rt v10 030807 - hochschule · pdf filevorlesung regelungstechnik prof pohl 1 vorlesung 10...
TRANSCRIPT
Vorlesung Regelungstechnik Prof Pohl
1
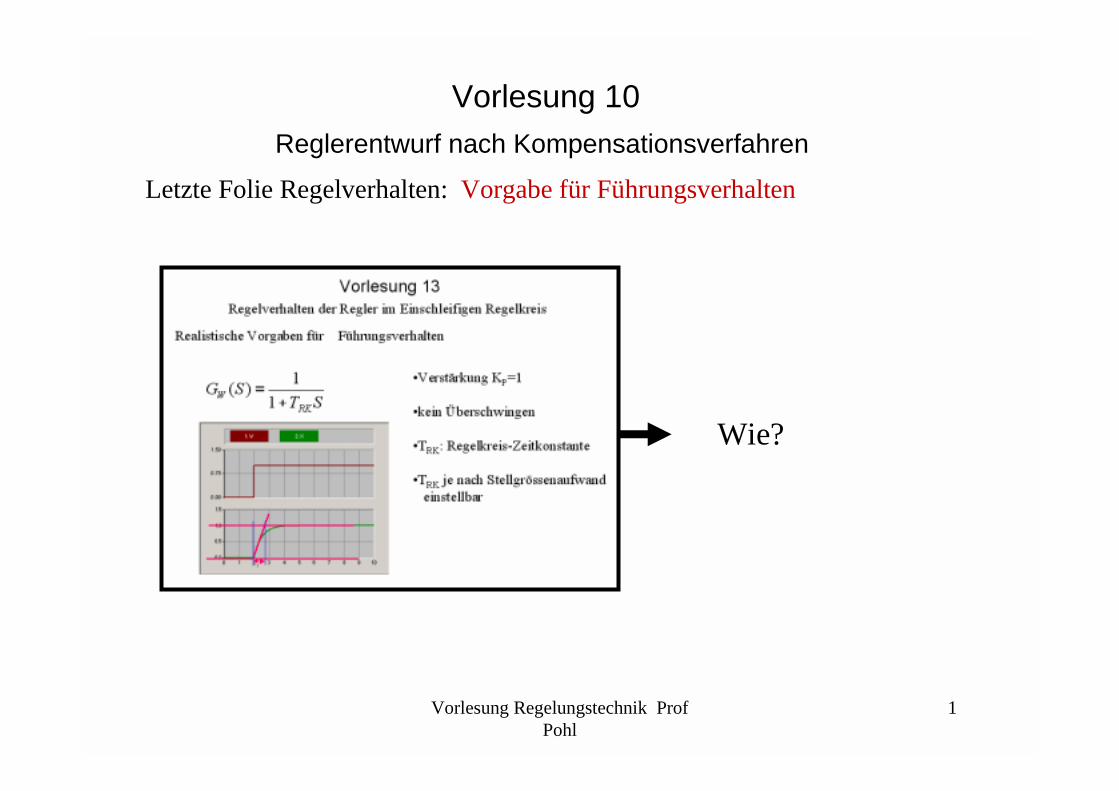
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
Letzte Folie Regelverhalten: Vorgabe für Führungsverhalten
Wie?
Vorlesung Regelungstechnik Prof Pohl
2
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
Lösung:
Die Toilettenspülung
Vorlesung Regelungstechnik Prof Pohl
3
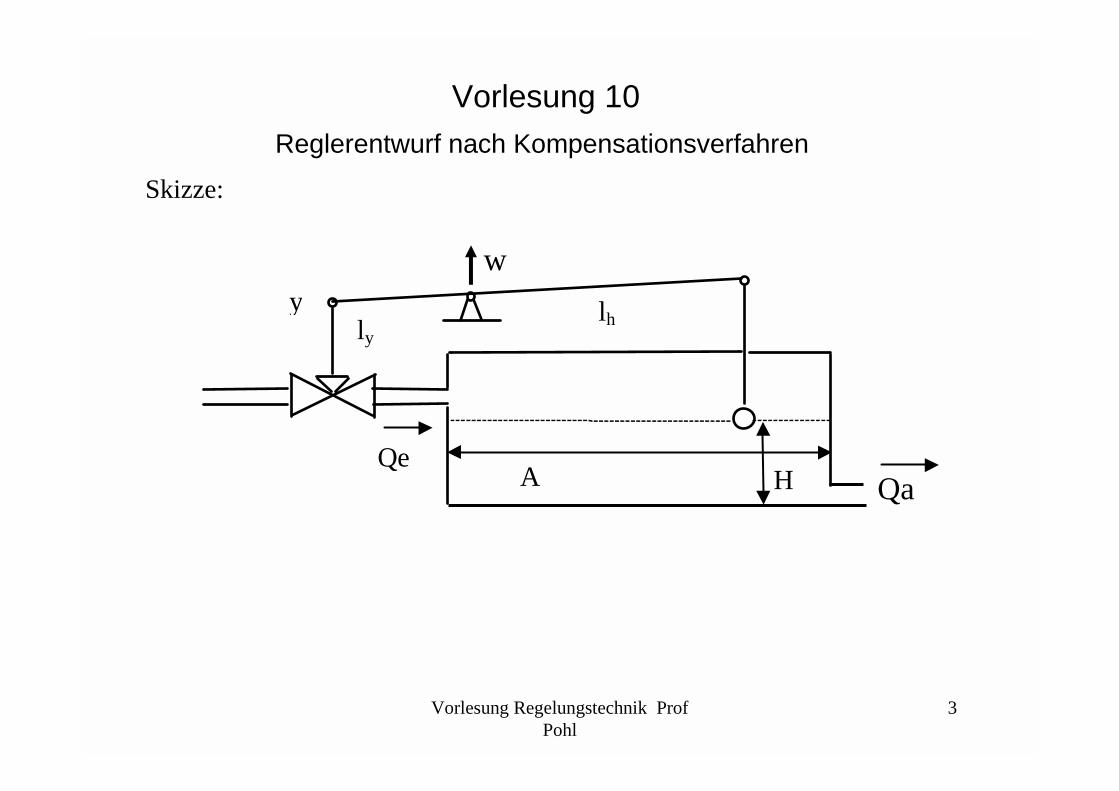
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
Skizze:
y
HAQe
lhly
w
Qa
Vorlesung Regelungstechnik Prof Pohl
4
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
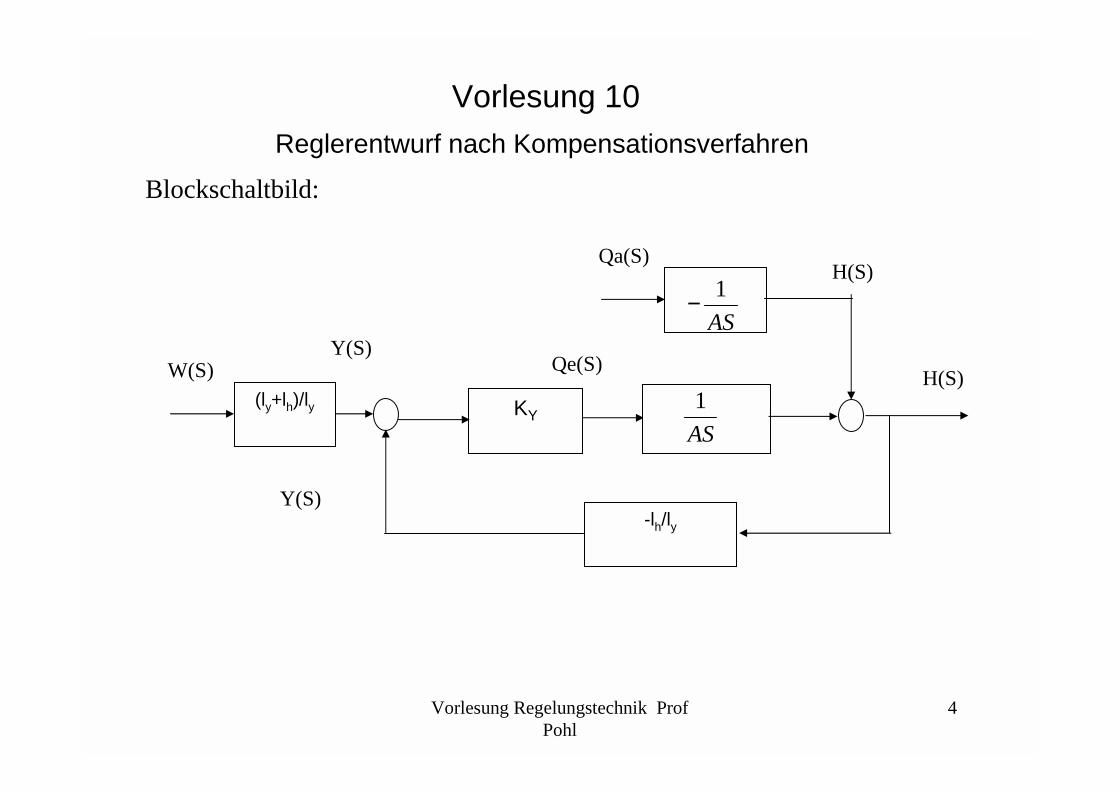
Blockschaltbild:
(ly+lh)/ly
-lh/ly
KY
H(S)
Y(S)
Y(S)W(S) Qe(S)
AS
1
Qa(S)H(S)
AS
1−
Vorlesung Regelungstechnik Prof Pohl
5
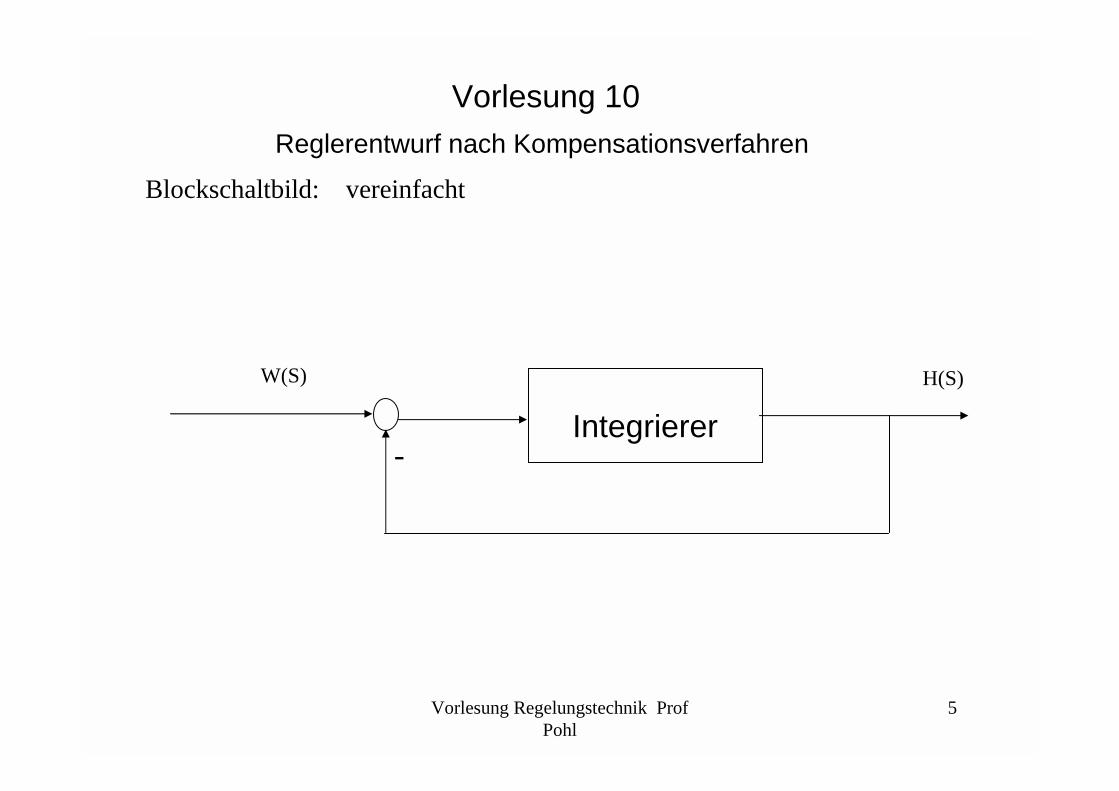
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
Blockschaltbild: vereinfacht
Integrierer
H(S)W(S)
-
Vorlesung Regelungstechnik Prof Pohl
