tsks05 kommunikationssystem cdio 12 hp€¦ · tsks05 kommunikationssystem cdio 12 hp danyo danev...
TRANSCRIPT
TSKS05 Kommunikationssystem CDIO
12 hp
Danyo Danev
Kommunikationssystem
Institutionen för Systemteknik
Linköpings universitet
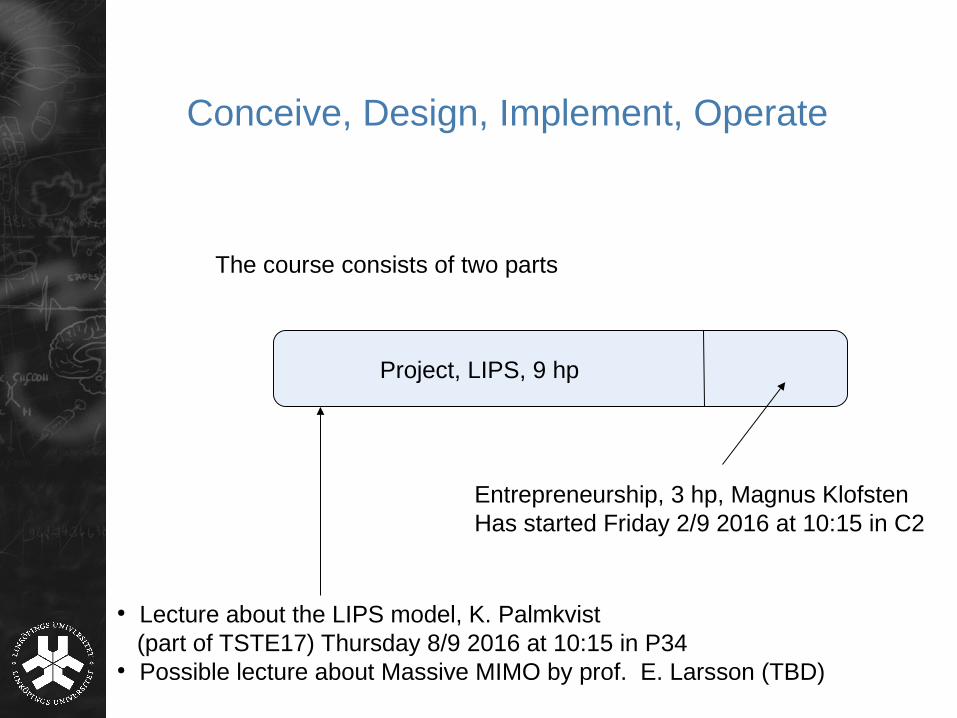
Conceive, Design, Implement, Operate
The course consists of two parts
Project, LIPS, 9 hp
Entrepreneurship, 3 hp, Magnus KlofstenHas started Friday 2/9 2016 at 10:15 in C2
● Lecture about the LIPS model, K. Palmkvist (part of TSTE17) Thursday 8/9 2016 at 10:15 in P34● Possible lecture about Massive MIMO by prof. E. Larsson (TBD)
