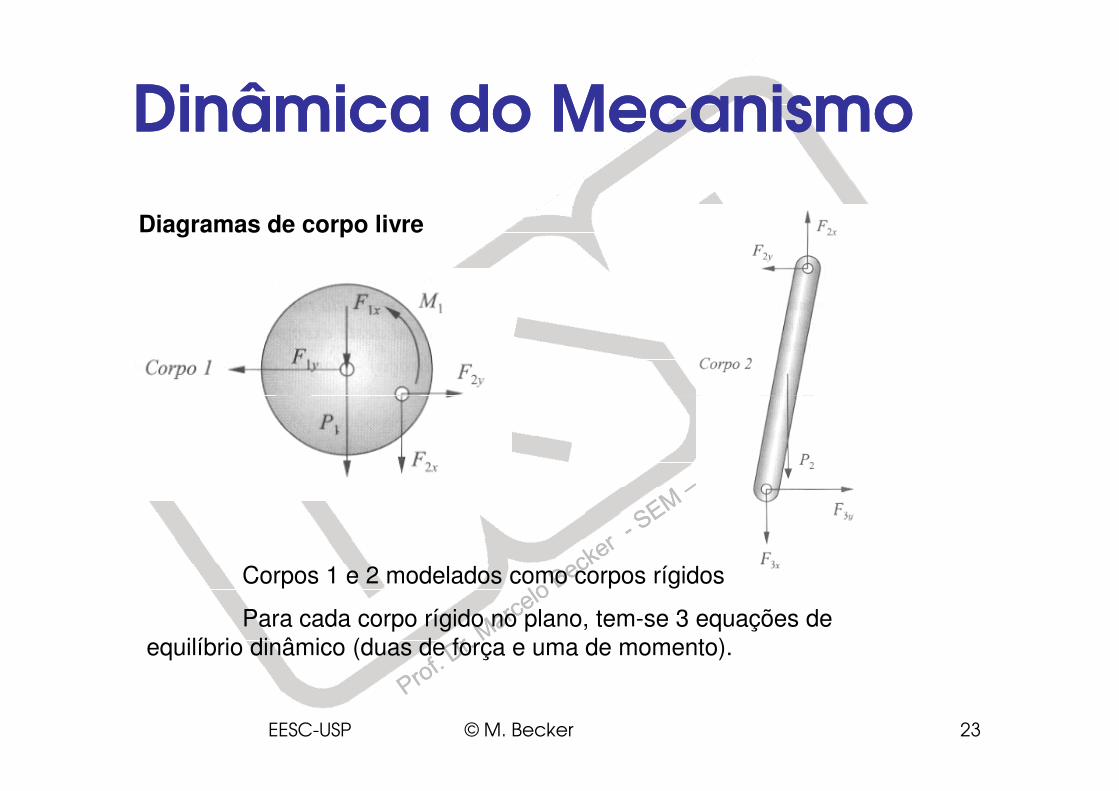
Diagramas de corpo livre
23
Corpos 1 e 2 modelados como corpos rígidos
Para cada corpo rígido no plano, tem-se 3 equações de equilíbrio dinâmico (duas de força e uma de momento).
EESC-USP © M. Becker
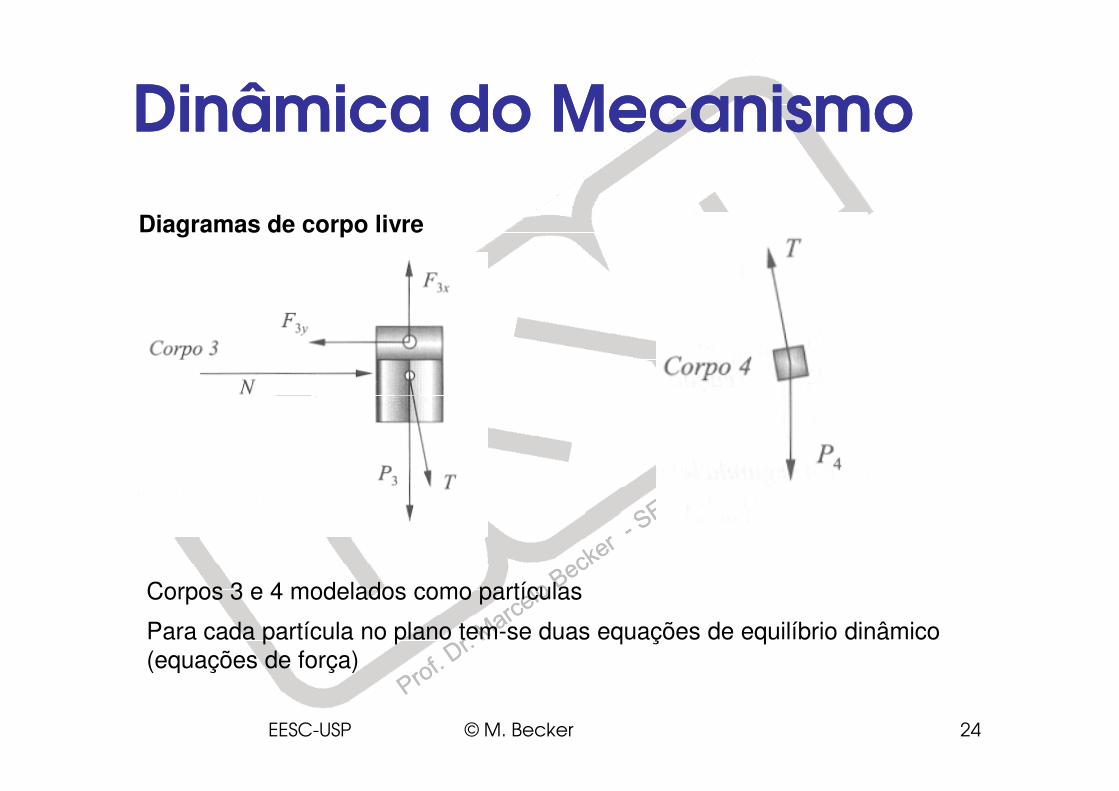
Diagramas de corpo livre
Dinâmica Dinâmica do Mecanismodo Mecanismo
24
Corpos 3 e 4 modelados como partículas
Para cada partícula no plano tem-se duas equações de equilíbrio dinâmico (equações de força)
EESC-USP © M. Becker
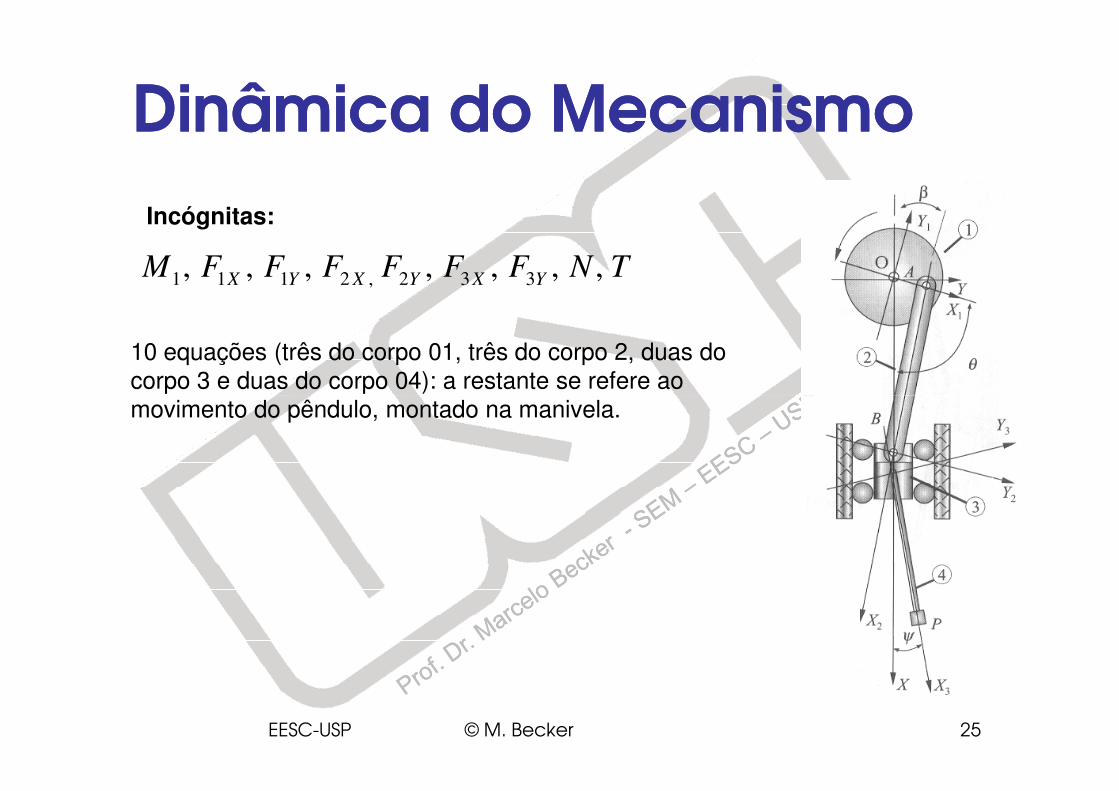
Incógnitas:
TNFFFFFFM YXYXYX ,,,,,,, 332,2111
10 equações (três do corpo 01, três do corpo 2, duas do corpo 3 e duas do corpo 04): a restante se refere ao
Dinâmica Dinâmica do Mecanismodo Mecanismo
25
movimento do pêndulo, montado na manivela.
EESC-USP © M. Becker
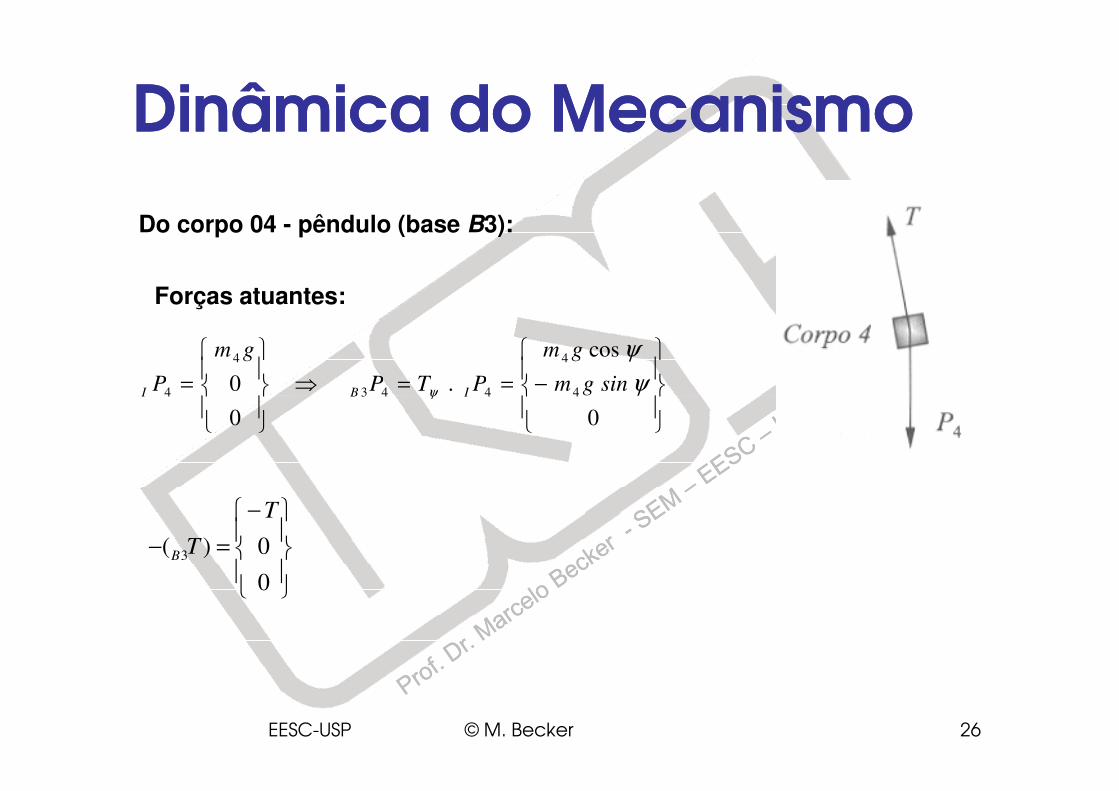
Do corpo 04 - pêndulo (base B3):
Forças atuantes:
−==⇒
=
cos
.0 4
4
443
4
4 ψ
ψ
ψ singm
gm
PTP
gm
P IBI
Dinâmica Dinâmica do Mecanismodo Mecanismo
26
−==⇒
=
0
.
0
0 44434 ψψ singmPTPP IBI
−
=−
0
0)( 3
T
TB
EESC-USP © M. Becker
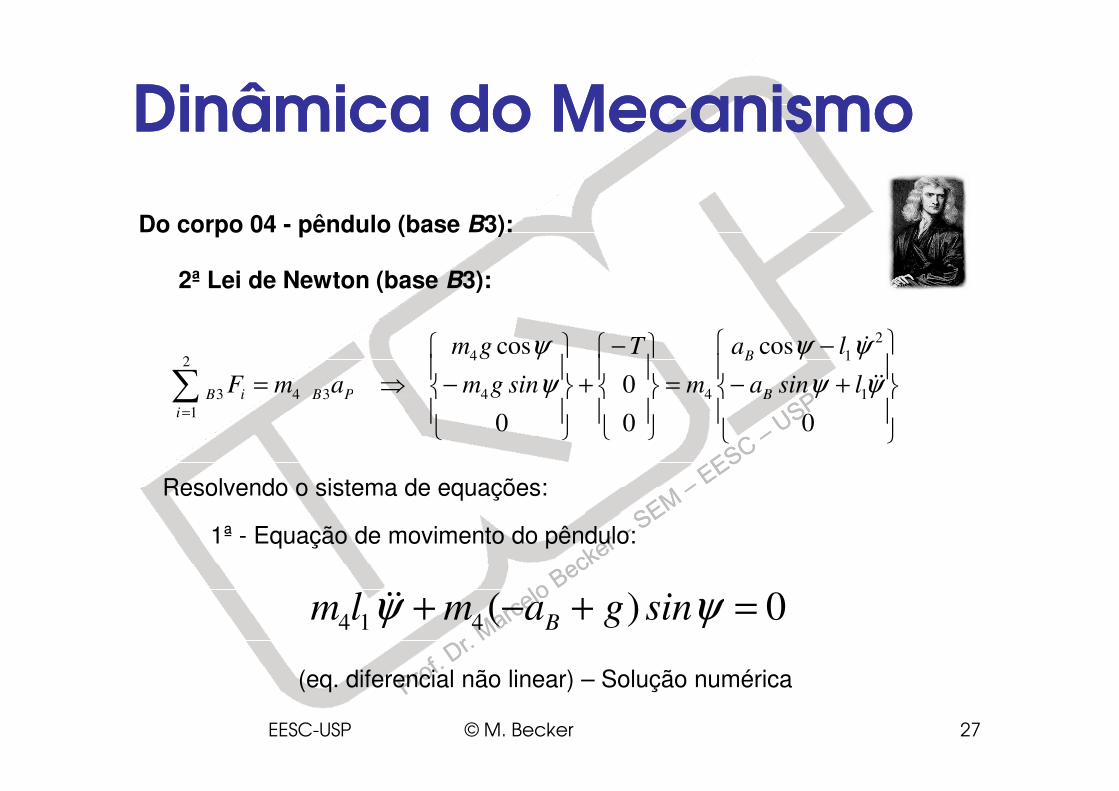
2ª Lei de Newton (base B3):
Do corpo 04 - pêndulo (base B3):
+−
−
=
−
+
−⇒=∑cos
0
cos
1
2
1
4
2
4
4
343ψψ
ψψ
ψ
ψ
&&
&
lsina
la
m
T
singm
gm
amF B
B
PBiB
Dinâmica Dinâmica do Mecanismodo Mecanismo
27
+−=
+
−⇒=∑=
00
0
0
14
1
4343ψψψ &&lsinamsingmamF B
i
PBiB
Resolvendo o sistema de equações:
1ª - Equação de movimento do pêndulo:
0)(414
=+−+ ψψ singamlm B&&
(eq. diferencial não linear) – Solução numérica
EESC-USP © M. Becker
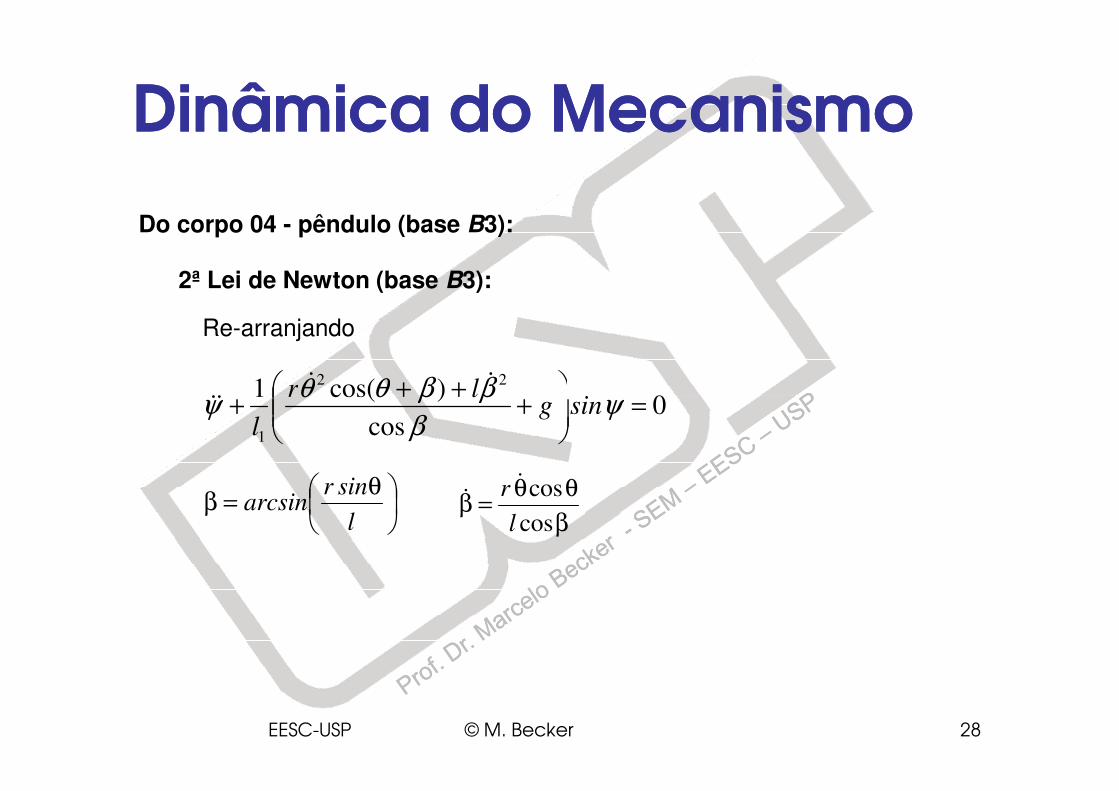
2ª Lei de Newton (base B3):
Do corpo 04 - pêndulo (base B3):
Re-arranjando
0)cos(1
22
=
+++
+ ψββθθ
ψ singlr &&
&&
Dinâmica Dinâmica do Mecanismodo Mecanismo
28
0cos
)cos(1
1
=
+
+++ ψ
β
ββθθψ sing
lr
l&&
θ=β
l
sinrarcsin
β
θθ=β
cos
cos
l
r &&
EESC-USP © M. Becker
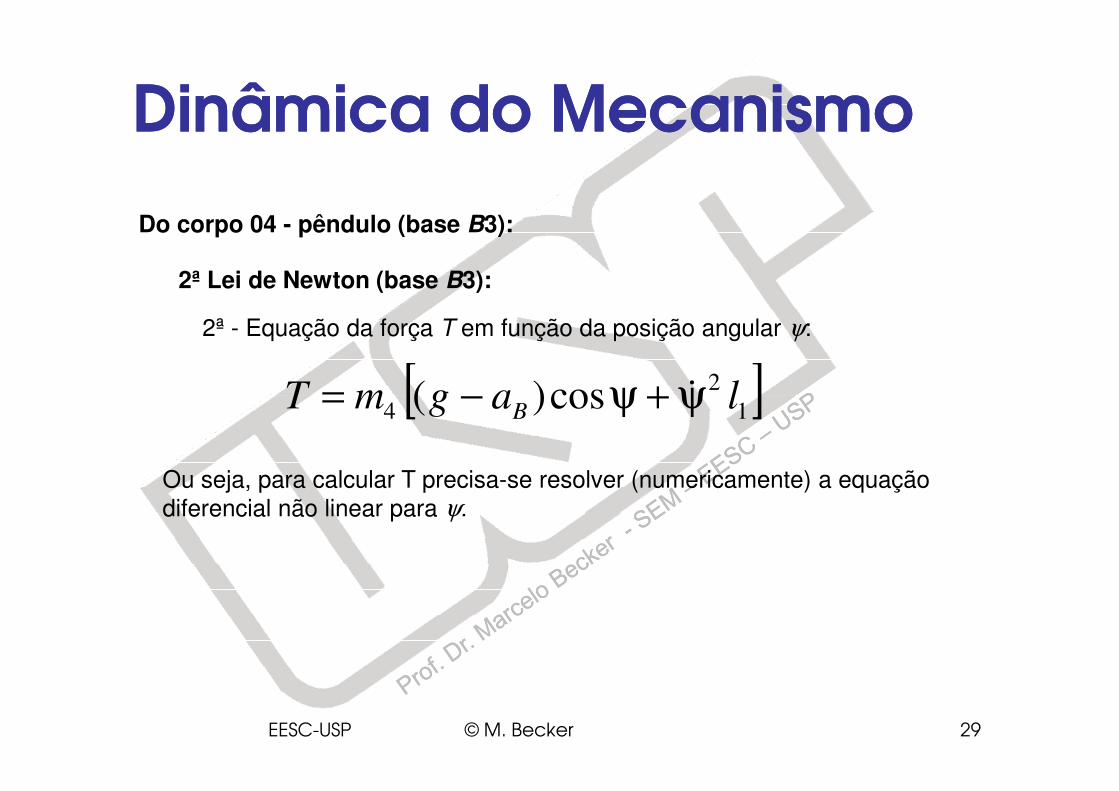
2ª Lei de Newton (base B3):
Do corpo 04 - pêndulo (base B3):
2ª - Equação da força T em função da posição angular ψ:
[ ]2cos)( lagmT ψ+ψ−= &
Dinâmica Dinâmica do Mecanismodo Mecanismo
29
[ ]14 cos)( lagmT B ψ+ψ−= &
Ou seja, para calcular T precisa-se resolver (numericamente) a equação diferencial não linear para ψ.
