tese 5,1 mb
TRANSCRIPT
i
Agradecimentos
Agradeço ao Prof. Luís Gato, orientador desta dissertação, pela possibilidade que me
ofereceu em realizar este trabalho, pela sua orientação que sempre me levou ao caminho que
eu procurava e à sua abertura às minhas ideias.
Ao Prof. Luís Ferro, do instituto politécnico de Setúbal, pela evolução que me
proporcionou ao longo deste trabalho, pelos dados do seu projecto disponibilizados e pelas
conversas esclarecedoras que me ofereceu.
Agradeço ainda ao Prof. Luís Eça, por toda a sua informação fornecida e pela sua
disponibilidade em expô-la e discuti-la.
Ao Prof. José Conde, da Faculdade de Ciências e Tecnologia da Universidade Nova de
Lisboa, pelos seus esclarecimentos e conselhos.
Aos Engenheiros João Baltazar, Miguel Lopes e Rui Gomes agradeço as suas boas
energias fornecidas e incansável partilha de informação.
Agradeço também ao Doutor João Henriques, do Instituto Nacional de Engenharia,
Tecnologia e Inovação, pelo material disponibilizado e pela sempre disponibilidade em
colaborar.
Agradeço também à minha família e a todos, os que me apoiaram neste desafio.
À minha menina quero ainda agradecer seu apoio e pedir-lhe desculpas pela minha
ausência durante a execução deste trabalho.
Agradeço ainda à Cristina Pureza pela preciosa revisão de texto.

ii
iii
Resumo
Foi efectuado um estudo numérico do escoamento numa roda de uma turbina
hidráulica axial, com 0,5 m de diâmetro.
O escoamento bidimensional em torno das cascatas de pás foi modelado utilizando um
método de painel. São apresentados resultados das distribuições de pressão, das
características polares e da evolução do coeficiente de sustentação numa gama de ângulos de
ataque próximos dos ângulos de projecto para escoamento invíscido e viscoso, incluindo o
cálculo de camada limite de acordo com a teoria de interacção fraca viscosa-invíscida, para as
cascatas de perfis da roda localizadas em diferentes raios.
O escoamento tridimensional viscoso foi calculado utilizando o código FLUENT.
Utilizaram-se os modelos de turbulência Spalart – Allmaras, k-ε padrão e k-ω proposto por
Wilcox. As malhas utilizadas são estruturadas e não estruturadas, com um máximo de
aproximadamente 2 × 106 elementos, tendo sido analisada a independência da solução com o
número de elementos da malha.
As condições fronteira utilizadas são as de perfil de velocidade imposto na secção de
entrada, condição de projecto de distribuição de quantidade de movimento angular conhecida
(momento angular constante), e de condição de saída livre na secção de saída. Comparam-se
as distribuições de pressão, de velocidade e de quantidade de movimento angular nas secções
de entrada e saída e na superfície das pás, obtidas com os diferentes modelos e com as
calculadas utilizando código o FLUENT para o escoamento tridimensional invíscido. As
distribuições de pressão sobre a superfície da pá são ainda comparadas com as obtidas com o
modelo de escoamento bidimensional invíscido (condição de projecto) e com as obtidas com o
modelo bidimensional viscoso.
Palavras Chave: Roda, Turbina Axial, FLUENT, Método dos Painéis

iv
v
Abstract
The paper reports a numerical study of the flow through the rotor of a 0.5 m diameter
axial hydraulic turbine.
The two-dimensional flow around the blade cascades was modelled using a panel
method. Results for the pressure distribution, lift and drag coefficients are presented, in a range
of incidence angles close to the design incidence angle, assuming inviscid and viscous flows.
The latter, includes the boundary layer calculation according to a weak viscous-inviscid
interaction formulation. Results are presented for several rotor blade sections located at
different radial positions.
The three-dimensional viscous flow was computed using the FLUENT code. The
Spalart-Allmaras, standard k-ε and k-ω (proposed by Wilcox) turbulence models were used.
Non-structured and structured meshes were tested, limited to a maximum of about 2x106
elements. The independence of the solution relative to the number of the mesh elements was
analysed.
Pressure, velocity and angular momentum distributions at the inlet and outlet sections
and on the blade surface, obtained with the different turbulence models were compared with the
ones computed using the FLUENT code for three-dimensional inviscid flow. The pressure
distributions on the blade surface were also compared with the ones obtained by the two-
dimensional inviscid method (design condition) and the ones obtained by viscous bi-
dimensional method.
Keywords: Rotor, Axial Turbine, FLUENT, panel method

vi
vii
Índice
Agradecimentos ........................................................................................... i Resumo....................................................................................................... iii Abstract ....................................................................................................... v Índice..........................................................................................................vii Lista de Quadros.........................................................................................ix Lista de Figuras...........................................................................................xi Lista de Símbolos.......................................................................................xv
1 - INTRODUÇÃO.............................................................................................. 1
1.1 - Objectivos e Estrutura da Tese .............................................................. 1 1.2 – Revisão Bibliográfica ............................................................................. 1
1.2.1 – Método Bidimensional ..................................................................... 2 1.2.2 – Método Tridimensional .................................................................... 2
2 – PROBLEMA EM ESTUDO........................................................................... 5
2.1 - Método de Projecto ................................................................................ 5 2.2 - Descrição da Geometria ......................................................................... 6
3 – TÉCNICAS NUMÉRICAS DE ANÁLISE...................................................... 9
3.1 - Método Bidimensional (Método dos Painéis).......................................... 9 3.2 - Método Tridimensional ......................................................................... 10
3.2.1 – Equações de Reynolds (introdução da média).............................. 11 3.2.1.1 – Conservação da Massa .......................................................... 12 3.2.1.2 – Balanço da Quantidade de Movimento................................... 12
3.2.2 – Modelos de Turbulência ................................................................ 13 3.2.2.1 – Modelo Spalart-Allmaras ........................................................ 13 3.2.2.2 – Modelo k-ε Padrão.................................................................. 15 3.2.2.3 – Modelo k-ω Padrão................................................................. 15
3.2.3 – Condições fronteira ....................................................................... 17 3.2.3.1 – Superfície de Entrada ............................................................. 17 3.2.3.2 – Superfície de Saída ................................................................ 18 3.2.3.3 – Superfícies Periódicas ............................................................ 18 3.2.3.4 – Superfícies Sólidas ................................................................. 18
3.2.3.4.1 – Modelo Spalart-Allmaras .................................................. 18 3.2.3.4.2 – Modelo k-ε Padrão ........................................................... 19 3.2.3.4.3 – Modelo k-ω....................................................................... 21
4 - RESULTADOS ........................................................................................... 23
4.1 - Método Bidimensional .......................................................................... 23 4.2 - Método Tridimensional ......................................................................... 29
4.2.1 – Geração de Malha......................................................................... 29 4.2.1.1 – Modelo k-ε .............................................................................. 31 4.2.1.2 – Modelos k-ω e Spalart-Almaras.............................................. 35
4.2.2 – Descrição das Simulações ............................................................ 38 4.2.3 – Condições de Fronteira ................................................................. 38 4.2.4 – Convergência ................................................................................ 40
4.2.4.1 – Estimação do Erro Numérico e Convergência da Solução ..... 40

viii
4.2.4.1.1 – Modelo k-ε........................................................................ 41 4.2.4.1.2 – Modelo k-ω....................................................................... 43 4.2.4.1.3 – Modelo Spalart-Allmaras .................................................. 44
4.2.4.2 – Convergência do Processo Iterativo ....................................... 46 4.2.4.1.2 – Modelo k-ε........................................................................ 46 4.2.4.1.2 – Modelo k-ω....................................................................... 48 4.2.4.1.2 – Modelo Spalart-Allmaras .................................................. 49
4.2.5 – Verificação de Y+........................................................................... 50 4.2.5.1 – Modelo k-ε .............................................................................. 50 4.2.5.2 – Modelo k-ω e Spalart-Allmaras............................................... 52
4.2.6 – Resultados Obtidos ....................................................................... 54 4.3 - Comparação entre o Método Bidimensional e o Tridimensional........... 64 4.4 – Simulações com o Esquema PRESTO................................................ 66
4.4.1 – PRESTO no modelo k-ω ............................................................... 67 4.4.1 – PRESTO no modelo Spalart-Allmaras .......................................... 68
5 - CONCLUSÕES........................................................................................... 71
Referências Bibliográficas......................................................................... 72 Anexos ...................................................................................................... 74
Anexo 1 – Geometria dos diferentes perfis de projecto......................... 74 Anexo 2 – Características de projecto ................................................... 75 Anexo 3 – Índices de qualidade das malhas utilizadas ......................... 76 Anexo 4 – Gráficos da evolução do resíduo .......................................... 79
ix
Lista de Quadros
Tabela 1.1: características das cascatas de pás da roda……………………………………………8
Tabela 4.1: Resultados obtidos no método bidimensional para cada perfil…………………..….24
Tabela 4.2: Características das malhas não estruturadas utilizadas……………………....……..32
Tabela 4.3: Características das malhas não estruturadas no “anel” da pá…………………..…..32
Tabela 4.4: Número de elementos nas fronteiras das malhas não estruturadas………………..33
Tabela 4.5: Distribuição do ângulo de distorção dos elementos nas malhas não estruturadas.33
Tabela 4.6: Distribuições dos elementos nas direcções r, θ e z para as malhas hexaédricas
estruturadas……………………………………………………………………………….34
Tabela 4.7: Número de elementos nas fronteiras das malhas não estruturadas……………..…34
Tabela 4.8: Distribuição do ângulo de distorção dos elementos nas malhas estruturadas….…35
Tabela 4.9: Distribuições dos elementos nas direcções r, θ e z para as malhas hexaédricas
estruturadas………………………………………………………………….……………36
Tabela 4.10: Características das malhas não estruturadas no “anel” da pá……..………………36
Tabela 4.11: Número de elementos nas fronteiras das malhas estruturadas……………..…..…37
Tabela 4.12: Distribuição do ângulo de distorção dos elementos nas malhas estruturadas…...37
Tabela 4.13: Incerteza numérica devida ao erro de discretização para as malhas estruturada e
não estruturada mais refinadas, no modelo k-ε……………………………...…….….43
Tabela 4.14: Incerteza numérica devida ao erro de discretização para as malhas estruturada e
não estruturada mais refinadas, no modelo Spalart-Allmaras…………………….…45
Tabela 4.15: Factores de sub-relaxação utilizados no modelo k-ε com as malhas
estruturadas……………………………………………………………………………….46
Tabela 4.16: Factores de sub-relaxação utilizados no modelo k-ε com as malhas não
estruturadas……………………………………………………………………………….47
Tabela 4.17: Factores de sub-relaxação utilizados no modelo k-ω……………………………….48
Tabela 4.18: Factores de sub-relaxação utilizados no modelo Spalart-Allmaras………………..49
Tabela A1: Características geométricas dos diferentes perfis em função do raio……………….75
Tabela A2: Ângulos geométricos e cinemáticos (medidos em graus)…………………………….75
Tabela A3: Valores utilizados no projecto dos perfis intermédios…………………………………76
Tabela A4: Parâmetros de qualidade das malhas para a malha não estruturada de
148318 elementos utilizada no modelo k-ε…………………………………………….76
Tabela A5: Parâmetros de qualidade das malhas para a malha não estruturada de
334002 elementos utilizada no modelo k-ε……………………………………….……76
Tabela A6: Parâmetros de qualidade das malhas para a malha não estruturada de
797531 elementos utilizada no modelo k-ε…………………………………………….76
Tabela A7: Parâmetros de qualidade das malhas para a malha não estruturada de
1936342 elementos utilizada no modelo k-ε…………………………………………..77
Tabela A8: Parâmetros de qualidade das malhas para a malha estruturada de
129168 elementos utilizada no modelo k-ε…………………………………………….77
x
Tabela A9: Parâmetros de qualidade das malhas para a malha estruturada de
319158 elementos utilizada no modelo k-ε…………………………………………….77
Tabela A10: Parâmetros de qualidade das malhas para a malha estruturada de
831128 elementos utilizada no modelo k-ε…………………………………………….77
Tabela A11: Parâmetros de qualidade das malhas para a malha estruturada de
2152516 elementos utilizada no modelo k-ε…………………………………………..78
Tabela A12: Parâmetros de qualidade das malhas para a malha estruturada de
127188 elementos utilizada no modelo k-ω e Spalart-Allmaras…………………….78
Tabela A13: Parâmetros de qualidade das malhas para a malha estruturada de
299782 elementos utilizada no modelo k-ω e Spalart-Allmaras…………………….78
Tabela A14: Parâmetros de qualidade das malhas para a malha estruturada de
765824 elementos utilizada no modelo k-ω e Spalart-Allmaras…………………….78
Tabela A15: Parâmetros de qualidade das malhas para a malha estruturada de
2033040 elementos utilizada no modelo k-ω e Spalart-Allmaras……………….…..79
xi
Lista de Figuras Figura 1.1: Características geométricas dos perfis do rotor. (a) e/emax (b) f/fmax (c) declive da
linha média (m)……………………………………...................................................….7
Figura 1.2: Características aerodinâmicas dos perfis”mãe” (a) coeficiente de pressão mínimo
em função do ângulo de ataque α, (b) localização do ponto de pressão mínima em
função do ângulo de ataque α…………………………………………………………....7
Figura 1.3: Geometria pá: (a) perspectiva; (b) vista rebatida no plano meridiano; (c) cascata
cilíndrica; (d) vista ZY; (e) vista XY; (f) vista ZX………………………………………...8
Figura 4.1: Evolução do coeficiente de resistência em função do coeficiente de sustentação nos
perfis onde não ocorre separação………………………………………………………25
Figura 4.2: Evolução do coeficiente de resistência em função do coeficiente de sustentação nos
perfis onde não ocorre separação………………………………………………………27
Figura 4.3: Distribuição do coeficiente de pressão em cada um dos perfis para fluido perfeito e
fluido real…………………………………………………………………………………..28
Figura 4.4: Descrição da configuração da roda na topologia turbo……………………………….30
Figura 4.5: Domínio de cálculo utilizado em todas as simulações tridimensionais……………...30
Figura 4.6: Pormenor da malha não estruturada (a) em torno da pá, (b) próximo do cubo e da
caixa e no restante domínio…………………………………………………………..…31
Figura 4.7: (a) “Anel” em torno da pá, (b) subdivisões da malha não estruturada………………31
Figura 4.8: Subdivisões da malha estruturada…………………………...………………………….34
Figura 4.9: Vista geral da malha estruturada de 129 mil elementos……………………………...35
Figura 4.10: Perspectiva geral da geometria utilizada no modelo k-ω padrão e
Spalart-Almaras………………………………………………………………………...…36
Figura 4.11: Vista geral da malha estruturada de 300 mil elementos com camada limite
fina………………………………………………………………………………………….37
Figura 4.12: Vista geral das três regiões cubo da roda com a pá…………………………………39
Figura 4.13: Variação de grandezas globais com o número de elementos da malha no modelo
k-ε: (a) número de rotação à entrada; (b) número de rotação à saída; (c) ângulo da
componente radial à entrada; (d) ângulo da componente radial à saída;
(e) rendimento; (f) coeficiente de perda……………………….……………………….42
Figura 4.14: Variação de grandezas globais com o número de elementos da malha no modelo
k-ω: (a) número de rotação à entrada; (b) número de rotação à saída; (c) ângulo da
componente radial à entrada; (d) ângulo da componente radial à saída;
(e) rendimento; (f) coeficiente de perda…………………………………………….…44
Figura 4.15: Variação de grandezas globais com o número de elementos da malha no modelo
Spalart-Allmaras: (a) número de rotação à entrada; (b) número de rotação à saída;
(c) ângulo da componente radial à entrada; (d) ângulo da componente radial à
saída; (e) rendimento; (f) coeficiente de perda……………………………………….45
xii
Figura 4.16: Gráfico de evolução do resíduo para a malha estruturada de
2152516 elementos………………………………………...………………………….…47
Figura 4.17: Gráfico de evolução do resíduo para a malha não estruturada de
1936342 elementos………………………………………………………………………47
Figura 4.18: Gráfico de evolução do resíduo para a malha de 765824 elementos………….….49
Figura 4.19: Gráfico de evolução do resíduo para a malha de 2033040 elementos…………....50
Figura 4.20: Valores de Y+ obtidos na malha estruturada de 2152516 elementos para o modelo
k-ε: (a) no invólucro exterior; (b) no cubo; (c) no lado de pressão da pá; (d) no lado
de sucção da pá…………………………………………………………………………..51
Figura 4.21: Valores de Y+ obtidos na malha não estruturada de 1936342 elementos para o
modelo k-ε: (a) no invólucro exterior; (b) no cubo; (c) no lado de pressão da pá;
(d) no lado de sucção da pá………………………………………………………….....52
Figura 4.22: Valores de Y+ obtidos na malha estruturada de 765824 elementos para o modelo
k-ω: no invólucro exterior; (b) no cubo; (c) no lado de pressão da pá; (d) no lado de
sucção da pá………………………………………………………………………………53
Figura 4.23: Valores de Y+ obtidos na malha estruturada de 2033040 elementos para o modelo
Spalart-Allmaras: (a) no invólucro exterior; (b) no cubo; (c) no lado de pressão da
pá; (d) no lado de sucção da pá………………………………………………………...53
Figura 4.24: Médias axissimétricas da velocidade axial: na secção de entrada: (a) realce dos
perfis, (b) vista geral, (c) pormenor junto do invólucro exterior; (d) na secção em
z = 0.75 m ………………………………………………………………………………..55
Figura 4.25: Médias axissimétricas da velocidade axial na secção de saída……………………55
Figura 4.26: Médias axissimétricas da velocidade radial: (a) entrada; (b) saída………………..56
Figura 4.27: Médias axissimétricas da velocidade tangencial: (a) entrada; (b) saída…………..56
Figura 4.28: Médias axissimétricas da velocidade tangencial relativa: (a) entrada; (b) saída…56
Figura 4.29: Médias axissimétricas do momento angular: (a) entrada; (b) saída……………….57
Figura. 4.30: Distribuições do coeficiente de pressão total, C0, na secção de entrada para:
(a) Modelo k-ε não estruturada; (b) Modelo k-ε estruturada; (c) Modelo k-ω;
(d) Modelo Spalart-Almaras………………………………………………………...…...58
Figura 4.31: Distribuições do coeficiente de pressão total na saída: (a) Modelo k-ε não
estruturada; (b) Modelo k-ε estruturada; (c) Modelo k-ω; (d) Modelo
Spalart-Almaras…………………………………………………………..…………….…59
Figura 4.32: Distribuições do momento angular na secção de entrada para: (a) Modelo k-ε não
estruturada; (b) Modelo k-ε estruturada; (c) Modelo k-ω; (d) Modelo
Spalart-Almaras…………………………………………………………………………...59
Figura 4.33: Distribuições do momento angular na secção saída para: (a) Modelo k-ε não
estruturada; (b) Modelo k-ε estruturada; (c) Modelo k-ω; (d) Modelo
Spalart-Almaras…………………………………………………………………………...60
xiii
Figura 4.34: Distribuições do coeficiente de pressão no intradorso da pá para: (a) Modelo k-ε
não estruturada; (b) Modelo k-ε estruturada; (c) Modelo k-ω; (d) Modelo
Spalart-Almaras…………………………………………………………………………...61
Figura 4.35: Distribuições do coeficiente de pressão no extradorso da pá para: (a) Modelo k-ε
não estruturada; (b) Modelo k-ε estruturada; (c) Modelo k-ω; (d) Modelo
Spalart-Almaras………………………………………………………………………...…61
Figura 4.36: Distribuição do coeficiente de pressão para os três modelos nos doze perfis
utilizado…………………………………………………………………………………….63
Figura 4.37: Distribuição do coeficiente de pressão para os três modelos nos doze perfis
utilizado para o modelo Spalart-Allmaras e método bidimensional…………………65
Figura 4.38: Gráfico de evolução do resíduo da malha estruturada de 299782 elementos
utilizada no modelo k-ω com o esquema de segunda ordem……………………….67
Figura 4.39: Gráfico de evolução do resíduo da malha estruturada de 299782 elementos
utilizada no modelo k-ω com o esquema PRESTO…………………………………..67
Figura 4.40: Gráfico de evolução do resíduo da malha estruturada de 2033040 elementos
utilizada no modelo Spalart-Allmaras com o esquema PRESTO…………………...68
Figura 4.41: Distribuição do coeficiente de pressão os dois esquemas de pressão no modelo
Spalart-Allmaras e método bidimensional…………………………………………..…70
Figura A1: Geometria dos diferentes perfis de projecto……………………………………………74
Figura A2: Gráfico de desenvolvimento residual da malha estruturada de 129168 elementos
utilizada no modelo k-ε…………………………………………………………………...79
Figura A3: Gráfico de evolução do resíduo da malha estruturada de 319158 elementos utilizada
no modelo k-ε….......................................................................................................79
Figura A4: Gráfico de evolução do resíduo da malha estruturada de 831128 elementos utilizada
no modelo k-ε……………………………………………………………...……………...80
Figura A5: Gráfico de evolução do resíduo da malha estruturada de 2152516 elementos
utilizada no modelo k-ε…………………………………………………………………...80
Figura A6: Gráfico de evolução do resíduo da malha não estruturada de 148318 elementos
utilizada no modelo k-ε…………………………………………………………………...80
Figura A7: Gráfico de evolução do resíduo da malha não estruturada de 334002 elementos
utilizada no modelo k-ε.............................................................................................81
Figura A8: Gráfico de evolução do resíduo da malha não estruturada de 797531 elementos
utilizada no modelo k-ε…………………………………………………………………...81
Figura A9: Gráfico de evolução do resíduo da malha não estruturada de 1936342 elementos
utilizada no modelo k-ε.............................................................................................81
Figura A10: Gráfico de evolução do resíduo da malha estruturada de 127188 elementos
utilizada no modelo k-ω………………………………………………………………….82
Figura A11: Gráfico de evolução do resíduo da malha estruturada de 299782 elementos
utilizada no modelo k-ω………………………………………………………………….82
xiv
Figura A12: Gráfico de evolução do resíduo da malha estruturada de 765824 elementos
utilizada no modelo k-ω………………………………………………………………….82
Figura A13: Gráfico de evolução do resíduo da malha estruturada de 2033040 elementos
utilizada no modelo k-ω………………………………………………………………….83
Figura A14: Gráfico de evolução do resíduo da malha estruturada de 127188 elementos
utilizada no modelo Spalart-Allmaras……………………………………………….….83
Figura A15: Gráfico de evolução do resíduo da malha estruturada de 299782 elementos
utilizada no modelo Spalart-Allmaras…………………………………………………..83
Figura A16: Gráfico de evolução do resíduo da malha estruturada de 765824 elementos
utilizada no modelo Spalart-Allmaras…………………………………………………..84
Figura A17: Gráfico de evolução do resíduo da malha estruturada de 2033040 elementos
utilizada no modelo Spalart-Allmaras…………………………………………………..84
xv
Lista de Símbolos A área
c corda
DC coeficiente de resistência
LC coeficiente de sustentação
PC coeficiente de pressão
0C coeficiente de pressão total
d distância à parede
D diâmetro exterior
DH diâmetro hidráulico
Din diâmetro interior
E energia interna, constante empírica
emax espessura máxima
fmax flecha máxima
1υf função de amortecimento
kG geração de energia cinética turbulenta
υG produção de viscosidade turbulenta
h a dimensão típica da malha.
H altura de queda
I intensidade de turbulência
k momento angular, energia cinética turbulenta
κ constante de Von Kárman
Pk energia cinética turbulenta no ponto P
Sk rugosidade
μl comprimento de mistura de μ
εl comprimento de mistura de ε
n coordenada local paralela à parede
nelem número de elementos
gn número de malhas
P pressão estática, passo, ordem de convergência observada
relP0 pressão total relativa
∞p pressão estática de referência
Q caudal mássico
r raio
R raio exterior
Re número de Reynolds
xvi
S~ medida escalar do tensor de deformação
si comprimento inicial
mS distância do ponto médio do painel ao bordo de fuga
smax comprimento máximo
ijS taxa de deformação
T temperatura
tc taxa de crescimento
t2c taxa de crescimento em duplo sentido
tri taxa de crescimento segundo a direcção radial
tai taxa de crescimento segundo a direcção axial
iu~ valor médio da velocidade
iu velocidade média
′iu flutuação da velocidade média
τu velocidade de corte (fricção)
U∞ velocidade exterior
PU velocidade média no ponto P
( )φU incerteza
aV velocidade axial
rV velocidade radial
refV velocidade de referência
Vθ velocidade tangencial
wv velocidade de transpiração
vr
vector velocidade
θW velocidade tangencial relativa
Xsep localização da separação da camada limite turbulenta
υΥ dissipação da viscosidade turbulenta
y distância à parede
Py distância do ponto P à parede
+y altura do primeiro elemento adjacente a uma parede sólida
υ viscosidade cinemática
ρ massa específica
μ viscosidade dinâmica
tμ viscosidade turbulenta
MΔ erro estimado
Γ número de rotação
xvii
kΓ difusão efectiva de k
ωΓ difusão efectiva de ω
β ângulo da componente radial
η rendimento
aζ coeficiente de perda
α ângulo de ataque
λ ângulo de calagem da cascata
γ intensidade do vórtice
0γ constante a ser determinada pela condição de Kutta
*δ espessura de deslocamento da camada limite
φ solução numérica
exactφ solução exacta
φ~ valor médio de uma quantidade escalar
φ média de uma quantidade escalar
φ′ flutuação da média de uma quantidade escalar
iφ solução para uma dada malha
oφ estimativa da solução exacta para uma malha de dimensão infinitesimal
ε taxa de dissipação de turbulência
ω taxa de dissipação específica
τ tensor das tensões
Φ função de dissipação
υ~ variável transportada no modelo Spalart-allmaras
ijΩ vorticidade

xviii
1
1 - Introdução
1.1 - Objectivos e Estrutura da Tese
Neste trabalho pretende-se validar, através de um estudo numérico para escoamento
viscoso o método de projecto do rotor de uma turbina hidráulica do tipo tubular, proposto pelo
Mestre Luís Morão Cabral Ferro, na sua dissertação para a obtenção do grau de doutor em
Engenharia Mecânica, a ser submetida em 2008 [1].
Para o estudo numérico utilizaram-se dois métodos: um bidimensional – método dos
painéis com camada limite em cascata [2]; e um tridimensional, com um grau de complexidade
mais elevado quando comparado com o estudo bidimensional – equações de Navier-Stokes
escritas em função dos valores médios de Reynolds incluídas no código FLUENT (versão
6.2.16) [3], com malhas geradas utilizando o código GAMBIT 2.2 [4].
O estudo inicia-se com uma breve revisão bibliográfica sobre a evolução dos métodos
de análise utilizados (tópico seguinte deste capitulo introdutório). Seguidamente, no capítulo 2,
é descrito, genericamente, o método de projecto utilizado no dimensionamento da roda, assim
como a geometria utilizada.
No terceiro capítulo descrevem-se as técnicas numéricas de análise utilizadas neste
estudo; o método dos painéis (2-D) e as Equações de Navier-Stokes escritas em função dos
valores médios de Reynolds incluídas no código FLUENT, com os respectivos modelos de
turbulência e condições de fronteira.
As simulações efectuadas pelos dois métodos de estudo são descritas no capítulo 4,
seguidas da apresentação dos resultados obtidos e sua comparação. Também nesse capítulo,
comparam-se os valores do método de projecto e os valores de um estudo invíscido
tridimensional, efectuado com o mesmo código [5], com os resultados das simulações
descritas.
Por fim, as conclusões são discutidas e apresentadas no capítulo 5.
1.2 – Revisão Bibliográfica
Nesta secção refere-se, brevemente, a evolução dos métodos de análise utilizados na
validação do método de projecto da roda da turbina em estudo.
2
1.2.1 – Método Bidimensional
Os primeiros modelos numéricos do escoamento em torno de perfis alares são
baseados na técnica de transformação conforme [6]. A técnica de transformação conforme, da
qual a mais conhecida neste contexto é a transformação de Jowkowski, procura uma
transformação do escoamento no domínio de um cilindro circular, com circulação, para o
escoamento no domínio de um perfil alar [7], neste caso o perfil de Jowkowski.
De forma a se obter solução para qualquer tipo de perfil real, a transformação conforme
é desenvolvida analiticamente e aplicada no método de Theodorsen [8]. Este método utiliza a
transformação de Jowkowski e em seguida, através de uma série de transformações de
influência localizada, obtém a geometria do perfil pretendido.
Com base no teorema de Green podem ser conseguidas distribuições de
singularidades ao longo da fronteira do corpo em vez de no seu interior, permitindo contornar o
inconveniente referido atrás. O método das equações integrais de fronteira, recorrendo às
distribuições de singularidades em torno do perfil discretizado, ficou conhecido como o método
do painel, inicialmente desenvolvido e explorado em computador por John Hess [8,9].
Eça & Falcão de Campos [2] apresentam uma abordagem que permite introduzir os
efeitos de camada limite. A solução do escoamento potencial é baseada na solução da
equação de Laplace usando distribuições superficiais de fontes. A intensidade dos vórtices
varia, com a distância ao bordo de fuga, ao longo da linha média. A solução invíscida é
acoplada com um cálculo de camada limite de acordo com a teoria de interacção fraca
viscosa-invíscida.
1.2.2 – Método Tridimensional
O método das diferenças finitas é o método mais antigo para a solução numérica de
equações diferenciais e acredita-se que foi introduzido por Euler no século XVIII. O seu ponto
de partida é a equação da conservação na forma diferencial, que é aproximada em cada ponto
da malha por diferenças finitas [10].
O método dos volumes finitos usa as equações da conservação na forma integral como
ponto de partida. O domínio de solução é subdividido num número finito de volumes de
controlo, sendo as equações de conservação aplicadas em cada um deles [10].
A aplicação do método dos volumes finitos na resolução das equações de
Navier-Stokes em valor médio, em geometrias complexas, tornou-se possível com o aumento
de memória e da velocidade de processamento dos computadores. Os progressos ocorridos ao
nível da eficiência e precisão dos algoritmos permitem que estas técnicas sejam também
utilizadas no projecto de turbomáquinas [11].

3
Os trabalhos desenvolvidos por Spalart & Allmaras [12], entre outros, na modelação da
turbulência foram decisivos para desenvolver algoritmos capazes de analisar o escoamento
nas pás de turbomáquinas em condições reais.
O cálculo do escoamento turbulento tridimensional em zonas de escoamento
complexo, utilizando modelos de turbulência, é ainda hoje um assunto em pleno
desenvolvimento [13].

4
5
2 – Problema em Estudo
2.1 - Método de Projecto
O presente estudo refere-se ao projecto da turbina hidráulica apresentada em [1] que
seguidamente se descreve de forma sumária.
As pás da roda da turbina estão contidas entre duas superfícies aproximadamente
cilíndricas de eixo comum, coincidente com o eixo de rotação da turbina. A superfície exterior,
correspondente ao invólucro exterior do rotor, tem diâmetro D e a interior, correspondente ao
cubo, tem diâmetro Din, excepto na região da pá, em que estas superfícies tomam a forma de
uma calote esférica, de forma a poder regular o ângulo das pás e permitir a sua rotação em
torno do seu eixo.
A forma das superfícies de corrente a montante da pá pouco se deverá afastar de
superfícies cilíndricas de revolução coaxiais com o eixo de rotação. Se se admitir que a
montante e a jusante das pás a velocidade axial não varia com o raio e que o momento angular
rVθ é constante, segundo a coordenada radial, então a componente radial será nula e o
escoamento pode ser considerado como potencial ao longo das pás. O escoamento real no
rotor pode assim ser substituído por um conjunto de escoamentos planos em cascata de pás,
correspondente às várias superfícies de corrente, e pode ser resolvido, entre outros, pelo
método de painel. Nos cálculos efectuados para o método de projecto foi utilizado um método
de painel de 1ª ordem, baseado no descrito em [14].
A definição da forma dos perfis de velocidade exige a especificação dos triângulos de
velocidade a montante e a jusante da roda. A solução do escoamento meridiano, obtida pelo
método da curvatura das linhas de corrente [15], conduziu a resultados que não são
compatíveis com a aproximação de escoamento plano numa cascata cilíndrica, com variações
da componente axial na direcção do eixo. Para o método de projecto foi considerada a
velocidade axial como a média das velocidades nas secções de entrada e de saída da roda e o
raio da superfície cilíndrica como a média dos raios das linhas de corrente do escoamento
meridiano nas secções de entrada e saída da roda. A componente tangencial da velocidade na
secção de entrada da roda é dada por Vθ = K/r, onde K é o momento angular na secção de
entrada, constante ao longo do raio. Na secção de saída foi assumido que a componente
tangencial da velocidade e, consequentemente, o momento angular são nulos (rVθ = 0).
O tipo de perfil foi escolhido de forma que as suas características geométricas
assegurem que a carga sobre a pá é o mais uniforme possível e a reduzir a possibilidade de
cavitação, evitando gradientes acentuados nas distribuições de pressão sobre o contorno do
perfil. Todos os perfis escolhidos pertencem à mesma família, NACA 66 modificado tal como
descrito por Brockett [16], de forma a se obter uma menor torção da pá e uma superfície mais
regular. Estes perfis tem boas características aerodinâmicas (baixos valores de CD/CL) e boas
6
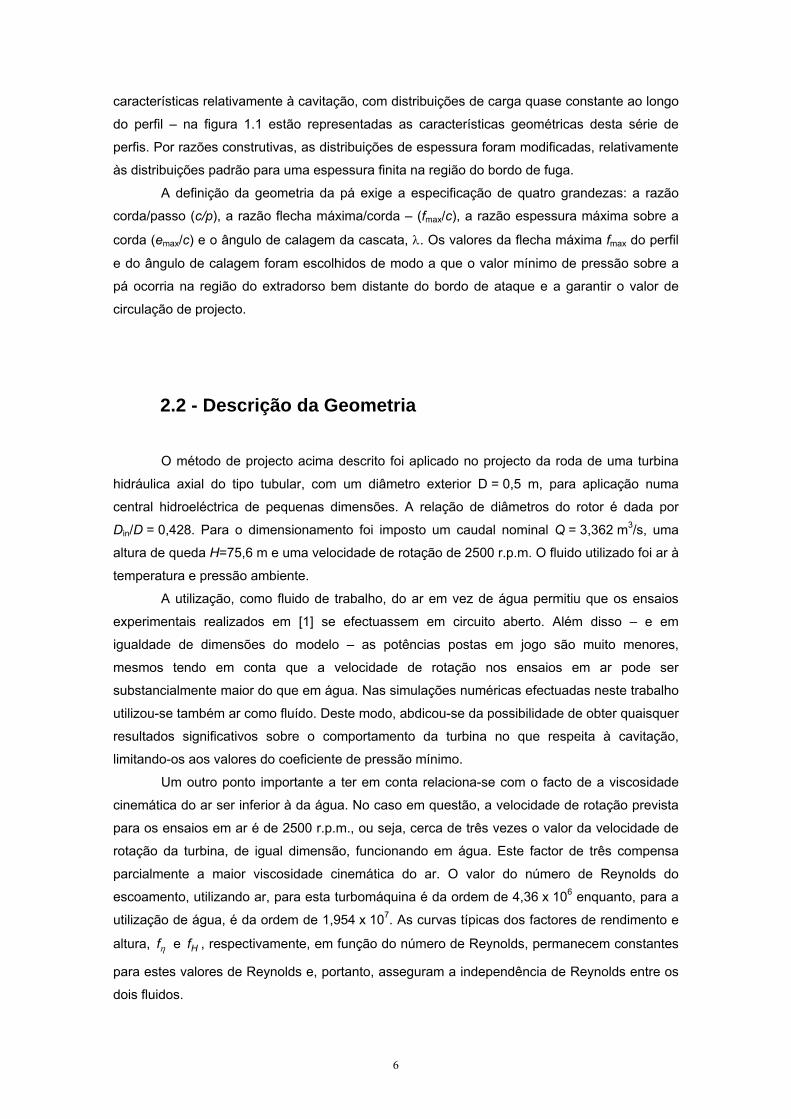
características relativamente à cavitação, com distribuições de carga quase constante ao longo
do perfil – na figura 1.1 estão representadas as características geométricas desta série de
perfis. Por razões construtivas, as distribuições de espessura foram modificadas, relativamente
às distribuições padrão para uma espessura finita na região do bordo de fuga.
A definição da geometria da pá exige a especificação de quatro grandezas: a razão
corda/passo (c/p), a razão flecha máxima/corda – (fmax/c), a razão espessura máxima sobre a
corda (emax/c) e o ângulo de calagem da cascata, λ. Os valores da flecha máxima fmax do perfil
e do ângulo de calagem foram escolhidos de modo a que o valor mínimo de pressão sobre a
pá ocorria na região do extradorso bem distante do bordo de ataque e a garantir o valor de
circulação de projecto.
2.2 - Descrição da Geometria
O método de projecto acima descrito foi aplicado no projecto da roda de uma turbina
hidráulica axial do tipo tubular, com um diâmetro exterior D = 0,5 m, para aplicação numa
central hidroeléctrica de pequenas dimensões. A relação de diâmetros do rotor é dada por
Din/D = 0,428. Para o dimensionamento foi imposto um caudal nominal Q = 3,362 m3/s, uma
altura de queda H=75,6 m e uma velocidade de rotação de 2500 r.p.m. O fluido utilizado foi ar à
temperatura e pressão ambiente.
A utilização, como fluido de trabalho, do ar em vez de água permitiu que os ensaios
experimentais realizados em [1] se efectuassem em circuito aberto. Além disso – e em
igualdade de dimensões do modelo – as potências postas em jogo são muito menores,
mesmos tendo em conta que a velocidade de rotação nos ensaios em ar pode ser
substancialmente maior do que em água. Nas simulações numéricas efectuadas neste trabalho
utilizou-se também ar como fluído. Deste modo, abdicou-se da possibilidade de obter quaisquer
resultados significativos sobre o comportamento da turbina no que respeita à cavitação,
limitando-os aos valores do coeficiente de pressão mínimo.
Um outro ponto importante a ter em conta relaciona-se com o facto de a viscosidade
cinemática do ar ser inferior à da água. No caso em questão, a velocidade de rotação prevista
para os ensaios em ar é de 2500 r.p.m., ou seja, cerca de três vezes o valor da velocidade de
rotação da turbina, de igual dimensão, funcionando em água. Este factor de três compensa
parcialmente a maior viscosidade cinemática do ar. O valor do número de Reynolds do
escoamento, utilizando ar, para esta turbomáquina é da ordem de 4,36 x 106 enquanto, para a
utilização de água, é da ordem de 1,954 x 107. As curvas típicas dos factores de rendimento e
altura, ηf e Hf , respectivamente, em função do número de Reynolds, permanecem constantes
para estes valores de Reynolds e, portanto, asseguram a independência de Reynolds entre os
dois fluidos.
7
x/c
e/e m
ax
0.0 0.2 0.4 0.6 0.8 1.00.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
x/cf/f
max
0.0 0.2 0.4 0.6 0.8 1.00.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
x/c
m
0.0 0.2 0.4 0.6 0.8 1.0
-4
-2
0
2
4
6
8
10
(a) (b) (c)
Fig. 1.1: Características geométricas dos perfis do rotor. (a) e/emax (b) f/fmax (c) declive da linha média (m).
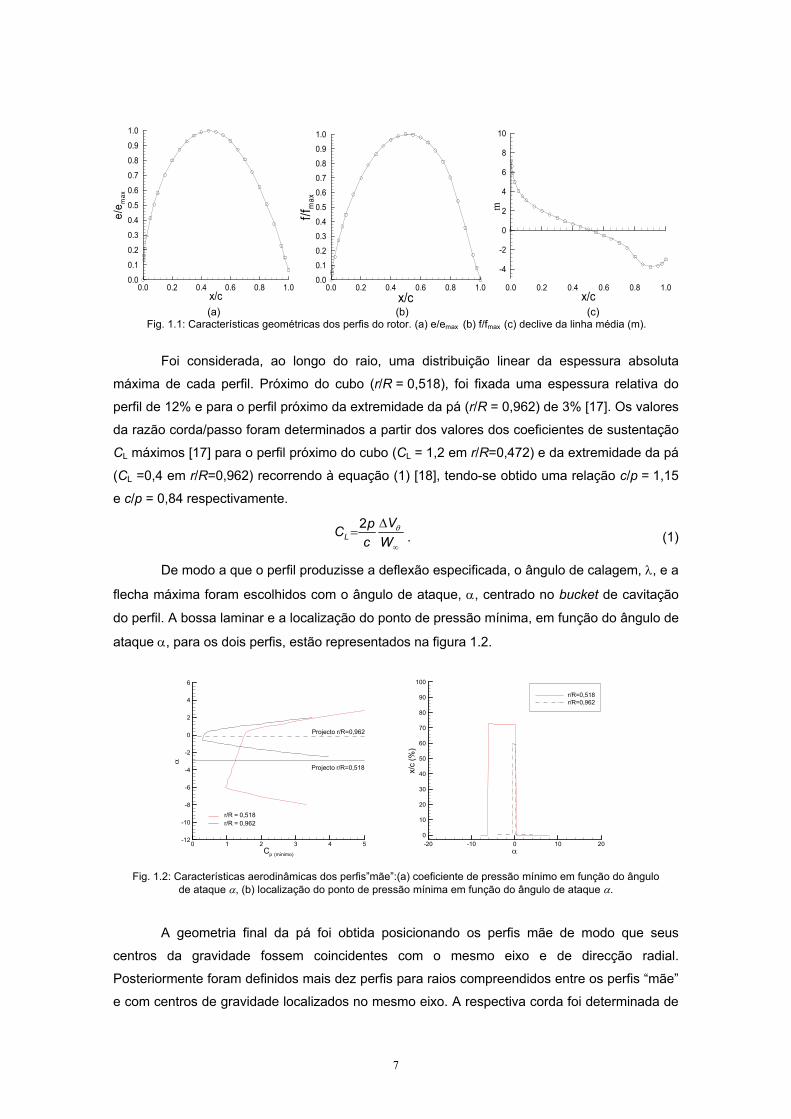
Foi considerada, ao longo do raio, uma distribuição linear da espessura absoluta
máxima de cada perfil. Próximo do cubo (r/R = 0,518), foi fixada uma espessura relativa do
perfil de 12% e para o perfil próximo da extremidade da pá (r/R = 0,962) de 3% [17]. Os valores
da razão corda/passo foram determinados a partir dos valores dos coeficientes de sustentação
CL máximos [17] para o perfil próximo do cubo (CL = 1,2 em r/R=0,472) e da extremidade da pá
(CL =0,4 em r/R=0,962) recorrendo à equação (1) [18], tendo-se obtido uma relação c/p = 1,15
e c/p = 0,84 respectivamente.
∞
Δ=
WV
cpCL
θ2. (1)
De modo a que o perfil produzisse a deflexão especificada, o ângulo de calagem, λ, e a
flecha máxima foram escolhidos com o ângulo de ataque, α, centrado no bucket de cavitação
do perfil. A bossa laminar e a localização do ponto de pressão mínima, em função do ângulo de
ataque α, para os dois perfis, estão representados na figura 1.2.
Cp (mínimo)
α
0 1 2 3 4 5-12
-10
-8
-6
-4
-2
0
2
4
6
Projecto r/R=0,518
Projecto r/R=0,962
r/R = 0,962r/R = 0,518
α
x/c
(%)
-20 -10 0 10 200
10
20
30
40
50
60
70
80
90
100
r/R=0,518r/R=0,962
Fig. 1.2: Características aerodinâmicas dos perfis”mãe”:(a) coeficiente de pressão mínimo em função do ângulo
de ataque α, (b) localização do ponto de pressão mínima em função do ângulo de ataque α.
A geometria final da pá foi obtida posicionando os perfis mãe de modo que seus
centros da gravidade fossem coincidentes com o mesmo eixo e de direcção radial.
