kinematics 1: fundamentals of orthogonal · pdf filemobile robot systems alonzo kelly january...
TRANSCRIPT
Alon
1
K
tics is Importantg is one of the mostools of robotics.
g:
ontroline programming and
s specifically, you needr:
trol, simulation)age formation)
d and communicat ionging (maps, object models)ing (motion prediction)f legged vehicles
zo Kelly January 12, 2005
• perception (im• sensor heaantenna pointin• world modell• terrain follow• gait control o
Mobile Robot Systems
inematics 1: Fundamentals of Orthogonal Transforms
1 Why KinemaKinematic modellinimportant analytical t
• Used for modellin• mechanisms• actuators• sensors
• Used for on-line c• Used for off - lsimulation• In mobile robotkinematic models fo
• steering (con
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms2
2 2.1
•n
•t•n
2.2
•
to represent:hich change the entity)s (wh ich cha nge t he
Frames (which represent
perscripts
pts such as the 1 in ity from another, such as
ripts such as the in ate system within whichere) is represented. Theseoordinate system frome same point.
rm of shorthand for trig
p1
b pb
ψ1 ψ2 ψ3+ +( )1)
zo Kelly January 12, 2005
Points, Operators, Etc.
Vectors are used to represent points.
T tyx tyy tyz
tzx tzy tzz
= 2.4 Trig Functions
• We often use a fofunctions:
c123 cos=
s1 ψ(sin=
Mobile Robot Systems 2 Notational Conventions2.1Vectors and Matrices
Notational Conventions Vectors and Matrices
Vectors are represented as columns ofumbers:
Sometimes will be written to emphasizehat it is a vector. Matrices are represented by an array ofumbers:
p x y zT=
p p
txx txy txz
• Matrices are used • Operators (w• Tr ans fo rmrepresentation)• Coordinate rigid bodies)
2.3 Subscripts and su
• Leading subscridistinguish one ent
.• Leading superscdenotes the coordinthe object (a point hdistinguish one canother - even for th
p2
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms3
2.5
•vv
2.6
•mee
t ion i s such tha t thebscripts provide a hint ofing that the a’s cancel:
Tabpa=
zo Kelly January 12, 2005
Converting Coordinates
Suppose the 4 X 4 matrix denotes theatrix which transforms a vector from its
xpression in coordinate system ‘a’ to itsxpression in coordinate system ‘b’.
x∂a Jacobian tensor
Tab
Mobile Robot Systems 2 Notational Conventions2.5Derivatives
Derivatives
All combinations of derivatives of (scalars,ectors, matrices) with respect to (scalars,ectors, matrices) are defined and meaningful.
x∂∂y
x∂∂y
x∂∂
y
a partial derivative
a gradient vector
a vector partial derivative
x∂∂
y
∂Y
a Jacobian matrix
x∂∂Y a matrix partial derivative
• Then , t he no tasuperscripts and suthe result by imagin
pb
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms4
3 •i•gi
w
formation preserves linesry transformation). That points are on a line, their on a line.
preserve the distance, and hence, it may notr angles between lines.2 transformation is ann for which .
ormation does not includedoes include all the others
ansformation transformsctangular coordinates to
are mutually orthogonalgth, thus.
is “linear”, the equation b Ax 0=
t1 t2 0= =
r11 r12
r21 r22
x1
y1
zo Kelly January 12, 2005
• scale• reflections• shear.
1. see “Encyclopedia of Mathematics”, ed. by I. M. Vinogradov, Kluwer, 1988 and/or “Mathematics Dictionary”, Van Nostrand, 1992.
• an orthogonal trfrom one set of reanother.
• Its columns and of unit len
2. While the equation is “homogeneous”.
Ax =
Mobile Robot Systems 3 Definitions2.6Converting Coordinates
Definitions consider linear relationships between pointsn 2D. an affine transformation1 is the mosteneral linear transformation possible. In 2Dt looks like:
here the r’s and t’s are constants. • Such a transformation includes:
• translation• rotation
x2
y2
r11 r12
r21 r22
x1
y1
t1
t2
+=
• Such a trans(aka collineatois, if two inputoutputs are also• It may notbetween thempreserve area o
• a homogeneousaffine transformatio
• Such a transftranslation but above.
x2
y2
=
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms5
tion
neous Transformsa matrix and a vector is matrix is a mapping fromectors. of a matrix is that of an
s which maps points onto
projective coordinates are property that the object does not change if all of
e multiplied by the sameThey are “unique up to a
ordinates are a method oftities by the projections of3D subspace. Followingy you would use such an
h Translation
ply a 3D point by the most
zo Kelly January 12, 2005
points establish whawkward construct.
4.1 The Problem wit
• Suppose we multigeneral 3X3 matrix:
Mobile Robot Systems 4 Why Homogeneous Transforms4.1The Problem with Transla
• Such a transformation preserves thedistance between two points, so it isrigid.• It therefore also preserves lengths,areas, and angles.• It does not scale, reflect, or shear. Onlyrotation is left.
r11r12 r21r22+ 0=
r11r11 r21r21+ 1=
r12r12 r22r22+ 1=
4 Why Homoge• The product of another vector. So avectors onto other v• So......... One viewoperator - a procesother points. • Homogeneous or those “having thedetermined by themthe coordinates arnonzero number”. scale factor”.• Homogeneous corepresenting 3D en4D entities onto a
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms6
Coordinates
•opet•sv
epresented as a l ineare elements of - it ispendent of .ogeneous Coordinates
be fixed with a standardeous coordinates, (akates) an extra element, ,
h point to represent a kind
nal to consider that this 4-” into 3D by dividing by
y represented with a scale
p1p1
w1
1 y1 z1 w1
T
x1
w1------
y1
w1------
z1
w1------
T
1 y1 z1 1T
zo Kelly January 12, 2005
imple addition of a constant vector to anotherector like:
p2 p1 pk+
x1
y1
z1
xk
yk
zk
+= = • Points are typicallfactor of 1. Thus:
p1 =
p1̃ x=
Mobile Robot Systems 4 Why Homogeneous Transforms4.2Introducing Homogeneous
This most general transform can representperators like scale, reflection, rotation, shear,rojection. Why? because all of these can bexpressed as constant linear combinations ofhe coordinates of the input vector. However, this 3X3 matrix cannot represent a
p2
x2
y2
z2
Tp1= =
Tp1
txx txy txz
tyx tyy tyz
tzx tzy tzz
x1
y1
z1
txxx1 txyy1 txzz1+ +
tyxx1 tyyy1 tyzz1+ +
tzxx1 tzyy1 tzzz1+ +
= =
• cannot be rcombination of thsupposed to be inde
4.2 Introducing Hom
• The situation cantrick. In homogenprojective coordinacan be added to eacof scale factor:
• and it is conventiovector is “projectedthe scale factor:
p2
p1̃ x=
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms7
eous Transforms
iNc•du
i•c
4.3
•i•pv
i s t h e homogeneousequivalent to a translationslation vector . sforms can also representear operations such ason. They do this by hiding the normalization by the
x1
y1
z1
1
xk
yk
zk
1
+
Trans pk( )p1
= =
=
pk
zo Kelly January 12, 2005
Using homogeneous coordinates, it is nowossible to represent the addition of twoectors as a matrix operation, thus:
the nonlinearity inscale factor.
