roban 3 achs gyro bedienungsanleitung · 2013-09-20 · roban 3 achs gyro bedienungsanleitung der...
TRANSCRIPT

ROBAN 3 ACHS GYRO BEDIENUNGSANLEITUNG
Der multifunktionale flybarless 3 Achs Gyro von Roban ist wirkliches Leichtgewicht. Er ist kompatibel mit allen 200-
700er nitro oder elektro-Helis und unterstützt 90, 12, 135, und 140 Grad Taumelscheibenmischung. Ausserdem ist
der kompatibel mit allen auf dem Markt erhältlichen Servos. Die Einrichtung ist sehr einfach und kann innert 10
Minuten vorgenommen werden. Das Gyrosystem arbeitet mit zwei grundsätzlichen Stabilisationsmodi, um Anfänger
sowie Experte gerecht warden zu können. Das Gyrosystem nutzt einen MEMS Sensor welcher unter sehr
ungünsitgen Bedingungen sehr gute Kontrolle über den Helikopter ermöglicht.
1. SPEZIFIKATIONEN
Maße: 37.2mm*25.2mm*13mm
Gewicht: 9.8g
Betriebsspannung: DC 3.5V-9V
Nennstrom: 60mA
Betriebstemperatur: -15℃~65℃
Maximale Winkelgeschwindigkeit: 800 Grad/Sekunde
Heckservo-Kompatibilität: 1.52ms analog Servo, 1.52ms digital Servo, 760us digital, 960us digital
TS-Servo Kompatibilität: 1.52ms analog Servo, 1.52ms digital Servo
Fernsteuerungsmodi: PPM, PCM, 2.4G
Supported: Multi-Blatt Rotorkopf
2. ANSCHLÜSSE
Heckservo : CH4. TS-Servos : CH1, CH2, CH3 je nach TS-Typ, s. Diagramm unterhalb!
Zum Empfänger
Zu den Servos
vorne

3. LED ANZEIGE
Rot Dauerlicht Gyro ist im Head-lock Mode
Blau Dauerlicht Gyro ist im normalen Mode
Rot, Gelb und Blau Dauerlicht Gyro wartet auf Empfängersignal
Rot, Gelb und Blau blinken simultan Gyro initialisiert, Gyro/Heli nicht bewegen, Fernsteuerungshebel in Mittenstellung / Gas aus
Rote LED blinkt Fehler während der Initialisierung, erneut Einschalten
4. GYROBEFESTIGUNG
• Der Gyro sollte auf einer Fläche montiert warden, welche sich im Lot mit der Hauptwelle befindet und so
weit wie möglich vom Antrieb und anderen elektrischen Komponenten entfernt liegt.
• Montieren sie den Gyro mittels doppelseitigem Schaumklebeband, achten sie darauf das die Leitungen
nicht auf Zug sind um keine Vibrationen zu übertragen. Der Gyro darf keine Teile des Helis berühren
köknnen. Für kleine Hubschrauber – benuzten sie ein 2-3mm Schaumklebeband.
• Wenn sie den Gyro in einem Großen oder stark vibrierenden Helikopter montieren, benutzens sie zwei
Klebebänder mit einer Metallplatte (Münze) in der Mitte, um die Dämpfung anzupassen.
• Es gibt drei Befestigungslagen die gewählt warden können (der Gyro muss entsprechend später darauf
eingestellt werden).
Befestigung 1: Befestigung 2: Befestigung 3:
5. INSTALLATION DER SERVOHÖRNER UND VERBINDUNGEN
Stellen sie sicher das alle Bauteile am Rotorkopf, Taumelscheibe und Heckrotor korrekt montiert sind und
leichtgängig sich betätigen lassen. Stellen sie sicher, dass die Servos fest montiert sind.

Bitte installieren sie die Unibälle auf den zyklischen Servohörnern im entsprechenden Abstand: 12.5-13mm (250,450),
14-14.5mm (500), 14.5-15mm (600).
Bitte installieren sie den Uniball auf dem Heckservohorn im entsprechenden Abstand: 4.5mm (250), 7.5-10mm (450,
500), 13.5 - 15mm (600 und größer) .