6
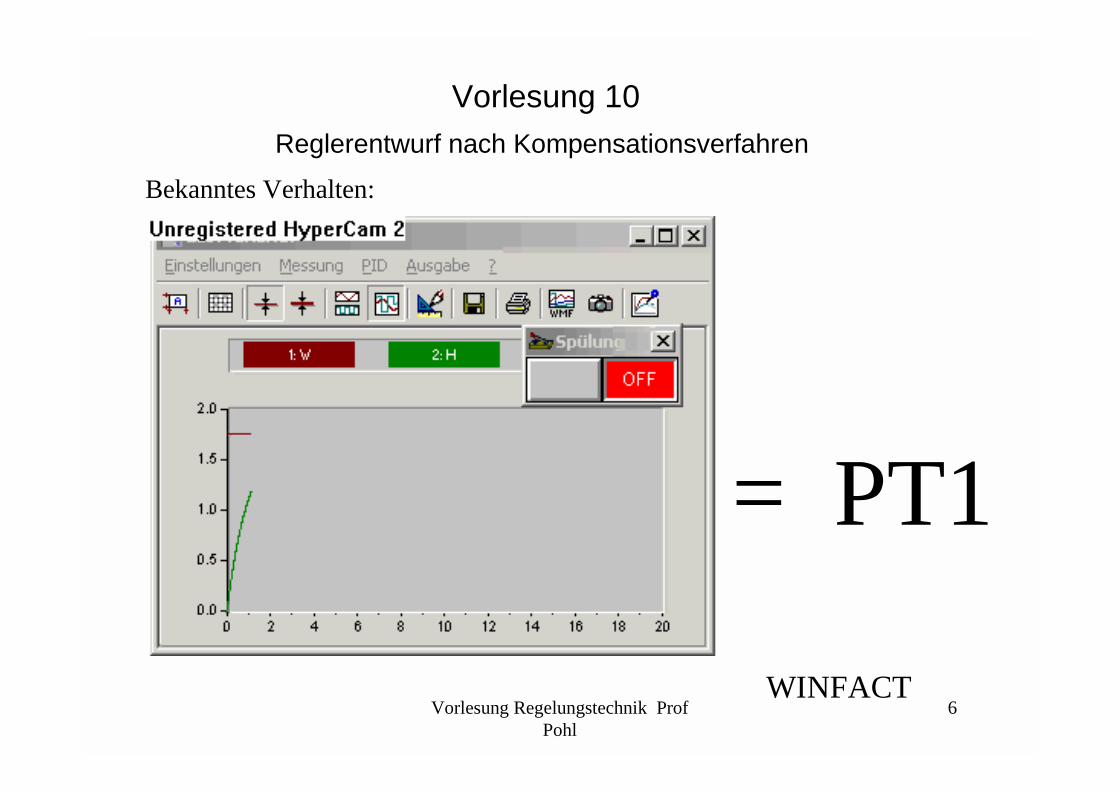
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
Bekanntes Verhalten:
= PT1
WINFACT
Vorlesung Regelungstechnik Prof Pohl
7
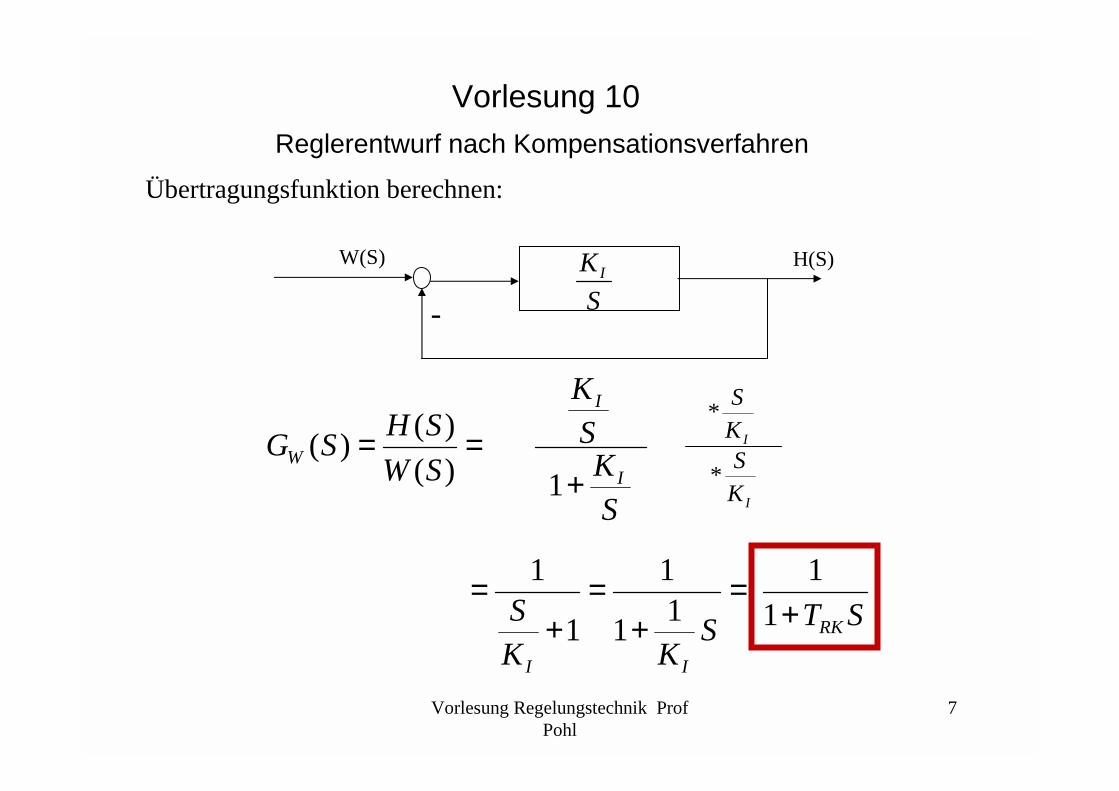
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
Übertragungsfunktion berechnen:
H(S)W(S)
- S
KI
S
KS
K
SW
SHSG
I
I
W
+==
1)(
)()(
STSKK
SRK
II
+=
+=
+=
1
11
1
1
1
1
I
I
K
SK
S
*
*
Vorlesung Regelungstechnik Prof Pohl
8
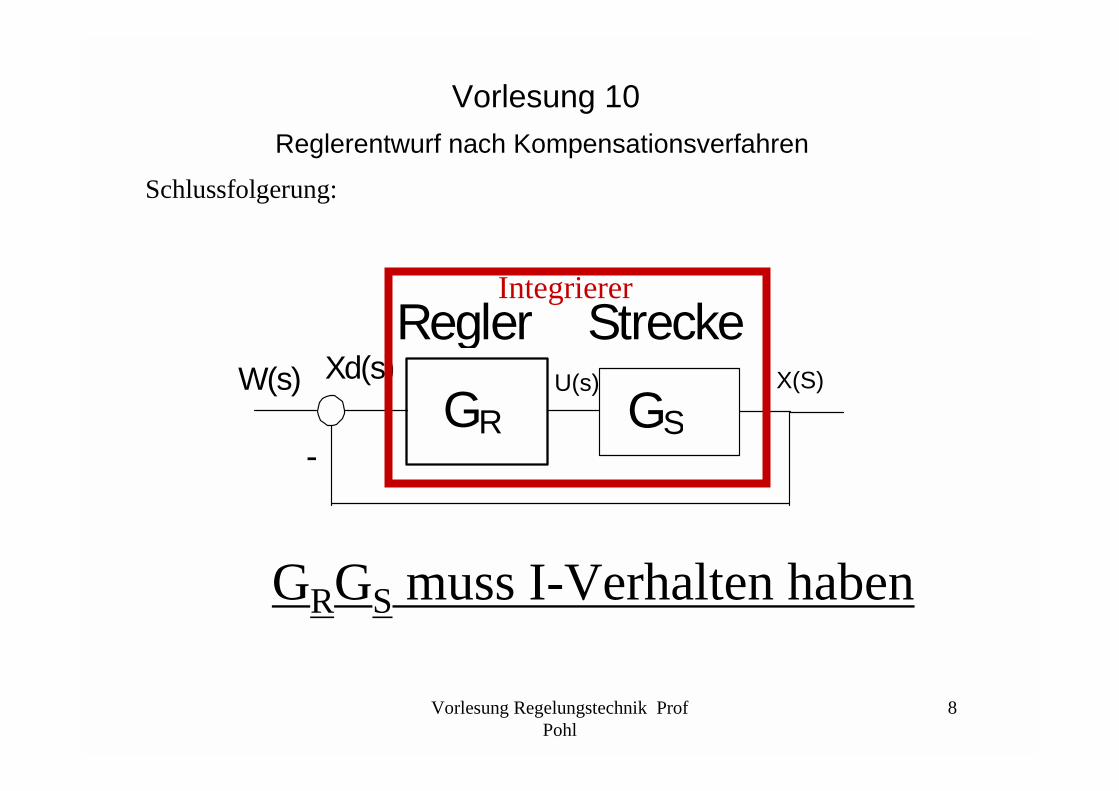
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
Schlussfolgerung:
W(s)GS
-
Y(s)Xd(s)
GR
StreckeReglerU(s) X(S)
GRGS muss I-Verhalten haben
Integrierer
Vorlesung Regelungstechnik Prof Pohl
9
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
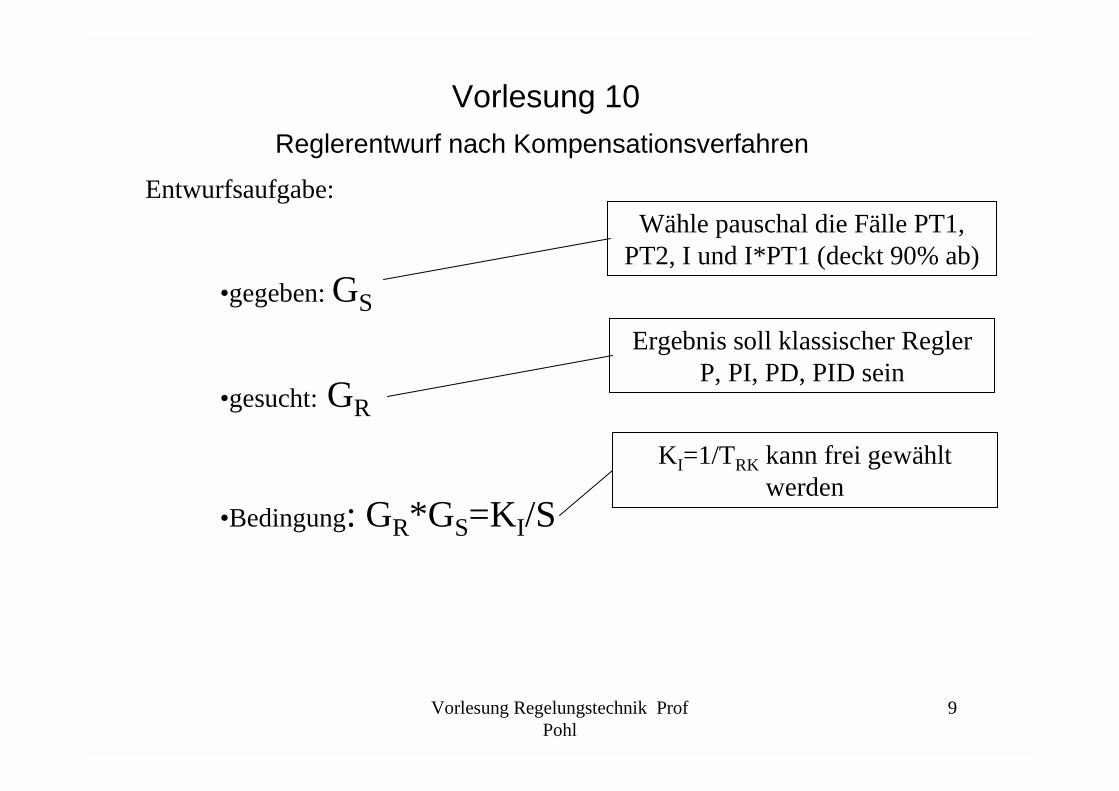
Entwurfsaufgabe:
•gegeben: GS
•gesucht: GR
•Bedingung: GR*GS=KI/S
Wähle pauschal die Fälle PT1, PT2, I und I*PT1 (deckt 90% ab)
Ergebnis soll klassischer ReglerP, PI, PD, PID sein
KI=1/TRK kann frei gewähltwerden
Vorlesung Regelungstechnik Prof Pohl