EESC-USP © M. Becker
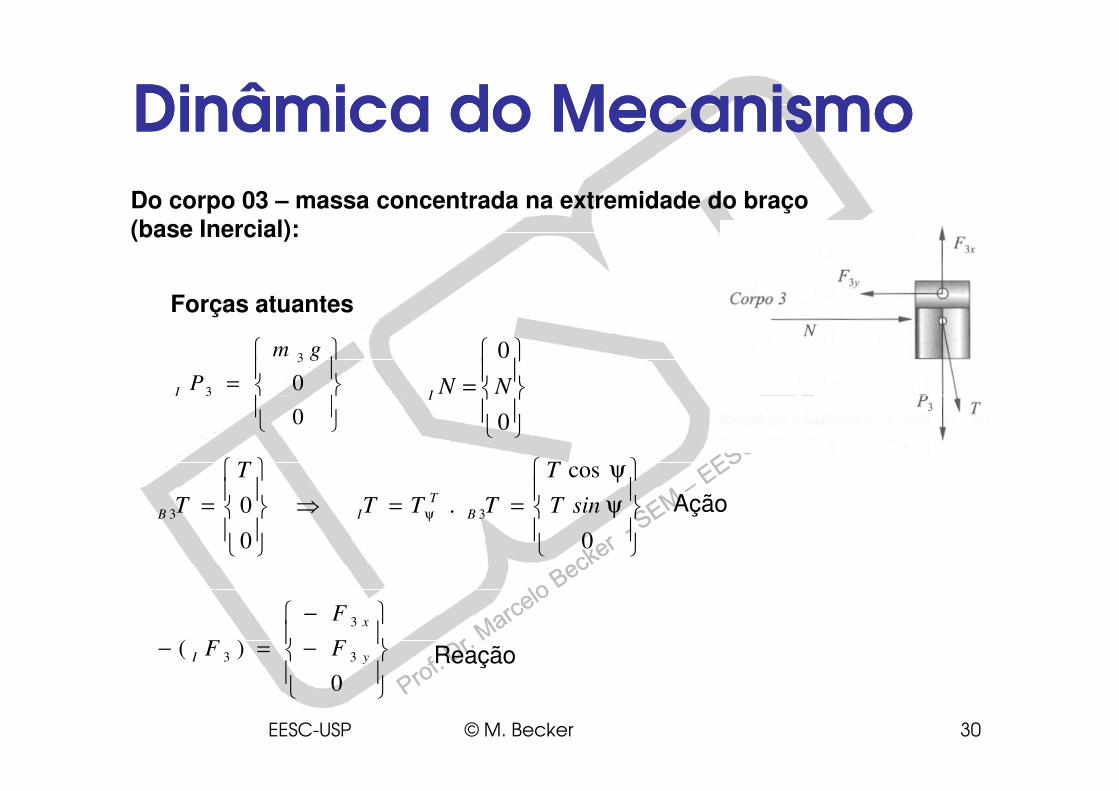
Do corpo 03 – massa concentrada na extremidade do braço (base Inercial):
Forças atuantes
= 0
3
3
gm
PI
=
0
NNI
Dinâmica Dinâmica do Mecanismodo Mecanismo
30
0
3I
ψ
ψ
==⇒
= ψ
0
cos
.
0
0 33 sinT
T
TTT
T
T B
T
IB
=
0
NNI
−
−
=−
0
)(3
3
3 y
x
I F
F
F Reação
Ação
EESC-USP © M. Becker
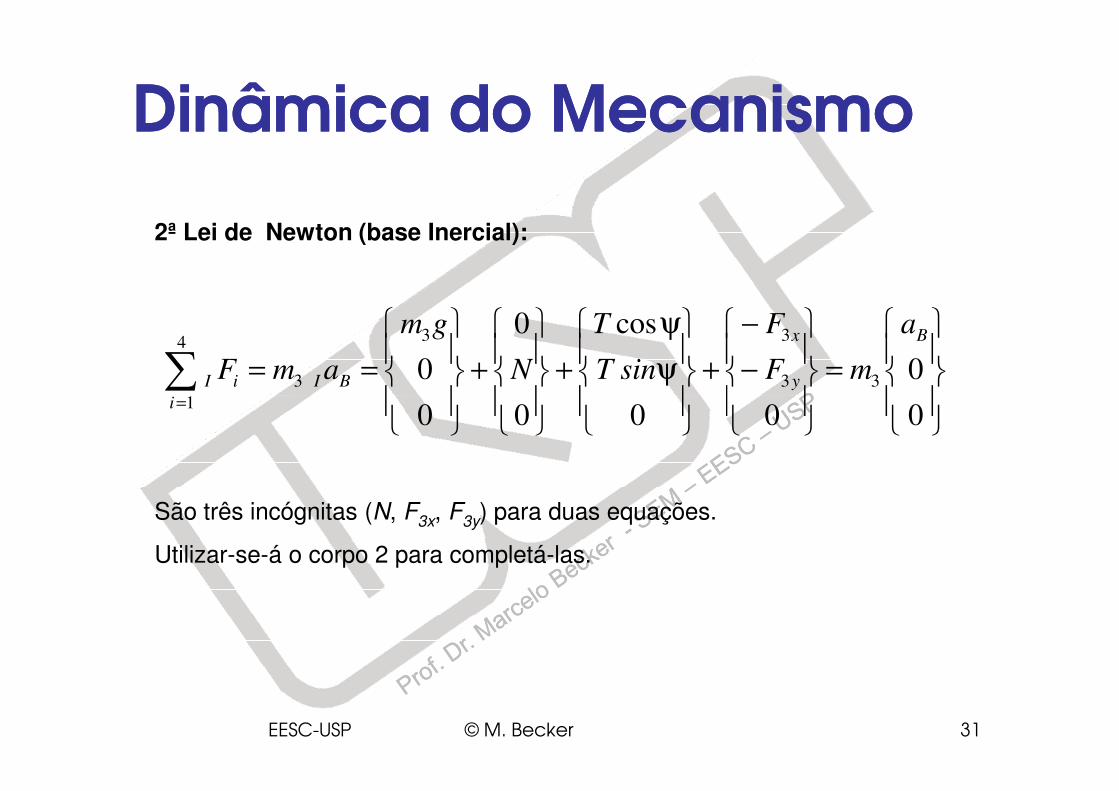
2ª Lei de Newton (base Inercial):
=
−
−
+
ψ
ψ
+
+
==∑=
0
cos0
0 33
34
1
3
3
B
y
x
i
BIiI
a
mF
F
sinT
T
N
gm
amF
Dinâmica Dinâmica do Mecanismodo Mecanismo
31
∑=
000001i
São três incógnitas (N, F3x, F3y) para duas equações.
Utilizar-se-á o corpo 2 para completá-las.
EESC-USP © M. Becker
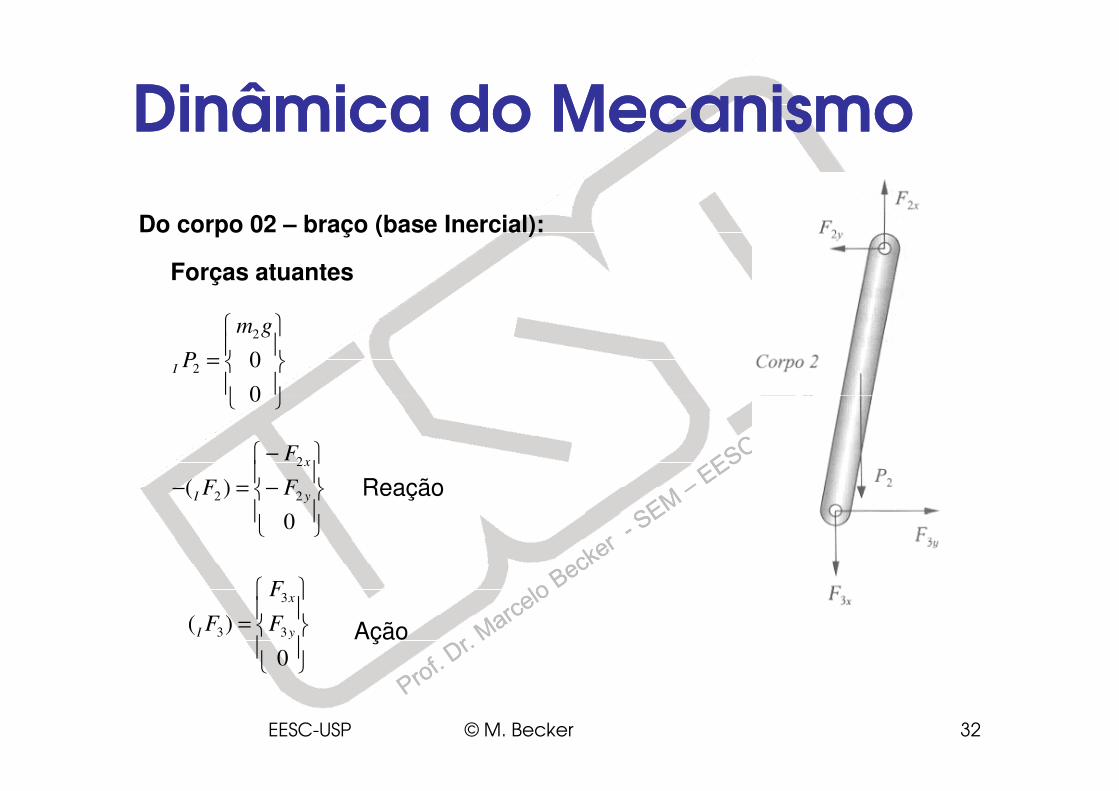
Do corpo 02 – braço (base Inercial):
Forças atuantes
=
0
0
2
2
gm
PI
Dinâmica Dinâmica do Mecanismodo Mecanismo
32
0
−
−
=−
0
)( 2
2
2 y
x
I F
F
F
=
0
)( 3
3
3 y
x
I F
F
F Ação
Reação
EESC-USP © M. Becker
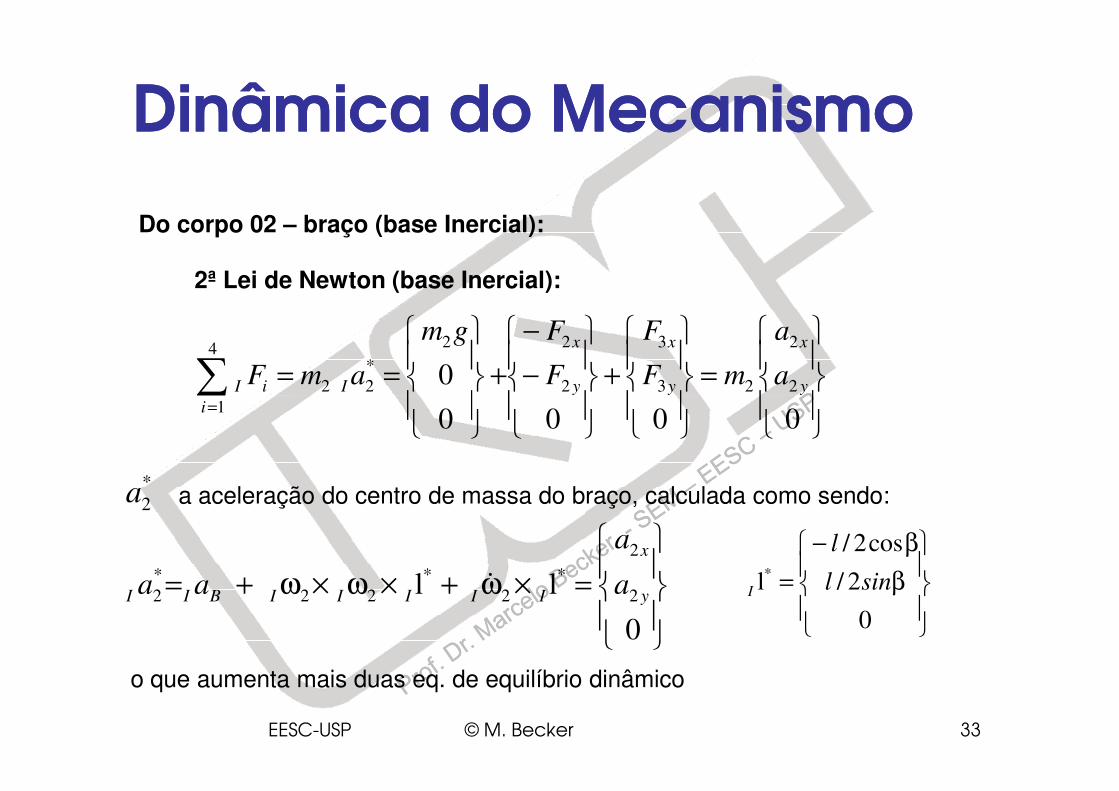
Do corpo 02 – braço (base Inercial):
2ª Lei de Newton (base Inercial):
=
+
−
−
+
==∑=
0 2
2
23
3
2
24 2
*
22 y
x
y
x
y
x
IiI a
a
mF
F
F
Fgm
amF
Dinâmica Dinâmica do Mecanismodo Mecanismo
33
∑=
00001i
*
2a a aceleração do centro de massa do braço, calculada como sendo:
=×ω+×ω×ω+=
0
ll2
2
*
2
*
22
*
2 y
x
IIIIIBII a
a
aa &
β
β−
=
0
2/
cos2/
l*
sinl
l
I
o que aumenta mais duas eq. de equilíbrio dinâmico
EESC-USP © M. Becker
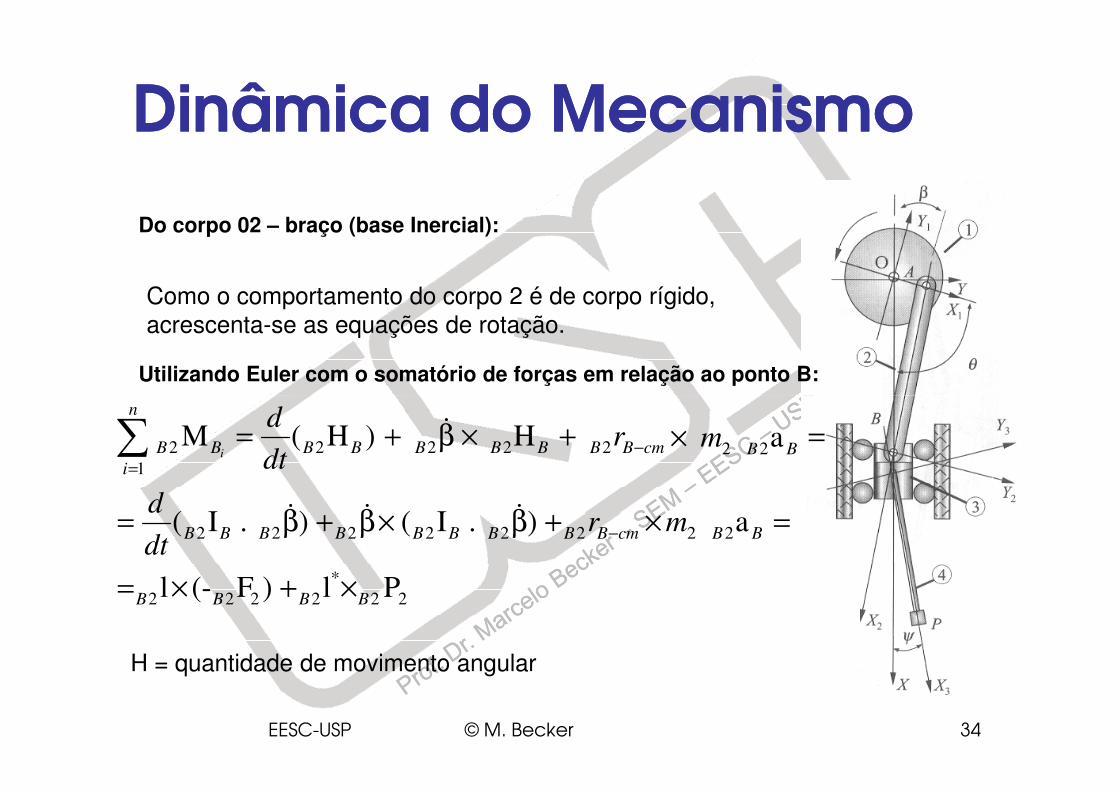
Do corpo 02 – braço (base Inercial):
Como o comportamento do corpo 2 é de corpo rígido, acrescenta-se as equações de rotação.
Utilizando Euler com o somatório de forças em relação ao ponto B:
Dinâmica Dinâmica do Mecanismodo Mecanismo
34
22
*
2222
22222222
22
1
22222
Pl)F(-l
a).I().I(
aH)H(M
BBBB
BBcmBBBBBBBBB
BB
n
i
cmBBBBBBBBB
mrdt
d
mrdt
di
×+×=
=×+β×β+β=
=×+×β+=
−
=−∑
&&&
&
H = quantidade de movimento angular
EESC-USP © M. Becker
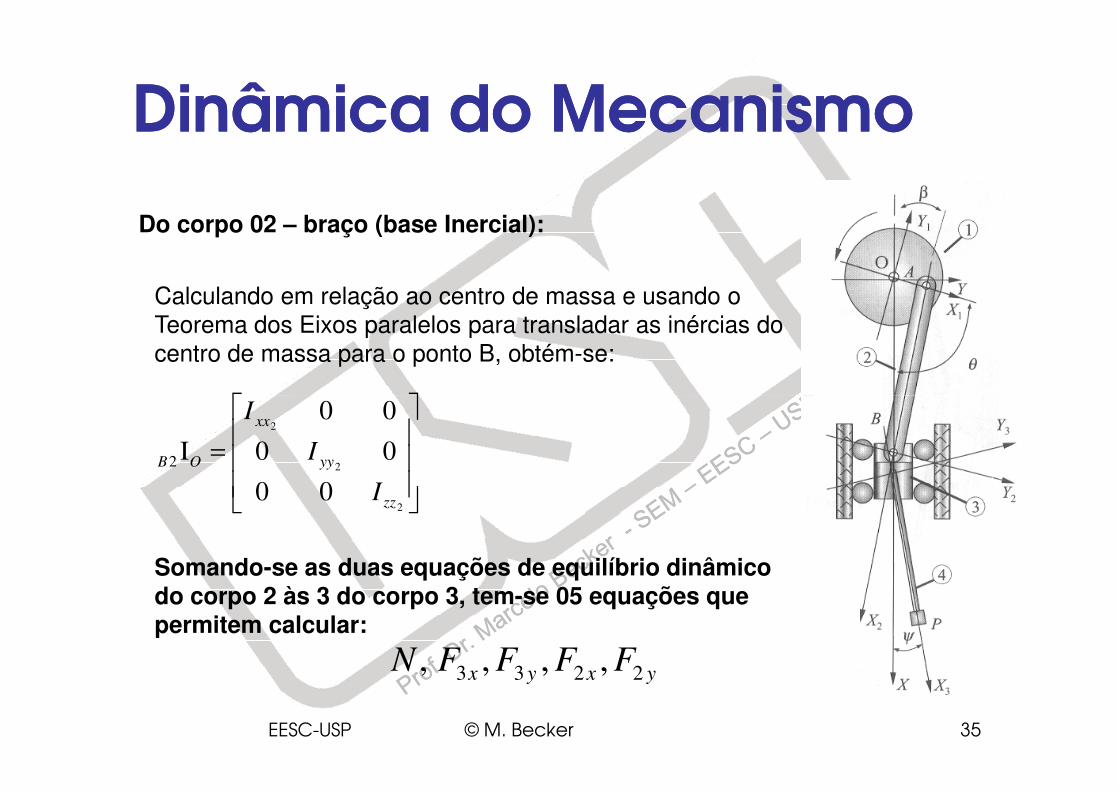
Do corpo 02 – braço (base Inercial):
Calculando em relação ao centro de massa e usando o Teorema dos Eixos paralelos para transladar as inércias do centro de massa para o ponto B, obtém-se:
00I
Dinâmica Dinâmica do Mecanismodo Mecanismo
35
=
2
2
2
00
00
00
I2
zz
yy
xx
OB
I
I
I
Somando-se as duas equações de equilíbrio dinâmico do corpo 2 às 3 do corpo 3, tem-se 05 equações que permitem calcular:
yxyx FFFFN 2233 ,,,,
EESC-USP © M. Becker
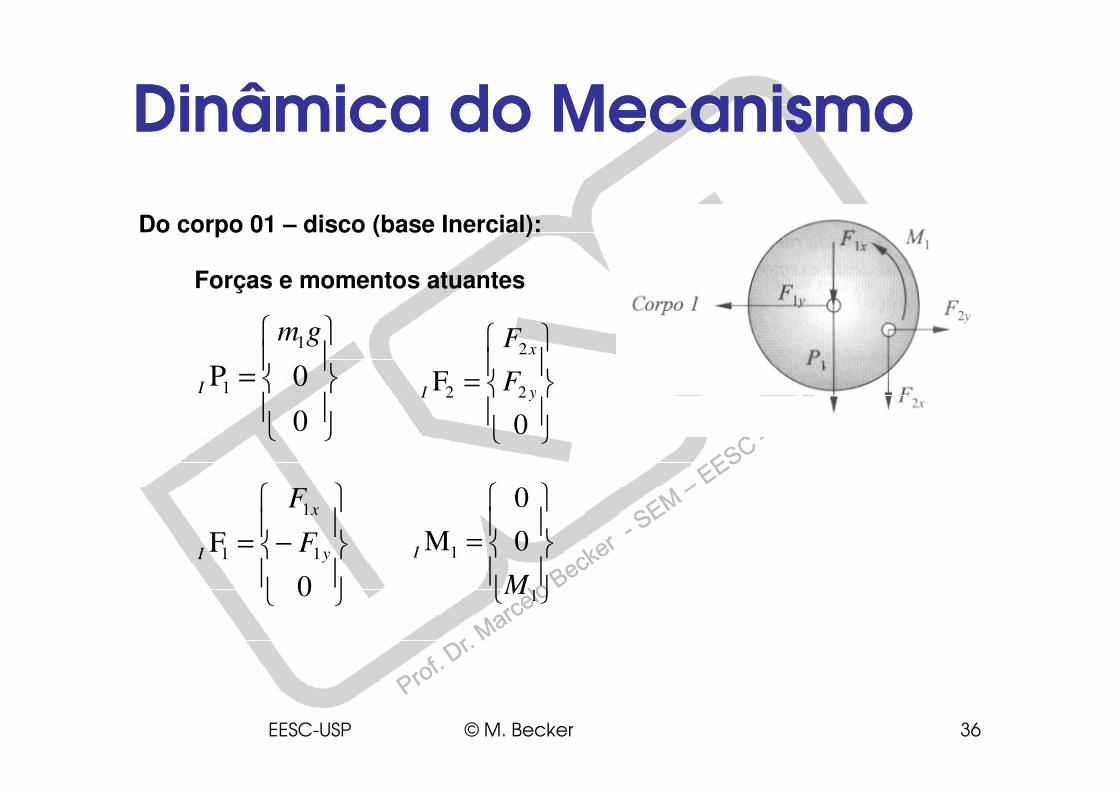
Do corpo 01 – disco (base Inercial):
Forças e momentos atuantes
= 0P
1
1
gm
I
=F 2
2
2 y
x
I F
F
Dinâmica Dinâmica do Mecanismodo Mecanismo
36
0
1I
=
0
F 22 yI F
−=
0
F 1
1
1 y
x
I F
F
=
1
10
0
M
M
I
EESC-USP © M. Becker
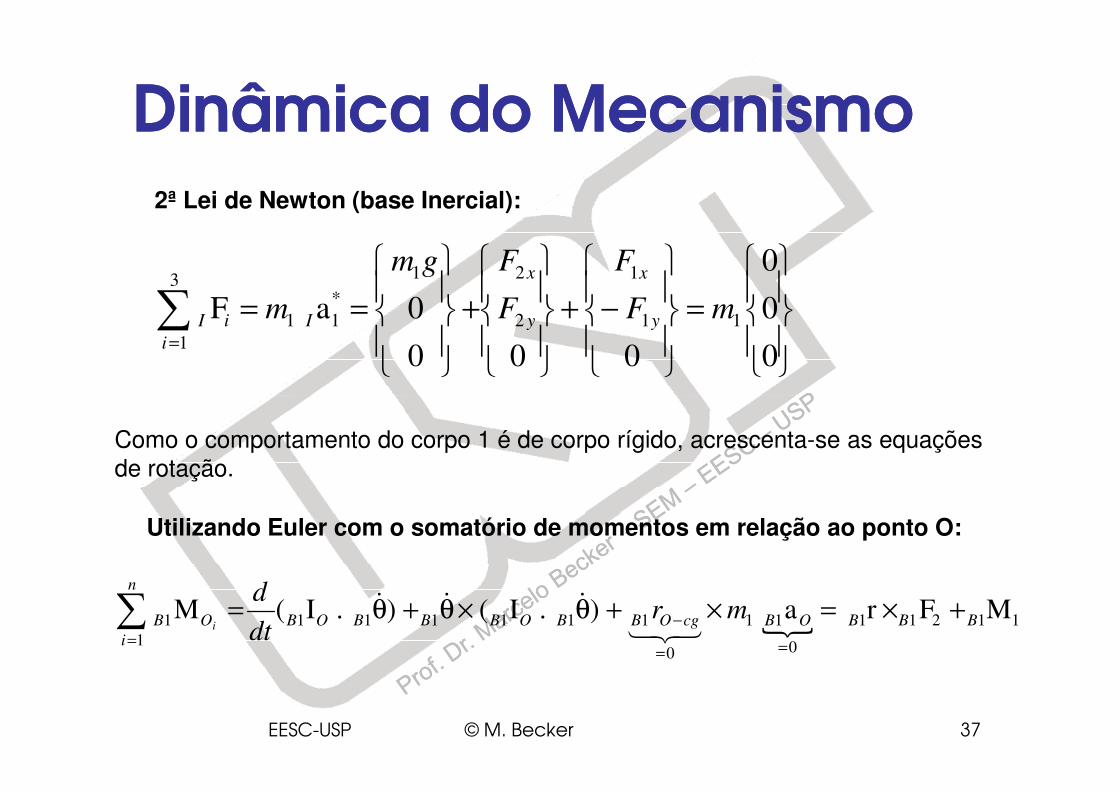
2ª Lei de Newton (base Inercial):
=
−+
+
==∑=
0
0
0
000
0aF 11
1
2
23
1
1
*
11 mF
F
F
Fgm
m y
x
y
x
i
IiI
Dinâmica Dinâmica do Mecanismodo Mecanismo
37
Como o comportamento do corpo 1 é de corpo rígido, acrescenta-se as equações de rotação.