Montieren sie das Heckservohorn so, dass es sich in der Mittenstellung befindet. Dabei sollte am Heckrotor ein
pitch von etwa 8° entstehen.
Hinweis: Verbinden sie die Servos noch nicht mit dem Gyro!
6. GYRO EINSTELLUNG VIA FERNSTEUERUNG
6.1. FERNSTEUERUNGSEINSTELLUNG
Schalten sie ihre Fernsteuerung ein und legen sie ein neues Modell an. Stellen sie sicher, dass alle Trimmungen und
Sub-Trimmungen sich auf 0 befinden. Wählen sie ein nichtmischendes Taumelscheibenprogramm (Futaba:H1; JR:
1 servo NORM) vor (90 Grad Mischung). Stellen sie sicher, dass alle anderen Mischprogramme für Taumelscheibe
und Heck deaktiviert sind. Belassen sie die Gas- und Pitchkurve bei einer gerade Linie für den Moment.
Anfangswerte für DX7 und 8FG:
DX7
Parameter Name Wert

Type of gyro sensitivity adjustment GYRO SENS
Tail sensitivity adjustment GYRO SENS->RATE 0: 28% 1: 71%
Tail sensitivity switch INPUT SELECT->GEAR GYRO SYS
All the channel travel adjust TRAVEL ADJUST 100%
All the channel sub trim SUB TRIM 0
All the channel dual rate D/R&EXP->D/R 100%
Aileron elevator exp D/R&EXP->EXP +40%
8FG
Parameter Name Wert
Gyro sensitivity in each condition and mode
Model->Gyro Rate In each condition and mode
35%
All channel end point Linkage->End Point 100
All the channel sub trim Linkage->Sub Trim 0
All the channel dual rate Model->Dual Rate 100
Aileron elevator exp Model->Dual Rate-EXP -40
6.2 KONFIGURATION / PROGRAMMIERUNG
Es gibt zwei Programmiermodi, das System Menü sowie das Setup Menü.
Hinweise:
• Verlassen sie den Programmiermodus bevor sie das Modell fliegen.
• Die Parameter beider Modi können rollierend angewählt werden.
• Wenn sie einen Parameter eingestellt haben, drücken sie den SET Knopf um den Wert zu speichern und
zum nächsten Parameter zu gelangen.
• Schliessen sie keine Servos an, solange sie den Servotypen nicht richtig gewählt haben.
• Nach kompletter Programmierung starten sie den Gyro neu (Aus- und Wiedereinschalten).
6.2.1 KONFIGURATION DES SYSTEM MENÜS
In den Programmiermodus System Menü gelangen: Nach dem Einschalten bleiben alle drei LEDs für 5 Sekunden
dauernd an. Wenn sie währenddessen nichts unternehmen, warden die LEDs 6-7mal gleichzeitig blinken und danach
ausgehen. Danach zeigt die rote oder blaue LED den Betriebsmodus Rate oder Headlock an..
Um in den Programmiermodus zu gelangen, müssen sie den Rollhebel ganz in den rechten oder linken Vollausschlag
bringen und halten wärend der 5 Sekunden Dauerlicht nach dem Einschalten des Gyros. Halten sie den Hebel weiter,
während die LEDs 6-7 gleichzeitig blinken. Danach blinken die drei LEDs sequentiell und er Gyro befindend sic him
System Menü. Die LEDs erlöschen sodann, sie können den Hebel in die Mittenstellung bringen. Sie können jetzt auf
den Set Knopf drücken. Alle LEDs warden gemeinsame blinken, gefolgt von gelbem Blinken. Die Anzahl der gelben
Blinker teilt ihnen mit in welchem Parameter sie sich befinden.
Falls sie nicht in das System Menü gelangen können, prüfen sie ob Trim, Sub-Trim oder EXP ihnen keinen rechten
oder linken Vollausschlag am Sender liefern.
Mit dem Rollhebel können sie den aktuellen Wert eines Parameters exakt einstellen (links weniger, rechts mehr).