10
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
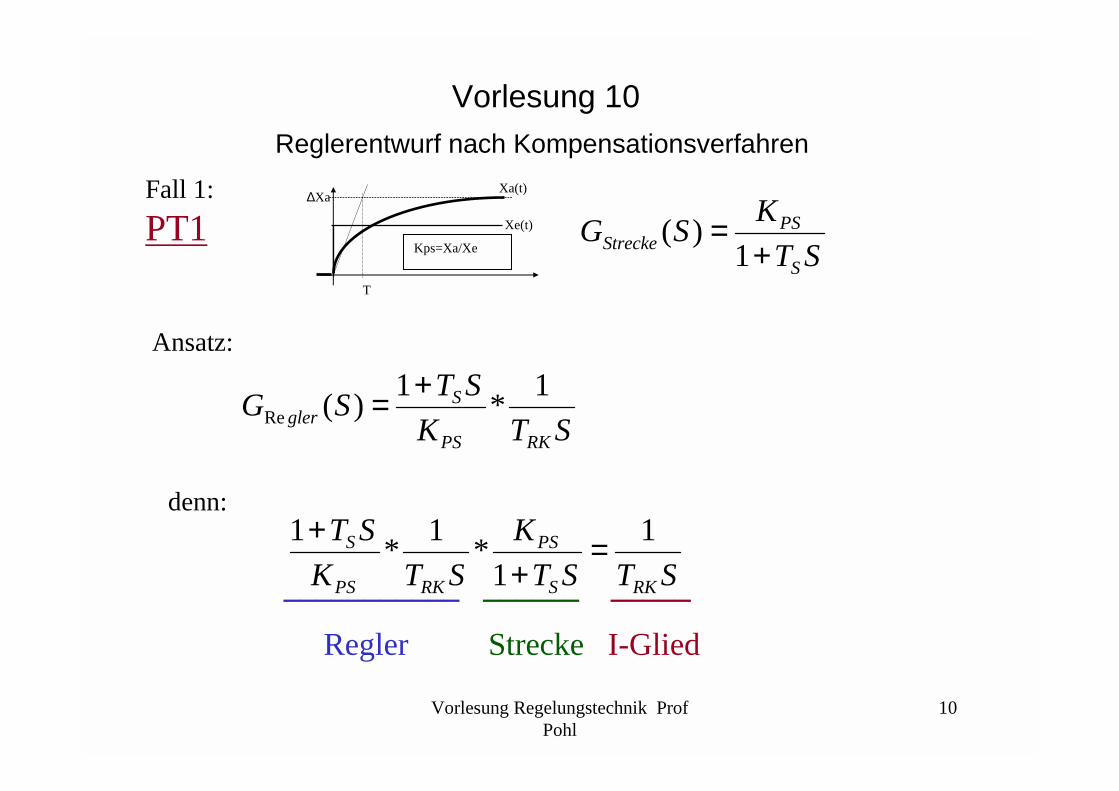
Fall 1:
PT1 Xe(t)
∆XaXa(t)
T
Kps=Xa/Xe ST
KSG
S
PSStrecke +
=1
)(
STK
STSG
RKPS
Sgler
1*
1)(Re
+=
Ansatz:
STST
K
STK
ST
RKS
PS
RKPS
S 1
1*
1*
1 =+
+denn:
___________ ______ _____
Regler Strecke I-Glied
Vorlesung Regelungstechnik Prof Pohl
11
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
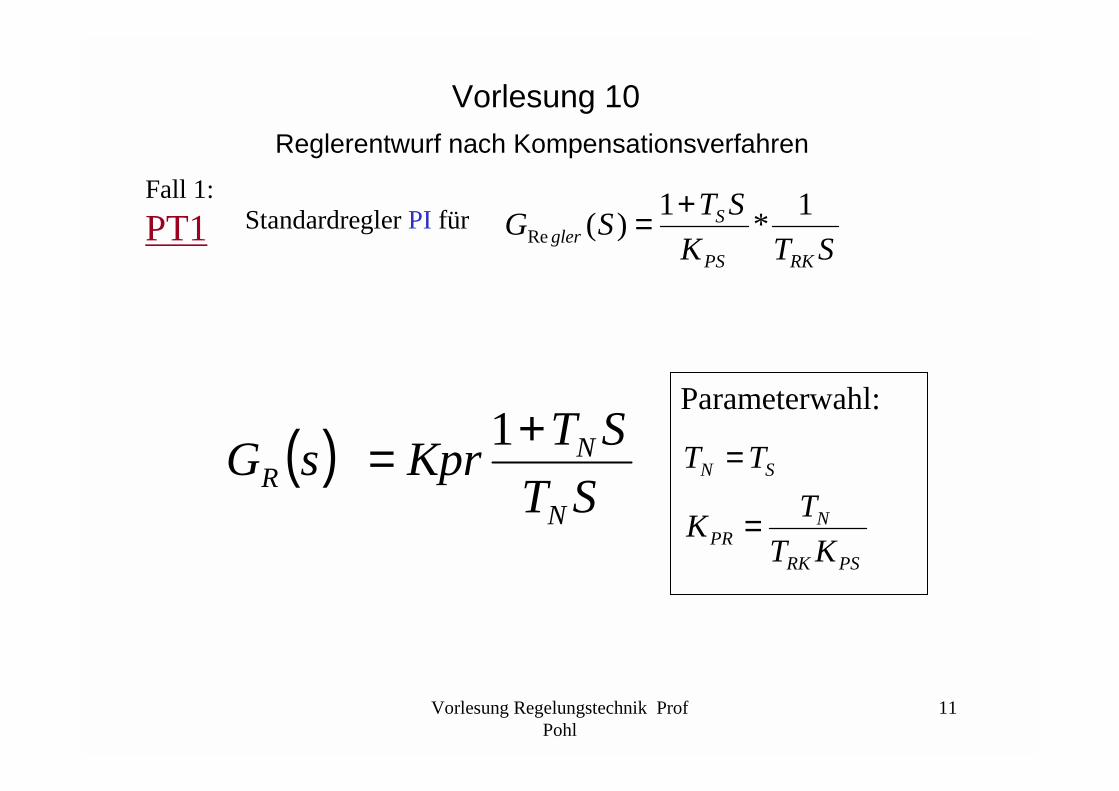
Fall 1:
PT1STK
STSG
RKPS
Sgler
1*
1)(Re
+=Standardregler PI für
( )ST
STKprsG
N
NR
+= 1Parameterwahl:
PSRK
NPR
SN
KT
TK
TT
=
=
Vorlesung Regelungstechnik Prof Pohl
12
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
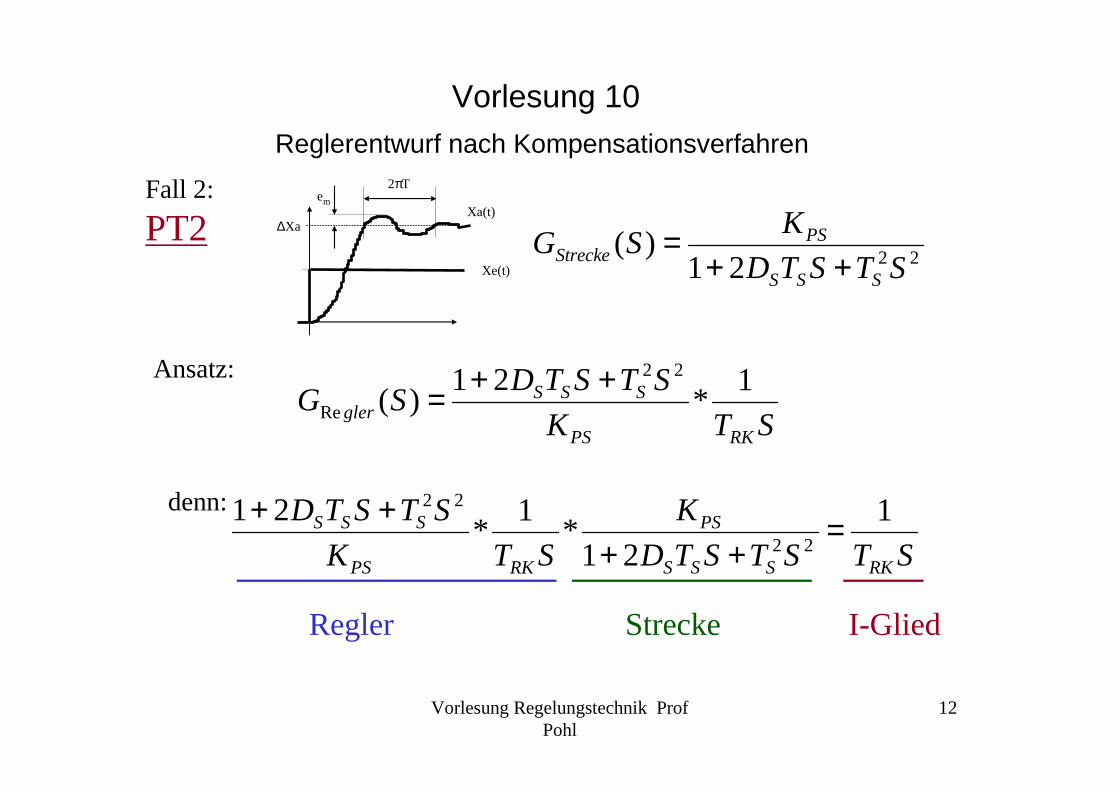
Fall 2:
PT2Xe(t)
∆XaXa(t)
em
2πT
2221)(
STSTD
KSG
SSS
PSStrecke ++
=
Ansatz:
STK
STSTDSG
RKPS
SSSgler
1*
21)(
22
Re
++=
____________________ _______________ _____
Regler Strecke I-Glied
denn:
STSTSTD
K
STK
STSTD
RKSSS
PS
RKPS
SSS 1
21*
1*
2122
22
=++
++
Vorlesung Regelungstechnik Prof Pohl
13