Posteriormente foram definidos mais dez perfis para raios compreendidos entre os perfis “mãe”
e com centros de gravidade localizados no mesmo eixo. A respectiva corda foi determinada de
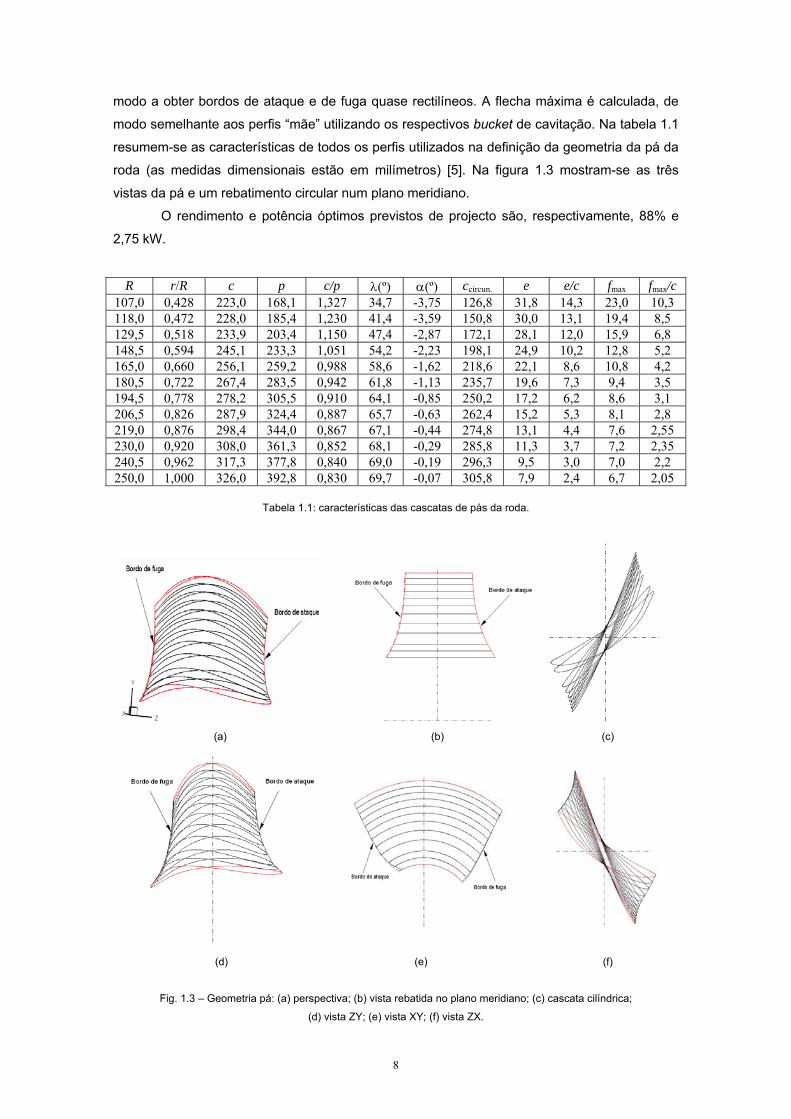
8
modo a obter bordos de ataque e de fuga quase rectilíneos. A flecha máxima é calculada, de
modo semelhante aos perfis “mãe” utilizando os respectivos bucket de cavitação. Na tabela 1.1
resumem-se as características de todos os perfis utilizados na definição da geometria da pá da
roda (as medidas dimensionais estão em milímetros) [5]. Na figura 1.3 mostram-se as três
vistas da pá e um rebatimento circular num plano meridiano.
O rendimento e potência óptimos previstos de projecto são, respectivamente, 88% e
2,75 kW.
Tabela 1.1: características das cascatas de pás da roda.
(a) (b) (c)
(d) (e) (f)
Fig. 1.3 – Geometria pá: (a) perspectiva; (b) vista rebatida no plano meridiano; (c) cascata cilíndrica;
(d) vista ZY; (e) vista XY; (f) vista ZX.
R r/R c p c/p λ(º) α(º) ccircun. e e/c fmax fmax/c 107,0 0,428 223,0 168,1 1,327 34,7 -3,75 126,8 31,8 14,3 23,0 10,3 118,0 0,472 228,0 185,4 1,230 41,4 -3,59 150,8 30,0 13,1 19,4 8,5 129,5 0,518 233,9 203,4 1,150 47,4 -2,87 172,1 28,1 12,0 15,9 6,8 148,5 0,594 245,1 233,3 1,051 54,2 -2,23 198,1 24,9 10,2 12,8 5,2 165,0 0,660 256,1 259,2 0,988 58,6 -1,62 218,6 22,1 8,6 10,8 4,2 180,5 0,722 267,4 283,5 0,942 61,8 -1,13 235,7 19,6 7,3 9,4 3,5 194,5 0,778 278,2 305,5 0,910 64,1 -0,85 250,2 17,2 6,2 8,6 3,1 206,5 0,826 287,9 324,4 0,887 65,7 -0,63 262,4 15,2 5,3 8,1 2,8 219,0 0,876 298,4 344,0 0,867 67,1 -0,44 274,8 13,1 4,4 7,6 2,55 230,0 0,920 308,0 361,3 0,852 68,1 -0,29 285,8 11,3 3,7 7,2 2,35 240,5 0,962 317,3 377,8 0,840 69,0 -0,19 296,3 9,5 3,0 7,0 2,2 250,0 1,000 326,0 392,8 0,830 69,7 -0,07 305,8 7,9 2,4 6,7 2,05
9
3 – Técnicas numéricas de análise
3.1 - Método Bidimensional (Método dos Painéis)
A utilização de métodos de cálculo numérico na análise de geometrias complexas
permite avaliar os métodos de projecto utilizados, geralmente mais simples, bem como estimar
os erros cometidos pelas simplificações utilizadas.
No estudo bidimensional efectuado foi utilizado o método dos painéis acoplado com um
cálculo de camada limite de acordo com a teoria de interacção fraca viscosa-invíscida. A
solução do escoamento invíscido é baseado na solução da equação de Laplace usando
distribuições superficiais de fontes. O perfil é discretizado por painéis planos com distribuições
superficiais constantes de fontes em cada painel – “distribuições de singularidades” [19]. A
intensidade da distribuição de fontes é determinada pela condição fronteira aplicada no ponto
médio de cada painel. A componente da velocidade normal no painel é igualada a zero para o
escoamento puramente potencial, num primeiro cálculo, mas considerando o efeito de camada
limite, estas são iguais à velocidade de transpiração [2]. Para se satisfazer a condição de Kutta,
segundo a qual a velocidade no bordo de fuga tem de ser finita, é sobreposto um escoamento
circulatório, introduzindo uma distribuição de vórtices ao longo da linha média. A intensidade
dos vórtices varia, com a distância ao bordo de fuga, ao longo da linha média, e é dada por: 4,0
0 msγγ = , (3.1)
onde, γ é a intensidade do vórtice, 0γ é uma constante a ser determinada pela condição de
Kutta e mS é a distância do ponto médio do painel ao bordo de fuga [2]. A camada limite
laminar é calculada pelo método integral de Thwaites. A região do ponto de estagnação é
calculada pela solução exacta de Hiemenz para um escoamento de ponto de estagnação plano
[20]. Quando se prevê separação da camada limite laminar, é assumido que a transição ocorre
no ponto de separação.
A transição da camada limite é condensada num ponto e é calculada por uma
expressão empírica que pode ser consultada em [20].
Para a solução da região de escoamento viscoso é desprezada a influência da esteira
e, portanto, apenas é incluída a região laminar e a camada limite turbulenta [2].
A compatibilização da solução invíscida com a viscosa é obtida por cálculo iterativo
através da teoria da “interacção fraca”. O cálculo de escoamento potencial determina a
velocidade exterior imposta na camada limite. As condições de fronteira do escoamento
potencial são obtidas pelo cálculo da camada limite. As condições de fronteira do escoamento
potencial são aplicadas aos pontos médios dos painéis do perfil. A velocidade normal em cada
10
um desses pontos é dada pela velocidade de transpiração, que depende da espessura de
deslocamento, *δ , da camada limite:
( )*δ∞= Udxdvw , (3.2)
onde, ∞U é a velocidade exterior [2]. O ciclo continua até ser obtida a convergência
especificada.
3.2 - Método Tridimensional
Os códigos de mecânica dos fluidos computacional têm vindo a tornar-se num
componente essencial no projecto de alguns produtos e processos industriais. Actualmente,
estes, podem ser extremamente poderosos, mas a sua utilização ainda requer ao utilizador um
alto nível de experiência e conhecimento para se poder obter resultados significativos em
situações complexas, dada a complexidade subjacente à descrição dos escoamentos de
fluidos.
Neste estudo, a solução do escoamento foi obtida através do código FLUENT 6.2 [3],
que utiliza uma discretização numérica chamada método dos volumes finitos. Os códigos de
CFD contêm algoritmos numéricos que resolvem um conjunto de equações, que no caso do
FLUENT, para este estudo, são as equações de Navier-Stokes em valor médio (média
temporal de Reynolds).
As variáveis são definidas no centro de cada volume de controlo. A turbulência é
modelada por modelos de viscosidade turbulenta: o modelo de turbulência k-ε padrão [21] (i.e.
para altos números de Reynolds), o k-ω proposto por Wilcox [22] e o modelo Spalart – Allmaras
[12].
Para se tomar as melhores decisões, ao se utilizar um código de CFD, é necessário
alguma experiência e sensibilidade de forma reduzir a complexidade mantendo as
características do problema. Uma boa compreensão da solução do algoritmo numérico é
também crucial [23].
De forma a manter a mesma nomenclatura e coerência de apresentação com o código,
as secções seguintes usam como principal referência o manual do FLUENT [3].

11
3.2.1 – Equações de Reynolds (introdução da média)
Nos valores médios de Reynolds, as variáveis instantâneas do escoamento são
decompostas num valor médio mais uma componente de flutuação. Assim, a título de exemplo,
as componentes da velocidade, ficam:
′+= iii uuu~ , (3.3)
onde, iu e ′iu são as componentes da velocidade média e a respectiva flutuação ( i =1,2,3).
Assim, como para a pressão e outras quantidades escalares:
φφφ ′+=~ . (3.4)
As equações (3.3) e (3.4) definem as médias de Reynolds (“Reynolds - averaged”) e
usa-se, daqui em diante, ii uu = . Substituindo-as nas equações instantâneas e aplicando a
média temporal às equações da continuidade e do momento (equações de Navier-Stokes),
obtém-se, para escoamento em regime permanente:
( ) 0=∂∂
ii
ux
ρ , (3.5)
( ) ( ) ( )jijl
lij
i
j
j
i
jiji
ji uu
xxu
xu
xu
xxpuu
xu
t′′−
∂∂
+⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
−∂
∂+
∂∂
∂∂
+∂∂
−=∂∂
+∂∂ ρδμρρ
32 . (3.6)
Considerando o escoamento incompressível, as equações anteriores ficam:
0=∂∂
i
i
xu , (3.7)
( ) ( )jiji
j
j
i
jij
jii uuxx
uxu
xxp
xuu
tu ′′−
∂∂
+⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛
∂
∂+
∂∂
∂∂
+∂∂
−=∂
∂+
∂∂
ρμρρ . (3.8)
As equações (3.7) e (3.8) são chamadas as equações Reynolds-Averaged
Navier-Stokes – (RANS) e têm a mesma forma geral das equações instantâneas de
Navier-Stokes, mas com as variáveis representadas em valor médio. A consequência desta
aproximação é o aparecimento de novos termos representando os efeitos de turbulência. Estas
tensões de Reynolds, ji uu ′′− ρ , podem ser representadas por um aumento de viscosidade, de
forma a fechar a equação (3.8). Boussinesq propôs a seguinte aproximação [7]:
iji
it
i
j
j
itji x
ukxu
xuuu δμρμρ ⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
+−⎟⎟⎠
⎞⎜⎜⎝
⎛
∂
∂+
∂∂
=′′−32 . (3.9)
Para o caso de escoamento incompressível, fica:
kxu
xu
uu iji
j
j
itji ρδμρ
32
−⎟⎟⎠
⎞⎜⎜⎝
⎛
∂
∂+
∂∂
=′′− , (3.10)
onde, tμ é a viscosidade turbulenta e k a energia cinética turbulenta. Esta aproximação é
utilizada para os modelos “Spalart-Allmaras”, “k-ε” e “k-ω”, usados no estudo tridimensional. No

12
caso do modelo “Spalart-Allmaras”, apenas uma equação de transporte adicional é resolvida,
enquanto nos modelos “k-ε” e “k-ω” são resolvidas duas equações de transporte adicionais
para a energia cinética turbulenta, k , e para a taxa de dissipação de turbulência, ε , ou a taxa
de dissipação específica, ω e tμ é calculado como função de k e ε .
As equações da conservação (3.7 e 3.8) atrás referidas são explicadas mais
detalhadamente nas duas subsecções seguintes.
3.2.1.1 – Conservação da Massa
A lei da conservação para uma propriedade traduz a taxa de variação para uma
quantidade dessa propriedade, que para a massa, não é criada nem destruída, pode ser escrita
como:
( ) 0=⋅∇+∂∂ v
tr
ρρ (3.11)
onde, vr
é o vector velocidade e ρ a massa específica.
Para escoamento incompressível, a equação de estado, fica:
.const=ρ (3.12)
E a equação da continuidade toma a forma:
00. =∂∂
+∂
∂+
∂∂
⇔=∇z
uy
ux
uv zyxr. (3.13)
3.2.1.2 – Balanço da Quantidade de Movimento
Considerando o fluido newtoniano, a equação do balanço de quantidade de
movimento, para um sistema de coordenadas inercial, pode ser escrita da seguinte forma:
( ) ( ) ⎟⎠⎞⎜
⎝⎛⋅∇+−∇=⋅∇+
∂∂ τρρ pvvvt
rrr, (3.14)
onde, p é a pressão estática, a que se subtraiu a componente hidrostática, e τ é o tensor das
tensões. O tensor das tensões é dado por:
( ) ⎥⎦⎤
⎢⎣⎡ ⋅∇−∇+∇= Ivvv T rrr
32μτ , (3.15)
onde, μ é a viscosidade dinâmica, I é o tensor unitário, e pela equação (3.13), toma a forma:
( )[ ]Tvvrr
∇+∇= μτ . (3.16)
Substituindo esta equação na equação da conservação do momento linear, depois de
alguma manipulação matemática, obtém-se, para escoamento incompressível:
vpvvtv rrrr
2∇+−∇=∇⋅+∂∂ μρρ . (3.17)

13
Esta equação corresponde à lei da conservação do momento linear e deve ser
satisfeita em todos e cada um dos pontos do escoamento. A força de inércia é, obviamente,
uma quantidade vectorial, que no caso do código FLUENT, dá origens a três equações
correspondentes às três componentes cartesianas.
O escoamento que se pretende estudar é turbulento. Para fechar o sistema de
equações com os novos termos representando os efeitos de turbulência (as tensões de
Reynolds), o FLUENT inclui vários modelos de turbulência alternativos. Para este estudo,
foram utilizados os modelos “Spalart-Allmaras”, “k-ε standard” e “k-ω” proposto por Wilcox.
3.2.2 – Modelos de Turbulência
Os escoamentos turbulentos são caracterizados por flutuações nos campos de
velocidades. Dado que estas flutuações podem ser de escalas e de frequências muito distintas,
são demasiado exigentes, computacionalmente, para serem simuladas directamente.
3.2.2.1 – Modelo Spalart-Allmaras
A variável transportada no modelo Spalart-Allmaras, υ~ , é idêntica à viscosidade
turbulenta cinemática excepto na região próxima das paredes sólidas afectadas pelos efeitos
viscosos da sub-camada laminar. A equação de transporte para υ~ , é:
( ) ( ) ( ) υυ
υυρυυρμ
συρνρ Υ−
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
+⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
∂∂
+∂∂
+=∂∂
+∂∂
2
2~
~~~1~~j
bjj
ii x
Cxx
Guxt
(3.18)
onde, υG é a produção de viscosidade turbulenta e υΥ é a dissipação da viscosidade
turbulenta que ocorre na vizinhança das paredes sólidas. Os valores de v~σ e 2bC são
constantes e υ é a viscosidade cinemática molecular.
A viscosidade turbulenta é calculada por:
1~υυρμ ft = , (3.19)
onde, a função de amortecimento é dada por:
31
3
3
1υ
υχ
χC
f+
= , (3.20)
e
υυχ~
≡ . (3.21)
O termo da produção de viscosidade turbulenta, υG , é modelado por:
υρυ~~
1 SCG b= , (3.22)

14
onde
222
~~υ
κυ fd
SS +≡ , (3.23)
com, κ , a constante de Von Kárman e,
1
2 11
υυ χ
χf
f+
−= . (3.24)
O valor de 1bC é constante, d é a distância à parede e S é uma medida escalar do
tensor de deformação.
Tendo em conta a vorticidade e a deformação causada pela produção de turbulência,
temos que:
( )ijijprodijc SCS Ω−+Ω= ,0min , (3.25)
com,
ijijij ΩΩ≡Ω 2 , 0.2=prodC , ijijij SSS 2≡ ,
em que, ijΩ é a vorticidade e ijS a taxa de deformação, e são definidas como:
⎟⎟⎠
⎞⎜⎜⎝
⎛
∂
∂−
∂∂
=Ωi
j
j
iij x
uxu
21 , (3.26)
⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
+∂
∂=
j
i
i
jij x
uxu
S21 . (3.27)
O último termo da equação (3.25) não pertence ao modelo original e tem como
intenção corrigir os efeitos de vorticidade axial.
O termo de dissipação é modelado da seguinte forma:
2
1
~⎟⎠
⎞⎜⎝
⎛=Υd
fC υρ ωωυ , (3.28)
onde
6/1
63
6
631
⎥⎥⎦
⎤
⎢⎢⎣
⎡
+
+=
ω
ωω Cg
Cgf , (3.29)
( )rrCrg −+= 62ω , (3.30)
22~
~
dSr
κυ
≡ , (3.31)
Os valores de 1ωC , 2ωC e 3ωC são constantes e S~ é determinado pela equação (3.23).
As constantes do modelo têm por defeito, os seguintes valores:
1355,01 =bC , 622,02 =bC , 1,7~ =υσ ,
( )υ
ω σκ ~
221
11 bb CC
C+
+= , 3,02 =ωC , 0,23 =ωC , 4187,0=κ .

15
3.2.2.2 – Modelo k-ε Padrão
O modelo k-ε padrão é baseado nas equações de transporte da energia cinética
turbulenta, k, e da sua taxa de dissipação, ε. Este modelo assume que o escoamento é
completamente turbulento e que os efeitos da viscosidade molecular são desprezáveis face à
difusão turbulenta.
A energia cinética turbulenta, k, e a taxa de dissipação, ε, para escoamento
incompressível, são obtidas a partir das seguintes equações de transporte:
( ) ( ) ρεσμ
μρρ −+⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛+
∂∂
=∂∂
+∂∂
kjk
t
ji
iG
xk
xku
xk
t, (3.32)
e
( )k
CGk
Cxx
uxt k
j
t
ji
i
2
21ερεε
σμ
μερερ εεε
−+⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛+
∂∂
=∂∂
+∂∂ , (3.33)
onde, kG representa a geração de energia cinética turbulenta devido aos gradientes de
velocidade média e ε1C , ε2C e ε3C são constantes. As constantes kσ e εσ são os números
de Prandtl para k e ε.
Neste modelo, a viscosidade turbulenta, tμ , é calculada, combinando k e ε, pela
seguinte expressão:
ε
ρμ μ
2kCt = , (3.34)
As constantes do modelo k-ε, têm por defeito, os seguintes valores:
44,11 =εC , 92,12 =εC , 09,0=μC , 0,1=kσ , 3,1=εσ .
O termo kG na equação (3.32), que representa a geração de energia cinética
turbulenta, e pode ser definido como:
i
jjik x
uuuG
∂
∂′′−= ρ . (3.35)
Para avaliar kG de forma consistente com a hipótese de Boussinesq,
2SG tk μ= , (3.36)
onde, S é o modulo da taxa de deformação e definida por:
ijijSSS 2≡ . (3.37)
3.2.2.3 – Modelo k-ω Padrão
O modelo k-ω é um modelo baseado nas equações de transporte da energia cinética
turbulenta, k, e da taxa de dissipação especifica, ω.

16
A energia cinética turbulenta, k, e a taxa de dissipação especifica, ω, para escoamento
incompressível, são obtidas a partir das seguintes equações de transporte:
( ) kkj
kj
ii
Gxk
xku
xtk
Υ−+⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
Γ∂∂
=∂∂
+∂∂ ρρ , (3.38)
e
( ) ωωωεωρωρ Υ−+⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
Γ∂∂
=∂∂
+∂∂ G
xxu
xt jji
i. (3.39)
Nestas equações, kG representa a geração de energia cinética turbulenta devido aos
gradientes de velocidade média e ωG representa a geração de ω . As variáveis kΓ e ωΓ
representam a difusão efectiva de k e ω, respectivamente.
Os termos de difusão de k e ω para este modelo são dados por:
k
tk σ
μμ +=Γ , (3.40)
ω
ω σμ
μ t+=Γ , (3.41)
onde, kσ e εσ são os números de Prandtl para k e ω, respectivamente. A viscosidade
turbulenta, tμ , é calculada, combinando k e ω, pela seguinte expressão:
ωρμ k
t = . (3.42)
O termo kG representa a produção de energia cinética turbulenta. Pela equação
exacta de transporte de k , este termo pode ser definido como:
i
jjik x
uuuG
∂
∂′′−= ρ . (3.43)
Para avaliar kG de forma consistente com a hipótese de Boussinesq,
2SG tk μ= , (3.44)
onde, S é o modulo da taxa de deformação e definida da mesma forma que para o modelo k-ε
(equação 3.37).
A produção de ω é dada por:
kGk
G ωω = , (3.45)
onde, kG é dado pela equação (3.44).
A dissipação de energia cinética turbulenta, para escoamentos incompressíveis, é dada
por:
ωρβ β kfk*∞=Υ , (3.46)

17
onde
⎪⎩
⎪⎨
⎧
>+
+
≤
=0
40016801
01
2
2*
kk
k
k
fχ
χχ
χ
β (3.47)
e
jj
k xxk
∂∂
∂∂
≡ω
ωχ 3
1 . (3.48)
A dissipação de ω é dada por:
2ωρβ βω fi=Υ , (3.49)
onde
ω
ωβ χ
χ801701
++
=f , (3.50)
( )3*ωβ
χω∞
ΩΩ= kijkij S
, (3.51)
⎟⎟⎠
⎞⎜⎜⎝
⎛
∂
∂−
∂∂
=Ωi
j
j
iij x
uxu
21 . (3.52)
As constantes do modelo k-ω, têm por defeito, os seguintes valores:
09,0* =∞β , 072,0=iβ , 0,2=kσ , 0,2=ωσ
3.2.3 – Condições fronteira
As condições de fronteira especificam o valor das variáveis nas fronteiras do domínio
físico em estudo. No âmbito das simulações efectuadas existem quatro tipos de condições de
fronteira: entrada, saída, periódicas e superfícies sólidas.
3.2.3.1 – Superfície de Entrada
Dos diferentes tipos disponíveis no código FLUENT, na fronteira de entrada, optou-se
por definir a velocidade do escoamento. Esta condição de fronteira é identificada no código
FLUENT como Velocity Inlet. As pressões totais (ou de estagnação) do escoamento não estão
fixas e podem tomar os valores necessários para garantir a distribuição de velocidade imposta.
A turbulência na secção de entrada é modelada a partir da intensidade de turbulência,
I , e do diâmetro hidráulico, HD .
18
O FLUENT utiliza os dados introduzidos nesta fronteira para calcular o caudal que
atravessa o domínio e para calcular os fluxos de quantidade de movimento e energia a partir da
entrada.
3.2.3.2 – Superfície de Saída
Na fronteira de saída do domínio utilizou-se a condição de saída livre, designada no
código como Outflow, que corresponde a efectuar uma extrapolação do valor das variáveis de
grau zero, a partir do interior do domínio, sem ser necessário impor qualquer valor a qualquer
variável. A extrapolação actualiza, ainda, o perfil de velocidades de forma a garantir a
conservação da massa.
3.2.3.3 – Superfícies Periódicas
Nas superfícies periódicas as faces dos elementos são tratadas como faces interiores
do domínio. O FLUENT iguala as propriedades do escoamento nas células de uma fronteira
periodica às propriedades das células vizinhas do plano periódico oposto.
3.2.3.4 – Superfícies Sólidas
Os escoamentos turbulentos são significativamente afectados pela presença de
paredes. O campo de velocidades é afectado com a condição de não escorregamento, que tem
que ser satisfeito nas paredes.
O modelo k-ε incluído no FLUENT só é válido para escoamentos turbulentos afastados
das paredes, ou seja, aplica funções parede, contudo é possível adaptar o modelo para
resolver escoamentos próximos das paredes. O modelo Spalart-Allmaras e o k-ω foram
modelados de forma a resolver, para além da camada da parede (região logarítmica), a
sub-camada viscosa. Para cada modelo de turbulência é necessário implementar condições de
fronteira para as paredes sólidas, que diferem de modelo para modelo.
3.2.3.4.1 – Modelo Spalart-Allmaras
Para o modelo Spalart-Allmaras, a viscosidade cinemática turbulenta modificada, υ~ ,
nas paredes, é igualada a zero. Para resolver a sub-camada linear, as tensões de corte na
parede são obtidas a partir da seguinte relação:
μ
ρ τ
τ
yuuuU ==* , (3.53)

19
equivalente a,
yU
yu
yw Δ
Δ≅⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
==
μμτ0
(3.54)
onde, u é a componente da velocidade paralela à parede, τu é a velocidade de corte (fricção)
e y é a distância à parede.
3.2.3.4.2 – Modelo k-ε Padrão
As funções parede foram modeladas semi-empiricamente e não resolvem a
sub-camada viscosa. Servem como ligação entre a parede e a região de escoamento
completamente turbulento.
As funções parede estão activas por defeito no modelo k-ε. A lei da parede para um
campo de velocidades médio é dada por:
( )** ln1 EyUκ
= , (3.55)
onde
ρτ
μ
w
PP kCUU
2/14/1* ≡ , (3.56)
μ
ρ μ PP ykCy
2/14/1* ≡ , (3.57)
com,
κ = constante de Von Kármán (=0,4187),
E = constante empírica (=9,793),
PU = velocidade média no ponto P,
Pk = energia cinética turbulenta no ponto P,
Py = distância do ponto P à parede,
μ = viscosidade dinâmica do fluido.
Para evitar velocidades de corte nulas, aquando da ocorrência de separação, a
equação (3.55) utiliza a energia cinética turbulenta para determinar a velocidade de corte. Esta
condição permite garantir valores suficientemente altos de *y de forma a poder aplicar a lei
logarítmica.
A lei logarítmica é valida para δ15,030 * << y , em que δ é a espessura da camada
limite, e portanto, dependente do número de Reynolds. No FLUENT, a lei logarítmica é
aplicada quando 225,11* >y . A variáveis +y e *y têm valores comparáveis quando a primeira
célula está localizada na região logarítmica.
20
A equação de transporte de energia cinética turbulenta, k , é resolvida em todo o
domínio, incluindo nas células adjacentes à parede. A condição de fronteira para k imposta na
parede é:
0=∂∂nk , (3.58)
onde, n é a coordenada local paralela à parede.
A produção de energia cinética, kG , e a sua taxa de dissipação, ε, nas células
adjacentes à parede, que são os termos fonte na equação de transporte de k , são calculadas
com base na hipótese de equilíbrio local. Assim, assume-se que os valores da produção de k
e da sua taxa de dissipação são iguais no volume de controlo adjacente à parede e, portanto,
podem ser calculadas pelas seguintes expressões:
PP
wwwk ykCy
UG 2/14/1μκρτ
ττ =∂∂
≈ , (3.59)
P
PP y
kCκ
ε μ2/34/3
= . (3.60)
Desta forma, nas células adjacentes à parede, a equação de transporte de ε não é
resolvida, sendo a taxa de dissipação de energia cinética turbulenta calculada pela equação
(3.60).
As funções de parede satisfazem, com razoável precisão, a maioria dos escoamentos
para altos valores de Reynolds, contudo, o refinamento da malha estará subjacente a esta
aproximação. O FLUENT disponibiliza métodos de tratamento para regiões de aproximação à
parede, combinando o modelo de duas camadas com as leis da parede “automáticas”, ou seja,
para 0>+y .
No modelo de duas camadas, o domínio é subdividido na região da sub-camada
laminar e na região de completamente turbulento. Para a região de escoamento
completamente desenvolvido, são resolvidas as equações de transporte de k e ε como
explicado no tópico 3.2.2. Para a região da sub-camada, é aplicado o modelo de uma equação
em que a viscosidade turbulenta, tμ , é calculada por:
kCt μμρμ l= , (3.61)
onde, o comprimento de mistura de μ , μl , é dado por:
( )μμ
Ayeyc /Re1 −−= ll . (3.62)
Para a região da sub-camada, ε passa a ser calculado por:
ε
εl
2/3k= , (3.63)
onde, o comprimento de mistura de ε, εl , é dado por:
( )εε
Ayeyc /Re1 −−= ll . (3.64)

21
As constantes são dadas por: 4/3−= μκCcl , 70=μA , lcA 2=ε .
As leis da parede “automáticas” combinam a sub-camada linear com a lei logarítmica
usando a seguinte função:
+Γ+Γ+ += turblam ueueu1
, (3.65)
onde, a função de combinação é dada por:
( )+
+
+−=Γ
byya
1
4
, (3.66)
com 01,0=a e 5=b .
Similarmente, a equação geral para a derivada +
+
dydu é:
+
+Γ
+
+Γ
+
+
+=dy
due
dydu
edydu turblam
1
. (3.67)
Esta aproximação permite que a lei logarítmica seja facilmente modificada e alargada
de forma a garantir um correcto comportamento para variações de valores de +y , assim como,
uma representação razoável dos perfis de velocidade em casos em que os valores de +y
caem dentro da região tampão ( )103 << +y .
3.2.3.4.3 – Modelo k-ω
No modelo k-ω, a condição de fronteira para a parede, para a equação de k , é tratada
da mesma forma que no modelo k-ε para a resolução da camada linear.
No código FLUENT, o valor de ω na parede é definido como:
( ) += ωμ
ρω τ
2uw . (3.68)
O valor assimptótico de +ω na sub-camada linear é dado por:
( ) ⎟⎟
⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
+
++2
6,minyi
wβ
ωω , (3.69)
onde
⎪⎪
⎩
⎪⎪
⎨
⎧
≥
<⎟⎟⎠
⎞⎜⎜⎝
⎛
=+
+
++
+
25100
25502
Ss
SS
w
kk
kkω , (3.70)

22
com
⎟⎟⎠
⎞⎜⎜⎝
⎛=+
μρ τuk
k SS ,0.1max (3.71)
e Sk é a rugosidade.
23
4 - Resultados
4.1 - Método Bidimensional
Os doze perfis utilizados na definição da geometria da pá da roda (em anexo 1) foram
discretizados com 121 painéis no intradorso e extradorso, respectivamente, obedecendo a uma
distribuição dada pela função co-seno ao longo da corda. Os cálculos foram efectuados para
um número de Reynolds baseado na seguinte expressão:
υcU∞=Re , (4.1)
onde, ∞U é a velocidade do escoamento, c é a corda do perfil e ν é a viscosidade cinemática
do ar à temperatura de 20º C. O número de Reynolds juntamente com a razão corda/passo
(c/p), o ângulo de calagem da cascata, λ, e o ângulo de ataque, α , são as variáveis de entrada
do código bidimensional utilizado e, excepto para os ângulos de ataque, foram apenas
simulados valores de projecto. No caso do ângulo de ataque, para cada perfil, foi simulado o
valor de projecto e uma gama de 0º a 4º, com variações de meio em meio grau. A corda do
perfil, c, a razão corda/passo (c/p), o ângulo de calagem da cascata, λ, e o ângulos de ataque,
α , de projecto, respectivamente, para cada perfil estão disponíveis no anexo 2. Para cada
ângulo de ataque é efectuada uma primeira iteração para escoamento puramente potencial, e
considerando o efeito camada limite são efectuadas mais vinte iterações, caso o cálculo
chegue ao fim, ou seja, quando não ocorre separação da camada limite turbulenta.
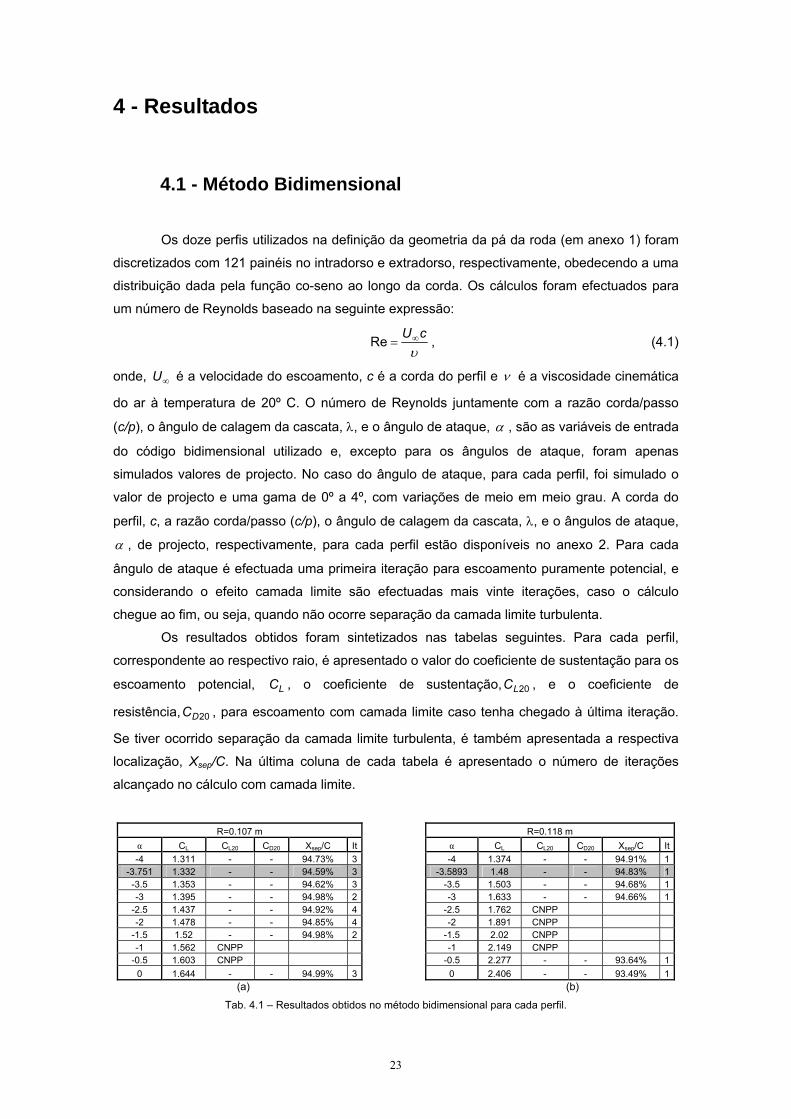
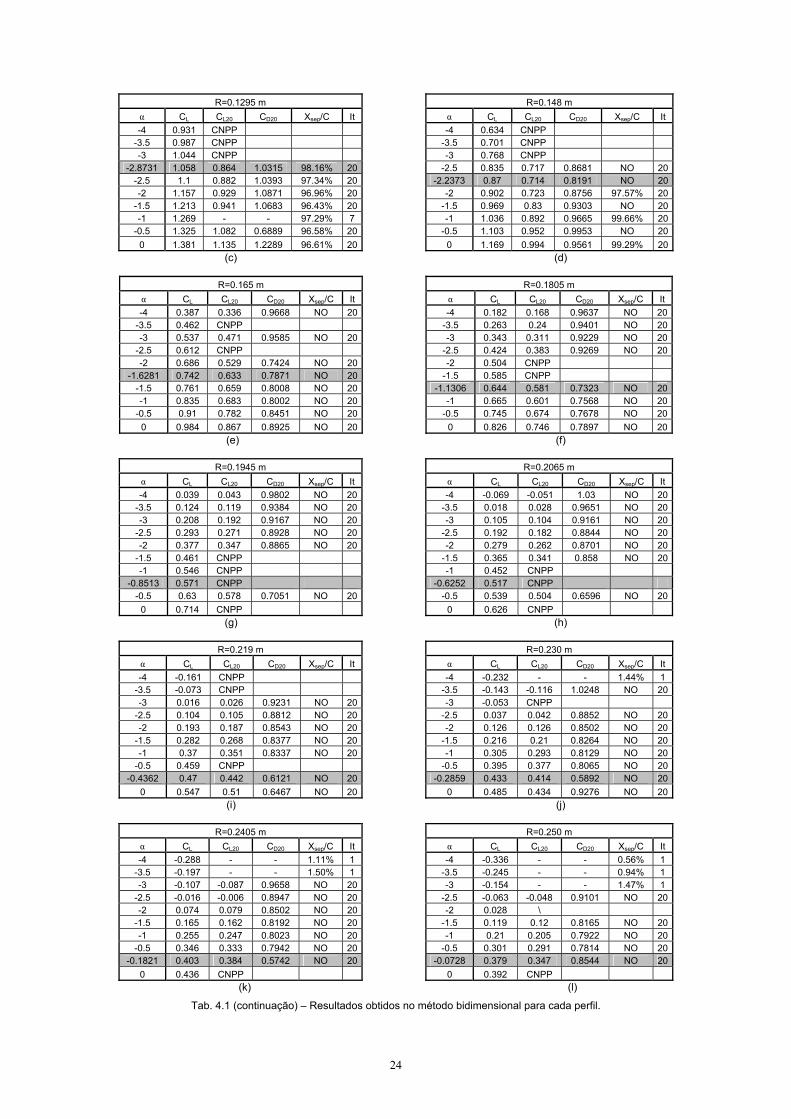
Os resultados obtidos foram sintetizados nas tabelas seguintes. Para cada perfil,
correspondente ao respectivo raio, é apresentado o valor do coeficiente de sustentação para os
escoamento potencial, LC , o coeficiente de sustentação, 20LC , e o coeficiente de
resistência, 20DC , para escoamento com camada limite caso tenha chegado à última iteração.
Se tiver ocorrido separação da camada limite turbulenta, é também apresentada a respectiva
localização, Xsep/C. Na última coluna de cada tabela é apresentado o número de iterações
alcançado no cálculo com camada limite.
R=0.107 m R=0.118 m α CL CL20 CD20 Xsep/C It α CL CL20 CD20 Xsep/C It-4 1.311 - - 94.73% 3 -4 1.374 - - 94.91% 1
-3.751 1.332 - - 94.59% 3 -3.5893 1.48 - - 94.83% 1-3.5 1.353 - - 94.62% 3 -3.5 1.503 - - 94.68% 1-3 1.395 - - 94.98% 2 -3 1.633 - - 94.66% 1
-2.5 1.437 - - 94.92% 4 -2.5 1.762 CNPP -2 1.478 - - 94.85% 4 -2 1.891 CNPP
-1.5 1.52 - - 94.98% 2 -1.5 2.02 CNPP -1 1.562 CNPP -1 2.149 CNPP
-0.5 1.603 CNPP -0.5 2.277 - - 93.64% 10 1.644 - - 94.99% 3 0 2.406 - - 93.49% 1
(a) (b)
Tab. 4.1 – Resultados obtidos no método bidimensional para cada perfil.
24
R=0.1295 m R=0.148 m α CL CL20 CD20 Xsep/C It α CL CL20 CD20 Xsep/C It -4 0.931 CNPP -4 0.634 CNPP
-3.5 0.987 CNPP -3.5 0.701 CNPP -3 1.044 CNPP -3 0.768 CNPP
-2.8731 1.058 0.864 1.0315 98.16% 20 -2.5 0.835 0.717 0.8681 NO 20-2.5 1.1 0.882 1.0393 97.34% 20 -2.2373 0.87 0.714 0.8191 NO 20-2 1.157 0.929 1.0871 96.96% 20 -2 0.902 0.723 0.8756 97.57% 20
-1.5 1.213 0.941 1.0683 96.43% 20 -1.5 0.969 0.83 0.9303 NO 20-1 1.269 - - 97.29% 7 -1 1.036 0.892 0.9665 99.66% 20
-0.5 1.325 1.082 0.6889 96.58% 20 -0.5 1.103 0.952 0.9953 NO 200 1.381 1.135 1.2289 96.61% 20 0 1.169 0.994 0.9561 99.29% 20
(c) (d)
R=0.165 m R=0.1805 m α CL CL20 CD20 Xsep/C It α CL CL20 CD20 Xsep/C It -4 0.387 0.336 0.9668 NO 20 -4 0.182 0.168 0.9637 NO 20
-3.5 0.462 CNPP -3.5 0.263 0.24 0.9401 NO 20-3 0.537 0.471 0.9585 NO 20 -3 0.343 0.311 0.9229 NO 20
-2.5 0.612 CNPP -2.5 0.424 0.383 0.9269 NO 20-2 0.686 0.529 0.7424 NO 20 -2 0.504 CNPP
-1.6281 0.742 0.633 0.7871 NO 20 -1.5 0.585 CNPP -1.5 0.761 0.659 0.8008 NO 20 -1.1306 0.644 0.581 0.7323 NO 20-1 0.835 0.683 0.8002 NO 20 -1 0.665 0.601 0.7568 NO 20
-0.5 0.91 0.782 0.8451 NO 20 -0.5 0.745 0.674 0.7678 NO 200 0.984 0.867 0.8925 NO 20 0 0.826 0.746 0.7897 NO 20
(e) (f)
R=0.1945 m R=0.2065 m α CL CL20 CD20 Xsep/C It α CL CL20 CD20 Xsep/C It -4 0.039 0.043 0.9802 NO 20 -4 -0.069 -0.051 1.03 NO 20
-3.5 0.124 0.119 0.9384 NO 20 -3.5 0.018 0.028 0.9651 NO 20-3 0.208 0.192 0.9167 NO 20 -3 0.105 0.104 0.9161 NO 20
-2.5 0.293 0.271 0.8928 NO 20 -2.5 0.192 0.182 0.8844 NO 20-2 0.377 0.347 0.8865 NO 20 -2 0.279 0.262 0.8701 NO 20
-1.5 0.461 CNPP -1.5 0.365 0.341 0.858 NO 20-1 0.546 CNPP -1 0.452 CNPP
-0.8513 0.571 CNPP -0.6252 0.517 CNPP -0.5 0.63 0.578 0.7051 NO 20 -0.5 0.539 0.504 0.6596 NO 20
0 0.714 CNPP 0 0.626 CNPP (g) (h)
R=0.219 m R=0.230 m
α CL CL20 CD20 Xsep/C It α CL CL20 CD20 Xsep/C It -4 -0.161 CNPP -4 -0.232 - - 1.44% 1
-3.5 -0.073 CNPP -3.5 -0.143 -0.116 1.0248 NO 20-3 0.016 0.026 0.9231 NO 20 -3 -0.053 CNPP
-2.5 0.104 0.105 0.8812 NO 20 -2.5 0.037 0.042 0.8852 NO 20-2 0.193 0.187 0.8543 NO 20 -2 0.126 0.126 0.8502 NO 20
-1.5 0.282 0.268 0.8377 NO 20 -1.5 0.216 0.21 0.8264 NO 20-1 0.37 0.351 0.8337 NO 20 -1 0.305 0.293 0.8129 NO 20
-0.5 0.459 CNPP -0.5 0.395 0.377 0.8065 NO 20-0.4362 0.47 0.442 0.6121 NO 20 -0.2859 0.433 0.414 0.5892 NO 20
0 0.547 0.51 0.6467 NO 20 0 0.485 0.434 0.9276 NO 20(i) (j)
R=0.2405 m R=0.250 m
α CL CL20 CD20 Xsep/C It α CL CL20 CD20 Xsep/C It -4 -0.288 - - 1.11% 1 -4 -0.336 - - 0.56% 1
-3.5 -0.197 - - 1.50% 1 -3.5 -0.245 - - 0.94% 1 -3 -0.107 -0.087 0.9658 NO 20 -3 -0.154 - - 1.47% 1
-2.5 -0.016 -0.006 0.8947 NO 20 -2.5 -0.063 -0.048 0.9101 NO 20-2 0.074 0.079 0.8502 NO 20 -2 0.028 \
-1.5 0.165 0.162 0.8192 NO 20 -1.5 0.119 0.12 0.8165 NO 20-1 0.255 0.247 0.8023 NO 20 -1 0.21 0.205 0.7922 NO 20
-0.5 0.346 0.333 0.7942 NO 20 -0.5 0.301 0.291 0.7814 NO 20-0.1821 0.403 0.384 0.5742 NO 20 -0.0728 0.379 0.347 0.8544 NO 20
0 0.436 CNPP 0 0.392 CNPP (k) (l)
Tab. 4.1 (continuação) – Resultados obtidos no método bidimensional para cada perfil.
25
O coeficiente de resistência é obtido pelas aproximações de Squire & Young [2] e o
coeficiente de sustentação é determinado pela lei de Kutta-Joukowski:
cUcULCL
∞∞
Γ−=−=
2
21 2ρ
(4.2)
Consideraram-se valores de coeficiente de resistência, 20DC , apenas quando não
ocorre separação (representado pela sigla NO nas tabelas) ou, com alguma reserva, para
separações ocorridas em regiões superiores a 98% da corda. A sigla CNPP corresponde a
simulações em que o cálculo não pode prosseguir e deve-se ao facto de o método de camada
limite ter atingido o limite de validade, ou seja, nos casos em que não ocorre separação da
camada limite laminar antes de 90% da corda.