Mobile Robot Systems 4 Why Homogeneous Transforms4.3Translation with Homogen
s a point in homogeneous coordinates.otationally, is the homogeneous point
orresponding to . It is also possible to represent a pureirection in terms of a point at infinity bysing a scale factor of 0. Thus:
s a direction in homogeneous coordinates. From now on, we will drop the ‘~’ and useontext to distinguish these. Translation with Homogeneous
Transforms
A (3D) matrix in homogeneous coordinatess a 4X4 matrix.
p1̃p1
q1̃ x1 y1 z1 0T
=
where transform which is operator for the tran• Homogeneous transomewhat nonlinperspective projecti
p2 p1 pk+
1 0 0 xk
0 1 0 yk
0 0 1 zk
0 0 0 1
x1
y1
z1
1
=
Trans pk( )
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms8
as Operators
5 Thho- tint
5.1
•seso•Hcs•ttop
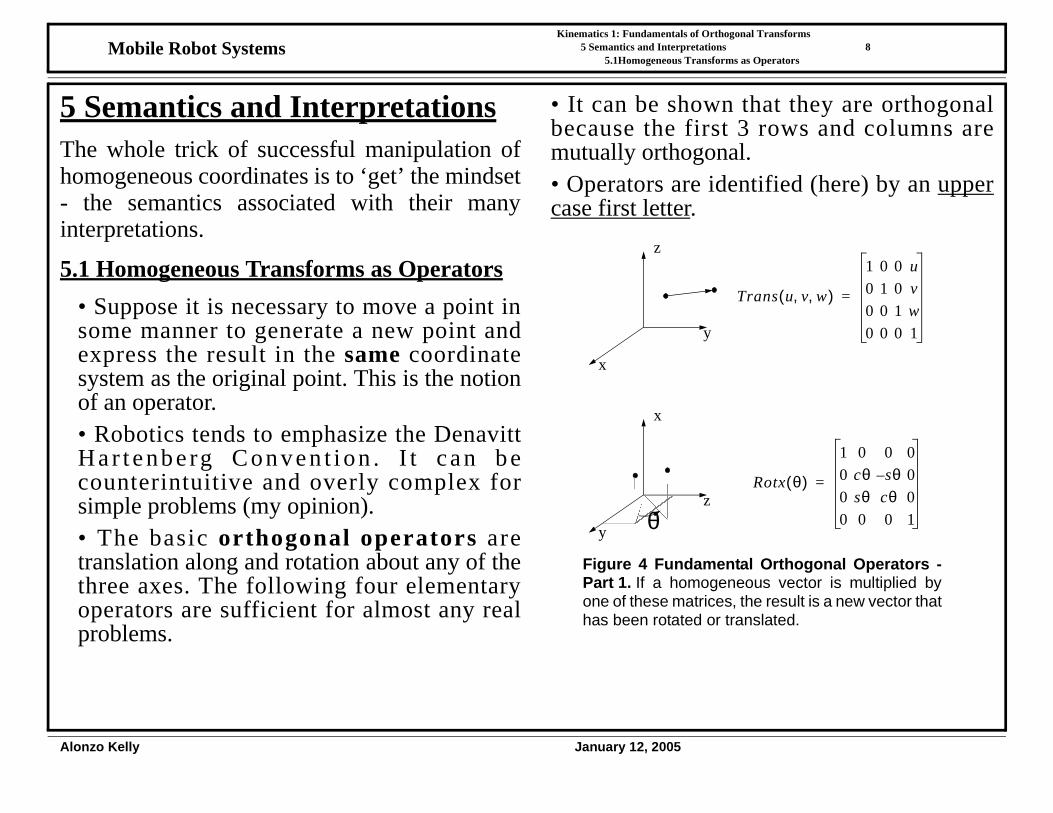
that they are orthogonal3 rows and columns arel.ntified (here) by an upper
Trans u v w, ,( )
1 0 0 u
0 1 0 v
0 0 1 w
0 0 0 1
=
Rotx θ( )
1 0 0 0
0 cθ sθ– 0
0 sθ cθ 0
0 0 0 1
=
al Orthogonal Operators -ous vector is multiplied by
the result is a new vector thatnslated.
zo Kelly January 12, 2005
The basic orthogonal operators areranslation along and rotation about any of thehree axes. The following four elementaryperators are sufficient for almost any realroblems.
y θ
Figure 4 FundamentPart 1. If a homogeneone of these matrices, has been rotated or tra
Mobile Robot Systems 5 Semantics and Interpretations5.1Homogeneous Transforms
Semantics and Interpretationse whole trick of successful manipulation ofmogeneous coordinates is to ‘get’ the mindsethe semantics associated with their manyerpretations.
Homogeneous Transforms as Operators
Suppose it is necessary to move a point inome manner to generate a new point andxpress the result in the same coordinateystem as the original point. This is the notionf an operator. Robotics tends to emphasize the Denavitta r t e nb e rg C on v e n t i on . I t c a n b e
ounterintuitive and overly complex forimple problems (my opinion).
• It can be shown because the first mutually orthogona• Operators are idecase first letter.