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
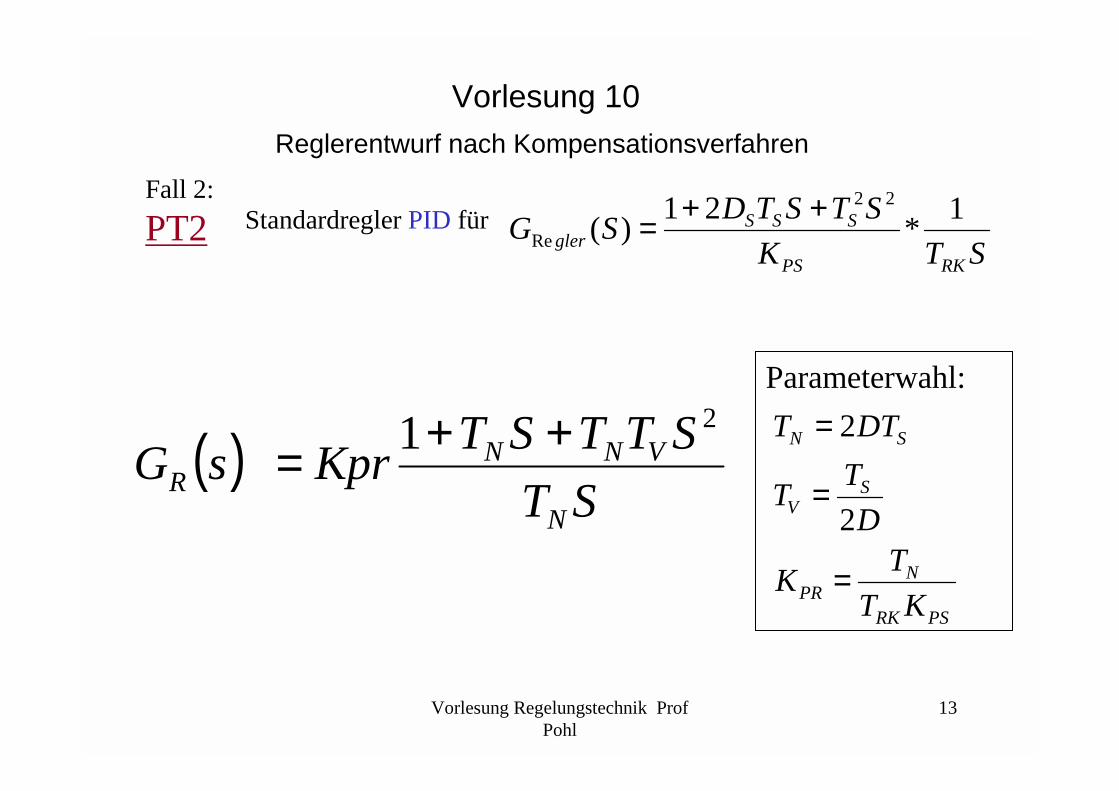
Fall 2:
PT2STK
STSTDSG
RKPS
SSSgler
1*
21)(
22
Re
++=Standardregler PID für
( )ST
STTSTKprsG
N
VNNR
21 ++=
Parameterwahl:
PSRK
NPR
SV
SN
KT
TK
D
TT
DTT
=
=
=
2
2
Vorlesung Regelungstechnik Prof Pohl
14
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
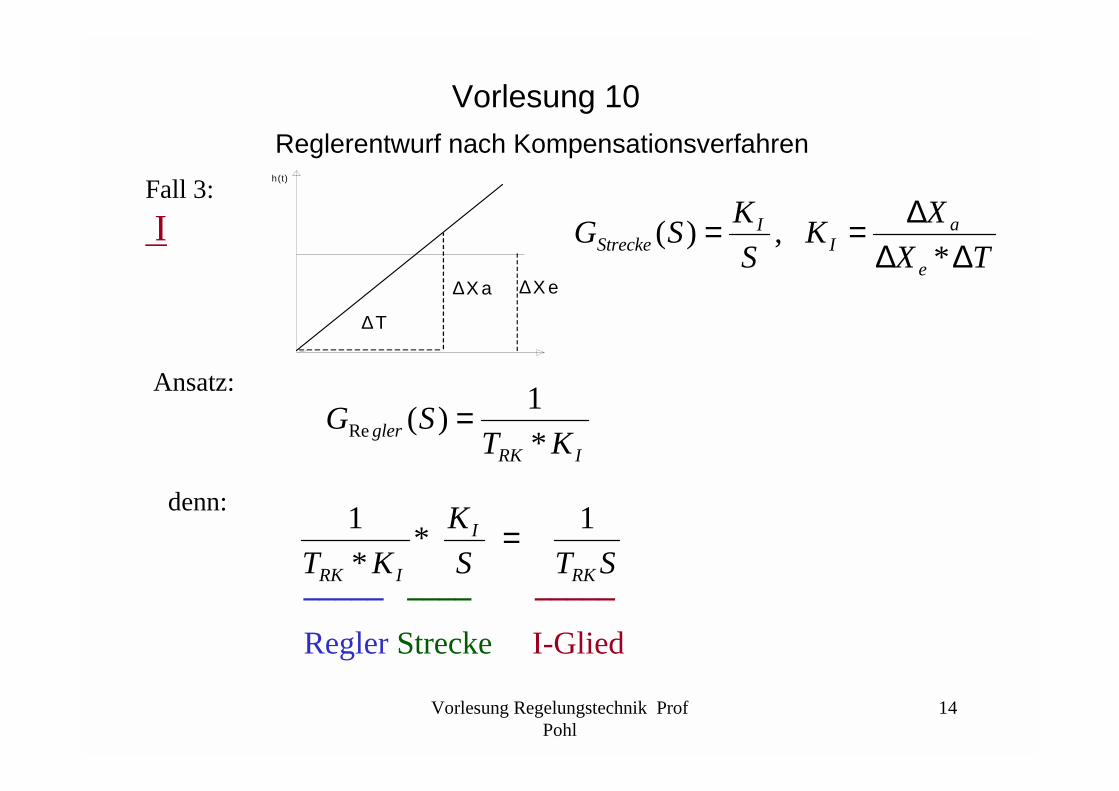
Fall 3:
I
∆T
h(t)
∆X a ∆X eTX
XK
S
KSG
e
aI
IStrecke ∆∆
∆==*
,)(
Ansatz:
IRKgler KT
SG*
1)(Re =
_____ ____ _____
Regler Strecke I-Glied
denn:
STS
K
KT RK
I
IRK
1*
*
1 =
Vorlesung Regelungstechnik Prof Pohl
15
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
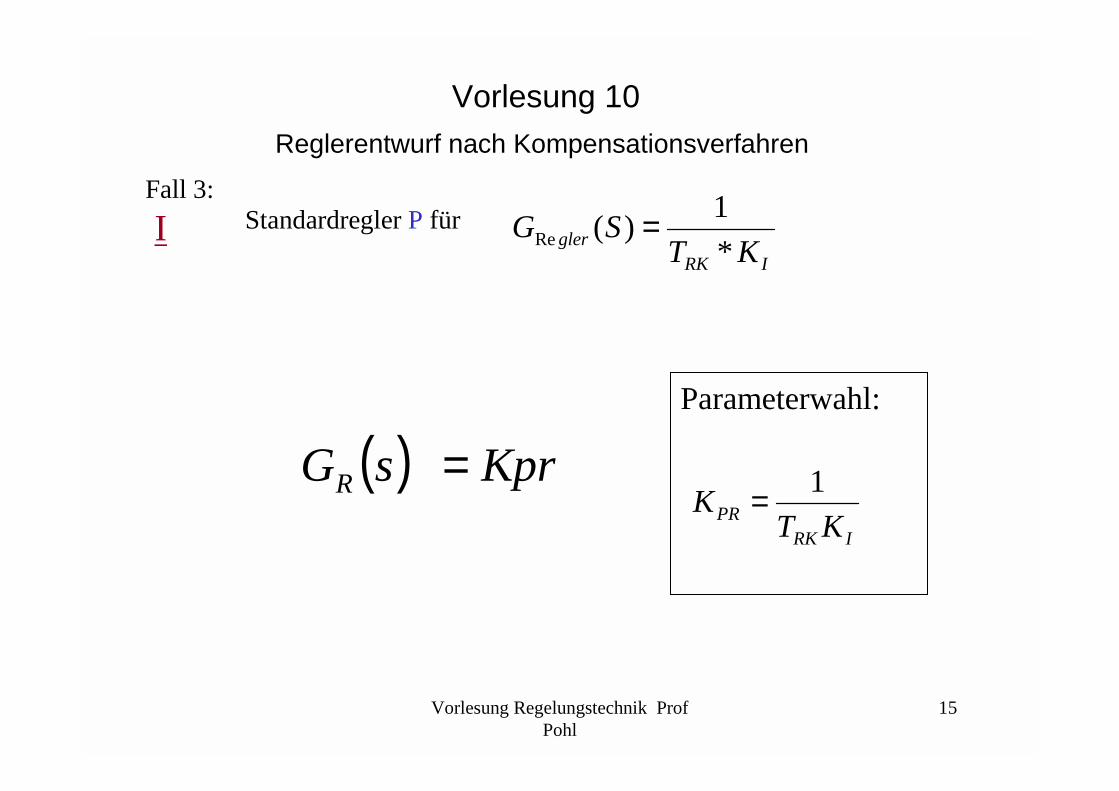
Fall 3:
IIRK
gler KTSG
*
1)(Re =Standardregler P für
( ) KprsGR =Parameterwahl:
IRKPR KT
K1=
Vorlesung Regelungstechnik Prof Pohl
16
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
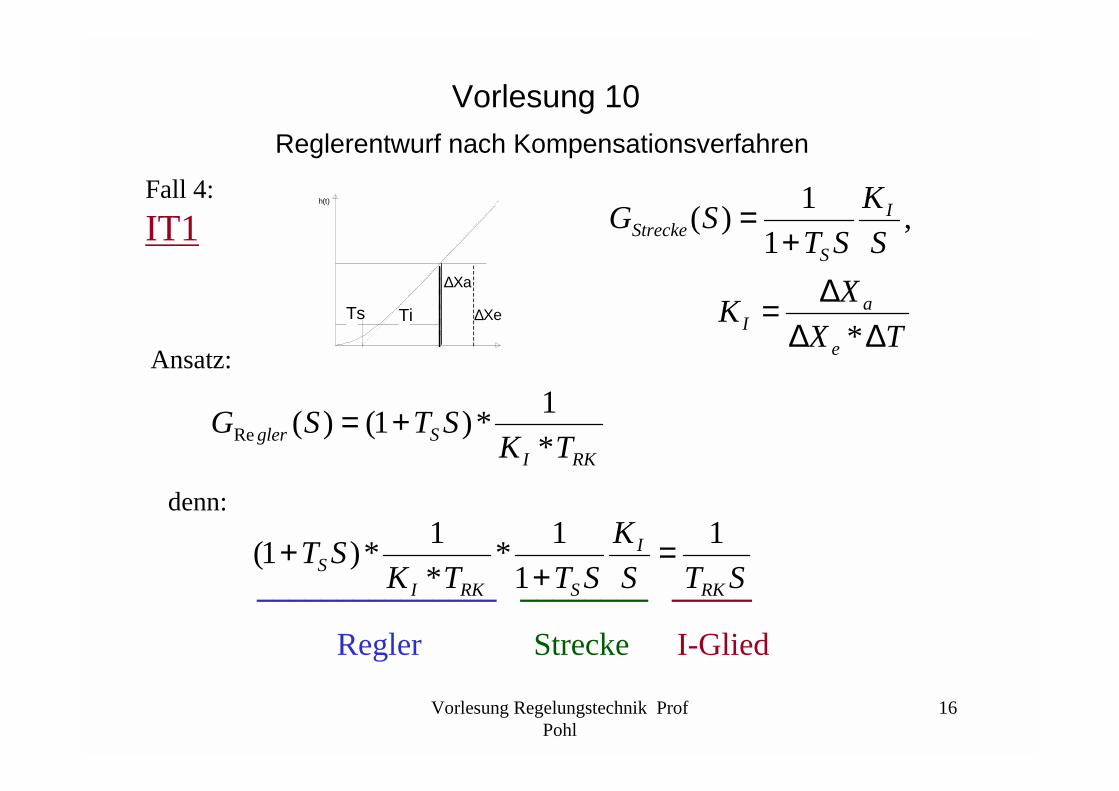
Fall 4:
IT1
RKISgler TKSTSG
*
1*)1()(Re +=
Ansatz:
∆Xa
TiTs
h(t)
∆Xe
TX
XK
S
K
STSG
e
aI
I
SStrecke
∆∆∆=
+=
*