Durch das Drücken von Set speichern sie den Wert und gelangen in den nächsten Parameter.
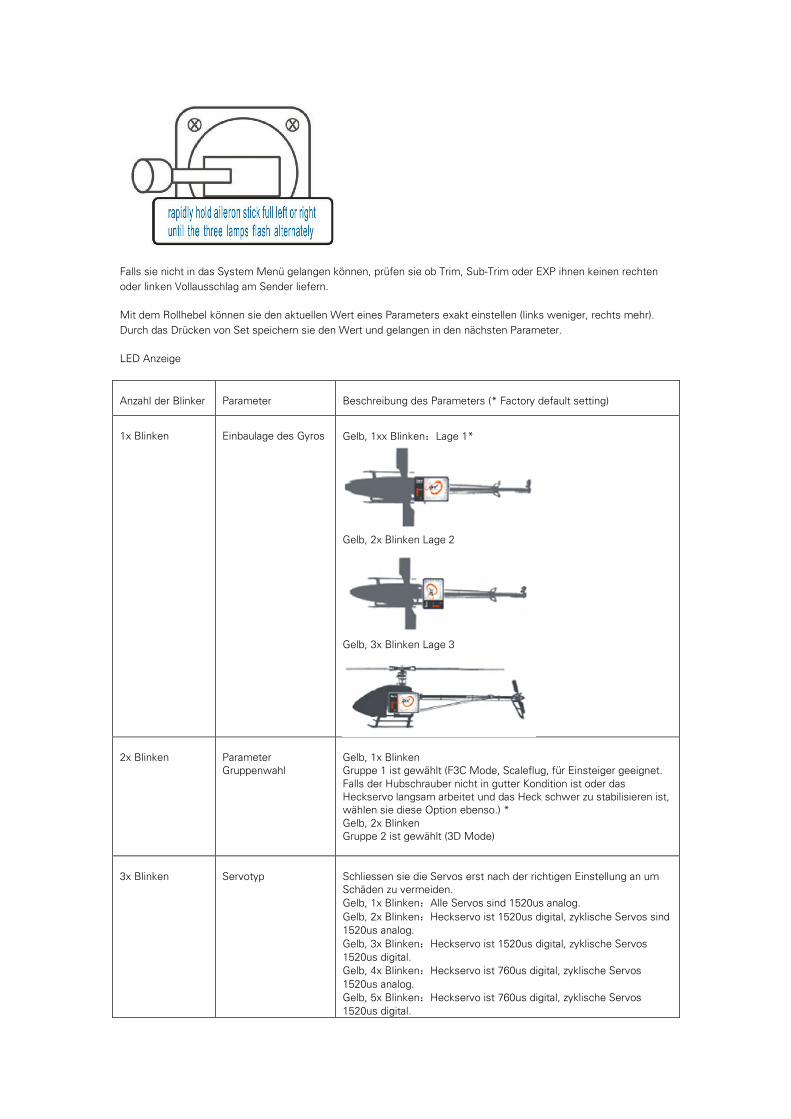
LED Anzeige
Anzahl der Blinker Parameter Beschreibung des Parameters (* Factory default setting)
1x Blinken Einbaulage des Gyros Gelb, 1xx Blinken:Lage 1*
Gelb, 2x Blinken Lage 2
Gelb, 3x Blinken Lage 3
2x Blinken Parameter Gruppenwahl
Gelb, 1x Blinken Gruppe 1 ist gewählt (F3C Mode, Scaleflug, für Einsteiger geeignet. Falls der Hubschrauber nicht in gutter Kondition ist oder das Heckservo langsam arbeitet und das Heck schwer zu stabilisieren ist, wählen sie diese Option ebenso.) * Gelb, 2x Blinken Gruppe 2 ist gewählt (3D Mode)
3x Blinken Servotyp Schliessen sie die Servos erst nach der richtigen Einstellung an um Schäden zu vermeiden. Gelb, 1x Blinken:Alle Servos sind 1520us analog. Gelb, 2x Blinken:Heckservo ist 1520us digital, zyklische Servos sind 1520us analog. Gelb, 3x Blinken:Heckservo ist 1520us digital, zyklische Servos 1520us digital. Gelb, 4x Blinken:Heckservo ist 760us digital, zyklische Servos 1520us analog. Gelb, 5x Blinken:Heckservo ist 760us digital, zyklische Servos 1520us digital.

