rock fracture dynamics and induced seismicity - arma€¦ · rock fracture dynamics and ... •...
TRANSCRIPT
1 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
ARMA Plenary Lecture, Chicago, USA June 25th, 2012
UNIVERSITY OF
TORONTO
Rock Fracture Dynamics and Induced Seismicity
Paul Young, Professor of Seismology and Rock Mechanics, University of Toronto, Canada.
Acknowledgements and THANKS to M.H.B (Farzine) Nasseri, Laszlo Lombos, Sebastian Goodfellow, Alex Schubnel, Juan Reynes-Montes, Xueping Zhao, my research group and colleagues (past and present), research partners and sponsors including UofT, Ergotech, MTS, ASC, Itasca, CFI, OIT, MRI, NSERC, MMT.
2 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
Overview • Induced Seismicity (Field)
Imaging the subsurface State of the art, challenges and opportunities
• Rock Fracture Dynamics and Induced Seismicity (Lab) Some previous research, standing on the shoulders of giants True-Triaxial lab experiments, induced seismicity and
geophysical imaging Seismicity, velocity and permeability
• Conclusions and Future Potential for Induced Seismicity
3 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
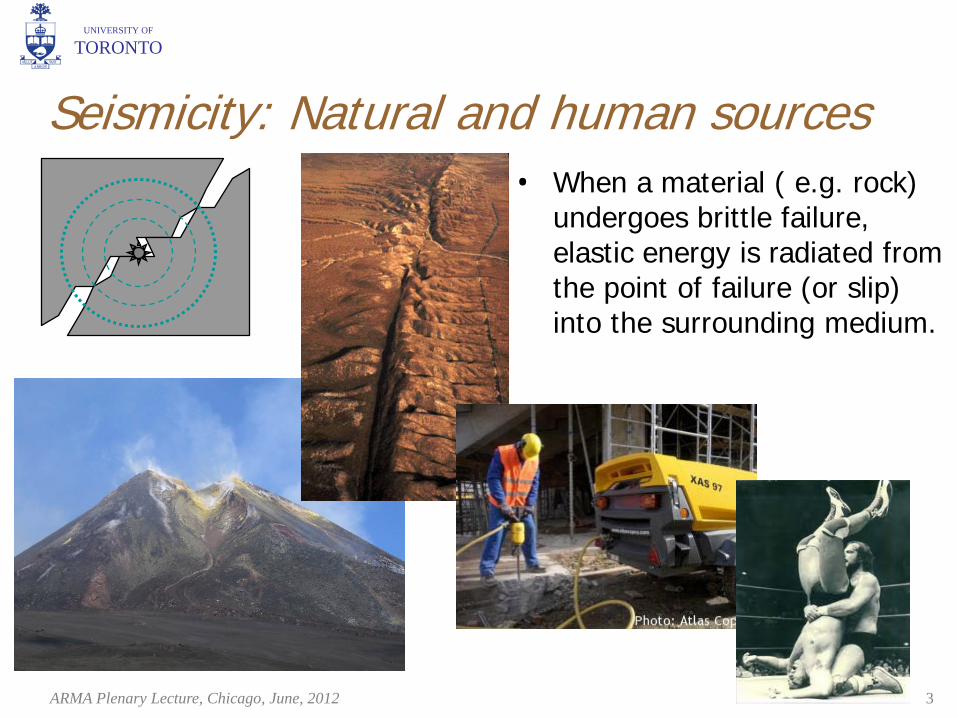
Seismicity: Natural and human sources • When a material ( e.g. rock)
undergoes brittle failure, elastic energy is radiated from the point of failure (or slip) into the surrounding medium.
4 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
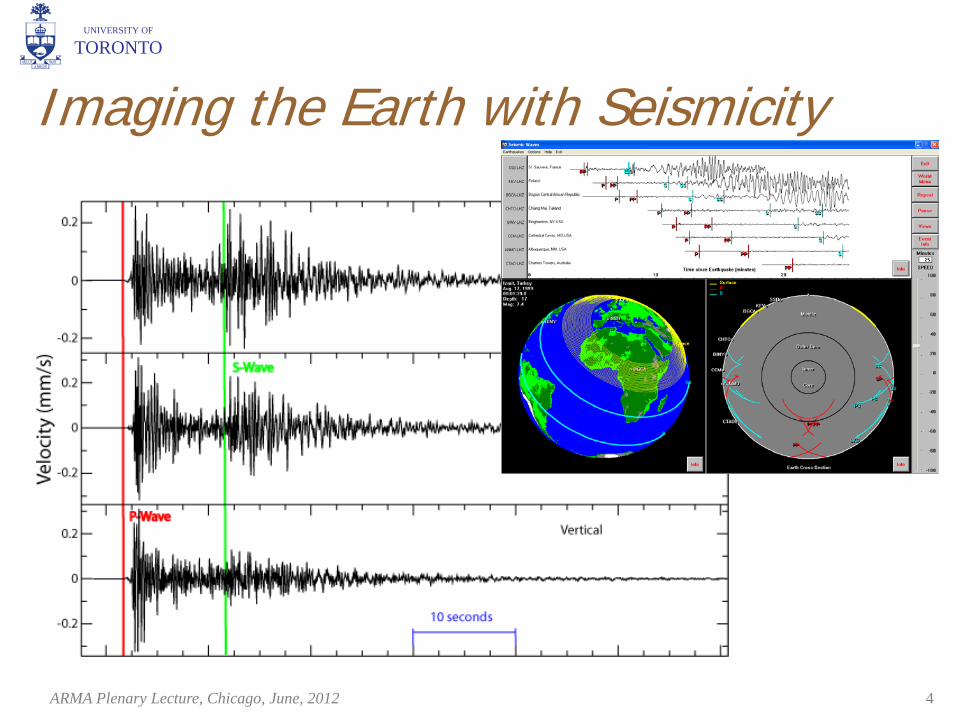
Imaging the Earth with Seismicity
5 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
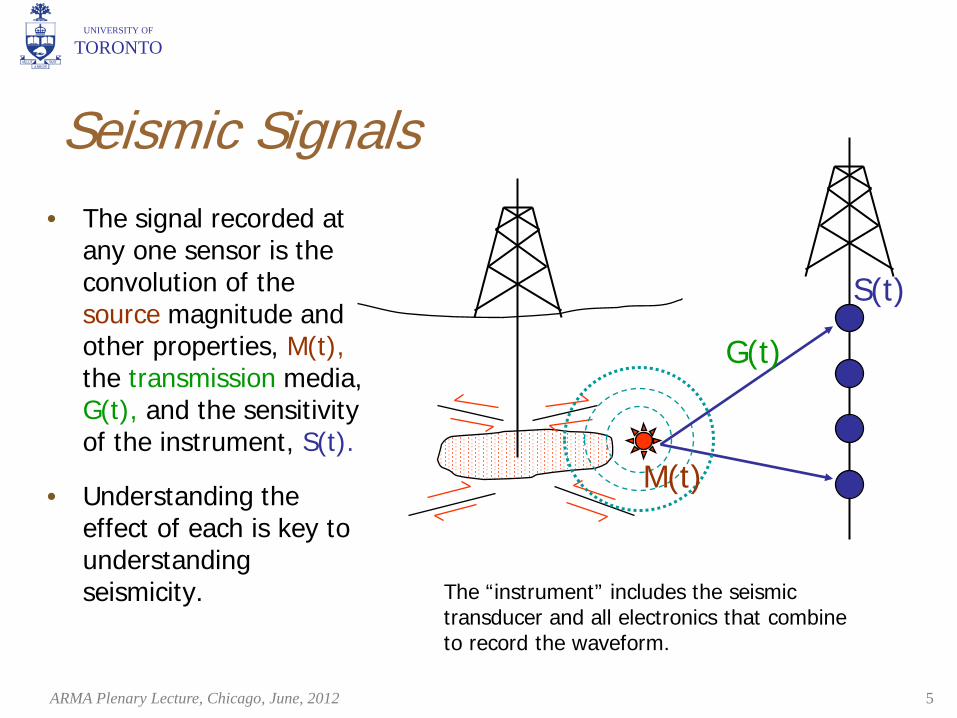
Seismic Signals • The signal recorded at
any one sensor is the convolution of the source magnitude and other properties, M(t), the transmission media, G(t), and the sensitivity of the instrument, S(t).
• Understanding the effect of each is key to understanding seismicity.
G(t)
M(t)
S(t)
The “instrument” includes the seismic transducer and all electronics that combine to record the waveform.
6 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
Induced or Triggered Seismicity • There are many examples where human activity causes
perturbations of the Earth’s crust that lead directly or indirectly to seismicity.
• Studies of such ‘stimulated’ seismicity provide important insights into the factors controlling crustal seismicity, both natural and ‘artificial’.
• Monitoring of stimulated seismicity can provide critical feedback on the engineering performance of a particular site or infrastructure.
• Induced Where the causative activity can account for most of the stress change or
energy required to produce the seismicity • Triggered
Where the causative activity accounts for only a fraction of the stress change or energy associated with the seismicity (i.e. tectonic loading plays a primary role)
(after McGarr & Simpson, 1997
7 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
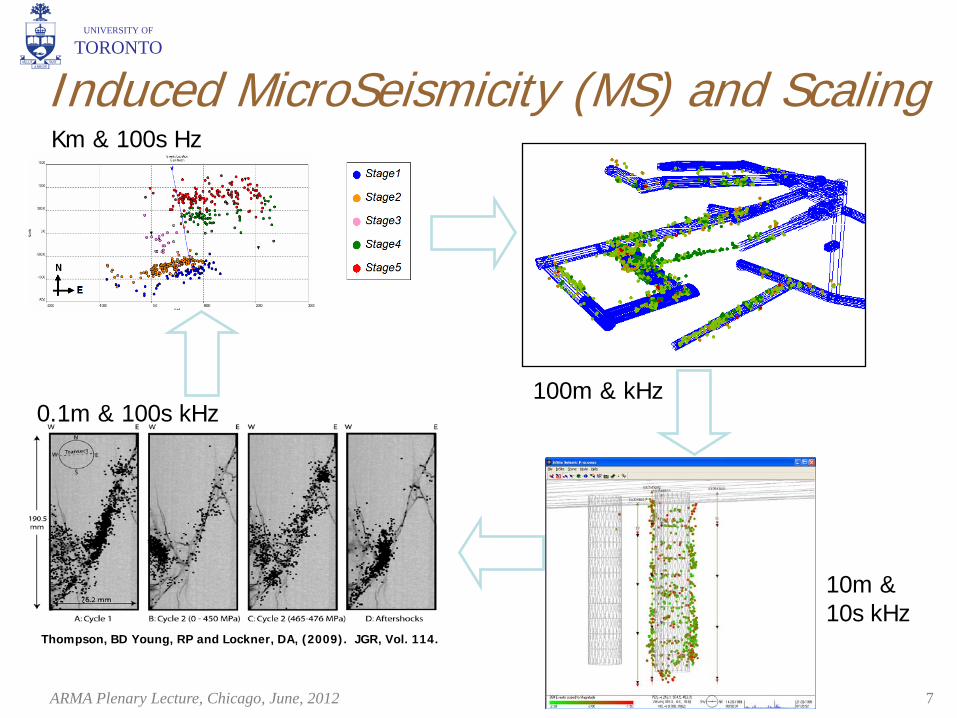
Induced MicroSeismicity (MS) and Scaling
Thompson, BD Young, RP and Lockner, DA, (2009). JGR, Vol. 114.
