roboterarm und gelenke - tu-chemnitz.de · beispiel 3 • die rotation um die x-achse mit winkel...
TRANSCRIPT
4 Roboterkinematik
Roboterarm und Gelenke
4.1 Grundlegende Begriffe
Mechanismus• besteht aus einer Anzahl von starren Körpern (Glieder)• diese sind durch Gelenke verbunden• Ein Gelenk verbindet genau zwei Glieder.• Die Gelenke erlauben den Gliedern eine eingeschränkte
Bewegung relativ zueinander.• Ein Glied kann mehrere Gelenke haben.• Zwei Glieder können durch mehrere Gelenke verbunden
sein.• Gelenke werden nicht als eigenständige materielle
Körper angesehen, vielmehr werden die Gelenkhälften als Bestandteile der dadurch verbundenen Glieder betrachtet.
Kinematik
• Untersuchung der Bewegungsmöglichkeiten der Glieder eines gegebenen Mechanismus relativ zueinander
• Auftretende Geschwindigkeiten und Beschleunigungen bei Bewegung der Gelenke
• keine Betrachtung von Kräften• Es wird abstrahiert, ob ein Gelenk motorisch
angetrieben oder passiv bewegt wird.
Dynamik
• Betrachtung von Kräften, die auf den Mechanismus einwirken
• Trägheitskraft• Schwerkraft
Analyse und Synthese
• Analyse– mathematische Erfassung der
Zwangsbewegungen eines gegebenen Mechanismus
– Zusammenhang zwischen den Gelenkeinstellungen und der Lage (Position und Orientierung) der Glieder zueinander
• Synthese– Konstruktion eines Mechanismus, der eine
vorgeschriebene Bewegung realisiert
Kinematische Kette
• Jedes Glied hat maximal zwei Gelenke.• Besitzt jedes Glied genau zwei Gelenke,
so wird die kinematische Kette als geschlossen bezeichnet
• andernfalls als offen
Offene kinematische Kette
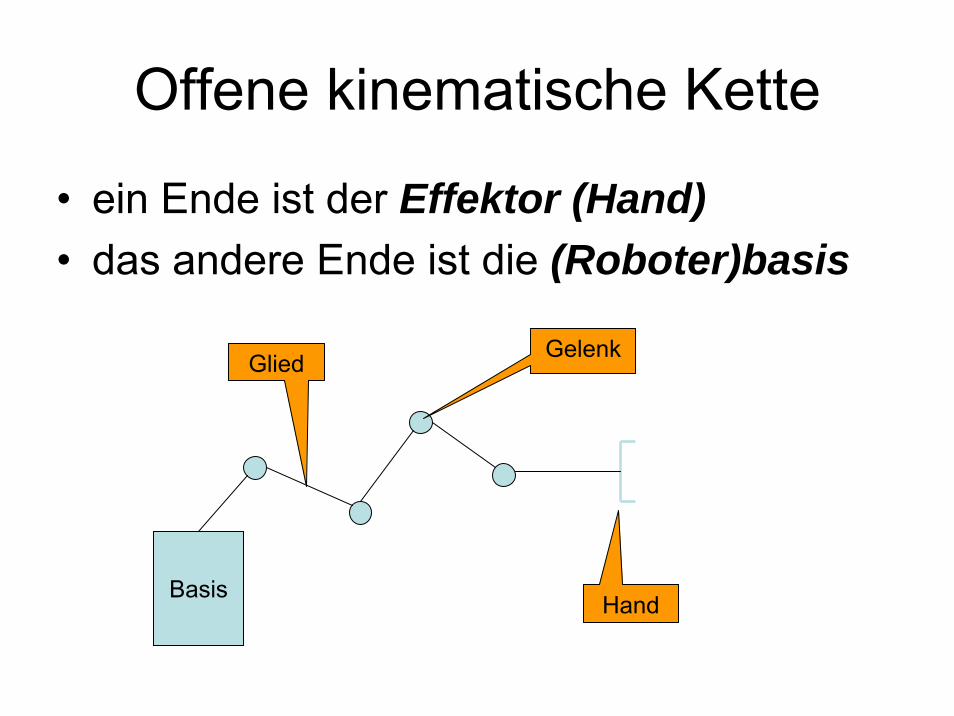
• ein Ende ist der Effektor (Hand)• das andere Ende ist die (Roboter)basis
BasisHand
Glied Gelenk
4.2 Gelenke
Gelenkarten • Rotationsgelenk (Drehgelenk) – das eine Glied
dreht sich relativ zum anderen um eine feste Achse– Torsionsgelenk– Revolvergelenk
• Translationsgelenk (Lineargelenk) – das eine Glied gleitet relativ zum anderen entlang einer festen Achse
• Weitere Arten können durch Kombination dieser beiden dargestellt werden.– Kugelgelenk– ebenes Gelenk

Rotationsgelenk
Achse
TorsionsgelenkRevolvergelenk
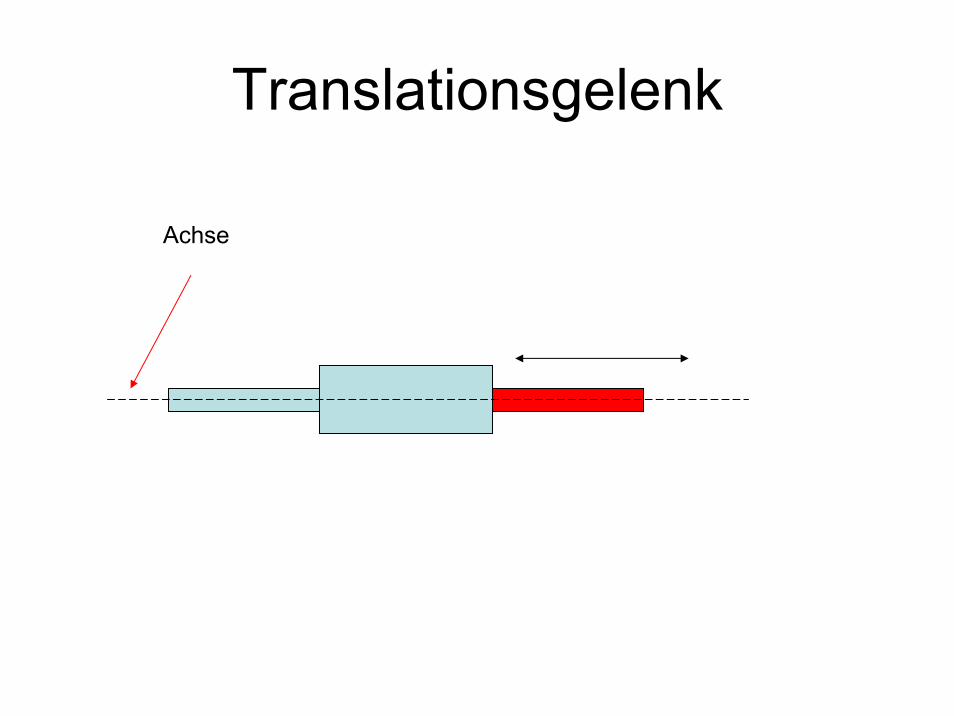
Translationsgelenk
Achse
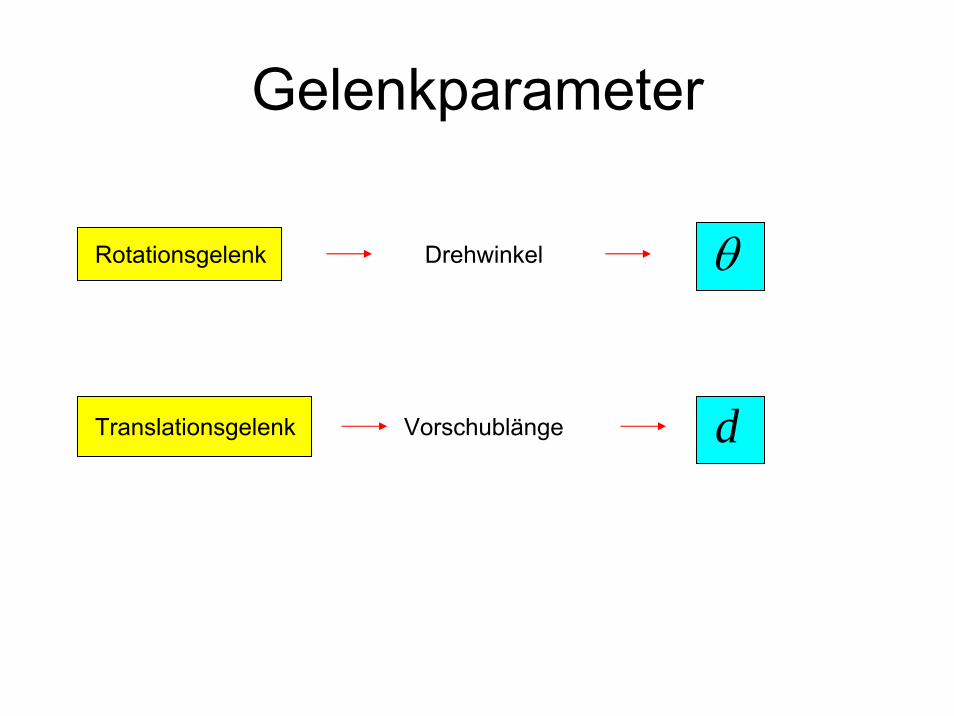
Gelenkparameter
Rotationsgelenk Drehwinkel
Translationsgelenk Vorschublänge
θ
d

Weitere Begriffe
• ideale Gelenke – keine Begrenzungen der Bewegungen
• Gelenkkonfiguration (Konfiguration) –Menge von Gelenkeinstellungen (Gelenkparameter)
• Konfigurationsraum – Menge aller Gelenkkonfigurationen
4.3 Kinematische Grundprobleme
2 Aufgabenstellungen• Direktes kinematisches Problem (DKP)