Gelb, 6x Blinken:Heckservo ist 960us digital zyklische Servos 1520us digital.
4x Blinken Taumelscheibentyp Gelb, 1x Blinken:Mechanischer Mixer Gelb, 2x Blinken:120 Grad CCPM* Gelb, 3x Blinken:135 Grad CCPM Gelb, 4x Blinken:140 Grad CCPM Gelb, 5x Blinken: 90 Grad CCPM
5x Blinken Pirouettenoptimierung Gelb, 1x Blinken Positiv Blue, 1x Blinken Negativ* Die Taumelscheibe wird stabilisiert, wenn sie den Hubschrauber um die Hauptrotorwelle drehen, soll die Taumelscheibe konstant in eine Richtung zeigen. Tut sie dass nicht, ändern sie Optimierung. Wenn sie die Einstellung nicht innerhalb von 40 Sekunden abschliessen, geht die Taumelscheibe wieder in Waagerechte Lage, sie müssen den Set Knopf 6x drücken um wieder hierher zu gelangen.
6x Blinken Data Reset Bewegen sie den Rollhebel nach rechts und links in schneller Abfolge für ein paar Mal um alle Parameter des System und Setup Menüs zurückzusetzen.
6.2.2 KONFIGURATION DES SETUP MENÜS
Um in den Programmiermodus zu gelangen, müssen sie den Ruderhebel ganz in den rechten oder linken
Vollausschlag bringen und halten wärend der 5 Sekunden Dauerlicht nach dem Einschalten des Gyros. Halten sie
den Hebel weiter, während die LEDs 6-7 gleichzeitig blinken. Danach blinken die drei LEDs sequentiell und er Gyro
befindend sich him Setup Menü. Die LEDs erlöschen sodann, sie können den Hebel in die Mittenstellung bringen.
Sie können jetzt auf den Set Knopf drücken. Alle LEDs warden gemeinsame blinken, gefolgt von gelbem Blinken.
Die Anzahl der gelben Blinker teilt ihnen mit in welchem Parameter sie sich befinden.
Falls sie nicht in das System Menü gelangen können, prüfen sie ob Trim, Sub-Trim oder EXP ihnen keinen rechten
oder linken Vollausschlag am Sender liefern.
Mit dem Ruderhebel können sie den aktuellen Wert eines Parameters exakt einstellen (links weniger, rechts mehr).
Mit dem Rollhebel können sie die Sequenz eines Parameters anwählen. Durch das Drücken von Set speichern sie
den Wert und gelangen in den nächsten Parameter.
LED Anzeigen
Drei gleichzeitig blinkende LEDs zeigt die Parameternummer an.
In einem Parameter zeigt rotes Blinken die Sequenznummer eines Parameters an. In Parameter 1, 3, 4, 6, 7, zeigt
schnelles gelbes Blinken eine Erhöhung des Wertes, schnelles blaues Blinken eine Erniedrigung des Werts an.
Anzahl der Blinker Parameter Beschreibung des Parameters
1x Blinken Gyrosensibilität Bewegen sie den Rollhebel um die Achse zu wählen; Bewegen sie den Ruderhebel umm den Wert zu verändern, Werte von 10~125 sind möglich.