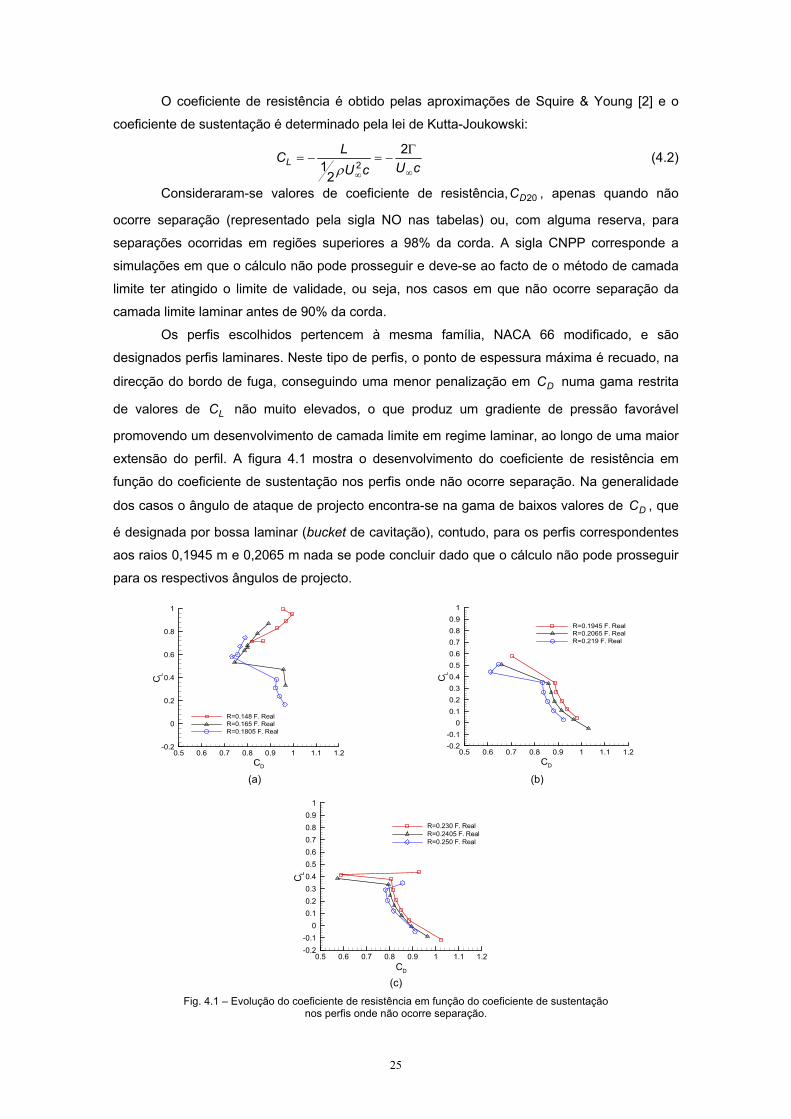
Os perfis escolhidos pertencem à mesma família, NACA 66 modificado, e são
designados perfis laminares. Neste tipo de perfis, o ponto de espessura máxima é recuado, na
direcção do bordo de fuga, conseguindo uma menor penalização em DC numa gama restrita
de valores de LC não muito elevados, o que produz um gradiente de pressão favorável
promovendo um desenvolvimento de camada limite em regime laminar, ao longo de uma maior
extensão do perfil. A figura 4.1 mostra o desenvolvimento do coeficiente de resistência em
função do coeficiente de sustentação nos perfis onde não ocorre separação. Na generalidade
dos casos o ângulo de ataque de projecto encontra-se na gama de baixos valores de DC , que
é designada por bossa laminar (bucket de cavitação), contudo, para os perfis correspondentes
aos raios 0,1945 m e 0,2065 m nada se pode concluir dado que o cálculo não pode prosseguir
para os respectivos ângulos de projecto.
CD
CL
0.5 0.6 0.7 0.8 0.9 1 1.1 1.2-0.2
0
0.2
0.4
0.6
0.8
1
R=0.148 F. RealR=0.165 F. RealR=0.1805 F. Real
CD
CL
0.5 0.6 0.7 0.8 0.9 1 1.1 1.2-0.2-0.1
00.10.20.30.40.50.60.70.80.9
1
R=0.1945 F. RealR=0.2065 F. RealR=0.219 F. Real
(a) (b)
CD
CL
0.5 0.6 0.7 0.8 0.9 1 1.1 1.2-0.2-0.1
00.10.20.30.40.50.60.70.80.9
1
R=0.230 F. RealR=0.2405 F. RealR=0.250 F. Real
(c)
Fig. 4.1 – Evolução do coeficiente de resistência em função do coeficiente de sustentação nos perfis onde não ocorre separação.
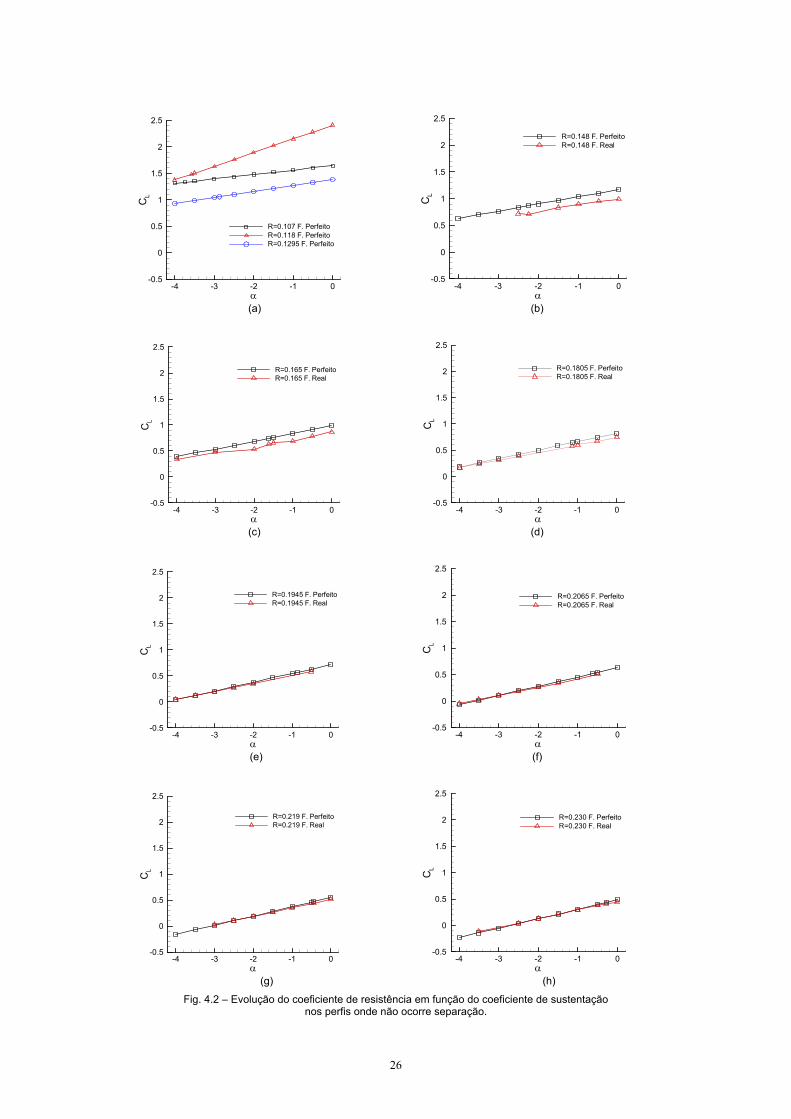
26
α
CL
-4 -3 -2 -1 0-0.5
0
0.5
1
1.5
2
2.5
R=0.107 F. PerfeitoR=0.118 F. PerfeitoR=0.1295 F. Perfeito
α
CL
-4 -3 -2 -1 0-0.5
0
0.5
1
1.5
2
2.5
R=0.148 F. PerfeitoR=0.148 F. Real
(a) (b)
α
CL
-4 -3 -2 -1 0-0.5
0
0.5
1
1.5
2
2.5
R=0.165 F. PerfeitoR=0.165 F. Real
α
CL
-4 -3 -2 -1 0-0.5
0
0.5
1
1.5
2
2.5
R=0.1805 F. PerfeitoR=0.1805 F. Real
(c) (d)
α
CL
-4 -3 -2 -1 0-0.5
0
0.5
1
1.5
2
2.5
R=0.1945 F. PerfeitoR=0.1945 F. Real
α
CL
-4 -3 -2 -1 0-0.5
0
0.5
1
1.5
2
2.5
R=0.2065 F. PerfeitoR=0.2065 F. Real
(e) (f)
α
CL
-4 -3 -2 -1 0-0.5
0
0.5
1
1.5
2
2.5
R=0.219 F. PerfeitoR=0.219 F. Real
α
CL
-4 -3 -2 -1 0-0.5
0
0.5
1
1.5
2
2.5
R=0.230 F. PerfeitoR=0.230 F. Real
(g) (h)
Fig. 4.2 – Evolução do coeficiente de resistência em função do coeficiente de sustentação nos perfis onde não ocorre separação.
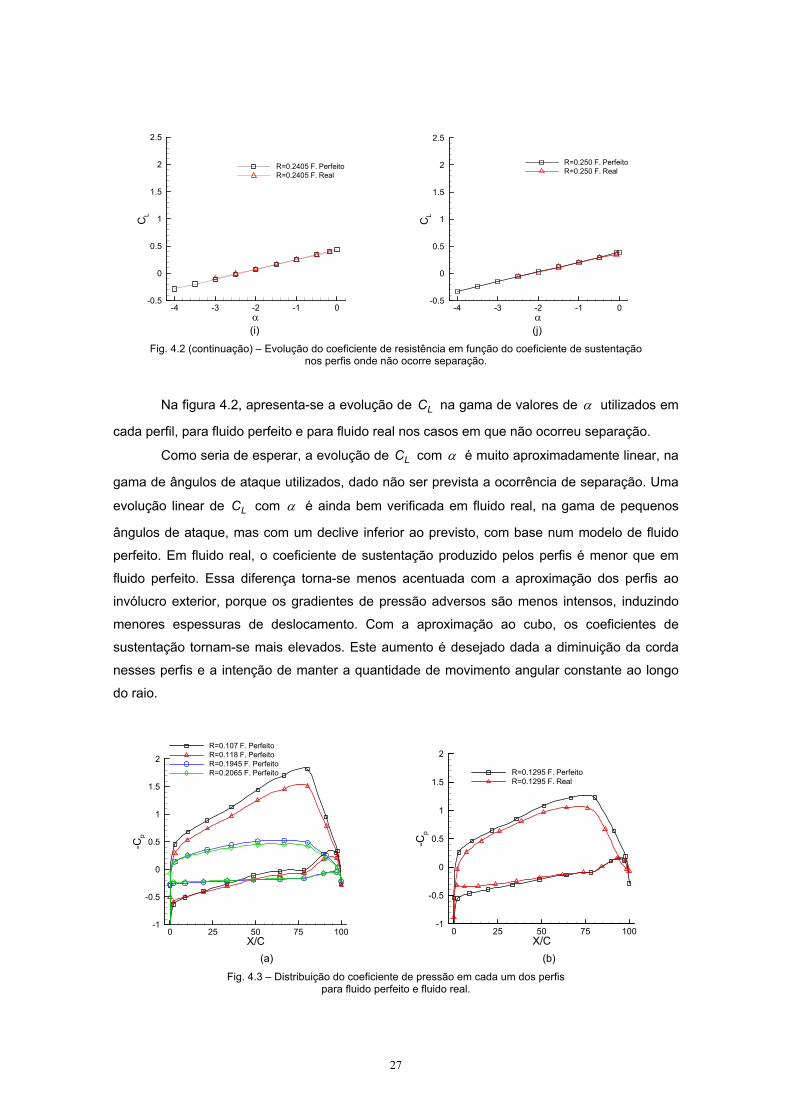
27
α
CL
-4 -3 -2 -1 0-0.5
0
0.5
1
1.5
2
2.5
R=0.2405 F. PerfeitoR=0.2405 F. Real
α
CL
-4 -3 -2 -1 0-0.5
0
0.5
1
1.5
2
2.5
R=0.250 F. PerfeitoR=0.250 F. Real
(i) (j)
Fig. 4.2 (continuação) – Evolução do coeficiente de resistência em função do coeficiente de sustentação nos perfis onde não ocorre separação.
Na figura 4.2, apresenta-se a evolução de LC na gama de valores de α utilizados em
cada perfil, para fluido perfeito e para fluido real nos casos em que não ocorreu separação.
Como seria de esperar, a evolução de LC com α é muito aproximadamente linear, na
gama de ângulos de ataque utilizados, dado não ser prevista a ocorrência de separação. Uma
evolução linear de LC com α é ainda bem verificada em fluido real, na gama de pequenos
ângulos de ataque, mas com um declive inferior ao previsto, com base num modelo de fluido
perfeito. Em fluido real, o coeficiente de sustentação produzido pelos perfis é menor que em
fluido perfeito. Essa diferença torna-se menos acentuada com a aproximação dos perfis ao
invólucro exterior, porque os gradientes de pressão adversos são menos intensos, induzindo
menores espessuras de deslocamento. Com a aproximação ao cubo, os coeficientes de
sustentação tornam-se mais elevados. Este aumento é desejado dada a diminuição da corda
nesses perfis e a intenção de manter a quantidade de movimento angular constante ao longo
do raio.
X/C
-Cp
0 25 50 75 100-1
-0.5
0
0.5
1
1.5
2R=0.107 F. PerfeitoR=0.118 F. PerfeitoR=0.1945 F. PerfeitoR=0.2065 F. Perfeito
X/C
-Cp
0 25 50 75 100-1
-0.5
0
0.5
1
1.5
2
R=0.1295 F. PerfeitoR=0.1295 F. Real
(a) (b)
Fig. 4.3 – Distribuição do coeficiente de pressão em cada um dos perfis para fluido perfeito e fluido real.
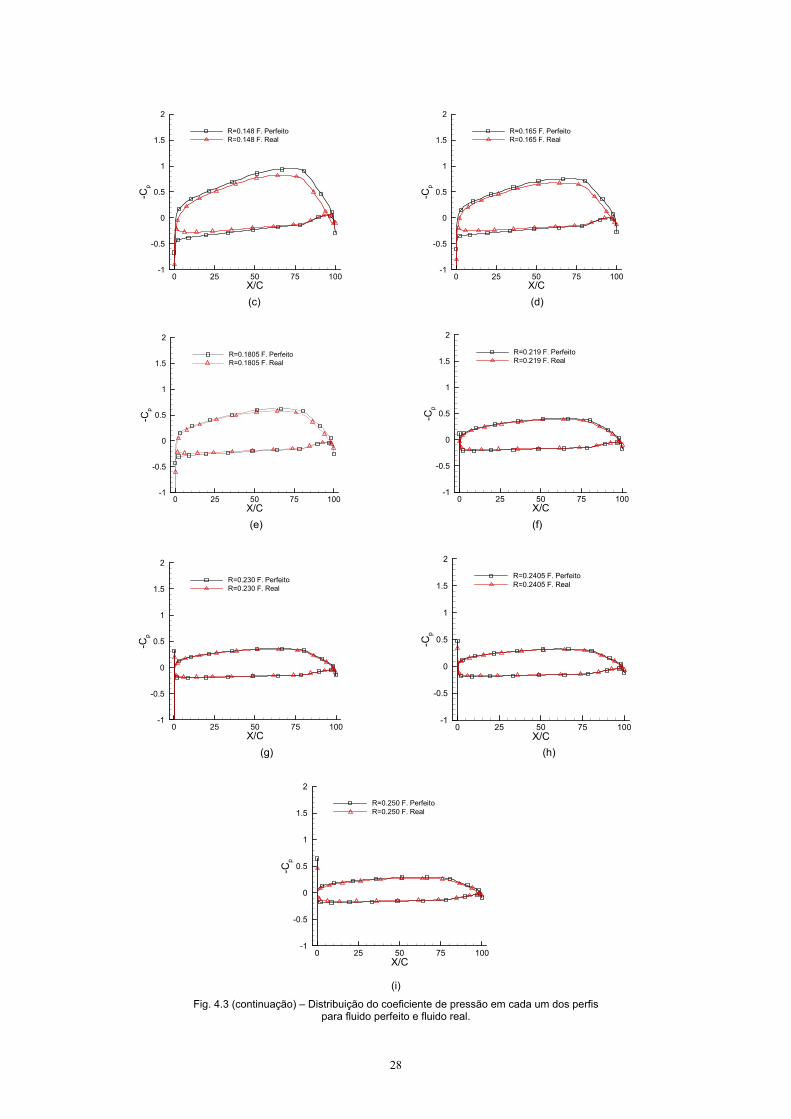
28
X/C
-Cp
0 25 50 75 100-1
-0.5
0
0.5
1
1.5
2
R=0.148 F. PerfeitoR=0.148 F. Real
X/C
-Cp
0 25 50 75 100-1
-0.5
0
0.5
1
1.5
2
R=0.165 F. PerfeitoR=0.165 F. Real
(c) (d)
X/C
-Cp
0 25 50 75 100-1
-0.5
0
0.5
1
1.5
2
R=0.1805 F. PerfeitoR=0.1805 F. Real
X/C
-Cp
0 25 50 75 100-1
-0.5
0
0.5
1
1.5
2
R=0.219 F. PerfeitoR=0.219 F. Real
(e) (f)
X/C
-Cp
0 25 50 75 100-1
-0.5
0
0.5
1
1.5
2
R=0.230 F. PerfeitoR=0.230 F. Real
X/C
-Cp
0 25 50 75 100-1
-0.5
0
0.5
1
1.5
2
R=0.2405 F. PerfeitoR=0.2405 F. Real
(g) (h)
X/C
-Cp
0 25 50 75 100-1
-0.5
0
0.5
1
1.5
2
R=0.250 F. PerfeitoR=0.250 F. Real
(i)
Fig. 4.3 (continuação) – Distribuição do coeficiente de pressão em cada um dos perfis para fluido perfeito e fluido real.
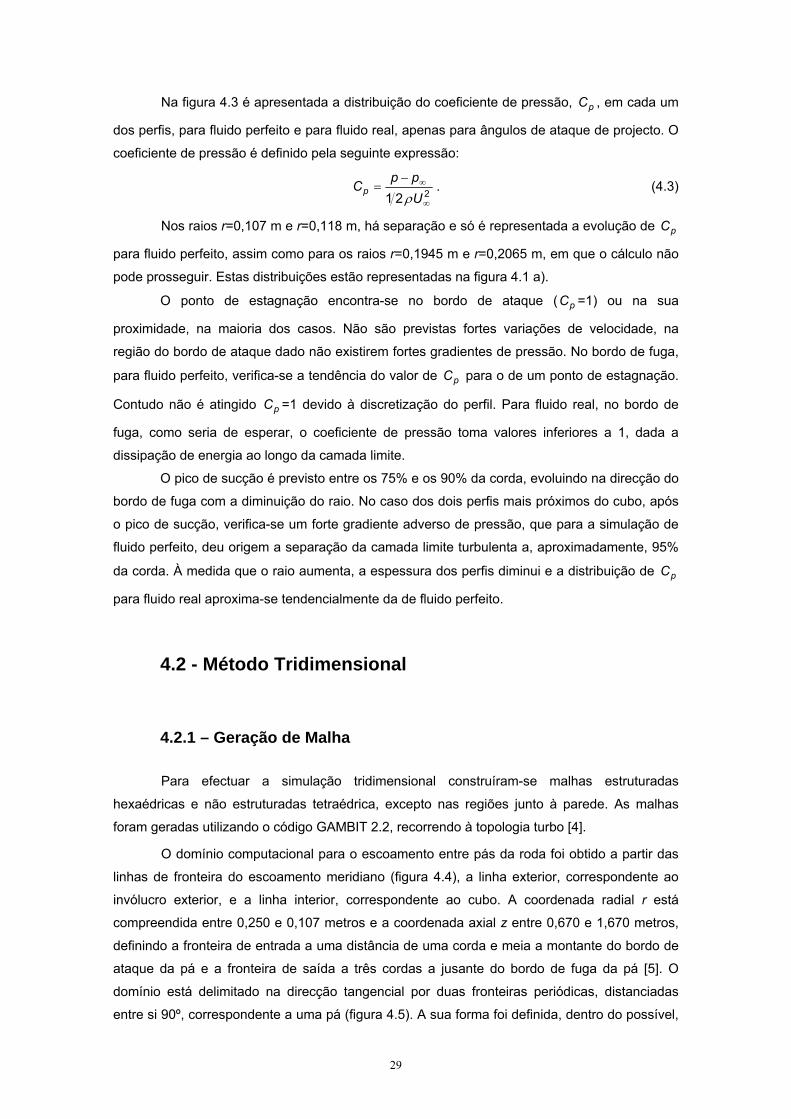
29
Na figura 4.3 é apresentada a distribuição do coeficiente de pressão, pC , em cada um
dos perfis, para fluido perfeito e para fluido real, apenas para ângulos de ataque de projecto. O
coeficiente de pressão é definido pela seguinte expressão:
221 ∞
∞−=
Upp
Cpρ
. (4.3)
Nos raios r=0,107 m e r=0,118 m, há separação e só é representada a evolução de pC
para fluido perfeito, assim como para os raios r=0,1945 m e r=0,2065 m, em que o cálculo não
pode prosseguir. Estas distribuições estão representadas na figura 4.1 a).
O ponto de estagnação encontra-se no bordo de ataque ( pC =1) ou na sua
proximidade, na maioria dos casos. Não são previstas fortes variações de velocidade, na
região do bordo de ataque dado não existirem fortes gradientes de pressão. No bordo de fuga,
para fluido perfeito, verifica-se a tendência do valor de pC para o de um ponto de estagnação.
Contudo não é atingido pC =1 devido à discretização do perfil. Para fluido real, no bordo de
fuga, como seria de esperar, o coeficiente de pressão toma valores inferiores a 1, dada a
dissipação de energia ao longo da camada limite.
O pico de sucção é previsto entre os 75% e os 90% da corda, evoluindo na direcção do
bordo de fuga com a diminuição do raio. No caso dos dois perfis mais próximos do cubo, após
o pico de sucção, verifica-se um forte gradiente adverso de pressão, que para a simulação de
fluido perfeito, deu origem a separação da camada limite turbulenta a, aproximadamente, 95%
da corda. À medida que o raio aumenta, a espessura dos perfis diminui e a distribuição de pC
para fluido real aproxima-se tendencialmente da de fluido perfeito.
4.2 - Método Tridimensional
4.2.1 – Geração de Malha
Para efectuar a simulação tridimensional construíram-se malhas estruturadas
hexaédricas e não estruturadas tetraédrica, excepto nas regiões junto à parede. As malhas
foram geradas utilizando o código GAMBIT 2.2, recorrendo à topologia turbo [4].
O domínio computacional para o escoamento entre pás da roda foi obtido a partir das
linhas de fronteira do escoamento meridiano (figura 4.4), a linha exterior, correspondente ao
invólucro exterior, e a linha interior, correspondente ao cubo. A coordenada radial r está
compreendida entre 0,250 e 0,107 metros e a coordenada axial z entre 0,670 e 1,670 metros,
definindo a fronteira de entrada a uma distância de uma corda e meia a montante do bordo de
ataque da pá e a fronteira de saída a três cordas a jusante do bordo de fuga da pá [5]. O
domínio está delimitado na direcção tangencial por duas fronteiras periódicas, distanciadas
entre si 90º, correspondente a uma pá (figura 4.5). A sua forma foi definida, dentro do possível,
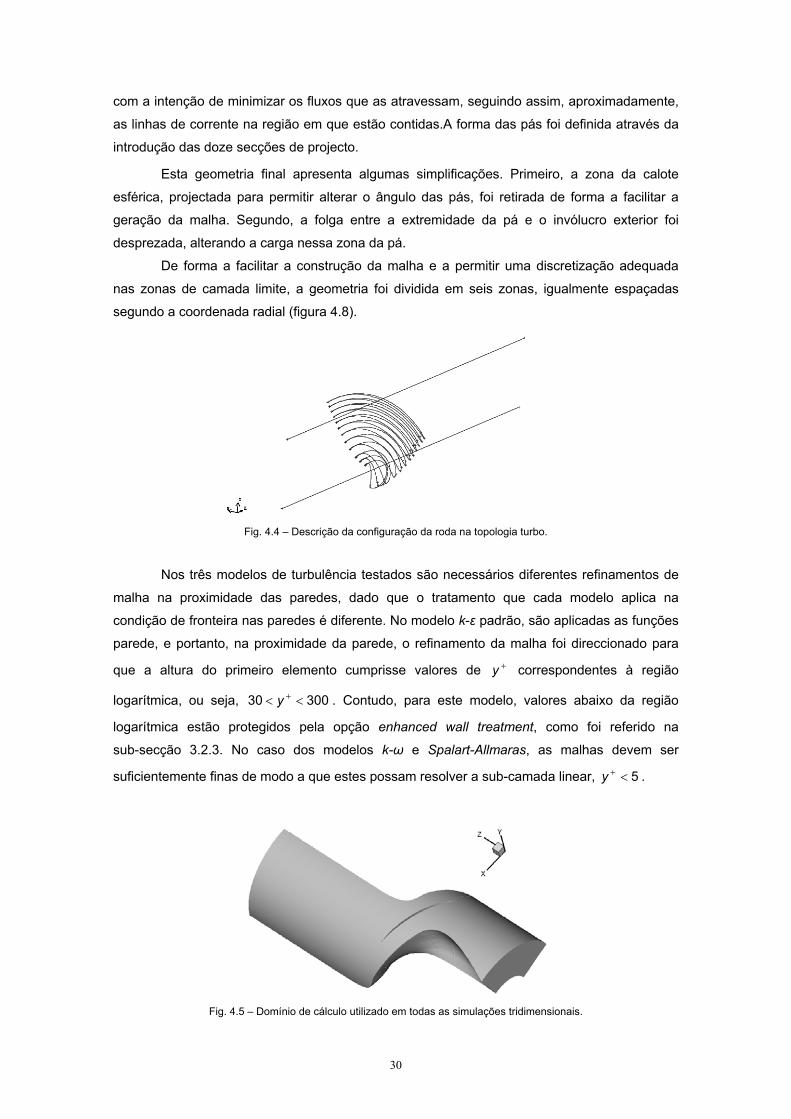
30
com a intenção de minimizar os fluxos que as atravessam, seguindo assim, aproximadamente,
as linhas de corrente na região em que estão contidas.A forma das pás foi definida através da
introdução das doze secções de projecto.
Esta geometria final apresenta algumas simplificações. Primeiro, a zona da calote
esférica, projectada para permitir alterar o ângulo das pás, foi retirada de forma a facilitar a
geração da malha. Segundo, a folga entre a extremidade da pá e o invólucro exterior foi
desprezada, alterando a carga nessa zona da pá.
De forma a facilitar a construção da malha e a permitir uma discretização adequada
nas zonas de camada limite, a geometria foi dividida em seis zonas, igualmente espaçadas
segundo a coordenada radial (figura 4.8).
Fig. 4.4 – Descrição da configuração da roda na topologia turbo.
Nos três modelos de turbulência testados são necessários diferentes refinamentos de
malha na proximidade das paredes, dado que o tratamento que cada modelo aplica na
condição de fronteira nas paredes é diferente. No modelo k-ε padrão, são aplicadas as funções
parede, e portanto, na proximidade da parede, o refinamento da malha foi direccionado para
que a altura do primeiro elemento cumprisse valores de +y correspondentes à região
logarítmica, ou seja, 30030 << +y . Contudo, para este modelo, valores abaixo da região
logarítmica estão protegidos pela opção enhanced wall treatment, como foi referido na
sub-secção 3.2.3. No caso dos modelos k-ω e Spalart-Allmaras, as malhas devem ser
suficientemente finas de modo a que estes possam resolver a sub-camada linear, 5<+y .
Fig. 4.5 – Domínio de cálculo utilizado em todas as simulações tridimensionais.
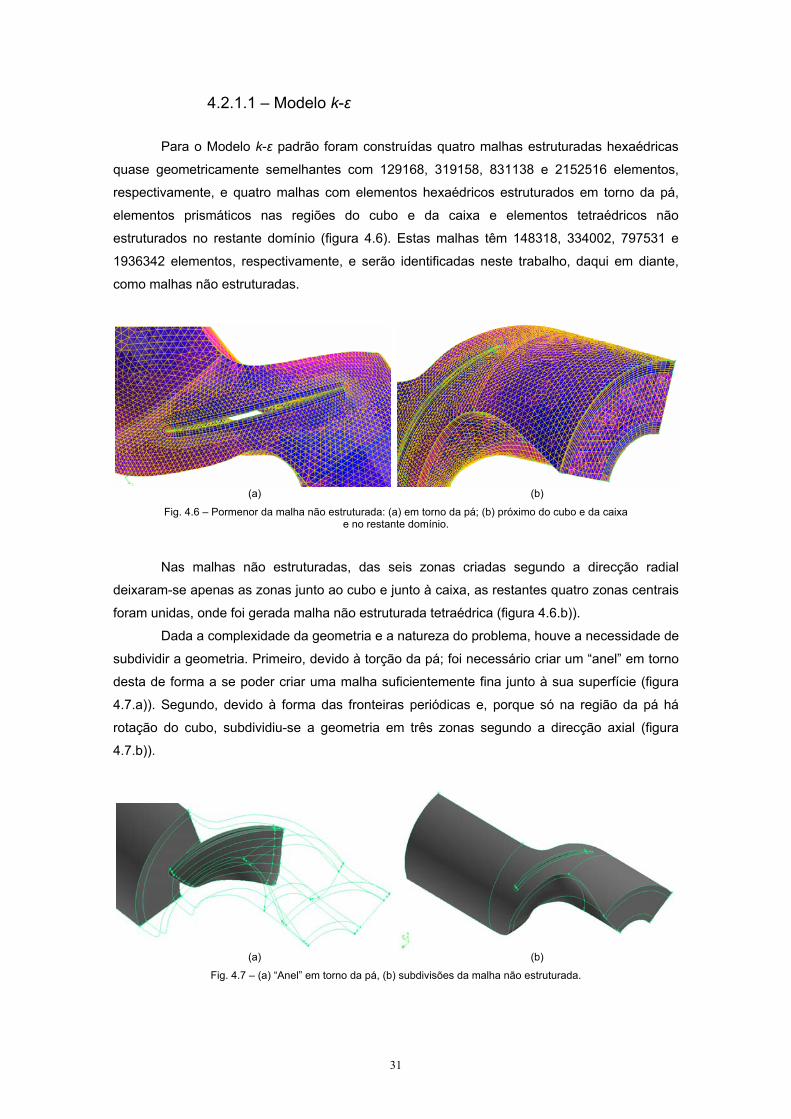
31
4.2.1.1 – Modelo k-ε
Para o Modelo k-ε padrão foram construídas quatro malhas estruturadas hexaédricas
quase geometricamente semelhantes com 129168, 319158, 831138 e 2152516 elementos,
respectivamente, e quatro malhas com elementos hexaédricos estruturados em torno da pá,
elementos prismáticos nas regiões do cubo e da caixa e elementos tetraédricos não
estruturados no restante domínio (figura 4.6). Estas malhas têm 148318, 334002, 797531 e
1936342 elementos, respectivamente, e serão identificadas neste trabalho, daqui em diante,
como malhas não estruturadas.
(a) (b)
Fig. 4.6 – Pormenor da malha não estruturada: (a) em torno da pá; (b) próximo do cubo e da caixa e no restante domínio.
Nas malhas não estruturadas, das seis zonas criadas segundo a direcção radial
deixaram-se apenas as zonas junto ao cubo e junto à caixa, as restantes quatro zonas centrais
foram unidas, onde foi gerada malha não estruturada tetraédrica (figura 4.6.b)).
Dada a complexidade da geometria e a natureza do problema, houve a necessidade de
subdividir a geometria. Primeiro, devido à torção da pá; foi necessário criar um “anel” em torno
desta de forma a se poder criar uma malha suficientemente fina junto à sua superfície (figura
4.7.a)). Segundo, devido à forma das fronteiras periódicas e, porque só na região da pá há
rotação do cubo, subdividiu-se a geometria em três zonas segundo a direcção axial (figura
4.7.b)).
(a) (b)
Fig. 4.7 – (a) “Anel” em torno da pá, (b) subdivisões da malha não estruturada.
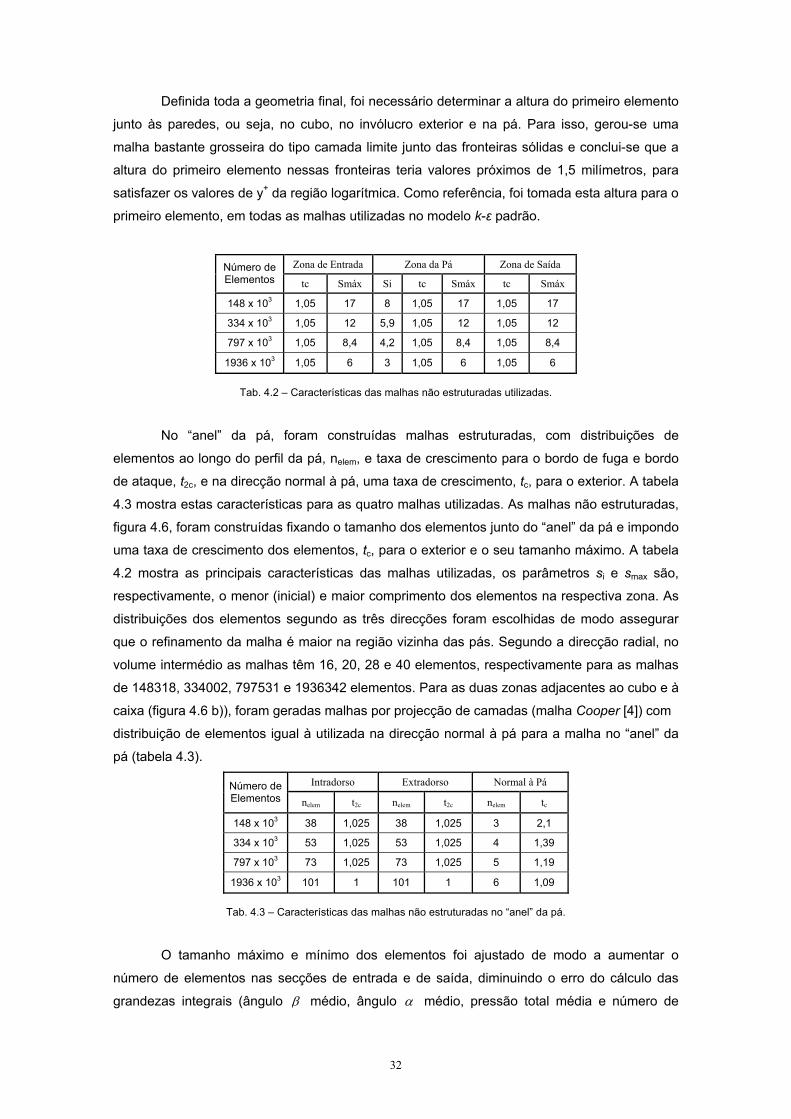
32
Definida toda a geometria final, foi necessário determinar a altura do primeiro elemento
junto às paredes, ou seja, no cubo, no invólucro exterior e na pá. Para isso, gerou-se uma
malha bastante grosseira do tipo camada limite junto das fronteiras sólidas e conclui-se que a
altura do primeiro elemento nessas fronteiras teria valores próximos de 1,5 milímetros, para
satisfazer os valores de y+ da região logarítmica. Como referência, foi tomada esta altura para o
primeiro elemento, em todas as malhas utilizadas no modelo k-ε padrão.
Zona de Entrada Zona da Pá Zona de Saída Número de Elementos tc Smáx Si tc Smáx tc Smáx
148 x 103 1,05 17 8 1,05 17 1,05 17
334 x 103 1,05 12 5,9 1,05 12 1,05 12
797 x 103 1,05 8,4 4,2 1,05 8,4 1,05 8,4
1936 x 103 1,05 6 3 1,05 6 1,05 6
Tab. 4.2 – Características das malhas não estruturadas utilizadas.
No “anel” da pá, foram construídas malhas estruturadas, com distribuições de
elementos ao longo do perfil da pá, nelem, e taxa de crescimento para o bordo de fuga e bordo
de ataque, t2c, e na direcção normal à pá, uma taxa de crescimento, tc, para o exterior. A tabela
4.3 mostra estas características para as quatro malhas utilizadas. As malhas não estruturadas,
figura 4.6, foram construídas fixando o tamanho dos elementos junto do “anel” da pá e impondo
uma taxa de crescimento dos elementos, tc, para o exterior e o seu tamanho máximo. A tabela
4.2 mostra as principais características das malhas utilizadas, os parâmetros si e smax são,
respectivamente, o menor (inicial) e maior comprimento dos elementos na respectiva zona. As
distribuições dos elementos segundo as três direcções foram escolhidas de modo assegurar
que o refinamento da malha é maior na região vizinha das pás. Segundo a direcção radial, no
volume intermédio as malhas têm 16, 20, 28 e 40 elementos, respectivamente para as malhas
de 148318, 334002, 797531 e 1936342 elementos. Para as duas zonas adjacentes ao cubo e à
caixa (figura 4.6 b)), foram geradas malhas por projecção de camadas (malha Cooper [4]) com
distribuição de elementos igual à utilizada na direcção normal à pá para a malha no “anel” da
pá (tabela 4.3).
Intradorso Extradorso Normal à Pá Número de Elementos nelem t2c nelem t2c nelem tc
148 x 103 38 1,025 38 1,025 3 2,1
334 x 103 53 1,025 53 1,025 4 1,39
797 x 103 73 1,025 73 1,025 5 1,19
1936 x 103 101 1 101 1 6 1,09
Tab. 4.3 – Características das malhas não estruturadas no “anel” da pá.
O tamanho máximo e mínimo dos elementos foi ajustado de modo a aumentar o
número de elementos nas secções de entrada e de saída, diminuindo o erro do cálculo das
grandezas integrais (ângulo β médio, ângulo α médio, pressão total média e número de
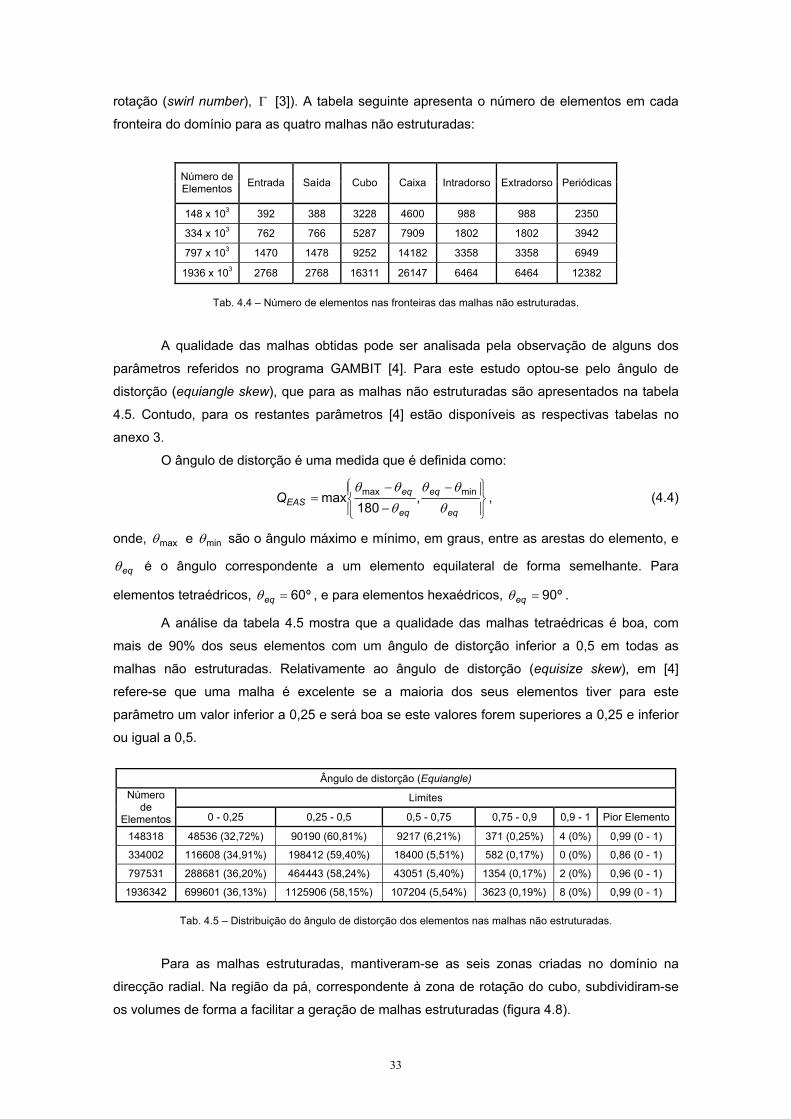
33
rotação (swirl number), Γ [3]). A tabela seguinte apresenta o número de elementos em cada
fronteira do domínio para as quatro malhas não estruturadas:
Número de Elementos Entrada Saída Cubo Caixa Intradorso Extradorso Periódicas
148 x 103 392 388 3228 4600 988 988 2350
334 x 103 762 766 5287 7909 1802 1802 3942
797 x 103 1470 1478 9252 14182 3358 3358 6949
1936 x 103 2768 2768 16311 26147 6464 6464 12382
Tab. 4.4 – Número de elementos nas fronteiras das malhas não estruturadas.
A qualidade das malhas obtidas pode ser analisada pela observação de alguns dos
parâmetros referidos no programa GAMBIT [4]. Para este estudo optou-se pelo ângulo de
distorção (equiangle skew), que para as malhas não estruturadas são apresentados na tabela
4.5. Contudo, para os restantes parâmetros [4] estão disponíveis as respectivas tabelas no
anexo 3.
O ângulo de distorção é uma medida que é definida como:
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧ −
−
−=
eq
eq
eq
eqEASQ
θθθ
θθθ minmax ,
180max , (4.4)
onde, maxθ e minθ são o ângulo máximo e mínimo, em graus, entre as arestas do elemento, e
eqθ é o ângulo correspondente a um elemento equilateral de forma semelhante. Para
elementos tetraédricos, º60=eqθ , e para elementos hexaédricos, º90=eqθ .
A análise da tabela 4.5 mostra que a qualidade das malhas tetraédricas é boa, com
mais de 90% dos seus elementos com um ângulo de distorção inferior a 0,5 em todas as
malhas não estruturadas. Relativamente ao ângulo de distorção (equisize skew), em [4]
refere-se que uma malha é excelente se a maioria dos seus elementos tiver para este
parâmetro um valor inferior a 0,25 e será boa se este valores forem superiores a 0,25 e inferior
ou igual a 0,5.
Ângulo de distorção (Equiangle)
Limites Número de
Elementos 0 - 0,25 0,25 - 0,5 0,5 - 0,75 0,75 - 0,9 0,9 - 1 Pior Elemento
148318 48536 (32,72%) 90190 (60,81%) 9217 (6,21%) 371 (0,25%) 4 (0%) 0,99 (0 - 1)
334002 116608 (34,91%) 198412 (59,40%) 18400 (5,51%) 582 (0,17%) 0 (0%) 0,86 (0 - 1)
797531 288681 (36,20%) 464443 (58,24%) 43051 (5,40%) 1354 (0,17%) 2 (0%) 0,96 (0 - 1)
1936342 699601 (36,13%) 1125906 (58,15%) 107204 (5,54%) 3623 (0,19%) 8 (0%) 0,99 (0 - 1)
Tab. 4.5 – Distribuição do ângulo de distorção dos elementos nas malhas não estruturadas.
Para as malhas estruturadas, mantiveram-se as seis zonas criadas no domínio na
direcção radial. Na região da pá, correspondente à zona de rotação do cubo, subdividiram-se
os volumes de forma a facilitar a geração de malhas estruturadas (figura 4.8).