– Welche Position und Orientierung nimmt der Effektorbezogen auf die Roboterbasis für eine gegebene Gelenkkonfiguration ein?
– Lösung: direkte kinematische Transformation oder Vorwärtstransformation
• Inverses kinematisches Problem (IKP)– Welche Gelenkkonfiguration führt auf die
vorgegebene Lage des Effektors?– Lösung: inverse kinematische Transformation oder
Rückwärtstransformation
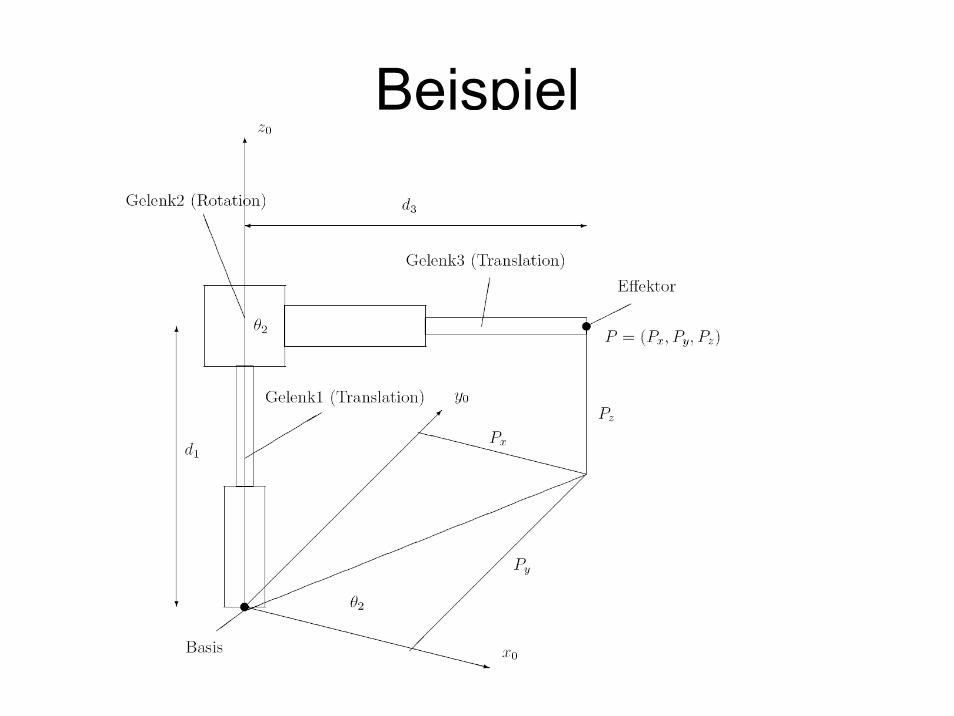
Beispiel
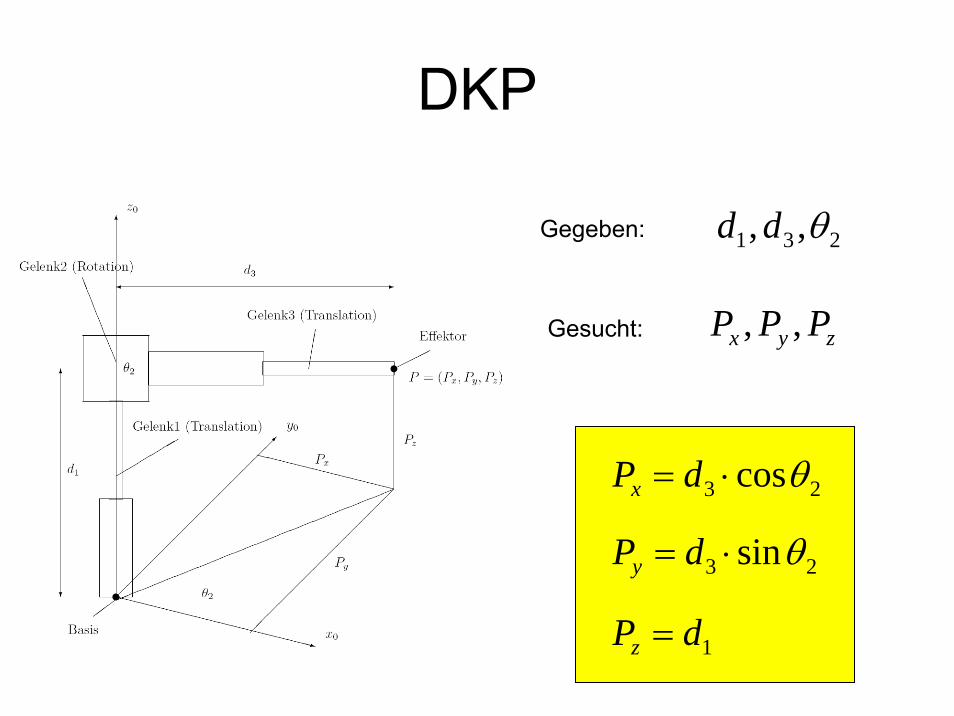
DKP
Gegeben:
Gesucht:
231 ,, θdd
zyx PPP ,,
23 cosθ⋅= dPx
23 sinθ⋅= dPy
1dPz =
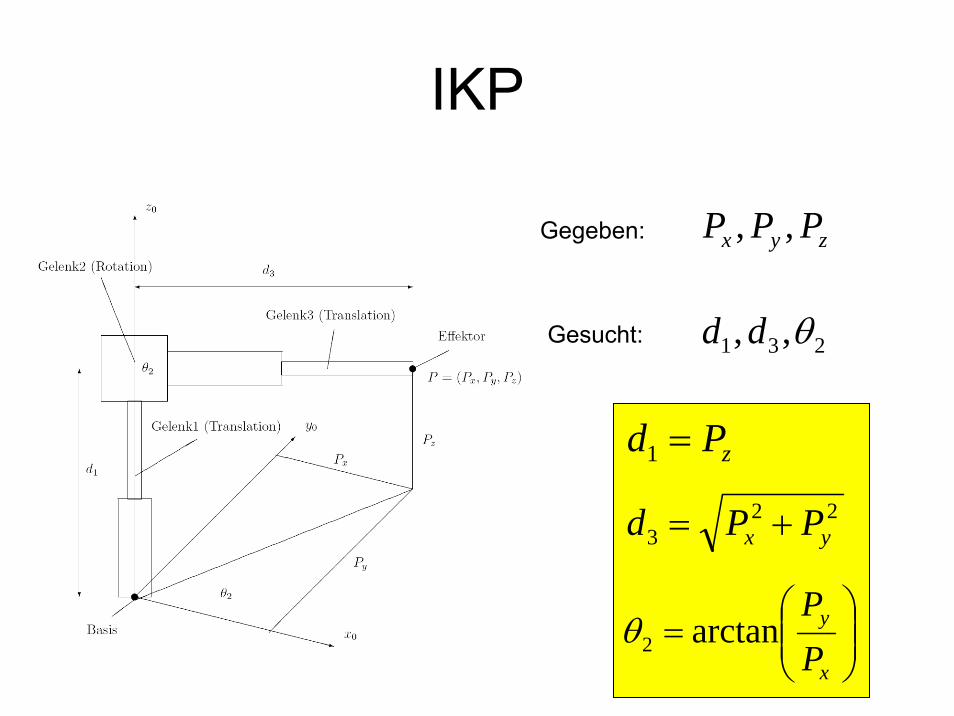
IKP
Gesucht:
Gegeben:
231 ,, θdd
zyx PPP ,,
zPd =1
223 yx PPd +=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
x
y
PP
arctan2θ
Bemerkungen
• DKP lässt sich explizit, analytisch lösen• für IKP ist dies i. a. nicht möglich• aber IKP ist für die Robotik wichtiger
4.4 Stellungsbesschreibungund Stellungstransformation
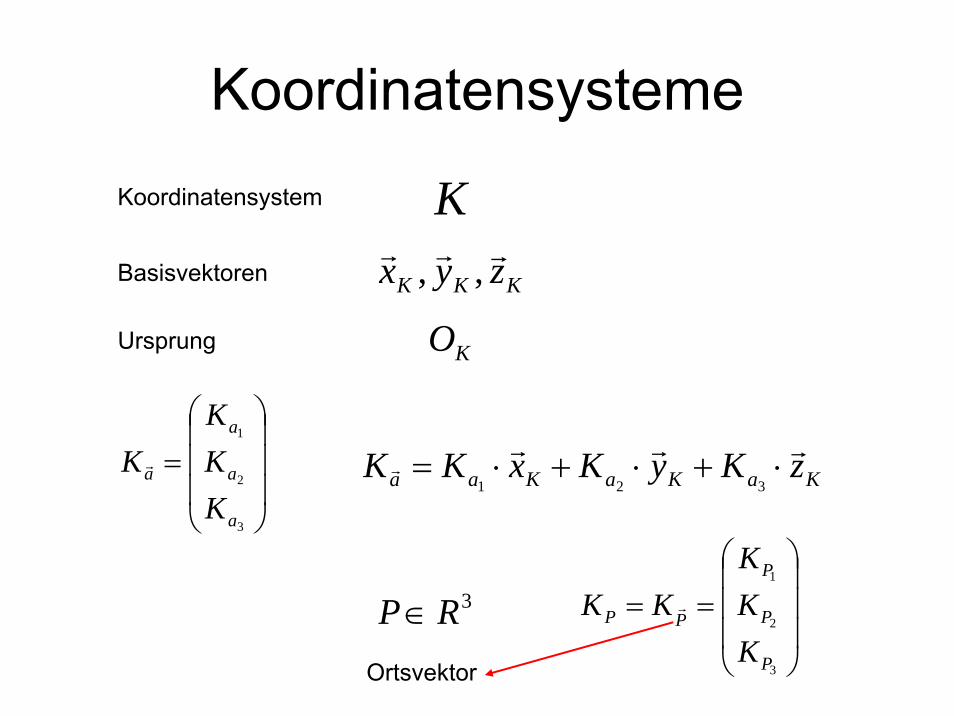
Koordinatensysteme
KKKK zyx rrr ,,
KO
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
=
3
2
1
a
a
a
a
KKK
K rKaKaKaa zKyKxKK rrr
r ⋅+⋅+⋅=321
3RP∈⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
==
3
2
1
P
P
P
PP
KKK
KK r
Koordinatensystem
Basisvektoren
Ursprung
Ortsvektor
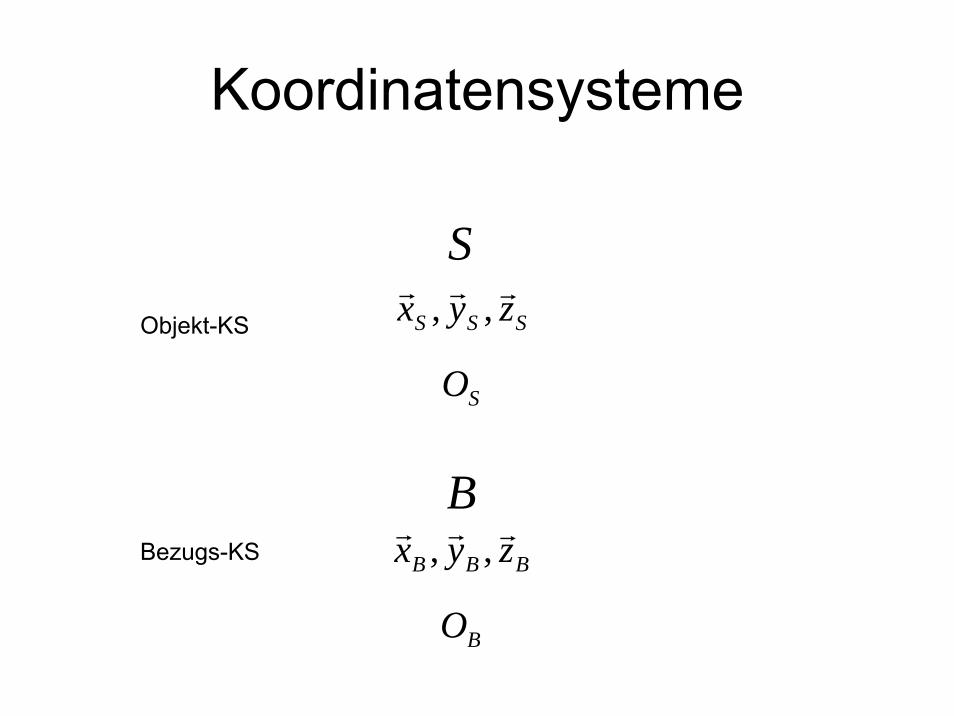
Koordinatensysteme
SSSS zyx rrr ,,
SO
BBBB zyx rrr ,,
BO
Objekt-KS
Bezugs-KS
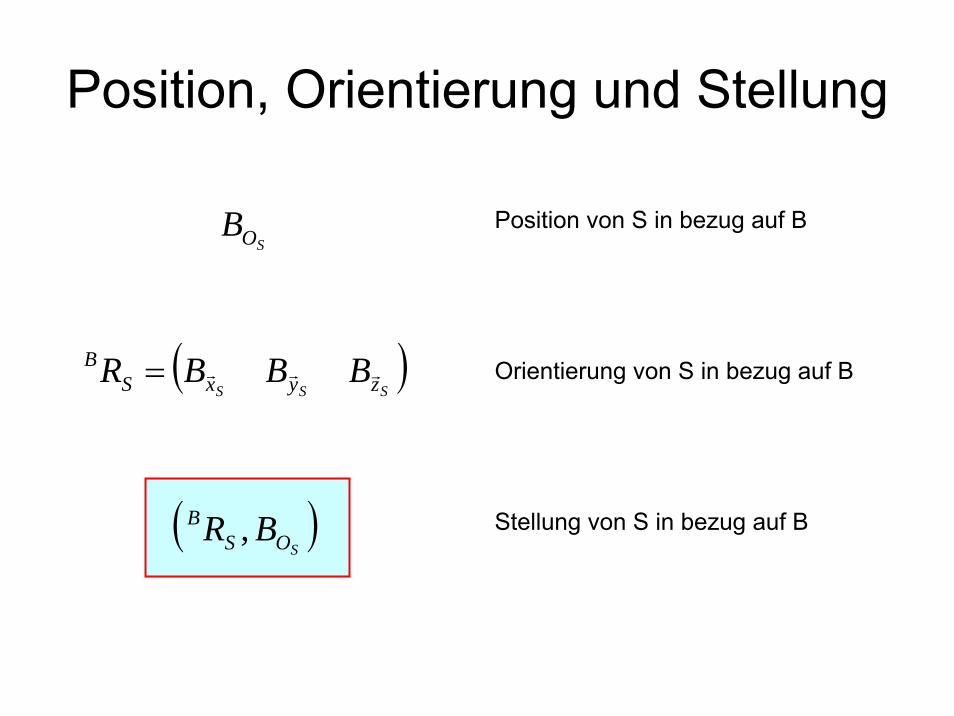
Position, Orientierung und Stellung
SOB Position von S in bezug auf B
( )SSS zyxS
B BBBR rrr= Orientierung von S in bezug auf B
Stellung von S in bezug auf B( )SOS
B BR ,
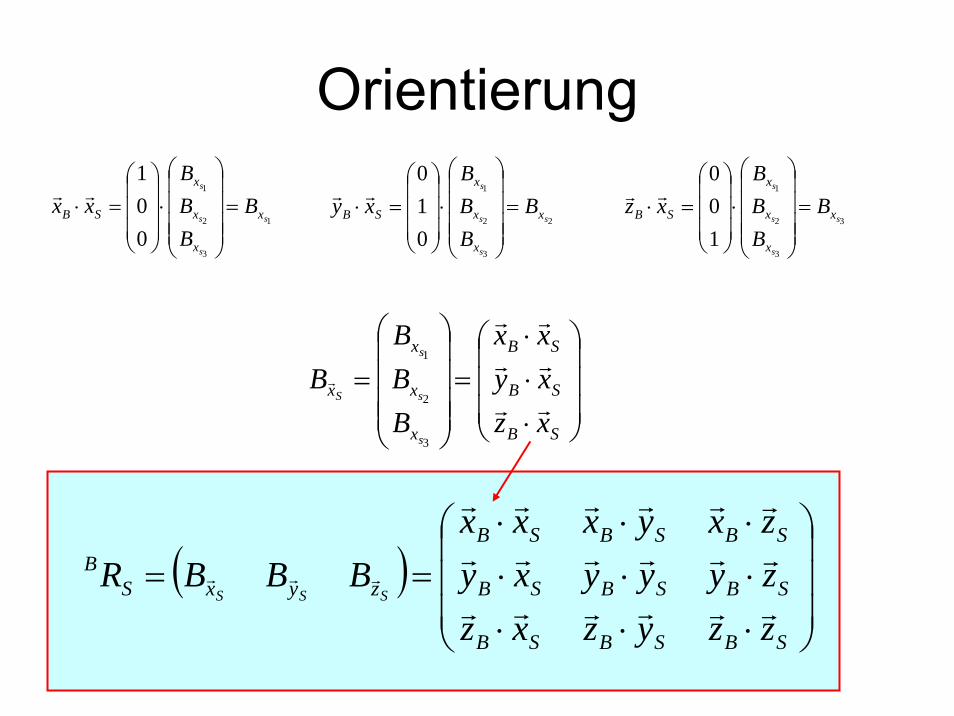
Orientierung
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⋅⋅⋅
=⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
=
SB
SB
SB
x
x
x
x
xzxyxx
BBB
B
s
s
s
S rr
rr
rr
r
3
2
1
1
3
2
1
001
s
s
s
s
x
x
x
x
SB BBBB
xx =⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
⋅⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=⋅
rr2
3
2
1
010
s
s
s
s
x
x
x
x
SB BBBB
xy =⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
⋅⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=⋅
rr3
3
2
1
100
s
s
s
s
x
x
x
x
SB BBBB
xz =⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
⋅⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=⋅
rr
( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⋅⋅⋅⋅⋅⋅⋅⋅⋅
==
SBSBSB
SBSBSB
SBSBSB
zyxSB
zzyzxzzyyyxyzxyxxx
BBBRSSS rrrrrr
rrrrrr
rrrrrr
rrr
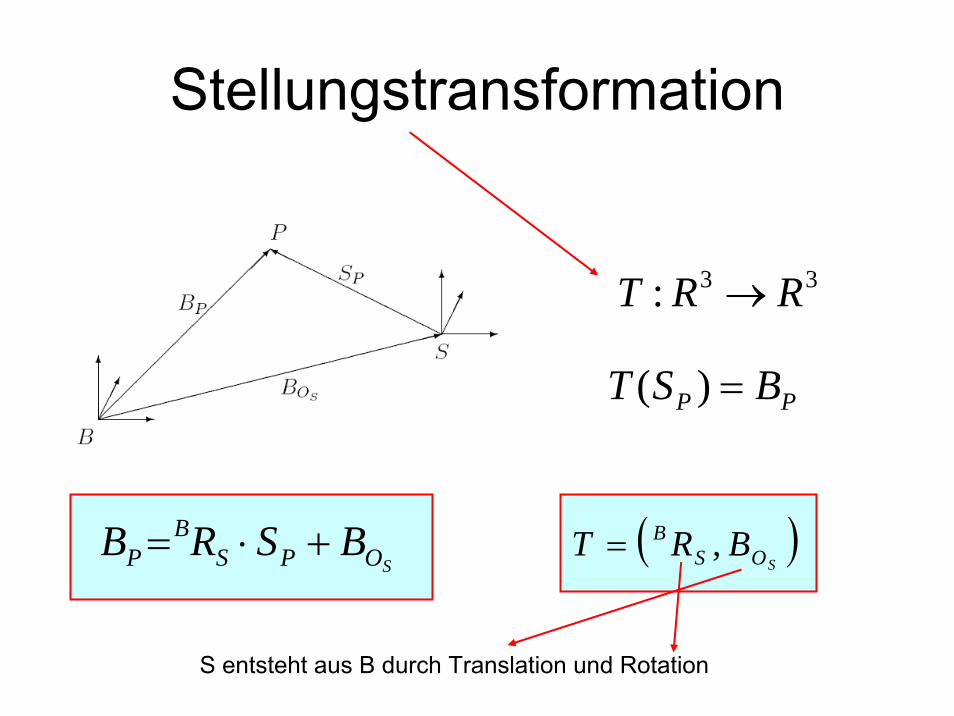
Stellungstransformation
33: RRT →
SOPSB
P BSRB +⋅=
PP BST =)(
( )SOS
B BRT ,=
S entsteht aus B durch Translation und Rotation
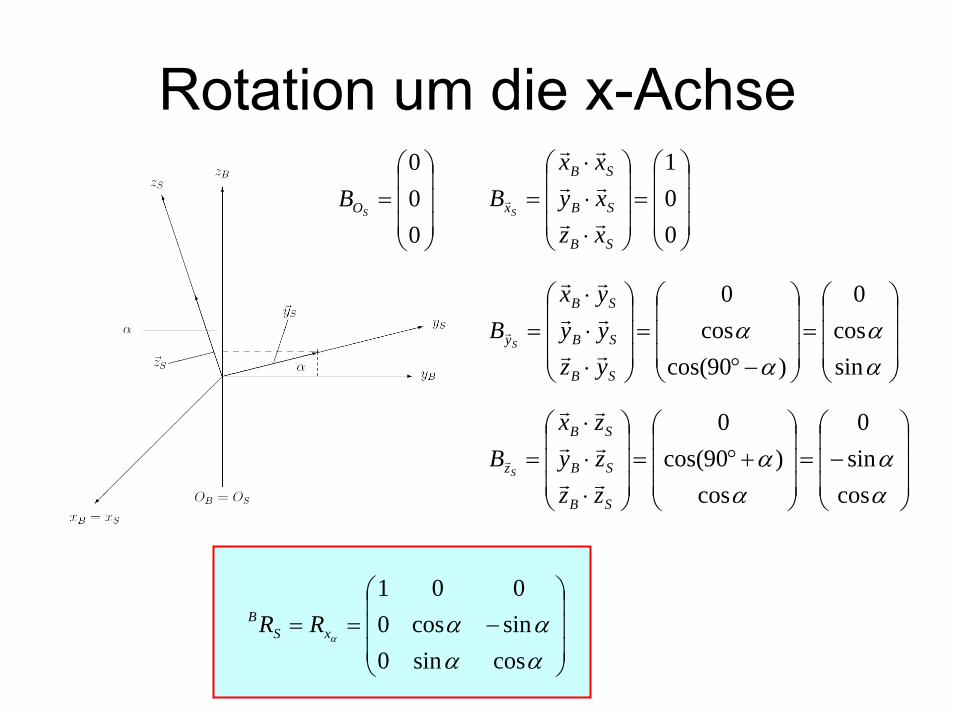
Rotation um die x-Achse
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⋅⋅⋅