,1
1)(
_______________ ________ _____
Regler Strecke I-Glied
denn:
STS
K
STTKST
RK
I
SRKIS
1
1
1*
*
1*)1( =
++
Vorlesung Regelungstechnik Prof Pohl
17
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
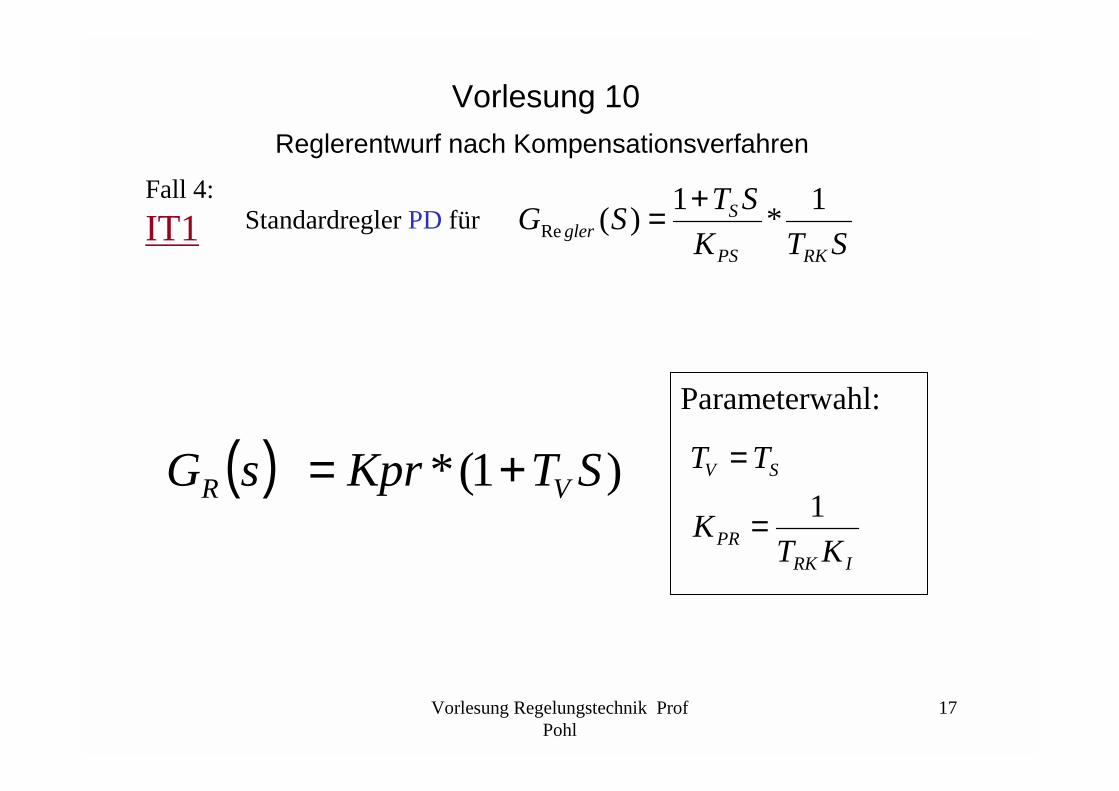
Fall 4:
IT1 STK
STSG
RKPS
Sgler
1*
1)(Re
+=Standardregler PD für
( ) )1(* STKprsG VR +=Parameterwahl:
IRKPR
SV
KTK
TT
1=
=
Vorlesung Regelungstechnik Prof Pohl
18
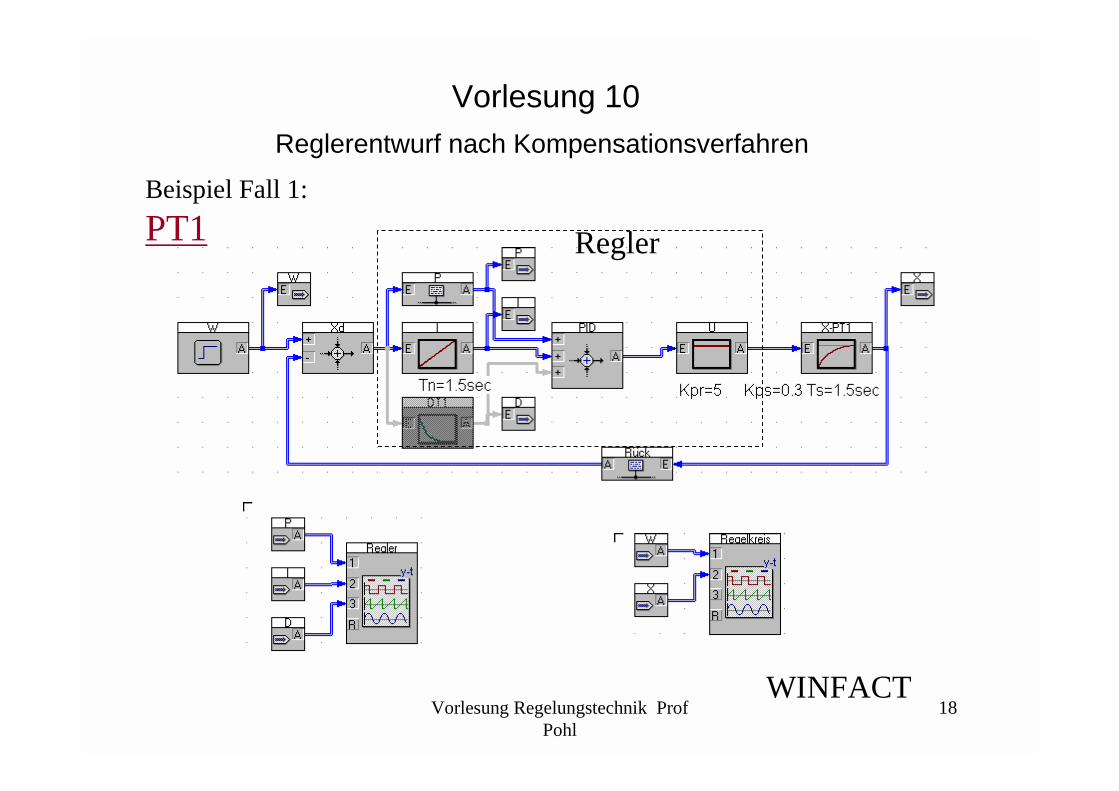
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
Beispiel Fall 1:
PT1 Regler
WINFACT
Vorlesung Regelungstechnik Prof Pohl
19
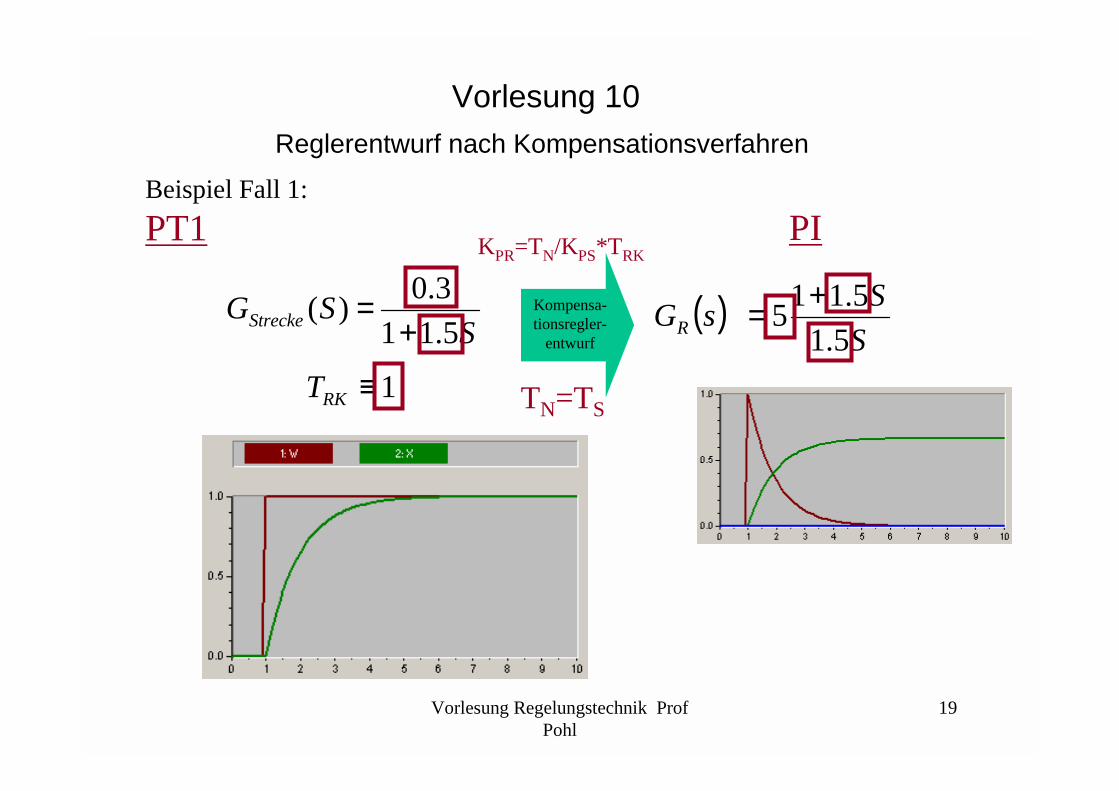
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
Beispiel Fall 1:
PT1
SSGStrecke 5.11
3.0)(
+= ( )
S
SsGR 5.1
5.115
+=Kompensa-tionsregler-
entwurf
TN=TS1≡RKT
KPR=TN/KPS*TRKPI
Vorlesung Regelungstechnik Prof Pohl
20
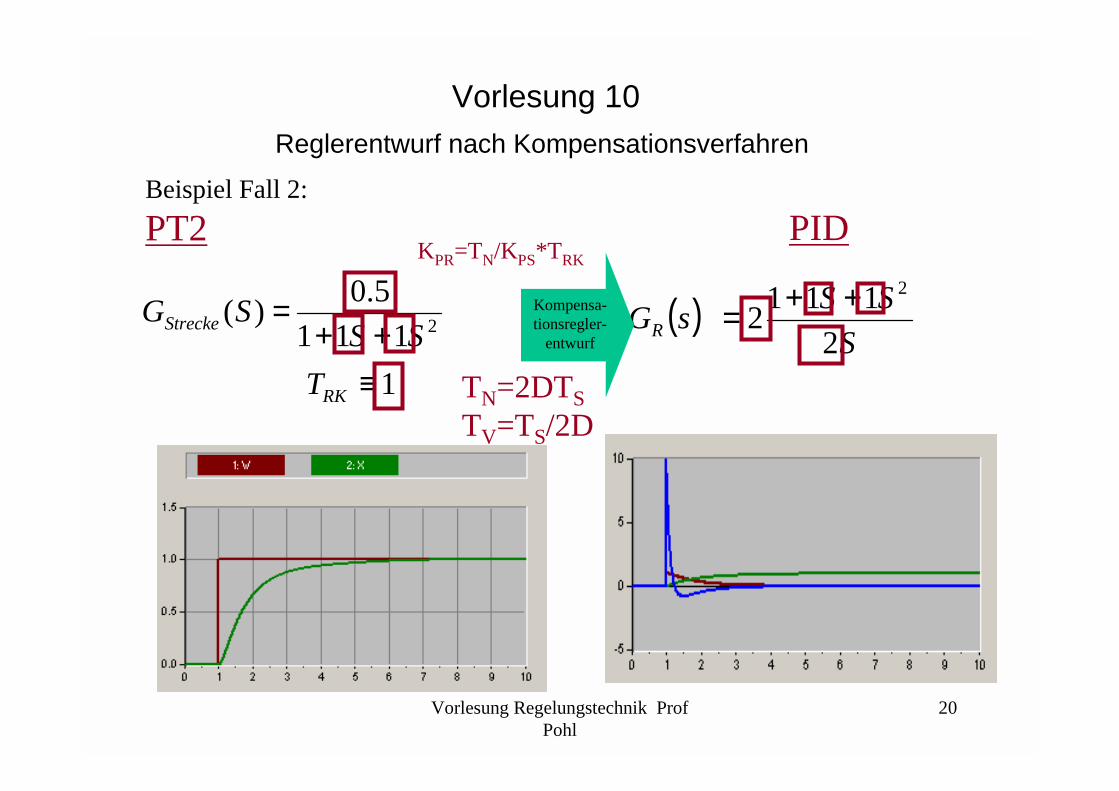
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
Beispiel Fall 2:
PT2
2111
5.0)(
SSSGStrecke ++
= ( )S
SSsGR 2
1112
