research article hybrid indoor-based wlan-wsn...
TRANSCRIPT
Research ArticleHybrid Indoor-Based WLAN-WSN Localization Scheme forImproving Accuracy Based on Artificial Neural Network
Zahid Farid Rosdiadee Nordin Mahamod Ismail and Nor Fadzilah Abdullah
Department of Electrical Electronic and Systems Engineering Faculty of Engineering and Built EnvironmentUniversiti Kebangsaan Malaysia (UKM) 43600 Bangi Selangor Malaysia
Correspondence should be addressed to Zahid Farid zahidf9yahoocom
Received 8 January 2016 Revised 18 March 2016 Accepted 9 May 2016
Academic Editor Hua Lu
Copyright copy 2016 Zahid Farid et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
In indoor environments WiFi (RSS) based localization is sensitive to various indoor fading effects and noise during transmissionwhich are the main causes of localization errors that affect its accuracy Keeping in view those fading effects positioning systemsbased on a single technology are ineffective in performing accurate localization For this reason the trend is toward the use of hybridpositioning systems (combination of two or more wireless technologies) in indooroutdoor localization scenarios for getting betterposition accuracy This paper presents a hybrid technique to implement indoor localization that adopts fingerprinting approachesin bothWiFi andWireless SensorNetworks (WSNs)Thismodel exploitsmachine learning in particular Artificial Natural Network(ANN) techniques for position calculationThe experimental results show that the proposed hybrid system improved the accuracyreducing the average distance error to 105m by using ANN Applying Genetic Algorithm (GA) based optimization technique didnot incur any further improvement to the accuracy Compared to the performance of GA optimization the nonoptimized ANNperformed better in terms of accuracy precision stability and computational timeThe above results show that the proposed hybridtechnique is promising for achieving better accuracy in real-world positioning applications
1 Introduction
In indoor environmentsWiFi (RSS) based localization is sen-sitive to various indoor fading effects and noise during actualdata transmission which are the main causes of localizationerrors that affect the accuracy [1] Keeping in view those fad-ing effects positioning systems based on a single technologyare ineffective in getting better accuracy and availability Forthis reason the trend is toward the use of hybrid positionsystems (combination of two or more wireless technologies)in indooroutdoor localization scenarios for getting betterposition accuracy and availability by exploiting the differentcapabilities of the two technologies [2]
Hybrid localization has opened up new opportunities inhealthcare systems especially using sensor-based technology[3] Hybrid indoor localization systems when coupled withvital body signs monitoring devices can provide improvedinformation for the health and safety of chronic and elderlypatients at home as well as in care centers For elderly agedpeople it is of utmost importance to provide an affordable
and a high-quality healthcare service to allow them to liveindependently A multitasking monitoring system can beattached to persons in need to provide vital body signsreading (such as temperature blood pressure and oxygensaturation) and to provide them to the caretakers togetherwith the exact location of the person This monitoring infor-mation which can be precise to the order of 1 meter can bevery important in the case of emergencies when the searchingtime of a person in need can be significantly reduced
Another potential application for wireless indoor local-ization can be found in the positioning detection of elderlypatients affected by dementia Various hospitals worldwidestart to implement electronic bracelets which detect thecrossing of wandering patients through doors in the ward [4]Our system can be applied to extend the crossing detectionwith a precise measurement of the location of each patientto facilitate their tracking and retrieval and prevent theirconfinement in a small area inside the ward
Hybrid localization can also be beneficial in the auton-omous motion of large robotic trolleys and forklifts in huge
Hindawi Publishing CorporationMobile Information SystemsVolume 2016 Article ID 6923931 11 pageshttpdxdoiorg10115520166923931
2 Mobile Information Systems
storage warehouses Nowadays distribution companiesmakeuse of visual tracking of coloured paths on the floor and ofspecific markings in their warehouses With wireless indoorlocalization the motion can be based on hybrid localizationOur system can provide the added advantage of a largermotion freedom and improved positional awareness in casethe fixed (or conventional) tracking is lost
Considering the wide deployment ofWiFi and the poten-tial of WSNs in pervasive and context-aware applicationstheir combined utilization is attracting increasing attentionin location-based services (LBSs) In the context of indoorpositioning data from both WiFi and WSN systems can becollected and exploited to refine and enhance the derivationof location information In our work we design and evaluatehybrid indoor position system which combines WLANAccess Point andWireless Sensor Network (WSN) technolo-gies The main purpose of using hybrid indoor localizationapproach is to get better accuracy with fast processing timeto locate the userobject in the indoor environment keepingin view the stability of our algorithm too
The proposed hybrid technique implements indoor local-ization that adopts fingerprinting approaches in both WiFiand Wireless Sensor Networks (WSNs) This model exploitsmachine learning techniques for position calculation In par-ticular artificial neural network (ANN) based on the gradientdescent with momentum (ANN-GDM) back-propagationlearning is used [5] A dataset of location fingerprints in termsof RSS measurements is used to train an ANN and builda classification model In essence this model can map thecollected RSS signal to the position coordinate (longitude andlatitude) of themobile node Two outputs were obtained fromthe ANN one corresponds to WLAN fingerprinting and theother one corresponds to WSN motesrsquo values
Besides this selection of using ANN approach is becauseof its robustness against noise and interference which is oneof the major factors affecting the accuracy of indoor positionsystem [6] Two sets of experiments were conducted in areal indoor environment using the individual technologies ofWiFi andWSN Furthermore Genetic Algorithm (GA) basedoptimization [7] is also implemented to check the accuracyimprovement In GA case it did not incur any improvementto the accuracy in this hybrid formation Compared to theperformance of GA optimization the nonoptimized ANN-GDM performed better in terms of accuracy precisionstability and computational time
The study is organized into four parts the first part of thestudy discusses the previous related works the second partdiscusses ANN third part discuss proposed hybrid local-ization system the fourth part comprises the results anddiscussion and the last part discusses conclusion and futurework
2 Previous Related Works
Several efforts have been done to develop location determina-tion systems based on RSS signals from a single wireless tech-nology Techniques such as Bayesian classification and filter-ing 119870-Nearest Neighbors GPS-like triangulation KalmanFiltering neural networks and support vector machine
(SVM) have been employed for solving this problem [8ndash10]However positioning systems based on a single technologyare ineffective in getting better accuracy and availability Forthis reason several researchers have attempted to use hybridpositioning systems in indooroutdoor localization scenariostowards getting better position accuracy and availability byexploiting the capabilities of different wireless technologies
A survey of hybrid schemes for location estimation inWireless Sensor Networks has been presented in detail in[8] Zhang et al [11] proposed an RF-based hybrid approachldquoCOCKTAILrdquo which combined WSNs and RFID technolo-gies The model described the relation between variations inRSS and the target and it utilizes the geometric method aswell as the dynamic cluster based probabilistic cover algo-rithm to solve device-free localization problem WiFi posi-tioning is combined with pedestrian dead reckoning (PDR)systems in [12] A hybridization of these two technologiesovercomes the fluctuation of RSS-basedWiFi positioning dueto the fluctuation of RSSs and the accumulation of error overtime in PDR system
Another research work is presented on hybrid indoorlocalization system based on pyroelectric infrared (PIR)sensors and RF model [13] This hybrid model works in twostages In the first stage the zone of the target person isidentified by PIR sensors In stage two RF fingerprints withinthe identified zone will be processed to estimate the finalposition of the person
Li et al [14] presented a hybrid approach for track-ing moving objects utilizing fingerprinting and RSS-basedtechniques which are fused using RFID tagsreaders andparticle filtering A mean error of about 13m accuracy wasachieved Another hybrid localization system by Bahillo et al[15] implemented an RTTmeasurement method using 80211WLAN transceivers and the robust least-squared multilat-eration (RLSM) technique A custom printed circuit board(PCB) was used for time measurements Position accuracy oflower than 3mwas achievedMoreover Cheng et al [16] pro-posed a hybrid approach using 119870-medoids clustering algo-rithm to partition the set of fingerprints into several subsetsand train a multicategory support vector machine (SVM)on each subset data The authors concluded that this hybridapproach could be used to solve 3DWLAN indoor position-ing
A monitoring system based on PIR sensors and RF basedon indoor humanrobot localization is proposed in [17] Thistechnique fuses the location information obtained from RFpropagation model and PIR RF propagation model is usedfor the position of target estimation and it is assumed to bedistributed in someprobable regionThe authors useCramer-Rao bound (CRB) to determine the probable region
Another research work presented an indoor position-ing system that integrated fingerprinting and trilaterationapproaches [18] An online phase of fingerprinting is firstused in which the nearest neighbors (NN) of the target nodeare calculated Later on the trilateration approach is used toestimate the coordinate without the use of radio propagationmodelThe distance between the calculated NN and detectedaccess points (AP) is estimated using the Euclidian distanceproviding the radii for the trilateration approach The mean
Mobile Information Systems 3
b
InputsSum
function
Activation function
(net)jOutput
Gradient decent back-propagation
Activation function
Target
Normalized hybrid training data
minus
X1
X2
Xn
sumWijXj
h1
h2
h3
hn
sumWabhb
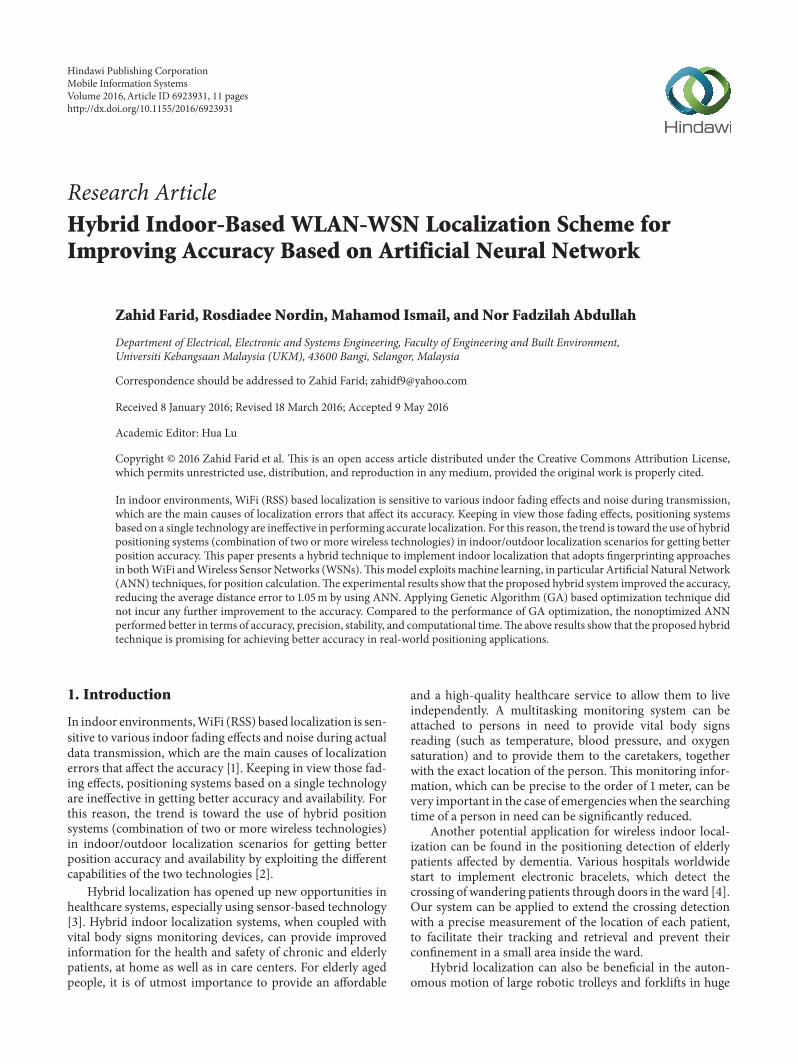
Figure 1 Gradient decent with momentum back-propagation neural network
error of this proposed approach was only 199 and 140metersfor 3 and 4 anchor nodes respectively
3 Artificial Neural Network
Artificial neural networks (ANNs)method assumes that RSSscannot be analyzedmathematically because they are too com-plex ANNs use nonlinear discriminant functions for classi-fication Due to the powerful learning and adaptive capabil-ities ANN technique has been employed in the positioningapplications especially in fingerprinting technique [19] Awidely used ANN structure among modelers is the feed-forward back-propagation neural network It is also consid-ered one of the simplest and most general methods used forsupervised trainingMany different varieties of learning algo-rithms are available including the popular back-propagationlearning algorithm [3]
31 Implementation of Gradient Decent with MomentumBack Propagation In this work a two-layer artificial neu-ral network with gradient decent with momentum back-propagation learning algorithmwas used in the online phasewhich is the actual estimation of indoor position The gra-dient descent with momentum back-propagation algorithmis an iterative gradient method based algorithm developedto introduce synaptic correction (or weight adjustments) byminimizing the sum of square errors (the objective function)Themomentum term helps average out the oscillation occur-ring during the training process and improving the speedof convergence [20] The normalized RSS signal from twotechnologies which are used as training patterns are fed asinput to the ANN together with location coordinates (119909 119910)fingerprinting patterns that are used as target values duringthe training phase and form the required output of the ANNduring the online phase The ANN structure is shown inFigure 1Theproposed systemwas implemented inMATLAB
We implement the position algorithm based on gradientdecent with momentum back-propagation in the followingsteps
(i) Feed-forward computation
(ii) Back-propagation to the output layer and weightadjustment
(iii) Back-propagation to the hidden layer and weightadjustment
(iv) Global position error calculation
311 Feed-Forward Computation Hybrid training patternsare fed to the input layers of the neural network architecturewhich are multiplied with the weighted sum of the inputlayers to 119895th node in the hidden layer which is given by
net (119910) =119899
sum
119894=1
119908119894119895119909119895 (1)
After the training step of neural networks appropriateweights are obtained A multilayer perceptron network withtwo hidden layers is used for the ANN-based positioning sys-tem The input vector of signal strengths is multiplied by thetrained inputweightmatrix and then added to input layer biasas shown in
net (y)=nsum
i=1wij119909119895 + 119887 (2)
The result is transmitted to the activation function (sig-moid) of the hidden layer neuron as in
net (119910) = sigmod(119899
sum
119894=1
119908119894119895119909119895+ 119887) (3)
312 Back-Propagation to the Output Layer and WeightAdjustment Theoutput of this transfer function ismultipliedby the trained hidden layer weight matrix and then addedto the hidden layer bias The output of the system is theestimated location as shown in
120575119896= (119905119896minus 119900119896) 119900119896(1 minus 119900
119896) (4)
where 119905119896is actual activation value of the output node 119896 119900
119896=
Expected target output for node 119896 and 119900119896(1minus119900119896) =Derivative
of the Sigmoid function
4 Mobile Information Systems
Table 1 ANN designed parameters
Parameters Value RemarksNumber of inputs 6 WiFi 3 WSN 3Number of hidden layers 2 Log-Sigmoid activation functionNumber of outputs 2 Linear activation function
Number of neurons in hidden layers 15 For layer 118 For layer 2
Learning rate (119868119903) 001 Three learning rate is used for each layer
Momentum rate (120583) 06 Three momentum rate is used for each layerTarget error (goal) 0001m
The weight adjustment 119908119895119896 between the output node 119896
and the node 119895 is shown in
Δ119908119899
119895119896= 119868119903120575119896119909119896+ Δ119908(119899minus1)
119895119896120583 (5)
where 119868119903is learning rate and 120583 is momentum
313 Back-Propagation to the Hidden Layer and WeightAdjustment The error signal for hidden nodes is calculatedby adjusting the weight 119908
119894119895 between the input node 119894 and
the node 119895 which are calculated as
119908119895119894= 119908119894119895+ 119868119903120575119895119909119895+ Δ119908(119899minus1)
119895119894120583 (6)
314 Global Position Error Calculation Target data requiresnormalization before feed to ANN 119883 and 119884 coordinates arein meters with a range from minus25 to 25m 119883 and 119884 rangesabove refer to the extension of the space where the measure-ments were taken Besides this 119883 and 119884 must be normal-izing between 0 and 1 according to this linear transformation
997888rarr119883119895norm =
25lowast (04) + (05) (7)
As minus25 lt 119883119895lt 25 minus gt 01 lt 119883
119895norm lt 09
norm =
25lowast (04) + (05) (8)
As the input is the RSS signal from the four access pointsthe target training (testing) data is defined as in
Target 119905119895= 119883119895 119884119895 (9)
Output is shown in
119874119895= 119883119895 out 119884119895 out (10)
By inverting the formulas we get total positioning error asshown in (11)
Error = 25
04(119883119869 out minus 119883119895 target)
25
04(119884119869 out minus 119884119895 target) (11)
Mean ErrorPosition ⟨100381710038171003817100381710038171003817
997888997888997888997888997888997888997888997888997888997888997888Errorposition 119895100381710038171003817100381710038171003817⟩ (12)
where mean extends over all training data and⟨997888997888997888997888997888997888997888997888997888997888997888Errorposition 119895⟩ is the vector normalized The important
factor to achieving better results from ANN model is tuningits parameters However there is no definite and explicitmethod to select optimal parameters for the ANN Trialand error method is commonly used to choose appropriateANN parameters [21] Many parameters are involved intuning the ANN including the number of hidden layers thenumber of neurons in each hidden layer initial weights tostart the training the transfer function learning rate and themomentum rate The parameters of the back-propagationmethod which give the least error are given in Table 1
32 Pseudo Code for Implementing Back-Propagation inIndoor The proposed two-layer artificial neural networkwith gradient descent with momentum back-propagationpseudo code to calculate the position estimation is shown inPseudocode 1 We first compute the feed-forward computa-tion to compute all the activations and output value through-out the network Then back-propagation process startsbetween output layer and hidden layer with weight adjust-ments At last global position error calculation is done
4 Proposed Hybrid IndoorLocalization System
Numerous wireless communication techniques have beenwidely used in developing the indoor positioning systemThese techniques include the wireless local area network(WLAN) radio frequency identification (RFID) bluetoothand wireless sensor network (WSN) With the expansionof free WLAN services and popularity of smartphoneslocation-based services have drawn benefits for many appli-cations WLAN coverage can be found in common placessuch as homes shopping mall offices or campuses InadditionWLAN networks and devices have recently becomecheaper Hence there is no need to employ any additionalhardware and infrastructure for the purpose of indoor track-ing Using WiFi for indoor localization two approaches aremainly used a model-based approach and a fingerprinting-based approach [22]
The model-based method relies on the indoor path-lossmodel to estimate user location Using a path-loss modelsuch as log-distancemodel the relation between transmittingdistance and RSSI could be established and the user location
Mobile Information Systems 5
(1) initialize the ANN model(a) 119871119903= 119909 initialize the learning rate
(b) 120583 = 119910 initialize the momentum(c) for each weight 119908
119908 = rand () initialize the weight with small random number
(2) while (number of iterations ltMAX and distance error gt 120576) training loop MAX and 120576 are constant threshold valuesfor each pattern in the training set
for each layer in the ANN
for each node 119899 in the layer (a) Calculate weighted sum of inputs to 119899 (Equation (1))(b) Add the bias value to the calculated sum (Equation (2))(c) Calculate the activation function for 119899 (Equation (3))
Back propagate error through output layer (Equation (4))Back propagate error through hidden layer (Equation (5))for each weight 119908
Update 119908 (Equation (6))
Calculate distance error (Equation (11)) Equation (12) for testing data
(3) Repeat Step (2) for the testing dataset
Pseudocode 1
is computed using triangulation On the other hand locationfingerprinting utilizes the received signal strength (RSS) fromseveral Wireless Access Points (WAPs) or sensor nodes tomap the signals features measured at some location (119909 119910)
into the coordinates of that location creating a sort of signalidentifier or a fingerprint for each location and stored in adatabase called ldquoradio maprdquo A pure model-based methodwhich does not rely on a radio map shows very low accuracydue to the fading characteristics of the wireless channelWalls objects and people moving around all distort the sig-nal and the received signal strength deviates from the model[23] Our work focuses on the fingerprinting-based model
The proposed hybrid positioning system adopts finger-printmatching as the basic scheme of location determinationLocation fingerprinting utilizes the received signal strength(RSS) from several Wireless Access Points (WAPs) or sensornodes to map the signals features measured at some location(119909 119910) into the coordinates of that location creating a sortof signal identifier or a fingerprint for each location Thefingerprinting method consists of two phases [24] Phase 1is the so-called calibration phase offline phase or trainingphase in which received signal features from all WAPs orsensor nodes at selected locations in a building are recordedin a database called ldquoradio maprdquo as a function of the userrsquoslocation information (latitude longitude)
Phase 2 is the localization phase or online phase inwhich the location of an object is determined by applying apattern-matching algorithm (an ANN model in our case) tomatch the real-time (online) measurements of RSS with theclosest location that can be found in the radio map database
This method does not require specialized hardware in eitherthe mobile device or the receiving end nor is time synchro-nization necessary between the stationsThemajor drawbackof the fingerprinting approach is the laborious and time-consuming calibration process The fingerprinting workingflow diagram is shown in Figure 2
41 Experimental Setup Initial data collection and analysisare the first step for location fingerprinting implementationExperimental data of RSS samples from both IEEE 80211bg-based WAPs and ZigBee (XBee S2) sensor nodes werecollected in the basement of the Faculty of Engineering andBuilt Environment National University of Malaysia (UKM)Malaysia to represent the indoor environment Experimentalarea is surrounded by various laboratories long corridorslecture halls offices and meeting rooms The layout of theexperimental area is shown in Figure 3
The measurement set consisted of a laptop computerLenovo G580 with a core i5 processor an onboard AtherosAR9285 Wireless Adaptor for the collection of RSS sampleswith Windows 7 operating system An adjustable (height)moving table was used to carry the computer at several fixedpredetermined heights The measurement operation con-sisted of nearly uniformly distributed anchor pointswhich are1 meter apart in 119883 direction and 15 meters apart in 119884
direction For hybrid RSS data collection we marked a totalof 96 anchor points fromwhich we collect hybrid data for fin-gerprinting implementation The study area is mapped withCartesian coordinates system with the starting coordinate as(0 0)
6 Mobile Information Systems
Anchor point-1
Anchor point-2
Offline phase collection of fingerprint
Online phase localization
(x y)
(x y)
(x y)
(x y)
(x y)
(x y)
Mobile unitAnchor point-3
Anchor point-n
Artificial neural network with gradient decent with
momentum learning
Mobile user position
RSS data from WAPs
RSS data from WSN motes
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
Figure 2 ANN-based fingerprinting localization
Lab
Study seats
Lab
Lab
Lab
Lab
96 anchor points marked
WAPs
1m2m
2m
2m
2m
15m
10m
150m
28m
WSN nodes distance from ground level is 150 cm
Figure 3 Experimental area layout
42 Data Collection from WAPs Four WAPs were used tocollect the RSS data for location estimation Those WAPsformed the existingWLAN communication infrastructure of
the building near the experimental area Positions of accesspoints are not changed The use of a real communicationinfrastructure enables the identification of practical limita-tions and difficulties and ensures a fair evaluation underrealistic operating conditions Open WiFi Scanner softwareldquoinSSIDerrdquo [25] was used for collecting and analyzing RSSIvaluesThemodificationwasmade in the ldquoinSSIIDerrdquo to showthe time stamps and to save the RSS data in text format withMAC address along with signal strength values Data werecollected during a working day More than 100 RSS sampleswere collected at each anchor point (running ldquoinSSIDerrdquo soft-ware for about 2min) Signal fluctuations were suppressedby computing the average RSS from 50 samples
43 Data Collection from WSN Devices The data measure-ment and transfer from WSN devices used two types of Zig-Bee nodes (XBee series 2) [26] the sensor nodes (to transmitthe RSS data) and a coordinator node (to receive RSS data)Four sensor nodes were placed at four corners in of the exper-imental area mounted on a surface 15m above the groundA sensor node has four basic components a magnetic sensorwith a small permanent magnet an ATmega 328P microcon-troller as a Barebone a ZigBee module (XBee series 2) and apower unit (LiPo rechargeable battery 37 v1000mAh) [27]
On the other hand the coordinator which collects RSSdata from sensor nodes is attached to the laptop which is90 cm above ground in the default setting The coordinatorhas four components an Arduino Mega board based on theMega 2560 microcontroller a liquid crystal display (LCD)a ZigBee module (XBee series 2) and a power unit (LiPo
Mobile Information Systems 7
Artificial neural network(gradient decent with
WiFi indoor scenario WSN indoor scenario
Sensor components
RSS data collector
ANN outputs
Sensor node
Coordinator
12345678
12345678
momentum)
1m1m
Figure 4 Proposed hybrid indoor localization system
rechargeable battery 74 v1000mAh) The X-CTU softwarefrom DIGI International [28] was used to configure thesensor node with the microcontroller and the coordinatornode to establish a communication protocol between the twoZigBee nodes for transmitting and receiving of RSS data Inthe first scenario RSS training data is collected and stored ina database In the second scenario from the pool of trainingdata a small test portion data is randomly selected (inpercentage) and given to the ANN for testing purposes Twooutputs were obtained from the ANN one corresponds toWLANfingerprinting and the other one corresponds toWSNmotesrsquo values The proposed hybrid architecture is shown inFigure 4
5 Results and Discussion
To evaluate the performance of a positioning system twoparameters are used accuracy and precision The accuracyof the system is expressed in terms of the positioning errorwhich is obtained from a test dataset The test data contain acollection of fingerprints associated with a location the posi-tioning algorithm processes each fingerprint and attempts to
calculate the corresponding locationThe obtained estimatedlocation is compared with the real location by calculating theEuclidean distance between the two to obtain the deviationbetween the original and the estimated values The averagepositioning error relies on the true and estimated locationto calculate a value that correctly expresses the accuracy ofthe system Usually the error between the two positions isexpressed in meters or centimeters