=001
SB
SB
SB
x
xzxyxx
BS rr
rr
rr
r
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−°=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⋅⋅⋅
=αα
αα
sincos
0
)90cos(cos
0
SB
SB
SB
y
yzyyyx
BS rr
rr
rr
r
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛+°=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⋅⋅⋅
=αα
αα
cossin0
cos)90cos(
0
SB
SB
SB
z
zzzyzx
BS rr
rr
rr
r
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
000
SOB
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−==
αααα
α
cossin0sincos0001
xSB RR
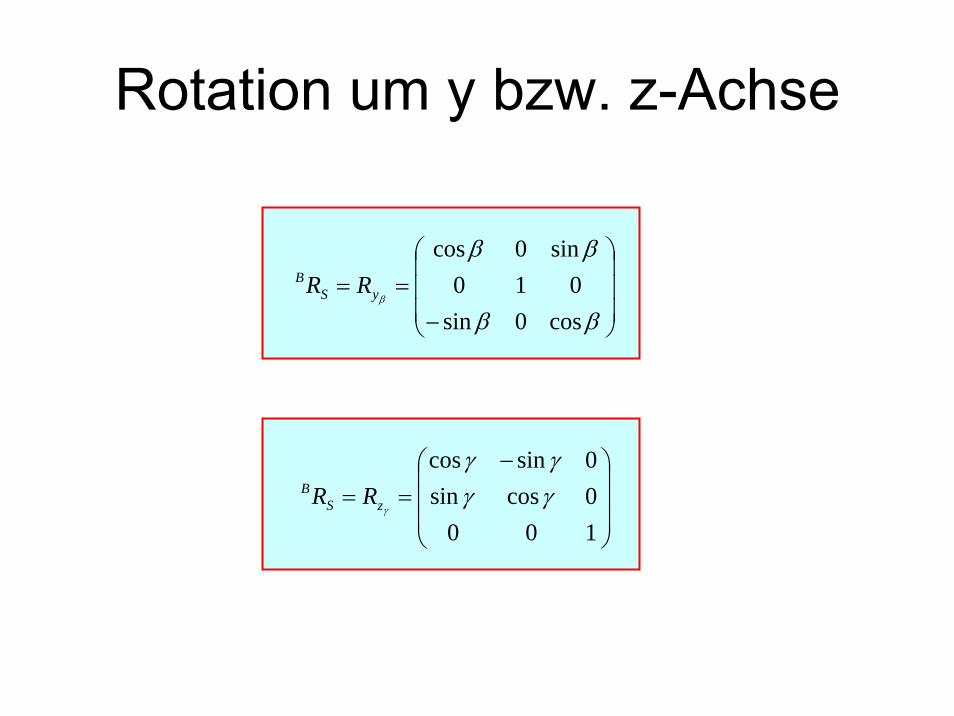
Rotation um y bzw. z-Achse
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−==
ββ
ββ
β
cos0sin010
sin0cos
ySB RR
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −==
1000cossin0sincos
γγγγ
γzSB RR
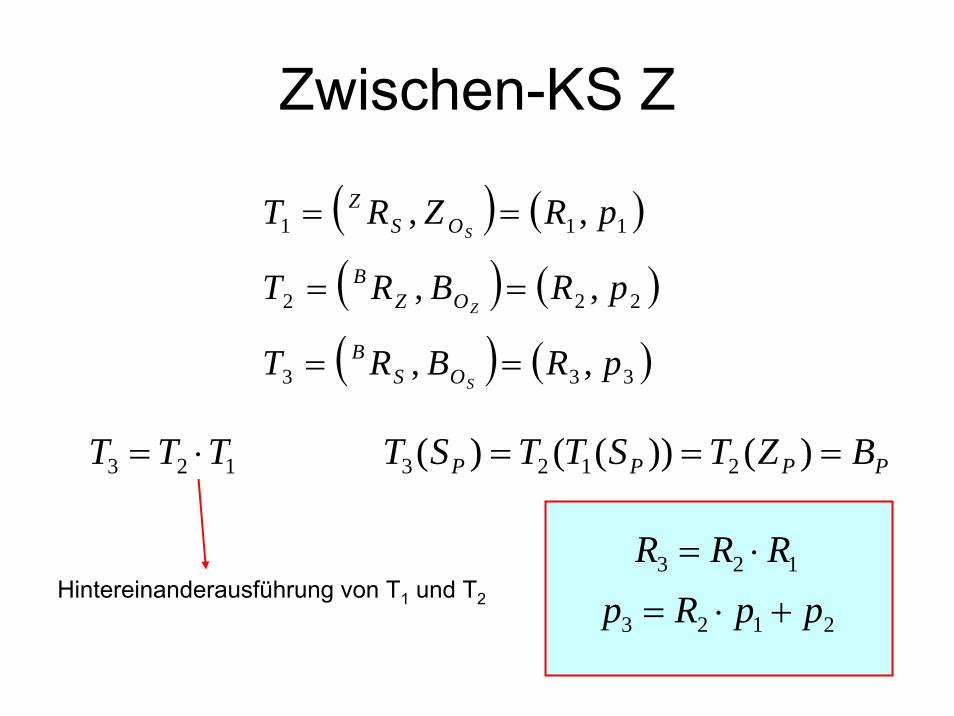
Zwischen-KS Z
( ) ( )111 ,, pRZRTSOS
Z ==
( ) ( )222 ,, pRBRTZOZ
B ==
( ) ( )333 ,, pRBRTSOS
B ==
123 TTT ⋅=
Hintereinanderausführung von T1 und T2
PPPP BZTSTTST === )())(()( 2123
123 RRR ⋅=
2123 ppRp +⋅=
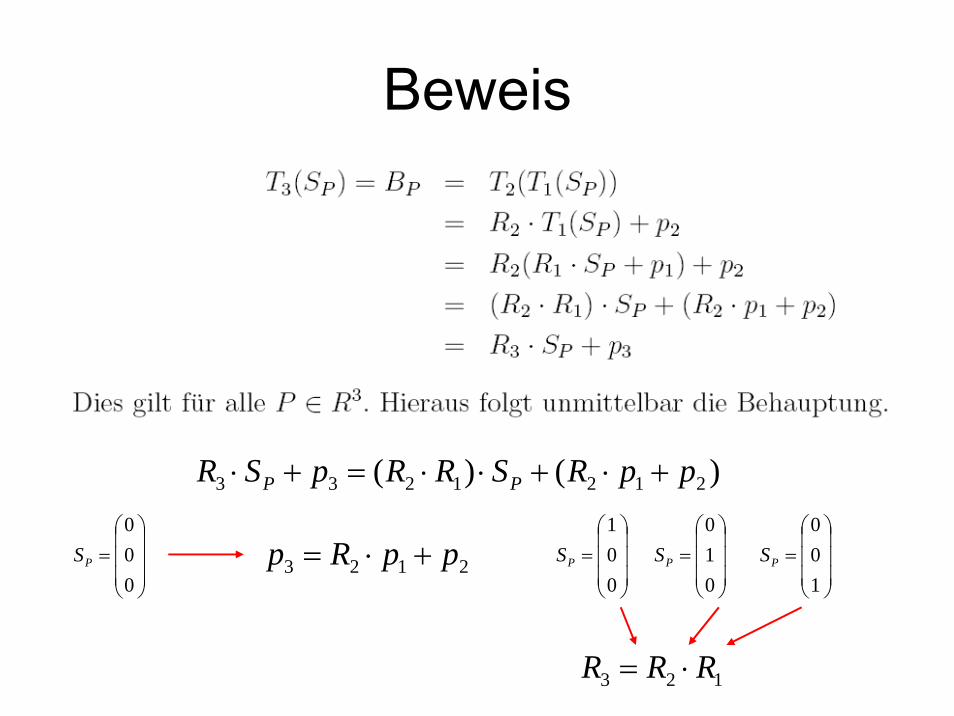
Beweis
)()( 2121233 ppRSRRpSR PP +⋅+⋅⋅=+⋅
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
000
PS 2123 ppRp +⋅=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
001
PS⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
010
PS⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
100
PS
123 RRR ⋅=
Bemerkung
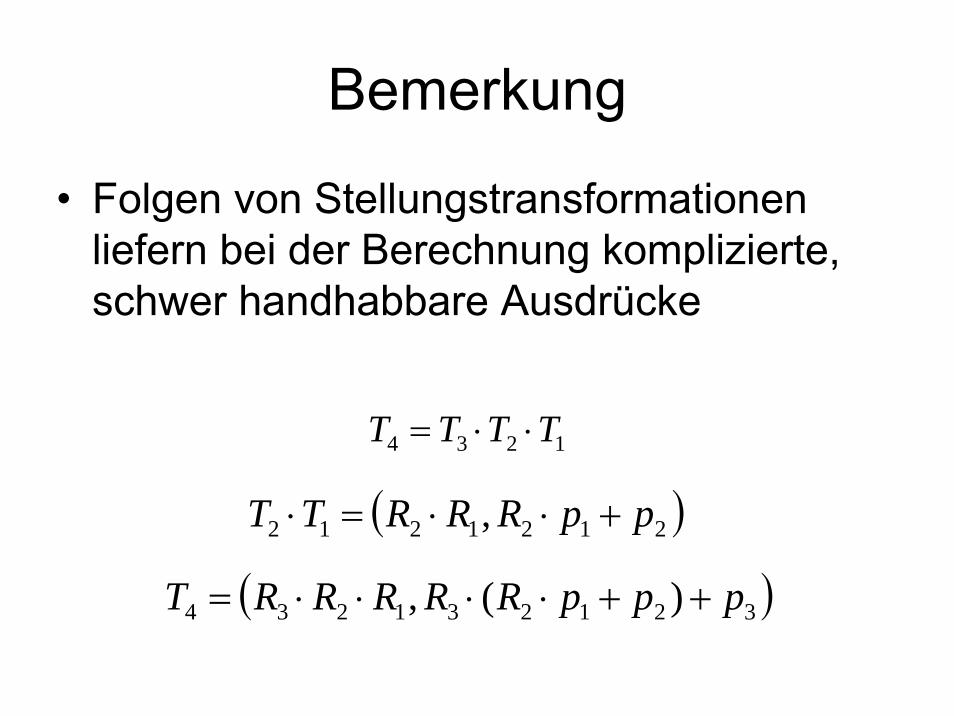
• Folgen von Stellungstransformationen liefern bei der Berechnung komplizierte, schwer handhabbare Ausdrücke
1234 TTTT ⋅⋅=
( )2121212 , ppRRRTT +⋅⋅=⋅
( )321231234 )(, pppRRRRRT ++⋅⋅⋅⋅=
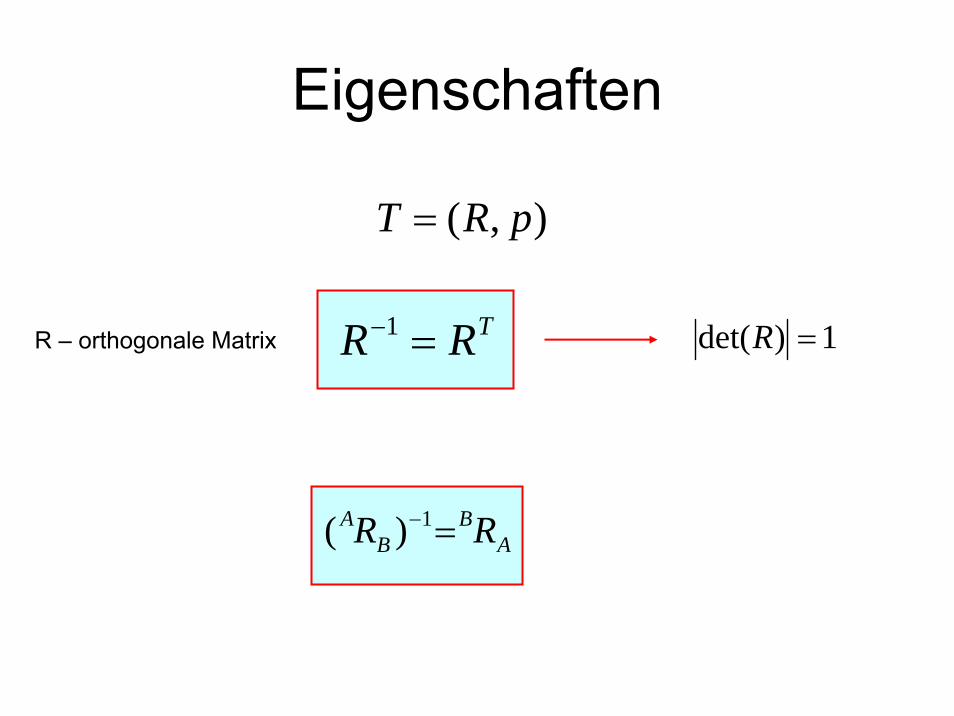
Eigenschaften
),( pRT =
TRR =−1R – orthogonale Matrix 1)det( =R
AB
BA RR =−1)(
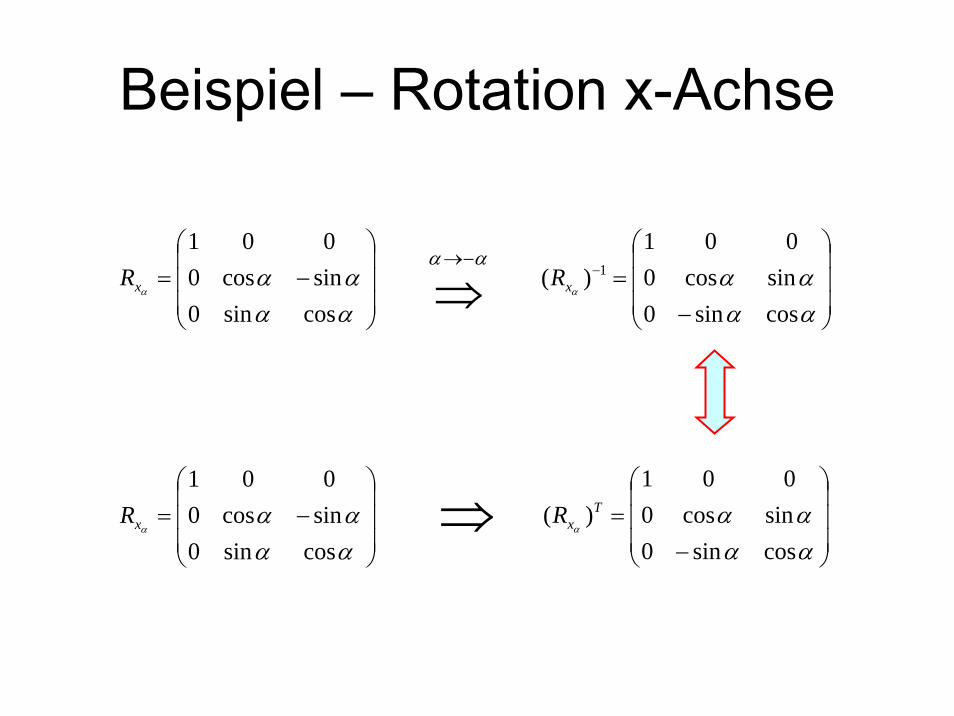
Beispiel – Rotation x-Achse
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−=
αααα
α
cossin0sincos0001
xR⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−=−
αααα
α
cossin0sincos0
001)( 1
xR⇒−→ αα
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−=
αααα
α
cossin0sincos0001
xR⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−=
αααα
α
cossin0sincos0
001)( T
xR⇒
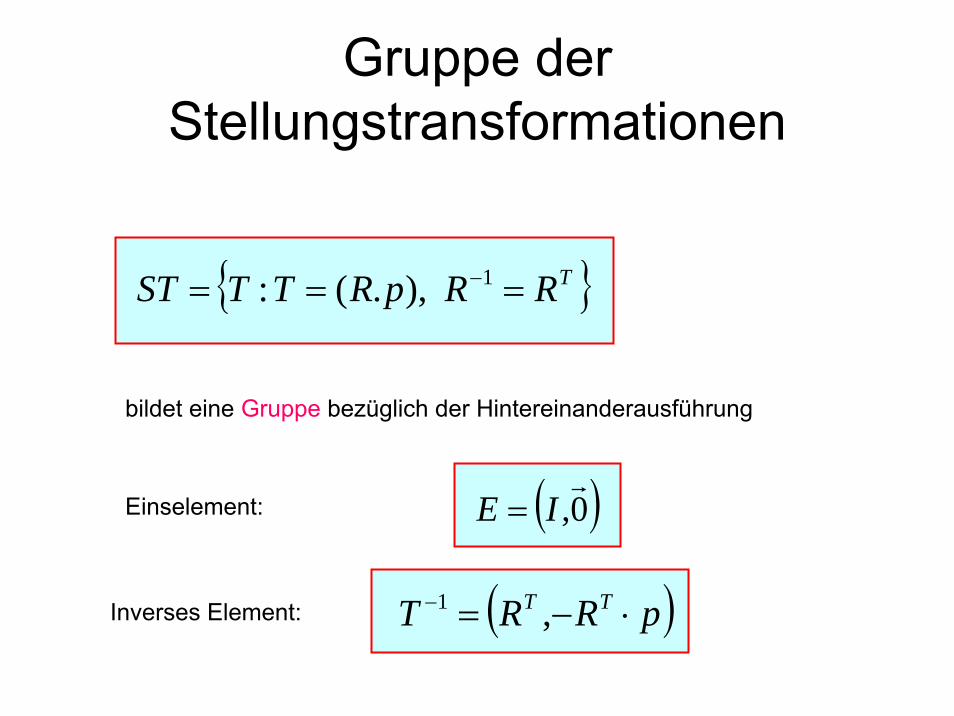
Gruppe der Stellungstransformationen
{ }TRRpRTTST === −1 ),.(:
bildet eine Gruppe bezüglich der Hintereinanderausführung
Einselement:
Inverses Element:
( )0,r
IE =
( )pRRT TT ⋅−=− ,1
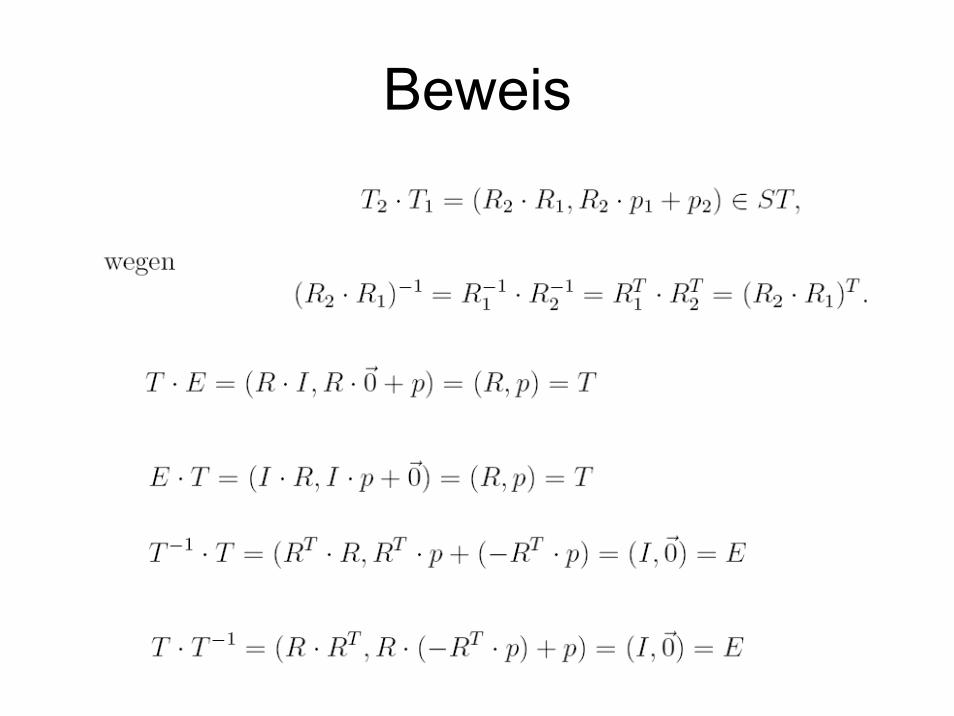
Beweis
4.5 Homogene Koordinaten und homogene
Transformationsmatrizen
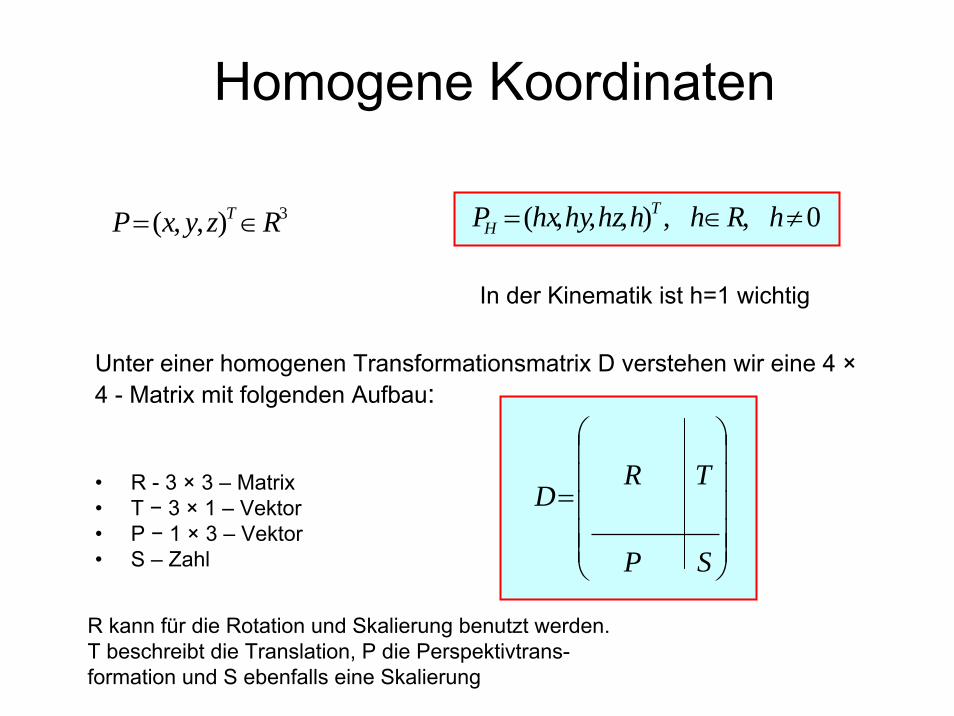
Homogene Koordinaten
3),,( RzyxP T ∈= 0,,),,,( ≠∈= hRhhhzhyhxP TH
Unter einer homogenen Transformationsmatrix D verstehen wir eine 4 ×4 - Matrix mit folgenden Aufbau:
