reduced order modeling of parameterized and distributed systems luca daniel, m.i.t
TRANSCRIPT

Reduced Order Modeling of Reduced Order Modeling of Parameterized and Distributed SystemsParameterized and Distributed Systems
Luca Daniel, M.I.T.

2
Parameterized Model Order ReductionParameterized Model Order Reduction
Problem Classification
Reducing Linear Systems
Moment Matching with Linear parameters
Moment Matching with NON-linear parameters
Quasi Convex Optimization approach
Reducing NON-linear systems
Moment Matching with NON-linear parameters

106
107
108
109
1010
100
101
102
103
104
frequency
|Z(f)|
Field solvers can produce instance impedance vs. frequency curves.
Motivation.Motivation. Example: Analysis of RF micro-inductor Example: Analysis of RF micro-inductor
How are the substrate eddy currents affecting the quality factor of the inductor?
How are the displacement currents affecting the resonance of the inductor?
Need to capture all 2nd order effects

“Model Order Reduction” can help verify how the inductor performance (Q, resonance position, etc) affect the transceiver performance (distortion, interference rejection etc.)
Modeling Requirements: as accurate as a field solver automatic and robust model compatible with circuit
simulators
MotivationMotivation Example: MOR of RF micro-inductor Example: MOR of RF micro-inductor
LNA
ADC
ADC
I
Q
LO

MotivationMotivation Example: Parameterized MOR of RF micro-inductor Example: Parameterized MOR of RF micro-inductor
LNA
ADC
ADC
I
Q
LOd
W
“Model Order Reduction” can help verify how the resonator or inductor performance (noise, quality factor, etc) affect the transceiver performance (distortion, interference rejection)
“Parameterized Model Order Reduction” can help verify how the transceiver performance changes when I change wire widths and wire separation

Luca Daniel15 July, 2003 6http://www.rle.mit.edu/cpgfrequency [Hz]frequency [Hz]
MotivationMotivationExample. Analysis of Integrated Power ElectronicsExample. Analysis of Integrated Power Electronics
How is the How is the magnetic fringing fieldmagnetic fringing field from the from the core effecting eddy current losses?core effecting eddy current losses?Analysis toolsAnalysis tools can produce for instance can produce for instance resistance vs. frequency curves.resistance vs. frequency curves.
Spattered laminated NiFe core, electroplated Spattered laminated NiFe core, electroplated windings [Daniel96]windings [Daniel96]
Rac

Luca Daniel15 July, 2003 7http://www.rle.mit.edu/cpg
Micro-inductor in a DC/DC power converterMicro-inductor in a DC/DC power converter
• ““Model Order Reduction”Model Order Reduction” can help verifying how the 2 can help verifying how the 2ndnd order effects order effects of the power inductor (e.g. power loss vs. freq. curve)of the power inductor (e.g. power loss vs. freq. curve) influences the influences the power converter functionality (dynamics, overall power efficiency)power converter functionality (dynamics, overall power efficiency)
• ““Parameterized Model Order Reduction”Parameterized Model Order Reduction” can help verify how the can help verify how the functionality and the efficiency of the overall power converter functionality and the efficiency of the overall power converter changeschanges when I change wire widths and wire separations?when I change wire widths and wire separations?
Vin(t)
Vout(t)

8
d
W
From Field Solvers From Field Solvers to Parameterized Model Order Reduction (PMOR).to Parameterized Model Order Reduction (PMOR).
dt
dEH
dt
dHE
1M equations
)()(),( tuBtxdt
dxdWE
10 equations
)(ˆ)(ˆˆ
),(ˆ tuBtxdt
xddWE
PMORPMOR
Field Solvers discretize Field Solvers discretize geometry and produce large geometry and produce large systemssystems
PMOR produces a dynamical model: PMOR produces a dynamical model:
– automaticallyautomatically
– match port impedance match port impedance
– small (10-15 ODEs)small (10-15 ODEs)

Parameterized model order reduction.Parameterized model order reduction.Problem classification Problem classification
)()(),...,,( 21 tuBtxdt
dxsssE p
linearity
matrix size
# parameters

10
Parameterized Model Order ReductionParameterized Model Order ReductionProblem ClassificationProblem Classification
matrix size
# parameters
linearity
Non-Linear SystemsLinear Time Invariant
linearlyparameterized
non-linearly parameterized
0,...,,,,, 21 pdt
dx sssuxE)()(),,( 1 tuBtxdt
dxssE p
)()(...2211 tuBtxdt
dxEsEsEs pp
)()(),...,,( 21 tuBtxdt
dxsssE p

11
Parameterized Model Order Reduction.Parameterized Model Order Reduction.ApplicationsApplications
interconnectRF inductors
matrix size
# parameters
linearity
linearlyparameterized
non-linearly parameterized
Linear Time Invariant Non-Linear Systems
LOLNA ADC
MEMS
Packages

12
Parameterized Model Order Reduction.Parameterized Model Order Reduction.Previous workPrevious work
interconnect
matrix size
# parametersLOLNA ADC
linearity
Linear Time Invariant
linearlyparameterized
non-linearly parameterized
Non-Linear Systems
MEMS
Packages
RF inductors
statistical data miningLiu DAC99Heydari ICCAD01
CMU Rutenbar02
Moment Matching: Pullela97, Weile99, Gunupudi00, Prud’homme02, Daniel02, Li05

13
Parameterized Model Order ReductionParameterized Model Order Reduction
Problem Classification
Reducing Linear Systems
Moment Matching with Linear parameters
Moment Matching with NON-linear parameters
Quasi Convex Optimization approach
Reducing NON-linear systemsMoment Matching with NON-linear parameters

DAC02 modeling tutorialDAC02 modeling tutorial14
Motivation for geometrically parameterized modeling of interconnect
• In interconnect design often would like:In interconnect design often would like:– reliable functionality: reliable functionality:
• minimize capacitive cross-talk, minimize capacitive cross-talk,
• minimize inductive cross-talk, minimize inductive cross-talk,
• minimize electromagnetic interference minimize electromagnetic interference
– high speed: high speed: • minimize resistance minimize resistance
• minimize capacitance minimize capacitance
– low cost: low cost: • minimize areaminimize area
• Need to explore tradeoff space and find optimal Need to explore tradeoff space and find optimal design!design!