2++=Kompensa-tionsregler-
entwurf
1≡RKT
KPR=TN/KPS*TRK
PID
TN=2DTS
TV=TS/2D
Vorlesung Regelungstechnik Prof Pohl
21
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
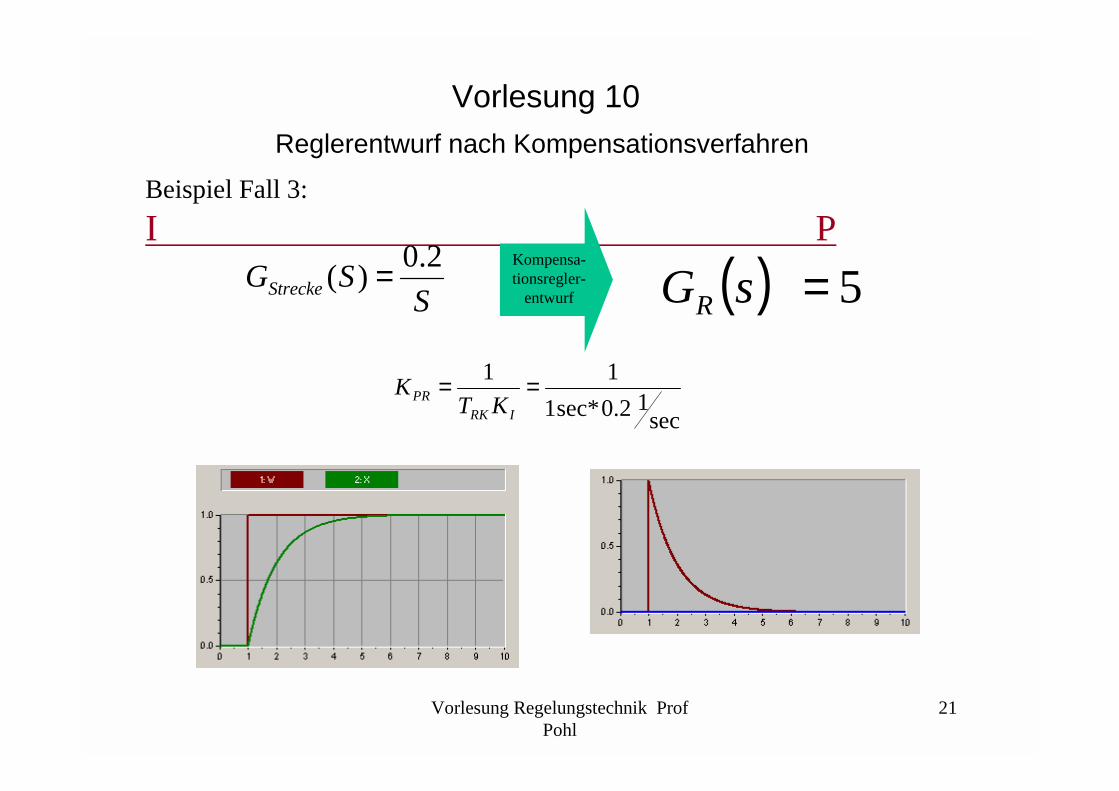
Beispiel Fall 3:
I P
( ) 5=sGR
Kompensa-tionsregler-
entwurfSSGStrecke
2.0)( =
sec12.0sec*1
11 ==IRK
PR KTK
Vorlesung Regelungstechnik Prof Pohl
22
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
Beispiel Fall 4:
IT1
siehe Beispiel Verladekran
Vorlesung Regelungstechnik Prof Pohl
23
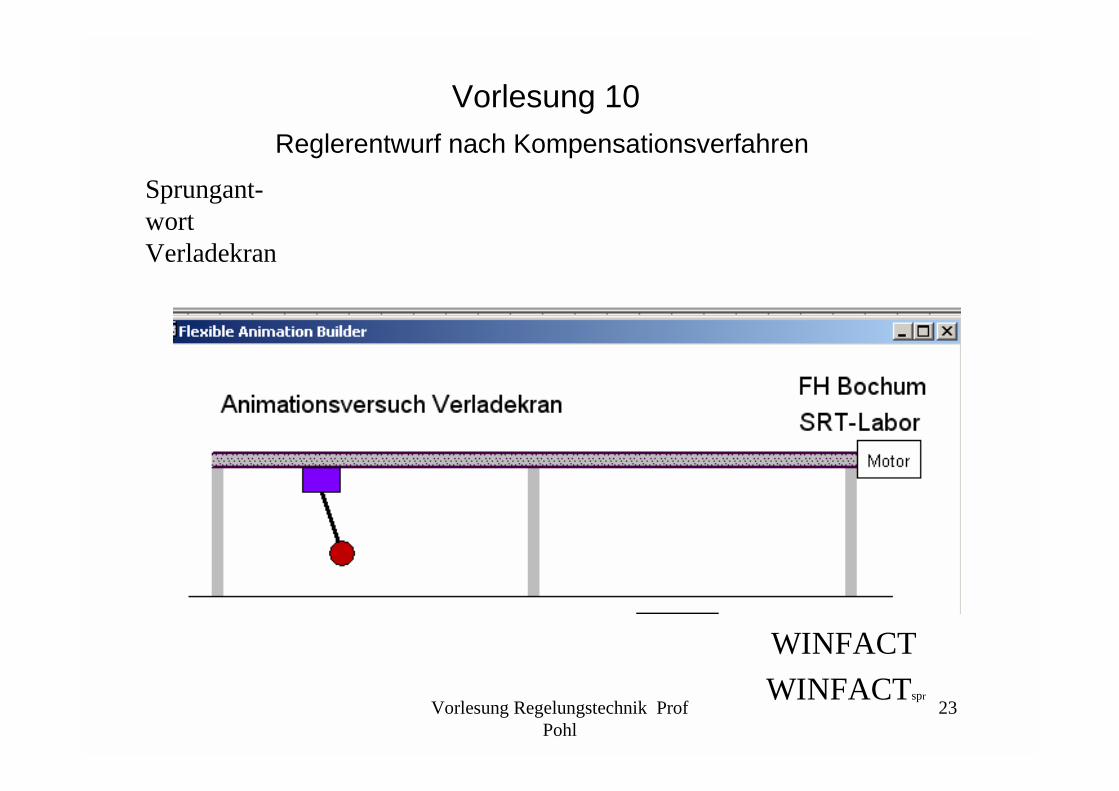
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
Sprungant-wortVerladekran
WINFACT
WINFACTspr

Vorlesung Regelungstechnik Prof Pohl
24
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
Sprungant-wortVerladekran
Auswertung:
TS=0.9sec
1*)1(
1)( PTI
STS
KSG
S
InVerladekra +
=
sec9.0;sec1
1133.1
0.1*95.1
21.2 =−=−= SI TK
Vorlesung Regelungstechnik Prof Pohl
25
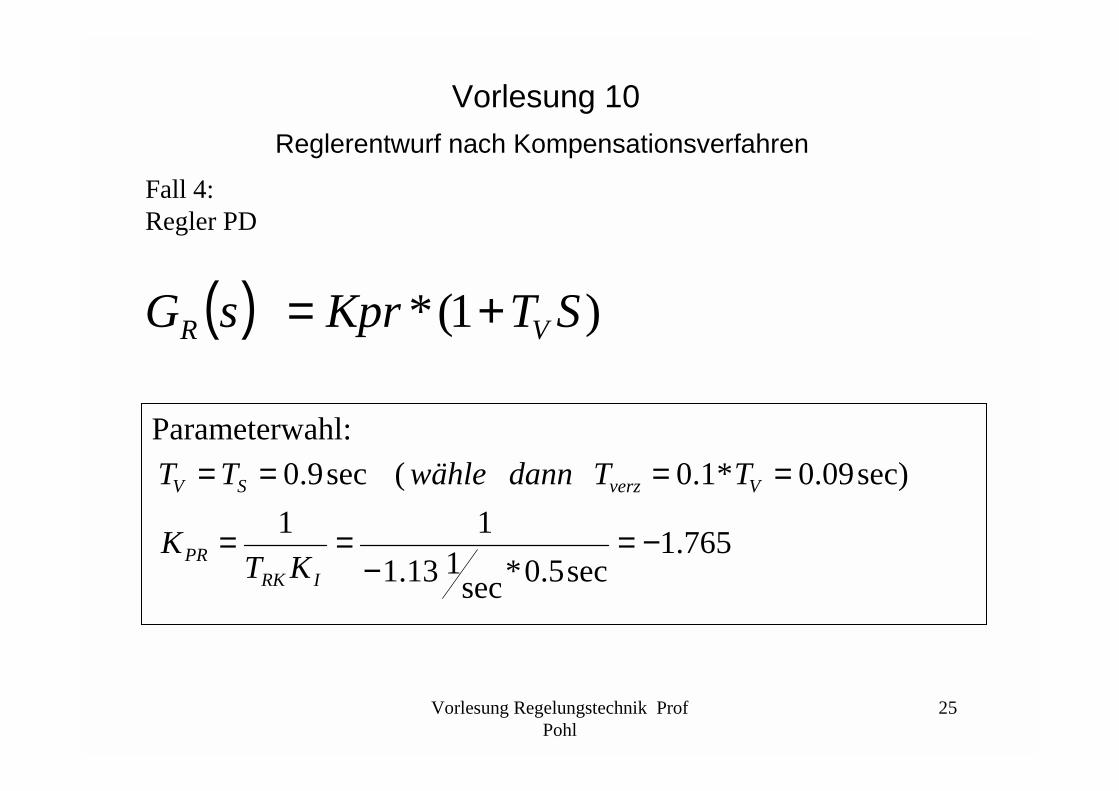
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
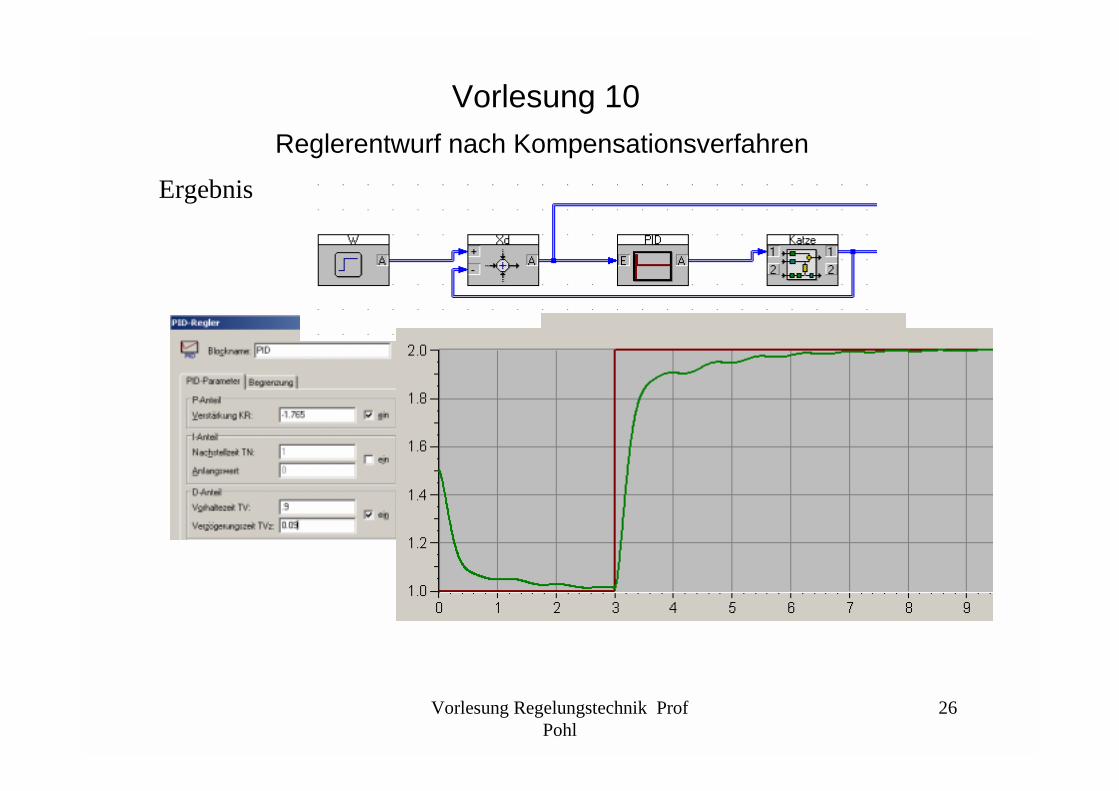