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
SP
TRD• R - 3 × 3 – Matrix
• T − 3 × 1 – Vektor• P − 1 × 3 – Vektor• S – Zahl
R kann für die Rotation und Skalierung benutzt werden.T beschreibt die Translation, P die Perspektivtrans-formation und S ebenfalls eine Skalierung
In der Kinematik ist h=1 wichtig
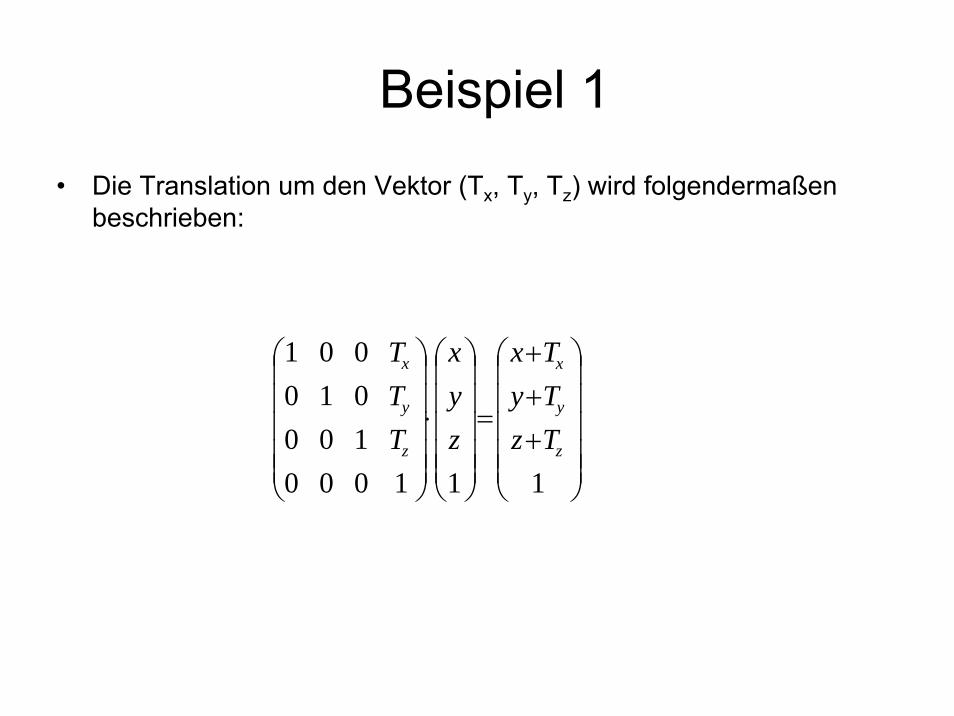
Beispiel 1• Die Translation um den Vektor (Tx, Ty, Tz) wird folgendermaßen
beschrieben:
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
+++
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⋅
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
111000100010001
z
y
x
z
y
x
TzTyTx
zyx
TTT
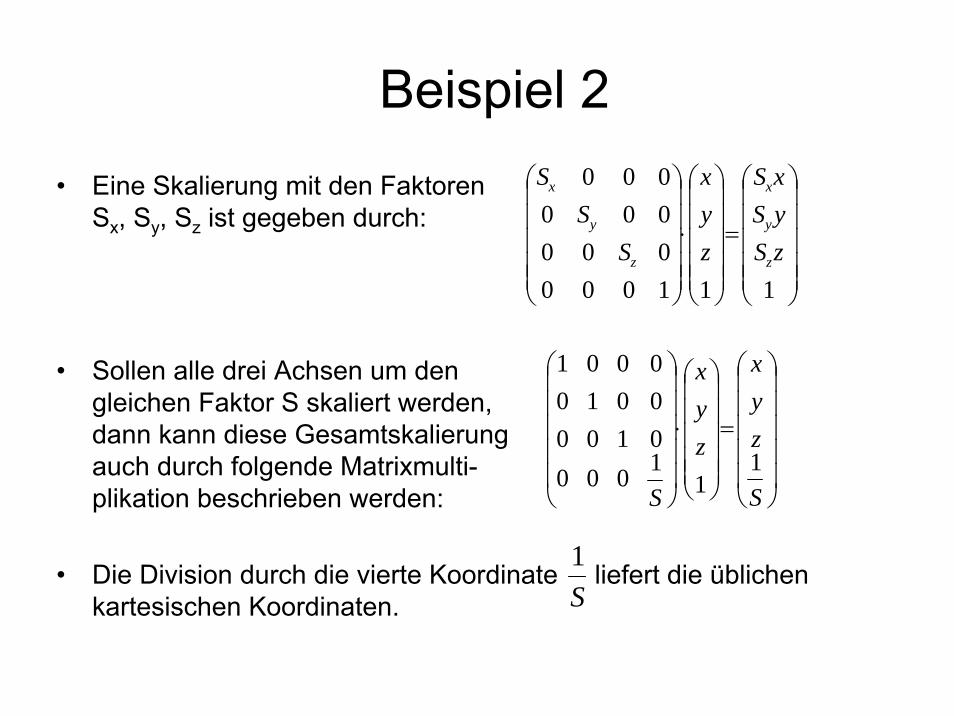
Beispiel 2• Eine Skalierung mit den Faktoren
Sx, Sy, Sz ist gegeben durch:
• Sollen alle drei Achsen um den gleichen Faktor S skaliert werden,dann kann diese Gesamtskalierung auch durch folgende Matrixmulti-plikation beschrieben werden:
• Die Division durch die vierte Koordinate liefert die üblichen kartesischen Koordinaten.
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⋅
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
111000000000000
zSySxS
zyx
SS
S
z
y
x
z
y
x
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⋅
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
S
zyx
zyx
S1
11000010000100001
S1
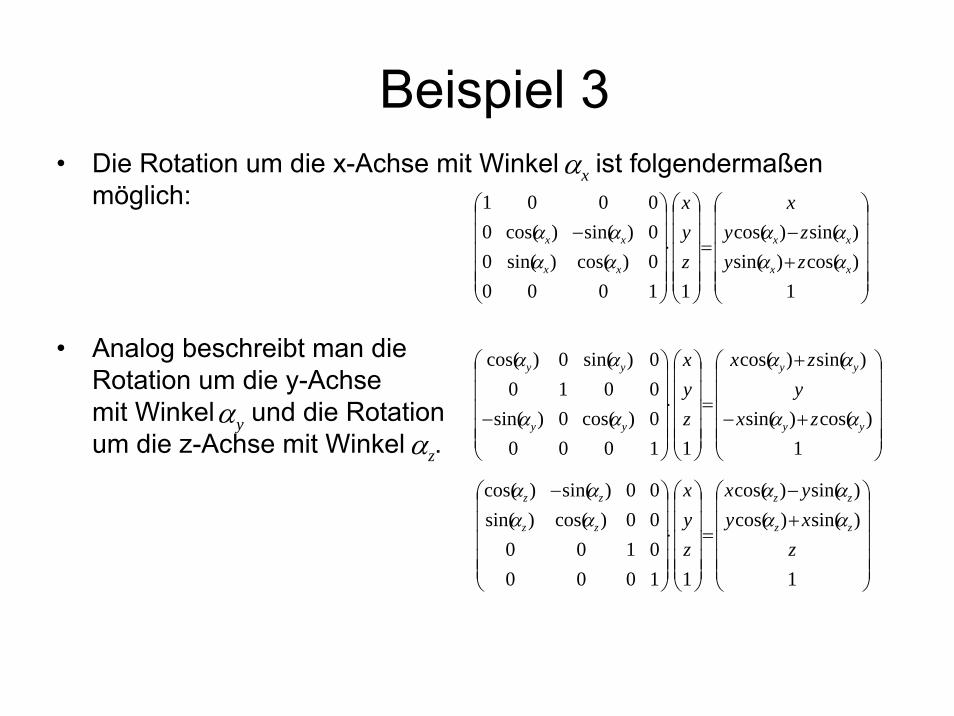
Beispiel 3• Die Rotation um die x-Achse mit Winkel ist folgendermaßen
möglich:
• Analog beschreibt man dieRotation um die y-Achse mit Winkel und die Rotationum die z-Achse mit Winkel .
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
+−
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⋅
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛−
1)cos()sin()sin()cos(
110000)cos()sin(00)sin()cos(00001
xx
xx
xx
xx
zyzy
x
zyx
αααα
αααα
xα
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
+−
+
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⋅
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
−1
)cos()sin(
)sin()cos(
110000)cos(0)sin(00100)sin(0)cos(
yy
yy
yy
yy
zxy
zx
zyx
αα
αα
αα
αα
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛+−
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⋅
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛ −
1
)sin()cos()sin()cos(
11000010000)cos()sin(00)sin()cos(
zxyyx
zyx
zz
zz
zz
zz
αααα
αααα
yαzα
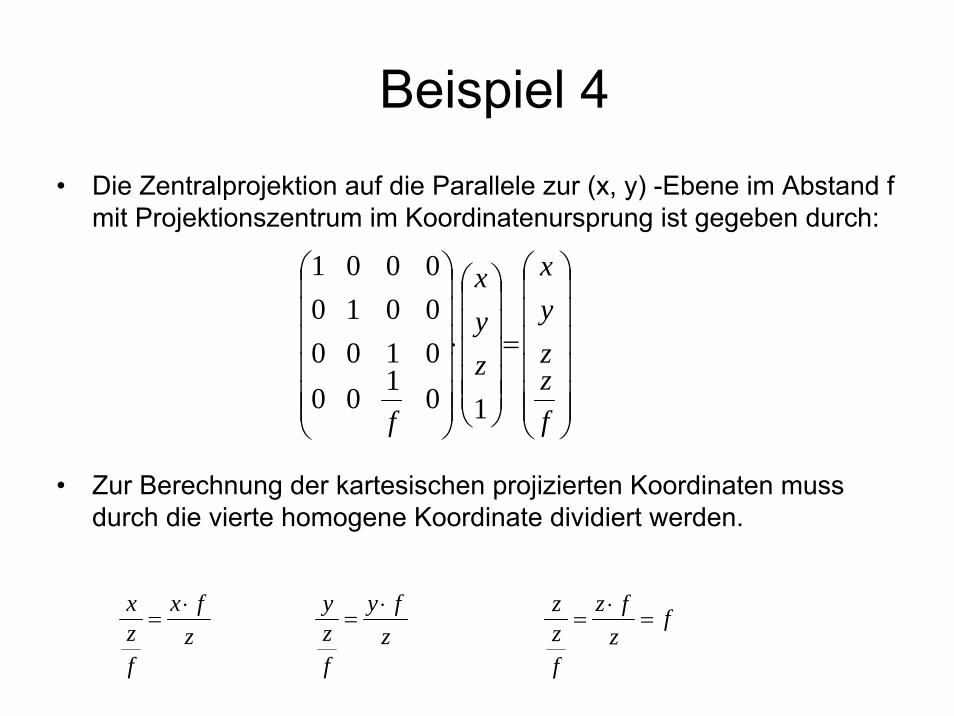
Beispiel 4• Die Zentralprojektion auf die Parallele zur (x, y) -Ebene im Abstand f
mit Projektionszentrum im Koordinatenursprung ist gegeben durch:
• Zur Berechnung der kartesischen projizierten Koordinaten muss durch die vierte homogene Koordinate dividiert werden.