DAC02 modeling tutorialDAC02 modeling tutorial15
The traditional design methodology
• The traditional design flow:The traditional design flow:– REPEATREPEAT
• design all interconnect wiresdesign all interconnect wires
• extract accurately parasitics all at once extract accurately parasitics all at once
– UNTIL noise and timing are within specsUNTIL noise and timing are within specs
• such procedure is not ideal for optimization!such procedure is not ideal for optimization!• each iteration is very time consumingeach iteration is very time consuming

DAC02 modeling tutorialDAC02 modeling tutorial16
Alternative design methodologies
1.1. Pre-characterize standard interconnect Pre-characterize standard interconnect structures (e.g. busses):structures (e.g. busses):– using parasitic extraction and table lookupusing parasitic extraction and table lookup– or building parameterized and accurate low order modelsor building parameterized and accurate low order models
2.2. However... if the model construction is fast However... if the model construction is fast enough can also: enough can also: – build the interconnect structure model "on the fly" during layoutbuild the interconnect structure model "on the fly" during layout – accounting for any topology in surrounding topologies already accounting for any topology in surrounding topologies already
committed to layoutcommitted to layout– then use optimizer to choose the best parameter for optimal then use optimizer to choose the best parameter for optimal
tradeoff design.tradeoff design.

We construct a multi-parameter model of the bus parameterized in wire width W and separation d
Example: an interconnect bus Example: an interconnect bus
…………..
WW dd
• accounting for surrounding topologyaccounting for surrounding topology

Parasitic extraction produces large Parasitic extraction produces large state space modelsstate space models
E.g. subdividing wires in short sections and using for instance Nodal Analysis
sidegnd
T
CsWC s WG x bu
d
y c x
…………..
Conductance matrix
Large linear dynamical systemLarge linear dynamical systemLarge linear dynamical systemLarge linear dynamical system

Our goalOur goal
• Given a large parameterized linear system:Given a large parameterized linear system:
gnd side
T
ssW W uC C G x b
d
y c x
• construct a construct a reduced order reduced order system with system with similar similar frequency frequency responseresponse
ˆˆ ˆ ˆ ˆ
ˆ ˆ
gnd side
T
ssW C C W G x b u
d
y c x

T
s uE x x b
y c x
BackgroundBackgroundNon-parameterized Model order reductionNon-parameterized Model order reduction
500,000 x 500,000500,000 x 500,000
• Given a large Given a large linear system linear system model:model:
ˆˆ ˆ ˆ
ˆ ˆT
s E x x b u
y c x
20 x 2020 x 20
• Construct a linear Construct a linear system model with:system model with:- smaller complexitysmaller complexity
- same fidelitysame fidelity
- small reduction small reduction costcost

H s
H s
Taylor series expansion:
2 xx b Ab A b
UU
BackgroundBackgroundModel order reduction (cont.)Model order reduction (cont.)
2span , , ,x b Eb E b change basis and use only the first few
vectors of the Taylor series expansion: equivalent to match first derivatives around expansion point
0
k k
k
x s E b u
sEx x bu 1x I sE bu
2b Eb E b

22
Reducing matrices’ size: Reducing matrices’ size: Congruence Transformation [PRIMA TCAD98]Congruence Transformation [PRIMA TCAD98]
nxnnxn
TqU
qxnqxn nxqnxq
qU xs x TqU bu
nxqnxq
qUx xE
Eqxqqxq
E s TqU bux x

Discretizing wires and using Nodal Analysis
sgnd
T
CsWC s WG x bu
d
y c x
…………..
1s 2s 3s
Parameterized Model Order Reduction. Parameterized Model Order Reduction. Example: interconnect busExample: interconnect bus

24
More in general...More in general...[D. TCAD04] [D. PhD04][D. TCAD04] [D. PhD04]
ubxEsWdEWE 1,1,10,2,02
0,0,0 ......
21 2 1 1 2 2 1, , , , , , ,px span b E b E b E b E b E E E E b
ˆq xx U
Uq
It is a p-variables Taylor series expansion
buEsEsEsxm
mpp 2211
Once again change basis:Once again change basis: use first few vectors of the use first few vectors of the
Taylor expansion,Taylor expansion, matching first few matching first few
derivatives with respect to derivatives with respect to each parametereach parameter

25
ubxEsWdEWE ˆˆˆ...ˆ...ˆ1,1,10,2,0
20,0,0
ubxEsWdEWE
1,1,10,2,02
0,0,0 ......
TqU
nxnnxn
qxqqxq
nxqnxq
qxnqxn
Congruence transformations on each of the matrices
kjiE ,,
kjiE ,,ˆ
qU
Parameterized moment matching Parameterized moment matching (cont.)(cont.)

Example: model step responses Example: model step responses for different W and d. for different W and d.
………….. N=16 wiresh=1.2umL=1mm
0 0.2 0.4 0.6 0.8 1
x 10-11
0
0.2
0.4
0.6
0.8
1
time [sec]
original order = 336. reduced to order = 5
d=2um
W=0.25umW=0.2umW=4umW=8um
W0=1umd0=1um
WW dd
0 0.2 0.4 0.6 0.8 1
x 10-11
0
0.2
0.4
0.6
0.8
1
time [sec]
original order = 336. reduced to order = 5
d=0.25um
W=0.25umW=0.2umW=4umW=8um
W0=1umd0 =1um

0 0.2 0.4 0.6 0.8 1
x 10-11
0
0.05
0.1
0.15
0.2
0.25
time [sec]
original order = 336. reduced to order = 5
d=2um
W=0.25umW=0.2umW=4umW=8um
W0=1umd0 =1um
Example: model crosstalk responsesExample: model crosstalk responsesfor different W and d.for different W and d.
………….. N=16 wiresh=1.2umL=1mm
0 0.2 0.4 0.6 0.8 1
x 10-11
0
0.05
0.1
0.15
0.2
0.25
time [sec]
original order = 336. reduced to order = 5
d=0.25um
W=0.25umW=0.2umW=4umW=8um
W0=1umd0 =1um
WW dd

28
Parameterized Model Order ReductionParameterized Model Order Reduction
Problem Classification
Reducing Linear Systems
Moment Matching with Linear parameters
Moment Matching with NON-linear parameters
Quasi Convex Optimization approach
Reducing NON-linear systemsMoment Matching with NON-linear parameters

linearlyparameterized
Example: RF inductorExample: RF inductorReduction of Non-linearly parameterized linear systemsReduction of Non-linearly parameterized linear systems
interconnect MEMS
RF inductorsmatrix size
# parametersLOLNA ADC
linearity
Non-Linear Systems
non-linearly parameterized
Linear Time Invariant
CMU Rutenbar02statistical data miningLiu DAC99
Heydari ICCAD01
Moment MatchingPullela97, Weile99, Prud’homme 02