11211
0
11
0
111111
1
1 MFra).I().I(M BBBOBcgOBBOBBBOB
n
i
OB mrdt
di
+×=×+θ×θ+θ===
−=
∑321
&&&
Utilizando Euler com o somatório de momentos em relação ao ponto O:
EESC-USP © M. Becker
•• IntroduçãoIntrodução
•• Sist. Sist. MultiMulti--corposcorpos no Planono Plano
•• Sist. Sist. MultiMulti--corposcorpos no Espaçono Espaço
Sumário da AulaSumário da Aula
•• Sist. Sist. MultiMulti--corposcorpos no Espaçono Espaço
• Princípio de Jourdain
• Aplicações
EESC-USP © M. Becker 38/67

Sist. Sist. MultiMulti--corposcorpos no Espaçono Espaço
• GIROSCÓPIOAplicação dos Ângulos de Euler na modelagem do movimento:
– Equações de
39
– Equações de Movimento
– Reações Dinâmicas
(O momento da força peso e
anulado devido aos momentos
de reação aplicados pelos
mancais sobre o rotor)
EESC-USP © M. Becker
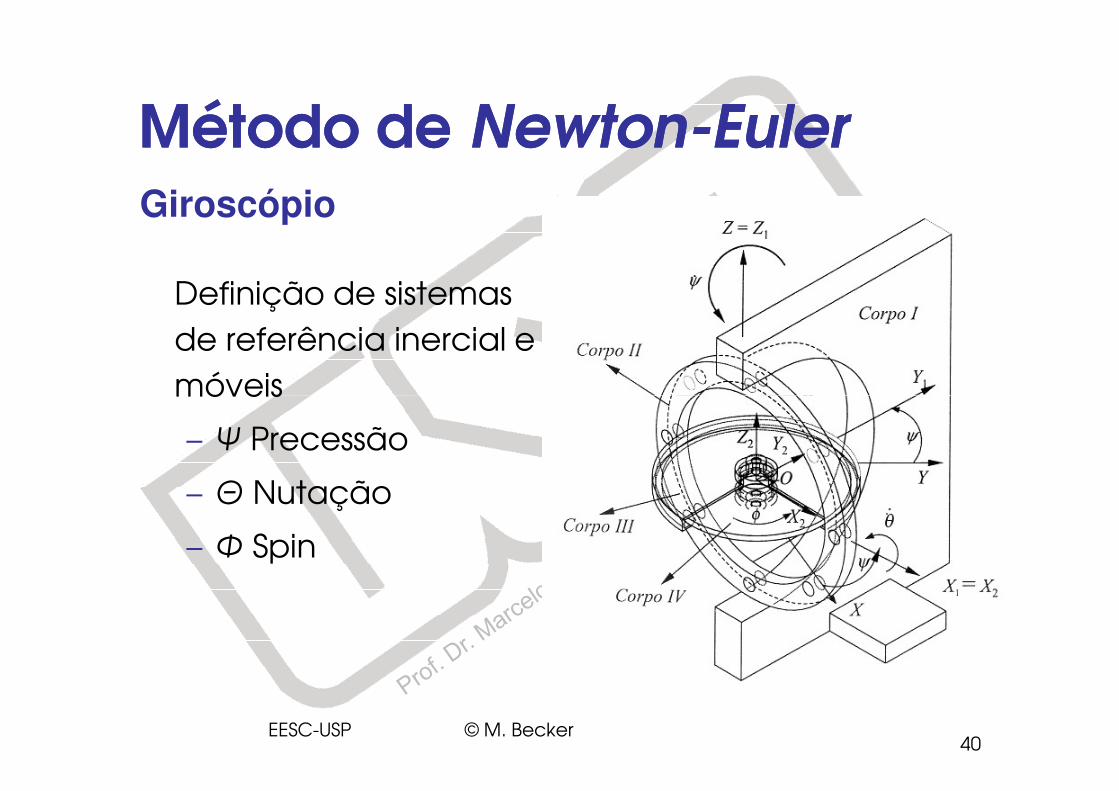
Método de Método de NewtonNewton--EulerEuler
Definição de sistemas de referência inercial e móveis
Giroscópio
40
móveis
– Ψ Precessão
– Θ Nutação
– Φ Spin
EESC-USP © M. Becker
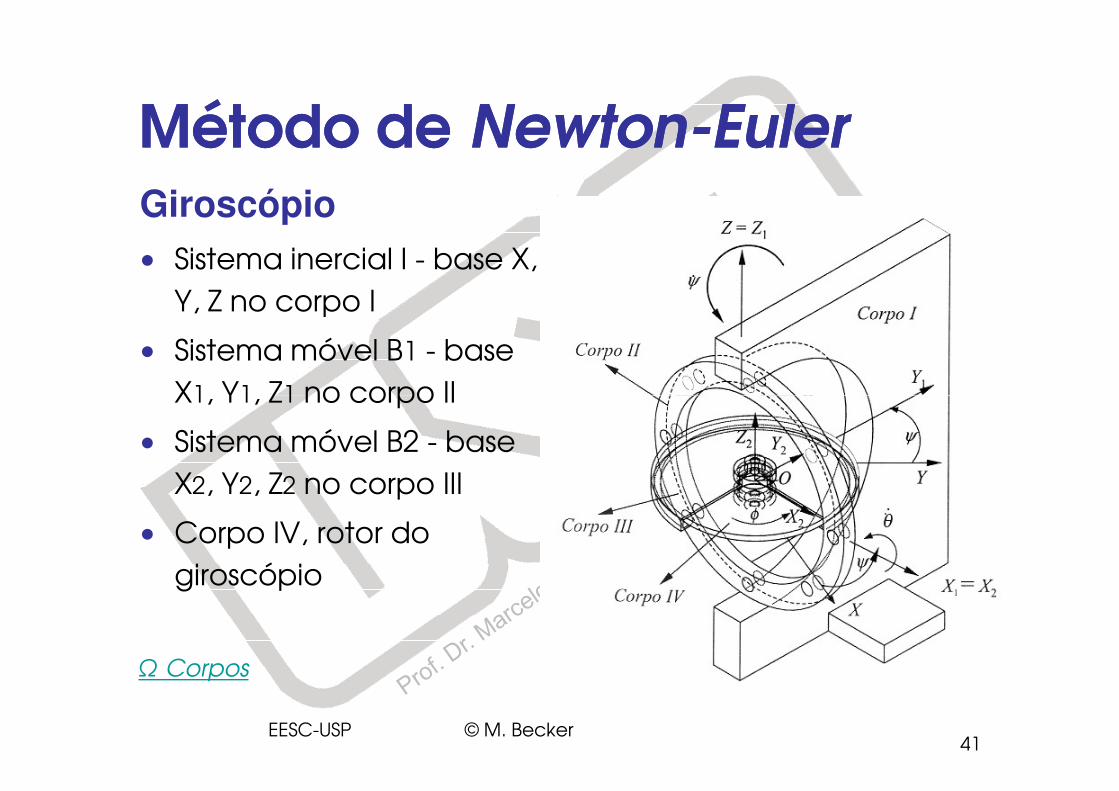
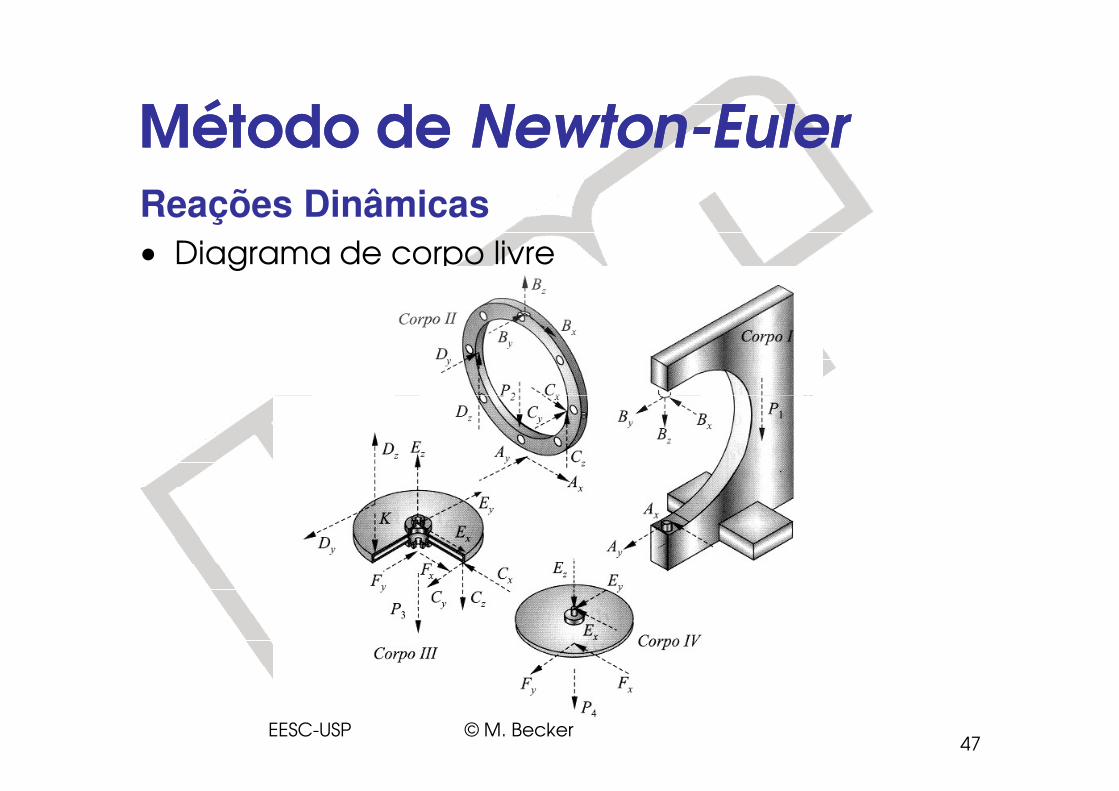
Método de Método de NewtonNewton--EulerEuler
• Sistema inercial I - base X, Y, Z no corpo I
• Sistema móvel B1 - base X1, Y1, Z1 no corpo II
Giroscópio
41
X1, Y1, Z1 no corpo II
• Sistema móvel B2 - base X2, Y2, Z2 no corpo III
• Corpo IV, rotor do giroscópio
Ω Corpos
EESC-USP © M. Becker
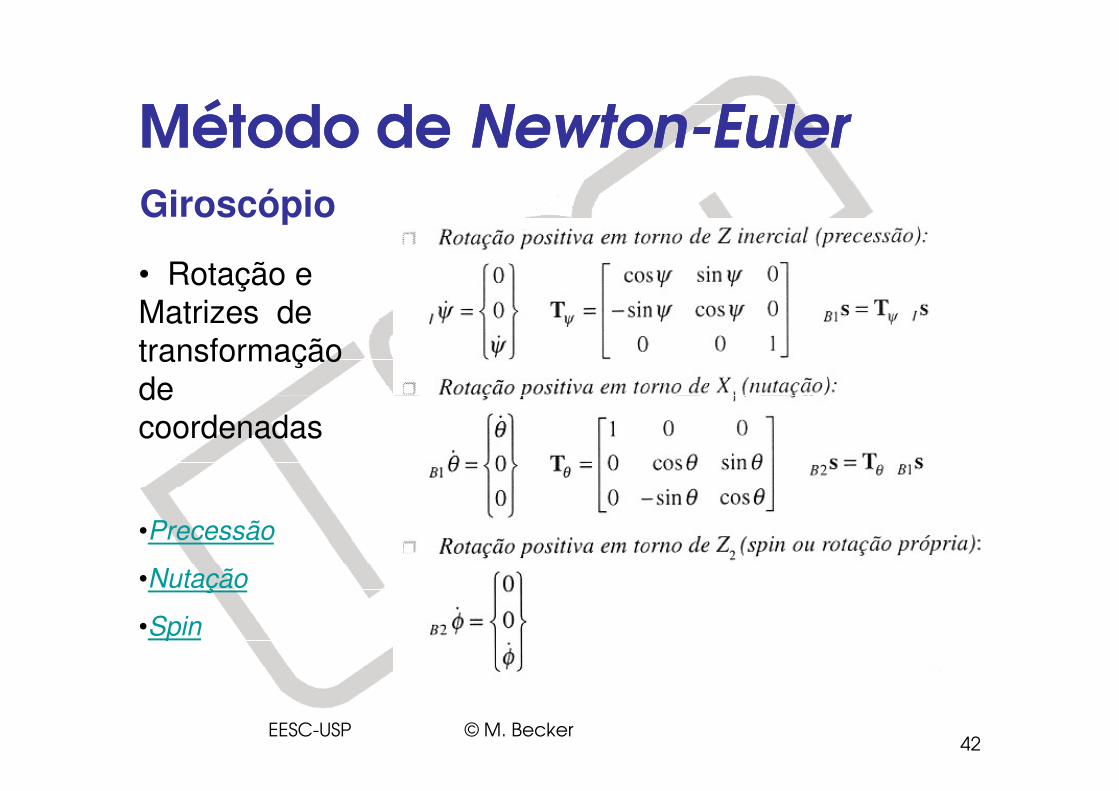
• Rotação e Matrizes de transformação de
Método de Método de NewtonNewton--EulerEulerGiroscópio
42
de coordenadas
•Precessão
•Nutação
•Spin
EESC-USP © M. Becker
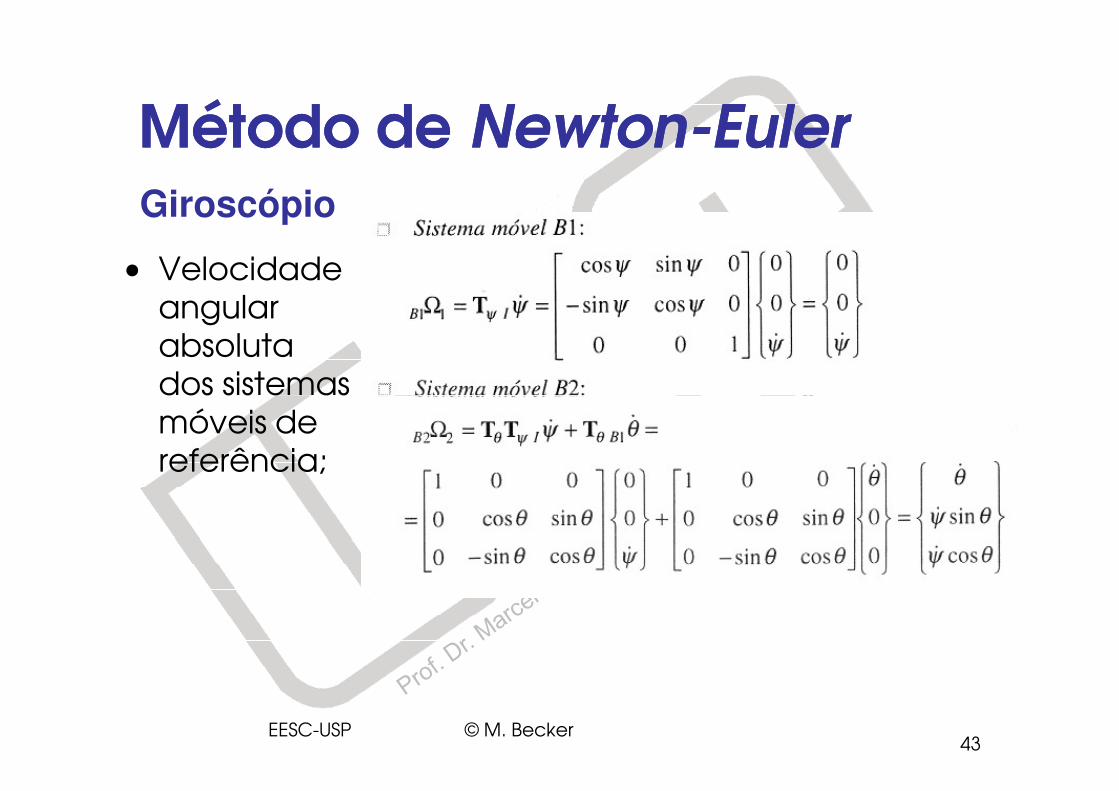
Método de Método de NewtonNewton--EulerEuler
• Velocidade angular absoluta dos sistemas
Giroscópio
43
dos sistemas móveis de referência;
EESC-USP © M. Becker
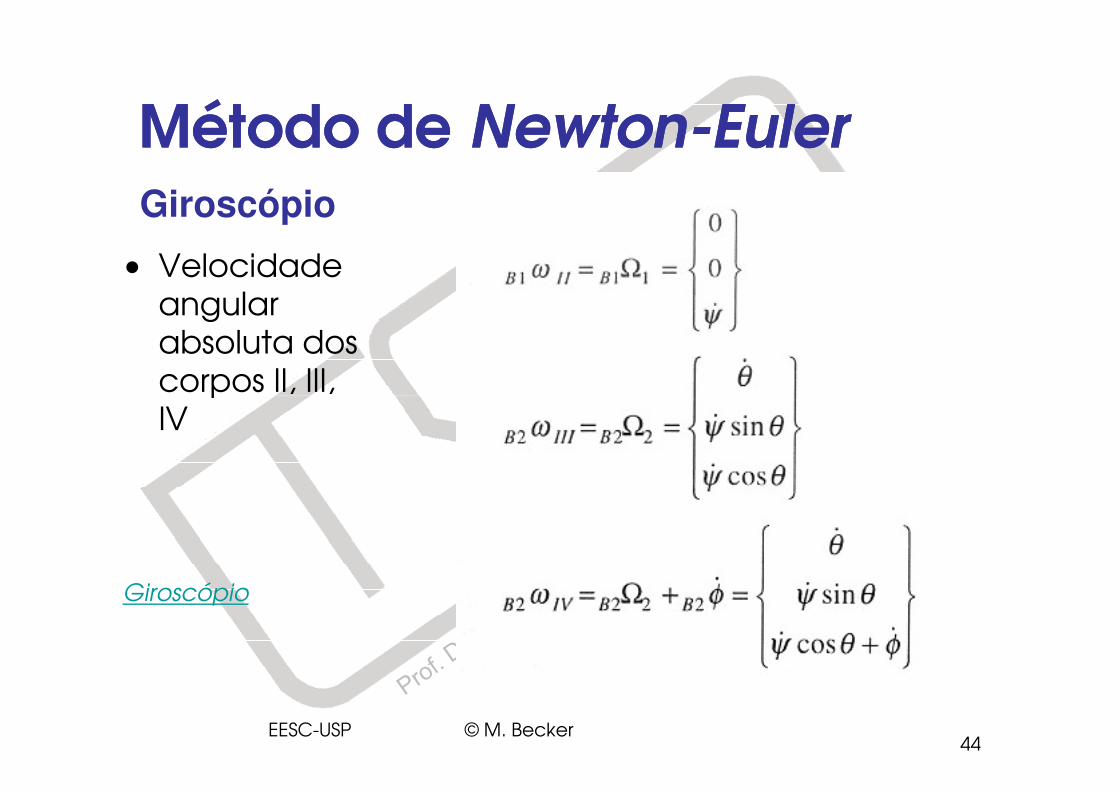
Método de Método de NewtonNewton--EulerEuler
• Velocidade angular absoluta dos corpos II, III,
Giroscópio
44
corpos II, III, IV
Giroscópio
EESC-USP © M. Becker
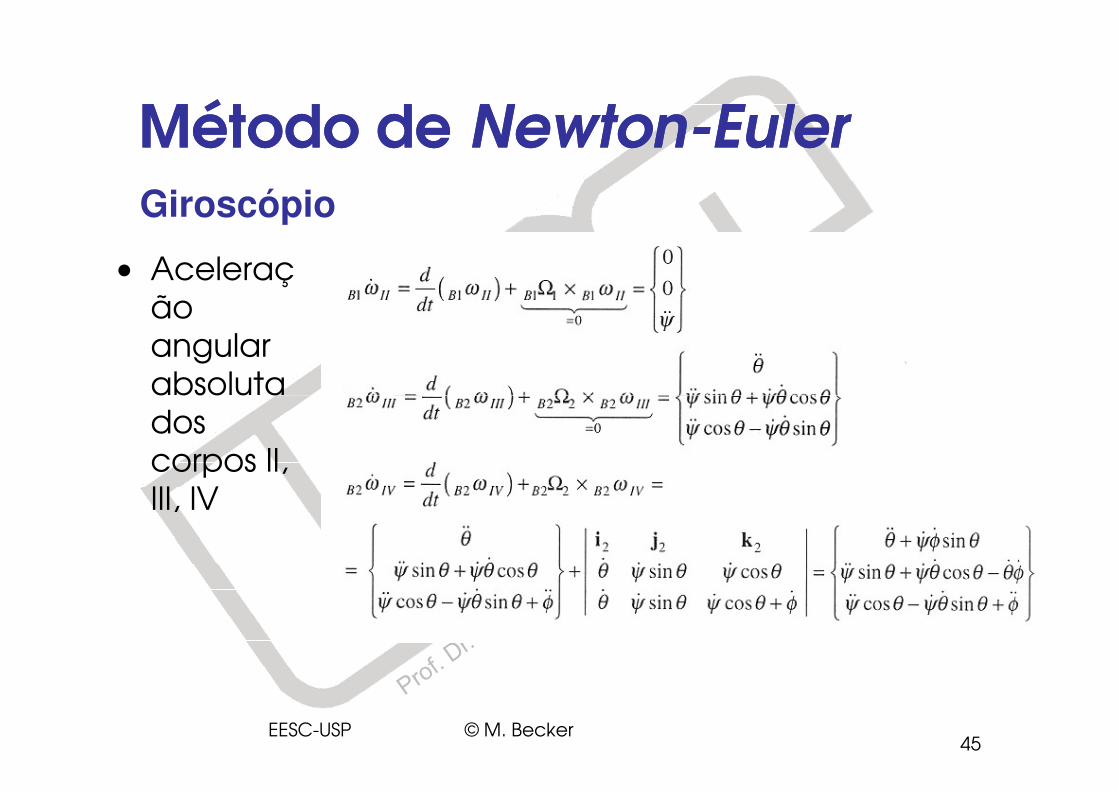
Método de Método de NewtonNewton--EulerEuler
• Aceleração angular absoluta
Giroscópio
45
absoluta dos corpos II, III, IV
EESC-USP © M. Becker
Método de Método de NewtonNewton--EulerEuler
• Velocidade linear absoluta do centro de massa dos corpos II, III, IV
Giroscópio
46
• Aceleração linear absoluta do centro de massa dos corpos II, III, IV
EESC-USP © M. Becker
Método de Método de NewtonNewton--EulerEuler
• Diagrama de corpo livreReações Dinâmicas
47EESC-USP © M. Becker
