que es kriging
TRANSCRIPT
Que es Kriging
Es una interpolacioacuten oacuteptima basada en la regresioacuten contra los valores z observados de los puntos de datos circundantes medidos de acuerdo al espacio de valores de covarianza
Que es interpolacioacuten
Es la estimacioacuten de una variable en una ubicacioacuten no medida de valores observados en locaciones circundantes
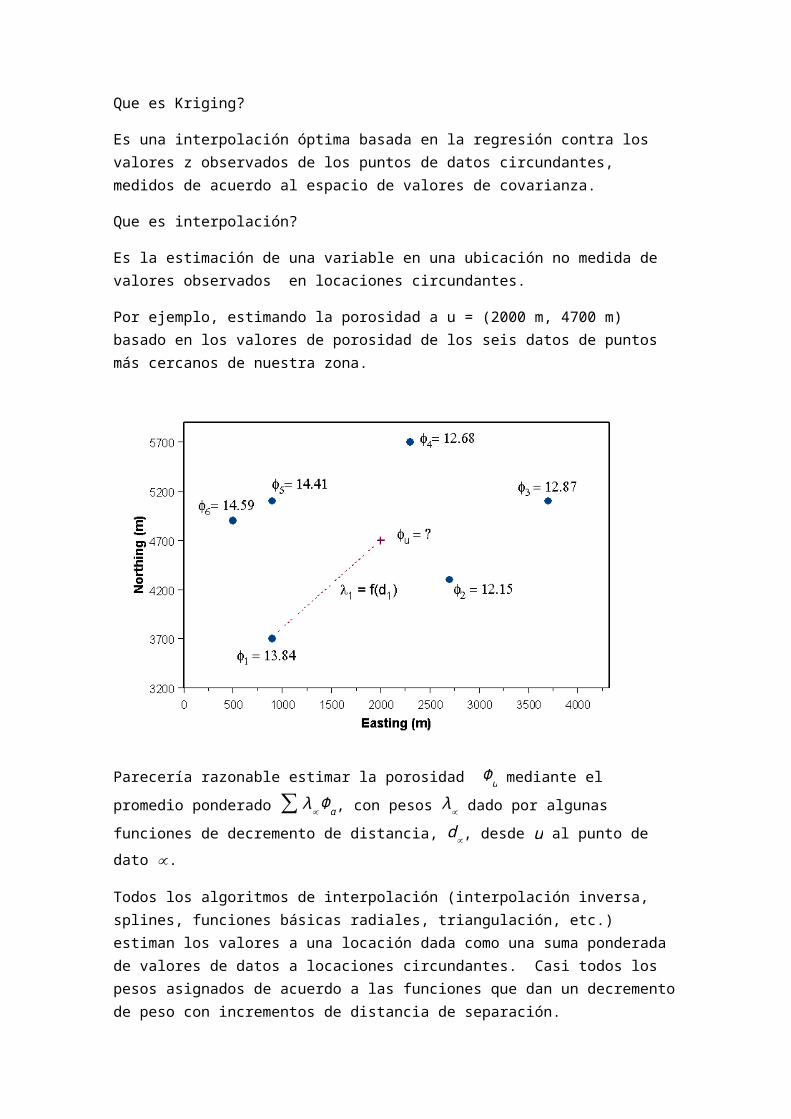
Por ejemplo estimando la porosidad a u = (2000 m 4700 m) basado en los valores de porosidad de los seis datos de puntos maacutes cercanos de nuestra zona
Pareceriacutea razonable estimar la porosidad Φu mediante el promedio ponderado sum λpropΦα con
pesos λprop dado por algunas funciones de decremento de distancia dprop desde u al punto de dato prop
Todos los algoritmos de interpolacioacuten (interpolacioacuten inversa splines funciones baacutesicas radiales triangulacioacuten etc) estiman los valores a una locacioacuten dada como una suma ponderada de valores de datos a locaciones circundantes Casi todos los pesos asignados de acuerdo a las funciones que dan un decremento de peso con incrementos de distancia de separacioacuten
El Kriging asigna pesos de acuerdo a una funcioacuten medida de datos manejados (moderadamente) en vez de una arbitraria funcioacuten pero es solo un algoritmo de interpolacioacuten que brindaraacute resultados muy similares a otros en muchos casos (Isaak and Srivastava 1989) En particular
- Si la locacioacuten de los datos son bastante densos y uniformemente distribuidos a traveacutes del aacuterea de estudio se obtendraacuten estimados muy buenos a pesar de los algoritmos de interpolacioacuten
- Si la locacioacuten de los datos cae en pocas agrupaciones con largos espaciamientos entre ellos puede conseguir estimaciones independientes poco confiables de algoritmos de interpolacioacuten
Algunas ventajas del Kriging
- Ayuda a compensar los efectos de la agrupacioacuten de datos asignando puntos individuales dentro del grupo de menos peso que los puntos de datos aislados (o tratar grupos maacutes similar a los puntos simples)
- Determina un error de estimacioacuten (varianza de Kriging) en conjunto con la estimacioacuten de la variable Z consigo mismo (pero el mapa de error es baacutesicamente una versioacuten escalda de un mapa de distancia al punto mas cercano de datos asiacute que no es uacutenico)
- Disponibilidad de la estimacioacuten de error proporciona bases para simulacioacuten estocaacutestica de las realizaciones posibles de Z(u)
ENFOQUE Y TERMINOLOGIA KRIGING
Goovaerts 1997 ldquoTodos los estimadores Kriging no son maacutes que variantes del estimador baacutesico de regresioacuten lineal Z(u) definido como
Con
u uα Vectores de localizacioacuten para puntos de estimacioacuten y uno de los datos de los puntos vecinos indexado por α
n(u) Nuacutemero de puntos de datos en la vecindad local usado para la estimacioacuten de Z(u)
m(u) m(uα) Valores esperados (promedios) de Z (u) y Z (uα)
λprop(u) Peso de Kriging asignado al dato z (uα ) para la estimacioacuten de la locacioacuten u mismo dato que recibiraacute diferente peso para la estimacioacuten de locacioacuten diferente
Z (u) es tratado como un campo aleatorio con un componente tendiente m(u) y un componente residual R (u )=Z (u )minusm(u) El Kriging estima el residual en u como la suma
ponderada de residuales en puntos de datos circundantes Los pesos Kriging λprop son derivados a partir de la funcioacuten de covarianza o semivariograma el cual deberiacutea caracterizar el componente residual La distincioacuten entre tendencia y residual algo arbitrario variacutea con la escala
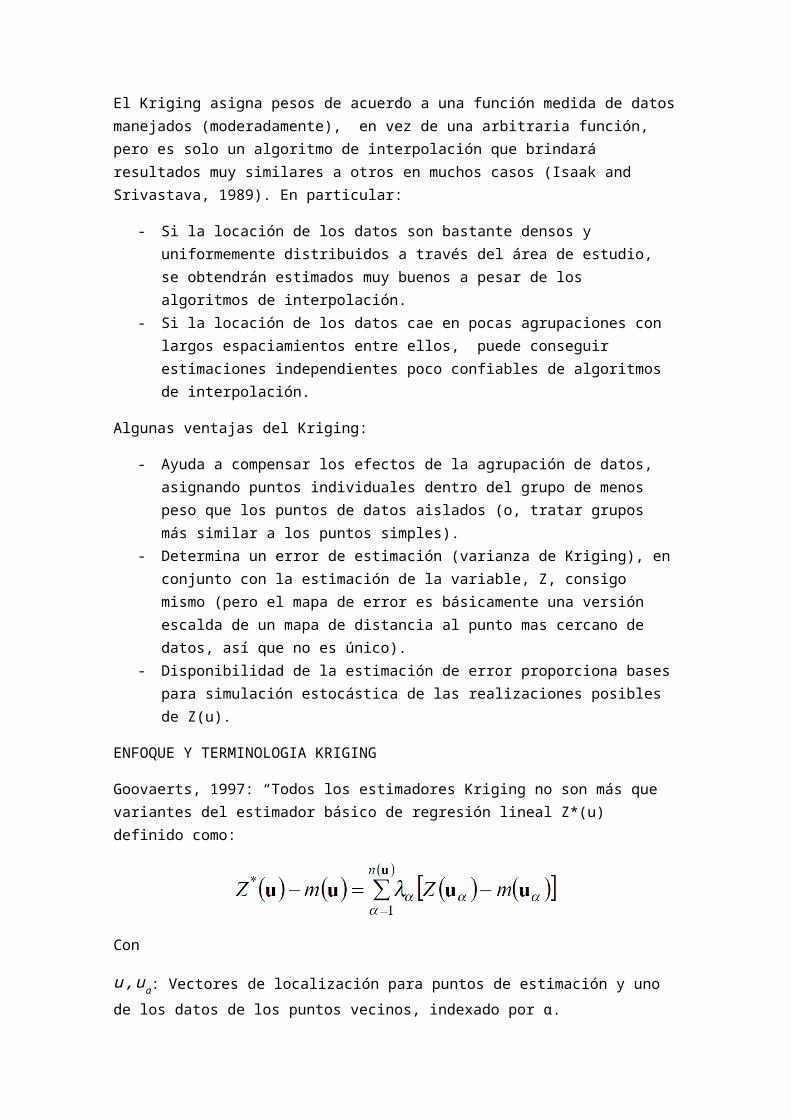
La regioacuten de los seis puntos del ejemplo anterior
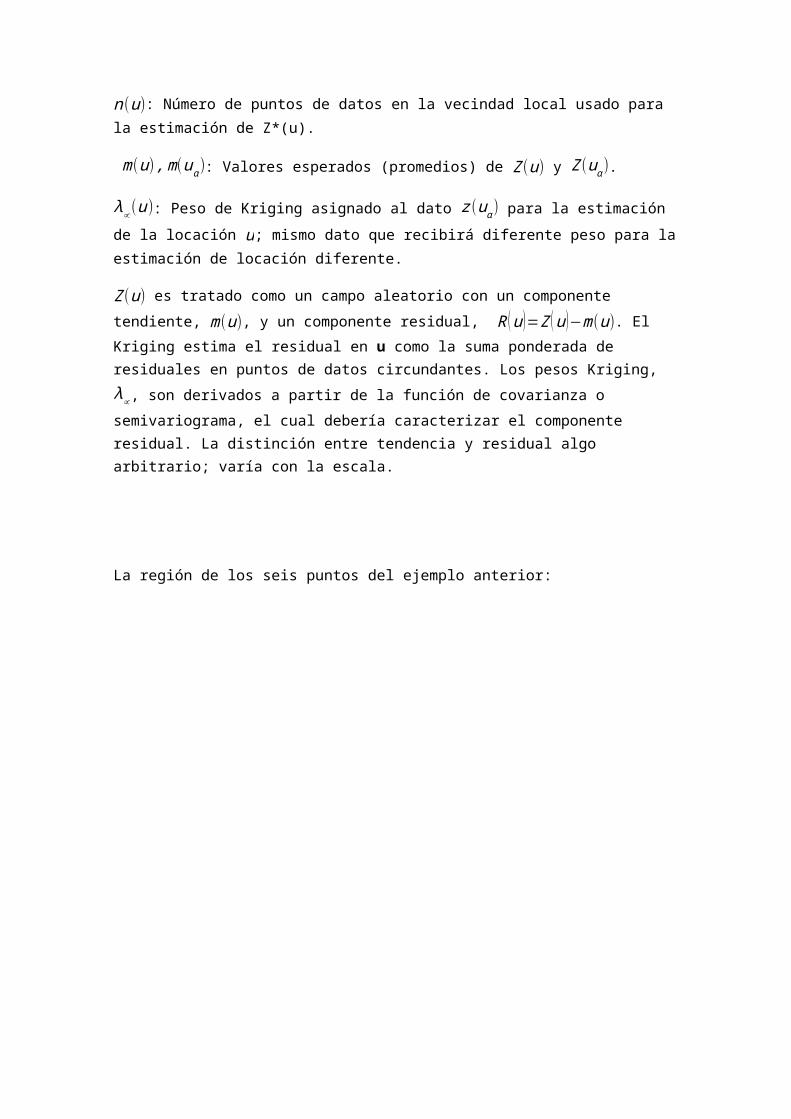
FUNDAMENTOS DE KRIGING
La forma baacutesica del estimador Kriging es
El objetivo es determinar pesos λprop lo cual minimiza la varianza del estimador
Bajo la restriccioacuten insesgada
El campo aleatorio (RF) Z (u) es descompuesto dentro de componentes de tendencia y residual Z (u )=R (u )+m(u) con el componente residual tratado como un campo aleatorio con un promedio estacionario de 0 y una covarianza estacionaria (una funcioacuten de retardo h pero no de posicioacuten u)
La funcioacuten de covarianza residual es generalmente derivado del la entrada del modelo
semivariograma
Por lo tanto el semivariograma alimentamos al programa Kriging que debe representar el componente residual de la variable
Los tres principales variantes de Kriging Simple Ordinario y Kriging con una tendencia difiere en sus tratamientos de componente de tendencia m(u)
SIMPLE KRIGING
Para kriging simple asumimos que la tendencia del componente es un promedio constante y conocido m (u )=m de modo que
Este estimado es automaacuteticamente insesgado desde que de modo que
El error de estimacioacuten es una combinacioacuten lineal de variables aleatorias representando residuales en los puntos de datos uα y el punto de estimacioacuten u
Usando reglas para la varianza de una combinacioacuten lineal de variables aleatorias la varianza de error es luego dado por
Para minimizar la varianza de error tomaremos la derivada de la expresioacuten anterior con respecto a cada peso de kriging y se pone cada derivada a cero Esto induce al siguiente sistema de ecuaciones
Debido a que el promedio es constante la funcioacuten de covarianza para Z (u ) es el mismo que
para el componente residual C (h )=CR(h) de modo que podemos escribir el sistema de
kriging simple directamente en teacuterminos de C (h )
Esto puede ser escrito en forma de matriz como
Donde KSK es la matriz de covarianza entre los puntos de datos con elementos
K i j=C (uiminusu j) k es el vector de covarianza entre los puntos de datos y el punto de
estimacioacuten con elementos dados por k i=C(uiminusu) y λSK (u) es el vector de pesos de simple kriging para los puntos de datos circundantes Si el modelo de covarianza es licito (es decir el modelo semivariograma subyacentes es liacutecito) y no hay dos puntos de datos que sean colocalizadas luego la matriz de covarianza de datos es definida positiva y podemos resolver para los pesos de kriging usando
λSK=Kminus1k
Una vez que tenemos los pesos de kriging podemos calcular la estimacioacuten kriging y la varianza de kriging el cual es dado por
Despueacutes substituyendo los pesos de kriging dentro de la expresioacuten de varianza de error anterior
iquestQueacute hace toda esta matemaacutetica
Esto encuentra un set de pesos para estimar el valor de variabilidad en la locacioacuten de valores en un set de puntos de datos vecinos El peso en cada punto de datos generalmente decrece con el incremento de la distancia a ese punto en concordancia con las decrecientes covariazas de datos de estimacioacuten especificado en la mano derecha del vector k Sin embargo el set de pesos es tambieacuten disentildeado para tener en cuenta la redundancia entre los puntos de datos representados en las covarianzas de punto de datos ldquopunto a datordquo en la matris K Multiplicando k por K-1 (en la izquierda) disminuiraacute los pesos de los puntos cayendo en relativos grupos a puntos aislados a la misma distancia
Aplicaremos Kriging simple a nuestros datos de porosidad usando el variograma esfeacuterico que ajustamos anteriormente con cero ldquonuggetrdquo un ldquosillrdquo de 078 y un rango de 4141m
Ya que estamos usando un semivariograma esfeacuterico la funcioacuten de covarianza es dado por
Para distancias de separacioacuten h arriba de 4141m y 0 maacutes allaacute de ese rango El graacutefico de abajo muestra los elementos de la mano derechas del vector
k=[038 056 032 049 046 037 ]T obtenido de conectar las distancias del dato a punto
de estimacioacuten dentro de esta funcioacuten de covarianza
La matriz de distancias entre pares de puntos de datos (redondeando al metro maacutes cercano) es dado por
Esto se traslada dentro de una matriz de covarianza de datos
(redondeado a lugares de 2 decimales) Note en particular la correlacioacuten relativamente alta entre los puntos 5 y 6 separado por 447m El vector resultante de los pesos de kriging es
Observe que el punto 6 es asignado a muy pequentildeos pesos relativo al punto 1 de datos aunque ambos estaacuten a la misma distancia desde el punto de estimacioacuten y tienen aproximadamente la misma covarianza de puntos de datos para la estimacioacuten de puntos (k 1=038 k6=037) Esto es por que el punto 6 de datos es efectivamente ldquoscreenedrdquo por el e cercano punto 5 de datos
Los puntos de datos 5 y 6 bastante estrechamente correlacionada con cualquiera y 5 tiene mas fuerte correlacion con el punto estimado vemos que el punto 6 de datos es efectivamente ignorado Tenga en cuenta que las covarianzas y por lo tanto los pesos kriging son determinados enteramente por la configuracioacuten de los datos y el modelo de covarianza no los valores actuales de los datos
Las porosidades en los puntos 5 y 6 podriacutean de hecho ser muy diferentes y este no tendriacutea influencia en los pesos de kriging
El valor de porosidad promedio para 85 pozos es 1470 y los valores de porosidad en los seis pozos del ejemplo son 1384 1215 1287 1268 1441 y 1459 El residual estimado del promedio en u es dado por el producto escalar de los pesos de kriging y los vectores residuales en los puntos de datos
Antildeadiendo el promedio de nuevo dentro de este residual estimada nos da una porosidad
estimada de
Similarmente conectando los pesos de kriging y el vector k dentro de la expresioacuten para la varianza de estimacioacuten nos da una varianza de 0238 (cuadrado del porcentaje) Dado estas dos piezas de informacioacuten podemos representar la porosidad en u = (2000m 4700m) como una distribucioacuten normal con un promedio de 1283 y una variacioacuten estaacutendar de 049 Noacutetese que al igual que los pesos de kriging el estimado de la varianza depende enteramente de la configuracioacuten de los datos y la funcioacuten de covarianza no en los valores de siacute mismos La varianza de estimacioacuten Kriging seriacutea el mismo a pesar de si los valores de porosidad actual en la vecindad fueron muy similares o altamente variable La influencia de los valores de los datos a traveacutes de la adecuacioacuten del modelo de semivariograma es muy indirecta
Aquiacute tenemos los estimados del simple kriging y la desviacioacuten estaacutendar en rejillas 100x80 con 100 metros de espaciamiento usando el modelo de semivariograma esfeacuterico y estimando cada valor de celda de 16 puntos maacutes cercanos de datos vecinos (locaciones de pozos)
Kriging Ordinario
Para el Kriging ordinario en lugar de asumir que la media es constante en todo el dominio se supone que es constante en el vecindario local de cada punto de la estimacioacuten que es m(u)=m(u) para cada valor de los datos en las inmediacionesZ (uα) que usamos para estimar Z(u) En este caso el estimador Kriging puede ser escrito
y filtramos la media local desconocida al exigir que los pesos kriging sumen 1 dando lugar a un estimador kriging ordinario de
Zok(u)=sumα=1
n (u )
λαOK (u )Z (uα )
con
sumα=1
n (u)
λαOK (u )=1
Con el fin de minimizar la varianza del error sujeto a la restriccioacuten de la unidad de suma en los pesos que en realidad instalamos el sistema para que minimice el error de la varianza maacutes un teacutermino adicional que implica un paraacutemetro de Lagrange μOK (u)
L=σE2 (u )+μOK (u )[1minussum
α=1
n (u)
λα (u )]Asiacute la minimizacioacuten con respecto a las fuerzas del paraacutemetro de Lagrange la restriccioacuten seraacute
12partLpart μ
=1minussumα=1
n (u )
λα (u )=0
En este caso el sistema de ecuaciones para los pesos resulta ser
sumβ=1
n (u)
λβOK (u )CR (uαminusuβ )+μOK (u )=C R (uαminusu )
α=1 helliphellip n (u )
sumβ=1
n (u)
λβOK (u )=1
Donde CR (h ) es una vez maacutes la funcioacuten de covarianza para el componente residual de la
variable En Kriging simple podriacutease igualar CR (h ) y C (h ) la funcioacuten de covarianza para la
variable en si debido a la suposicioacuten de un promedio constante Esta cualidad no es fundamentada pero en la praacutectica la sustitucioacuten es generalmente hecho de todos modos en la suposicioacuten que el semivariograma a partir del cual C(h) es derivado efectivamente filtra la influencia de las tendencias de gran escala en la media
De hecho la restriccioacuten de la unidad de suma en los pesos permite el sistema kriging ordinario para ser declarado directamente en teacuterminos del semivariograma (en lugar de los valores CR (h ) de arriba) En este sentido el kriging ordinario es enfoque de interpolacioacuten que sigue naturalmente a partir de un anaacutelisis de semivariograma ya que ambas herramientas tienden a filtrar las tendencias en la media
Una vez que los pesos kriging (y el paraacutemetro de Lagrange) son obtenidos el error de varianza del kriging ordinario es dado por
En los teacuterminos de matriz el sistema de kriging ordinario es una versioacuten aumentada del sistema kriging simple Para nuestro ejemplo de seis puntos seriacutea
Cuya solucioacuten es
La estimacioacuten kriging ordinario en u =(2000 m4700m)resulta ser 1293 con una desviacioacuten estaacutendar de 0490 ligeramente diferentes de los valores de kriging simple de 1283 y 0488
Otra vez usando 16 vecinos maacutes cercanos para cada punto de estimacioacuten la estimacioacuten de porosidad por el kriging ordinario y la desviacioacuten estaacutendar se parecen mucho a las de kriging simple
Kriging con tendencia
El kriging con tendencia (el meacutetodo formalmente como kriging universal) es maacutes parecido al kriging ordinario excepto que en lugar de adecuar justo un promedio local en la vecindad de estimacioacuten de puntos adecuamos una tendencia lineal o de mayor orden en las cordenadas (xy) de los puntos de datos Un modelo de tendencia lineal local (por ejemplo de primer orden) seria dado por
Incluyendo el modelo en el sistema de kriging involucra el mismo tipo de estencion como usamos para el kriging ordinario con la adicioacuten con dos o maacutes paraacutemetros Lagrange y dos
columnas y filas extras en la matriz K de quien sus elementos (ninguno cero) estaacuten en las cordenadas x y y de los puntos de datos Tendencias de alto orden (cuadraacutetica cubica) podriacutea ser manejado de la misma forma pero en la praacutectica esto se raro usar cualquier funcioacuten de tendencia de alto orden que la tendencia de primer orden Kriging Ordinario es kriking con un modelo de tendencia de orden cero
Si la variable de intereacutes exhibe una tendencia significante una aproximacioacuten tiacutepica seriacutea intentar estimar un ldquode-tendenterdquo semivariograma usando uno de los meacutetodos descritos en la lectura de los semivariograma y luego alimentar esto dentro de kriging con una tendencia de primer orden Sin embargo Goovaerts (1997) advierte contra este enfoque y en su lugar recomienda presentar el kriging simple de los residuales de una tendencia global (con un promedio constante de 0) y luego antildeadiendo de nuevo los residuales kriging dentro de la tendencia global
Sea el campo aleatorio Z(s) s isin D sub Rd donde se ha observado el atributo Z en las ubicaciones n s s s 1 2 1048610 y se desear predecir dicho atributo en una ubicacioacuten no observada basaacutendose en los valores obtenidos en las muestras hechas Las teacutecnicas de prediccioacuten espacial son modalidades de una familia de meacutetodos llamada Kriging El nombre se debe al Ingeniero minero DG Krige quien desarrolloacute en la deacutecada de los 50 meacutetodos empiacutericos para predecir caracteriacutesticas de una mina en alguna ubicacioacuten de intereacutes donde no se conociacutean datos usando las caracteriacutesticas conocidas en lugares cercanos donde si habiacutean sido tomados Su meacutetodo original es conocido como Kriging ordinario
El Kriging aparece en muchas formas de acuerdo a si se conocen la media la distribucioacuten de probabilidad de Z(s) si las predicciones son hechas para puntos o aacutereas y asiacute sucesivamente
Sin embargo es importante recordar que el Kriging no es el uacutenico meacutetodo de prediccioacuten espacial existen meacutetodos determiniacutesticos como distancia inversa interpolacioacuten polinomial global interpolacioacuten polinomial local triangulacioacuten lineal funciones de base radial entre otros La ventaja del kriging sobre los meacutetodos determiniacutesticos es la estimacioacuten de la varianza del error de prediccioacuten lo cual permite ademaacutes estimar intervalos de confianza para dicha prediccioacuten ademaacutes de que el kriging es un meacutetodo de estimacioacuten que da el mejor estimador lineal insesgado (cuando se cumplen todos los supuestos) Inicialmente el kriging fue desarrollado para aquellos casos donde hay presencia de estacionariedad y posteriormente fue extendido para casos donde se cumple la hipoacutetesis intriacutenseca
Generalidades sobre el kriging
La toma de muestras da la informacioacuten de lo que ocurre en cada punto Sin embargo no da informacioacuten acerca de la relacioacuten que pueda existir entre dichos puntos Se requiere de una forma precisa de estimar valores en puntos intermedios o en el caso de bloques por ejemplo estimar el promedio sobre el bloque La precisioacuten del estimador usado depende de varios factores
El nuacutemero de muestras tomadas La calidad de la medicioacuten en cada punto Las ubicaciones de las muestras en la zona si las muestras son igualmente espaciadas
se alcanza una mejor cobertura dando mayor informacioacuten acerca de la zona que aquella que se obtendriacutea de muestras muy agrupadas en unos sectores y separadas en otros Sin embargo en la praacutectica debido a las caracteriacutesticas de las regiones de estudio muchas veces es preciso tomar muestras irregularmente espaciadas
Las distancias entre las muestras para la prediccioacuten es maacutes confiable usar muestras vecinas que muestras distantes esto es la precisioacuten mejora cuando la cercaniacutea de las muestras aumenta y se deteriora cuando esta disminuye La extrapolacioacuten no es aconsejable