Rot,1x Blinken : Heck (default Wert:F3C 70; 3D 100) Rot,2x Blinken : Rollen(default Wert:F3C 40; 3D 40) Rot,3x Blinken : Nicken(default Wert:F3C 40; 3D 40)
2x Blinken Servoumkehr Bewegen sie den Rollhebel um eines der 4 Servos zu wählen, bewegen sie den Ruderhebel rechts oder links um die Richtung umzukehren; Gelb ,1x Blinken positiv Blue ,1x Blinken negativ Prüfen sie ob der kollektive Pitch richtig arbeitet, prüfen sie ggf. Ihre Verkabelung an “CH1”, “CH2”, “CH3”. Rot,1x Blinken :CH1(default: negativ) Rot,2x Blinken :CH2(default: positiv) Rot,3x Blinken :CH3(default: positiv) Rot,4x Blinken :CH4(default: negativ)
3x Blinken Servotrimmung Bewegen sie den Rollhebel um eines der 4 Servos zu wählen, bewegen sie den Ruderhebel rechts oder links um die Mittenstellung zu justieren.; Zentrieren sie den kollektiven Pitch, justieren sie die Werte von “CH1”, “CH2”, “CH3” und die Hornpositionen so dass diese rechtwinklig bei 0 Grad Pitch stehen. (alle Standardwerte sind 0, justierbar von -125 bis 125.) Rot, 1x Blinken :CH1 Rot, 2x Blinken :CH2 Rot, 3x Blinken :CH3 Rot, 4x Blinken :CH4
4x Blinken Servoweg Bewegen sie den Rollhebel um eines der 4 Servos zu wählen, bewegen sie den Ruderhebel rechts oder links um die Servoweg zu justieren, Wertebereich ist 20 bis 125. Rot, 1x Blinken : Richtung A Heckservo (default: 70) Rot, 2x Blinken : Richtung B Heckservo (default: 70) Rot, 3x Blinken : Roll-Limit TS (default: 80) Rot, 4x Blinken : Nick-Limit TX (default: 80)
5x Blinken Gyro-Wirkrichtung Bewegen sie den Rollhebel um eines der 3 Achsen zu wählen, bewegen sie den Ruderhebel rechts oder links um die Wirkrichtung zu justieren. Gelb, 1x Blinken positiv Blue, 1x Blinken negativ Rot, 1x Blinken : Ruderachse(default: positiv)
Rot, 2x Blinken : Rollachse (value: positiv) Rot, 3x Blinken : Nickachse (value: positiv) Hinweis: Überprüfen sie die Wirkrichtung vor dem Flug! Falsch eingestellte Wirkrichtung verursacht i.d.R. schwere Schäden.
6x Blinken Kollektiver Pitchweg
Bewegen sie den Ruderhebel um den Wert zu verändern; (default: 60, Werte von -125 bis 125). Sie können auch die Servowegsbegrenzung anstelle dieser Funktion nutzen.
7x Blinken CP / Heckrotormischung
Bewegen sie den Ruderhebel um den Wert zu verändern; (default: 0, Werte von -40 bis 40). Bewegen sie den CP Hebel um den Betrag und die Richtung der Mischfunktion zu prüfen. Dies ist besonders für große Scalehubschrauber empfohlen. Wenn das Heck im Headlock Modus bei Scalehubschraubern schwingt, ist dieser Wert zu justieren.
Bitte gehen sie sodann nocheinmal ins System Menü, Parameter 5, um sicherzustellen, dass die Pirouetten-
Optimierung in der korrekten Wirkrichtung funktioniert.
7. VOR DEM FLUG ÜBERPRÜFEN:
7.1 Vor dem ersten Flug!

Stecken sie den ESC/Motor ab und schalten sie Sender und Heli ein. Prüfen sie, ob alle Funktionen der Servos
korrekt ausgeführt warden.
Heben sie den Heli hoch und rotieren sie ihn in allen drei Achsen um festzustellen, dass die Wirkrichtung korrekt ist.
Eine falsche Wirkrichtung führt zu schweren Schäden am Gerät!
Prüfen sie im System-Menü die Pirouetten-Optimierung.
Ruderachse:::: Rollachse::::
Nickachse
7.2 VOR JEDEM FLUG ÜBERPRÜFEN:
• Sender- und Empfängerbatterien müssen ausreichende Kapazität für einen Flug aufweisen.
• Prüfen sie, ob der Gyro einwandfrei arbeitet.
• Prüfen sie, ob die Wirkrichtung des Gyros korrekt ist.
• Prüfen sie, ob der Gyro in der richtigen Betriebsart arbeitet.
• Prüfen sie, ob der Gyro sicher befestigt ist.
Copyright @2013 Roban Limited