Figure 5 shows the location of the actual 119909-119910 coordinatesand estimated 119909-119910 coordinates of the test data as calculatedby the ANN-GDM algorithmThe test dataset was randomlyselected from the training dataset The resulting positionerror would be approximately 136m with signals fromWSNalone and 122mwith signals fromWiFi only However whencombining both signals in the hybrid setting the positionerror does not exceed 105 outperforming the cases of signalsfrom individual technologies Figure 6 shows the actual andestimated 119909-119910 coordinates of the training dataset during theoffline phase which stops training after reaching a prespeci-fied value of error
The accuracy of a learning algorithm can be improvedby spending more time in tuning its performance which is
8 Mobile Information Systems
Actual positionEstimated position
0
5
10
15
20
25
Y (m
)
5 0 minus510X (m)
(a) WiFi
Actual positionEstimated position
5 0 minus510X (m)
0
5
10
15
20
25
Y (m
)
(b) WSN
Actual positionEstimated position
4 3 2 15X (m)
15
16
17
18
19
20
21
22
23
Y (m
)
(c) Hybrid
Figure 5 Actual and estimated mean position of the testing dataset of two wireless technologies alone and with hybrid formation
HybridWSNWiFi
101 102 103 104 105 106100
Total number of iterations
0
5
10
15
20
25
30
35
Dist
ance
erro
r (m
)
Figure 6 Training positioning error versus a number of trainingiterations
achieved by allowing a large number of training iterationsin the case of ANN This tradeoff between the accuracy andcomputational time is illustrated in Figure 7
The second parameter of evaluation is defined as thesuccess probability of position calculation with respect topredefined accuracy To evaluate our system with respectto both parameters we present the Cumulative DistributionFunction (CDF) of the error (the difference between the realand calculated location coordinates) Figure 8 shows the CDFplot of the distance error for optimally trained ANN modelRunning the positioning system using the test dataset 50 ofthe time the resulting position error would be approximately14m with signals from WSN alone and 13m with signals
10 5 0 minus5 minus1015X-distance (m)
0
5
10
15
20
Y-d
istan
ce (m
)
Figure 7Actual and estimatedmeanposition of the training datasetbased on hybird
from WiFi only However when combining both signals inthe hybrid setting the position error does not exceed 12m ata probability of 50 outperforming the cases of signals fromindividual technologies
In an attempt to further improve the system accuracywe tried to use GA to optimize the ANN parameters andthereby enhance its performance However the nonopti-mized ANN-GDM performance remained the best choicein terms of accuracy precision stability and computationaltime Applying GA-based optimization in this case did not
Mobile Information Systems 9
Empirical CDF
WiFiWSNHybrid
05 1 15 2 25 30Position error (m)
0010203040506070809
1
CDF
()
Figure 8 CDF localization error of proposed hybrid system
Comparison between ANN-GDM and ANN-GA
ANN-GDMANN-GA
0
5
10
15
20
25
Dist
ance
erro
r (m
)
101 102 103 104 105 106 107100
Epoch
Figure 9 Positioning error versus number of epochs with andwithout GA optimization
incur the expected improvement despite providing a similardecrease in the training error Figure 9 shows the accuracyand computational time in both cases as a function of thenumber of allowed training epochs
The stability of a learning algorithm is one of the impor-tant factors in the neural network [21] It can be defined ashow changes to the training data influence the result of thealgorithm by running the algorithm with same parametersseveral times To evaluate our algorithm to be stable weran the network learning code with various training dataseveral times with the parameters kept constant (hiddennodes learning and momentum rates and initial weights)and the accuracy reached roughly the same value as shownin Figure 10 The value of the distance error as a functionof the number of iterations for four selected training runs isshown in Figure 10 All profiles are roughly the same for allthe performed runs
6 Performance Comparison
The performance of the hybrid indoor localization approachis summarized and compared with several similar research
Position error 1Position error 2
Position error 3Position error 4
101 102 103 104 105 106100
Number of iterations
0
5
10
15
20
25
Dist
ance
erro
r (m
)
Figure 10 Stability analysis of training algorithm
works in Table 2 The considered studies adopted the fin-gerprinting approach for localization and are based on two-dimensional data acquisition When the WiFi and WSN sig-nals are considered separately we achieved average distanceerrors of 122m (using 228 anchor points) and 135m (using96 anchor points) respectively As expected using a largernumber of anchor points a better approximation can beobtained These results show already a better accuracy withrespect to other recently published works Our proposedhybrid indoorWiFi-WSNpositioning system outperforms allprevious results providing an accuracy of 105m when using96 anchor points
7 Conclusion and Future Works
This paper presented a hybrid WiFi-WSN based indoorpositioning system based on the received signal strengthin wireless networks for the purpose of producing bet-ter localization accuracy The joint use of heterogeneoustechnologies can overcome the limitations of each technol-ogy We employed an ANN model using gradient descentwith momentum learning algorithm for location predictiontrained and tested in a heterogeneous environment We alsoconducted an extensive set of experiments in the real indoorscenario to evaluate the performance of our proposal Resultswere derived with and without GA optimization techniquein terms of accuracy precision stability and computationaltime In addition the accuracy of the proposed hybrid indoorpositioning system was compared with other well-knownhybrid systems (probabilistic and deterministic) which havebeen used for indoor localization The hybrid indoor posi-tioning system presented in this paper had the advantage ofbetter accuracy low cost and easy expansibility We believethe system can be used to locate people and assets in severalfields including those of logistics healthcare and manu-facturing Our planned future work includes the extensionof the current research into implementations of hybrid 3Dindoor environments in amultifloor scenario In addition theproposed algorithmwill be evaluated over a larger area to testthe robustness of the algorithm
10 Mobile Information Systems
Table 2 Comparison between the proposed hybrid indoor positioning system and previous hybrid indoor positioning studies
Reference Hybrid positionsystems Type of study Test area Total number of
anchor points Accuracy Implementation
[12] WSN + RFID Experimental 5 times 30m 148(approx) 16m
Fingerprinting +extended Kalmanfilter approach
[29] WiFi +bluetooth
Experimental ampsimulation 50m 24 175m Fingerprinting
approach
[30] WiFi + RFID Experimental 25 times 12m 80(approx) 16m
Fingerprinting +particle filterapproach
Our WiFidata (alone) WiFi Experimental 25 times 28 228 122
Fingerprinting +artificial neural
network
Our WSNdata (alone) WSN Experimental 10 times 28 96 136
Fingerprinting +artificial neural
networkProposedhybridindoorsystem
WiFi + WSN Experimental 10 times 28m 96 105mFingerprinting +artificial neural
network
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors acknowledge support from Grant Ref no GUP-2014-005 and Universiti Kebangsaan Malaysia
References
[1] S Joana Halder and W Kim ldquoA fusion approach of RSSI andLQI for indoor localization system using adaptive smoothersrdquoJournal of Computer Networks and Communications vol 2012Article ID 790374 10 pages 2012
[2] Z Xiong Hybrid and cooperative positioning solutions forwireless networks [PhD thesis] 2014
[3] S C Mukhopadhyay ldquoWearable sensors for human activitymonitoring a reviewrdquo IEEE Sensors Journal vol 15 no 3 pp1321ndash1330 2015
[4] G Ciuti L Ricotti A Menciassi and P Dario ldquoMEMS sensortechnologies for human centred applications in healthcarephysical activities safety and environmental sensing a reviewon research activities in Italyrdquo Sensors vol 15 no 3 pp 6441ndash6468 2015
[5] G P Zhang ldquoNeural networks for classification a surveyrdquo IEEETransactions on Systems Man and Cybernetics Part C Applica-tions and Reviews vol 30 no 4 pp 451ndash462 2000
[6] H Mehmood N K Tripathi and T Tipdecho ldquoIndoorpositioning system using artificial neural networkrdquo Journal ofComputer Science vol 6 no 10 pp 1219ndash1225 2010
[7] J McCall ldquoGenetic algorithms formodelling and optimisationrdquoJournal of Computational and AppliedMathematics vol 184 no1 pp 205ndash222 2005
[8] Y Liu and Z Yang Location Localization and LocalizabilityLocation-Awareness Technology for Wireless Networks Springer2010
[9] J Yiming ldquoIndoor location determinationrdquo in Location-BasedServices Handbook CRC Press New York NY USA 2010
[10] A De Gante and M Siller ldquoA survey of hybrid schemesfor location estimation in wireless sensor networksrdquo ProcediaTechnology vol 7 pp 377ndash383 2013
[11] D Zhang Y Yang D Cheng S Liu and LM Ni ldquoCOCKTAILan RF-based hybrid approach for indoor localizationrdquo in Pro-ceedings of the IEEE International Conference on Communica-tions (ICC rsquo10) pp 1ndash5 May 2010
[12] L-H Chen E H-K Wu M-H Jin and G-H Chen ldquoIntel-ligent fusion of Wi-Fi and inertial sensor-based positioningsystems for indoor pedestrian navigationrdquo IEEE Sensors Journalvol 14 no 11 pp 4034ndash4042 2014
[13] M A Bitew R-S Hsiao H-P Lin and D-B Lin ldquoHybridindoor human localization system for addressing the issueof RSS variation in fingerprintingrdquo International Journal ofDistributed Sensor Networks vol 2015 Article ID 831423 9pages 2015
[14] J Li B Zhang H Liu L Yu and Z Wang ldquoAn indoor hybridlocalization approach based on signal propagation model andfingerprintingrdquo International Journal of Smart Home vol 7 no6 pp 157ndash170 2013
[15] A Bahillo S Mazuelas R M Lorenzo et al ldquoHybrid RSS-RTTlocalization scheme for indoor wireless networksrdquo EURASIPJournal on Advances in Signal Processing vol 2010 Article ID126082 2010
[16] J Cheng Y Cai Q Zhang J Cheng and C Yan ldquoA new three-dimensional indoor positioning mechanism based on wirelessLANrdquoMathematical Problems in Engineering vol 2014 ArticleID 862347 7 pages 2014
[17] R C Luo and O Chen ldquoWireless and pyroelectric sensoryfusion system for indoor humanrobot localization and mon-itoringrdquo IEEEASME Transactions on Mechatronics vol 18 no3 pp 845ndash853 2013
Mobile Information Systems 11
[18] F Subhan H Hasbullah and K Ashraf ldquoKalman filter-basedhybrid indoor position estimation technique in bluetoothnetworksrdquo International Journal of Navigation and Observationvol 2013 Article ID 570964 13 pages 2013
[19] S-H Fang and T-N Lin ldquoIndoor location system based ondiscriminant-adaptive neural network in IEEE 80211 environ-mentsrdquo IEEETransactions onNeural Networks vol 19 no 11 pp1973ndash1978 2008
[20] N Qian ldquoOn the momentum term in gradient descent learningalgorithmsrdquo Neural Networks vol 12 no 1 pp 145ndash151 1999
[21] K Gopalsamy ldquoStability of artificial neural networks withimpulsesrdquo Applied Mathematics and Computation vol 154 no3 pp 783ndash813 2004
[22] H Zou X Lu H Jiang and L Xie ldquoA fast and precise indoorlocalization algorithm based on an online sequential extremelearning machinerdquo Sensors vol 15 no 1 pp 1804ndash1824 2015
[23] C Y J So J-Y Lee C-H Yoon and H Park ldquoAn improvedlocation estimation method for Wifi fingerprint-based indoorlocalizationrdquo International Journal of Software Engineering andIts Applications vol 7 no 3 pp 77ndash86 2013
[24] Z Farid R Nordin W M A W Daud and S Z HasanldquoLeveraging existing WLAN infrastructure for wireless indoorpositioning based on fingerprinting and clustering techniquerdquoin Proceedings of the 13th International Conference on Electron-ics Information and Communication (ICEIC rsquo14) pp 1ndash4 KotaKinabalu Malaysia January 2014
[25] InSSIDer by metageek httpwwwmetageeknet[26] J S Lee and Y M Wang ldquoExperimental evaluation of ZigBee-
based wireless networks in indoor environmentsrdquo Journal ofEngineering vol 2013 Article ID 286367 9 pages 2013
[27] S K Gharghan R Nordin and M Ismail ldquoEnergy-efficientZigBee-based wireless sensor network for track bicycle perfor-mancemonitoringrdquo Sensors vol 14 no 8 pp 15573ndash15592 2014
[28] XBeeXBee-pro RF Modules 2015 httpwwwdigicom[29] A Baniukevic C S Jensen andH Lu ldquoHybrid indoor position-
ingwithWi-Fi and bluetooth architecture and performancerdquo inProceedings of the IEEE 14th International Conference on MobileData Management (MDM rsquo13) pp 207ndash216 IEEE Milan ItalyJune 2013
[30] Z Xiong Z Song A Scalera et al ldquoHybrid WSN and RFIDindoor positioning and tracking system RFID and near fieldcommunications in embedded systemsrdquo EURASIP Journal onEmbedded Systems vol 2013 article 6 2013
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

2 Mobile Information Systems
storage warehouses Nowadays distribution companiesmakeuse of visual tracking of coloured paths on the floor and ofspecific markings in their warehouses With wireless indoorlocalization the motion can be based on hybrid localizationOur system can provide the added advantage of a largermotion freedom and improved positional awareness in casethe fixed (or conventional) tracking is lost
Considering the wide deployment ofWiFi and the poten-tial of WSNs in pervasive and context-aware applicationstheir combined utilization is attracting increasing attentionin location-based services (LBSs) In the context of indoorpositioning data from both WiFi and WSN systems can becollected and exploited to refine and enhance the derivationof location information In our work we design and evaluatehybrid indoor position system which combines WLANAccess Point andWireless Sensor Network (WSN) technolo-gies The main purpose of using hybrid indoor localizationapproach is to get better accuracy with fast processing timeto locate the userobject in the indoor environment keepingin view the stability of our algorithm too
The proposed hybrid technique implements indoor local-ization that adopts fingerprinting approaches in both WiFiand Wireless Sensor Networks (WSNs) This model exploitsmachine learning techniques for position calculation In par-ticular artificial neural network (ANN) based on the gradientdescent with momentum (ANN-GDM) back-propagationlearning is used [5] A dataset of location fingerprints in termsof RSS measurements is used to train an ANN and builda classification model In essence this model can map thecollected RSS signal to the position coordinate (longitude andlatitude) of themobile node Two outputs were obtained fromthe ANN one corresponds to WLAN fingerprinting and theother one corresponds to WSN motesrsquo values
Besides this selection of using ANN approach is becauseof its robustness against noise and interference which is oneof the major factors affecting the accuracy of indoor positionsystem [6] Two sets of experiments were conducted in areal indoor environment using the individual technologies ofWiFi andWSN Furthermore Genetic Algorithm (GA) basedoptimization [7] is also implemented to check the accuracyimprovement In GA case it did not incur any improvementto the accuracy in this hybrid formation Compared to theperformance of GA optimization the nonoptimized ANN-GDM performed better in terms of accuracy precisionstability and computational time
The study is organized into four parts the first part of thestudy discusses the previous related works the second partdiscusses ANN third part discuss proposed hybrid local-ization system the fourth part comprises the results anddiscussion and the last part discusses conclusion and futurework
2 Previous Related Works
Several efforts have been done to develop location determina-tion systems based on RSS signals from a single wireless tech-nology Techniques such as Bayesian classification and filter-ing 119870-Nearest Neighbors GPS-like triangulation KalmanFiltering neural networks and support vector machine
(SVM) have been employed for solving this problem [8ndash10]However positioning systems based on a single technologyare ineffective in getting better accuracy and availability Forthis reason several researchers have attempted to use hybridpositioning systems in indooroutdoor localization scenariostowards getting better position accuracy and availability byexploiting the capabilities of different wireless technologies
A survey of hybrid schemes for location estimation inWireless Sensor Networks has been presented in detail in[8] Zhang et al [11] proposed an RF-based hybrid approachldquoCOCKTAILrdquo which combined WSNs and RFID technolo-gies The model described the relation between variations inRSS and the target and it utilizes the geometric method aswell as the dynamic cluster based probabilistic cover algo-rithm to solve device-free localization problem WiFi posi-tioning is combined with pedestrian dead reckoning (PDR)systems in [12] A hybridization of these two technologiesovercomes the fluctuation of RSS-basedWiFi positioning dueto the fluctuation of RSSs and the accumulation of error overtime in PDR system
Another research work is presented on hybrid indoorlocalization system based on pyroelectric infrared (PIR)sensors and RF model [13] This hybrid model works in twostages In the first stage the zone of the target person isidentified by PIR sensors In stage two RF fingerprints withinthe identified zone will be processed to estimate the finalposition of the person
Li et al [14] presented a hybrid approach for track-ing moving objects utilizing fingerprinting and RSS-basedtechniques which are fused using RFID tagsreaders andparticle filtering A mean error of about 13m accuracy wasachieved Another hybrid localization system by Bahillo et al[15] implemented an RTTmeasurement method using 80211WLAN transceivers and the robust least-squared multilat-eration (RLSM) technique A custom printed circuit board(PCB) was used for time measurements Position accuracy oflower than 3mwas achievedMoreover Cheng et al [16] pro-posed a hybrid approach using 119870-medoids clustering algo-rithm to partition the set of fingerprints into several subsetsand train a multicategory support vector machine (SVM)on each subset data The authors concluded that this hybridapproach could be used to solve 3DWLAN indoor position-ing
A monitoring system based on PIR sensors and RF basedon indoor humanrobot localization is proposed in [17] Thistechnique fuses the location information obtained from RFpropagation model and PIR RF propagation model is usedfor the position of target estimation and it is assumed to bedistributed in someprobable regionThe authors useCramer-Rao bound (CRB) to determine the probable region
Another research work presented an indoor position-ing system that integrated fingerprinting and trilaterationapproaches [18] An online phase of fingerprinting is firstused in which the nearest neighbors (NN) of the target nodeare calculated Later on the trilateration approach is used toestimate the coordinate without the use of radio propagationmodelThe distance between the calculated NN and detectedaccess points (AP) is estimated using the Euclidian distanceproviding the radii for the trilateration approach The mean
Mobile Information Systems 3
b
InputsSum
function
Activation function
(net)jOutput
Gradient decent back-propagation
Activation function
Target
Normalized hybrid training data
minus
X1
X2
Xn
sumWijXj
h1
h2
h3
hn
sumWabhb
Figure 1 Gradient decent with momentum back-propagation neural network
error of this proposed approach was only 199 and 140metersfor 3 and 4 anchor nodes respectively
3 Artificial Neural Network
Artificial neural networks (ANNs)method assumes that RSSscannot be analyzedmathematically because they are too com-plex ANNs use nonlinear discriminant functions for classi-fication Due to the powerful learning and adaptive capabil-ities ANN technique has been employed in the positioningapplications especially in fingerprinting technique [19] Awidely used ANN structure among modelers is the feed-forward back-propagation neural network It is also consid-ered one of the simplest and most general methods used forsupervised trainingMany different varieties of learning algo-rithms are available including the popular back-propagationlearning algorithm [3]
31 Implementation of Gradient Decent with MomentumBack Propagation In this work a two-layer artificial neu-ral network with gradient decent with momentum back-propagation learning algorithmwas used in the online phasewhich is the actual estimation of indoor position The gra-dient descent with momentum back-propagation algorithmis an iterative gradient method based algorithm developedto introduce synaptic correction (or weight adjustments) byminimizing the sum of square errors (the objective function)Themomentum term helps average out the oscillation occur-ring during the training process and improving the speedof convergence [20] The normalized RSS signal from twotechnologies which are used as training patterns are fed asinput to the ANN together with location coordinates (119909 119910)fingerprinting patterns that are used as target values duringthe training phase and form the required output of the ANNduring the online phase The ANN structure is shown inFigure 1Theproposed systemwas implemented inMATLAB
We implement the position algorithm based on gradientdecent with momentum back-propagation in the followingsteps
(i) Feed-forward computation
(ii) Back-propagation to the output layer and weightadjustment
(iii) Back-propagation to the hidden layer and weightadjustment
(iv) Global position error calculation
311 Feed-Forward Computation Hybrid training patternsare fed to the input layers of the neural network architecturewhich are multiplied with the weighted sum of the inputlayers to 119895th node in the hidden layer which is given by
net (119910) =119899
sum
119894=1
119908119894119895119909119895 (1)
After the training step of neural networks appropriateweights are obtained A multilayer perceptron network withtwo hidden layers is used for the ANN-based positioning sys-tem The input vector of signal strengths is multiplied by thetrained inputweightmatrix and then added to input layer biasas shown in
net (y)=nsum
i=1wij119909119895 + 119887 (2)
The result is transmitted to the activation function (sig-moid) of the hidden layer neuron as in
net (119910) = sigmod(119899
sum
119894=1
119908119894119895119909119895+ 119887) (3)
312 Back-Propagation to the Output Layer and WeightAdjustment Theoutput of this transfer function ismultipliedby the trained hidden layer weight matrix and then addedto the hidden layer bias The output of the system is theestimated location as shown in
120575119896= (119905119896minus 119900119896) 119900119896(1 minus 119900
119896) (4)
where 119905119896is actual activation value of the output node 119896 119900
119896=
Expected target output for node 119896 and 119900119896(1minus119900119896) =Derivative
of the Sigmoid function
4 Mobile Information Systems
Table 1 ANN designed parameters
Parameters Value RemarksNumber of inputs 6 WiFi 3 WSN 3Number of hidden layers 2 Log-Sigmoid activation functionNumber of outputs 2 Linear activation function
Number of neurons in hidden layers 15 For layer 118 For layer 2
Learning rate (119868119903) 001 Three learning rate is used for each layer
Momentum rate (120583) 06 Three momentum rate is used for each layerTarget error (goal) 0001m
The weight adjustment 119908119895119896 between the output node 119896
and the node 119895 is shown in
Δ119908119899
119895119896= 119868119903120575119896119909119896+ Δ119908(119899minus1)
119895119896120583 (5)
where 119868119903is learning rate and 120583 is momentum
313 Back-Propagation to the Hidden Layer and WeightAdjustment The error signal for hidden nodes is calculatedby adjusting the weight 119908
119894119895 between the input node 119894 and
the node 119895 which are calculated as
119908119895119894= 119908119894119895+ 119868119903120575119895119909119895+ Δ119908(119899minus1)
119895119894120583 (6)
314 Global Position Error Calculation Target data requiresnormalization before feed to ANN 119883 and 119884 coordinates arein meters with a range from minus25 to 25m 119883 and 119884 rangesabove refer to the extension of the space where the measure-ments were taken Besides this 119883 and 119884 must be normal-izing between 0 and 1 according to this linear transformation
997888rarr119883119895norm =
25lowast (04) + (05) (7)
As minus25 lt 119883119895lt 25 minus gt 01 lt 119883
119895norm lt 09
norm =
25lowast (04) + (05) (8)
As the input is the RSS signal from the four access pointsthe target training (testing) data is defined as in
Target 119905119895= 119883119895 119884119895 (9)
Output is shown in
119874119895= 119883119895 out 119884119895 out (10)
By inverting the formulas we get total positioning error asshown in (11)
Error = 25
04(119883119869 out minus 119883119895 target)
25
04(119884119869 out minus 119884119895 target) (11)
Mean ErrorPosition ⟨100381710038171003817100381710038171003817
997888997888997888997888997888997888997888997888997888997888997888Errorposition 119895100381710038171003817100381710038171003817⟩ (12)
where mean extends over all training data and⟨997888997888997888997888997888997888997888997888997888997888997888Errorposition 119895⟩ is the vector normalized The important
factor to achieving better results from ANN model is tuningits parameters However there is no definite and explicitmethod to select optimal parameters for the ANN Trialand error method is commonly used to choose appropriateANN parameters [21] Many parameters are involved intuning the ANN including the number of hidden layers thenumber of neurons in each hidden layer initial weights tostart the training the transfer function learning rate and themomentum rate The parameters of the back-propagationmethod which give the least error are given in Table 1
32 Pseudo Code for Implementing Back-Propagation inIndoor The proposed two-layer artificial neural networkwith gradient descent with momentum back-propagationpseudo code to calculate the position estimation is shown inPseudocode 1 We first compute the feed-forward computa-tion to compute all the activations and output value through-out the network Then back-propagation process startsbetween output layer and hidden layer with weight adjust-ments At last global position error calculation is done
4 Proposed Hybrid IndoorLocalization System