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⋅
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
fzzyx
zyx
f 10100010000100001
zfx
fzx ⋅=
zfy
fzy ⋅= f
zfz
fzz
=⋅
=
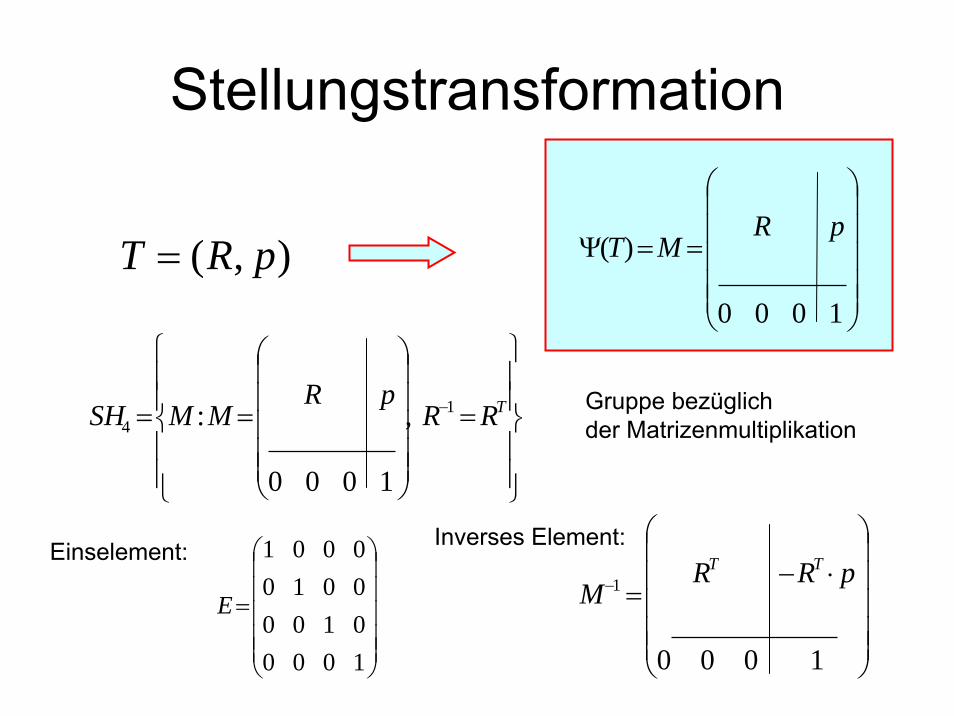
Stellungstransformation
),( pRT =⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
==Ψ
1000
)(pR
MT
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
== − TRRpR
MMSH 14 ,
1000
: Gruppe bezüglich der Matrizenmultiplikation
Einselement: Inverses Element:
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
1000010000100001
E
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛⋅−
=−
1000
1 pRRM
TT
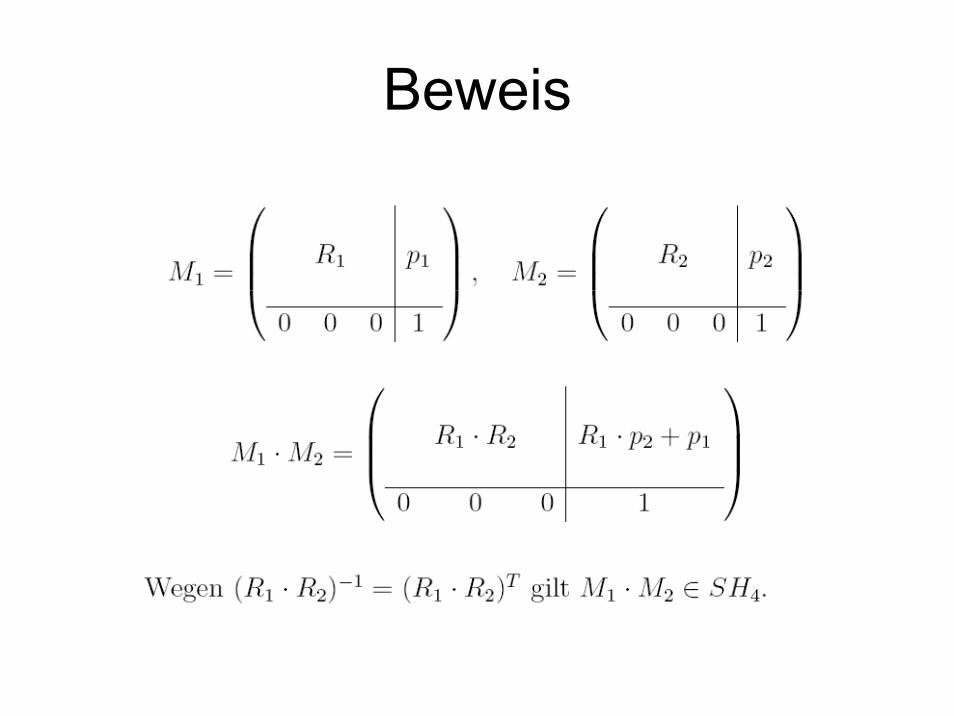
Beweis
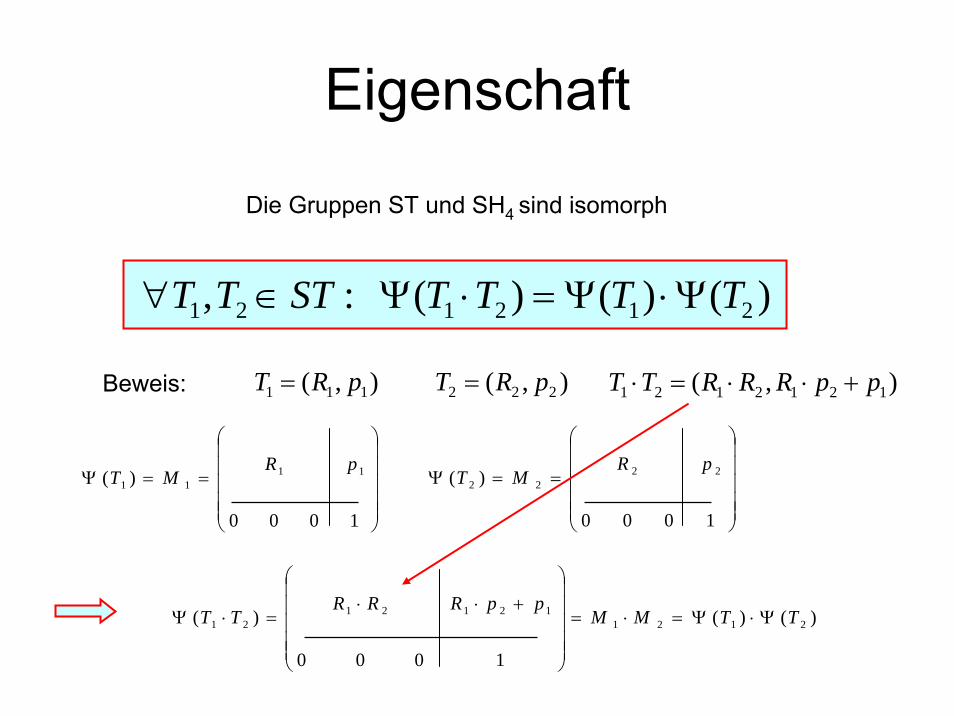
Eigenschaft
Die Gruppen ST und SH4 sind isomorph
)()()( :, 212121 TTTTSTTT Ψ⋅Ψ=⋅Ψ∈∀
),( 111 pRT = ),( 222 pRT =Beweis:
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
==Ψ
1000
)( 1111
pRMT
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
==Ψ
1000
)( 2222
pRMT
),( 1212121 ppRRRTT +⋅⋅=⋅
)()(
1000
)( 212112121
21 TTMMppRRR
TT Ψ⋅Ψ=⋅=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛+⋅⋅
=⋅Ψ
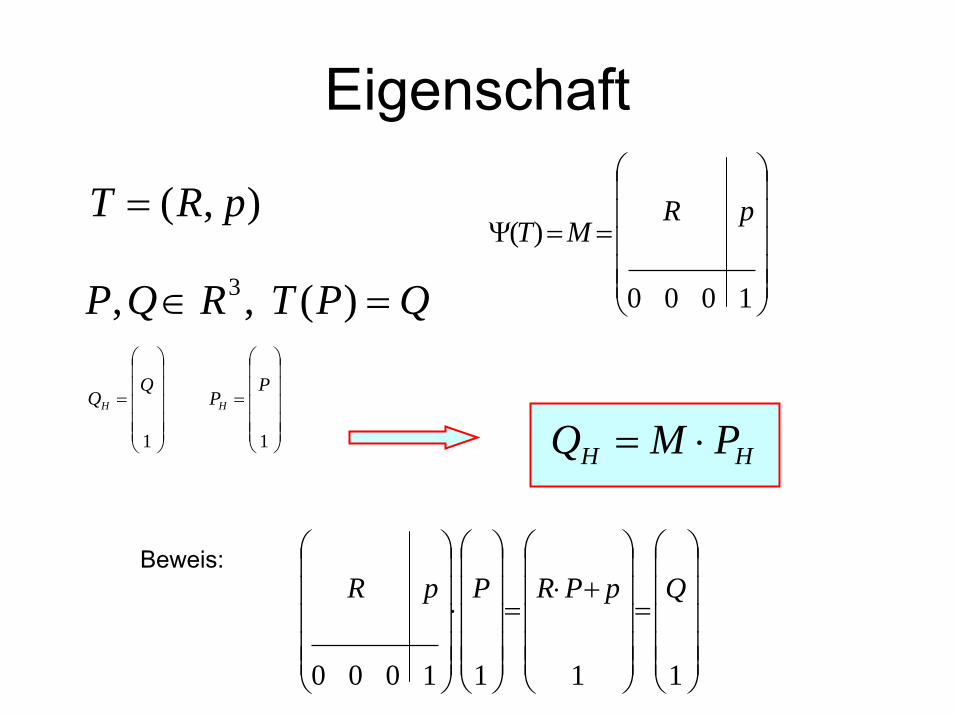
Eigenschaft
),( pRT =
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
==Ψ
1000
)(pR
MT
QPTRQP =∈ )( ,, 3
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
1
QQH
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
1
PPH
HH PMQ ⋅=
Beweis:
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛+⋅
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⋅
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
1111000
QpPRPpR
Bemerkungen
• Die Gruppen ST und SH4 sind nicht kommutativ• Das Resultat von Stellungstransformationen
kann mit homogenen Koordinaten berechnet werden
• Die Hintereinanderausführung von Stellungstransformationen kann auf die Multiplikation von Matrizen zurückgeführt werden
4.6 Beschreibung der Roboterkinematik nach
Denavit-Hartenberg
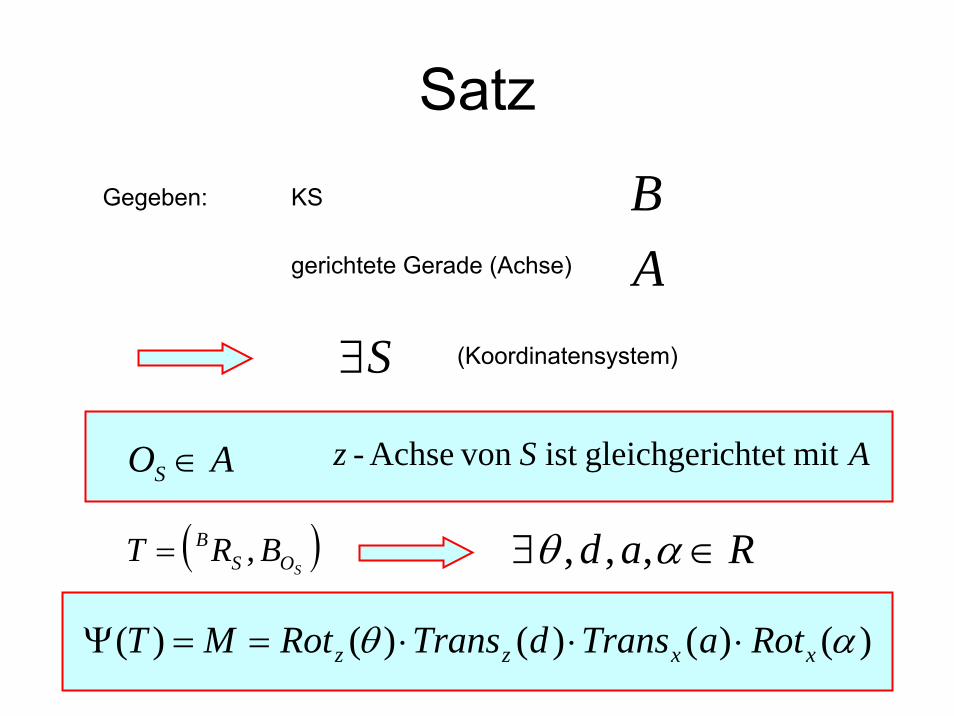
SatzGegeben: KS B
gerichtete Gerade (Achse) A
S∃ (Koordinatensystem)
AOS ∈ ASz mit chtet gleichgeriist von Achse-
( )SOS
B BRT ,=
)()()()()( αθ xxzz RotaTransdTransRotMT ⋅⋅⋅==Ψ
Rad ∈∃ αθ ,,,
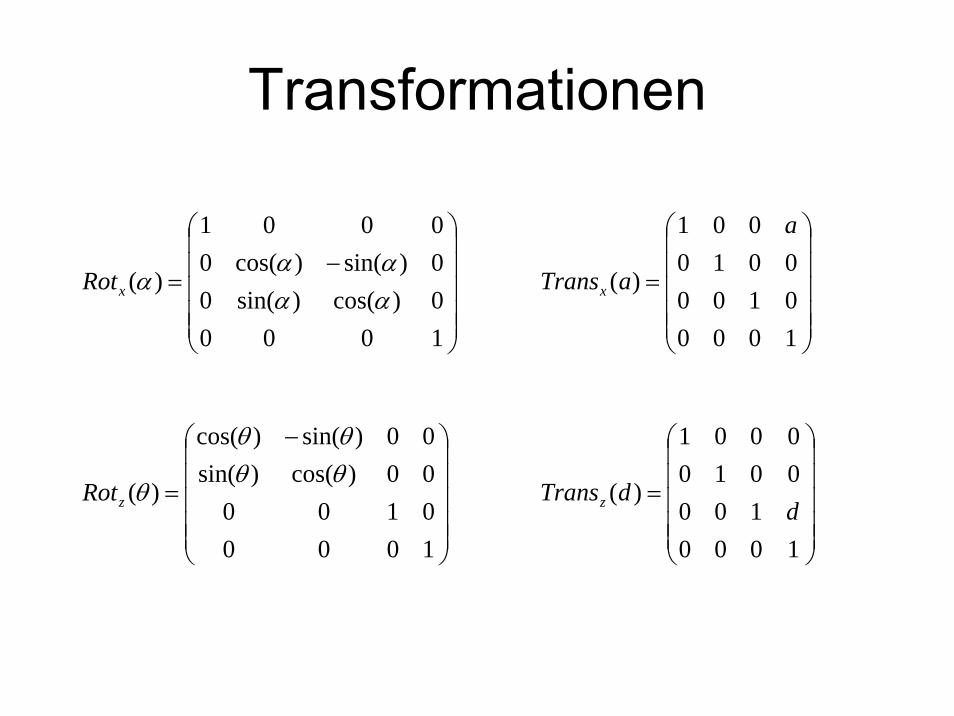
Transformationen
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛−
=
10000)cos()sin(00)sin()cos(00001