Km & 100s Hz
100m & kHz
10m & 10s kHz
0.1m & 100s kHz
8 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
UP
W
S
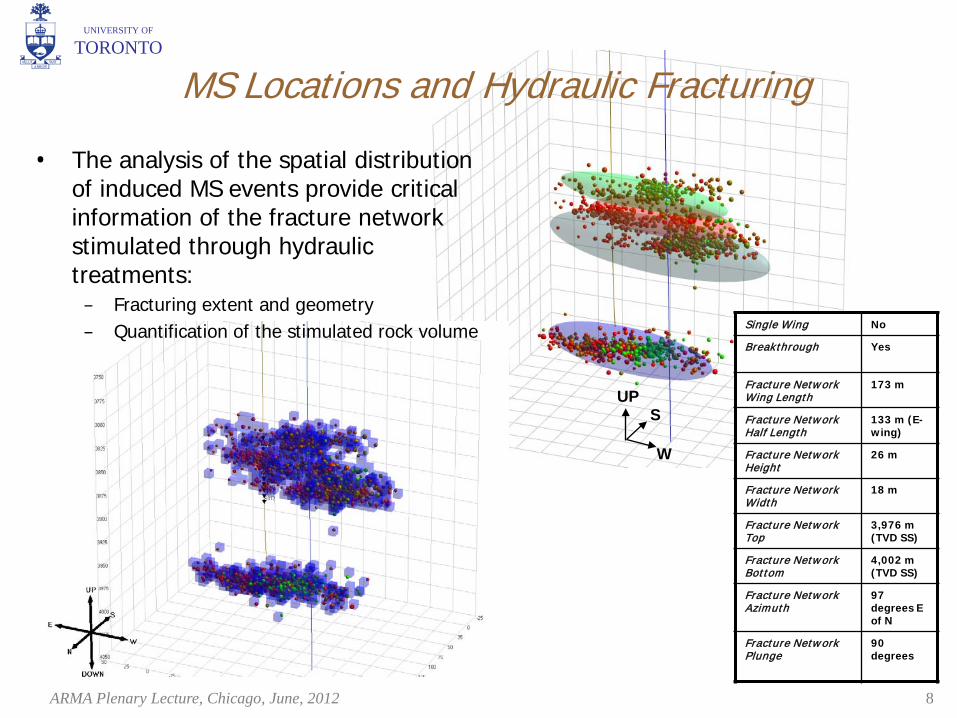
• The analysis of the spatial distribution of induced MS events provide critical information of the fracture network stimulated through hydraulic treatments:
– Fracturing extent and geometry – Quantification of the stimulated rock volume Single Wing No
Breakthrough Yes
Fracture Network Wing Length
173 m
Fracture Network Half Length
133 m (E-wing)
Fracture Network Height
26 m
Fracture Network Width
18 m
Fracture Network Top
3,976 m (TVD SS)
Fracture Network Bottom
4,002 m (TVD SS)
Fracture Network Azimuth
97 degrees E of N
Fracture Network P lunge
90 degrees
MS Locations and Hydraulic Fracturing
9 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
Challenges and Opportunities
• S-wave Location Methods • Relative Location • Source Mechanisms • Analysis of the Continuous Data Streams • Enhanced Velocity Models • Synthetic Seismicity Modelling
10 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
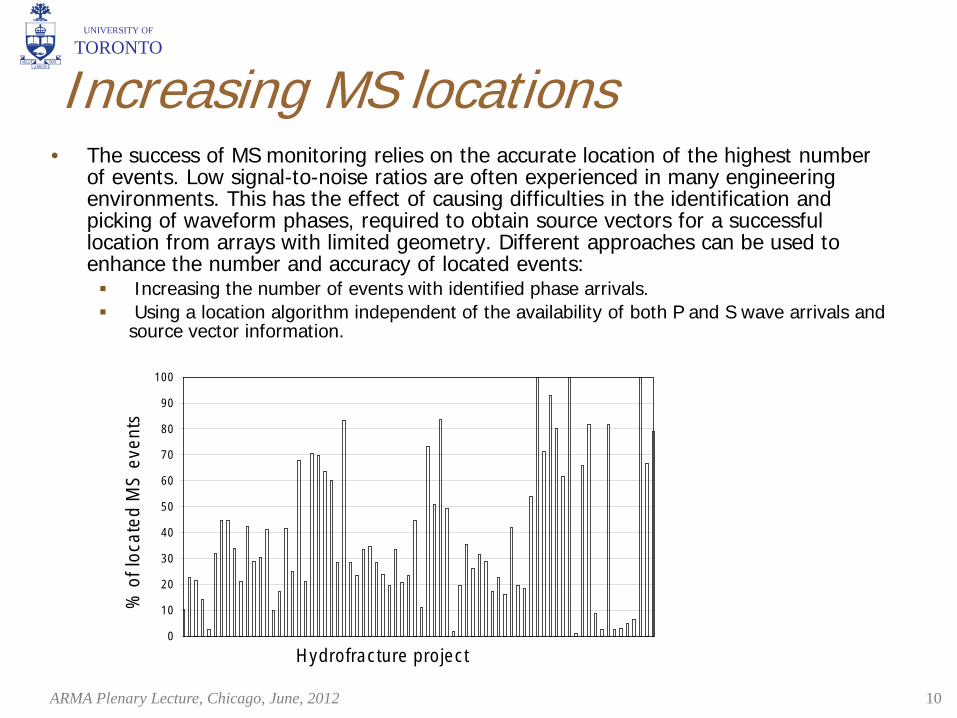
Increasing MS locations • The success of MS monitoring relies on the accurate location of the highest number
of events. Low signal-to-noise ratios are often experienced in many engineering environments. This has the effect of causing difficulties in the identification and picking of waveform phases, required to obtain source vectors for a successful location from arrays with limited geometry. Different approaches can be used to enhance the number and accuracy of located events: Increasing the number of events with identified phase arrivals. Using a location algorithm independent of the availability of both P and S wave arrivals and
source vector information.
0
10
20
30
40
50
60
70
80
90
100
H ydro fractu re p ro ject
% o
f loc
ated
MS
even
ts
11 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
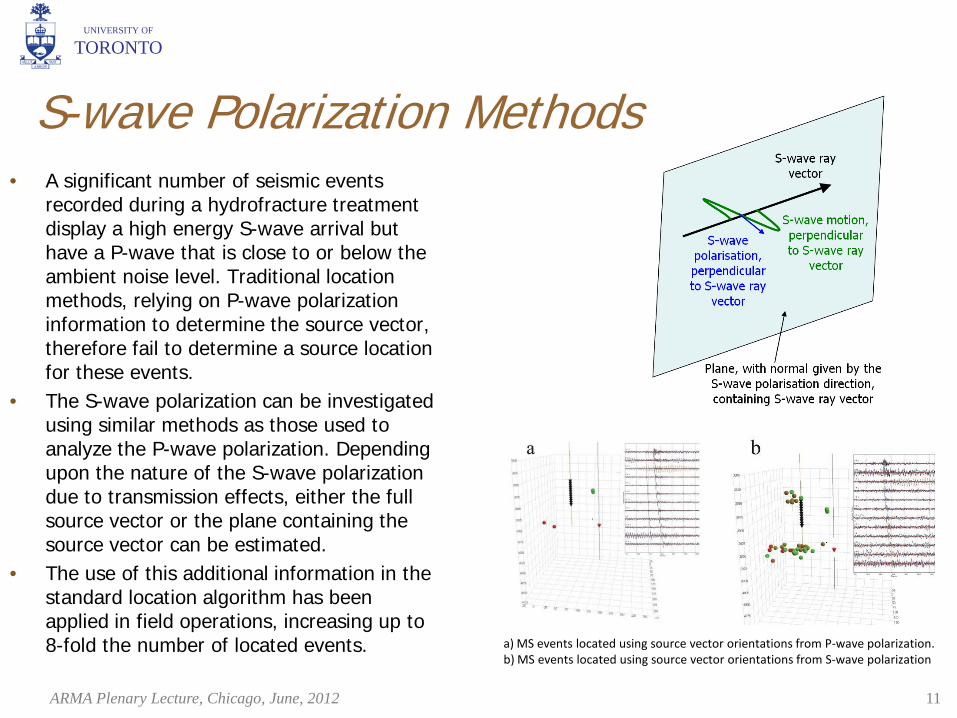
S-wave Polarization Methods • A significant number of seismic events
recorded during a hydrofracture treatment display a high energy S-wave arrival but have a P-wave that is close to or below the ambient noise level. Traditional location methods, relying on P-wave polarization information to determine the source vector, therefore fail to determine a source location for these events.
• The S-wave polarization can be investigated using similar methods as those used to analyze the P-wave polarization. Depending upon the nature of the S-wave polarization due to transmission effects, either the full source vector or the plane containing the source vector can be estimated.