Example: RF inductorExample: RF inductor
d
Wn= 3
Design parameters: wire dimensions and separations, number of turns type of substrate and distance from wires
Performance parameters: inductance quality factor Q resonance frequency power area
Effects captured: displacement currents affect resonance skin effect in wires affect Q proximity effect in wires affect Q dielectrics affect Q and resonance substrate eddy currents affect Q and resonance interference with other devices

31
Example: PEEC Mixed Potential Integral Example: PEEC Mixed Potential Integral Equation [Ruehli MTT74]Equation [Ruehli MTT74]
)()(ˆ0)( srrJnrJ j current and chargecurrent and chargeconservationconservation
AB
'|'|
)'(4
)( '
drrr
rJrJ rr
V
jkej
resistive effectresistive effect magnetic couplingmagnetic coupling
JJ
J J
J
)('|'|
)(4
1 '
SSSS
rr
s rdrrr
'rSS
S
jke charge-voltage charge-voltage relationrelation

32
PEEC Discretization Basis Functions PEEC Discretization Basis Functions [Ruehli MTT74, FastHenry94][Ruehli MTT74, FastHenry94]
PEEC subdivides the volumes into small thin filaments
'|'|
)'(4
)( '
drrr
rJrJ rr
V
jkej
k
kk Iw )(r
hhh Iw )(r'
conductor k
Enforcing this equation in each filament: produces branch equations
kV
conductor h
cccc VILjR
kR khL
-
k
k
I
V
jkhkhkk VILjIR

33
PEEC Discretization Basis Functions PEEC Discretization Basis Functions [Ruehli MTT74, FastCap91][Ruehli MTT74, FastCap91]
)('|'|
)(4
1 '
SSSS
rr
s rdrrr
'rSS
S
jkej
jj qv )(r
panel j
Enforcing this equation in each panel: produces branch equations
)( ii r
ppp qP
PEEC subdivides the surface into small panels
panel i
j
ijijqP
i
iq

34
PEEC Discretization Basis Functions PEEC Discretization Basis Functions [Ruehli MTT74, MIT course 6.336J and 16.920J][Ruehli MTT74, MIT course 6.336J and 16.920J]
PEEC discretizes volumes in short thin filaments, small surface panels
thin volume thin volume filamentsfilamentswith constant with constant currentcurrent
small surface small surface panelspanelswith constant with constant chargecharge
• PEEC discretization gives branch equations:PEEC discretization gives branch equations:
p
c
p
c
p
cc V
q
I
P
LjR
)(0
0)( cccc VILjR )(

35
PEEC Discretization Example: PEEC Discretization Example: On-Chip RF Inductor [D. BMAS03]On-Chip RF Inductor [D. BMAS03]
x100um
x100um
wire separation d = 1um-5umwire width W = 1um-5um
overall dimensions = 600um x 600umwire thickness 1um
picture not to scale
W
d

36
Mesh (Loop) Analysis Mesh (Loop) Analysis [FastHenry94, Kamon Trans Packaging98][FastHenry94, Kamon Trans Packaging98]
Imposing current Imposing current conservation with conservation with mesh (loop) analysis mesh (loop) analysis (KVL)(KVL)
msb VMV msbp
cc
VIj
PLjR
M
0
0
msmT
p
cc
VIMj
PLjR
M
0
0

37
Example of Field Solver output: Example of Field Solver output: current distributions on a package power gridcurrent distributions on a package power grid
input terminals

38
Example of a Field Solver output: Example of a Field Solver output: package powergrid admittance amplitudepackage powergrid admittance amplitude
* 3 proximity templates per cross-section- 20 non-uniform thin filaments per cross-section

39
From Field Solvers From Field Solvers to a Dynamical Linear System Modelto a Dynamical Linear System Model
msmTp
Tc
p
cc
pc VIM
M
j
PLjR
MM
0
0 msmT
p
Tc
p
cc
pc VIM
M
s
PLsR
MM
0
0
Multiply out and introduce state
p
mIx
Imposing current Imposing current conservation with conservation with mesh (loop) analysis mesh (loop) analysis (KVL)(KVL)

40
Discretization produces a HUGE “nonlinearly Discretization produces a HUGE “nonlinearly parameterized” dynamical linear system [D. BMAS03]parameterized” dynamical linear system [D. BMAS03]
thin volume filamentsthin volume filamentswith constant currentwith constant current
small surface panelssmall surface panelswith constant chargewith constant charge
uV
xM
MMRMx
P
MLMs ms
Tp
pTccc
p
Tccc
000
01
E ACase 2Laplace parameter(frequency)
Case 1geometricalparameters
(W,d,s) (W,d,s)

A polynomial interpolation approach [D. et al BMAS03]A polynomial interpolation approach [D. et al BMAS03]
1. Fit a low order polynomial (e.g. quadratic) to the evaluated matrices R and L
A(W,d) ≈ A0,0+ WA1,0 + d A0,1 + W2A2,0 + Wd A1,1 + d2 A0,2
E(W,d) ≈ E0,0+ WE1,0 + d E0,1 + W2E2,0 + Wd E1,1 + d2 E0,2
[A0,0+ WA1,0 + d A0,1 + W2A2,0 + Wd A1,1 + d2 A0,2 +...
sE0,0+ sWE1,0 + sd E0,1 + sW2E2,0 + sWd E1,1 + sd2 E0,2 ] x= b u
[ s E (W,d)- A(W,d) ] x= b u

A polynomial interpolation approach [D. et al BMAS03]A polynomial interpolation approach [D. et al BMAS03]
2. Selected a grid of 9 evaluation points for different combination of parameters
(W,d) = (1um,1um), (1um,3um), (1um,5um),(3um,1um), (3um,3um), (3um,5um),(5um,1um), (5um,3um), (5um,5um)
3. Used the Volume Integral Equation code to generate system matrices Ek = E(Wk ,dk) and A k = A (Wk ,dk) for each combination of parameters
Ek Ak
buxP
MLMs
M
MMRM Tfff
Tp
pTfff
10
0
0