Método de Método de NewtonNewton--EulerEuler
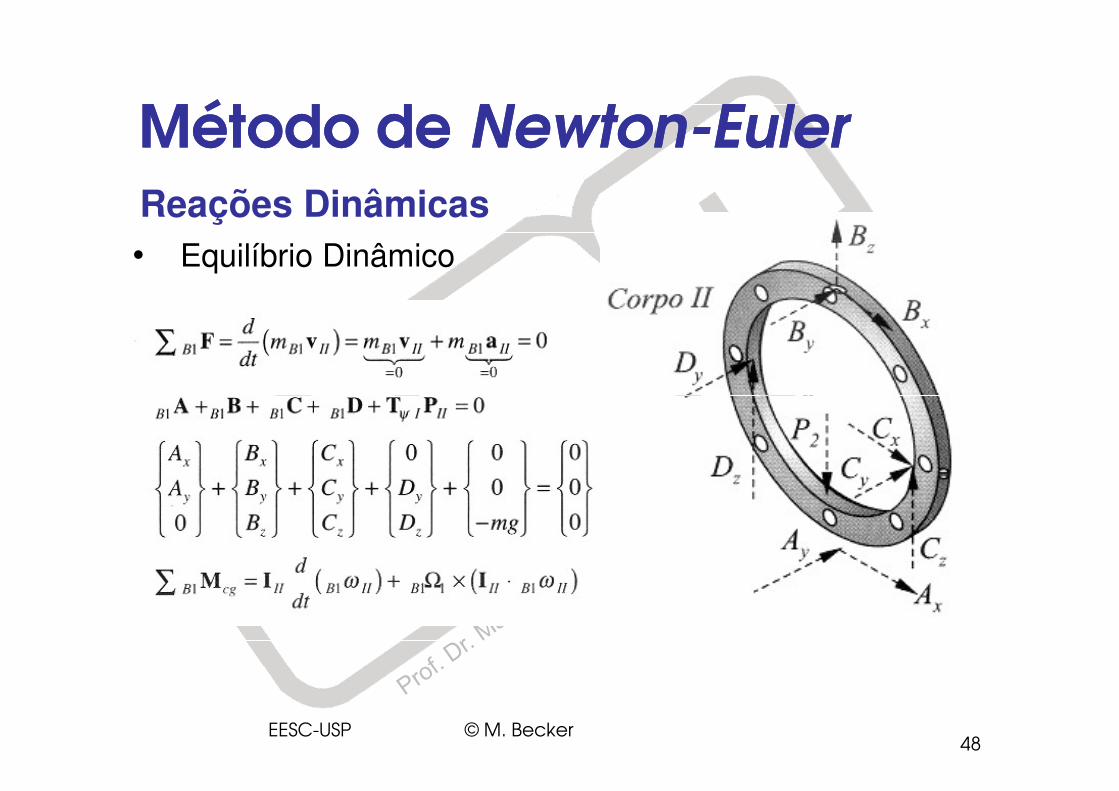
• Equilíbrio Dinâmico
Reações Dinâmicas
48EESC-USP © M. Becker
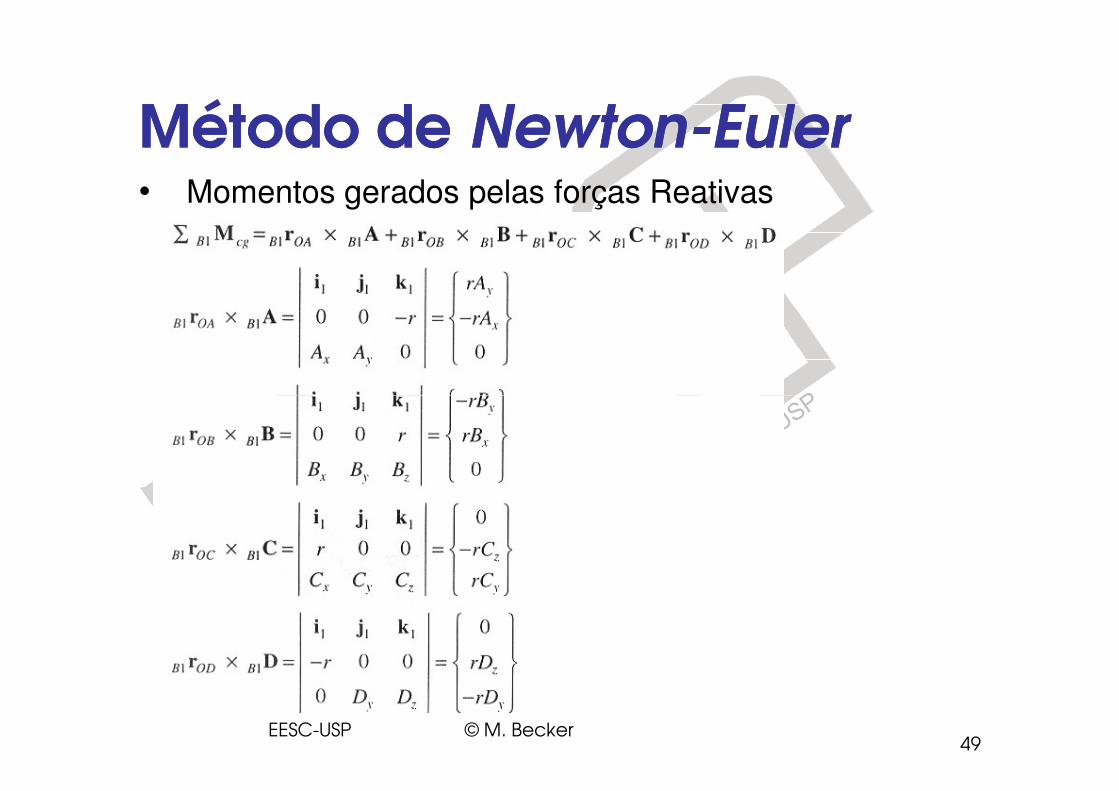
Método de Método de NewtonNewton--EulerEuler• Momentos gerados pelas forças Reativas
49EESC-USP © M. Becker
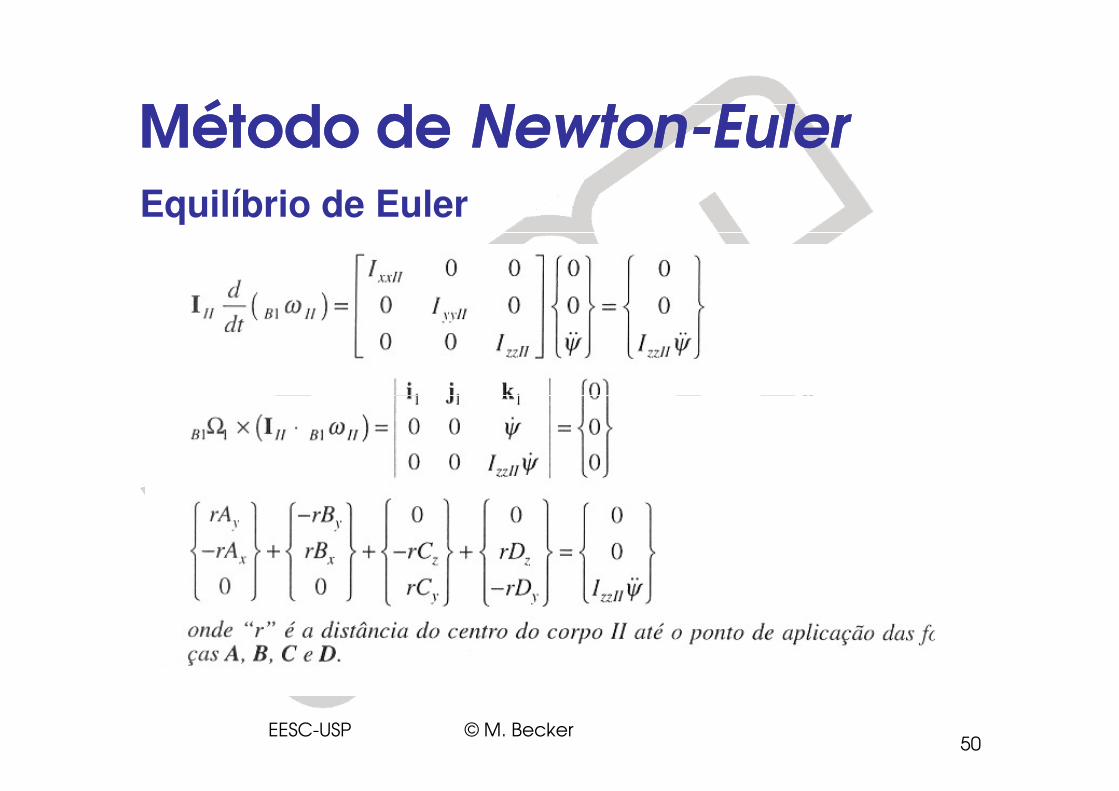
Método de Método de NewtonNewton--EulerEulerEquilíbrio de Euler
50EESC-USP © M. Becker
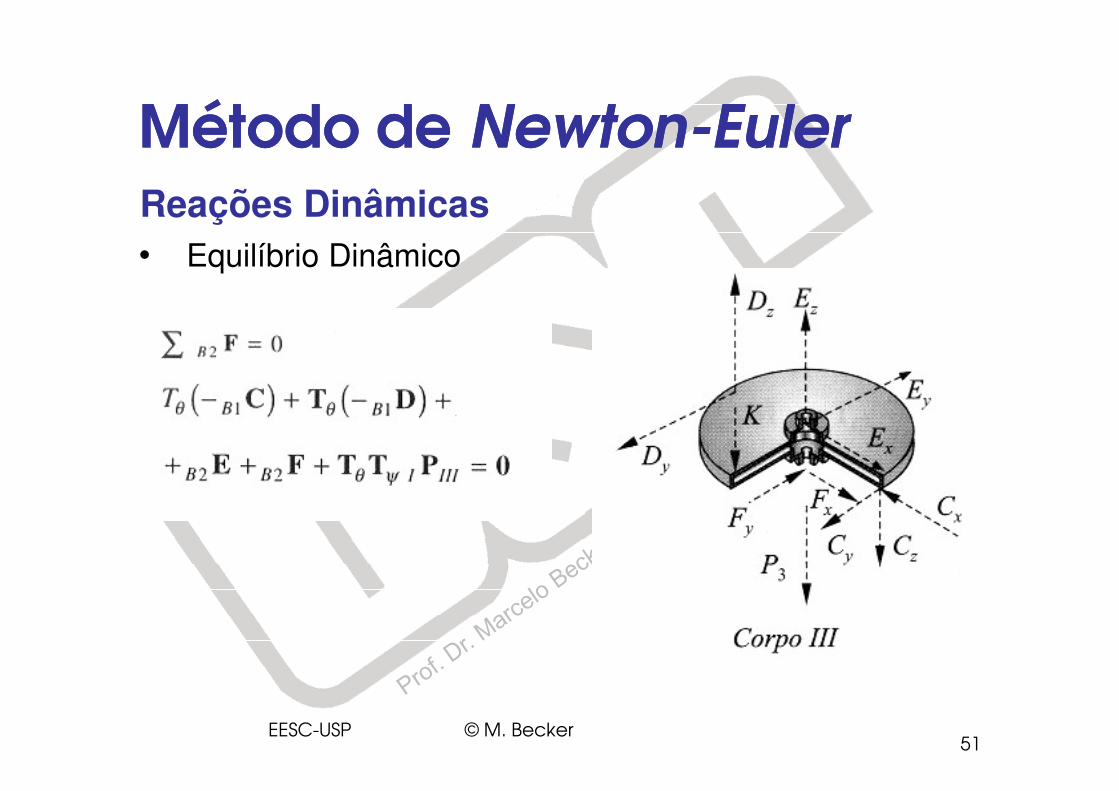
Método de Método de NewtonNewton--EulerEulerReações Dinâmicas• Equilíbrio Dinâmico
51EESC-USP © M. Becker
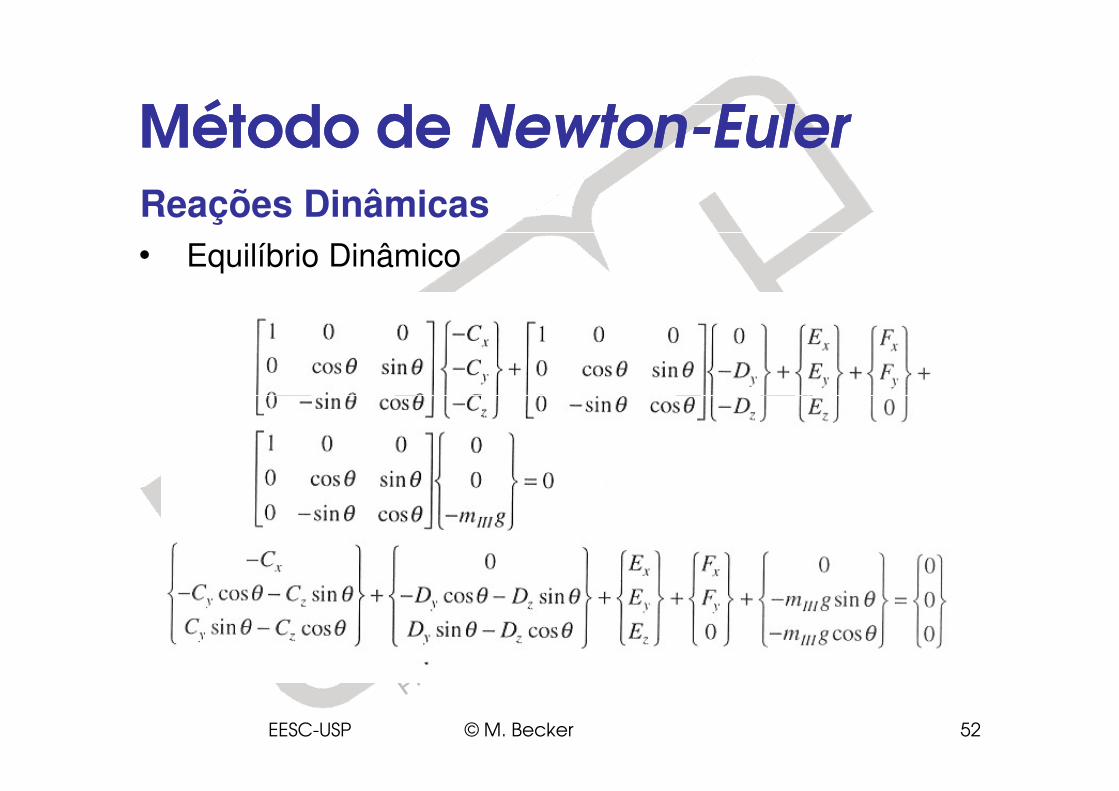
Método de Método de NewtonNewton--EulerEulerReações Dinâmicas• Equilíbrio Dinâmico
52EESC-USP © M. Becker
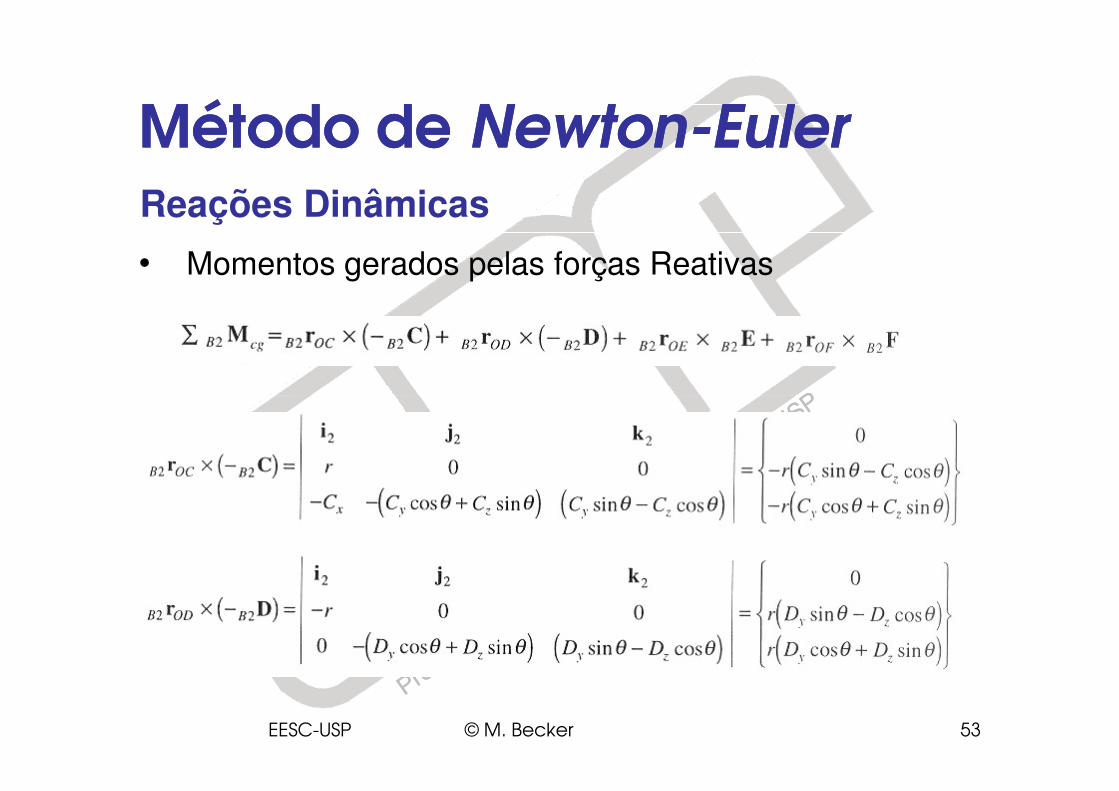
Método de Método de NewtonNewton--EulerEuler
• Momentos gerados pelas forças Reativas
Reações Dinâmicas
53EESC-USP © M. Becker
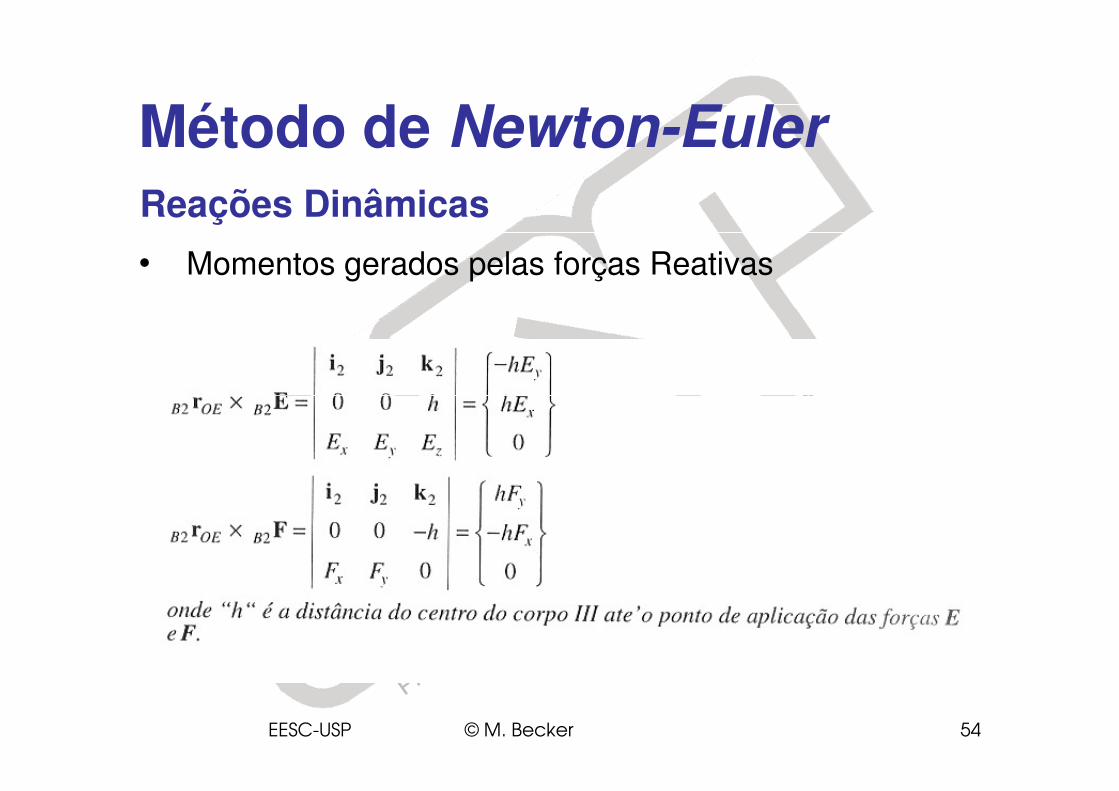
Método de Newton-Euler
• Momentos gerados pelas forças Reativas
Reações Dinâmicas
54EESC-USP © M. Becker
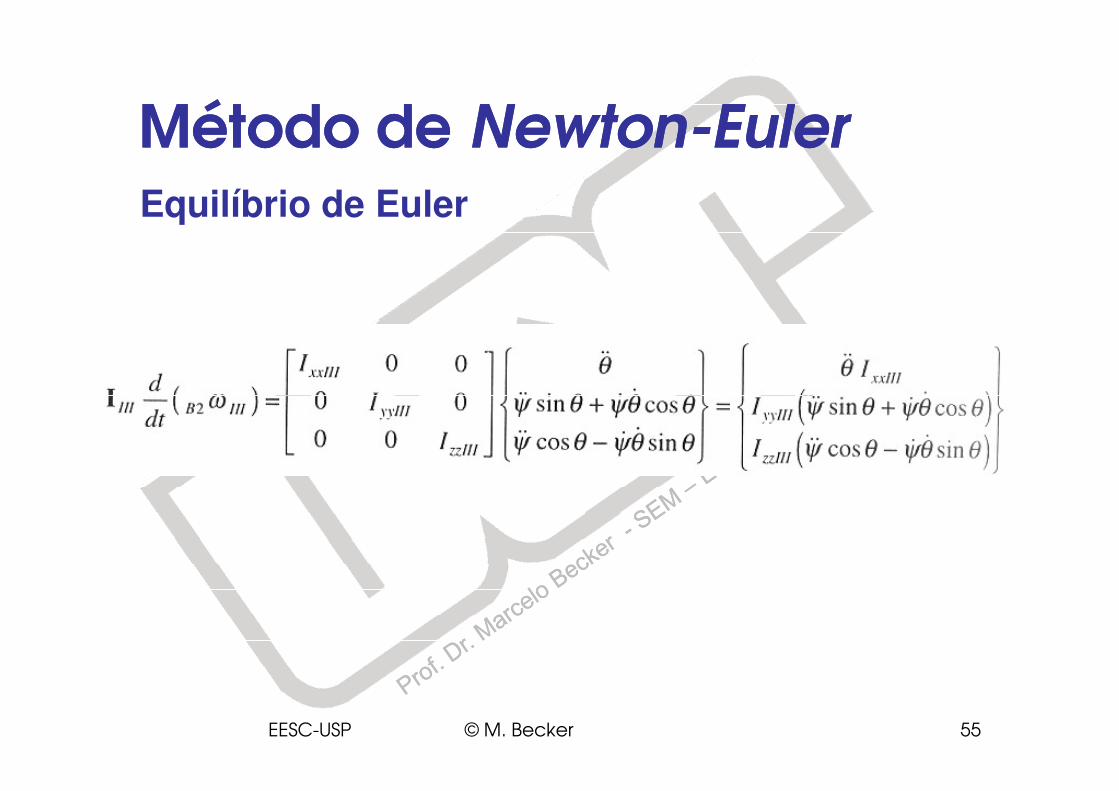
Método de Método de NewtonNewton--EulerEulerEquilíbrio de Euler
55EESC-USP © M. Becker
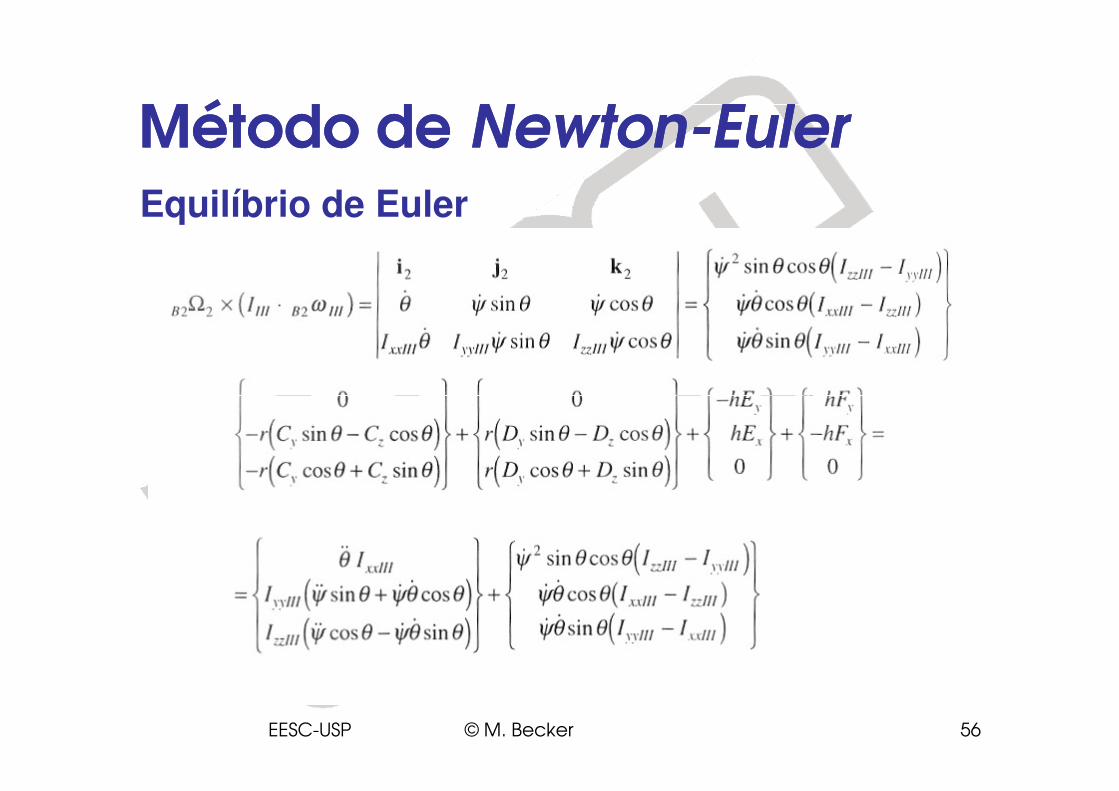
Método de Método de NewtonNewton--EulerEulerEquilíbrio de Euler
56EESC-USP © M. Becker
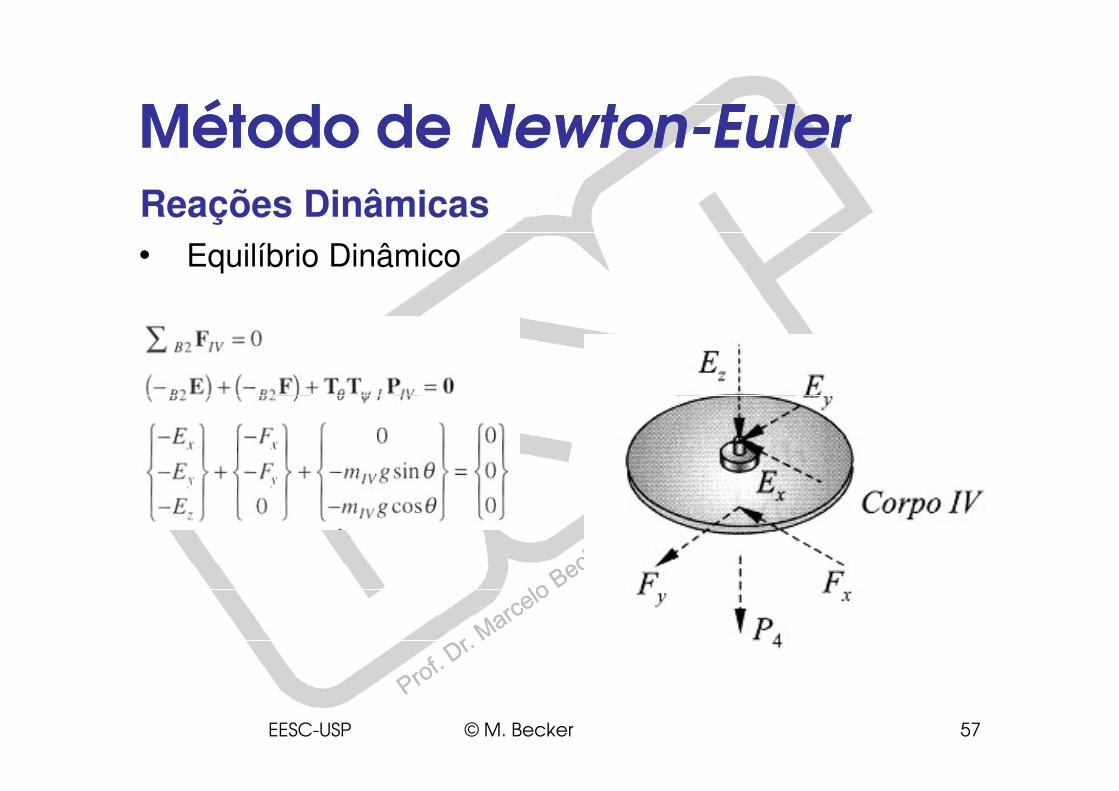
Método de Método de NewtonNewton--EulerEulerReações Dinâmicas• Equilíbrio Dinâmico
57EESC-USP © M. Becker
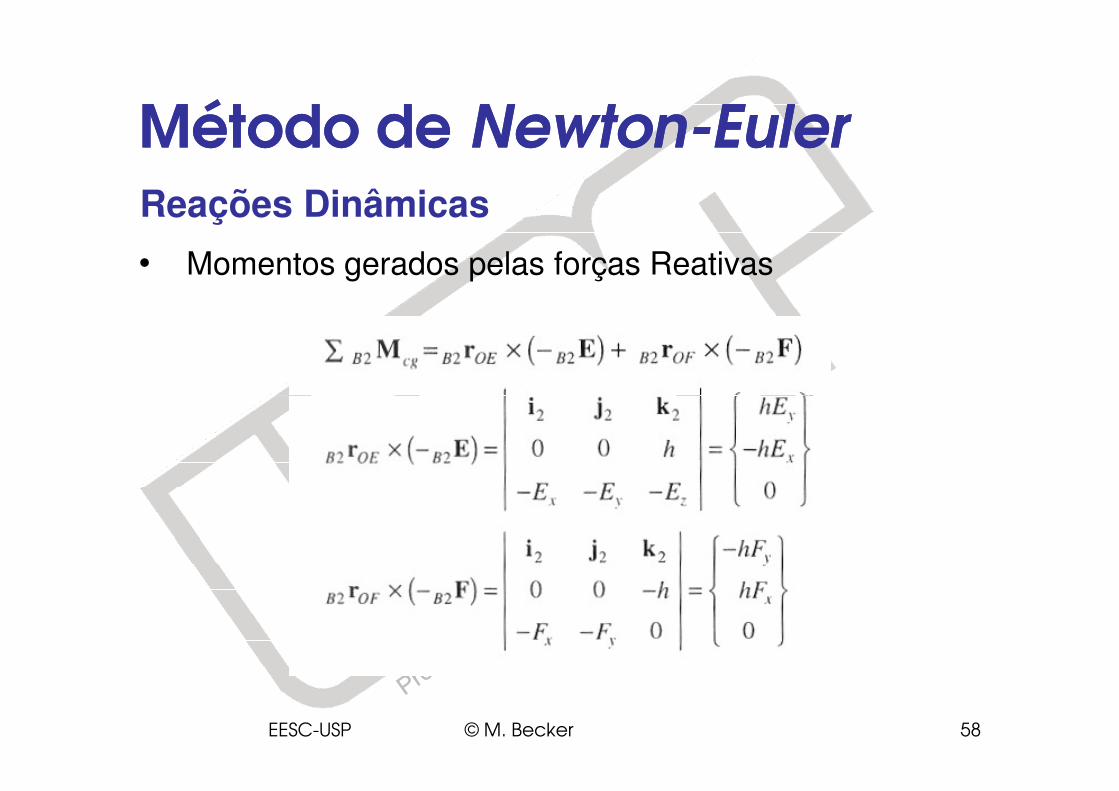
Método de Método de NewtonNewton--EulerEulerReações Dinâmicas
• Momentos gerados pelas forças Reativas
58EESC-USP © M. Becker
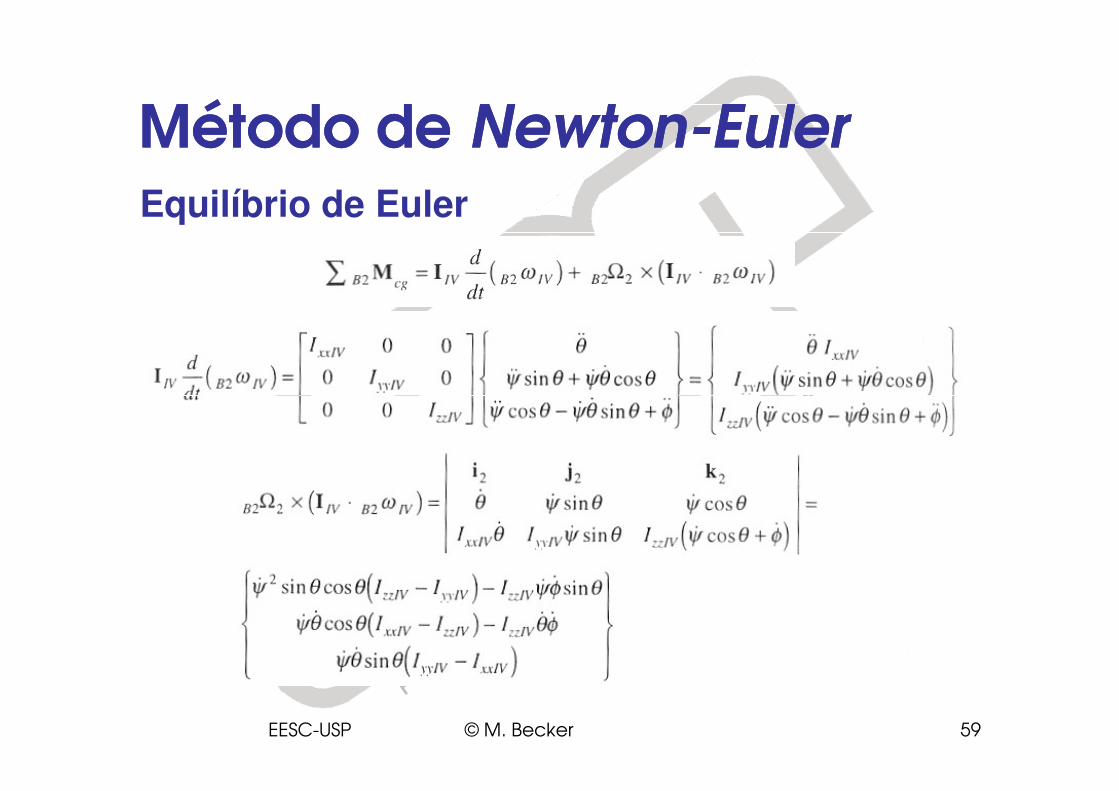
Método de Método de NewtonNewton--EulerEulerEquilíbrio de Euler
59EESC-USP © M. Becker
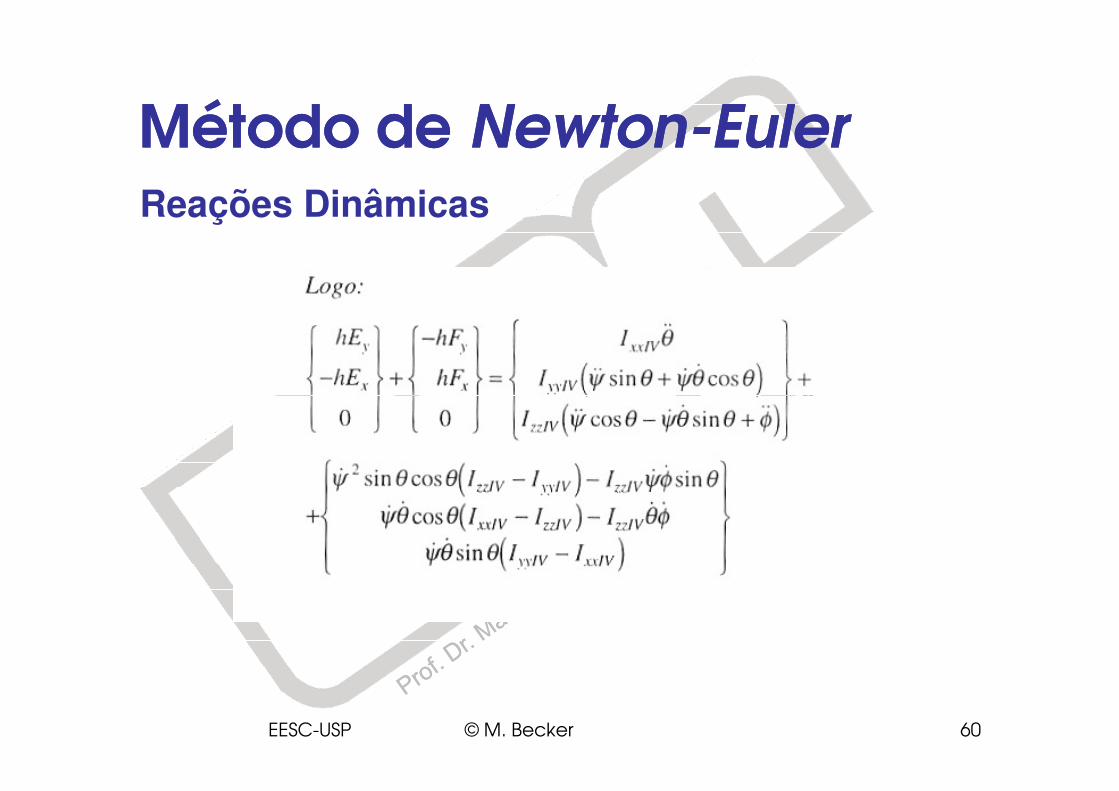
Método de Método de NewtonNewton--EulerEulerReações Dinâmicas
60EESC-USP © M. Becker
• Agrupando todas as equações, chega-se a um sistema de 18 equações. Têm-se 15 incógnitas, que são as forças dinâmicas de reação nos pontos A, B, C, D e E;
Resolvendo o sistema de equações
Método de Método de NewtonNewton--EulerEuler
61
pontos A, B, C, D e E;
• As três equações restantes são as equações diferenciais para os ângulos de precessão, nutação e spin;
EESC-USP © M. Becker
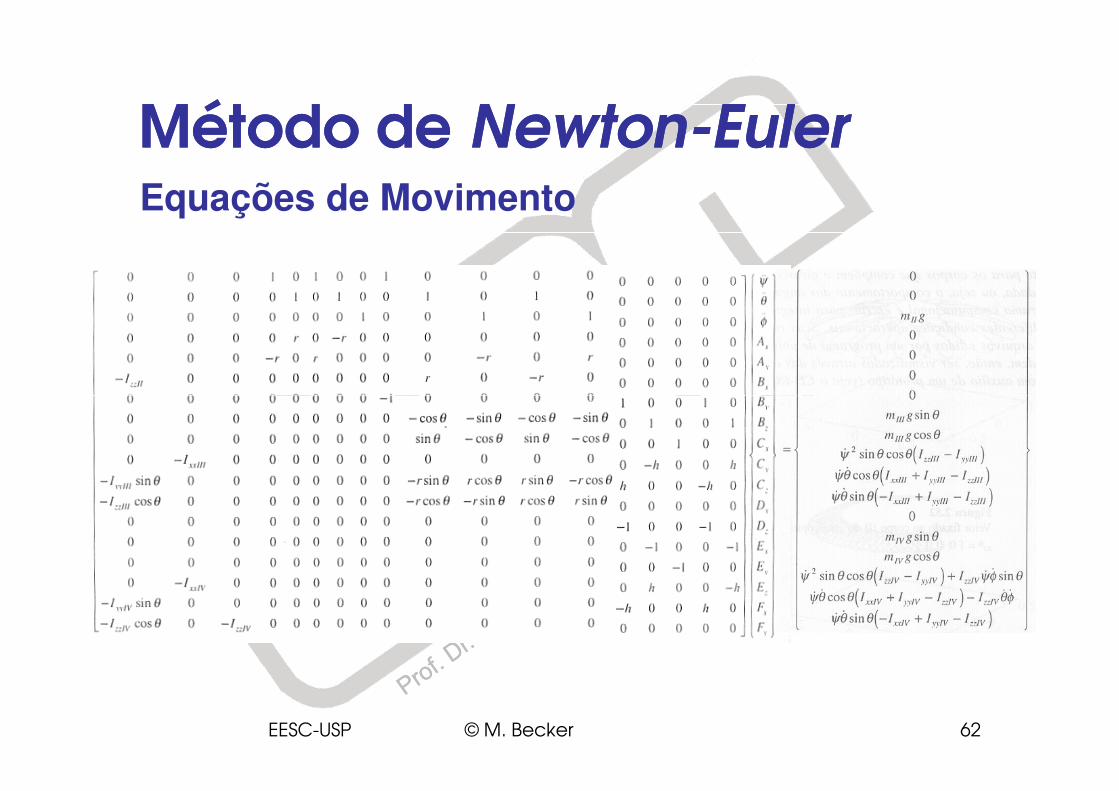
Equações de Movimento
Método de Método de NewtonNewton--EulerEuler
62EESC-USP © M. Becker
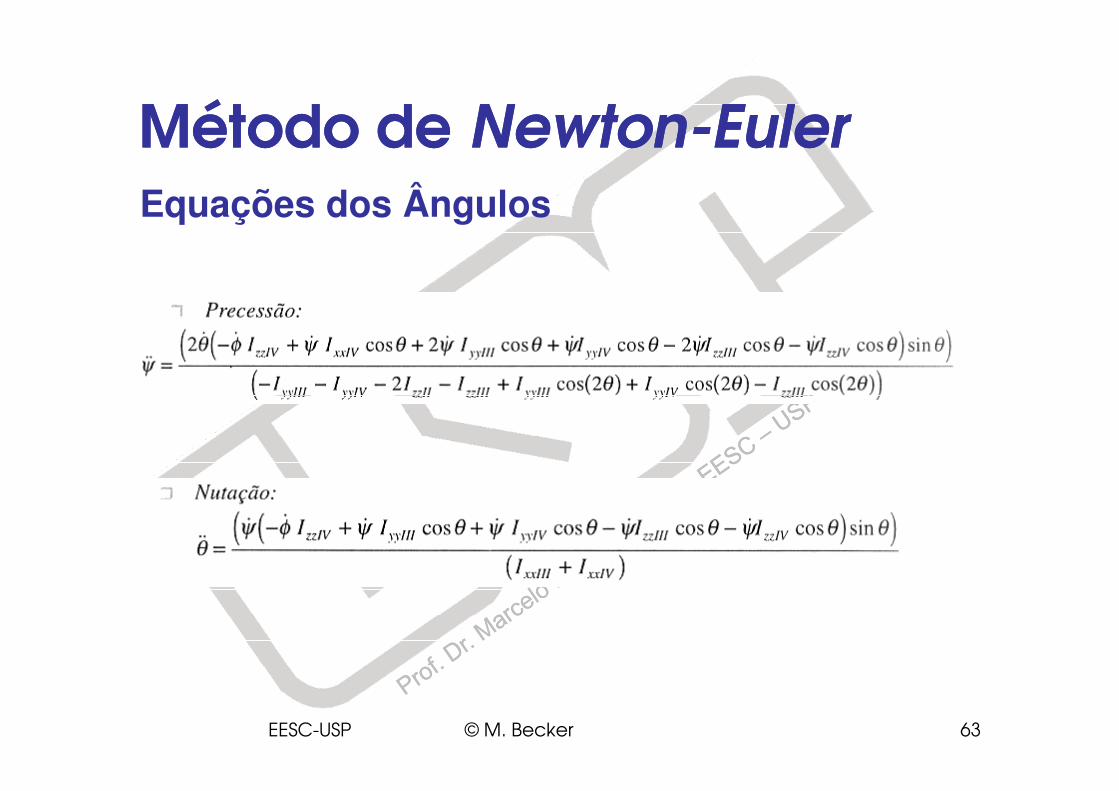
Método de Método de NewtonNewton--EulerEulerEquações dos Ângulos