La continuidad espacial de la variable o atributo en estudio es maacutes faacutecil estimar el valor de una variable bastante regular en una regioacuten que una que presenta grandes fluctuaciones
Introduccioacuten a la teoriacutea del kriging
Supongamos que se tienen las mediciones Z(s1) Z(s2) Z(s3) y Z(s4) en los puntos s1 s2 s3 y s4 respectivamente y se requiere predecir el valor Z(s0) El valor a predecir se ubica mas cerca de s2 que de cualquier otra ubicacioacuten donde se tenga medicioacuten por lo tanto es loacutegico pensar que Z(s0) es mas parecido a Z(s2) que a cualquiera de los otros tres valores medidos De acuerdo a lo anterior se puede optar para la prediccioacuten por una media ponderada de las cuatro mediciones en la cual Z(s2) tiene mayor peso que cualquier otra seguida en su orden por Z(s4) Z(s3) y por uacuteltimo Z(s1)
Donde z(u) es el mejor predictor lineal de kriging
- Si la locacioacuten de los datos son bastante densos y uniformemente distribuidos a traveacutes del aacuterea de estudio se obtendraacuten estimados muy buenos a pesar de los algoritmos de interpolacioacuten
- Si la locacioacuten de los datos cae en pocas agrupaciones con largos espaciamientos entre ellos puede conseguir estimaciones independientes poco confiables de algoritmos de interpolacioacuten
Algunas ventajas del Kriging
- Ayuda a compensar los efectos de la agrupacioacuten de datos asignando puntos individuales dentro del grupo de menos peso que los puntos de datos aislados (o tratar grupos maacutes similar a los puntos simples)
- Determina un error de estimacioacuten (varianza de Kriging) en conjunto con la estimacioacuten de la variable Z consigo mismo (pero el mapa de error es baacutesicamente una versioacuten escalda de un mapa de distancia al punto mas cercano de datos asiacute que no es uacutenico)
- Disponibilidad de la estimacioacuten de error proporciona bases para simulacioacuten estocaacutestica de las realizaciones posibles de Z(u)
ENFOQUE Y TERMINOLOGIA KRIGING
Goovaerts 1997 ldquoTodos los estimadores Kriging no son maacutes que variantes del estimador baacutesico de regresioacuten lineal Z(u) definido como
Con
u uα Vectores de localizacioacuten para puntos de estimacioacuten y uno de los datos de los puntos vecinos indexado por α
n(u) Nuacutemero de puntos de datos en la vecindad local usado para la estimacioacuten de Z(u)
m(u) m(uα) Valores esperados (promedios) de Z (u) y Z (uα)
λprop(u) Peso de Kriging asignado al dato z (uα ) para la estimacioacuten de la locacioacuten u mismo dato que recibiraacute diferente peso para la estimacioacuten de locacioacuten diferente
Z (u) es tratado como un campo aleatorio con un componente tendiente m(u) y un componente residual R (u )=Z (u )minusm(u) El Kriging estima el residual en u como la suma
ponderada de residuales en puntos de datos circundantes Los pesos Kriging λprop son derivados a partir de la funcioacuten de covarianza o semivariograma el cual deberiacutea caracterizar el componente residual La distincioacuten entre tendencia y residual algo arbitrario variacutea con la escala
La regioacuten de los seis puntos del ejemplo anterior
FUNDAMENTOS DE KRIGING
La forma baacutesica del estimador Kriging es
El objetivo es determinar pesos λprop lo cual minimiza la varianza del estimador
Bajo la restriccioacuten insesgada
El campo aleatorio (RF) Z (u) es descompuesto dentro de componentes de tendencia y residual Z (u )=R (u )+m(u) con el componente residual tratado como un campo aleatorio con un promedio estacionario de 0 y una covarianza estacionaria (una funcioacuten de retardo h pero no de posicioacuten u)
La funcioacuten de covarianza residual es generalmente derivado del la entrada del modelo
semivariograma
Por lo tanto el semivariograma alimentamos al programa Kriging que debe representar el componente residual de la variable
Los tres principales variantes de Kriging Simple Ordinario y Kriging con una tendencia difiere en sus tratamientos de componente de tendencia m(u)
SIMPLE KRIGING
Para kriging simple asumimos que la tendencia del componente es un promedio constante y conocido m (u )=m de modo que
Este estimado es automaacuteticamente insesgado desde que de modo que
El error de estimacioacuten es una combinacioacuten lineal de variables aleatorias representando residuales en los puntos de datos uα y el punto de estimacioacuten u
Usando reglas para la varianza de una combinacioacuten lineal de variables aleatorias la varianza de error es luego dado por
Para minimizar la varianza de error tomaremos la derivada de la expresioacuten anterior con respecto a cada peso de kriging y se pone cada derivada a cero Esto induce al siguiente sistema de ecuaciones
Debido a que el promedio es constante la funcioacuten de covarianza para Z (u ) es el mismo que
para el componente residual C (h )=CR(h) de modo que podemos escribir el sistema de
kriging simple directamente en teacuterminos de C (h )
Esto puede ser escrito en forma de matriz como
Donde KSK es la matriz de covarianza entre los puntos de datos con elementos
K i j=C (uiminusu j) k es el vector de covarianza entre los puntos de datos y el punto de
estimacioacuten con elementos dados por k i=C(uiminusu) y λSK (u) es el vector de pesos de simple kriging para los puntos de datos circundantes Si el modelo de covarianza es licito (es decir el modelo semivariograma subyacentes es liacutecito) y no hay dos puntos de datos que sean colocalizadas luego la matriz de covarianza de datos es definida positiva y podemos resolver para los pesos de kriging usando
λSK=Kminus1k
Una vez que tenemos los pesos de kriging podemos calcular la estimacioacuten kriging y la varianza de kriging el cual es dado por
Despueacutes substituyendo los pesos de kriging dentro de la expresioacuten de varianza de error anterior
iquestQueacute hace toda esta matemaacutetica
Esto encuentra un set de pesos para estimar el valor de variabilidad en la locacioacuten de valores en un set de puntos de datos vecinos El peso en cada punto de datos generalmente decrece con el incremento de la distancia a ese punto en concordancia con las decrecientes covariazas de datos de estimacioacuten especificado en la mano derecha del vector k Sin embargo el set de pesos es tambieacuten disentildeado para tener en cuenta la redundancia entre los puntos de datos representados en las covarianzas de punto de datos ldquopunto a datordquo en la matris K Multiplicando k por K-1 (en la izquierda) disminuiraacute los pesos de los puntos cayendo en relativos grupos a puntos aislados a la misma distancia
Aplicaremos Kriging simple a nuestros datos de porosidad usando el variograma esfeacuterico que ajustamos anteriormente con cero ldquonuggetrdquo un ldquosillrdquo de 078 y un rango de 4141m
Ya que estamos usando un semivariograma esfeacuterico la funcioacuten de covarianza es dado por
Para distancias de separacioacuten h arriba de 4141m y 0 maacutes allaacute de ese rango El graacutefico de abajo muestra los elementos de la mano derechas del vector
k=[038 056 032 049 046 037 ]T obtenido de conectar las distancias del dato a punto
de estimacioacuten dentro de esta funcioacuten de covarianza
La matriz de distancias entre pares de puntos de datos (redondeando al metro maacutes cercano) es dado por
Esto se traslada dentro de una matriz de covarianza de datos
(redondeado a lugares de 2 decimales) Note en particular la correlacioacuten relativamente alta entre los puntos 5 y 6 separado por 447m El vector resultante de los pesos de kriging es
Observe que el punto 6 es asignado a muy pequentildeos pesos relativo al punto 1 de datos aunque ambos estaacuten a la misma distancia desde el punto de estimacioacuten y tienen aproximadamente la misma covarianza de puntos de datos para la estimacioacuten de puntos (k 1=038 k6=037) Esto es por que el punto 6 de datos es efectivamente ldquoscreenedrdquo por el e cercano punto 5 de datos
Los puntos de datos 5 y 6 bastante estrechamente correlacionada con cualquiera y 5 tiene mas fuerte correlacion con el punto estimado vemos que el punto 6 de datos es efectivamente ignorado Tenga en cuenta que las covarianzas y por lo tanto los pesos kriging son determinados enteramente por la configuracioacuten de los datos y el modelo de covarianza no los valores actuales de los datos
Las porosidades en los puntos 5 y 6 podriacutean de hecho ser muy diferentes y este no tendriacutea influencia en los pesos de kriging
El valor de porosidad promedio para 85 pozos es 1470 y los valores de porosidad en los seis pozos del ejemplo son 1384 1215 1287 1268 1441 y 1459 El residual estimado del promedio en u es dado por el producto escalar de los pesos de kriging y los vectores residuales en los puntos de datos
Antildeadiendo el promedio de nuevo dentro de este residual estimada nos da una porosidad
estimada de
Similarmente conectando los pesos de kriging y el vector k dentro de la expresioacuten para la varianza de estimacioacuten nos da una varianza de 0238 (cuadrado del porcentaje) Dado estas dos piezas de informacioacuten podemos representar la porosidad en u = (2000m 4700m) como una distribucioacuten normal con un promedio de 1283 y una variacioacuten estaacutendar de 049 Noacutetese que al igual que los pesos de kriging el estimado de la varianza depende enteramente de la configuracioacuten de los datos y la funcioacuten de covarianza no en los valores de siacute mismos La varianza de estimacioacuten Kriging seriacutea el mismo a pesar de si los valores de porosidad actual en la vecindad fueron muy similares o altamente variable La influencia de los valores de los datos a traveacutes de la adecuacioacuten del modelo de semivariograma es muy indirecta
Aquiacute tenemos los estimados del simple kriging y la desviacioacuten estaacutendar en rejillas 100x80 con 100 metros de espaciamiento usando el modelo de semivariograma esfeacuterico y estimando cada valor de celda de 16 puntos maacutes cercanos de datos vecinos (locaciones de pozos)
Kriging Ordinario
Para el Kriging ordinario en lugar de asumir que la media es constante en todo el dominio se supone que es constante en el vecindario local de cada punto de la estimacioacuten que es m(u)=m(u) para cada valor de los datos en las inmediacionesZ (uα) que usamos para estimar Z(u) En este caso el estimador Kriging puede ser escrito
y filtramos la media local desconocida al exigir que los pesos kriging sumen 1 dando lugar a un estimador kriging ordinario de
Zok(u)=sumα=1
n (u )
λαOK (u )Z (uα )
con
sumα=1
n (u)
λαOK (u )=1
Con el fin de minimizar la varianza del error sujeto a la restriccioacuten de la unidad de suma en los pesos que en realidad instalamos el sistema para que minimice el error de la varianza maacutes un teacutermino adicional que implica un paraacutemetro de Lagrange μOK (u)
L=σE2 (u )+μOK (u )[1minussum
α=1
n (u)
λα (u )]Asiacute la minimizacioacuten con respecto a las fuerzas del paraacutemetro de Lagrange la restriccioacuten seraacute
12partLpart μ
=1minussumα=1
n (u )
λα (u )=0
En este caso el sistema de ecuaciones para los pesos resulta ser
sumβ=1
n (u)
λβOK (u )CR (uαminusuβ )+μOK (u )=C R (uαminusu )
α=1 helliphellip n (u )
sumβ=1
n (u)
λβOK (u )=1
Donde CR (h ) es una vez maacutes la funcioacuten de covarianza para el componente residual de la
variable En Kriging simple podriacutease igualar CR (h ) y C (h ) la funcioacuten de covarianza para la
variable en si debido a la suposicioacuten de un promedio constante Esta cualidad no es fundamentada pero en la praacutectica la sustitucioacuten es generalmente hecho de todos modos en la suposicioacuten que el semivariograma a partir del cual C(h) es derivado efectivamente filtra la influencia de las tendencias de gran escala en la media
De hecho la restriccioacuten de la unidad de suma en los pesos permite el sistema kriging ordinario para ser declarado directamente en teacuterminos del semivariograma (en lugar de los valores CR (h ) de arriba) En este sentido el kriging ordinario es enfoque de interpolacioacuten que sigue naturalmente a partir de un anaacutelisis de semivariograma ya que ambas herramientas tienden a filtrar las tendencias en la media
Una vez que los pesos kriging (y el paraacutemetro de Lagrange) son obtenidos el error de varianza del kriging ordinario es dado por
En los teacuterminos de matriz el sistema de kriging ordinario es una versioacuten aumentada del sistema kriging simple Para nuestro ejemplo de seis puntos seriacutea
Cuya solucioacuten es
La estimacioacuten kriging ordinario en u =(2000 m4700m)resulta ser 1293 con una desviacioacuten estaacutendar de 0490 ligeramente diferentes de los valores de kriging simple de 1283 y 0488
Otra vez usando 16 vecinos maacutes cercanos para cada punto de estimacioacuten la estimacioacuten de porosidad por el kriging ordinario y la desviacioacuten estaacutendar se parecen mucho a las de kriging simple
Kriging con tendencia
El kriging con tendencia (el meacutetodo formalmente como kriging universal) es maacutes parecido al kriging ordinario excepto que en lugar de adecuar justo un promedio local en la vecindad de estimacioacuten de puntos adecuamos una tendencia lineal o de mayor orden en las cordenadas (xy) de los puntos de datos Un modelo de tendencia lineal local (por ejemplo de primer orden) seria dado por
Incluyendo el modelo en el sistema de kriging involucra el mismo tipo de estencion como usamos para el kriging ordinario con la adicioacuten con dos o maacutes paraacutemetros Lagrange y dos
columnas y filas extras en la matriz K de quien sus elementos (ninguno cero) estaacuten en las cordenadas x y y de los puntos de datos Tendencias de alto orden (cuadraacutetica cubica) podriacutea ser manejado de la misma forma pero en la praacutectica esto se raro usar cualquier funcioacuten de tendencia de alto orden que la tendencia de primer orden Kriging Ordinario es kriking con un modelo de tendencia de orden cero
Si la variable de intereacutes exhibe una tendencia significante una aproximacioacuten tiacutepica seriacutea intentar estimar un ldquode-tendenterdquo semivariograma usando uno de los meacutetodos descritos en la lectura de los semivariograma y luego alimentar esto dentro de kriging con una tendencia de primer orden Sin embargo Goovaerts (1997) advierte contra este enfoque y en su lugar recomienda presentar el kriging simple de los residuales de una tendencia global (con un promedio constante de 0) y luego antildeadiendo de nuevo los residuales kriging dentro de la tendencia global
Sea el campo aleatorio Z(s) s isin D sub Rd donde se ha observado el atributo Z en las ubicaciones n s s s 1 2 1048610 y se desear predecir dicho atributo en una ubicacioacuten no observada basaacutendose en los valores obtenidos en las muestras hechas Las teacutecnicas de prediccioacuten espacial son modalidades de una familia de meacutetodos llamada Kriging El nombre se debe al Ingeniero minero DG Krige quien desarrolloacute en la deacutecada de los 50 meacutetodos empiacutericos para predecir caracteriacutesticas de una mina en alguna ubicacioacuten de intereacutes donde no se conociacutean datos usando las caracteriacutesticas conocidas en lugares cercanos donde si habiacutean sido tomados Su meacutetodo original es conocido como Kriging ordinario
El Kriging aparece en muchas formas de acuerdo a si se conocen la media la distribucioacuten de probabilidad de Z(s) si las predicciones son hechas para puntos o aacutereas y asiacute sucesivamente
Sin embargo es importante recordar que el Kriging no es el uacutenico meacutetodo de prediccioacuten espacial existen meacutetodos determiniacutesticos como distancia inversa interpolacioacuten polinomial global interpolacioacuten polinomial local triangulacioacuten lineal funciones de base radial entre otros La ventaja del kriging sobre los meacutetodos determiniacutesticos es la estimacioacuten de la varianza del error de prediccioacuten lo cual permite ademaacutes estimar intervalos de confianza para dicha prediccioacuten ademaacutes de que el kriging es un meacutetodo de estimacioacuten que da el mejor estimador lineal insesgado (cuando se cumplen todos los supuestos) Inicialmente el kriging fue desarrollado para aquellos casos donde hay presencia de estacionariedad y posteriormente fue extendido para casos donde se cumple la hipoacutetesis intriacutenseca
Generalidades sobre el kriging
La toma de muestras da la informacioacuten de lo que ocurre en cada punto Sin embargo no da informacioacuten acerca de la relacioacuten que pueda existir entre dichos puntos Se requiere de una forma precisa de estimar valores en puntos intermedios o en el caso de bloques por ejemplo estimar el promedio sobre el bloque La precisioacuten del estimador usado depende de varios factores
El nuacutemero de muestras tomadas La calidad de la medicioacuten en cada punto Las ubicaciones de las muestras en la zona si las muestras son igualmente espaciadas
se alcanza una mejor cobertura dando mayor informacioacuten acerca de la zona que aquella que se obtendriacutea de muestras muy agrupadas en unos sectores y separadas en otros Sin embargo en la praacutectica debido a las caracteriacutesticas de las regiones de estudio muchas veces es preciso tomar muestras irregularmente espaciadas
Las distancias entre las muestras para la prediccioacuten es maacutes confiable usar muestras vecinas que muestras distantes esto es la precisioacuten mejora cuando la cercaniacutea de las muestras aumenta y se deteriora cuando esta disminuye La extrapolacioacuten no es aconsejable
La continuidad espacial de la variable o atributo en estudio es maacutes faacutecil estimar el valor de una variable bastante regular en una regioacuten que una que presenta grandes fluctuaciones
Introduccioacuten a la teoriacutea del kriging