Numerous wireless communication techniques have beenwidely used in developing the indoor positioning systemThese techniques include the wireless local area network(WLAN) radio frequency identification (RFID) bluetoothand wireless sensor network (WSN) With the expansionof free WLAN services and popularity of smartphoneslocation-based services have drawn benefits for many appli-cations WLAN coverage can be found in common placessuch as homes shopping mall offices or campuses InadditionWLAN networks and devices have recently becomecheaper Hence there is no need to employ any additionalhardware and infrastructure for the purpose of indoor track-ing Using WiFi for indoor localization two approaches aremainly used a model-based approach and a fingerprinting-based approach [22]
The model-based method relies on the indoor path-lossmodel to estimate user location Using a path-loss modelsuch as log-distancemodel the relation between transmittingdistance and RSSI could be established and the user location
Mobile Information Systems 5
(1) initialize the ANN model(a) 119871119903= 119909 initialize the learning rate
(b) 120583 = 119910 initialize the momentum(c) for each weight 119908
119908 = rand () initialize the weight with small random number
(2) while (number of iterations ltMAX and distance error gt 120576) training loop MAX and 120576 are constant threshold valuesfor each pattern in the training set
for each layer in the ANN
for each node 119899 in the layer (a) Calculate weighted sum of inputs to 119899 (Equation (1))(b) Add the bias value to the calculated sum (Equation (2))(c) Calculate the activation function for 119899 (Equation (3))
Back propagate error through output layer (Equation (4))Back propagate error through hidden layer (Equation (5))for each weight 119908
Update 119908 (Equation (6))
Calculate distance error (Equation (11)) Equation (12) for testing data
(3) Repeat Step (2) for the testing dataset
Pseudocode 1
is computed using triangulation On the other hand locationfingerprinting utilizes the received signal strength (RSS) fromseveral Wireless Access Points (WAPs) or sensor nodes tomap the signals features measured at some location (119909 119910)
into the coordinates of that location creating a sort of signalidentifier or a fingerprint for each location and stored in adatabase called ldquoradio maprdquo A pure model-based methodwhich does not rely on a radio map shows very low accuracydue to the fading characteristics of the wireless channelWalls objects and people moving around all distort the sig-nal and the received signal strength deviates from the model[23] Our work focuses on the fingerprinting-based model
The proposed hybrid positioning system adopts finger-printmatching as the basic scheme of location determinationLocation fingerprinting utilizes the received signal strength(RSS) from several Wireless Access Points (WAPs) or sensornodes to map the signals features measured at some location(119909 119910) into the coordinates of that location creating a sortof signal identifier or a fingerprint for each location Thefingerprinting method consists of two phases [24] Phase 1is the so-called calibration phase offline phase or trainingphase in which received signal features from all WAPs orsensor nodes at selected locations in a building are recordedin a database called ldquoradio maprdquo as a function of the userrsquoslocation information (latitude longitude)
Phase 2 is the localization phase or online phase inwhich the location of an object is determined by applying apattern-matching algorithm (an ANN model in our case) tomatch the real-time (online) measurements of RSS with theclosest location that can be found in the radio map database
This method does not require specialized hardware in eitherthe mobile device or the receiving end nor is time synchro-nization necessary between the stationsThemajor drawbackof the fingerprinting approach is the laborious and time-consuming calibration process The fingerprinting workingflow diagram is shown in Figure 2
41 Experimental Setup Initial data collection and analysisare the first step for location fingerprinting implementationExperimental data of RSS samples from both IEEE 80211bg-based WAPs and ZigBee (XBee S2) sensor nodes werecollected in the basement of the Faculty of Engineering andBuilt Environment National University of Malaysia (UKM)Malaysia to represent the indoor environment Experimentalarea is surrounded by various laboratories long corridorslecture halls offices and meeting rooms The layout of theexperimental area is shown in Figure 3
The measurement set consisted of a laptop computerLenovo G580 with a core i5 processor an onboard AtherosAR9285 Wireless Adaptor for the collection of RSS sampleswith Windows 7 operating system An adjustable (height)moving table was used to carry the computer at several fixedpredetermined heights The measurement operation con-sisted of nearly uniformly distributed anchor pointswhich are1 meter apart in 119883 direction and 15 meters apart in 119884
direction For hybrid RSS data collection we marked a totalof 96 anchor points fromwhich we collect hybrid data for fin-gerprinting implementation The study area is mapped withCartesian coordinates system with the starting coordinate as(0 0)
6 Mobile Information Systems
Anchor point-1
Anchor point-2
Offline phase collection of fingerprint
Online phase localization
(x y)
(x y)
(x y)
(x y)
(x y)
(x y)
Mobile unitAnchor point-3
Anchor point-n
Artificial neural network with gradient decent with
momentum learning
Mobile user position
RSS data from WAPs
RSS data from WSN motes
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
Figure 2 ANN-based fingerprinting localization
Lab
Study seats
Lab
Lab
Lab
Lab
96 anchor points marked
WAPs
1m2m
2m
2m
2m
15m
10m
150m
28m
WSN nodes distance from ground level is 150 cm
Figure 3 Experimental area layout
42 Data Collection from WAPs Four WAPs were used tocollect the RSS data for location estimation Those WAPsformed the existingWLAN communication infrastructure of
the building near the experimental area Positions of accesspoints are not changed The use of a real communicationinfrastructure enables the identification of practical limita-tions and difficulties and ensures a fair evaluation underrealistic operating conditions Open WiFi Scanner softwareldquoinSSIDerrdquo [25] was used for collecting and analyzing RSSIvaluesThemodificationwasmade in the ldquoinSSIIDerrdquo to showthe time stamps and to save the RSS data in text format withMAC address along with signal strength values Data werecollected during a working day More than 100 RSS sampleswere collected at each anchor point (running ldquoinSSIDerrdquo soft-ware for about 2min) Signal fluctuations were suppressedby computing the average RSS from 50 samples
43 Data Collection from WSN Devices The data measure-ment and transfer from WSN devices used two types of Zig-Bee nodes (XBee series 2) [26] the sensor nodes (to transmitthe RSS data) and a coordinator node (to receive RSS data)Four sensor nodes were placed at four corners in of the exper-imental area mounted on a surface 15m above the groundA sensor node has four basic components a magnetic sensorwith a small permanent magnet an ATmega 328P microcon-troller as a Barebone a ZigBee module (XBee series 2) and apower unit (LiPo rechargeable battery 37 v1000mAh) [27]
On the other hand the coordinator which collects RSSdata from sensor nodes is attached to the laptop which is90 cm above ground in the default setting The coordinatorhas four components an Arduino Mega board based on theMega 2560 microcontroller a liquid crystal display (LCD)a ZigBee module (XBee series 2) and a power unit (LiPo
Mobile Information Systems 7
Artificial neural network(gradient decent with
WiFi indoor scenario WSN indoor scenario
Sensor components
RSS data collector
ANN outputs
Sensor node
Coordinator
12345678
12345678
momentum)
1m1m
Figure 4 Proposed hybrid indoor localization system
rechargeable battery 74 v1000mAh) The X-CTU softwarefrom DIGI International [28] was used to configure thesensor node with the microcontroller and the coordinatornode to establish a communication protocol between the twoZigBee nodes for transmitting and receiving of RSS data Inthe first scenario RSS training data is collected and stored ina database In the second scenario from the pool of trainingdata a small test portion data is randomly selected (inpercentage) and given to the ANN for testing purposes Twooutputs were obtained from the ANN one corresponds toWLANfingerprinting and the other one corresponds toWSNmotesrsquo values The proposed hybrid architecture is shown inFigure 4
5 Results and Discussion
To evaluate the performance of a positioning system twoparameters are used accuracy and precision The accuracyof the system is expressed in terms of the positioning errorwhich is obtained from a test dataset The test data contain acollection of fingerprints associated with a location the posi-tioning algorithm processes each fingerprint and attempts to
calculate the corresponding locationThe obtained estimatedlocation is compared with the real location by calculating theEuclidean distance between the two to obtain the deviationbetween the original and the estimated values The averagepositioning error relies on the true and estimated locationto calculate a value that correctly expresses the accuracy ofthe system Usually the error between the two positions isexpressed in meters or centimeters
Figure 5 shows the location of the actual 119909-119910 coordinatesand estimated 119909-119910 coordinates of the test data as calculatedby the ANN-GDM algorithmThe test dataset was randomlyselected from the training dataset The resulting positionerror would be approximately 136m with signals fromWSNalone and 122mwith signals fromWiFi only However whencombining both signals in the hybrid setting the positionerror does not exceed 105 outperforming the cases of signalsfrom individual technologies Figure 6 shows the actual andestimated 119909-119910 coordinates of the training dataset during theoffline phase which stops training after reaching a prespeci-fied value of error
The accuracy of a learning algorithm can be improvedby spending more time in tuning its performance which is
8 Mobile Information Systems
Actual positionEstimated position
0
5
10
15
20
25
Y (m
)
5 0 minus510X (m)
(a) WiFi
Actual positionEstimated position
5 0 minus510X (m)
0
5
10
15
20
25
Y (m
)
(b) WSN
Actual positionEstimated position
4 3 2 15X (m)
15
16
17
18
19
20
21
22
23
Y (m
)
(c) Hybrid
Figure 5 Actual and estimated mean position of the testing dataset of two wireless technologies alone and with hybrid formation
HybridWSNWiFi
101 102 103 104 105 106100
Total number of iterations
0
5
10
15
20
25
30
35
Dist
ance
erro
r (m
)
Figure 6 Training positioning error versus a number of trainingiterations
achieved by allowing a large number of training iterationsin the case of ANN This tradeoff between the accuracy andcomputational time is illustrated in Figure 7
The second parameter of evaluation is defined as thesuccess probability of position calculation with respect topredefined accuracy To evaluate our system with respectto both parameters we present the Cumulative DistributionFunction (CDF) of the error (the difference between the realand calculated location coordinates) Figure 8 shows the CDFplot of the distance error for optimally trained ANN modelRunning the positioning system using the test dataset 50 ofthe time the resulting position error would be approximately14m with signals from WSN alone and 13m with signals
10 5 0 minus5 minus1015X-distance (m)
0
5
10
15
20
Y-d
istan
ce (m
)
Figure 7Actual and estimatedmeanposition of the training datasetbased on hybird
from WiFi only However when combining both signals inthe hybrid setting the position error does not exceed 12m ata probability of 50 outperforming the cases of signals fromindividual technologies
In an attempt to further improve the system accuracywe tried to use GA to optimize the ANN parameters andthereby enhance its performance However the nonopti-mized ANN-GDM performance remained the best choicein terms of accuracy precision stability and computationaltime Applying GA-based optimization in this case did not
Mobile Information Systems 9
Empirical CDF
WiFiWSNHybrid
05 1 15 2 25 30Position error (m)
0010203040506070809
1
CDF
()
Figure 8 CDF localization error of proposed hybrid system
Comparison between ANN-GDM and ANN-GA
ANN-GDMANN-GA
0
5
10
15
20
25
Dist
ance
erro
r (m
)
101 102 103 104 105 106 107100
Epoch
Figure 9 Positioning error versus number of epochs with andwithout GA optimization
incur the expected improvement despite providing a similardecrease in the training error Figure 9 shows the accuracyand computational time in both cases as a function of thenumber of allowed training epochs
The stability of a learning algorithm is one of the impor-tant factors in the neural network [21] It can be defined ashow changes to the training data influence the result of thealgorithm by running the algorithm with same parametersseveral times To evaluate our algorithm to be stable weran the network learning code with various training dataseveral times with the parameters kept constant (hiddennodes learning and momentum rates and initial weights)and the accuracy reached roughly the same value as shownin Figure 10 The value of the distance error as a functionof the number of iterations for four selected training runs isshown in Figure 10 All profiles are roughly the same for allthe performed runs
6 Performance Comparison
The performance of the hybrid indoor localization approachis summarized and compared with several similar research
Position error 1Position error 2
Position error 3Position error 4
101 102 103 104 105 106100
Number of iterations
0
5
10
15
20
25
Dist
ance
erro
r (m
)
Figure 10 Stability analysis of training algorithm
works in Table 2 The considered studies adopted the fin-gerprinting approach for localization and are based on two-dimensional data acquisition When the WiFi and WSN sig-nals are considered separately we achieved average distanceerrors of 122m (using 228 anchor points) and 135m (using96 anchor points) respectively As expected using a largernumber of anchor points a better approximation can beobtained These results show already a better accuracy withrespect to other recently published works Our proposedhybrid indoorWiFi-WSNpositioning system outperforms allprevious results providing an accuracy of 105m when using96 anchor points
7 Conclusion and Future Works
This paper presented a hybrid WiFi-WSN based indoorpositioning system based on the received signal strengthin wireless networks for the purpose of producing bet-ter localization accuracy The joint use of heterogeneoustechnologies can overcome the limitations of each technol-ogy We employed an ANN model using gradient descentwith momentum learning algorithm for location predictiontrained and tested in a heterogeneous environment We alsoconducted an extensive set of experiments in the real indoorscenario to evaluate the performance of our proposal Resultswere derived with and without GA optimization techniquein terms of accuracy precision stability and computationaltime In addition the accuracy of the proposed hybrid indoorpositioning system was compared with other well-knownhybrid systems (probabilistic and deterministic) which havebeen used for indoor localization The hybrid indoor posi-tioning system presented in this paper had the advantage ofbetter accuracy low cost and easy expansibility We believethe system can be used to locate people and assets in severalfields including those of logistics healthcare and manu-facturing Our planned future work includes the extensionof the current research into implementations of hybrid 3Dindoor environments in amultifloor scenario In addition theproposed algorithmwill be evaluated over a larger area to testthe robustness of the algorithm
10 Mobile Information Systems
Table 2 Comparison between the proposed hybrid indoor positioning system and previous hybrid indoor positioning studies
Reference Hybrid positionsystems Type of study Test area Total number of
anchor points Accuracy Implementation
[12] WSN + RFID Experimental 5 times 30m 148(approx) 16m
Fingerprinting +extended Kalmanfilter approach
[29] WiFi +bluetooth
Experimental ampsimulation 50m 24 175m Fingerprinting
approach
[30] WiFi + RFID Experimental 25 times 12m 80(approx) 16m
Fingerprinting +particle filterapproach
Our WiFidata (alone) WiFi Experimental 25 times 28 228 122
Fingerprinting +artificial neural
network
Our WSNdata (alone) WSN Experimental 10 times 28 96 136
Fingerprinting +artificial neural
networkProposedhybridindoorsystem
WiFi + WSN Experimental 10 times 28m 96 105mFingerprinting +artificial neural
network
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors acknowledge support from Grant Ref no GUP-2014-005 and Universiti Kebangsaan Malaysia
References
[1] S Joana Halder and W Kim ldquoA fusion approach of RSSI andLQI for indoor localization system using adaptive smoothersrdquoJournal of Computer Networks and Communications vol 2012Article ID 790374 10 pages 2012
[2] Z Xiong Hybrid and cooperative positioning solutions forwireless networks [PhD thesis] 2014
[3] S C Mukhopadhyay ldquoWearable sensors for human activitymonitoring a reviewrdquo IEEE Sensors Journal vol 15 no 3 pp1321ndash1330 2015
[4] G Ciuti L Ricotti A Menciassi and P Dario ldquoMEMS sensortechnologies for human centred applications in healthcarephysical activities safety and environmental sensing a reviewon research activities in Italyrdquo Sensors vol 15 no 3 pp 6441ndash6468 2015
[5] G P Zhang ldquoNeural networks for classification a surveyrdquo IEEETransactions on Systems Man and Cybernetics Part C Applica-tions and Reviews vol 30 no 4 pp 451ndash462 2000
[6] H Mehmood N K Tripathi and T Tipdecho ldquoIndoorpositioning system using artificial neural networkrdquo Journal ofComputer Science vol 6 no 10 pp 1219ndash1225 2010
[7] J McCall ldquoGenetic algorithms formodelling and optimisationrdquoJournal of Computational and AppliedMathematics vol 184 no1 pp 205ndash222 2005
[8] Y Liu and Z Yang Location Localization and LocalizabilityLocation-Awareness Technology for Wireless Networks Springer2010
[9] J Yiming ldquoIndoor location determinationrdquo in Location-BasedServices Handbook CRC Press New York NY USA 2010
[10] A De Gante and M Siller ldquoA survey of hybrid schemesfor location estimation in wireless sensor networksrdquo ProcediaTechnology vol 7 pp 377ndash383 2013
[11] D Zhang Y Yang D Cheng S Liu and LM Ni ldquoCOCKTAILan RF-based hybrid approach for indoor localizationrdquo in Pro-ceedings of the IEEE International Conference on Communica-tions (ICC rsquo10) pp 1ndash5 May 2010
[12] L-H Chen E H-K Wu M-H Jin and G-H Chen ldquoIntel-ligent fusion of Wi-Fi and inertial sensor-based positioningsystems for indoor pedestrian navigationrdquo IEEE Sensors Journalvol 14 no 11 pp 4034ndash4042 2014
[13] M A Bitew R-S Hsiao H-P Lin and D-B Lin ldquoHybridindoor human localization system for addressing the issueof RSS variation in fingerprintingrdquo International Journal ofDistributed Sensor Networks vol 2015 Article ID 831423 9pages 2015
[14] J Li B Zhang H Liu L Yu and Z Wang ldquoAn indoor hybridlocalization approach based on signal propagation model andfingerprintingrdquo International Journal of Smart Home vol 7 no6 pp 157ndash170 2013
[15] A Bahillo S Mazuelas R M Lorenzo et al ldquoHybrid RSS-RTTlocalization scheme for indoor wireless networksrdquo EURASIPJournal on Advances in Signal Processing vol 2010 Article ID126082 2010
[16] J Cheng Y Cai Q Zhang J Cheng and C Yan ldquoA new three-dimensional indoor positioning mechanism based on wirelessLANrdquoMathematical Problems in Engineering vol 2014 ArticleID 862347 7 pages 2014
[17] R C Luo and O Chen ldquoWireless and pyroelectric sensoryfusion system for indoor humanrobot localization and mon-itoringrdquo IEEEASME Transactions on Mechatronics vol 18 no3 pp 845ndash853 2013
Mobile Information Systems 11
[18] F Subhan H Hasbullah and K Ashraf ldquoKalman filter-basedhybrid indoor position estimation technique in bluetoothnetworksrdquo International Journal of Navigation and Observationvol 2013 Article ID 570964 13 pages 2013
[19] S-H Fang and T-N Lin ldquoIndoor location system based ondiscriminant-adaptive neural network in IEEE 80211 environ-mentsrdquo IEEETransactions onNeural Networks vol 19 no 11 pp1973ndash1978 2008
[20] N Qian ldquoOn the momentum term in gradient descent learningalgorithmsrdquo Neural Networks vol 12 no 1 pp 145ndash151 1999
[21] K Gopalsamy ldquoStability of artificial neural networks withimpulsesrdquo Applied Mathematics and Computation vol 154 no3 pp 783ndash813 2004
[22] H Zou X Lu H Jiang and L Xie ldquoA fast and precise indoorlocalization algorithm based on an online sequential extremelearning machinerdquo Sensors vol 15 no 1 pp 1804ndash1824 2015
[23] C Y J So J-Y Lee C-H Yoon and H Park ldquoAn improvedlocation estimation method for Wifi fingerprint-based indoorlocalizationrdquo International Journal of Software Engineering andIts Applications vol 7 no 3 pp 77ndash86 2013
[24] Z Farid R Nordin W M A W Daud and S Z HasanldquoLeveraging existing WLAN infrastructure for wireless indoorpositioning based on fingerprinting and clustering techniquerdquoin Proceedings of the 13th International Conference on Electron-ics Information and Communication (ICEIC rsquo14) pp 1ndash4 KotaKinabalu Malaysia January 2014
[25] InSSIDer by metageek httpwwwmetageeknet[26] J S Lee and Y M Wang ldquoExperimental evaluation of ZigBee-
based wireless networks in indoor environmentsrdquo Journal ofEngineering vol 2013 Article ID 286367 9 pages 2013
[27] S K Gharghan R Nordin and M Ismail ldquoEnergy-efficientZigBee-based wireless sensor network for track bicycle perfor-mancemonitoringrdquo Sensors vol 14 no 8 pp 15573ndash15592 2014
[28] XBeeXBee-pro RF Modules 2015 httpwwwdigicom[29] A Baniukevic C S Jensen andH Lu ldquoHybrid indoor position-
ingwithWi-Fi and bluetooth architecture and performancerdquo inProceedings of the IEEE 14th International Conference on MobileData Management (MDM rsquo13) pp 207ndash216 IEEE Milan ItalyJune 2013
[30] Z Xiong Z Song A Scalera et al ldquoHybrid WSN and RFIDindoor positioning and tracking system RFID and near fieldcommunications in embedded systemsrdquo EURASIP Journal onEmbedded Systems vol 2013 article 6 2013
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
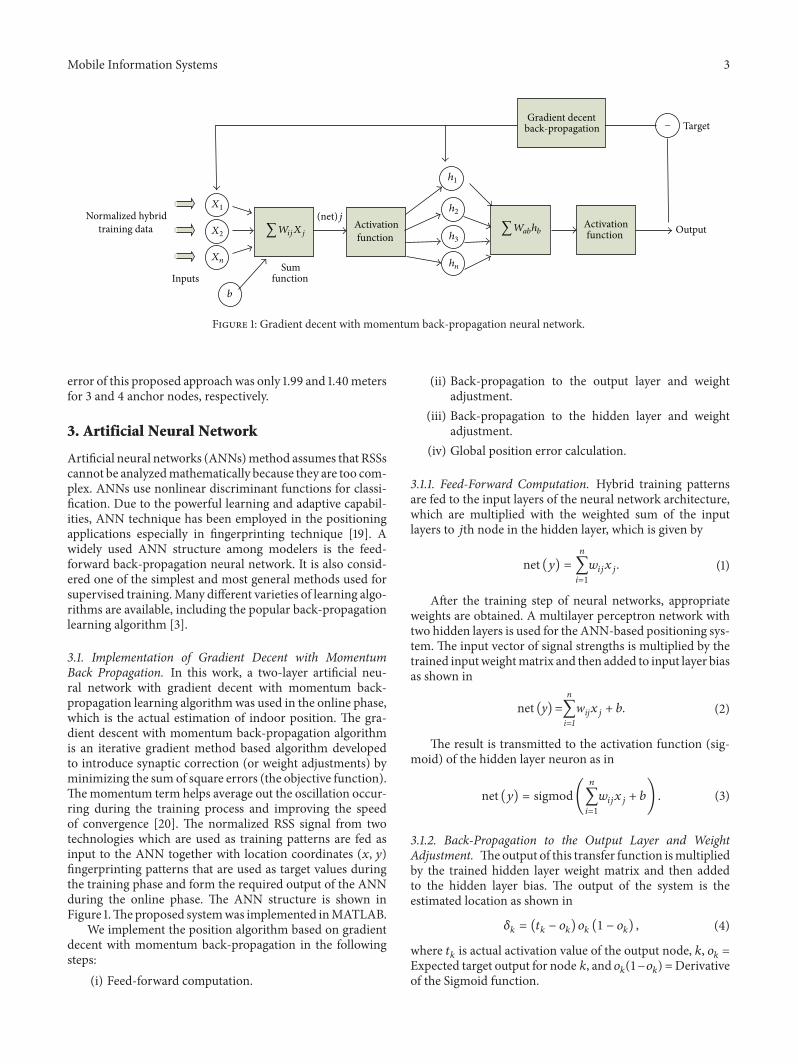
Mobile Information Systems 3
b
InputsSum
function
Activation function
(net)jOutput
Gradient decent back-propagation
Activation function
Target
Normalized hybrid training data
minus
X1
X2
Xn
sumWijXj
h1
h2
h3
hn
sumWabhb
Figure 1 Gradient decent with momentum back-propagation neural network
error of this proposed approach was only 199 and 140metersfor 3 and 4 anchor nodes respectively
3 Artificial Neural Network
Artificial neural networks (ANNs)method assumes that RSSscannot be analyzedmathematically because they are too com-plex ANNs use nonlinear discriminant functions for classi-fication Due to the powerful learning and adaptive capabil-ities ANN technique has been employed in the positioningapplications especially in fingerprinting technique [19] Awidely used ANN structure among modelers is the feed-forward back-propagation neural network It is also consid-ered one of the simplest and most general methods used forsupervised trainingMany different varieties of learning algo-rithms are available including the popular back-propagationlearning algorithm [3]
31 Implementation of Gradient Decent with MomentumBack Propagation In this work a two-layer artificial neu-ral network with gradient decent with momentum back-propagation learning algorithmwas used in the online phasewhich is the actual estimation of indoor position The gra-dient descent with momentum back-propagation algorithmis an iterative gradient method based algorithm developedto introduce synaptic correction (or weight adjustments) byminimizing the sum of square errors (the objective function)Themomentum term helps average out the oscillation occur-ring during the training process and improving the speedof convergence [20] The normalized RSS signal from twotechnologies which are used as training patterns are fed asinput to the ANN together with location coordinates (119909 119910)fingerprinting patterns that are used as target values duringthe training phase and form the required output of the ANNduring the online phase The ANN structure is shown inFigure 1Theproposed systemwas implemented inMATLAB
We implement the position algorithm based on gradientdecent with momentum back-propagation in the followingsteps
(i) Feed-forward computation
(ii) Back-propagation to the output layer and weightadjustment
(iii) Back-propagation to the hidden layer and weightadjustment
(iv) Global position error calculation
311 Feed-Forward Computation Hybrid training patternsare fed to the input layers of the neural network architecturewhich are multiplied with the weighted sum of the inputlayers to 119895th node in the hidden layer which is given by
net (119910) =119899
sum
119894=1
119908119894119895119909119895 (1)
After the training step of neural networks appropriateweights are obtained A multilayer perceptron network withtwo hidden layers is used for the ANN-based positioning sys-tem The input vector of signal strengths is multiplied by thetrained inputweightmatrix and then added to input layer biasas shown in
net (y)=nsum
i=1wij119909119895 + 119887 (2)
The result is transmitted to the activation function (sig-moid) of the hidden layer neuron as in
net (119910) = sigmod(119899
sum
119894=1
119908119894119895119909119895+ 119887) (3)
312 Back-Propagation to the Output Layer and WeightAdjustment Theoutput of this transfer function ismultipliedby the trained hidden layer weight matrix and then addedto the hidden layer bias The output of the system is theestimated location as shown in
120575119896= (119905119896minus 119900119896) 119900119896(1 minus 119900
119896) (4)
where 119905119896is actual activation value of the output node 119896 119900
119896=
Expected target output for node 119896 and 119900119896(1minus119900119896) =Derivative
of the Sigmoid function
4 Mobile Information Systems
Table 1 ANN designed parameters
Parameters Value RemarksNumber of inputs 6 WiFi 3 WSN 3Number of hidden layers 2 Log-Sigmoid activation functionNumber of outputs 2 Linear activation function
Number of neurons in hidden layers 15 For layer 118 For layer 2
Learning rate (119868119903) 001 Three learning rate is used for each layer
Momentum rate (120583) 06 Three momentum rate is used for each layerTarget error (goal) 0001m
The weight adjustment 119908119895119896 between the output node 119896
and the node 119895 is shown in
Δ119908119899
119895119896= 119868119903120575119896119909119896+ Δ119908(119899minus1)
119895119896120583 (5)
where 119868119903is learning rate and 120583 is momentum
313 Back-Propagation to the Hidden Layer and WeightAdjustment The error signal for hidden nodes is calculatedby adjusting the weight 119908
119894119895 between the input node 119894 and
the node 119895 which are calculated as
119908119895119894= 119908119894119895+ 119868119903120575119895119909119895+ Δ119908(119899minus1)
119895119894120583 (6)
314 Global Position Error Calculation Target data requiresnormalization before feed to ANN 119883 and 119884 coordinates arein meters with a range from minus25 to 25m 119883 and 119884 rangesabove refer to the extension of the space where the measure-ments were taken Besides this 119883 and 119884 must be normal-izing between 0 and 1 according to this linear transformation