63EESC-USP © M. Becker
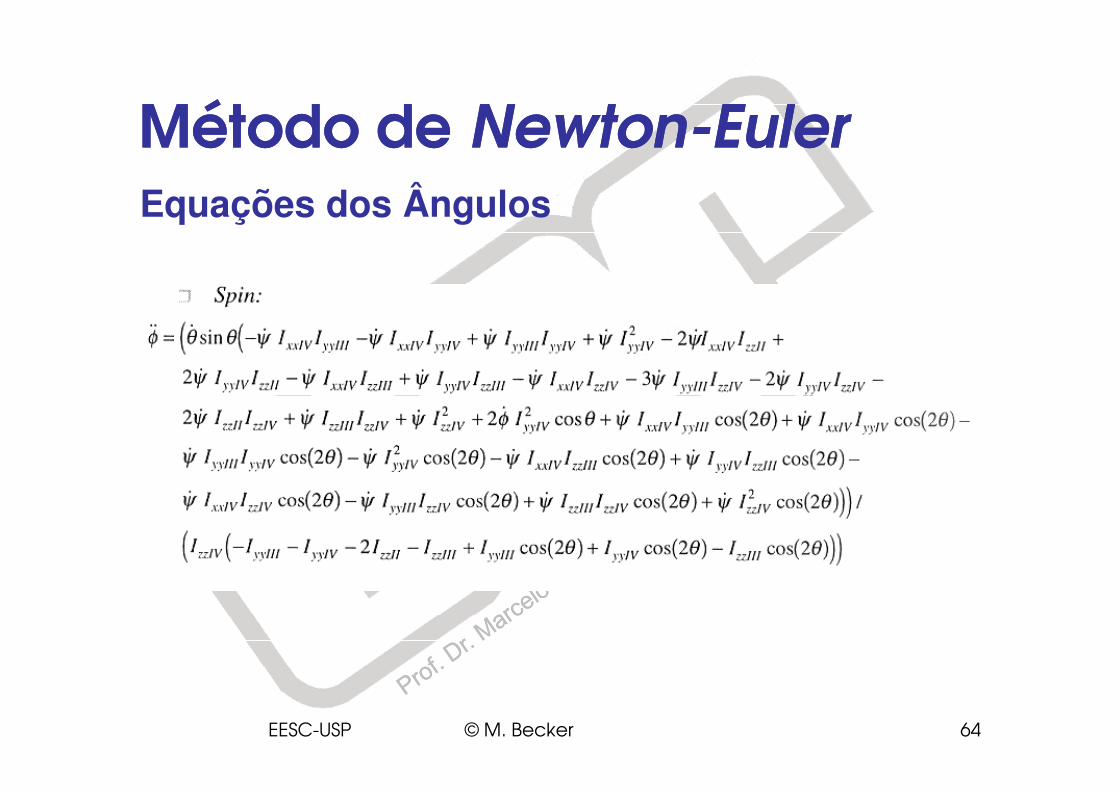
Método de Método de NewtonNewton--EulerEulerEquações dos Ângulos
64EESC-USP © M. Becker
Simulações
Método de Método de NewtonNewton--EulerEuler
• Experimental 1 Spin 1
• Experimental 1 Spin 2
65
• Simulação 1
• Experimental 2 Spin 1
• Experimental 2 Spin 2
• Simulação 2
EESC-USP © M. Becker
•• IntroduçãoIntrodução
•• Sist. Sist. MultiMulti--corposcorpos no Planono Plano
•• Sist. Sist. MultiMulti--corposcorpos no Espaçono Espaço
Sumário da AulaSumário da Aula
•• Sist. Sist. MultiMulti--corposcorpos no Espaçono Espaço
•• Princípio de Princípio de JourdainJourdain
• Aplicações
EESC-USP © M. Becker 66/67
Princípio de JourdainPrincípio de Jourdain
• Princípio do trabalho Virtual – D`Alembert
Equações de Movimento sem o Cálculo dasReações Dinâmicas
67
– As forças e momentos aplicados sobre um corpo rígido podem ser divididos em :
•Passivos
•Ativos
EESC-USP © M. Becker
• PassivasSão aquelas que não realizam trabalho, como é o caso das forças e momentos de reação R e M ;
Princípio de JourdainPrincípio de JourdainForças e Momentos
68
é o caso das forças e momentos de reação R e MR;
• AtivasSão aquelas que realizam trabalho FE e ME;
EESC-USP © M. Becker
• Num plano onde um corpo é obrigado a realizar determinada trajetória, a reação normal do plano sobre o corpo estará sempre perpendicular à sua trajetória. Por
Princípio de JourdainPrincípio de JourdainForças e Momentos
69
sempre perpendicular à sua trajetória. Por isso a força normal não realiza trabalho e é chamada e força “perdida” ou “passiva”;
EESC-USP © M. Becker
• Reescrevendo a equação de Newton-Euler
Princípio de JourdainPrincípio de JourdainForças e Momentos
70EESC-USP © M. Becker
Princípio de JourdainPrincípio de JourdainForças e Momentos
• De outra forma temos
71EESC-USP © M. Becker
Princípio de JourdainPrincípio de JourdainForças e Momentos
• Multiplicando agora pelos vetores de deslocamento virtual que estão na direção do movimento, e conseqüentemente são perpendiculares às forças e momentos de
ξBes ∆∆Ι
72
perpendiculares às forças e momentos de reação;
EESC-USP © M. Becker
Princípio de JourdainPrincípio de JourdainForças e Momentos
• Somando-se o trabalho “ virtual ” realizado pelas forças e momentos de reação temos:
73EESC-USP © M. Becker
Princípio de JourdainPrincípio de JourdainForças e Momentos
• Fazendo o uso agora dos vetores de velocidade virtual, tem-se o princípio da potência formulado por Jourdain;
ξ&&Bes ∆∆Ι