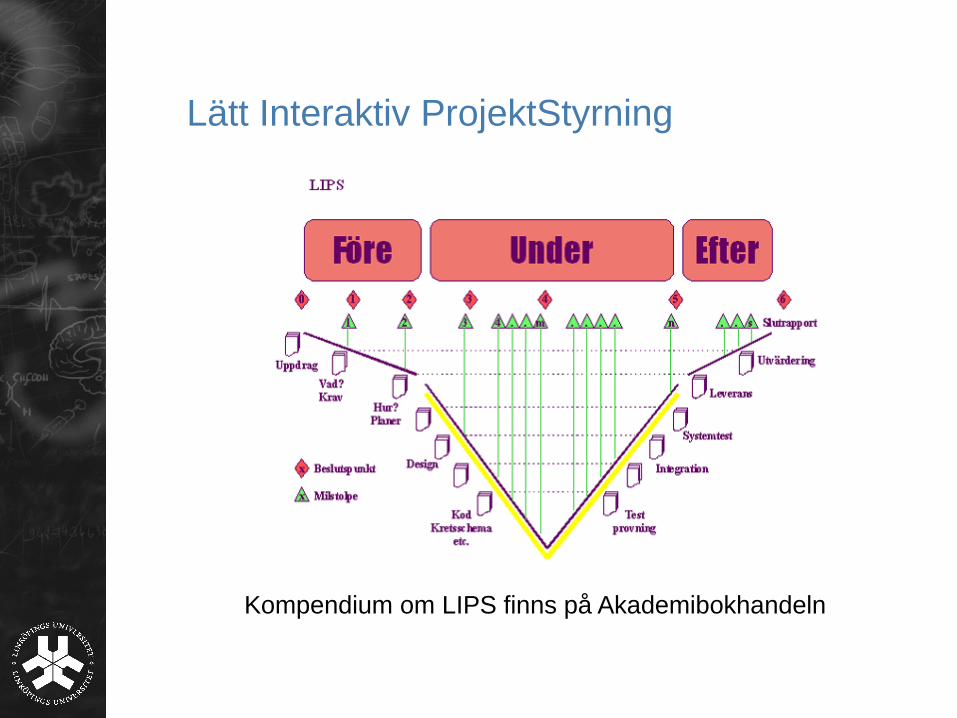
Lätt Interaktiv ProjektStyrning
Kompendium om LIPS finns på Akademibokhandeln
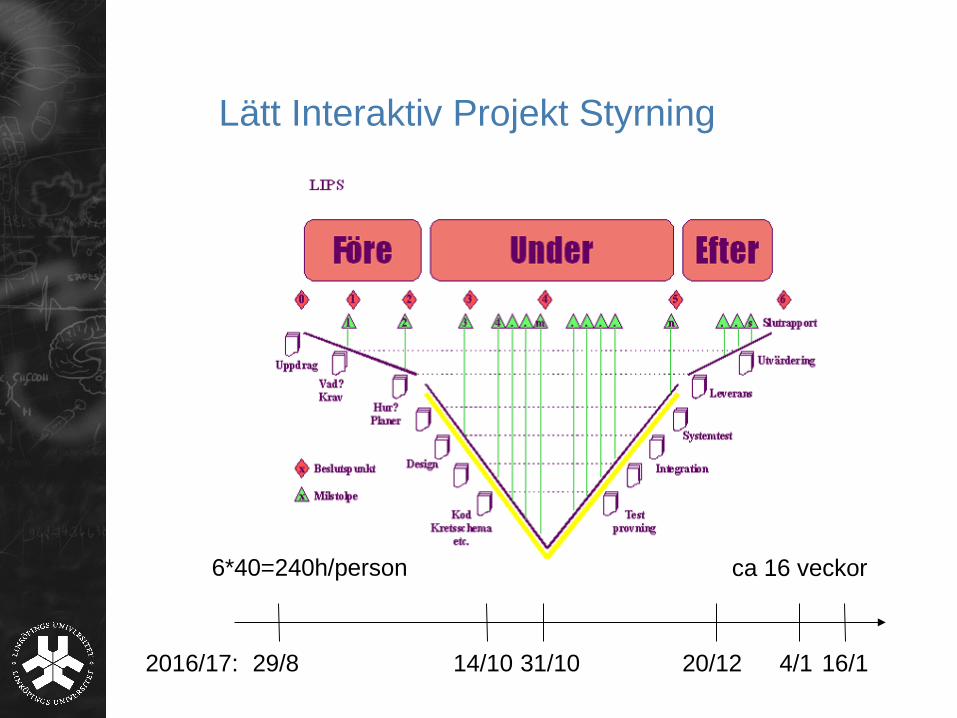
Lätt Interaktiv Projekt Styrning
6*40=240h/person ca 16 veckor
29/8 14/10 31/10 20/12 4/12016/17: 16/1
Organization at ISY
Get help from the supervisor/sponsor
Mainly use computers and equipment in the CommSys lab
Alternatively: Laptops are available to borrow or use the computers in the sjösystemet, CYD-poolen, eventually use own laptop, ...