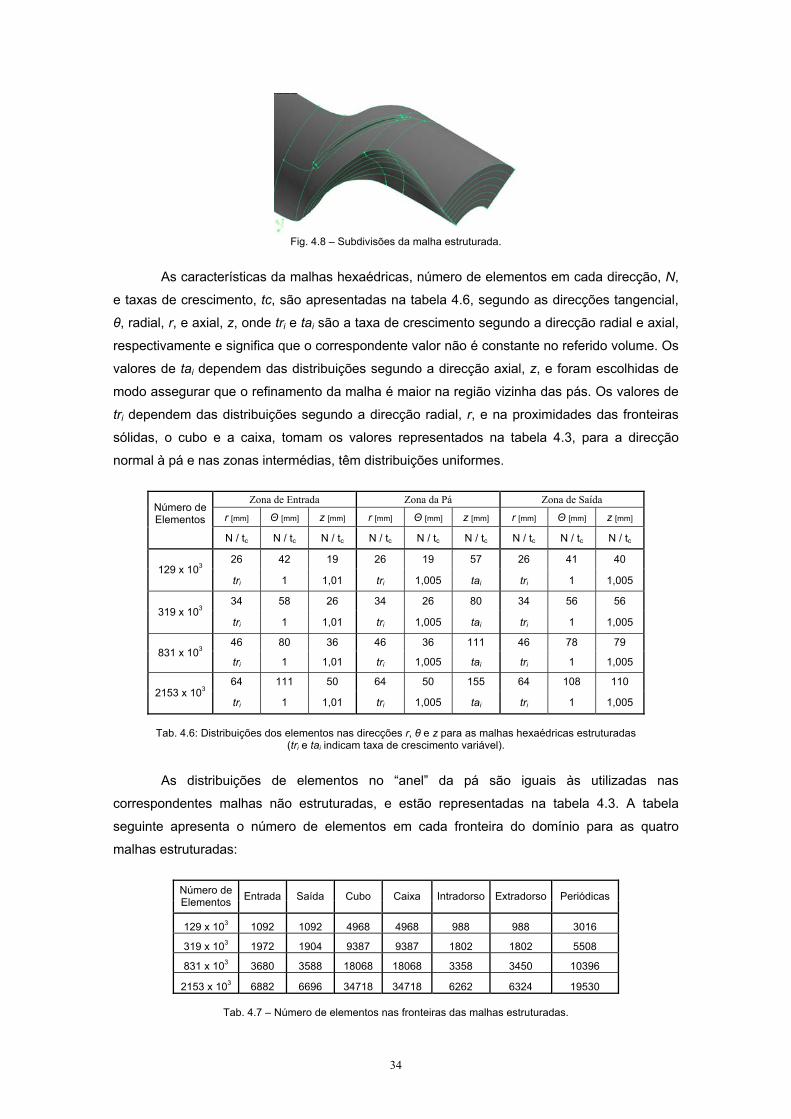
34
Fig. 4.8 – Subdivisões da malha estruturada.
As características da malhas hexaédricas, número de elementos em cada direcção, N,
e taxas de crescimento, tc, são apresentadas na tabela 4.6, segundo as direcções tangencial,
θ, radial, r, e axial, z, onde tri e tai são a taxa de crescimento segundo a direcção radial e axial,
respectivamente e significa que o correspondente valor não é constante no referido volume. Os
valores de tai dependem das distribuições segundo a direcção axial, z, e foram escolhidas de
modo assegurar que o refinamento da malha é maior na região vizinha das pás. Os valores de
tri dependem das distribuições segundo a direcção radial, r, e na proximidades das fronteiras
sólidas, o cubo e a caixa, tomam os valores representados na tabela 4.3, para a direcção
normal à pá e nas zonas intermédias, têm distribuições uniformes.
Zona de Entrada Zona da Pá Zona de Saída
r [mm] Θ [mm] z [mm] r [mm] Θ [mm] z [mm] r [mm] Θ [mm] z [mm] Número de Elementos
N / tc N / tc N / tc N / tc N / tc N / tc N / tc N / tc N / tc
26 42 19 26 19 57 26 41 40 129 x 103
tri 1 1,01 tri 1,005 tai tri 1 1,005
34 58 26 34 26 80 34 56 56 319 x 103
tri 1 1,01 tri 1,005 tai tri 1 1,005
46 80 36 46 36 111 46 78 79 831 x 103
tri 1 1,01 tri 1,005 tai tri 1 1,005
64 111 50 64 50 155 64 108 110 2153 x 103
tri 1 1,01 tri 1,005 tai tri 1 1,005
Tab. 4.6: Distribuições dos elementos nas direcções r, θ e z para as malhas hexaédricas estruturadas
(tri e tai indicam taxa de crescimento variável).
As distribuições de elementos no “anel” da pá são iguais às utilizadas nas
correspondentes malhas não estruturadas, e estão representadas na tabela 4.3. A tabela
seguinte apresenta o número de elementos em cada fronteira do domínio para as quatro
malhas estruturadas:
Número de Elementos Entrada Saída Cubo Caixa Intradorso Extradorso Periódicas
129 x 103 1092 1092 4968 4968 988 988 3016
319 x 103 1972 1904 9387 9387 1802 1802 5508
831 x 103 3680 3588 18068 18068 3358 3450 10396
2153 x 103 6882 6696 34718 34718 6262 6324 19530
Tab. 4.7 – Número de elementos nas fronteiras das malhas estruturadas.
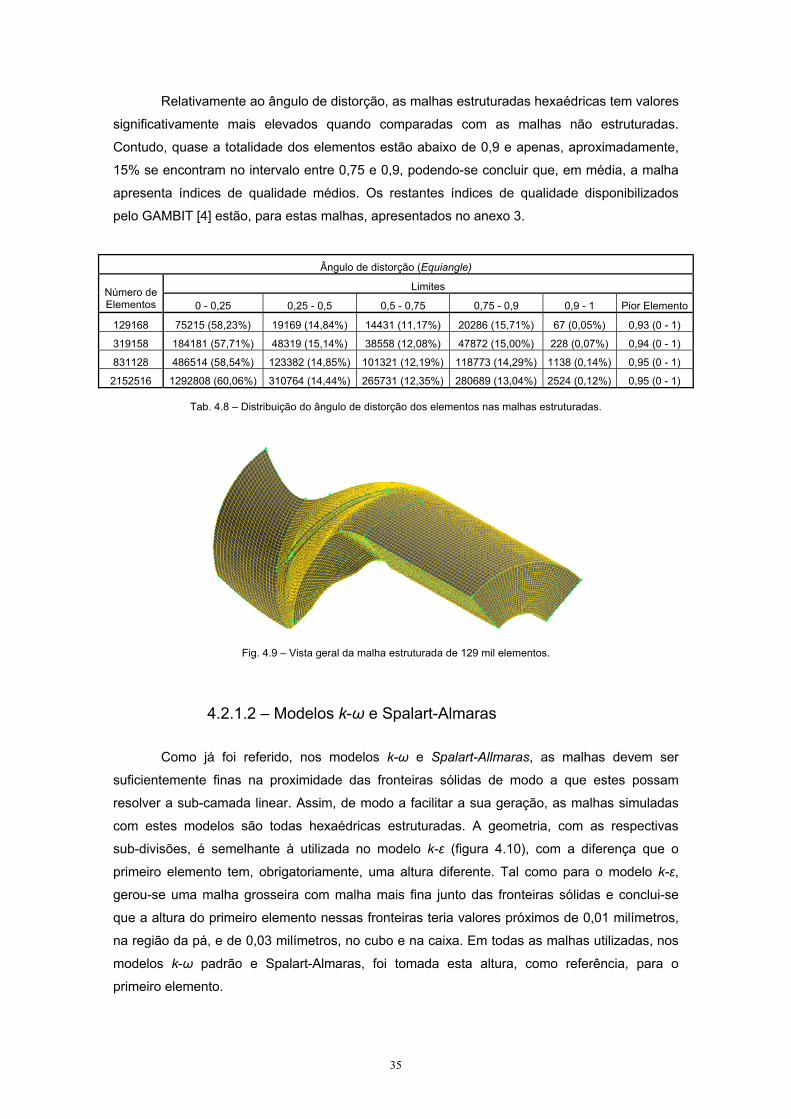
35
Relativamente ao ângulo de distorção, as malhas estruturadas hexaédricas tem valores
significativamente mais elevados quando comparadas com as malhas não estruturadas.
Contudo, quase a totalidade dos elementos estão abaixo de 0,9 e apenas, aproximadamente,
15% se encontram no intervalo entre 0,75 e 0,9, podendo-se concluir que, em média, a malha
apresenta índices de qualidade médios. Os restantes índices de qualidade disponibilizados
pelo GAMBIT [4] estão, para estas malhas, apresentados no anexo 3.
Ângulo de distorção (Equiangle)
Limites Número de Elementos 0 - 0,25 0,25 - 0,5 0,5 - 0,75 0,75 - 0,9 0,9 - 1 Pior Elemento
129168 75215 (58,23%) 19169 (14,84%) 14431 (11,17%) 20286 (15,71%) 67 (0,05%) 0,93 (0 - 1)
319158 184181 (57,71%) 48319 (15,14%) 38558 (12,08%) 47872 (15,00%) 228 (0,07%) 0,94 (0 - 1)
831128 486514 (58,54%) 123382 (14,85%) 101321 (12,19%) 118773 (14,29%) 1138 (0,14%) 0,95 (0 - 1)
2152516 1292808 (60,06%) 310764 (14,44%) 265731 (12,35%) 280689 (13,04%) 2524 (0,12%) 0,95 (0 - 1)
Tab. 4.8 – Distribuição do ângulo de distorção dos elementos nas malhas estruturadas.
Fig. 4.9 – Vista geral da malha estruturada de 129 mil elementos.
4.2.1.2 – Modelos k-ω e Spalart-Almaras
Como já foi referido, nos modelos k-ω e Spalart-Allmaras, as malhas devem ser
suficientemente finas na proximidade das fronteiras sólidas de modo a que estes possam
resolver a sub-camada linear. Assim, de modo a facilitar a sua geração, as malhas simuladas
com estes modelos são todas hexaédricas estruturadas. A geometria, com as respectivas
sub-divisões, é semelhante à utilizada no modelo k-ε (figura 4.10), com a diferença que o
primeiro elemento tem, obrigatoriamente, uma altura diferente. Tal como para o modelo k-ε,
gerou-se uma malha grosseira com malha mais fina junto das fronteiras sólidas e conclui-se
que a altura do primeiro elemento nessas fronteiras teria valores próximos de 0,01 milímetros,
na região da pá, e de 0,03 milímetros, no cubo e na caixa. Em todas as malhas utilizadas, nos
modelos k-ω padrão e Spalart-Almaras, foi tomada esta altura, como referência, para o
primeiro elemento.
36
Fig. 4.10 – Perspectiva geral da geometria utilizada no modelo k-ω padrão e Spalart-Almaras.
As características da malhas hexaédricas utilizadas nestes dois modelos (figura 4.11),
número de elementos em cada direcção, N, e taxas de crescimento, tc, são apresentadas na
tabela 4.9, segundo as direcções tangencial, θ, radial, r, e axial, z, onde tri e tai são a taxa de
crescimento segundo a direcção radial e axial, respectivamente e significa que o
correspondente valor não é constante no referido volume. Os valores de tai dependem das
distribuições segundo a direcção axial, z, e foram, também para estes modelos, escolhidas de
modo assegurar que o refinamento da malha é maior na região vizinha das pás. Os valores de
tri dependem das distribuições segundo a direcção radial, r, e na proximidades das fronteiras
sólidas, o cubo e a caixa, tomam os valores representados na tabela 4.10 para a direcção
normal à pá e nas zonas intermédias, têm distribuições uniformes.
Zona de Entrada Zona da Pá Zona de Saída r [mm] Θ [mm] z [mm] r [mm] Θ [mm] z [mm] r [mm] Θ [mm] z [mm] Número de
Elementos
N / tc N / tc N / tc N / tc N / tc N / tc N / tc N / tc N / tc
36 30 17 36 13 56 36 29 29 127 x 103
tri 1 1,025 tri 1,005 tai tri 1 1,01
46 42 22 46 18 77 46 40 39 300 x 103
tri 1 1,025 tri 1,005 tai tri 1 1,01 62 58 30 62 25 107 62 56 54
766 x 103 tri 1 1,025 tri 1,005 tai tri 1 1,01 86 81 40 86 35 147 86 78 75
2033 x 103 tri 1 1,025 tri 1,005 tai tri 1 1,01
Tab. 4.9: Distribuições dos elementos nas direcções r, θ e z para as malhas hexaédricas estruturadas.
Intradorso Extradorso Normal Pá Número de Elementos
nelem t2c nelem t2c nelem tc
127 x 103 38 1,025 38 1,025 3 2,1
300 x 103 53 1,025 53 1,025 4 1,39
766 x 103 73 1,025 73 1,025 5 1,19
2033 x 103 101 1 101 1 6 1,09
Tab. 4.10 – Características das malhas não estruturadas no “anel” da pá.
37
No “anel” da pá, tal como nas malhas anteriores, foram construídas malhas
estruturadas, com distribuições de elementos ao longo do perfil da pá, nelem, e taxa de
crescimento para o bordo de fuga e bordo de ataque, t2c e na direcção normal à pá, uma taxa
de crescimento, tc, para o exterior (tabela 4.10). A tabela seguinte apresenta o número de
elementos em cada fronteira do domínio para as quatro malhas estruturadas:
Número de Elementos Entrada Saída Cubo Caixa Intradorso Extradorso Periódicas
127 x 103 1080 1044 3533 3533 1440 1440 3672
300 x 103 4033 1840 6517 6517 2530 2530 6348
766 x 103 3596 3472 12352 12352 4650 4650 11842
2033 x 103 6966 6708 23640 23640 8858 8858 22532
Tab. 4.11 – Número de elementos nas fronteiras das malhas estruturadas.
Relativamente ao ângulo de distorção, as malhas estruturadas hexaédricas tem valores
significativamente mais elevados quando comparadas com as malhas não estruturadas.
Contudo, tal como nas malhas estruturadas hexaédricas para o modelo k-ε, quase a totalidade
dos elementos estão abaixo de 0,9 e apenas, aproximadamente, 15% se encontram no
intervalo entre 0,75 e 0,9, podendo-se concluir que, em média, a malha apresenta índices de
qualidade médios, e são apresentados na tabela seguinte.
Ângulo de distorção (Equiangle)
Limites Número de Elementos
0 - 0,25 0,25 - 0,5 0,5 - 0,75 0,75 - 0,9 0,9 - 1 Pior
Elemento
127188 65304 (51.34%) 26259 (20.65%) 16534 (13.00%) 18938 (14.89%) 153 (0.12%) 0.97 (0 - 1)
299782 152321 (50.81%) 59940 (19.99%) 42399 (14.14%) 44783 (14.92%) 339 (0.11%) 0.95 (0 - 1)
765824 393519 (51.39%) 148929 (19.45%) 110228 (14.39%) 111825 (14.60%) 1323 (0.17%) 0.97 (0 - 1)
2033040 1062960 (52.28%) 371481 (18.27%) 314977 (15.49%) 278118 (13.68%) 5504 (0.27%) 0.97 (0 - 1)
Tab. 4.12 – Distribuição do ângulo de distorção dos elementos nas malhas estruturadas.
Os restantes índices de qualidade disponibilizados pelo GAMBIT [4] estão, para estas
malhas, apresentados no anexo 3.
Fig. 4.11 – Vista geral da malha estruturada de 300 mil elementos com camada limite fina.
38
4.2.2 – Descrição das Simulações
O FLUENT permite escolher duas técnicas de solução para resolver as equações que
regem o escoamento (continuidade e transporte). Um método utiliza um algoritmo de cálculo
que resolve o sistema de equações de uma forma acoplada (coupled solver [3]); o outro
método utiliza um algoritmo que resolve o sistema de equações de forma segregada
(segregated solver [3]). O método utilizado foi o segregado, dado que exige menores recursos
computacionais e também é apropriado para a utilização de um sistema de coordenadas em
rotação, como sugerido em [3].
Para o método segregado estão disponíveis alguns algoritmos para resolver o
acoplamento entre a velocidade e a pressão: de entre estes seleccionou-se o SIMPLEC [24],
dado ser mais consistente que o algoritmo SIMPLE [3].
O código FLUENT resolve a forma linearizada do sistema das equações de transporte
discretizadas, utilizando um algoritmo de resolução do tipo Gauss-Siedel ponto-a-ponto, em
conjunto com um método algébrico de malha múltipla. Os termos difusivos das equações são
discretizados pelo esquema de diferenças centrais de segunda ordem [3]. As derivadas da
pressão são aproximadas por esquemas de segunda ordem. Os termos convectivos nas faces
dos volumes de controlo são interpolados pelo esquema QUICK [25] de terceira ordem. De
entre os diferentes esquemas para obter a pressão nas faces dos volumes de controlo, optou-
se por escolher o esquema de interpolação de segunda ordem [3]. Nas simulações efectuadas
foram sempre utilizadas variáveis com precisão simples.
Os cálculos foram efectuados considerando pressões relativas, de forma a minimizar o
efeito do arredondamento. Nas simulações efectuadas, a pressão de referência é definida na
secção de entrada, tem valor igual à pressão atmosférica padrão, 101325 Pa. O fluido é ar,
com massa volúmica e viscosidade constantes: ρ = 1,225 kg/m3 e μ = 1,789 x 10-5 Pa.s.
4.2.3 – Condições de Fronteira
As condições de fronteira especificam o valor das variáveis nas fronteiras do domínio
físico em estudo. No âmbito das simulações efectuadas existem cinco tipos de condições de
fronteira: entrada, saída, superfícies sólidas e superfícies periódicas.
Dos diferentes tipos disponíveis no código FLUENT, na fronteira de entrada optou-se
por atribuir o valor das componentes da velocidade para o referêncial absoluto. Esta condição
de fronteira é identificada no código como Velocity Inlet. Utilizou-se o sistema de coordenadas
cilindrico local com origem no eixo axial z da turbina. As componentes da velocidade de
entrada de projecto para este sistema de coordenadas são dadas por:
0=rV (4.5)
smr
V /491,2=θ (4.6)
39
smAQVa /96,20== (4.7)
onde, r é o raio, Q o caudal e A a área da secção de entrada de projecto. As componentes
tangencial e axial de velocidade são obtidas, respectivamente, dos valores de quantidade de
movimento angular e do caudal.
A turbulência na secção de entrada foi modelada a partir da intensidade de turbulência,
I , e do diâmetro hidráulico, HD . Para a intensidade de turbulência utilizou-se um valor de 4%,
como sugerido em [3]. O diâmetro hidráulico foi obtido pela seguinte expressão:
mDDPAD inH 286,0=−== (4.8)
Na fronteira de saída do domínio utilizou-se a condição de saída livre, designada no
código por Outflow, que corresponde a efectuar uma extrapolação do valor das variáveis de
grau zero, a partir do interior do domínio, sem ser necessário impor qualquer valor a qualquer
variável.
Dada a rotação do cubo, é necessário definir o sistema de coordenadas em rotação.
Para isso, nas condições de fronteira, em fluido, é dada a velocidade de rotação desejada de
2500 r.p.m. Na formulação da velocidade deve-se ter em conta a rotação do fluido, ou seja, se
maioritariamente a velocidade tem componente rotacional em todo o domínio ou não. No caso
em estudo, é de se esperar, a jusante da pá, fraca ou nula, preferencialmente, rotação do
fluido. Se se observar a forma das fronteiras periódica (por exemplo, na figura 4.5) desde a
secção de entrada até à de saída, o domínio foi gerado de forma a acompanhar,
aproximadamente, as linhas de corrente. Assim, de forma a diminuir os fluxos nas fronteiras
periódicas optou-se pela formulação absoluta para a velocidade.
Nas superfícies do domínio que correspondem a superfícies sólidas é imposta a
condição de impermeabilidade para todas as simulações efectuadas, como definido no tópico
3.2.3.4. Contudo, dada a rotação do domínio, foi necessário definir a rotação das fronteiras
sólidas. No invólucro exterior, na região do cubo de entrada e na de saída foi definida
velocidade de rotação nula. Na região central do cubo e as faces de pressão e sucção da pá foi
definida uma velocidade de rotação de 2500 r.p.m.. Na figura 4.12 é facilmente identificável as
três regiões referidas do cubo.
Nas superfícies periódicas foi definida periodicidade rotacional.
Fig. 4.12 – Vista geral das três regiões cubo da roda com a pá.
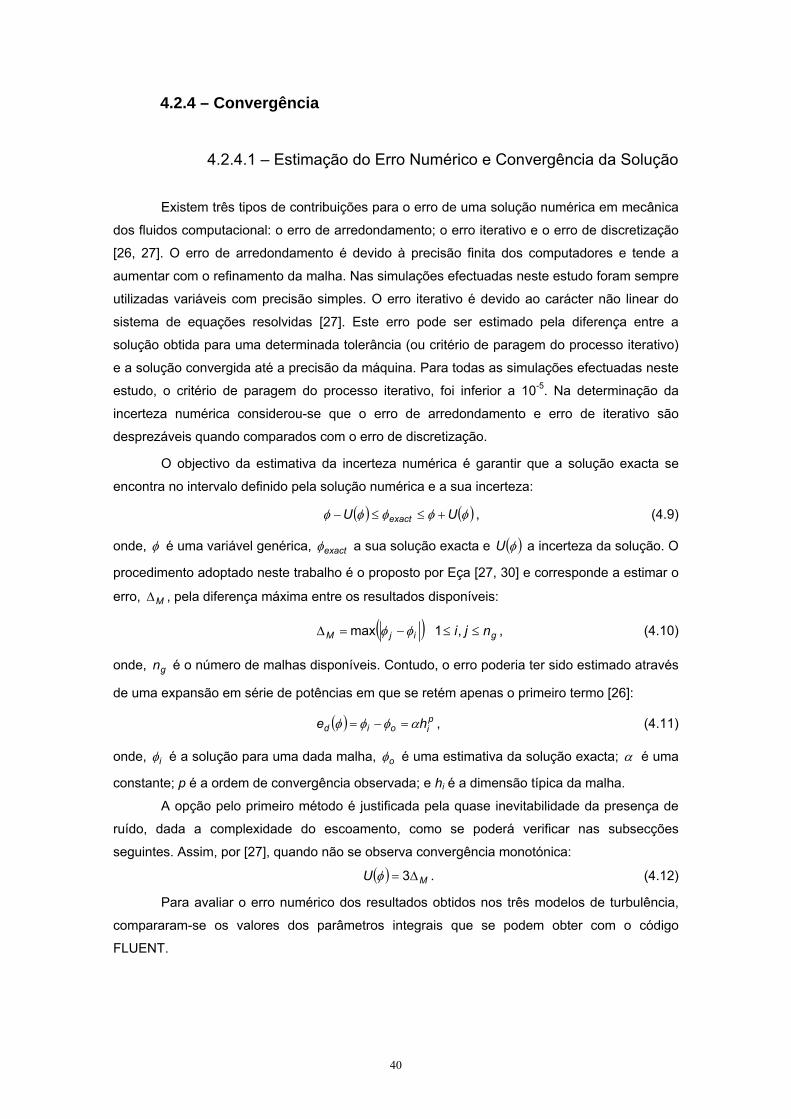
40
4.2.4 – Convergência
4.2.4.1 – Estimação do Erro Numérico e Convergência da Solução
Existem três tipos de contribuições para o erro de uma solução numérica em mecânica
dos fluidos computacional: o erro de arredondamento; o erro iterativo e o erro de discretização
[26, 27]. O erro de arredondamento é devido à precisão finita dos computadores e tende a
aumentar com o refinamento da malha. Nas simulações efectuadas neste estudo foram sempre
utilizadas variáveis com precisão simples. O erro iterativo é devido ao carácter não linear do
sistema de equações resolvidas [27]. Este erro pode ser estimado pela diferença entre a
solução obtida para uma determinada tolerância (ou critério de paragem do processo iterativo)
e a solução convergida até a precisão da máquina. Para todas as simulações efectuadas neste
estudo, o critério de paragem do processo iterativo, foi inferior a 10-5. Na determinação da
incerteza numérica considerou-se que o erro de arredondamento e erro de iterativo são
desprezáveis quando comparados com o erro de discretização.
O objectivo da estimativa da incerteza numérica é garantir que a solução exacta se
encontra no intervalo definido pela solução numérica e a sua incerteza:
( ) ( )φφφφφ UU exact +≤≤− , (4.9)
onde, φ é uma variável genérica, exactφ a sua solução exacta e ( )φU a incerteza da solução. O
procedimento adoptado neste trabalho é o proposto por Eça [27, 30] e corresponde a estimar o
erro, MΔ , pela diferença máxima entre os resultados disponíveis:
( ) gijM nji ≤≤−=Δ ,1max φφ , (4.10)
onde, gn é o número de malhas disponíveis. Contudo, o erro poderia ter sido estimado através
de uma expansão em série de potências em que se retém apenas o primeiro termo [26]:
( ) pioid he αφφφ =−= , (4.11)
onde, iφ é a solução para uma dada malha, oφ é uma estimativa da solução exacta; α é uma
constante; p é a ordem de convergência observada; e hi é a dimensão típica da malha.
A opção pelo primeiro método é justificada pela quase inevitabilidade da presença de
ruído, dada a complexidade do escoamento, como se poderá verificar nas subsecções
seguintes. Assim, por [27], quando não se observa convergência monotónica:
( ) MU Δ= 3φ . (4.12)
Para avaliar o erro numérico dos resultados obtidos nos três modelos de turbulência,
compararam-se os valores dos parâmetros integrais que se podem obter com o código
FLUENT.

41
As variáveis consideradas foram o números de rotação, Γ , e os valores médios do
ângulo da componente radial, β , à entrada e à saída, a rendimento, η , e o coeficiente de
perda, aζ . O números de rotação, Γ , é definido da seguinte forma:
( )( )∫ ⋅
∫ ⋅=Γ
S z
S
dSnvvrdSnvrv
ˆˆ
r
rθ , (4.13)
onde, r é a coordenada radial, θv é a velocidade tangencial, zv é a velocidade axial, vr
é o
vector velocidade, n̂ é o vector unitário normal à superfície, S representa a secção de entrada
ou de saída , e
∫= S rdSS
r 1 . (4.14)
Os valores médios do ângulo da componente radial, β , são definidos como:
⎟⎟⎠
⎞⎜⎜⎝
⎛
∫∫= −
A z
A
dAvdAvθβ 1tan , (4.15)
onde, A é a área da secção de entrada ou saída. A rendimento, η , é calculada pelo código
através da seguinte expressão:
( )ω
ηΤ−
= 0102 PPQ, (4.16)
onde, Q é o caudal volúmico, 02P e 01P são a pressão total nas secções de entrada e de
saída, respectivamente, Τ é o binário aplicado sobre a roda e ω é a velocidade de rotação.
O coeficiente de perda, aζ , é definido por:
( )220102
RPP
aρω
ξ−
= , (4.17)
onde, R é o raio da roda.
Os valores dos parâmetros integrais são apresentados em função de h/h1, onde
3 / elemNVolh = é uma medida representativa da dimensão da malha, h1 é o h da malha mais
fina, Vol o volume do domínio e Nelem o número total de volumes de controlo.
4.2.4.1.1 – Modelo k-ε
Como já foi referido na subsecção 4.2.1, para o modelo k-ε foram geradas quatro
malhas estruturadas hexaédricas e quatro malhas não estruturadas tetraédricas. As variações
dos parâmetros integrais com o refinamento da malha para este modelo são apresentadas na
figura 4.13, juntamente com os valores de projecto. Como se pode observar, na maioria das
distribuições das variáveis há presença de ruído, não sendo possível obter uma convergência
monotónica. Contudo, é possível concluir-se que, como seria de esperar, o ruído das variáveis
diminui com o refinamento da malha.
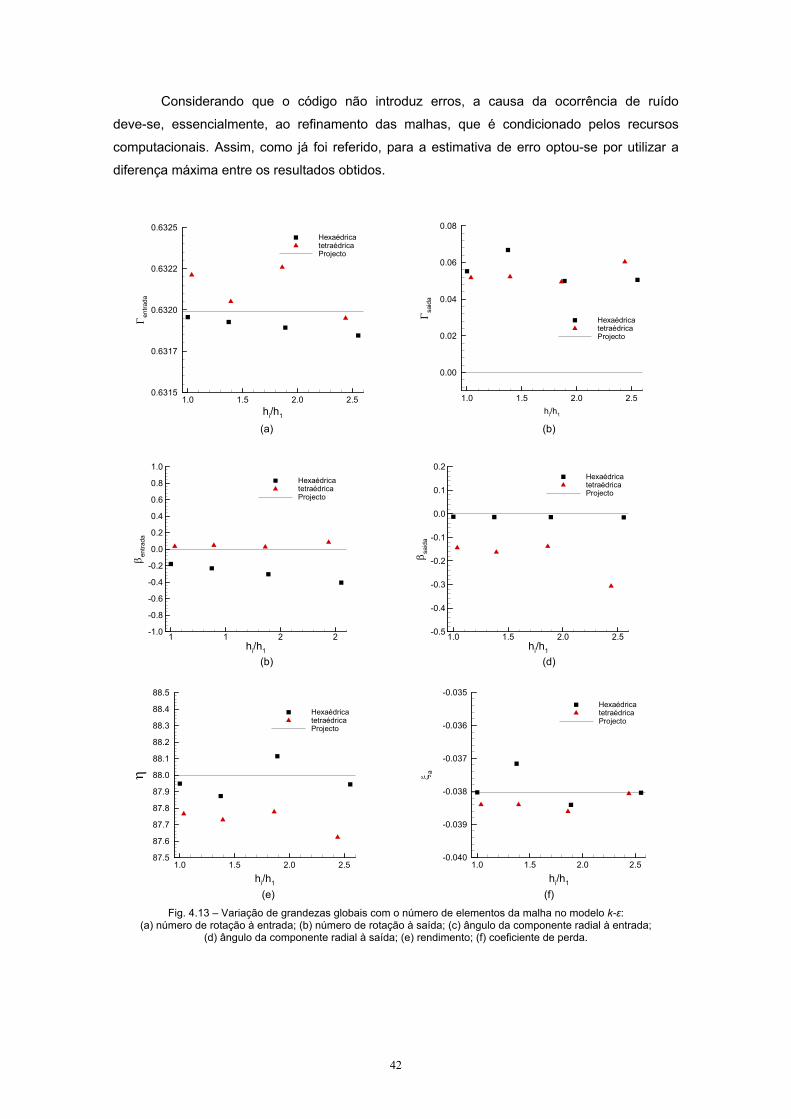
42
Considerando que o código não introduz erros, a causa da ocorrência de ruído
deve-se, essencialmente, ao refinamento das malhas, que é condicionado pelos recursos
computacionais. Assim, como já foi referido, para a estimativa de erro optou-se por utilizar a
diferença máxima entre os resultados obtidos.
hi/h1
Γ ent
rada
1.0 1.5 2.0 2.50.6315
0.6317
0.6320
0.6322
0.6325HexaédricatetraédricaProjecto
hi/h1
Γ sai
da
1.0 1.5 2.0 2.5
0.00
0.02
0.04
0.06
0.08
HexaédricatetraédricaProjecto
(a) (b)
hi/h1
β ent
rada
1 1 2 2-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0HexaédricatetraédricaProjecto
hi/h1
β sai
da
1.0 1.5 2.0 2.5-0.5
-0.4
-0.3
-0.2
-0.1
0.0
0.1
0.2HexaédricatetraédricaProjecto
(b) (d)
hi/h1
η
1.0 1.5 2.0 2.587.5
87.6
87.7
87.8
87.9
88.0
88.1
88.2
88.3
88.4
88.5
HexaédricatetraédricaProjecto
hi/h1
ξ a
1.0 1.5 2.0 2.5-0.040
-0.039
-0.038
-0.037
-0.036
-0.035HexaédricatetraédricaProjecto
(e) (f)
Fig. 4.13 – Variação de grandezas globais com o número de elementos da malha no modelo k-ε: (a) número de rotação à entrada; (b) número de rotação à saída; (c) ângulo da componente radial à entrada;
(d) ângulo da componente radial à saída; (e) rendimento; (f) coeficiente de perda.
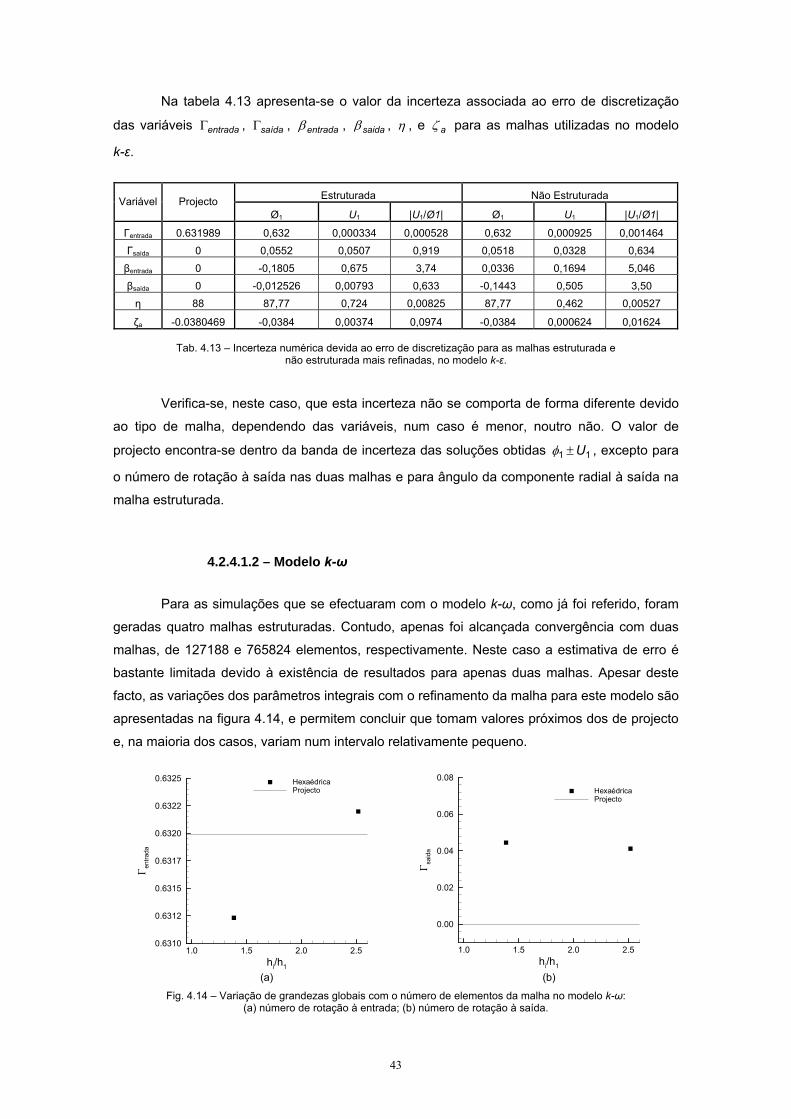
43
Na tabela 4.13 apresenta-se o valor da incerteza associada ao erro de discretização
das variáveis entradaΓ , saídaΓ , entradaβ , saidaβ , η , e aζ para as malhas utilizadas no modelo
k-ε.
Estruturada Não Estruturada Variável Projecto
Ø1 U1 |U1/Ø1| Ø1 U1 |U1/Ø1|
Γentrada 0.631989 0,632 0,000334 0,000528 0,632 0,000925 0,001464 Γsaída 0 0,0552 0,0507 0,919 0,0518 0,0328 0,634 βentrada 0 -0,1805 0,675 3,74 0,0336 0,1694 5,046 βsaída 0 -0,012526 0,00793 0,633 -0,1443 0,505 3,50 η 88 87,77 0,724 0,00825 87,77 0,462 0,00527
ζa -0.0380469 -0,0384 0,00374 0,0974 -0,0384 0,000624 0,01624
Tab. 4.13 – Incerteza numérica devida ao erro de discretização para as malhas estruturada e não estruturada mais refinadas, no modelo k-ε.
Verifica-se, neste caso, que esta incerteza não se comporta de forma diferente devido
ao tipo de malha, dependendo das variáveis, num caso é menor, noutro não. O valor de
projecto encontra-se dentro da banda de incerteza das soluções obtidas 11 U±φ , excepto para
o número de rotação à saída nas duas malhas e para ângulo da componente radial à saída na
malha estruturada.
4.2.4.1.2 – Modelo k-ω
Para as simulações que se efectuaram com o modelo k-ω, como já foi referido, foram
geradas quatro malhas estruturadas. Contudo, apenas foi alcançada convergência com duas
malhas, de 127188 e 765824 elementos, respectivamente. Neste caso a estimativa de erro é
bastante limitada devido à existência de resultados para apenas duas malhas. Apesar deste
facto, as variações dos parâmetros integrais com o refinamento da malha para este modelo são
apresentadas na figura 4.14, e permitem concluir que tomam valores próximos dos de projecto
e, na maioria dos casos, variam num intervalo relativamente pequeno.
hi/h1
Γ ent
rada
1.0 1.5 2.0 2.50.6310
0.6312
0.6315
0.6317
0.6320
0.6322
0.6325 HexaédricaProjecto
hi/h1
Γ sai
da
1.0 1.5 2.0 2.5
0.00
0.02
0.04
0.06
0.08HexaédricaProjecto
(a) (b)
Fig. 4.14 – Variação de grandezas globais com o número de elementos da malha no modelo k-ω: (a) número de rotação à entrada; (b) número de rotação à saída.
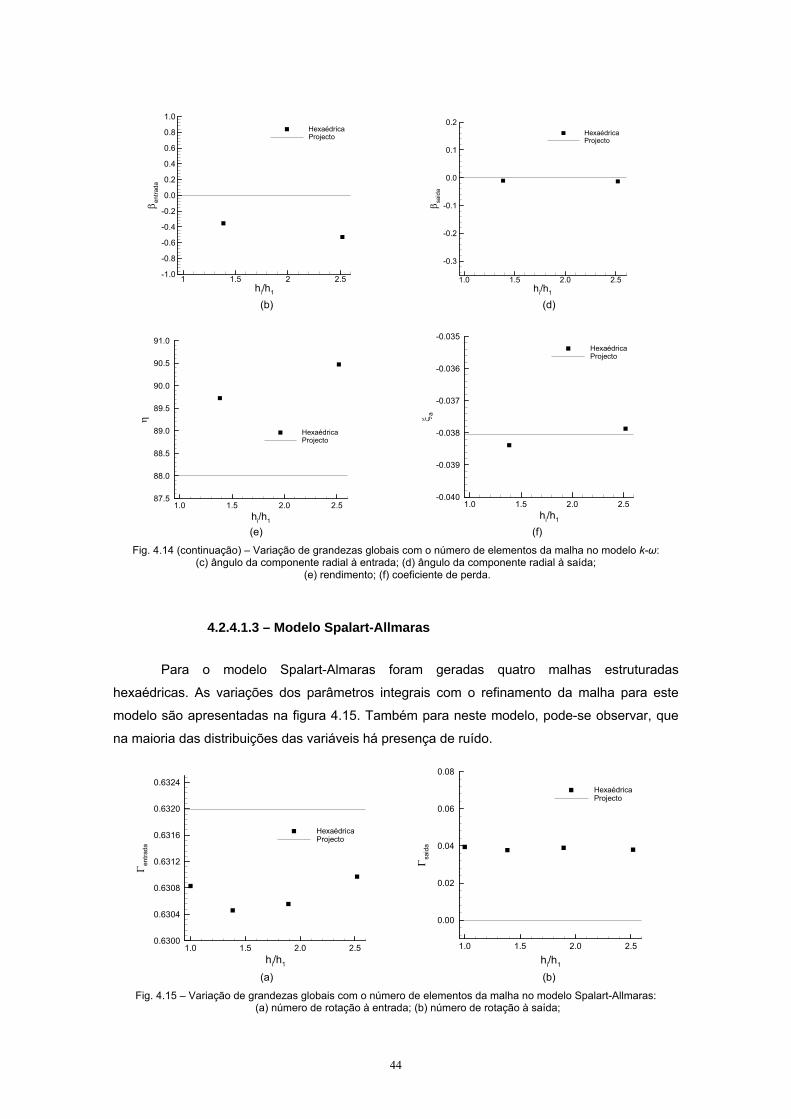
44
hi/h1
β ent
rada
1 1.5 2 2.5-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0HexaédricaProjecto
hi/h1
β sai
da
1.0 1.5 2.0 2.5
-0.3
-0.2
-0.1
0.0
0.1
0.2HexaédricaProjecto
(b) (d)
hi/h1
η
1.0 1.5 2.0 2.587.5
88.0
88.5
89.0
89.5
90.0
90.5
91.0
HexaédricaProjecto
hi/h1
ξ a
1.0 1.5 2.0 2.5-0.040
-0.039
-0.038
-0.037
-0.036
-0.035HexaédricaProjecto
(e) (f)
Fig. 4.14 (continuação) – Variação de grandezas globais com o número de elementos da malha no modelo k-ω: (c) ângulo da componente radial à entrada; (d) ângulo da componente radial à saída;
(e) rendimento; (f) coeficiente de perda.
4.2.4.1.3 – Modelo Spalart-Allmaras
Para o modelo Spalart-Almaras foram geradas quatro malhas estruturadas
hexaédricas. As variações dos parâmetros integrais com o refinamento da malha para este
modelo são apresentadas na figura 4.15. Também para neste modelo, pode-se observar, que
na maioria das distribuições das variáveis há presença de ruído.
hi/h1
Γ ent
rada
1.0 1.5 2.0 2.50.6300
0.6304
0.6308
0.6312
0.6316
0.6320
0.6324
HexaédricaProjecto
hi/h1
Γ sai
da
1.0 1.5 2.0 2.5
0.00
0.02
0.04
0.06
0.08
HexaédricaProjecto
(a) (b)
Fig. 4.15 – Variação de grandezas globais com o número de elementos da malha no modelo Spalart-Allmaras: (a) número de rotação à entrada; (b) número de rotação à saída;
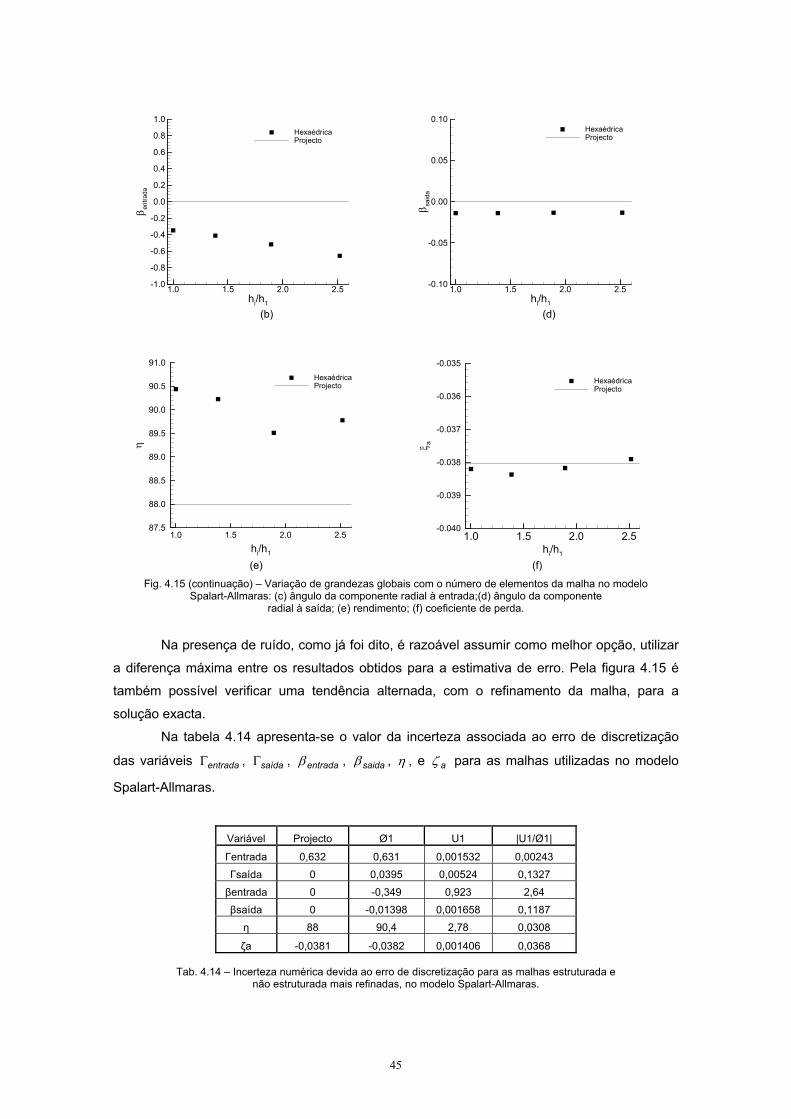
45
hi/h1
β ent
rada
1.0 1.5 2.0 2.5-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0HexaédricaProjecto
hi/h1
β sai
da
1.0 1.5 2.0 2.5-0.10
-0.05
0.00
0.05
0.10HexaédricaProjecto
(b) (d)
hi/h1
η
1.0 1.5 2.0 2.587.5
88.0
88.5
89.0
89.5
90.0
90.5
91.0
HexaédricaProjecto
hi/h1
ξ a
1.0 1.5 2.0 2.5-0.040
-0.039
-0.038
-0.037
-0.036
-0.035
HexaédricaProjecto
(e) (f)
Fig. 4.15 (continuação) – Variação de grandezas globais com o número de elementos da malha no modelo Spalart-Allmaras: (c) ângulo da componente radial à entrada;(d) ângulo da componente
radial à saída; (e) rendimento; (f) coeficiente de perda.