• The use of this additional information in the standard location algorithm has been applied in field operations, increasing up to 8-fold the number of located events. a) MS events located using source vector orientations from P-wave polarization.
b) MS events located using source vector orientations from S-wave polarization
12 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
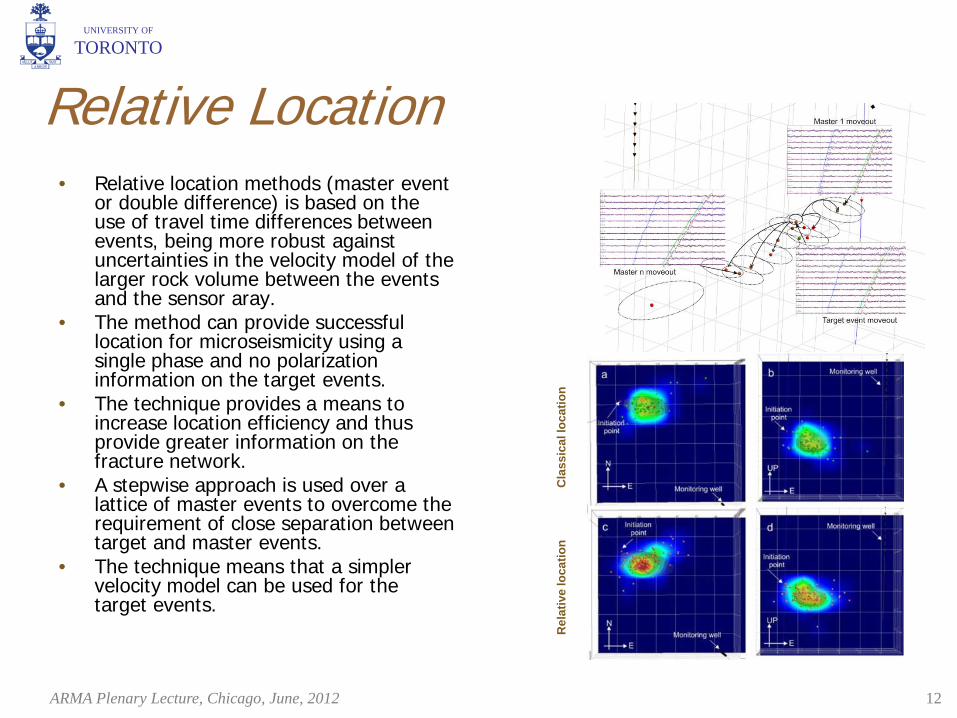
Relative Location • Relative location methods (master event
or double difference) is based on the use of travel time differences between events, being more robust against uncertainties in the velocity model of the larger rock volume between the events and the sensor aray.
• The method can provide successful location for microseismicity using a single phase and no polarization information on the target events.
• The technique provides a means to increase location efficiency and thus provide greater information on the fracture network.
• A stepwise approach is used over a lattice of master events to overcome the requirement of close separation between target and master events.
• The technique means that a simpler velocity model can be used for the target events.
Cla
ssic
al lo
catio
n R
elat
ive
loca
tion
13 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
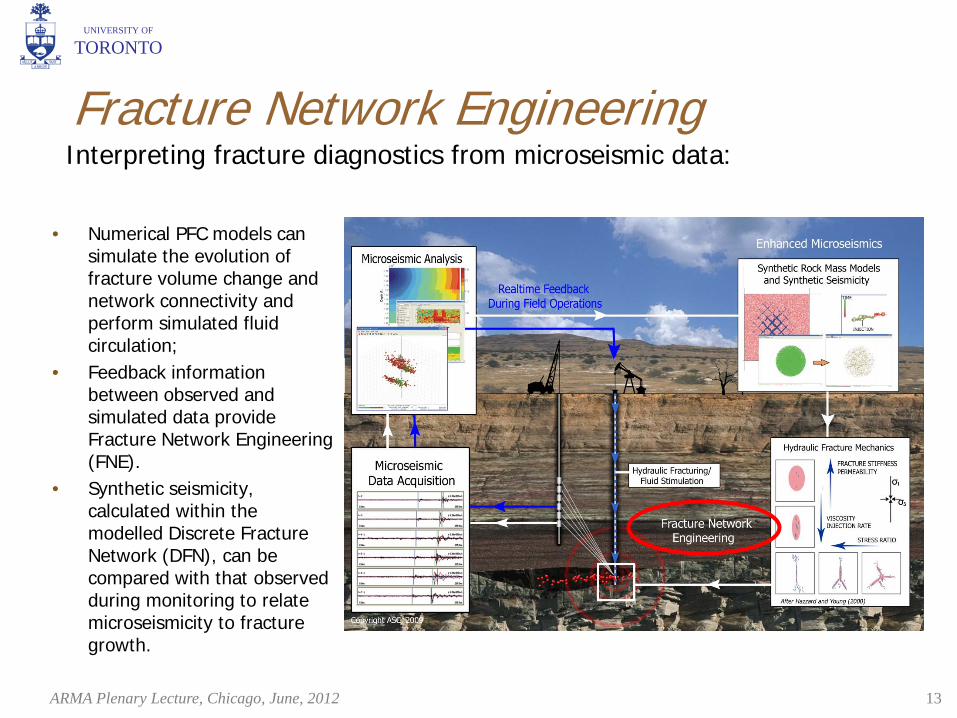
Fracture Network Engineering
• Numerical PFC models can simulate the evolution of fracture volume change and network connectivity and perform simulated fluid circulation;
• Feedback information between observed and simulated data provide Fracture Network Engineering (FNE).
• Synthetic seismicity, calculated within the modelled Discrete Fracture Network (DFN), can be compared with that observed during monitoring to relate microseismicity to fracture growth.
Interpreting fracture diagnostics from microseismic data:
14 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
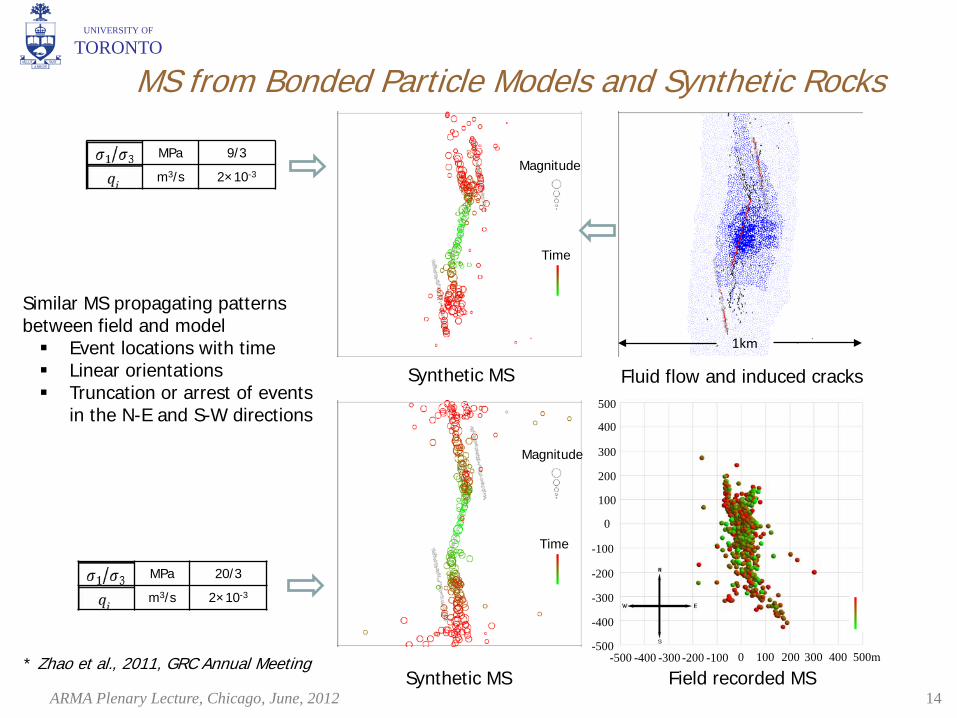
MPa 9/3
m3/s 2×10-3
Synthetic MS Fluid flow and induced cracks
Field recorded MS
Magnitude
Time
Magnitude
Time
Synthetic MS 100 200 300 400 0 -100 -200 -300 -400
-500
-400
-300
-200
-100
0
100
200
300
400
500
-500 500m
Similar MS propagating patterns between field and model Event locations with time Linear orientations Truncation or arrest of events
in the N-E and S-W directions
MS from Bonded Particle Models and Synthetic Rocks
MPa 20/3
m3/s 2×10-3
1km
* Zhao et al., 2011, GRC Annual Meeting
15 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
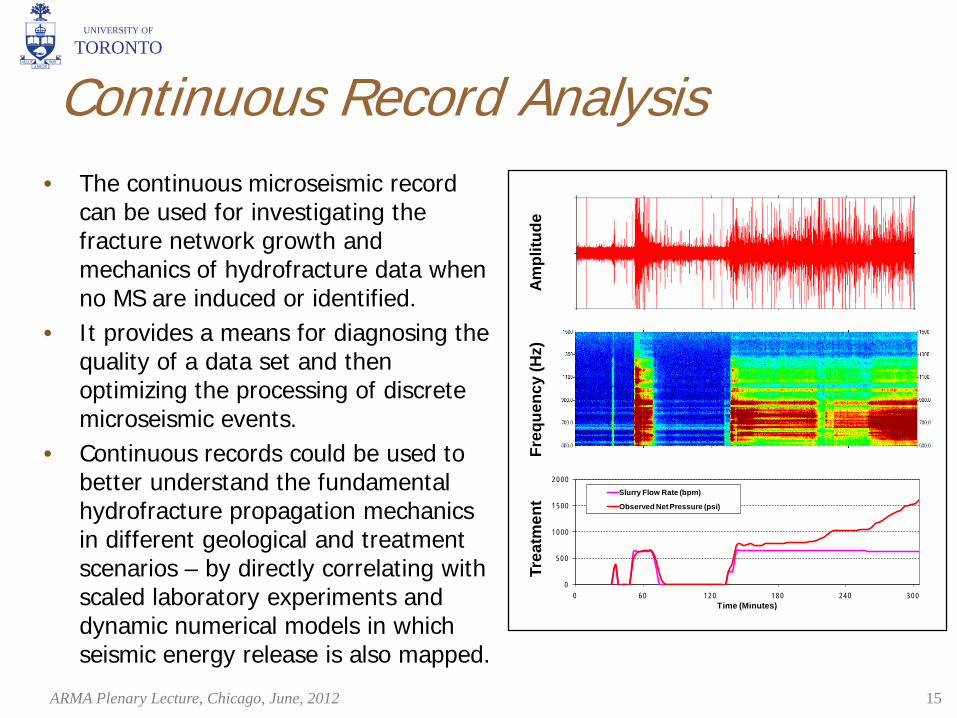
Continuous Record Analysis • The continuous microseismic record
can be used for investigating the fracture network growth and mechanics of hydrofracture data when no MS are induced or identified.
• It provides a means for diagnosing the quality of a data set and then optimizing the processing of discrete microseismic events.
• Continuous records could be used to better understand the fundamental hydrofracture propagation mechanics in different geological and treatment scenarios – by directly correlating with scaled laboratory experiments and dynamic numerical models in which seismic energy release is also mapped.