)(αααα
αxRot
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛ −
=
1000010000)cos()sin(00)sin()cos(
)(θθθθ
θzRot
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
1000100
00100001
)(d
dTransz
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
100001000010
001
)(
a
aTransx
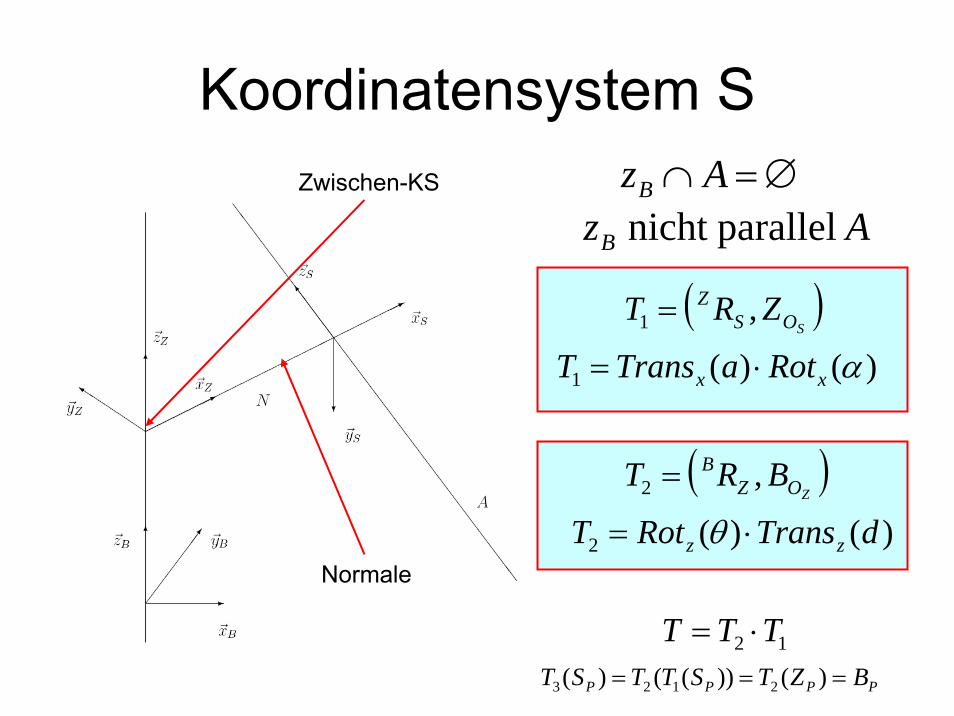
Koordinatensystem S∅=∩ AzB
AzB parallelnicht
Normale
Zwischen-KS
( )SOS
Z ZRT ,1 =
)()(1 αxx RotaTransT ⋅=
( )ZOZ
B BRT ,2 =
)()(2 dTransRotT zz ⋅= θ
12 TTT ⋅=PPPP BZTSTTST === )())(()( 2123
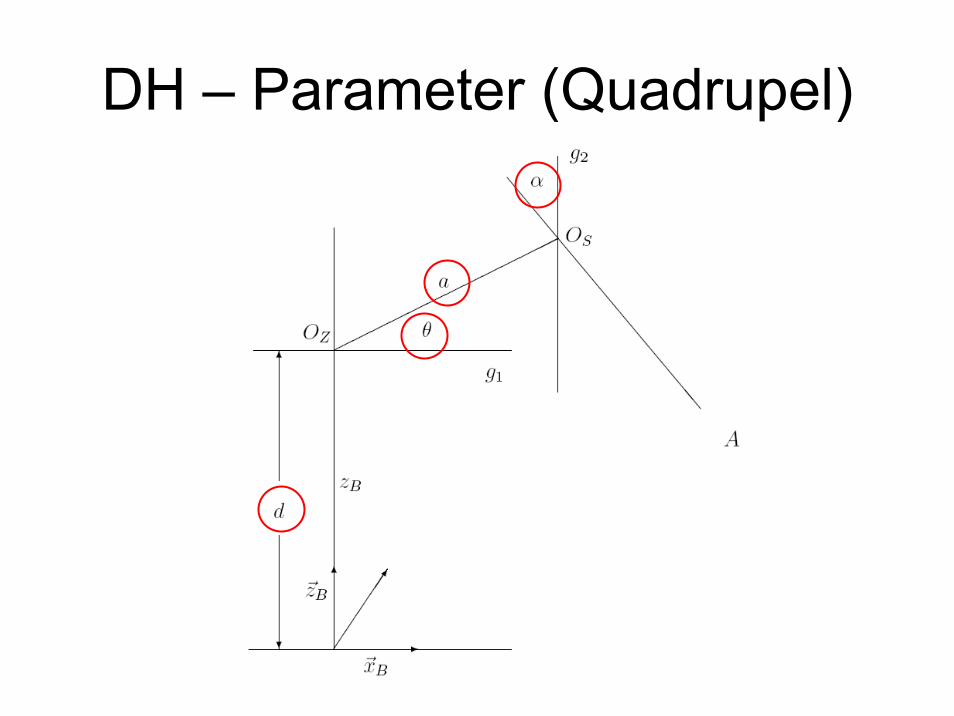
DH – Parameter (Quadrupel)
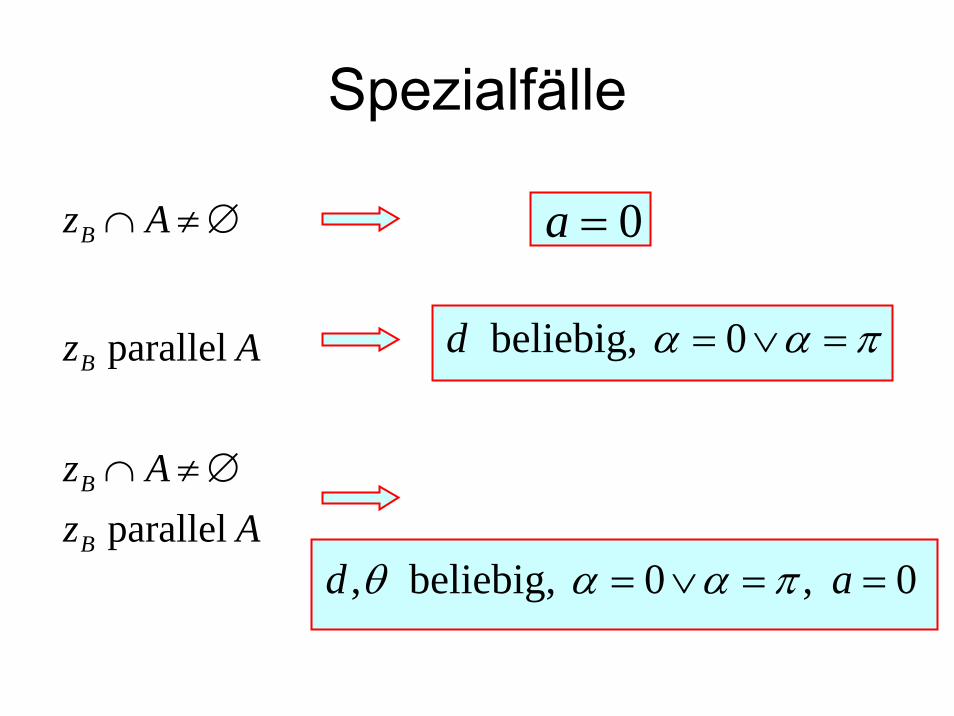
Spezialfälle
∅≠∩ AzB 0=a
AzB parallel παα =∨= 0 beliebig, d
∅≠∩ AzB
AzB parallel 0 ,0 beliebig, , ==∨= ad πααθ
Anwendung auf Roboter
• offene kinematische Kette• n Gelenke• beliebiges festes KS B=S0, bezüglich
dessen die Roboterbasis unbeweglich ist• im Effektor sei ein KS E=Sn+2 gegeben• die Gelenkachsen seien von der
Roboterbasis beginnend, von A1 bis Andurchnumeriert
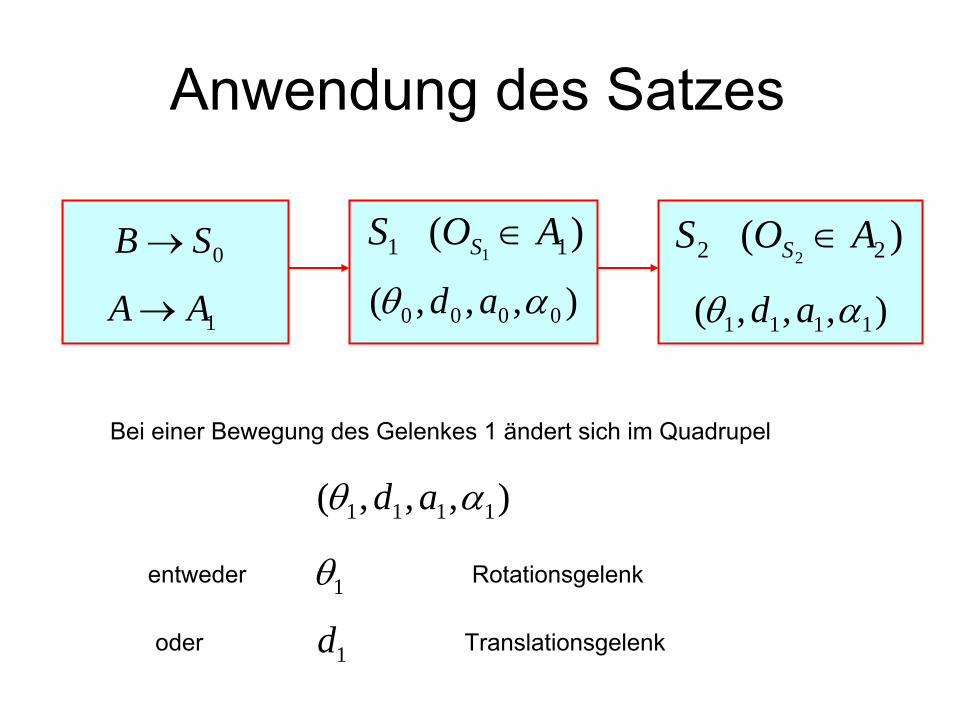
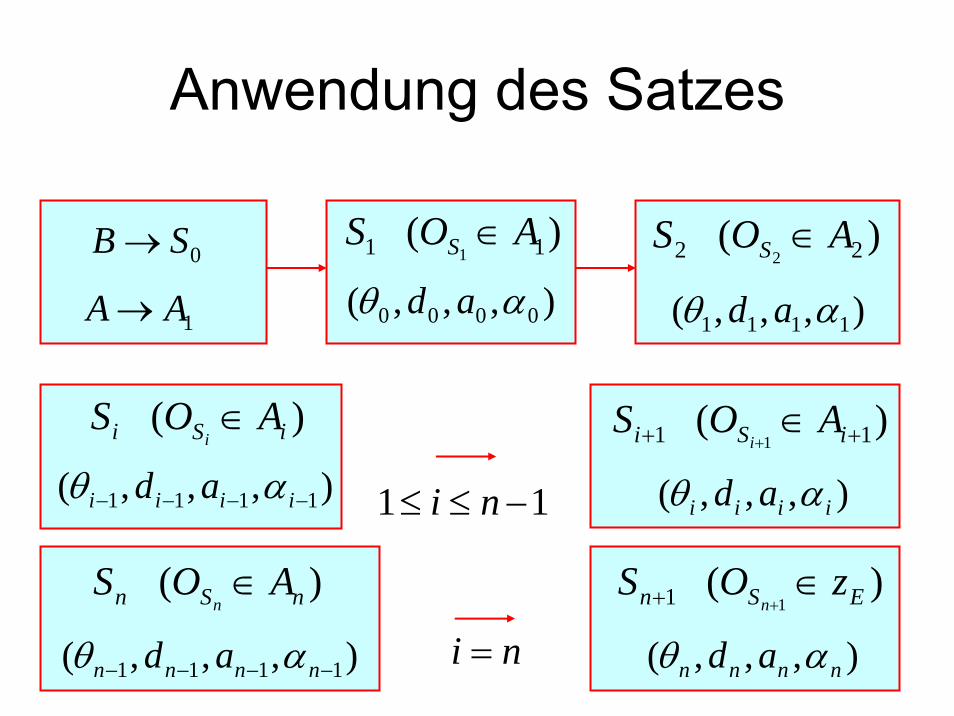
Anwendung des Satzes
0SB →
1AA→
)( 11 1AOS S ∈
),,,( 0000 αθ ad
)( 22 2AOS S ∈
),,,( 1111 αθ ad
Bei einer Bewegung des Gelenkes 1 ändert sich im Quadrupel
),,,( 1111 αθ ad
entweder 1θ
1doder
Rotationsgelenk
Translationsgelenk
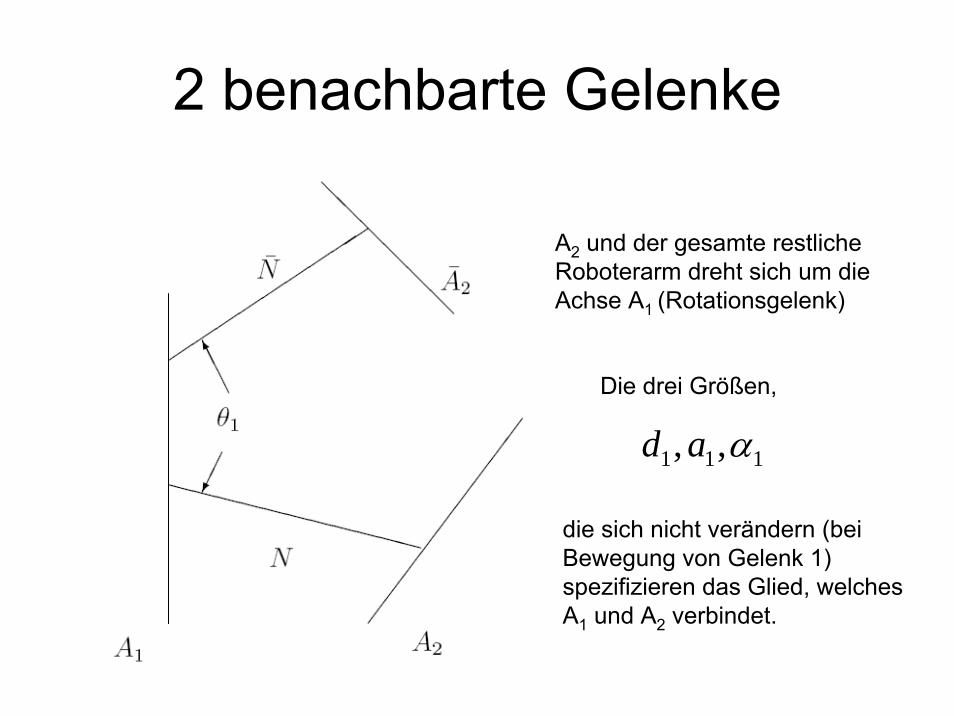
2 benachbarte Gelenke
A2 und der gesamte restliche Roboterarm dreht sich um die Achse A1 (Rotationsgelenk)
Die drei Größen,
111 ,, αad
die sich nicht verändern (beiBewegung von Gelenk 1)spezifizieren das Glied, welchesA1 und A2 verbindet.
Anwendung des Satzes
0SB →
1AA→
)( 11 1AOS S ∈
),,,( 0000 αθ ad
)( 22 2AOS S ∈
),,,( 1111 αθ ad
)( iSi AOSi∈
),,,( 1111 −−−− iiii ad αθ
)( 11 1 ++ ∈+ iSi AOS
i
),,,( iiii ad αθ11 −≤≤ ni
)( nSn AOSn∈
),,,( 1111 −−−− nnnn ad αθ
)( 11 ESn zOS
n∈
++
),,,( nnnn ad αθni =
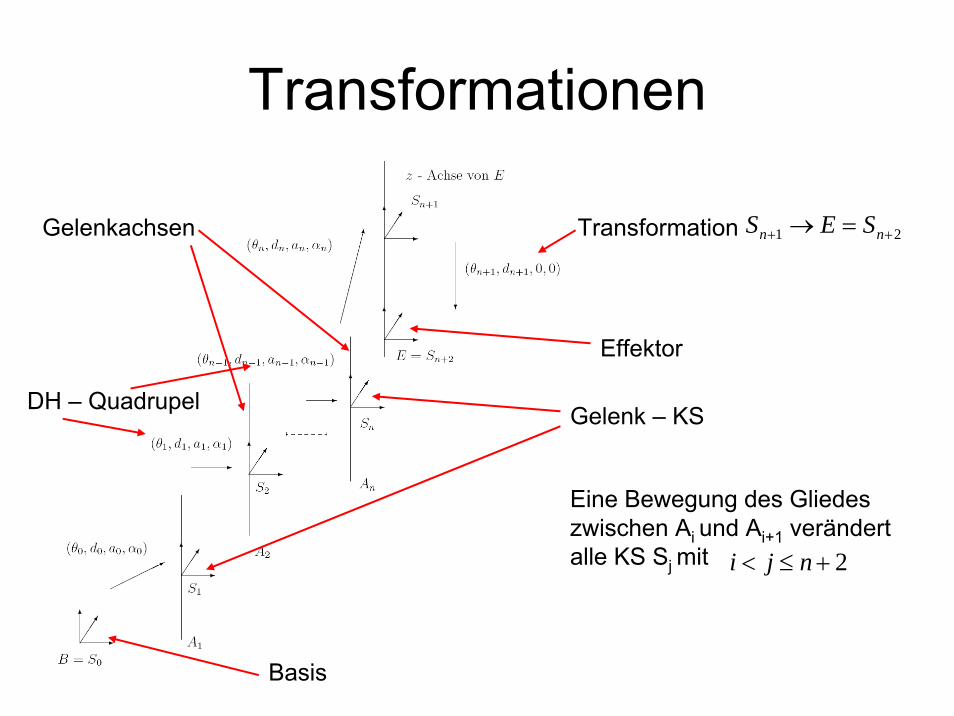
Transformationen
Gelenkachsen
Basis
Gelenk – KS
Transformation 21 ++
Effektor
=→ nn SES
Eine Bewegung des Gliedeszwischen Ai und Ai+1 verändertalle KS Sj mit 2+≤< nji
DH – Quadrupel
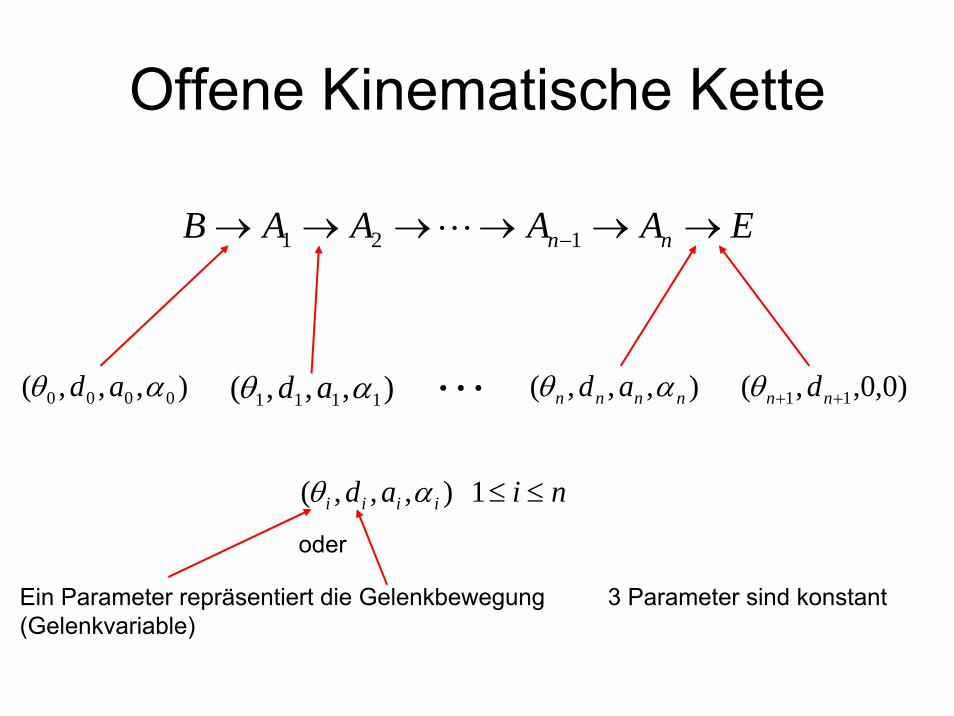
Offene Kinematische Kette
EAAAAB nn →→→→→→ −121 L
),,,( 0000 αθ ad ),,,( 1111 αθ ad ),,,( nnnn ad αθ )0,0,,( 11 ++ nn dθL
niad iiii ≤≤1 ),,,( αθ
3 Parameter sind konstantEin Parameter repräsentiert die Gelenkbewegung(Gelenkvariable)