Supongamos que se tienen las mediciones Z(s1) Z(s2) Z(s3) y Z(s4) en los puntos s1 s2 s3 y s4 respectivamente y se requiere predecir el valor Z(s0) El valor a predecir se ubica mas cerca de s2 que de cualquier otra ubicacioacuten donde se tenga medicioacuten por lo tanto es loacutegico pensar que Z(s0) es mas parecido a Z(s2) que a cualquiera de los otros tres valores medidos De acuerdo a lo anterior se puede optar para la prediccioacuten por una media ponderada de las cuatro mediciones en la cual Z(s2) tiene mayor peso que cualquier otra seguida en su orden por Z(s4) Z(s3) y por uacuteltimo Z(s1)
Donde z(u) es el mejor predictor lineal de kriging
La regioacuten de los seis puntos del ejemplo anterior
FUNDAMENTOS DE KRIGING
La forma baacutesica del estimador Kriging es
El objetivo es determinar pesos λprop lo cual minimiza la varianza del estimador
Bajo la restriccioacuten insesgada
El campo aleatorio (RF) Z (u) es descompuesto dentro de componentes de tendencia y residual Z (u )=R (u )+m(u) con el componente residual tratado como un campo aleatorio con un promedio estacionario de 0 y una covarianza estacionaria (una funcioacuten de retardo h pero no de posicioacuten u)
La funcioacuten de covarianza residual es generalmente derivado del la entrada del modelo
semivariograma
Por lo tanto el semivariograma alimentamos al programa Kriging que debe representar el componente residual de la variable
Los tres principales variantes de Kriging Simple Ordinario y Kriging con una tendencia difiere en sus tratamientos de componente de tendencia m(u)
SIMPLE KRIGING
Para kriging simple asumimos que la tendencia del componente es un promedio constante y conocido m (u )=m de modo que
Este estimado es automaacuteticamente insesgado desde que de modo que
El error de estimacioacuten es una combinacioacuten lineal de variables aleatorias representando residuales en los puntos de datos uα y el punto de estimacioacuten u
Usando reglas para la varianza de una combinacioacuten lineal de variables aleatorias la varianza de error es luego dado por
Para minimizar la varianza de error tomaremos la derivada de la expresioacuten anterior con respecto a cada peso de kriging y se pone cada derivada a cero Esto induce al siguiente sistema de ecuaciones
Debido a que el promedio es constante la funcioacuten de covarianza para Z (u ) es el mismo que
para el componente residual C (h )=CR(h) de modo que podemos escribir el sistema de
kriging simple directamente en teacuterminos de C (h )
Esto puede ser escrito en forma de matriz como
Donde KSK es la matriz de covarianza entre los puntos de datos con elementos
K i j=C (uiminusu j) k es el vector de covarianza entre los puntos de datos y el punto de
estimacioacuten con elementos dados por k i=C(uiminusu) y λSK (u) es el vector de pesos de simple kriging para los puntos de datos circundantes Si el modelo de covarianza es licito (es decir el modelo semivariograma subyacentes es liacutecito) y no hay dos puntos de datos que sean colocalizadas luego la matriz de covarianza de datos es definida positiva y podemos resolver para los pesos de kriging usando
λSK=Kminus1k
Una vez que tenemos los pesos de kriging podemos calcular la estimacioacuten kriging y la varianza de kriging el cual es dado por
Despueacutes substituyendo los pesos de kriging dentro de la expresioacuten de varianza de error anterior
iquestQueacute hace toda esta matemaacutetica
Esto encuentra un set de pesos para estimar el valor de variabilidad en la locacioacuten de valores en un set de puntos de datos vecinos El peso en cada punto de datos generalmente decrece con el incremento de la distancia a ese punto en concordancia con las decrecientes covariazas de datos de estimacioacuten especificado en la mano derecha del vector k Sin embargo el set de pesos es tambieacuten disentildeado para tener en cuenta la redundancia entre los puntos de datos representados en las covarianzas de punto de datos ldquopunto a datordquo en la matris K Multiplicando k por K-1 (en la izquierda) disminuiraacute los pesos de los puntos cayendo en relativos grupos a puntos aislados a la misma distancia
Aplicaremos Kriging simple a nuestros datos de porosidad usando el variograma esfeacuterico que ajustamos anteriormente con cero ldquonuggetrdquo un ldquosillrdquo de 078 y un rango de 4141m
Ya que estamos usando un semivariograma esfeacuterico la funcioacuten de covarianza es dado por
Para distancias de separacioacuten h arriba de 4141m y 0 maacutes allaacute de ese rango El graacutefico de abajo muestra los elementos de la mano derechas del vector
k=[038 056 032 049 046 037 ]T obtenido de conectar las distancias del dato a punto
de estimacioacuten dentro de esta funcioacuten de covarianza
La matriz de distancias entre pares de puntos de datos (redondeando al metro maacutes cercano) es dado por
Esto se traslada dentro de una matriz de covarianza de datos
(redondeado a lugares de 2 decimales) Note en particular la correlacioacuten relativamente alta entre los puntos 5 y 6 separado por 447m El vector resultante de los pesos de kriging es
Observe que el punto 6 es asignado a muy pequentildeos pesos relativo al punto 1 de datos aunque ambos estaacuten a la misma distancia desde el punto de estimacioacuten y tienen aproximadamente la misma covarianza de puntos de datos para la estimacioacuten de puntos (k 1=038 k6=037) Esto es por que el punto 6 de datos es efectivamente ldquoscreenedrdquo por el e cercano punto 5 de datos
Los puntos de datos 5 y 6 bastante estrechamente correlacionada con cualquiera y 5 tiene mas fuerte correlacion con el punto estimado vemos que el punto 6 de datos es efectivamente ignorado Tenga en cuenta que las covarianzas y por lo tanto los pesos kriging son determinados enteramente por la configuracioacuten de los datos y el modelo de covarianza no los valores actuales de los datos
Las porosidades en los puntos 5 y 6 podriacutean de hecho ser muy diferentes y este no tendriacutea influencia en los pesos de kriging
El valor de porosidad promedio para 85 pozos es 1470 y los valores de porosidad en los seis pozos del ejemplo son 1384 1215 1287 1268 1441 y 1459 El residual estimado del promedio en u es dado por el producto escalar de los pesos de kriging y los vectores residuales en los puntos de datos
Antildeadiendo el promedio de nuevo dentro de este residual estimada nos da una porosidad
estimada de
Similarmente conectando los pesos de kriging y el vector k dentro de la expresioacuten para la varianza de estimacioacuten nos da una varianza de 0238 (cuadrado del porcentaje) Dado estas dos piezas de informacioacuten podemos representar la porosidad en u = (2000m 4700m) como una distribucioacuten normal con un promedio de 1283 y una variacioacuten estaacutendar de 049 Noacutetese que al igual que los pesos de kriging el estimado de la varianza depende enteramente de la configuracioacuten de los datos y la funcioacuten de covarianza no en los valores de siacute mismos La varianza de estimacioacuten Kriging seriacutea el mismo a pesar de si los valores de porosidad actual en la vecindad fueron muy similares o altamente variable La influencia de los valores de los datos a traveacutes de la adecuacioacuten del modelo de semivariograma es muy indirecta
Aquiacute tenemos los estimados del simple kriging y la desviacioacuten estaacutendar en rejillas 100x80 con 100 metros de espaciamiento usando el modelo de semivariograma esfeacuterico y estimando cada valor de celda de 16 puntos maacutes cercanos de datos vecinos (locaciones de pozos)
Kriging Ordinario
Para el Kriging ordinario en lugar de asumir que la media es constante en todo el dominio se supone que es constante en el vecindario local de cada punto de la estimacioacuten que es m(u)=m(u) para cada valor de los datos en las inmediacionesZ (uα) que usamos para estimar Z(u) En este caso el estimador Kriging puede ser escrito
y filtramos la media local desconocida al exigir que los pesos kriging sumen 1 dando lugar a un estimador kriging ordinario de
Zok(u)=sumα=1
n (u )
λαOK (u )Z (uα )
con
sumα=1
n (u)
λαOK (u )=1
Con el fin de minimizar la varianza del error sujeto a la restriccioacuten de la unidad de suma en los pesos que en realidad instalamos el sistema para que minimice el error de la varianza maacutes un teacutermino adicional que implica un paraacutemetro de Lagrange μOK (u)
L=σE2 (u )+μOK (u )[1minussum
α=1
n (u)
λα (u )]Asiacute la minimizacioacuten con respecto a las fuerzas del paraacutemetro de Lagrange la restriccioacuten seraacute
12partLpart μ
=1minussumα=1
n (u )
λα (u )=0
En este caso el sistema de ecuaciones para los pesos resulta ser
sumβ=1
n (u)
λβOK (u )CR (uαminusuβ )+μOK (u )=C R (uαminusu )
α=1 helliphellip n (u )
sumβ=1
n (u)
λβOK (u )=1
Donde CR (h ) es una vez maacutes la funcioacuten de covarianza para el componente residual de la
variable En Kriging simple podriacutease igualar CR (h ) y C (h ) la funcioacuten de covarianza para la
variable en si debido a la suposicioacuten de un promedio constante Esta cualidad no es fundamentada pero en la praacutectica la sustitucioacuten es generalmente hecho de todos modos en la suposicioacuten que el semivariograma a partir del cual C(h) es derivado efectivamente filtra la influencia de las tendencias de gran escala en la media
De hecho la restriccioacuten de la unidad de suma en los pesos permite el sistema kriging ordinario para ser declarado directamente en teacuterminos del semivariograma (en lugar de los valores CR (h ) de arriba) En este sentido el kriging ordinario es enfoque de interpolacioacuten que sigue naturalmente a partir de un anaacutelisis de semivariograma ya que ambas herramientas tienden a filtrar las tendencias en la media
Una vez que los pesos kriging (y el paraacutemetro de Lagrange) son obtenidos el error de varianza del kriging ordinario es dado por
En los teacuterminos de matriz el sistema de kriging ordinario es una versioacuten aumentada del sistema kriging simple Para nuestro ejemplo de seis puntos seriacutea
Cuya solucioacuten es
La estimacioacuten kriging ordinario en u =(2000 m4700m)resulta ser 1293 con una desviacioacuten estaacutendar de 0490 ligeramente diferentes de los valores de kriging simple de 1283 y 0488
Otra vez usando 16 vecinos maacutes cercanos para cada punto de estimacioacuten la estimacioacuten de porosidad por el kriging ordinario y la desviacioacuten estaacutendar se parecen mucho a las de kriging simple
Kriging con tendencia
El kriging con tendencia (el meacutetodo formalmente como kriging universal) es maacutes parecido al kriging ordinario excepto que en lugar de adecuar justo un promedio local en la vecindad de estimacioacuten de puntos adecuamos una tendencia lineal o de mayor orden en las cordenadas (xy) de los puntos de datos Un modelo de tendencia lineal local (por ejemplo de primer orden) seria dado por
Incluyendo el modelo en el sistema de kriging involucra el mismo tipo de estencion como usamos para el kriging ordinario con la adicioacuten con dos o maacutes paraacutemetros Lagrange y dos
columnas y filas extras en la matriz K de quien sus elementos (ninguno cero) estaacuten en las cordenadas x y y de los puntos de datos Tendencias de alto orden (cuadraacutetica cubica) podriacutea ser manejado de la misma forma pero en la praacutectica esto se raro usar cualquier funcioacuten de tendencia de alto orden que la tendencia de primer orden Kriging Ordinario es kriking con un modelo de tendencia de orden cero
Si la variable de intereacutes exhibe una tendencia significante una aproximacioacuten tiacutepica seriacutea intentar estimar un ldquode-tendenterdquo semivariograma usando uno de los meacutetodos descritos en la lectura de los semivariograma y luego alimentar esto dentro de kriging con una tendencia de primer orden Sin embargo Goovaerts (1997) advierte contra este enfoque y en su lugar recomienda presentar el kriging simple de los residuales de una tendencia global (con un promedio constante de 0) y luego antildeadiendo de nuevo los residuales kriging dentro de la tendencia global
Sea el campo aleatorio Z(s) s isin D sub Rd donde se ha observado el atributo Z en las ubicaciones n s s s 1 2 1048610 y se desear predecir dicho atributo en una ubicacioacuten no observada basaacutendose en los valores obtenidos en las muestras hechas Las teacutecnicas de prediccioacuten espacial son modalidades de una familia de meacutetodos llamada Kriging El nombre se debe al Ingeniero minero DG Krige quien desarrolloacute en la deacutecada de los 50 meacutetodos empiacutericos para predecir caracteriacutesticas de una mina en alguna ubicacioacuten de intereacutes donde no se conociacutean datos usando las caracteriacutesticas conocidas en lugares cercanos donde si habiacutean sido tomados Su meacutetodo original es conocido como Kriging ordinario
El Kriging aparece en muchas formas de acuerdo a si se conocen la media la distribucioacuten de probabilidad de Z(s) si las predicciones son hechas para puntos o aacutereas y asiacute sucesivamente
Sin embargo es importante recordar que el Kriging no es el uacutenico meacutetodo de prediccioacuten espacial existen meacutetodos determiniacutesticos como distancia inversa interpolacioacuten polinomial global interpolacioacuten polinomial local triangulacioacuten lineal funciones de base radial entre otros La ventaja del kriging sobre los meacutetodos determiniacutesticos es la estimacioacuten de la varianza del error de prediccioacuten lo cual permite ademaacutes estimar intervalos de confianza para dicha prediccioacuten ademaacutes de que el kriging es un meacutetodo de estimacioacuten que da el mejor estimador lineal insesgado (cuando se cumplen todos los supuestos) Inicialmente el kriging fue desarrollado para aquellos casos donde hay presencia de estacionariedad y posteriormente fue extendido para casos donde se cumple la hipoacutetesis intriacutenseca
Generalidades sobre el kriging
La toma de muestras da la informacioacuten de lo que ocurre en cada punto Sin embargo no da informacioacuten acerca de la relacioacuten que pueda existir entre dichos puntos Se requiere de una forma precisa de estimar valores en puntos intermedios o en el caso de bloques por ejemplo estimar el promedio sobre el bloque La precisioacuten del estimador usado depende de varios factores
El nuacutemero de muestras tomadas La calidad de la medicioacuten en cada punto Las ubicaciones de las muestras en la zona si las muestras son igualmente espaciadas
se alcanza una mejor cobertura dando mayor informacioacuten acerca de la zona que aquella que se obtendriacutea de muestras muy agrupadas en unos sectores y separadas en otros Sin embargo en la praacutectica debido a las caracteriacutesticas de las regiones de estudio muchas veces es preciso tomar muestras irregularmente espaciadas
Las distancias entre las muestras para la prediccioacuten es maacutes confiable usar muestras vecinas que muestras distantes esto es la precisioacuten mejora cuando la cercaniacutea de las muestras aumenta y se deteriora cuando esta disminuye La extrapolacioacuten no es aconsejable
La continuidad espacial de la variable o atributo en estudio es maacutes faacutecil estimar el valor de una variable bastante regular en una regioacuten que una que presenta grandes fluctuaciones
Introduccioacuten a la teoriacutea del kriging
Supongamos que se tienen las mediciones Z(s1) Z(s2) Z(s3) y Z(s4) en los puntos s1 s2 s3 y s4 respectivamente y se requiere predecir el valor Z(s0) El valor a predecir se ubica mas cerca de s2 que de cualquier otra ubicacioacuten donde se tenga medicioacuten por lo tanto es loacutegico pensar que Z(s0) es mas parecido a Z(s2) que a cualquiera de los otros tres valores medidos De acuerdo a lo anterior se puede optar para la prediccioacuten por una media ponderada de las cuatro mediciones en la cual Z(s2) tiene mayor peso que cualquier otra seguida en su orden por Z(s4) Z(s3) y por uacuteltimo Z(s1)
Donde z(u) es el mejor predictor lineal de kriging
La funcioacuten de covarianza residual es generalmente derivado del la entrada del modelo
semivariograma
Por lo tanto el semivariograma alimentamos al programa Kriging que debe representar el componente residual de la variable
Los tres principales variantes de Kriging Simple Ordinario y Kriging con una tendencia difiere en sus tratamientos de componente de tendencia m(u)
SIMPLE KRIGING
Para kriging simple asumimos que la tendencia del componente es un promedio constante y conocido m (u )=m de modo que
Este estimado es automaacuteticamente insesgado desde que de modo que
El error de estimacioacuten es una combinacioacuten lineal de variables aleatorias representando residuales en los puntos de datos uα y el punto de estimacioacuten u
Usando reglas para la varianza de una combinacioacuten lineal de variables aleatorias la varianza de error es luego dado por
Para minimizar la varianza de error tomaremos la derivada de la expresioacuten anterior con respecto a cada peso de kriging y se pone cada derivada a cero Esto induce al siguiente sistema de ecuaciones
Debido a que el promedio es constante la funcioacuten de covarianza para Z (u ) es el mismo que
para el componente residual C (h )=CR(h) de modo que podemos escribir el sistema de
kriging simple directamente en teacuterminos de C (h )
Esto puede ser escrito en forma de matriz como
Donde KSK es la matriz de covarianza entre los puntos de datos con elementos
K i j=C (uiminusu j) k es el vector de covarianza entre los puntos de datos y el punto de
estimacioacuten con elementos dados por k i=C(uiminusu) y λSK (u) es el vector de pesos de simple kriging para los puntos de datos circundantes Si el modelo de covarianza es licito (es decir el modelo semivariograma subyacentes es liacutecito) y no hay dos puntos de datos que sean colocalizadas luego la matriz de covarianza de datos es definida positiva y podemos resolver para los pesos de kriging usando
λSK=Kminus1k
Una vez que tenemos los pesos de kriging podemos calcular la estimacioacuten kriging y la varianza de kriging el cual es dado por
Despueacutes substituyendo los pesos de kriging dentro de la expresioacuten de varianza de error anterior
iquestQueacute hace toda esta matemaacutetica