0
5 0 0
1 0 0 0
1 5 0 0
2 0 0 0
0 6 0 1 2 0 1 8 0 2 4 0 3 0 0
Time (Minutes)
Slurry Flow Rate (bpm)
Observed Net Pressure (psi)
Freq
uenc
y (H
z)
Ampl
itude
Tr
eatm
ent
16 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
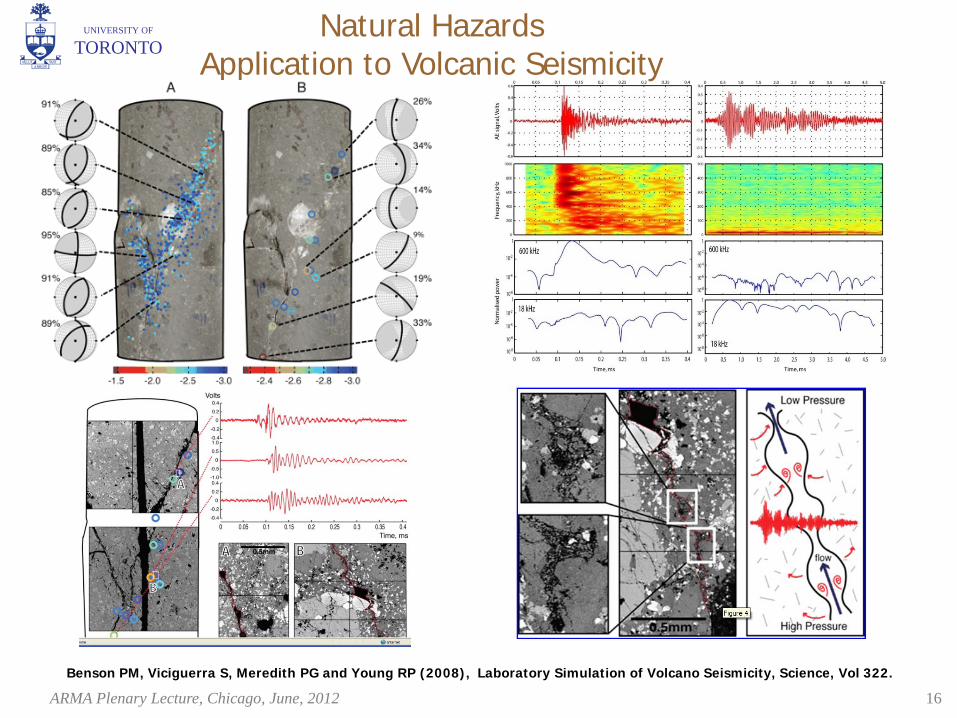
TORONTO Natural Hazards
Application to Volcanic Seismicity
Benson PM, Viciguerra S, Meredith PG and Young RP (2008), Laboratory Simulation of Volcano Seismicity, Science, Vol 322.
17 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
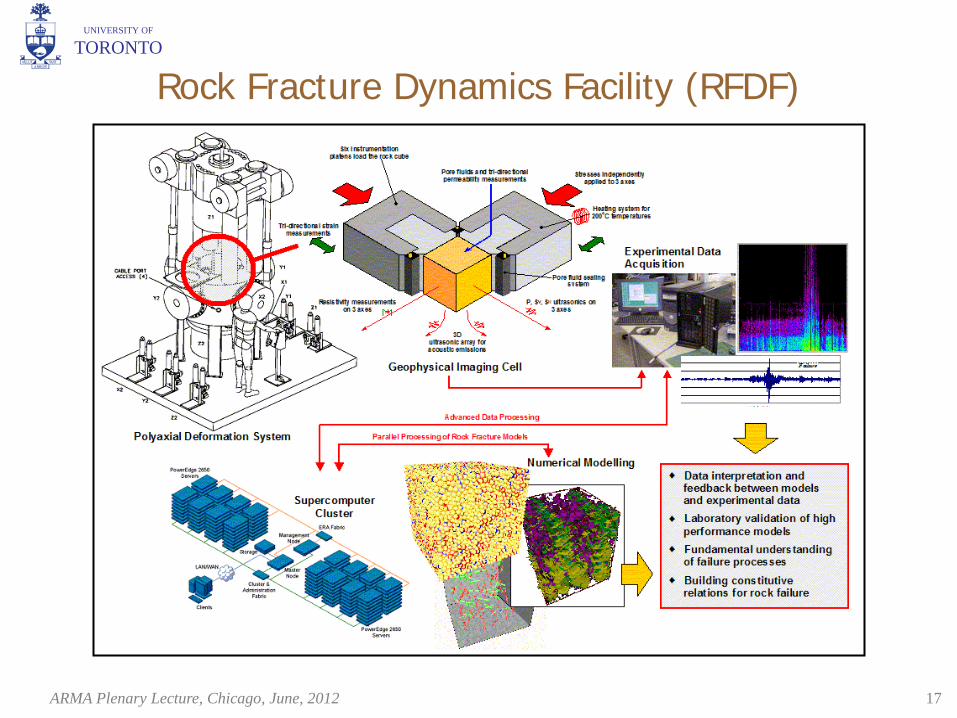
Rock Fracture Dynamics Facility (RFDF)
18 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
18
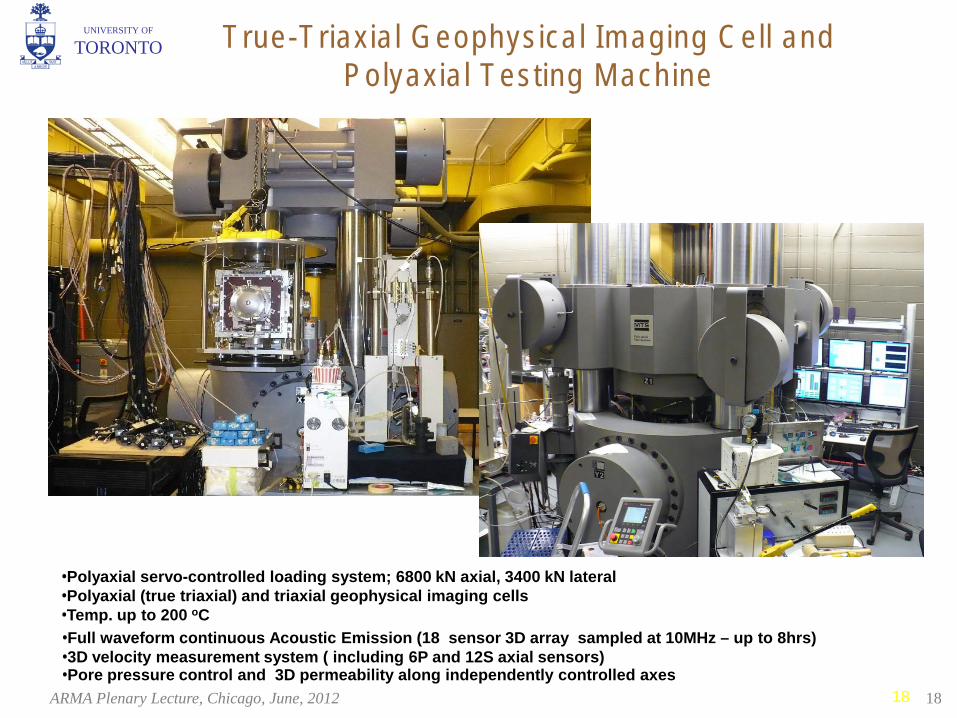
True-T riax ia l G eophysica l Im ag ing C e ll and P o lyax ia l Testing M ach ine
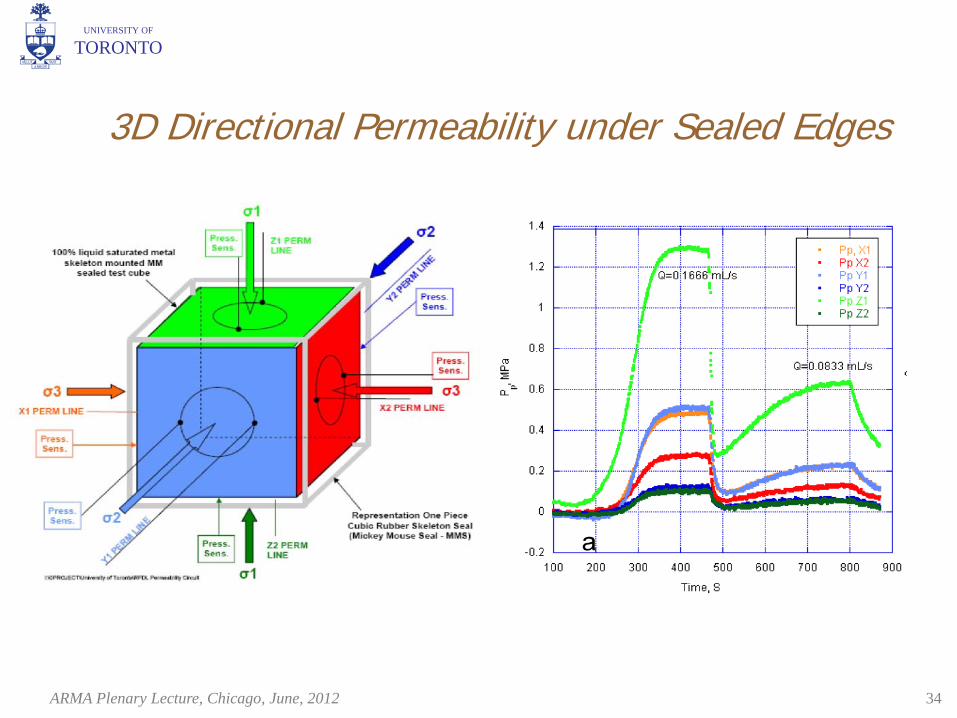
•Polyaxial servo-controlled loading system; 6800 kN axial, 3400 kN lateral •Polyaxial (true triaxial) and triaxial geophysical imaging cells •Temp. up to 200 oC •Full waveform continuous Acoustic Emission (18 sensor 3D array sampled at 10MHz – up to 8hrs) •3D velocity measurement system ( including 6P and 12S axial sensors) •Pore pressure control and 3D permeability along independently controlled axes
19 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
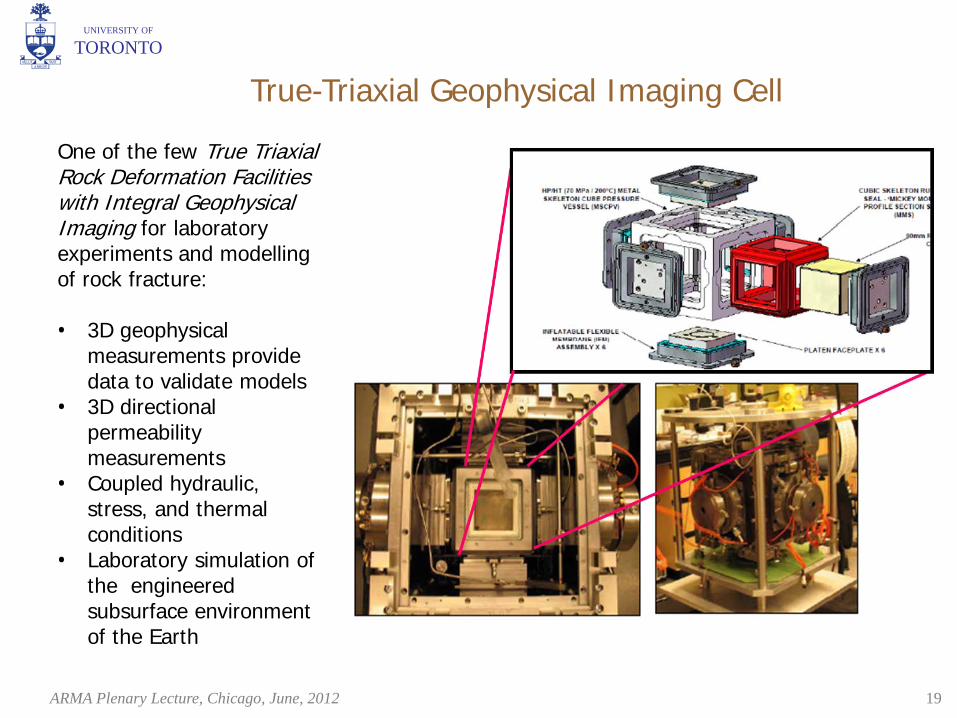
True-Triaxial Geophysical Imaging Cell
True Triaxial Geophysical Imaging
cell
One of the few True Triaxial Rock Deformation Facilities with Integral Geophysical Imaging for laboratory experiments and modelling of rock fracture: • 3D geophysical
measurements provide data to validate models
• 3D directional permeability measurements
• Coupled hydraulic, stress, and thermal conditions
• Laboratory simulation of the engineered subsurface environment of the Earth