997888rarr119883119895norm =
25lowast (04) + (05) (7)
As minus25 lt 119883119895lt 25 minus gt 01 lt 119883
119895norm lt 09
norm =
25lowast (04) + (05) (8)
As the input is the RSS signal from the four access pointsthe target training (testing) data is defined as in
Target 119905119895= 119883119895 119884119895 (9)
Output is shown in
119874119895= 119883119895 out 119884119895 out (10)
By inverting the formulas we get total positioning error asshown in (11)
Error = 25
04(119883119869 out minus 119883119895 target)
25
04(119884119869 out minus 119884119895 target) (11)
Mean ErrorPosition ⟨100381710038171003817100381710038171003817
997888997888997888997888997888997888997888997888997888997888997888Errorposition 119895100381710038171003817100381710038171003817⟩ (12)
where mean extends over all training data and⟨997888997888997888997888997888997888997888997888997888997888997888Errorposition 119895⟩ is the vector normalized The important
factor to achieving better results from ANN model is tuningits parameters However there is no definite and explicitmethod to select optimal parameters for the ANN Trialand error method is commonly used to choose appropriateANN parameters [21] Many parameters are involved intuning the ANN including the number of hidden layers thenumber of neurons in each hidden layer initial weights tostart the training the transfer function learning rate and themomentum rate The parameters of the back-propagationmethod which give the least error are given in Table 1
32 Pseudo Code for Implementing Back-Propagation inIndoor The proposed two-layer artificial neural networkwith gradient descent with momentum back-propagationpseudo code to calculate the position estimation is shown inPseudocode 1 We first compute the feed-forward computa-tion to compute all the activations and output value through-out the network Then back-propagation process startsbetween output layer and hidden layer with weight adjust-ments At last global position error calculation is done
4 Proposed Hybrid IndoorLocalization System
Numerous wireless communication techniques have beenwidely used in developing the indoor positioning systemThese techniques include the wireless local area network(WLAN) radio frequency identification (RFID) bluetoothand wireless sensor network (WSN) With the expansionof free WLAN services and popularity of smartphoneslocation-based services have drawn benefits for many appli-cations WLAN coverage can be found in common placessuch as homes shopping mall offices or campuses InadditionWLAN networks and devices have recently becomecheaper Hence there is no need to employ any additionalhardware and infrastructure for the purpose of indoor track-ing Using WiFi for indoor localization two approaches aremainly used a model-based approach and a fingerprinting-based approach [22]
The model-based method relies on the indoor path-lossmodel to estimate user location Using a path-loss modelsuch as log-distancemodel the relation between transmittingdistance and RSSI could be established and the user location
Mobile Information Systems 5
(1) initialize the ANN model(a) 119871119903= 119909 initialize the learning rate
(b) 120583 = 119910 initialize the momentum(c) for each weight 119908
119908 = rand () initialize the weight with small random number
(2) while (number of iterations ltMAX and distance error gt 120576) training loop MAX and 120576 are constant threshold valuesfor each pattern in the training set
for each layer in the ANN
for each node 119899 in the layer (a) Calculate weighted sum of inputs to 119899 (Equation (1))(b) Add the bias value to the calculated sum (Equation (2))(c) Calculate the activation function for 119899 (Equation (3))
Back propagate error through output layer (Equation (4))Back propagate error through hidden layer (Equation (5))for each weight 119908
Update 119908 (Equation (6))
Calculate distance error (Equation (11)) Equation (12) for testing data
(3) Repeat Step (2) for the testing dataset
Pseudocode 1
is computed using triangulation On the other hand locationfingerprinting utilizes the received signal strength (RSS) fromseveral Wireless Access Points (WAPs) or sensor nodes tomap the signals features measured at some location (119909 119910)
into the coordinates of that location creating a sort of signalidentifier or a fingerprint for each location and stored in adatabase called ldquoradio maprdquo A pure model-based methodwhich does not rely on a radio map shows very low accuracydue to the fading characteristics of the wireless channelWalls objects and people moving around all distort the sig-nal and the received signal strength deviates from the model[23] Our work focuses on the fingerprinting-based model
The proposed hybrid positioning system adopts finger-printmatching as the basic scheme of location determinationLocation fingerprinting utilizes the received signal strength(RSS) from several Wireless Access Points (WAPs) or sensornodes to map the signals features measured at some location(119909 119910) into the coordinates of that location creating a sortof signal identifier or a fingerprint for each location Thefingerprinting method consists of two phases [24] Phase 1is the so-called calibration phase offline phase or trainingphase in which received signal features from all WAPs orsensor nodes at selected locations in a building are recordedin a database called ldquoradio maprdquo as a function of the userrsquoslocation information (latitude longitude)
Phase 2 is the localization phase or online phase inwhich the location of an object is determined by applying apattern-matching algorithm (an ANN model in our case) tomatch the real-time (online) measurements of RSS with theclosest location that can be found in the radio map database
This method does not require specialized hardware in eitherthe mobile device or the receiving end nor is time synchro-nization necessary between the stationsThemajor drawbackof the fingerprinting approach is the laborious and time-consuming calibration process The fingerprinting workingflow diagram is shown in Figure 2
41 Experimental Setup Initial data collection and analysisare the first step for location fingerprinting implementationExperimental data of RSS samples from both IEEE 80211bg-based WAPs and ZigBee (XBee S2) sensor nodes werecollected in the basement of the Faculty of Engineering andBuilt Environment National University of Malaysia (UKM)Malaysia to represent the indoor environment Experimentalarea is surrounded by various laboratories long corridorslecture halls offices and meeting rooms The layout of theexperimental area is shown in Figure 3
The measurement set consisted of a laptop computerLenovo G580 with a core i5 processor an onboard AtherosAR9285 Wireless Adaptor for the collection of RSS sampleswith Windows 7 operating system An adjustable (height)moving table was used to carry the computer at several fixedpredetermined heights The measurement operation con-sisted of nearly uniformly distributed anchor pointswhich are1 meter apart in 119883 direction and 15 meters apart in 119884
direction For hybrid RSS data collection we marked a totalof 96 anchor points fromwhich we collect hybrid data for fin-gerprinting implementation The study area is mapped withCartesian coordinates system with the starting coordinate as(0 0)
6 Mobile Information Systems
Anchor point-1
Anchor point-2
Offline phase collection of fingerprint
Online phase localization
(x y)
(x y)
(x y)
(x y)
(x y)
(x y)
Mobile unitAnchor point-3
Anchor point-n
Artificial neural network with gradient decent with
momentum learning
Mobile user position
RSS data from WAPs
RSS data from WSN motes
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
Figure 2 ANN-based fingerprinting localization
Lab
Study seats
Lab
Lab
Lab
Lab
96 anchor points marked
WAPs
1m2m
2m
2m
2m
15m
10m
150m
28m
WSN nodes distance from ground level is 150 cm
Figure 3 Experimental area layout
42 Data Collection from WAPs Four WAPs were used tocollect the RSS data for location estimation Those WAPsformed the existingWLAN communication infrastructure of
the building near the experimental area Positions of accesspoints are not changed The use of a real communicationinfrastructure enables the identification of practical limita-tions and difficulties and ensures a fair evaluation underrealistic operating conditions Open WiFi Scanner softwareldquoinSSIDerrdquo [25] was used for collecting and analyzing RSSIvaluesThemodificationwasmade in the ldquoinSSIIDerrdquo to showthe time stamps and to save the RSS data in text format withMAC address along with signal strength values Data werecollected during a working day More than 100 RSS sampleswere collected at each anchor point (running ldquoinSSIDerrdquo soft-ware for about 2min) Signal fluctuations were suppressedby computing the average RSS from 50 samples
43 Data Collection from WSN Devices The data measure-ment and transfer from WSN devices used two types of Zig-Bee nodes (XBee series 2) [26] the sensor nodes (to transmitthe RSS data) and a coordinator node (to receive RSS data)Four sensor nodes were placed at four corners in of the exper-imental area mounted on a surface 15m above the groundA sensor node has four basic components a magnetic sensorwith a small permanent magnet an ATmega 328P microcon-troller as a Barebone a ZigBee module (XBee series 2) and apower unit (LiPo rechargeable battery 37 v1000mAh) [27]
On the other hand the coordinator which collects RSSdata from sensor nodes is attached to the laptop which is90 cm above ground in the default setting The coordinatorhas four components an Arduino Mega board based on theMega 2560 microcontroller a liquid crystal display (LCD)a ZigBee module (XBee series 2) and a power unit (LiPo
Mobile Information Systems 7
Artificial neural network(gradient decent with
WiFi indoor scenario WSN indoor scenario
Sensor components
RSS data collector
ANN outputs
Sensor node
Coordinator
12345678
12345678
momentum)
1m1m
Figure 4 Proposed hybrid indoor localization system
rechargeable battery 74 v1000mAh) The X-CTU softwarefrom DIGI International [28] was used to configure thesensor node with the microcontroller and the coordinatornode to establish a communication protocol between the twoZigBee nodes for transmitting and receiving of RSS data Inthe first scenario RSS training data is collected and stored ina database In the second scenario from the pool of trainingdata a small test portion data is randomly selected (inpercentage) and given to the ANN for testing purposes Twooutputs were obtained from the ANN one corresponds toWLANfingerprinting and the other one corresponds toWSNmotesrsquo values The proposed hybrid architecture is shown inFigure 4
5 Results and Discussion
To evaluate the performance of a positioning system twoparameters are used accuracy and precision The accuracyof the system is expressed in terms of the positioning errorwhich is obtained from a test dataset The test data contain acollection of fingerprints associated with a location the posi-tioning algorithm processes each fingerprint and attempts to
calculate the corresponding locationThe obtained estimatedlocation is compared with the real location by calculating theEuclidean distance between the two to obtain the deviationbetween the original and the estimated values The averagepositioning error relies on the true and estimated locationto calculate a value that correctly expresses the accuracy ofthe system Usually the error between the two positions isexpressed in meters or centimeters
Figure 5 shows the location of the actual 119909-119910 coordinatesand estimated 119909-119910 coordinates of the test data as calculatedby the ANN-GDM algorithmThe test dataset was randomlyselected from the training dataset The resulting positionerror would be approximately 136m with signals fromWSNalone and 122mwith signals fromWiFi only However whencombining both signals in the hybrid setting the positionerror does not exceed 105 outperforming the cases of signalsfrom individual technologies Figure 6 shows the actual andestimated 119909-119910 coordinates of the training dataset during theoffline phase which stops training after reaching a prespeci-fied value of error
The accuracy of a learning algorithm can be improvedby spending more time in tuning its performance which is
8 Mobile Information Systems
Actual positionEstimated position
0
5
10
15
20
25
Y (m
)
5 0 minus510X (m)
(a) WiFi
Actual positionEstimated position
5 0 minus510X (m)
0
5
10
15
20
25
Y (m
)
(b) WSN
Actual positionEstimated position
4 3 2 15X (m)
15
16
17
18
19
20
21
22
23
Y (m
)
(c) Hybrid
Figure 5 Actual and estimated mean position of the testing dataset of two wireless technologies alone and with hybrid formation
HybridWSNWiFi
101 102 103 104 105 106100
Total number of iterations
0
5
10
15
20
25
30
35
Dist
ance
erro
r (m
)
Figure 6 Training positioning error versus a number of trainingiterations
achieved by allowing a large number of training iterationsin the case of ANN This tradeoff between the accuracy andcomputational time is illustrated in Figure 7
The second parameter of evaluation is defined as thesuccess probability of position calculation with respect topredefined accuracy To evaluate our system with respectto both parameters we present the Cumulative DistributionFunction (CDF) of the error (the difference between the realand calculated location coordinates) Figure 8 shows the CDFplot of the distance error for optimally trained ANN modelRunning the positioning system using the test dataset 50 ofthe time the resulting position error would be approximately14m with signals from WSN alone and 13m with signals
10 5 0 minus5 minus1015X-distance (m)
0
5
10
15
20
Y-d
istan
ce (m
)
Figure 7Actual and estimatedmeanposition of the training datasetbased on hybird
from WiFi only However when combining both signals inthe hybrid setting the position error does not exceed 12m ata probability of 50 outperforming the cases of signals fromindividual technologies
In an attempt to further improve the system accuracywe tried to use GA to optimize the ANN parameters andthereby enhance its performance However the nonopti-mized ANN-GDM performance remained the best choicein terms of accuracy precision stability and computationaltime Applying GA-based optimization in this case did not
Mobile Information Systems 9
Empirical CDF
WiFiWSNHybrid
05 1 15 2 25 30Position error (m)
0010203040506070809
1
CDF
()
Figure 8 CDF localization error of proposed hybrid system
Comparison between ANN-GDM and ANN-GA
ANN-GDMANN-GA
0
5
10
15
20
25
Dist
ance
erro
r (m
)
101 102 103 104 105 106 107100
Epoch
Figure 9 Positioning error versus number of epochs with andwithout GA optimization
incur the expected improvement despite providing a similardecrease in the training error Figure 9 shows the accuracyand computational time in both cases as a function of thenumber of allowed training epochs
The stability of a learning algorithm is one of the impor-tant factors in the neural network [21] It can be defined ashow changes to the training data influence the result of thealgorithm by running the algorithm with same parametersseveral times To evaluate our algorithm to be stable weran the network learning code with various training dataseveral times with the parameters kept constant (hiddennodes learning and momentum rates and initial weights)and the accuracy reached roughly the same value as shownin Figure 10 The value of the distance error as a functionof the number of iterations for four selected training runs isshown in Figure 10 All profiles are roughly the same for allthe performed runs
6 Performance Comparison
The performance of the hybrid indoor localization approachis summarized and compared with several similar research
Position error 1Position error 2
Position error 3Position error 4
101 102 103 104 105 106100
Number of iterations
0
5
10
15
20
25
Dist
ance
erro
r (m
)
Figure 10 Stability analysis of training algorithm
works in Table 2 The considered studies adopted the fin-gerprinting approach for localization and are based on two-dimensional data acquisition When the WiFi and WSN sig-nals are considered separately we achieved average distanceerrors of 122m (using 228 anchor points) and 135m (using96 anchor points) respectively As expected using a largernumber of anchor points a better approximation can beobtained These results show already a better accuracy withrespect to other recently published works Our proposedhybrid indoorWiFi-WSNpositioning system outperforms allprevious results providing an accuracy of 105m when using96 anchor points
7 Conclusion and Future Works
This paper presented a hybrid WiFi-WSN based indoorpositioning system based on the received signal strengthin wireless networks for the purpose of producing bet-ter localization accuracy The joint use of heterogeneoustechnologies can overcome the limitations of each technol-ogy We employed an ANN model using gradient descentwith momentum learning algorithm for location predictiontrained and tested in a heterogeneous environment We alsoconducted an extensive set of experiments in the real indoorscenario to evaluate the performance of our proposal Resultswere derived with and without GA optimization techniquein terms of accuracy precision stability and computationaltime In addition the accuracy of the proposed hybrid indoorpositioning system was compared with other well-knownhybrid systems (probabilistic and deterministic) which havebeen used for indoor localization The hybrid indoor posi-tioning system presented in this paper had the advantage ofbetter accuracy low cost and easy expansibility We believethe system can be used to locate people and assets in severalfields including those of logistics healthcare and manu-facturing Our planned future work includes the extensionof the current research into implementations of hybrid 3Dindoor environments in amultifloor scenario In addition theproposed algorithmwill be evaluated over a larger area to testthe robustness of the algorithm
10 Mobile Information Systems
Table 2 Comparison between the proposed hybrid indoor positioning system and previous hybrid indoor positioning studies
Reference Hybrid positionsystems Type of study Test area Total number of
anchor points Accuracy Implementation
[12] WSN + RFID Experimental 5 times 30m 148(approx) 16m
Fingerprinting +extended Kalmanfilter approach
[29] WiFi +bluetooth
Experimental ampsimulation 50m 24 175m Fingerprinting
approach
[30] WiFi + RFID Experimental 25 times 12m 80(approx) 16m
Fingerprinting +particle filterapproach
Our WiFidata (alone) WiFi Experimental 25 times 28 228 122
Fingerprinting +artificial neural
network
Our WSNdata (alone) WSN Experimental 10 times 28 96 136
Fingerprinting +artificial neural
networkProposedhybridindoorsystem
WiFi + WSN Experimental 10 times 28m 96 105mFingerprinting +artificial neural
network
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors acknowledge support from Grant Ref no GUP-2014-005 and Universiti Kebangsaan Malaysia
References
[1] S Joana Halder and W Kim ldquoA fusion approach of RSSI andLQI for indoor localization system using adaptive smoothersrdquoJournal of Computer Networks and Communications vol 2012Article ID 790374 10 pages 2012
[2] Z Xiong Hybrid and cooperative positioning solutions forwireless networks [PhD thesis] 2014
[3] S C Mukhopadhyay ldquoWearable sensors for human activitymonitoring a reviewrdquo IEEE Sensors Journal vol 15 no 3 pp1321ndash1330 2015
[4] G Ciuti L Ricotti A Menciassi and P Dario ldquoMEMS sensortechnologies for human centred applications in healthcarephysical activities safety and environmental sensing a reviewon research activities in Italyrdquo Sensors vol 15 no 3 pp 6441ndash6468 2015
[5] G P Zhang ldquoNeural networks for classification a surveyrdquo IEEETransactions on Systems Man and Cybernetics Part C Applica-tions and Reviews vol 30 no 4 pp 451ndash462 2000
[6] H Mehmood N K Tripathi and T Tipdecho ldquoIndoorpositioning system using artificial neural networkrdquo Journal ofComputer Science vol 6 no 10 pp 1219ndash1225 2010
[7] J McCall ldquoGenetic algorithms formodelling and optimisationrdquoJournal of Computational and AppliedMathematics vol 184 no1 pp 205ndash222 2005
[8] Y Liu and Z Yang Location Localization and LocalizabilityLocation-Awareness Technology for Wireless Networks Springer2010
[9] J Yiming ldquoIndoor location determinationrdquo in Location-BasedServices Handbook CRC Press New York NY USA 2010
[10] A De Gante and M Siller ldquoA survey of hybrid schemesfor location estimation in wireless sensor networksrdquo ProcediaTechnology vol 7 pp 377ndash383 2013
[11] D Zhang Y Yang D Cheng S Liu and LM Ni ldquoCOCKTAILan RF-based hybrid approach for indoor localizationrdquo in Pro-ceedings of the IEEE International Conference on Communica-tions (ICC rsquo10) pp 1ndash5 May 2010
[12] L-H Chen E H-K Wu M-H Jin and G-H Chen ldquoIntel-ligent fusion of Wi-Fi and inertial sensor-based positioningsystems for indoor pedestrian navigationrdquo IEEE Sensors Journalvol 14 no 11 pp 4034ndash4042 2014
[13] M A Bitew R-S Hsiao H-P Lin and D-B Lin ldquoHybridindoor human localization system for addressing the issueof RSS variation in fingerprintingrdquo International Journal ofDistributed Sensor Networks vol 2015 Article ID 831423 9pages 2015
[14] J Li B Zhang H Liu L Yu and Z Wang ldquoAn indoor hybridlocalization approach based on signal propagation model andfingerprintingrdquo International Journal of Smart Home vol 7 no6 pp 157ndash170 2013
[15] A Bahillo S Mazuelas R M Lorenzo et al ldquoHybrid RSS-RTTlocalization scheme for indoor wireless networksrdquo EURASIPJournal on Advances in Signal Processing vol 2010 Article ID126082 2010
[16] J Cheng Y Cai Q Zhang J Cheng and C Yan ldquoA new three-dimensional indoor positioning mechanism based on wirelessLANrdquoMathematical Problems in Engineering vol 2014 ArticleID 862347 7 pages 2014
[17] R C Luo and O Chen ldquoWireless and pyroelectric sensoryfusion system for indoor humanrobot localization and mon-itoringrdquo IEEEASME Transactions on Mechatronics vol 18 no3 pp 845ndash853 2013
Mobile Information Systems 11
[18] F Subhan H Hasbullah and K Ashraf ldquoKalman filter-basedhybrid indoor position estimation technique in bluetoothnetworksrdquo International Journal of Navigation and Observationvol 2013 Article ID 570964 13 pages 2013
[19] S-H Fang and T-N Lin ldquoIndoor location system based ondiscriminant-adaptive neural network in IEEE 80211 environ-mentsrdquo IEEETransactions onNeural Networks vol 19 no 11 pp1973ndash1978 2008
[20] N Qian ldquoOn the momentum term in gradient descent learningalgorithmsrdquo Neural Networks vol 12 no 1 pp 145ndash151 1999
[21] K Gopalsamy ldquoStability of artificial neural networks withimpulsesrdquo Applied Mathematics and Computation vol 154 no3 pp 783ndash813 2004
[22] H Zou X Lu H Jiang and L Xie ldquoA fast and precise indoorlocalization algorithm based on an online sequential extremelearning machinerdquo Sensors vol 15 no 1 pp 1804ndash1824 2015
[23] C Y J So J-Y Lee C-H Yoon and H Park ldquoAn improvedlocation estimation method for Wifi fingerprint-based indoorlocalizationrdquo International Journal of Software Engineering andIts Applications vol 7 no 3 pp 77ndash86 2013
[24] Z Farid R Nordin W M A W Daud and S Z HasanldquoLeveraging existing WLAN infrastructure for wireless indoorpositioning based on fingerprinting and clustering techniquerdquoin Proceedings of the 13th International Conference on Electron-ics Information and Communication (ICEIC rsquo14) pp 1ndash4 KotaKinabalu Malaysia January 2014
[25] InSSIDer by metageek httpwwwmetageeknet[26] J S Lee and Y M Wang ldquoExperimental evaluation of ZigBee-
based wireless networks in indoor environmentsrdquo Journal ofEngineering vol 2013 Article ID 286367 9 pages 2013
[27] S K Gharghan R Nordin and M Ismail ldquoEnergy-efficientZigBee-based wireless sensor network for track bicycle perfor-mancemonitoringrdquo Sensors vol 14 no 8 pp 15573ndash15592 2014
[28] XBeeXBee-pro RF Modules 2015 httpwwwdigicom[29] A Baniukevic C S Jensen andH Lu ldquoHybrid indoor position-
ingwithWi-Fi and bluetooth architecture and performancerdquo inProceedings of the IEEE 14th International Conference on MobileData Management (MDM rsquo13) pp 207ndash216 IEEE Milan ItalyJune 2013
[30] Z Xiong Z Song A Scalera et al ldquoHybrid WSN and RFIDindoor positioning and tracking system RFID and near fieldcommunications in embedded systemsrdquo EURASIP Journal onEmbedded Systems vol 2013 article 6 2013
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

4 Mobile Information Systems
Table 1 ANN designed parameters
Parameters Value RemarksNumber of inputs 6 WiFi 3 WSN 3Number of hidden layers 2 Log-Sigmoid activation functionNumber of outputs 2 Linear activation function
Number of neurons in hidden layers 15 For layer 118 For layer 2
Learning rate (119868119903) 001 Three learning rate is used for each layer
Momentum rate (120583) 06 Three momentum rate is used for each layerTarget error (goal) 0001m
The weight adjustment 119908119895119896 between the output node 119896
and the node 119895 is shown in
Δ119908119899
119895119896= 119868119903120575119896119909119896+ Δ119908(119899minus1)
119895119896120583 (5)
where 119868119903is learning rate and 120583 is momentum
313 Back-Propagation to the Hidden Layer and WeightAdjustment The error signal for hidden nodes is calculatedby adjusting the weight 119908
119894119895 between the input node 119894 and
the node 119895 which are calculated as
119908119895119894= 119908119894119895+ 119868119903120575119895119909119895+ Δ119908(119899minus1)
119895119894120583 (6)
314 Global Position Error Calculation Target data requiresnormalization before feed to ANN 119883 and 119884 coordinates arein meters with a range from minus25 to 25m 119883 and 119884 rangesabove refer to the extension of the space where the measure-ments were taken Besides this 119883 and 119884 must be normal-izing between 0 and 1 according to this linear transformation
997888rarr119883119895norm =
25lowast (04) + (05) (7)
As minus25 lt 119883119895lt 25 minus gt 01 lt 119883
119895norm lt 09
norm =
25lowast (04) + (05) (8)
As the input is the RSS signal from the four access pointsthe target training (testing) data is defined as in
Target 119905119895= 119883119895 119884119895 (9)
Output is shown in
119874119895= 119883119895 out 119884119895 out (10)
By inverting the formulas we get total positioning error asshown in (11)
Error = 25
04(119883119869 out minus 119883119895 target)
25
04(119884119869 out minus 119884119895 target) (11)
Mean ErrorPosition ⟨100381710038171003817100381710038171003817
997888997888997888997888997888997888997888997888997888997888997888Errorposition 119895100381710038171003817100381710038171003817⟩ (12)
where mean extends over all training data and⟨997888997888997888997888997888997888997888997888997888997888997888Errorposition 119895⟩ is the vector normalized The important