Fall 4:Regler PD
( ) )1(* STKprsG VR +=
Parameterwahl:
765.1sec5.0*sec
113.1
11
sec)09.0*1.0(sec9.0
−=−
==
====
IRKPR
VverzSV
KTK
TTdannwähleTT
Vorlesung Regelungstechnik Prof Pohl
26
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
Ergebnis
Vorlesung Regelungstechnik Prof Pohl
27
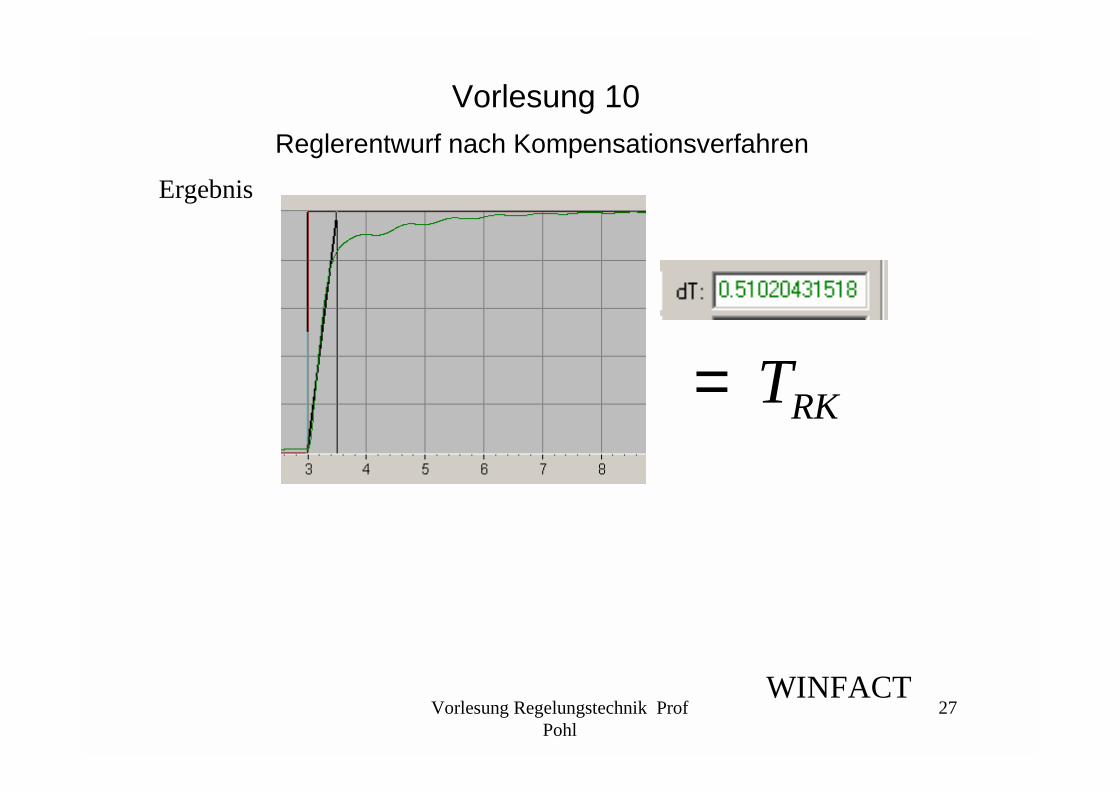
Vorlesung 10Reglerentwurf nach Kompensationsverfahren
Ergebnis
RKT=
WINFACT
Vorlesung Regelungstechnik Prof Pohl
28
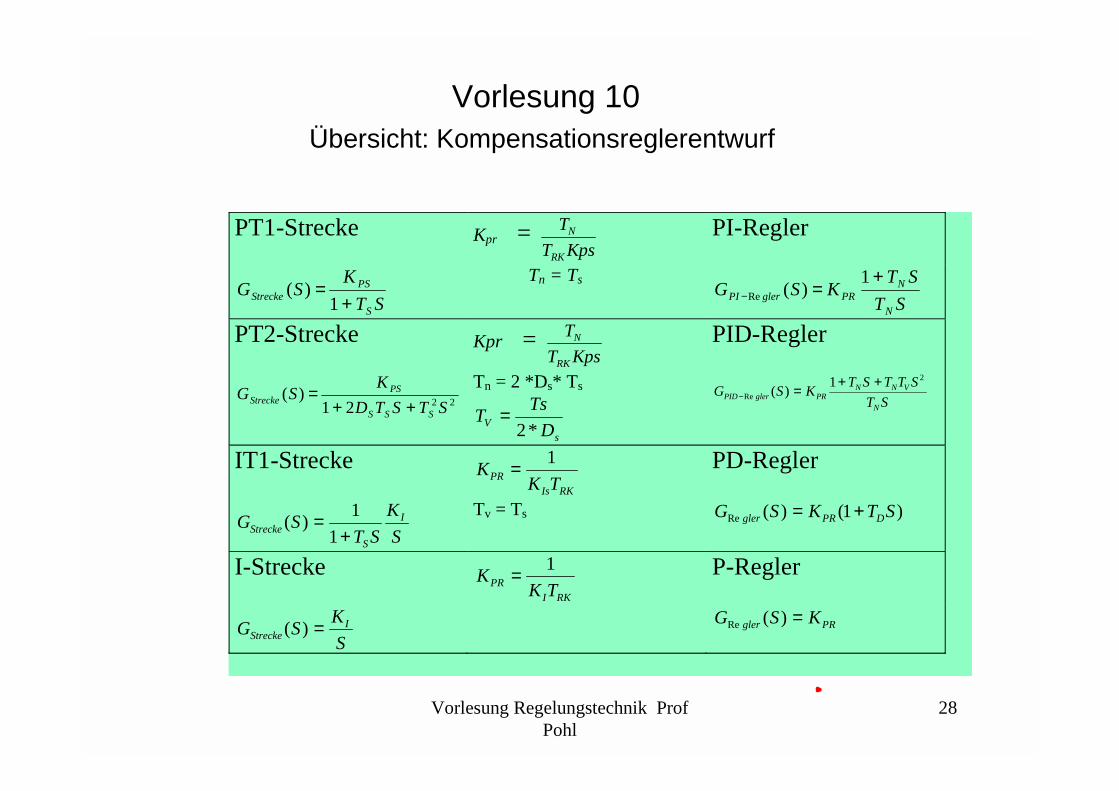
Vorlesung 10Übersicht: Kompensationsreglerentwurf
PT1-Strecke Kpr = KpsT
T
RK
N PI-Regler
ST
KSG
S
PSStrecke +
=1
)(
Tn = Ts
ST
STKSG
N
NPRglerPI
+=−
1)(Re
PT2-Strecke Kpr = KpsT
T
RK
N PID-Regler
2221)(
STSTD
KSG
SSS
PSStrecke ++
= Tn = 2 *Ds* Ts
sV D
TsT
*2=
ST
STTSTKSG
N
VNNPRglerPID
2
Re
1)(
++=−
IT1-Strecke RKIs
PR TKK
1= PD-Regler
S
K
STSG I
SStrecke +
=1
1)( Tv = Ts )1()(Re STKSG DPRgler +=
I-Strecke RKI
PR TKK
1= P-Regler
S
KSG I
Strecke =)( PRgler KSG =)(Re
Vorlesung Regelungstechnik Prof Pohl
29