x
y
z
z
x
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms9
Point
5.2
•t
•t
and then rotating the0° around the x axis. portant because matrixt commutative. not important becauseion is associative, so theultiplied together beforenit, to the point.he initial point, and final in terms of the axes of the system. Operators haveding semantics.ting on a Direction
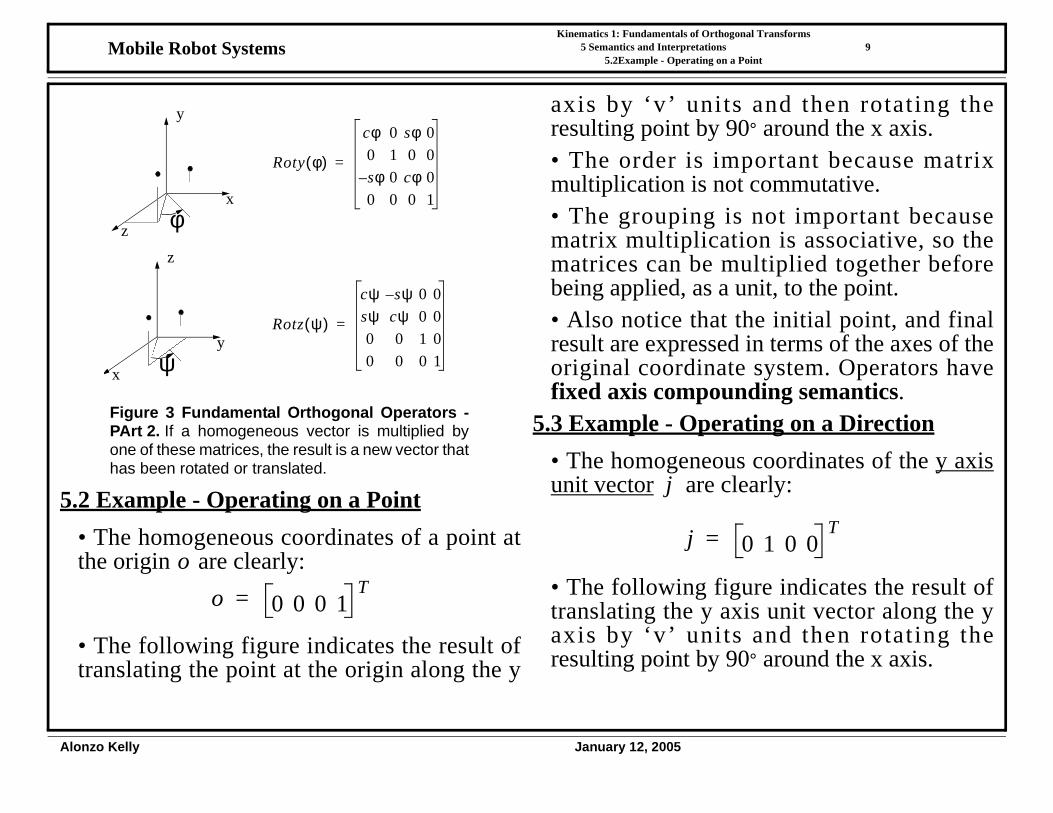
coordinates of the y axisearly:
ure indicates the result ofis unit vector along the y and then rotating the
0° around the x axis.
0 1 0 0T
zo Kelly January 12, 2005
The homogeneous coordinates of a point athe origin are clearly:
The following figure indicates the result ofranslating the point at the origin along the y
o
o 0 0 0 1T= • The following fig
translating the y axaxis by ‘v’ unitsresulting point by 9
j =
Mobile Robot Systems 5 Semantics and Interpretations5.2Example - Operating on a
Example - Operating on a Point
z
x
y
φ
Roty φ( )
cφ 0 sφ 0
0 1 0 0
s– φ 0 cφ 0
0 0 0 1
=
x
y
z
ψ
Rotz ψ( )
cψ s– ψ 0 0
sψ cψ 0 0
0 0 1 0
0 0 0 1
=
Figure 3 Fundamental Orthogonal Operators -PArt 2. If a homogeneous vector is multiplied byone of these matrices, the result is a new vector thathas been rotated or translated.
axis by ‘v’ unitsresulting point by 9• The order is immultiplication is no• The grouping ismatrix multiplicatmatrices can be mbeing applied, as a u• Also notice that tresult are expressedoriginal coordinatefixed axis compoun
5.3 Example - Opera
• The homogeneousunit vector are clj
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms10
Direction
y
z
)Trans 0 v 0, ,( ) j
1 0 0 0
0 1 0 v
0 0 1 0
0 0 0 1
0
1
0
0
0
0
1
0
=
=
j 0 1 0 0T=
0T
ng on a Direction
zo Kelly January 12, 2005
1 0 0 0
0 0 1– 00 1 0 0
0 0 0 1
0
v
0
1
0
0v
1
=
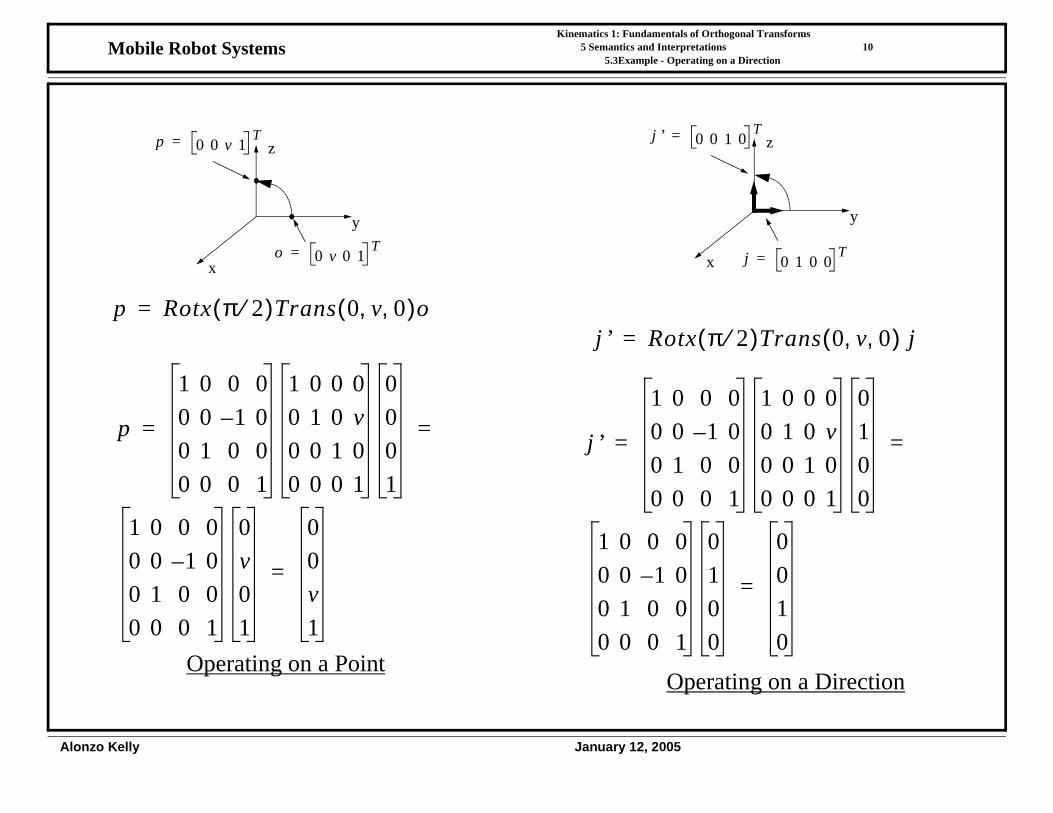
Operating on a Point
1 0 0 0
0 0 1– 0
0 1 0 0
0 0 0 1
0
1
0
0
Operati
Mobile Robot Systems 5 Semantics and Interpretations5.3Example - Operating on a
x
y
z
p Rotx π 2⁄( )Trans 0 v 0, ,( )o=
p
1 0 0 0
0 0 1– 0
0 1 0 0
0 0 0 1
1 0 0 0
0 1 0 v
0 0 1 0
0 0 0 1
0
0
0
1
= =
o 0 v 0 1T=
p 0 0 v 1T=
x
j ’ Rotx π 2⁄(=
j ’
1 0 0 0
0 0 1– 0
0 1 0 0
0 0 0 1
=
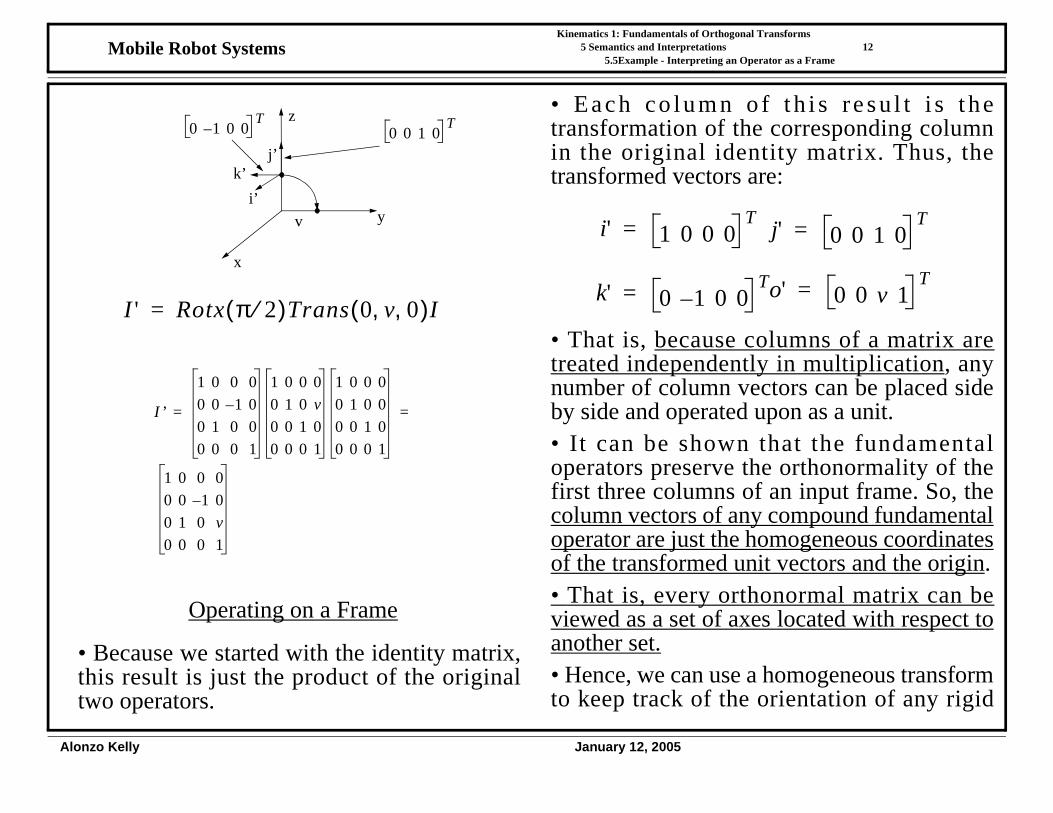
j ’ 0 0 1=
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms11
as Coordinate Frames
•c•rst
5.4
•sx
•gcm
unit vectors and origin a
he identity matrix can benit vectors and the originem. lying an operator to these similar interpretation -ectors at a new position -
shows:reting an Operator as a
epresenting the orientationframe at the origin can beaneously by applying the of the last example to the