Esto encuentra un set de pesos para estimar el valor de variabilidad en la locacioacuten de valores en un set de puntos de datos vecinos El peso en cada punto de datos generalmente decrece con el incremento de la distancia a ese punto en concordancia con las decrecientes covariazas de datos de estimacioacuten especificado en la mano derecha del vector k Sin embargo el set de pesos es tambieacuten disentildeado para tener en cuenta la redundancia entre los puntos de datos representados en las covarianzas de punto de datos ldquopunto a datordquo en la matris K Multiplicando k por K-1 (en la izquierda) disminuiraacute los pesos de los puntos cayendo en relativos grupos a puntos aislados a la misma distancia
Aplicaremos Kriging simple a nuestros datos de porosidad usando el variograma esfeacuterico que ajustamos anteriormente con cero ldquonuggetrdquo un ldquosillrdquo de 078 y un rango de 4141m
Ya que estamos usando un semivariograma esfeacuterico la funcioacuten de covarianza es dado por
Para distancias de separacioacuten h arriba de 4141m y 0 maacutes allaacute de ese rango El graacutefico de abajo muestra los elementos de la mano derechas del vector
k=[038 056 032 049 046 037 ]T obtenido de conectar las distancias del dato a punto
de estimacioacuten dentro de esta funcioacuten de covarianza
La matriz de distancias entre pares de puntos de datos (redondeando al metro maacutes cercano) es dado por
Esto se traslada dentro de una matriz de covarianza de datos
(redondeado a lugares de 2 decimales) Note en particular la correlacioacuten relativamente alta entre los puntos 5 y 6 separado por 447m El vector resultante de los pesos de kriging es
Observe que el punto 6 es asignado a muy pequentildeos pesos relativo al punto 1 de datos aunque ambos estaacuten a la misma distancia desde el punto de estimacioacuten y tienen aproximadamente la misma covarianza de puntos de datos para la estimacioacuten de puntos (k 1=038 k6=037) Esto es por que el punto 6 de datos es efectivamente ldquoscreenedrdquo por el e cercano punto 5 de datos
Los puntos de datos 5 y 6 bastante estrechamente correlacionada con cualquiera y 5 tiene mas fuerte correlacion con el punto estimado vemos que el punto 6 de datos es efectivamente ignorado Tenga en cuenta que las covarianzas y por lo tanto los pesos kriging son determinados enteramente por la configuracioacuten de los datos y el modelo de covarianza no los valores actuales de los datos
Las porosidades en los puntos 5 y 6 podriacutean de hecho ser muy diferentes y este no tendriacutea influencia en los pesos de kriging
El valor de porosidad promedio para 85 pozos es 1470 y los valores de porosidad en los seis pozos del ejemplo son 1384 1215 1287 1268 1441 y 1459 El residual estimado del promedio en u es dado por el producto escalar de los pesos de kriging y los vectores residuales en los puntos de datos
Antildeadiendo el promedio de nuevo dentro de este residual estimada nos da una porosidad
estimada de
Similarmente conectando los pesos de kriging y el vector k dentro de la expresioacuten para la varianza de estimacioacuten nos da una varianza de 0238 (cuadrado del porcentaje) Dado estas dos piezas de informacioacuten podemos representar la porosidad en u = (2000m 4700m) como una distribucioacuten normal con un promedio de 1283 y una variacioacuten estaacutendar de 049 Noacutetese que al igual que los pesos de kriging el estimado de la varianza depende enteramente de la configuracioacuten de los datos y la funcioacuten de covarianza no en los valores de siacute mismos La varianza de estimacioacuten Kriging seriacutea el mismo a pesar de si los valores de porosidad actual en la vecindad fueron muy similares o altamente variable La influencia de los valores de los datos a traveacutes de la adecuacioacuten del modelo de semivariograma es muy indirecta
Aquiacute tenemos los estimados del simple kriging y la desviacioacuten estaacutendar en rejillas 100x80 con 100 metros de espaciamiento usando el modelo de semivariograma esfeacuterico y estimando cada valor de celda de 16 puntos maacutes cercanos de datos vecinos (locaciones de pozos)
Kriging Ordinario
Para el Kriging ordinario en lugar de asumir que la media es constante en todo el dominio se supone que es constante en el vecindario local de cada punto de la estimacioacuten que es m(u)=m(u) para cada valor de los datos en las inmediacionesZ (uα) que usamos para estimar Z(u) En este caso el estimador Kriging puede ser escrito
y filtramos la media local desconocida al exigir que los pesos kriging sumen 1 dando lugar a un estimador kriging ordinario de
Zok(u)=sumα=1
n (u )
λαOK (u )Z (uα )
con
sumα=1
n (u)
λαOK (u )=1
Con el fin de minimizar la varianza del error sujeto a la restriccioacuten de la unidad de suma en los pesos que en realidad instalamos el sistema para que minimice el error de la varianza maacutes un teacutermino adicional que implica un paraacutemetro de Lagrange μOK (u)
L=σE2 (u )+μOK (u )[1minussum
α=1
n (u)
λα (u )]Asiacute la minimizacioacuten con respecto a las fuerzas del paraacutemetro de Lagrange la restriccioacuten seraacute
12partLpart μ
=1minussumα=1
n (u )
λα (u )=0
En este caso el sistema de ecuaciones para los pesos resulta ser
sumβ=1
n (u)
λβOK (u )CR (uαminusuβ )+μOK (u )=C R (uαminusu )
α=1 helliphellip n (u )
sumβ=1
n (u)
λβOK (u )=1
Donde CR (h ) es una vez maacutes la funcioacuten de covarianza para el componente residual de la
variable En Kriging simple podriacutease igualar CR (h ) y C (h ) la funcioacuten de covarianza para la
variable en si debido a la suposicioacuten de un promedio constante Esta cualidad no es fundamentada pero en la praacutectica la sustitucioacuten es generalmente hecho de todos modos en la suposicioacuten que el semivariograma a partir del cual C(h) es derivado efectivamente filtra la influencia de las tendencias de gran escala en la media
De hecho la restriccioacuten de la unidad de suma en los pesos permite el sistema kriging ordinario para ser declarado directamente en teacuterminos del semivariograma (en lugar de los valores CR (h ) de arriba) En este sentido el kriging ordinario es enfoque de interpolacioacuten que sigue naturalmente a partir de un anaacutelisis de semivariograma ya que ambas herramientas tienden a filtrar las tendencias en la media
Una vez que los pesos kriging (y el paraacutemetro de Lagrange) son obtenidos el error de varianza del kriging ordinario es dado por
En los teacuterminos de matriz el sistema de kriging ordinario es una versioacuten aumentada del sistema kriging simple Para nuestro ejemplo de seis puntos seriacutea
Cuya solucioacuten es
La estimacioacuten kriging ordinario en u =(2000 m4700m)resulta ser 1293 con una desviacioacuten estaacutendar de 0490 ligeramente diferentes de los valores de kriging simple de 1283 y 0488
Otra vez usando 16 vecinos maacutes cercanos para cada punto de estimacioacuten la estimacioacuten de porosidad por el kriging ordinario y la desviacioacuten estaacutendar se parecen mucho a las de kriging simple
Kriging con tendencia
El kriging con tendencia (el meacutetodo formalmente como kriging universal) es maacutes parecido al kriging ordinario excepto que en lugar de adecuar justo un promedio local en la vecindad de estimacioacuten de puntos adecuamos una tendencia lineal o de mayor orden en las cordenadas (xy) de los puntos de datos Un modelo de tendencia lineal local (por ejemplo de primer orden) seria dado por
Incluyendo el modelo en el sistema de kriging involucra el mismo tipo de estencion como usamos para el kriging ordinario con la adicioacuten con dos o maacutes paraacutemetros Lagrange y dos
columnas y filas extras en la matriz K de quien sus elementos (ninguno cero) estaacuten en las cordenadas x y y de los puntos de datos Tendencias de alto orden (cuadraacutetica cubica) podriacutea ser manejado de la misma forma pero en la praacutectica esto se raro usar cualquier funcioacuten de tendencia de alto orden que la tendencia de primer orden Kriging Ordinario es kriking con un modelo de tendencia de orden cero
Si la variable de intereacutes exhibe una tendencia significante una aproximacioacuten tiacutepica seriacutea intentar estimar un ldquode-tendenterdquo semivariograma usando uno de los meacutetodos descritos en la lectura de los semivariograma y luego alimentar esto dentro de kriging con una tendencia de primer orden Sin embargo Goovaerts (1997) advierte contra este enfoque y en su lugar recomienda presentar el kriging simple de los residuales de una tendencia global (con un promedio constante de 0) y luego antildeadiendo de nuevo los residuales kriging dentro de la tendencia global
Sea el campo aleatorio Z(s) s isin D sub Rd donde se ha observado el atributo Z en las ubicaciones n s s s 1 2 1048610 y se desear predecir dicho atributo en una ubicacioacuten no observada basaacutendose en los valores obtenidos en las muestras hechas Las teacutecnicas de prediccioacuten espacial son modalidades de una familia de meacutetodos llamada Kriging El nombre se debe al Ingeniero minero DG Krige quien desarrolloacute en la deacutecada de los 50 meacutetodos empiacutericos para predecir caracteriacutesticas de una mina en alguna ubicacioacuten de intereacutes donde no se conociacutean datos usando las caracteriacutesticas conocidas en lugares cercanos donde si habiacutean sido tomados Su meacutetodo original es conocido como Kriging ordinario
El Kriging aparece en muchas formas de acuerdo a si se conocen la media la distribucioacuten de probabilidad de Z(s) si las predicciones son hechas para puntos o aacutereas y asiacute sucesivamente
Sin embargo es importante recordar que el Kriging no es el uacutenico meacutetodo de prediccioacuten espacial existen meacutetodos determiniacutesticos como distancia inversa interpolacioacuten polinomial global interpolacioacuten polinomial local triangulacioacuten lineal funciones de base radial entre otros La ventaja del kriging sobre los meacutetodos determiniacutesticos es la estimacioacuten de la varianza del error de prediccioacuten lo cual permite ademaacutes estimar intervalos de confianza para dicha prediccioacuten ademaacutes de que el kriging es un meacutetodo de estimacioacuten que da el mejor estimador lineal insesgado (cuando se cumplen todos los supuestos) Inicialmente el kriging fue desarrollado para aquellos casos donde hay presencia de estacionariedad y posteriormente fue extendido para casos donde se cumple la hipoacutetesis intriacutenseca
Generalidades sobre el kriging
La toma de muestras da la informacioacuten de lo que ocurre en cada punto Sin embargo no da informacioacuten acerca de la relacioacuten que pueda existir entre dichos puntos Se requiere de una forma precisa de estimar valores en puntos intermedios o en el caso de bloques por ejemplo estimar el promedio sobre el bloque La precisioacuten del estimador usado depende de varios factores
El nuacutemero de muestras tomadas La calidad de la medicioacuten en cada punto Las ubicaciones de las muestras en la zona si las muestras son igualmente espaciadas
se alcanza una mejor cobertura dando mayor informacioacuten acerca de la zona que aquella que se obtendriacutea de muestras muy agrupadas en unos sectores y separadas en otros Sin embargo en la praacutectica debido a las caracteriacutesticas de las regiones de estudio muchas veces es preciso tomar muestras irregularmente espaciadas
Las distancias entre las muestras para la prediccioacuten es maacutes confiable usar muestras vecinas que muestras distantes esto es la precisioacuten mejora cuando la cercaniacutea de las muestras aumenta y se deteriora cuando esta disminuye La extrapolacioacuten no es aconsejable
La continuidad espacial de la variable o atributo en estudio es maacutes faacutecil estimar el valor de una variable bastante regular en una regioacuten que una que presenta grandes fluctuaciones
Introduccioacuten a la teoriacutea del kriging
Supongamos que se tienen las mediciones Z(s1) Z(s2) Z(s3) y Z(s4) en los puntos s1 s2 s3 y s4 respectivamente y se requiere predecir el valor Z(s0) El valor a predecir se ubica mas cerca de s2 que de cualquier otra ubicacioacuten donde se tenga medicioacuten por lo tanto es loacutegico pensar que Z(s0) es mas parecido a Z(s2) que a cualquiera de los otros tres valores medidos De acuerdo a lo anterior se puede optar para la prediccioacuten por una media ponderada de las cuatro mediciones en la cual Z(s2) tiene mayor peso que cualquier otra seguida en su orden por Z(s4) Z(s3) y por uacuteltimo Z(s1)
Donde z(u) es el mejor predictor lineal de kriging

Debido a que el promedio es constante la funcioacuten de covarianza para Z (u ) es el mismo que
para el componente residual C (h )=CR(h) de modo que podemos escribir el sistema de
kriging simple directamente en teacuterminos de C (h )
Esto puede ser escrito en forma de matriz como
Donde KSK es la matriz de covarianza entre los puntos de datos con elementos
K i j=C (uiminusu j) k es el vector de covarianza entre los puntos de datos y el punto de
estimacioacuten con elementos dados por k i=C(uiminusu) y λSK (u) es el vector de pesos de simple kriging para los puntos de datos circundantes Si el modelo de covarianza es licito (es decir el modelo semivariograma subyacentes es liacutecito) y no hay dos puntos de datos que sean colocalizadas luego la matriz de covarianza de datos es definida positiva y podemos resolver para los pesos de kriging usando
λSK=Kminus1k
Una vez que tenemos los pesos de kriging podemos calcular la estimacioacuten kriging y la varianza de kriging el cual es dado por
Despueacutes substituyendo los pesos de kriging dentro de la expresioacuten de varianza de error anterior
iquestQueacute hace toda esta matemaacutetica
Esto encuentra un set de pesos para estimar el valor de variabilidad en la locacioacuten de valores en un set de puntos de datos vecinos El peso en cada punto de datos generalmente decrece con el incremento de la distancia a ese punto en concordancia con las decrecientes covariazas de datos de estimacioacuten especificado en la mano derecha del vector k Sin embargo el set de pesos es tambieacuten disentildeado para tener en cuenta la redundancia entre los puntos de datos representados en las covarianzas de punto de datos ldquopunto a datordquo en la matris K Multiplicando k por K-1 (en la izquierda) disminuiraacute los pesos de los puntos cayendo en relativos grupos a puntos aislados a la misma distancia
Aplicaremos Kriging simple a nuestros datos de porosidad usando el variograma esfeacuterico que ajustamos anteriormente con cero ldquonuggetrdquo un ldquosillrdquo de 078 y un rango de 4141m
Ya que estamos usando un semivariograma esfeacuterico la funcioacuten de covarianza es dado por
Para distancias de separacioacuten h arriba de 4141m y 0 maacutes allaacute de ese rango El graacutefico de abajo muestra los elementos de la mano derechas del vector
k=[038 056 032 049 046 037 ]T obtenido de conectar las distancias del dato a punto
de estimacioacuten dentro de esta funcioacuten de covarianza
La matriz de distancias entre pares de puntos de datos (redondeando al metro maacutes cercano) es dado por
Esto se traslada dentro de una matriz de covarianza de datos
(redondeado a lugares de 2 decimales) Note en particular la correlacioacuten relativamente alta entre los puntos 5 y 6 separado por 447m El vector resultante de los pesos de kriging es
Observe que el punto 6 es asignado a muy pequentildeos pesos relativo al punto 1 de datos aunque ambos estaacuten a la misma distancia desde el punto de estimacioacuten y tienen aproximadamente la misma covarianza de puntos de datos para la estimacioacuten de puntos (k 1=038 k6=037) Esto es por que el punto 6 de datos es efectivamente ldquoscreenedrdquo por el e cercano punto 5 de datos
Los puntos de datos 5 y 6 bastante estrechamente correlacionada con cualquiera y 5 tiene mas fuerte correlacion con el punto estimado vemos que el punto 6 de datos es efectivamente ignorado Tenga en cuenta que las covarianzas y por lo tanto los pesos kriging son determinados enteramente por la configuracioacuten de los datos y el modelo de covarianza no los valores actuales de los datos
Las porosidades en los puntos 5 y 6 podriacutean de hecho ser muy diferentes y este no tendriacutea influencia en los pesos de kriging
El valor de porosidad promedio para 85 pozos es 1470 y los valores de porosidad en los seis pozos del ejemplo son 1384 1215 1287 1268 1441 y 1459 El residual estimado del promedio en u es dado por el producto escalar de los pesos de kriging y los vectores residuales en los puntos de datos
Antildeadiendo el promedio de nuevo dentro de este residual estimada nos da una porosidad
estimada de
Similarmente conectando los pesos de kriging y el vector k dentro de la expresioacuten para la varianza de estimacioacuten nos da una varianza de 0238 (cuadrado del porcentaje) Dado estas dos piezas de informacioacuten podemos representar la porosidad en u = (2000m 4700m) como una distribucioacuten normal con un promedio de 1283 y una variacioacuten estaacutendar de 049 Noacutetese que al igual que los pesos de kriging el estimado de la varianza depende enteramente de la configuracioacuten de los datos y la funcioacuten de covarianza no en los valores de siacute mismos La varianza de estimacioacuten Kriging seriacutea el mismo a pesar de si los valores de porosidad actual en la vecindad fueron muy similares o altamente variable La influencia de los valores de los datos a traveacutes de la adecuacioacuten del modelo de semivariograma es muy indirecta
Aquiacute tenemos los estimados del simple kriging y la desviacioacuten estaacutendar en rejillas 100x80 con 100 metros de espaciamiento usando el modelo de semivariograma esfeacuterico y estimando cada valor de celda de 16 puntos maacutes cercanos de datos vecinos (locaciones de pozos)
Kriging Ordinario
Para el Kriging ordinario en lugar de asumir que la media es constante en todo el dominio se supone que es constante en el vecindario local de cada punto de la estimacioacuten que es m(u)=m(u) para cada valor de los datos en las inmediacionesZ (uα) que usamos para estimar Z(u) En este caso el estimador Kriging puede ser escrito