factor to achieving better results from ANN model is tuningits parameters However there is no definite and explicitmethod to select optimal parameters for the ANN Trialand error method is commonly used to choose appropriateANN parameters [21] Many parameters are involved intuning the ANN including the number of hidden layers thenumber of neurons in each hidden layer initial weights tostart the training the transfer function learning rate and themomentum rate The parameters of the back-propagationmethod which give the least error are given in Table 1
32 Pseudo Code for Implementing Back-Propagation inIndoor The proposed two-layer artificial neural networkwith gradient descent with momentum back-propagationpseudo code to calculate the position estimation is shown inPseudocode 1 We first compute the feed-forward computa-tion to compute all the activations and output value through-out the network Then back-propagation process startsbetween output layer and hidden layer with weight adjust-ments At last global position error calculation is done
4 Proposed Hybrid IndoorLocalization System
Numerous wireless communication techniques have beenwidely used in developing the indoor positioning systemThese techniques include the wireless local area network(WLAN) radio frequency identification (RFID) bluetoothand wireless sensor network (WSN) With the expansionof free WLAN services and popularity of smartphoneslocation-based services have drawn benefits for many appli-cations WLAN coverage can be found in common placessuch as homes shopping mall offices or campuses InadditionWLAN networks and devices have recently becomecheaper Hence there is no need to employ any additionalhardware and infrastructure for the purpose of indoor track-ing Using WiFi for indoor localization two approaches aremainly used a model-based approach and a fingerprinting-based approach [22]
The model-based method relies on the indoor path-lossmodel to estimate user location Using a path-loss modelsuch as log-distancemodel the relation between transmittingdistance and RSSI could be established and the user location
Mobile Information Systems 5
(1) initialize the ANN model(a) 119871119903= 119909 initialize the learning rate
(b) 120583 = 119910 initialize the momentum(c) for each weight 119908
119908 = rand () initialize the weight with small random number
(2) while (number of iterations ltMAX and distance error gt 120576) training loop MAX and 120576 are constant threshold valuesfor each pattern in the training set
for each layer in the ANN
for each node 119899 in the layer (a) Calculate weighted sum of inputs to 119899 (Equation (1))(b) Add the bias value to the calculated sum (Equation (2))(c) Calculate the activation function for 119899 (Equation (3))
Back propagate error through output layer (Equation (4))Back propagate error through hidden layer (Equation (5))for each weight 119908
Update 119908 (Equation (6))
Calculate distance error (Equation (11)) Equation (12) for testing data
(3) Repeat Step (2) for the testing dataset
Pseudocode 1
is computed using triangulation On the other hand locationfingerprinting utilizes the received signal strength (RSS) fromseveral Wireless Access Points (WAPs) or sensor nodes tomap the signals features measured at some location (119909 119910)
into the coordinates of that location creating a sort of signalidentifier or a fingerprint for each location and stored in adatabase called ldquoradio maprdquo A pure model-based methodwhich does not rely on a radio map shows very low accuracydue to the fading characteristics of the wireless channelWalls objects and people moving around all distort the sig-nal and the received signal strength deviates from the model[23] Our work focuses on the fingerprinting-based model
The proposed hybrid positioning system adopts finger-printmatching as the basic scheme of location determinationLocation fingerprinting utilizes the received signal strength(RSS) from several Wireless Access Points (WAPs) or sensornodes to map the signals features measured at some location(119909 119910) into the coordinates of that location creating a sortof signal identifier or a fingerprint for each location Thefingerprinting method consists of two phases [24] Phase 1is the so-called calibration phase offline phase or trainingphase in which received signal features from all WAPs orsensor nodes at selected locations in a building are recordedin a database called ldquoradio maprdquo as a function of the userrsquoslocation information (latitude longitude)
Phase 2 is the localization phase or online phase inwhich the location of an object is determined by applying apattern-matching algorithm (an ANN model in our case) tomatch the real-time (online) measurements of RSS with theclosest location that can be found in the radio map database
This method does not require specialized hardware in eitherthe mobile device or the receiving end nor is time synchro-nization necessary between the stationsThemajor drawbackof the fingerprinting approach is the laborious and time-consuming calibration process The fingerprinting workingflow diagram is shown in Figure 2
41 Experimental Setup Initial data collection and analysisare the first step for location fingerprinting implementationExperimental data of RSS samples from both IEEE 80211bg-based WAPs and ZigBee (XBee S2) sensor nodes werecollected in the basement of the Faculty of Engineering andBuilt Environment National University of Malaysia (UKM)Malaysia to represent the indoor environment Experimentalarea is surrounded by various laboratories long corridorslecture halls offices and meeting rooms The layout of theexperimental area is shown in Figure 3
The measurement set consisted of a laptop computerLenovo G580 with a core i5 processor an onboard AtherosAR9285 Wireless Adaptor for the collection of RSS sampleswith Windows 7 operating system An adjustable (height)moving table was used to carry the computer at several fixedpredetermined heights The measurement operation con-sisted of nearly uniformly distributed anchor pointswhich are1 meter apart in 119883 direction and 15 meters apart in 119884
direction For hybrid RSS data collection we marked a totalof 96 anchor points fromwhich we collect hybrid data for fin-gerprinting implementation The study area is mapped withCartesian coordinates system with the starting coordinate as(0 0)
6 Mobile Information Systems
Anchor point-1
Anchor point-2
Offline phase collection of fingerprint
Online phase localization
(x y)
(x y)
(x y)
(x y)
(x y)
(x y)
Mobile unitAnchor point-3
Anchor point-n
Artificial neural network with gradient decent with
momentum learning
Mobile user position
RSS data from WAPs
RSS data from WSN motes
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
Figure 2 ANN-based fingerprinting localization
Lab
Study seats
Lab
Lab
Lab
Lab
96 anchor points marked
WAPs
1m2m
2m
2m
2m
15m
10m
150m
28m
WSN nodes distance from ground level is 150 cm
Figure 3 Experimental area layout
42 Data Collection from WAPs Four WAPs were used tocollect the RSS data for location estimation Those WAPsformed the existingWLAN communication infrastructure of
the building near the experimental area Positions of accesspoints are not changed The use of a real communicationinfrastructure enables the identification of practical limita-tions and difficulties and ensures a fair evaluation underrealistic operating conditions Open WiFi Scanner softwareldquoinSSIDerrdquo [25] was used for collecting and analyzing RSSIvaluesThemodificationwasmade in the ldquoinSSIIDerrdquo to showthe time stamps and to save the RSS data in text format withMAC address along with signal strength values Data werecollected during a working day More than 100 RSS sampleswere collected at each anchor point (running ldquoinSSIDerrdquo soft-ware for about 2min) Signal fluctuations were suppressedby computing the average RSS from 50 samples
43 Data Collection from WSN Devices The data measure-ment and transfer from WSN devices used two types of Zig-Bee nodes (XBee series 2) [26] the sensor nodes (to transmitthe RSS data) and a coordinator node (to receive RSS data)Four sensor nodes were placed at four corners in of the exper-imental area mounted on a surface 15m above the groundA sensor node has four basic components a magnetic sensorwith a small permanent magnet an ATmega 328P microcon-troller as a Barebone a ZigBee module (XBee series 2) and apower unit (LiPo rechargeable battery 37 v1000mAh) [27]
On the other hand the coordinator which collects RSSdata from sensor nodes is attached to the laptop which is90 cm above ground in the default setting The coordinatorhas four components an Arduino Mega board based on theMega 2560 microcontroller a liquid crystal display (LCD)a ZigBee module (XBee series 2) and a power unit (LiPo
Mobile Information Systems 7
Artificial neural network(gradient decent with
WiFi indoor scenario WSN indoor scenario
Sensor components
RSS data collector
ANN outputs
Sensor node
Coordinator
12345678
12345678
momentum)
1m1m
Figure 4 Proposed hybrid indoor localization system
rechargeable battery 74 v1000mAh) The X-CTU softwarefrom DIGI International [28] was used to configure thesensor node with the microcontroller and the coordinatornode to establish a communication protocol between the twoZigBee nodes for transmitting and receiving of RSS data Inthe first scenario RSS training data is collected and stored ina database In the second scenario from the pool of trainingdata a small test portion data is randomly selected (inpercentage) and given to the ANN for testing purposes Twooutputs were obtained from the ANN one corresponds toWLANfingerprinting and the other one corresponds toWSNmotesrsquo values The proposed hybrid architecture is shown inFigure 4
5 Results and Discussion
To evaluate the performance of a positioning system twoparameters are used accuracy and precision The accuracyof the system is expressed in terms of the positioning errorwhich is obtained from a test dataset The test data contain acollection of fingerprints associated with a location the posi-tioning algorithm processes each fingerprint and attempts to
calculate the corresponding locationThe obtained estimatedlocation is compared with the real location by calculating theEuclidean distance between the two to obtain the deviationbetween the original and the estimated values The averagepositioning error relies on the true and estimated locationto calculate a value that correctly expresses the accuracy ofthe system Usually the error between the two positions isexpressed in meters or centimeters
Figure 5 shows the location of the actual 119909-119910 coordinatesand estimated 119909-119910 coordinates of the test data as calculatedby the ANN-GDM algorithmThe test dataset was randomlyselected from the training dataset The resulting positionerror would be approximately 136m with signals fromWSNalone and 122mwith signals fromWiFi only However whencombining both signals in the hybrid setting the positionerror does not exceed 105 outperforming the cases of signalsfrom individual technologies Figure 6 shows the actual andestimated 119909-119910 coordinates of the training dataset during theoffline phase which stops training after reaching a prespeci-fied value of error
The accuracy of a learning algorithm can be improvedby spending more time in tuning its performance which is
8 Mobile Information Systems
Actual positionEstimated position
0
5
10
15
20
25
Y (m
)
5 0 minus510X (m)
(a) WiFi
Actual positionEstimated position
5 0 minus510X (m)
0
5
10
15
20
25
Y (m
)
(b) WSN
Actual positionEstimated position
4 3 2 15X (m)
15
16
17
18
19
20
21
22
23
Y (m
)
(c) Hybrid
Figure 5 Actual and estimated mean position of the testing dataset of two wireless technologies alone and with hybrid formation
HybridWSNWiFi
101 102 103 104 105 106100
Total number of iterations
0
5
10
15
20
25
30
35
Dist
ance
erro
r (m
)
Figure 6 Training positioning error versus a number of trainingiterations
achieved by allowing a large number of training iterationsin the case of ANN This tradeoff between the accuracy andcomputational time is illustrated in Figure 7
The second parameter of evaluation is defined as thesuccess probability of position calculation with respect topredefined accuracy To evaluate our system with respectto both parameters we present the Cumulative DistributionFunction (CDF) of the error (the difference between the realand calculated location coordinates) Figure 8 shows the CDFplot of the distance error for optimally trained ANN modelRunning the positioning system using the test dataset 50 ofthe time the resulting position error would be approximately14m with signals from WSN alone and 13m with signals
10 5 0 minus5 minus1015X-distance (m)
0
5
10
15
20
Y-d
istan
ce (m
)
Figure 7Actual and estimatedmeanposition of the training datasetbased on hybird
from WiFi only However when combining both signals inthe hybrid setting the position error does not exceed 12m ata probability of 50 outperforming the cases of signals fromindividual technologies
In an attempt to further improve the system accuracywe tried to use GA to optimize the ANN parameters andthereby enhance its performance However the nonopti-mized ANN-GDM performance remained the best choicein terms of accuracy precision stability and computationaltime Applying GA-based optimization in this case did not
Mobile Information Systems 9
Empirical CDF
WiFiWSNHybrid
05 1 15 2 25 30Position error (m)
0010203040506070809
1
CDF
()
Figure 8 CDF localization error of proposed hybrid system
Comparison between ANN-GDM and ANN-GA
ANN-GDMANN-GA
0
5
10
15
20
25
Dist
ance
erro
r (m
)
101 102 103 104 105 106 107100
Epoch
Figure 9 Positioning error versus number of epochs with andwithout GA optimization
incur the expected improvement despite providing a similardecrease in the training error Figure 9 shows the accuracyand computational time in both cases as a function of thenumber of allowed training epochs
The stability of a learning algorithm is one of the impor-tant factors in the neural network [21] It can be defined ashow changes to the training data influence the result of thealgorithm by running the algorithm with same parametersseveral times To evaluate our algorithm to be stable weran the network learning code with various training dataseveral times with the parameters kept constant (hiddennodes learning and momentum rates and initial weights)and the accuracy reached roughly the same value as shownin Figure 10 The value of the distance error as a functionof the number of iterations for four selected training runs isshown in Figure 10 All profiles are roughly the same for allthe performed runs
6 Performance Comparison
The performance of the hybrid indoor localization approachis summarized and compared with several similar research
Position error 1Position error 2
Position error 3Position error 4
101 102 103 104 105 106100
Number of iterations
0
5
10
15
20
25
Dist
ance
erro
r (m
)
Figure 10 Stability analysis of training algorithm
works in Table 2 The considered studies adopted the fin-gerprinting approach for localization and are based on two-dimensional data acquisition When the WiFi and WSN sig-nals are considered separately we achieved average distanceerrors of 122m (using 228 anchor points) and 135m (using96 anchor points) respectively As expected using a largernumber of anchor points a better approximation can beobtained These results show already a better accuracy withrespect to other recently published works Our proposedhybrid indoorWiFi-WSNpositioning system outperforms allprevious results providing an accuracy of 105m when using96 anchor points
7 Conclusion and Future Works
This paper presented a hybrid WiFi-WSN based indoorpositioning system based on the received signal strengthin wireless networks for the purpose of producing bet-ter localization accuracy The joint use of heterogeneoustechnologies can overcome the limitations of each technol-ogy We employed an ANN model using gradient descentwith momentum learning algorithm for location predictiontrained and tested in a heterogeneous environment We alsoconducted an extensive set of experiments in the real indoorscenario to evaluate the performance of our proposal Resultswere derived with and without GA optimization techniquein terms of accuracy precision stability and computationaltime In addition the accuracy of the proposed hybrid indoorpositioning system was compared with other well-knownhybrid systems (probabilistic and deterministic) which havebeen used for indoor localization The hybrid indoor posi-tioning system presented in this paper had the advantage ofbetter accuracy low cost and easy expansibility We believethe system can be used to locate people and assets in severalfields including those of logistics healthcare and manu-facturing Our planned future work includes the extensionof the current research into implementations of hybrid 3Dindoor environments in amultifloor scenario In addition theproposed algorithmwill be evaluated over a larger area to testthe robustness of the algorithm
10 Mobile Information Systems
Table 2 Comparison between the proposed hybrid indoor positioning system and previous hybrid indoor positioning studies
Reference Hybrid positionsystems Type of study Test area Total number of
anchor points Accuracy Implementation
[12] WSN + RFID Experimental 5 times 30m 148(approx) 16m
Fingerprinting +extended Kalmanfilter approach
[29] WiFi +bluetooth
Experimental ampsimulation 50m 24 175m Fingerprinting
approach
[30] WiFi + RFID Experimental 25 times 12m 80(approx) 16m
Fingerprinting +particle filterapproach
Our WiFidata (alone) WiFi Experimental 25 times 28 228 122
Fingerprinting +artificial neural
network
Our WSNdata (alone) WSN Experimental 10 times 28 96 136
Fingerprinting +artificial neural
networkProposedhybridindoorsystem
WiFi + WSN Experimental 10 times 28m 96 105mFingerprinting +artificial neural
network
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors acknowledge support from Grant Ref no GUP-2014-005 and Universiti Kebangsaan Malaysia
References
[1] S Joana Halder and W Kim ldquoA fusion approach of RSSI andLQI for indoor localization system using adaptive smoothersrdquoJournal of Computer Networks and Communications vol 2012Article ID 790374 10 pages 2012
[2] Z Xiong Hybrid and cooperative positioning solutions forwireless networks [PhD thesis] 2014
[3] S C Mukhopadhyay ldquoWearable sensors for human activitymonitoring a reviewrdquo IEEE Sensors Journal vol 15 no 3 pp1321ndash1330 2015
[4] G Ciuti L Ricotti A Menciassi and P Dario ldquoMEMS sensortechnologies for human centred applications in healthcarephysical activities safety and environmental sensing a reviewon research activities in Italyrdquo Sensors vol 15 no 3 pp 6441ndash6468 2015
[5] G P Zhang ldquoNeural networks for classification a surveyrdquo IEEETransactions on Systems Man and Cybernetics Part C Applica-tions and Reviews vol 30 no 4 pp 451ndash462 2000
[6] H Mehmood N K Tripathi and T Tipdecho ldquoIndoorpositioning system using artificial neural networkrdquo Journal ofComputer Science vol 6 no 10 pp 1219ndash1225 2010
[7] J McCall ldquoGenetic algorithms formodelling and optimisationrdquoJournal of Computational and AppliedMathematics vol 184 no1 pp 205ndash222 2005
[8] Y Liu and Z Yang Location Localization and LocalizabilityLocation-Awareness Technology for Wireless Networks Springer2010
[9] J Yiming ldquoIndoor location determinationrdquo in Location-BasedServices Handbook CRC Press New York NY USA 2010
[10] A De Gante and M Siller ldquoA survey of hybrid schemesfor location estimation in wireless sensor networksrdquo ProcediaTechnology vol 7 pp 377ndash383 2013
[11] D Zhang Y Yang D Cheng S Liu and LM Ni ldquoCOCKTAILan RF-based hybrid approach for indoor localizationrdquo in Pro-ceedings of the IEEE International Conference on Communica-tions (ICC rsquo10) pp 1ndash5 May 2010
[12] L-H Chen E H-K Wu M-H Jin and G-H Chen ldquoIntel-ligent fusion of Wi-Fi and inertial sensor-based positioningsystems for indoor pedestrian navigationrdquo IEEE Sensors Journalvol 14 no 11 pp 4034ndash4042 2014
[13] M A Bitew R-S Hsiao H-P Lin and D-B Lin ldquoHybridindoor human localization system for addressing the issueof RSS variation in fingerprintingrdquo International Journal ofDistributed Sensor Networks vol 2015 Article ID 831423 9pages 2015
[14] J Li B Zhang H Liu L Yu and Z Wang ldquoAn indoor hybridlocalization approach based on signal propagation model andfingerprintingrdquo International Journal of Smart Home vol 7 no6 pp 157ndash170 2013
[15] A Bahillo S Mazuelas R M Lorenzo et al ldquoHybrid RSS-RTTlocalization scheme for indoor wireless networksrdquo EURASIPJournal on Advances in Signal Processing vol 2010 Article ID126082 2010
[16] J Cheng Y Cai Q Zhang J Cheng and C Yan ldquoA new three-dimensional indoor positioning mechanism based on wirelessLANrdquoMathematical Problems in Engineering vol 2014 ArticleID 862347 7 pages 2014
[17] R C Luo and O Chen ldquoWireless and pyroelectric sensoryfusion system for indoor humanrobot localization and mon-itoringrdquo IEEEASME Transactions on Mechatronics vol 18 no3 pp 845ndash853 2013
Mobile Information Systems 11
[18] F Subhan H Hasbullah and K Ashraf ldquoKalman filter-basedhybrid indoor position estimation technique in bluetoothnetworksrdquo International Journal of Navigation and Observationvol 2013 Article ID 570964 13 pages 2013
[19] S-H Fang and T-N Lin ldquoIndoor location system based ondiscriminant-adaptive neural network in IEEE 80211 environ-mentsrdquo IEEETransactions onNeural Networks vol 19 no 11 pp1973ndash1978 2008
[20] N Qian ldquoOn the momentum term in gradient descent learningalgorithmsrdquo Neural Networks vol 12 no 1 pp 145ndash151 1999
[21] K Gopalsamy ldquoStability of artificial neural networks withimpulsesrdquo Applied Mathematics and Computation vol 154 no3 pp 783ndash813 2004
[22] H Zou X Lu H Jiang and L Xie ldquoA fast and precise indoorlocalization algorithm based on an online sequential extremelearning machinerdquo Sensors vol 15 no 1 pp 1804ndash1824 2015
[23] C Y J So J-Y Lee C-H Yoon and H Park ldquoAn improvedlocation estimation method for Wifi fingerprint-based indoorlocalizationrdquo International Journal of Software Engineering andIts Applications vol 7 no 3 pp 77ndash86 2013
[24] Z Farid R Nordin W M A W Daud and S Z HasanldquoLeveraging existing WLAN infrastructure for wireless indoorpositioning based on fingerprinting and clustering techniquerdquoin Proceedings of the 13th International Conference on Electron-ics Information and Communication (ICEIC rsquo14) pp 1ndash4 KotaKinabalu Malaysia January 2014
[25] InSSIDer by metageek httpwwwmetageeknet[26] J S Lee and Y M Wang ldquoExperimental evaluation of ZigBee-
based wireless networks in indoor environmentsrdquo Journal ofEngineering vol 2013 Article ID 286367 9 pages 2013
[27] S K Gharghan R Nordin and M Ismail ldquoEnergy-efficientZigBee-based wireless sensor network for track bicycle perfor-mancemonitoringrdquo Sensors vol 14 no 8 pp 15573ndash15592 2014
[28] XBeeXBee-pro RF Modules 2015 httpwwwdigicom[29] A Baniukevic C S Jensen andH Lu ldquoHybrid indoor position-
ingwithWi-Fi and bluetooth architecture and performancerdquo inProceedings of the IEEE 14th International Conference on MobileData Management (MDM rsquo13) pp 207ndash216 IEEE Milan ItalyJune 2013
[30] Z Xiong Z Song A Scalera et al ldquoHybrid WSN and RFIDindoor positioning and tracking system RFID and near fieldcommunications in embedded systemsrdquo EURASIP Journal onEmbedded Systems vol 2013 article 6 2013
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

Mobile Information Systems 5
(1) initialize the ANN model(a) 119871119903= 119909 initialize the learning rate
(b) 120583 = 119910 initialize the momentum(c) for each weight 119908
119908 = rand () initialize the weight with small random number
(2) while (number of iterations ltMAX and distance error gt 120576) training loop MAX and 120576 are constant threshold valuesfor each pattern in the training set
for each layer in the ANN
for each node 119899 in the layer (a) Calculate weighted sum of inputs to 119899 (Equation (1))(b) Add the bias value to the calculated sum (Equation (2))(c) Calculate the activation function for 119899 (Equation (3))
Back propagate error through output layer (Equation (4))Back propagate error through hidden layer (Equation (5))for each weight 119908
Update 119908 (Equation (6))
Calculate distance error (Equation (11)) Equation (12) for testing data
(3) Repeat Step (2) for the testing dataset
Pseudocode 1
is computed using triangulation On the other hand locationfingerprinting utilizes the received signal strength (RSS) fromseveral Wireless Access Points (WAPs) or sensor nodes tomap the signals features measured at some location (119909 119910)
into the coordinates of that location creating a sort of signalidentifier or a fingerprint for each location and stored in adatabase called ldquoradio maprdquo A pure model-based methodwhich does not rely on a radio map shows very low accuracydue to the fading characteristics of the wireless channelWalls objects and people moving around all distort the sig-nal and the received signal strength deviates from the model[23] Our work focuses on the fingerprinting-based model
The proposed hybrid positioning system adopts finger-printmatching as the basic scheme of location determinationLocation fingerprinting utilizes the received signal strength(RSS) from several Wireless Access Points (WAPs) or sensornodes to map the signals features measured at some location(119909 119910) into the coordinates of that location creating a sortof signal identifier or a fingerprint for each location Thefingerprinting method consists of two phases [24] Phase 1is the so-called calibration phase offline phase or trainingphase in which received signal features from all WAPs orsensor nodes at selected locations in a building are recordedin a database called ldquoradio maprdquo as a function of the userrsquoslocation information (latitude longitude)
Phase 2 is the localization phase or online phase inwhich the location of an object is determined by applying apattern-matching algorithm (an ANN model in our case) tomatch the real-time (online) measurements of RSS with theclosest location that can be found in the radio map database
This method does not require specialized hardware in eitherthe mobile device or the receiving end nor is time synchro-nization necessary between the stationsThemajor drawbackof the fingerprinting approach is the laborious and time-consuming calibration process The fingerprinting workingflow diagram is shown in Figure 2
41 Experimental Setup Initial data collection and analysisare the first step for location fingerprinting implementationExperimental data of RSS samples from both IEEE 80211bg-based WAPs and ZigBee (XBee S2) sensor nodes werecollected in the basement of the Faculty of Engineering andBuilt Environment National University of Malaysia (UKM)Malaysia to represent the indoor environment Experimentalarea is surrounded by various laboratories long corridorslecture halls offices and meeting rooms The layout of theexperimental area is shown in Figure 3