SVN account to handle multiple versions of documentation and software
LIPS document templates are available from the courses web-page
http://www.commsys.isy.liu.se/en/student/kurser/TSKS05
Delivery in december/january after agreement with the sponsor
Project presentation: TBD
Lätt Interaktiv ProjektStyrning (LIPS)
Documents in a project Requirements specification (nagotiated with the sponsor) System sketch Project plan Time plan Design specification Status reports Meeting protocols Timesheets, updates once a week (provided to the supervisor) Technical documentation and User manual After study
At least four students in a group (max 7) Project leader (with previous experience of LIPS)
Leading designer Documentation leader Test leader
Projects HT 2016
Massive Audio Beamforming – version II
(Mikael Olofsson, Christopher Mollén)
Positioning and Tracking with the Pozyx Platform
(Danyo Danev, Trinh Van Chien)
Project group and choice of a project
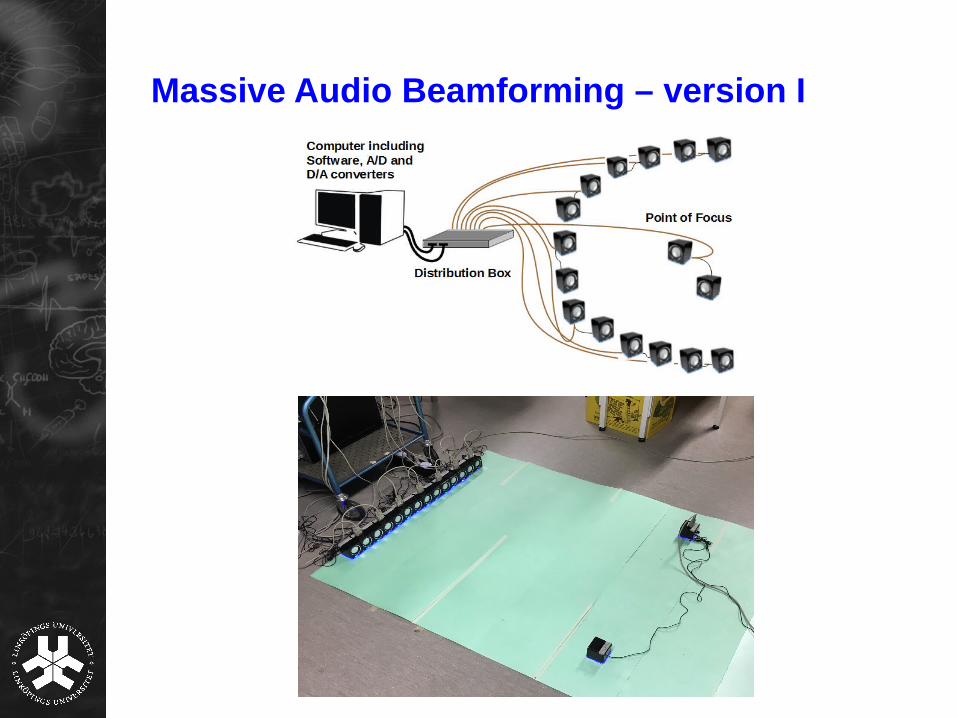
Massive Audio Beamforming – version I
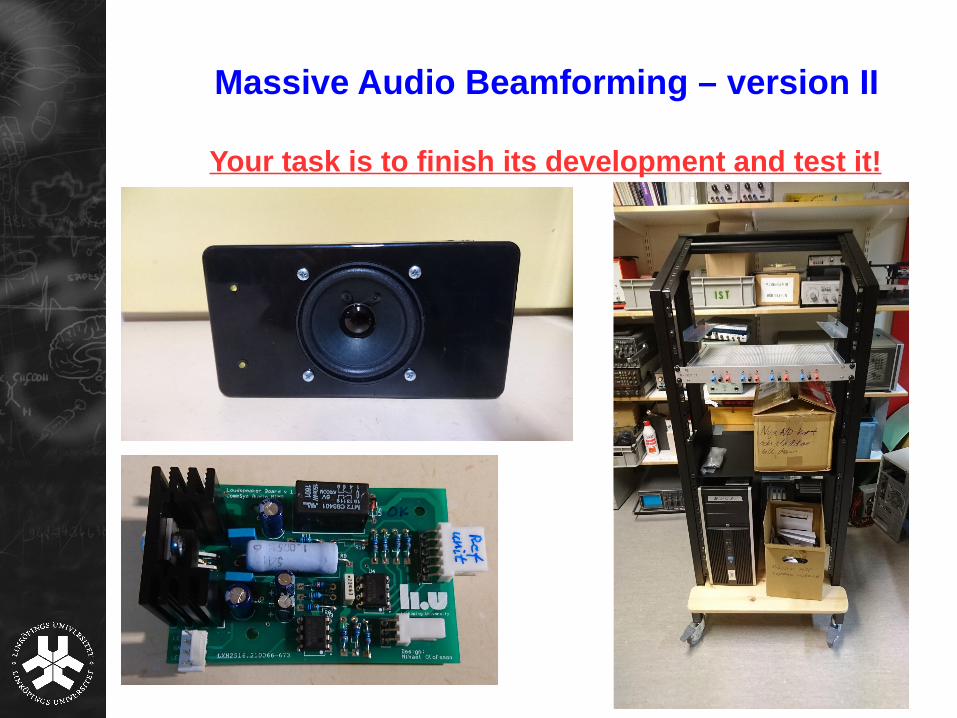
Massive Audio Beamforming – version II
Your task is to finish its development and test it!
Massive Audio Beamforming – other project ideas
● Directive Sound TransmissionAn array of loudspeakers that can produce different sounds in different directions or different locations in a room, so that one prerecorded sound can be heard at one position and another at another position without any interference.The other receivers thus will not be able to hear the message for the intended receiver. A demonstration of this interference suppression technique is another possible demonstrator setup.
● ZeroForcingBy doing careful channel estimation both from the intended receiver andfrom other receivers, the signals from the loudspeaker array can be precoded in such a way that no interference is overheard at the other receivers. The other receivers thus will not be able to hear the message for the intended receiver. A demonstration of this interference suppression technique is another possible demonstrator setup.