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
I=
zo Kelly January 12, 2005
Therefore, these three columns can berouped together with the homogeneousoordinates of the origin to form an identityatrix:
Frame
• The four vectors rand position of the transformed simultsame two operatorsidentity matrix:
Mobile Robot Systems 5 Semantics and Interpretations5.4Homogeneous Transforms
Note that the t ranslat ion part of theompound operation has no effect. The result is the z axis unit vector, sootation works just as before, so having a zerocale factor disables translation and allows uso represent a pure direction. Homogeneous Transforms as Coordinate
Frames
The unit vectors of a cartesian coordinateystem can be considered to be directions. The, y, and z unit vectors can be written as:
i 1 0 0 0T= j 0 1 0 0
T=
k 0 0 1 0T=
• We will call the basis.• The columns of tinterpreted as the uof a coordinate syst• The result of appfour vectors has aanother set of unit vas the next example
5.5 Example - Interp
i j k o =
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms12
Operator as a Frame
•tt
o f t h i s r e s u l t i s t hehe corresponding columnntity matrix. Thus, the
are:
columns of a matrix aretly in multiplication, anyvectors can be placed side upon as a unit. that the fundamental
the orthonormality of theof an input frame. So, theny compound fundamental homogeneous coordinatesnit vectors and the origin.thonormal matrix can bexes located with respect to
a homogeneous transforme orientation of any rigid
Tj' 0 0 1 0
T=
To' 0 0 v 1T=
zo Kelly January 12, 2005
Because we started with the identity matrix,his result is just the product of the originalwo operators.
0 1 0 v
0 0 0 1
Operating on a Frame
column vectors of aoperator are just theof the transformed u• That is, every orviewed as a set of aanother set.• Hence, we can useto keep track of th
Mobile Robot Systems 5 Semantics and Interpretations5.5Example - Interpreting an
I ' Rotx π 2⁄( )Trans 0 v 0, ,( )I=
I ’
1 0 0 0
0 0 1– 0
0 1 0 0
0 0 0 1
1 0 0 0
0 1 0 v
0 0 1 0
0 0 0 1
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
1 0 0 0
0 0 1– 0
= =
x
y
j’
v
k’
i’
0 1– 0 0T
0 0 1 0Tz
• Eac h co lu m n transformation of tin the original idetransformed vectors
• That is, because treated independennumber of column by side and operated• It can be shownoperators preserve first three columns
i' 1 0 0 0=
k' 0 1– 0 0=
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms13
bi•ttfm•bots
5.6
•o•srii ixed axis compounding
rators, our result aboveand origin of frame ‘b’ iname ‘a’.