oder
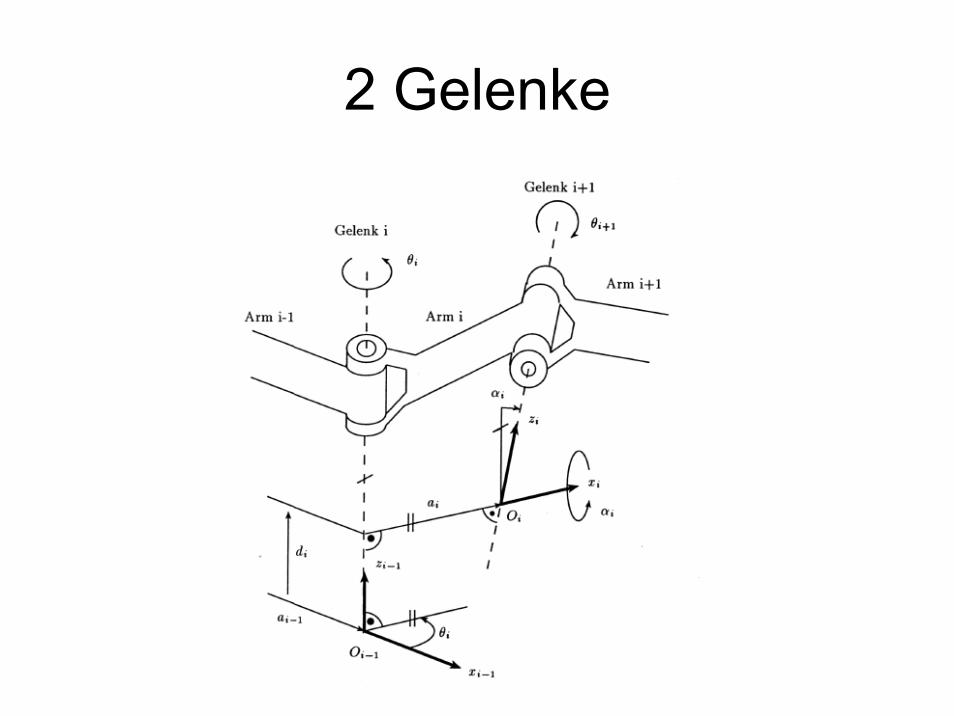
2 Gelenke
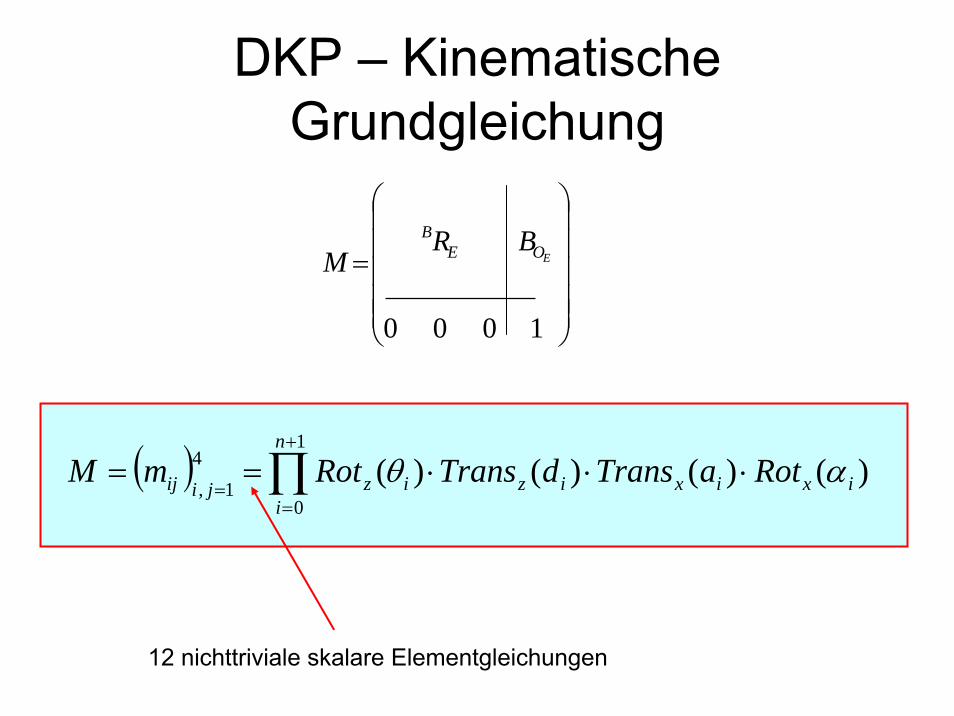
DKP – Kinematische Grundgleichung
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
1000
EOEB BR
M
( ) ∏+
==
⋅⋅⋅==1
0
41,
)()()()(n
iixixizizjiij RotaTransdTransRotmM αθ
12 nichttriviale skalare Elementgleichungen
Bemerkungen
• können die DH – Parameter beliebig gewählt werden, so setzt man sie i. a. gleich 0
• die Gelenkübergänge werden einheitlich beschrieben
• die Bewegung des Gelenkes wird nur durch einen Parameter modifiziert
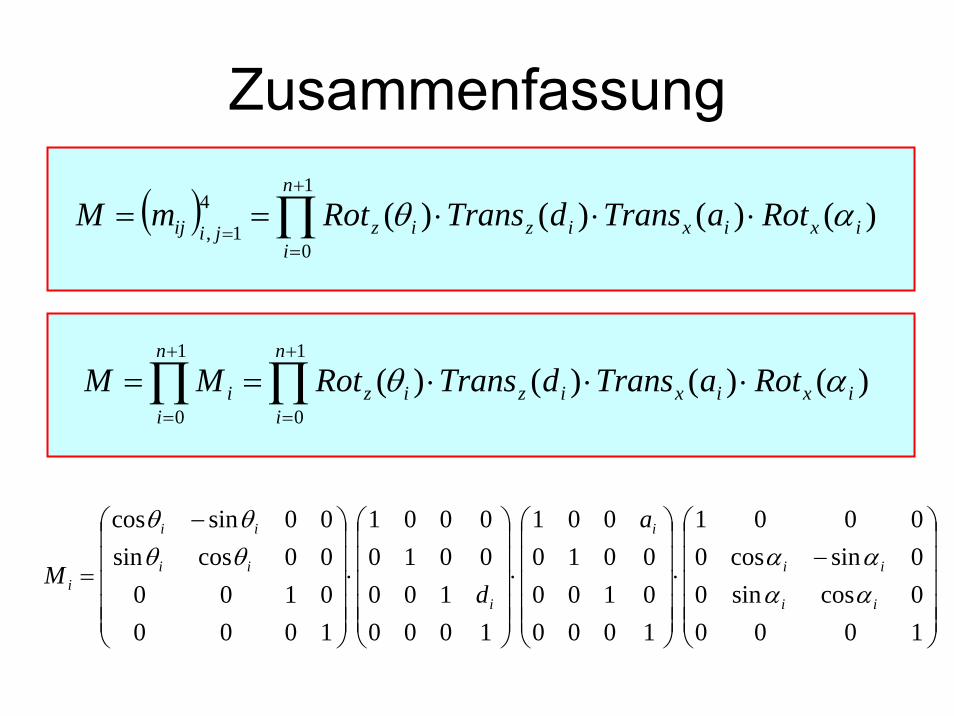
Zusammenfassung
( ) ∏+
==
⋅⋅⋅==1
0
41,
)()()()(n
iixixizizjiij RotaTransdTransRotmM αθ
∏∏+
=
+
=
⋅⋅⋅==1
0
1
0
)()()()(n
iixixiziz
n
ii RotaTransdTransRotMM αθ
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛−
⋅
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⋅
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⋅
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛ −
=
10000cossin00sincos00001
100001000010
001
1000100
00100001
1000010000cossin00sincos
ii
ii
i
i
ii
ii
i
a
dM
ααααθθ
θθ
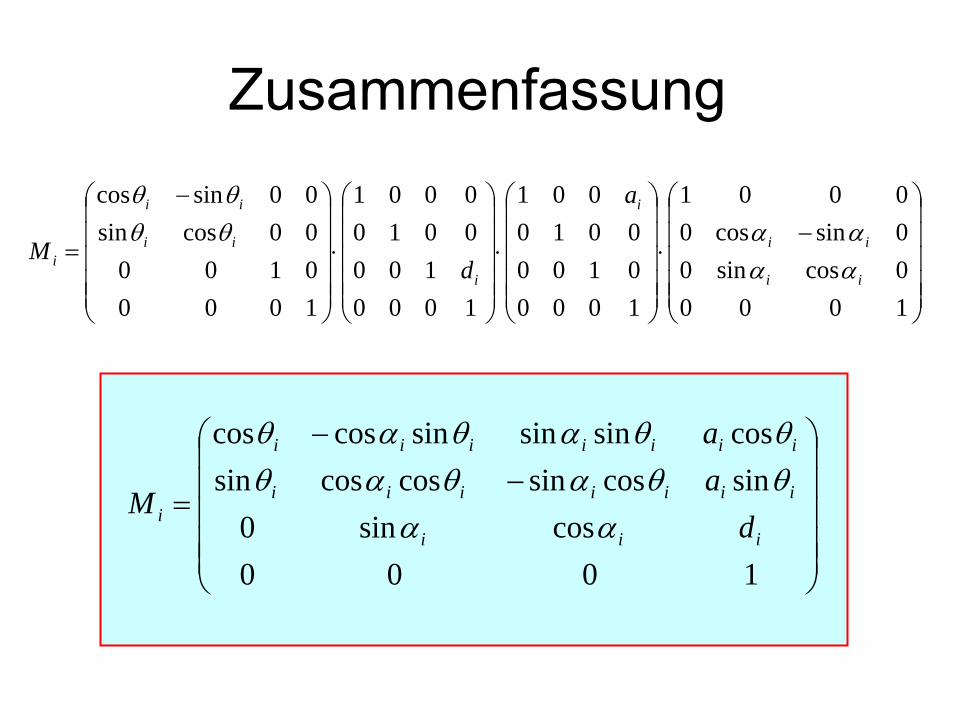
Zusammenfassung
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛−
⋅
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⋅
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⋅
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛ −
=
10000cossin00sincos00001
100001000010
001
1000100
00100001
1000010000cossin00sincos
ii
ii
i
i
ii
ii
i
a
dM
ααααθθ
θθ
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛−
−
=
1000cossin0
sincossincoscossincossinsinsincoscos
iii
iiiiiii
iiiiiii
i daa
Mαα
θθαθαθθθαθαθ
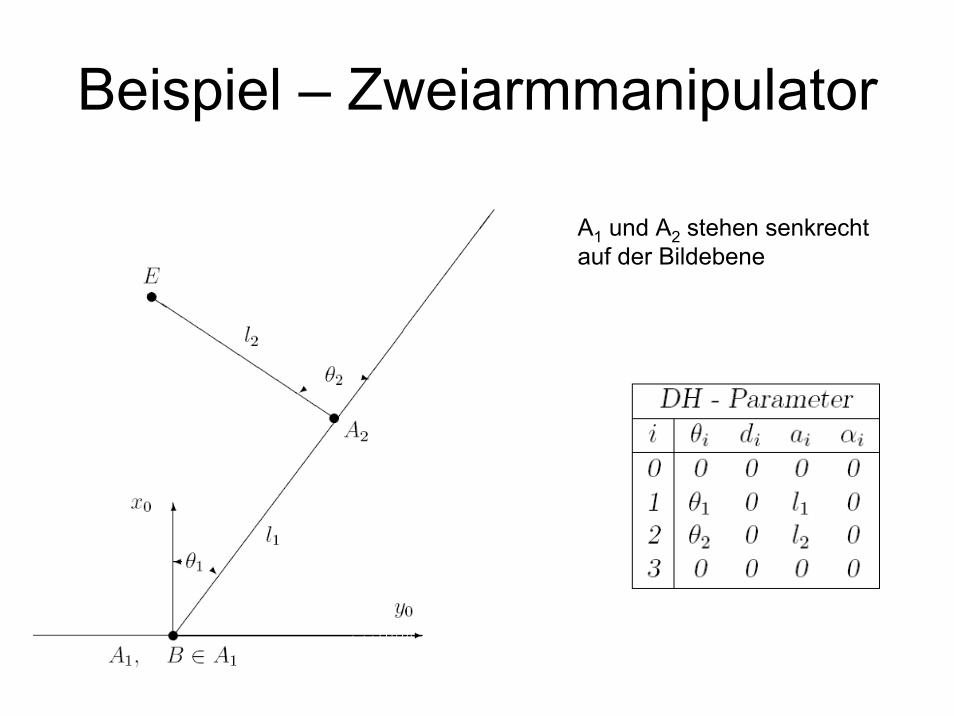
Beispiel – Zweiarmmanipulator
A1 und A2 stehen senkrecht auf der Bildebene
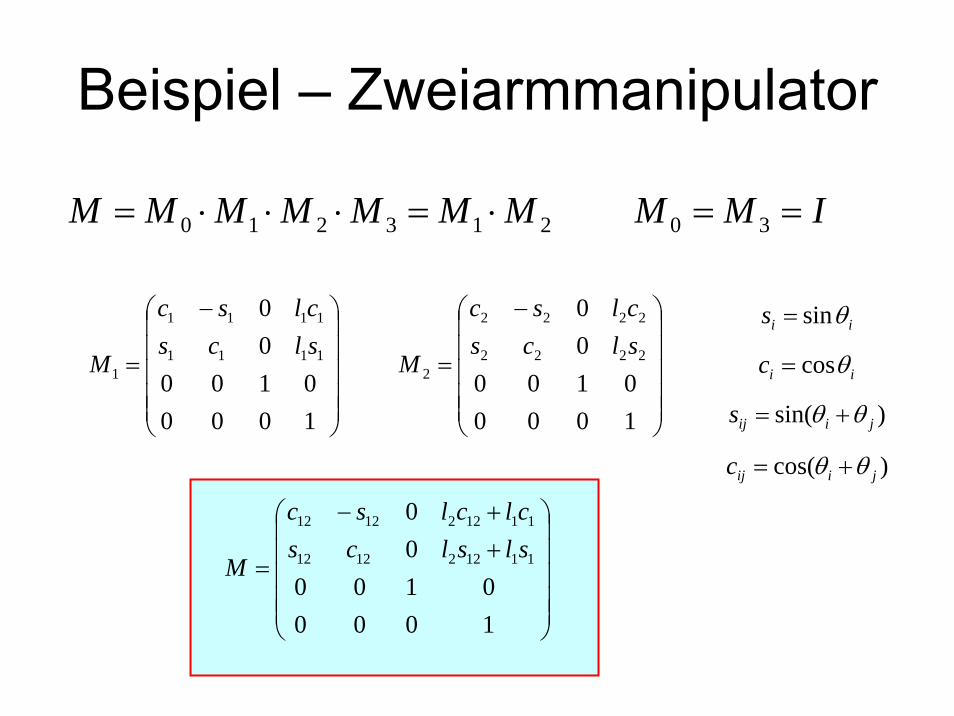
Beispiel – Zweiarmmanipulator
213210 MMMMMMM ⋅=⋅⋅⋅= IMM == 30
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛ −
=
10000100
00
1111
1111
1
slcsclsc
M
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛ −
=
10000100
00
2222
2222
2
slcsclsc
M
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛++−
=
10000100
00
111221212
111221212
slslcsclclsc
M
iis θsin=
iic θcos=
)sin( jiijs θθ +=
)cos( jiijc θθ +=
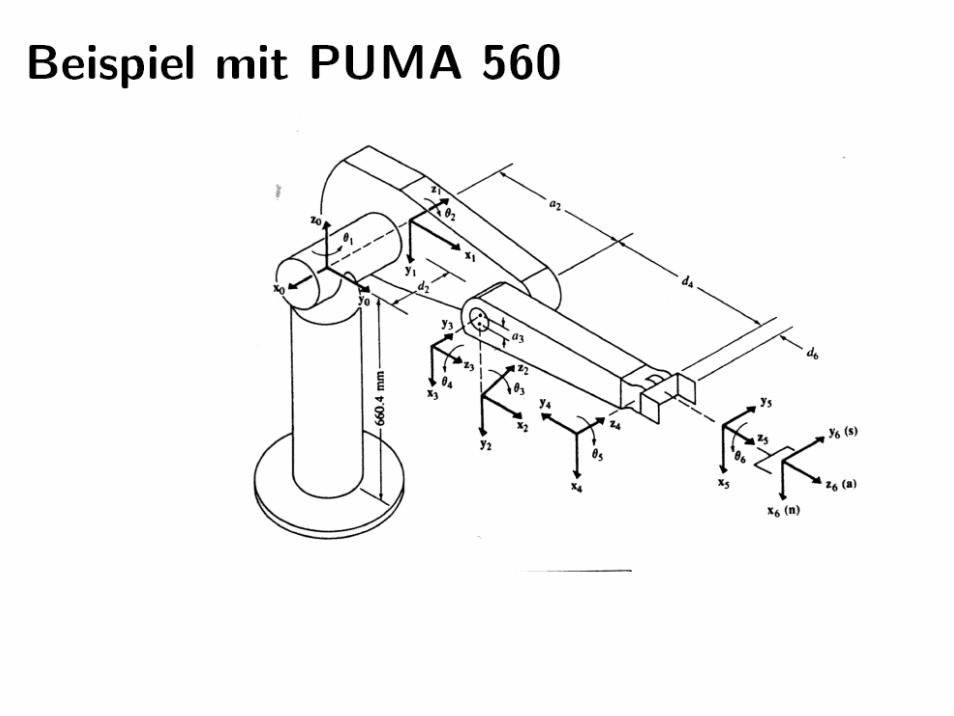
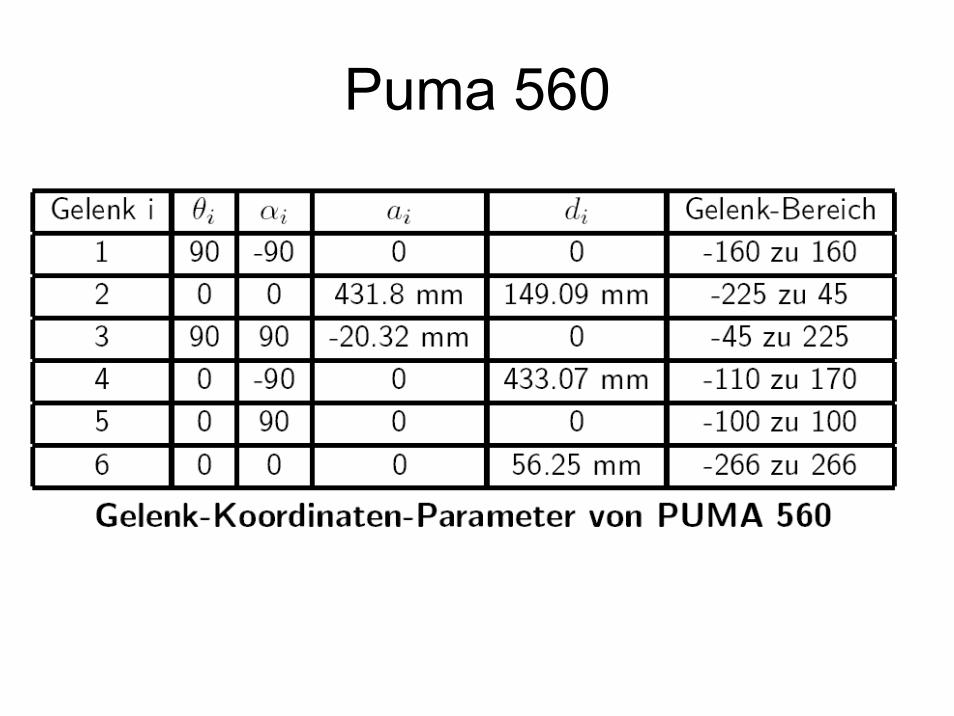