The measurement set consisted of a laptop computerLenovo G580 with a core i5 processor an onboard AtherosAR9285 Wireless Adaptor for the collection of RSS sampleswith Windows 7 operating system An adjustable (height)moving table was used to carry the computer at several fixedpredetermined heights The measurement operation con-sisted of nearly uniformly distributed anchor pointswhich are1 meter apart in 119883 direction and 15 meters apart in 119884
direction For hybrid RSS data collection we marked a totalof 96 anchor points fromwhich we collect hybrid data for fin-gerprinting implementation The study area is mapped withCartesian coordinates system with the starting coordinate as(0 0)
6 Mobile Information Systems
Anchor point-1
Anchor point-2
Offline phase collection of fingerprint
Online phase localization
(x y)
(x y)
(x y)
(x y)
(x y)
(x y)
Mobile unitAnchor point-3
Anchor point-n
Artificial neural network with gradient decent with
momentum learning
Mobile user position
RSS data from WAPs
RSS data from WSN motes
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
Figure 2 ANN-based fingerprinting localization
Lab
Study seats
Lab
Lab
Lab
Lab
96 anchor points marked
WAPs
1m2m
2m
2m
2m
15m
10m
150m
28m
WSN nodes distance from ground level is 150 cm
Figure 3 Experimental area layout
42 Data Collection from WAPs Four WAPs were used tocollect the RSS data for location estimation Those WAPsformed the existingWLAN communication infrastructure of
the building near the experimental area Positions of accesspoints are not changed The use of a real communicationinfrastructure enables the identification of practical limita-tions and difficulties and ensures a fair evaluation underrealistic operating conditions Open WiFi Scanner softwareldquoinSSIDerrdquo [25] was used for collecting and analyzing RSSIvaluesThemodificationwasmade in the ldquoinSSIIDerrdquo to showthe time stamps and to save the RSS data in text format withMAC address along with signal strength values Data werecollected during a working day More than 100 RSS sampleswere collected at each anchor point (running ldquoinSSIDerrdquo soft-ware for about 2min) Signal fluctuations were suppressedby computing the average RSS from 50 samples
43 Data Collection from WSN Devices The data measure-ment and transfer from WSN devices used two types of Zig-Bee nodes (XBee series 2) [26] the sensor nodes (to transmitthe RSS data) and a coordinator node (to receive RSS data)Four sensor nodes were placed at four corners in of the exper-imental area mounted on a surface 15m above the groundA sensor node has four basic components a magnetic sensorwith a small permanent magnet an ATmega 328P microcon-troller as a Barebone a ZigBee module (XBee series 2) and apower unit (LiPo rechargeable battery 37 v1000mAh) [27]
On the other hand the coordinator which collects RSSdata from sensor nodes is attached to the laptop which is90 cm above ground in the default setting The coordinatorhas four components an Arduino Mega board based on theMega 2560 microcontroller a liquid crystal display (LCD)a ZigBee module (XBee series 2) and a power unit (LiPo
Mobile Information Systems 7
Artificial neural network(gradient decent with
WiFi indoor scenario WSN indoor scenario
Sensor components
RSS data collector
ANN outputs
Sensor node
Coordinator
12345678
12345678
momentum)
1m1m
Figure 4 Proposed hybrid indoor localization system
rechargeable battery 74 v1000mAh) The X-CTU softwarefrom DIGI International [28] was used to configure thesensor node with the microcontroller and the coordinatornode to establish a communication protocol between the twoZigBee nodes for transmitting and receiving of RSS data Inthe first scenario RSS training data is collected and stored ina database In the second scenario from the pool of trainingdata a small test portion data is randomly selected (inpercentage) and given to the ANN for testing purposes Twooutputs were obtained from the ANN one corresponds toWLANfingerprinting and the other one corresponds toWSNmotesrsquo values The proposed hybrid architecture is shown inFigure 4
5 Results and Discussion
To evaluate the performance of a positioning system twoparameters are used accuracy and precision The accuracyof the system is expressed in terms of the positioning errorwhich is obtained from a test dataset The test data contain acollection of fingerprints associated with a location the posi-tioning algorithm processes each fingerprint and attempts to
calculate the corresponding locationThe obtained estimatedlocation is compared with the real location by calculating theEuclidean distance between the two to obtain the deviationbetween the original and the estimated values The averagepositioning error relies on the true and estimated locationto calculate a value that correctly expresses the accuracy ofthe system Usually the error between the two positions isexpressed in meters or centimeters
Figure 5 shows the location of the actual 119909-119910 coordinatesand estimated 119909-119910 coordinates of the test data as calculatedby the ANN-GDM algorithmThe test dataset was randomlyselected from the training dataset The resulting positionerror would be approximately 136m with signals fromWSNalone and 122mwith signals fromWiFi only However whencombining both signals in the hybrid setting the positionerror does not exceed 105 outperforming the cases of signalsfrom individual technologies Figure 6 shows the actual andestimated 119909-119910 coordinates of the training dataset during theoffline phase which stops training after reaching a prespeci-fied value of error
The accuracy of a learning algorithm can be improvedby spending more time in tuning its performance which is
8 Mobile Information Systems
Actual positionEstimated position
0
5
10
15
20
25
Y (m
)
5 0 minus510X (m)
(a) WiFi
Actual positionEstimated position
5 0 minus510X (m)
0
5
10
15
20
25
Y (m
)
(b) WSN
Actual positionEstimated position
4 3 2 15X (m)
15
16
17
18
19
20
21
22
23
Y (m
)
(c) Hybrid
Figure 5 Actual and estimated mean position of the testing dataset of two wireless technologies alone and with hybrid formation
HybridWSNWiFi
101 102 103 104 105 106100
Total number of iterations
0
5
10
15
20
25
30
35
Dist
ance
erro
r (m
)
Figure 6 Training positioning error versus a number of trainingiterations
achieved by allowing a large number of training iterationsin the case of ANN This tradeoff between the accuracy andcomputational time is illustrated in Figure 7
The second parameter of evaluation is defined as thesuccess probability of position calculation with respect topredefined accuracy To evaluate our system with respectto both parameters we present the Cumulative DistributionFunction (CDF) of the error (the difference between the realand calculated location coordinates) Figure 8 shows the CDFplot of the distance error for optimally trained ANN modelRunning the positioning system using the test dataset 50 ofthe time the resulting position error would be approximately14m with signals from WSN alone and 13m with signals
10 5 0 minus5 minus1015X-distance (m)
0
5
10
15
20
Y-d
istan
ce (m
)
Figure 7Actual and estimatedmeanposition of the training datasetbased on hybird
from WiFi only However when combining both signals inthe hybrid setting the position error does not exceed 12m ata probability of 50 outperforming the cases of signals fromindividual technologies
In an attempt to further improve the system accuracywe tried to use GA to optimize the ANN parameters andthereby enhance its performance However the nonopti-mized ANN-GDM performance remained the best choicein terms of accuracy precision stability and computationaltime Applying GA-based optimization in this case did not
Mobile Information Systems 9
Empirical CDF
WiFiWSNHybrid
05 1 15 2 25 30Position error (m)
0010203040506070809
1
CDF
()
Figure 8 CDF localization error of proposed hybrid system
Comparison between ANN-GDM and ANN-GA
ANN-GDMANN-GA
0
5
10
15
20
25
Dist
ance
erro
r (m
)
101 102 103 104 105 106 107100
Epoch
Figure 9 Positioning error versus number of epochs with andwithout GA optimization
incur the expected improvement despite providing a similardecrease in the training error Figure 9 shows the accuracyand computational time in both cases as a function of thenumber of allowed training epochs
The stability of a learning algorithm is one of the impor-tant factors in the neural network [21] It can be defined ashow changes to the training data influence the result of thealgorithm by running the algorithm with same parametersseveral times To evaluate our algorithm to be stable weran the network learning code with various training dataseveral times with the parameters kept constant (hiddennodes learning and momentum rates and initial weights)and the accuracy reached roughly the same value as shownin Figure 10 The value of the distance error as a functionof the number of iterations for four selected training runs isshown in Figure 10 All profiles are roughly the same for allthe performed runs
6 Performance Comparison
The performance of the hybrid indoor localization approachis summarized and compared with several similar research
Position error 1Position error 2
Position error 3Position error 4
101 102 103 104 105 106100
Number of iterations
0
5
10
15
20
25
Dist
ance
erro
r (m
)
Figure 10 Stability analysis of training algorithm
works in Table 2 The considered studies adopted the fin-gerprinting approach for localization and are based on two-dimensional data acquisition When the WiFi and WSN sig-nals are considered separately we achieved average distanceerrors of 122m (using 228 anchor points) and 135m (using96 anchor points) respectively As expected using a largernumber of anchor points a better approximation can beobtained These results show already a better accuracy withrespect to other recently published works Our proposedhybrid indoorWiFi-WSNpositioning system outperforms allprevious results providing an accuracy of 105m when using96 anchor points
7 Conclusion and Future Works
This paper presented a hybrid WiFi-WSN based indoorpositioning system based on the received signal strengthin wireless networks for the purpose of producing bet-ter localization accuracy The joint use of heterogeneoustechnologies can overcome the limitations of each technol-ogy We employed an ANN model using gradient descentwith momentum learning algorithm for location predictiontrained and tested in a heterogeneous environment We alsoconducted an extensive set of experiments in the real indoorscenario to evaluate the performance of our proposal Resultswere derived with and without GA optimization techniquein terms of accuracy precision stability and computationaltime In addition the accuracy of the proposed hybrid indoorpositioning system was compared with other well-knownhybrid systems (probabilistic and deterministic) which havebeen used for indoor localization The hybrid indoor posi-tioning system presented in this paper had the advantage ofbetter accuracy low cost and easy expansibility We believethe system can be used to locate people and assets in severalfields including those of logistics healthcare and manu-facturing Our planned future work includes the extensionof the current research into implementations of hybrid 3Dindoor environments in amultifloor scenario In addition theproposed algorithmwill be evaluated over a larger area to testthe robustness of the algorithm
10 Mobile Information Systems
Table 2 Comparison between the proposed hybrid indoor positioning system and previous hybrid indoor positioning studies
Reference Hybrid positionsystems Type of study Test area Total number of
anchor points Accuracy Implementation
[12] WSN + RFID Experimental 5 times 30m 148(approx) 16m
Fingerprinting +extended Kalmanfilter approach
[29] WiFi +bluetooth
Experimental ampsimulation 50m 24 175m Fingerprinting
approach
[30] WiFi + RFID Experimental 25 times 12m 80(approx) 16m
Fingerprinting +particle filterapproach
Our WiFidata (alone) WiFi Experimental 25 times 28 228 122
Fingerprinting +artificial neural
network
Our WSNdata (alone) WSN Experimental 10 times 28 96 136
Fingerprinting +artificial neural
networkProposedhybridindoorsystem
WiFi + WSN Experimental 10 times 28m 96 105mFingerprinting +artificial neural
network
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors acknowledge support from Grant Ref no GUP-2014-005 and Universiti Kebangsaan Malaysia
References
[1] S Joana Halder and W Kim ldquoA fusion approach of RSSI andLQI for indoor localization system using adaptive smoothersrdquoJournal of Computer Networks and Communications vol 2012Article ID 790374 10 pages 2012
[2] Z Xiong Hybrid and cooperative positioning solutions forwireless networks [PhD thesis] 2014
[3] S C Mukhopadhyay ldquoWearable sensors for human activitymonitoring a reviewrdquo IEEE Sensors Journal vol 15 no 3 pp1321ndash1330 2015
[4] G Ciuti L Ricotti A Menciassi and P Dario ldquoMEMS sensortechnologies for human centred applications in healthcarephysical activities safety and environmental sensing a reviewon research activities in Italyrdquo Sensors vol 15 no 3 pp 6441ndash6468 2015
[5] G P Zhang ldquoNeural networks for classification a surveyrdquo IEEETransactions on Systems Man and Cybernetics Part C Applica-tions and Reviews vol 30 no 4 pp 451ndash462 2000
[6] H Mehmood N K Tripathi and T Tipdecho ldquoIndoorpositioning system using artificial neural networkrdquo Journal ofComputer Science vol 6 no 10 pp 1219ndash1225 2010
[7] J McCall ldquoGenetic algorithms formodelling and optimisationrdquoJournal of Computational and AppliedMathematics vol 184 no1 pp 205ndash222 2005
[8] Y Liu and Z Yang Location Localization and LocalizabilityLocation-Awareness Technology for Wireless Networks Springer2010
[9] J Yiming ldquoIndoor location determinationrdquo in Location-BasedServices Handbook CRC Press New York NY USA 2010
[10] A De Gante and M Siller ldquoA survey of hybrid schemesfor location estimation in wireless sensor networksrdquo ProcediaTechnology vol 7 pp 377ndash383 2013
[11] D Zhang Y Yang D Cheng S Liu and LM Ni ldquoCOCKTAILan RF-based hybrid approach for indoor localizationrdquo in Pro-ceedings of the IEEE International Conference on Communica-tions (ICC rsquo10) pp 1ndash5 May 2010
[12] L-H Chen E H-K Wu M-H Jin and G-H Chen ldquoIntel-ligent fusion of Wi-Fi and inertial sensor-based positioningsystems for indoor pedestrian navigationrdquo IEEE Sensors Journalvol 14 no 11 pp 4034ndash4042 2014
[13] M A Bitew R-S Hsiao H-P Lin and D-B Lin ldquoHybridindoor human localization system for addressing the issueof RSS variation in fingerprintingrdquo International Journal ofDistributed Sensor Networks vol 2015 Article ID 831423 9pages 2015
[14] J Li B Zhang H Liu L Yu and Z Wang ldquoAn indoor hybridlocalization approach based on signal propagation model andfingerprintingrdquo International Journal of Smart Home vol 7 no6 pp 157ndash170 2013
[15] A Bahillo S Mazuelas R M Lorenzo et al ldquoHybrid RSS-RTTlocalization scheme for indoor wireless networksrdquo EURASIPJournal on Advances in Signal Processing vol 2010 Article ID126082 2010
[16] J Cheng Y Cai Q Zhang J Cheng and C Yan ldquoA new three-dimensional indoor positioning mechanism based on wirelessLANrdquoMathematical Problems in Engineering vol 2014 ArticleID 862347 7 pages 2014
[17] R C Luo and O Chen ldquoWireless and pyroelectric sensoryfusion system for indoor humanrobot localization and mon-itoringrdquo IEEEASME Transactions on Mechatronics vol 18 no3 pp 845ndash853 2013
Mobile Information Systems 11
[18] F Subhan H Hasbullah and K Ashraf ldquoKalman filter-basedhybrid indoor position estimation technique in bluetoothnetworksrdquo International Journal of Navigation and Observationvol 2013 Article ID 570964 13 pages 2013
[19] S-H Fang and T-N Lin ldquoIndoor location system based ondiscriminant-adaptive neural network in IEEE 80211 environ-mentsrdquo IEEETransactions onNeural Networks vol 19 no 11 pp1973ndash1978 2008
[20] N Qian ldquoOn the momentum term in gradient descent learningalgorithmsrdquo Neural Networks vol 12 no 1 pp 145ndash151 1999
[21] K Gopalsamy ldquoStability of artificial neural networks withimpulsesrdquo Applied Mathematics and Computation vol 154 no3 pp 783ndash813 2004
[22] H Zou X Lu H Jiang and L Xie ldquoA fast and precise indoorlocalization algorithm based on an online sequential extremelearning machinerdquo Sensors vol 15 no 1 pp 1804ndash1824 2015
[23] C Y J So J-Y Lee C-H Yoon and H Park ldquoAn improvedlocation estimation method for Wifi fingerprint-based indoorlocalizationrdquo International Journal of Software Engineering andIts Applications vol 7 no 3 pp 77ndash86 2013
[24] Z Farid R Nordin W M A W Daud and S Z HasanldquoLeveraging existing WLAN infrastructure for wireless indoorpositioning based on fingerprinting and clustering techniquerdquoin Proceedings of the 13th International Conference on Electron-ics Information and Communication (ICEIC rsquo14) pp 1ndash4 KotaKinabalu Malaysia January 2014
[25] InSSIDer by metageek httpwwwmetageeknet[26] J S Lee and Y M Wang ldquoExperimental evaluation of ZigBee-
based wireless networks in indoor environmentsrdquo Journal ofEngineering vol 2013 Article ID 286367 9 pages 2013
[27] S K Gharghan R Nordin and M Ismail ldquoEnergy-efficientZigBee-based wireless sensor network for track bicycle perfor-mancemonitoringrdquo Sensors vol 14 no 8 pp 15573ndash15592 2014
[28] XBeeXBee-pro RF Modules 2015 httpwwwdigicom[29] A Baniukevic C S Jensen andH Lu ldquoHybrid indoor position-
ingwithWi-Fi and bluetooth architecture and performancerdquo inProceedings of the IEEE 14th International Conference on MobileData Management (MDM rsquo13) pp 207ndash216 IEEE Milan ItalyJune 2013
[30] Z Xiong Z Song A Scalera et al ldquoHybrid WSN and RFIDindoor positioning and tracking system RFID and near fieldcommunications in embedded systemsrdquo EURASIP Journal onEmbedded Systems vol 2013 article 6 2013
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
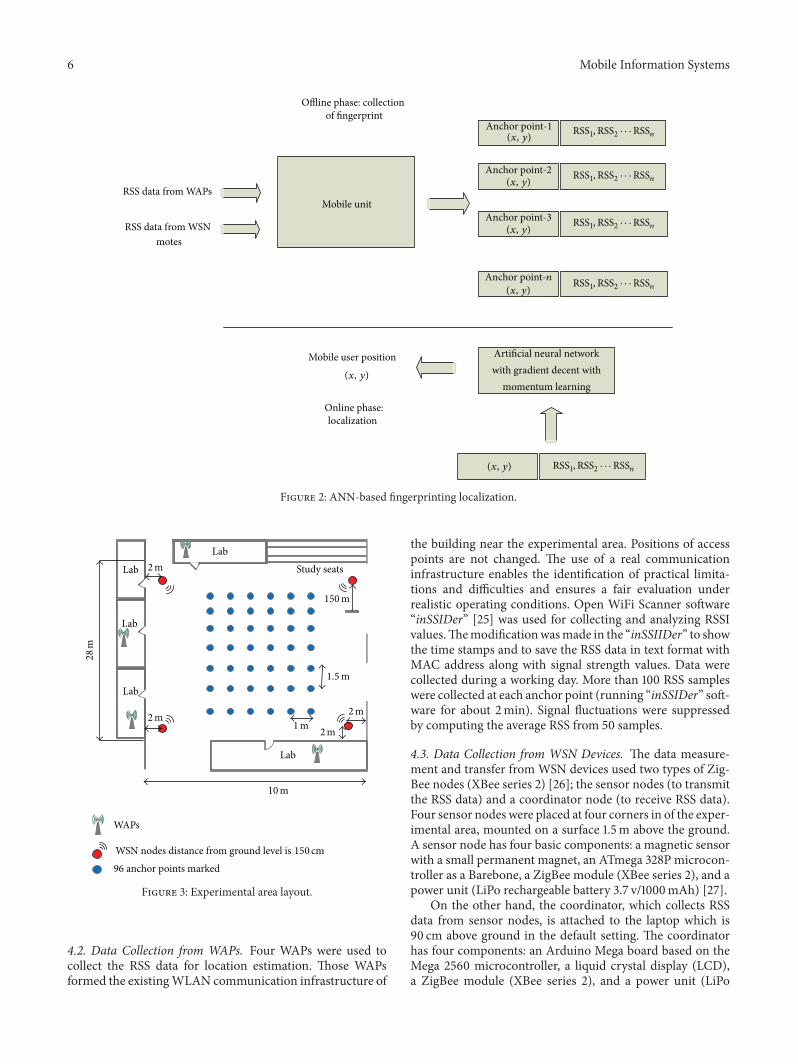
6 Mobile Information Systems
Anchor point-1
Anchor point-2
Offline phase collection of fingerprint
Online phase localization
(x y)
(x y)
(x y)
(x y)
(x y)
(x y)
Mobile unitAnchor point-3
Anchor point-n
Artificial neural network with gradient decent with
momentum learning
Mobile user position
RSS data from WAPs
RSS data from WSN motes
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
RSS1RSS2 middot middot middotRSSn
Figure 2 ANN-based fingerprinting localization
Lab
Study seats
Lab
Lab
Lab
Lab
96 anchor points marked
WAPs
1m2m
2m
2m
2m
15m
10m
150m
28m
WSN nodes distance from ground level is 150 cm
Figure 3 Experimental area layout
42 Data Collection from WAPs Four WAPs were used tocollect the RSS data for location estimation Those WAPsformed the existingWLAN communication infrastructure of
the building near the experimental area Positions of accesspoints are not changed The use of a real communicationinfrastructure enables the identification of practical limita-tions and difficulties and ensures a fair evaluation underrealistic operating conditions Open WiFi Scanner softwareldquoinSSIDerrdquo [25] was used for collecting and analyzing RSSIvaluesThemodificationwasmade in the ldquoinSSIIDerrdquo to showthe time stamps and to save the RSS data in text format withMAC address along with signal strength values Data werecollected during a working day More than 100 RSS sampleswere collected at each anchor point (running ldquoinSSIDerrdquo soft-ware for about 2min) Signal fluctuations were suppressedby computing the average RSS from 50 samples
43 Data Collection from WSN Devices The data measure-ment and transfer from WSN devices used two types of Zig-Bee nodes (XBee series 2) [26] the sensor nodes (to transmitthe RSS data) and a coordinator node (to receive RSS data)Four sensor nodes were placed at four corners in of the exper-imental area mounted on a surface 15m above the groundA sensor node has four basic components a magnetic sensorwith a small permanent magnet an ATmega 328P microcon-troller as a Barebone a ZigBee module (XBee series 2) and apower unit (LiPo rechargeable battery 37 v1000mAh) [27]
On the other hand the coordinator which collects RSSdata from sensor nodes is attached to the laptop which is90 cm above ground in the default setting The coordinatorhas four components an Arduino Mega board based on theMega 2560 microcontroller a liquid crystal display (LCD)a ZigBee module (XBee series 2) and a power unit (LiPo
Mobile Information Systems 7
Artificial neural network(gradient decent with
WiFi indoor scenario WSN indoor scenario
Sensor components
RSS data collector
ANN outputs
Sensor node
Coordinator
12345678
12345678
momentum)
1m1m
Figure 4 Proposed hybrid indoor localization system
rechargeable battery 74 v1000mAh) The X-CTU softwarefrom DIGI International [28] was used to configure thesensor node with the microcontroller and the coordinatornode to establish a communication protocol between the twoZigBee nodes for transmitting and receiving of RSS data Inthe first scenario RSS training data is collected and stored ina database In the second scenario from the pool of trainingdata a small test portion data is randomly selected (inpercentage) and given to the ANN for testing purposes Twooutputs were obtained from the ANN one corresponds toWLANfingerprinting and the other one corresponds toWSNmotesrsquo values The proposed hybrid architecture is shown inFigure 4
5 Results and Discussion
To evaluate the performance of a positioning system twoparameters are used accuracy and precision The accuracyof the system is expressed in terms of the positioning errorwhich is obtained from a test dataset The test data contain acollection of fingerprints associated with a location the posi-tioning algorithm processes each fingerprint and attempts to
calculate the corresponding locationThe obtained estimatedlocation is compared with the real location by calculating theEuclidean distance between the two to obtain the deviationbetween the original and the estimated values The averagepositioning error relies on the true and estimated locationto calculate a value that correctly expresses the accuracy ofthe system Usually the error between the two positions isexpressed in meters or centimeters
Figure 5 shows the location of the actual 119909-119910 coordinatesand estimated 119909-119910 coordinates of the test data as calculatedby the ANN-GDM algorithmThe test dataset was randomlyselected from the training dataset The resulting positionerror would be approximately 136m with signals fromWSNalone and 122mwith signals fromWiFi only However whencombining both signals in the hybrid setting the positionerror does not exceed 105 outperforming the cases of signalsfrom individual technologies Figure 6 shows the actual andestimated 119909-119910 coordinates of the training dataset during theoffline phase which stops training after reaching a prespeci-fied value of error
The accuracy of a learning algorithm can be improvedby spending more time in tuning its performance which is
8 Mobile Information Systems
Actual positionEstimated position
0
5
10
15
20
25
Y (m
)
5 0 minus510X (m)
(a) WiFi
Actual positionEstimated position
5 0 minus510X (m)
0
5
10
15
20
25
Y (m
)
(b) WSN
Actual positionEstimated position
4 3 2 15X (m)
15
16
17
18
19
20
21
22
23
Y (m
)
(c) Hybrid
Figure 5 Actual and estimated mean position of the testing dataset of two wireless technologies alone and with hybrid formation
HybridWSNWiFi
101 102 103 104 105 106100
Total number of iterations
0
5
10
15
20
25
30
35
Dist
ance
erro
r (m
)
Figure 6 Training positioning error versus a number of trainingiterations
achieved by allowing a large number of training iterationsin the case of ANN This tradeoff between the accuracy andcomputational time is illustrated in Figure 7
The second parameter of evaluation is defined as thesuccess probability of position calculation with respect topredefined accuracy To evaluate our system with respectto both parameters we present the Cumulative DistributionFunction (CDF) of the error (the difference between the realand calculated location coordinates) Figure 8 shows the CDFplot of the distance error for optimally trained ANN modelRunning the positioning system using the test dataset 50 ofthe time the resulting position error would be approximately14m with signals from WSN alone and 13m with signals
10 5 0 minus5 minus1015X-distance (m)
0
5
10
15
20
Y-d
istan
ce (m
)
Figure 7Actual and estimatedmeanposition of the training datasetbased on hybird
from WiFi only However when combining both signals inthe hybrid setting the position error does not exceed 12m ata probability of 50 outperforming the cases of signals fromindividual technologies
In an attempt to further improve the system accuracywe tried to use GA to optimize the ANN parameters andthereby enhance its performance However the nonopti-mized ANN-GDM performance remained the best choicein terms of accuracy precision stability and computationaltime Applying GA-based optimization in this case did not
Mobile Information Systems 9
Empirical CDF
WiFiWSNHybrid
05 1 15 2 25 30Position error (m)
0010203040506070809
1
CDF
()
Figure 8 CDF localization error of proposed hybrid system
Comparison between ANN-GDM and ANN-GA
ANN-GDMANN-GA
0
5
10
15
20
25
Dist
ance
erro
r (m
)
101 102 103 104 105 106 107100
Epoch
Figure 9 Positioning error versus number of epochs with andwithout GA optimization
incur the expected improvement despite providing a similardecrease in the training error Figure 9 shows the accuracyand computational time in both cases as a function of thenumber of allowed training epochs
The stability of a learning algorithm is one of the impor-tant factors in the neural network [21] It can be defined ashow changes to the training data influence the result of thealgorithm by running the algorithm with same parametersseveral times To evaluate our algorithm to be stable weran the network learning code with various training dataseveral times with the parameters kept constant (hiddennodes learning and momentum rates and initial weights)and the accuracy reached roughly the same value as shownin Figure 10 The value of the distance error as a functionof the number of iterations for four selected training runs isshown in Figure 10 All profiles are roughly the same for allthe performed runs
6 Performance Comparison
The performance of the hybrid indoor localization approachis summarized and compared with several similar research
Position error 1Position error 2
Position error 3Position error 4
101 102 103 104 105 106100
Number of iterations
0
5
10
15
20
25
Dist
ance
erro
r (m
)
Figure 10 Stability analysis of training algorithm
works in Table 2 The considered studies adopted the fin-gerprinting approach for localization and are based on two-dimensional data acquisition When the WiFi and WSN sig-nals are considered separately we achieved average distanceerrors of 122m (using 228 anchor points) and 135m (using96 anchor points) respectively As expected using a largernumber of anchor points a better approximation can beobtained These results show already a better accuracy withrespect to other recently published works Our proposedhybrid indoorWiFi-WSNpositioning system outperforms allprevious results providing an accuracy of 105m when using96 anchor points
7 Conclusion and Future Works