y filtramos la media local desconocida al exigir que los pesos kriging sumen 1 dando lugar a un estimador kriging ordinario de
Zok(u)=sumα=1
n (u )
λαOK (u )Z (uα )
con
sumα=1
n (u)
λαOK (u )=1
Con el fin de minimizar la varianza del error sujeto a la restriccioacuten de la unidad de suma en los pesos que en realidad instalamos el sistema para que minimice el error de la varianza maacutes un teacutermino adicional que implica un paraacutemetro de Lagrange μOK (u)
L=σE2 (u )+μOK (u )[1minussum
α=1
n (u)
λα (u )]Asiacute la minimizacioacuten con respecto a las fuerzas del paraacutemetro de Lagrange la restriccioacuten seraacute
12partLpart μ
=1minussumα=1
n (u )
λα (u )=0
En este caso el sistema de ecuaciones para los pesos resulta ser
sumβ=1
n (u)
λβOK (u )CR (uαminusuβ )+μOK (u )=C R (uαminusu )
α=1 helliphellip n (u )
sumβ=1
n (u)
λβOK (u )=1
Donde CR (h ) es una vez maacutes la funcioacuten de covarianza para el componente residual de la
variable En Kriging simple podriacutease igualar CR (h ) y C (h ) la funcioacuten de covarianza para la
variable en si debido a la suposicioacuten de un promedio constante Esta cualidad no es fundamentada pero en la praacutectica la sustitucioacuten es generalmente hecho de todos modos en la suposicioacuten que el semivariograma a partir del cual C(h) es derivado efectivamente filtra la influencia de las tendencias de gran escala en la media
De hecho la restriccioacuten de la unidad de suma en los pesos permite el sistema kriging ordinario para ser declarado directamente en teacuterminos del semivariograma (en lugar de los valores CR (h ) de arriba) En este sentido el kriging ordinario es enfoque de interpolacioacuten que sigue naturalmente a partir de un anaacutelisis de semivariograma ya que ambas herramientas tienden a filtrar las tendencias en la media
Una vez que los pesos kriging (y el paraacutemetro de Lagrange) son obtenidos el error de varianza del kriging ordinario es dado por
En los teacuterminos de matriz el sistema de kriging ordinario es una versioacuten aumentada del sistema kriging simple Para nuestro ejemplo de seis puntos seriacutea
Cuya solucioacuten es
La estimacioacuten kriging ordinario en u =(2000 m4700m)resulta ser 1293 con una desviacioacuten estaacutendar de 0490 ligeramente diferentes de los valores de kriging simple de 1283 y 0488
Otra vez usando 16 vecinos maacutes cercanos para cada punto de estimacioacuten la estimacioacuten de porosidad por el kriging ordinario y la desviacioacuten estaacutendar se parecen mucho a las de kriging simple
Kriging con tendencia
El kriging con tendencia (el meacutetodo formalmente como kriging universal) es maacutes parecido al kriging ordinario excepto que en lugar de adecuar justo un promedio local en la vecindad de estimacioacuten de puntos adecuamos una tendencia lineal o de mayor orden en las cordenadas (xy) de los puntos de datos Un modelo de tendencia lineal local (por ejemplo de primer orden) seria dado por
Incluyendo el modelo en el sistema de kriging involucra el mismo tipo de estencion como usamos para el kriging ordinario con la adicioacuten con dos o maacutes paraacutemetros Lagrange y dos
columnas y filas extras en la matriz K de quien sus elementos (ninguno cero) estaacuten en las cordenadas x y y de los puntos de datos Tendencias de alto orden (cuadraacutetica cubica) podriacutea ser manejado de la misma forma pero en la praacutectica esto se raro usar cualquier funcioacuten de tendencia de alto orden que la tendencia de primer orden Kriging Ordinario es kriking con un modelo de tendencia de orden cero
Si la variable de intereacutes exhibe una tendencia significante una aproximacioacuten tiacutepica seriacutea intentar estimar un ldquode-tendenterdquo semivariograma usando uno de los meacutetodos descritos en la lectura de los semivariograma y luego alimentar esto dentro de kriging con una tendencia de primer orden Sin embargo Goovaerts (1997) advierte contra este enfoque y en su lugar recomienda presentar el kriging simple de los residuales de una tendencia global (con un promedio constante de 0) y luego antildeadiendo de nuevo los residuales kriging dentro de la tendencia global
Sea el campo aleatorio Z(s) s isin D sub Rd donde se ha observado el atributo Z en las ubicaciones n s s s 1 2 1048610 y se desear predecir dicho atributo en una ubicacioacuten no observada basaacutendose en los valores obtenidos en las muestras hechas Las teacutecnicas de prediccioacuten espacial son modalidades de una familia de meacutetodos llamada Kriging El nombre se debe al Ingeniero minero DG Krige quien desarrolloacute en la deacutecada de los 50 meacutetodos empiacutericos para predecir caracteriacutesticas de una mina en alguna ubicacioacuten de intereacutes donde no se conociacutean datos usando las caracteriacutesticas conocidas en lugares cercanos donde si habiacutean sido tomados Su meacutetodo original es conocido como Kriging ordinario
El Kriging aparece en muchas formas de acuerdo a si se conocen la media la distribucioacuten de probabilidad de Z(s) si las predicciones son hechas para puntos o aacutereas y asiacute sucesivamente
Sin embargo es importante recordar que el Kriging no es el uacutenico meacutetodo de prediccioacuten espacial existen meacutetodos determiniacutesticos como distancia inversa interpolacioacuten polinomial global interpolacioacuten polinomial local triangulacioacuten lineal funciones de base radial entre otros La ventaja del kriging sobre los meacutetodos determiniacutesticos es la estimacioacuten de la varianza del error de prediccioacuten lo cual permite ademaacutes estimar intervalos de confianza para dicha prediccioacuten ademaacutes de que el kriging es un meacutetodo de estimacioacuten que da el mejor estimador lineal insesgado (cuando se cumplen todos los supuestos) Inicialmente el kriging fue desarrollado para aquellos casos donde hay presencia de estacionariedad y posteriormente fue extendido para casos donde se cumple la hipoacutetesis intriacutenseca
Generalidades sobre el kriging
La toma de muestras da la informacioacuten de lo que ocurre en cada punto Sin embargo no da informacioacuten acerca de la relacioacuten que pueda existir entre dichos puntos Se requiere de una forma precisa de estimar valores en puntos intermedios o en el caso de bloques por ejemplo estimar el promedio sobre el bloque La precisioacuten del estimador usado depende de varios factores
El nuacutemero de muestras tomadas La calidad de la medicioacuten en cada punto Las ubicaciones de las muestras en la zona si las muestras son igualmente espaciadas
se alcanza una mejor cobertura dando mayor informacioacuten acerca de la zona que aquella que se obtendriacutea de muestras muy agrupadas en unos sectores y separadas en otros Sin embargo en la praacutectica debido a las caracteriacutesticas de las regiones de estudio muchas veces es preciso tomar muestras irregularmente espaciadas
Las distancias entre las muestras para la prediccioacuten es maacutes confiable usar muestras vecinas que muestras distantes esto es la precisioacuten mejora cuando la cercaniacutea de las muestras aumenta y se deteriora cuando esta disminuye La extrapolacioacuten no es aconsejable
La continuidad espacial de la variable o atributo en estudio es maacutes faacutecil estimar el valor de una variable bastante regular en una regioacuten que una que presenta grandes fluctuaciones
Introduccioacuten a la teoriacutea del kriging
Supongamos que se tienen las mediciones Z(s1) Z(s2) Z(s3) y Z(s4) en los puntos s1 s2 s3 y s4 respectivamente y se requiere predecir el valor Z(s0) El valor a predecir se ubica mas cerca de s2 que de cualquier otra ubicacioacuten donde se tenga medicioacuten por lo tanto es loacutegico pensar que Z(s0) es mas parecido a Z(s2) que a cualquiera de los otros tres valores medidos De acuerdo a lo anterior se puede optar para la prediccioacuten por una media ponderada de las cuatro mediciones en la cual Z(s2) tiene mayor peso que cualquier otra seguida en su orden por Z(s4) Z(s3) y por uacuteltimo Z(s1)
Donde z(u) es el mejor predictor lineal de kriging
Ya que estamos usando un semivariograma esfeacuterico la funcioacuten de covarianza es dado por
Para distancias de separacioacuten h arriba de 4141m y 0 maacutes allaacute de ese rango El graacutefico de abajo muestra los elementos de la mano derechas del vector
k=[038 056 032 049 046 037 ]T obtenido de conectar las distancias del dato a punto
de estimacioacuten dentro de esta funcioacuten de covarianza
La matriz de distancias entre pares de puntos de datos (redondeando al metro maacutes cercano) es dado por
Esto se traslada dentro de una matriz de covarianza de datos
(redondeado a lugares de 2 decimales) Note en particular la correlacioacuten relativamente alta entre los puntos 5 y 6 separado por 447m El vector resultante de los pesos de kriging es
Observe que el punto 6 es asignado a muy pequentildeos pesos relativo al punto 1 de datos aunque ambos estaacuten a la misma distancia desde el punto de estimacioacuten y tienen aproximadamente la misma covarianza de puntos de datos para la estimacioacuten de puntos (k 1=038 k6=037) Esto es por que el punto 6 de datos es efectivamente ldquoscreenedrdquo por el e cercano punto 5 de datos
Los puntos de datos 5 y 6 bastante estrechamente correlacionada con cualquiera y 5 tiene mas fuerte correlacion con el punto estimado vemos que el punto 6 de datos es efectivamente ignorado Tenga en cuenta que las covarianzas y por lo tanto los pesos kriging son determinados enteramente por la configuracioacuten de los datos y el modelo de covarianza no los valores actuales de los datos
Las porosidades en los puntos 5 y 6 podriacutean de hecho ser muy diferentes y este no tendriacutea influencia en los pesos de kriging
El valor de porosidad promedio para 85 pozos es 1470 y los valores de porosidad en los seis pozos del ejemplo son 1384 1215 1287 1268 1441 y 1459 El residual estimado del promedio en u es dado por el producto escalar de los pesos de kriging y los vectores residuales en los puntos de datos
Antildeadiendo el promedio de nuevo dentro de este residual estimada nos da una porosidad
estimada de
Similarmente conectando los pesos de kriging y el vector k dentro de la expresioacuten para la varianza de estimacioacuten nos da una varianza de 0238 (cuadrado del porcentaje) Dado estas dos piezas de informacioacuten podemos representar la porosidad en u = (2000m 4700m) como una distribucioacuten normal con un promedio de 1283 y una variacioacuten estaacutendar de 049 Noacutetese que al igual que los pesos de kriging el estimado de la varianza depende enteramente de la configuracioacuten de los datos y la funcioacuten de covarianza no en los valores de siacute mismos La varianza de estimacioacuten Kriging seriacutea el mismo a pesar de si los valores de porosidad actual en la vecindad fueron muy similares o altamente variable La influencia de los valores de los datos a traveacutes de la adecuacioacuten del modelo de semivariograma es muy indirecta
Aquiacute tenemos los estimados del simple kriging y la desviacioacuten estaacutendar en rejillas 100x80 con 100 metros de espaciamiento usando el modelo de semivariograma esfeacuterico y estimando cada valor de celda de 16 puntos maacutes cercanos de datos vecinos (locaciones de pozos)
Kriging Ordinario
Para el Kriging ordinario en lugar de asumir que la media es constante en todo el dominio se supone que es constante en el vecindario local de cada punto de la estimacioacuten que es m(u)=m(u) para cada valor de los datos en las inmediacionesZ (uα) que usamos para estimar Z(u) En este caso el estimador Kriging puede ser escrito
y filtramos la media local desconocida al exigir que los pesos kriging sumen 1 dando lugar a un estimador kriging ordinario de
Zok(u)=sumα=1
n (u )
λαOK (u )Z (uα )
con
sumα=1
n (u)
λαOK (u )=1
Con el fin de minimizar la varianza del error sujeto a la restriccioacuten de la unidad de suma en los pesos que en realidad instalamos el sistema para que minimice el error de la varianza maacutes un teacutermino adicional que implica un paraacutemetro de Lagrange μOK (u)
L=σE2 (u )+μOK (u )[1minussum
α=1
n (u)
λα (u )]Asiacute la minimizacioacuten con respecto a las fuerzas del paraacutemetro de Lagrange la restriccioacuten seraacute
12partLpart μ
=1minussumα=1
n (u )
λα (u )=0
En este caso el sistema de ecuaciones para los pesos resulta ser
sumβ=1
n (u)
λβOK (u )CR (uαminusuβ )+μOK (u )=C R (uαminusu )
α=1 helliphellip n (u )
sumβ=1
n (u)
λβOK (u )=1
Donde CR (h ) es una vez maacutes la funcioacuten de covarianza para el componente residual de la
variable En Kriging simple podriacutease igualar CR (h ) y C (h ) la funcioacuten de covarianza para la
variable en si debido a la suposicioacuten de un promedio constante Esta cualidad no es fundamentada pero en la praacutectica la sustitucioacuten es generalmente hecho de todos modos en la suposicioacuten que el semivariograma a partir del cual C(h) es derivado efectivamente filtra la influencia de las tendencias de gran escala en la media
De hecho la restriccioacuten de la unidad de suma en los pesos permite el sistema kriging ordinario para ser declarado directamente en teacuterminos del semivariograma (en lugar de los valores CR (h ) de arriba) En este sentido el kriging ordinario es enfoque de interpolacioacuten que sigue naturalmente a partir de un anaacutelisis de semivariograma ya que ambas herramientas tienden a filtrar las tendencias en la media
Una vez que los pesos kriging (y el paraacutemetro de Lagrange) son obtenidos el error de varianza del kriging ordinario es dado por
En los teacuterminos de matriz el sistema de kriging ordinario es una versioacuten aumentada del sistema kriging simple Para nuestro ejemplo de seis puntos seriacutea
Cuya solucioacuten es
La estimacioacuten kriging ordinario en u =(2000 m4700m)resulta ser 1293 con una desviacioacuten estaacutendar de 0490 ligeramente diferentes de los valores de kriging simple de 1283 y 0488
Otra vez usando 16 vecinos maacutes cercanos para cada punto de estimacioacuten la estimacioacuten de porosidad por el kriging ordinario y la desviacioacuten estaacutendar se parecen mucho a las de kriging simple
Kriging con tendencia
El kriging con tendencia (el meacutetodo formalmente como kriging universal) es maacutes parecido al kriging ordinario excepto que en lugar de adecuar justo un promedio local en la vecindad de estimacioacuten de puntos adecuamos una tendencia lineal o de mayor orden en las cordenadas (xy) de los puntos de datos Un modelo de tendencia lineal local (por ejemplo de primer orden) seria dado por
Incluyendo el modelo en el sistema de kriging involucra el mismo tipo de estencion como usamos para el kriging ordinario con la adicioacuten con dos o maacutes paraacutemetros Lagrange y dos
columnas y filas extras en la matriz K de quien sus elementos (ninguno cero) estaacuten en las cordenadas x y y de los puntos de datos Tendencias de alto orden (cuadraacutetica cubica) podriacutea ser manejado de la misma forma pero en la praacutectica esto se raro usar cualquier funcioacuten de tendencia de alto orden que la tendencia de primer orden Kriging Ordinario es kriking con un modelo de tendencia de orden cero
Si la variable de intereacutes exhibe una tendencia significante una aproximacioacuten tiacutepica seriacutea intentar estimar un ldquode-tendenterdquo semivariograma usando uno de los meacutetodos descritos en la lectura de los semivariograma y luego alimentar esto dentro de kriging con una tendencia de primer orden Sin embargo Goovaerts (1997) advierte contra este enfoque y en su lugar recomienda presentar el kriging simple de los residuales de una tendencia global (con un promedio constante de 0) y luego antildeadiendo de nuevo los residuales kriging dentro de la tendencia global
Sea el campo aleatorio Z(s) s isin D sub Rd donde se ha observado el atributo Z en las ubicaciones n s s s 1 2 1048610 y se desear predecir dicho atributo en una ubicacioacuten no observada basaacutendose en los valores obtenidos en las muestras hechas Las teacutecnicas de prediccioacuten espacial son modalidades de una familia de meacutetodos llamada Kriging El nombre se debe al Ingeniero minero DG Krige quien desarrolloacute en la deacutecada de los 50 meacutetodos empiacutericos para predecir caracteriacutesticas de una mina en alguna ubicacioacuten de intereacutes donde no se conociacutean datos usando las caracteriacutesticas conocidas en lugares cercanos donde si habiacutean sido tomados Su meacutetodo original es conocido como Kriging ordinario
El Kriging aparece en muchas formas de acuerdo a si se conocen la media la distribucioacuten de probabilidad de Z(s) si las predicciones son hechas para puntos o aacutereas y asiacute sucesivamente
Sin embargo es importante recordar que el Kriging no es el uacutenico meacutetodo de prediccioacuten espacial existen meacutetodos determiniacutesticos como distancia inversa interpolacioacuten polinomial global interpolacioacuten polinomial local triangulacioacuten lineal funciones de base radial entre otros La ventaja del kriging sobre los meacutetodos determiniacutesticos es la estimacioacuten de la varianza del error de prediccioacuten lo cual permite ademaacutes estimar intervalos de confianza para dicha prediccioacuten ademaacutes de que el kriging es un meacutetodo de estimacioacuten que da el mejor estimador lineal insesgado (cuando se cumplen todos los supuestos) Inicialmente el kriging fue desarrollado para aquellos casos donde hay presencia de estacionariedad y posteriormente fue extendido para casos donde se cumple la hipoacutetesis intriacutenseca
Generalidades sobre el kriging
La toma de muestras da la informacioacuten de lo que ocurre en cada punto Sin embargo no da informacioacuten acerca de la relacioacuten que pueda existir entre dichos puntos Se requiere de una forma precisa de estimar valores en puntos intermedios o en el caso de bloques por ejemplo estimar el promedio sobre el bloque La precisioacuten del estimador usado depende de varios factores