Na presença de ruído, como já foi dito, é razoável assumir como melhor opção, utilizar
a diferença máxima entre os resultados obtidos para a estimativa de erro. Pela figura 4.15 é
também possível verificar uma tendência alternada, com o refinamento da malha, para a
solução exacta.
Na tabela 4.14 apresenta-se o valor da incerteza associada ao erro de discretização
das variáveis entradaΓ , saídaΓ , entradaβ , saidaβ , η , e aζ para as malhas utilizadas no modelo
Spalart-Allmaras.
Variável Projecto Ø1 U1 |U1/Ø1|
Γentrada 0,632 0,631 0,001532 0,00243 Γsaída 0 0,0395 0,00524 0,1327 βentrada 0 -0,349 0,923 2,64 βsaída 0 -0,01398 0,001658 0,1187
η 88 90,4 2,78 0,0308
ζa -0,0381 -0,0382 0,001406 0,0368
Tab. 4.14 – Incerteza numérica devida ao erro de discretização para as malhas estruturada e não estruturada mais refinadas, no modelo Spalart-Allmaras.
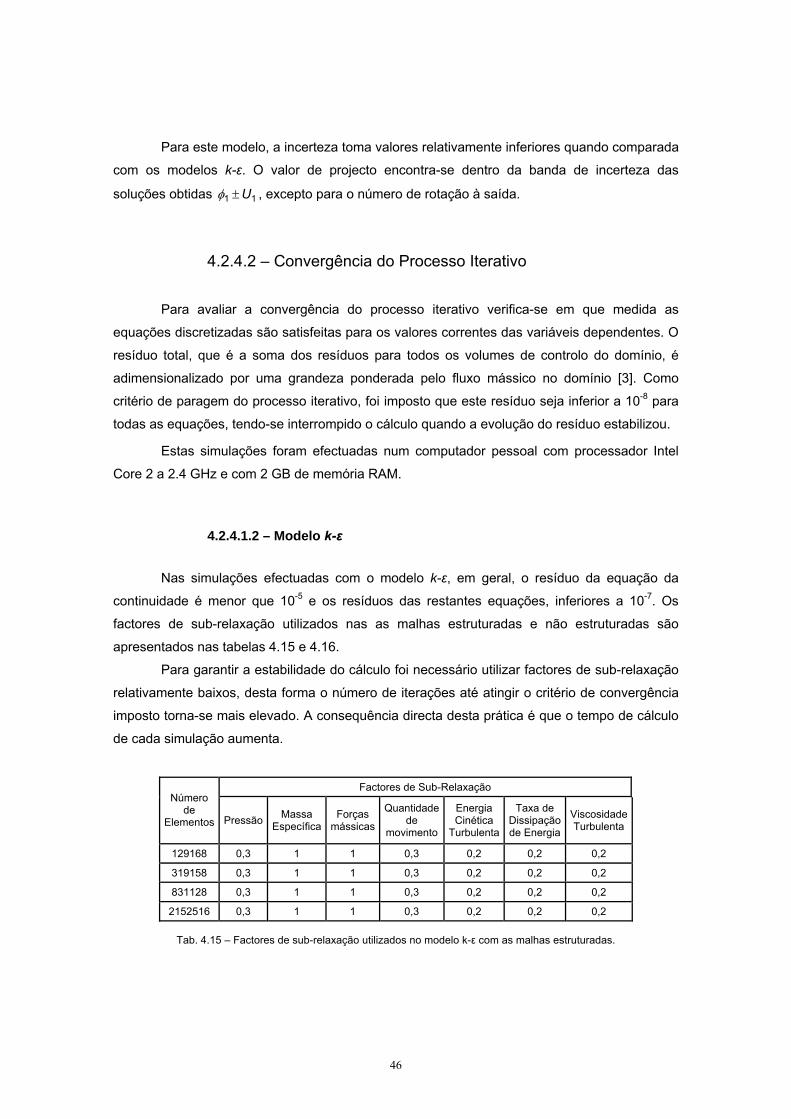
46
Para este modelo, a incerteza toma valores relativamente inferiores quando comparada
com os modelos k-ε. O valor de projecto encontra-se dentro da banda de incerteza das
soluções obtidas 11 U±φ , excepto para o número de rotação à saída.
4.2.4.2 – Convergência do Processo Iterativo
Para avaliar a convergência do processo iterativo verifica-se em que medida as
equações discretizadas são satisfeitas para os valores correntes das variáveis dependentes. O
resíduo total, que é a soma dos resíduos para todos os volumes de controlo do domínio, é
adimensionalizado por uma grandeza ponderada pelo fluxo mássico no domínio [3]. Como
critério de paragem do processo iterativo, foi imposto que este resíduo seja inferior a 10-8 para
todas as equações, tendo-se interrompido o cálculo quando a evolução do resíduo estabilizou.
Estas simulações foram efectuadas num computador pessoal com processador Intel
Core 2 a 2.4 GHz e com 2 GB de memória RAM.
4.2.4.1.2 – Modelo k-ε
Nas simulações efectuadas com o modelo k-ε, em geral, o resíduo da equação da
continuidade é menor que 10-5 e os resíduos das restantes equações, inferiores a 10-7. Os
factores de sub-relaxação utilizados nas as malhas estruturadas e não estruturadas são
apresentados nas tabelas 4.15 e 4.16.
Para garantir a estabilidade do cálculo foi necessário utilizar factores de sub-relaxação
relativamente baixos, desta forma o número de iterações até atingir o critério de convergência
imposto torna-se mais elevado. A consequência directa desta prática é que o tempo de cálculo
de cada simulação aumenta.
Factores de Sub-Relaxação Número
de Elementos Pressão Massa
Específica Forças
mássicas
Quantidade de
movimento
Energia Cinética
Turbulenta
Taxa de Dissipação de Energia
Viscosidade Turbulenta
129168 0,3 1 1 0,3 0,2 0,2 0,2
319158 0,3 1 1 0,3 0,2 0,2 0,2
831128 0,3 1 1 0,3 0,2 0,2 0,2
2152516 0,3 1 1 0,3 0,2 0,2 0,2
Tab. 4.15 – Factores de sub-relaxação utilizados no modelo k-ε com as malhas estruturadas.
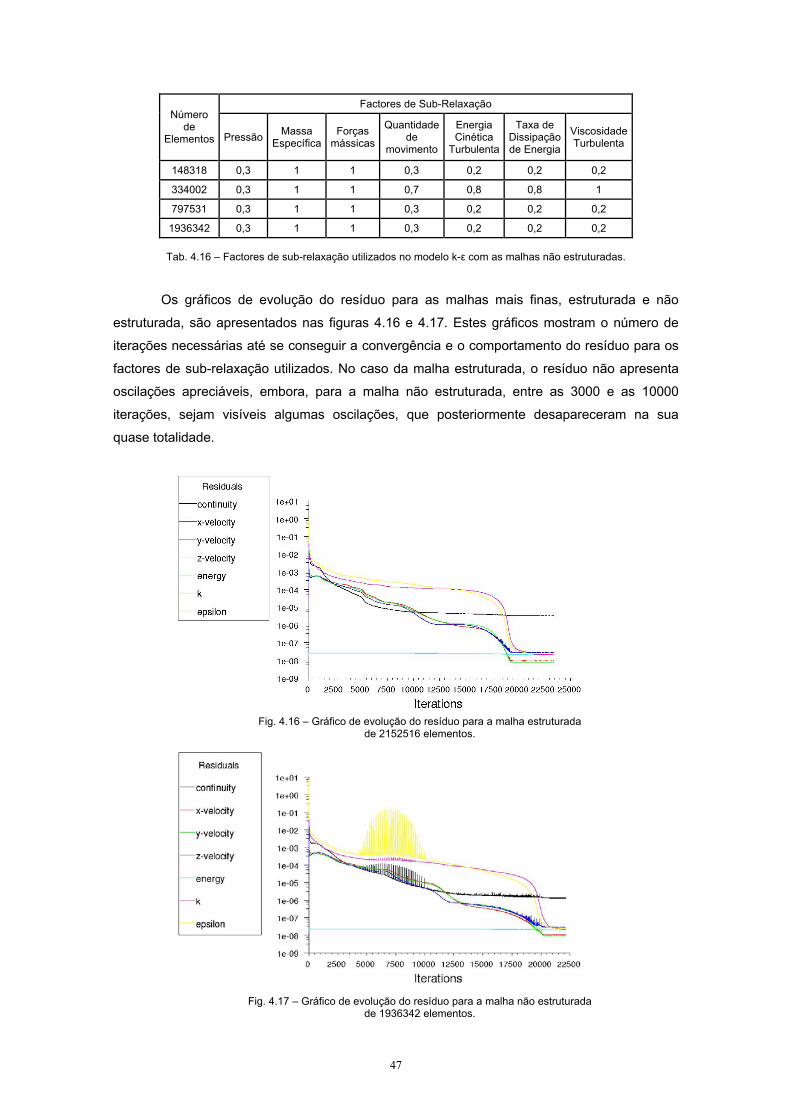
47
Factores de Sub-Relaxação Número
de Elementos Pressão Massa
Específica Forças
mássicas
Quantidade de
movimento
Energia Cinética
Turbulenta
Taxa de Dissipação de Energia
Viscosidade Turbulenta
148318 0,3 1 1 0,3 0,2 0,2 0,2
334002 0,3 1 1 0,7 0,8 0,8 1
797531 0,3 1 1 0,3 0,2 0,2 0,2
1936342 0,3 1 1 0,3 0,2 0,2 0,2
Tab. 4.16 – Factores de sub-relaxação utilizados no modelo k-ε com as malhas não estruturadas.
Os gráficos de evolução do resíduo para as malhas mais finas, estruturada e não
estruturada, são apresentados nas figuras 4.16 e 4.17. Estes gráficos mostram o número de
iterações necessárias até se conseguir a convergência e o comportamento do resíduo para os
factores de sub-relaxação utilizados. No caso da malha estruturada, o resíduo não apresenta
oscilações apreciáveis, embora, para a malha não estruturada, entre as 3000 e as 10000
iterações, sejam visíveis algumas oscilações, que posteriormente desapareceram na sua
quase totalidade.
Fig. 4.16 – Gráfico de evolução do resíduo para a malha estruturada
de 2152516 elementos.
Fig. 4.17 – Gráfico de evolução do resíduo para a malha não estruturada
de 1936342 elementos.
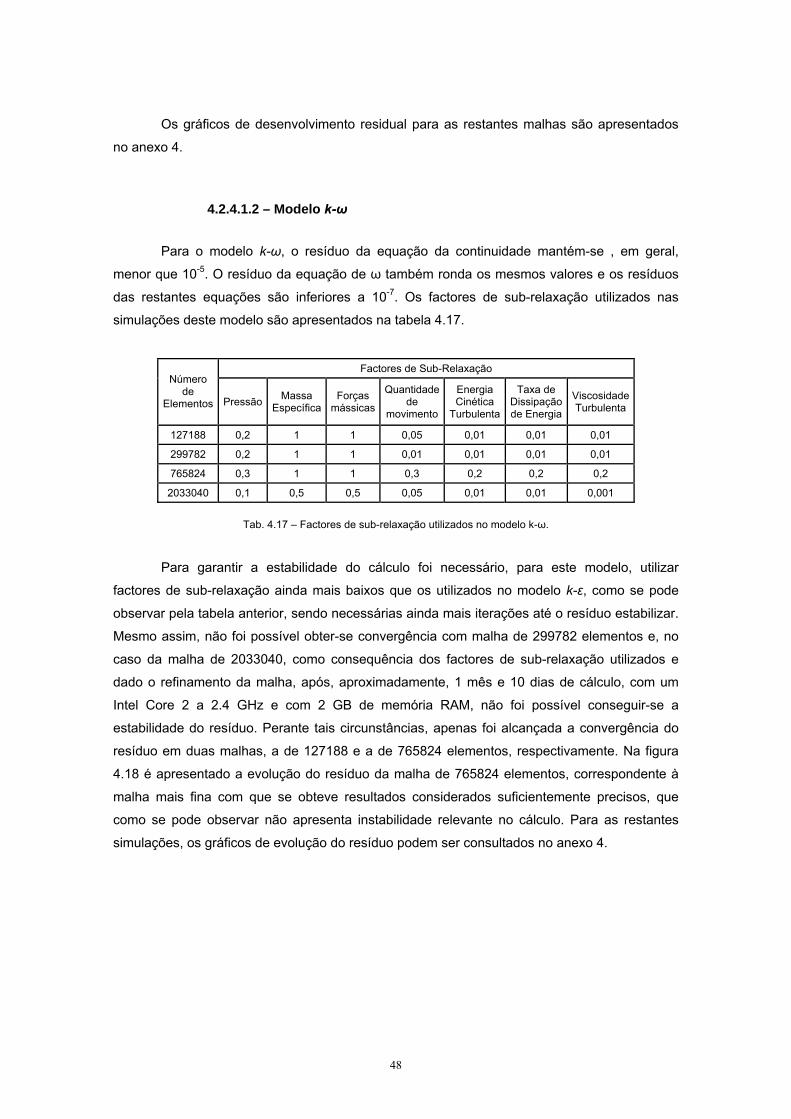
48
Os gráficos de desenvolvimento residual para as restantes malhas são apresentados
no anexo 4.
4.2.4.1.2 – Modelo k-ω
Para o modelo k-ω, o resíduo da equação da continuidade mantém-se , em geral,
menor que 10-5. O resíduo da equação de ω também ronda os mesmos valores e os resíduos
das restantes equações são inferiores a 10-7. Os factores de sub-relaxação utilizados nas
simulações deste modelo são apresentados na tabela 4.17.
Factores de Sub-Relaxação Número
de Elementos Pressão Massa
Específica Forças
mássicas
Quantidade de
movimento
Energia Cinética
Turbulenta
Taxa de Dissipação de Energia
Viscosidade Turbulenta
127188 0,2 1 1 0,05 0,01 0,01 0,01
299782 0,2 1 1 0,01 0,01 0,01 0,01
765824 0,3 1 1 0,3 0,2 0,2 0,2
2033040 0,1 0,5 0,5 0,05 0,01 0,01 0,001
Tab. 4.17 – Factores de sub-relaxação utilizados no modelo k-ω.
Para garantir a estabilidade do cálculo foi necessário, para este modelo, utilizar
factores de sub-relaxação ainda mais baixos que os utilizados no modelo k-ε, como se pode
observar pela tabela anterior, sendo necessárias ainda mais iterações até o resíduo estabilizar.
Mesmo assim, não foi possível obter-se convergência com malha de 299782 elementos e, no
caso da malha de 2033040, como consequência dos factores de sub-relaxação utilizados e
dado o refinamento da malha, após, aproximadamente, 1 mês e 10 dias de cálculo, com um
Intel Core 2 a 2.4 GHz e com 2 GB de memória RAM, não foi possível conseguir-se a
estabilidade do resíduo. Perante tais circunstâncias, apenas foi alcançada a convergência do
resíduo em duas malhas, a de 127188 e a de 765824 elementos, respectivamente. Na figura
4.18 é apresentado a evolução do resíduo da malha de 765824 elementos, correspondente à
malha mais fina com que se obteve resultados considerados suficientemente precisos, que
como se pode observar não apresenta instabilidade relevante no cálculo. Para as restantes
simulações, os gráficos de evolução do resíduo podem ser consultados no anexo 4.
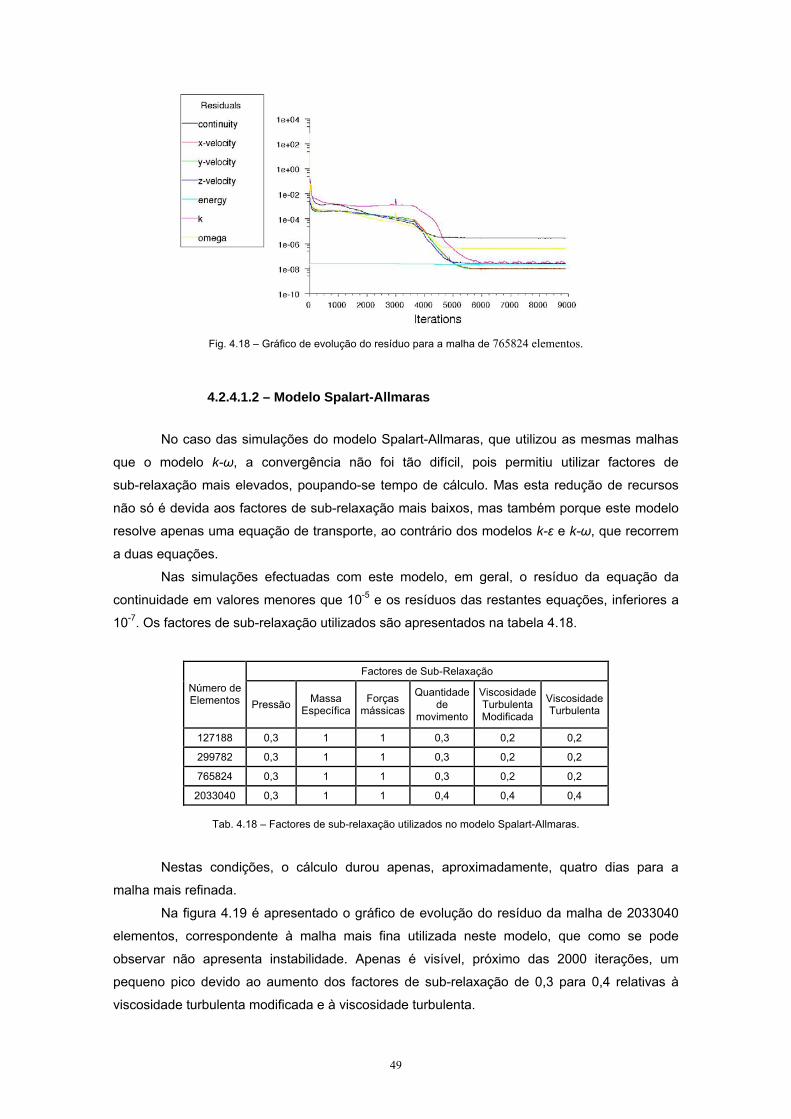
49
Fig. 4.18 – Gráfico de evolução do resíduo para a malha de 765824 elementos.
4.2.4.1.2 – Modelo Spalart-Allmaras
No caso das simulações do modelo Spalart-Allmaras, que utilizou as mesmas malhas
que o modelo k-ω, a convergência não foi tão difícil, pois permitiu utilizar factores de
sub-relaxação mais elevados, poupando-se tempo de cálculo. Mas esta redução de recursos
não só é devida aos factores de sub-relaxação mais baixos, mas também porque este modelo
resolve apenas uma equação de transporte, ao contrário dos modelos k-ε e k-ω, que recorrem
a duas equações.
Nas simulações efectuadas com este modelo, em geral, o resíduo da equação da
continuidade em valores menores que 10-5 e os resíduos das restantes equações, inferiores a
10-7. Os factores de sub-relaxação utilizados são apresentados na tabela 4.18.
Factores de Sub-Relaxação Número de Elementos Pressão Massa
EspecíficaForças
mássicas
Quantidade de
movimento
Viscosidade Turbulenta Modificada
Viscosidade Turbulenta
127188 0,3 1 1 0,3 0,2 0,2
299782 0,3 1 1 0,3 0,2 0,2
765824 0,3 1 1 0,3 0,2 0,2
2033040 0,3 1 1 0,4 0,4 0,4
Tab. 4.18 – Factores de sub-relaxação utilizados no modelo Spalart-Allmaras.
Nestas condições, o cálculo durou apenas, aproximadamente, quatro dias para a
malha mais refinada.
Na figura 4.19 é apresentado o gráfico de evolução do resíduo da malha de 2033040
elementos, correspondente à malha mais fina utilizada neste modelo, que como se pode
observar não apresenta instabilidade. Apenas é visível, próximo das 2000 iterações, um
pequeno pico devido ao aumento dos factores de sub-relaxação de 0,3 para 0,4 relativas à
viscosidade turbulenta modificada e à viscosidade turbulenta.
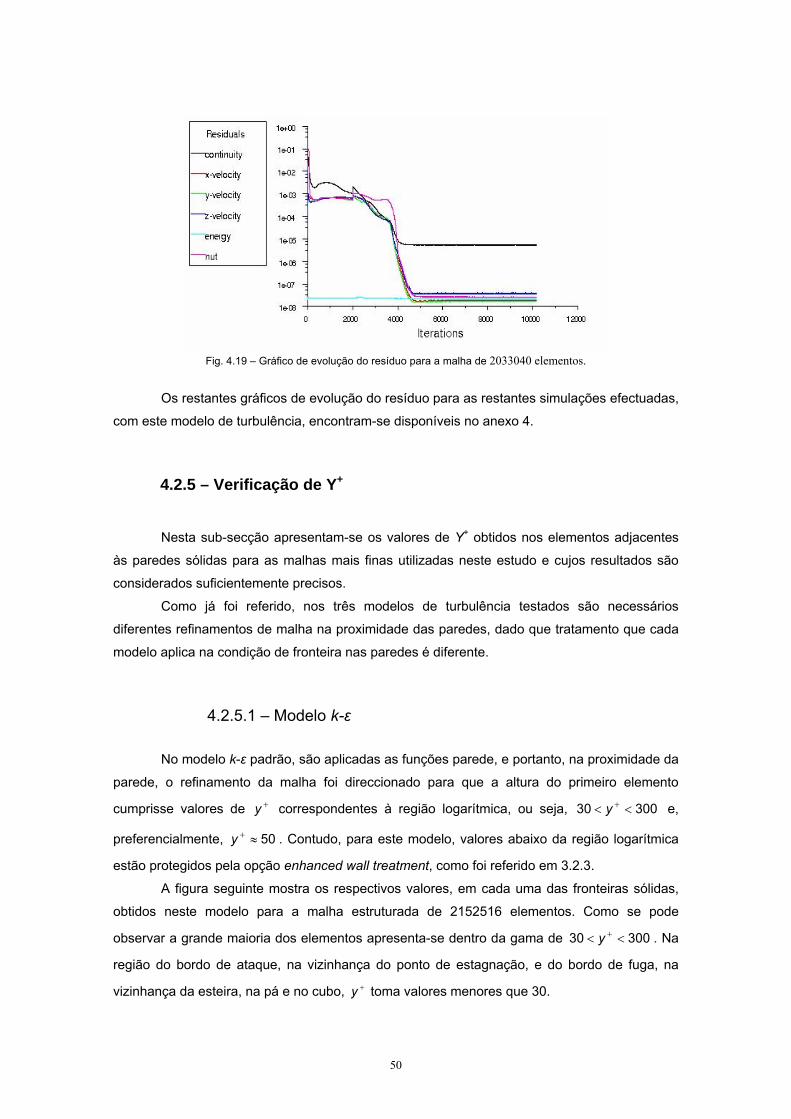
50
Fig. 4.19 – Gráfico de evolução do resíduo para a malha de 2033040 elementos.
Os restantes gráficos de evolução do resíduo para as restantes simulações efectuadas,
com este modelo de turbulência, encontram-se disponíveis no anexo 4.
4.2.5 – Verificação de Y+
Nesta sub-secção apresentam-se os valores de Y+ obtidos nos elementos adjacentes
às paredes sólidas para as malhas mais finas utilizadas neste estudo e cujos resultados são
considerados suficientemente precisos.
Como já foi referido, nos três modelos de turbulência testados são necessários
diferentes refinamentos de malha na proximidade das paredes, dado que tratamento que cada
modelo aplica na condição de fronteira nas paredes é diferente.
4.2.5.1 – Modelo k-ε
No modelo k-ε padrão, são aplicadas as funções parede, e portanto, na proximidade da
parede, o refinamento da malha foi direccionado para que a altura do primeiro elemento
cumprisse valores de +y correspondentes à região logarítmica, ou seja, 30030 << +y e,
preferencialmente, 50≈+y . Contudo, para este modelo, valores abaixo da região logarítmica
estão protegidos pela opção enhanced wall treatment, como foi referido em 3.2.3.
A figura seguinte mostra os respectivos valores, em cada uma das fronteiras sólidas,
obtidos neste modelo para a malha estruturada de 2152516 elementos. Como se pode
observar a grande maioria dos elementos apresenta-se dentro da gama de 30030 << +y . Na
região do bordo de ataque, na vizinhança do ponto de estagnação, e do bordo de fuga, na
vizinhança da esteira, na pá e no cubo, +y toma valores menores que 30.
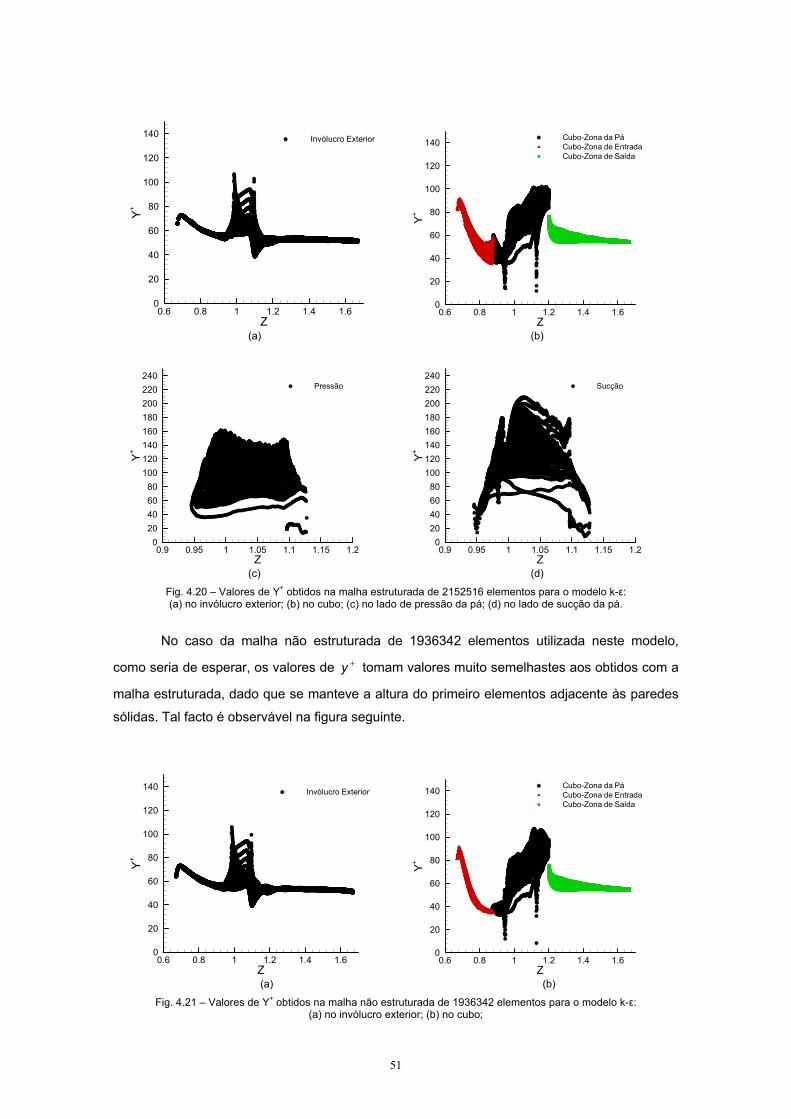
51
Z
Y+
0.6 0.8 1 1.2 1.4 1.60
20
40
60
80
100
120
140 Invólucro Exterior
Z
Y+
0.6 0.8 1 1.2 1.4 1.60
20
40
60
80
100
120
140 Cubo-Zona da PáCubo-Zona de EntradaCubo-Zona de Saída
(a) (b)
Z
Y+
0.9 0.95 1 1.05 1.1 1.15 1.20
20406080
100120140160180200220240
Pressão
Z
Y+
0.9 0.95 1 1.05 1.1 1.15 1.20
20406080
100120140160180200220240
Sucção
(c) (d)
Fig. 4.20 – Valores de Y+ obtidos na malha estruturada de 2152516 elementos para o modelo k-ε: (a) no invólucro exterior; (b) no cubo; (c) no lado de pressão da pá; (d) no lado de sucção da pá.
No caso da malha não estruturada de 1936342 elementos utilizada neste modelo,
como seria de esperar, os valores de +y tomam valores muito semelhastes aos obtidos com a
malha estruturada, dado que se manteve a altura do primeiro elementos adjacente às paredes
sólidas. Tal facto é observável na figura seguinte.
Z
Y+
0.6 0.8 1 1.2 1.4 1.60
20
40
60
80
100
120
140 Invólucro Exterior
Z
Y+
0.6 0.8 1 1.2 1.4 1.60
20
40
60
80
100
120
140 Cubo-Zona da PáCubo-Zona de EntradaCubo-Zona de Saída
(a) (b)
Fig. 4.21 – Valores de Y+ obtidos na malha não estruturada de 1936342 elementos para o modelo k-ε: (a) no invólucro exterior; (b) no cubo;
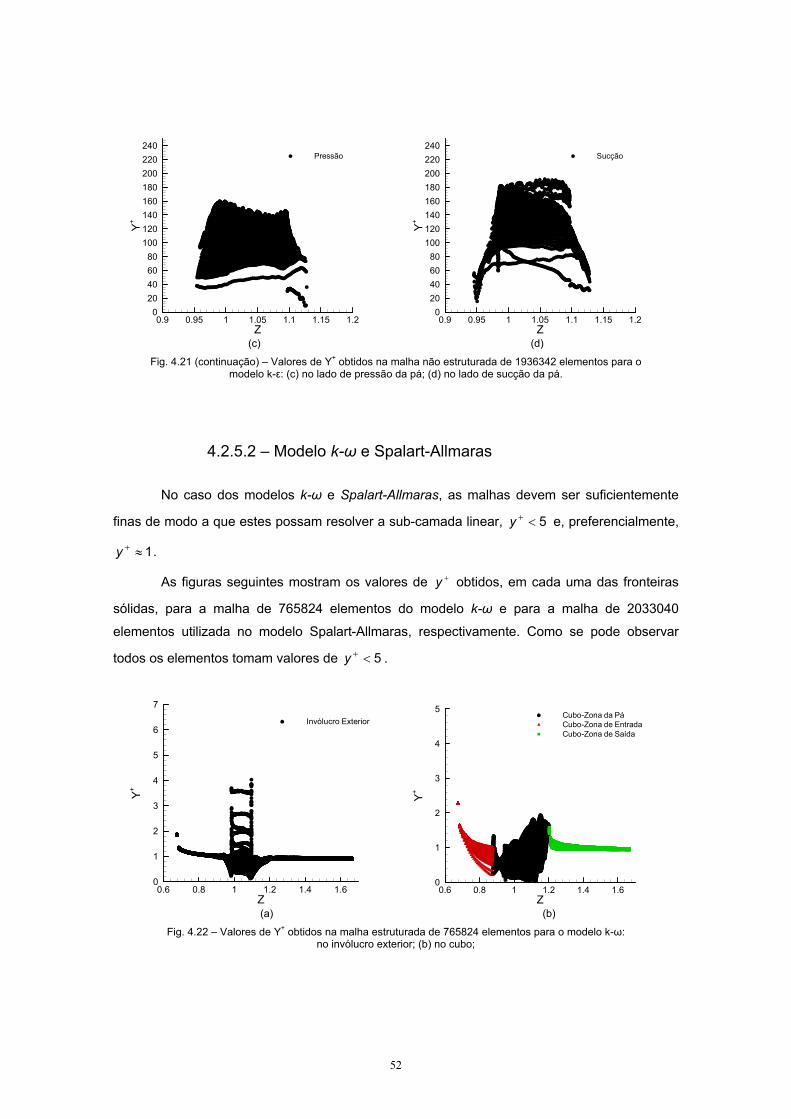
52
Z
Y+
0.9 0.95 1 1.05 1.1 1.15 1.20
20406080
100120140160180200220240
Pressão
Z
Y+
0.9 0.95 1 1.05 1.1 1.15 1.20
20406080
100120140160180200220240
Sucção
(c) (d)
Fig. 4.21 (continuação) – Valores de Y+ obtidos na malha não estruturada de 1936342 elementos para o modelo k-ε: (c) no lado de pressão da pá; (d) no lado de sucção da pá.
4.2.5.2 – Modelo k-ω e Spalart-Allmaras
No caso dos modelos k-ω e Spalart-Allmaras, as malhas devem ser suficientemente
finas de modo a que estes possam resolver a sub-camada linear, 5<+y e, preferencialmente,
1≈+y .
As figuras seguintes mostram os valores de +y obtidos, em cada uma das fronteiras
sólidas, para a malha de 765824 elementos do modelo k-ω e para a malha de 2033040
elementos utilizada no modelo Spalart-Allmaras, respectivamente. Como se pode observar
todos os elementos tomam valores de 5<+y .
Z
Y+
0.6 0.8 1 1.2 1.4 1.60
1
2
3
4
5
6
7
Invólucro Exterior
Z
Y+
0.6 0.8 1 1.2 1.4 1.60
1
2
3
4
5Cubo-Zona da PáCubo-Zona de EntradaCubo-Zona de Saída
(a) (b)
Fig. 4.22 – Valores de Y+ obtidos na malha estruturada de 765824 elementos para o modelo k-ω: no invólucro exterior; (b) no cubo;
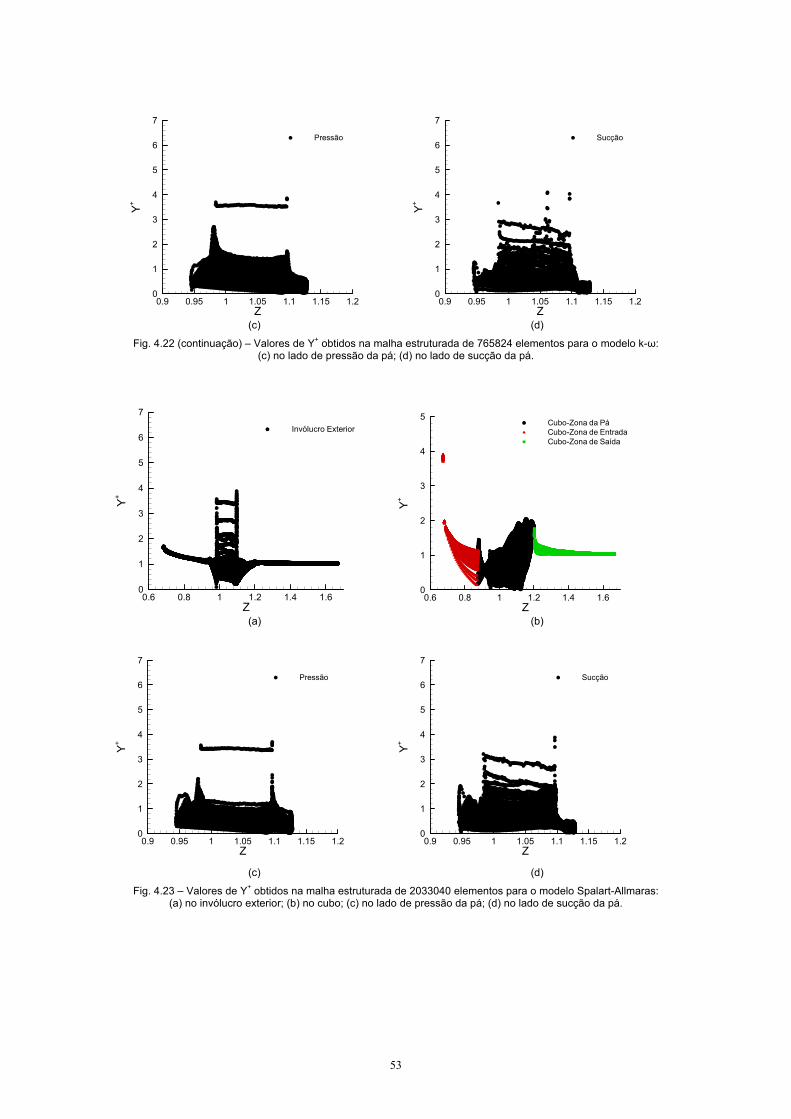
53
Z
Y+
0.9 0.95 1 1.05 1.1 1.15 1.20
1
2
3
4
5
6
7
Pressão
Z
Y+
0.9 0.95 1 1.05 1.1 1.15 1.20
1
2
3
4
5
6
7
Sucção
(c) (d)
Fig. 4.22 (continuação) – Valores de Y+ obtidos na malha estruturada de 765824 elementos para o modelo k-ω: (c) no lado de pressão da pá; (d) no lado de sucção da pá.
Z
Y+
0.6 0.8 1 1.2 1.4 1.60
1
2
3
4
5
6
7
Invólucro Exterior
Z
Y+
0.6 0.8 1 1.2 1.4 1.60
1
2
3
4
5Cubo-Zona da PáCubo-Zona de EntradaCubo-Zona de Saída
(a) (b)
Z
Y+
0.9 0.95 1 1.05 1.1 1.15 1.20
1
2
3
4
5
6
7
Pressão
Z
Y+
0.9 0.95 1 1.05 1.1 1.15 1.20
1
2
3
4
5
6
7
Sucção
(c) (d)
Fig. 4.23 – Valores de Y+ obtidos na malha estruturada de 2033040 elementos para o modelo Spalart-Allmaras: (a) no invólucro exterior; (b) no cubo; (c) no lado de pressão da pá; (d) no lado de sucção da pá.
54
4.2.6 – Resultados Obtidos
Nesta sub-secção são apresentados os resultados obtidos com o código FLUENT para
o escoamento viscoso, na roda da turbina, utilizando os três modelos de turbulência referidos
anteriormente. Os resultados apresentados foram calculados com as malhas mais refinadas
com as quais se obteve resultados considerados suficientemente precisos. Ou seja, para o
modelo k-ε a malha não estruturada de 1936342 elementos e a malha estruturada de 2152516
elementos, para o modelo Spalart-Allmaras a malha estruturada de 2033040 e para o modelo
k-ω a malha estruturada de 765824. Esta última malha apresenta um refinamento mais
grosseiro, quando comparada com as utilizadas nos outros modelos de turbulência, dado que,
como já referido na sub-secção 4.2.4.1.2, corresponde à malha mais refinada com que se
conseguiu a convergência desejada.
Começa-se por se apresentar as médias axissimétricas das componentes da
velocidade e da quantidade de movimento, nas secções de entrada e de saída. Em todos os
gráficos, os valores apresentados referem-se a valores nas células e não nos nós e, portanto,
junto das paredes, os valores das velocidades não tomam valores nulos, contudo, verifica-se
uma tendência para esse valor.
Todas as médias circunferenciais da velocidade apresentadas neste trabalho são
adimensionalizadas com a velocidade axial média na secção de entrada da roda e, a
quantidade de movimento angular, é ainda adimensionalizada pelo raio da roda.
Os perfis das médias axissimétricas da componente axial da velocidade, *aV , na
secção de entrada, são apresentados nas figuras 4.24a), 4.24b) e 4.24c), onde é possível
observar um aumento da velocidade axial na secção de entrada junto das fronteiras sólidas
(cubo e invólucro exterior). Nos modelos k-ω e Spalart-Allmaras, este aumento é mais
acentuado do que no modelo k-ε, pois nos dois primeiros é resolvida a sub-camada laminar e
no modelo k-ε são aplicadas funções de parede. O seu propósito é compensar o défice de
caudal junto da parede, ou seja, satisfazer a condição de fronteira de entrada – velocidade
axial uniforme – cumprido assim o caudal desejado.
Na figura 4.24d) são apresentados os perfis das médias axissimétricas da componente
axial mas numa secção 8 centímetros a jusante da secção de entrada. O efeito da camada
limite obriga a um aumento de 3% desta componente da velocidade, na região central, sendo
também aqui visível, a diferença entre o tratamento, na vizinhança das paredes, dos diferentes
modelos de turbulência.
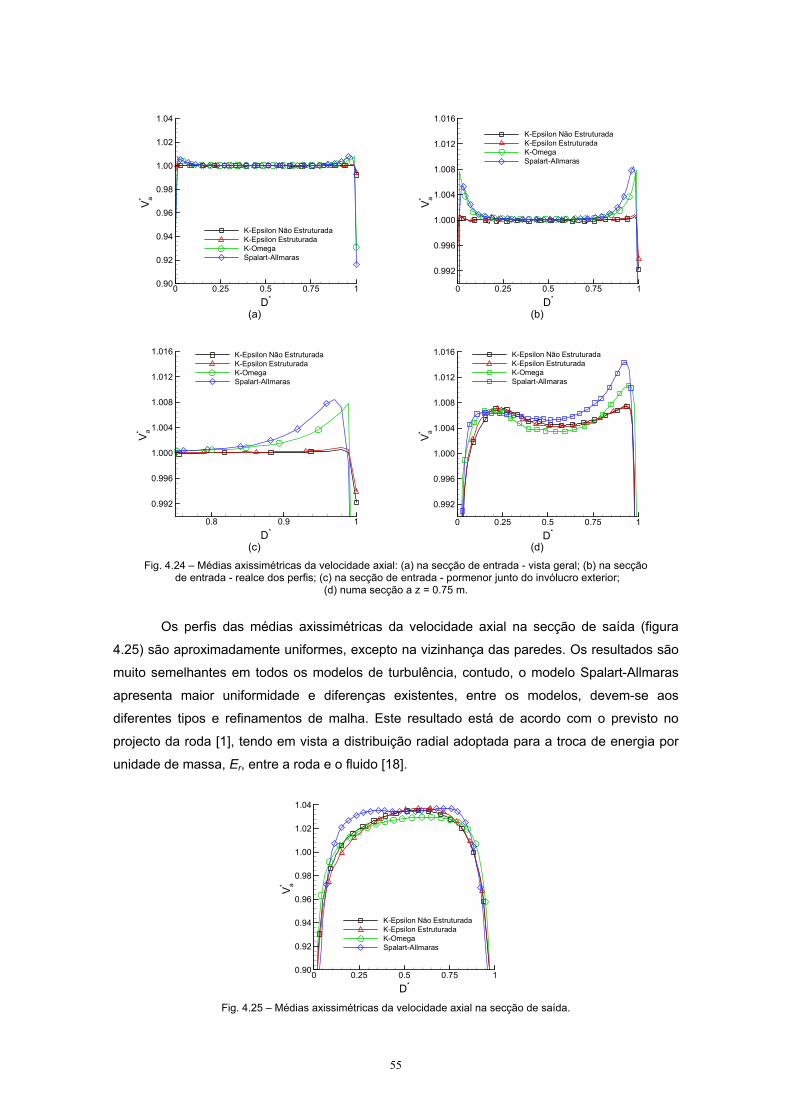
55
D*
Va*
0 0.25 0.5 0.75 10.90
0.92
0.94
0.96
0.98
1.00
1.02
1.04
K-Epsilon Não EstruturadaK-Epsilon EstruturadaK-OmegaSpalart-Allmaras
D*
Va*
0 0.25 0.5 0.75 1
0.992
0.996
1.000
1.004
1.008
1.012
1.016
K-Epsilon Não EstruturadaK-Epsilon EstruturadaK-OmegaSpalart-Allmaras
(a) (b)
D*
Va*
0.8 0.9 1
0.992
0.996
1.000
1.004
1.008
1.012
1.016 K-Epsilon Não EstruturadaK-Epsilon EstruturadaK-OmegaSpalart-Allmaras
D*
V a*
0 0.25 0.5 0.75 1
0.992
0.996
1.000
1.004
1.008
1.012
1.016 K-Epsilon Não EstruturadaK-Epsilon EstruturadaK-OmegaSpalart-Allmaras
(c) (d)
Fig. 4.24 – Médias axissimétricas da velocidade axial: (a) na secção de entrada - vista geral; (b) na secção de entrada - realce dos perfis; (c) na secção de entrada - pormenor junto do invólucro exterior;
(d) numa secção a z = 0.75 m.
Os perfis das médias axissimétricas da velocidade axial na secção de saída (figura
4.25) são aproximadamente uniformes, excepto na vizinhança das paredes. Os resultados são
muito semelhantes em todos os modelos de turbulência, contudo, o modelo Spalart-Allmaras
apresenta maior uniformidade e diferenças existentes, entre os modelos, devem-se aos
diferentes tipos e refinamentos de malha. Este resultado está de acordo com o previsto no
projecto da roda [1], tendo em vista a distribuição radial adoptada para a troca de energia por
unidade de massa, Er, entre a roda e o fluido [18].