● Parallel Data TransmissionUsing multiuser precoding, it is possible to broadcast and receive many parallel streams of data, one stream to/from each user that the array has channel knowledge to.
● Cellphone as User EquipmentA smart phone could be programmed as the “user equipment" that communicates with the loudspeaker array. By programming a user interface as an application, the loudspeakers and microphne of the smart phone could be controlled to send pilots for channel estimation and for recording and decoding the received messages.
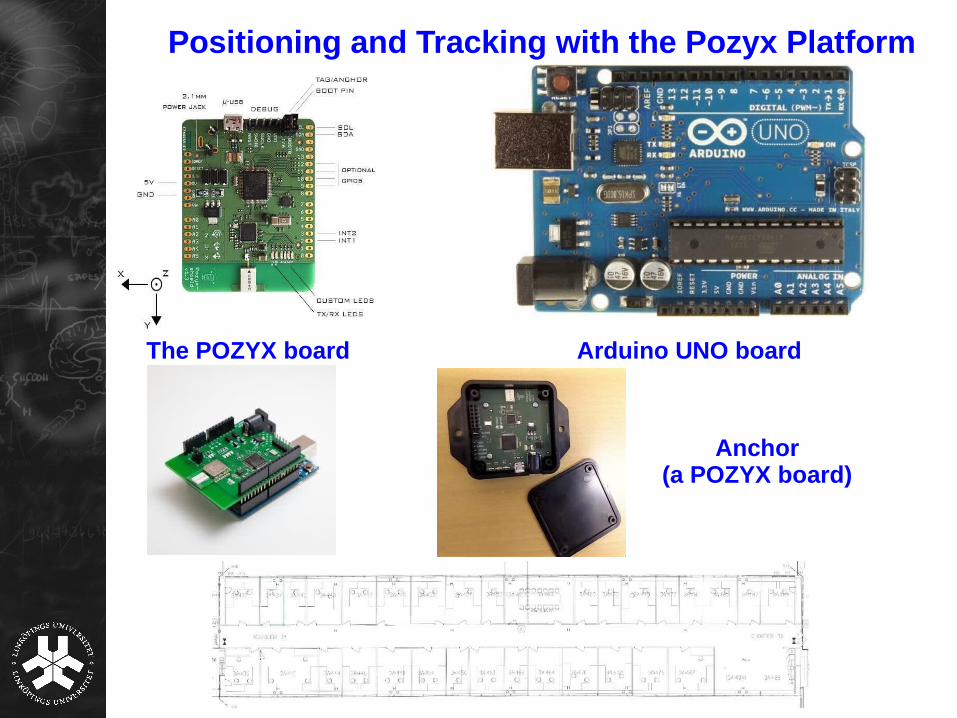
Positioning and Tracking with the Pozyx Platform
The POZYX board Arduino UNO board
Anchor(a POZYX board)
Positioning and Tracking with the Pozyx Platform
Useful Software:
ArduinoIDE – uploading commands
Processing IDE – reading the results
MATLAB – processing the results
● Tracking personnel in corridorStudents should deploy all 6 anchors across the CommSys corridor, and attach the tags on themselves (e.g. put in their pockets). The goal is to track themselves and to show the estimated track. Both LOS and NLOS scenario should be considered. NLOS can be created by deploying an anchor inside the office. Students should try to achieve a submeter accuracy even in the presence of NLOS.
● Tracking lawn mower in courtyard
The task is similar to the previous one, but now the goal is to track the lawn mowers outdoors. The anchors should be deployed on the office windows (outside), and the tag should be attached on the lawn mower (the one is available next to our corridor). One possible extension, students should obtain a GPS estimates of lawn mower position (e.g. using a smart phone), and compare the results with Pozyx estimates.
● Intruder detection
In this case, we would like to determine if unwanted person or object (intruder) entered CommSys corridor. The tricky part is that intruder is not equipped with a Pozyx tag, and likely he is not emitting any other signal. Therefore, students should analyze the UWB signals (complex impulse response is the most useful here) from deployed anchors when nobody is in corridor, and compare it with situations when someone/something enters the corridor. Then, they can create a classication algorithm, which will have a minimal number of false alarms and missed detections. A good performance is expected in case of heavy metal obstacles
Positioning and Tracking with the Pozyx Platform Project ideas
MaMIMO
Ema Becirovic <[email protected]>Linnea Faxén <[email protected]>Klas Gudmundsson <[email protected]>Eskil Jörgensen <[email protected]>Stefan Lundström <[email protected]>Javier Preciado <[email protected]>
POZYX
Pontus Erlesand <[email protected]>Markus Petersson <[email protected]>Susmita Saha <[email protected]>Rasmus Vilhelmsson <[email protected]>ChingHsiang Yang <[email protected]>
The Project Groups