74EESC-USP © M. Becker
Princípio de JourdainPrincípio de JourdainForças e Momentos
• Sabe-se que os vetores devem respeitar as condições de vínculo, ou seja, estes vetores só variam nas direções em que se têm graus de liberdade;
ξ&&Bes ∆∆Ι
75
se têm graus de liberdade;
EESC-USP © M. Becker
Princípio de JourdainPrincípio de JourdainForças e Momentos
• Defini-se então o vetor q , composto pelas coordenadas dos graus de liberdade do sistema mecânico;
• Mas os movimentos de um corpo rígido livre
76
• Mas os movimentos de um corpo rígido livre (sem vínculos) no espaço são descritos por 6 coordenas: 3 de translação de 3 de rotação;
EESC-USP © M. Becker
Princípio de JourdainPrincípio de JourdainForças e Momentos
• Logo:
Tqqqqqqq 654321=
77
Tqqqqqqq
ou
qqqqqqq
654321
654321
&&&&&&& =
=
EESC-USP © M. Becker
Princípio de JourdainPrincípio de JourdainForças e Momentos
• Sabe-se que esses vetores de velocidade só variam nas direções dos graus de liberdade do corpo. Logo, os mesmos podes ser obtidos quando as derivadas dos mesmos em relação
78
quando as derivadas dos mesmos em relação aos graus de liberdade do sistema são calculadas. Essa ferramenta é denominada de Jacobiano;
EESC-USP © M. Becker
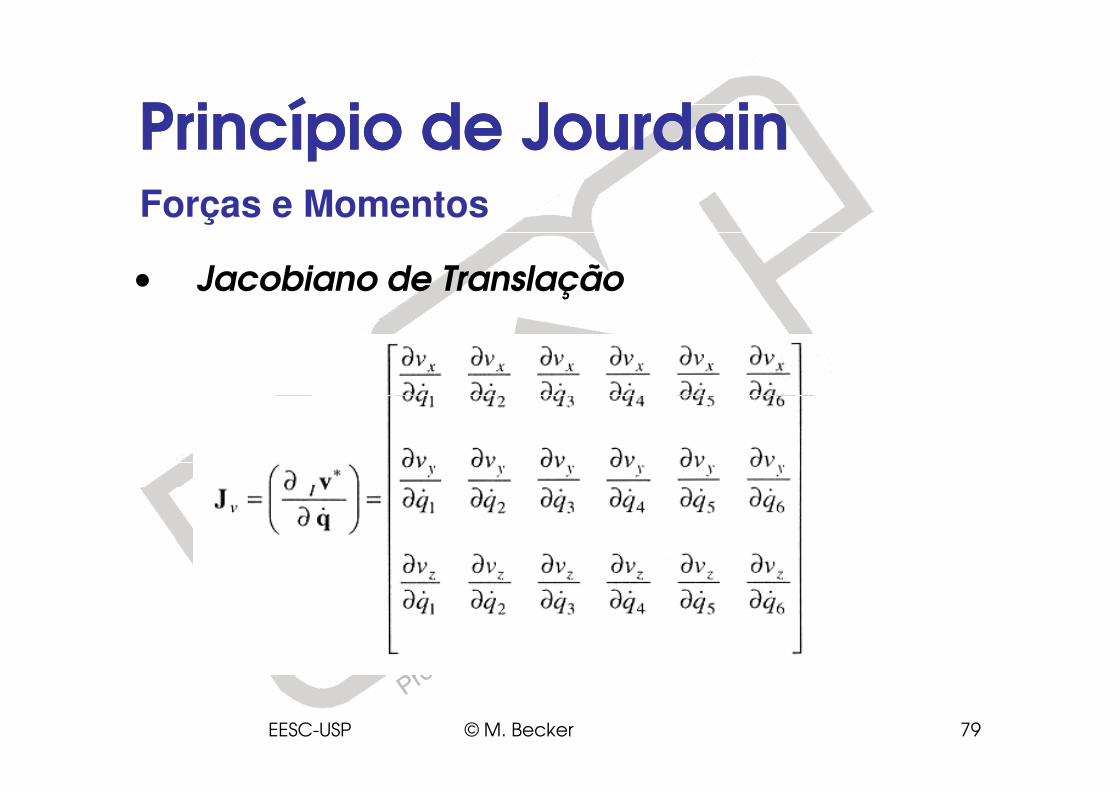
Princípio de JourdainPrincípio de JourdainForças e Momentos
• Jacobiano de Translação
79EESC-USP © M. Becker
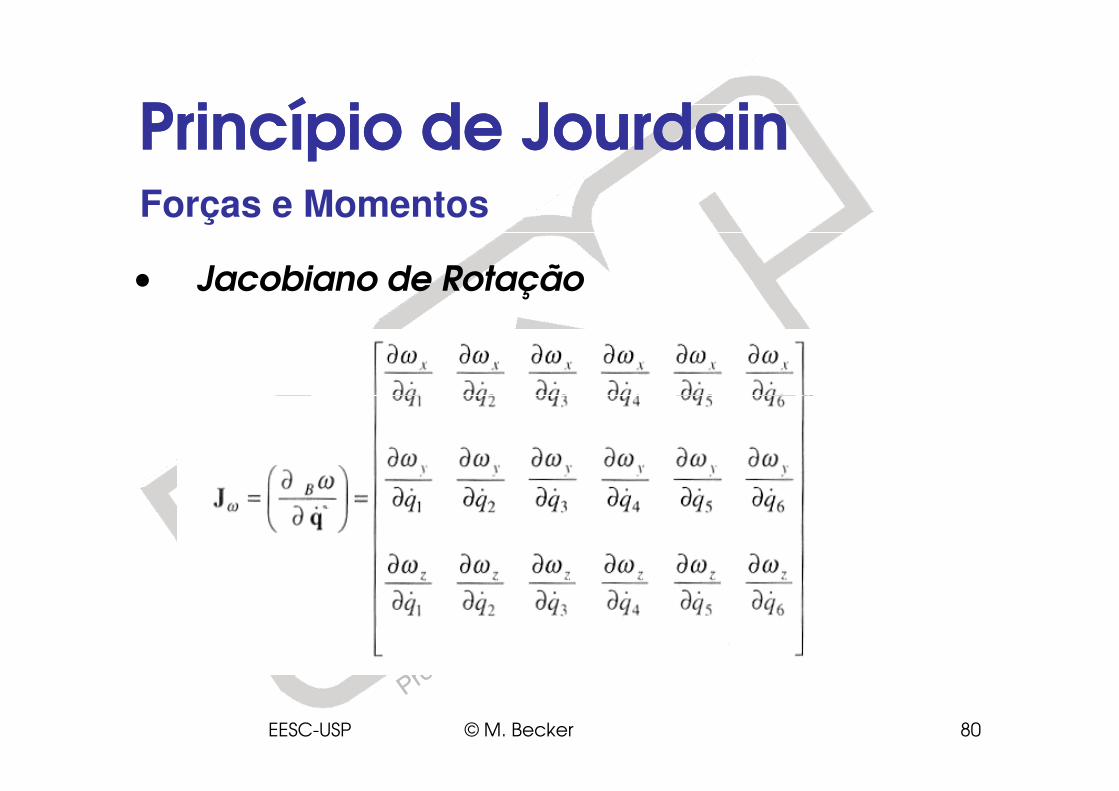
Princípio de JourdainPrincípio de JourdainForças e Momentos
• Jacobiano de Rotação
80EESC-USP © M. Becker
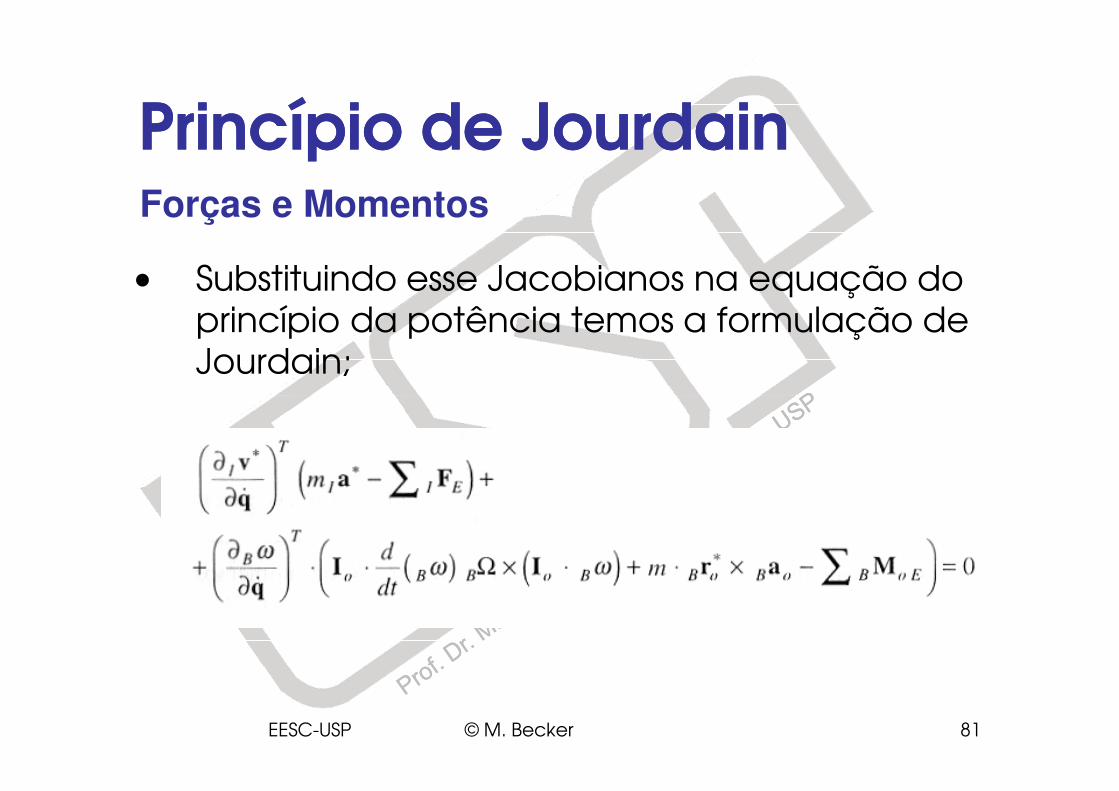
Princípio de JourdainPrincípio de JourdainForças e Momentos
• Substituindo esse Jacobianos na equação do princípio da potência temos a formulação de Jourdain;
81EESC-USP © M. Becker
Usando o Método de Usando o Método de JourdainJourdainSistemas de Corpos Rígidos - Giroscópio
• O objetivo deste exemplo é ilustrar a aplicação do princípio de Jourdain para a obtenção das equações diferenciais de movimento do Giroscópio sem que seja
82
movimento do Giroscópio sem que seja necessário a representação e cálculo das forças de reação entre os vário corpos;
EESC-USP © M. Becker
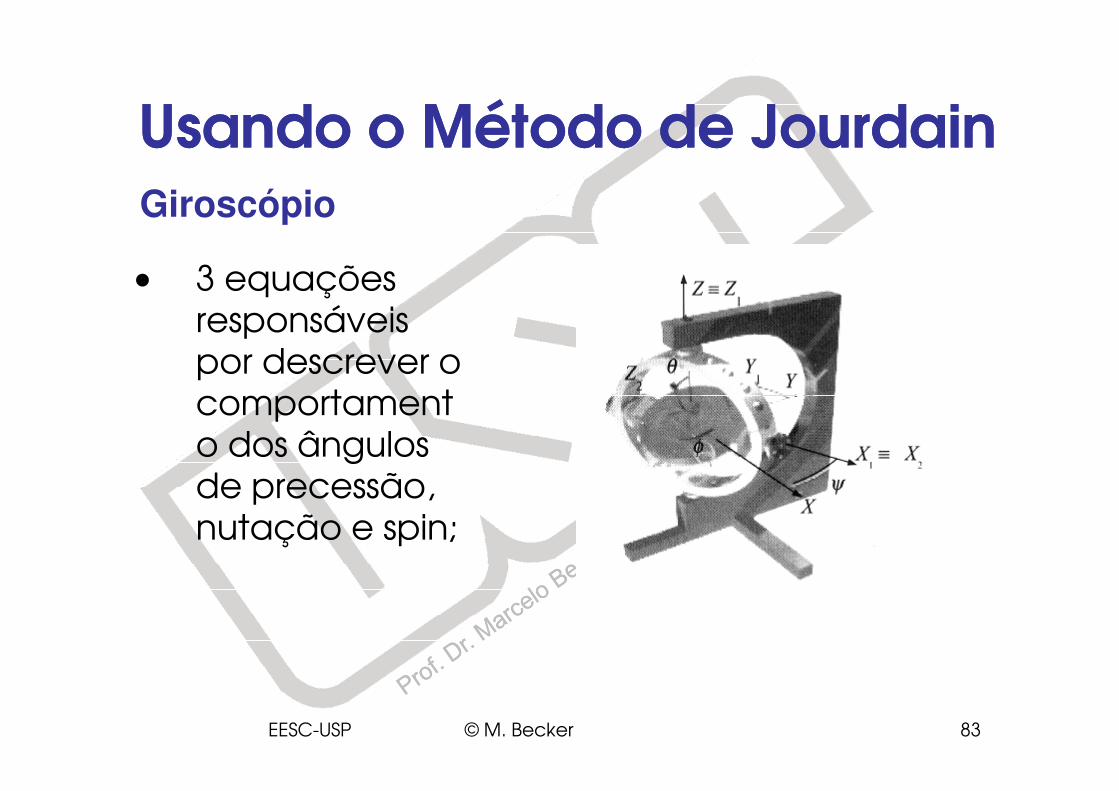
Usando o Método de Usando o Método de JourdainJourdainGiroscópio
• 3 equações responsáveis por descrever o comportament
83
comportamento dos ângulos de precessão, nutação e spin;
EESC-USP © M. Becker
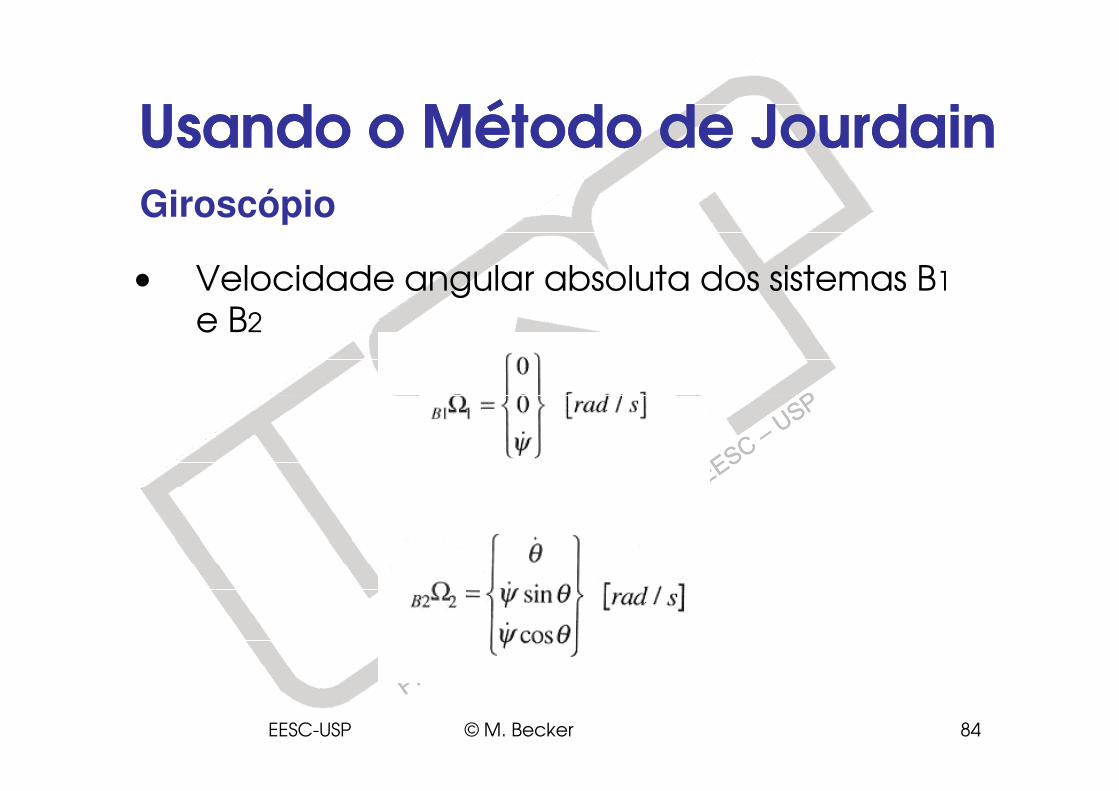
Usando o Método de Usando o Método de JourdainJourdainGiroscópio
• Velocidade angular absoluta dos sistemas B1