El nuacutemero de muestras tomadas La calidad de la medicioacuten en cada punto Las ubicaciones de las muestras en la zona si las muestras son igualmente espaciadas
se alcanza una mejor cobertura dando mayor informacioacuten acerca de la zona que aquella que se obtendriacutea de muestras muy agrupadas en unos sectores y separadas en otros Sin embargo en la praacutectica debido a las caracteriacutesticas de las regiones de estudio muchas veces es preciso tomar muestras irregularmente espaciadas
Las distancias entre las muestras para la prediccioacuten es maacutes confiable usar muestras vecinas que muestras distantes esto es la precisioacuten mejora cuando la cercaniacutea de las muestras aumenta y se deteriora cuando esta disminuye La extrapolacioacuten no es aconsejable
La continuidad espacial de la variable o atributo en estudio es maacutes faacutecil estimar el valor de una variable bastante regular en una regioacuten que una que presenta grandes fluctuaciones
Introduccioacuten a la teoriacutea del kriging
Supongamos que se tienen las mediciones Z(s1) Z(s2) Z(s3) y Z(s4) en los puntos s1 s2 s3 y s4 respectivamente y se requiere predecir el valor Z(s0) El valor a predecir se ubica mas cerca de s2 que de cualquier otra ubicacioacuten donde se tenga medicioacuten por lo tanto es loacutegico pensar que Z(s0) es mas parecido a Z(s2) que a cualquiera de los otros tres valores medidos De acuerdo a lo anterior se puede optar para la prediccioacuten por una media ponderada de las cuatro mediciones en la cual Z(s2) tiene mayor peso que cualquier otra seguida en su orden por Z(s4) Z(s3) y por uacuteltimo Z(s1)
Donde z(u) es el mejor predictor lineal de kriging
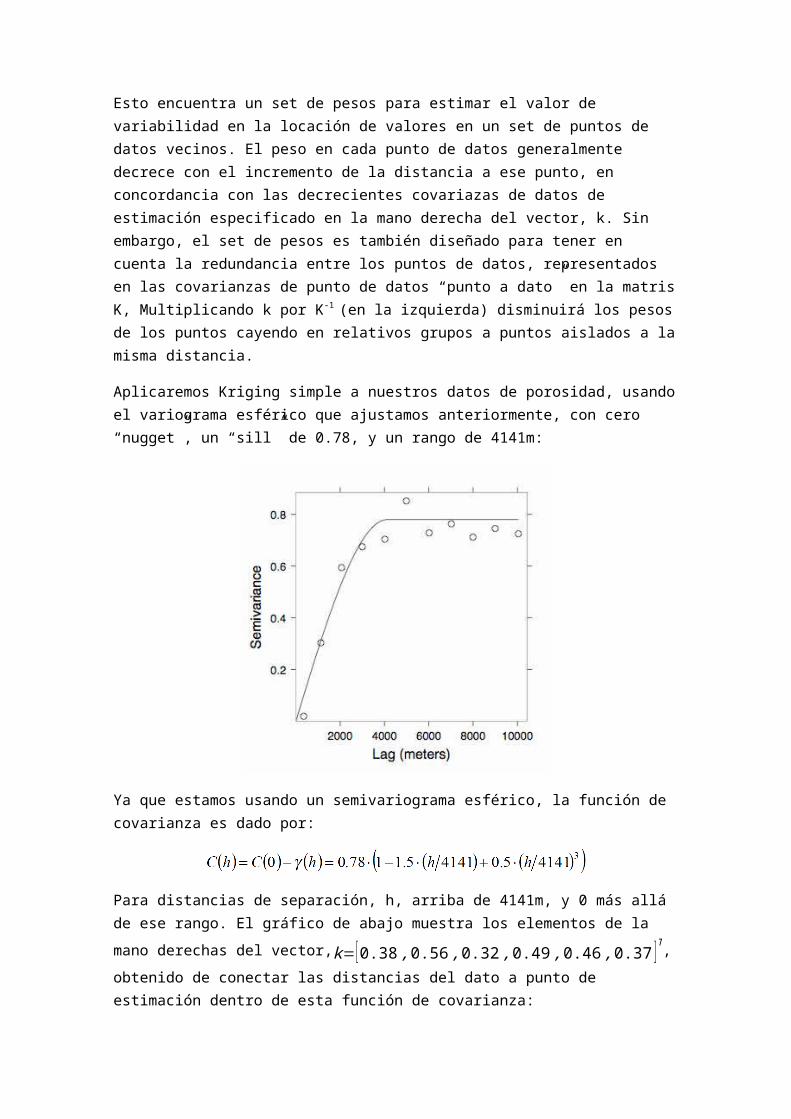
Esto se traslada dentro de una matriz de covarianza de datos
(redondeado a lugares de 2 decimales) Note en particular la correlacioacuten relativamente alta entre los puntos 5 y 6 separado por 447m El vector resultante de los pesos de kriging es
Observe que el punto 6 es asignado a muy pequentildeos pesos relativo al punto 1 de datos aunque ambos estaacuten a la misma distancia desde el punto de estimacioacuten y tienen aproximadamente la misma covarianza de puntos de datos para la estimacioacuten de puntos (k 1=038 k6=037) Esto es por que el punto 6 de datos es efectivamente ldquoscreenedrdquo por el e cercano punto 5 de datos
Los puntos de datos 5 y 6 bastante estrechamente correlacionada con cualquiera y 5 tiene mas fuerte correlacion con el punto estimado vemos que el punto 6 de datos es efectivamente ignorado Tenga en cuenta que las covarianzas y por lo tanto los pesos kriging son determinados enteramente por la configuracioacuten de los datos y el modelo de covarianza no los valores actuales de los datos
Las porosidades en los puntos 5 y 6 podriacutean de hecho ser muy diferentes y este no tendriacutea influencia en los pesos de kriging
El valor de porosidad promedio para 85 pozos es 1470 y los valores de porosidad en los seis pozos del ejemplo son 1384 1215 1287 1268 1441 y 1459 El residual estimado del promedio en u es dado por el producto escalar de los pesos de kriging y los vectores residuales en los puntos de datos
Antildeadiendo el promedio de nuevo dentro de este residual estimada nos da una porosidad
estimada de
Similarmente conectando los pesos de kriging y el vector k dentro de la expresioacuten para la varianza de estimacioacuten nos da una varianza de 0238 (cuadrado del porcentaje) Dado estas dos piezas de informacioacuten podemos representar la porosidad en u = (2000m 4700m) como una distribucioacuten normal con un promedio de 1283 y una variacioacuten estaacutendar de 049 Noacutetese que al igual que los pesos de kriging el estimado de la varianza depende enteramente de la configuracioacuten de los datos y la funcioacuten de covarianza no en los valores de siacute mismos La varianza de estimacioacuten Kriging seriacutea el mismo a pesar de si los valores de porosidad actual en la vecindad fueron muy similares o altamente variable La influencia de los valores de los datos a traveacutes de la adecuacioacuten del modelo de semivariograma es muy indirecta
Aquiacute tenemos los estimados del simple kriging y la desviacioacuten estaacutendar en rejillas 100x80 con 100 metros de espaciamiento usando el modelo de semivariograma esfeacuterico y estimando cada valor de celda de 16 puntos maacutes cercanos de datos vecinos (locaciones de pozos)
Kriging Ordinario
Para el Kriging ordinario en lugar de asumir que la media es constante en todo el dominio se supone que es constante en el vecindario local de cada punto de la estimacioacuten que es m(u)=m(u) para cada valor de los datos en las inmediacionesZ (uα) que usamos para estimar Z(u) En este caso el estimador Kriging puede ser escrito
y filtramos la media local desconocida al exigir que los pesos kriging sumen 1 dando lugar a un estimador kriging ordinario de
Zok(u)=sumα=1
n (u )
λαOK (u )Z (uα )
con
sumα=1
n (u)
λαOK (u )=1
Con el fin de minimizar la varianza del error sujeto a la restriccioacuten de la unidad de suma en los pesos que en realidad instalamos el sistema para que minimice el error de la varianza maacutes un teacutermino adicional que implica un paraacutemetro de Lagrange μOK (u)
L=σE2 (u )+μOK (u )[1minussum
α=1
n (u)
λα (u )]Asiacute la minimizacioacuten con respecto a las fuerzas del paraacutemetro de Lagrange la restriccioacuten seraacute
12partLpart μ
=1minussumα=1
n (u )
λα (u )=0
En este caso el sistema de ecuaciones para los pesos resulta ser
sumβ=1
n (u)
λβOK (u )CR (uαminusuβ )+μOK (u )=C R (uαminusu )
α=1 helliphellip n (u )
sumβ=1
n (u)
λβOK (u )=1
Donde CR (h ) es una vez maacutes la funcioacuten de covarianza para el componente residual de la
variable En Kriging simple podriacutease igualar CR (h ) y C (h ) la funcioacuten de covarianza para la
variable en si debido a la suposicioacuten de un promedio constante Esta cualidad no es fundamentada pero en la praacutectica la sustitucioacuten es generalmente hecho de todos modos en la suposicioacuten que el semivariograma a partir del cual C(h) es derivado efectivamente filtra la influencia de las tendencias de gran escala en la media
De hecho la restriccioacuten de la unidad de suma en los pesos permite el sistema kriging ordinario para ser declarado directamente en teacuterminos del semivariograma (en lugar de los valores CR (h ) de arriba) En este sentido el kriging ordinario es enfoque de interpolacioacuten que sigue naturalmente a partir de un anaacutelisis de semivariograma ya que ambas herramientas tienden a filtrar las tendencias en la media
Una vez que los pesos kriging (y el paraacutemetro de Lagrange) son obtenidos el error de varianza del kriging ordinario es dado por
En los teacuterminos de matriz el sistema de kriging ordinario es una versioacuten aumentada del sistema kriging simple Para nuestro ejemplo de seis puntos seriacutea
Cuya solucioacuten es
La estimacioacuten kriging ordinario en u =(2000 m4700m)resulta ser 1293 con una desviacioacuten estaacutendar de 0490 ligeramente diferentes de los valores de kriging simple de 1283 y 0488
Otra vez usando 16 vecinos maacutes cercanos para cada punto de estimacioacuten la estimacioacuten de porosidad por el kriging ordinario y la desviacioacuten estaacutendar se parecen mucho a las de kriging simple
Kriging con tendencia
El kriging con tendencia (el meacutetodo formalmente como kriging universal) es maacutes parecido al kriging ordinario excepto que en lugar de adecuar justo un promedio local en la vecindad de estimacioacuten de puntos adecuamos una tendencia lineal o de mayor orden en las cordenadas (xy) de los puntos de datos Un modelo de tendencia lineal local (por ejemplo de primer orden) seria dado por
Incluyendo el modelo en el sistema de kriging involucra el mismo tipo de estencion como usamos para el kriging ordinario con la adicioacuten con dos o maacutes paraacutemetros Lagrange y dos
columnas y filas extras en la matriz K de quien sus elementos (ninguno cero) estaacuten en las cordenadas x y y de los puntos de datos Tendencias de alto orden (cuadraacutetica cubica) podriacutea ser manejado de la misma forma pero en la praacutectica esto se raro usar cualquier funcioacuten de tendencia de alto orden que la tendencia de primer orden Kriging Ordinario es kriking con un modelo de tendencia de orden cero
Si la variable de intereacutes exhibe una tendencia significante una aproximacioacuten tiacutepica seriacutea intentar estimar un ldquode-tendenterdquo semivariograma usando uno de los meacutetodos descritos en la lectura de los semivariograma y luego alimentar esto dentro de kriging con una tendencia de primer orden Sin embargo Goovaerts (1997) advierte contra este enfoque y en su lugar recomienda presentar el kriging simple de los residuales de una tendencia global (con un promedio constante de 0) y luego antildeadiendo de nuevo los residuales kriging dentro de la tendencia global
Sea el campo aleatorio Z(s) s isin D sub Rd donde se ha observado el atributo Z en las ubicaciones n s s s 1 2 1048610 y se desear predecir dicho atributo en una ubicacioacuten no observada basaacutendose en los valores obtenidos en las muestras hechas Las teacutecnicas de prediccioacuten espacial son modalidades de una familia de meacutetodos llamada Kriging El nombre se debe al Ingeniero minero DG Krige quien desarrolloacute en la deacutecada de los 50 meacutetodos empiacutericos para predecir caracteriacutesticas de una mina en alguna ubicacioacuten de intereacutes donde no se conociacutean datos usando las caracteriacutesticas conocidas en lugares cercanos donde si habiacutean sido tomados Su meacutetodo original es conocido como Kriging ordinario
El Kriging aparece en muchas formas de acuerdo a si se conocen la media la distribucioacuten de probabilidad de Z(s) si las predicciones son hechas para puntos o aacutereas y asiacute sucesivamente
Sin embargo es importante recordar que el Kriging no es el uacutenico meacutetodo de prediccioacuten espacial existen meacutetodos determiniacutesticos como distancia inversa interpolacioacuten polinomial global interpolacioacuten polinomial local triangulacioacuten lineal funciones de base radial entre otros La ventaja del kriging sobre los meacutetodos determiniacutesticos es la estimacioacuten de la varianza del error de prediccioacuten lo cual permite ademaacutes estimar intervalos de confianza para dicha prediccioacuten ademaacutes de que el kriging es un meacutetodo de estimacioacuten que da el mejor estimador lineal insesgado (cuando se cumplen todos los supuestos) Inicialmente el kriging fue desarrollado para aquellos casos donde hay presencia de estacionariedad y posteriormente fue extendido para casos donde se cumple la hipoacutetesis intriacutenseca
Generalidades sobre el kriging
La toma de muestras da la informacioacuten de lo que ocurre en cada punto Sin embargo no da informacioacuten acerca de la relacioacuten que pueda existir entre dichos puntos Se requiere de una forma precisa de estimar valores en puntos intermedios o en el caso de bloques por ejemplo estimar el promedio sobre el bloque La precisioacuten del estimador usado depende de varios factores
El nuacutemero de muestras tomadas La calidad de la medicioacuten en cada punto Las ubicaciones de las muestras en la zona si las muestras son igualmente espaciadas
se alcanza una mejor cobertura dando mayor informacioacuten acerca de la zona que aquella que se obtendriacutea de muestras muy agrupadas en unos sectores y separadas en otros Sin embargo en la praacutectica debido a las caracteriacutesticas de las regiones de estudio muchas veces es preciso tomar muestras irregularmente espaciadas
Las distancias entre las muestras para la prediccioacuten es maacutes confiable usar muestras vecinas que muestras distantes esto es la precisioacuten mejora cuando la cercaniacutea de las muestras aumenta y se deteriora cuando esta disminuye La extrapolacioacuten no es aconsejable
La continuidad espacial de la variable o atributo en estudio es maacutes faacutecil estimar el valor de una variable bastante regular en una regioacuten que una que presenta grandes fluctuaciones
Introduccioacuten a la teoriacutea del kriging
Supongamos que se tienen las mediciones Z(s1) Z(s2) Z(s3) y Z(s4) en los puntos s1 s2 s3 y s4 respectivamente y se requiere predecir el valor Z(s0) El valor a predecir se ubica mas cerca de s2 que de cualquier otra ubicacioacuten donde se tenga medicioacuten por lo tanto es loacutegico pensar que Z(s0) es mas parecido a Z(s2) que a cualquiera de los otros tres valores medidos De acuerdo a lo anterior se puede optar para la prediccioacuten por una media ponderada de las cuatro mediciones en la cual Z(s2) tiene mayor peso que cualquier otra seguida en su orden por Z(s4) Z(s3) y por uacuteltimo Z(s1)
Donde z(u) es el mejor predictor lineal de kriging

Las porosidades en los puntos 5 y 6 podriacutean de hecho ser muy diferentes y este no tendriacutea influencia en los pesos de kriging
El valor de porosidad promedio para 85 pozos es 1470 y los valores de porosidad en los seis pozos del ejemplo son 1384 1215 1287 1268 1441 y 1459 El residual estimado del promedio en u es dado por el producto escalar de los pesos de kriging y los vectores residuales en los puntos de datos
Antildeadiendo el promedio de nuevo dentro de este residual estimada nos da una porosidad
estimada de
Similarmente conectando los pesos de kriging y el vector k dentro de la expresioacuten para la varianza de estimacioacuten nos da una varianza de 0238 (cuadrado del porcentaje) Dado estas dos piezas de informacioacuten podemos representar la porosidad en u = (2000m 4700m) como una distribucioacuten normal con un promedio de 1283 y una variacioacuten estaacutendar de 049 Noacutetese que al igual que los pesos de kriging el estimado de la varianza depende enteramente de la configuracioacuten de los datos y la funcioacuten de covarianza no en los valores de siacute mismos La varianza de estimacioacuten Kriging seriacutea el mismo a pesar de si los valores de porosidad actual en la vecindad fueron muy similares o altamente variable La influencia de los valores de los datos a traveacutes de la adecuacioacuten del modelo de semivariograma es muy indirecta
Aquiacute tenemos los estimados del simple kriging y la desviacioacuten estaacutendar en rejillas 100x80 con 100 metros de espaciamiento usando el modelo de semivariograma esfeacuterico y estimando cada valor de celda de 16 puntos maacutes cercanos de datos vecinos (locaciones de pozos)
Kriging Ordinario
Para el Kriging ordinario en lugar de asumir que la media es constante en todo el dominio se supone que es constante en el vecindario local de cada punto de la estimacioacuten que es m(u)=m(u) para cada valor de los datos en las inmediacionesZ (uα) que usamos para estimar Z(u) En este caso el estimador Kriging puede ser escrito
y filtramos la media local desconocida al exigir que los pesos kriging sumen 1 dando lugar a un estimador kriging ordinario de
Zok(u)=sumα=1
n (u )
λαOK (u )Z (uα )
con
sumα=1
n (u)
λαOK (u )=1
Con el fin de minimizar la varianza del error sujeto a la restriccioacuten de la unidad de suma en los pesos que en realidad instalamos el sistema para que minimice el error de la varianza maacutes un teacutermino adicional que implica un paraacutemetro de Lagrange μOK (u)
L=σE2 (u )+μOK (u )[1minussum
α=1
n (u)
λα (u )]Asiacute la minimizacioacuten con respecto a las fuerzas del paraacutemetro de Lagrange la restriccioacuten seraacute
12partLpart μ
=1minussumα=1
n (u )
λα (u )=0
En este caso el sistema de ecuaciones para los pesos resulta ser
sumβ=1
n (u)
λβOK (u )CR (uαminusuβ )+μOK (u )=C R (uαminusu )
α=1 helliphellip n (u )
sumβ=1
n (u)
λβOK (u )=1
Donde CR (h ) es una vez maacutes la funcioacuten de covarianza para el componente residual de la
variable En Kriging simple podriacutease igualar CR (h ) y C (h ) la funcioacuten de covarianza para la
variable en si debido a la suposicioacuten de un promedio constante Esta cualidad no es fundamentada pero en la praacutectica la sustitucioacuten es generalmente hecho de todos modos en la suposicioacuten que el semivariograma a partir del cual C(h) es derivado efectivamente filtra la influencia de las tendencias de gran escala en la media
De hecho la restriccioacuten de la unidad de suma en los pesos permite el sistema kriging ordinario para ser declarado directamente en teacuterminos del semivariograma (en lugar de los valores CR (h ) de arriba) En este sentido el kriging ordinario es enfoque de interpolacioacuten que sigue naturalmente a partir de un anaacutelisis de semivariograma ya que ambas herramientas tienden a filtrar las tendencias en la media
Una vez que los pesos kriging (y el paraacutemetro de Lagrange) son obtenidos el error de varianza del kriging ordinario es dado por
En los teacuterminos de matriz el sistema de kriging ordinario es una versioacuten aumentada del sistema kriging simple Para nuestro ejemplo de seis puntos seriacutea
Cuya solucioacuten es
La estimacioacuten kriging ordinario en u =(2000 m4700m)resulta ser 1293 con una desviacioacuten estaacutendar de 0490 ligeramente diferentes de los valores de kriging simple de 1283 y 0488
Otra vez usando 16 vecinos maacutes cercanos para cada punto de estimacioacuten la estimacioacuten de porosidad por el kriging ordinario y la desviacioacuten estaacutendar se parecen mucho a las de kriging simple
Kriging con tendencia
El kriging con tendencia (el meacutetodo formalmente como kriging universal) es maacutes parecido al kriging ordinario excepto que en lugar de adecuar justo un promedio local en la vecindad de estimacioacuten de puntos adecuamos una tendencia lineal o de mayor orden en las cordenadas (xy) de los puntos de datos Un modelo de tendencia lineal local (por ejemplo de primer orden) seria dado por