A polynomial interpolation approach [D. et al BMAS03] A polynomial interpolation approach [D. et al BMAS03] 4. Calculating Interpolation coefficients4. Calculating Interpolation coefficients
Need to calculate 6 polynomial coefficients
Hence need at least 6 equations imposing fit in 6 evaluation points
However in general it is better to use more evaluation points than the minimum.
For instance here we used the 9 evaluation points above and solved with a least square method
ji
ji
ji
ji
ji
ji
ji
ji
ji
ji
ji
ji
ji
ji,
ji,
ddWWdW
ddWWdW
ddWWdW
ddWWdW
ddWWdW
ddWWdW
ddWWdW
ddWWdW
ddWWdW
,9
,8
,7
,6
,5
,4
,3
,2
,1
,2,0
,1,1
,0,2
,1,0
,01
,00
2999
2999
2888
2888
2777
2777
2666
2666
2555
2555
2444
2444
2333
2333
2222
2222
2111
2111
1
1
1
1
1
1
1
1
1
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
A polynomial interpolation approach [D. et al BMAS03] A polynomial interpolation approach [D. et al BMAS03] (cont.)(cont.)
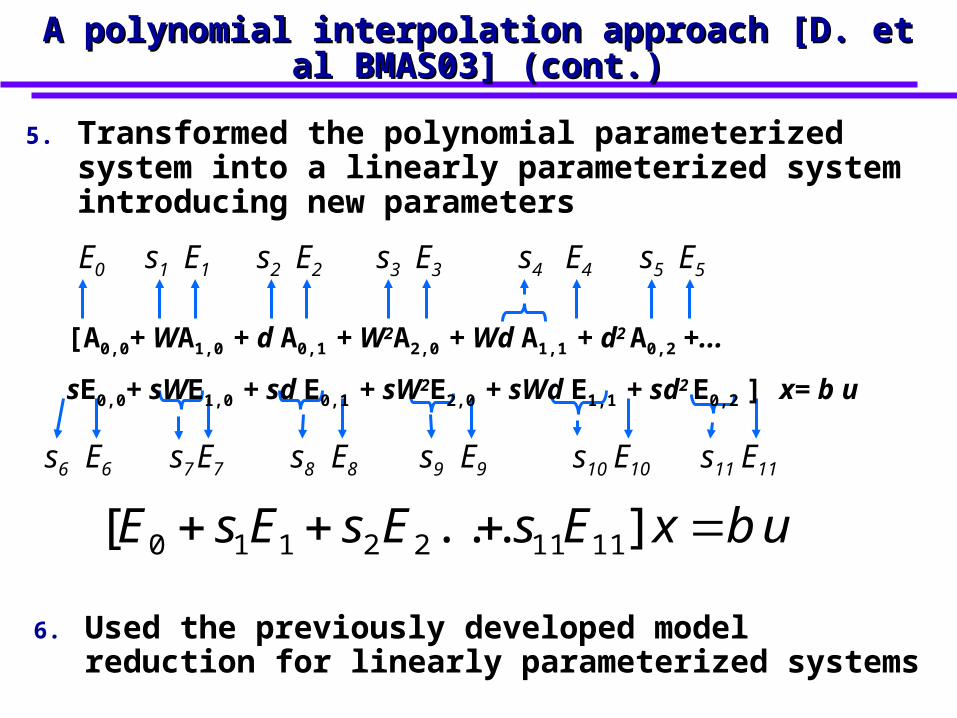
6. Used the previously developed model reduction for linearly parameterized systems
5. Transformed the polynomial parameterized system into a linearly parameterized system introducing new parameters
E0 E1 E2 E3 E4 E5
E11E10E9E8E7E6
s1 s2 s3 s4 s5
s11s10s9s8s7s6
[A0,0+ WA1,0 + d A0,1 + W2A2,0 + Wd A1,1 + d2 A0,2 +...
sE0,0+ sWE1,0 + sd E0,1 + sW2E2,0 + sWd E1,1 + sd2 E0,2 ] x= b u
ubxEsEsEsE ]...[ 111122110

45
More in general...More in general...[D. TCAD04] [D. PhD04][D. TCAD04] [D. PhD04]
ubxEsWdEWE 1,1,10,2,02
0,0,0 ......
21 2 1 1 2 2 1, , , , , , ,px span b E b E b E b E b E E E E b
ˆq xx U
Uq
It is a p-variables Taylor series expansion
buEsEsEsxm
mpp 2211
Once again change basis:Once again change basis: use first few vectors of the use first few vectors of the
Taylor expansion,Taylor expansion, matching first few matching first few
derivatives with respect to derivatives with respect to each parametereach parameter

46
Computational Complexity (time and memory)Computational Complexity (time and memory)
bEEbbUq2
Computational Complexity
Hankel reductionor Balance Realizations
O(N3)e.g. 10months for N=100,000
Moment matching O(q N2) e.g. 8days for N=100,000 q=10
Moment Matching + pFFT O(q N log N)e.g. 8hours for N=100,000 q=10
Moment matching bottleneck:
getting Eb, E2b, ...

47
pFFT: an O(NlogN) Matrix-Vector productpFFT: an O(NlogN) Matrix-Vector productfor the Mixed Potential Integral equations [Phillips97]for the Mixed Potential Integral equations [Phillips97]
Matrix-vector product Eb physical interpretation:
(1(1)) (2)(2)
(3)(3)
Picture by J. Phillips
(1) Project charges into a 3D grid. Complexity O(N)
(2) Calculate grid potentials, it is a convolution use FFT. Complexity O(n log n).
(3) Interpolate potentials from grid. Complexity O(N)
given N charges on N panels calculate the resulting N
potentials
grid points n ≈ N panels

48
PEEC Discretization Example: PEEC Discretization Example: On-Chip RF Inductor [D. BMAS03]On-Chip RF Inductor [D. BMAS03]
x100um
x100um
wire separation d = 1um-5umwire width W = 1um-5um
overall dimensions = 600um x 600umwire thickness 1um
picture not to scale
W
d

Results: Inductance vs. frequencyResults: Inductance vs. frequency
frequency [ x10GHz ]
Wire width = 5umseparation = 1um, 2um, 3um, 4um, 5um
frequency [ x10GHz ]
Wire width = 1umseparation = 1um, 2um, 3um, 4um, 5um
L L__ original system (order 420)--- reduced model (order 12)
__ original system (order 420)--- reduced model (order 12)
Worst case errorin resonance position = 3%