e B2
84EESC-USP © M. Becker
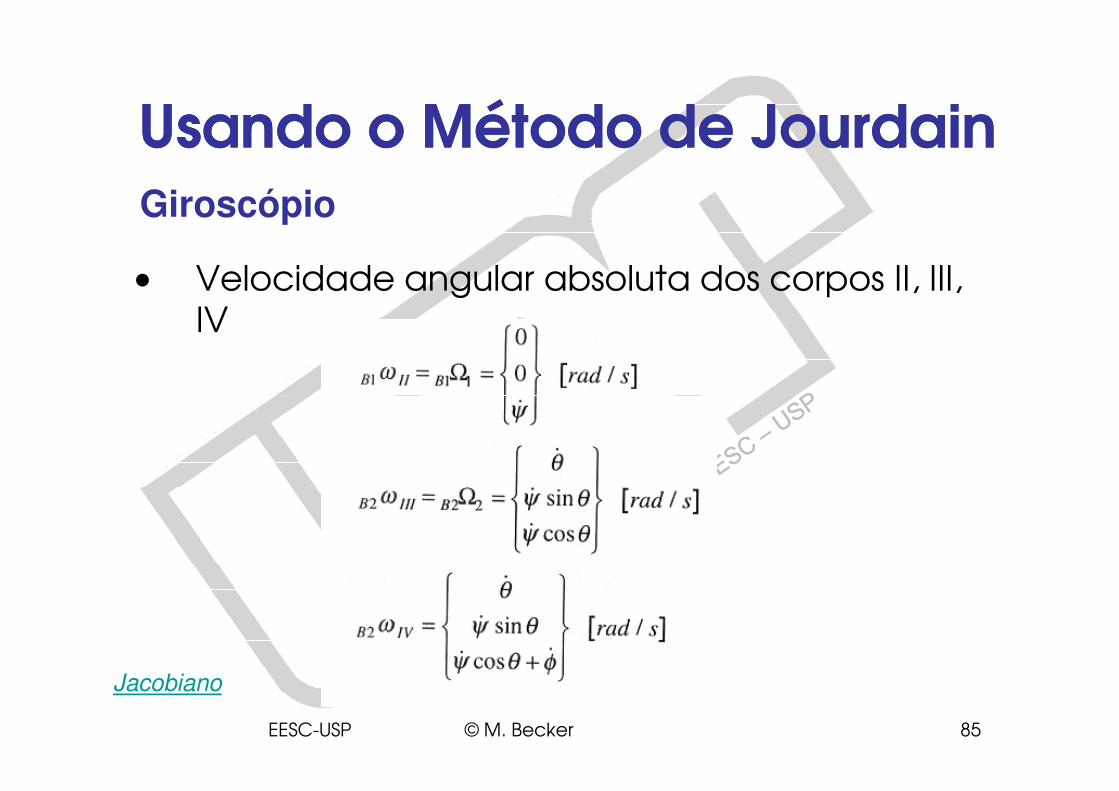
Usando o Método de Usando o Método de JourdainJourdainGiroscópio
• Velocidade angular absoluta dos corpos II, III, IV
85
Jacobiano
EESC-USP © M. Becker
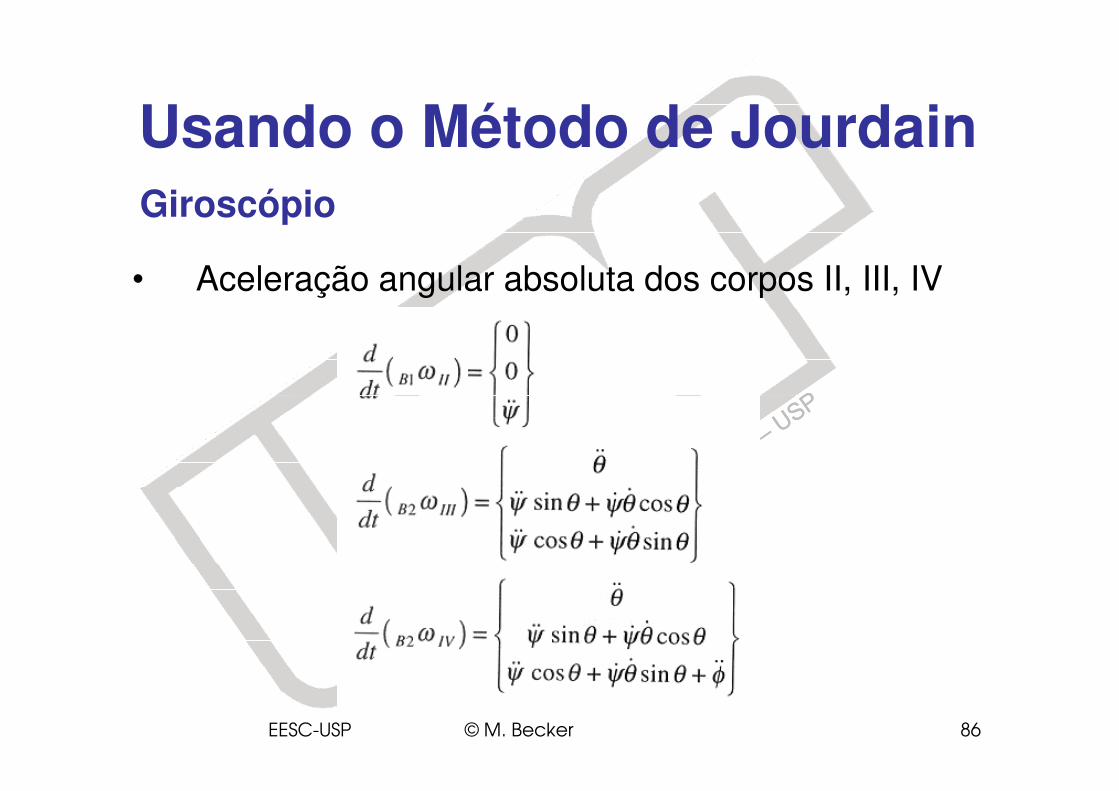
Usando o Método de JourdainGiroscópio
• Aceleração angular absoluta dos corpos II, III, IV
86EESC-USP © M. Becker
Usando o Método de JourdainGiroscópio
• Velocidade Linear absoluta dos corpos II, III, IV
87
• Aceleração Linear absoluta dos corpos II, III, IV
EESC-USP © M. Becker
Usando o Método de JourdainGiroscópio
• Vetor formado pelas coordenadas mínimas de velocidade dos corpos;
q&
88EESC-USP © M. Becker
Usando o Método de JourdainGiroscópio
• Jacobiano de Translação do corpo II;
89EESC-USP © M. Becker
Usando o Método de JourdainGiroscópio
• Jacobiano de Translação do corpo III;
90EESC-USP © M. Becker
Usando o Método de JourdainGiroscópio
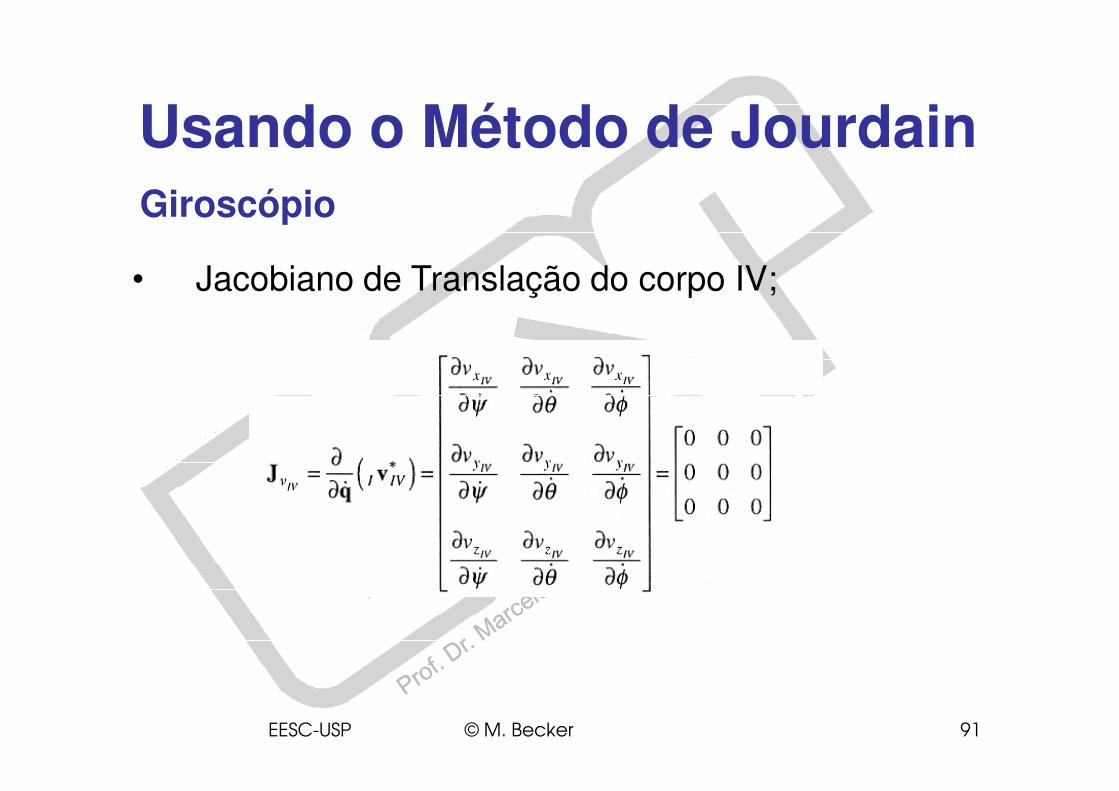
• Jacobiano de Translação do corpo IV;
91EESC-USP © M. Becker
Usando o Método de JourdainGiroscópio
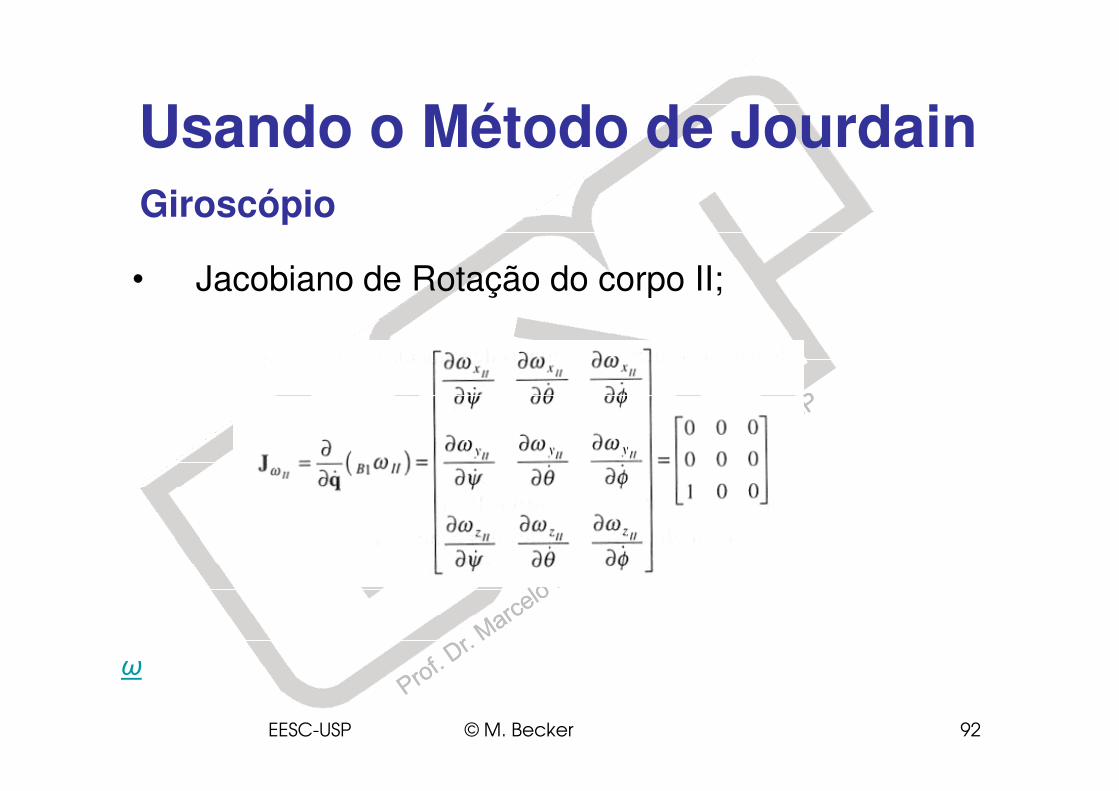
• Jacobiano de Rotação do corpo II;
92
ω
EESC-USP © M. Becker
Usando o Método de JourdainGiroscópio
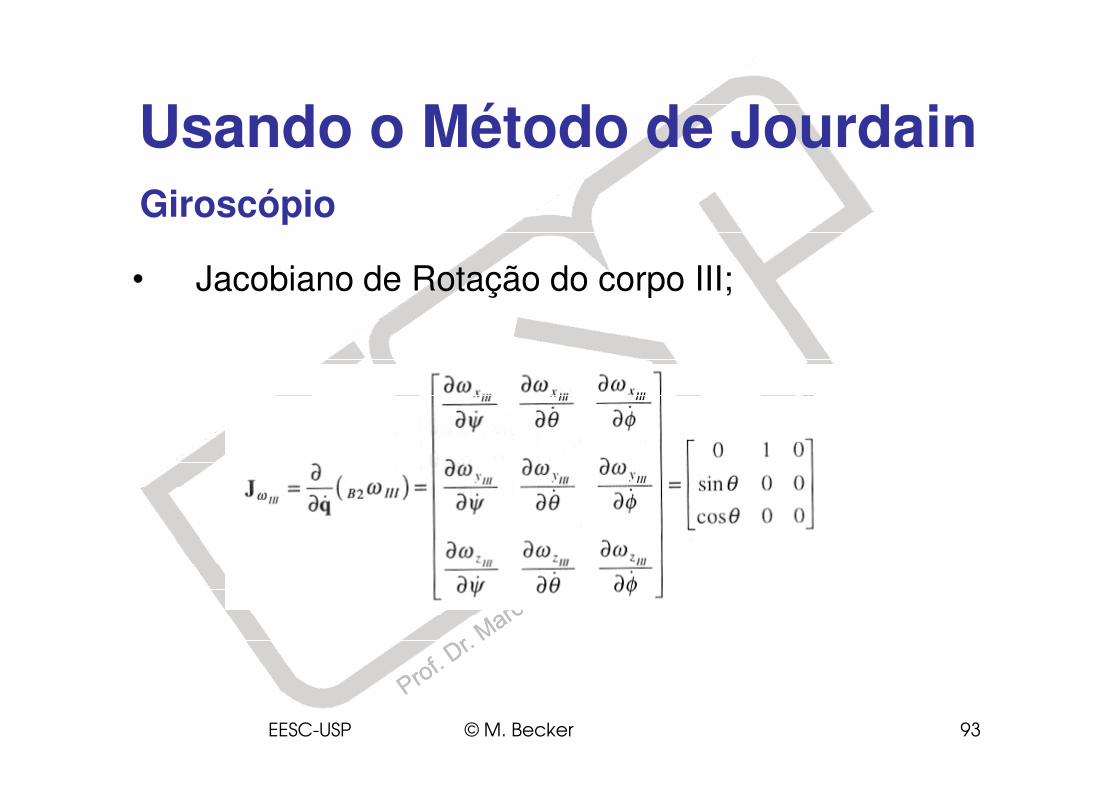
• Jacobiano de Rotação do corpo III;
93EESC-USP © M. Becker
Usando o Método de JourdainGiroscópio
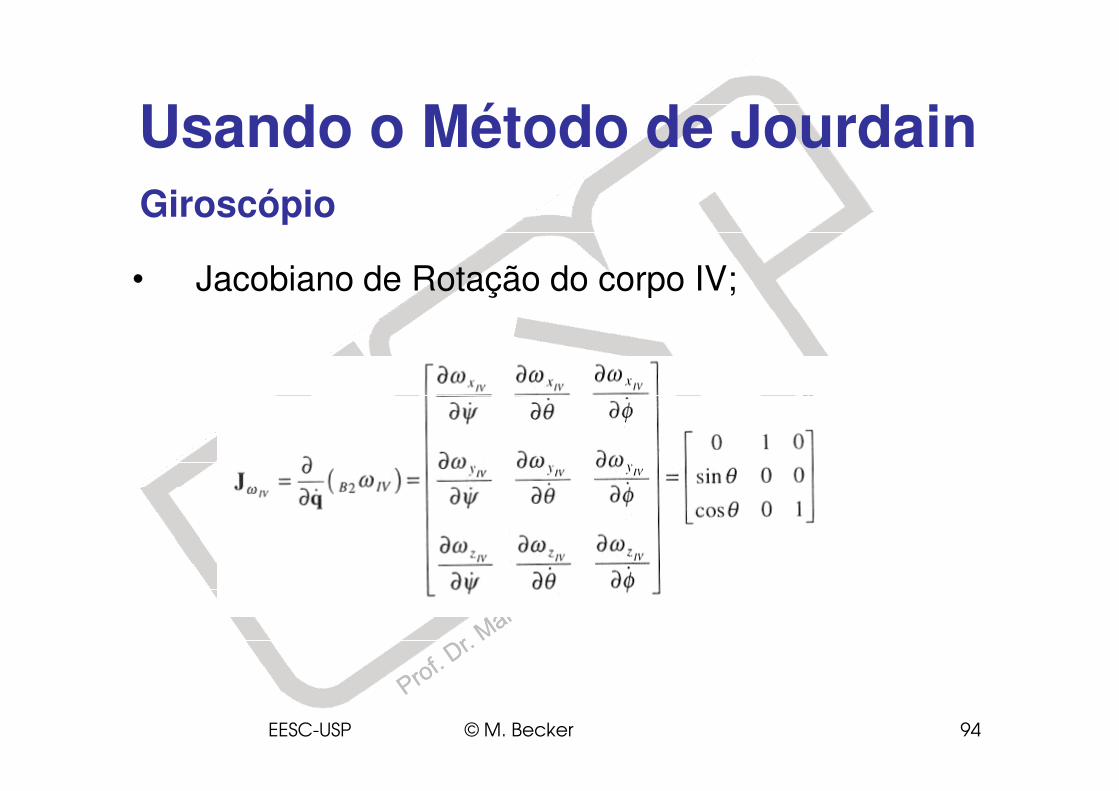
• Jacobiano de Rotação do corpo IV;
94EESC-USP © M. Becker
Usando o Método de JourdainGiroscópio
• As únicas forças externas aplicadas sobre os corpos II, III, IV são as forças peso;
95EESC-USP © M. Becker
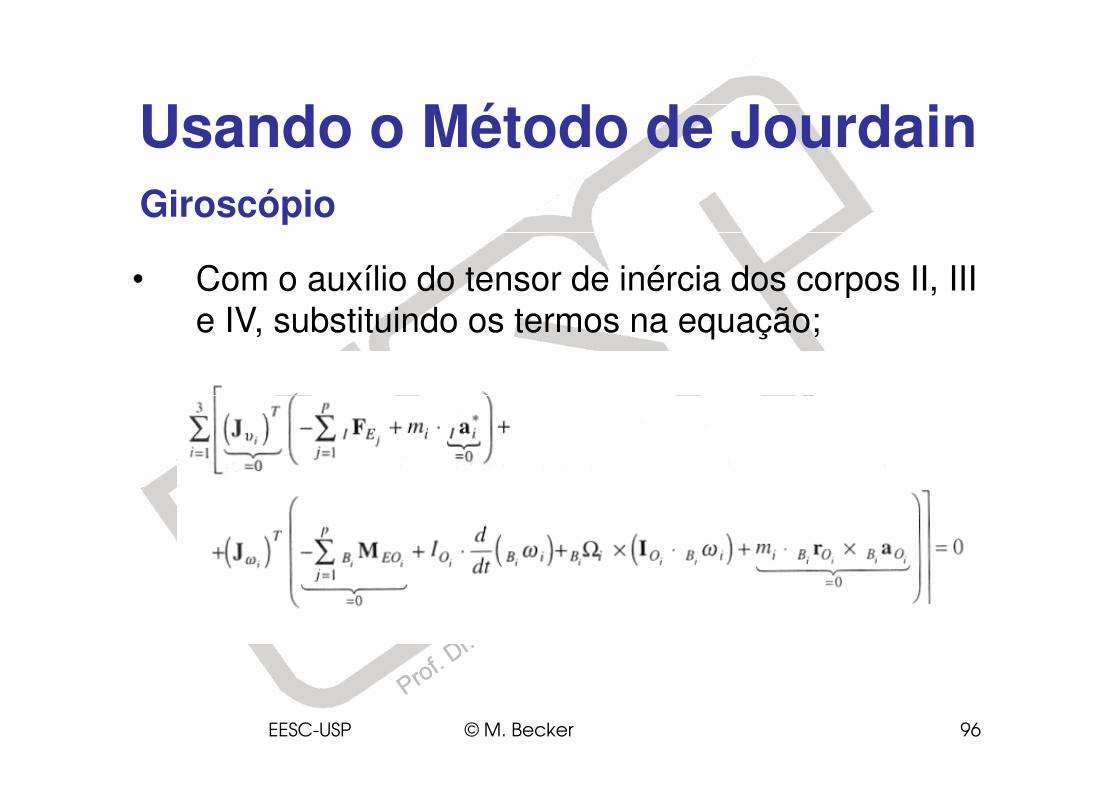
Usando o Método de JourdainGiroscópio
• Com o auxílio do tensor de inércia dos corpos II, III e IV, substituindo os termos na equação;
96EESC-USP © M. Becker
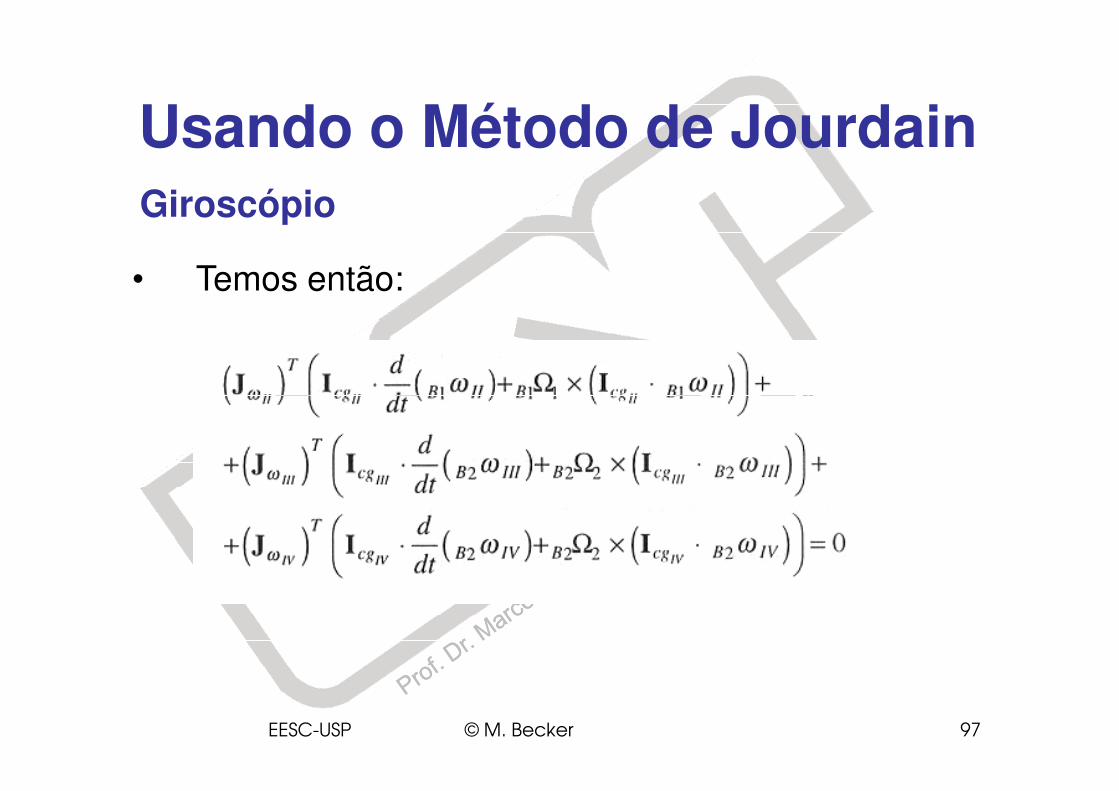
Usando o Método de JourdainGiroscópio
• Temos então:
97EESC-USP © M. Becker
Usando o Método de JourdainGiroscópio
• Substituindo os Jacobianos nas equações anteriores e resolvendo os respectivos produtos escalares e vetoriais chega-se então às 3 equações diferenciais de movimento;
98
equações diferenciais de movimento;
EESC-USP © M. Becker
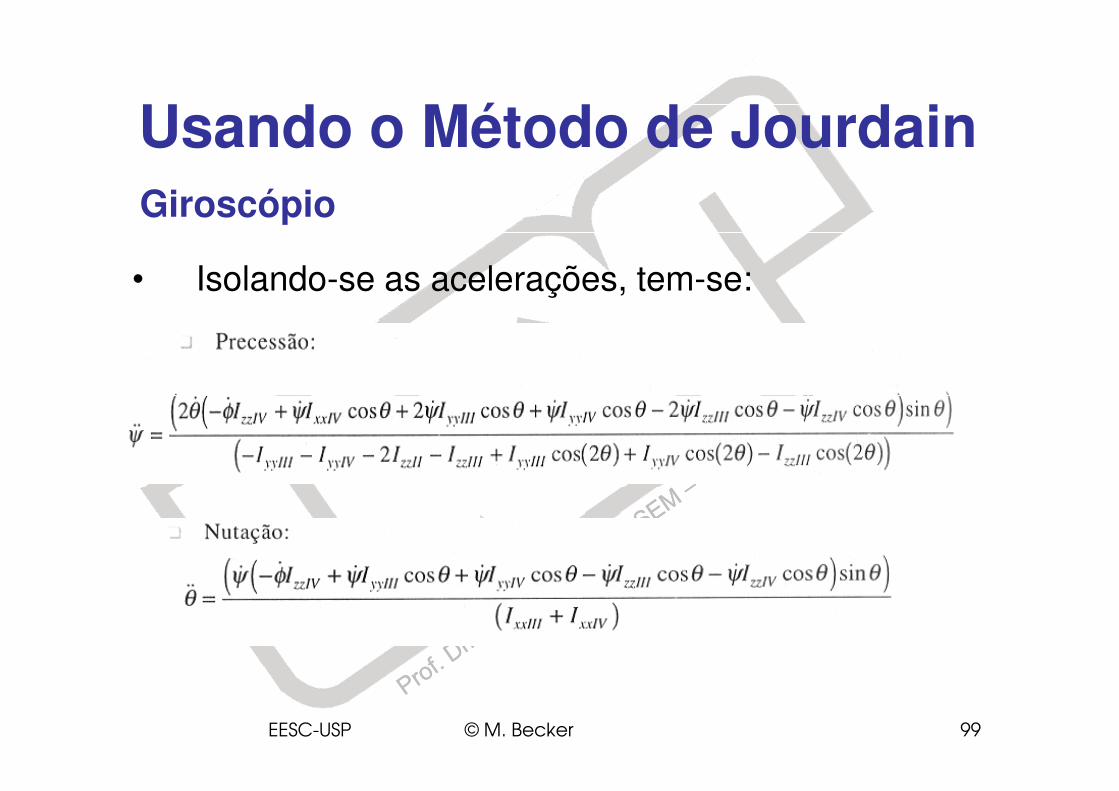
Usando o Método de JourdainGiroscópio
• Isolando-se as acelerações, tem-se:
99EESC-USP © M. Becker
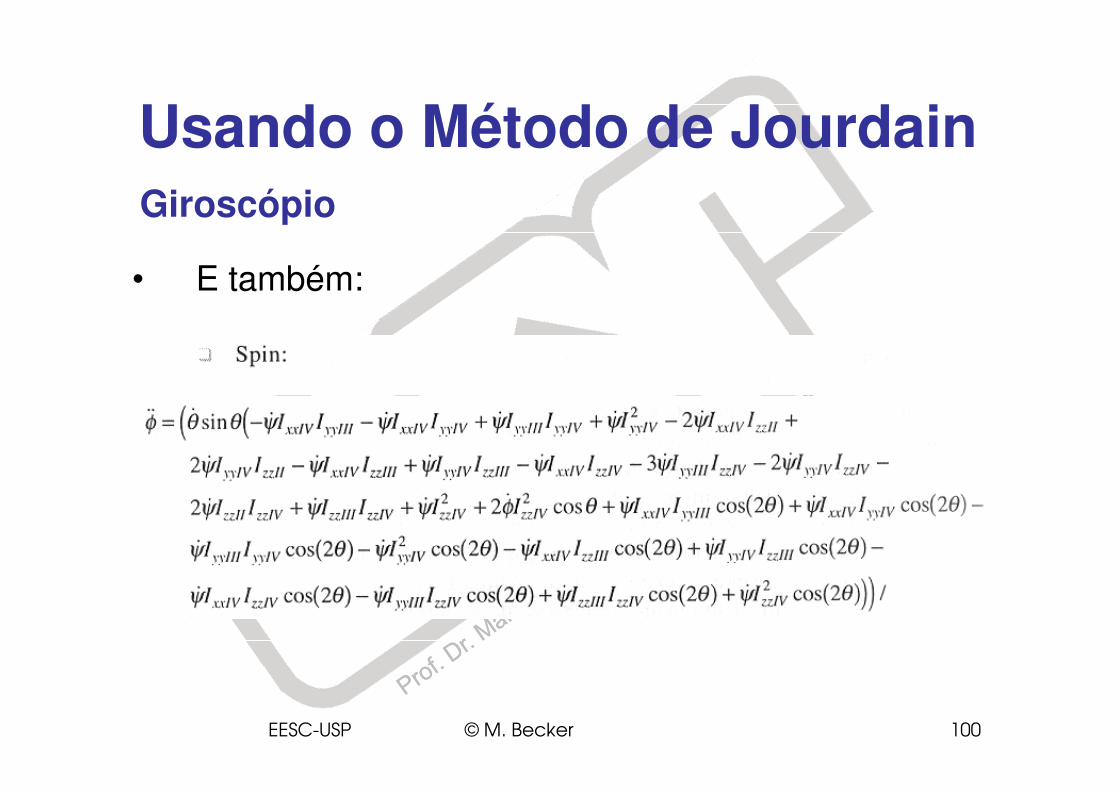
Usando o Método de JourdainGiroscópio
• E também:
100EESC-USP © M. Becker
•• IntroduçãoIntrodução
•• Sist. Sist. MultiMulti--corposcorpos no Planono Plano