ans 0 v 0, ,( )I
1 0 0 0
0 0 1– 0
0 1 0 v
0 0 0 1
=
ja
b
1 0 0 0T
0 1 0 0T
0 0 1 0T
0 0 0 1T
zo Kelly January 12, 2005
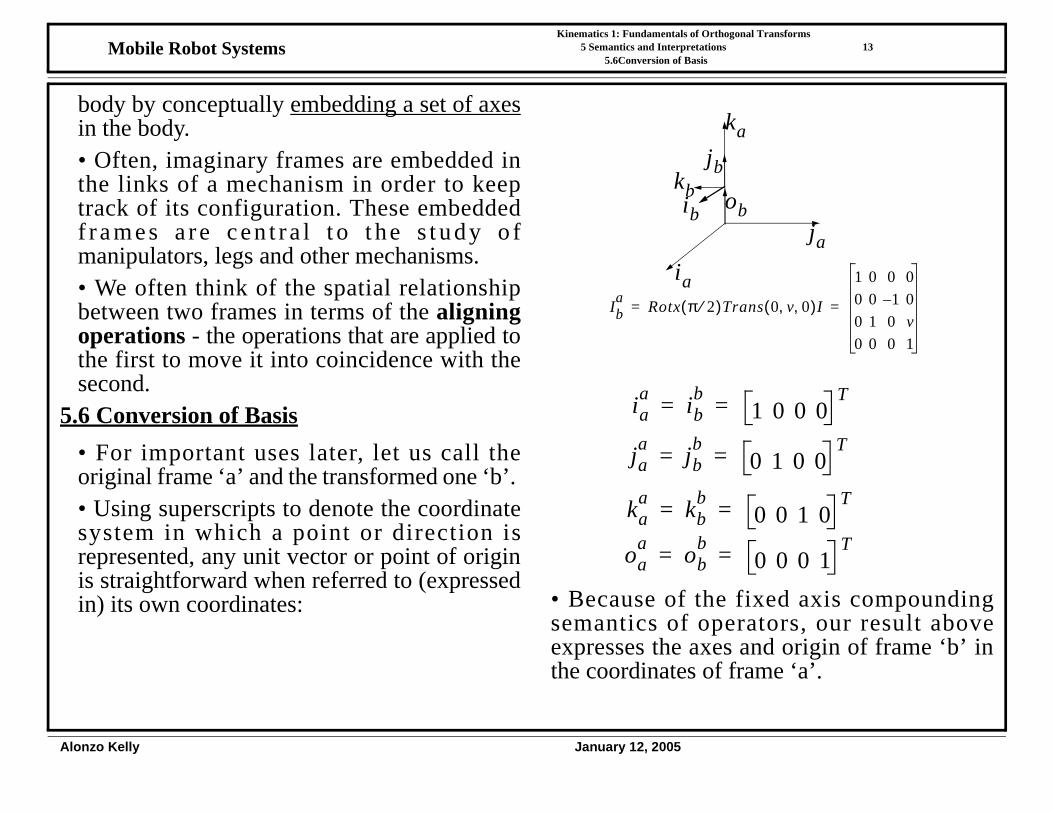
ystem in which a point or direction isepresented, any unit vector or point of origins straightforward when referred to (expressedn) its own coordinates: • Because of the f
semantics of opeexpresses the axes the coordinates of fr
a b
oaa
obb
= =
Mobile Robot Systems 5 Semantics and Interpretations5.6Conversion of Basis
ody by conceptually embedding a set of axesn the body. Often, imaginary frames are embedded inhe links of a mechanism in order to keeprack of its configuration. These embeddedra mes a r e c en t r a l t o t he s t udy o fanipulators, legs and other mechanisms.
We often think of the spatial relationshipetween two frames in terms of the aligningperations - the operations that are applied tohe first to move it into coincidence with theecond. Conversion of Basis
For important uses later, let us call theriginal frame ‘a’ and the transformed one ‘b’. Using superscripts to denote the coordinate
Iba
Rotx π 2⁄( )Tr=
ia
ib
jbkb
ka
o
iaa
ibb
= =
jaa
jbb
= =
ka
kb
= =
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms14
•‘
5.7
•p•ppptodt•i
its projections onto theses entity also embodies theCartesian) coordinate
of unit vectors is often frame or simply a frame.ansforms as Coordinate
us transforms (HTs)haveary interpretations:operator interpretation)d i r e c t i on s (o p e r a t o r
rient frames (operator
e relationship betweeninterpretation)ordinates of a basisother one: a device to
ates, and this will be ouror it.
zo Kelly January 12, 2005
osition and attitude available, it becomesossible to talk about the state of motion ofhe or ig in in terms of t ransla t ion andrientation and all of their associated timeerivatives. Therefore, this entity embodieshe properties of a frame of reference. With a set of three orthogonal unit vectors, its possible to represent an arbitrary vector
• represent thframes (frame • convert the co
• There is yet antransform coordinmost common use f
Mobile Robot Systems 5 Semantics and Interpretations5.7The Coordinate Frame
That is, converts the coordinates of frameb’s basis to that of frame ‘a’.
The Coordinate Frame
These 4 X 4 matrices have two importantroperties for the physicist: Cartesian coordinate systems encode both aosition and an attitude. With an encoded
Iba
iba
jba
kba
oba=
Iba
Iba
iba
jba
kba
oba Ib
b=
Iba
iba
jba
kba
oba=
quantity in terms ofaxes. Therefore, thiproperties of a (system. • This moving setcalled a coordinate
5.8 Homogeneous TrTransforms
• So far homogeneoseveral complement
• move points (• r e - o r i e n t interpretation)• move and ointerpretation)
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms15
as Coordinate Transforms
•ta(•a
nt be expressed in therame ‘b’. This will beerscript b.