Results: Quality factor (Q=wL/R) vs. frequencyResults: Quality factor (Q=wL/R) vs. frequency
Wire width = 1umseparation = 1um, 2um, 3um, 4um, 5um
Wire width = 5umseparation = 1um, 2um, 3um, 4um, 5um
frequency [ x10GHz ]frequency [ x10GHz ]
Worst case errorin amplitude = 4%
__ original system (order 420)--- reduced model (order 12)
__ original system (order 420)--- reduced model (order 12)
Q Q

51
Open issues Open issues in the PMOR Matrix Reduction stepin the PMOR Matrix Reduction step
Model order grows as O(pm) where p = # parameters and m = # derivatives matched for each parameter however model order is linear in # of parameters when
matching only one derivative per parameter (m = 1) and still produces good accuracy in our experiments.
furthermore, for higher accuracy instead of increasing # of matched derivatives, can instead match multiple points (or combine the two approaches) [Li, Liu, Nassif, Pileggi DATE05]
W or d

Limitations and future workLimitations and future workuse better interpolation!use better interpolation!
Wire width = 1umseparation = 1um, 2um, 3um, 4um, 5um
frequency [ x10GHz ]
__ original system (order 420)--- reduced model (order 12)
Q
very little error in thepoints used for fitting1um, 3um, 5um
Worst case errors far from fitting points 2um, 4um (3% in resonance position)
so the critical stepis the fitting!!

Case #2. The parameter is frequency.Case #2. The parameter is frequency.Already discussed: Distributed Linear Systems Already discussed: Distributed Linear Systems
Examples: full-wave MPIE MPIE using layered-media Green functions (e.g. for
handling substrate or dielectrics) frequency-dependent basis functions frequency dependent discretizations
xcy
buxsssET
p
),,,( 1

Polinomial interpolation for frequency Polinomial interpolation for frequency [Phillips96][Phillips96]
Polynomial approximation e.g. Taylor expansion, or a polynomial interpolation for E(s)
Performance: Fast and accurate in the frequency band of interest
Problem: Can not be used in a time domain circuit simulator because does not guarantee stability and passivity
buxEsEssEE MM 2
210
xcybuxsE T)(

Positive real transfer functionPositive real transfer functionin the complex plane for different frequenciesin the complex plane for different frequencies
)}(Re{ jH
sfrequencie allfor ,0)}(Re{ jHPassive regionActive
region
)}(Im{ jH
original system )( jH

Why does polynomial interpolation failWhy does polynomial interpolation failwhen applied to the Laplace parameter ‘s’?when applied to the Laplace parameter ‘s’?
original system )( jH
)}(Im{ jH
Passive regionActiveregion
Although accurate in the frequency band of interest
Polynomial interpolation is unlikely to preserve GLOBAL properties such as positive realness because it is GLOBALLY not well-behaved
)}(Re{ jH
sfrequencie allfor ,0)}(Re{ jH

Using global uniformly convergent interpolantsUsing global uniformly convergent interpolants[Daniel02][Daniel02]
If E(s) is strictly positive real, a GLOBALLY and UNIFORMLY convergent interpolant will eventually get close enough (for a large enough order M of the interpolant) and be positive-real as well.
Re
Imoriginal system )( jE
reduced system )(ˆ jE
Proof: just choose
accuracy of interpolation smaller than minimum distance from imaginary axis
M
kkk
M sEsE0
)( )()(
sfrequencie allfor ,0)}(Re{ jEPassive regionActive
region

Parameterized reduction can enable automatic design of circuit components that can only be described by field solvers
All methods presented are based on Krylov subspace moment matching projection
Key observation: all these methods are compatible with O(NlogN) field solver based matrix-vector
But of course all these methods also have all the arguable issues associated with moment matching
Linearly parameterized (use p-variable Taylor series expansion e.g. interconnect bus
Non-linearly parameterized (use polynomial interpolation) e.g. RF inductor (no substrate)
Distributed systems i.e. non-linear in s (use globally convergent interpolant implemented with FFT) e.g. substrate layered green functions or high order basis
functions
ConclusionsConclusions

59
Parameterized Model Order ReductionParameterized Model Order Reduction
Problem Classification
Reducing Linear Systems
Moment Matching with Linear parameters
Moment Matching with NON-linear parametersExample utilization of PMOR
Quasi Convex Optimization approach
Reducing NON-linear systemsMoment Matching with NON-linear parameters

Accelerated Optical Topography Using
Parameterized Model Order Reduction
Junghoon Lee, Dimitry Vasilyev, Anne Vithayathil, Luca Daniel, and Jacob White
Research Laboratory of Electronics
Massachusetts Institute of Technology
http://www.rle.mit.edu/cpg
TH3D-3

Non-destructive Inspection of Fabricated Structures• Spectroscopic ellipsometry
– Shine light of =200~800nm– Measure the scattered light– Estimate the geometric parameters, e.g. w and h
plasma-processing.com/insitu.htm www.sopra-sa.com
etched structure scattered field measurements

Model Based Approach
• Determine parameters p by solving
• Solve nonlinear least squares problem– Algorithms are iterative in nature– Scattering model evaluated for many p’s
• Need an efficient model of parameters p– Up to a dozen parameters– width (w), height (h), left/right sidewall angle, top
curvature, etc.

Model Possibilities
• Tabulated library of scattered fields
– Table grows exponentially as the number of parameters grow
• Full EM simulation for scattered field
– Too computationally expensive (too slow)
• New approach: automatic extraction of parameterized low-order model
– Automatically extract parameterized low-order model from pre-determined test structures
– Use model in optimization during in-line process diagnosis

Surface Integral Formulation
• Discretized surface integral formulation– PMCHW formulation on dielectric interfaces– Discretization and RWG basis functions– Method of moments
• Resulting system of equations
scattered field
integral ofincident wave
weights for RWG basis
discretizedintegral operators

• Polynomial fitting to find explicit dependency– y(p;): rough function of p and – A(p;), C(p;): smooth function of p and
• Polynomial fit of A and C
• Accurate since they are smooth
Polynomial Fitting
coefficient matrices

Parameterized Moment Matching
• Projection representation: approximate xf as
• Many different ways to choose V– Moment matching, balanced realization, POD, etc.– We used moment matching: match Taylor
coefficients of yf(p;) and yi(p;)