20 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
Mogi, K. (1966). Some precise measurements of fracture strength of rocks under uniform compressive strength, Rock Mech. Engin. Geology 4, 51-55 Mogi, K. (1971). Fracture and flow of rocks under high triaxial compression, J. Geophys. Res. 76, 1255-1269. Takahashi, M and Koide, H. (1989). Effect of intermediate principal stress on strength and deformation behaviour of sedimentary rocks at the depth shallower than 2000 m. In Rock at Great Depth (eds. V. Maury and D, fourmaintraux) (Balkema, Rotterdam), PP.19-26 Haimson, B. and Chang, C. (2000). A new true triaxial cell for testing mechanical properties of rocks, and its use to determine rock strength and deformability of Westerly granite, Int. J. Mech. Min. Sci.37, 285-296. King, M.S. (2002). Elastic wave propagation in and permeability for rocks with multiple parallel fractures. IJRMMS 39: 1033-1043. Haimson, B. (2006). True triaxial stresses and the brittle fracture of rock. Pure and Applied Geophysics, 163: 1101-1130. MQ, Y. (2009). True-triaxial strength criteria for rock. IJRMMS, 46, PP. 115-127. King, M.S., Pettitt, W.S., Haycox, J.R. & Young, R.P. (2011). Acoustic emission associated with the formation of fracture sets in sandstone under polyaxial stress conditions. Geophysical Prospecting. doi:10.111/j.1365-2478.2011.00959.x Young, R.P., Nasseri, M.H.B. and Lombos, L. (2012). Imaging the Effect of the Intermediate Principal Stress on Strength, Deformation and Transport Properties of Rocks Using Seismic Methods. In True Triaxial Testing of Rocks. Ed. Marek Kwasniewski , Xiaochun Li, Manabu Takahashi. CRC Press.
S om e C ita tions fo r T rue-T riax ia l E xperim ents