This paper presented a hybrid WiFi-WSN based indoorpositioning system based on the received signal strengthin wireless networks for the purpose of producing bet-ter localization accuracy The joint use of heterogeneoustechnologies can overcome the limitations of each technol-ogy We employed an ANN model using gradient descentwith momentum learning algorithm for location predictiontrained and tested in a heterogeneous environment We alsoconducted an extensive set of experiments in the real indoorscenario to evaluate the performance of our proposal Resultswere derived with and without GA optimization techniquein terms of accuracy precision stability and computationaltime In addition the accuracy of the proposed hybrid indoorpositioning system was compared with other well-knownhybrid systems (probabilistic and deterministic) which havebeen used for indoor localization The hybrid indoor posi-tioning system presented in this paper had the advantage ofbetter accuracy low cost and easy expansibility We believethe system can be used to locate people and assets in severalfields including those of logistics healthcare and manu-facturing Our planned future work includes the extensionof the current research into implementations of hybrid 3Dindoor environments in amultifloor scenario In addition theproposed algorithmwill be evaluated over a larger area to testthe robustness of the algorithm
10 Mobile Information Systems
Table 2 Comparison between the proposed hybrid indoor positioning system and previous hybrid indoor positioning studies
Reference Hybrid positionsystems Type of study Test area Total number of
anchor points Accuracy Implementation
[12] WSN + RFID Experimental 5 times 30m 148(approx) 16m
Fingerprinting +extended Kalmanfilter approach
[29] WiFi +bluetooth
Experimental ampsimulation 50m 24 175m Fingerprinting
approach
[30] WiFi + RFID Experimental 25 times 12m 80(approx) 16m
Fingerprinting +particle filterapproach
Our WiFidata (alone) WiFi Experimental 25 times 28 228 122
Fingerprinting +artificial neural
network
Our WSNdata (alone) WSN Experimental 10 times 28 96 136
Fingerprinting +artificial neural
networkProposedhybridindoorsystem
WiFi + WSN Experimental 10 times 28m 96 105mFingerprinting +artificial neural
network
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors acknowledge support from Grant Ref no GUP-2014-005 and Universiti Kebangsaan Malaysia
References
[1] S Joana Halder and W Kim ldquoA fusion approach of RSSI andLQI for indoor localization system using adaptive smoothersrdquoJournal of Computer Networks and Communications vol 2012Article ID 790374 10 pages 2012
[2] Z Xiong Hybrid and cooperative positioning solutions forwireless networks [PhD thesis] 2014
[3] S C Mukhopadhyay ldquoWearable sensors for human activitymonitoring a reviewrdquo IEEE Sensors Journal vol 15 no 3 pp1321ndash1330 2015
[4] G Ciuti L Ricotti A Menciassi and P Dario ldquoMEMS sensortechnologies for human centred applications in healthcarephysical activities safety and environmental sensing a reviewon research activities in Italyrdquo Sensors vol 15 no 3 pp 6441ndash6468 2015
[5] G P Zhang ldquoNeural networks for classification a surveyrdquo IEEETransactions on Systems Man and Cybernetics Part C Applica-tions and Reviews vol 30 no 4 pp 451ndash462 2000
[6] H Mehmood N K Tripathi and T Tipdecho ldquoIndoorpositioning system using artificial neural networkrdquo Journal ofComputer Science vol 6 no 10 pp 1219ndash1225 2010
[7] J McCall ldquoGenetic algorithms formodelling and optimisationrdquoJournal of Computational and AppliedMathematics vol 184 no1 pp 205ndash222 2005
[8] Y Liu and Z Yang Location Localization and LocalizabilityLocation-Awareness Technology for Wireless Networks Springer2010
[9] J Yiming ldquoIndoor location determinationrdquo in Location-BasedServices Handbook CRC Press New York NY USA 2010
[10] A De Gante and M Siller ldquoA survey of hybrid schemesfor location estimation in wireless sensor networksrdquo ProcediaTechnology vol 7 pp 377ndash383 2013
[11] D Zhang Y Yang D Cheng S Liu and LM Ni ldquoCOCKTAILan RF-based hybrid approach for indoor localizationrdquo in Pro-ceedings of the IEEE International Conference on Communica-tions (ICC rsquo10) pp 1ndash5 May 2010
[12] L-H Chen E H-K Wu M-H Jin and G-H Chen ldquoIntel-ligent fusion of Wi-Fi and inertial sensor-based positioningsystems for indoor pedestrian navigationrdquo IEEE Sensors Journalvol 14 no 11 pp 4034ndash4042 2014
[13] M A Bitew R-S Hsiao H-P Lin and D-B Lin ldquoHybridindoor human localization system for addressing the issueof RSS variation in fingerprintingrdquo International Journal ofDistributed Sensor Networks vol 2015 Article ID 831423 9pages 2015
[14] J Li B Zhang H Liu L Yu and Z Wang ldquoAn indoor hybridlocalization approach based on signal propagation model andfingerprintingrdquo International Journal of Smart Home vol 7 no6 pp 157ndash170 2013
[15] A Bahillo S Mazuelas R M Lorenzo et al ldquoHybrid RSS-RTTlocalization scheme for indoor wireless networksrdquo EURASIPJournal on Advances in Signal Processing vol 2010 Article ID126082 2010
[16] J Cheng Y Cai Q Zhang J Cheng and C Yan ldquoA new three-dimensional indoor positioning mechanism based on wirelessLANrdquoMathematical Problems in Engineering vol 2014 ArticleID 862347 7 pages 2014
[17] R C Luo and O Chen ldquoWireless and pyroelectric sensoryfusion system for indoor humanrobot localization and mon-itoringrdquo IEEEASME Transactions on Mechatronics vol 18 no3 pp 845ndash853 2013
Mobile Information Systems 11
[18] F Subhan H Hasbullah and K Ashraf ldquoKalman filter-basedhybrid indoor position estimation technique in bluetoothnetworksrdquo International Journal of Navigation and Observationvol 2013 Article ID 570964 13 pages 2013
[19] S-H Fang and T-N Lin ldquoIndoor location system based ondiscriminant-adaptive neural network in IEEE 80211 environ-mentsrdquo IEEETransactions onNeural Networks vol 19 no 11 pp1973ndash1978 2008
[20] N Qian ldquoOn the momentum term in gradient descent learningalgorithmsrdquo Neural Networks vol 12 no 1 pp 145ndash151 1999
[21] K Gopalsamy ldquoStability of artificial neural networks withimpulsesrdquo Applied Mathematics and Computation vol 154 no3 pp 783ndash813 2004
[22] H Zou X Lu H Jiang and L Xie ldquoA fast and precise indoorlocalization algorithm based on an online sequential extremelearning machinerdquo Sensors vol 15 no 1 pp 1804ndash1824 2015
[23] C Y J So J-Y Lee C-H Yoon and H Park ldquoAn improvedlocation estimation method for Wifi fingerprint-based indoorlocalizationrdquo International Journal of Software Engineering andIts Applications vol 7 no 3 pp 77ndash86 2013
[24] Z Farid R Nordin W M A W Daud and S Z HasanldquoLeveraging existing WLAN infrastructure for wireless indoorpositioning based on fingerprinting and clustering techniquerdquoin Proceedings of the 13th International Conference on Electron-ics Information and Communication (ICEIC rsquo14) pp 1ndash4 KotaKinabalu Malaysia January 2014
[25] InSSIDer by metageek httpwwwmetageeknet[26] J S Lee and Y M Wang ldquoExperimental evaluation of ZigBee-
based wireless networks in indoor environmentsrdquo Journal ofEngineering vol 2013 Article ID 286367 9 pages 2013
[27] S K Gharghan R Nordin and M Ismail ldquoEnergy-efficientZigBee-based wireless sensor network for track bicycle perfor-mancemonitoringrdquo Sensors vol 14 no 8 pp 15573ndash15592 2014
[28] XBeeXBee-pro RF Modules 2015 httpwwwdigicom[29] A Baniukevic C S Jensen andH Lu ldquoHybrid indoor position-
ingwithWi-Fi and bluetooth architecture and performancerdquo inProceedings of the IEEE 14th International Conference on MobileData Management (MDM rsquo13) pp 207ndash216 IEEE Milan ItalyJune 2013
[30] Z Xiong Z Song A Scalera et al ldquoHybrid WSN and RFIDindoor positioning and tracking system RFID and near fieldcommunications in embedded systemsrdquo EURASIP Journal onEmbedded Systems vol 2013 article 6 2013
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
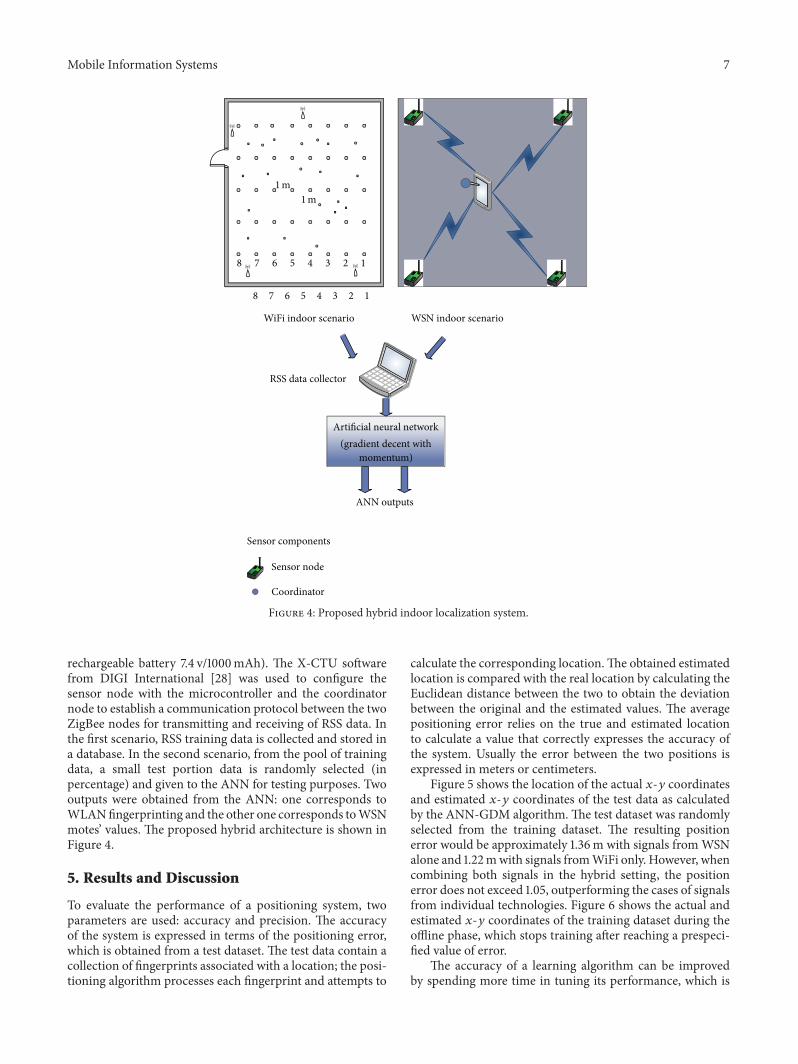
Mobile Information Systems 7
Artificial neural network(gradient decent with
WiFi indoor scenario WSN indoor scenario
Sensor components
RSS data collector
ANN outputs
Sensor node
Coordinator
12345678
12345678
momentum)
1m1m
Figure 4 Proposed hybrid indoor localization system
rechargeable battery 74 v1000mAh) The X-CTU softwarefrom DIGI International [28] was used to configure thesensor node with the microcontroller and the coordinatornode to establish a communication protocol between the twoZigBee nodes for transmitting and receiving of RSS data Inthe first scenario RSS training data is collected and stored ina database In the second scenario from the pool of trainingdata a small test portion data is randomly selected (inpercentage) and given to the ANN for testing purposes Twooutputs were obtained from the ANN one corresponds toWLANfingerprinting and the other one corresponds toWSNmotesrsquo values The proposed hybrid architecture is shown inFigure 4
5 Results and Discussion
To evaluate the performance of a positioning system twoparameters are used accuracy and precision The accuracyof the system is expressed in terms of the positioning errorwhich is obtained from a test dataset The test data contain acollection of fingerprints associated with a location the posi-tioning algorithm processes each fingerprint and attempts to
calculate the corresponding locationThe obtained estimatedlocation is compared with the real location by calculating theEuclidean distance between the two to obtain the deviationbetween the original and the estimated values The averagepositioning error relies on the true and estimated locationto calculate a value that correctly expresses the accuracy ofthe system Usually the error between the two positions isexpressed in meters or centimeters
Figure 5 shows the location of the actual 119909-119910 coordinatesand estimated 119909-119910 coordinates of the test data as calculatedby the ANN-GDM algorithmThe test dataset was randomlyselected from the training dataset The resulting positionerror would be approximately 136m with signals fromWSNalone and 122mwith signals fromWiFi only However whencombining both signals in the hybrid setting the positionerror does not exceed 105 outperforming the cases of signalsfrom individual technologies Figure 6 shows the actual andestimated 119909-119910 coordinates of the training dataset during theoffline phase which stops training after reaching a prespeci-fied value of error
The accuracy of a learning algorithm can be improvedby spending more time in tuning its performance which is
8 Mobile Information Systems
Actual positionEstimated position
0
5
10
15
20
25
Y (m
)
5 0 minus510X (m)
(a) WiFi
Actual positionEstimated position
5 0 minus510X (m)
0
5
10
15
20
25
Y (m
)
(b) WSN
Actual positionEstimated position
4 3 2 15X (m)
15
16
17
18
19
20
21
22
23
Y (m
)
(c) Hybrid
Figure 5 Actual and estimated mean position of the testing dataset of two wireless technologies alone and with hybrid formation
HybridWSNWiFi
101 102 103 104 105 106100
Total number of iterations
0
5
10
15
20
25
30
35
Dist
ance
erro
r (m
)
Figure 6 Training positioning error versus a number of trainingiterations
achieved by allowing a large number of training iterationsin the case of ANN This tradeoff between the accuracy andcomputational time is illustrated in Figure 7
The second parameter of evaluation is defined as thesuccess probability of position calculation with respect topredefined accuracy To evaluate our system with respectto both parameters we present the Cumulative DistributionFunction (CDF) of the error (the difference between the realand calculated location coordinates) Figure 8 shows the CDFplot of the distance error for optimally trained ANN modelRunning the positioning system using the test dataset 50 ofthe time the resulting position error would be approximately14m with signals from WSN alone and 13m with signals
10 5 0 minus5 minus1015X-distance (m)
0
5
10
15
20
Y-d
istan
ce (m
)
Figure 7Actual and estimatedmeanposition of the training datasetbased on hybird
from WiFi only However when combining both signals inthe hybrid setting the position error does not exceed 12m ata probability of 50 outperforming the cases of signals fromindividual technologies
In an attempt to further improve the system accuracywe tried to use GA to optimize the ANN parameters andthereby enhance its performance However the nonopti-mized ANN-GDM performance remained the best choicein terms of accuracy precision stability and computationaltime Applying GA-based optimization in this case did not
Mobile Information Systems 9
Empirical CDF
WiFiWSNHybrid
05 1 15 2 25 30Position error (m)
0010203040506070809
1
CDF
()
Figure 8 CDF localization error of proposed hybrid system
Comparison between ANN-GDM and ANN-GA
ANN-GDMANN-GA
0
5
10
15
20
25
Dist
ance
erro
r (m
)
101 102 103 104 105 106 107100
Epoch
Figure 9 Positioning error versus number of epochs with andwithout GA optimization
incur the expected improvement despite providing a similardecrease in the training error Figure 9 shows the accuracyand computational time in both cases as a function of thenumber of allowed training epochs
The stability of a learning algorithm is one of the impor-tant factors in the neural network [21] It can be defined ashow changes to the training data influence the result of thealgorithm by running the algorithm with same parametersseveral times To evaluate our algorithm to be stable weran the network learning code with various training dataseveral times with the parameters kept constant (hiddennodes learning and momentum rates and initial weights)and the accuracy reached roughly the same value as shownin Figure 10 The value of the distance error as a functionof the number of iterations for four selected training runs isshown in Figure 10 All profiles are roughly the same for allthe performed runs
6 Performance Comparison
The performance of the hybrid indoor localization approachis summarized and compared with several similar research
Position error 1Position error 2
Position error 3Position error 4
101 102 103 104 105 106100
Number of iterations
0
5
10
15
20
25
Dist
ance
erro
r (m
)
Figure 10 Stability analysis of training algorithm
works in Table 2 The considered studies adopted the fin-gerprinting approach for localization and are based on two-dimensional data acquisition When the WiFi and WSN sig-nals are considered separately we achieved average distanceerrors of 122m (using 228 anchor points) and 135m (using96 anchor points) respectively As expected using a largernumber of anchor points a better approximation can beobtained These results show already a better accuracy withrespect to other recently published works Our proposedhybrid indoorWiFi-WSNpositioning system outperforms allprevious results providing an accuracy of 105m when using96 anchor points
7 Conclusion and Future Works
This paper presented a hybrid WiFi-WSN based indoorpositioning system based on the received signal strengthin wireless networks for the purpose of producing bet-ter localization accuracy The joint use of heterogeneoustechnologies can overcome the limitations of each technol-ogy We employed an ANN model using gradient descentwith momentum learning algorithm for location predictiontrained and tested in a heterogeneous environment We alsoconducted an extensive set of experiments in the real indoorscenario to evaluate the performance of our proposal Resultswere derived with and without GA optimization techniquein terms of accuracy precision stability and computationaltime In addition the accuracy of the proposed hybrid indoorpositioning system was compared with other well-knownhybrid systems (probabilistic and deterministic) which havebeen used for indoor localization The hybrid indoor posi-tioning system presented in this paper had the advantage ofbetter accuracy low cost and easy expansibility We believethe system can be used to locate people and assets in severalfields including those of logistics healthcare and manu-facturing Our planned future work includes the extensionof the current research into implementations of hybrid 3Dindoor environments in amultifloor scenario In addition theproposed algorithmwill be evaluated over a larger area to testthe robustness of the algorithm
10 Mobile Information Systems
Table 2 Comparison between the proposed hybrid indoor positioning system and previous hybrid indoor positioning studies
Reference Hybrid positionsystems Type of study Test area Total number of
anchor points Accuracy Implementation
[12] WSN + RFID Experimental 5 times 30m 148(approx) 16m
Fingerprinting +extended Kalmanfilter approach
[29] WiFi +bluetooth
Experimental ampsimulation 50m 24 175m Fingerprinting
approach
[30] WiFi + RFID Experimental 25 times 12m 80(approx) 16m
Fingerprinting +particle filterapproach
Our WiFidata (alone) WiFi Experimental 25 times 28 228 122
Fingerprinting +artificial neural
network
Our WSNdata (alone) WSN Experimental 10 times 28 96 136
Fingerprinting +artificial neural
networkProposedhybridindoorsystem
WiFi + WSN Experimental 10 times 28m 96 105mFingerprinting +artificial neural
network
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors acknowledge support from Grant Ref no GUP-2014-005 and Universiti Kebangsaan Malaysia
References
[1] S Joana Halder and W Kim ldquoA fusion approach of RSSI andLQI for indoor localization system using adaptive smoothersrdquoJournal of Computer Networks and Communications vol 2012Article ID 790374 10 pages 2012
[2] Z Xiong Hybrid and cooperative positioning solutions forwireless networks [PhD thesis] 2014
[3] S C Mukhopadhyay ldquoWearable sensors for human activitymonitoring a reviewrdquo IEEE Sensors Journal vol 15 no 3 pp1321ndash1330 2015
[4] G Ciuti L Ricotti A Menciassi and P Dario ldquoMEMS sensortechnologies for human centred applications in healthcarephysical activities safety and environmental sensing a reviewon research activities in Italyrdquo Sensors vol 15 no 3 pp 6441ndash6468 2015
[5] G P Zhang ldquoNeural networks for classification a surveyrdquo IEEETransactions on Systems Man and Cybernetics Part C Applica-tions and Reviews vol 30 no 4 pp 451ndash462 2000
[6] H Mehmood N K Tripathi and T Tipdecho ldquoIndoorpositioning system using artificial neural networkrdquo Journal ofComputer Science vol 6 no 10 pp 1219ndash1225 2010
[7] J McCall ldquoGenetic algorithms formodelling and optimisationrdquoJournal of Computational and AppliedMathematics vol 184 no1 pp 205ndash222 2005
[8] Y Liu and Z Yang Location Localization and LocalizabilityLocation-Awareness Technology for Wireless Networks Springer2010
[9] J Yiming ldquoIndoor location determinationrdquo in Location-BasedServices Handbook CRC Press New York NY USA 2010
[10] A De Gante and M Siller ldquoA survey of hybrid schemesfor location estimation in wireless sensor networksrdquo ProcediaTechnology vol 7 pp 377ndash383 2013
[11] D Zhang Y Yang D Cheng S Liu and LM Ni ldquoCOCKTAILan RF-based hybrid approach for indoor localizationrdquo in Pro-ceedings of the IEEE International Conference on Communica-tions (ICC rsquo10) pp 1ndash5 May 2010
[12] L-H Chen E H-K Wu M-H Jin and G-H Chen ldquoIntel-ligent fusion of Wi-Fi and inertial sensor-based positioningsystems for indoor pedestrian navigationrdquo IEEE Sensors Journalvol 14 no 11 pp 4034ndash4042 2014
[13] M A Bitew R-S Hsiao H-P Lin and D-B Lin ldquoHybridindoor human localization system for addressing the issueof RSS variation in fingerprintingrdquo International Journal ofDistributed Sensor Networks vol 2015 Article ID 831423 9pages 2015
[14] J Li B Zhang H Liu L Yu and Z Wang ldquoAn indoor hybridlocalization approach based on signal propagation model andfingerprintingrdquo International Journal of Smart Home vol 7 no6 pp 157ndash170 2013
[15] A Bahillo S Mazuelas R M Lorenzo et al ldquoHybrid RSS-RTTlocalization scheme for indoor wireless networksrdquo EURASIPJournal on Advances in Signal Processing vol 2010 Article ID126082 2010
[16] J Cheng Y Cai Q Zhang J Cheng and C Yan ldquoA new three-dimensional indoor positioning mechanism based on wirelessLANrdquoMathematical Problems in Engineering vol 2014 ArticleID 862347 7 pages 2014
[17] R C Luo and O Chen ldquoWireless and pyroelectric sensoryfusion system for indoor humanrobot localization and mon-itoringrdquo IEEEASME Transactions on Mechatronics vol 18 no3 pp 845ndash853 2013
Mobile Information Systems 11
[18] F Subhan H Hasbullah and K Ashraf ldquoKalman filter-basedhybrid indoor position estimation technique in bluetoothnetworksrdquo International Journal of Navigation and Observationvol 2013 Article ID 570964 13 pages 2013
[19] S-H Fang and T-N Lin ldquoIndoor location system based ondiscriminant-adaptive neural network in IEEE 80211 environ-mentsrdquo IEEETransactions onNeural Networks vol 19 no 11 pp1973ndash1978 2008
[20] N Qian ldquoOn the momentum term in gradient descent learningalgorithmsrdquo Neural Networks vol 12 no 1 pp 145ndash151 1999
[21] K Gopalsamy ldquoStability of artificial neural networks withimpulsesrdquo Applied Mathematics and Computation vol 154 no3 pp 783ndash813 2004
[22] H Zou X Lu H Jiang and L Xie ldquoA fast and precise indoorlocalization algorithm based on an online sequential extremelearning machinerdquo Sensors vol 15 no 1 pp 1804ndash1824 2015
[23] C Y J So J-Y Lee C-H Yoon and H Park ldquoAn improvedlocation estimation method for Wifi fingerprint-based indoorlocalizationrdquo International Journal of Software Engineering andIts Applications vol 7 no 3 pp 77ndash86 2013
[24] Z Farid R Nordin W M A W Daud and S Z HasanldquoLeveraging existing WLAN infrastructure for wireless indoorpositioning based on fingerprinting and clustering techniquerdquoin Proceedings of the 13th International Conference on Electron-ics Information and Communication (ICEIC rsquo14) pp 1ndash4 KotaKinabalu Malaysia January 2014
[25] InSSIDer by metageek httpwwwmetageeknet[26] J S Lee and Y M Wang ldquoExperimental evaluation of ZigBee-
based wireless networks in indoor environmentsrdquo Journal ofEngineering vol 2013 Article ID 286367 9 pages 2013
[27] S K Gharghan R Nordin and M Ismail ldquoEnergy-efficientZigBee-based wireless sensor network for track bicycle perfor-mancemonitoringrdquo Sensors vol 14 no 8 pp 15573ndash15592 2014
[28] XBeeXBee-pro RF Modules 2015 httpwwwdigicom[29] A Baniukevic C S Jensen andH Lu ldquoHybrid indoor position-
ingwithWi-Fi and bluetooth architecture and performancerdquo inProceedings of the IEEE 14th International Conference on MobileData Management (MDM rsquo13) pp 207ndash216 IEEE Milan ItalyJune 2013
[30] Z Xiong Z Song A Scalera et al ldquoHybrid WSN and RFIDindoor positioning and tracking system RFID and near fieldcommunications in embedded systemsrdquo EURASIP Journal onEmbedded Systems vol 2013 article 6 2013
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
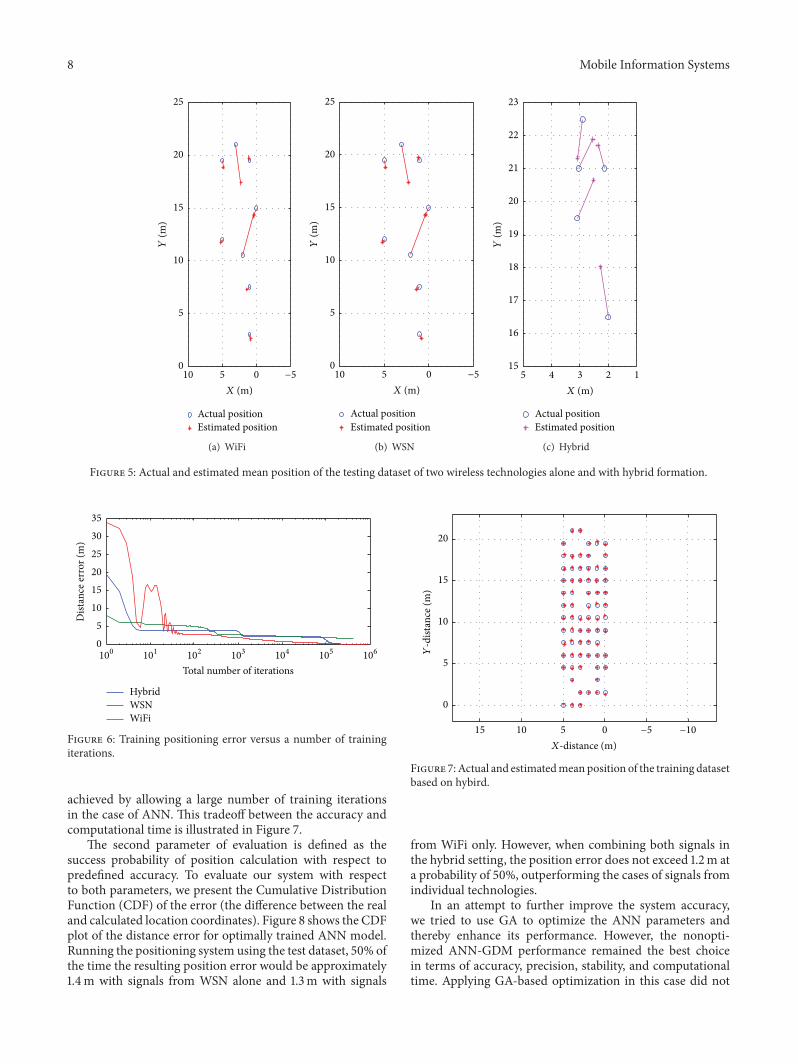
8 Mobile Information Systems
Actual positionEstimated position
0
5
10
15
20
25
Y (m
)
5 0 minus510X (m)
(a) WiFi
Actual positionEstimated position
5 0 minus510X (m)
0
5
10
15
20
25
Y (m
)
(b) WSN
Actual positionEstimated position
4 3 2 15X (m)
15
16
17
18
19
20
21
22
23
Y (m
)
(c) Hybrid
Figure 5 Actual and estimated mean position of the testing dataset of two wireless technologies alone and with hybrid formation
HybridWSNWiFi
101 102 103 104 105 106100
Total number of iterations
0
5
10
15
20
25
30
35
Dist
ance
erro
r (m
)
Figure 6 Training positioning error versus a number of trainingiterations
achieved by allowing a large number of training iterationsin the case of ANN This tradeoff between the accuracy andcomputational time is illustrated in Figure 7
The second parameter of evaluation is defined as thesuccess probability of position calculation with respect topredefined accuracy To evaluate our system with respectto both parameters we present the Cumulative DistributionFunction (CDF) of the error (the difference between the realand calculated location coordinates) Figure 8 shows the CDFplot of the distance error for optimally trained ANN modelRunning the positioning system using the test dataset 50 ofthe time the resulting position error would be approximately14m with signals from WSN alone and 13m with signals
10 5 0 minus5 minus1015X-distance (m)
0
5
10
15
20
Y-d
istan
ce (m
)
Figure 7Actual and estimatedmeanposition of the training datasetbased on hybird
from WiFi only However when combining both signals inthe hybrid setting the position error does not exceed 12m ata probability of 50 outperforming the cases of signals fromindividual technologies
In an attempt to further improve the system accuracywe tried to use GA to optimize the ANN parameters andthereby enhance its performance However the nonopti-mized ANN-GDM performance remained the best choicein terms of accuracy precision stability and computationaltime Applying GA-based optimization in this case did not
Mobile Information Systems 9
Empirical CDF
WiFiWSNHybrid
05 1 15 2 25 30Position error (m)
0010203040506070809
1
CDF
()
Figure 8 CDF localization error of proposed hybrid system
Comparison between ANN-GDM and ANN-GA
ANN-GDMANN-GA
0
5
10
15
20
25
Dist
ance
erro
r (m
)
101 102 103 104 105 106 107100
Epoch
Figure 9 Positioning error versus number of epochs with andwithout GA optimization
incur the expected improvement despite providing a similardecrease in the training error Figure 9 shows the accuracyand computational time in both cases as a function of thenumber of allowed training epochs
The stability of a learning algorithm is one of the impor-tant factors in the neural network [21] It can be defined ashow changes to the training data influence the result of thealgorithm by running the algorithm with same parametersseveral times To evaluate our algorithm to be stable weran the network learning code with various training dataseveral times with the parameters kept constant (hiddennodes learning and momentum rates and initial weights)and the accuracy reached roughly the same value as shownin Figure 10 The value of the distance error as a functionof the number of iterations for four selected training runs isshown in Figure 10 All profiles are roughly the same for allthe performed runs
6 Performance Comparison
The performance of the hybrid indoor localization approachis summarized and compared with several similar research
Position error 1Position error 2
Position error 3Position error 4
101 102 103 104 105 106100
Number of iterations
0
5
10
15
20
25
Dist
ance
erro
r (m
)
Figure 10 Stability analysis of training algorithm
works in Table 2 The considered studies adopted the fin-gerprinting approach for localization and are based on two-dimensional data acquisition When the WiFi and WSN sig-nals are considered separately we achieved average distanceerrors of 122m (using 228 anchor points) and 135m (using96 anchor points) respectively As expected using a largernumber of anchor points a better approximation can beobtained These results show already a better accuracy withrespect to other recently published works Our proposedhybrid indoorWiFi-WSNpositioning system outperforms allprevious results providing an accuracy of 105m when using96 anchor points
7 Conclusion and Future Works