Parameterized Moment Matching
• Fitting with moment matching: for the constant
term
• Overall reduced system

Accelerated Optimization with Reduced Model
err
or
radius
original: 576
reduced: 30
(about x8000 faster)
err
or
width
True: 97 nm
Predicted: 97.3 nm
original: 540
reduced: 50
(about x1000 faster)
True: 105 nm
Predicted: 104.9 nm

Conclusions
• Optical Inspection Problem:
– Parameterized reduced model using polynomial fitting plus projection
– Accelerates optimization– The method achieves good accuracy in practice
• Acknowledgements
MARCO designated Interconnect Focus Centers,
SRC, Singapore-MIT Alliance, and NSF

70
Parameterized Model Order ReductionParameterized Model Order Reduction
Problem Classification
Reducing Linear Systems
Moment Matching with Linear parameters
Moment Matching with NON-linear parameters
Quasi Convex Optimization approach
Reducing NON-linear systemsMoment Matching with NON-linear parameters

A Quasi-Convex Optimization Approach to Parameterized Model Order Reduction
Linear analog componentse.g. interconnect, packages, RF inductors
Field Solver Linear Models
Parameterized Reduced Linear Models),(
),(),(),(reduced pea
pejcpebpH
j
jj
)()()( tuBtxpAdt
dx

Review: Quasi-Convex setupfor NON-parameterized MOR
, ,
( )minimize ( )
( )
deg , deg
deg ,subject to
0, [0, ]
0, [0, ]
j j
jja b c
j
j
b e jc eH e
a e
a m b m
c m
a e
b e
convex setStability:
Passivity:
quasi-convex set
Standard problem.Use for example by the ellipsoid algorithm

Parameterized MOR setup
• Let design parameter p explicitly enter (a,b,c)
1 11 0
1 11 0
111
,
,
,
m m m mm m
m m m mm m
m mmj
p p p pa a z a z z a z z a
b b z b z z b z z b
c c z c z z
p p
c z z
p p
p p p
• More difficult to check stability
• Construct guaranteed stable parameterized reduced model

Parameterized stability• Need to check a(z,p) > 0 for all z, for all p• Cannot use the trick in the non-parameterized case• Make a(z,p) a multivariate trigonometric polynomial
• Check positivity of multivariate trigonometric polynomial by using sum-of-squares argument
ˆ, , ,p pa z p a z p z a z z
trig poly ordinary poly trig poly trig polys
11 12 4p p pp z p p p p z z with

Positivity of multivariate trig. polyGiven a(z,p), solving the semi-definite program
,min
subject to W ,
0
y W W
p
y
y a z z
W
*, W W 0pa z z y
• Otherwise, claim a(z,p) 0 at some point
• If feasible and y* < 0, then

Example 7: Parameterized RF inductor
• Construct reduced order models in the design space
2 4 6 8 10 12 14 16 18 20
2
4
6
8
10
12
14
16
18
20
W (m)
D ( m
)
• Identify dominant poles z*(p)of each ROM
• Construct “non-dominant” systems such that
2 1
* *
( )ˆ ( , ) ( ) ( , )( ) ( )
K pG z p z A p z G z p
z z p z z p
where K(p), A(p) are scalars functionsG1(z,p) is the “non-dominant” system
• Construct parameterized ROM of each “non-dominant” system• Interpolate the scalars functions
• Combine both parameterized models to obtain the final model
Circle: training pointsTriangle: test points

Example 6: Parameterized RF inductor
2 4 6 8 10 12 14 16 18 20
2
4
6
8
10
12
14
16
18
20
W (m)
D ( m
)
Circle: training points
0 2 4 6 8 10 12
x 109
-5
0
5
10
15
20
25
30
35
40
frequency (Hz)
qual
ity f
acto
r
Quality factor for W=16.5 µm,D = 1,5,18,20 µm
Triangle: test points----- full model___ our QCO PMOR

Parameterized RF inductor (cont.)
0 2 4 6 8 10 12
x 109
-5
0
5
10
15
20
25
30
35
40
frequency (Hz)
qual
ity f
acto
r
0 2 4 6 8 10 12 14 16 18 202.5
3
3.5
4
4.5
5
5.5
6
6.5x 10
9
D ( m)
argm
ax(Q
) (H
z)
Quality factor for W=16.5 µm, D = 1,5,18,20 µm
Frequency of the peak Q factor for W = 16.5 µm

Summary of Quasi-Convex Optimization basedParameterized Model Order Reduction
• QCO competes reasonably well with existing alg (e.g. PRIMA) for reducing large systems
• But in addition: QCO can reduce models with frequency dependent matrices
• QCO is very flexible in imposing constraints such as stability and passivity
• QCO can be extended to parameterized MOR problems
80
Parameterized Model Order ReductionParameterized Model Order Reduction
Problem Classification
Reducing Linear Systems
Moment Matching with Linear parameters
Moment Matching with NON-linear parameters
Quasi Convex Optimization approach
Reducing NON-linear systemsMoment Matching with NON-linear parameters

81
““Field Solver Accurate” and AutomaticField Solver Accurate” and AutomaticParameterized Reduced Order Modeling Parameterized Reduced Order Modeling
of NonLinear Analog and MEMs of NonLinear Analog and MEMs ComponentsComponents
Luca Daniel, [email protected]
with contributions from Brad Bond
www.rle.mit.edu

82
Parameterized Model Order Reduction.Parameterized Model Order Reduction.ApplicationsApplications
interconnectRF inductors
matrix size
# parameters
linearity
linearlyparameterized
non-linearly parameterized
Linear Time Invariant Non-Linear Systems
LOLNA ADC
MEMS
Packages

83
Case 3. Reduction of NonLinear SystemsCase 3. Reduction of NonLinear Systems
Non-Linear analog components
e.g. MEMs, VCO, LNA
)()),(( tuBptxFdt
dx
)(ˆ)),(ˆ(ˆˆtuBptxF
dt
xd
Parameterized NonLinear ReductionParameterized NonLinear Reduction
PDE Field Solvers or Circuit SimulatorsPDE Field Solvers or Circuit Simulators