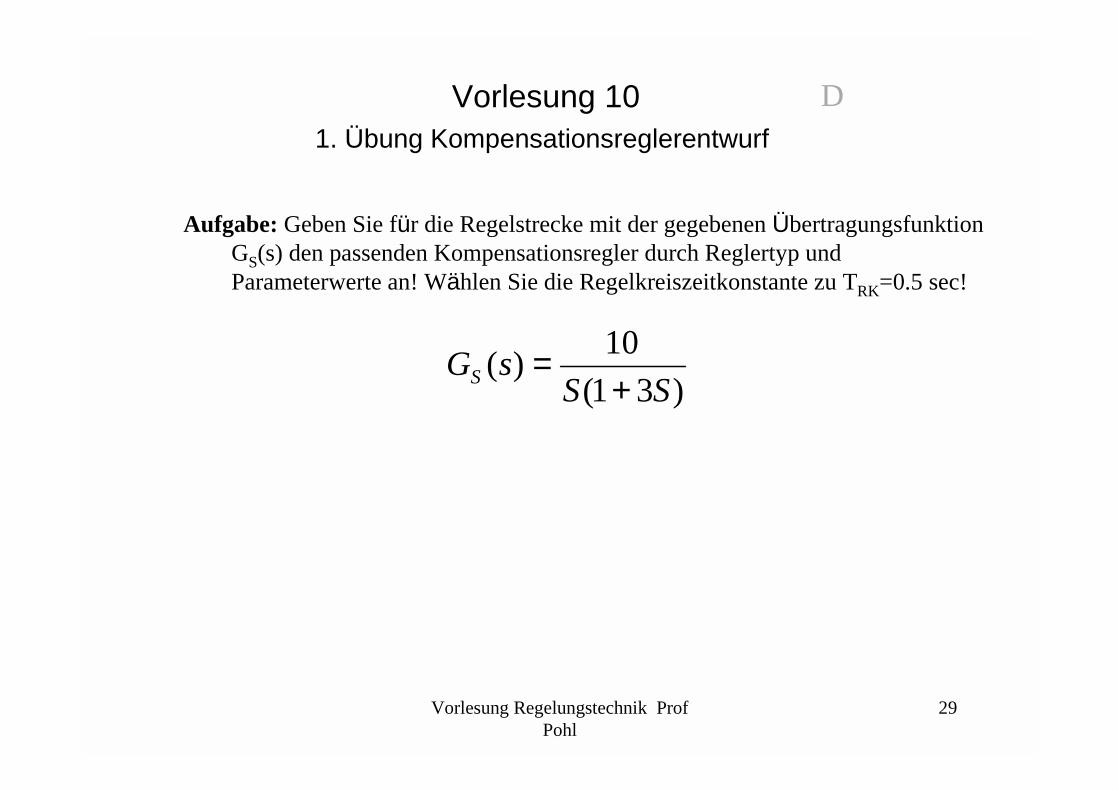
Vorlesung 101. Übung Kompensationsreglerentwurf
)31(
10)(
SSsGS +
=
Aufgabe: Geben Sie für die Regelstrecke mit der gegebenen Übertragungsfunktion GS(s) den passenden Kompensationsregler durch Reglertyp und Parameterwerte an! Wählen Sie die Regelkreiszeitkonstante zu TRK=0.5 sec!
D
Vorlesung Regelungstechnik Prof Pohl
30
Vorlesung 102. Übung Kompensationsreglerentwurf
Aufgabe: Gegeben sei ein IT1-System; die Zeitkonstante sei TS=4 sec und die Integralverstärkung sei KI =0.4 m/Vsec ! Geben Sie den passenden Kompensationsregler durch Reglertyp und Parameterwerte mit Einheiten an! Wählen Sie die Regelkreiszeitkonstante zu TRK=5 sec!
D
Vorlesung Regelungstechnik Prof Pohl
31
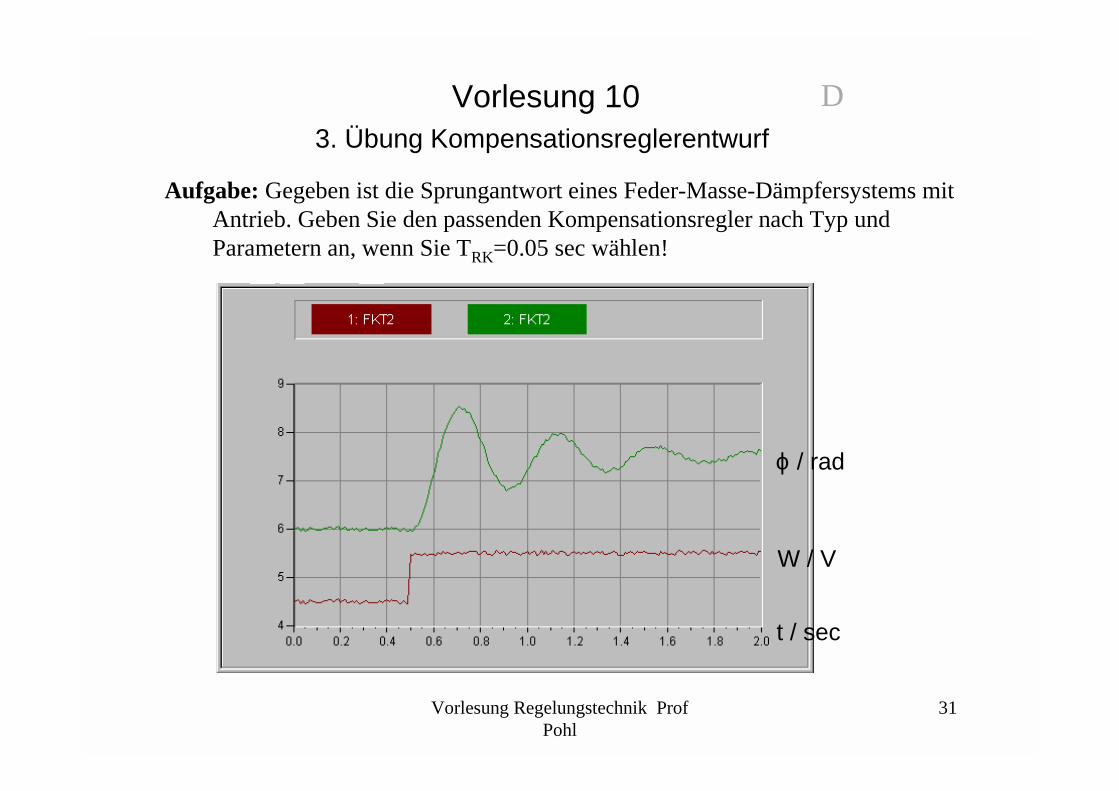
Vorlesung 103. Übung Kompensationsreglerentwurf
Aufgabe: Gegeben ist die Sprungantwort eines Feder-Masse-Dämpfersystems mit Antrieb. Geben Sie den passenden Kompensationsregler nach Typ und Parametern an, wenn Sie TRK=0.05 sec wählen!
ϕ / rad
W / V
t / sec
D