D*
V a*
0 0.25 0.5 0.75 10.90
0.92
0.94
0.96
0.98
1.00
1.02
1.04
K-Epsilon Não EstruturadaK-Epsilon EstruturadaK-OmegaSpalart-Allmaras
Fig. 4.25 – Médias axissimétricas da velocidade axial na secção de saída.
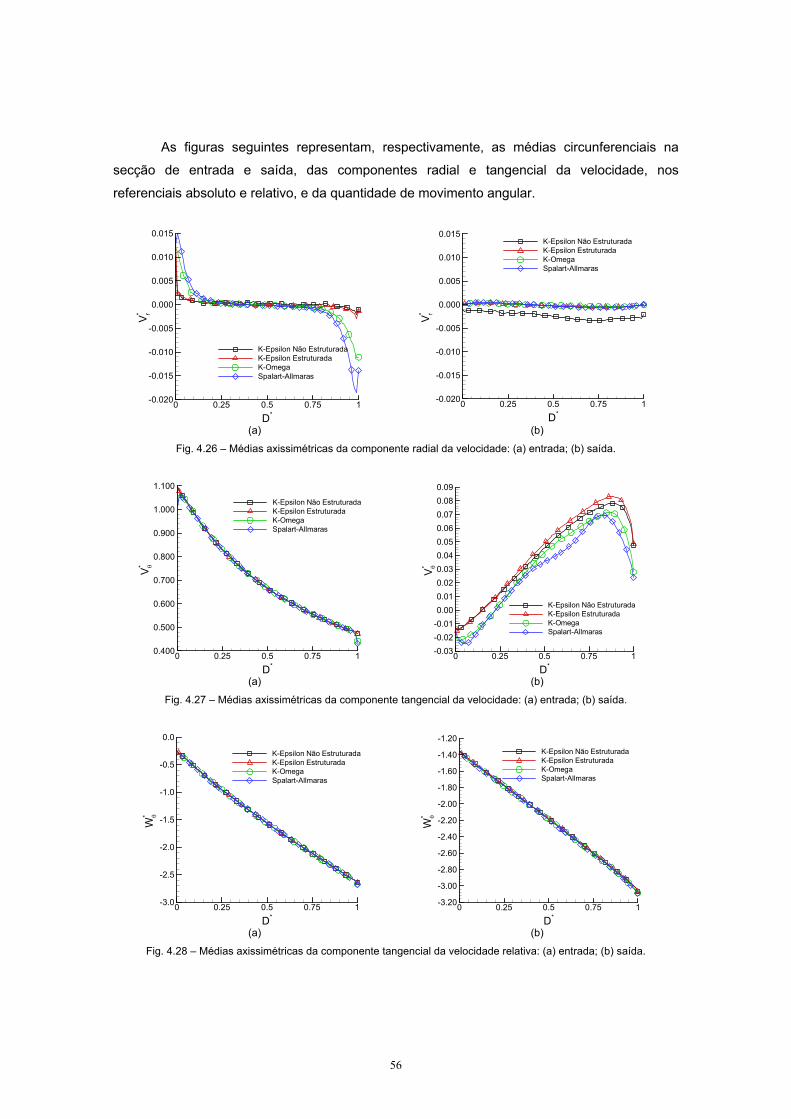
56
As figuras seguintes representam, respectivamente, as médias circunferenciais na
secção de entrada e saída, das componentes radial e tangencial da velocidade, nos
referenciais absoluto e relativo, e da quantidade de movimento angular.
D*
V r*
0 0.25 0.5 0.75 1-0.020
-0.015
-0.010
-0.005
0.000
0.005
0.010
0.015
K-Epsilon Não EstruturadaK-Epsilon EstruturadaK-OmegaSpalart-Allmaras
D*
V r*
0 0.25 0.5 0.75 1-0.020
-0.015
-0.010
-0.005
0.000
0.005
0.010
0.015K-Epsilon Não EstruturadaK-Epsilon EstruturadaK-OmegaSpalart-Allmaras
(a) (b)
Fig. 4.26 – Médias axissimétricas da componente radial da velocidade: (a) entrada; (b) saída.
D*
Vθ*
0 0.25 0.5 0.75 10.400
0.500
0.600
0.700
0.800
0.900
1.000
1.100
K-Epsilon Não EstruturadaK-Epsilon EstruturadaK-OmegaSpalart-Allmaras
D*
Vθ*
0 0.25 0.5 0.75 1-0.03-0.02-0.010.000.010.020.030.040.050.060.070.080.09
K-Epsilon Não EstruturadaK-Epsilon EstruturadaK-OmegaSpalart-Allmaras
(a) (b)
Fig. 4.27 – Médias axissimétricas da componente tangencial da velocidade: (a) entrada; (b) saída.
D*
Wθ*
0 0.25 0.5 0.75 1-3.0
-2.5
-2.0
-1.5
-1.0
-0.5
0.0
K-Epsilon Não EstruturadaK-Epsilon EstruturadaK-OmegaSpalart-Allmaras
D*
Wθ*
0 0.25 0.5 0.75 1-3.20
-3.00
-2.80
-2.60
-2.40
-2.20
-2.00
-1.80
-1.60
-1.40
-1.20K-Epsilon Não EstruturadaK-Epsilon EstruturadaK-OmegaSpalart-Allmaras
(a) (b)
Fig. 4.28 – Médias axissimétricas da componente tangencial da velocidade relativa: (a) entrada; (b) saída.
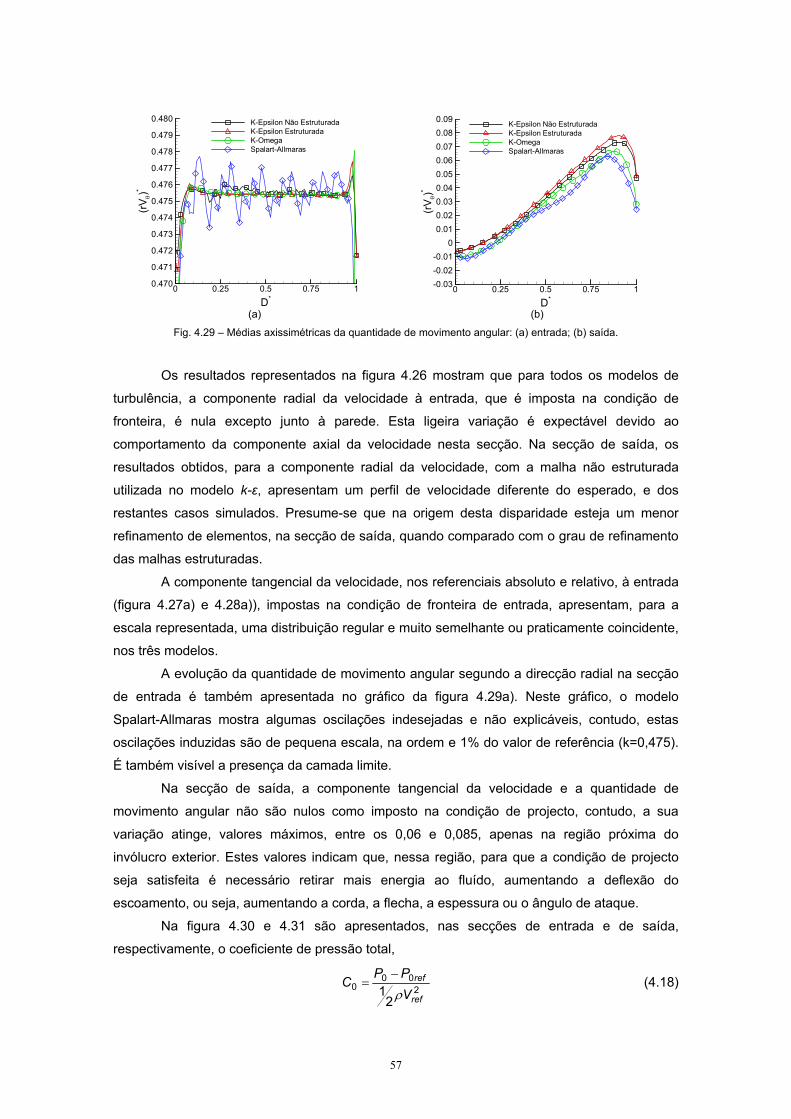
57
D*
(rV θ
)*
0 0.25 0.5 0.75 10.470
0.471
0.472
0.473
0.474
0.475
0.476
0.477
0.478
0.479
0.480 K-Epsilon Não EstruturadaK-Epsilon EstruturadaK-OmegaSpalart-Allmaras
D*
(rV
θ)*
0 0.25 0.5 0.75 1-0.03-0.02-0.01
00.010.020.030.040.050.060.070.080.09 K-Epsilon Não Estruturada
K-Epsilon EstruturadaK-OmegaSpalart-Allmaras
(a) (b)
Fig. 4.29 – Médias axissimétricas da quantidade de movimento angular: (a) entrada; (b) saída.
Os resultados representados na figura 4.26 mostram que para todos os modelos de
turbulência, a componente radial da velocidade à entrada, que é imposta na condição de
fronteira, é nula excepto junto à parede. Esta ligeira variação é expectável devido ao
comportamento da componente axial da velocidade nesta secção. Na secção de saída, os
resultados obtidos, para a componente radial da velocidade, com a malha não estruturada
utilizada no modelo k-ε, apresentam um perfil de velocidade diferente do esperado, e dos
restantes casos simulados. Presume-se que na origem desta disparidade esteja um menor
refinamento de elementos, na secção de saída, quando comparado com o grau de refinamento
das malhas estruturadas.
A componente tangencial da velocidade, nos referenciais absoluto e relativo, à entrada
(figura 4.27a) e 4.28a)), impostas na condição de fronteira de entrada, apresentam, para a
escala representada, uma distribuição regular e muito semelhante ou praticamente coincidente,
nos três modelos.
A evolução da quantidade de movimento angular segundo a direcção radial na secção
de entrada é também apresentada no gráfico da figura 4.29a). Neste gráfico, o modelo
Spalart-Allmaras mostra algumas oscilações indesejadas e não explicáveis, contudo, estas
oscilações induzidas são de pequena escala, na ordem e 1% do valor de referência (k=0,475).
É também visível a presença da camada limite.
Na secção de saída, a componente tangencial da velocidade e a quantidade de
movimento angular não são nulos como imposto na condição de projecto, contudo, a sua
variação atinge, valores máximos, entre os 0,06 e 0,085, apenas na região próxima do
invólucro exterior. Estes valores indicam que, nessa região, para que a condição de projecto
seja satisfeita é necessário retirar mais energia ao fluído, aumentando a deflexão do
escoamento, ou seja, aumentando a corda, a flecha, a espessura ou o ângulo de ataque.
Na figura 4.30 e 4.31 são apresentados, nas secções de entrada e de saída,
respectivamente, o coeficiente de pressão total,
2
000
21
ref
ref
VPP
Cρ−
= (4.18)
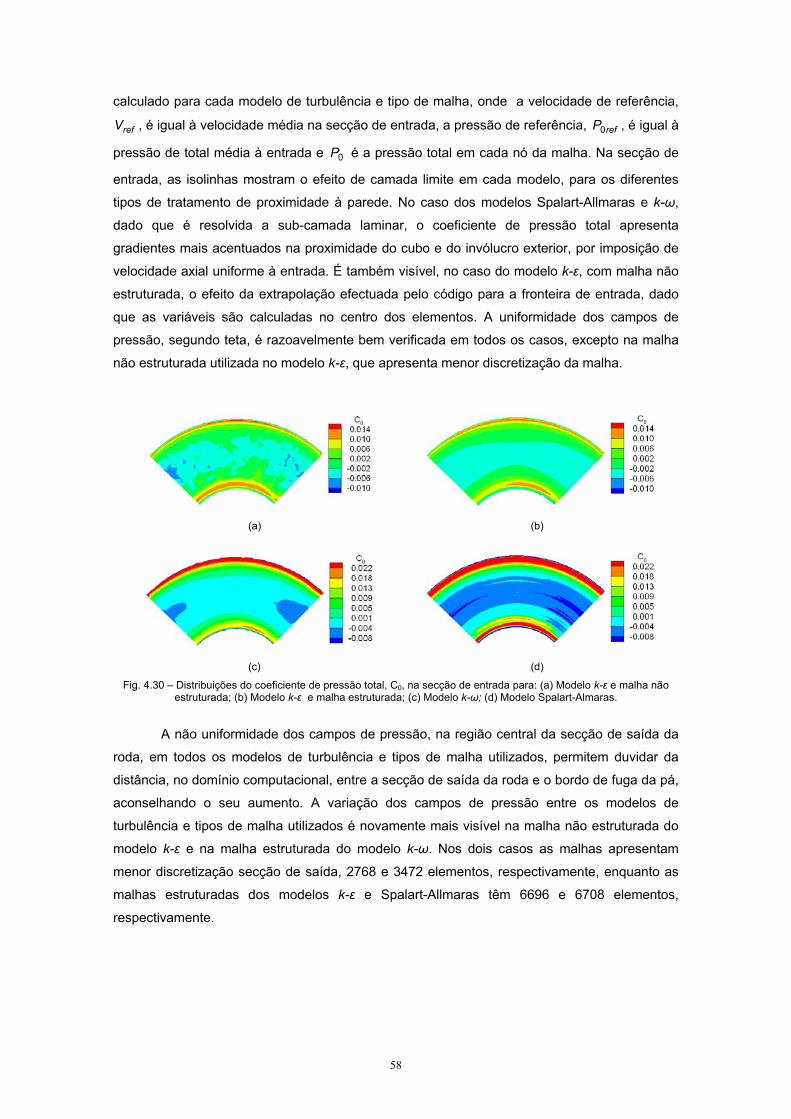
58
calculado para cada modelo de turbulência e tipo de malha, onde a velocidade de referência,
refV , é igual à velocidade média na secção de entrada, a pressão de referência, refP0 , é igual à
pressão de total média à entrada e 0P é a pressão total em cada nó da malha. Na secção de
entrada, as isolinhas mostram o efeito de camada limite em cada modelo, para os diferentes
tipos de tratamento de proximidade à parede. No caso dos modelos Spalart-Allmaras e k-ω,
dado que é resolvida a sub-camada laminar, o coeficiente de pressão total apresenta
gradientes mais acentuados na proximidade do cubo e do invólucro exterior, por imposição de
velocidade axial uniforme à entrada. É também visível, no caso do modelo k-ε, com malha não
estruturada, o efeito da extrapolação efectuada pelo código para a fronteira de entrada, dado
que as variáveis são calculadas no centro dos elementos. A uniformidade dos campos de
pressão, segundo teta, é razoavelmente bem verificada em todos os casos, excepto na malha
não estruturada utilizada no modelo k-ε, que apresenta menor discretização da malha.
(a) (b)
(c) (d)
Fig. 4.30 – Distribuições do coeficiente de pressão total, C0, na secção de entrada para: (a) Modelo k-ε e malha não estruturada; (b) Modelo k-ε e malha estruturada; (c) Modelo k-ω; (d) Modelo Spalart-Almaras.
A não uniformidade dos campos de pressão, na região central da secção de saída da
roda, em todos os modelos de turbulência e tipos de malha utilizados, permitem duvidar da
distância, no domínio computacional, entre a secção de saída da roda e o bordo de fuga da pá,
aconselhando o seu aumento. A variação dos campos de pressão entre os modelos de
turbulência e tipos de malha utilizados é novamente mais visível na malha não estruturada do
modelo k-ε e na malha estruturada do modelo k-ω. Nos dois casos as malhas apresentam
menor discretização secção de saída, 2768 e 3472 elementos, respectivamente, enquanto as
malhas estruturadas dos modelos k-ε e Spalart-Allmaras têm 6696 e 6708 elementos,
respectivamente.
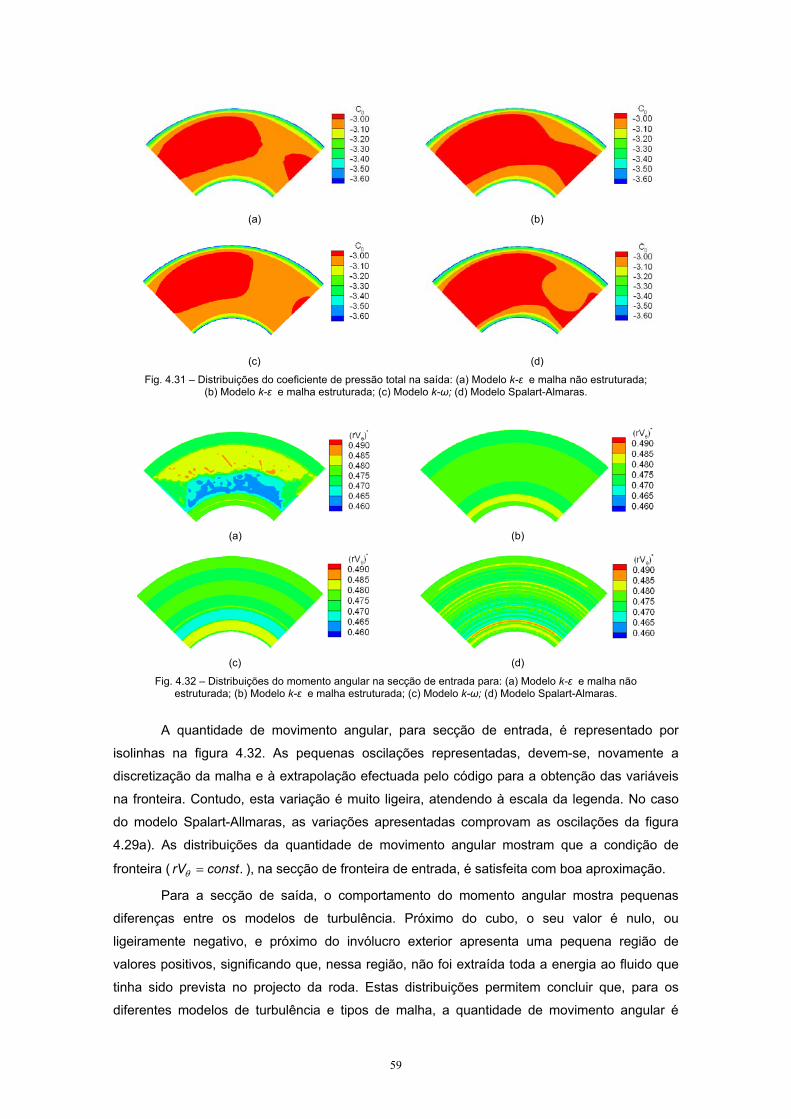
59
(a) (b)
(c) (d)
Fig. 4.31 – Distribuições do coeficiente de pressão total na saída: (a) Modelo k-ε e malha não estruturada; (b) Modelo k-ε e malha estruturada; (c) Modelo k-ω; (d) Modelo Spalart-Almaras.
(a) (b)
(c) (d)
Fig. 4.32 – Distribuições do momento angular na secção de entrada para: (a) Modelo k-ε e malha não estruturada; (b) Modelo k-ε e malha estruturada; (c) Modelo k-ω; (d) Modelo Spalart-Almaras.
A quantidade de movimento angular, para secção de entrada, é representado por
isolinhas na figura 4.32. As pequenas oscilações representadas, devem-se, novamente a
discretização da malha e à extrapolação efectuada pelo código para a obtenção das variáveis
na fronteira. Contudo, esta variação é muito ligeira, atendendo à escala da legenda. No caso
do modelo Spalart-Allmaras, as variações apresentadas comprovam as oscilações da figura
4.29a). As distribuições da quantidade de movimento angular mostram que a condição de
fronteira ( .constrV =θ ), na secção de fronteira de entrada, é satisfeita com boa aproximação.
Para a secção de saída, o comportamento do momento angular mostra pequenas
diferenças entre os modelos de turbulência. Próximo do cubo, o seu valor é nulo, ou
ligeiramente negativo, e próximo do invólucro exterior apresenta uma pequena região de
valores positivos, significando que, nessa região, não foi extraída toda a energia ao fluido que
tinha sido prevista no projecto da roda. Estas distribuições permitem concluir que, para os
diferentes modelos de turbulência e tipos de malha, a quantidade de movimento angular é
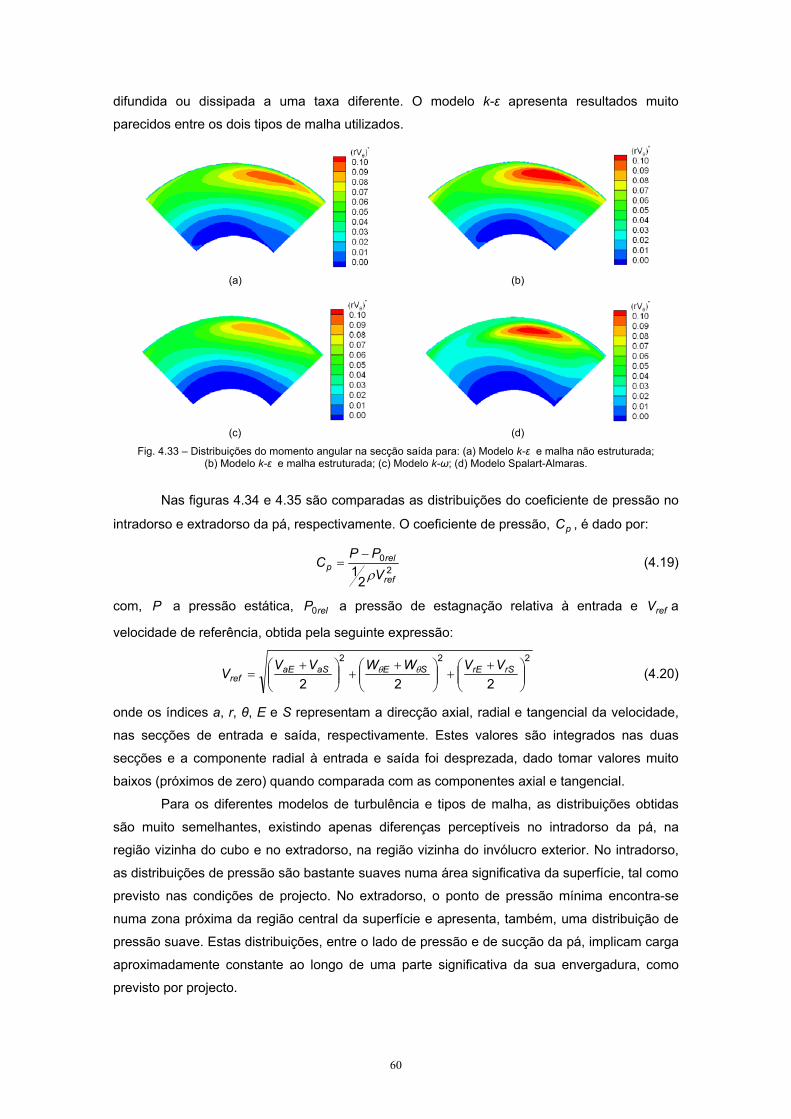
60
difundida ou dissipada a uma taxa diferente. O modelo k-ε apresenta resultados muito
parecidos entre os dois tipos de malha utilizados.
(a) (b)
(c) (d)
Fig. 4.33 – Distribuições do momento angular na secção saída para: (a) Modelo k-ε e malha não estruturada; (b) Modelo k-ε e malha estruturada; (c) Modelo k-ω; (d) Modelo Spalart-Almaras.
Nas figuras 4.34 e 4.35 são comparadas as distribuições do coeficiente de pressão no
intradorso e extradorso da pá, respectivamente. O coeficiente de pressão, pC , é dado por:
20
21
ref
relp
VPP
Cρ
−= (4.19)
com, P a pressão estática, relP0 a pressão de estagnação relativa à entrada e refV a
velocidade de referência, obtida pela seguinte expressão:
222
222 ⎟⎟⎠
⎞⎜⎜⎝
⎛ ++⎟⎟
⎠
⎞⎜⎜⎝
⎛ ++⎟⎟
⎠
⎞⎜⎜⎝
⎛ += rSrESEaSaE
refVVWWVV
V θθ (4.20)
onde os índices a, r, θ, E e S representam a direcção axial, radial e tangencial da velocidade,
nas secções de entrada e saída, respectivamente. Estes valores são integrados nas duas
secções e a componente radial à entrada e saída foi desprezada, dado tomar valores muito
baixos (próximos de zero) quando comparada com as componentes axial e tangencial.
Para os diferentes modelos de turbulência e tipos de malha, as distribuições obtidas
são muito semelhantes, existindo apenas diferenças perceptíveis no intradorso da pá, na
região vizinha do cubo e no extradorso, na região vizinha do invólucro exterior. No intradorso,
as distribuições de pressão são bastante suaves numa área significativa da superfície, tal como
previsto nas condições de projecto. No extradorso, o ponto de pressão mínima encontra-se
numa zona próxima da região central da superfície e apresenta, também, uma distribuição de
pressão suave. Estas distribuições, entre o lado de pressão e de sucção da pá, implicam carga
aproximadamente constante ao longo de uma parte significativa da sua envergadura, como
previsto por projecto.
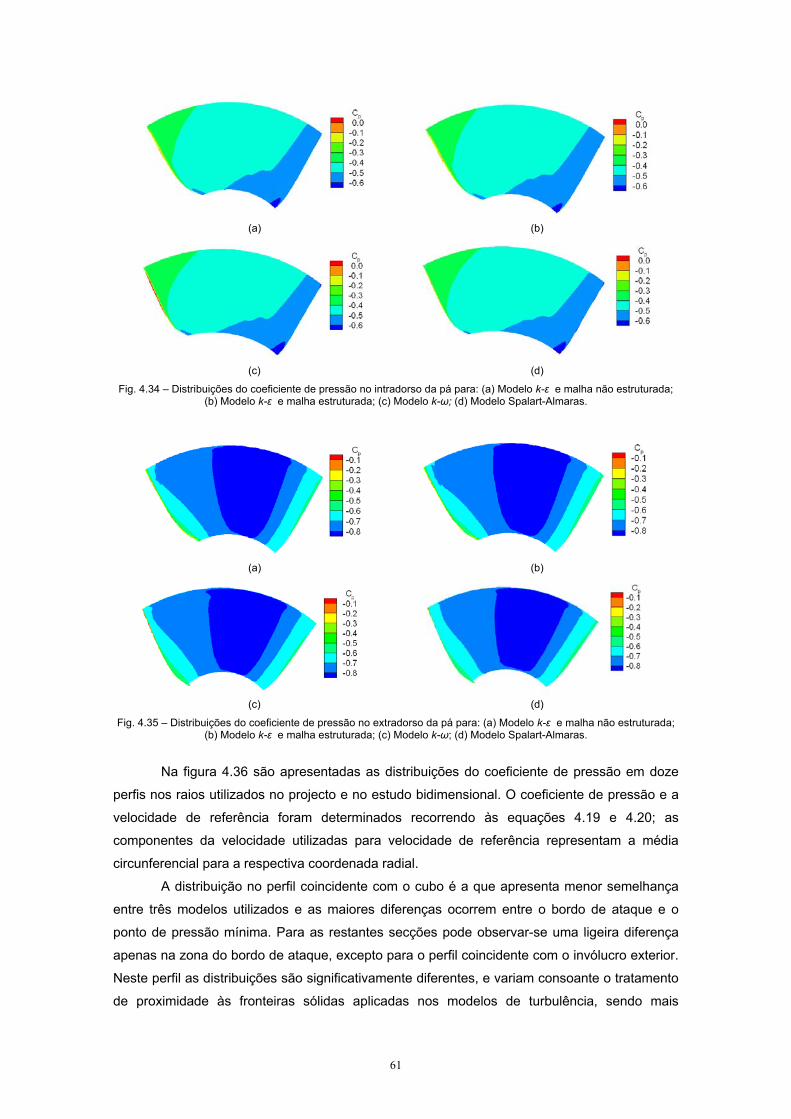
61
(a) (b)
(c) (d)
Fig. 4.34 – Distribuições do coeficiente de pressão no intradorso da pá para: (a) Modelo k-ε e malha não estruturada; (b) Modelo k-ε e malha estruturada; (c) Modelo k-ω; (d) Modelo Spalart-Almaras.
(a) (b)
(c) (d)
Fig. 4.35 – Distribuições do coeficiente de pressão no extradorso da pá para: (a) Modelo k-ε e malha não estruturada; (b) Modelo k-ε e malha estruturada; (c) Modelo k-ω; (d) Modelo Spalart-Almaras.
Na figura 4.36 são apresentadas as distribuições do coeficiente de pressão em doze
perfis nos raios utilizados no projecto e no estudo bidimensional. O coeficiente de pressão e a
velocidade de referência foram determinados recorrendo às equações 4.19 e 4.20; as
componentes da velocidade utilizadas para velocidade de referência representam a média
circunferencial para a respectiva coordenada radial.
A distribuição no perfil coincidente com o cubo é a que apresenta menor semelhança
entre três modelos utilizados e as maiores diferenças ocorrem entre o bordo de ataque e o
ponto de pressão mínima. Para as restantes secções pode observar-se uma ligeira diferença
apenas na zona do bordo de ataque, excepto para o perfil coincidente com o invólucro exterior.
Neste perfil as distribuições são significativamente diferentes, e variam consoante o tratamento
de proximidade às fronteiras sólidas aplicadas nos modelos de turbulência, sendo mais
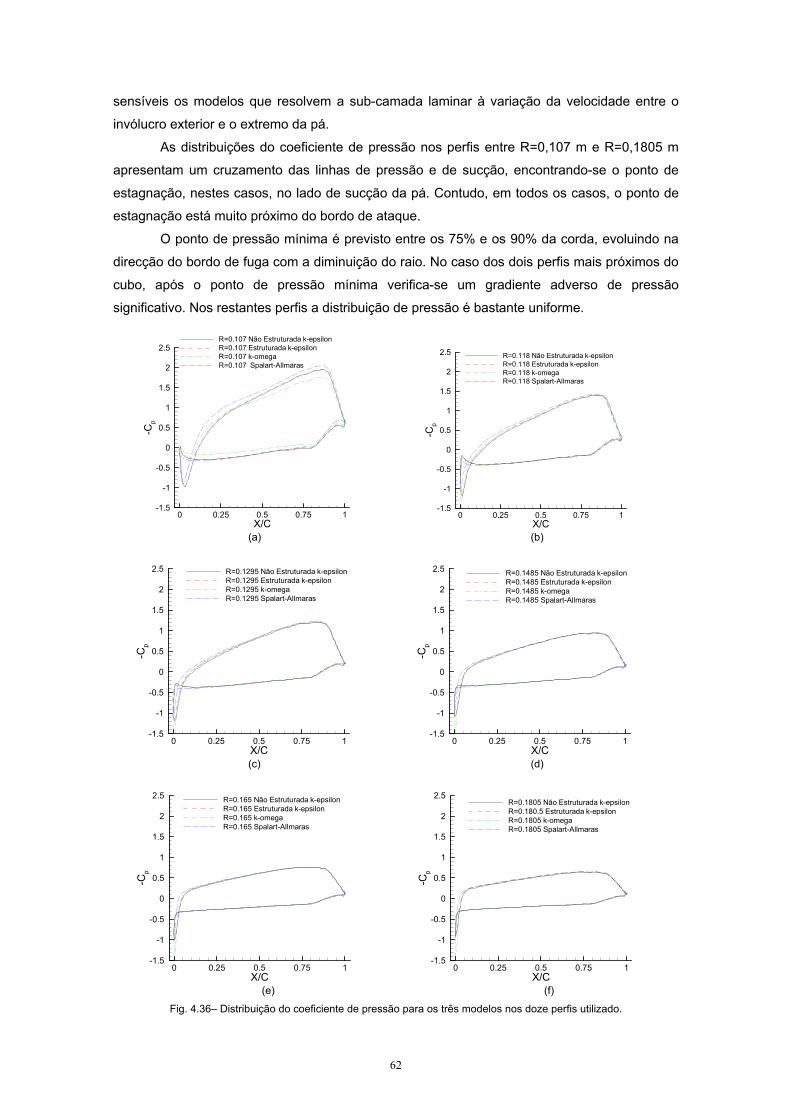
62
sensíveis os modelos que resolvem a sub-camada laminar à variação da velocidade entre o
invólucro exterior e o extremo da pá.
As distribuições do coeficiente de pressão nos perfis entre R=0,107 m e R=0,1805 m
apresentam um cruzamento das linhas de pressão e de sucção, encontrando-se o ponto de
estagnação, nestes casos, no lado de sucção da pá. Contudo, em todos os casos, o ponto de
estagnação está muito próximo do bordo de ataque.
O ponto de pressão mínima é previsto entre os 75% e os 90% da corda, evoluindo na
direcção do bordo de fuga com a diminuição do raio. No caso dos dois perfis mais próximos do
cubo, após o ponto de pressão mínima verifica-se um gradiente adverso de pressão
significativo. Nos restantes perfis a distribuição de pressão é bastante uniforme.
X/C
-Cp
0 0.25 0.5 0.75 1-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5R=0.107 Não Estruturada k-epsilonR=0.107 Estruturada k-epsilonR=0.107 k-omegaR=0.107 Spalart-Allmaras
X/C
-Cp
0 0.25 0.5 0.75 1-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5 R=0.118 Não Estruturada k-epsilonR=0.118 Estruturada k-epsilonR=0.118 k-omegaR=0.118 Spalart-Allmaras
(a) (b)
X/C
-Cp
0 0.25 0.5 0.75 1-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5 R=0.1295 Não Estruturada k-epsilonR=0.1295 Estruturada k-epsilonR=0.1295 k-omegaR=0.1295 Spalart-Allmaras
X/C
-Cp
0 0.25 0.5 0.75 1-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5 R=0.1485 Não Estruturada k-epsilonR=0.1485 Estruturada k-epsilonR=0.1485 k-omegaR=0.1485 Spalart-Allmaras
(c) (d)
X/C
-Cp
0 0.25 0.5 0.75 1-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5 R=0.165 Não Estruturada k-epsilonR=0.165 Estruturada k-epsilonR=0.165 k-omegaR=0.165 Spalart-Allmaras
X/C
-Cp
0 0.25 0.5 0.75 1-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5R=0.1805 Não Estruturada k-epsilonR=0.180.5 Estruturada k-epsilonR=0.1805 k-omegaR=0.1805 Spalart-Allmaras
(e) (f)
Fig. 4.36– Distribuição do coeficiente de pressão para os três modelos nos doze perfis utilizado.
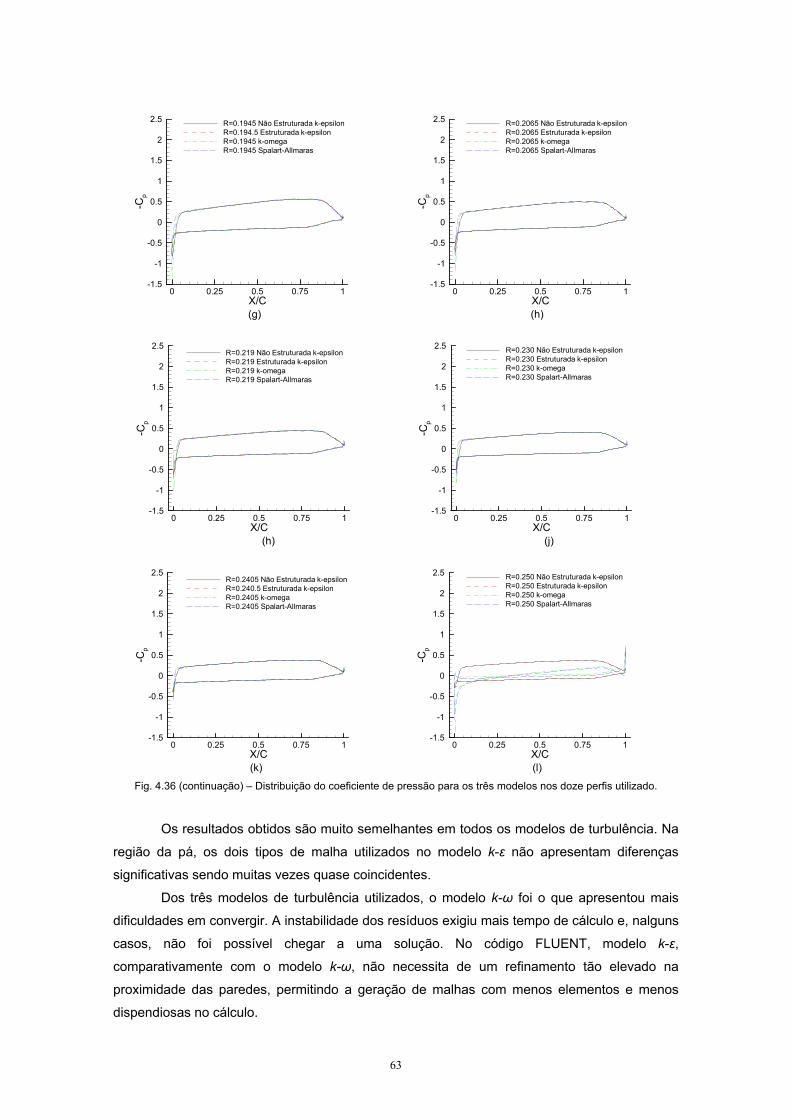
63
X/C
-Cp
0 0.25 0.5 0.75 1-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5 R=0.1945 Não Estruturada k-epsilonR=0.194.5 Estruturada k-epsilonR=0.1945 k-omegaR=0.1945 Spalart-Allmaras
X/C
-Cp
0 0.25 0.5 0.75 1-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5 R=0.2065 Não Estruturada k-epsilonR=0.2065 Estruturada k-epsilonR=0.2065 k-omegaR=0.2065 Spalart-Allmaras
(g) (h)
X/C
-Cp
0 0.25 0.5 0.75 1-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5R=0.219 Não Estruturada k-epsilonR=0.219 Estruturada k-epsilonR=0.219 k-omegaR=0.219 Spalart-Allmaras
X/C
-Cp
0 0.25 0.5 0.75 1-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5 R=0.230 Não Estruturada k-epsilonR=0.230 Estruturada k-epsilonR=0.230 k-omegaR=0.230 Spalart-Allmaras
(h) (j)
X/C
-Cp
0 0.25 0.5 0.75 1-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5R=0.2405 Não Estruturada k-epsilonR=0.240.5 Estruturada k-epsilonR=0.2405 k-omegaR=0.2405 Spalart-Allmaras
X/C
-Cp
0 0.25 0.5 0.75 1-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5 R=0.250 Não Estruturada k-epsilonR=0.250 Estruturada k-epsilonR=0.250 k-omegaR=0.250 Spalart-Allmaras
(k) (l)
Fig. 4.36 (continuação) – Distribuição do coeficiente de pressão para os três modelos nos doze perfis utilizado.
Os resultados obtidos são muito semelhantes em todos os modelos de turbulência. Na
região da pá, os dois tipos de malha utilizados no modelo k-ε não apresentam diferenças
significativas sendo muitas vezes quase coincidentes.
Dos três modelos de turbulência utilizados, o modelo k-ω foi o que apresentou mais
dificuldades em convergir. A instabilidade dos resíduos exigiu mais tempo de cálculo e, nalguns
casos, não foi possível chegar a uma solução. No código FLUENT, modelo k-ε,
comparativamente com o modelo k-ω, não necessita de um refinamento tão elevado na
proximidade das paredes, permitindo a geração de malhas com menos elementos e menos
dispendiosas no cálculo.
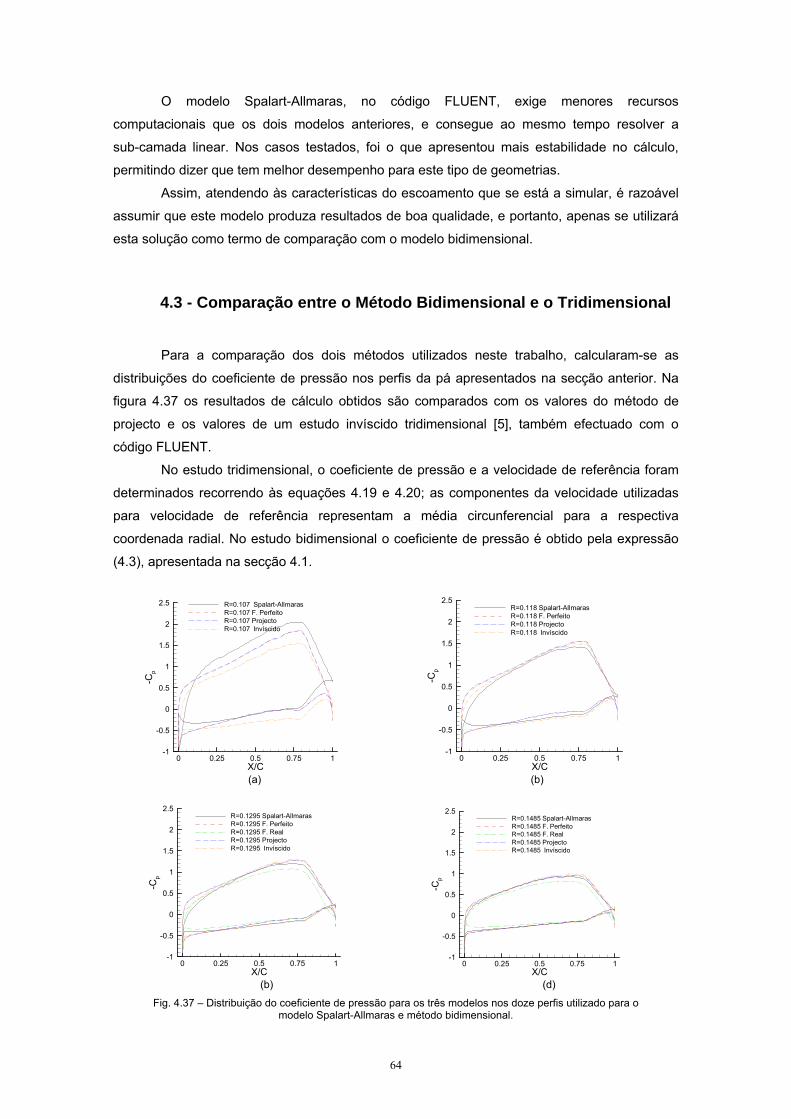
64
O modelo Spalart-Allmaras, no código FLUENT, exige menores recursos
computacionais que os dois modelos anteriores, e consegue ao mesmo tempo resolver a
sub-camada linear. Nos casos testados, foi o que apresentou mais estabilidade no cálculo,
permitindo dizer que tem melhor desempenho para este tipo de geometrias.
Assim, atendendo às características do escoamento que se está a simular, é razoável
assumir que este modelo produza resultados de boa qualidade, e portanto, apenas se utilizará
esta solução como termo de comparação com o modelo bidimensional.
4.3 - Comparação entre o Método Bidimensional e o Tridimensional
Para a comparação dos dois métodos utilizados neste trabalho, calcularam-se as
distribuições do coeficiente de pressão nos perfis da pá apresentados na secção anterior. Na
figura 4.37 os resultados de cálculo obtidos são comparados com os valores do método de
projecto e os valores de um estudo invíscido tridimensional [5], também efectuado com o
código FLUENT.
No estudo tridimensional, o coeficiente de pressão e a velocidade de referência foram
determinados recorrendo às equações 4.19 e 4.20; as componentes da velocidade utilizadas
para velocidade de referência representam a média circunferencial para a respectiva
coordenada radial. No estudo bidimensional o coeficiente de pressão é obtido pela expressão
(4.3), apresentada na secção 4.1.
X/C
-Cp
0 0.25 0.5 0.75 1-1
-0.5
0
0.5
1
1.5
2
2.5 R=0.107 Spalart-AllmarasR=0.107 F. PerfeitoR=0.107 ProjectoR=0.107 Invíscido
X/C
-Cp
0 0.25 0.5 0.75 1-1
-0.5
0
0.5
1
1.5
2
2.5R=0.118 Spalart-AllmarasR=0.118 F. PerfeitoR=0.118 ProjectoR=0.118 Invíscido
(a) (b)
X/C
-Cp
0 0.25 0.5 0.75 1-1
-0.5
0
0.5
1
1.5
2
2.5R=0.1295 Spalart-AllmarasR=0.1295 F. PerfeitoR=0.1295 F. RealR=0.1295 ProjectoR=0.1295 Invíscido
X/C
-Cp
0 0.25 0.5 0.75 1-1
-0.5
0
0.5
1
1.5
2
2.5R=0.1485 Spalart-AllmarasR=0.1485 F. PerfeitoR=0.1485 F. RealR=0.1485 ProjectoR=0.1485 Invíscido
(b) (d)
Fig. 4.37 – Distribuição do coeficiente de pressão para os três modelos nos doze perfis utilizado para o modelo Spalart-Allmaras e método bidimensional.