Parameterized Model Order Reduction.Linear Systems
Moment Matching approaches - (Pullela97, Gunupudi00, Prud’homme02, Daniel02, Li05)
-Can handle nonlinear dependence on parameter
-Can handle extremely large systems
Optimization based approaches - (Sou05)
-Good for fitting data from measurements
-Cannot construct large order reduced models
Statistical Data Mining - (Liu02)
-Can handle nonlinear parameter dependence and nonlinear systems
-Does not work well for extremely large systems
Truncated Balance Realizations - (Heydari01, Phillips04)
- Does not handle extremely large systems

Previous work on Non-ParameterizedMOR for nonlinear systems
Representation of FRepresentation of F(x)(x) using using a polynomiala polynomial (e.g. Taylor’s (e.g. Taylor’s expansions, Volterra Series) [Phillips00]*****expansions, Volterra Series) [Phillips00]*****
Representation of F(x) using Representation of F(x) using several linearizationsseveral linearizations (Trajectory Piece-Wise Linear TPWL) [Rewienski01](Trajectory Piece-Wise Linear TPWL) [Rewienski01]
...)()(
)()(
00
00
xxxxW
xxAxFxF
...
)()()(
)()()(
22222
11111
xxAxFxw
xxAxFxwxF
)())(( tbutxFdt
dxE
Representation of F(x) with Representation of F(x) with several polynomialsseveral polynomials (PWP (PWP PieceWise Polynomial) [Dong03]PieceWise Polynomial) [Dong03]

k
iiii tbuKtxAxw
dt
dxE
1
)()( 00 tbuKtxAdt
dxE
x3x1
x7x6x5
Use collection of linear models
Background – TPWL [Reiwenski01]
x1
x2
x10x8
x4
x2
x14
x15
13J
xa
xb
x0
0J
bJ
aJ
x11x9
3J2J1J
4J 5J6J 7J
8J 9J 10J 11J x13
14J
15J#linearizations =#samples#linearizations =#samplesnn
n = 10n = 1044 #samples = 100#samples = 100
1001001000010000 = LARGE = LARGE
Model i only valid near xi

Background – TPWL: Picking Linearization Points
x1
x2
t
y(t)
Use training trajectories to pick linearization points
Error
Linearization at current state xi
State SpaceTime Domain Simulation

Background – TPWL: Weighting / Simulation[Riewinski01,Tiwary05,Dong05]
Use weighting functions to combine linear models during simulation
x1
x2
tbuKtxAwKtxAwKtxAwdt
dxE 333222111
tbuKtxAKtxAKtxAdt
dxE 332211 001
tbuKtxAKtxAKtxAdt
dxE 332211 05.05.0
tbuKtxAKtxAKtxAdt
dxE 332211 3.06.01.0
0tt
1tt 2tt
3tt
tbuKtxAKtxAKtxAdt
dxE 332211 9.01.00
Current state
Linearization 3
Linearization 2
Linearization 1
C – poorlyapproximated
also wellapproximated Well approximated

89
Background – TPWLBackground – TPWLReduction of the Linearized SystemsReduction of the Linearized Systems
dt
dxE tbu
Model from linearization 1
A1A1 K1K1x1w 2w kw
Model from linearization 2
A2A2 K2K2x
Model from linearization k
AkAk KkKkx
dt
xdE
ˆˆ1A 2A kA
1K 2KkK
tub x x x1w2w kw
=UTU
iA iA

90
Background – TPWLBackground – TPWLConstructing the projection matrix VConstructing the projection matrix V
Use moments from EACH linear model to construct V
bMbMbMbMbMbspanx qk
q ,,,,,,, 212
11
bMbMbMbMbU qk
q ~~~~~ 1211
=UTU
iA iA

Outline
• Introduction• Background
• NonLinear Parameterized Model Order Reduction (NLPMOR)– Constructing the system– How to pick linearization points– How to construct V
• Examples• Results• Conclusions• Future Work

NLPMOR – Constructing the System
Start with system possessing nonlinear dependence on state x and parameters sj
tbusstxFdt
dxE ,...,, 1
p
jjj tbutxFs
dt
dxE
0
~~
k
i
p
jijijji tbuKtxAsxw
dt
dxE
1 0
~~~
Obtain Linear dependence on new parameters
Linearize to get weighted sum of
linear models
By linear approximation, polynomial fitting to data points…
Single linear model
Weighting basis functions
js~
1~0 s

Non-Linear Parameterized Reduction[Bond, Daniel ICCAD05]
x1
x2
time
y(t)
Use training trajectories to pick linearization points
s1
s2
1s
2sTrain again at different points in parameter space
Parameter Space
Repeat at different points in parameter space to populate state space
State Space

Non-Linear Parameterized Reduction[Bond, Daniel ICCAD05]
1s
2s
4s
5s 3s
Populate relevant regions of state-space with linear models from training at different inputs or different points in parameter-space
Parameter Space
s2
s1
x1
x2
State Space

NLPMOR – Constructing V: 2 Options
,~
,~
,~
,,~
,~
,~
,~
,~
,,~
,~
,~
,~
,~
,,~
,~
,~
01102010
220212120222022221220
11011111012
10111111101
kkkkkkkkkpkkkk
p
p
bMMMMbMbMbMbM
bMMMMbMbMbMbM
bMMMMbMbMbMbMb
spanx
ijiij AAM~~ 1
0
kqk
q bMbMbMbMbMbspanx~
,,~
,~
,,~
,~
,~
221112
1111
EAsMp
jijji
1
0
~~
Single variable Taylor series expansion of x for each model, as in TPWL
p-variable Taylor series expansion of x as in PMOR, but for each model
OR
V
V
“PMOR V”
“MOR V”
Option 1
Option 2
bAsb ij
p
jji
1
0
~~~
EAM ii1
00
~ bAb ii1
0
~~

96
Non-Linear Parameterized ReductionConstructing V
For qth order model with p parameters and k linear models, total number of vectors for V is O(kpm)
Keeping all vectors would results in a huge “reduced” model
Hence we perform an SVD on V and keep only the q most important vectors
SVD
NN
O(kpm) q
V V