Incluyendo el modelo en el sistema de kriging involucra el mismo tipo de estencion como usamos para el kriging ordinario con la adicioacuten con dos o maacutes paraacutemetros Lagrange y dos
columnas y filas extras en la matriz K de quien sus elementos (ninguno cero) estaacuten en las cordenadas x y y de los puntos de datos Tendencias de alto orden (cuadraacutetica cubica) podriacutea ser manejado de la misma forma pero en la praacutectica esto se raro usar cualquier funcioacuten de tendencia de alto orden que la tendencia de primer orden Kriging Ordinario es kriking con un modelo de tendencia de orden cero
Si la variable de intereacutes exhibe una tendencia significante una aproximacioacuten tiacutepica seriacutea intentar estimar un ldquode-tendenterdquo semivariograma usando uno de los meacutetodos descritos en la lectura de los semivariograma y luego alimentar esto dentro de kriging con una tendencia de primer orden Sin embargo Goovaerts (1997) advierte contra este enfoque y en su lugar recomienda presentar el kriging simple de los residuales de una tendencia global (con un promedio constante de 0) y luego antildeadiendo de nuevo los residuales kriging dentro de la tendencia global
Sea el campo aleatorio Z(s) s isin D sub Rd donde se ha observado el atributo Z en las ubicaciones n s s s 1 2 1048610 y se desear predecir dicho atributo en una ubicacioacuten no observada basaacutendose en los valores obtenidos en las muestras hechas Las teacutecnicas de prediccioacuten espacial son modalidades de una familia de meacutetodos llamada Kriging El nombre se debe al Ingeniero minero DG Krige quien desarrolloacute en la deacutecada de los 50 meacutetodos empiacutericos para predecir caracteriacutesticas de una mina en alguna ubicacioacuten de intereacutes donde no se conociacutean datos usando las caracteriacutesticas conocidas en lugares cercanos donde si habiacutean sido tomados Su meacutetodo original es conocido como Kriging ordinario
El Kriging aparece en muchas formas de acuerdo a si se conocen la media la distribucioacuten de probabilidad de Z(s) si las predicciones son hechas para puntos o aacutereas y asiacute sucesivamente
Sin embargo es importante recordar que el Kriging no es el uacutenico meacutetodo de prediccioacuten espacial existen meacutetodos determiniacutesticos como distancia inversa interpolacioacuten polinomial global interpolacioacuten polinomial local triangulacioacuten lineal funciones de base radial entre otros La ventaja del kriging sobre los meacutetodos determiniacutesticos es la estimacioacuten de la varianza del error de prediccioacuten lo cual permite ademaacutes estimar intervalos de confianza para dicha prediccioacuten ademaacutes de que el kriging es un meacutetodo de estimacioacuten que da el mejor estimador lineal insesgado (cuando se cumplen todos los supuestos) Inicialmente el kriging fue desarrollado para aquellos casos donde hay presencia de estacionariedad y posteriormente fue extendido para casos donde se cumple la hipoacutetesis intriacutenseca
Generalidades sobre el kriging
La toma de muestras da la informacioacuten de lo que ocurre en cada punto Sin embargo no da informacioacuten acerca de la relacioacuten que pueda existir entre dichos puntos Se requiere de una forma precisa de estimar valores en puntos intermedios o en el caso de bloques por ejemplo estimar el promedio sobre el bloque La precisioacuten del estimador usado depende de varios factores
El nuacutemero de muestras tomadas La calidad de la medicioacuten en cada punto Las ubicaciones de las muestras en la zona si las muestras son igualmente espaciadas
se alcanza una mejor cobertura dando mayor informacioacuten acerca de la zona que aquella que se obtendriacutea de muestras muy agrupadas en unos sectores y separadas en otros Sin embargo en la praacutectica debido a las caracteriacutesticas de las regiones de estudio muchas veces es preciso tomar muestras irregularmente espaciadas
Las distancias entre las muestras para la prediccioacuten es maacutes confiable usar muestras vecinas que muestras distantes esto es la precisioacuten mejora cuando la cercaniacutea de las muestras aumenta y se deteriora cuando esta disminuye La extrapolacioacuten no es aconsejable
La continuidad espacial de la variable o atributo en estudio es maacutes faacutecil estimar el valor de una variable bastante regular en una regioacuten que una que presenta grandes fluctuaciones
Introduccioacuten a la teoriacutea del kriging
Supongamos que se tienen las mediciones Z(s1) Z(s2) Z(s3) y Z(s4) en los puntos s1 s2 s3 y s4 respectivamente y se requiere predecir el valor Z(s0) El valor a predecir se ubica mas cerca de s2 que de cualquier otra ubicacioacuten donde se tenga medicioacuten por lo tanto es loacutegico pensar que Z(s0) es mas parecido a Z(s2) que a cualquiera de los otros tres valores medidos De acuerdo a lo anterior se puede optar para la prediccioacuten por una media ponderada de las cuatro mediciones en la cual Z(s2) tiene mayor peso que cualquier otra seguida en su orden por Z(s4) Z(s3) y por uacuteltimo Z(s1)
Donde z(u) es el mejor predictor lineal de kriging
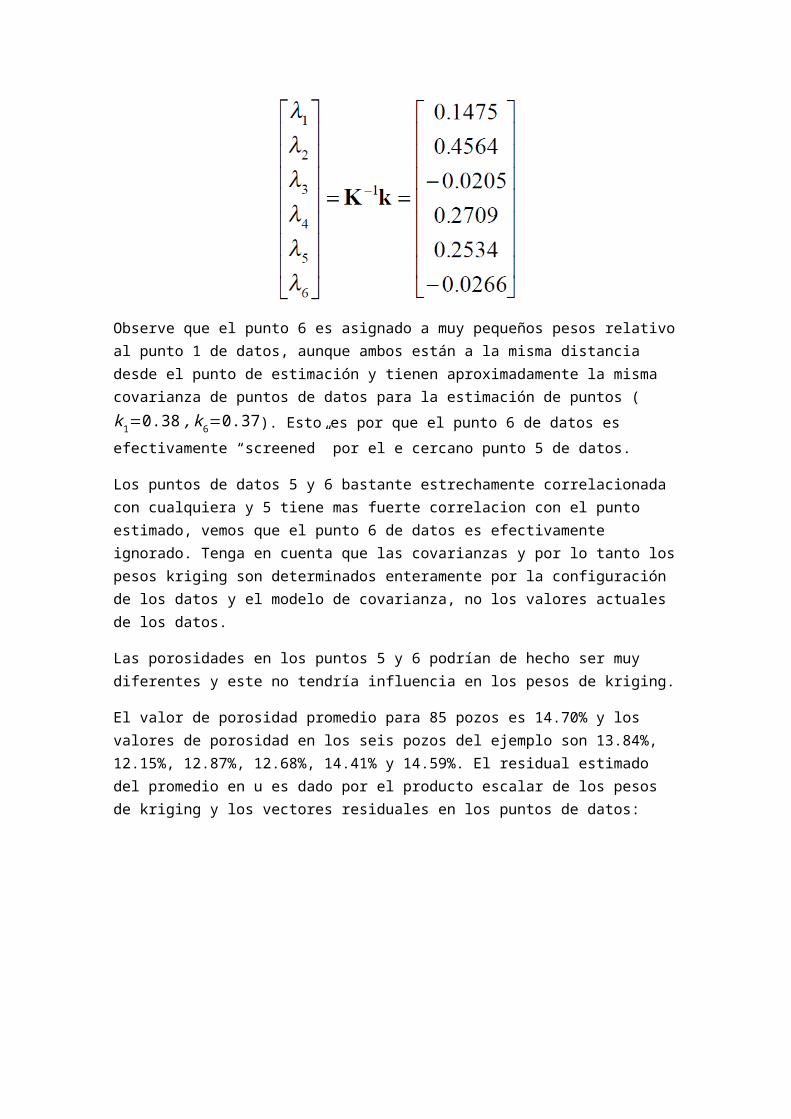
Kriging Ordinario
Para el Kriging ordinario en lugar de asumir que la media es constante en todo el dominio se supone que es constante en el vecindario local de cada punto de la estimacioacuten que es m(u)=m(u) para cada valor de los datos en las inmediacionesZ (uα) que usamos para estimar Z(u) En este caso el estimador Kriging puede ser escrito
y filtramos la media local desconocida al exigir que los pesos kriging sumen 1 dando lugar a un estimador kriging ordinario de
Zok(u)=sumα=1
n (u )
λαOK (u )Z (uα )
con
sumα=1
n (u)
λαOK (u )=1
Con el fin de minimizar la varianza del error sujeto a la restriccioacuten de la unidad de suma en los pesos que en realidad instalamos el sistema para que minimice el error de la varianza maacutes un teacutermino adicional que implica un paraacutemetro de Lagrange μOK (u)
L=σE2 (u )+μOK (u )[1minussum
α=1
n (u)
λα (u )]Asiacute la minimizacioacuten con respecto a las fuerzas del paraacutemetro de Lagrange la restriccioacuten seraacute
12partLpart μ
=1minussumα=1
n (u )
λα (u )=0
En este caso el sistema de ecuaciones para los pesos resulta ser
sumβ=1
n (u)
λβOK (u )CR (uαminusuβ )+μOK (u )=C R (uαminusu )
α=1 helliphellip n (u )
sumβ=1
n (u)
λβOK (u )=1
Donde CR (h ) es una vez maacutes la funcioacuten de covarianza para el componente residual de la
variable En Kriging simple podriacutease igualar CR (h ) y C (h ) la funcioacuten de covarianza para la
variable en si debido a la suposicioacuten de un promedio constante Esta cualidad no es fundamentada pero en la praacutectica la sustitucioacuten es generalmente hecho de todos modos en la suposicioacuten que el semivariograma a partir del cual C(h) es derivado efectivamente filtra la influencia de las tendencias de gran escala en la media
De hecho la restriccioacuten de la unidad de suma en los pesos permite el sistema kriging ordinario para ser declarado directamente en teacuterminos del semivariograma (en lugar de los valores CR (h ) de arriba) En este sentido el kriging ordinario es enfoque de interpolacioacuten que sigue naturalmente a partir de un anaacutelisis de semivariograma ya que ambas herramientas tienden a filtrar las tendencias en la media
Una vez que los pesos kriging (y el paraacutemetro de Lagrange) son obtenidos el error de varianza del kriging ordinario es dado por
En los teacuterminos de matriz el sistema de kriging ordinario es una versioacuten aumentada del sistema kriging simple Para nuestro ejemplo de seis puntos seriacutea
Cuya solucioacuten es
La estimacioacuten kriging ordinario en u =(2000 m4700m)resulta ser 1293 con una desviacioacuten estaacutendar de 0490 ligeramente diferentes de los valores de kriging simple de 1283 y 0488
Otra vez usando 16 vecinos maacutes cercanos para cada punto de estimacioacuten la estimacioacuten de porosidad por el kriging ordinario y la desviacioacuten estaacutendar se parecen mucho a las de kriging simple
Kriging con tendencia
El kriging con tendencia (el meacutetodo formalmente como kriging universal) es maacutes parecido al kriging ordinario excepto que en lugar de adecuar justo un promedio local en la vecindad de estimacioacuten de puntos adecuamos una tendencia lineal o de mayor orden en las cordenadas (xy) de los puntos de datos Un modelo de tendencia lineal local (por ejemplo de primer orden) seria dado por
Incluyendo el modelo en el sistema de kriging involucra el mismo tipo de estencion como usamos para el kriging ordinario con la adicioacuten con dos o maacutes paraacutemetros Lagrange y dos
columnas y filas extras en la matriz K de quien sus elementos (ninguno cero) estaacuten en las cordenadas x y y de los puntos de datos Tendencias de alto orden (cuadraacutetica cubica) podriacutea ser manejado de la misma forma pero en la praacutectica esto se raro usar cualquier funcioacuten de tendencia de alto orden que la tendencia de primer orden Kriging Ordinario es kriking con un modelo de tendencia de orden cero
Si la variable de intereacutes exhibe una tendencia significante una aproximacioacuten tiacutepica seriacutea intentar estimar un ldquode-tendenterdquo semivariograma usando uno de los meacutetodos descritos en la lectura de los semivariograma y luego alimentar esto dentro de kriging con una tendencia de primer orden Sin embargo Goovaerts (1997) advierte contra este enfoque y en su lugar recomienda presentar el kriging simple de los residuales de una tendencia global (con un promedio constante de 0) y luego antildeadiendo de nuevo los residuales kriging dentro de la tendencia global
Sea el campo aleatorio Z(s) s isin D sub Rd donde se ha observado el atributo Z en las ubicaciones n s s s 1 2 1048610 y se desear predecir dicho atributo en una ubicacioacuten no observada basaacutendose en los valores obtenidos en las muestras hechas Las teacutecnicas de prediccioacuten espacial son modalidades de una familia de meacutetodos llamada Kriging El nombre se debe al Ingeniero minero DG Krige quien desarrolloacute en la deacutecada de los 50 meacutetodos empiacutericos para predecir caracteriacutesticas de una mina en alguna ubicacioacuten de intereacutes donde no se conociacutean datos usando las caracteriacutesticas conocidas en lugares cercanos donde si habiacutean sido tomados Su meacutetodo original es conocido como Kriging ordinario
El Kriging aparece en muchas formas de acuerdo a si se conocen la media la distribucioacuten de probabilidad de Z(s) si las predicciones son hechas para puntos o aacutereas y asiacute sucesivamente
Sin embargo es importante recordar que el Kriging no es el uacutenico meacutetodo de prediccioacuten espacial existen meacutetodos determiniacutesticos como distancia inversa interpolacioacuten polinomial global interpolacioacuten polinomial local triangulacioacuten lineal funciones de base radial entre otros La ventaja del kriging sobre los meacutetodos determiniacutesticos es la estimacioacuten de la varianza del error de prediccioacuten lo cual permite ademaacutes estimar intervalos de confianza para dicha prediccioacuten ademaacutes de que el kriging es un meacutetodo de estimacioacuten que da el mejor estimador lineal insesgado (cuando se cumplen todos los supuestos) Inicialmente el kriging fue desarrollado para aquellos casos donde hay presencia de estacionariedad y posteriormente fue extendido para casos donde se cumple la hipoacutetesis intriacutenseca
Generalidades sobre el kriging
La toma de muestras da la informacioacuten de lo que ocurre en cada punto Sin embargo no da informacioacuten acerca de la relacioacuten que pueda existir entre dichos puntos Se requiere de una forma precisa de estimar valores en puntos intermedios o en el caso de bloques por ejemplo estimar el promedio sobre el bloque La precisioacuten del estimador usado depende de varios factores
El nuacutemero de muestras tomadas La calidad de la medicioacuten en cada punto Las ubicaciones de las muestras en la zona si las muestras son igualmente espaciadas
se alcanza una mejor cobertura dando mayor informacioacuten acerca de la zona que aquella que se obtendriacutea de muestras muy agrupadas en unos sectores y separadas en otros Sin embargo en la praacutectica debido a las caracteriacutesticas de las regiones de estudio muchas veces es preciso tomar muestras irregularmente espaciadas
Las distancias entre las muestras para la prediccioacuten es maacutes confiable usar muestras vecinas que muestras distantes esto es la precisioacuten mejora cuando la cercaniacutea de las muestras aumenta y se deteriora cuando esta disminuye La extrapolacioacuten no es aconsejable
La continuidad espacial de la variable o atributo en estudio es maacutes faacutecil estimar el valor de una variable bastante regular en una regioacuten que una que presenta grandes fluctuaciones
Introduccioacuten a la teoriacutea del kriging
Supongamos que se tienen las mediciones Z(s1) Z(s2) Z(s3) y Z(s4) en los puntos s1 s2 s3 y s4 respectivamente y se requiere predecir el valor Z(s0) El valor a predecir se ubica mas cerca de s2 que de cualquier otra ubicacioacuten donde se tenga medicioacuten por lo tanto es loacutegico pensar que Z(s0) es mas parecido a Z(s2) que a cualquiera de los otros tres valores medidos De acuerdo a lo anterior se puede optar para la prediccioacuten por una media ponderada de las cuatro mediciones en la cual Z(s2) tiene mayor peso que cualquier otra seguida en su orden por Z(s4) Z(s3) y por uacuteltimo Z(s1)
Donde z(u) es el mejor predictor lineal de kriging
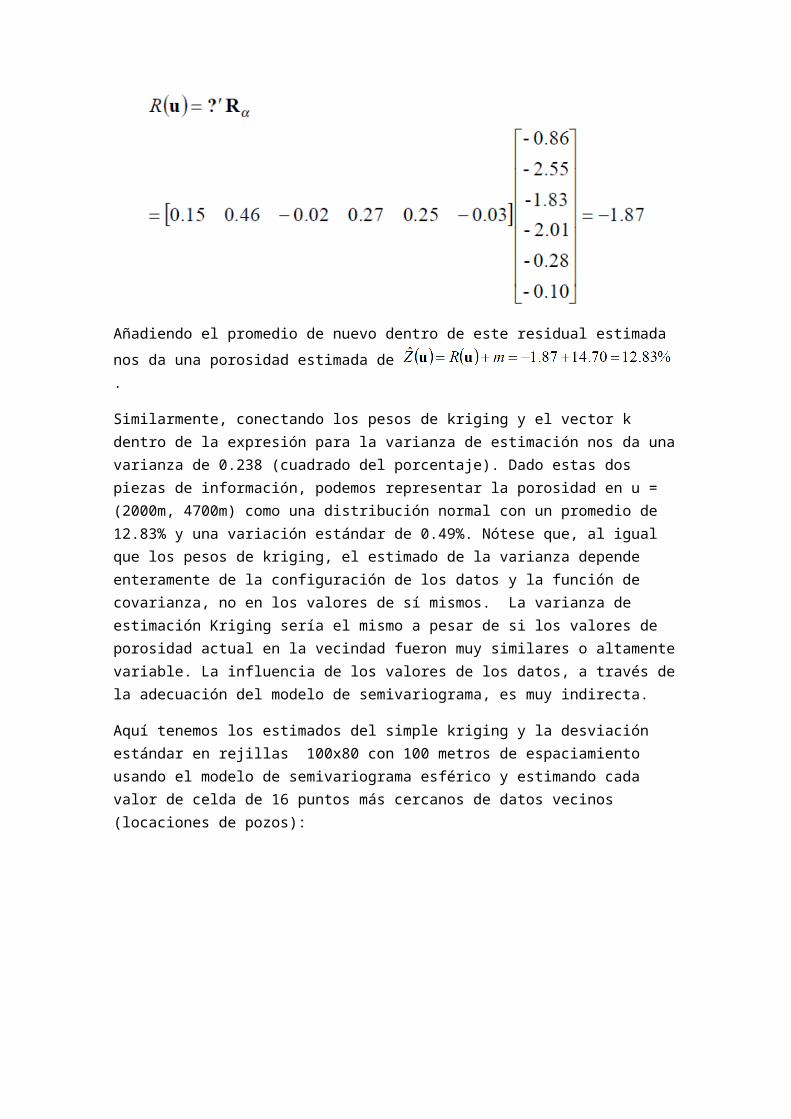
variable en si debido a la suposicioacuten de un promedio constante Esta cualidad no es fundamentada pero en la praacutectica la sustitucioacuten es generalmente hecho de todos modos en la suposicioacuten que el semivariograma a partir del cual C(h) es derivado efectivamente filtra la influencia de las tendencias de gran escala en la media
De hecho la restriccioacuten de la unidad de suma en los pesos permite el sistema kriging ordinario para ser declarado directamente en teacuterminos del semivariograma (en lugar de los valores CR (h ) de arriba) En este sentido el kriging ordinario es enfoque de interpolacioacuten que sigue naturalmente a partir de un anaacutelisis de semivariograma ya que ambas herramientas tienden a filtrar las tendencias en la media
Una vez que los pesos kriging (y el paraacutemetro de Lagrange) son obtenidos el error de varianza del kriging ordinario es dado por
En los teacuterminos de matriz el sistema de kriging ordinario es una versioacuten aumentada del sistema kriging simple Para nuestro ejemplo de seis puntos seriacutea
Cuya solucioacuten es
La estimacioacuten kriging ordinario en u =(2000 m4700m)resulta ser 1293 con una desviacioacuten estaacutendar de 0490 ligeramente diferentes de los valores de kriging simple de 1283 y 0488
Otra vez usando 16 vecinos maacutes cercanos para cada punto de estimacioacuten la estimacioacuten de porosidad por el kriging ordinario y la desviacioacuten estaacutendar se parecen mucho a las de kriging simple
Kriging con tendencia
El kriging con tendencia (el meacutetodo formalmente como kriging universal) es maacutes parecido al kriging ordinario excepto que en lugar de adecuar justo un promedio local en la vecindad de estimacioacuten de puntos adecuamos una tendencia lineal o de mayor orden en las cordenadas (xy) de los puntos de datos Un modelo de tendencia lineal local (por ejemplo de primer orden) seria dado por
Incluyendo el modelo en el sistema de kriging involucra el mismo tipo de estencion como usamos para el kriging ordinario con la adicioacuten con dos o maacutes paraacutemetros Lagrange y dos
columnas y filas extras en la matriz K de quien sus elementos (ninguno cero) estaacuten en las cordenadas x y y de los puntos de datos Tendencias de alto orden (cuadraacutetica cubica) podriacutea ser manejado de la misma forma pero en la praacutectica esto se raro usar cualquier funcioacuten de tendencia de alto orden que la tendencia de primer orden Kriging Ordinario es kriking con un modelo de tendencia de orden cero
Si la variable de intereacutes exhibe una tendencia significante una aproximacioacuten tiacutepica seriacutea intentar estimar un ldquode-tendenterdquo semivariograma usando uno de los meacutetodos descritos en la lectura de los semivariograma y luego alimentar esto dentro de kriging con una tendencia de primer orden Sin embargo Goovaerts (1997) advierte contra este enfoque y en su lugar recomienda presentar el kriging simple de los residuales de una tendencia global (con un promedio constante de 0) y luego antildeadiendo de nuevo los residuales kriging dentro de la tendencia global
Sea el campo aleatorio Z(s) s isin D sub Rd donde se ha observado el atributo Z en las ubicaciones n s s s 1 2 1048610 y se desear predecir dicho atributo en una ubicacioacuten no observada basaacutendose en los valores obtenidos en las muestras hechas Las teacutecnicas de prediccioacuten espacial son modalidades de una familia de meacutetodos llamada Kriging El nombre se debe al Ingeniero minero DG Krige quien desarrolloacute en la deacutecada de los 50 meacutetodos empiacutericos para predecir caracteriacutesticas de una mina en alguna ubicacioacuten de intereacutes donde no se conociacutean datos usando las caracteriacutesticas conocidas en lugares cercanos donde si habiacutean sido tomados Su meacutetodo original es conocido como Kriging ordinario
El Kriging aparece en muchas formas de acuerdo a si se conocen la media la distribucioacuten de probabilidad de Z(s) si las predicciones son hechas para puntos o aacutereas y asiacute sucesivamente