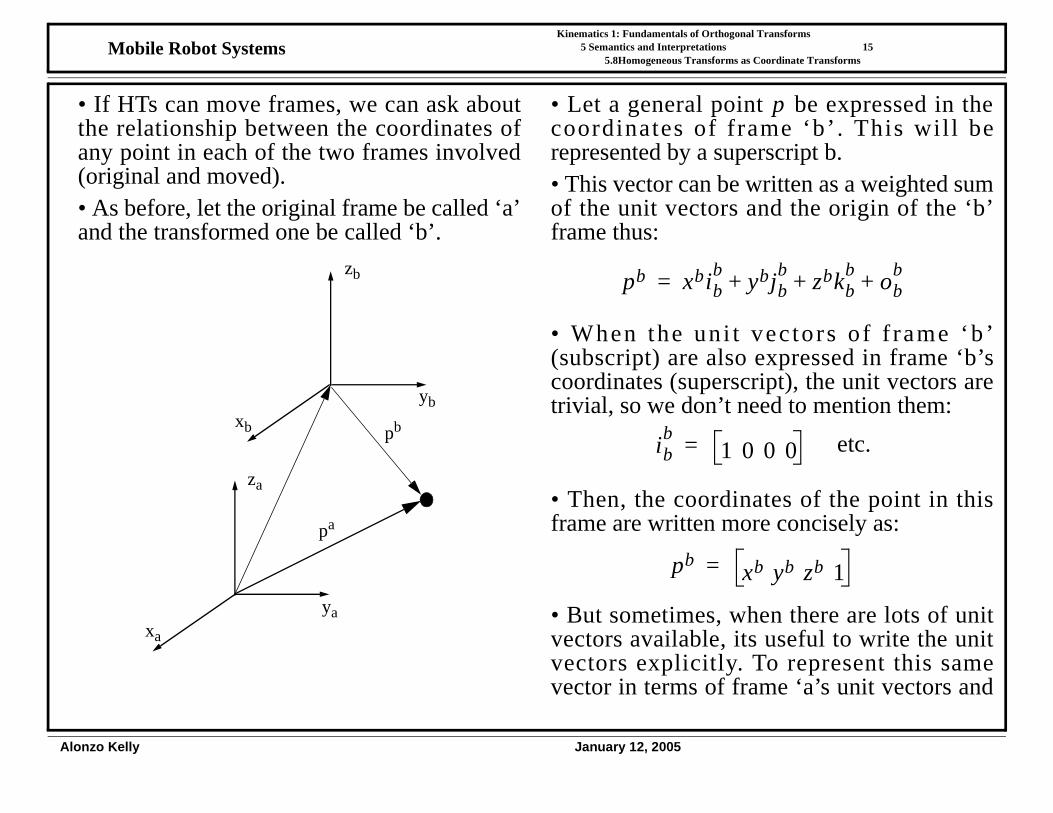
written as a weighted sum and the origin of the ‘b’
vec tors of f rame ‘b’ expressed in frame ‘b’s
cript), the unit vectors areneed to mention them:
nates of the point in thisore concisely as:
hen there are lots of unitts useful to write the unit. To represent this samerame ‘a’s unit vectors and
p
ybjbb
zbkbb
obb
+ +
0 0 0 etc.
xb yb zb 1
zo Kelly January 12, 2005
xa
ya
pa frame are written m
• But sometimes, wvectors available, ivectors explicitlyvector in terms of f
pb =
Mobile Robot Systems 5 Semantics and Interpretations5.8Homogeneous Transforms
If HTs can move frames, we can ask abouthe relationship between the coordinates ofny point in each of the two frames involvedoriginal and moved). As before, let the original frame be called ‘a’nd the transformed one be called ‘b’.
za
xb
yb
zb
pb
• Let a general poicoordinates of frepresented by a sup• This vector can beof the unit vectorsframe thus:
• When the uni t(subscript) are alsocoordinates (superstrivial, so we don’t
• Then, the coordi
pb xbibb
+=
ibb
1=
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms16
lity
ovc
Nvu•
•
•pmp
form Duality
ortant thing to rememberransforms:
us transform that movesncidence with frame ‘b’nverts the coordinates
s in the opposite directionframe ‘a’. he opposite sense in the tha t moving a po int
coo rd ina t e sys t em i sva lent to moving thebackward”. ransforms
w that the inverse of aqual to its transpose. Thisy of orthonormality. Thisnd set of 4 matrices, thesforms, which are theators and which therefore from ‘a’ to ‘b’. These areelow. Transforms will be
zo Kelly January 12, 2005
substituting from above, we now haveroven the capacity of the change of basisatrix to transform the coordinates of any
oint:
pa Ibap
b=
rotation matrix is eis called the propertfact leads to a secofundamental traninverses of the operconvert coordinatesgiven in the table b
Mobile Robot Systems 5 Semantics and Interpretations5.9Operator / Transform Dua
rigin, we need only transform the unitectors and origin of frame ‘b’ into frame ‘a’soordinates:
OTE: we have transformed only the unitectors and origin. The scalar weights arenchanged. This can be written as:
or more compactly as:
pa xbiba
ybjba
zbkba
oba
+ + +=
pa xbIbaib
bybIb
ajbb
zbIbakb
bIbaob
b+ + +=
pa Iba
xbibb
ybjbb
zbkbb
obb
+ + +( )=
5.9 Operator / Trans
This is the most impabout homogeneous t
• The homogeneoframe ‘a’ into coi(operator) also co(transform) of point- from frame ‘b’ to • The reason for tin te rpre ta t ion i s“ fo rward” i n a comple te ly equicoordinate system “
5.10 Fundamental T
• It is easy to sho
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms17
dn
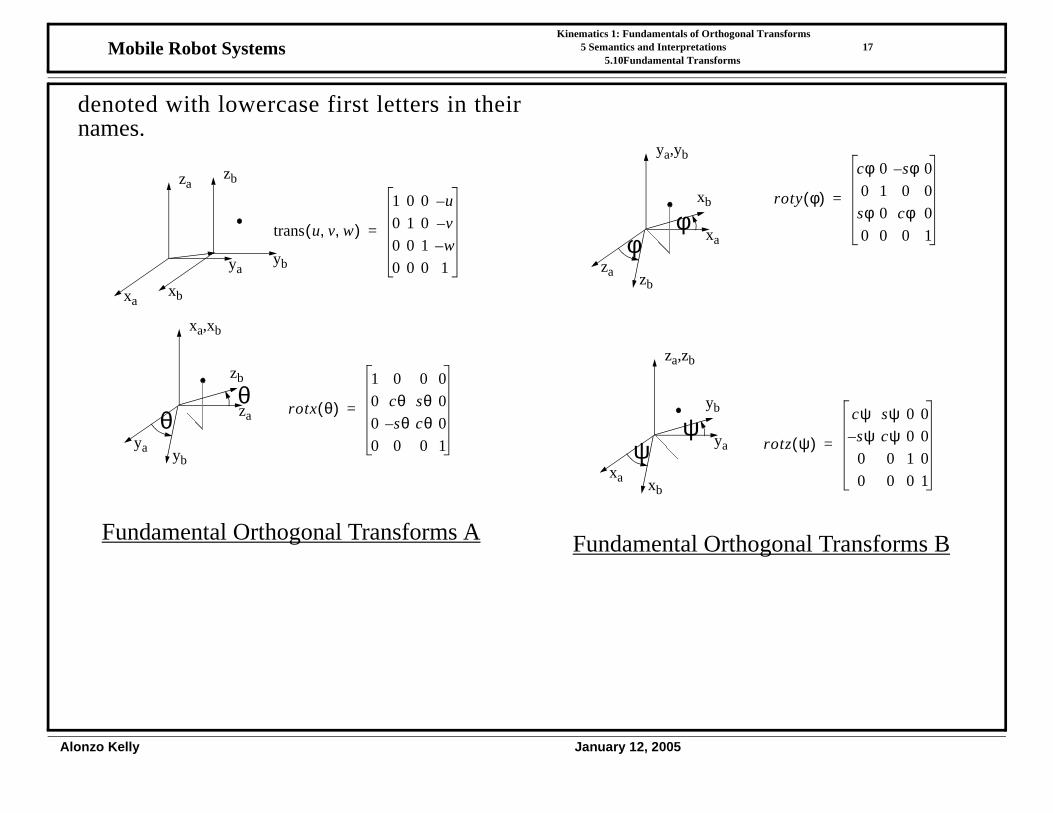
roty φ( )
cφ 0 s– φ 0
0 1 0 0
sφ 0 cφ 0
0 0 0 1
=
rotz ψ( )
cψ sψ 0 0s– ψ cψ 0 0
0 0 1 0
0 0 0 1
=
ogonal Transforms B
zo Kelly January 12, 2005
Fundamental Orthogonal Transforms A Fundamental Orth
Mobile Robot Systems 5 Semantics and Interpretations5.10Fundamental Transforms
enoted with lowercase first letters in theirames.