NLPMOR – 4 Algorithms
p
jjj tbutxFs
dt
dxE
0
~~
k
i
p
jijijji tbuKtxAsxw
dt
dxE
1 0
~~~ tbusstxFdt
dxE ,...,, 1
Train at single p-space point
Train at multiple p-space points
k
i
p
jijijji tubKtxAsxw
dt
xdE
1 0
ˆ~ˆ
~~ˆˆˆˆ
Linearize in parameters sj
Original Model
Train to pick linearization points xi
MOR
V
PMOR
V
MOR
V
PMOR
V
Parameter Space
x xV x xVMOR
PMOR
TPWL ALG1 ALG2 ALG3
Single p-space point training
Multiple p-space point training
MOR V
PMOR V
TPWL ALG2
ALG1 ALG3

Outline
• Introduction• Background• NLPMOR
• Examples–Circuit–Beam
• Results• Conclusions• Future Work

Analog Circuit Example
Nonlinear terms
Analog circuit with nonlinear components distributed throughoutUsing constitutive relations for each element, apply KCL at each node to obtain state-space model
cidt
dVC
1exp
Tdd v
VIVi
r
Vir
Picture by Michał Rewienski

Analog Circuit Example – State Space System
tbutxDtGxdt
tdxE
State-Space System
11
11
11 jjjj xxxx
djjjjj eeIxx
rxx
rdt
dxC
Resistor values
Turn on voltageSaturation currentCapacitor values
Possible parameters
Single equation at node j

Analog Circuit Example – One possible parameterized model
tbuKxAKxAwdt
dxE
k
iiiiii
11100
Selected parameter: α Obtained linear dependence on parameters
Time (s)
Vo
ltag
e (V
)
Full Model
ALG1 ROM
0 002.1
Training point
Evaluation point
Single point training
Multiple point training
MOR V
PMOR V
ALG1

Micromachined Switch Example
t
pzppzK
t
zhwdypp
z
wv
x
zhwS
x
zwhEI
w
a
1261
2
3
2
2
0
02
20
2
2
04
43
0
Governing Equations
DiscretizePicture by Michał Rewienski

Micromachined Switch ExampleState Space System
State-Space System
3331
1131
323
2
0
041
43
021
2
0
0
30
31
31
222
31
21
6112
1
3
2
33
3
2
3
xxxxxx
xx
dt
dx
vhx
xwhEI
x
xhwSdypx
hw
x
x
x
dt
dx
x
x
dt
dx
w
a
Beam width
Material Properties
Beam height
Possible Parameters

Micromachined Switch ExampleOne possible parameterized model
)(11001 3
2
1
3
2
13
2
1
tbuKAKAwdt
d
ixxx
iixxx
i
k
ii
xxx
u(t) = 5.52 , t > 0 Full Model
ALG2 ROM
01 072.0
Training point
Evaluation point
02
Single training
Multiple training
MOR V
PMOR V
ALG2
System parameterized inw
1

Outline
• Introduction• Background• NLPMOR• Examples
• Results–Algorithm Comparison–Algorithm Cost
• Conclusions• Future Work

Analog Circuit Example – Algorithm 1
dI
R
1
1
0.9
1.4
1e-10 1.5e-100.5e-10
Full Model
ALG1 ROM
- Training points
- Evaluation points
Single training
Multiple training
MOR V
PMOR V
ALG1

Results – Benefit of PMOR V
Id0
Accuracy
Id
TPWL – MOR V
ALG1 – PMOR V
Trained at Id0
Single p-space point training
Multiple p-space point training
MOR V
PMOR V
TPWL
ALG1
Err
or
TPWL
ALG1
IdId0
Analog Circuit
Analog Circuit TPWL ROM
ALG1 ROM

Analog Circuit Example
dI
R
1
1
0.5
1.5
1e-10 1.5e-100.5e-10
This model is parameterized in Id and 1/R, and was created using ALG2
2
2e-10
- Training points
- Evaluation points
Full Model
ALG2 ROM
Single training
Multiple training
MOR V
PMOR V
ALG2

Results – Benefit of multiple training points in p-space
Single p-space point training
Multiple p-space point training
MOR V
PMOR V
TPWL ALG2
Id0
Accuracy
Id
TPWL – trained at Id0
ALG2 – trained at Id1, Id2
Id2Id1
Id1 Id2Id0
% E
rror
TPWL
ALG2
% E
rror
time (s)
MEMs Switch
TPWL ROM
ALG2 ROM
Analog Circuit

Results – Algorithm Comparisons
Each algorithm covers a different region of p-space
Parameter Space Validity of Models
S1
S2
s2A
s1A s1B
s2B
All algorithms produce model with same reduced order and same number of linear pieces
Single p-space point training
Multiple p-space point training
MOR V
PMOR V
TPWL ALG2
ALG1 ALG3

Results – Algorithm Comparisons
Each algorithm has a different cost
AlgorithmCost of
constructing V(in system solves)
Training cost(trajectories made
per input)
TPWL
ALG 1
ALG 2
ALG 3
O(km)
O(kpm)
O(krpm)
O(krppm)
1
rp
rp
1
Majority of cost lies in training
Majority of cost lies in making vectors for V
Expensive in both training and creating V
Cheap
p - # of parameters k - # of linear models per trajectoryr - # of parameter values usedm - # of moments matched per parameter
Single point training
Multiple point training
MOR V
PMOR V
TPWL ALG2
ALG1 ALG3

Conclusions
• NLPMOR– Captures nonlinear effects
– Preserves parameter dependence
• Algorithm choice is situation/system dependent– TPWL, ALG1 can provide high accuracy locally in
parameter space
– ALG2, ALG3 can provide global accuracy in parameter space
– ALG1, ALG3 : expensive to create V
– ALG2, ALG3 : expensive to train
Single point training
Multiple point training
MOR V
PMOR V
TPWL ALG2
ALG1 ALG3

Future Work in Parameterized Model Order Reduction of Non-Linear Systems
• Ensure stability and passivity of Non-Linear reduced order models
• Try other approaches for Projection Matrix – e.g. TBR, Quasi-Convex Optimization
• Try other approaches for capturing nonlinearity– e.g. Volterra series, or piece-wise polynomial

Summary of the courseSummary of the course
Model Order Reduction of Linear SystemsKrylov + TBR two step procedure
1st step: Krylov Moment Matching Projection PVL or PRIMA (for passive systems)
2nd step Truncated Balance Realization (TBR) or Passive-TRBDistributed Passive Systems:
Quasi Convex OptimizationLaguerre interpolation
Model Order Reduction of NonLinear SystemsWeakly Nonlinear: use Volterra series + moment matchingStrongly Nonlinear: use TPWL + moment matching (and/or TBR)
Parameterized Model Order Reduction Linear: moment matching OR quasi-convex optimization NonLinear: TWPL + moment matching