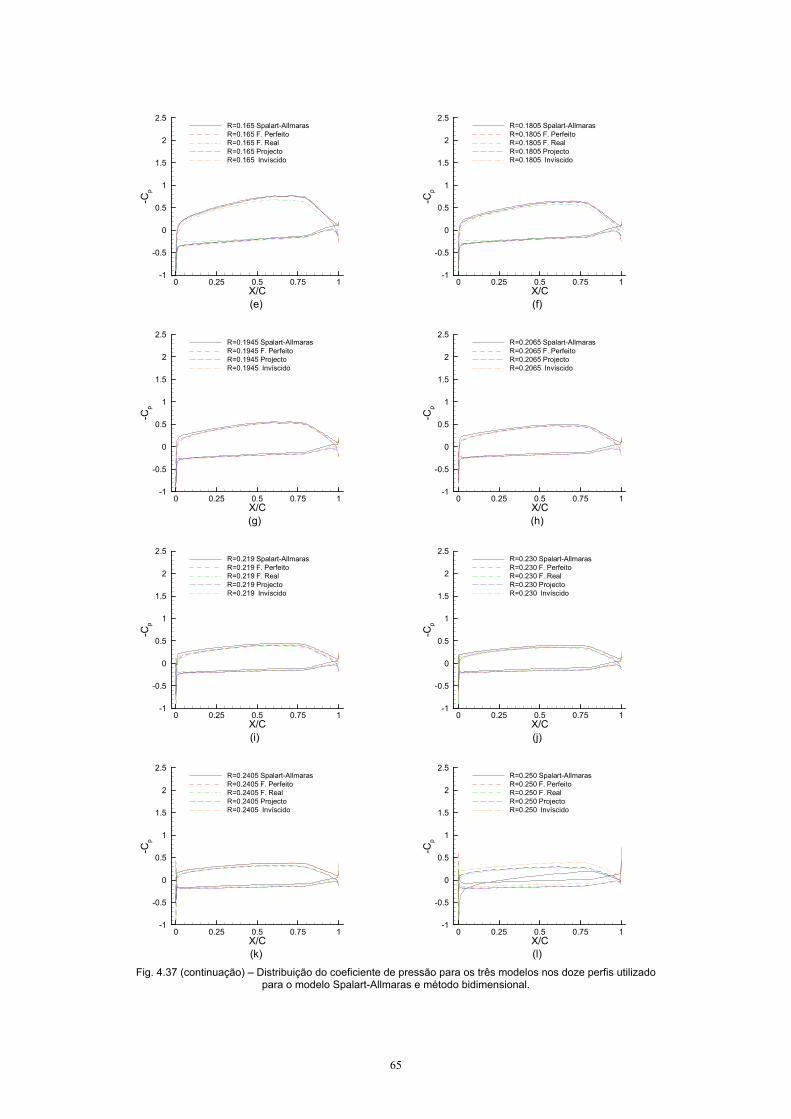
65
X/C
-Cp
0 0.25 0.5 0.75 1-1
-0.5
0
0.5
1
1.5
2
2.5R=0.165 Spalart-AllmarasR=0.165 F. PerfeitoR=0.165 F. RealR=0.165 ProjectoR=0.165 Invíscido
X/C
-Cp
0 0.25 0.5 0.75 1-1
-0.5
0
0.5
1
1.5
2
2.5R=0.1805 Spalart-AllmarasR=0.1805 F. PerfeitoR=0.1805 F. RealR=0.1805 ProjectoR=0.1805 Invíscido
(e) (f)
X/C
-Cp
0 0.25 0.5 0.75 1-1
-0.5
0
0.5
1
1.5
2
2.5R=0.1945 Spalart-AllmarasR=0.1945 F. PerfeitoR=0.1945 ProjectoR=0.1945 Invíscido
X/C
-Cp
0 0.25 0.5 0.75 1-1
-0.5
0
0.5
1
1.5
2
2.5R=0.2065 Spalart-AllmarasR=0.2065 F. PerfeitoR=0.2065 ProjectoR=0.2065 Invíscido
(g) (h)
X/C
-Cp
0 0.25 0.5 0.75 1-1
-0.5
0
0.5
1
1.5
2
2.5R=0.219 Spalart-AllmarasR=0.219 F. PerfeitoR=0.219 F. RealR=0.219 ProjectoR=0.219 Invíscido
X/C
-Cp
0 0.25 0.5 0.75 1-1
-0.5
0
0.5
1
1.5
2
2.5R=0.230 Spalart-AllmarasR=0.230 F. PerfeitoR=0.230 F. RealR=0.230 ProjectoR=0.230 Invíscido
(i) (j)
X/C
-Cp
0 0.25 0.5 0.75 1-1
-0.5
0
0.5
1
1.5
2
2.5R=0.2405 Spalart-AllmarasR=0.2405 F. PerfeitoR=0.2405 F. RealR=0.2405 ProjectoR=0.2405 Invíscido
X/C
-Cp
0 0.25 0.5 0.75 1-1
-0.5
0
0.5
1
1.5
2
2.5R=0.250 Spalart-AllmarasR=0.250 F. PerfeitoR=0.250 F. RealR=0.250 ProjectoR=0.250 Invíscido
(k) (l)
Fig. 4.37 (continuação) – Distribuição do coeficiente de pressão para os três modelos nos doze perfis utilizado para o modelo Spalart-Allmaras e método bidimensional.
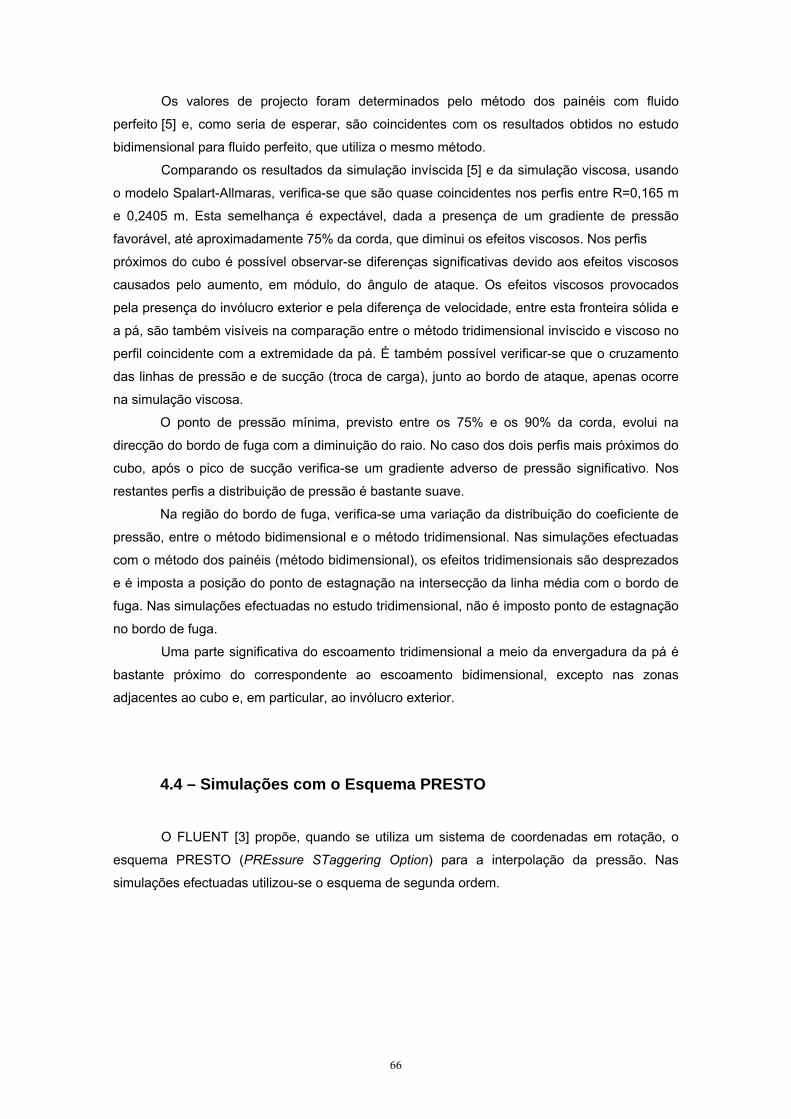
66
Os valores de projecto foram determinados pelo método dos painéis com fluido
perfeito [5] e, como seria de esperar, são coincidentes com os resultados obtidos no estudo
bidimensional para fluido perfeito, que utiliza o mesmo método.
Comparando os resultados da simulação invíscida [5] e da simulação viscosa, usando
o modelo Spalart-Allmaras, verifica-se que são quase coincidentes nos perfis entre R=0,165 m
e 0,2405 m. Esta semelhança é expectável, dada a presença de um gradiente de pressão
favorável, até aproximadamente 75% da corda, que diminui os efeitos viscosos. Nos perfis
próximos do cubo é possível observar-se diferenças significativas devido aos efeitos viscosos
causados pelo aumento, em módulo, do ângulo de ataque. Os efeitos viscosos provocados
pela presença do invólucro exterior e pela diferença de velocidade, entre esta fronteira sólida e
a pá, são também visíveis na comparação entre o método tridimensional invíscido e viscoso no
perfil coincidente com a extremidade da pá. É também possível verificar-se que o cruzamento
das linhas de pressão e de sucção (troca de carga), junto ao bordo de ataque, apenas ocorre
na simulação viscosa.
O ponto de pressão mínima, previsto entre os 75% e os 90% da corda, evolui na
direcção do bordo de fuga com a diminuição do raio. No caso dos dois perfis mais próximos do
cubo, após o pico de sucção verifica-se um gradiente adverso de pressão significativo. Nos
restantes perfis a distribuição de pressão é bastante suave.
Na região do bordo de fuga, verifica-se uma variação da distribuição do coeficiente de
pressão, entre o método bidimensional e o método tridimensional. Nas simulações efectuadas
com o método dos painéis (método bidimensional), os efeitos tridimensionais são desprezados
e é imposta a posição do ponto de estagnação na intersecção da linha média com o bordo de
fuga. Nas simulações efectuadas no estudo tridimensional, não é imposto ponto de estagnação
no bordo de fuga.
Uma parte significativa do escoamento tridimensional a meio da envergadura da pá é
bastante próximo do correspondente ao escoamento bidimensional, excepto nas zonas
adjacentes ao cubo e, em particular, ao invólucro exterior.
4.4 – Simulações com o Esquema PRESTO
O FLUENT [3] propõe, quando se utiliza um sistema de coordenadas em rotação, o
esquema PRESTO (PREssure STaggering Option) para a interpolação da pressão. Nas
simulações efectuadas utilizou-se o esquema de segunda ordem.
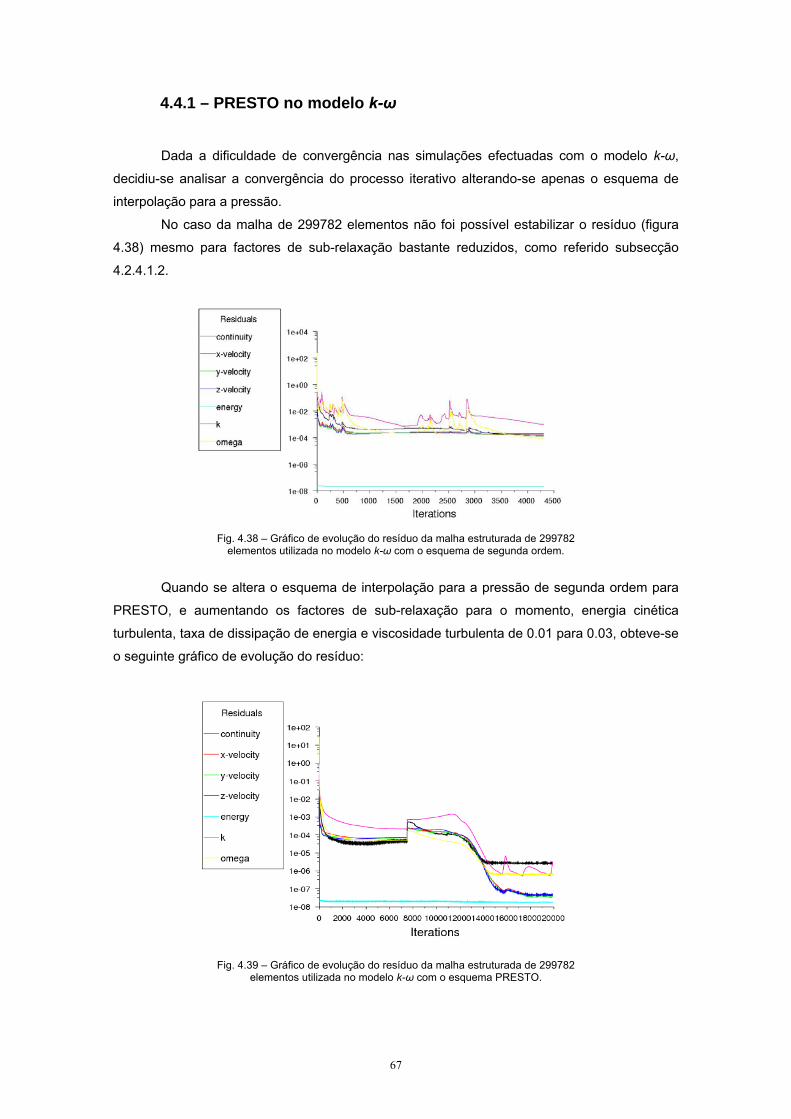
67
4.4.1 – PRESTO no modelo k-ω
Dada a dificuldade de convergência nas simulações efectuadas com o modelo k-ω,
decidiu-se analisar a convergência do processo iterativo alterando-se apenas o esquema de
interpolação para a pressão.
No caso da malha de 299782 elementos não foi possível estabilizar o resíduo (figura
4.38) mesmo para factores de sub-relaxação bastante reduzidos, como referido subsecção
4.2.4.1.2.
Fig. 4.38 – Gráfico de evolução do resíduo da malha estruturada de 299782
elementos utilizada no modelo k-ω com o esquema de segunda ordem.
Quando se altera o esquema de interpolação para a pressão de segunda ordem para
PRESTO, e aumentando os factores de sub-relaxação para o momento, energia cinética
turbulenta, taxa de dissipação de energia e viscosidade turbulenta de 0.01 para 0.03, obteve-se
o seguinte gráfico de evolução do resíduo:
Fig. 4.39 – Gráfico de evolução do resíduo da malha estruturada de 299782
elementos utilizada no modelo k-ω com o esquema PRESTO.
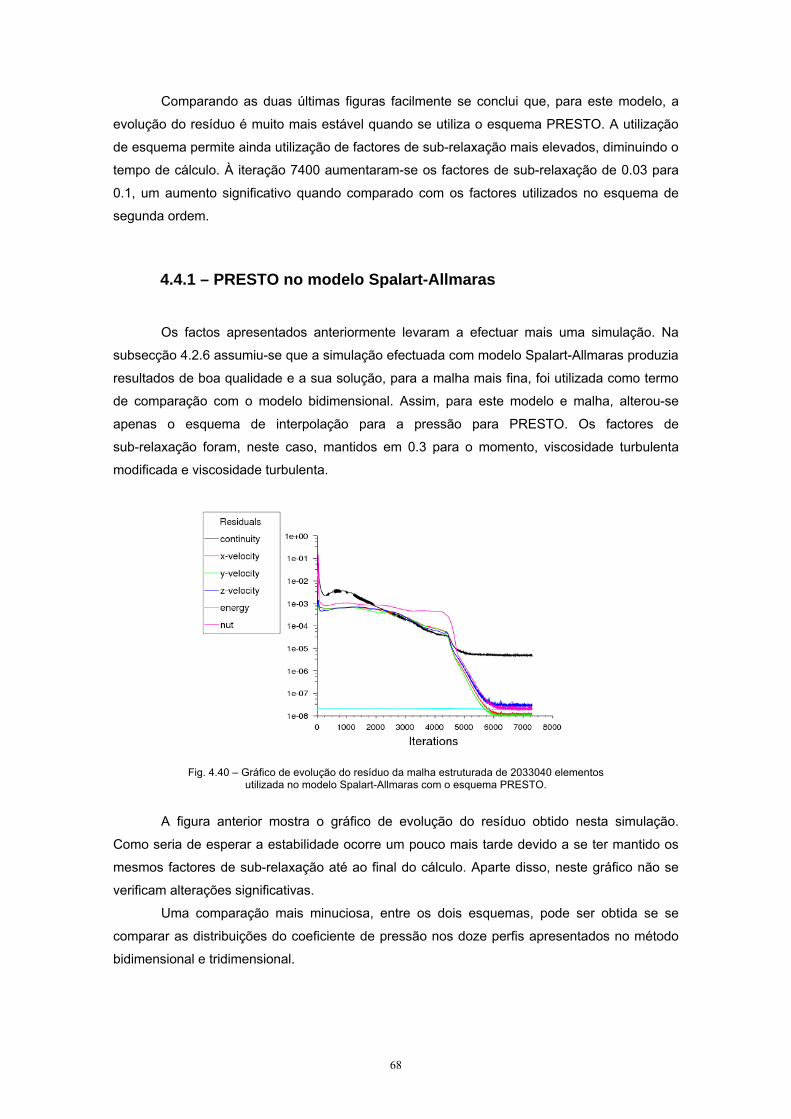
68
Comparando as duas últimas figuras facilmente se conclui que, para este modelo, a
evolução do resíduo é muito mais estável quando se utiliza o esquema PRESTO. A utilização
de esquema permite ainda utilização de factores de sub-relaxação mais elevados, diminuindo o
tempo de cálculo. À iteração 7400 aumentaram-se os factores de sub-relaxação de 0.03 para
0.1, um aumento significativo quando comparado com os factores utilizados no esquema de
segunda ordem.
4.4.1 – PRESTO no modelo Spalart-Allmaras
Os factos apresentados anteriormente levaram a efectuar mais uma simulação. Na
subsecção 4.2.6 assumiu-se que a simulação efectuada com modelo Spalart-Allmaras produzia
resultados de boa qualidade e a sua solução, para a malha mais fina, foi utilizada como termo
de comparação com o modelo bidimensional. Assim, para este modelo e malha, alterou-se
apenas o esquema de interpolação para a pressão para PRESTO. Os factores de
sub-relaxação foram, neste caso, mantidos em 0.3 para o momento, viscosidade turbulenta
modificada e viscosidade turbulenta.
Fig. 4.40 – Gráfico de evolução do resíduo da malha estruturada de 2033040 elementos
utilizada no modelo Spalart-Allmaras com o esquema PRESTO.
A figura anterior mostra o gráfico de evolução do resíduo obtido nesta simulação.
Como seria de esperar a estabilidade ocorre um pouco mais tarde devido a se ter mantido os
mesmos factores de sub-relaxação até ao final do cálculo. Aparte disso, neste gráfico não se
verificam alterações significativas.
Uma comparação mais minuciosa, entre os dois esquemas, pode ser obtida se se
comparar as distribuições do coeficiente de pressão nos doze perfis apresentados no método
bidimensional e tridimensional.
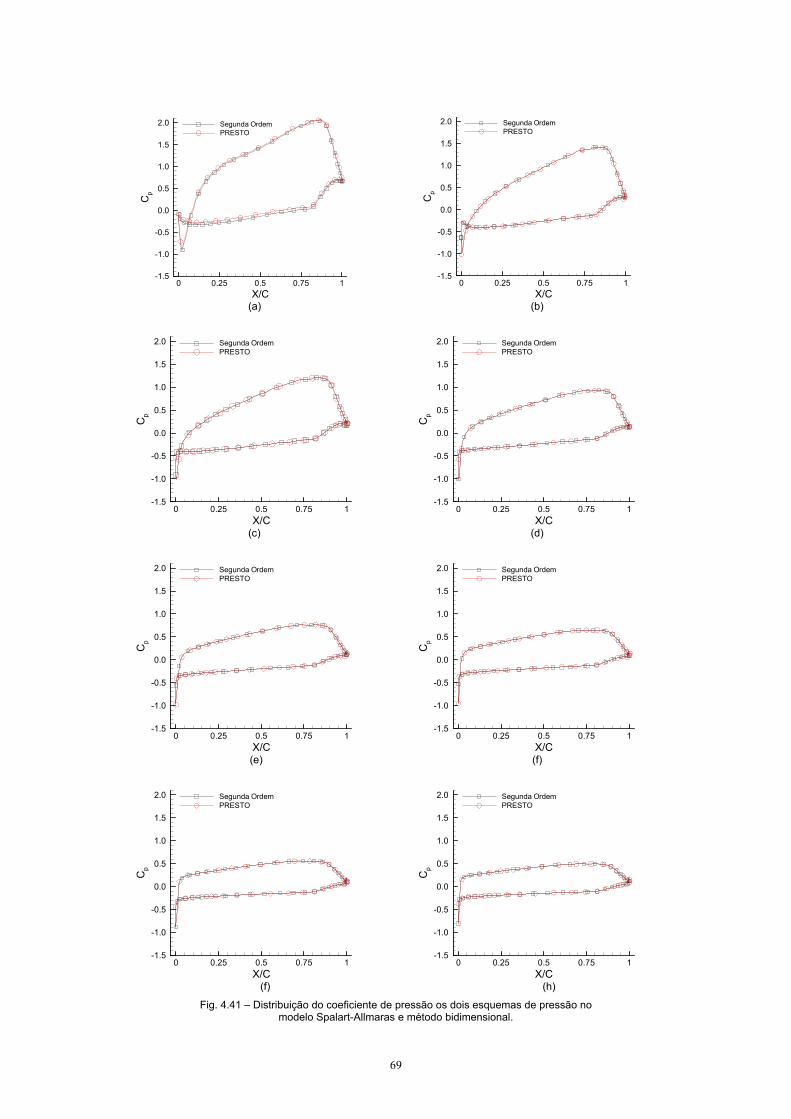
69
X/C
Cp
0 0.25 0.5 0.75 1-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0 Segunda OrdemPRESTO
X/C
Cp
0 0.25 0.5 0.75 1-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0 Segunda OrdemPRESTO
(a) (b)
X/C
Cp
0 0.25 0.5 0.75 1-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0 Segunda OrdemPRESTO
X/C
Cp
0 0.25 0.5 0.75 1-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0 Segunda OrdemPRESTO
(c) (d)
X/C
Cp
0 0.25 0.5 0.75 1-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0 Segunda OrdemPRESTO
X/C
Cp
0 0.25 0.5 0.75 1-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0 Segunda OrdemPRESTO
(e) (f)
X/C
Cp
0 0.25 0.5 0.75 1-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0 Segunda OrdemPRESTO
X/C
Cp
0 0.25 0.5 0.75 1-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0 Segunda OrdemPRESTO
(f) (h)
Fig. 4.41 – Distribuição do coeficiente de pressão os dois esquemas de pressão no modelo Spalart-Allmaras e método bidimensional.
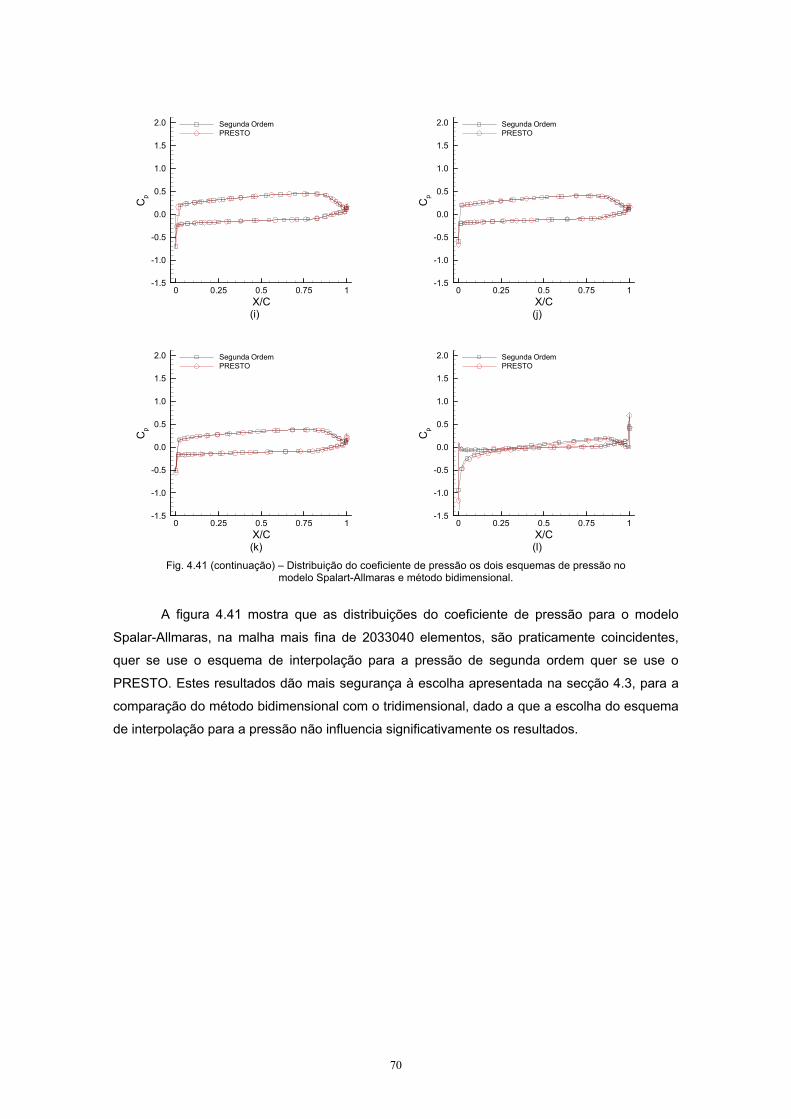
70
X/C
Cp
0 0.25 0.5 0.75 1-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0 Segunda OrdemPRESTO
X/C
Cp
0 0.25 0.5 0.75 1-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0 Segunda OrdemPRESTO
(i) (j)
X/C
Cp
0 0.25 0.5 0.75 1-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0 Segunda OrdemPRESTO
X/C
Cp
0 0.25 0.5 0.75 1-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0 Segunda OrdemPRESTO
(k) (l)
Fig. 4.41 (continuação) – Distribuição do coeficiente de pressão os dois esquemas de pressão no modelo Spalart-Allmaras e método bidimensional.
A figura 4.41 mostra que as distribuições do coeficiente de pressão para o modelo
Spalar-Allmaras, na malha mais fina de 2033040 elementos, são praticamente coincidentes,
quer se use o esquema de interpolação para a pressão de segunda ordem quer se use o
PRESTO. Estes resultados dão mais segurança à escolha apresentada na secção 4.3, para a
comparação do método bidimensional com o tridimensional, dado a que a escolha do esquema
de interpolação para a pressão não influencia significativamente os resultados.
71
5 - Conclusões
O escoamento viscoso tridimensional através das pás da roda de uma turbina
hidráulica, com velocidade de rotação de 2500 r.p.m, foi calculado recorrendo ao código
FLUENT. O escoamento bidimensional foi calculado pelo método dos painéis em cascata com
interacção fraca viscosa de camada limite.
Dos três modelos de turbulência utilizados no estudo tridimensional, com o código
FLUENT, o modelo k-ω, foi o que apresentou maiores dificuldades em convergir, para as
malhas utilizadas. A instabilidade dos resíduos exigiu mais tempo de cálculo. Nalguns casos,
não foi possível chegar a uma solução com este modelo.
No código FLUENT, a utilização modelo k-ε, comparativamente com o modelo k-ω, não
necessita de um refinamento de malha tão elevado na proximidade das paredes, permitindo a
adopção de malhas com menos elementos, o que origina menores tempos de cálculo.
O modelo Spalart-Almaras, exige menores recursos computacionais que os dois
modelos anteriores e consegue, ao mesmo tempo, resolver a sub-camada linear. Nos casos
testados, com o código FLUENT, foi o que apresentou mais estabilidade no cálculo, permitindo
dizer que tem melhor desempenho para este tipo de trabalhos.
A simulação invíscida, apresentada em [5], e a simulação viscosa, utilizando o código
FLUENT, não apresentam diferenças significativas, excepto nos perfis coincidentes com o
invólucro exterior e com o cubo.
Os valores de projecto foram determinados pelo método de painel com fluido
perfeito [5] e, como seria de esperar, são coincidentes com os resultados obtidos no estudo
bidimensional para fluido perfeito, que utiliza o mesmo método.
Para uma parte significativa do escoamento afastado das paredes da caixa e do cubo,
o método tridimensional apresenta resultados próximos dos obtidos com o método
bidimensional, o que permite a utilização desta última numa primeira fase de projecto de rodas
deste tipo de turbinas com as inerentes vantagens em termos de exigência computacional.
A utilização do esquema de interpolação para a pressão PRESTO estabiliza o cálculo
iterativo nas simulações com o modelo k-ω, contudo, com o modelo Spalart-Allmaras a
estabilidade aumenta apenas ligeiramente e não apresenta diferenças significativas nos
resultados.
72
Referências Bibliográficas
[1] L.M.C. Ferro, Estudo Numérico e Experimental do Escoamento numa Turbina
Hidráulica Axial, Tese de Douturamento, Instituto Superior Técnico, Lisboa
[2] L.R.C. Eça and J.A.C. Falcão de Campos, Analysis of Two-Dimensional Foils Using a
Viscous-Inviscid Interaction Method, Int. Shipbuild. Progr., 40, no. 422, pp. 137-163,
1993.
[3] FLUENT 6.2 User's Guide, Fluent Incorporated, 2005.
[4] GAMBIT 2.2 Modelling Guide, Fluent Incorporated, 2004.
[5] L.M.C. Ferro, A.F. Tiago, L.M.C. Gato e J.M. Paixão Conde, Cálculo do Escoamento
Invíscido na Roda de uma Turbina Axial, 8º Congresso Iberoamericano de Engenharia
Mecânica, Cusco, 2007.
[6] I. H. Abbot & A. E. Doenhoff, Theory of Wing Sections. Dover Publications, 1959.
[7] V. Brederode, Fundamentos de Aerodinâmica Incompressível, Edição do Autor, 1997.
[8] J. Moran, Theoretical and Computational Aerodynamics, John Wiley & Sons, 1983.
[9] J. Hess, Panel Methods in Computational Fluid Dynamics, Annual Review of Fluid
Mechanics, 22, 255–274, 1990.
[10] J.H. Ferziger and M.Peric, Computational Methods for Fluid Dynamics, Springer, 1997.
[11] M.J. Taylor, Brochure B1E1-1484D, Interim Report - Evaluation of Single-Row
Compressor Test Cases Using the HYDRA CFD Solver. Tech. rept. TSG 0919,
Aerothermal Methods Group Report, 28 pgs, 2001.
[12] P. Spalart and S. Allmaras. A one-equation turbulence model for aerodynamic flows,
Technical Report AIAA-92-0439, American Institute of Aeronautics and Astronautics,
1992.
[13] J.C. Páscoa, J.K. Luff, J.J. McGuirk & A.C. Mendes, On Accurate Numerical Modeling
of 3D Turbulent Flow Through a DCA Compressor Cascade and its Experimental
Validation. International Journal of Dynamics of Fluids, 2(1), 1–18, 2006.
[14] J.L. Hess and A.M.O. Smith, Calculation of Potential Flow about Arbitrary Bodies
Progress in Aeronautical Sciences, vol. 18, 1967.
[15] J.D. Denton, Through-flow Calculation for Transonic Axial Flow Turbines, ASME
Journal of Eng. for Power, vol. 97, pp. 549-560, 1978.
[16] T. Brockett, Minimum Pressure Envelopes for Modified NACA-66 Sections with NACA
a=0.8 Camber and Buships Type I and II Sections, David Taylor Model Basin
Washington DC Hydromechanics Lab. Rept. 1780, Washington, Feb. 1966.
[17] J. Raabe, HydroPower, VDI-Verlag, Düsseldorf, 1985.
[18] B. Lakshminarayana, Fluid Dynamics and Heat Transfer of Turbomachinery, John Wiley
& Sons, Inc, 1996.
73
[19] J.C.C. Henriques, Análise e Optimização de Perfis Alares e Cascatas de Pás,
Departamento de Engenharia Mecânica, Instituto Superior Técnico, Universidade
Técnica de Lisboa, 1993.
[20] L.R.C. Eça, Cálculo do Escoamento Viscoso em Torno de Perfis Alares, Departamento
de Engenharia Mecânica, Instituto Superior Técnico, Universidade Técnica de Lisboa,
1987.
[21] B.E. Launder and D.B. Spalding, Lectures in mathematical models of turbulence,
Academic Press, (1972).
[22] D.C. Wilcox, Turbulence Modeling for CFD, second edition, DCW industries.
[23] H.K. Versteeg; W. Malalasekera “An introduction to computacional Fluid Dynamics”,
1995.
[24] J.P. Vandoormaal and G.D. Raithby. Enhancements of the SIMPLE method for
predicting incompressible fluid flows, Numer. Heat Transfer Vol. 7, pp. 147 - 163,
(1984).
[25] B.P. Leonard and S. Mokhtari. ULTRA-SHARP Nonoscillatory Convection Schemes for
High-Speed Steady Multidimensional Flow. NASA TM 1-2568 (ICOMP-90-12), NASA
Lewis Research Center, 1990
[26] P.J. Roache, Verification and Validation in Computational Science and Engineering,
Hermosa Publishers, (1998).
[27] L. Eça, Verificação de Códigos e de Cálculos em Mecânica dos Fluidos Computacional.
I Conferência Nacional em Mecânica dos Fluidos e Termodinâmica, FCT-UNL,
Portugal, 2006.
[28] L. Eça, J.M. Paixão Conde e E. Didier, Verificação de Três Códigos Numéricos no
Cálculo do Escoamento Permanente e Incompressível numa Cavidade,
CMNE/CILANCE 2007, Porto.
[29] J.M. Paixão Conde, Verificação e Validação de um Código Numérico na Simulação de
Escoamentos Turbulentos, CMNE/CILANCE Porto, 2007.
[30] L. Eça and M. Hoekstra, Discretization Uncertainty Estimation based on a Least
Squares version of the Grid Convergence Index, Proceedings of the 2nd Workshop on
CFD Uncertainty Analysis, Instituto Superior Técnico, Lisboa, 2006.
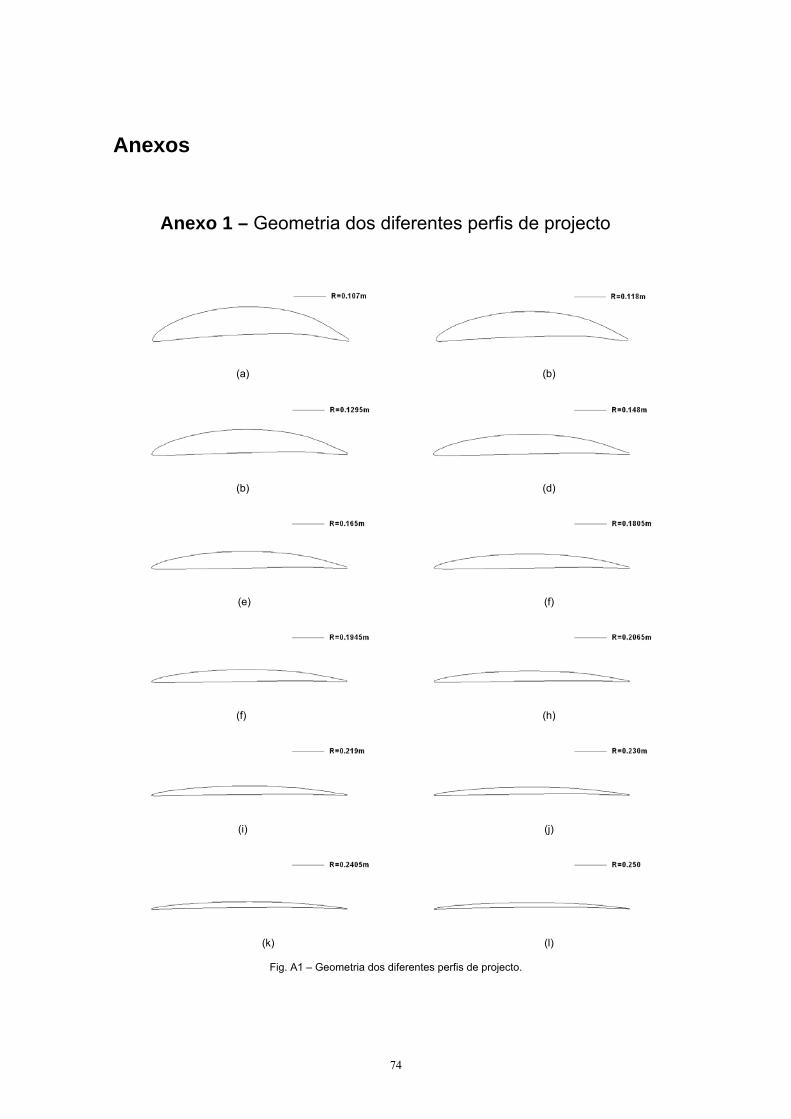
74
Anexos
Anexo 1 – Geometria dos diferentes perfis de projecto
(a) (b)
(b) (d)
(e) (f)
(f) (h)
(i) (j)
(k) (l)
Fig. A1 – Geometria dos diferentes perfis de projecto.
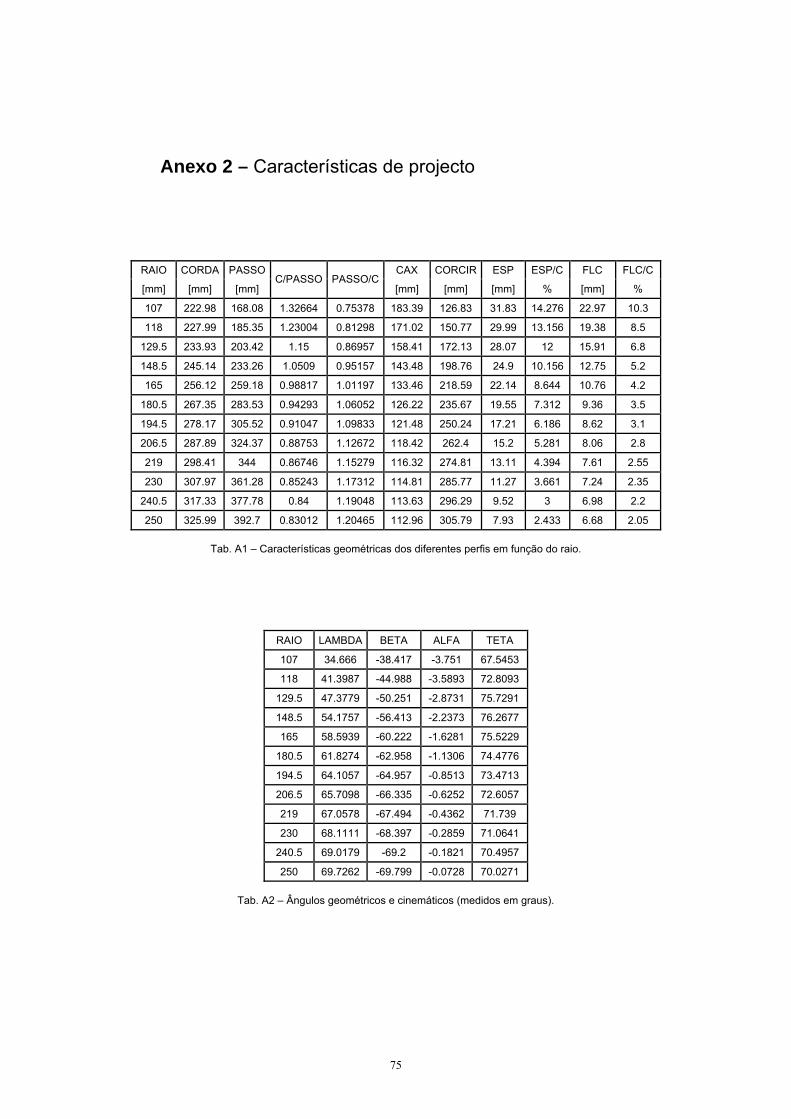
75
Anexo 2 – Características de projecto
RAIO CORDA PASSO CAX CORCIR ESP ESP/C FLC FLC/C
[mm] [mm] [mm] C/PASSO PASSO/C
[mm] [mm] [mm] % [mm] %
107 222.98 168.08 1.32664 0.75378 183.39 126.83 31.83 14.276 22.97 10.3
118 227.99 185.35 1.23004 0.81298 171.02 150.77 29.99 13.156 19.38 8.5
129.5 233.93 203.42 1.15 0.86957 158.41 172.13 28.07 12 15.91 6.8
148.5 245.14 233.26 1.0509 0.95157 143.48 198.76 24.9 10.156 12.75 5.2
165 256.12 259.18 0.98817 1.01197 133.46 218.59 22.14 8.644 10.76 4.2
180.5 267.35 283.53 0.94293 1.06052 126.22 235.67 19.55 7.312 9.36 3.5
194.5 278.17 305.52 0.91047 1.09833 121.48 250.24 17.21 6.186 8.62 3.1
206.5 287.89 324.37 0.88753 1.12672 118.42 262.4 15.2 5.281 8.06 2.8
219 298.41 344 0.86746 1.15279 116.32 274.81 13.11 4.394 7.61 2.55
230 307.97 361.28 0.85243 1.17312 114.81 285.77 11.27 3.661 7.24 2.35
240.5 317.33 377.78 0.84 1.19048 113.63 296.29 9.52 3 6.98 2.2
250 325.99 392.7 0.83012 1.20465 112.96 305.79 7.93 2.433 6.68 2.05
Tab. A1 – Características geométricas dos diferentes perfis em função do raio.
RAIO LAMBDA BETA ALFA TETA
107 34.666 -38.417 -3.751 67.5453
118 41.3987 -44.988 -3.5893 72.8093
129.5 47.3779 -50.251 -2.8731 75.7291
148.5 54.1757 -56.413 -2.2373 76.2677
165 58.5939 -60.222 -1.6281 75.5229
180.5 61.8274 -62.958 -1.1306 74.4776
194.5 64.1057 -64.957 -0.8513 73.4713
206.5 65.7098 -66.335 -0.6252 72.6057
219 67.0578 -67.494 -0.4362 71.739
230 68.1111 -68.397 -0.2859 71.0641
240.5 69.0179 -69.2 -0.1821 70.4957
250 69.7262 -69.799 -0.0728 70.0271
Tab. A2 – Ângulos geométricos e cinemáticos (medidos em graus).
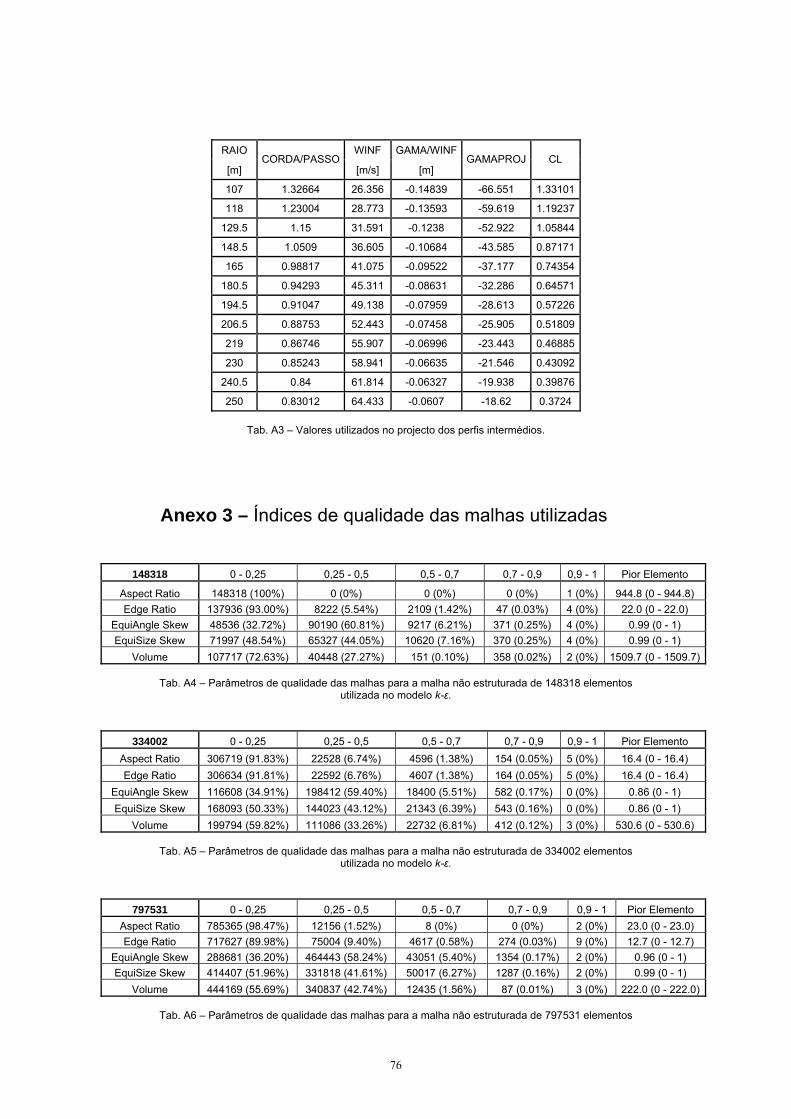
76
RAIO WINF GAMA/WINF
[m] CORDA/PASSO
[m/s] [m] GAMAPROJ CL
107 1.32664 26.356 -0.14839 -66.551 1.33101
118 1.23004 28.773 -0.13593 -59.619 1.19237
129.5 1.15 31.591 -0.1238 -52.922 1.05844
148.5 1.0509 36.605 -0.10684 -43.585 0.87171
165 0.98817 41.075 -0.09522 -37.177 0.74354
180.5 0.94293 45.311 -0.08631 -32.286 0.64571
194.5 0.91047 49.138 -0.07959 -28.613 0.57226
206.5 0.88753 52.443 -0.07458 -25.905 0.51809
219 0.86746 55.907 -0.06996 -23.443 0.46885
230 0.85243 58.941 -0.06635 -21.546 0.43092
240.5 0.84 61.814 -0.06327 -19.938 0.39876
250 0.83012 64.433 -0.0607 -18.62 0.3724
Tab. A3 – Valores utilizados no projecto dos perfis intermédios.