xa
ya
za
trans u v w, ,( )
1 0 0 u–
0 1 0 v–
0 0 1 w–
0 0 0 1
=
ya
za
xa,xb
θ
xb
yb
zb
yb
θzb
rotx θ( )
1 0 0 0
0 cθ sθ 0
0 s– θ cθ 0
0 0 0 1
=
za
xa
ya,yb
φzb
φxb
xa
ya
za,zb
ψxb
ψyb
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms18
the Coordinates of a Point
5.1
•
•tcau•faa•ttutc
o
0 v–, )rotx π– 2⁄( )o
v
1 0 0 0
0 0 1– 0
0 1 0 0
0 0 0 1
0
0
0
1
0
0
v
1
=
=
yav
a
The Coordinates
zo Kelly January 12, 2005
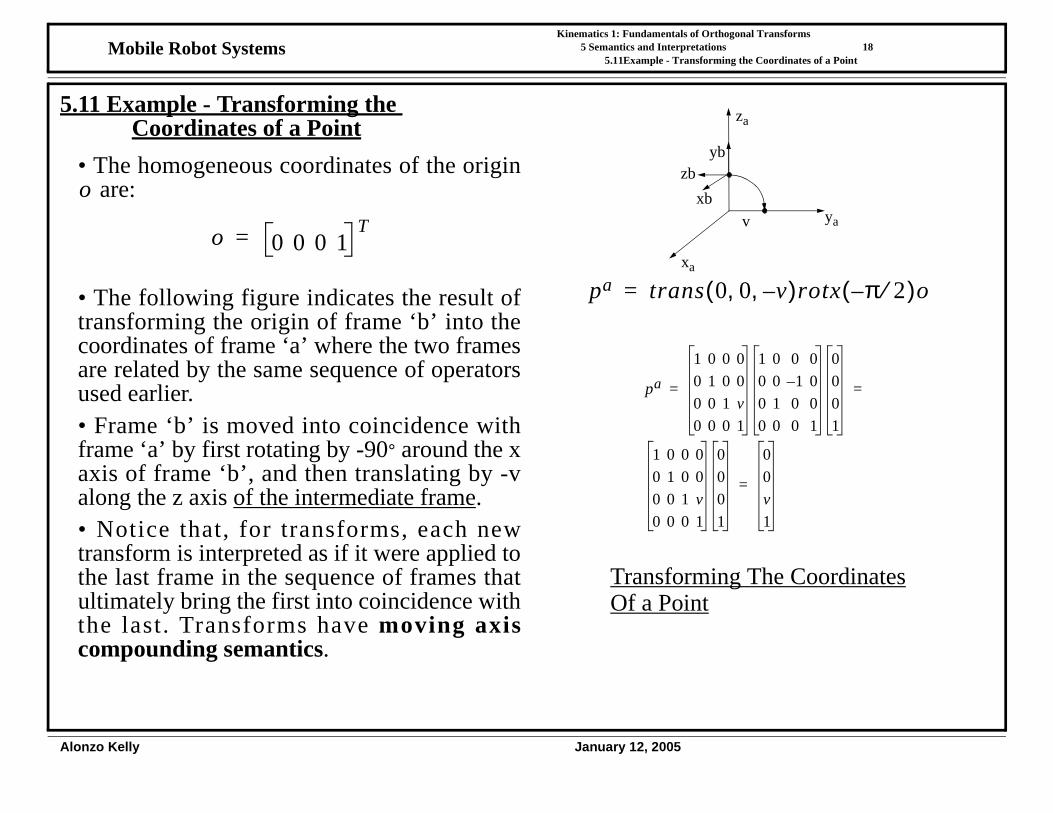
Notice that, for transforms, each newransform is interpreted as if it were applied tohe last frame in the sequence of frames thatltimately bring the first into coincidence withhe last. Transforms have moving axisompounding semantics.
0 0 0 1 1
TransformingOf a Point
Mobile Robot Systems 5 Semantics and Interpretations5.11Example - Transforming
1 Example - Transforming the Coordinates of a Point
The homogeneous coordinates of the origin are:
The following figure indicates the result ofransforming the origin of frame ‘b’ into theoordinates of frame ‘a’ where the two framesre related by the same sequence of operatorssed earlier. Frame ‘b’ is moved into coincidence withrame ‘a’ by first rotating by -90° around the xxis of frame ‘b’, and then translating by -vlong the z axis of the intermediate frame.
o 0 0 0 1T=
pa trans 0,(=
pa
1 0 0 0
0 1 0 0
0 0 1
0 0 0 1
1 0 0 0
0 1 0 0
0 0 1 v
0
0
0
=
xa
ybzb
xb
z

Alon
Kinematics 1: Fundamentals of Orthogonal Transforms19
s Transform
5.1
•uf
•twcti
•m
t converts coordinates inn1. t is trivial to reverse thee transform.rem
ransforms are inverses.ar matrix is considered tosform is a matter of taste.ortant implicat ion fore l l i ng th a t w i l l beample.
odel
example, the moving axish bring frame ‘a’ intome ‘b’ are:its along the z axisund the new x axis
f “from a to b” is “from b to a”.