21 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
Research Objectives of Current Study 1. Effect of intermediate stress on seismic and transport
properties of rocks (here some results for Fontainebleau Sandstone)
2. Evolution of velocity and acoustic emission for imaging fracture growth within a true triaxial system
3. Permeability measurements along three independent orthogonal axes and application of effective medium theory and numerical methods
22 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
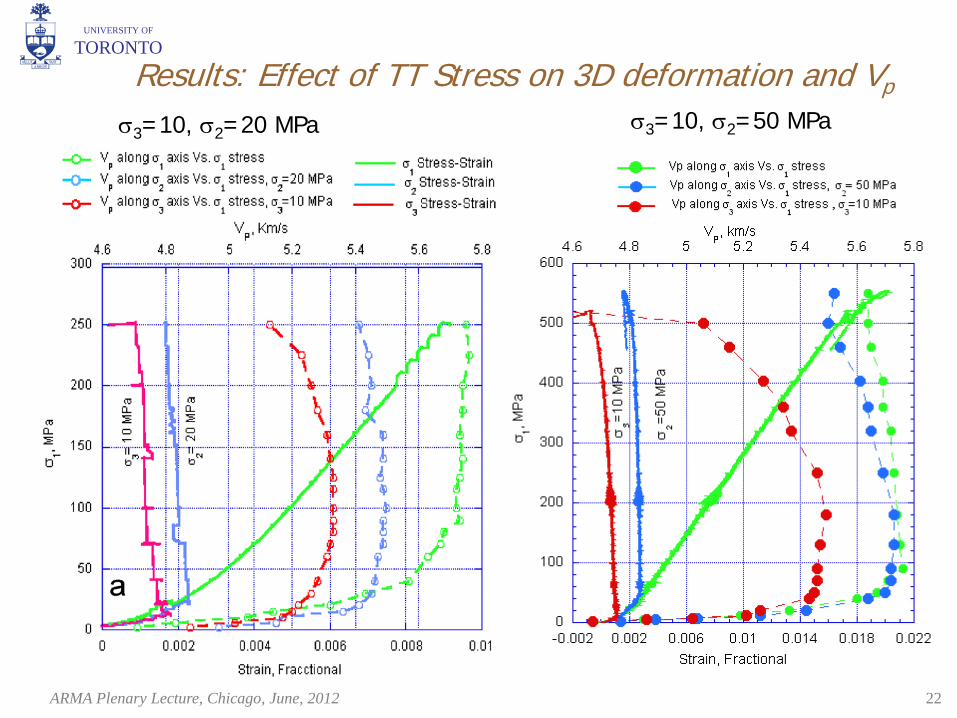
Results: Effect of TT Stress on 3D deformation and Vp σ3=10, σ2=20 MPa σ3=10, σ2=50 MPa
23 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
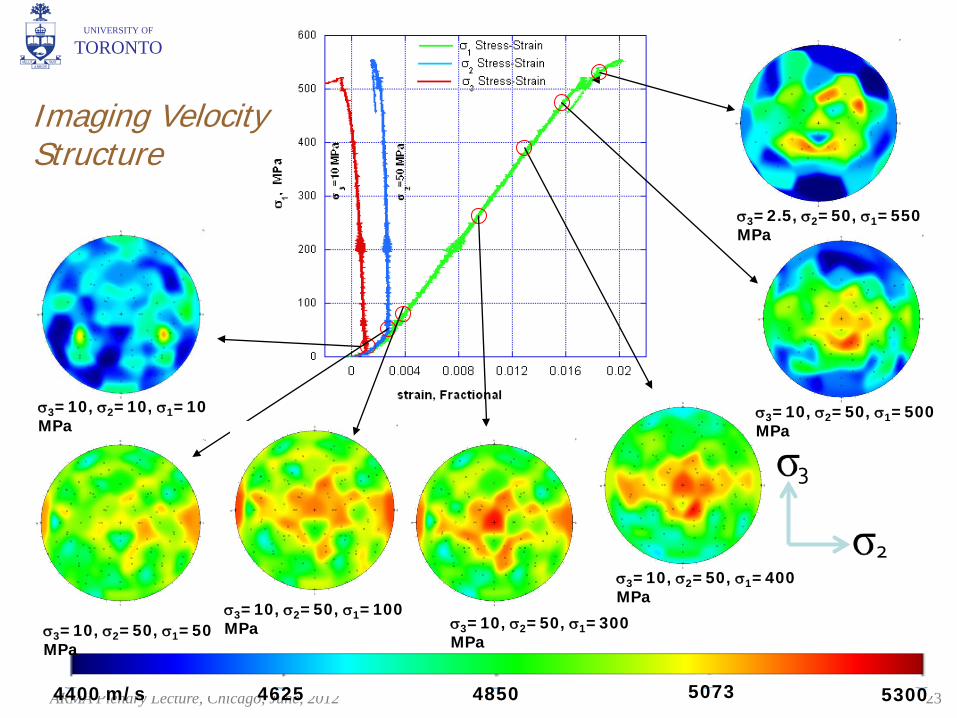
5300 5073 4850 4400 m/s 4625
3
2
σ3=10, σ2=10, σ1=10 MPa
σ3=10, σ2=50, σ1=50 MPa
σ3=10, σ2=50, σ1=100 MPa
σ3=10, σ2=50, σ1=400 MPa
σ3=10, σ2=50, σ1=300 MPa
σ3=10, σ2=50, σ1=500 MPa
σ3=2.5, σ2=50, σ1=550 MPa
Imaging Velocity Structure
24 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
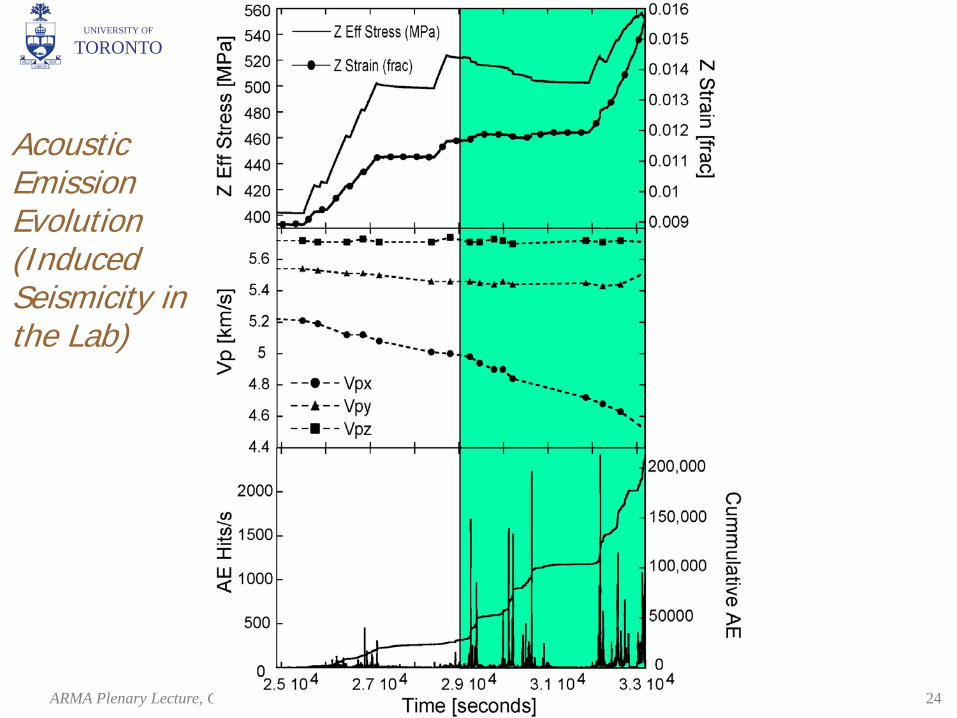
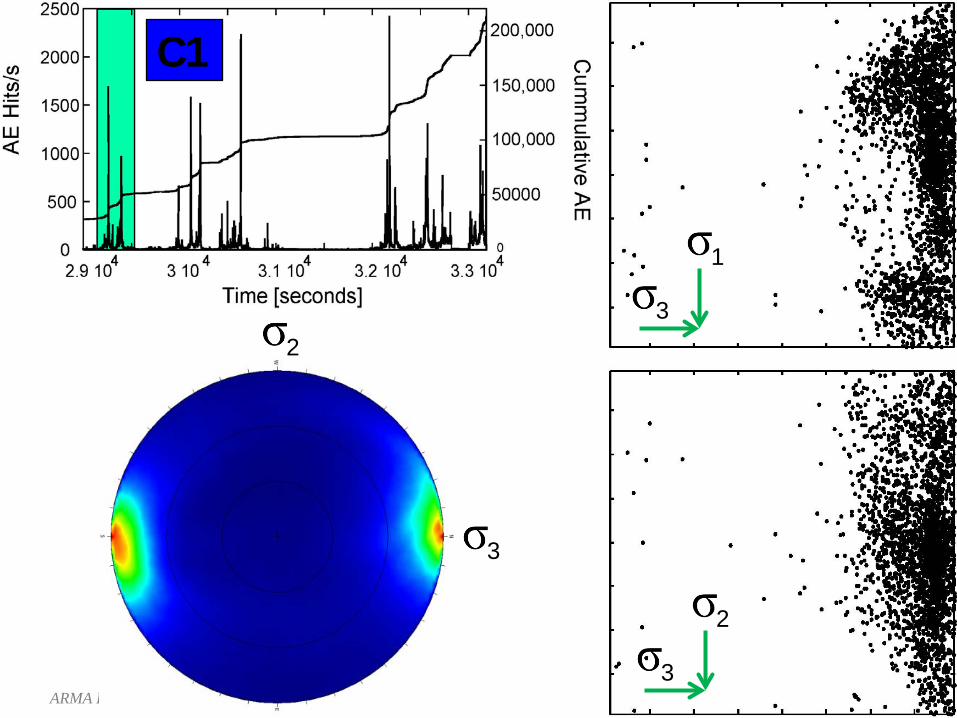
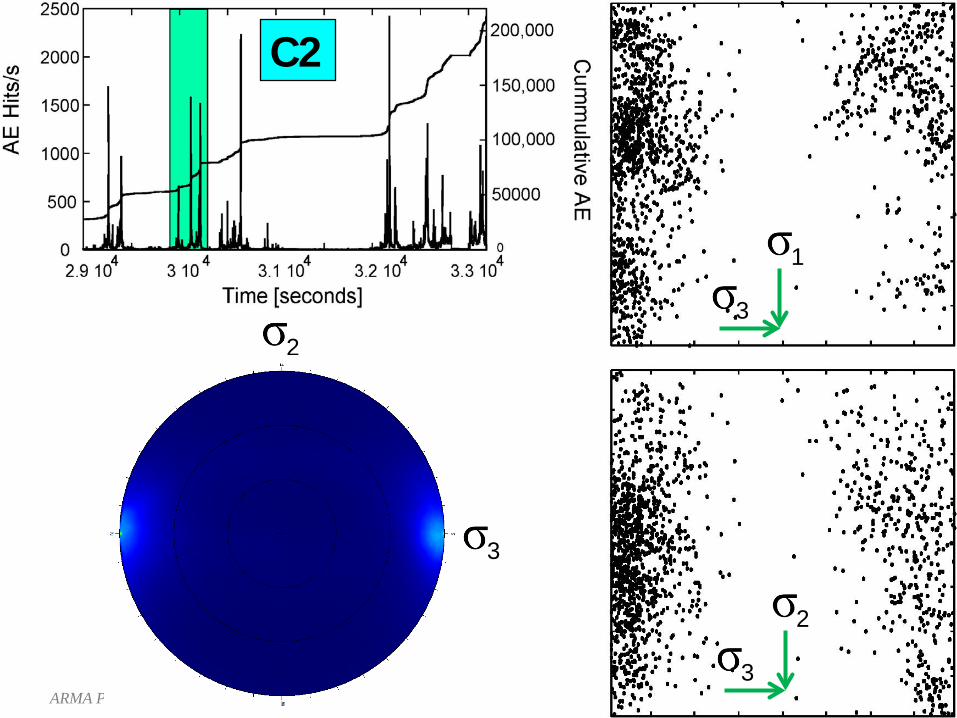
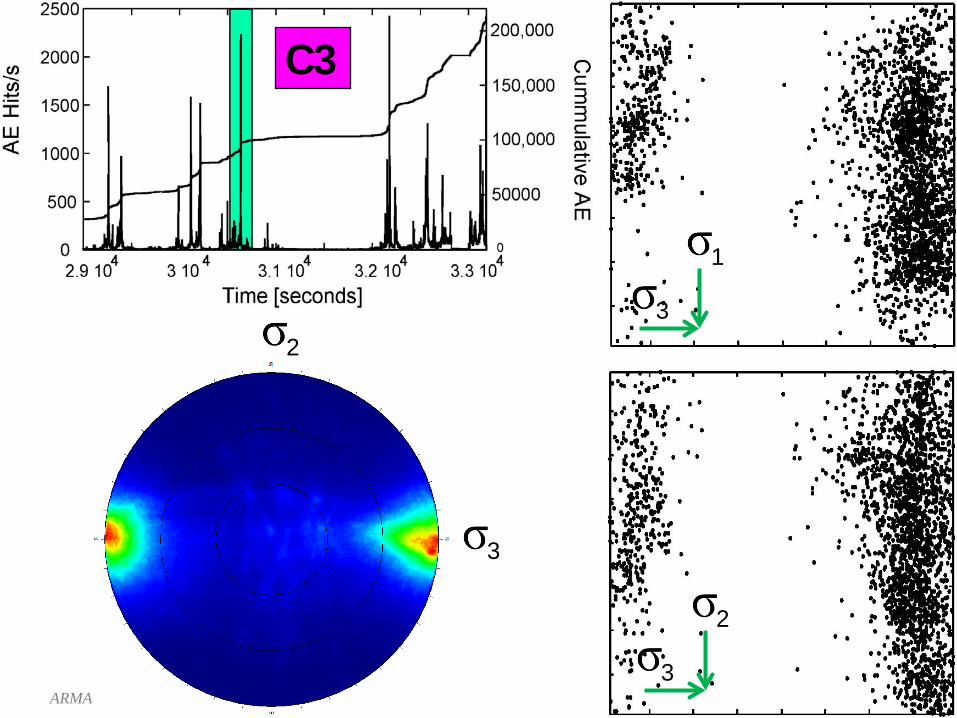
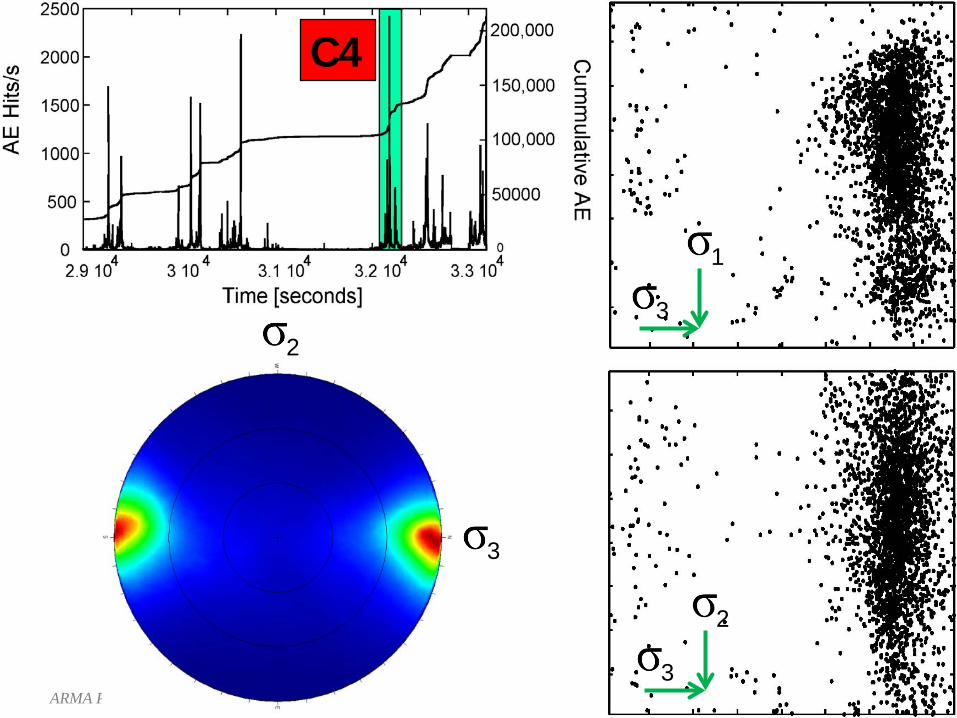
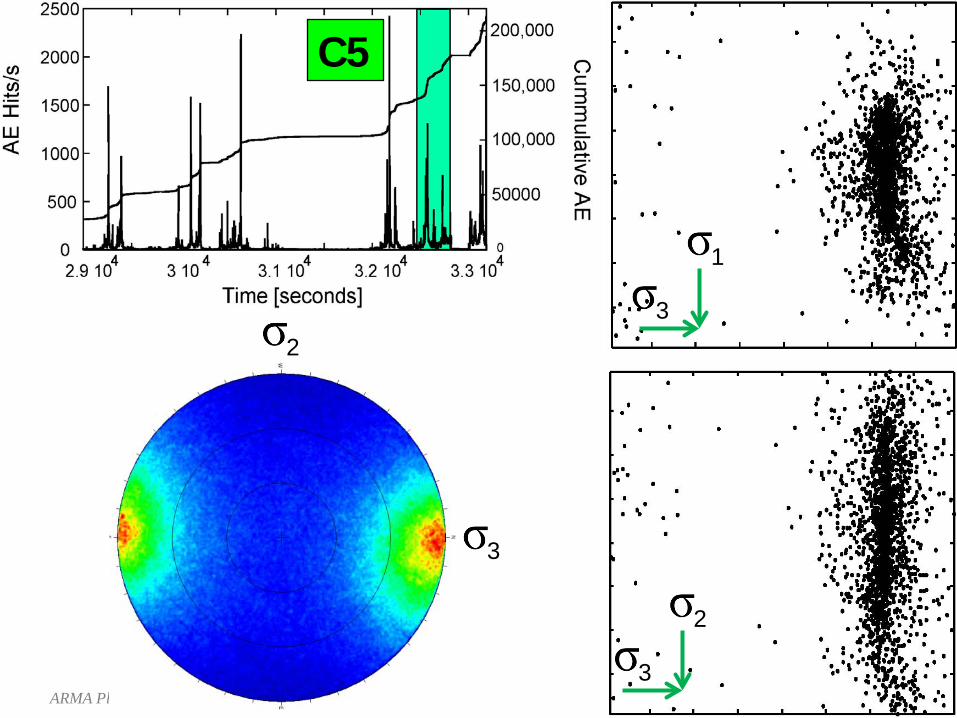
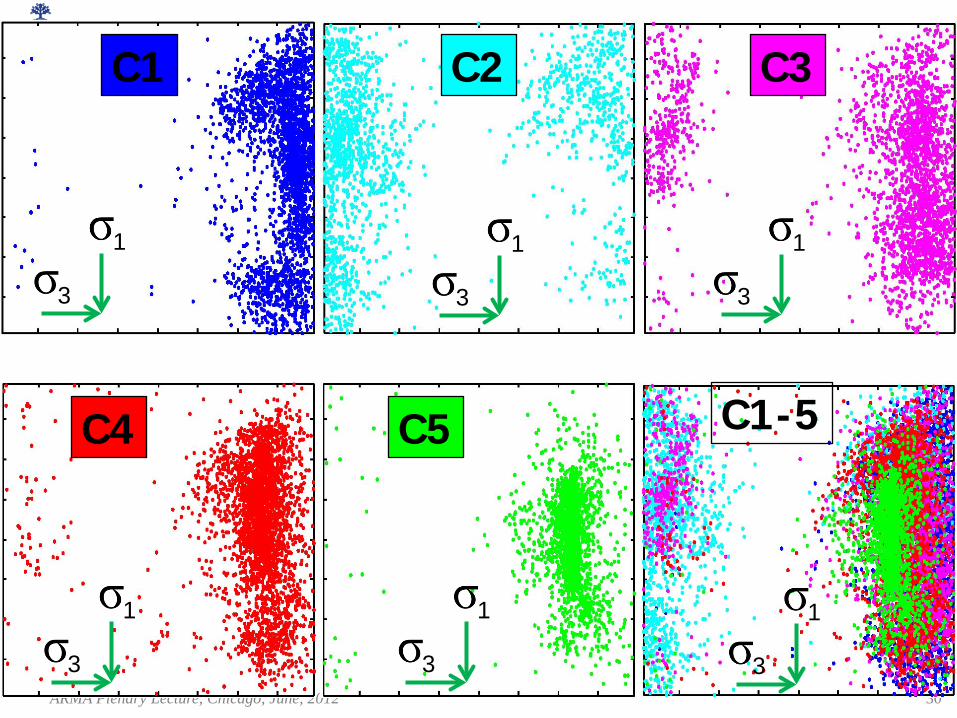
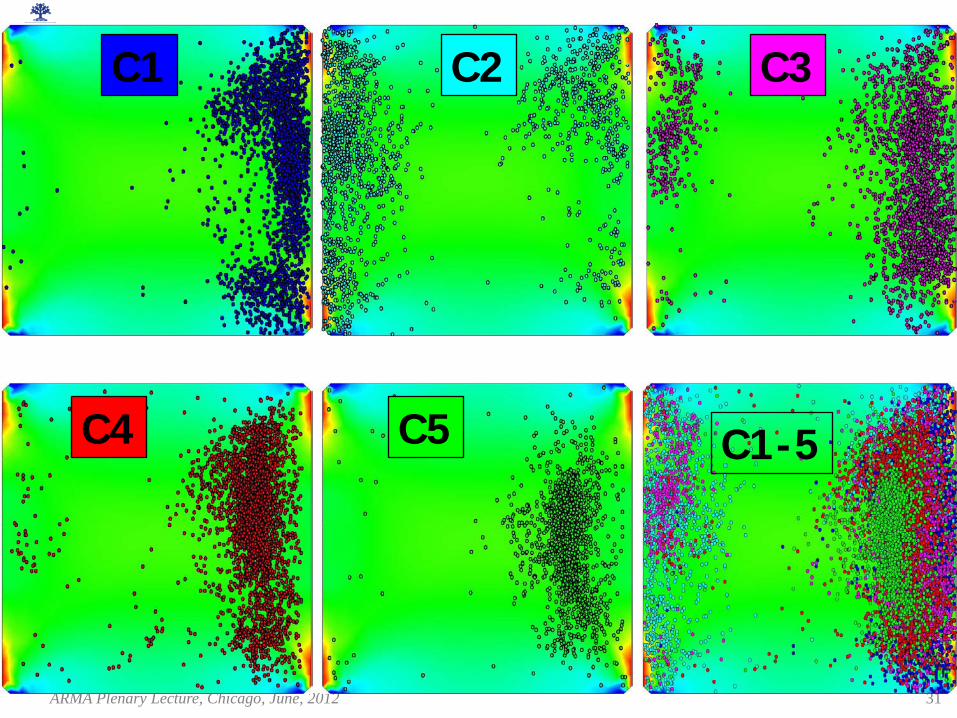
Acoustic Emission Evolution (Induced Seismicity in the Lab)
25 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
2
3
2
3
1
3
C1
26 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
2
3
C2
2
3
1
3
27 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
2
3
C3
2
3
1
3
28 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
2
3
2
3
1
3
C4
29 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
2