Anexo 3 – Índices de qualidade das malhas utilizadas
148318 0 - 0,25 0,25 - 0,5 0,5 - 0,7 0,7 - 0,9 0,9 - 1 Pior Elemento
Aspect Ratio 148318 (100%) 0 (0%) 0 (0%) 0 (0%) 1 (0%) 944.8 (0 - 944.8) Edge Ratio 137936 (93.00%) 8222 (5.54%) 2109 (1.42%) 47 (0.03%) 4 (0%) 22.0 (0 - 22.0)
EquiAngle Skew 48536 (32.72%) 90190 (60.81%) 9217 (6.21%) 371 (0.25%) 4 (0%) 0.99 (0 - 1) EquiSize Skew 71997 (48.54%) 65327 (44.05%) 10620 (7.16%) 370 (0.25%) 4 (0%) 0.99 (0 - 1)
Volume 107717 (72.63%) 40448 (27.27%) 151 (0.10%) 358 (0.02%) 2 (0%) 1509.7 (0 - 1509.7)
Tab. A4 – Parâmetros de qualidade das malhas para a malha não estruturada de 148318 elementos utilizada no modelo k-ε.
334002 0 - 0,25 0,25 - 0,5 0,5 - 0,7 0,7 - 0,9 0,9 - 1 Pior Elemento Aspect Ratio 306719 (91.83%) 22528 (6.74%) 4596 (1.38%) 154 (0.05%) 5 (0%) 16.4 (0 - 16.4) Edge Ratio 306634 (91.81%) 22592 (6.76%) 4607 (1.38%) 164 (0.05%) 5 (0%) 16.4 (0 - 16.4)
EquiAngle Skew 116608 (34.91%) 198412 (59.40%) 18400 (5.51%) 582 (0.17%) 0 (0%) 0.86 (0 - 1) EquiSize Skew 168093 (50.33%) 144023 (43.12%) 21343 (6.39%) 543 (0.16%) 0 (0%) 0.86 (0 - 1)
Volume 199794 (59.82%) 111086 (33.26%) 22732 (6.81%) 412 (0.12%) 3 (0%) 530.6 (0 - 530.6)
Tab. A5 – Parâmetros de qualidade das malhas para a malha não estruturada de 334002 elementos utilizada no modelo k-ε.
797531 0 - 0,25 0,25 - 0,5 0,5 - 0,7 0,7 - 0,9 0,9 - 1 Pior Elemento Aspect Ratio 785365 (98.47%) 12156 (1.52%) 8 (0%) 0 (0%) 2 (0%) 23.0 (0 - 23.0) Edge Ratio 717627 (89.98%) 75004 (9.40%) 4617 (0.58%) 274 (0.03%) 9 (0%) 12.7 (0 - 12.7)
EquiAngle Skew 288681 (36.20%) 464443 (58.24%) 43051 (5.40%) 1354 (0.17%) 2 (0%) 0.96 (0 - 1) EquiSize Skew 414407 (51.96%) 331818 (41.61%) 50017 (6.27%) 1287 (0.16%) 2 (0%) 0.99 (0 - 1)
Volume 444169 (55.69%) 340837 (42.74%) 12435 (1.56%) 87 (0.01%) 3 (0%) 222.0 (0 - 222.0)
Tab. A6 – Parâmetros de qualidade das malhas para a malha não estruturada de 797531 elementos
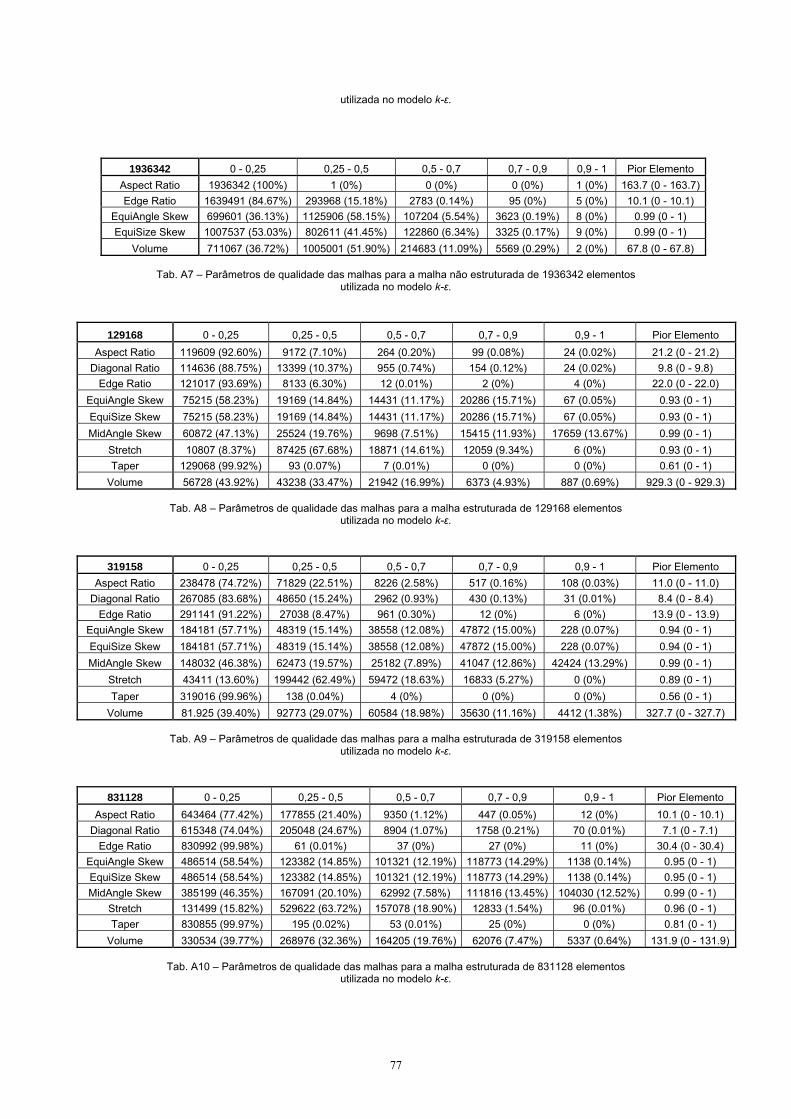
77
utilizada no modelo k-ε.
1936342 0 - 0,25 0,25 - 0,5 0,5 - 0,7 0,7 - 0,9 0,9 - 1 Pior Elemento Aspect Ratio 1936342 (100%) 1 (0%) 0 (0%) 0 (0%) 1 (0%) 163.7 (0 - 163.7)Edge Ratio 1639491 (84.67%) 293968 (15.18%) 2783 (0.14%) 95 (0%) 5 (0%) 10.1 (0 - 10.1)
EquiAngle Skew 699601 (36.13%) 1125906 (58.15%) 107204 (5.54%) 3623 (0.19%) 8 (0%) 0.99 (0 - 1) EquiSize Skew 1007537 (53.03%) 802611 (41.45%) 122860 (6.34%) 3325 (0.17%) 9 (0%) 0.99 (0 - 1)
Volume 711067 (36.72%) 1005001 (51.90%) 214683 (11.09%) 5569 (0.29%) 2 (0%) 67.8 (0 - 67.8)
Tab. A7 – Parâmetros de qualidade das malhas para a malha não estruturada de 1936342 elementos utilizada no modelo k-ε.
129168 0 - 0,25 0,25 - 0,5 0,5 - 0,7 0,7 - 0,9 0,9 - 1 Pior Elemento Aspect Ratio 119609 (92.60%) 9172 (7.10%) 264 (0.20%) 99 (0.08%) 24 (0.02%) 21.2 (0 - 21.2)
Diagonal Ratio 114636 (88.75%) 13399 (10.37%) 955 (0.74%) 154 (0.12%) 24 (0.02%) 9.8 (0 - 9.8) Edge Ratio 121017 (93.69%) 8133 (6.30%) 12 (0.01%) 2 (0%) 4 (0%) 22.0 (0 - 22.0)
EquiAngle Skew 75215 (58.23%) 19169 (14.84%) 14431 (11.17%) 20286 (15.71%) 67 (0.05%) 0.93 (0 - 1) EquiSize Skew 75215 (58.23%) 19169 (14.84%) 14431 (11.17%) 20286 (15.71%) 67 (0.05%) 0.93 (0 - 1) MidAngle Skew 60872 (47.13%) 25524 (19.76%) 9698 (7.51%) 15415 (11.93%) 17659 (13.67%) 0.99 (0 - 1)
Stretch 10807 (8.37%) 87425 (67.68%) 18871 (14.61%) 12059 (9.34%) 6 (0%) 0.93 (0 - 1) Taper 129068 (99.92%) 93 (0.07%) 7 (0.01%) 0 (0%) 0 (0%) 0.61 (0 - 1)
Volume 56728 (43.92%) 43238 (33.47%) 21942 (16.99%) 6373 (4.93%) 887 (0.69%) 929.3 (0 - 929.3)
Tab. A8 – Parâmetros de qualidade das malhas para a malha estruturada de 129168 elementos utilizada no modelo k-ε.
319158 0 - 0,25 0,25 - 0,5 0,5 - 0,7 0,7 - 0,9 0,9 - 1 Pior Elemento Aspect Ratio 238478 (74.72%) 71829 (22.51%) 8226 (2.58%) 517 (0.16%) 108 (0.03%) 11.0 (0 - 11.0)
Diagonal Ratio 267085 (83.68%) 48650 (15.24%) 2962 (0.93%) 430 (0.13%) 31 (0.01%) 8.4 (0 - 8.4) Edge Ratio 291141 (91.22%) 27038 (8.47%) 961 (0.30%) 12 (0%) 6 (0%) 13.9 (0 - 13.9)
EquiAngle Skew 184181 (57.71%) 48319 (15.14%) 38558 (12.08%) 47872 (15.00%) 228 (0.07%) 0.94 (0 - 1) EquiSize Skew 184181 (57.71%) 48319 (15.14%) 38558 (12.08%) 47872 (15.00%) 228 (0.07%) 0.94 (0 - 1) MidAngle Skew 148032 (46.38%) 62473 (19.57%) 25182 (7.89%) 41047 (12.86%) 42424 (13.29%) 0.99 (0 - 1)
Stretch 43411 (13.60%) 199442 (62.49%) 59472 (18.63%) 16833 (5.27%) 0 (0%) 0.89 (0 - 1) Taper 319016 (99.96%) 138 (0.04%) 4 (0%) 0 (0%) 0 (0%) 0.56 (0 - 1)
Volume 81.925 (39.40%) 92773 (29.07%) 60584 (18.98%) 35630 (11.16%) 4412 (1.38%) 327.7 (0 - 327.7)
Tab. A9 – Parâmetros de qualidade das malhas para a malha estruturada de 319158 elementos utilizada no modelo k-ε.
831128 0 - 0,25 0,25 - 0,5 0,5 - 0,7 0,7 - 0,9 0,9 - 1 Pior Elemento Aspect Ratio 643464 (77.42%) 177855 (21.40%) 9350 (1.12%) 447 (0.05%) 12 (0%) 10.1 (0 - 10.1)
Diagonal Ratio 615348 (74.04%) 205048 (24.67%) 8904 (1.07%) 1758 (0.21%) 70 (0.01%) 7.1 (0 - 7.1) Edge Ratio 830992 (99.98%) 61 (0.01%) 37 (0%) 27 (0%) 11 (0%) 30.4 (0 - 30.4)
EquiAngle Skew 486514 (58.54%) 123382 (14.85%) 101321 (12.19%) 118773 (14.29%) 1138 (0.14%) 0.95 (0 - 1) EquiSize Skew 486514 (58.54%) 123382 (14.85%) 101321 (12.19%) 118773 (14.29%) 1138 (0.14%) 0.95 (0 - 1) MidAngle Skew 385199 (46.35%) 167091 (20.10%) 62992 (7.58%) 111816 (13.45%) 104030 (12.52%) 0.99 (0 - 1)
Stretch 131499 (15.82%) 529622 (63.72%) 157078 (18.90%) 12833 (1.54%) 96 (0.01%) 0.96 (0 - 1) Taper 830855 (99.97%) 195 (0.02%) 53 (0.01%) 25 (0%) 0 (0%) 0.81 (0 - 1)
Volume 330534 (39.77%) 268976 (32.36%) 164205 (19.76%) 62076 (7.47%) 5337 (0.64%) 131.9 (0 - 131.9)
Tab. A10 – Parâmetros de qualidade das malhas para a malha estruturada de 831128 elementos utilizada no modelo k-ε.
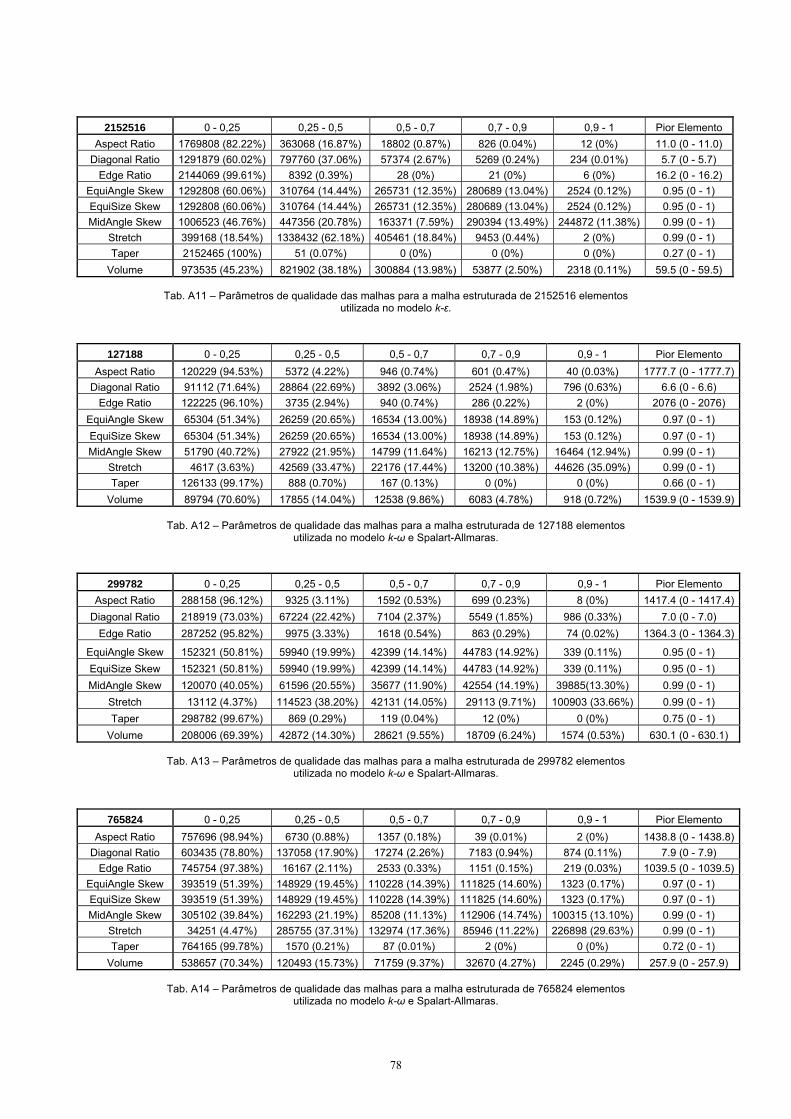
78
2152516 0 - 0,25 0,25 - 0,5 0,5 - 0,7 0,7 - 0,9 0,9 - 1 Pior Elemento Aspect Ratio 1769808 (82.22%) 363068 (16.87%) 18802 (0.87%) 826 (0.04%) 12 (0%) 11.0 (0 - 11.0)
Diagonal Ratio 1291879 (60.02%) 797760 (37.06%) 57374 (2.67%) 5269 (0.24%) 234 (0.01%) 5.7 (0 - 5.7) Edge Ratio 2144069 (99.61%) 8392 (0.39%) 28 (0%) 21 (0%) 6 (0%) 16.2 (0 - 16.2)
EquiAngle Skew 1292808 (60.06%) 310764 (14.44%) 265731 (12.35%) 280689 (13.04%) 2524 (0.12%) 0.95 (0 - 1) EquiSize Skew 1292808 (60.06%) 310764 (14.44%) 265731 (12.35%) 280689 (13.04%) 2524 (0.12%) 0.95 (0 - 1) MidAngle Skew 1006523 (46.76%) 447356 (20.78%) 163371 (7.59%) 290394 (13.49%) 244872 (11.38%) 0.99 (0 - 1)
Stretch 399168 (18.54%) 1338432 (62.18%) 405461 (18.84%) 9453 (0.44%) 2 (0%) 0.99 (0 - 1) Taper 2152465 (100%) 51 (0.07%) 0 (0%) 0 (0%) 0 (0%) 0.27 (0 - 1)
Volume 973535 (45.23%) 821902 (38.18%) 300884 (13.98%) 53877 (2.50%) 2318 (0.11%) 59.5 (0 - 59.5)
Tab. A11 – Parâmetros de qualidade das malhas para a malha estruturada de 2152516 elementos utilizada no modelo k-ε.
127188 0 - 0,25 0,25 - 0,5 0,5 - 0,7 0,7 - 0,9 0,9 - 1 Pior Elemento Aspect Ratio 120229 (94.53%) 5372 (4.22%) 946 (0.74%) 601 (0.47%) 40 (0.03%) 1777.7 (0 - 1777.7)
Diagonal Ratio 91112 (71.64%) 28864 (22.69%) 3892 (3.06%) 2524 (1.98%) 796 (0.63%) 6.6 (0 - 6.6) Edge Ratio 122225 (96.10%) 3735 (2.94%) 940 (0.74%) 286 (0.22%) 2 (0%) 2076 (0 - 2076)
EquiAngle Skew 65304 (51.34%) 26259 (20.65%) 16534 (13.00%) 18938 (14.89%) 153 (0.12%) 0.97 (0 - 1) EquiSize Skew 65304 (51.34%) 26259 (20.65%) 16534 (13.00%) 18938 (14.89%) 153 (0.12%) 0.97 (0 - 1) MidAngle Skew 51790 (40.72%) 27922 (21.95%) 14799 (11.64%) 16213 (12.75%) 16464 (12.94%) 0.99 (0 - 1)
Stretch 4617 (3.63%) 42569 (33.47%) 22176 (17.44%) 13200 (10.38%) 44626 (35.09%) 0.99 (0 - 1) Taper 126133 (99.17%) 888 (0.70%) 167 (0.13%) 0 (0%) 0 (0%) 0.66 (0 - 1)
Volume 89794 (70.60%) 17855 (14.04%) 12538 (9.86%) 6083 (4.78%) 918 (0.72%) 1539.9 (0 - 1539.9)
Tab. A12 – Parâmetros de qualidade das malhas para a malha estruturada de 127188 elementos utilizada no modelo k-ω e Spalart-Allmaras.
299782 0 - 0,25 0,25 - 0,5 0,5 - 0,7 0,7 - 0,9 0,9 - 1 Pior Elemento Aspect Ratio 288158 (96.12%) 9325 (3.11%) 1592 (0.53%) 699 (0.23%) 8 (0%) 1417.4 (0 - 1417.4)
Diagonal Ratio 218919 (73.03%) 67224 (22.42%) 7104 (2.37%) 5549 (1.85%) 986 (0.33%) 7.0 (0 - 7.0) Edge Ratio 287252 (95.82%) 9975 (3.33%) 1618 (0.54%) 863 (0.29%) 74 (0.02%) 1364.3 (0 - 1364.3)
EquiAngle Skew 152321 (50.81%) 59940 (19.99%) 42399 (14.14%) 44783 (14.92%) 339 (0.11%) 0.95 (0 - 1) EquiSize Skew 152321 (50.81%) 59940 (19.99%) 42399 (14.14%) 44783 (14.92%) 339 (0.11%) 0.95 (0 - 1) MidAngle Skew 120070 (40.05%) 61596 (20.55%) 35677 (11.90%) 42554 (14.19%) 39885(13.30%) 0.99 (0 - 1)
Stretch 13112 (4.37%) 114523 (38.20%) 42131 (14.05%) 29113 (9.71%) 100903 (33.66%) 0.99 (0 - 1) Taper 298782 (99.67%) 869 (0.29%) 119 (0.04%) 12 (0%) 0 (0%) 0.75 (0 - 1)
Volume 208006 (69.39%) 42872 (14.30%) 28621 (9.55%) 18709 (6.24%) 1574 (0.53%) 630.1 (0 - 630.1)
Tab. A13 – Parâmetros de qualidade das malhas para a malha estruturada de 299782 elementos utilizada no modelo k-ω e Spalart-Allmaras.
765824 0 - 0,25 0,25 - 0,5 0,5 - 0,7 0,7 - 0,9 0,9 - 1 Pior Elemento Aspect Ratio 757696 (98.94%) 6730 (0.88%) 1357 (0.18%) 39 (0.01%) 2 (0%) 1438.8 (0 - 1438.8)
Diagonal Ratio 603435 (78.80%) 137058 (17.90%) 17274 (2.26%) 7183 (0.94%) 874 (0.11%) 7.9 (0 - 7.9) Edge Ratio 745754 (97.38%) 16167 (2.11%) 2533 (0.33%) 1151 (0.15%) 219 (0.03%) 1039.5 (0 - 1039.5)
EquiAngle Skew 393519 (51.39%) 148929 (19.45%) 110228 (14.39%) 111825 (14.60%) 1323 (0.17%) 0.97 (0 - 1) EquiSize Skew 393519 (51.39%) 148929 (19.45%) 110228 (14.39%) 111825 (14.60%) 1323 (0.17%) 0.97 (0 - 1) MidAngle Skew 305102 (39.84%) 162293 (21.19%) 85208 (11.13%) 112906 (14.74%) 100315 (13.10%) 0.99 (0 - 1)
Stretch 34251 (4.47%) 285755 (37.31%) 132974 (17.36%) 85946 (11.22%) 226898 (29.63%) 0.99 (0 - 1) Taper 764165 (99.78%) 1570 (0.21%) 87 (0.01%) 2 (0%) 0 (0%) 0.72 (0 - 1)
Volume 538657 (70.34%) 120493 (15.73%) 71759 (9.37%) 32670 (4.27%) 2245 (0.29%) 257.9 (0 - 257.9)
Tab. A14 – Parâmetros de qualidade das malhas para a malha estruturada de 765824 elementos utilizada no modelo k-ω e Spalart-Allmaras.
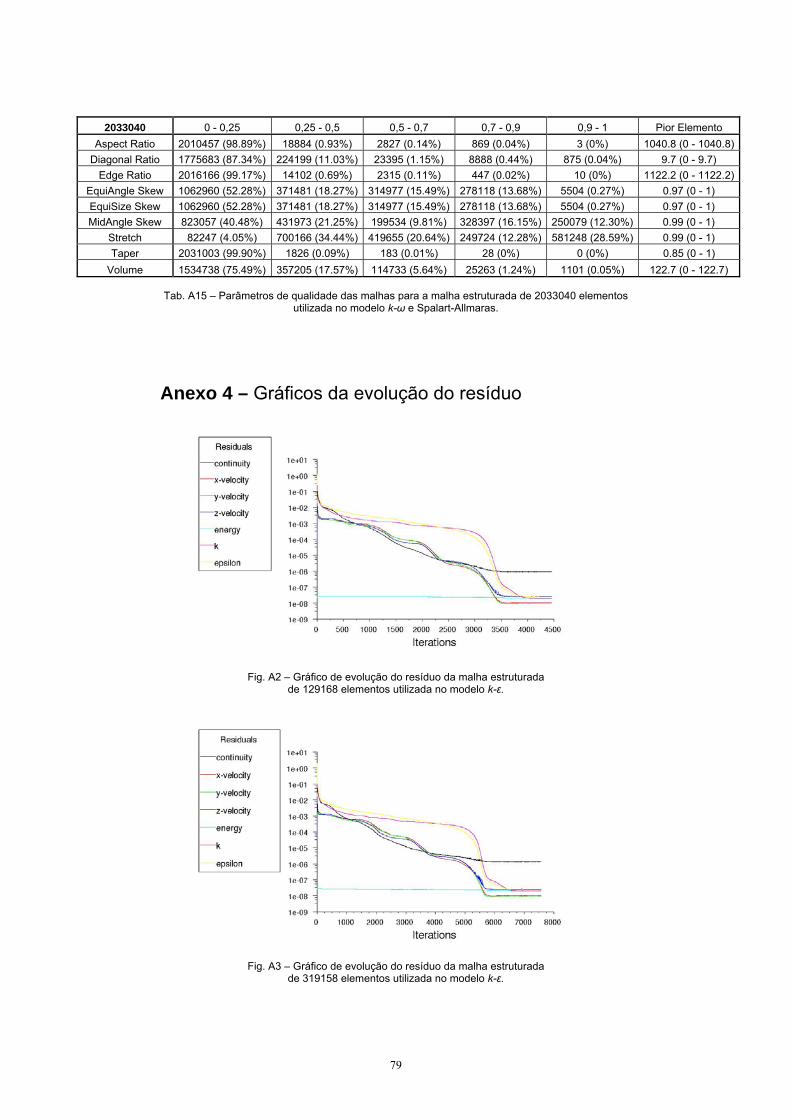
79
2033040 0 - 0,25 0,25 - 0,5 0,5 - 0,7 0,7 - 0,9 0,9 - 1 Pior Elemento Aspect Ratio 2010457 (98.89%) 18884 (0.93%) 2827 (0.14%) 869 (0.04%) 3 (0%) 1040.8 (0 - 1040.8)
Diagonal Ratio 1775683 (87.34%) 224199 (11.03%) 23395 (1.15%) 8888 (0.44%) 875 (0.04%) 9.7 (0 - 9.7) Edge Ratio 2016166 (99.17%) 14102 (0.69%) 2315 (0.11%) 447 (0.02%) 10 (0%) 1122.2 (0 - 1122.2)
EquiAngle Skew 1062960 (52.28%) 371481 (18.27%) 314977 (15.49%) 278118 (13.68%) 5504 (0.27%) 0.97 (0 - 1) EquiSize Skew 1062960 (52.28%) 371481 (18.27%) 314977 (15.49%) 278118 (13.68%) 5504 (0.27%) 0.97 (0 - 1) MidAngle Skew 823057 (40.48%) 431973 (21.25%) 199534 (9.81%) 328397 (16.15%) 250079 (12.30%) 0.99 (0 - 1)
Stretch 82247 (4.05%) 700166 (34.44%) 419655 (20.64%) 249724 (12.28%) 581248 (28.59%) 0.99 (0 - 1) Taper 2031003 (99.90%) 1826 (0.09%) 183 (0.01%) 28 (0%) 0 (0%) 0.85 (0 - 1)
Volume 1534738 (75.49%) 357205 (17.57%) 114733 (5.64%) 25263 (1.24%) 1101 (0.05%) 122.7 (0 - 122.7)
Tab. A15 – Parâmetros de qualidade das malhas para a malha estruturada de 2033040 elementos utilizada no modelo k-ω e Spalart-Allmaras.
Anexo 4 – Gráficos da evolução do resíduo
Fig. A2 – Gráfico de evolução do resíduo da malha estruturada de 129168 elementos utilizada no modelo k-ε.
Fig. A3 – Gráfico de evolução do resíduo da malha estruturada de 319158 elementos utilizada no modelo k-ε.
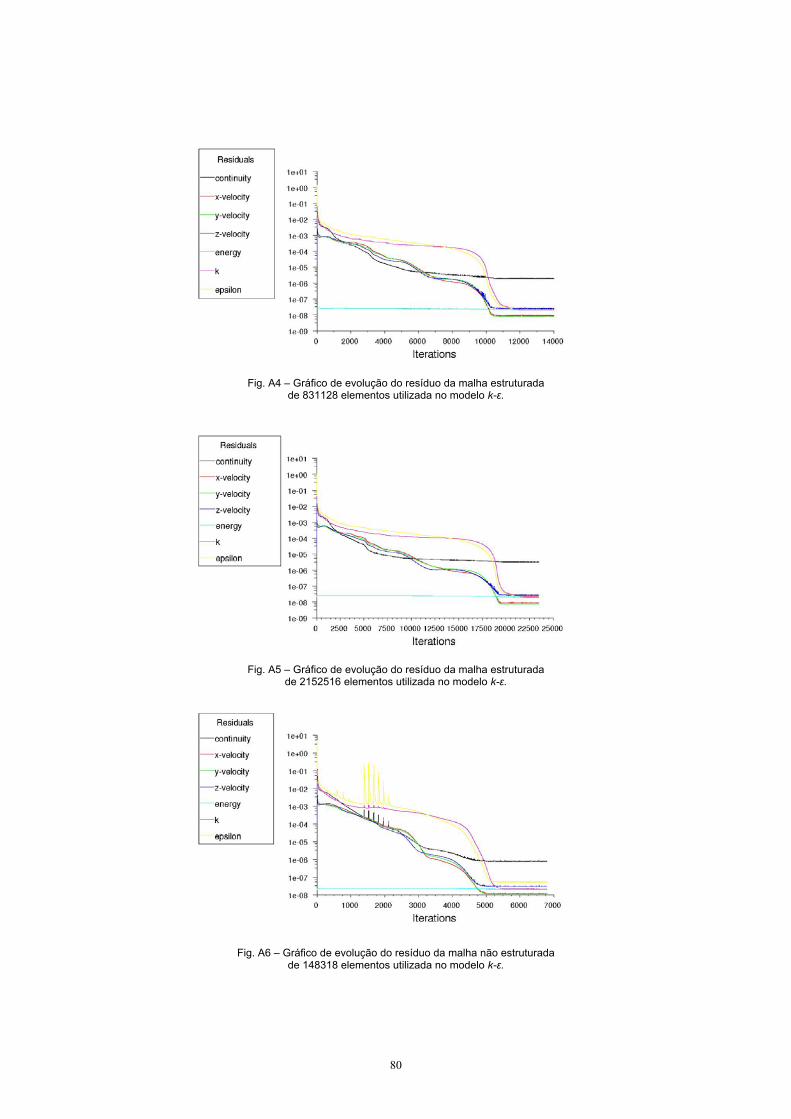
80
Fig. A4 – Gráfico de evolução do resíduo da malha estruturada de 831128 elementos utilizada no modelo k-ε.
Fig. A5 – Gráfico de evolução do resíduo da malha estruturada de 2152516 elementos utilizada no modelo k-ε.
Fig. A6 – Gráfico de evolução do resíduo da malha não estruturada de 148318 elementos utilizada no modelo k-ε.
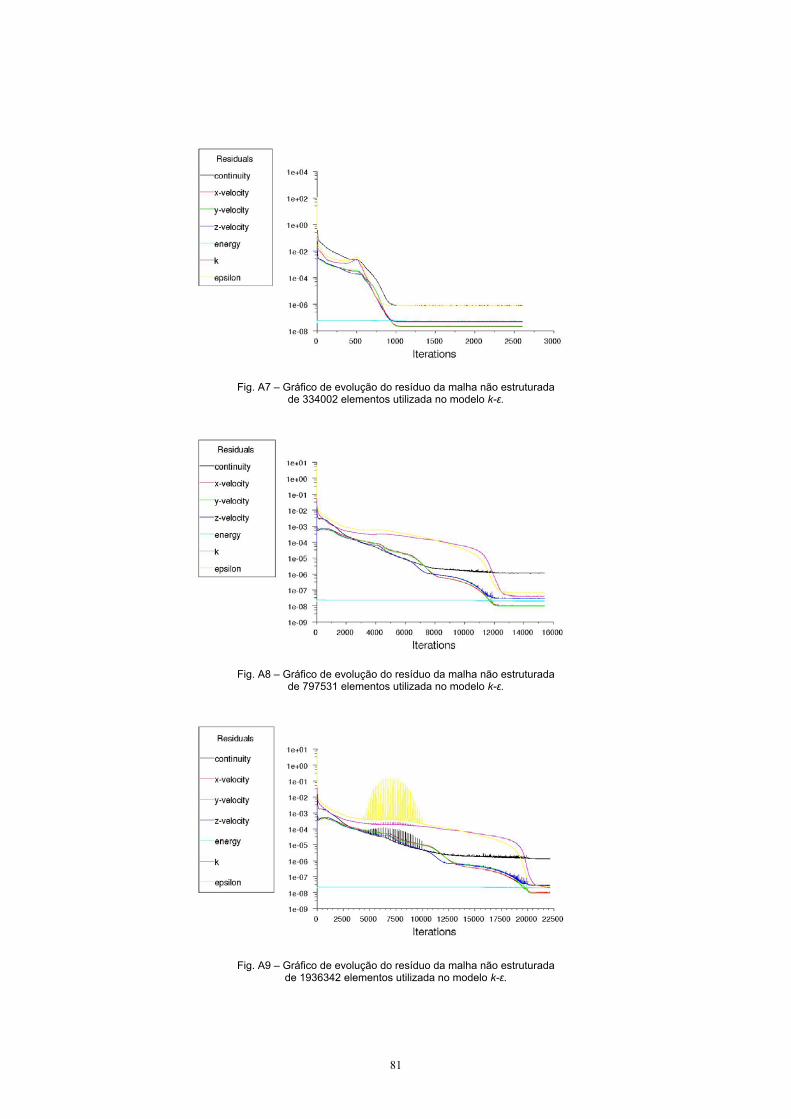
81
Fig. A7 – Gráfico de evolução do resíduo da malha não estruturada de 334002 elementos utilizada no modelo k-ε.
Fig. A8 – Gráfico de evolução do resíduo da malha não estruturada de 797531 elementos utilizada no modelo k-ε.
Fig. A9 – Gráfico de evolução do resíduo da malha não estruturada de 1936342 elementos utilizada no modelo k-ε.
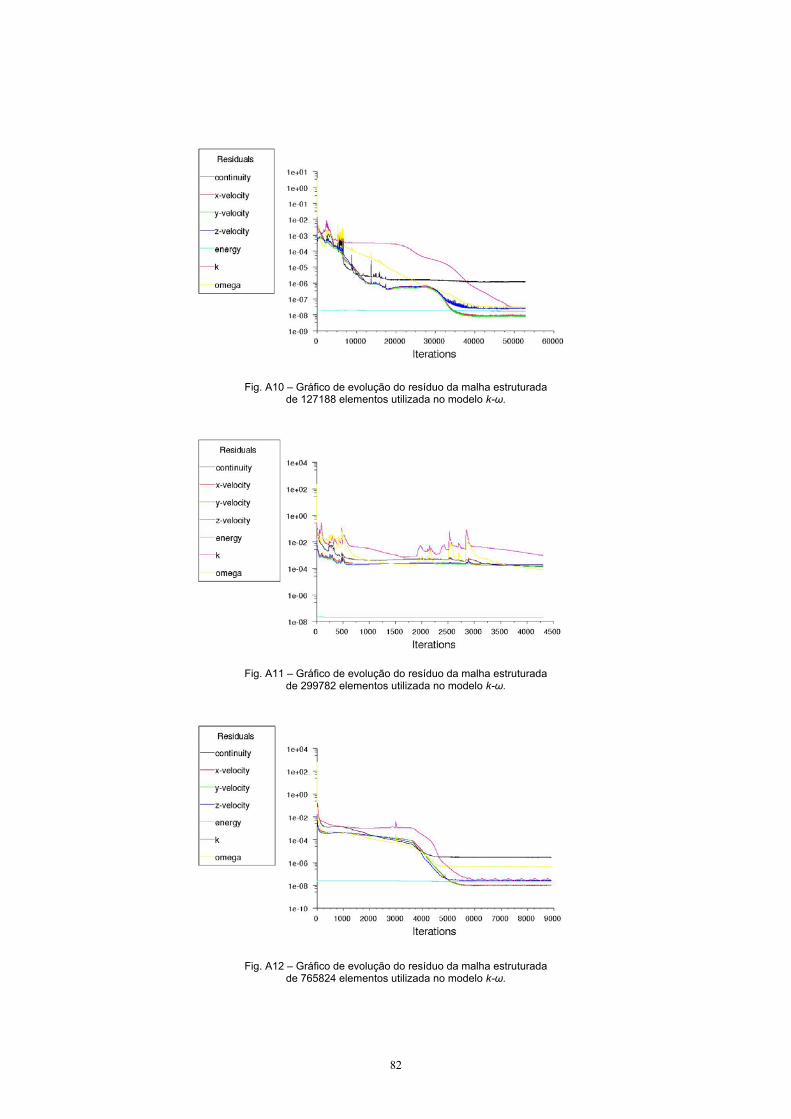
82
Fig. A10 – Gráfico de evolução do resíduo da malha estruturada de 127188 elementos utilizada no modelo k-ω.
Fig. A11 – Gráfico de evolução do resíduo da malha estruturada de 299782 elementos utilizada no modelo k-ω.
Fig. A12 – Gráfico de evolução do resíduo da malha estruturada de 765824 elementos utilizada no modelo k-ω.
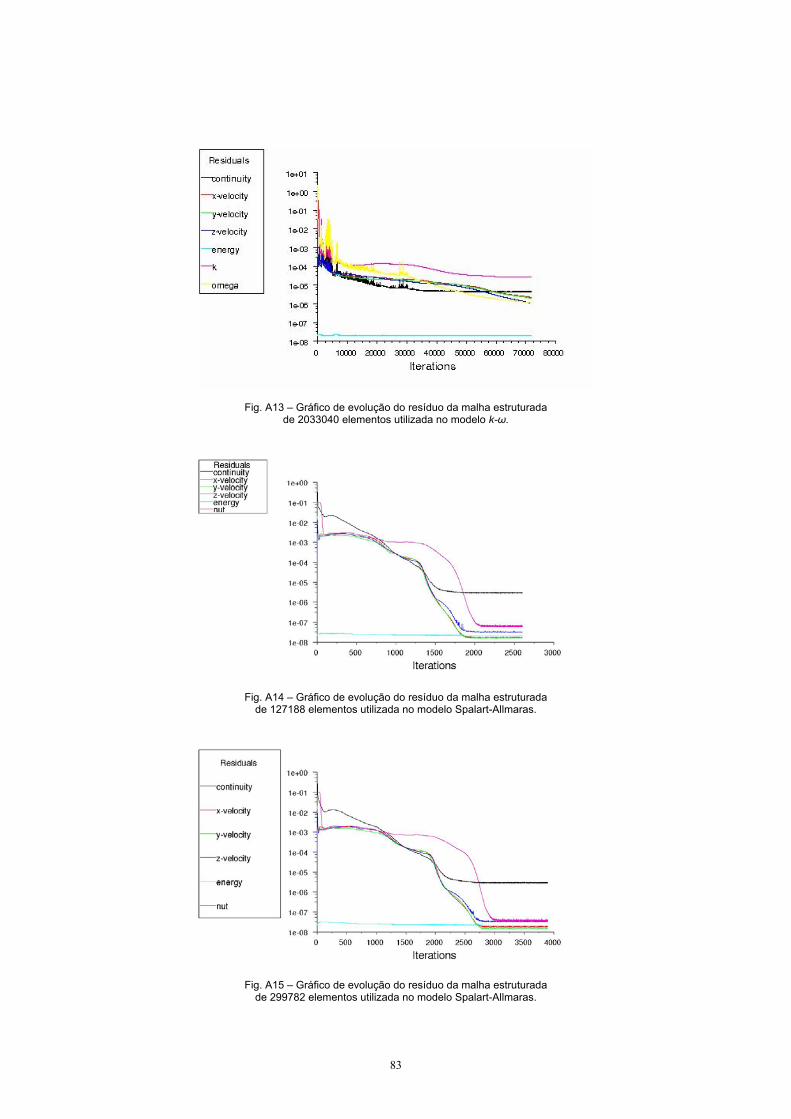
83
Fig. A13 – Gráfico de evolução do resíduo da malha estruturada de 2033040 elementos utilizada no modelo k-ω.
Fig. A14 – Gráfico de evolução do resíduo da malha estruturada de 127188 elementos utilizada no modelo Spalart-Allmaras.
Fig. A15 – Gráfico de evolução do resíduo da malha estruturada de 299782 elementos utilizada no modelo Spalart-Allmaras.
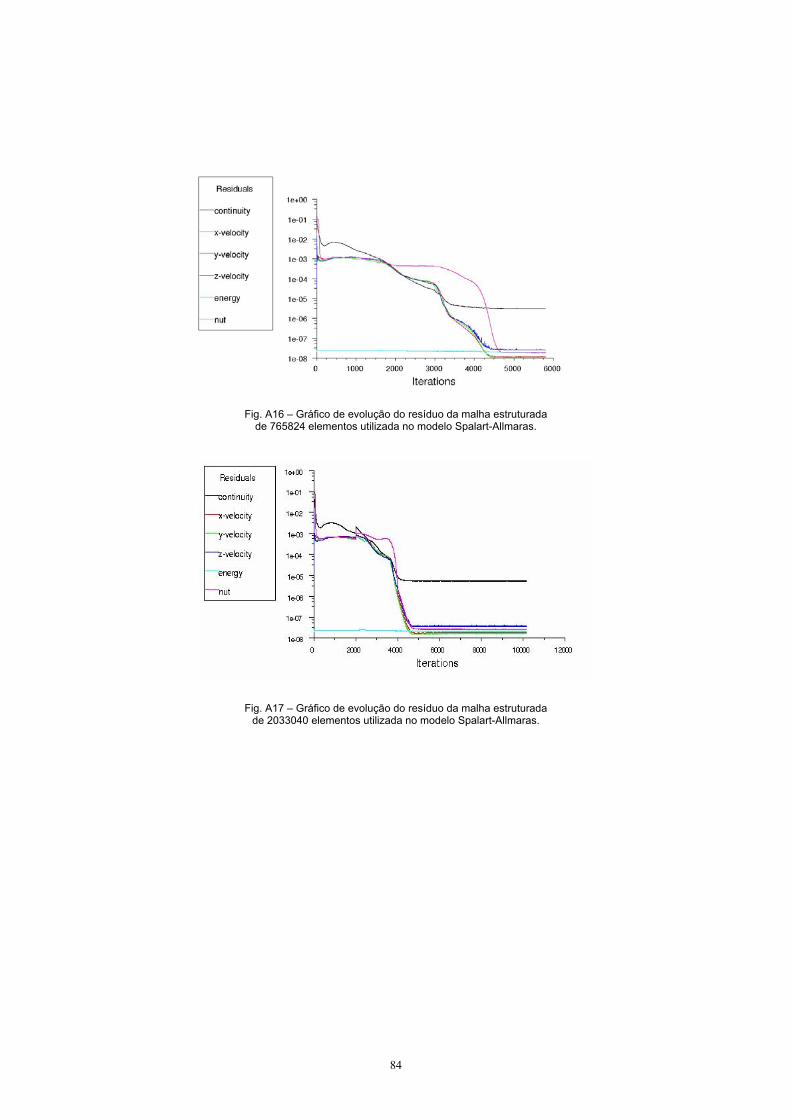
84
Fig. A16 – Gráfico de evolução do resíduo da malha estruturada de 765824 elementos utilizada no modelo Spalart-Allmaras.
Fig. A17 – Gráfico de evolução do resíduo da malha estruturada de 2033040 elementos utilizada no modelo Spalart-Allmaras.