Sin embargo es importante recordar que el Kriging no es el uacutenico meacutetodo de prediccioacuten espacial existen meacutetodos determiniacutesticos como distancia inversa interpolacioacuten polinomial global interpolacioacuten polinomial local triangulacioacuten lineal funciones de base radial entre otros La ventaja del kriging sobre los meacutetodos determiniacutesticos es la estimacioacuten de la varianza del error de prediccioacuten lo cual permite ademaacutes estimar intervalos de confianza para dicha prediccioacuten ademaacutes de que el kriging es un meacutetodo de estimacioacuten que da el mejor estimador lineal insesgado (cuando se cumplen todos los supuestos) Inicialmente el kriging fue desarrollado para aquellos casos donde hay presencia de estacionariedad y posteriormente fue extendido para casos donde se cumple la hipoacutetesis intriacutenseca
Generalidades sobre el kriging
La toma de muestras da la informacioacuten de lo que ocurre en cada punto Sin embargo no da informacioacuten acerca de la relacioacuten que pueda existir entre dichos puntos Se requiere de una forma precisa de estimar valores en puntos intermedios o en el caso de bloques por ejemplo estimar el promedio sobre el bloque La precisioacuten del estimador usado depende de varios factores
El nuacutemero de muestras tomadas La calidad de la medicioacuten en cada punto Las ubicaciones de las muestras en la zona si las muestras son igualmente espaciadas
se alcanza una mejor cobertura dando mayor informacioacuten acerca de la zona que aquella que se obtendriacutea de muestras muy agrupadas en unos sectores y separadas en otros Sin embargo en la praacutectica debido a las caracteriacutesticas de las regiones de estudio muchas veces es preciso tomar muestras irregularmente espaciadas
Las distancias entre las muestras para la prediccioacuten es maacutes confiable usar muestras vecinas que muestras distantes esto es la precisioacuten mejora cuando la cercaniacutea de las muestras aumenta y se deteriora cuando esta disminuye La extrapolacioacuten no es aconsejable
La continuidad espacial de la variable o atributo en estudio es maacutes faacutecil estimar el valor de una variable bastante regular en una regioacuten que una que presenta grandes fluctuaciones
Introduccioacuten a la teoriacutea del kriging
Supongamos que se tienen las mediciones Z(s1) Z(s2) Z(s3) y Z(s4) en los puntos s1 s2 s3 y s4 respectivamente y se requiere predecir el valor Z(s0) El valor a predecir se ubica mas cerca de s2 que de cualquier otra ubicacioacuten donde se tenga medicioacuten por lo tanto es loacutegico pensar que Z(s0) es mas parecido a Z(s2) que a cualquiera de los otros tres valores medidos De acuerdo a lo anterior se puede optar para la prediccioacuten por una media ponderada de las cuatro mediciones en la cual Z(s2) tiene mayor peso que cualquier otra seguida en su orden por Z(s4) Z(s3) y por uacuteltimo Z(s1)
Donde z(u) es el mejor predictor lineal de kriging

Otra vez usando 16 vecinos maacutes cercanos para cada punto de estimacioacuten la estimacioacuten de porosidad por el kriging ordinario y la desviacioacuten estaacutendar se parecen mucho a las de kriging simple
Kriging con tendencia
El kriging con tendencia (el meacutetodo formalmente como kriging universal) es maacutes parecido al kriging ordinario excepto que en lugar de adecuar justo un promedio local en la vecindad de estimacioacuten de puntos adecuamos una tendencia lineal o de mayor orden en las cordenadas (xy) de los puntos de datos Un modelo de tendencia lineal local (por ejemplo de primer orden) seria dado por
Incluyendo el modelo en el sistema de kriging involucra el mismo tipo de estencion como usamos para el kriging ordinario con la adicioacuten con dos o maacutes paraacutemetros Lagrange y dos
columnas y filas extras en la matriz K de quien sus elementos (ninguno cero) estaacuten en las cordenadas x y y de los puntos de datos Tendencias de alto orden (cuadraacutetica cubica) podriacutea ser manejado de la misma forma pero en la praacutectica esto se raro usar cualquier funcioacuten de tendencia de alto orden que la tendencia de primer orden Kriging Ordinario es kriking con un modelo de tendencia de orden cero
Si la variable de intereacutes exhibe una tendencia significante una aproximacioacuten tiacutepica seriacutea intentar estimar un ldquode-tendenterdquo semivariograma usando uno de los meacutetodos descritos en la lectura de los semivariograma y luego alimentar esto dentro de kriging con una tendencia de primer orden Sin embargo Goovaerts (1997) advierte contra este enfoque y en su lugar recomienda presentar el kriging simple de los residuales de una tendencia global (con un promedio constante de 0) y luego antildeadiendo de nuevo los residuales kriging dentro de la tendencia global
Sea el campo aleatorio Z(s) s isin D sub Rd donde se ha observado el atributo Z en las ubicaciones n s s s 1 2 1048610 y se desear predecir dicho atributo en una ubicacioacuten no observada basaacutendose en los valores obtenidos en las muestras hechas Las teacutecnicas de prediccioacuten espacial son modalidades de una familia de meacutetodos llamada Kriging El nombre se debe al Ingeniero minero DG Krige quien desarrolloacute en la deacutecada de los 50 meacutetodos empiacutericos para predecir caracteriacutesticas de una mina en alguna ubicacioacuten de intereacutes donde no se conociacutean datos usando las caracteriacutesticas conocidas en lugares cercanos donde si habiacutean sido tomados Su meacutetodo original es conocido como Kriging ordinario
El Kriging aparece en muchas formas de acuerdo a si se conocen la media la distribucioacuten de probabilidad de Z(s) si las predicciones son hechas para puntos o aacutereas y asiacute sucesivamente
Sin embargo es importante recordar que el Kriging no es el uacutenico meacutetodo de prediccioacuten espacial existen meacutetodos determiniacutesticos como distancia inversa interpolacioacuten polinomial global interpolacioacuten polinomial local triangulacioacuten lineal funciones de base radial entre otros La ventaja del kriging sobre los meacutetodos determiniacutesticos es la estimacioacuten de la varianza del error de prediccioacuten lo cual permite ademaacutes estimar intervalos de confianza para dicha prediccioacuten ademaacutes de que el kriging es un meacutetodo de estimacioacuten que da el mejor estimador lineal insesgado (cuando se cumplen todos los supuestos) Inicialmente el kriging fue desarrollado para aquellos casos donde hay presencia de estacionariedad y posteriormente fue extendido para casos donde se cumple la hipoacutetesis intriacutenseca
Generalidades sobre el kriging
La toma de muestras da la informacioacuten de lo que ocurre en cada punto Sin embargo no da informacioacuten acerca de la relacioacuten que pueda existir entre dichos puntos Se requiere de una forma precisa de estimar valores en puntos intermedios o en el caso de bloques por ejemplo estimar el promedio sobre el bloque La precisioacuten del estimador usado depende de varios factores
El nuacutemero de muestras tomadas La calidad de la medicioacuten en cada punto Las ubicaciones de las muestras en la zona si las muestras son igualmente espaciadas
se alcanza una mejor cobertura dando mayor informacioacuten acerca de la zona que aquella que se obtendriacutea de muestras muy agrupadas en unos sectores y separadas en otros Sin embargo en la praacutectica debido a las caracteriacutesticas de las regiones de estudio muchas veces es preciso tomar muestras irregularmente espaciadas
Las distancias entre las muestras para la prediccioacuten es maacutes confiable usar muestras vecinas que muestras distantes esto es la precisioacuten mejora cuando la cercaniacutea de las muestras aumenta y se deteriora cuando esta disminuye La extrapolacioacuten no es aconsejable
La continuidad espacial de la variable o atributo en estudio es maacutes faacutecil estimar el valor de una variable bastante regular en una regioacuten que una que presenta grandes fluctuaciones
Introduccioacuten a la teoriacutea del kriging
Supongamos que se tienen las mediciones Z(s1) Z(s2) Z(s3) y Z(s4) en los puntos s1 s2 s3 y s4 respectivamente y se requiere predecir el valor Z(s0) El valor a predecir se ubica mas cerca de s2 que de cualquier otra ubicacioacuten donde se tenga medicioacuten por lo tanto es loacutegico pensar que Z(s0) es mas parecido a Z(s2) que a cualquiera de los otros tres valores medidos De acuerdo a lo anterior se puede optar para la prediccioacuten por una media ponderada de las cuatro mediciones en la cual Z(s2) tiene mayor peso que cualquier otra seguida en su orden por Z(s4) Z(s3) y por uacuteltimo Z(s1)
Donde z(u) es el mejor predictor lineal de kriging

columnas y filas extras en la matriz K de quien sus elementos (ninguno cero) estaacuten en las cordenadas x y y de los puntos de datos Tendencias de alto orden (cuadraacutetica cubica) podriacutea ser manejado de la misma forma pero en la praacutectica esto se raro usar cualquier funcioacuten de tendencia de alto orden que la tendencia de primer orden Kriging Ordinario es kriking con un modelo de tendencia de orden cero
Si la variable de intereacutes exhibe una tendencia significante una aproximacioacuten tiacutepica seriacutea intentar estimar un ldquode-tendenterdquo semivariograma usando uno de los meacutetodos descritos en la lectura de los semivariograma y luego alimentar esto dentro de kriging con una tendencia de primer orden Sin embargo Goovaerts (1997) advierte contra este enfoque y en su lugar recomienda presentar el kriging simple de los residuales de una tendencia global (con un promedio constante de 0) y luego antildeadiendo de nuevo los residuales kriging dentro de la tendencia global
Sea el campo aleatorio Z(s) s isin D sub Rd donde se ha observado el atributo Z en las ubicaciones n s s s 1 2 1048610 y se desear predecir dicho atributo en una ubicacioacuten no observada basaacutendose en los valores obtenidos en las muestras hechas Las teacutecnicas de prediccioacuten espacial son modalidades de una familia de meacutetodos llamada Kriging El nombre se debe al Ingeniero minero DG Krige quien desarrolloacute en la deacutecada de los 50 meacutetodos empiacutericos para predecir caracteriacutesticas de una mina en alguna ubicacioacuten de intereacutes donde no se conociacutean datos usando las caracteriacutesticas conocidas en lugares cercanos donde si habiacutean sido tomados Su meacutetodo original es conocido como Kriging ordinario
El Kriging aparece en muchas formas de acuerdo a si se conocen la media la distribucioacuten de probabilidad de Z(s) si las predicciones son hechas para puntos o aacutereas y asiacute sucesivamente
Sin embargo es importante recordar que el Kriging no es el uacutenico meacutetodo de prediccioacuten espacial existen meacutetodos determiniacutesticos como distancia inversa interpolacioacuten polinomial global interpolacioacuten polinomial local triangulacioacuten lineal funciones de base radial entre otros La ventaja del kriging sobre los meacutetodos determiniacutesticos es la estimacioacuten de la varianza del error de prediccioacuten lo cual permite ademaacutes estimar intervalos de confianza para dicha prediccioacuten ademaacutes de que el kriging es un meacutetodo de estimacioacuten que da el mejor estimador lineal insesgado (cuando se cumplen todos los supuestos) Inicialmente el kriging fue desarrollado para aquellos casos donde hay presencia de estacionariedad y posteriormente fue extendido para casos donde se cumple la hipoacutetesis intriacutenseca
Generalidades sobre el kriging
La toma de muestras da la informacioacuten de lo que ocurre en cada punto Sin embargo no da informacioacuten acerca de la relacioacuten que pueda existir entre dichos puntos Se requiere de una forma precisa de estimar valores en puntos intermedios o en el caso de bloques por ejemplo estimar el promedio sobre el bloque La precisioacuten del estimador usado depende de varios factores
El nuacutemero de muestras tomadas La calidad de la medicioacuten en cada punto Las ubicaciones de las muestras en la zona si las muestras son igualmente espaciadas
se alcanza una mejor cobertura dando mayor informacioacuten acerca de la zona que aquella que se obtendriacutea de muestras muy agrupadas en unos sectores y separadas en otros Sin embargo en la praacutectica debido a las caracteriacutesticas de las regiones de estudio muchas veces es preciso tomar muestras irregularmente espaciadas
Las distancias entre las muestras para la prediccioacuten es maacutes confiable usar muestras vecinas que muestras distantes esto es la precisioacuten mejora cuando la cercaniacutea de las muestras aumenta y se deteriora cuando esta disminuye La extrapolacioacuten no es aconsejable
La continuidad espacial de la variable o atributo en estudio es maacutes faacutecil estimar el valor de una variable bastante regular en una regioacuten que una que presenta grandes fluctuaciones
Introduccioacuten a la teoriacutea del kriging
Supongamos que se tienen las mediciones Z(s1) Z(s2) Z(s3) y Z(s4) en los puntos s1 s2 s3 y s4 respectivamente y se requiere predecir el valor Z(s0) El valor a predecir se ubica mas cerca de s2 que de cualquier otra ubicacioacuten donde se tenga medicioacuten por lo tanto es loacutegico pensar que Z(s0) es mas parecido a Z(s2) que a cualquiera de los otros tres valores medidos De acuerdo a lo anterior se puede optar para la prediccioacuten por una media ponderada de las cuatro mediciones en la cual Z(s2) tiene mayor peso que cualquier otra seguida en su orden por Z(s4) Z(s3) y por uacuteltimo Z(s1)
Donde z(u) es el mejor predictor lineal de kriging
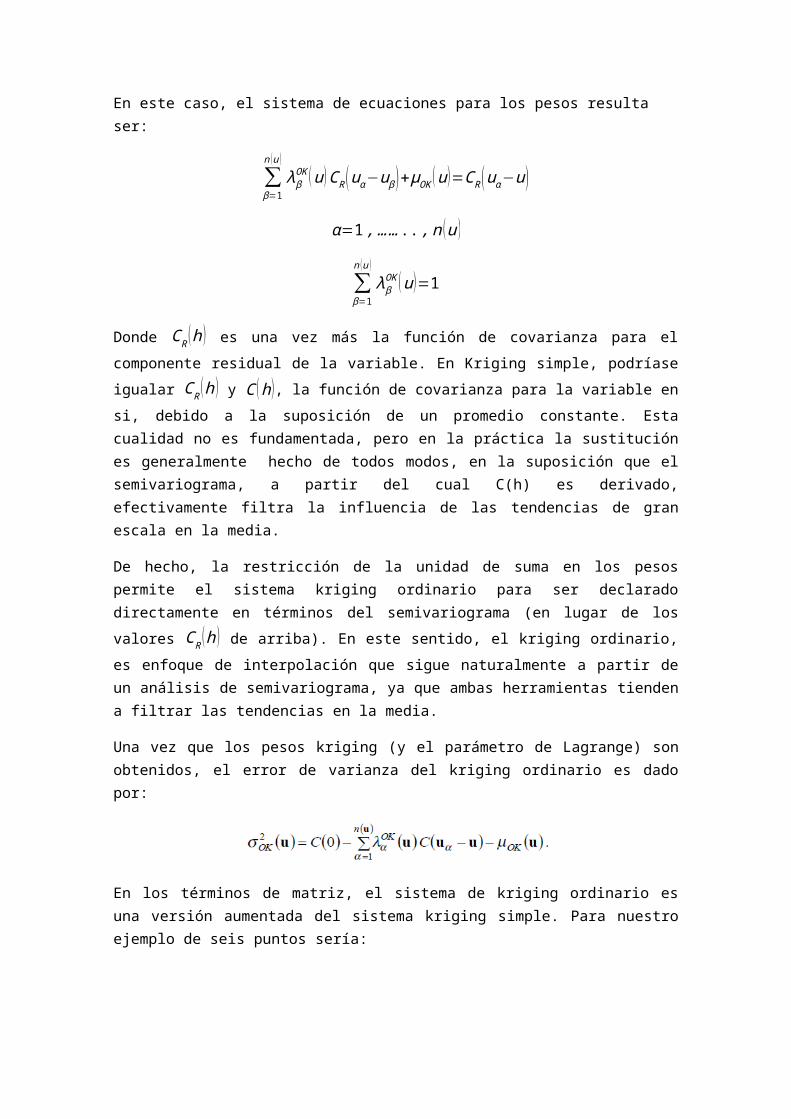
Sea el campo aleatorio Z(s) s isin D sub Rd donde se ha observado el atributo Z en las ubicaciones n s s s 1 2 1048610 y se desear predecir dicho atributo en una ubicacioacuten no observada basaacutendose en los valores obtenidos en las muestras hechas Las teacutecnicas de prediccioacuten espacial son modalidades de una familia de meacutetodos llamada Kriging El nombre se debe al Ingeniero minero DG Krige quien desarrolloacute en la deacutecada de los 50 meacutetodos empiacutericos para predecir caracteriacutesticas de una mina en alguna ubicacioacuten de intereacutes donde no se conociacutean datos usando las caracteriacutesticas conocidas en lugares cercanos donde si habiacutean sido tomados Su meacutetodo original es conocido como Kriging ordinario
El Kriging aparece en muchas formas de acuerdo a si se conocen la media la distribucioacuten de probabilidad de Z(s) si las predicciones son hechas para puntos o aacutereas y asiacute sucesivamente
Sin embargo es importante recordar que el Kriging no es el uacutenico meacutetodo de prediccioacuten espacial existen meacutetodos determiniacutesticos como distancia inversa interpolacioacuten polinomial global interpolacioacuten polinomial local triangulacioacuten lineal funciones de base radial entre otros La ventaja del kriging sobre los meacutetodos determiniacutesticos es la estimacioacuten de la varianza del error de prediccioacuten lo cual permite ademaacutes estimar intervalos de confianza para dicha prediccioacuten ademaacutes de que el kriging es un meacutetodo de estimacioacuten que da el mejor estimador lineal insesgado (cuando se cumplen todos los supuestos) Inicialmente el kriging fue desarrollado para aquellos casos donde hay presencia de estacionariedad y posteriormente fue extendido para casos donde se cumple la hipoacutetesis intriacutenseca
Generalidades sobre el kriging
La toma de muestras da la informacioacuten de lo que ocurre en cada punto Sin embargo no da informacioacuten acerca de la relacioacuten que pueda existir entre dichos puntos Se requiere de una forma precisa de estimar valores en puntos intermedios o en el caso de bloques por ejemplo estimar el promedio sobre el bloque La precisioacuten del estimador usado depende de varios factores
El nuacutemero de muestras tomadas La calidad de la medicioacuten en cada punto Las ubicaciones de las muestras en la zona si las muestras son igualmente espaciadas
se alcanza una mejor cobertura dando mayor informacioacuten acerca de la zona que aquella que se obtendriacutea de muestras muy agrupadas en unos sectores y separadas en otros Sin embargo en la praacutectica debido a las caracteriacutesticas de las regiones de estudio muchas veces es preciso tomar muestras irregularmente espaciadas
Las distancias entre las muestras para la prediccioacuten es maacutes confiable usar muestras vecinas que muestras distantes esto es la precisioacuten mejora cuando la cercaniacutea de las muestras aumenta y se deteriora cuando esta disminuye La extrapolacioacuten no es aconsejable
La continuidad espacial de la variable o atributo en estudio es maacutes faacutecil estimar el valor de una variable bastante regular en una regioacuten que una que presenta grandes fluctuaciones
Introduccioacuten a la teoriacutea del kriging
Supongamos que se tienen las mediciones Z(s1) Z(s2) Z(s3) y Z(s4) en los puntos s1 s2 s3 y s4 respectivamente y se requiere predecir el valor Z(s0) El valor a predecir se ubica mas cerca de s2 que de cualquier otra ubicacioacuten donde se tenga medicioacuten por lo tanto es loacutegico pensar que Z(s0) es mas parecido a Z(s2) que a cualquiera de los otros tres valores medidos De acuerdo a lo anterior se puede optar para la prediccioacuten por una media ponderada de las cuatro mediciones en la cual Z(s2) tiene mayor peso que cualquier otra seguida en su orden por Z(s4) Z(s3) y por uacuteltimo Z(s1)
Donde z(u) es el mejor predictor lineal de kriging
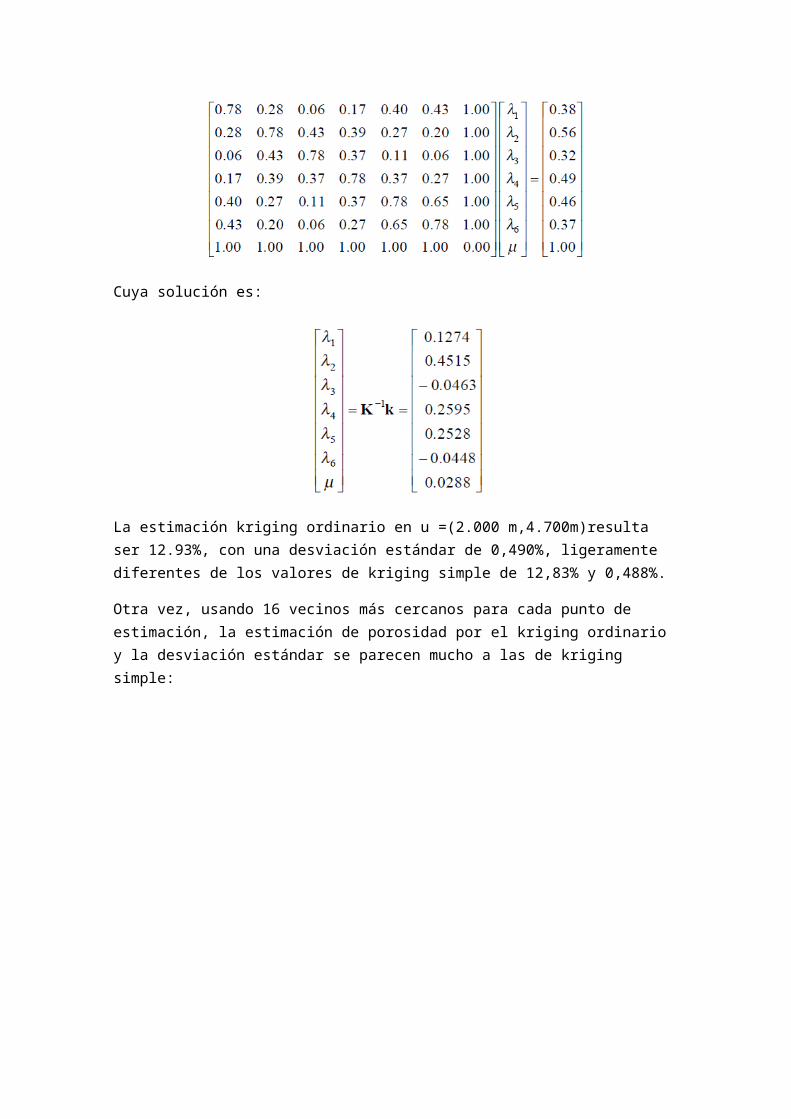
Introduccioacuten a la teoriacutea del kriging
Supongamos que se tienen las mediciones Z(s1) Z(s2) Z(s3) y Z(s4) en los puntos s1 s2 s3 y s4 respectivamente y se requiere predecir el valor Z(s0) El valor a predecir se ubica mas cerca de s2 que de cualquier otra ubicacioacuten donde se tenga medicioacuten por lo tanto es loacutegico pensar que Z(s0) es mas parecido a Z(s2) que a cualquiera de los otros tres valores medidos De acuerdo a lo anterior se puede optar para la prediccioacuten por una media ponderada de las cuatro mediciones en la cual Z(s2) tiene mayor peso que cualquier otra seguida en su orden por Z(s4) Z(s3) y por uacuteltimo Z(s1)
Donde z(u) es el mejor predictor lineal de kriging
Donde z(u) es el mejor predictor lineal de kriging