3
2
3
1
3
C5
30 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO C1 C3 C2
C4 C5
1
3
1
3
1
3
1
3
1
3
1
3
C1-5
31 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO C1 C3 C2
C4 C5 C1-5
32 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
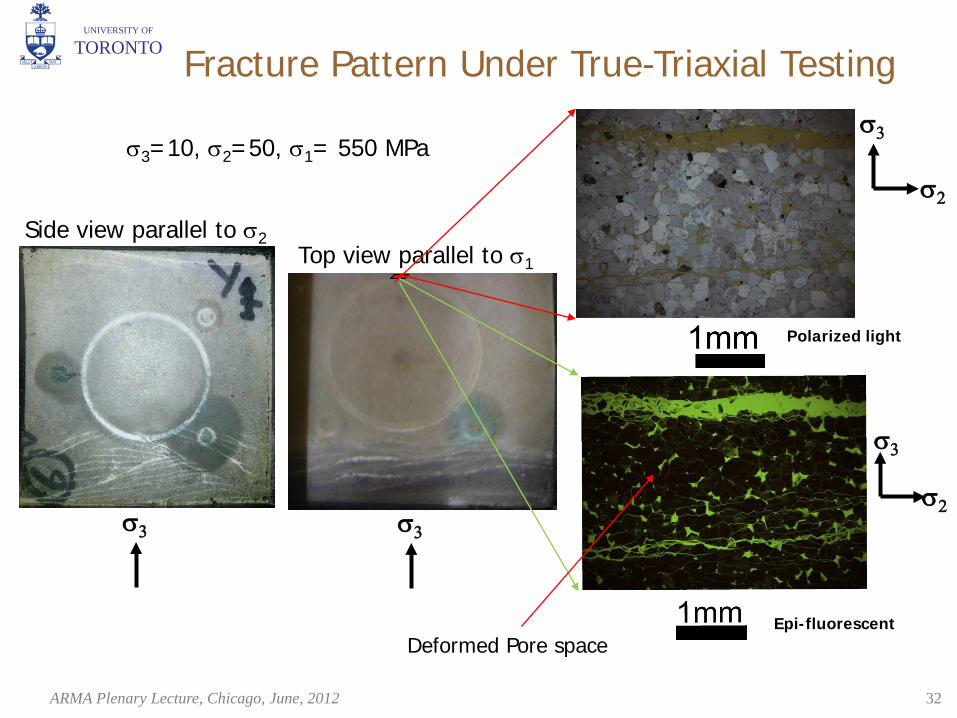
σ2
σ3
Polarized light
σ2
σ3
Epi-fluorescent Deformed Pore space
Fracture Pattern Under True-Triaxial Testing
σ3=10, σ2=50, σ1= 550 MPa
Top view parallel to σ1
Side view parallel to σ2
σ3 σ3
33 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
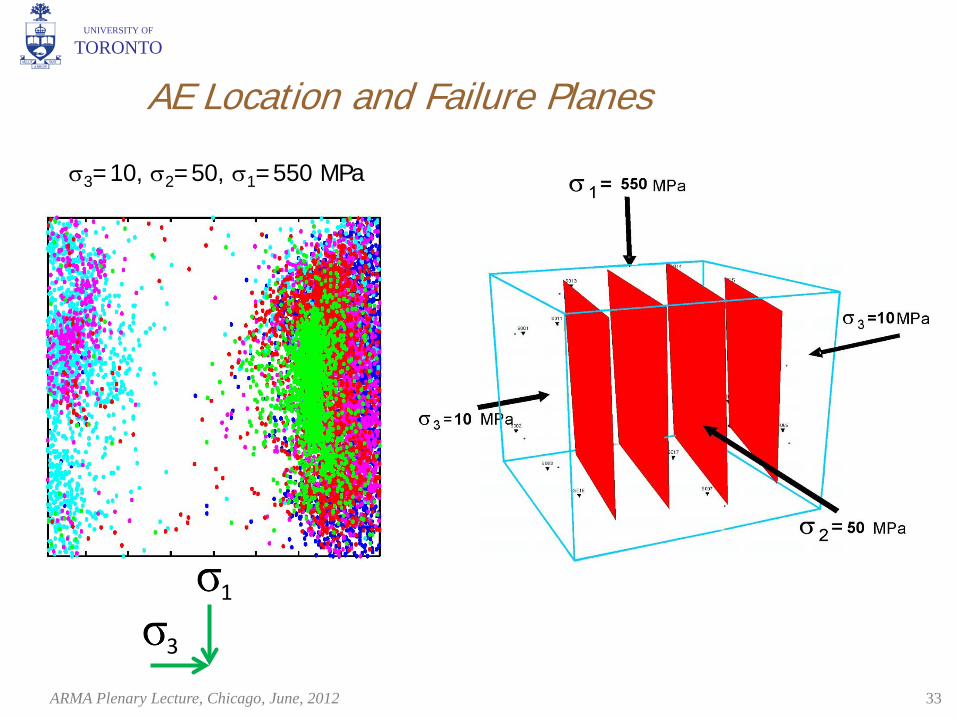
AE Location and Failure Planes
σ3=10, σ2=50, σ1=550 MPa
1
3
34 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
3D Directional Permeability under Sealed Edges
35 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
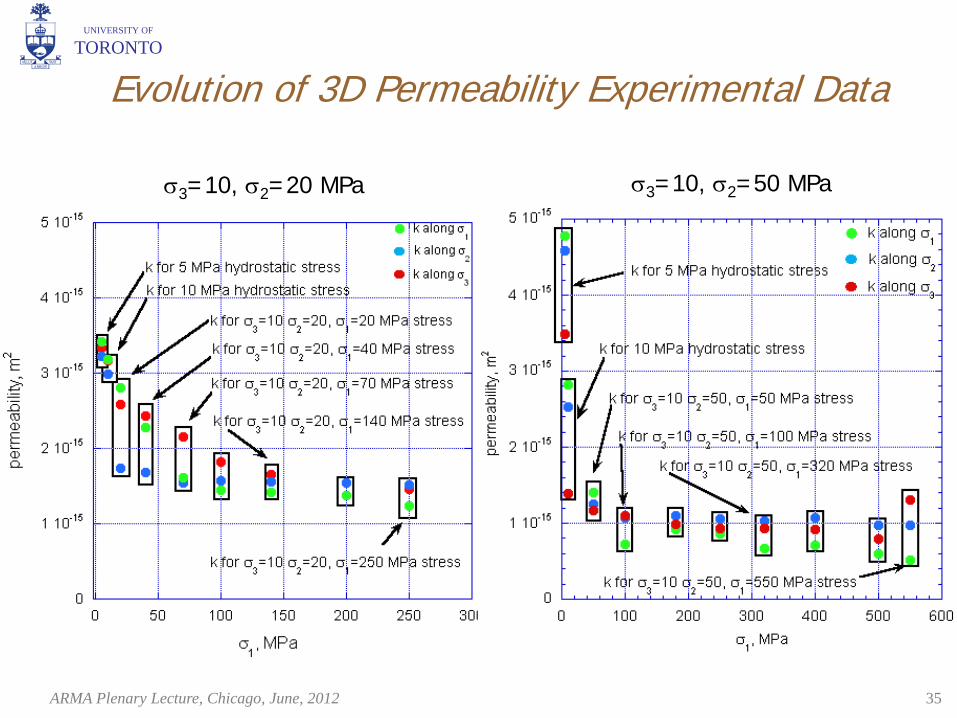
Evolution of 3D Permeability Experimental Data
σ3=10, σ2=20 MPa σ3=10, σ2=50 MPa
36 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
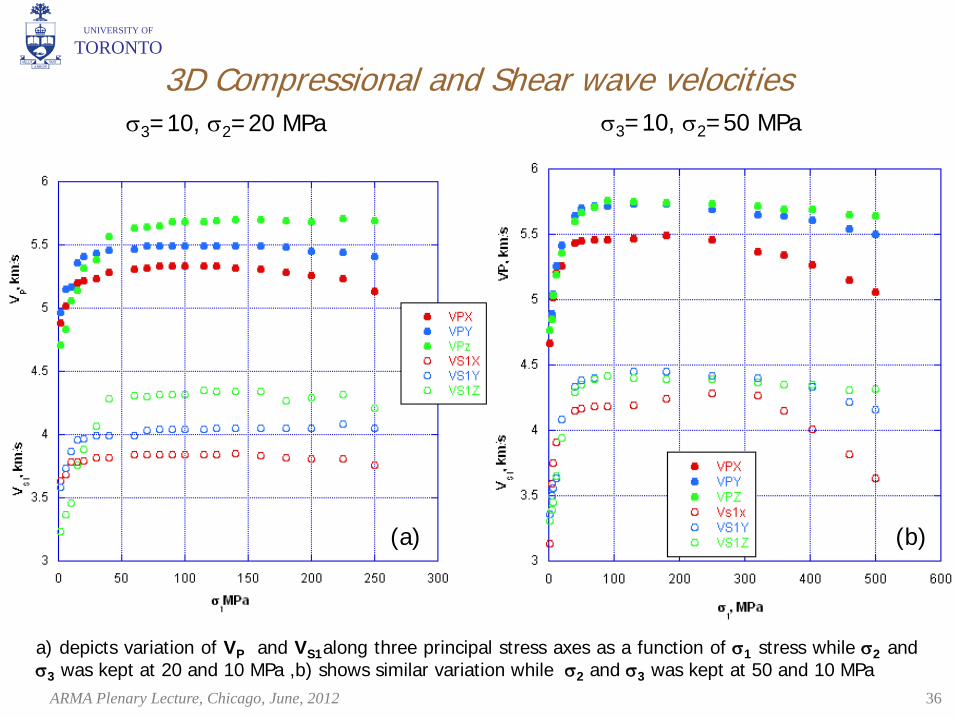
3D Compressional and Shear wave velocities
a) depicts variation of VP and VS1along three principal stress axes as a function of σ1 stress while σ2 and σ3 was kept at 20 and 10 MPa ,b) shows similar variation while σ2 and σ3 was kept at 50 and 10 MPa
σ3=10, σ2=20 MPa σ3=10, σ2=50 MPa
(a) (b)
37 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
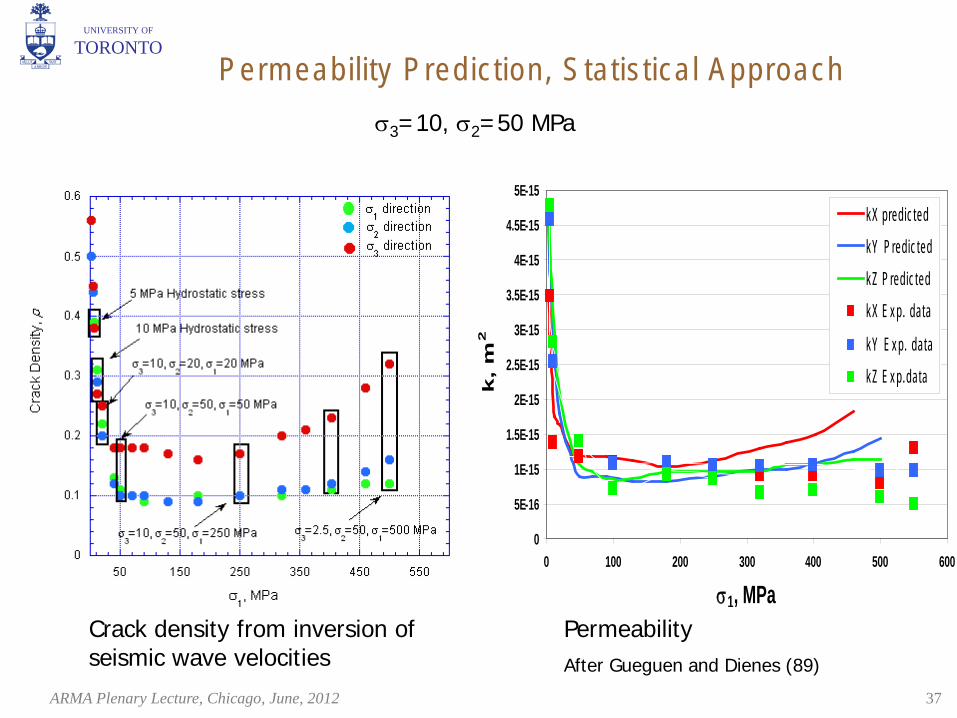
TORONTO P erm eab ility P red ic tion , S ta tis tica l A pproach
σ3=10, σ2=50 MPa
Permeability After Gueguen and Dienes (89)
Crack density from inversion of seismic wave velocities
0
5E-16
1E-15
1.5E-15
2E-15
2.5E-15
3E-15
3.5E-15
4E-15
4.5E-15
5E-15
0 100 200 300 400 500 600
σ1, MPa
k,
m2
k X predic ted
k Y P redic ted
k Z P redic ted