zo Kelly January 12, 2005
This is very useful for converting from aatrix that converts coordinates in one
0
R
0 0 1
p
0
RT
0 0 1
-RTp=
-1 • translate v un• rotate 90° aro
1. The “opposite direction” o
Mobile Robot Systems 5 Semantics and Interpretations5.12Inverse of a Homogeneou
2 Inverse of a Homogeneous Transform
All homogeneous transforms that we willse will be structured according to the
ollowing template:
The scale factor will almost always be 1 andhe perspective part will be all zeros except
hen modelling cameras. Under theseonditions, it is easy to show by multiplyinghe inverse by the original matrix, that thenverse is:
Perspective Scale
RotationMatrix
Posi
tion
Vec
tor
direction to one thathe opposite directio• Remember that isense of a coordinat
5.13 A Duality Theo
• Operators and tWhether a particulbe operator or tranThis has an impk i ne ma t i c m oddemonstrated by ex
5.14 The Standard M
• Using the previousoperat ions whiccoincidence with fra
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms20
•cw
•mm
sform can be rewritten ins:
his matrix will convertame ‘b’ to frame ‘a’, andlier, also represents the of frame ‘b’ with respecthe well known method forroduct, this inverse matrix follows:
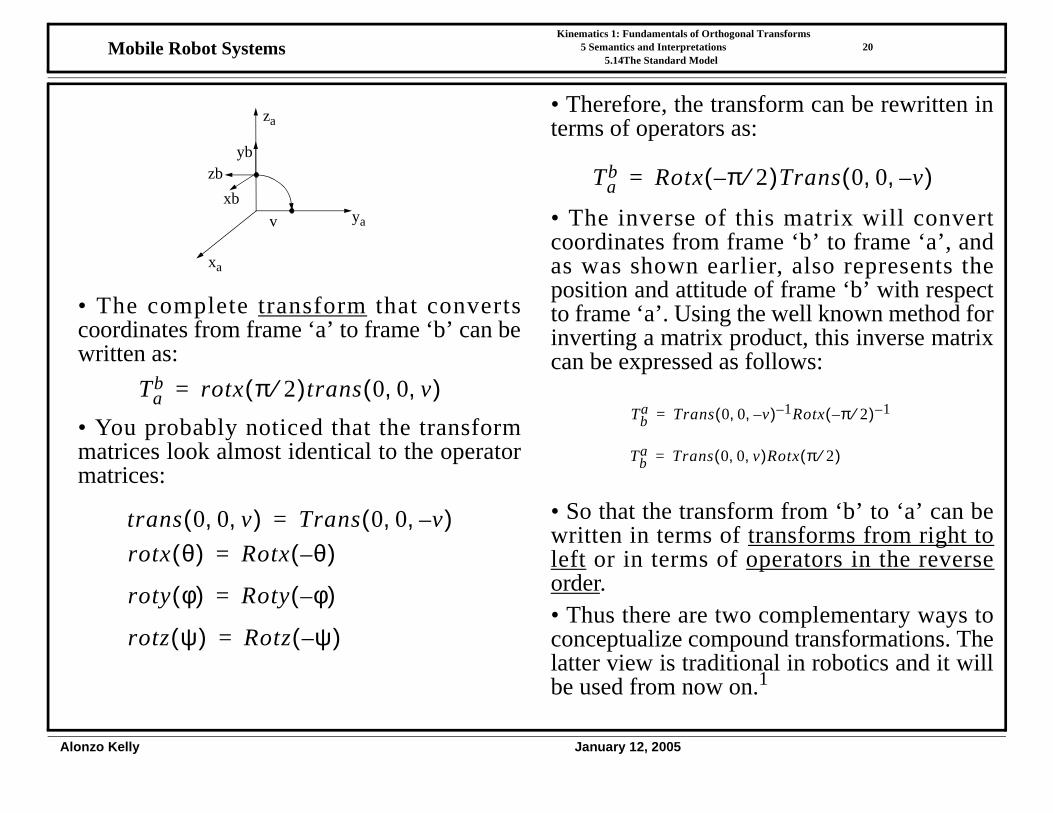
rm from ‘b’ to ‘a’ can be transforms from right to operators in the reverse
o complementary ways toound transformations. Theonal in robotics and it willn.1
2⁄ )Trans 0 0 v–, ,( )
0 v–, ) 1– Rotx π– 2⁄( ) 1–
v, )Rotx π 2⁄( )
zo Kelly January 12, 2005
trans 0 0 v, ,( ) Trans 0 0 v–, ,( )=
rotx θ( ) Rotx θ–( )=
roty φ( ) Roty φ–( )=
rotz ψ( ) Rotz ψ–( )=
written in terms ofleft or in terms oforder. • Thus there are twconceptualize complatter view is traditibe used from now o
Mobile Robot Systems 5 Semantics and Interpretations5.14The Standard Model
The complete transform that convertsoordinates from frame ‘a’ to frame ‘b’ can beritten as:
You probably noticed that the transformatrices look almost identical to the operatoratrices:
xa
ya
yb
v
zb
xb
za
Tab rotx π 2⁄( )trans 0 0 v, ,( )=
• Therefore, the tranterms of operators a
• The inverse of tcoordinates from fras was shown earposition and attitudeto frame ‘a’. Using tinverting a matrix pcan be expressed as
• So that the transfo
Tab Rotx π–(=
Tba Trans 0,(=
Tba Trans 0 0,(=
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms21
eneous Transforms
5.1
•
•
•cio
ona l t r ans fo rma t i one represented by a 4Dformation and the use ofrojective) coordinates.tion includes rotation and/ perserves the distancesce, it also preserves areas
gid.tion can be represented by special form, where the
umns are orthonormal, theals and a 1 and the rest ofos.r ix has the fo l lowing
nd or translates points andnd hence ro ta tes anddinate frames.s represent the unit vectorse result of operating on a
rame expressed in thethe original frame.
zo Kelly January 12, 2005
1. One implication of this is that any set of rotations about fixed axes is equivalent to the same set executed in the reverse order about moving axes.
• 1) It rotates ad i rec t ions atranslates coor• 2) Its columnand origin of thcoordinate fcoordinates of
Mobile Robot Systems 6 Summary5.15The Semantics of Homog
5 The Semantics of Homogeneous Transforms
Homogeneous transforms are• operators and transforms
and they can also be ...• the things that are operated on andtransformed.
If you have not noticed already, go back andonfirm that every one of the five examplenterpretations was a different interpretationf the same matrix.
6 Summary• The 3D o r thog(operation) can bhomogeneous transhomogeneous (i.e. p• Such a transformaor translation andbetween points. Henand angles and is ri• Such a transformaa 4 X 4 matrix of afirst 3 rows and colright column is 3 rethe elements are zer• Any such matproperties:
Alon
Kinematics 1: Fundamentals of Orthogonal Transforms22
eneous Transforms
•i•eraatf
tion to Robotics”
”
3D Computer graphics”
zo Kelly January 12, 2005
Mobile Robot Systems 7 References5.15The Semantics of Homog
• 3) It converts coordinates of points anddirections from the result to the originalframe.
Any product of orthogonal transformationss also orthogonal. Orthogonal transforms are one mathematicalxpression of rigid motion in 3D. Theyepresent the relationship between two sets ofxes. We can imagine that the first set movednd became the second, or that the second iso be expressed in terms of the axes of theirst.
7 ReferencesJohn Craig, “Introduc
Faugeras, “3D Vision
X, “Fundamentals of