Puma 560
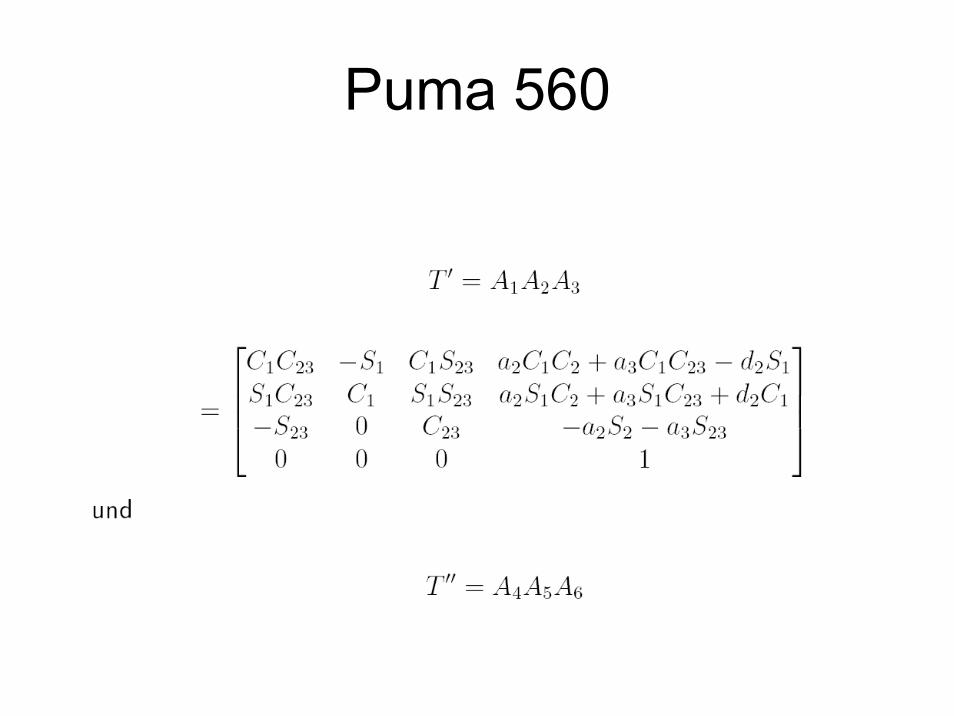
Puma 560
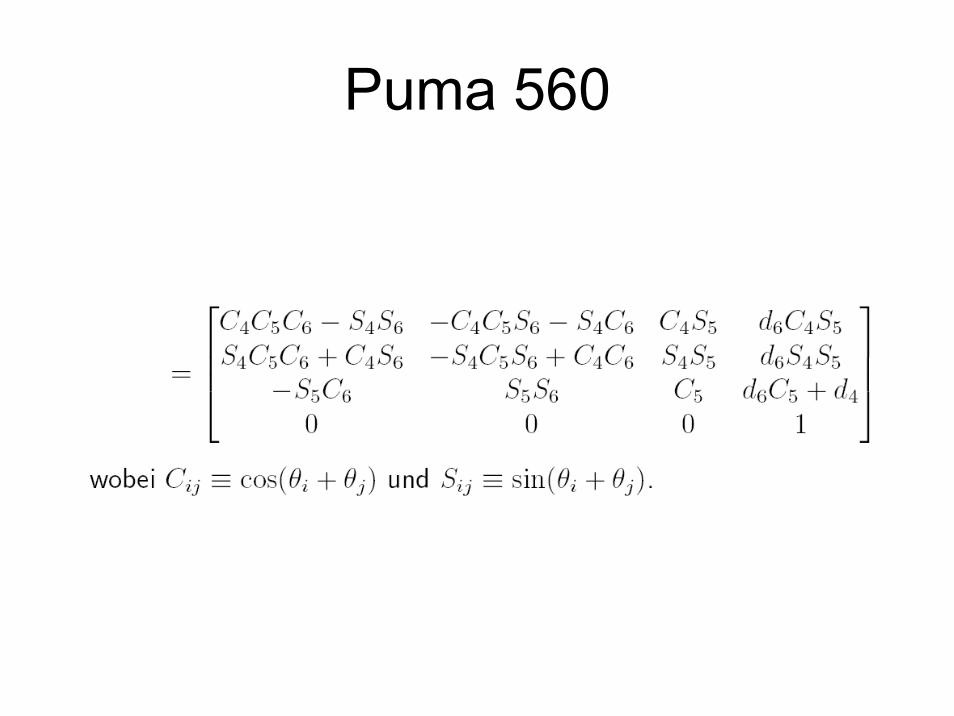
Puma 560
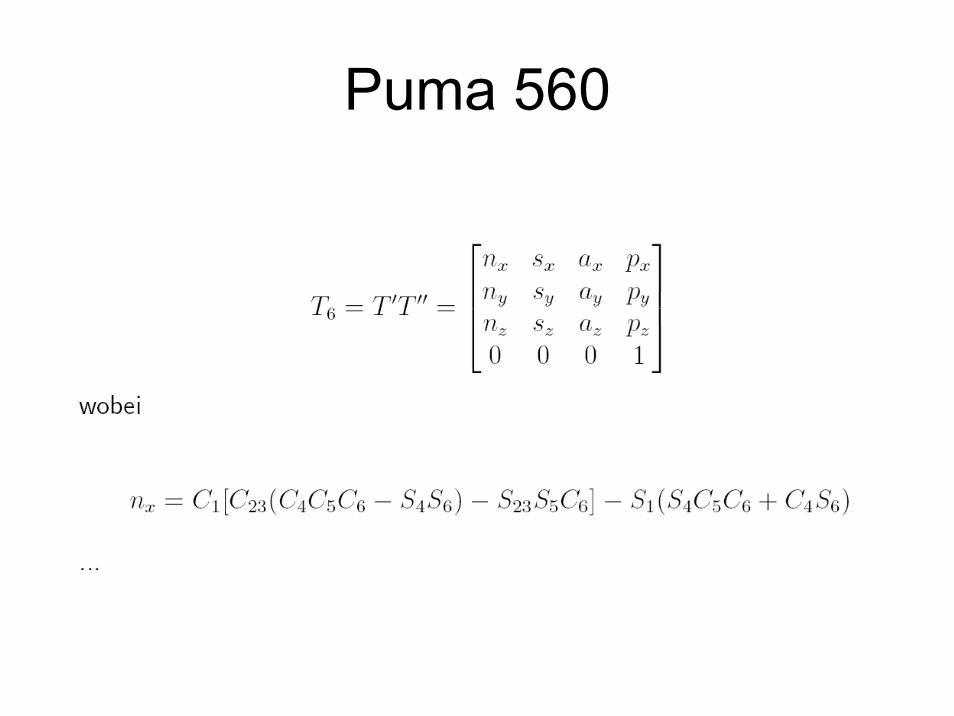
Puma 560
4.7 Inverse kinematische Transformation (IKP)
Inverse kinematische Transformation (IKP)
Gegeben:
Gesucht:
Lage zwischen Effektor und Roboterbasis
Gelenkparameter
( ) ∏+
====
1
0
41,
n
iijiij MmM
nidii ≤≤1 bzw. θ
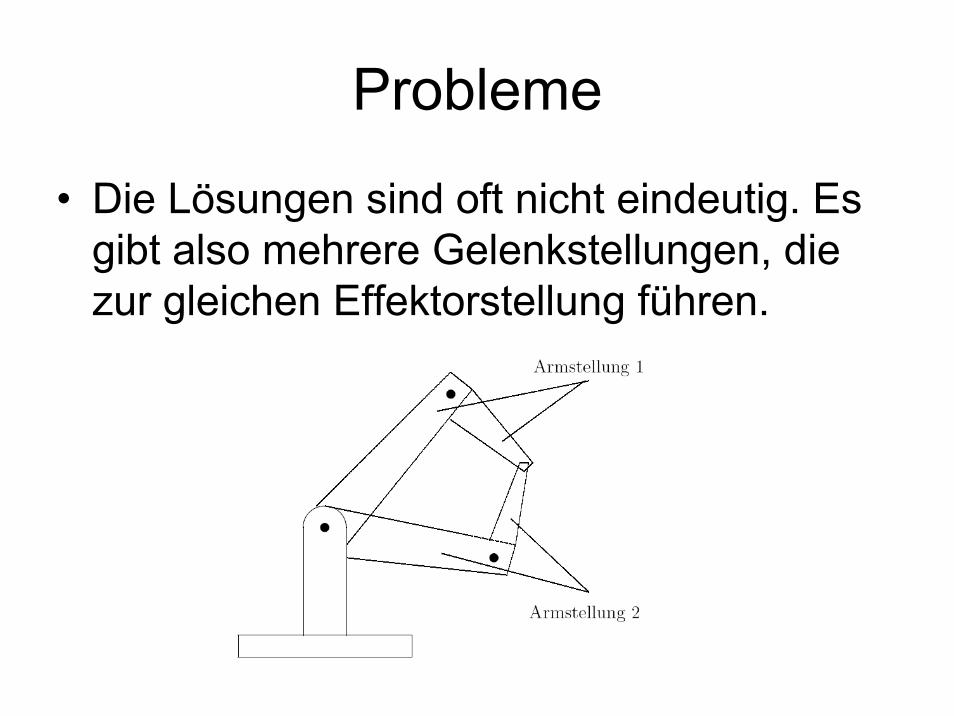
Probleme
• Die Lösungen sind oft nicht eindeutig. Es gibt also mehrere Gelenkstellungen, die zur gleichen Effektorstellung führen.
Probleme• Die gefundene mathematische Lösung kann
eine unzulässige Stellung ergeben.– ein Winkel ist aufgrund mechanischer Begrenzungen
nicht einstellbar– Glieder des Armes kollidieren mit Hindernissen
• unzulässige Zwischenstellung bei einer Bewegung von der Ist-Stellung zur neuen Soll-Stellung
• für die Rückwärtsberechnung existiert kein allgemeines Verfahren
• schnelle Berechnung notwendig (während der Bewegung des Roboters)
Berechnungsmöglichkeiten
• analytische Verfahren– expliziter Zusammenhang zwischen den
Gelenkparametern und den Elementen der Matrix M(einfache Gelenkanordnung)
• roboterspezifische Vorgehensweise– Formeln für die Rückwärtsrechnung lassen sich
geschlossen angeben– keine Rechnung über die Transformationsmatrizen
erforderlich• Näherungsverfahren
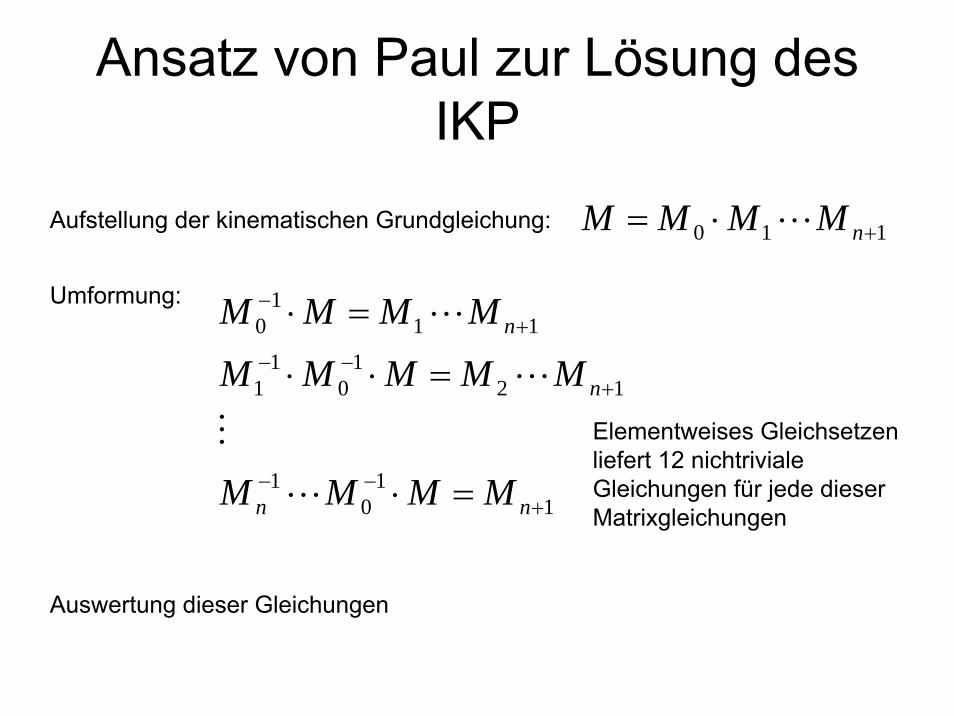
Ansatz von Paul zur Lösung des IKP
Aufstellung der kinematischen Grundgleichung:
Umformung:
Elementweises Gleichsetzenliefert 12 nichtrivialeGleichungen für jede dieser Matrixgleichungen
110 +⋅= nMMMM L
11
01
121
01
1
111
0
+−−
+−−
+−
=⋅
=⋅⋅
=⋅
nn
n
n
MMMM
MMMMM
MMMM
L
M
L
L
Auswertung dieser Gleichungen
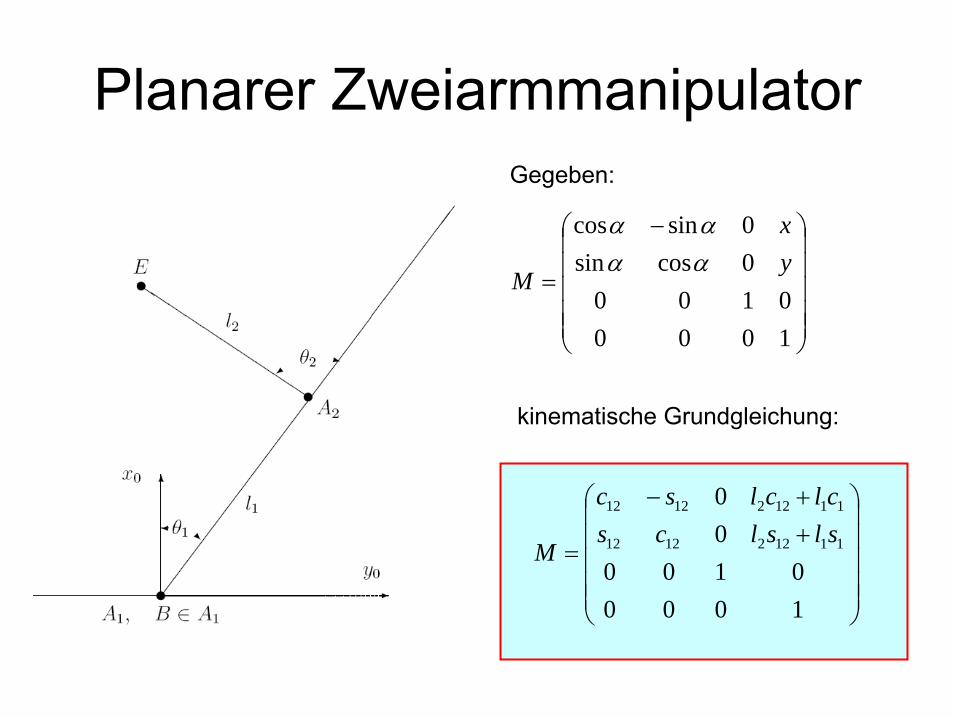
Planarer Zweiarmmanipulator
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛++−
=
10000100
00
111221212
111221212
slslcsclclsc
M
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛ −
=
10000100
0cossin0sincos
yx
Mαααα
Gegeben:
kinematische Grundgleichung:
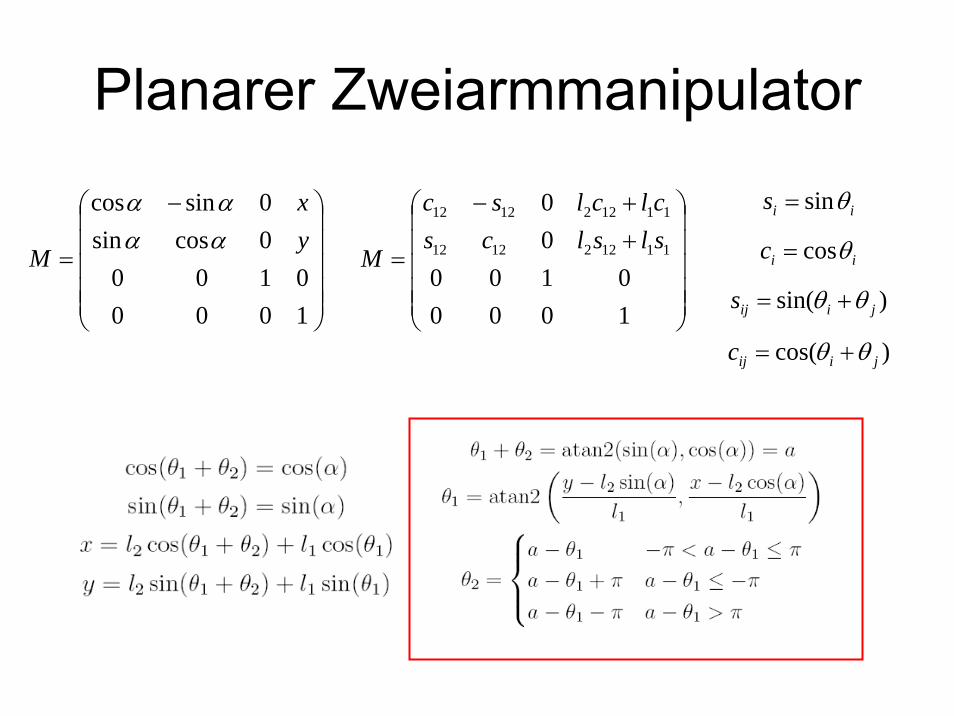
Planarer Zweiarmmanipulator
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛ −
=
10000100
0cossin0sincos
yx
Mαααα
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛++−
=
10000100
00
111221212
111221212
slslcsclclsc
M
iis θsin=
iic θcos=
)sin( jiijs θθ +=
)cos( jiijc θθ +=