k X E x p. data
k Y E x p. data
k Z E x p.data
38 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
Summary of True-Triaxial Results and Future work • 3D velocity shows the effect of unequal stresses causing global
compaction prior to fracture development when preferred tension cracks were formed parallel to the σ1 and σ2 plane.
• Evolution of AE events confirm progressive development of such planes parallel to σ1 and σ2 plane.
• 3D permeability is achievable within our TTT cell and satisfies Darcy’s law. • Inherent fabric orientation and initial 3D fracture networking was not the
same between the two samples. • Increments of axial stress and compaction in the σ1 direction did influence
the transport properties in the other two horizontal directions. 3D fracture networking affects lateral K values when axial stress is increased.
• Predicted values using both methods (statistical and numerical) captured the overall trend of the 3D permeability variations as a function of axial stress increments.
• Further development of platens underway for simultaneous resistivity, permeability and compliance. Initial tests are with machinable ceramics and non conductive coatings.
• Future work on lab hydraulic fracturing under true-triaxial conditions to help validate Bonded Particle and Synthetic Rock numerical models for true-triaxial conditions at elevated temperatures.
39 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
Future Potential for Induced Seismicity Monitoring
• Reservoir Stimulation via Hydraulic Fracturing
• Shale Gas
• Mass Mining
• Geothermal
• CO2 Sequestration
• Deep Geological Disposal of Radioactive Waste
• Laboratory Investigations
40 ARMA Plenary Lecture, Chicago, June, 2012
UNIVERSITY OF
TORONTO
Thank you