This paper presented a hybrid WiFi-WSN based indoorpositioning system based on the received signal strengthin wireless networks for the purpose of producing bet-ter localization accuracy The joint use of heterogeneoustechnologies can overcome the limitations of each technol-ogy We employed an ANN model using gradient descentwith momentum learning algorithm for location predictiontrained and tested in a heterogeneous environment We alsoconducted an extensive set of experiments in the real indoorscenario to evaluate the performance of our proposal Resultswere derived with and without GA optimization techniquein terms of accuracy precision stability and computationaltime In addition the accuracy of the proposed hybrid indoorpositioning system was compared with other well-knownhybrid systems (probabilistic and deterministic) which havebeen used for indoor localization The hybrid indoor posi-tioning system presented in this paper had the advantage ofbetter accuracy low cost and easy expansibility We believethe system can be used to locate people and assets in severalfields including those of logistics healthcare and manu-facturing Our planned future work includes the extensionof the current research into implementations of hybrid 3Dindoor environments in amultifloor scenario In addition theproposed algorithmwill be evaluated over a larger area to testthe robustness of the algorithm
10 Mobile Information Systems
Table 2 Comparison between the proposed hybrid indoor positioning system and previous hybrid indoor positioning studies
Reference Hybrid positionsystems Type of study Test area Total number of
anchor points Accuracy Implementation
[12] WSN + RFID Experimental 5 times 30m 148(approx) 16m
Fingerprinting +extended Kalmanfilter approach
[29] WiFi +bluetooth
Experimental ampsimulation 50m 24 175m Fingerprinting
approach
[30] WiFi + RFID Experimental 25 times 12m 80(approx) 16m
Fingerprinting +particle filterapproach
Our WiFidata (alone) WiFi Experimental 25 times 28 228 122
Fingerprinting +artificial neural
network
Our WSNdata (alone) WSN Experimental 10 times 28 96 136
Fingerprinting +artificial neural
networkProposedhybridindoorsystem
WiFi + WSN Experimental 10 times 28m 96 105mFingerprinting +artificial neural
network
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors acknowledge support from Grant Ref no GUP-2014-005 and Universiti Kebangsaan Malaysia
References
[1] S Joana Halder and W Kim ldquoA fusion approach of RSSI andLQI for indoor localization system using adaptive smoothersrdquoJournal of Computer Networks and Communications vol 2012Article ID 790374 10 pages 2012
[2] Z Xiong Hybrid and cooperative positioning solutions forwireless networks [PhD thesis] 2014
[3] S C Mukhopadhyay ldquoWearable sensors for human activitymonitoring a reviewrdquo IEEE Sensors Journal vol 15 no 3 pp1321ndash1330 2015
[4] G Ciuti L Ricotti A Menciassi and P Dario ldquoMEMS sensortechnologies for human centred applications in healthcarephysical activities safety and environmental sensing a reviewon research activities in Italyrdquo Sensors vol 15 no 3 pp 6441ndash6468 2015
[5] G P Zhang ldquoNeural networks for classification a surveyrdquo IEEETransactions on Systems Man and Cybernetics Part C Applica-tions and Reviews vol 30 no 4 pp 451ndash462 2000
[6] H Mehmood N K Tripathi and T Tipdecho ldquoIndoorpositioning system using artificial neural networkrdquo Journal ofComputer Science vol 6 no 10 pp 1219ndash1225 2010
[7] J McCall ldquoGenetic algorithms formodelling and optimisationrdquoJournal of Computational and AppliedMathematics vol 184 no1 pp 205ndash222 2005
[8] Y Liu and Z Yang Location Localization and LocalizabilityLocation-Awareness Technology for Wireless Networks Springer2010
[9] J Yiming ldquoIndoor location determinationrdquo in Location-BasedServices Handbook CRC Press New York NY USA 2010
[10] A De Gante and M Siller ldquoA survey of hybrid schemesfor location estimation in wireless sensor networksrdquo ProcediaTechnology vol 7 pp 377ndash383 2013
[11] D Zhang Y Yang D Cheng S Liu and LM Ni ldquoCOCKTAILan RF-based hybrid approach for indoor localizationrdquo in Pro-ceedings of the IEEE International Conference on Communica-tions (ICC rsquo10) pp 1ndash5 May 2010
[12] L-H Chen E H-K Wu M-H Jin and G-H Chen ldquoIntel-ligent fusion of Wi-Fi and inertial sensor-based positioningsystems for indoor pedestrian navigationrdquo IEEE Sensors Journalvol 14 no 11 pp 4034ndash4042 2014
[13] M A Bitew R-S Hsiao H-P Lin and D-B Lin ldquoHybridindoor human localization system for addressing the issueof RSS variation in fingerprintingrdquo International Journal ofDistributed Sensor Networks vol 2015 Article ID 831423 9pages 2015
[14] J Li B Zhang H Liu L Yu and Z Wang ldquoAn indoor hybridlocalization approach based on signal propagation model andfingerprintingrdquo International Journal of Smart Home vol 7 no6 pp 157ndash170 2013
[15] A Bahillo S Mazuelas R M Lorenzo et al ldquoHybrid RSS-RTTlocalization scheme for indoor wireless networksrdquo EURASIPJournal on Advances in Signal Processing vol 2010 Article ID126082 2010
[16] J Cheng Y Cai Q Zhang J Cheng and C Yan ldquoA new three-dimensional indoor positioning mechanism based on wirelessLANrdquoMathematical Problems in Engineering vol 2014 ArticleID 862347 7 pages 2014
[17] R C Luo and O Chen ldquoWireless and pyroelectric sensoryfusion system for indoor humanrobot localization and mon-itoringrdquo IEEEASME Transactions on Mechatronics vol 18 no3 pp 845ndash853 2013
Mobile Information Systems 11
[18] F Subhan H Hasbullah and K Ashraf ldquoKalman filter-basedhybrid indoor position estimation technique in bluetoothnetworksrdquo International Journal of Navigation and Observationvol 2013 Article ID 570964 13 pages 2013
[19] S-H Fang and T-N Lin ldquoIndoor location system based ondiscriminant-adaptive neural network in IEEE 80211 environ-mentsrdquo IEEETransactions onNeural Networks vol 19 no 11 pp1973ndash1978 2008
[20] N Qian ldquoOn the momentum term in gradient descent learningalgorithmsrdquo Neural Networks vol 12 no 1 pp 145ndash151 1999
[21] K Gopalsamy ldquoStability of artificial neural networks withimpulsesrdquo Applied Mathematics and Computation vol 154 no3 pp 783ndash813 2004
[22] H Zou X Lu H Jiang and L Xie ldquoA fast and precise indoorlocalization algorithm based on an online sequential extremelearning machinerdquo Sensors vol 15 no 1 pp 1804ndash1824 2015
[23] C Y J So J-Y Lee C-H Yoon and H Park ldquoAn improvedlocation estimation method for Wifi fingerprint-based indoorlocalizationrdquo International Journal of Software Engineering andIts Applications vol 7 no 3 pp 77ndash86 2013
[24] Z Farid R Nordin W M A W Daud and S Z HasanldquoLeveraging existing WLAN infrastructure for wireless indoorpositioning based on fingerprinting and clustering techniquerdquoin Proceedings of the 13th International Conference on Electron-ics Information and Communication (ICEIC rsquo14) pp 1ndash4 KotaKinabalu Malaysia January 2014
[25] InSSIDer by metageek httpwwwmetageeknet[26] J S Lee and Y M Wang ldquoExperimental evaluation of ZigBee-
based wireless networks in indoor environmentsrdquo Journal ofEngineering vol 2013 Article ID 286367 9 pages 2013
[27] S K Gharghan R Nordin and M Ismail ldquoEnergy-efficientZigBee-based wireless sensor network for track bicycle perfor-mancemonitoringrdquo Sensors vol 14 no 8 pp 15573ndash15592 2014
[28] XBeeXBee-pro RF Modules 2015 httpwwwdigicom[29] A Baniukevic C S Jensen andH Lu ldquoHybrid indoor position-
ingwithWi-Fi and bluetooth architecture and performancerdquo inProceedings of the IEEE 14th International Conference on MobileData Management (MDM rsquo13) pp 207ndash216 IEEE Milan ItalyJune 2013
[30] Z Xiong Z Song A Scalera et al ldquoHybrid WSN and RFIDindoor positioning and tracking system RFID and near fieldcommunications in embedded systemsrdquo EURASIP Journal onEmbedded Systems vol 2013 article 6 2013
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
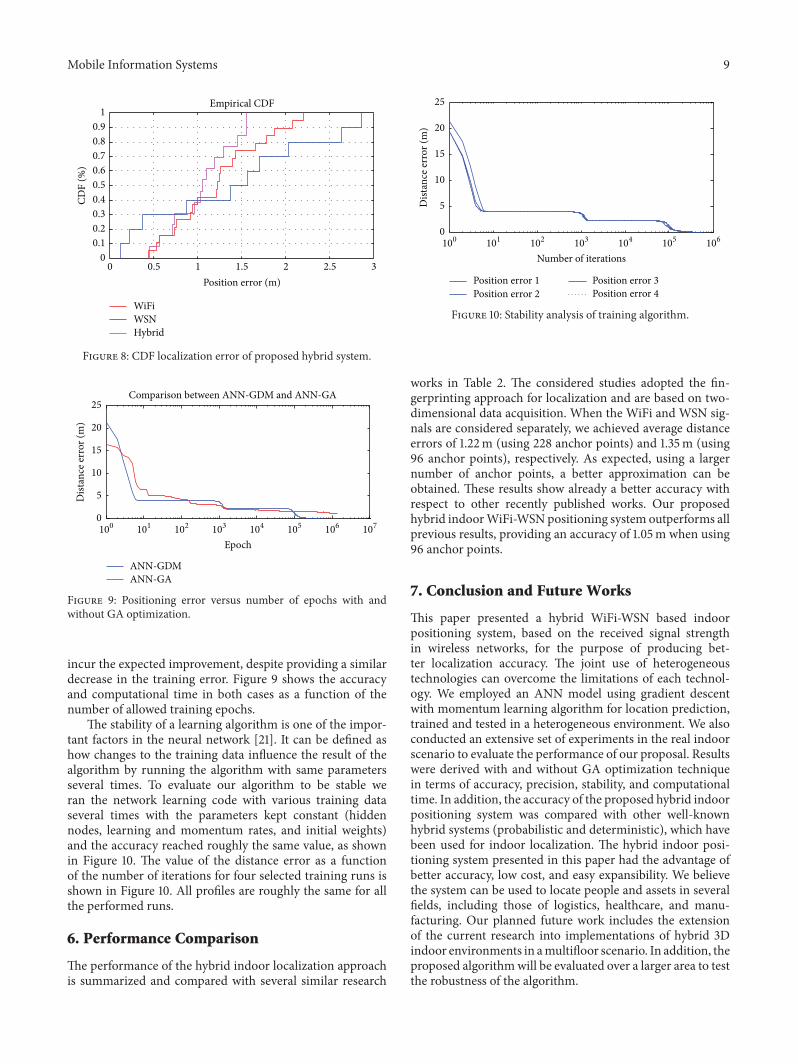
Mobile Information Systems 9
Empirical CDF
WiFiWSNHybrid
05 1 15 2 25 30Position error (m)
0010203040506070809
1
CDF
()
Figure 8 CDF localization error of proposed hybrid system
Comparison between ANN-GDM and ANN-GA
ANN-GDMANN-GA
0
5
10
15
20
25
Dist
ance
erro
r (m
)
101 102 103 104 105 106 107100
Epoch
Figure 9 Positioning error versus number of epochs with andwithout GA optimization
incur the expected improvement despite providing a similardecrease in the training error Figure 9 shows the accuracyand computational time in both cases as a function of thenumber of allowed training epochs
The stability of a learning algorithm is one of the impor-tant factors in the neural network [21] It can be defined ashow changes to the training data influence the result of thealgorithm by running the algorithm with same parametersseveral times To evaluate our algorithm to be stable weran the network learning code with various training dataseveral times with the parameters kept constant (hiddennodes learning and momentum rates and initial weights)and the accuracy reached roughly the same value as shownin Figure 10 The value of the distance error as a functionof the number of iterations for four selected training runs isshown in Figure 10 All profiles are roughly the same for allthe performed runs
6 Performance Comparison
The performance of the hybrid indoor localization approachis summarized and compared with several similar research
Position error 1Position error 2
Position error 3Position error 4
101 102 103 104 105 106100
Number of iterations
0
5
10
15
20
25
Dist
ance
erro
r (m
)
Figure 10 Stability analysis of training algorithm
works in Table 2 The considered studies adopted the fin-gerprinting approach for localization and are based on two-dimensional data acquisition When the WiFi and WSN sig-nals are considered separately we achieved average distanceerrors of 122m (using 228 anchor points) and 135m (using96 anchor points) respectively As expected using a largernumber of anchor points a better approximation can beobtained These results show already a better accuracy withrespect to other recently published works Our proposedhybrid indoorWiFi-WSNpositioning system outperforms allprevious results providing an accuracy of 105m when using96 anchor points
7 Conclusion and Future Works
This paper presented a hybrid WiFi-WSN based indoorpositioning system based on the received signal strengthin wireless networks for the purpose of producing bet-ter localization accuracy The joint use of heterogeneoustechnologies can overcome the limitations of each technol-ogy We employed an ANN model using gradient descentwith momentum learning algorithm for location predictiontrained and tested in a heterogeneous environment We alsoconducted an extensive set of experiments in the real indoorscenario to evaluate the performance of our proposal Resultswere derived with and without GA optimization techniquein terms of accuracy precision stability and computationaltime In addition the accuracy of the proposed hybrid indoorpositioning system was compared with other well-knownhybrid systems (probabilistic and deterministic) which havebeen used for indoor localization The hybrid indoor posi-tioning system presented in this paper had the advantage ofbetter accuracy low cost and easy expansibility We believethe system can be used to locate people and assets in severalfields including those of logistics healthcare and manu-facturing Our planned future work includes the extensionof the current research into implementations of hybrid 3Dindoor environments in amultifloor scenario In addition theproposed algorithmwill be evaluated over a larger area to testthe robustness of the algorithm
10 Mobile Information Systems
Table 2 Comparison between the proposed hybrid indoor positioning system and previous hybrid indoor positioning studies
Reference Hybrid positionsystems Type of study Test area Total number of
anchor points Accuracy Implementation
[12] WSN + RFID Experimental 5 times 30m 148(approx) 16m
Fingerprinting +extended Kalmanfilter approach
[29] WiFi +bluetooth
Experimental ampsimulation 50m 24 175m Fingerprinting
approach
[30] WiFi + RFID Experimental 25 times 12m 80(approx) 16m
Fingerprinting +particle filterapproach
Our WiFidata (alone) WiFi Experimental 25 times 28 228 122
Fingerprinting +artificial neural
network
Our WSNdata (alone) WSN Experimental 10 times 28 96 136
Fingerprinting +artificial neural
networkProposedhybridindoorsystem
WiFi + WSN Experimental 10 times 28m 96 105mFingerprinting +artificial neural
network
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors acknowledge support from Grant Ref no GUP-2014-005 and Universiti Kebangsaan Malaysia
References
[1] S Joana Halder and W Kim ldquoA fusion approach of RSSI andLQI for indoor localization system using adaptive smoothersrdquoJournal of Computer Networks and Communications vol 2012Article ID 790374 10 pages 2012
[2] Z Xiong Hybrid and cooperative positioning solutions forwireless networks [PhD thesis] 2014
[3] S C Mukhopadhyay ldquoWearable sensors for human activitymonitoring a reviewrdquo IEEE Sensors Journal vol 15 no 3 pp1321ndash1330 2015
[4] G Ciuti L Ricotti A Menciassi and P Dario ldquoMEMS sensortechnologies for human centred applications in healthcarephysical activities safety and environmental sensing a reviewon research activities in Italyrdquo Sensors vol 15 no 3 pp 6441ndash6468 2015
[5] G P Zhang ldquoNeural networks for classification a surveyrdquo IEEETransactions on Systems Man and Cybernetics Part C Applica-tions and Reviews vol 30 no 4 pp 451ndash462 2000
[6] H Mehmood N K Tripathi and T Tipdecho ldquoIndoorpositioning system using artificial neural networkrdquo Journal ofComputer Science vol 6 no 10 pp 1219ndash1225 2010
[7] J McCall ldquoGenetic algorithms formodelling and optimisationrdquoJournal of Computational and AppliedMathematics vol 184 no1 pp 205ndash222 2005
[8] Y Liu and Z Yang Location Localization and LocalizabilityLocation-Awareness Technology for Wireless Networks Springer2010
[9] J Yiming ldquoIndoor location determinationrdquo in Location-BasedServices Handbook CRC Press New York NY USA 2010
[10] A De Gante and M Siller ldquoA survey of hybrid schemesfor location estimation in wireless sensor networksrdquo ProcediaTechnology vol 7 pp 377ndash383 2013
[11] D Zhang Y Yang D Cheng S Liu and LM Ni ldquoCOCKTAILan RF-based hybrid approach for indoor localizationrdquo in Pro-ceedings of the IEEE International Conference on Communica-tions (ICC rsquo10) pp 1ndash5 May 2010
[12] L-H Chen E H-K Wu M-H Jin and G-H Chen ldquoIntel-ligent fusion of Wi-Fi and inertial sensor-based positioningsystems for indoor pedestrian navigationrdquo IEEE Sensors Journalvol 14 no 11 pp 4034ndash4042 2014
[13] M A Bitew R-S Hsiao H-P Lin and D-B Lin ldquoHybridindoor human localization system for addressing the issueof RSS variation in fingerprintingrdquo International Journal ofDistributed Sensor Networks vol 2015 Article ID 831423 9pages 2015
[14] J Li B Zhang H Liu L Yu and Z Wang ldquoAn indoor hybridlocalization approach based on signal propagation model andfingerprintingrdquo International Journal of Smart Home vol 7 no6 pp 157ndash170 2013
[15] A Bahillo S Mazuelas R M Lorenzo et al ldquoHybrid RSS-RTTlocalization scheme for indoor wireless networksrdquo EURASIPJournal on Advances in Signal Processing vol 2010 Article ID126082 2010
[16] J Cheng Y Cai Q Zhang J Cheng and C Yan ldquoA new three-dimensional indoor positioning mechanism based on wirelessLANrdquoMathematical Problems in Engineering vol 2014 ArticleID 862347 7 pages 2014
[17] R C Luo and O Chen ldquoWireless and pyroelectric sensoryfusion system for indoor humanrobot localization and mon-itoringrdquo IEEEASME Transactions on Mechatronics vol 18 no3 pp 845ndash853 2013
Mobile Information Systems 11
[18] F Subhan H Hasbullah and K Ashraf ldquoKalman filter-basedhybrid indoor position estimation technique in bluetoothnetworksrdquo International Journal of Navigation and Observationvol 2013 Article ID 570964 13 pages 2013
[19] S-H Fang and T-N Lin ldquoIndoor location system based ondiscriminant-adaptive neural network in IEEE 80211 environ-mentsrdquo IEEETransactions onNeural Networks vol 19 no 11 pp1973ndash1978 2008
[20] N Qian ldquoOn the momentum term in gradient descent learningalgorithmsrdquo Neural Networks vol 12 no 1 pp 145ndash151 1999
[21] K Gopalsamy ldquoStability of artificial neural networks withimpulsesrdquo Applied Mathematics and Computation vol 154 no3 pp 783ndash813 2004
[22] H Zou X Lu H Jiang and L Xie ldquoA fast and precise indoorlocalization algorithm based on an online sequential extremelearning machinerdquo Sensors vol 15 no 1 pp 1804ndash1824 2015
[23] C Y J So J-Y Lee C-H Yoon and H Park ldquoAn improvedlocation estimation method for Wifi fingerprint-based indoorlocalizationrdquo International Journal of Software Engineering andIts Applications vol 7 no 3 pp 77ndash86 2013
[24] Z Farid R Nordin W M A W Daud and S Z HasanldquoLeveraging existing WLAN infrastructure for wireless indoorpositioning based on fingerprinting and clustering techniquerdquoin Proceedings of the 13th International Conference on Electron-ics Information and Communication (ICEIC rsquo14) pp 1ndash4 KotaKinabalu Malaysia January 2014
[25] InSSIDer by metageek httpwwwmetageeknet[26] J S Lee and Y M Wang ldquoExperimental evaluation of ZigBee-
based wireless networks in indoor environmentsrdquo Journal ofEngineering vol 2013 Article ID 286367 9 pages 2013
[27] S K Gharghan R Nordin and M Ismail ldquoEnergy-efficientZigBee-based wireless sensor network for track bicycle perfor-mancemonitoringrdquo Sensors vol 14 no 8 pp 15573ndash15592 2014
[28] XBeeXBee-pro RF Modules 2015 httpwwwdigicom[29] A Baniukevic C S Jensen andH Lu ldquoHybrid indoor position-
ingwithWi-Fi and bluetooth architecture and performancerdquo inProceedings of the IEEE 14th International Conference on MobileData Management (MDM rsquo13) pp 207ndash216 IEEE Milan ItalyJune 2013
[30] Z Xiong Z Song A Scalera et al ldquoHybrid WSN and RFIDindoor positioning and tracking system RFID and near fieldcommunications in embedded systemsrdquo EURASIP Journal onEmbedded Systems vol 2013 article 6 2013
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
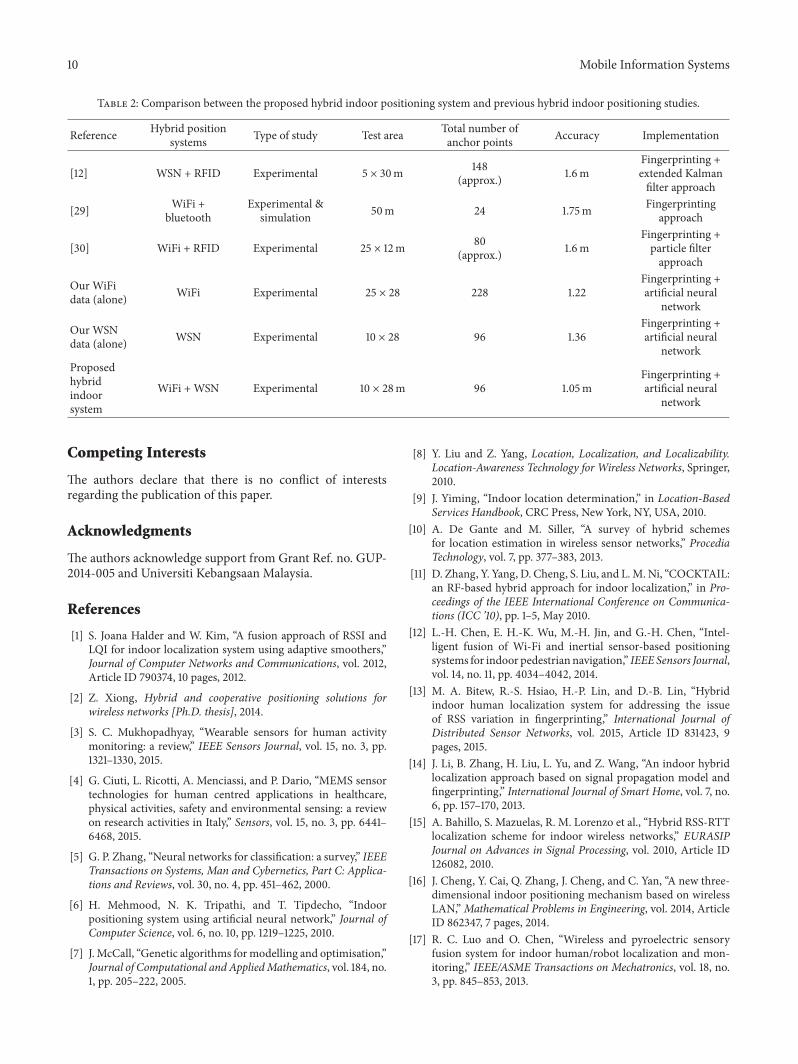
10 Mobile Information Systems
Table 2 Comparison between the proposed hybrid indoor positioning system and previous hybrid indoor positioning studies
Reference Hybrid positionsystems Type of study Test area Total number of
anchor points Accuracy Implementation
[12] WSN + RFID Experimental 5 times 30m 148(approx) 16m
Fingerprinting +extended Kalmanfilter approach
[29] WiFi +bluetooth
Experimental ampsimulation 50m 24 175m Fingerprinting
approach
[30] WiFi + RFID Experimental 25 times 12m 80(approx) 16m
Fingerprinting +particle filterapproach
Our WiFidata (alone) WiFi Experimental 25 times 28 228 122
Fingerprinting +artificial neural
network
Our WSNdata (alone) WSN Experimental 10 times 28 96 136
Fingerprinting +artificial neural
networkProposedhybridindoorsystem
WiFi + WSN Experimental 10 times 28m 96 105mFingerprinting +artificial neural
network
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors acknowledge support from Grant Ref no GUP-2014-005 and Universiti Kebangsaan Malaysia
References
[1] S Joana Halder and W Kim ldquoA fusion approach of RSSI andLQI for indoor localization system using adaptive smoothersrdquoJournal of Computer Networks and Communications vol 2012Article ID 790374 10 pages 2012
[2] Z Xiong Hybrid and cooperative positioning solutions forwireless networks [PhD thesis] 2014
[3] S C Mukhopadhyay ldquoWearable sensors for human activitymonitoring a reviewrdquo IEEE Sensors Journal vol 15 no 3 pp1321ndash1330 2015
[4] G Ciuti L Ricotti A Menciassi and P Dario ldquoMEMS sensortechnologies for human centred applications in healthcarephysical activities safety and environmental sensing a reviewon research activities in Italyrdquo Sensors vol 15 no 3 pp 6441ndash6468 2015
[5] G P Zhang ldquoNeural networks for classification a surveyrdquo IEEETransactions on Systems Man and Cybernetics Part C Applica-tions and Reviews vol 30 no 4 pp 451ndash462 2000
[6] H Mehmood N K Tripathi and T Tipdecho ldquoIndoorpositioning system using artificial neural networkrdquo Journal ofComputer Science vol 6 no 10 pp 1219ndash1225 2010
[7] J McCall ldquoGenetic algorithms formodelling and optimisationrdquoJournal of Computational and AppliedMathematics vol 184 no1 pp 205ndash222 2005
[8] Y Liu and Z Yang Location Localization and LocalizabilityLocation-Awareness Technology for Wireless Networks Springer2010
[9] J Yiming ldquoIndoor location determinationrdquo in Location-BasedServices Handbook CRC Press New York NY USA 2010
[10] A De Gante and M Siller ldquoA survey of hybrid schemesfor location estimation in wireless sensor networksrdquo ProcediaTechnology vol 7 pp 377ndash383 2013
[11] D Zhang Y Yang D Cheng S Liu and LM Ni ldquoCOCKTAILan RF-based hybrid approach for indoor localizationrdquo in Pro-ceedings of the IEEE International Conference on Communica-tions (ICC rsquo10) pp 1ndash5 May 2010
[12] L-H Chen E H-K Wu M-H Jin and G-H Chen ldquoIntel-ligent fusion of Wi-Fi and inertial sensor-based positioningsystems for indoor pedestrian navigationrdquo IEEE Sensors Journalvol 14 no 11 pp 4034ndash4042 2014
[13] M A Bitew R-S Hsiao H-P Lin and D-B Lin ldquoHybridindoor human localization system for addressing the issueof RSS variation in fingerprintingrdquo International Journal ofDistributed Sensor Networks vol 2015 Article ID 831423 9pages 2015
[14] J Li B Zhang H Liu L Yu and Z Wang ldquoAn indoor hybridlocalization approach based on signal propagation model andfingerprintingrdquo International Journal of Smart Home vol 7 no6 pp 157ndash170 2013
[15] A Bahillo S Mazuelas R M Lorenzo et al ldquoHybrid RSS-RTTlocalization scheme for indoor wireless networksrdquo EURASIPJournal on Advances in Signal Processing vol 2010 Article ID126082 2010
[16] J Cheng Y Cai Q Zhang J Cheng and C Yan ldquoA new three-dimensional indoor positioning mechanism based on wirelessLANrdquoMathematical Problems in Engineering vol 2014 ArticleID 862347 7 pages 2014
[17] R C Luo and O Chen ldquoWireless and pyroelectric sensoryfusion system for indoor humanrobot localization and mon-itoringrdquo IEEEASME Transactions on Mechatronics vol 18 no3 pp 845ndash853 2013
Mobile Information Systems 11
[18] F Subhan H Hasbullah and K Ashraf ldquoKalman filter-basedhybrid indoor position estimation technique in bluetoothnetworksrdquo International Journal of Navigation and Observationvol 2013 Article ID 570964 13 pages 2013
[19] S-H Fang and T-N Lin ldquoIndoor location system based ondiscriminant-adaptive neural network in IEEE 80211 environ-mentsrdquo IEEETransactions onNeural Networks vol 19 no 11 pp1973ndash1978 2008
[20] N Qian ldquoOn the momentum term in gradient descent learningalgorithmsrdquo Neural Networks vol 12 no 1 pp 145ndash151 1999
[21] K Gopalsamy ldquoStability of artificial neural networks withimpulsesrdquo Applied Mathematics and Computation vol 154 no3 pp 783ndash813 2004
[22] H Zou X Lu H Jiang and L Xie ldquoA fast and precise indoorlocalization algorithm based on an online sequential extremelearning machinerdquo Sensors vol 15 no 1 pp 1804ndash1824 2015
[23] C Y J So J-Y Lee C-H Yoon and H Park ldquoAn improvedlocation estimation method for Wifi fingerprint-based indoorlocalizationrdquo International Journal of Software Engineering andIts Applications vol 7 no 3 pp 77ndash86 2013
[24] Z Farid R Nordin W M A W Daud and S Z HasanldquoLeveraging existing WLAN infrastructure for wireless indoorpositioning based on fingerprinting and clustering techniquerdquoin Proceedings of the 13th International Conference on Electron-ics Information and Communication (ICEIC rsquo14) pp 1ndash4 KotaKinabalu Malaysia January 2014
[25] InSSIDer by metageek httpwwwmetageeknet[26] J S Lee and Y M Wang ldquoExperimental evaluation of ZigBee-
based wireless networks in indoor environmentsrdquo Journal ofEngineering vol 2013 Article ID 286367 9 pages 2013
[27] S K Gharghan R Nordin and M Ismail ldquoEnergy-efficientZigBee-based wireless sensor network for track bicycle perfor-mancemonitoringrdquo Sensors vol 14 no 8 pp 15573ndash15592 2014
[28] XBeeXBee-pro RF Modules 2015 httpwwwdigicom[29] A Baniukevic C S Jensen andH Lu ldquoHybrid indoor position-
ingwithWi-Fi and bluetooth architecture and performancerdquo inProceedings of the IEEE 14th International Conference on MobileData Management (MDM rsquo13) pp 207ndash216 IEEE Milan ItalyJune 2013
[30] Z Xiong Z Song A Scalera et al ldquoHybrid WSN and RFIDindoor positioning and tracking system RFID and near fieldcommunications in embedded systemsrdquo EURASIP Journal onEmbedded Systems vol 2013 article 6 2013
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

Mobile Information Systems 11
[18] F Subhan H Hasbullah and K Ashraf ldquoKalman filter-basedhybrid indoor position estimation technique in bluetoothnetworksrdquo International Journal of Navigation and Observationvol 2013 Article ID 570964 13 pages 2013
[19] S-H Fang and T-N Lin ldquoIndoor location system based ondiscriminant-adaptive neural network in IEEE 80211 environ-mentsrdquo IEEETransactions onNeural Networks vol 19 no 11 pp1973ndash1978 2008
[20] N Qian ldquoOn the momentum term in gradient descent learningalgorithmsrdquo Neural Networks vol 12 no 1 pp 145ndash151 1999
[21] K Gopalsamy ldquoStability of artificial neural networks withimpulsesrdquo Applied Mathematics and Computation vol 154 no3 pp 783ndash813 2004
[22] H Zou X Lu H Jiang and L Xie ldquoA fast and precise indoorlocalization algorithm based on an online sequential extremelearning machinerdquo Sensors vol 15 no 1 pp 1804ndash1824 2015
[23] C Y J So J-Y Lee C-H Yoon and H Park ldquoAn improvedlocation estimation method for Wifi fingerprint-based indoorlocalizationrdquo International Journal of Software Engineering andIts Applications vol 7 no 3 pp 77ndash86 2013
[24] Z Farid R Nordin W M A W Daud and S Z HasanldquoLeveraging existing WLAN infrastructure for wireless indoorpositioning based on fingerprinting and clustering techniquerdquoin Proceedings of the 13th International Conference on Electron-ics Information and Communication (ICEIC rsquo14) pp 1ndash4 KotaKinabalu Malaysia January 2014
[25] InSSIDer by metageek httpwwwmetageeknet[26] J S Lee and Y M Wang ldquoExperimental evaluation of ZigBee-
based wireless networks in indoor environmentsrdquo Journal ofEngineering vol 2013 Article ID 286367 9 pages 2013
[27] S K Gharghan R Nordin and M Ismail ldquoEnergy-efficientZigBee-based wireless sensor network for track bicycle perfor-mancemonitoringrdquo Sensors vol 14 no 8 pp 15573ndash15592 2014
[28] XBeeXBee-pro RF Modules 2015 httpwwwdigicom[29] A Baniukevic C S Jensen andH Lu ldquoHybrid indoor position-
ingwithWi-Fi and bluetooth architecture and performancerdquo inProceedings of the IEEE 14th International Conference on MobileData Management (MDM rsquo13) pp 207ndash216 IEEE Milan ItalyJune 2013
[30] Z Xiong Z Song A Scalera et al ldquoHybrid WSN and RFIDindoor positioning and tracking system RFID and near fieldcommunications in embedded systemsrdquo EURASIP Journal onEmbedded Systems vol 2013 article 6 2013
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014