•• Sist. Sist. MultiMulti--corposcorpos no Espaçono Espaço
Sumário da AulaSumário da Aula
•• Sist. Sist. MultiMulti--corposcorpos no Espaçono Espaço
•• Princípio de Princípio de JordainJordain
•• AplicaçõesAplicações
EESC-USP © M. Becker 101/67
Aplicações em SatélitesSatélite
• Nesse item, o método Newton-Euler-Jourdain é aplicado a um sistema mecânico de corpos rígidos, distante da grande maioria de nos estudantes;
102
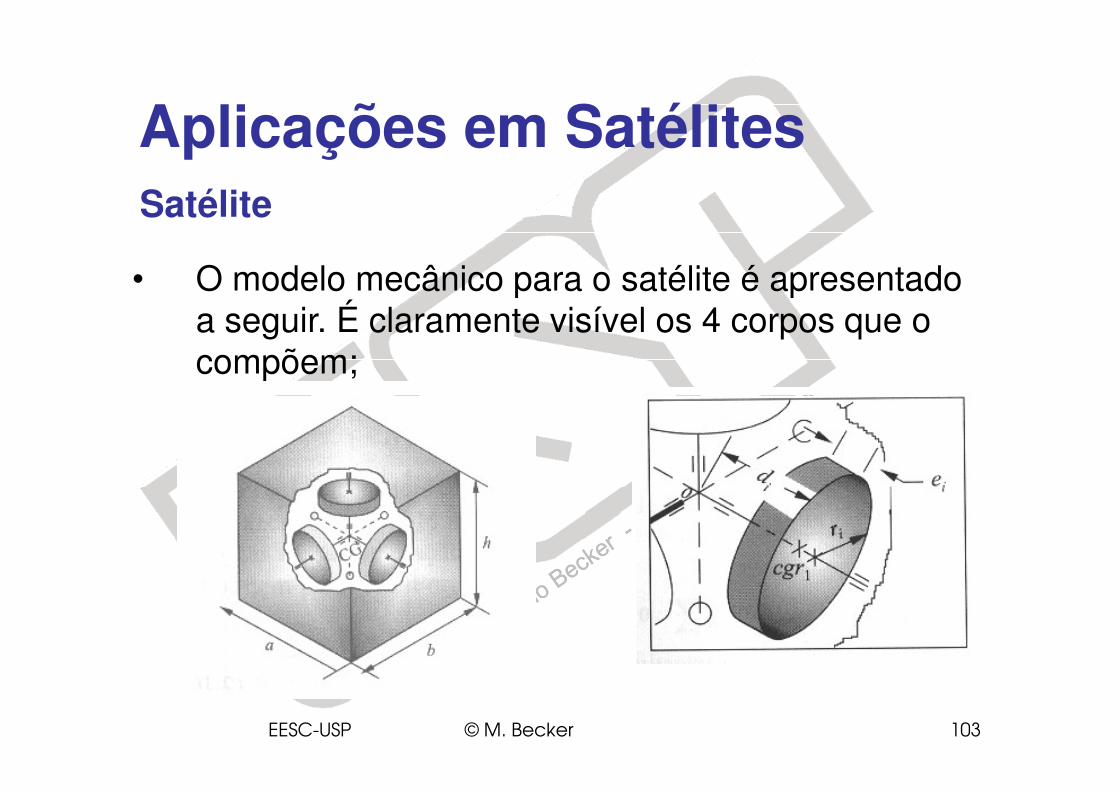
estudantes;• O sistema em questão é composto por um corpo
principal e 3 rotores internos dispostos ortogonalmente entre si.
EESC-USP © M. Becker
Aplicações em SatélitesSatélite
• O modelo mecânico para o satélite é apresentado a seguir. É claramente visível os 4 corpos que o compõem;
103EESC-USP © M. Becker
Aplicações em SatélitesSatélite
• O satélite, que representa um sistema de múltiplos corpos sem equações de vínculo, apresenta 6 graus de liberdade, sendo 3 deslocamentos lineares, que definem sua órbita em torno da terra,
104
lineares, que definem sua órbita em torno da terra, e 3 rotações em torno de seu centro de massa, que definem sua atitude;
EESC-USP © M. Becker
Aplicações em SatélitesSatélite
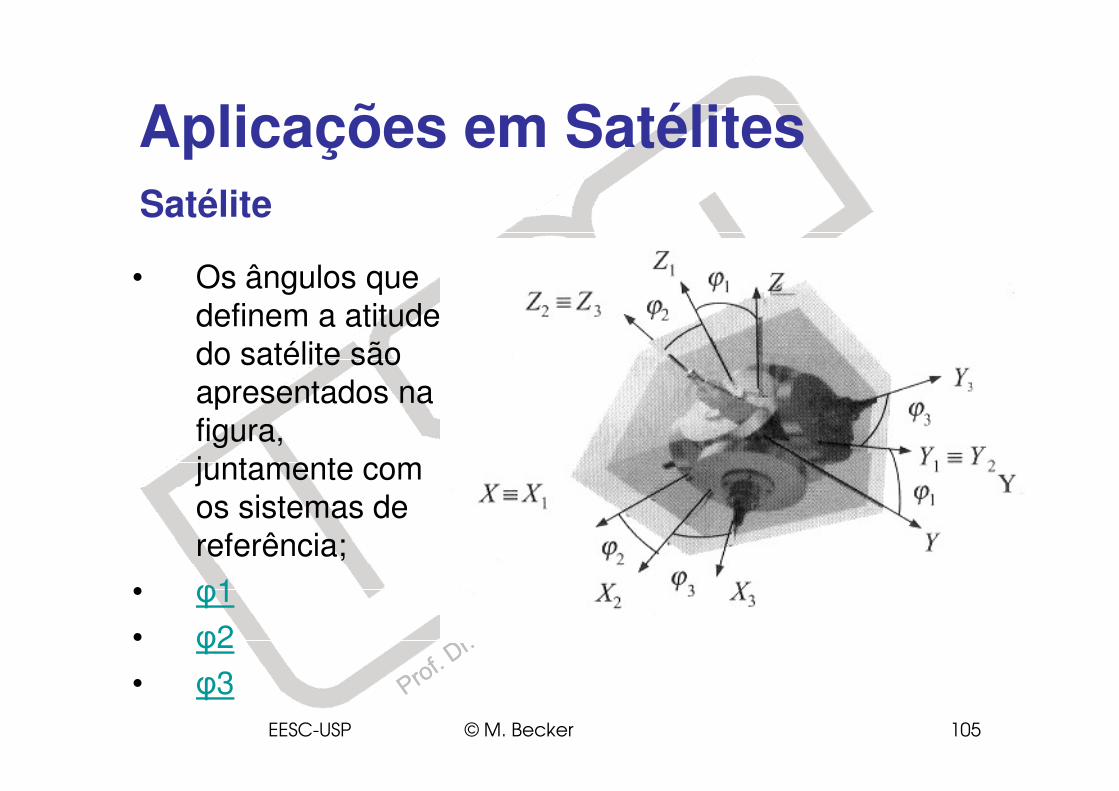
• Os ângulos que definem a atitude do satélite são apresentados na
105
apresentados na figura, juntamente com os sistemas de referência;
• φ1• φ2• φ3
EESC-USP © M. Becker
Aplicações em SatélitesÓrbitas
• Órbitas descritas por vetores ortogonais ao centro de cada face do satélite. Estas trajetórias são resultados das simulações em que apenas um rotor interno na direção X3 esta em funcionamento;
106
rotor interno na direção X3 esta em funcionamento;
]/[35][0 33 sraderad RR == ϕϕ &
EESC-USP © M. Becker
Aplicações em Satélites
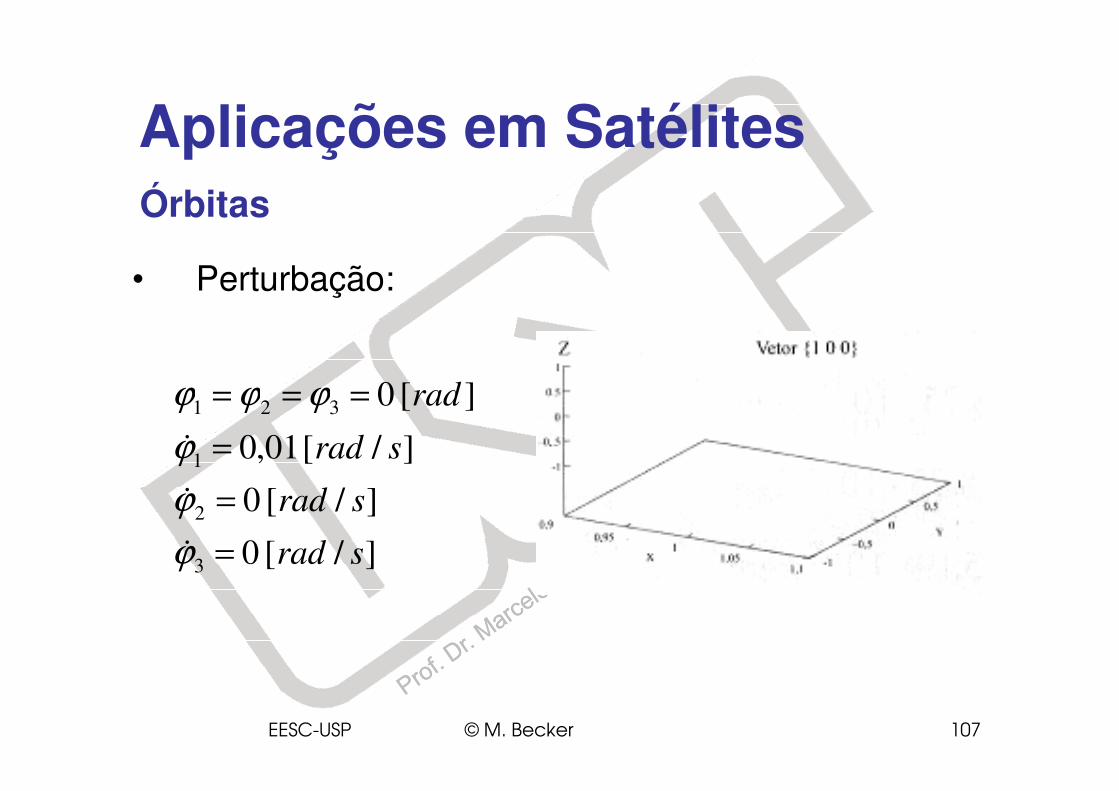
• Perturbação:
Órbitas
][0 rad=== ϕϕϕ
107
]/[0
]/[0
]/[01,0
][0
3
2
1
321
srad
srad
srad
rad
=
=
=
===
ϕ
ϕ
ϕ
ϕϕϕ
&
&
&
EESC-USP © M. Becker
Aplicações em Satélites
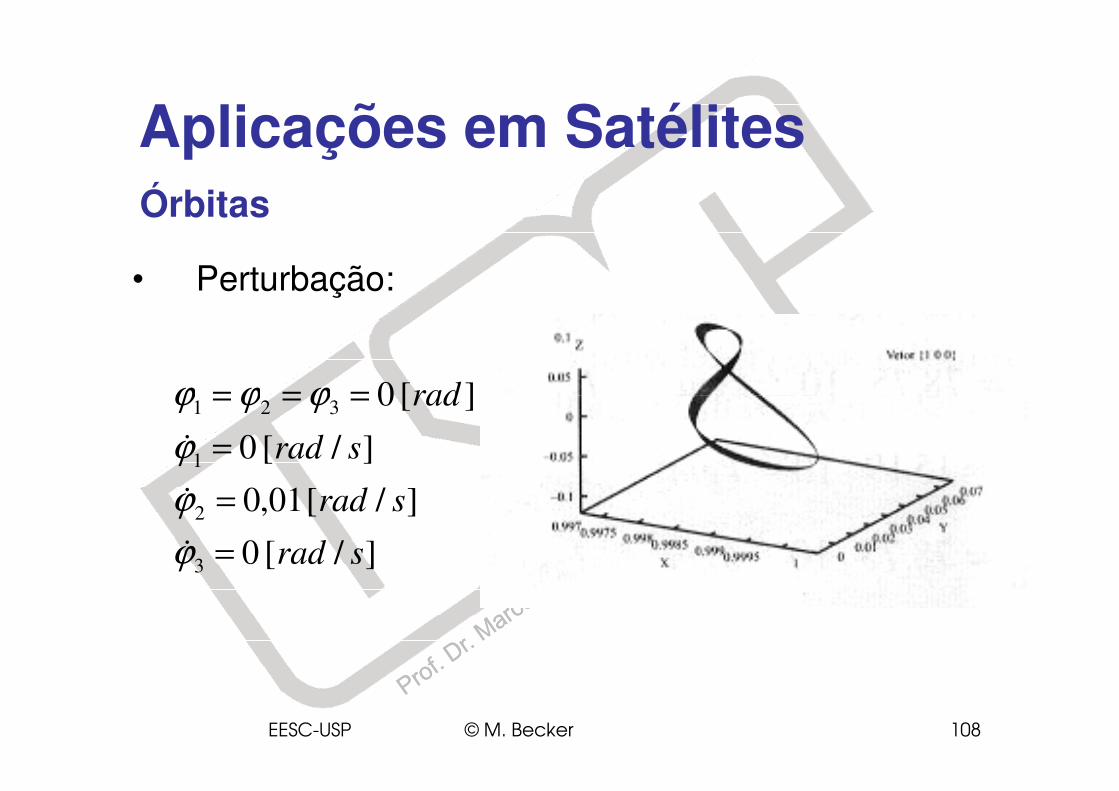
• Perturbação:
Órbitas
][0 rad=== ϕϕϕ
108
]/[0
]/[01,0
]/[0
][0
3
2
1
321
srad
srad
srad
rad
=
=
=
===
ϕ
ϕ
ϕ
ϕϕϕ
&
&
&
EESC-USP © M. Becker
Aplicações em Satélites
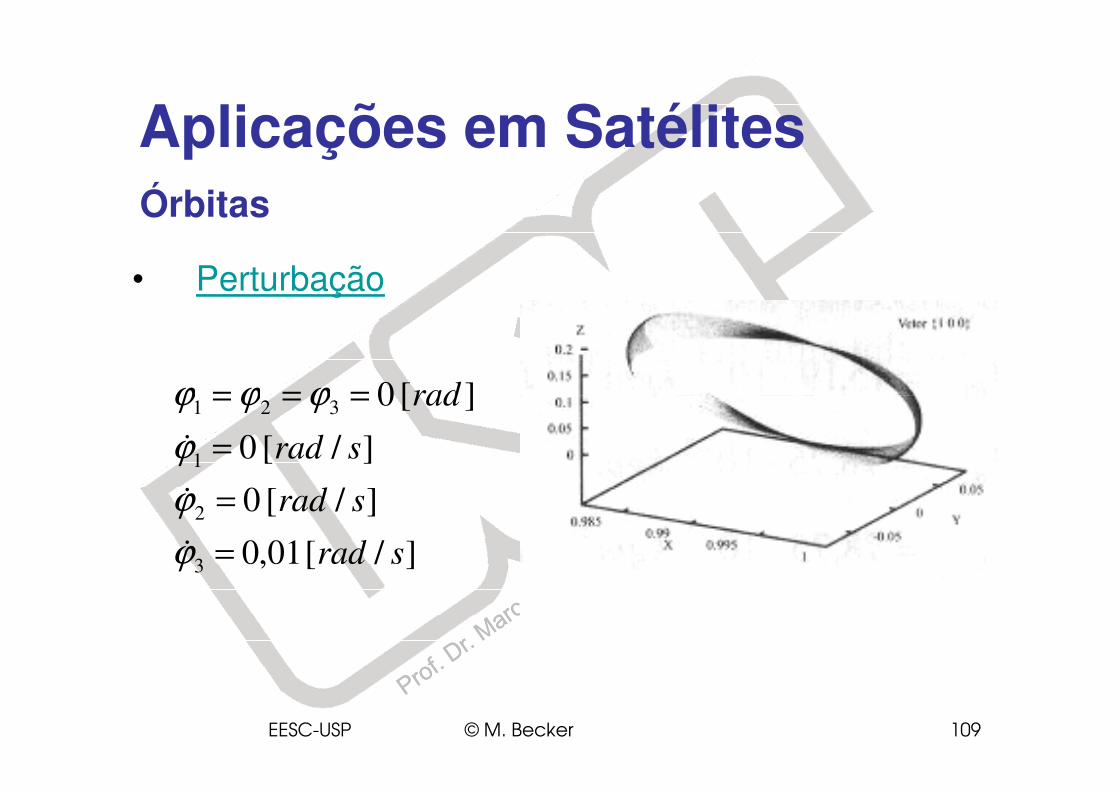
• Perturbação
Órbitas
][0 rad=== ϕϕϕ
109
]/[01,0
]/[0
]/[0
][0
3
2
1
321
srad
srad
srad
rad
=
=
=
===
ϕ
ϕ
ϕ
ϕϕϕ
&
&
&
EESC-USP © M. Becker
Aplicações em Satélites
• Experimental 1• Simulação 1• Experimental 2
Simulações
110
• Experimental 2• Simulação 2
EESC-USP © M. Becker